Document 11155773
advertisement

April 26, 2016 8:4 WSPC/INSTRUCTION FILE
paper
Mathematical Models and Methods in Applied Sciences
c World Scientific Publishing Company
EXPONENTIAL CONVERGENCE FOR hp-VERSION AND
SPECTRAL FINITE ELEMENT METHODS FOR ELLIPTIC
PROBLEMS IN POLYHEDRA
DOMINIK SCHÖTZAU
Department of Mathematics, University of British Columbia
1984 Mathematics Road, Vancouver, BC V6T 1Z2, Canada
schoetzau@math.ubc.ca
CHRISTOPH SCHWAB
Seminar for Applied Mathematics, ETH Zürich
Rämistrasse 101, 8092 Zürich, Switzerland
schwab@math.ethz.ch
Math. Models Methods Appl. Sci., Vol. 25, Issue 9, pp. 1617-1661, 2015
Received (Day Month Year)
Revised (Day Month Year)
Accepted (Day Month Year)
Communicated by (xxxxxxxxxx)
We establish exponential convergence of conforming hp-version and spectral finite element methods for second-order, elliptic boundary-value problems with constant coefficients and homogeneous Dirichlet boundary conditions in bounded, axiparallel polyhedra. The source terms are assumed to be piecewise analytic. The conforming hpapproximations are based on σ-geometric meshes of mapped, possibly anisotropic hexahedra and on the uniform and isotropic polynomial degree p ≥ 1. The principal new
results are the construction of conforming, patchwise hp-interpolation operators in edge,
corner and corner-edge patches which are the three basic building blocks of geometric
meshes. In particular, we prove, for each patch type, exponential convergence rates for
the H 1 -norm of the corresponding hp-version (quasi)interpolation errors for functions
which belong to a suitable, countably normed space on the patches. The present work
extends recent hp-version discontinuous Galerkin approaches to conforming Galerkin
finite element methods.
Keywords: hp-FEM, spectral FEM, second-order elliptic problems in polyhedra, exponential convergence
AMS Subject Classification: 65N30
1
April 26, 2016 8:4 WSPC/INSTRUCTION FILE
2
paper
Dominik Schötzau and Christoph Schwab
1. Introduction
The hp-version of the finite element method (FEM) is a realization of so-called
variable-degree, variable knot spline approximations in the context of Galerkin approximations for elliptic partial differential equations; cp. Refs. 6, 13 and the references therein. While in Refs. 6, 13 exponential convergence rates in L∞ -norm were
proved for particular singular functions in one space dimension, in Ref. 9 exponential convergence of hp-FEM in H 1 -norm was shown for a model second-order,
elliptic boundary-value problem, again with a model singular solution in one space
dimension. Subsequently, these concepts were substantially generalized to hp-version
FEMs for second-order, elliptic boundary-value problems in two space dimensions:
on the one hand, rather than for particular singular solutions, in Ref. 10 exponential convergence of hp-FEM on geometrically refined triangulations was now proved
for solutions belonging to countably normed, weighted Sobolev spaces. On the other
hand, in Ref. 1 an elliptic regularity shift theorem was shown in these spaces.
In recent years, the corresponding elliptic regularity shifts in countably normed,
weighted Sobolev spaces in polyhedral domains have been established in Refs. 11,
12, 4, at least for certain classes of second-order, elliptic boundary-value problems in
three dimensions. Based on these analytic regularity results, in Ref. 15, exponential
convergence in broken H 1 -norms has been proved for an hp-version discontinuous
Galerkin (DG) method for second-order, elliptic problems in axiparallel polyhedra.
Corresponding exponential convergence results on regular, anisotropic geometric
meshes of tetrahedral elements have been announced in Ref. 2.
The purpose of the present paper is to establish exponential convergence of conforming hp-version approximations on families of geometrically refined meshes of
axiparallel hexahedra, in the setting of Refs. 14, 15. Our proof consists in the construction of H 1 -conforming piecewise polynomial approximations of uniform polynomial degree p ≥ 1, by modifying our discontinuous hp-version base interpolants
from Ref. 15 with the aid of suitable polynomial trace lifting operators in the presence
of irregular geometric mesh refinements towards corners and edges. This construction is accompanied with the proof that the trace liftings thus constructed do not
disrupt the exponential convergence of the base interpolants.
Therefore, the main results of the paper are, for each geometric mesh patch
of corner, edge and corner-edge type, the construction and analysis of hp-version
patch projectors onto spaces of continuous, piecewise polynomials which converge
exponentially for solutions belonging belong to a certain analytic class of functions
in each patch type. By Céa’s lemma, this result in conjunction with the analytic
regularity in Ref. 4 implies exponential convergence of hp-FEM on polyhedra for
the model diffusion equation considered in the paper. We emphasize, however, that
the hp-patch approximation results proved here apply more generally to any solution
whose pull-backs into the reference patches belong to one of the weighted analytic
classes.
The present hp-version consistency error analysis covers, in particular, also spec-
April 26, 2016 8:4 WSPC/INSTRUCTION FILE
paper
hp-CGFEM for Elliptic Problems in Polyhedra
3
tral element methods; there, additional quadrature errors due to elemental underintegration arise, which are not dicussed in the present paper. We also mention that
conforming hp-FE spaces have been implemented in Refs. 8, 7.
The outline of this paper is as follows. In Section 2 we present an elliptic model
problem in an axiparallel polyhedral domain, and recapitulate the analytic regularity theory of Ref. 4 for solutions with piecewise analytic source terms. Section 3
addresses the construction of the hp-version subspaces, and it presents and discusses
our main result on exponential convergence of conforming hp-FEM. Section 4 reviews the construction and exponential error bounds of the base hp-version projector from Ref. 15 which are obtained by tensorization of univariate hp-projectors.
In Section 5, we construct and analyze polynomial trace liftings which preserve
exponential convergence estimates for all types of irregular interfaces.
The notation employed throughout this paper is consistent with that in Refs. 14,
15. In particular, we shall frequently use the notations ”.” or ”'” to mean an
inequality or an equivalence containing generic positive multiplicative constants
which are independent of the local mesh size, the polynomial degree p ≥ 1, the
regularity parameters, and the geometric refinement level `, but which may depend
on the geometric refinement ratio σ.
2. Elliptic Model Problem and Analytic Regularity
In this section, we introduce an elliptic model problem in an axiparallel polyhedron and specify the (analytic) regularity of its solutions in terms of countably
normed weighted Sobolev spaces. We follow Ref. 4, based on the notations already
introduced in Refs. 14, 15.
2.1. Model problem
Let Ω ⊂ R3 be an open, bounded and axiparallel polyhedron with Lipschitz boundary Γ = ∂Ω that consists of a finite union of plane faces. We consider the elliptic
boundary-value problem
−∇ · (A∇u) = f
γ0 (u) = 0
in Ω,
(2.1)
on Γ,
(2.2)
where γ0 denotes the trace operator on Γ. We assume that the diffusion tensor A is
constant and symmetric positive definite. With the standard Sobolev space H01 (Ω) =
{v ∈ H 1 (Ω) : γ0 (v) = 0}, the variational form of problem (2.1)–(2.2) is to find
u ∈ H01 (Ω) such that
Z
Z
a(u, v) :=
A∇u · ∇v dx =
f v dx
∀v ∈ H01 (Ω) .
(2.3)
Ω
Ω
Under the above assumptions, for every right hand side f in H −1 (Ω), the dual space
of H01 (Ω), problem (2.3) admits a unique weak solution u ∈ H01 (Ω).
April 26, 2016 8:4 WSPC/INSTRUCTION FILE
4
paper
Dominik Schötzau and Christoph Schwab
2.2. Subdomains and weights
We denote by C the set of corners c, and by E the set of open edges e of Ω. The
singular set of Ω is given by
[ [ S :=
c ∪
e ⊂ Γ.
(2.4)
c∈C
e∈E
For c ∈ C, e ∈ E, and x ∈ Ω, we define the following distance functions:
rc (x) := dist(x, c),
re (x) := dist(x, e),
ρce (x) := re (x)/rc (x).
(2.5)
As in Ref. 14, the vertices of Ω are assumed to be separated. For each corner c ∈ C,
we denote by Ec := { e ∈ E : c ∩ e 6= ∅ } the set of all edges which meet at c.
Similarly, for e ∈ E, the set of corners of e is Ce := { c ∈ C : c ∩ e 6= ∅ }. Then, for
ε > 0, c ∈ C, e ∈ E respectively e ∈ Ec , we define the neighborhoods
ωc = { x ∈ Ω : rc (x) < ε ∧ ρce (x) > ε ∀ e ∈ Ec },
ωe = { x ∈ Ω : re (x) < ε ∧ rc (x) > ε ∀ c ∈ Ce },
(2.6)
ωce = { x ∈ Ω : rc (x) < ε ∧ ρce (x) < ε }.
By choosing ε > 0 sufficiently small, the domain Ω can be partitioned into four
.
.
.
disjoint subdomains, Ω = ΩC ∪ ΩE ∪ ΩCE ∪ Ω0 , referred to as corner, edge, corneredge and interior neighborhoods of Ω, respectively, where
[
[ [
[
ωce ,
(2.7)
ΩC =
ωc ,
ΩE =
ωe ,
ΩCE =
c∈C
e∈E
c∈C e∈Ec
and Ω0 := Ω \ ΩC ∪ ΩE ∪ ΩCE .
2.3. Weighted Sobolev spaces
To each c ∈ C and e ∈ E, we associate a corner and an edge exponent βc , βe ∈ R, respectively, and introduce the vector β := {βc }c∈C ∪ {βe }e∈E ∈ R|C|+|E|. Inequalities
of the form β < 1 and expressions like β ± s are to be understood componentwise.
For e ∈ E or e ∈ Ec with c ∈ C, we choose local coordinate systems in ωe and ωce
such that the edge e corresponds to the direction (0, 0, 1). We indicate quantities
perpendicular to e by (·)⊥ , and quantities parallel to e by (·)k . In particular, if α =
(α1 , α2 , α3 ) ∈ N30 is a multi-index of order |α| = α1 + α2 + α3 , then we use the
notation α = (α⊥ , αk ) with α⊥ = (α1 , α2 ) and αk = α3 . We further write the
⊥
αk
α⊥
αk
partial derivative operator Dα as Dα = Dα
⊥ Dk , where D⊥ and Dk signify the
derivative operators in perpendicular and parallel directions. For k ∈ N0 , we then
introduce the weighted semi-norm
X n
X
2
kDα uk2L2 (Ω0 ) +
|u|2M k (Ω) :=
rcβc +|α| Dα u L2 (ωc )
β
c∈C
|α|=k
+
X
e∈E
β e + |α ⊥ | α
2
re
D u L2 (ωe )
+
XX
c∈C e∈Ec
β e + |α ⊥ |
rcβc +|α| ρce
Dα u
2
L2 (ωce )
o
(2.8)
.
April 26, 2016 8:4 WSPC/INSTRUCTION FILE
paper
hp-CGFEM for Elliptic Problems in Polyhedra
5
Pm
2
2
The norm k · kMβm (Ω) is defined by kukM m (Ω) = k=0 |u|M k (Ω) , and the weighted
β
β
Sobolev space Mβm (Ω) is obtained as the closure of C0∞ (Ω) with respect to the
norm k·kM m (Ω) . For an open, non-empty subset D ⊆ Ω, we denote by | · |Mβm (D)
β
and k · kMβm (D) the above semi-norm and norm, respectively, with all domains of
integration replaced by their intersections with D ⊆ Ω.
2.4. Analytic regularity of variational solutions
We adopt the following classes of analytic functions from Ref. 4 (Section 6.2).
Definition 2.1. For subdomains D ⊆ Ω the space Aβ (D) consists of all functions u
such that u ∈ Mβk (D) for all k ≥ 0, and such that there exists a constant Cu > 0
(independent of D) with the property that
|u|Mβk (D) ≤ Cuk+1 Γ(k + 1)
∀ k ∈ N0 ,
(2.9)
where Γ is the standard Gamma function satisfying Γ(k + 1) = k! for k ∈ N0 .
From Ref. 4 (Corollary 7.1), the following analytic regularity result holds.
Proposition 2.1. There are bounds bC , bE > 0 (depending on Ω and the coefficient
matrix A) such that, for weight exponent vectors b satisfying
0 ≤ b c < bC ,
the weak solution u ∈
H01 (Ω)
0 ≤ b e < bE ,
c ∈ C, e ∈ E,
(2.10)
in (2.3) of the Dirichlet problem (2.1)-(2.2) satisfies:
f ∈ A1−b (Ω) =⇒ u ∈ A−1−b (Ω) .
(2.11)
Remark 2.1. As in Ref. 15 (Remark 2.2), we exclude the limit cases bc = be = 0,
and assume without loss of generality that in (2.10) there holds
0 < bc < 1,
0 < be < 1,
c ∈ C, e ∈ E .
(2.12)
3. hp-Version Discretization and Exponential Convergence
In this section, we adjust the construction of hp-version finite element spaces on
geometric mesh families as presented in Refs. 14, 15 from the discontinuous to
the continuous Galerkin framework. Then, we introduce conforming hp-version finite element approximations, state our main exponential convergence result (Theorem 3.3), and outline the structure of its proof.
3.1. Geometric meshes
We start the construction of geometric meshes from a coarse regular and quasiuniform patch mesh M0 = {Qp }P
p =1 , which partitions Ω into P convex and axiparallel
hexahedra also referred to as patches. Throughout, we shall assume that the initial
mesh M0 is sufficiently fine so that an element K ∈ M0 has non-trivial intersection
F3
F3
F3
E1
E1
E1
E2
E2
E2
E3
E3
E3
E4
E4
E4
E5 8:4 WSPC/INSTRUCTION
E5
April 26, 2016
FILE
paper E5
E6
E6
E6
E7
E7
E7
E8
E8
E8
E9
E9
E9
N1
N1
N1
N2
N2
N2
6 Dominik Schötzau and Christoph Schwab
N3
N3
N3
N4
N4
N4
with at most one corner c ∈ C, and either none, one or several edges e ∈ Ec meetN5
N5
N5
ing in c. Each of these patch subdomains Qp ∈ M0 is the image under an affine
N6
N6
N36
e = (−1, 1)
e
mapping Gp of the reference patch domain Q
, i.e., Qp = Gp (Q).
N7
N7
N7
1
2
3
···
`
`0
e `,c
T
σ
1
2
3
···
`
`0
e `,c
T
σ
1
2
3
···
`
`0
e `,c
T
σ
e `,c,⊥
O
σ
e `,c,⊥
O
σ
e `,c,⊥
O
σ
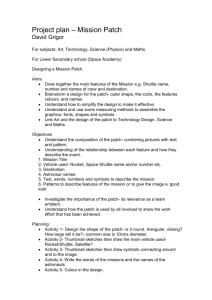
e with subdivision ratio σ = 0.5: corner
Fig. 1. Three geometric reference mesh patches on Q
f`,c
f`,e
patch M
σ with isotropic geometric refinement towards the corner c (left), edge patch Mσ with
f`,ce
anisotropic geometric refinement towards the edge e (center), and corner-edge patch M
with
σ
geometric refinement towards the corner-edge pair ce (right). The singular supports c, e, ce are
shown in bold face.
With each patch Qp ∈ M0 , we associate one of four types of geometric reference
fp on Q,
e as constructed in Ref. 14 (Section 3.3) in terms of four
mesh patches M
hp-extensions (Ex1)–(Ex4). That is,
fp ∈ RP
g := {M
f`,c , M
f`,e , M
f`,ce , M
f`,int } = {M
f`,t }t ∈{c,e,ce,int} .
M
σ
σ
σ
σ
σ
(3.1)
fp as a
More specifically, whenever Qp abuts at the singular set S, we take M
suitably rotated and oriented version of the geometrically refined reference mesh
f`,c
f`,e
patches shown in Figure 1 and denoted by M
σ (corner patch), Mσ (edge patch),
`,ce
f
and Mσ (corner-edge patch), respectively. We implicitly allow for simultaneous
f`,ce
geometric refinements towards several edges in the corner-edge patch M
σ , which
corresponds to an overlap of at most three rotated versions of the basic corneredge patch; see also Figures 10 and 11 ahead. The geometric refinements in these
reference patches are characterized by (i) a fixed parameter σ ∈ (0, 1) defining the
subdivision ratio of the geometric refinements and (ii) the index ` defining the number of refinements. For interior patches Qp ∈ M0 , which have empty intersection
fp a geometric reference mesh patch M
f`,int on Q,
e which
with S, we assign to M
σ
comprises only finitely many regular refinements and does not introduce irregular
e In the refinement process (i.e., as ` → ∞), the reference mesh M
f`,int
faces within Q.
σ
is left unchanged and is in fact independent of `.
fp ∈ RP
g introduces the corresponding
The geometric reference mesh patch M
f
e K
e ∈M
fp } on Qp , where
patch partition Mp = Gp (Mp ) := {K : K = Gp (K),
Gp is the affine patch map. To ensure continuity across mesh patches Mp , we shall
always work under the following inter-patch compatibility hypothesis.
Assumption 3.1. For p 6= p 0 , let Qp , Qp 0 ∈ M0 be two distinct patches with
April 26, 2016 8:4 WSPC/INSTRUCTION FILE
paper
hp-CGFEM for Elliptic Problems in Polyhedra
7
non-empty intersection Γp p 0 := Qp ∩ Qp 0 6= ∅. Then the parametrizations induced
by patch maps onpatch interfaces Γp p 0 are assumed to coincide “from either side”:
Gp ◦ G−1
= Gp 0 ◦ G−1
p |Γp p 0 . In addition, the mesh patches Mp , Mp 0
p 0 |Γ p p 0
are assumed to coincide on Γp p 0 .
Hence, for fixed parameters σ ∈ (0, 1) and ` ∈ N, a σ-geometric mesh on Ω is
now given by the disjoint union
M = M(`)
σ :=
P
[
p =1
Mp .
(3.2)
By construction, each axiparallel element K ∈ M is the image of the reference
b under an element mapping K = ΦK (K),
b where ΦK is the composition of
cube K
b
the corresponding patch map Gp with an anisotropic dilation-translation from K
to K. To achieve a proper geometric refinement towards corners and edges of Ω
without violating Assumption 3.1, the geometric refinements Mp in the patches Qp
have to be suitably selected and oriented. For a fixed subdivision ratio σ ∈ (0, 1), we
(`)
call the sequence Mσ = {Mσ }`≥1 of geometric meshes a σ-geometric mesh family;
see Ref. 14 (Definition 3.4). As before, we shall refer to the index ` as refinement
level.
We denote the sets of all interior and boundary edges e of a geometric mesh M
by EI (M) and EB (M), respectively, and set E(M) := EI (M) ∪ EB (M). We denote
by eK,K 0 = int(∂K ∩ ∂K 0 ) an edge shared by K and K 0 . Similarly, we write FI (M)
and FB (M) for the sets of interior and boundary faces f of M, respectively, and
define F(M) := FI (M) ∪ FB (M). Again, we write fK,K 0 = int(∂K ∩ ∂K 0 ) for the
interior face shared by K and K 0 . For a piecewise smooth function v, we denote the
jump of v over the face fK,K 0 by
[[v]]fK,K 0 := v|K − v|K 0 .
(3.3)
Moreover, for an element K, we denote by EK the set of its elemental edges, and by
FK the set of its elemental faces. We call an edge e regular if e is an entire elemental
face of all elements K sharing it (i.e., if e ∩ K 6= ∅, then e ∈ EK ). Otherwise e is
called irregular. Analogously, a face f = fK,K 0 is called regular if f is an elemental
face of both K and K 0 (i.e., f ∈ FK and f ∈ FK 0 ); otherwise it is irregular. We
shall always assume that boundary edges or faces belong to exactly one boundary
plane of Γ. For the continuity of finite element functions across elements, we impose
the following assumption.
Assumption 3.2. Under Assumption 3.1, for any two, distinct elements K, K 0 ∈
M which share either a common edge eK,K 0 or an interior face fK,K 0 the traces of
the elemental polynomial spaces on eK,K 0 or fK,K 0 in local coordinates (induced by
the corresponding patch maps) coincide.
(`)
Following Ref. 14, we may partition a geometric mesh Mσ into interior ele-
April 26, 2016 8:4 WSPC/INSTRUCTION FILE
8
paper
Dominik Schötzau and Christoph Schwab
ments O`σ away from S and into the terminal layer elements T`σ at S:
.
`
`
M(`)
σ := Oσ ∪ Tσ ,
(`)
(3.4)
(`)
with O`σ := {K ∈ Mσ : K ∩ S = ∅} and T`σ := {K ∈ Mσ : K ∩ S 6= ∅}. The
interior mesh O`σ can be further disjointly partitioned into ` mesh layers of the form
.
.
O`σ = L0σ ∪ · · · ∪ L`−1
σ ,
(3.5)
0
where mesh layer 0 ≤ `0 ≤ ` − 1 consists of a group L`σ of elements with identical
scaling properties; cp. Ref. 15 (Section 3).
(`)
Next, we establish some anisotropic scaling properties. For K ∈ Mσ , we set
hK := diam(K). As in Refs. 14, 15, for possibly anisotropic edge-patch and cornerk
edge patch elements K, we denote by h⊥
K and hK the elemental diameters of K
transversal respectively parallel to the singular edge e ∈ E situated nearest to K,
e = G−1
defined as the corresponding quantities over the axiparallel element K
p (K).
`
If K ∈ Oσ , these quantities are related to the relative distances to the sets C
and E; cp. Ref. 15 (Proposition 3.2). Corner-patch and interior-patch elements are
k
(`)
⊥
isotropic, with hK ' h⊥
K ' hK . We further denote by hK,F the height of K ∈ Mσ
in direction perpendicular to F ∈ FK , also defined as the corresponding height in
e = G−1
the axiparallel element K
p (K). As in Ref. 15 (Section 5.1.4), we may assume
(`)
without loss of generality that K ∈ Mσ can be written in the form
k
k
K = K ⊥ × K k = (0, hK )2 × (0, hK ).
(3.6)
b →K
Lemma 3.1. Let K be an axiparallel element of the form (3.6) and ΦK : K
the element transformation. For v : K → R and vb = v ◦ ΦK , we have the scalings:
k
2
v k2L2 (K)
(i) kvk2L2 (K) ' (h⊥
K ) hK kb
b .
k
k
2
b v k2
(ii) If h⊥
K . hK , then k∇vkL2 (K) . hK k∇b
b .
L2 (K)
b
' h⊥
(iii) If f ∈ FK is an elemental face of K with h⊥
K and f the correspond K,f −1
k
b then kb
kvk2L2 (f ) .
ing reference face of K,
v k2L2 (fb) ' h⊥
K hK
Proof. The following more general scaling property was established in Ref. 15
(Equation (5.11)):
h⊥ 2|α⊥ |−2 hk 2αk −1
⊥
αk
2
K
K
b α⊥ D
b αk vbk2 2
kDα
kD
=
⊥ Dk vkL2 (K) .
⊥
b
k
L (K)
2
2
(3.7)
The L2 -norm scaling in item (i) is an immediate consequence of (3.7). Similarly, we
see that
k
b ⊥ vbk2 2 ,
kD⊥ vk2L2 (K) ' hK kD
b
L (K)
k
k
2
−1 b
kDk vk2L2 (K) ' (h⊥
kDk vbk2L2 (K)
K ) (hK )
b .
⊥
⊥
Hence, if h⊥
K . hK , item (ii) follows. To show item (iii), we note that hK,f ' hK
k
implies that f can be written in the form f = (0, h⊥
K ) × (0, hK ). Hence, item (iii)
follows from a similar L2 -norm scaling argument.
April 26, 2016 8:4 WSPC/INSTRUCTION FILE
paper
hp-CGFEM for Elliptic Problems in Polyhedra
9
Finally, we establish an anisotropic jump estimate. To state it, we define the
weighted H 1 (K)-norm:
−2
NK [v]2 := h⊥
kvk2L2 (K) + k∇vk2L2 (K) ,
K ∈ M(`)
(3.8)
min,K
σ .
⊥
with h⊥
min,K := minF ∈FK {hK,F }. We then consider an interior face fK,K 0 parallel
to a singular edge e and shared by two axiparallel and possibly non-matching hexahedra K, K 0 of the form K = K ⊥ × (0, hk ) and K 0 = (K 0 )⊥ × (0, hk ), cp. (3.6). The
elements K ⊥ , (K 0 )⊥ are shape-regular rectangles with diam(K ⊥ ) ' diam((K 0 )⊥ ) '
h⊥ , for h⊥ . hk .
Lemma 3.2. In the setting above and for a piecewise smooth function v, we have
(h⊥ )−1 k[[v]]fK,K 0 k2L2 (fK,K 0 ) . NK [v]2 + NK 0 [v]2 .
(3.9)
⊥
⊥
⊥
⊥
Proof. We have h⊥
K,fK,K 0 ' hK 0 ,fK,K 0 ' hmin,K ' hmin,K 0 ' h . Hence, applying
the anisotropic trace inequality from Ref. 14 (Lemma 4.2 with t = 2) yields
k[[v]]fK,K 0 k2L2 (fK,K 0 ) . kv|K k2L2 (fK,K 0 ) + kv|K 0 k2L2 (fK,K 0 )
. (h⊥ )−1 kvk2L2 (K) + kvk2L2 (K 0 ) + h⊥ k∇vk2L2 (K) + k∇vk2L2 (K 0 ) .
The bound (3.9) follows.
3.2. hp-Version discretizations
The conforming finite element spaces to be considered here are based on the uniform
and isotropic polynomial degree p ≥ 1 (throughout K ∈ M). For a geometric
mesh M satisfying Assumptions 3.1, 3.2, we introduce two hp-version finite element
spaces
Vp (M) := v ∈ H 1 (Ω) : v|K ∈ Qp (K), K ∈ M ,
(3.10)
Vp0 (M) := Vp (M) ∩ H01 (Ω).
Here,
First,
space
ment
n
the local polynomial approximation space Qp (K) is defined as follows.
b we introduce the tensor-product polynomial
on the reference element K,
α
b := span { x̂ : αi ≤ p, 1 ≤ i ≤ 3 }. Then, for an hexahedral eleQp (K)
b → K, we set Qp (K) :=
K ∈ M with elemental mapping
ΦK : K
o
2
b . As compared to discontinuous spaces considv ∈ L (K) : (v|K ◦ ΦK ) ∈ Qp (K)
ered Refs. 14, 15, the spaces in (3.10) now feature interelement continuity and
essential boundary conditions in the presence of geometric mesh refinements.
(`)
Under Assumptions 3.1, 3.2, let Mσ = {Mσ }`≥1 be a σ-geometric mesh family
and µ > 0 a proportionality parameter. Then we consider the sequence {V σ` }`≥1 of
hp-version spaces of uniform polynomial degree p` given by
Vσ` := Vp0` (M(`)
σ ),
with p` := max{3, bµ`c},
` ≥ 1.
(3.11)
Here we note that, as in Ref. 15, we shall always work under the (purely technical)
assumption that p` ≥ 3; cp. Lemma 4.1 below.
April 26, 2016 8:4 WSPC/INSTRUCTION FILE
10
paper
Dominik Schötzau and Christoph Schwab
Remark 3.1. Due to the occurence of irregular faces and edges in the geometric
refinements, it is a-priori not clear that the spaces (3.10), (3.11) are well-defined.
That these definitions, indeed, define proper linear subspaces will follow from our
construction of polynomial trace liftings in Section 5 ahead.
With the definition (3.11) of the hp-FE spaces in place, the hp-version Galerkin
discretization of the variational formulation (2.3) reads as usual:
Z
`
`
`
f vdx ∀v ∈ Vσ` .
(3.12)
uσ ∈ Vσ : a(uσ , v) =
Ω
For ` ≥ 1, the discrete problem (3.12) has a unique solution u`σ which is quasioptimal: there exists a constant C > 0 (depending only on the domain Ω and the
coefficient matrix A) such that for all parameters σ, ` there holds
ku − u`σ kH 1 (Ω) ≤ C inf ku − vkH 1 (Ω) .
v∈Vσ`
(3.13)
3.3. Exponential convergence
Our main convergence result is as follows.
(`)
Theorem 3.3. Let Mσ = {Mσ }`≥1 be a family of σ-geometric meshes on Ω,
and consider the hp-version discretizations based on the sequence V σ` of subspaces
defined in (3.11). Then, for weight exponents b as in (2.12) and ` ≥ 1, there exist
6
6
(Ω) we have
(Ω) → Vσ` such that for u ∈ A−1−b (Ω) ⊂ M−1−b
projectors Π` : M−1−b
the bound
u − Π` u
H 1 (Ω)
≤ C exp (−b`) .
(3.14)
The constants b, C > 0 are independent of `, but depend on the subdivision ratio σ,
the patch mesh M0 with its associated patch maps, the weight exponents b > 0 (see
Remark 2.1), the proportionality constant µ > 0 in (3.11), and on the constant C u
in the analytic regularity estimate (2.9).
In particular, if the source term f in the boundary-value problem (2.1)–(2.2) belongs to A1−b (Ω) with weights as in (2.12) (and hence the solution u is in A−1−b (Ω)
by Proposition 2.1), then, as ` → ∞, the hp-version approximations u `σ in (3.12)
converge exponentially
√ 5
(3.15)
u − u`σ H 1 (Ω) ≤ C exp −b N ,
where the constants b, C > 0 are independent of N = dim(Vσ` ), the number of
degrees of freedom of the hp-FE discretization.
3.4. Outline of proof
We first note that the error bound (3.15) is an immediate consequence of the quasioptimality property (3.13) and the exponential consistency bound (3.14) (noting
that N ' `5 ). Therefore, the proof of Theorem 3.3 will follow from the construction
April 26, 2016 8:4 WSPC/INSTRUCTION FILE
paper
hp-CGFEM for Elliptic Problems in Polyhedra
11
and exponential convergence estimates for the hp-version (quasi)interpolants Π ` .
These estimates are of independent interest, and the rest of the paper is devoted to
their proof, which is structured as follows.
The hp-version projector Π` in (3.14) will be assembled from corresponding
patch projectors Π`p for 1 ≤ p ≤ P . To do so, consider the mesh patch Mp =
fp ) on Qp . Then, with the geometric reference mesh patch M
fp , we associate
G p (M
`
e
f
a reference patch projector Πp on Mp , which, in accordance with the four types of
fp ∈ RP
g in (3.1), is taken as one of four types
geometric refinements chosen for M
of reference patch projectors
e `,t
Π
f`,t ,
on M
σ
t ∈ {c, e, ce, int}.
(3.16)
On the physical patch Mp , the patch projector Π`p is then defined via
e ` (u|Qp ◦ Gp ).
(Π`p u)|Qp ◦ Gp = Π
p
(3.17)
The inter-patch continuity of the projector Π` defined patchwise as Π` |Qp = Π`p
will follow from Assumptions 3.1, 3.2.
Then the proof of (3.14) proceeds by bounding the H 1 -norms of
ηp := u|Qp − Π`p u|Qp ,
p = 1, . . . , P ,
e given by
respectively the pull-backs ηep to the reference patch Q
e` u
ηep := u
ep − Π
p ep ,
p = 1, . . . , P ,
(3.18)
(3.19)
e For a finite
where u
ep = u|Qp ◦ Gp is the pull-back of u|Qp to the reference patch Q.
set D of axiparallel elements K, we introduce the quantity
X
ΥD [v] :=
NK [v]2 ,
(3.20)
K∈D
with NK [v] defined in (3.8).
ηp ].
Lemma 3.3. For 1 ≤ p ≤ P , there holds ΥMp [ηp ] ' ΥM
fp [e
Proof. This follows from the construction of the patch mesh M0 ; cp. also the
boundedness properties of the patch maps in Ref. 14 (Section 3.1).
By employing (3.18), (3.19) and Lemma 3.3, the approximation error in (3.14)
can be bounded by
ku − Π` uk2H 1 (Ω) ≤
P
X
ΥMp [ηp ] .
P
X
ηp ].
ΥM
fp [e
(3.21)
p =1
p =1
Then, we notice that, up to rotation and orientation, there are four types of reference
g in (3.1). Hence, to bound the right-hand side of (3.21), it is
mesh patches in RP
enough to provide error estimates for the four reference cases and we have
X
ku − Π` uk2H 1 (Ω) ≤
[e
ηt ],
(3.22)
ΥM
f`,t
σ
t ∈{c,e,ce,int}
April 26, 2016 8:4 WSPC/INSTRUCTION FILE
12
paper
Dominik Schötzau and Christoph Schwab
e `,t u
e We observe that, due to the
with ηet := u
e−Π
e for the pull-back u
e of u to Q.
patch maps being affine with (up to rotations and reflections) diagonal Jacobian, the
analytic regularity (2.11) of solutions u ∈ H01 (Ω) to (2.1)–(2.2) is preserved under
e In particular, the pull-back u
pull-back into the reference patch coordinates on Q.
e
e
e with weighting
of u to Q belongs to an analytic regularity reference class At (Q)
depending on the type t ∈ {c, e, ce, int}. As in Section 2.2, these reference classes
are defined in terms of correspondingly weighted reference semi-norms | · |M k (Q)
e
t
e as will be detailed in (4.11), (4.12), (4.13) and (4.14) for any
and spaces M m (Q),
t
type t ∈ {c, e ce, int}.
To define the reference patch projectors with exponential error bounds (3.14)
f`,t , we proceed in two steps: first, we
on the geometric reference mesh patches M
σ
introduce base hp-projectors
π
eb`,t
on
f`,t ,
M
σ
t ∈ {c, e, ce, int},
(3.23)
with exponential approximation bounds under the analytic regularity property
in (2.9). As base projectors, we choose the non-conforming and tensorized proe The exponential
jectors constructed in Ref. 15 and well-defined for u
e ∈ Mt6 (Q).
convergence estimates in broken Sobolev norms established in Ref. 15 (Section 5)
apply directly on each mesh patch:
e :
t ∈ {c, e, ce, int}, u
e ∈ At (Q)
ΥM
[e
u−π
eb`,t u
e] ≤ C exp(−2b`),
f`,t
σ
(3.24)
with constants b, C > 0 independent of `.
The base approximations π
eb`,t are nodally exact, continuous over matching faces
and regular vertices and satisfy the homogeneous essential boundary conditions
exactly (on corresponding patch boundary faces). However, the base approximations π
eb`,t are in general discontinuous across irregular inter-element faces, edges
and vertices. To ensure inner-patch continuity (necessary for H 1 -conformity) in
geometrically refined patches, the next step of our proof therefore consists in constructing jump lifting operators Let , t ∈ {c, e, ce}, which remove the polynomial
jumps in the base hp-projectors while preserving their exponential convergence estimates and the essential boundary conditions. These polynomial jump-liftings will
be introduced and their stability will be analyzed in Section 5. The resulting reference patch hp-projectors
e `,t := π
Π
eb`,t + Let ,
t ∈ {c, e, ce},
(3.25)
then yield continuous, piecewise polynomial approximations, without disrupting
the exponential convergence bounds in (3.24). In fact, we establish the following
stability estimate, separately for each reference patch.
e we let ηet = u
e `,t u
Proposition 3.1. For t ∈ {c, e, ce, int} and u
e ∈ Mt6 (Q),
e−Π
e
`,t
and ηeb,t = u
e−π
eb u
e. Then we have
[e
ηb,t ],
[e
ηt ] . p18 ΥM
ΥM
f`,t
f`,t
σ
σ
(3.26)
April 26, 2016 8:4 WSPC/INSTRUCTION FILE
paper
hp-CGFEM for Elliptic Problems in Polyhedra
13
for any t ∈ {c, e, ce, int}.
We now conclude the proof of the bound (3.14). The constructions of the reference patch hp-projectors lead to a family {Π` }`≥1 of globally conforming, piecewise
6
polynomial and bounded hp-version (quasi)interpolants Π` : M−1−b
(Ω) → Vσ` . They
satisfy the homogeneous essential boundary conditions, and, by (3.22) and Proposition 3.1, converge at the same rates as the base projectors π
eb`,t on each of the
`,t
f , up to an algebraic loss in the polynomial degree p:
reference mesh patches M
σ
X
`
ΥM
[e
ηb,t ] .
(3.27)
ku − Π uk2H 1 (Ω) . p18
f`,t
σ
t ∈{c,e,ce,int}
e belongs to one of the
As before, for u ∈ A−1−b (Ω), the pull-back u
e of u|Qp to Q
e of type t ∈ {c, e, ce, int}. The proof of (3.14) then
analytic reference classes At (Q)
follows from (3.27) and the exponential convergence rates of the base interpolants
in (3.24). The algebraic loss in p in (3.27) is absorbed by suitably adjusting the
constants b, C in the exponential convergence bounds.
Remark 3.2. The exponential error bounds for the hp-base interpolants in this
section are based on the patchwise analytic regularity assumptions in (3.24) of the
solution u
e in local, patch coordinates, which are satisfied in the axi-parallel case
considered here. Our construction of exponentially consistent, H 1 -conforming hpinterpolants can be readily extended to curvilinear patches. The exponential convergence bounds in Theorem 3.3 hold, provided that the pull-backs u
e of the solution u
on the patches belongs to one of the analytic regularity reference classes and the
patch maps satisfy Assumptions 3.1, 3.2.
Remark 3.3. The relatively large, algebraic loss in p in (3.26), (3.27) is an upper
bound. It is a consequence of our trace liftings being taken as (bi)linear functions,
rather than as polynomials of degree p (which is compatible with the constant
polynomial degree p). By using polynomial trace-liftings with “minimal energy”, as
constructed in Ref. 17 (Lemma 9.1) or Ref. 18, these exponents can be reduced.
It remains to review the definitions of the base projectors in (3.23) and the
bounds (3.24) from Ref. 15 (Section 5). This will be done in Section 4. Finally, in
Section 5, we present the construction and analysis of the polynomial jump liftings
in (3.25) and prove Proposition 3.1.
4. Base Projectors and Exponential Convergence
In this section, we specify the non-conforming and tensorized hp-version base projectors in (3.23) and review their exponential convergence properties (3.24).
4.1. Tensorization of univariate hp-projectors
We begin by introducing the univariate hp-approximation operators from Ref. 5.
b be
To that end, let Ib = (−1, 1) denote the unit interval. For p ≥ 0, we let Pp (I)
April 26, 2016 8:4 WSPC/INSTRUCTION FILE
14
paper
Dominik Schötzau and Christoph Schwab
the space of univariate polynomials on Ib of degree less or equal than p. We denote
b → Pp (I)
b the L2 (I)-projection.
b
by π
bp,0 : L2 (I)
We will base our analysis on the
univariate and C 1 -conforming hp-projectors π
bp,2 constructed in Ref. 5 (Section 8).
b → Pp (I)
b that
Lemma 4.1. For p ≥ 3, there is a unique projector π
bp,2 : H 2 (I)
(2)
(2)
(j)
(j)
satisfies (b
πp,2 v) = π
bp−2,0 (v ) and (b
πp,k v) (±1) = v (±1) for j = 0, 1.
b cp. Ref. 5 (Proposition 8.4). Moreover, hpThe projector π
bp,2 is stable in H 2 (I),
version approximation properties of π
bp,2 were established in Ref. 5 (Theorem 8.3).
Next, we tensorize the one-dimensional projectors π
bp,2 along the lines of Ref. 15
(Section 5.1.2). Let Ibd = Ib × · · · × Ib for d ≥ 2. Coordinates in Ibd are written
2
b = (b
as x
x1 , . . . , x
bd ). We introduce the tensor-product Sobolev space Hmix
(Ibd ) :=
Nd
2 b
i=1 H (I). Notice that, for d = 3, we have the inclusion
2
H 6 (Ib3 ) ⊂ Hmix
(Ib3 ).
(4.1)
N
b On Ibd and for p ≥ 3, we now define the tensorized
We set Qp (Ibd ) := di=1 Pp (I).
interpolation operator
d
π
bp,2
(i)
=
d
O
i=1
(i)
π
bp,2 ,
(4.2)
where π
bp,2 denotes the univariate projector defined in Lemma 4.1, acting in the vari2
(Ibd ); see Ref. 15 (Proposiable x
bi . The projector is well-defined and stable on Hmix
tion 5.3). For corresponding hp-approximation results, we refer to Ref. 15 (Proposition 5.4).
d
, a crucial role is taken by the
In the discussion of interelement continuity of πk,2
following property. It implies that traces of the tensorized interpolant and tensor
projection commute. It is an immediate consequence of (4.2) and of the defining
properties of the univariate projector in Lemma 4.1.
Proposition 4.1. For d ≥ 2 and 1 ≤ j ≤ d, there holds
O
(i)
d
π
bp,2
v |xbj =±1 =
bj = ±1)).
π
bp,2 (v(·, x
(4.3)
1≤i6=j≤d
Remark 4.1. Observe that (4.3) is recursive: one may take repeated traces with
0
0
respect to a sequence {b
xj(k) }k≥1 of coordinates, with j(k)
6= j(k ) for k 6= k. In
3
particular, by taking the traces twice, we see that π
bp,2 v |xbi =±1,bxj =±1 corresponds
to the univariate projections π
bp,2 of traces of v onto polynomials on all edges {b
xi =
±1} ∩ {b
xj = ±1}, for i 6= j. Iterating this argument d times, we obtain nodal
exactness of π
b d v in the vertices of Ibd follows: for v ∈ H 2 (Ibd ) ⊂ C 0 (Ibd ), we have
p,2
mix
d
v(Q) = (b
πp,2
v)(Q) for all vertices Q of Ibd .
(4.4)
April 26, 2016 8:4 WSPC/INSTRUCTION FILE
paper
hp-CGFEM for Elliptic Problems in Polyhedra
15
4.2. Continuity properties
For an axiparallel hexahedron K and for a function v : K → R with vb = v ◦ ΦK ∈
2
3
b we now define the elemental interpolant (πp,2
Hmix
(K),
v)|K ∈ Qp (K) in a standard
way by setting
3
3
πp,2
v |K ◦ ΦK := π
bp,2
v ◦ ΦK ,
(4.5)
3
b → K the
with π
bp,2
the reference tensor interpolant (4.2) (for d = 3) and ΦK : K
(i)
elemental mapping. Analogously, we denote by πp,2 |K the univariate projector π
bp,2
applied in direction xi on element K.
The following lemma is a straightforward consequence of (4.4) and Remark 4.1,
taking into account the inclusion (4.1).
Lemma 4.2. Let K, K 0 be two axiparallel hexahedra, F = FK,K 0 a regularly matching face and v ∈ H 6 (int(K ∪ K 0 )). Then we have
3
3
|K 0 v|K 0 |F ,
(4.6)
πp,2
|K v|K |F = πp,2
3
implying that the projector πp,2
yields a piecewise polynomial approximation which
is continuous across the regular face F .
Similarly, let K be an axiparallel hexahedron, F ∈ FK and v ∈ H 6 (K). If there
holds v|F ≡ 0, then we have
3
(4.7)
|K v|K |F ≡ 0,
πp,2
3
implying that the projector πp,2
preserves homogeneous Dirichlet boundary conditions on the face F . Additionally, if E ⊂ F is an elemental edge of K (i.e., E ∈ E K ),
then identity (4.7) implies
3
(4.8)
πp,2
|K v|K |F |E ≡ 0 .
4.3. Definition of the base projectors
Analogously to (3.4), we split the geometrically refined reference mesh patches into
e
interior elements and terminal layer elements, with respect to the singular set on Q
induced via the patch maps by the corresponding singular corners and edges on Ω:
e `,t . e `,t
f`,t
M
σ := Oσ ∪ Tσ ,
t ∈ {c, e, ce}.
(4.9)
e → R and the polynomial degree p` in (3.11), we define the
For a function u
e: Q
non-conforming reference base interpolant π
eb`,t u
e elementwise as
3
e ∈M
fσ`,int ,
e|Ke
t = int and K
πp` ,2 |Ke u
e `,t ,
e ∈O
πb`,t |K
e|Ke :=
(4.10)
πp3` ,2 |Ke u
e|Ke
t ∈ {c, e, ce} and K
eu
σ
0
`,t
e
e ∈T .
t ∈ {c, e, ce} and K
σ
This interpolant is equal to the tensorized interpolant
πp3` ,2 |K
e
in (4.5) on all axie is
parallel hexahedral elements whose distance to the singular support of ũ in Q
April 26, 2016 8:4 WSPC/INSTRUCTION FILE
16
paper
Dominik Schötzau and Christoph Schwab
positive, and equal to zero on all terminal layer elements (in the respective reference patches). Due to the inclusion (4.1), the base interpolants are well-defined for
e with weighting according to the patch type
functions in the Sobolev space Mt6 (Q)
t ∈ {c, e, ce, int}.
Remark 4.2. In view of Lemma 4.2, the base interpolants π
eb`,t u
e in (4.10) are
f`,t
conforming over regularly matching faces within the reference mesh patch M
σ and
satisfy homogeneous boundary conditions on patch faces corresponding to boundary
faces of a geometric mesh M on Ω. However, π
eb`,t u
e is generally discontinuous over
irregular faces within a reference mesh patch, as well as at the boundary of the
terminal layers.
4.4. Exponential convergence on reference mesh patches
Next, we review from Ref. 15 the patchwise exponential convergence results in (3.24)
for the reference base projectors in (4.10) and for solutions u with patchwise analytic
e for t ∈ {c, e, ce, int}.
regularity for the pull-back u
e, i.e., u
e ∈ At (Q)
`,int
f
First, interior patches Mp = Gp (Mσ ) consist of a fixed regular collection of
axiparallel, hexahedral elements whose distances to the singular set S are bounded
e associated
away from zero. Hence, the analytic regularity reference class Aint (Q)
`,int
e
with Mσ consists of functions u
e which are analytic in Q with
|e
u|2M k
e
int (Q)
2(k+1)
:= |e
u|2H k (Q)
Γ(k + 1)2 ,
e ≤C
k ∈ N0 .
(4.11)
By proceeding as in Ref. 15 (Proposition 5.10), we obtain the following exponential
bound.
Proposition 4.2. Let u
e satisfy the regularity assumption (4.11). Consider the base
projector π
eb`,int u
e in (4.10) with polynomial degrees p` ' ` as in (3.11). Then, as
` → ∞, we have the error bound
ΥM
[e
u−π
eb`,int u
e] ≤ C exp(−2b`) ,
f`,int
σ
with constants b, C > 0 independent of `.
f`,c on Q,
e the analytic reference
Second, for the reference corner mesh patch M
σ
e can be assumed to consist of functions u
class Ac (Q)
e that satisfy
X
2(k+1)
e αu
|e
u|2M k (Q)
krc−1−bc +|α| D
ek2L2 (Q)
Γ(k + 1)2 ,
k ∈ N0 , (4.12)
e :=
e ≤C
c
|α|=k
e cp. Figure 1 (left), and bc ∈ (0, 1) a corner
where rc is the distance to a corner of Q,
weight exponent as in (2.12).
Proposition 4.3. Let u
e satisfy the regularity assumption (4.12). Consider the base
projector π
eb`,c u
e in (4.10) with polynomial degrees p` ' ` as in (3.11). Then, as
` → ∞, we have the error bound
[e
u−π
eb`,c u
e] ≤ C exp(−2b`) ,
ΥM
f`,c
σ
April 26, 2016 8:4 WSPC/INSTRUCTION FILE
paper
hp-CGFEM for Elliptic Problems in Polyhedra
17
with constants b, C > 0 independent of `.
f`,c = O
e `,c ∪. T
e `,c . On O
e `,c , exponential convergence
Proof. From (4.9), we have M
σ
σ
σ
σ
e `,c , the exponential bound
follows from Ref. 15 (Proposition 5.13). On the mesh T
σ
results from Ref. 15 (Proposition 5.21).
f`,e on Q,
e we analogously shall conThird, for the reference edge mesh patch M
σ
e
sider the analytic reference class Ae (Q) of functions u
e so that
X
⊥
2(k+1)
e αu
kre−1−be +|α | D
ek2L2 (Q)
Γ(k + 1)2 ,
k ∈ N0 , (4.13)
|e
u|2M k (Q)
e ≤C
e :=
e
|α|=k
e as indicated in boldface in Figure 1
where re is the distance to an edge of Q,
(middle), and be ∈ (0, 1) an edge weight exponent as in (2.12).
Proposition 4.4. Let u
e satisfy the regularity assumption (4.13). Consider the base
projector π
eb`,e u
e in (4.10) with polynomial degrees p` ' ` as in (3.11). Then, as
` → ∞, we have the error bound
ΥM
[e
u−π
eb`,e u
e] ≤ C exp(−2b`) .
f`,e
σ
with constants b, C > 0 independent of `.
Proof. This is a consequence of Ref. 15 (Proposition 5.15) and Ref. 15 (Proposition 5.22).
f`,ce
e By superFinally, we consider the reference corner-edge mesh patch M
on Q.
σ
position as in Ref. 15, we may restrict ourselves to the case of single corner c with
e now consists
a single edge e ∈ Ec . The associated analytic reference class Ace (Q)
of functions u
e satisfying
X
⊥
2(k+1)
e +|α | e α
|e
u|2M k (Q)
krc−1−bc +|α| ρ−1−b
D u
ek2L2 (Q)
Γ(k + 1)2 , (4.14)
e :=
ce
e ≤C
ce
|α|=k
e
for any k ∈ N0 , where rc and ρce are the distances to the corner-edge pair on Q
formed by c and e, as indicated in Figure 1 (right). The weight exponents bc , be ∈
(0, 1) are as in (2.12).
Proposition 4.5. Let u
e satisfy the regularity assumption (4.14). Consider the base
projector π
eb`,ce u
e in (4.10) with polynomial degrees p` ' ` as in (3.11). Then, as
` → ∞, we have the error bound
ΥM
[e
u−π
eb`,ce u
e] ≤ C exp(−2b`) ,
f`,ce
σ
with constants b, C > 0 independent of `.
Proof. This bound follows from Ref. 15 (Proposition 5.17) and Ref. 15 (Proposition 5.23).
April 26, 2016 8:4 WSPC/INSTRUCTION FILE
18
paper
Dominik Schötzau and Christoph Schwab
5. Polynomial Trace Liftings
e `,t =
In this section, we construct the H 1 -conforming reference patch projectors Π
`,t
`,t
e
π
eb + Lt in (3.16), (3.25), by modifying the base projectors π
eb with the introduction of suitable polynomial trace liftings Let over irregular edges and/or irregular faces. We then prove the bound (3.26) in Proposition 3.1 separately for each
reference mesh patch. To that end, we simply write πb := π
eb`,t for the base hp`,t
f , t ∈ {c, e, ce, int},
projector in (4.10) on the respective reference mesh patch M
σ
e `,t for the resulting patch projector. When clear from the context, we
and Π := Π
will omit ”tildas” to denote quantities on reference patches, and use the notation
η = u − Πu,
ηb = u − πb u,
(5.1)
e for t ∈
for a generic patch function u in the weighted space u ∈ Mt6 (Q)
{c, e, ce, int}; cp. inclusion (4.1).
f`,int
5.1. Interior patch M
σ
fσ`,int , we take
For the interior reference mesh patch M
fσ`,int
M
f`,int ,
Πu := πb u on M
σ
(5.2)
Since
contains finitely many regular refinements, Πu in (5.2) yields a confσ`,int , cp. Lemma 4.2
forming piecewise polynomial approximation over the patch M
and Assumptions 3.1, 3.2. No further liftings are required, and the bound (3.26)
fσ`,int , without any loss in p.
hold trivially for M
Proposition 5.1. With (5.1) we have ΥM
[η] . ΥM
[ηb ].
f`,int
f`,int
σ
σ
f`,e
5.2. Edge patch M
σ
f`,e
Next, we analyze the reference edge patch M
σ , where irregular faces arise across
layers due to irregular geometric refinements perpendicular to edges, as illustrated
in Figure 1 (middle). As the edge-patch analysis will be a building block also for
f`,e
the corner-edge case, we consider here a more general edge patch M
σ whose edgek
parallel size is determined by the parameter h (not necessarily of order one). Our
f`,e
estimates will then be made explicit in hk . According to (4.9), we write M
σ =
.
`,e
`,e
e ∪T
e and consider the two submeshes separately.
O
σ
σ
e `,e
5.2.1. Interior elements in O
σ
e `,e can be partitioned into ` layers as O
e `,e =
By (3.5), the interior mesh O
σ
σ
S`−1 e `0 ,e
`0 =0 Lσ . By Lemma 4.2 and Remark 4.2, the base projector πb u is continuous over elements within each layer `0 , and satisfies the homogeneous boundary
conditions on appropriate patch boundary faces. For 1 ≤ `0 ≤ ` − 1, we thus
need to introduce trace liftings on the interface of the two adjacent mesh laye `0 ,e = {K 0 , K 0 , K 0 } as illustrated in Figure 2.
e `0 −1,e = {K1 , K2 , K3 } and L
ers L
3
2
1
σ
σ
f24
F1
F2
F3
April 26, 2016 8:4 WSPC/INSTRUCTION FILE
E4
E5
E6
E7
E8
E9
N1
N2
N3
N4
N5
N6
N7
1
2
3
···
`
`0
e `,c
T
σ
e `,c,⊥
O
σ
paper
hp-CGFEM for Elliptic Problems in Polyhedra
19
x⊥
2
xk
E3
b⊥
2
K3
hk
K30
f33
b⊥
1
E1
K10
f31
K20
f21 a⊥
1 f22
K1
E2
x⊥
1
a⊥
2
K2
0
0
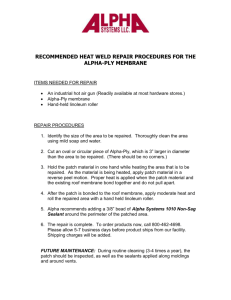
e `σ ,e = {K 0 , K 0 , K 0 } for σ = 0.5
e `σ −1,e = {K1 , K2 , K3 } and L
Fig. 2. Interface between layers L
3
2
1
⊥ , b⊥ , b⊥ . The irregular faces f , f , f , f
,
a
and length parameters hk , a⊥
21 22 31 33 are indicated.
2
1
2
1
In the
system there, the singular edge e on the patch corresponds to
coordinate
⊥
k
⊥
⊥
⊥
k
k
k
k
e = x = (x , x ) : x⊥
1 = a2 , x2 = b2 , x ∈ e , with e := (0, h ). As in (3.6),
k
⊥
0
we write the elements Ki , Ki in the product form Ki = Ki ×e and Ki0 = (Ki0 )⊥ ×ek ,
respectively, where Ki⊥ and (Ki0 )⊥ are shape-regular and axiparallel rectangles of
diameters diam(Ki⊥ ) ' h⊥ , with h⊥ . hk . We introduce the faces fij := fKi ,Kj0 , and
note that f21 , f22 , f31 , f33 are irregular; cp. Figure 2. We further set fij0 := fKi0 ,Kj ,
0
0
and observe that f12
and f13
match regularly. As indicated in Figure 2, the precise
locations of the elements, faces and edges in each layer are determined by the length
⊥
⊥ ⊥
parameters a⊥
1 , a2 and b1 , b2 , which do not change from layer to layer. Finally, we
⊥
⊥
note that h⊥
min,Ki ' hmin,Ki0 ' h . We then consider the polynomial face jumps
[[πb u]]fij = [[πb u]]fK ,K 0 = πb |Ki u|Ki − πb |Kj0 u|Kj0 |fij .
(5.3)
i
j
Similarly, we denote the jumps across fij0 by [[πb u]]fij0 := [[πb u]]fK 0 ,K 0 .
i
j
Remark 5.1. The jumps (5.3) have a natural tensor-product structure. To describe
k
it, we write fij := e⊥
ij × e . The tensor-product definitions (4.2), (4.5) imply the
k
(1)
(2)
representation πb |K = πb⊥ |K ⊗πb |K , with πb⊥ |K = πp,2 |K ⊗πp,2 |K the tensor-product
projector acting in the first two coordinate directions and considered already in
k
(3)
Ref. 16 (Theorem 4.72), and with πb |K denoting the univariate projector πp,2 |K
acting in edge-parallel direction. It can be readily seen that
k
[[πb u]]fij = [[πb⊥ u]]e⊥
⊗ πb ,
ij
k
on fij = e⊥
ij × e ,
(5.4)
denoting two-dimensional jumps in direction perpendicular to the
with [[πb⊥ u]]e⊥
ij
edge e on the slice xk ∈ ek . (The jumps [[πb u]]fij0 have an analogous structure.)
April 26, 2016 8:4 WSPC/INSTRUCTION FILE
20
paper
Dominik Schötzau and Christoph Schwab
We also point out that, for xk = 0 (and analogously for xk = hk ), the nodal
k
exactness property of the univariate projector πb in Lemma 4.1 implies
(πb u)(x⊥ , 0) = (πb⊥ u(·, 0))(x⊥ ),
⊥
⊥
0 ⊥ 3
x⊥ = (x⊥
1 , x2 ) ∈ {Ki ∪ (Ki ) }i=1 .
(5.5)
In conjunction with Assumptions 3.1, 3.2, property (5.5) implies the conformity of
the base projections πb u in edge-parallel direction over (the corresponding mesh
layers of) different edge patches across xk = 0 (or xk = hk ); see also the discussion
in Remark 4.2.
The next lemma records several other results for the polynomial jumps (5.3).
⊥
k
k
To state them, we introduce the elemental edges E1 = {x⊥
1 = 0, x2 = 0, x ∈ e },
⊥
⊥
⊥
k
k
⊥
⊥
⊥ k
k
E2 = {x1 = a2 , x2 = 0, x ∈ e } and E3 = {x1 = 0, x2 = b2 , x ∈ e } as depicted
in Figure 2.
⊥
Lemma 5.1. The jumps [[πb u]]f21 , [[πb u]]f22 are continuous across x⊥
1 = a1 , while
⊥
⊥
the jumps [[πb u]]f31 , [[πb u]]f31 are continuous across x2 = b1 . In addition, for the
elemental edges E1 , E2 , E3 in Figure 2, there holds
[[πb u]]f21 ≡ 0 on E 1 ,
[[πb u]]f22 ≡ 0 on E 2 ,
[[πb u]]f31 ≡ 0 on E 1 ,
(5.6)
[[πb u]]f33 ≡ 0 on E 3 .
(5.7)
k
⊥
Proof. Let x = (a⊥
1 , 0, x ). By (5.3) and since f21 and
f22 lie on x2 = 0,
we conclude that [[πb u]]f21 (x) = πb |K2 u|K2 − πb |K10 u|K10 (x), and [[πb u]]f22 (x) =
0
, propπb |K2 u|K2 − πb |K20 u|K20 (x). Since K10 and K20 match regularly over f12
erty (4.6) in Lemma 4.2 implies πb |K10 u|K10 (x) = πb |K20 u|K20 (x), which shows the
⊥
continuity of [[πb u]]f21 and [[πb u]]f22 at x⊥
1 = a1 . The continuity of [[πb u]]f31 and
⊥
[[πb u]]f32 at x2 is proved in an analogous manner.
To establish (5.6), (5.7), we consider exemplarily the edge E 1 ⊂ f 21 (the proof
of the other cases is analogous). By using the tensor-structure (5.4) and the nodal
exactness property (4.4) (for the perpendicular tensor projector πb⊥ ), we see that,
k
k
for x = (0, 0, xk ), we have [[πb u]]f21 (x) = [[πb⊥ u]]e⊥
⊗ πb (x) = [[πb u]]f21 (x) = 0,
21
which finishes the proof.
The structure (5.4) of the polynomial jumps (5.3) motivates
the following lifting operator:
⊥
⊥
⊥
[[πb u]]f21 (1 − x⊥
2 /b1 ) + [[πb u]]f31 (1 − x1 /a1 )
[[π u]] (1 − x⊥ /b⊥ )
b f22
2
1
Le [πb u] :=
⊥
⊥
(1
−
x
/a
[[π
u]]
b
f
33
1
1)
0
the introduction of
on K10 ,
on K20 ,
on K30 ,
(5.8)
on {Ki }3i=1 .
Obviously, Le [πb u]|Ki0 ∈ Qp (Ki0 ) for i = 1, 2, 3.
Lemma 5.2. The lifting Le [πb u] belongs to C 0 (K10 ∪ K20 ∪ K30 ). It vanishes on the
⊥
0
⊥
⊥
0
⊥
⊥
0
⊥
⊥
sets ∂K20 ∩ {x⊥
1 = a2 }, ∂K2 ∩ {x2 = b1 }, ∂K3 ∩ {x1 = a1 } and ∂K3 ∩ {x2 = b2 },
April 26, 2016 8:4 WSPC/INSTRUCTION FILE
paper
hp-CGFEM for Elliptic Problems in Polyhedra
21
implying that its support does not extend into layer `0 + 1 and beyond the patch
borders within layer `0 . Moreover, we have
Le [πb u]|K10 |f21 = [[πb u]]f21 ,
Le [πb u]|K20 |f22 = [[πb u]]f22 ,
Le [πb u]|K10 |f31 = [[πb u]]f31 ,
Le [πb u]|K30 |f33 = [[πb u]]f33 .
(5.9)
(5.10)
Proof. The continuity of Le [πb u] over K10 ∪ K20 ∪ K30 follows readily from the
construction of the lifting and Lemma 5.1.
From the definition (5.8) it follows further that the lifting vanishes on the
⊥
0
⊥
⊥
sets ∂K20 ∩ {x⊥
2 = b1 } and ∂K3 ∩ {x1 = a1 }. Next, we consider the boundary
⊥
⊥
set ∂K20 ∩ {x⊥
1 = a2 }. By property (5.7) and since f22 lies on x2 = 0, there holds
⊥
k
0
⊥
[[πb u]]f22 (a2 , 0, x ) = 0. Hence, the lifting also vanishes on ∂K2 ∩ {x⊥
1 = a2 }. The
0
⊥
⊥
proof for the set ∂K3 ∩ {x2 = b2 } is analogous.
Finally, we verify the first identity in (5.9) for the face f 21 ⊂ ∂K10 ; the other
identities are established analogously. There holds
k
⊥
k
k
⊥
⊥
Le [πb u]|K10 (x⊥
1 , 0, x ) = [[πb u]]f21 (x1 , 0, x ) + [[πb u]]f31 (0, 0, x )(1 − x1 /a1 ) .
With (5.6), we have [[πb u]]f31 (0, 0, xk ) = 0. Hence, Le [πb u]|K10 |f21 = [[πb u]]f21 .
k
⊥
⊥
Remark 5.2. From (5.4), we have Le [πb u] = L⊥
e⊥ [πb u]⊗πb , where Le⊥ is (a slight
modification of) the two-dimensional polynomial trace lifting operator introduced
in Ref. 16 (Theorem 4.72) in the slice at xk ∈ ek in edge-perpendicular direction; cp.
Figure 2. Hence, for xk = 0 (and analogously for xk = hk ), property (5.5) implies
⊥
⊥
Le [πb u](x⊥ , 0) = (L⊥
e⊥ [πb u(·, 0)])(x ) ,
x⊥ ∈ (Ki0 )⊥ , i = 1, 2, 3 .
(5.11)
The lifting Le [πb u] does not generally vanish at the edge-perpendicular patch borders situated on xk = 0 or xk = hk . However, under Assumptions 3.1, 3.2 and upon
introducing corresponding liftings in the adjacent edge or corner-edge patches, the
tensor-product structure of the base projectors and liftings in (5.5) and (5.11),
respectively, guarantee the conformity of the patch projectors Le [πb u] over the corresponding mesh layers of different edge patches on the edge-perpendicular patch
interfaces xk = 0 or xk = hk .
Lemma 5.2 and the definition of the jumps (5.3) imply that the lifted projector
Πu := πb u + Le [πb u] gives a continuous and piecewise polynomial approximation
over mesh layers `0 − 1 and `0 , which does not affect the base projection πb u at
the interface to the next layer `0 + 1. In view of Lemma 5.2 and property (4.7),
Πu satisfies homogeneous Dirichlet boundary conditions which might possibly arise
⊥
0
⊥
⊥
within layer `0 on ∂K20 ∩ {x⊥
1 = a2 } or ∂K3 ∩ {x2 = b2 }.
As we show next, the jump lifting Le [πb u] is stable and the (weighted) H 1 -norm
of η = u − Πu can be controlled in terms of ηb = u − πb u.
April 26, 2016 8:4 WSPC/INSTRUCTION FILE
22
paper
Dominik Schötzau and Christoph Schwab
Lemma 5.3. We have the bounds
NK10 [Le [πb u]]2 . p4 (h⊥ )−1 k[[πb u]]f21 k2L2 (f21 ) + k[[πb u]]f31 k2L2 (f31 ) ,
NK20 [Le [πb u]]2 . p4 (h⊥ )−1 k[[πb u]]f22 k2L2 (f22 ) ,
(5.12)
NK30 [Le [πb u]]2 . p4 (h⊥ )−1 k[[πb u]]f33 k2L2 (f33 ) ,
and
3
X
i=1
3
X
NKi [ηb ]2 + NKi0 [ηb ]2 .
NKi [η]2 + NKi0 [η]2 . p4
(5.13)
i=1
Proof. We only prove (5.12) for K10 (the other bounds are analogous). To do so,
we first assume that the configuration is of unit size, i.e., h⊥ ' hk ' O(1). Then,
by definition of Le [πb u] in (5.8), it readily follows that
kLe [πb u]k2L2 (K10 ) . k[[πb u]]f21 k2L2 (f21 ) + k[[πb u]]f31 k2L2 (f31 ) .
From the inverse inequality in Ref. 16 (Theorem 3.91), we find that
4
2
k∇vk2L2 (K)
b . p kvkL2 (K)
b
Hence,
b .
∀ v ∈ Qp (K)
(5.14)
k∇Le [πb u]k2L2 (K10 ) . p4 k[[πb u]]f21 k2L2 (f21 ) + k[[πb u]]f31 k2L2 (f31 ) .
In the general case as shown in Figure 2, we use the bounds above in conjunction
with the anisotropic scalings in Lemma 3.1, exploiting the assumption h⊥ . hk . 1.
This results in
(5.15)
kLe [πb u]k2L2 (K10 ) . h⊥ k[[πb u]]f21 k2L2 (f21 ) + k[[πb u]]f31 k2L2 (f31 ) ,
(5.16)
k∇Le [πb u]k2L2 (K10 ) . p4 (h⊥ )−1 k[[πb u]]f21 k2L2 (f21 ) + k[[πb u]]f31 k2L2 (f31 ) .
⊥
From these bounds and since h⊥
min,K 0 ' h , we conclude that
1
2
4
⊥ −1
NK10 [Le [πb u]] . p (h )
k[[πb u]]f21 k2L2 (f21 ) + k[[πb u]]f31 k2L2 (f31 ) ,
which proves the bound (5.12) for K10 .
To establish (5.13), we note that, with the triangle inequality,
3
X
i=1
3
X
NKi [ηb ]2 + NKi0 [ηb ]2 + NKi0 [Le [πb u]]2 .
NKi [η]2 + NKi0 [η]2 .
i=1
We next estimate the term NK20 [Le [πb u]]2 . From (5.12) and (3.9) (with the fact that
[[πb u]]f22 = [[ηb ]]f22 ), we see that
NK20 [Le [πb u]]2 ≤ p4 (h⊥ )−1 k[[πb u]]f22 k2L2 (f22 ) . p4 NK2 [ηb ]2 + NK20 [ηb ]2 .
Similar bounds for NK10 [Le [πb u]] and NK30 [Le [πb u]] yield the assertion.
6
K7000
K10000
f22
April 26, 2016 8:4 WSPC/INSTRUCTION FILE
f33
f76
f77
f23
f24
F1
F2
F3
paper
hp-CGFEM for Elliptic Problems in Polyhedra
23
e `,e
5.2.2. Terminal layer elements in T
σ
e `,e to T
e `,e illustrated in Figure 3. We use the
We next consider the interface from O
σ
σ
e
same notations as in Section 5.2.1. The set Lσ`−1,e = {K1 , K2 , K3 } forms layer ` − 1
0
4
e `,e , and T
eE`,e
of O
σ
σ = {K1 } is the terminal layer. The base projector πb u is set to
E5
0
zero in K1 as per (4.10). Thus, even though the faces f21 and f31 are now regularly
E6
matching, the jumps
[[πb u]]f21 and [[πb u]]f31 do not vanish in general. In addition,
E7
the key properties (5.6), (5.7) are not valid anymore. On the other hand, due to
E8
Assumptions 3.1,
3.2, the base projectors πb u are continuous in parallel direction
E9
over (the corresponding
mesh layers of) different edge patches across xk = 0 or
N1
k
k
x = h ; cp. Remark 5.1 and the definition of the base projectors in (4.10). To
N2
N3
N4
N5
N6
N7
x⊥
2
b⊥
1
1
2
K3 f31
3
···
`
`0
e `,c
T
σ
K1
e `,c,⊥
O
σ
xk
E3
hk
E1
K10
f21
a⊥
1
E2
x⊥
1
K2
0
e `−1,e
e `,e
Fig. 3. Interface between mesh layer L
= {K1 , K2 , K3 } and the terminal layer T
σ
σ = {K1 }
⊥
k
⊥
for σ = 0.5 and length parameters h , a1 , b1 . The faces f21 , f31 and the edges E1 , E2 , E3 are
indicated.
overcome the above-mentioned difficulties, we modify the lifting procedure in (5.8)
by introducing suitable edge liftings associated with the edges E1 , E2 , E3 shown in
Figure 3. We detail this for edge E1 .
Lemma 5.4. We have [[πb u]]f21 = [[πb u]]f31 on E 1 . Analogous identities hold on E2
and E3 (across patch borders).
Proof. Let x ∈ E 1 . Then, since πb u = 0 on K10 , we have [[πb u]]f21 (x) =
πb |K2 u|K2 (x) and [[πb u]]f31 (x) = πb |K3 u|K3 (x). Since the elements K1 , K2 , K3 in
layer ` − 1 match regularly, property (4.6) implies πb |K2 u|K2 (x) = πb |K3 u|K3 (x),
which proves the assertion.
With Lemma 5.4, we set [[πb u]]E1 := [[πb u]]f21 |E1 = [[πb u]]f31 |E1 , and introduce
April 26, 2016 8:4 WSPC/INSTRUCTION FILE
24
paper
Dominik Schötzau and Christoph Schwab
the edge jump lifting
(
1
LE
e [πb u] :=
⊥
⊥ ⊥
[[πb u]]E1 (1 − x⊥
1 /a2 )(1 − x2 /b1 )
0
on K10 ,
on {Ki }3i=1 .
(5.17)
Clearly, LeE1 [πb u] ∈ Qp (K10 ). Furthermore, the lifting vanishes on the elemental
⊥
0
⊥
⊥
faces ∂K10 ∩ {x⊥
1 = a1 } and ∂K1 ∩ {x2 = b1 }; cp. Figure 3.
k
⊥
E1
1
Remark 5.3. The lifting LE
e has the tensor-product structure Le = LN ⊗ πb ,
where the lifting L⊥
N is a two-dimensional nodal lifting in edge-perpendicular direc0 ⊥
tion into (K1 ) on the slice xk ∈ ek with N = (0, 0, xk ).
Lemma 5.5. We have the bounds
2
6 ⊥ −1
1
NK10 [LE
k[[πb u]]f21 k2L2 (f21 ) ,
e [πb u]] . p (h )
2
6 ⊥ −1
1
NK10 [LE
k[[πb u]]f31 k2L2 (f31 ) ,
e [πb u]] . p (h )
and
2
2
2
6
1
NK10 [LE
e [πb u]] . p NK2 [ηb ] + NK10 [ηb ] ,
2
2
2
6
1
NK10 [LE
e [πb u]] . p NK3 [ηb ] + NK10 [ηb ] .
(5.18)
(5.19)
Proof. We establish the bounds associated with face f21 ; the proof of the other
ones is analogous. If the configuration in Figure 3 is of unit size, the two-dimensional
polynomial trace inequality in Ref. 16 (Theorem 4.76) yields
k[[πb u]]E1 k2L2 (E1 ) . p2 k[[πb u]]f21 k2L2 (f21 ) ,
(5.20)
since [[πb u]]E1 = [[πb u]]f21 |E1 . With this estimate, it readily follows that
2
2
2
2
1
kLE
e [πb u]kL2 (K10 ) . k[[πb u]]E1 kL2 (E1 ) . p k[[πb u]]f21 kL2 (f21 ) .
As before, the inverse inequality (5.14) implies
2
2
6
1
k∇LE
e [πb u]kL2 (K10 ) . p k[[πb u]]f21 kL2 (f21 ) .
This implies (5.18) in the reference case. In the general case, we apply the scalings
in Lemma 3.1, cp. (5.15) and (5.16), and obtain the first bound in (5.18).
This bound, the jump estimate (3.9) (with the fact that [[u]]f21 = 0) and the
triangle inequality yield
2
2
2
6
1
NK10 [LE
e [πb u]] . p NK2 [ηb ] + NK10 [ηb ] .
This shows the first estimate in (5.19).
Next, we define the full edge lifting
LE
e [πb u] =
3
X
j=1
E
Le j [πb u],
(5.21)
E3
2
where LE
e [πb u], Le [πb u] are edge liftings associated with the edges E2 , E3 in Figure 3 and defined analogously to (5.17). If the elemental edge E2 or E3 corresponds
April 26, 2016 8:4 WSPC/INSTRUCTION FILE
paper
hp-CGFEM for Elliptic Problems in Polyhedra
25
to a boundary edge, the resulting edge lifting is identically zero, in accordance with
property (4.8) for element K2 or K3 . From stability bounds analogous to (5.18), we
conclude that
2
2
6
2
2
NK10 [LE
(5.22)
e [πb u]] . p NK2 [ηb ] + NK3 [ηb ] + NK10 [ηb ] .
Remark 5.4. The introduction of corresponding edge liftings LE
e [πb u] in terminal layer elements of adjacent edge patches readily yields continuity across patch
⊥
borders in x⊥
1 -direction or x2 -direction. In addition, the tensor-product property
in Remark 5.3 ensures the conformity of LE
e [πb u] in terminal layer elements across
k
k
k
x = 0 or x = h over edge or corner-edge patches; cp. Assumptions 3.1, 3.2.
We modify the base projector on K10 and set
(
πb u + L E
on K10 ,
e [πb u]
E
πb u :=
πb u
on {Ki }3i=1 .
(5.23)
By construction, the projector πbE u satisfies properties (5.6), (5.7) in the terminal
layer setting of Figure 3.
Lemma 5.6. There holds:
[[πbE u]]f21 ≡ 0 on E 1 ,
[[πbE u]]f21
≡ 0 on E 2 ,
[[πbE u]]f31 ≡ 0 on E 1 ,
[[πbE u]]f31
≡ 0 on E 3 .
(5.24)
(5.25)
Proof. We verify (5.24) for the face f21 (the proof for the other faces is analogous).
By construction and the definition (5.3) of the jumps, we have, for x ∈ E 1 ,
1
[[πbE u]]f21 (x) = [[πb u]]f21 (x) − LE
e [πb u]|K10 |f21 (x) = [[πb u]]f21 (x) − [[πb u]]f21 (x) = 0.
This yields the assertion.
Next, we adapt the polynomial face jump lifting Le [·] in (5.8) to the configuration
in Figure 3:
(
⊥
E
⊥
⊥
0
[[πbE u]]f21 (1 − x⊥
K10
2 /b1 ) + [[πb u]]f31 (1 − x1 /a1 ) on K1 ,
Le [πb u] :=
(5.26)
0
on {Ki }3i=1 .
K0
⊥
0
With (5.24), (5.25), the lifting Le 1 [πb u] vanishes on ∂K10 ∩ {x⊥
1 = a1 } and ∂K1 ∩
0
K
⊥
1
{x⊥
2 = b1 }; cp. Lemma 5.2. Furthermore, Le [πb u] has a tensor-product structure
similar to (5.11).
Lemma 5.7. There holds
K0
NK10 [Le 1 [πb u]]2 . p10 NK2 [ηb ]2 + NK3 [ηb ]2 + NK10 [ηb ]2 .
Proof. By proceeding as in the proof of (5.12), we see that
K0
NK10 [Le 1 [πb u]]2 . p4 (h⊥ )−1 k[[πbE u]]f21 k2L2 (f21 ) + k[[πbE u]]f31 k2L2 (f31 ) .
(5.27)
April 26, 2016 8:4 WSPC/INSTRUCTION FILE
26
paper
Dominik Schötzau and Christoph Schwab
Then, the jump bound (3.9) (noting that [[u]]f21 = [[u]]f32 = 0), the definition of the
edge lifting and the triangle inequality yield
K0
NK10 [Le 1 [πb u]]2 . p4 NK2 [ηb ]2 + NK3 [ηb ]2 + NK10 [u − πbE u]2
2
. p4 NK2 [ηb ]2 + NK3 [ηb ]2 + NK10 [ηb ]2 + NK10 [LE
.
e [πb u]]
Invoking (5.22) yields (5.27).
In the configuration of Figure 3, we finally introduce the following lifting:
(
K10
LE
on K10 ,
e [πb u] + Le [πb u]
T
(5.28)
Le [πb u] :=
0
on {Ki }3i=1 .
By Remark 5.4, the edge jump liftings LE
e [πb u] in (5.28) give rise to a conforming
K0
function across neighboring patches. The lifting Le 1 [πb u] is piecewise polynomial
⊥
0
⊥
⊥
and vanishes at the patch borders ∂K10 ∩ {x⊥
1 = a1 } and ∂K1 ∩ {x2 = b1 }. Hence,
it preserves essential boundary data which possibly arise on these patch faces.
k
k
k
Remark 5.5. The lifting LT
e [πb u] does not generally vanish on x = 0 or x = h .
E
However, as in Section 5.2.1, the tensor-product structure of the liftings Le [πb u] and
K0
k
Le 1 [πb u] ensures the continuity of LT
e [πb u] in terminal layer elements across x = 0
k
k
or x = h ; cp. Assumptions 3.1, 3.2 and the nodal exactness of the univariate
k
projector πb in edge-parallel direction in Lemma 4.1.
Lemma 5.8. There holds:
LT
e [πb u]|K10 |f21 = [[πb u]]f21 ,
LT
e [πb u]|K10 |f31 = [[πb u]]f31 .
(5.29)
Proof. We show (5.29) for f21 (the proof for f31 is analogous). By (5.24) and as in
K0
the proof of (5.9), we have Le 1 [πb u]|K10 |f21 = [[πbE u]]f21 . Hence, with the definition
of πbE u and the jumps in (5.23) and (5.3), respectively, we conclude that
E
E
LT
e [πb u]|K10 |f21 = Le [πb u]|K10 |f21 + [[πb u]]f21 − Le [πb u]|K10 |f21 = [[πb u]]f21 ,
which gives the assertion.
In view of Remark 5.5 and Lemma 5.8, the lifted projector Πu := πb u + LT
e [πb u]
yields a piecewise polynomial and conforming approximation in the setting of Figure 3. The analog of the bound (5.13) in Lemma 5.3 reads as follows.
Lemma 5.9. We have the bound
3
X
i=1
NKi [η]2 + NK10 [η]2 . p10
3
X
i=1
NKi [ηb ]2 + NK10 [ηb ]2 .
(5.30)
April 26, 2016 8:4 WSPC/INSTRUCTION FILE
paper
hp-CGFEM for Elliptic Problems in Polyhedra
27
Proof. The triangle inequality yields
3
X
NKi [η]2 + NK10 [η]2
i=1
.
3
X
K0
2
2
1
NKi [ηb ]2 + NK10 [ηb ]2 + NK10 [LE
e [πb u]] + NK10 [Le [πb u]] .
i=1
Referring to (5.22) and Lemma 5.7 completes the proof.
e `,e ) and Lemma 5.9 (for submesh T
e `,e ) show the
Lemma 5.3 (for submesh O
σ
σ
`,e
f .
bound (3.26) over the reference edge patch M
σ
Proposition 5.2. With (5.1) we have ΥM
[η] . p10 ΥM
[ηb ].
f`,e
f`,e
σ
σ
f`,c
5.3. Corner patch M
σ
f`,c
We consider the reference corner patch M
σ , where irregular faces appear due to
hanging nodes located in the interior of faces, cp. Figure 1 (left). We proceed as
e `,c . e `,c
f`,c
in Section 5.2, by writing M
σ = Oσ ∪ Tσ , cp. (4.9), and by analyzing the two
submeshes separately.
e `,c
5.3.1. Interior elements in O
σ
e `,c into ` layers: O
e `,c =∪. `−1
e `0 ,c
As in the edge patch case, we partition O
σ
σ
`0 =0 Lσ ; cp. (3.5).
For 1 ≤ `0 ≤ ` − 1, we consider the interface of the two adjacent mesh layers
e `0 ,c = {K 0 }7 shown in Figure 4.
e `0 −1,c = {Ki }7 and L
L
σ
σ
i i=1
i=1
All elements involved are shape-regular (uniformly in `) and we may assume
⊥
hKi ' hKi0 ' h⊥
min,Ki ' hmin,Ki0 ' h,
1 ≤ i ≤ 7,
(5.31)
for a mesh size parameter h. As in Section 5.2, we introduce the faces fij = fKi ,Kj0
and fij0 = fKi0 ,Kj0 . The faces f21 , f22 , f76 , f77 are indicated in Figure 4. The locations
of the elements, faces and edges in this configuration are determined by the length
parameters a1 , a2 in x1 -direction, by b1 , b2 in x2 -direction, and by c1 , c2 in x3 direction, respectively. Again, these values do not change from layer to layer. By
Remark 4.2, the base projector πb u defined in (4.10) is continuous across elements
Ki , Kj within layer `0 − 1, respectively across the faces fij0 within layer `0 , and
satisfies possible homogeneous Dirichlet boundary conditions on patch boundary
faces. The polynomial face jumps [[πb u]]fij are defined as in (5.3).
As further illustrated in Figure 5, there are three faces which constitute the
interface between layer `0 − 1 and `0 : F1 := ∂K2 ∩ { x2 = 0 }, F2 := ∂K7 ∩ { x3 = 0 },
and F3 := ∂K5 ∩ { x1 = 0 }. The elemental edges of these faces are denoted by
E1 , . . . , E9 and are also depicted in Figure 5.
We define the polynomial jump across face F1 by
[[πb u]]F1 := [[πb u]]f2j
on f2j , 1 ≤ j ≤ 4.
(5.32)
K300
K400
K500
f23
K600
f24
K700
F1
April 26, 2016 8:4 WSPC/INSTRUCTION
FILE
K1000
F2
000
K2
F3
K3000
E1
K4000
E2
K5000
E3
K6000
E4
K7000Christoph Schwab
28 Dominik Schötzau
and
E5
K10000
E6
x2
E
paper
7
E8
E9
N1
N2
N3
N4
N5
N6
N7
1
2
3
···
`
`0
e `,c
T
σ
f31
f33
f76
f77
K6
K7
f76 a1 f77
K60
c1
K70
c2
b1
K50
K40
K5
K1
b2
K10
K20
f21
f22
x3
x1
a2
K4
K2
e `,c,⊥
O
σ
0
0
e `σ −1,c = {Ki }7 and L
e `σ ,c = {K 0 }7
Fig. 4. Interface between layers L
i=1
i i=1 for σ = 0.5 and length
parameters ai , bi , ci , i = 1,N2.1 The irregular faces f21 , f22 , f76 , f77 are indicated.
N2
N3
N4
N5
N6
N7
x2
E6 a1
a2
b2
E8
c1
1
c
2 2
E7
3
···
F3
E
` 9
f23
E1
`0
F
1
f21
f22
e `,c
T
σ
`,c,⊥
E
e
2
Oσ
x
E5
b1
F2
E4
f24
x1
E3
3
Fig. 5. Illustration of the faces F1 , F2 , F3 constituting the interface from layer `0 − 1 to layer `0
for σ = 0.5. The edges of these faces are denoted by E1 , . . . , E9 . The face F1 consists of the four
irregular faces f21 , f22 , f23 , f24 .
The jumps [[πb u]]F2 and [[πb u]]F3 are defined analogously.
April 26, 2016 8:4 WSPC/INSTRUCTION FILE
paper
hp-CGFEM for Elliptic Problems in Polyhedra
29
Lemma 5.10. We have [[πb u]]F1 ∈ C 0 (F 1 ) and
[[πb u]]F1 (0, 0, 0) = 0,
[[πb u]]F1 (0, 0, c2 ) = 0,
(5.33)
[[πb u]]F1 (a2 , 0, 0) = 0,
[[πb u]]F1 (a2 , 0, c2 ) = 0.
(5.34)
Moreover, [[πb u]]F1 = [[πb u]]F3 on E 1 . (Analogous properties hold for the jumps
[[πb u]]F2 and [[πb u]]F3 , possibly across patch borders.)
Proof. The continuity of [[πb u]]F1 follows from the fact that elements K10 , . . . , K40
0
0
0
match regularly across the faces f12
, f14
, f45
, f25 . Properties (5.33), (5.34) are direct
consequences of the nodal exactness (4.4).
For the second statement, we proceed as in the proof of Lemma 5.4 and consider
x ∈ E 1 ∩ ∂Kj0 for j ∈ {1, 3}. Then,
[[πb u]]F1 (x) = [[πb u]]f2j (x) = πb |K2 u|K2 (x) − πb |Kj0 u|Kj0 (x),
[[πb u]]F3 (x) = [[πb u]]f5j (x) = πb |K5 u|K5 (x) − πb |Kj0 u|Kj0 (x).
Since the elements {Ki }7i=1 in layer `0 − 1 match regularly, by property (4.6), we
obtain πb |K2 u|K2 (x) = πb |K1 u|K1 (x) = πb |K5 u|K5 (x). This completes the proof.
We begin our construction by introducing polynomial edge-jump liftings associated with edges E1 , . . . , E9 in Figure 5; cp. Section 5.2.2. We detail this for edge E1 ,
the treatment of the other edges being analogous. With Lemma 5.10, we may set
[[πb u]]E1 := ([[πb u]]F1 )|E1 = ([[πb u]]F3 )|E1 , and define the edge lifting
(
[[πb u]]E1 (1 − x1 /a1 )(1 − x2 /b1 )
in K10 , K30 ,
E1
Lc [πb u] :=
(5.35)
0
otherwise.
1
The lifting LE
c [πb u] defines a piecewise polynomial and continuous function in
0
0
K1 ∪ K3 ; cp. Lemma 5.10, which reproduces the edge jump [[πb u]]E1 on E1 . By
construction and due to (5.34) it vanishes on edges E2 , E4 , as well as on {x1 = a1 },
{x2 = b1 }. By proceeding as in the proof of (5.19) (with isotropic element scaling),
the following bound can be readily verified.
Lemma 5.11. We have the bound
2
E1
2
6
1
NK10 [LE
NK2 [ηb ]2 + NK10 [ηb ]2 + NK30 [ηb ]2 . (5.36)
c [πb u]] + NK30 [Lc [πb u]] . p
In the setting of Figure 5, we then define the full edge lifting LE
c [πb u] as
LE
c [πb u] :=
9
X
j=1
E
Lc j [πb u],
(5.37)
E
where Lc j [πb u] is an edge lifting associated with Ej as in (5.35). The function
0
0
LE
c [πb u] is piecewise polynomial and continuous in K1 ∪ . . . ∪ K7 .
Remark 5.6. If Ej corresponds to a boundary edge, the resulting edge lifting is
identically zero, cp. (4.8). As in Remark 5.4, the introduction of corresponding edge
April 26, 2016 8:4 WSPC/INSTRUCTION FILE
30
paper
Dominik Schötzau and Christoph Schwab
jump liftings in adjacent patches yields conformity across the patch border into an
adjacent corner or corner-edge patch; cp. Assumptions 3.1, 3.2.
From estimates as in (5.36), we conclude that, over face F1 , we have
4
X
N
Ki0
2
[LE
c [πb u]]
6
2
. p NK2 [ηb ] +
4
X
i=1
i=1
NKi0 [ηb ]2 .
(5.38)
Similar bounds hold over F2 and F3 . Proceeding as in Section 5.2.2, we introduce
πbE u := πb u + LE
c [πb u] .
(5.39)
Lemma 5.12. We have [[πbE u]]F1 ∈ C 0 (F 1 ) and [[πbE u]]F1 ≡ 0 on E j for 1 ≤ j ≤ 4.
(Analogous properties hold for F2 and F3 .)
Proof. We note that [[πbE u]]F1 = [[πb u]]f2j − LE
c [πb u]|Kj0 |f2j on f2j for 1 ≤ j ≤ 4.
Hence, the continuity of [[πbE u]]F1 follows from the continuity of [[πb u]]F1 shown in
Lemma 5.10 and from the continuity of the edge jump liftings.
Next, we show that [[πbE u]]F1 = 0 on E1 ; the proof for the other edges is
analogous. Let x ∈ E 1 ∩ ∂Kj0 for j ∈ {1, 3}. We find that [[πbE u]]F1 (x) =
[[πb u]]f2j (x) − [[πb u]]f2j (x) = 0.
We lift the polynomial face jump [[πbE u]]F1 over F1 from K2 into layer `0 by
(
on {Ki0 }4i=1 ,
[[πbE u]]F1 (1 − x2 /b1 )
1 ,K2
(5.40)
LF
[πb u] :=
c
0
otherwise.
Notice that, due to Lemma 5.12, this lifting vanishes on the sets {x : (x1 , 0, x3 ) ∈
∂F1 , x2 ∈ (0, b1 )} and {x2 = b1 }, respectively, and in particular on the other faces F2
and F3 . In addition, it reproduces the jump of πbE u on F1 :
1 ,K2
1≤j≤4.
(5.41)
LF
[πb u]|Kj0 |f2j = [[πbE u]]f2j ,
c
Lemma 5.13. We have the bound
4
4
X
X
2
2
10
1 ,K2
[η
]
+
NKi0 [ηb ]2 .
[π
u]]
.
p
N
NKi0 [LF
b
K2 b
c
(5.42)
i=1
i=1
Proof. Proceeding as in the proof of (5.12) yields
4
X
i=1
1 ,K2
NKi0 [LF
[πb u]]2 . p4 h−1
c
4
X
i=1
k[[πbE u]]f2i k2L2 (f2i ) .
Applying the jump estimate (3.9) (with the fact that [[u]]f2i = 0) in conjunction
with the bound (5.38) implies the asserted bound.
1
Next, we introduce the full trace lifting LF
c [πb u] associated with the face F1 as
(
F1 ,K2
LE
[πb u]
on {Ki0 }4i=1 ,
c [πb u] + Lc
1
(5.43)
LF
[π
u]
:=
b
c
0
otherwise,
April 26, 2016 8:4 WSPC/INSTRUCTION FILE
paper
hp-CGFEM for Elliptic Problems in Polyhedra
31
F1 ,K2
with LE
[πb u] defined in (5.37) and (5.40), respectively. The lifting
c [πb u] and Lc
F1
Lc [πb u] is piecewise polynomial and continuous in ∪4i=1 Ki0 . By construction and
definition of the edge liftings, it vanishes on the elemental boundaries on the plane
{x2 = b1 }. That is, it does not extend into layer `0 + 1 in x2 -direction; cp. Figure 4.
1 ,K2
1
Moreover, since LF
[πb u] vanishes on the faces F2 , F3 , the lifting LF
c
c [πb u] affects
the values of πb u on the other faces F1 , F2 only through the edge lifting LE
c [πb u],
which gives rise to a continuous function in layer `0 and across patch borders; cp.
Remark 5.6.
1
Lemma 5.14. We have LF
c [πb u]|Ki0 |f2j = [[πb u]]f2j for 1 ≤ j ≤ 4, as well as
4
X
2
10
1
NK2 [ηb ]2 +
NKi0 [LF
c [πb u]] . p
4
X
i=1
i=1
NKi0 [ηb ]2 .
(5.44)
Proof. We establish the first assertion for f2j (the proof for the other faces is
analogous). By property (5.41) and the definition of πbE u in (5.39), we have
E
E
1
LF
c [πb u]|K10 |f21 = Lc [πb u]|K10 |f21 + [[πb u]]f21 − Lc [πb u]|K10 |f21 = [[πb u]]f21 .
Furthermore, the estimate (5.44) follows with the triangle inequality, by combining the bounds in (5.38) and (5.42).
F3
2
Upon constructing corresponding face liftings LF
c [πb u] and Lc [πb u] over the
faces F2 and F3 , respectively, we finally define the corner lifting Lc [πb u] by
Lc [πb u] :=
3
X
i=1
i
LF
c [πb u].
(5.45)
The lifted interpolant Πu := πb u + Lc [πb u] now gives rise to a piecewise polynomial
and conforming interpolant across layer `0 −1 and `0 . The support of the trace lifting
does not extend into layer `0 + 1 and preserves homogeneous Dirichlet boundary
conditions. With the triangle inequality and bounds as in (5.44), the error η = u−Πu
can be controlled in terms of ηb = u − πb u as follows.
Lemma 5.15. We have the bound
7
X
i=1
7
X
NKi [η]2 + NKi0 [η]2 . p10
NKi [ηb ]2 + NKi0 [ηb ]2 .
e `,c
5.3.2. Terminal layer elements in T
σ
(5.46)
i=1
e `−1,c = {Ki }7 to the terminal
We consider the interface from the mesh layer L
σ
i=1
e `,c = {K 0 } shown in Figure 6. As in (5.31), we denote by h the diameter of the
layer T
σ
1
shape-regular elements in the configuration. Analogously to Figure 5, we introduce
the elemental faces F1 , F2 , F3 of K10 , as well as the elemental edges E1 , . . . , E9 . In
contrast to Section 5.3.1, these faces are now regularly matching elemental faces
April 26, 2016 8:4
32
f31
f33
f76
f77
f23
WSPC/INSTRUCTION
FILE
f24
paper
Dominik Schötzau and Christoph Schwab
of K10 . Nevertheless, the jumps [[πb u]]Fi defined as in (5.3) do not vanish in general,
since the base projector vanishes on K10 , cp. (4.10). Another consequence of this
choice is that properties (5.33), (5.34) are not valid anymore.
K6
x2
E6
b1
N5
E8
c1
N6
1
2
3
···
`
`0
`,c
e
Tσ
K5
E9
N1
E1
F1
N3
N2
x3
K1
N7
K10
E7
F3
K7
a1
E5
F2
E 4 N4
E3
x1
K4
E2
K2
e `,c,⊥
O
σ
0
e `−1,c
e `,c
Fig. 6. Interface between mesh layer L
= {Ki }7i=1 and the terminal layer T
σ
σ = {K1 } for
σ = 0.5 and length parameters a1 , b1 , c1 . The faces F1 , F2 , F3 , the edges E1 , . . . , E9 and the nodes
N1 , . . . , N7 are highlighted.
To address these difficulties, we introduce polynomial nodal liftings associated
with the nodes N1 , . . . N7 shown in Figure 6. Here, we emphasize that, under the
e the point values u(Nj ) are well-defined (since
regularity assumption u ∈ Mc6 (Q),
the nodes are separated from the singular corner c).
We now focus on node N1 = (0, 0, 0). By the nodal exactness (4.4) of πb u in
layer ` − 1, we have
[[πb u]]F1 (N1 ) = [[πb u]]F2 (N1 ) = [[πb u]]F3 (N1 ) = u(N1 ).
1
This prompts us to define the polynomial vertex jump lifting LN
c [πb u] by
(
[[πb u]]F1 (N1 )LN1 (x)
on K10 ,
N1
Lc [πb u] :=
0
on {Ki }7i=1 ,
(5.47)
(5.48)
with the nodal basis function LN1 (x) := (1−x1 /a1 )(1−x2 /b1 )(1−x3 /c3 ) ∈ Q1 (K10 ).
Lemma 5.16. We have the bounds
2
8 −1
1
k[[πb u]]F1 k2L2 (F1 ) ,
NK10 [LN
c [πb u]] . p h
(5.49)
April 26, 2016 8:4 WSPC/INSTRUCTION FILE
paper
hp-CGFEM for Elliptic Problems in Polyhedra
33
and
2
8
2
2
1
NK10 [LN
c [πb u]] . p NK10 [ηb ] + NK2 [ηb ] .
(5.50)
Proof. As in the proof of Lemma 5.3, we first let the configuration in Figure 3 be
of unit size. Clearly,
2
2
2
1
kLN
c [πb u]kL2 (K10 ) . |[[πb u]]F1 (N1 )| . k[[πb u]]F1 kL∞ (F1 ) .
With the inverse inequality in Ref. 16 (Theorem 4.76), we conclude that
2
2
2
4
1
kLN
c [πb u]kL2 (K10 ) . k[[πb u]]F1 kL∞ (F1 ) . p k[[πb u]]F1 kL2 (F1 ) .
Moreover, applying the inverse inequality (5.14) yields
2
8
2
1
k∇LN
c [πb u]kL2 (K10 ) . p k[[πb u]]F1 kL2 (F1 ) ,
which shows the assertion in the reference case. In the general case, isotropic versions
of the scalings in Lemma 3.1 imply the bound (5.49); cp. (5.15) and (5.16). The
bound (5.50) follows from (5.49) and the jump bound (3.9) (since [[u]]F1 = 0 for
F1 = int(∂K2 ∩ ∂K10 )).
Similar constructions for the other nodes in Figure 6 give rise to nodal liftN
ings Lc j [πb u], for 1 ≤ j ≤ 7, with analogous properties. We then define the full
vertex lifting
LN
c [πb u] :=
7
X
j=1
N
Lc j [πb u].
(5.51)
From bounds analogous to (5.50), we have
2
8
2
2
2
2
NK10 [LN
.
c [πb u]] . p NK2 [ηb ] + NK5 [ηb ] + NK7 [ηb ] + NK10 [ηb ]
(5.52)
Remark 5.7. If Nj corresponds to a boundary node, then the resulting vertex
N
lifting Lc j [πb u] is identically zero; cp. property (5.47). Moreover, the definitions of
corresponding vertex liftings in the terminal layers of adjacent corner or corner-edge
patches (matching regularly over patch interfaces due to Assumptions 3.1, 3.2) yield
conformity of the nodal liftings LN
c [πb u] across patch borders.
The modified base projector
(
πbN u :=
πb u + L N
c [πb u]
πb u
on K10 ,
otherwise.
(5.53)
satisfies the properties analogous to those in Lemma 5.10.
Lemma 5.17. We have [[πbN u]]F1 = [[πbN u]]F3 on E 1 and [[πbN u]]F1 (Nj ) = 0 for
1 ≤ j ≤ 4. (Analogous identities hold on the other faces and edges, possibly across
patch borders.)
April 26, 2016 8:4 WSPC/INSTRUCTION FILE
34
paper
Dominik Schötzau and Christoph Schwab
Proof. For x ∈ E 1 , we have
[[πbN u]]F1 (x) = πb |K2 u|K2 (x) − LN
c [πb u]|K10 (x),
[[πbN u]]F3 (x) = πb |K5 u|K5 (x) − LN
c [πb u]|K10 (x).
As in the proof of Lemma 5.10, since {Ki }7i=1 match regularly in layer ` − 1, we
conclude with (4.6) that πb |K2 u|K2 (x) = πb |K5 u|K5 (x).
Then, by construction and the definition of the jumps we have
N
[[πbN u]]F1 (Nj ) = [[πb u]]F1 (Nj ) − Lc j [πb u]|K10 (Nj ) = [[πb u]]F1 (Nj ) − [[πb u]]F1 (Nj ) = 0.
This yields the second assertion on the face F1 .
With Lemma 5.17, we now continue our analysis along the lines of Section 5.3.1,
by employing the projector πbN u instead of πb u. To do so, we first introduce edge
liftings associated with the edge jumps [[πbN u]]Ei and defined similarly to those
1
in (5.17), (5.35), (5.37). Second, we adapt the polynomial face lifting LF
c [·] in (5.43)
F2
F3
(and analogously Lc [·], Lc [·]) to the slightly different setting in Figure 6, giving
K0
rise to a polynomial corner lifting Lc 1 [πbN u] as in (5.45), (5.46), but defined only
over K10 . By construction, this lifting satisfies
K0
1 ≤ j ≤ 3.
(5.54)
Lc 1 [πbN u]|K10 |Fj = [[πbN u]]Fj ,
In the configuration of Figure 6, we introduce the terminal layer lifting
K0
N
N
1
LT
(5.55)
c [πb u] := Lc [πb u] + Lc [πb u] .
Lemma 5.18. We have LT
c [πb u]|K10 |Fj = [[πb u]]Fj for 1 ≤ j ≤ 3, as well as
2
18
(5.56)
NK10 [LT
NK10 [ηb ]2 + NK2 [ηb ]2 + NK5 [ηb ]2 + NK7 [ηb ]2 .
c [πb u]] . p
Proof. We apply identity (5.54) and the definition of the jumps. This results in
N
N
LT
c [πb u]|K10 |Fj = Lc [πb u]|K10 |Fj + [[πb u]]Fj − Lc [πb u]|K10 |Fj = [[πb u]]Fj ,
and proves the first assertion. To show (5.56), we note that
K0
N
2
2
N
2
1
NK10 [LT
c [πb u]] . NK10 [Lc [πb u]] + NK10 [Lc [πb u]] .
According to (5.52), we have
2
8
NK10 [LN
NK10 [ηb ]2 + NK2 [ηb ]2 + NK5 [ηb ]2 + NK7 [ηb ]2 .
c [πb u]] . p
Moreover, by proceeding as in the proof of (5.44) we find that
K0
NK10 [Lc 1 [πbN u]]2 . p10 NK2 [ηb ]2 + NK5 [ηb ]2 + NK7 [ηb ]2 + NK10 [u − πbN u]2 .
Finally, with the triangle inequality and as above with (5.52),
p10 NK10 [u − πbN u]2 . p18 NK10 [ηb ]2 + NK2 [ηb ]2 + NK5 [ηb ]2 + NK7 [ηb ]2 .
This completes the proof.
April 26, 2016 8:4 WSPC/INSTRUCTION FILE
paper
hp-CGFEM for Elliptic Problems in Polyhedra
35
With Lemma 5.18 the lifted interpolant Πu := πb u+LT
c [πb u] is conforming across
layers ` − 1 and `, and preserves the essential boundary conditions. Analogously to
Section 5.2.2 and with the estimate (5.56), the terminal layer version of Lemma 5.15
follows.
Lemma 5.19. We have the bound
NK10 [η]2 +
7
X
NKi [η]2 . p18 NK10 [ηb ]2 +
7
X
i=1
i=1
NKi [ηb ]2 .
(5.57)
f`,c
This completes the construction of the jump liftings for the corner patch M
σ .
`,c
`,c
e
e
Lemma 5.15 (for submesh Oσ ) and Lemma 5.19 (for submesh Tσ ) give the
f`,c
bound (3.26) over the reference corner patch M
σ .
Proposition 5.3. With (5.1) we have ΥM
[η] . p18 ΥM
[ηb ].
f`,c
f`,c
σ
σ
f`,ce
5.4. Corner-edge patch M
σ
We finally construct polynomial jump liftings in the reference corner-edge
f`,ce
patch M
σ . We consider in detail the case of a corner-edge patch with geometric
refinements along a single edge e as shown in Figure 1 (right), and comment on the
case with refinements along two or three edges in Section 5.4.2 ahead.
5.4.1. Refinement along one edge
f`,ce
e with geometric refinement
Let M
be a corner-edge reference patch mesh on Q
σ
along the single edge e. We partition the patch mesh into
e `,c,⊥ ∪. M
e `,c ∪. O
f`,ce,k ,
f`,ce := T
M
σ
σ
σ
σ
`≥1,
(5.58)
e `,c consists of a single and isotropic terminal layer element at the corner c,
where T
σ
e `,c,⊥ is a corner-patch type mesh consisting of shape-regular eleand the mesh O
σ
f`,ce,k
ments which are refined into the corner c. The mesh M
consists of a sequence
σ
of ` geometrically scaled edge-patch meshes, properly translated along the edge e:
f`,ce,k
M
=
σ
`
[
`0 =1
e `0 ,ce (M
f`σ0 ,e ) ,
Ψ
(5.59)
e `0 ,ce the operation of translation with respect to the edgewhere we denote by Ψ
parallel variable xk combined with a dilation by a factor only depending on σ, `, `0 ,
f`0 ,e is a reference edge patch on Q
e with `0 + 1 mesh
and where the mesh M
σ
layers; cp. (3.5). In Figure 7, a schematic illustration of the patch decomposition (5.58), (5.59) is provided.
e `−1,ce (M
f`−1,e ) and Ψ
e `,ce (M
f`,e ) are
The two outermost edge-patch meshes Ψ
σ
σ
`−1,ce
0
0
0
e
f`−1,e ),
(M
indicated in Figure 8 (left). There, the hexahedra K3 , K4 , K6 in Ψ
σ
K1
K1
E2
K2000
K2000
E3
000
K3
K3000
E4
000
K4
K4000
E5
K5000
K5000
E6
000
K
K6000
E7
April 26,60002016 8:4 WSPC/INSTRUCTION
FILE
paper
K7
K7000
E8
K10000
K10000
E9
f21
f21
N1
f22
f22
N2
f31
f31
N3
f33
f33
N4
36
Dominik
Schötzau
and
Christoph
Schwab
f76
f76
N5
f77
f77
N6
f23
f23
N7
e `,c,⊥
f24
f24
O
σ F1
F1
F2
F2 F3
F3 E1
E
1
E2
E2
E3
12 3 ·E
· ·3
`
`0
E4
E4
e `,c
T
σ
E5
E5
E6
E
Fig. 7. Patch decomposition (5.58), (5.59) for σ 6= 0.5 and ` = 5. The scaled edge-patch meshes
E7for `0 = 1, . . . , ` are displayed in boldface. The subdiagonal
E7
elements in D`0 are shaded. The single
e `,c
is indicated. The
E8terminal layer element in T
E8 remaining elements belong to the corner-type
σ
e `,c,⊥
E9mesh Oσ .
E9
N1
N1
N2
N2
K6
K600
N3
N3
N4
N4
K60
K6
K100
N5
N5
K10
N6
K400 N6
N7 K 5
N7
K50
K5
K40
K4
1
1
2
3
···
`
`0
`,c
e
Tσ
K1
e `,c,⊥
O
σ
K10
K20
K2
2
K4 3
···
`
`0
`,c
e
Tσ
e `,c,⊥
O
σ
K1
K2
e `−1,ce (M
f`−1,e
e `,ce (M
f`,e
Fig. 8. Left: The edge-patch meshes Ψ
) and Ψ
σ
σ ) for σ = 0.5 and ` = 5.
0 } and the first edge-patch block Ψ
e 1,ce (M
f1,e
e `,c
=
{K
Right: Interface between T
σ ) for σ = 0.5 and
σ
1
` = 2.
e `,ce (M
f`,e ) will be referred to as diagonal elements. Moreover,
and K3 , K4 , K6 in Ψ
σ
the immediate neighbors of K30 , K40 , K60 across the patch interface are denoted by
D` := {K300 , K400 , K600 },
(5.60)
and are called the subdiagonal elements. (Note that K3 , K30 , K300 are not explicitly
labelled in Figure 8.) The diagonal and subdiagonal elements are shape-regular
(uniformly in `). We may thus assume that
hKi ' hKi0 ' hKi00 ' h,
i ∈ {3, 4, 6},
(5.61)
April 26, 2016 8:4 WSPC/INSTRUCTION FILE
paper
hp-CGFEM for Elliptic Problems in Polyhedra
37
for a mesh size parameter h. Corresponding conventions will be employed in the
other scaled edge-patch meshes for 2 ≤ `0 ≤ `. In particular, we denote by D`0 the
corresponding set of subdiagonal elements. In Figure 8 (right), we further illustrate
e `,c = {K 0 } and Ψ
e 1,ce (M
f1,e ). The diagonal elements are
the interface between T
σ
1
σ
K3 , K4 , K6 , while the set
D1 := {K100 }
e 1,ce
(5.62)
f1,e ).
(M
σ
consists of a single subdiagonal element in Ψ
f`,ce
In the sequel, we construct polynomial jump liftings over irregular faces of M
σ
in (5.58), (5.59) starting from the base projector πb u defined in (4.10). First, on
all irregular faces which are situated parallel to e and which belong to an edgee `0 ,ce (M
f`σ0 ,e ), 1 ≤ `0 ≤ `, we apply the (scaled) jump liftings Le [πb u]
patch mesh Ψ
0
and LT
e [πb u] constructed in (5.8) and (5.17), respectively. For ` = 1, only a scaled
T
version of Le [πb u] is employed. As shown in Lemma 5.2 (for Le [πb u]) and Lemma 5.8
(for LT
e [πb u]), these liftings remove the polynomial face jumps across irregular faces
situated as in Figures 2 and 3. We denote by πb? u the intermediate base projector
f`,ce,k
thus constructed from πb u over M
. This yields a continuous projector within
σ
each edge-patch block.
10
?
Lemma 5.20. We have ΥM
f`,ce,k [u − πb u] .
f`,ce,k [u − πb u] . p ΥM
σ
σ
Proof. This follows from the bound in Proposition 5.2, which holds true for edgeparallel hexahedra of general aspect ratio with 0 < h⊥ . hk . 1.
f`,ce,k
We further analyze the continuity properties of πb? u over M
in edge-parallel
σ
direction (i.e., across interfaces perpendicular to e). As in Remarks 5.2 and 5.5, the
tensor-product structure of the projector πb u and the liftings Le [πb u], LT
e [πb u] en?
sures the continuity of the intermediate projection πb u across the scaled edge-patch
e `,ce (M
f`,e ) into an adjacent edge or corner-edge patch where the same jump
mesh Ψ
σ
liftings are applied. Then, to investigate the conformity between adjacent edge-patch
blocks across interfaces perpendicular to e, we may again focus on the two adjacent
e `−1,ce (M
f`−1,e ), Ψ
e `,ce (M
f`,e ) shown in Figure 8 (left). Then,
edge-patch blocks Ψ
σ
σ
?
with the same arguments as above, πb u is continuous across such interfaces, with
the exception of the perpendicular faces associated with the subdiagonal elements
e `,ce (M
f`,e
K300 , K400 , K600 of Ψ
σ ). Indeed, by definition of the liftings Le [πb u] in (5.8),
πb? u = πb u
on {K3 , K30 , K4 , K40 , K6 , K60 },
(5.63)
since the diagonal elements constitute the outermost layers in the scaled edge-patch
e `−1,ce (M
fσ`−1,e ) and Ψ
e `,ce (M
f`,e
blocks Ψ
σ ). However, on the subdiagonal elements
00
00
00
`,ce f`,e
e
K3 , K4 , K6 in Ψ (Mσ ) depicted in Figure 8 (left), the base projector πb u is
altered by the addition of the (scaled) lifting Le [πb u] which does not generally
vanish on the interface x3 = 0; cp. Remark 5.2. As a consequence, the projector πb? u
is generally not continuous over the faces fK30 ,K300 , fK40 ,K400 and fK60 ,K600 . By the selff`,ce,k
similar structure of the mesh M
, the same difficulty arises in the subdiagonal
σ
April 26, 2016 8:4
38
f21
f22
f31
f33
f76
f77
WSPC/INSTRUCTION
FILE
f23
f24
F1
F2
F3
paper
Dominik Schötzau and Christoph Schwab
E
3
e `0 ,ce (M
f`σ0 ,e ), for 2 ≤ `0 ≤ `, cp. Figure 7. In
elements of each scaled
edge patch Ψ
E4
addition, in the case `0E= 1, see Figure 8 (right), it follows similarly that
5
Eπ6b? u = πb u
on {K3 , K4 , K6 , K10 },
(5.64)
E7
and that πb u is in general non-conforming over the face fK10 ,K100 .
E8
Second, we correct the non-conformity across the critical faces as discussed
E9
above. We consider first the case 2 ≤ `0 ≤ `. In Figure 9, we illustrate the three
N1
e `0 −1,ce (M
f`σ0 −1,e )
subdiagonal elements K300 , K400 , K600 on the patch interface between Ψ
0
0
N
2
e ` ,ce f` ,e
and Ψ
(Mσ ), employing the notation in Figure 8 (left). Without loss of generality, we may assume that the interface lies on x3 = 0.
N5
N7 b
x2
1
N6
1
2
K600
3
· · · E2
`
K300
`0
e `,c
N3
T
σ
e `,c,⊥
O
σ
K400
N4
E1
x1
a1
Fig. 9. Subdiagonal elements K300 , K400 , K600 on the interface x3 = 0 between two adjacent edge-patch
blocks for σ = 0.5 and 2 ≤ `0 ≤ `. The nodes N3 , N4 , N6 and the edges E1 , E2 are indicated.
Lemma 5.21. Let 2 ≤ `0 ≤ `. In the setting of Figure 9, we have
πb? |Ki0 u|Ki0 (Ni ) = πb? |Ki00 u|Ki00 (Ni ),
i ∈ {3, 4, 6},
(5.65)
for the nodes N3 = (0, 0, 0), N4 = (a1 , 0, 0), N6 = (0, b1 , 0), as well as
πb? |Ki0 u|Ki0 = πb? |Ki00 u|Ki00
(5.66)
on each closed line segment shown in boldface for the corresponding element index
i ∈ {3, 4, 6}. In addition, on the edge Ei = E1 ∩ ∂Ki0 with i ∈ {3, 4}, there holds
(5.67)
πb? |Ki0 u|Ki0 |Ei = πb |K2 u|K2 |Ei = πb |K4 u|K4 |Ei .
Similarly, on the edge Ei = E2 ∩ ∂Ki0 with i ∈ {3, 6}, there holds
πb? |Ki0 u|Ki0 |Ei = πb |K5 u|K5 |Ei = πb |K6 u|K6 |Ei .
(5.68)
Proof. We verify (5.65) for i = 3. With the properties (5.63), (4.6), the definition
of πb? u and the identities (5.6), we conclude that
πb? |K30 u|K30 (N3 ) = πb |K30 u|K30 (N3 ) = πb |K300 u|K300 (N3 ) = πb? |K300 u|K300 (N3 ).
April 26, 2016 8:4 WSPC/INSTRUCTION FILE
paper
hp-CGFEM for Elliptic Problems in Polyhedra
39
Moreover, consider a line segment and the corresponding index i ∈ {3, 4, 6}. Hence,
by Lemma 5.2, πb? |Ki00 u|Ki00 is identically equal to πb |Ki00 u|Ki00 on the segment, which
in turn is equal to πb |Ki0 u|Ki0 = πb? |Ki0 u|Ki0 ; cp. property (4.6). This yields (5.66). The
properties (5.67) and (5.68) follow from (5.63) and the fact that πb u is continuous
over fK2 ,K4 and fK5 ,K6 .
We next adjust the projector πb? u on the faces of the subdiagonal elements of D`0
in (5.60). To that end, for an axiparallel hexahedral element K, we will express
πb? |K u|K as a linear combination of the Lagrangian basis functions associated with
the (mapped) (p+1)-point tensor-product Gauss-Lobatto interpolation nodes on K;
cp. Refs. 3, 18. Fix an element Ki00 ∈ D`0 with i ∈ {3, 4, 6}. We denote by fi the
face fKi0 ,Ki00 . On Ki00 , we modify πb? u to πbD,? u, by explicitly altering the (p + 1)2
Gauss-Lobatto face degrees of freedom of (πb? u)|Ki00 on f i ⊂ ∂Ki00 so that we have
πbD,? |Ki00 u|Ki00 |f i = πb? |Ki0 u|Ki0 |f i ,
i ∈ {3, 4, 6}.
(5.69)
In view of Lemma 5.21, the projector πbD,? u yields a conforming approximation,
which is now continuous across the critical faces f i = f Ki0 ,Ki00 for i ∈ {3, 4, 6} and
has the same continuity properties as πb? u elsewhere. It also preserves homogeneous
Dirichlet boundary conditions.
Lemma 5.22. Let 2 ≤ `0 ≤ `. Then:
πbD,? u = πb? u = πb u
on {K3 , K30 , K4 , K40 , K6 , K60 }.
(5.70)
In addition, we have the bounds
NKi00 [πbD,? u − πb? u]2 . p2 h−1 kπbD,? u − πb? uk2L2 (fi ) ,
i ∈ {3, 4, 6},
(5.71)
with the mesh size parameter h in (5.61), and
X
X
NKi00 [πbD,? u − πb? u]2 . p2
(NKi0 [u − πb? u]2 + NKi00 [u − πb? u]2 ). (5.72)
i∈{3,4,6}
i∈{3,4,6}
Proof. Property (5.70) follows from (5.63) and (5.69). To verify (5.71), we note
that, upon an isotropic scaling argument as in Lemma 3.1 and (5.15), (5.16), it is
sufficient to consider the case where Ki00 and Ki0 are of unit size. By (5.69), the
difference (πbD,? u − πb? u)|Ki00 then vanishes in the interior Gauss-Lobatto tensorproduct points on Ki00 . The inequality in Ref. 3 (Lemma 3.1, Equation (16)) thus
yields
kπbD,? u − πb? uk2L2 (K 00 ) . p−2 kπbD,? u − πb? uk2L2 (fi ) .
i
Again, the inverse inequality (5.14) shows that
k∇(πbD,? u − πb? u)k2L2 (K 00 ) . p2 kπbD,? u − πb? uk2L2 (f 0 ) ,
i
which implies (5.71).
i
April 26, 2016 8:4 WSPC/INSTRUCTION FILE
40
paper
Dominik Schötzau and Christoph Schwab
To establish (5.72), we start from the bound (5.71) and employ the triangle
inequality (along with the fact that u is continuous over fi ), property (5.69), and
the trace inequality in Ref. 14 (Lemma 4.2 with t = 2); cp. the bound (3.9). This
readily results in
NKi00 [πbD,? u − πb? u]2 . p2 h−1 ku|Ki0 − (πbD,? u)|Ki00 k2L2 (fi ) + k(u − πb? u)|Ki00 k2L2 (fi )
. p2 h−1 k(u − πb? u)|Ki0 k2L2 (fi ) + k(u − πb? u)|Ki00 k2L2 (fi )
. p2 NKi0 [u − πb? u]2 + NKi00 [u − πb? u]2 .
The assertion follows.
The case `0 = 1 is treated analogously; cp. Figure 8 (right). In accordance
to (5.69), we define πbD,? u on K100 ∈ D1 so that
πbD,? |K100 u|K100 |f 1 = πb? |K10 u|K10 |f 1 ,
(5.73)
over the face f1 = fK10 ,K100 . The projector πbD,? u is conforming over the face fK10 ,K100 in
Figure 8 (right) and preserves potential homogeneous Dirichlet boundary conditions
on patch faces. The analog of (5.72) reads as follows.
Lemma 5.23. Let `0 = 1. Then:
πbD,? u = πb? u = πb u
on {K3 , K4 , K6 , K10 }.
(5.74)
In addition, we have the bound
NK100 [πbD,? u − πb? u]2 . p2 (NK10 [u − πb? u]2 + NK100 [u − πb? u]2 ).
(5.75)
In conclusion, the projector πbD,? u defined in (5.69), (5.73) gives a piecewise
f`,ce,k
polynomial and conforming approximation over the entire mesh M
in (5.59).
σ
`,ce,k
e `,c in edgefσ
In addition, it is conforming over the interface between M
and T
σ
parallel direction (i.e., over the face fK10 ,K100 in Figure 8 (right)). The projector πbD,? u
satisfies homogeneous Dirichlet boundary conditions on corresponding patch boundaries.
D,?
12
Lemma 5.24. We have ΥM
f`,ce,k [u − πb u] . p ΥM
f`,ce,k [u − πb u]. .
σ
σ
Proof. By employing the triangle inequality, this follows from Lemmas 5.22, 5.23
in combination with the bound in Lemma 5.20.
e `0 ,ce (M
f`0 ,e ) and O
e `,c,⊥
Third, we address the continuity across faces between Ψ
σ
σ
0
for 1 ≤ ` ≤ `. We consider again the two configurations in Figure 8. In the case
2 ≤ `0 ≤ `, the projector πbD,? u is already continuous over the regular faces fK1 ,K3 ,
fK2 ,K4 , and fK5 ,K6 , due to properties (5.70) and (4.6). Similarly, πbD,? u is conforming over the faces fK10 ,K30 , fK20 ,K40 , fK50 ,K60 . For `0 = 1, continuity of πbD,? u is ensured
across fK1 ,K3 , fK2 ,K4 and fK5 ,K6 ; cp. (5.74). However, there are in general nonzero
polynomial face jumps across the irregular faces f2i = fK2 ,Ki0 , i ∈ {1, 2, 3, 4}, and
April 26, 2016 8:4 WSPC/INSTRUCTION FILE
paper
hp-CGFEM for Elliptic Problems in Polyhedra
41
f5i = fK5 ,Ki0 for i ∈ {1, 4, 5, 6}, as well as over analogous faces in the omitted
mesh structure (recall from (5.70) that πbD,? u = πb u on K30 , K40 , K60 ). The geometf`,c
ric situation is similar to that in the shape-regular corner patch M
σ shown in
Figure 4. Over these irregular faces, we thus construct polynomial face jump liftings similarly to Lc [πb u] in (5.43), (5.45) (with the aid of associated edge liftings
as in (5.35), (5.37)). The face liftings are supported in K10 ∪ K20 ∪ K30 ∪ K40 and
K10 ∪ K40 ∪ K50 ∪ K60 and are stable polynomially in p, as was shown in Section 5.3.
We also note that conformity across the corner-edge patch into a neighboring corner
or corner-edge patch is guaranteed by Assumptions 3.1, 3.2. We denote by πb?? u the
e `,c,⊥ . Lemma 5.15
lifted projector thus obtained from the base projector πb u on O
σ
then implies the ensuing bound.
??
10
Lemma 5.25. We have ΥO
`,ce,⊥ [u − π
`,ce,⊥ [u − πb u].
eσ
eσ
b u] . p ΥO
e `,c in (5.58). The projector π D,? u over
Fourth, we enforce continuity into T
σ
b
is continuous across fK10 ,K100 in Figure 8 (right). Hence, it remains to enforce
e `,c,⊥ from K2 , K5 into the corner element K 0 . Since
the conformity of πb?? u over O
σ
1
??
πb u = πb u on the faces fK2 ,K10 , fK5 ,K10 , this can be achieved with the introduction
of face jump liftings for πb?? u over fK2 ,K10 and fK5 ,K10 , similarly to LT
c [πb u] in (5.55)
and in conjunction with vertex and edge jump liftings as in Section 5.3.2 (which
yield conforming approximations across neighboring patches). A bound analogous
to (5.57) holds for the lifted projector still denoted by πb?? u, with an algebraic loss
of p18 .
f`,ce,k
M
σ
Lemma 5.26. We have ΥTe `,c
[u − πb?? u] . p18 ΥTe `,c
[u − πb u].
σ
σ
f`,ce as
We define the lifted patch projector Πu over the corner-edge patch M
σ
.
`,ce,k
D,?
??
`,c,⊥
`,c
e
e
f
Πu := πb u on Mσ
and Πu := πb u on Oσ
∪ Tσ . It is conforming over
the entire corner-edge patch and preserves essential boundary conditions. Moreover,
Assumptions 3.1, 3.2 ensure the conformity over adjacent patches. With the bounds
in Lemmas 5.24, 5.25 and 5.26, we conclude that bound (3.26) holds over the cornerf`,ce
edge patch M
σ .
Proposition 5.4. With (5.1) we have ΥM
[η] . p18 ΥM
[ηb ].
f`,ce
f`,ce
σ
σ
This completes the construction of the reference corner-edge patch projector in
the case of refinement along one edge e.
5.4.2. Simultaneous refinements
f`,ce
Finally, we comment on extensions to the case where M
is simultaneously refined
σ
along two or three edges.
We first consider refinements towards two edges e1 , e2 as shown in Figure 10. In
this situation and analogously to (5.58), we write
e `,c ∪. O
e `,c,x3 ∪. M
f`,ce := T
f`,ce1 ,k ∪ M
f`,ce2 ,k ,
M
(5.76)
σ
σ
σ
σ
σ
f22
f22
f31
f31
f33
f33
f76
f76
f77
f77
f23
f23
April 26, 2016 8:4 WSPC/INSTRUCTION FILE
paper
f24
f24
F1
F1
F2
F2
F3
F3
E1
E1
E2
E2
42
Dominik
Schötzau
and
Christoph
Schwab
E3
E3
E4
E4
e `,c consists again of the single terminal
E5where T
E5
layer element abutting at the corσ
1 ,k
e `,c,x3 is a corner-type mesh in
f`,ce
E6ner c, and O
E
x
-direction.
The submeshes M
and
σ
6 3
σ
`,ce
,k
2
fσ
E7 M
are two non-disjoint sequencesEof7 ` scaled edge-patch meshes as in (5.59);
E8they overlap over the mutual diagonal elements
E8
K3 , K6 and K30 , K60 as illustrated in
E9Figure 10 (left) (the overlap in the omitted
E9 mesh structure is analogous). In the subN1
N1
N2
N2
00
K
K
6
6
N3
N3
N4
N4
K6000
K60
K6
K100
N5
N5
K10
N6
K400 N6
N7
N7
K1000
K40
K4
1
1
2
2
00
0
0
K2
K
K
K1
K
3
1
2
1
K4 3
···
···
`
`
x3
`0
`0
e `,c
e `,c
T
T
σ
σ
K
K
2
1
`,c,⊥
`,c,⊥
eσ
eσ
O
O
Fig. 10. Refinement towards two edges. Left: Outermost edge-patch blocks for σ = 0.5 and ` = 5.
0
e `,c
Right: Interface between T
σ = {K1 } and the first edge-patch blocks for σ = 0.5 and ` = 2.
1 ,k
2 ,k
f`,ce
f`,ce
meshes M
and M
, we apply the liftings Le [πb u], LT
σ
σ
e [πb u] in (5.8), (5.28),
respectively. As in (5.63), these liftings leave the base projector πb u unchanged on
the diagonal elements, which are given by K1 , K3 , K4 , K6 and K10 , K30 , K40 , K60 for
blocks away from c (case 2 ≤ `0 ≤ `) and by K1 , K3 , K4 , K6 and K10 for the last
configuration abutting at c (case `0 = 1). Similarly to the discussion in Section 5.4.1,
the resulting lifted projector πb? u is generally non-conforming over the regular faces
fK10 ,K100 , fK30 ,K300 , fK30 ,K3000 , fK40 ,K400 fK60 ,K600 , and fK60 ,K6000 in the case of edge-patch
block `0 with 2 ≤ `0 ≤ `, as well as over fK10 ,K100 and fK10 ,K1000 in the case `0 = 1.
(Note that the elements K3 , K30 , K300 , K3000 are not explicitly labelled in Figure 10.)
The definitions (5.69), (5.73) of the projector πbD,? u can be readily extended to the
configuration in Figure 10, by replacing the set D`0 in (5.63), (5.64) by
(
{K100 , K300 , K3000 , K400 , K600 , K6000 }, 2 ≤ `0 ≤ `,
(5.77)
D `0 =
{K100 , K1000 },
`0 = 1,
where we employ notation as in Figure 10. The projector πbD,? u coincides with πb u
on the diagonal elements indicated in Figure 10; cp. properties (5.70), (5.74). Moreover, corresponding variants of Lemma 5.22, Lemma 5.23 and Lemma 5.24 hold
1 ,k
e `,c,x3 and M
f`,ce
fσ`,ce2 ,k follows as in
true. Continuity across faces between O
,M
σ
σ
K3000
K5000
K7000
K3000
K4000
K5000
K6000
K7000
0000
April 26,K2016
8:4 WSPC/INSTRUCTION FILE
1
paper
f21
f21
f22
f22
f31
f31
f33
f33
f76
f76
f77
f77
hp-CGFEM
for Elliptic Problems in Polyhedra 43
f23
f23
f24Section 5.4.1, by invoking property (4.6)
f24 across regular faces. Polynomial jumps
e `,c,x3 are lifted
F1over irregular faces within O
F1
as in the corner patch case, and the
σ
0
`
e
F2corner element K1 in Tc is treated as Fbefore,
thereby providing estimates as in
2
F3Lemmas 5.25 and 5.26. Consequently, Proposition
F3
5.4 holds true also for cornerE1edge patches which are refined along two
E1edges.
E2
E2
Next, we consider the case of refinements
towards the three edges e1 , e2 , e3 as
E3illustrated in Figure 11. In this case, weEdecompose
the corner-edge patch into
3
.
E4
E
4
`,ce
`,c
`,ce
,k
`,ce
,k
3 ,k
e ∪ M
fσ := T
fσ 1 ∪ M
fσ 2 ∪ M
f`,ce
M
.
(5.78)
σ
σ
E5
E5
`,ce
,k
e `,c contains the single corner element,
fσ i is sequence of ` scaled
E6The set T
E6
and M
σ
E7edge-patch blocks as in (5.59) along edgeEe
7 i . These sequences overlap on the mutual
E8diagonal elements as illustrated in Figure
E8 10. The overlap is similar in the omitted
E9mesh structure.
E9
N1
N1
N2
N2
00
K
K
6
6
N3
N3
N4
N4
K6000
K60
K6
K100
N5
N5
K10
N6
K400 N6
N7
N7
K1000
K40
K4
1
1
2
2
0
00
K
K
K
K1
K10000
4
3
3
1
1
···
···
K4000
`
`
`0
`0
e `,c
e `,c
T
T
σ
σ
K1
K1000
`,c,⊥
`,c,⊥
eσ
eσ
O
O
Fig. 11. Refinement toward three edges. Left: Outermost edge-patch blocks for σ = 0.5 and ` = 5.
0
e `,c
Right: Interface between T
σ = {K1 } and the first edge-patch block for σ = 0.5 and ` = 2.
The intermediate projector πb? u is obtained from πb u after application of the
f`,cei ,k . While we have
liftings Le [πb u] and LT
e [πb u] on each of the submeshes Mσ
?
again πb u = πb u on diagonal elements, the approximation πb? u is non-conforming
across edge-perpendicular faces of the subdiagonal elements given by
(
{K100 , K1000 , K300 , K3000 , K30000 , K400 , K4000 , K600 , K6000 }, 2 ≤ `0 ≤ `,
D `0 =
(5.79)
{K100 , K1000 , K10000 },
`0 = 1,
employing notation as in Figure 11. As before, the definitions (5.69), (5.73) of the
projector πbD,? u can be generalized to the configuration in Figure 11, by using the
subdiagonal elements in (5.79). This gives rise to a conforming approximation πbD,? u
April 26, 2016 8:4 WSPC/INSTRUCTION FILE
44
paper
Dominik Schötzau and Christoph Schwab
`,ce ,k
fσ i . It is also continuous across the faces fK 0 ,K 00 ,fK 0 ,K 000 and fK 0 ,K 0000
over ∪3i=1 M
1
1
1
1
1
1
e `,σ , cp. (4.10), there is
in Figure 11 (right). Since πb u is identically zero on K10 ∈ T
σ
e `,c . Therefore, Proposition 5.4 remains valid for
no need for further liftings into T
σ
corner-edge patches which are geometrically refined along three edges e ∈ E c which
meet at a convex vertex c.
Finally, we emphasize that the case of edges meeting at a reentrant vertex c, i.e.
a Fichera corner, can be dealt with by superposition of the preceding constructions
on seven patches: one corner patch (cp. Section 5.3), three corner-edge patches with
a single edge (cp. Figure 8) and three corner-edge patches with two edges meeting
at c (cp. Figure 10). In view of Assumptions 3.1, 3.2, the lifting constructions given
above are conforming across patch interfaces.
6. Acknowledgment
This work was supported in part by the Natural Sciences and Engineering Research
Council of Canada (NSERC) and by the European Research Council (ERC) under
grant AdG STAHDPDE 247277.
References
1. I. Babuška and B. Q. Guo. Regularity of the solution of elliptic problems with piecewise
analytic data. I. Boundary value problems for linear elliptic equation of second order.
SIAM J. Math. Anal., 19(1):172–203, 1988.
2. I. Babuška and B. Q. Guo. Approximation properties of the h-p version of the finite
element method. Comput. Methods Appl. Mech. Engrg., 133(3-4):319–346, 1996.
3. E. Burman and A. Ern. Continuous interior penalty hp-finite element methods for
advection and advection-diffusion equations. Math. Comp., 76(259):1110–1140, 2007.
4. M. Costabel, M. Dauge, and S. Nicaise. Analytic regularity for linear elliptic systems
in polygons and polyhedra. Math. Models Methods Appl. Sci., 22(8), 2012.
5. M. Costabel, M. Dauge, and Ch. Schwab. Exponential convergence of hp-FEM for
Maxwell’s equations with weighted regularization in polygonal domains. Math. Models
Methods Appl. Sci., 15(4):575–622, 2005.
6. W. Dahmen and K. Scherer. Best approximation by piecewise polynomials with variable knots and degrees. J. Approx. Theory, 26(1):1–13, 1979.
7. L. Demkowicz, Jason J. Kurtz, D. Pardo, M. Paszyński, W. Rachowicz, and A. Zdunek.
Computing with hp-Adaptive Finite Elements. Vol. 2: Frontiers: Three Dimensional
Elliptic and Maxwell Problems with Applications. Chapman & Hall/CRC Applied
Mathematics and Nonlinear Science Series. Chapman & Hall/CRC, Boca Raton, FL,
2007.
8. P. Frauenfelder. hp-Finite Element Methods on Anisotropically, Locally Refined
Meshes in Three Dimensions with Stochastic Data. PhD thesis, Swiss Federal Institute
of Technology. Diss. ETH No. 15750, 2004. URL: http://e-collection.library.ethz.ch/.
9. W. Gui and I. Babuška. The h, p and h-p versions of the finite element method in 1
dimension. II. The error analysis of the h- and h-p versions. Numer. Math., 49(6):613–
657, 1986.
10. B. Q. Guo and I. Babuška. The hp-version of the finite element method. Part I: The
basic approximation results. Comp. Mech., 1:21–41, 1986.
April 26, 2016 8:4 WSPC/INSTRUCTION FILE
paper
hp-CGFEM for Elliptic Problems in Polyhedra
45
11. B. Q. Guo and I. Babuška. Regularity of the solutions for elliptic problems on nonsmooth domains in R3 . I. Countably normed spaces on polyhedral domains. Proc. Roy.
Soc. Edinburgh Sect. A, 127(1):77–126, 1997.
12. B. Q. Guo and I. Babuška. Regularity of the solutions for elliptic problems on nonsmooth domains in R3 . II. Regularity in neighbourhoods of edges. Proc. Roy. Soc. Edinburgh Sect. A, 127(3):517–545, 1997.
13. K. Scherer. On optimal global error bounds obtained by scaled local error estimates.
Numer. Math., 36:257–277, 1981.
14. D. Schötzau, Ch. Schwab, and T. P. Wihler. hp-DGFEM for second-order elliptic
problems in polyhedra I: Stability on geometric meshes. SIAM J. Numer. Anal.,
51(3):1610–1633, 2013.
15. D. Schötzau, Ch. Schwab, and T. P. Wihler. hp-DGFEM for second-order elliptic problems in polyhedra II: Exponential convergence. SIAM J. Numer. Anal., 51(4):2005–
2035, 2013.
16. Ch. Schwab. p- and hp-FEM – Theory and Application to Solid and Fluid Mechanics.
Oxford University Press, Oxford, 1998.
17. Ch. Schwab and M. Suri. The optimal p-version approximation of singularities on
polyhedra in the boundary element method. SIAM J. Numer. Anal., 33(2):729–759,
1996.
18. L. Zhu, S. Giani, P. Houston, and D. Schötzau. Energy norm a posteriori error estimation for hp-adaptive discontinuous Galerkin methods for elliptic problem in three
dimensions. Math. Models Methods Appl. Sci., 21(2):267–306, 2011.