SPIKES FOR THE GIERER-MEINHARDT SYSTEM WITH DISCONTINUOUS DIFFUSION COEFFICIENTS
advertisement

SPIKES FOR THE GIERER-MEINHARDT SYSTEM WITH DISCONTINUOUS
DIFFUSION COEFFICIENTS
JUNCHENG WEI AND MATTHIAS WINTER
Abstract. We rigorously prove results on spiky patterns for the Gierer-Meinhardt system [10] with a
jump discontinuity in the diffusion coefficient of the inhibitor. Using numerical computations in combination with a Turing-type instability analysis, this system has been investigated by Benson, Maini and
Sherratt [1], [3], [15].
Firstly, we show the existence of an interior spike located away from the jump discontinuity, deriving
a necessary condition for the position of the spike. In particular we show that the spike is located in
one-and-only-one of the two subintervals created by the jump discontinuity of the inhibitor diffusivity.
This localization principle for a spike is a new effect which does not occur for homogeneous diffusion
coefficients. Further, we show that this interior spike is stable.
Secondly, we establish the existence of a spike whose distance from the jump discontinuity is of the
same order as its spatial extent. The existence of such a spike near the jump discontinuity is the
second new effect presented in this paper.
To derive these new effects in a mathematically rigorous way, we use analytical tools like LiapunovSchmidt reduction and nonlocal eigenvalue problems which have been developed in our previous work
[33].
Finally, we confirm our results by numerical computations for the dynamical behavior of the system.
We observe a moving spike which converges to a stationary spike located in the interior of one of the
subintervals or near the jump discontinuity.
1991 Mathematics Subject Classification. Primary 35B35, 76E30; Secondary 35B40, 76E06.
Key words and phrases. Pattern Formation, Discontinuous diffusion coefficients, Steady states, Stability.
1
2
JUNCHENG WEI AND MATTHIAS WINTER
1. Introduction
We consider a two-component Turing system [25] for which the first diffusion coefficient is constant
(independent of the spatial variable), whereas the second has a jump discontinuity.
Systems with varying diffusion coefficients arise in biological or chemical modeling if a control
chemical regulates the diffusion process of the morphogens in a reaction-diffusion system. Jump discontinuities of the diffusion coefficients play an important role, for example when two different tissues
meet at a border. This border is often initiated by differing genetic expressions.
The effect most studied for reaction-diffusion systems is the Turing instability. For spatially homogeneous steady states, instabilities having an inhomogeneous spatial profile do occur, but spatially
homogeneous instabilities are excluded. The fact that instabilities are necessarily varying in the spatial
variable explains the onset of spatial patterns.
Turing in his pioneering paper [25] initiated this theory, studying a model for cell-to-cell interaction
based on chemicals which he termed morphogens. In a closed spatially extended system for a certain
choice of parameters, small fluctuations, which, for example, could be introduced by noise, are able
to initiate pattern formation in the system. This process was later called diffusion-driven or Turing
instability.
Since the paper of Turing, many reaction-diffusion equations have been introduced to model all kinds
of biological effects leading to pattern formation such as animal skin patterns, wound healing, cancer
growth, embryology, spread of epidemic diseases or genetic signaling pathways [19].
Most of these models use two species of chemicals and spatially homogeneous conditions (constant
coefficients). The main reason for studying these systems is that even in this situation Turing instability
may occur, and in many cases it can be studied analytically. Prominent examples of Turing systems are
the Gierer-Meinhardt system [10], the Gray-Scott system [11], [12] and the Schnakenberg model [24].
For systems with piecewise constant diffusion coefficients, Turing instabilities have been computed
numerically and investigated analytically by Benson, Maini and Sherratt [1], [3], [15], and results on
dispersion relations and typical solution profiles have been obtained. In particular, the authors showed
DISCONTINUOUS DIFFUSION COEFFICIENTS
3
that the spatial variation of diffusion coefficients may produce isolated patterns and asymmetric spatially
oscillating patterns which are not seen in standard homogeneous Turing systems.
Biological applications of these effects include explaining the anterior-posterior asymmetry of skeletal elements in limbs and experimental results on double anterior limbs [15], [36]. The fact that for
asymmetric solutions different peaks may have different amplitudes is a possible explanation for the
common observation that digits vary in length.
Prominent examples for which the genetic basis for the formation of a boundary is well understood
are anterior-posterior (A-P) as well as dorsal-ventral (D-V) compartmentalization in the Drosophila
wing imaginal disc or in the vertebrate brain. These effects have been reviewed in [4], [5], [14]. We
give more details in the discussion section at the end of the paper.
To summarize, including spatial variation of the diffusion coefficients into reaction-diffusion systems
is extremely well motivated by biological modeling and the new effects which are introduced by this
generalization are commonly observed in biological applications.
We give a rigorous mathematical proof of the influence of discontinuous diffusion coefficients on the
qualitative and quantitative properties of spiky patterns in a reaction-diffusion system.
In particular, in this paper we study the Gierer-Meinhardt system [10], which is one of the most
popular Turing systems [25] of activator-inhibitor type. Adapted to our situation, it reads as follows:
2
a = ²2 a − a + a ,
t
xx
h
(1.1)
τ ht = (D(x)hx )x − h + a2 .
Note that h acts as an inhibitor to a, whereas a acts as an activator to both a and h. This motivates
the name activator-inhibitor system. In this paper, we assume that 0 < ² << 1, τ ≥ 0 are constants
and
D1 ,
D(x) =
D2 ,
−1 < x < xb ,
xb < x < 1,
(1.2)
where 0 < D1 , 0 < D2 , and D1 6= D2 . In Section 7 we set τ = 0.1 and in Section 13 we assume
that τ is small enough. We study the equation (1.1) in the interval (−1, 1) with Neumann boundary
conditions
ax (−1) = ax (1) = 0,
hx (−1) = hx (1) = 0.
(1.3)
4
JUNCHENG WEI AND MATTHIAS WINTER
This is the simplest case of environmental variation in diffusivity. It was observed in [3]
that numerical solutions of models with more realistic forms for D(x) give similar patterns
to those computed when D(x) is a step function. Therefore in this paper we focus on the
case when D(x) has one jump connecting two constant values.
We rigorously prove the existence of two classes of stationary spiky solutions to this system: first an
interior spike which is located far away from the jump discontinuity and second a spike whose distance
to the jump discontinuity is of the same order as its spatial extent.
A condition for the position of the interior spike will be derived, namely it can be located in oneand-only-one of the two subintervals. This localization principle for spikes is a new effect which
does not occur for homogeneous diffusion coefficients. Further, we investigate the linearized stability of
this interior spiky steady state and we prove that it is always stable.
Concerning the spike near the jump discontinuity, we will show that generically there are two
possible locations or there is none. Further, our results imply that it occurs preferably if the
discontinuity is located near the center of the interval and if the two diffusion constants differ by a
substantial amount.
Now we mention some previous works on spiky steady states for the Gierer-Meinhardt system with
constant coefficients. Existence and stability of spiky steady states have been studied for 1-D in [13]
and their instabilities have been investigated in [27]. For 2-D the existence and stability of multiple
spikes has been investigated in [31], [32], [33].
Works with spatially varying coefficients include [21], [22] where 1-D and 2-D complex
patterns are investigated, [26] where the 1-D and 2-D motion of a spike and pinning effects
are studied and [20] where the varied behavior of traveling pulses is shown.
The structure of the paper is as follows: in Section 2 we provide some preliminaries. In Section 3 we
present the main results of the paper. In Section 4 we introduce and analyze a suitable approximate
approximate solution to a spiky steady state. In Section 5 we summarize the proof of the stability of
an interior spike. In Section 6 we show the existence of a steady state with a spike near the jump in
the diffusion coefficient of the inhibitor. In Section 7 we confirm our analytical results by numerical
DISCONTINUOUS DIFFUSION COEFFICIENTS
5
computations. We also consider situations not analyzed in this paper, such as multi-spike solutions
or two space dimensions. In Section 8 we discuss our results and put them into the biological
context. In Appendix A (Section 9) we introduce and analyze the Green’s function which
is used throughout the paper. In Appendix B (Section 10) we derive some important
estimates for the approximate steady state to an interior spike. In Appendix C (Section
11) we apply the method of Liapunov-Schmidt reduction to the system. In Appendix D
(Section 12) we solve the reduced problem. In Appendix E (Section 13) we show the
stability of the steady state with an interior spike.
2. Preliminaries
Before stating our main results in Section 3, in this section we introduce some notation and perform
some preliminary analysis.
Throughout this paper, we always assume that Ω = (−1, 1). With L2 (Ω) and H 2 (Ω) we denote the
usual Sobolev spaces.
Since we consider (1.1) – (1.3) for a discontinuous diffusion coefficient D(x) of the inhibitor h,
which has a jump at a point xb , the smoothness of h at xb is lost. More precisely, for classical solutions
D(x)hx (x) is continuous at x = xb and therefore hx (x) has a jump discontinuity at x = xb . To account
for this jump discontinuity of h the function spaces have to be chosen very carefully.
We assume that
(a, h) ∈ HN2 (−1, 1) × HN2,∗ (−1, 1),
where
n
o
HN2 (−1, 1) := a ∈ H 2 (−1, 1) : ax (−1) = ax (1) = 0 ,
n
o
H 2,∗ (−1, 1) := h ∈ H 1 (−1, 1) : (D(x)hx )x ∈ L2 (−1, 1) ,
n
o
HN2,∗ (−1, 1) := h ∈ H 2,∗ (−1, 1) : hx (−1) = hx (1) = 0 ,
endowed with the norm
k(a, h)k22,∗ := kak2H 2 (−1,1) + khk22,∗ , where khk22,∗ := khk2H 1 (−1,1) + k(D(x)hx )x kL2 (−1,1) .
6
JUNCHENG WEI AND MATTHIAS WINTER
The variable w denotes the unique homoclinic solution of the following problem:
00
w − w + w2 = 0
in R1 ,
w > 0,
w(y) → 0 as |y| → ∞.
w(0) = maxy∈R w(y),
(2.1)
0
Note that w is an even function and w (y) < 0 if y > 0. An explicit representation is
3
y
cosh−2 .
2
2
w(y) =
We set
Z y
ρ(y) :=
0
w2 (z) dz.
(2.2)
Elementary calculations give
α :=
ρ(y) =
Z ∞
0
2
w (y) dy =
Z ∞
0
9
y 3
y
tanh − tanh3 ,
2
2 2
2
Z ∞
0
0 2
(w ) dy =
w(y) dy = 3,
Z ∞
Z ∞
0
Z ∞
0
0
w3 (y) dy = 3.6,
w3 (y)ρ(y) dy =
3
w dy −
Z ∞
0
297
= 4.640625,
64
w2 dy = 0.6.
(2.3)
To conclude this section, we study a nonlocal linear operator. We first recall the following result.
Theorem 2.1. [30] Consider the nonlocal eigenvalue problem
R
wφ dy 2
w = λφ,
2
R w dy
Lφ := ∆φ − φ + 2wφ − γ RR
φ ∈ H 1 (R).
(2.4)
(1) If γ < 1, then there is a positive eigenvalue to (2.4).
(2) If γ > 1, then for any nonzero eigenvalue λ of (2.4) we have
Re(λ) ≤ −c0 < 0
for some c0 > 0.
(3) If γ 6= 1 and λ = 0, then
φ = c0
dw
dy
for some constant c0 .
The conjugate operator of L under the scalar product in L2 (R) is
R
w2 ψ dy
w,
2
R w dy
L ψ = ∆ψ − ψ + 2wψ − γ RR
∗
H 2 (R) → L2 (R).
(2.5)
DISCONTINUOUS DIFFUSION COEFFICIENTS
7
Then we have the following result.
Lemma 2.2. (Lemma 3.2 of [34].) If γ 6= 1, then
(
)
dw
X0 := Ker(L∗ ) = span
.
dy
(2.6)
As a consequence, we have
Lemma 2.3. The operator
L : H 2 (R) → L2 (R),
restricted to the spaces
L : X0⊥ ∩ H 2 (R) → X0⊥ ∩ L2 (R),
where the X0⊥ denotes the orthogonal projection with respect to the scalar product of L2 (R), is invertible.
Moreover, L−1 : X0⊥ ∩ L2 (R) → X0⊥ ∩ H 2 (R) is bounded.
Proof: This follows from the Fredholm Alternative Theorem and Lemma 2.2.
¤
3. Main Results: interior spike and spike near the jump discontinuity of the diffusion
coefficient
We consider the case when the inhibitor diffusivity is discontinuous with a single jump,
and derive two types of one-spike steady states:
1. an interior spike located far away from the jump discontinuity of the inhibitor diffusivity (see
Theorem 3.1). For this interior spike we derive a new localization principle, which states that the
spike can exist in one-and-only-one of the two sub-intervals divided by the jump discontinuity. Further,
we show that this solution is stable (Theorem 3.3).
2. a spike near the jump discontinuity whose center has a distance of order ² from the jump
discontinuity, which means that its distance from the jump discontinuity is of the same order as the
spatial extent of the spike (Theorem 3.4).
8
JUNCHENG WEI AND MATTHIAS WINTER
We re-scale Ω² = (− 1² , 1² ) and define u(x) ∈ H²2 (Ω) if and only if u
³ ´
x
²
∈ H 2 (Ω² ), where the norm
of the former space is defined by the norm of the latter, i.e.
kukH²2 (Ω) := ku(·/²)kH 2 (Ω² ) .
In the same way we introduce this re-scaling to the other function spaces introduced at the beginning
of the previous section.
Now we state our first main theorem.
Theorem 3.1. (Existence of an interior-spike solution.) Suppose that the condition
1
1
tanh θ1 (1 + xb ) > tanh θ2 (1 − xb )
θ1
θ2
−1/2
holds, where θi = Di
(3.1)
. Then there exists a steady state of (1.1) – (1.3) with an interior spike for the
activator which is located in the subinterval (−1, xb ). More precisely, we have
µ
¶
x − t²
a² (x) ∼ ξ0 w
+ o(1)
²
in H²2 (Ω),
(3.2)
where t² → t0 ∈ (−1, xb ) and ξ0 /h(t² ) → 1 as ² → 0. The limit position t0 is given by
1
1
tanh (θ1 (2t0 + 1 − xb )) = tanh (θ2 (1 − xb )) .
θ1
θ2
(3.3)
If (3.1) holds then there do not exist any steady states of (1.1) – (1.3) with an interior spike for
the activator in the subinterval (xb , 1).
Remark 3.2. (i) Condition (3.1) of Theorem 3.1 implies that in the case xb = 0, i.e. if the jump
discontinuity is located at the center of the interval, there exists a spike in the subinterval with the
larger diffusion constant D1 (and the smaller θ1 ) but not in the other subinterval. This follows from
the fact that the function tanh α/α is strictly monotone decreasing for α > 0.
(ii) Condition (3.1) combines the effects of sub-domain size and diffusion constant. Hence the
localization effect is due jointly, and favorably, to relatively large subinterval and large
diffusion constant.
(iii) Note that existence of a single spike occurs in one-and-only-one of the subintervals.
(iv) The reverse sign of (3.1) does not have to be studied separately. It follows by reflection about
the center x = 0 of the interval. By this transformation θ1 and θ2 are exchanged and the sign of xb is
DISCONTINUOUS DIFFUSION COEFFICIENTS
9
reversed. An easy calculation shows that the inequality resulting from this transformation is equivalent
to (3.1) with reversed sign.
(v) The localization principle proved in Theorem 3.1 which has been established here for a reactiondiffusion system with a jump discontinuity of the inhibitor diffusivity is expected to play a general role
for reaction-diffusion systems with varying diffusion coefficients. We expect that further investigations
of this phenomenon in the general context will show important new effects which are not observed in
the classical case of Turing systems with constant diffusion coefficients. This should have important
implications for the prediction of localization and asymmetry of patterns in many areas of biology.
We now give a result for the linear stability of the interior spike.
Theorem 3.3. (Stability of an interior-spike solution.) The interior spike established in Theorem 3.1
is linearly stable.
In our second main theorem we establish the existence of spikes near the jump discontinuity of the
inhibitor diffusivity, more precisely at a distance of order ² from this discontinuity.
Theorem 3.4. (Existence of spikes near the jump discontinuity xb of the inhibitor diffusivity.)
(i) If
θ < θ2
1
and
θ2 tanh θ1 (1 + xb ) − θ1 tanh θ2 (1 − xb )
θ22 − θ12 I(L0 )
0
<
<
,
2
θ2 tanh θ1 (1 + xb ) + θ1 tanh θ2 (1 − xb )
2θ1
(3.4)
10.8
there exist exactly two spikes near the jump discontinuity xb . They are given by (3.2) with t² = xb − ²L
for two possible values of L which are solutions of (6.7).
(ii) If condition (3.1) holds and θ1 > θ2 , or if
θ < θ2
1
and
θ2 tanh θ1 (1 + xb ) − θ1 tanh θ2 (1 − xb )
θ2 − θ2 I(L0 )
> 2 2 1
> 0,
θ2 tanh θ1 (1 + xb ) + θ1 tanh θ2 (1 − xb )
2θ1
(3.5)
10.8
there is no spike near the jump discontinuity xb . More precisely, there is no spike given by (3.2) with
|t² − xb | = O(²).
10
JUNCHENG WEI AND MATTHIAS WINTER
In Theorem 3.4 we have used
I(L) :=
Z ∞
L
w3 (y)(ρ(y) − β) dy,
(3.6)
where
β=α
θ2 tanh θ1 (1 + xb ) − θ1 tanh θ2 (1 − xb )
,
θ2 tanh θ1 (xb + 1) + θ1 tanh θ2 (1 − xb )
(3.7)
ρ(y) is given by (2.2), L0 is uniquely determined by ρ(L0 ) = β, and α = 3.
Remark 3.5. (i) We have the following results for the positions of the two spikes given by Theorem
3.4 (i) with respect to the jump discontinuity:
both are positive if
θ2 tanh θ1 (1 + xb ) − θ1 tanh θ2 (1 − xb )
θ2 − θ12
> 0.4296875 22
;
θ2 tanh θ1 (1 + xb ) + θ1 tanh θ2 (1 − xb )
θ2 + θ12
one is positive and the other is negative if
0<
θ2 tanh θ1 (1 + xb ) − θ1 tanh θ2 (1 − xb )
θ2 − θ12
< 0.4296875 22
.
θ2 tanh θ1 (1 + xb ) + θ1 tanh θ2 (1 − xb )
θ2 + θ12
Note that positive position (L > 0) means that the spike is located to the left of the jump discontinuity,
and negative position (L < 0) means that it lies to the right of the jump discontinuity.
(ii) We do not prove stability of the spike near the jump. However, our conjecture is that the spike
at the left position is unstable and the spike at the right position is stable.
We have the following simple nonexistence result for spikes near the jump discontinuity.
Corollary 3.6. Suppose that θ1 < θ2 and
¯
¯
¯ θ tanh θ (1 + x ) − θ tanh θ (1 − x ) ¯
θ22 − θ12
1
b
1
2
b ¯
¯ 2
¯
¯ > 0.4296875
.
¯ θ2 tanh θ1 (1 + xb ) + θ1 tanh θ2 (1 − xb ) ¯
2θ12
Then there is no spike near the jump discontinuity, i.e. a spike with the center satisfying |t² − xb | =
O(²).
Remark 3.7. The criterion given in Corollary 3.6 for nonexistence is satisfied if θ1 and θ2 are fixed
constants which satisfy θ1 < θ2 < 2.37793 θ1 and the jump location xb is sufficiently close to +1 or
-1. This means that we have non-existence if the diffusion constants are sufficiently close to each other
and the jump discontinuity is located sufficiently close to either end of the interval.
DISCONTINUOUS DIFFUSION COEFFICIENTS
11
4. The approximate steady state to an interior spike
We now construct an approximate steady state of (1.1) – (1.3) which has a spike of the activator a(x) concentrating at a point t0 ∈ (−1, 1) \ {xb }.
n
For t0 ∈ (−1, 1), let t ∈ B²3/4 (t0 ) :=
o
t ∈ (−1, 1) : |t − t0 | < ²3/4 . Note that if t0 6= xb , then for ² small enough we have xb 6∈ B²3/4 (t0 ). Set
µ
¶
x−t
w0 (x) = w
,
²
(4.1)
where w(y) is given by (2.1). Let r0 be such that
r0 =
1
(min (t0 + 1, 1 − t0 )) .
10
(4.2)
Introduce a smooth cut-off function χ : R → [0, 1] such that
χ(x) = 1 for |x| < 1 and χ(x) = 0 for |x| > 2.
(4.3)
Setting
µ
¶
x−t
w̃0 (x) = w0 (x)χ
,
r0
(4.4)
then w̃0 (x) satisfies
²2 ∆w̃0 − w̃0 + w̃02 + e.s.t. = 0 in (−1, 1),
w̃00 (−1) = w̃00 (1) = 0,
(4.5)
where “e.s.t.” denotes exponentially small terms. For t ∈ (−1, 1), let
ξˆ0 (t) =
1
,
G(t, t)
(4.6)
where G(x, y) is the Green’s function, defined in (9.1). It can be used to represent a steady state of
the second equation of (1.1) and plays a major role throughout the paper. This Green’s function will
be analyzed in detail in Appendix A. We will mostly drop the argument of ξˆ0 (t) and write ξˆ0 instead.
Set
ξ0 := ξˆ0 ξ² ,
(4.7)
where
µ Z
ξ² := ²
R
w2 (z) dz
¶−1
=
1
.
6²
(4.8)
Then, finally, we choose the first component of our approximate steady state for (1.1) to be
w²,t (x) = ξ0 w̃0 (x).
(4.9)
12
JUNCHENG WEI AND MATTHIAS WINTER
For a function A ∈ L2 (−1, 1), we define T [A] to be the solution in H2,∗
N (−1, 1) of
(D(x)(T [A])x )x − T [A] + A2 = 0.
(4.10)
By standard elliptic theory, the solution T [A] is positive and unique.
For A = w²,t , where t ∈ B²3/4 (t0 ), we choose the function T [A](x) to be the second component of our
approximate steady state for (1.1).
Some error estimates for the approximate steady state (w²,t , T [w²,t ]) are required. They
will be derived in Appendix B and form the basis of the existence proof. In Appendix C we will
reduce the problem to finite dimensions by Liapunov-Schmidt reduction. In Appendix D
we will solve the resulting finite-dimensional problem.
We now discuss some observations about the limit positions of the interior spike by
analyzing (3.3).
For the solution of (3.3) we have t0 → 0 in either of the limits
(i) θ2 → θ1 (for θ1 = const.) (the system approaches the standard GM system with
constant diffusivities).
(ii) θ1 → 0 and θ2 → 0 (the system approaches the shadow system with D = ∞).
The spike connects to the spike in the center of the domain, which is the unique spiky
steady state for constant diffusivities or the shadow system.
(iii) In the limit θ2 → ∞ (for θ1 = const.) we get t0 → (xb − 1)/2 ∈ (−1, xb ). Note that
−1 < (xb − 1)/2 < 0. The spikes moves to the center of the subinterval with finite diffusion
constant D1 of the inhibitor if the other diffusion constant D2 tends to zero.
(iv) Finally, if θ1 and θ2 are such that the inequality (3.1) approaches equality, the limit
position t0 approaches xb .
Note that we always have t0 ≥ (xb − 1)/2 since otherwise (3.3) can not hold (t0 < (xb − 1)/2
implies l.h.s. is negative while r.h.s. is positive).
DISCONTINUOUS DIFFUSION COEFFICIENTS
13
By the above, we observe that we can obtain a single spike steady state centered at any
point of the open interval ((xb − 1)/2, xb ) by varying the diffusion constants D1 and D2 . This
is a new effect which does not occur for constant diffusivities, where the interior spike is
always located at the center of the interval. This shows that for discontinuous diffusion
coefficients asymmetric instead of symmetric spike positions are the commonplace. This
has some important consequences for biological applications, e.g. for understanding limb
development.
5. Stability of the interior spike
We now indicate the main steps of the proof that the interior spike steady state is linearly
stable. The small (o(1)) and large (O(1)) eigenvalues as ² → 0 are studied separately. It is easy to see
that there are no eigenvalues which tend to infinity – we omit the proof of this statement, see e.g. [33].
For large eigenvalues one has to study nonlocal eigenvalue problems. For small eigenvalues one has to apply a projection to a finite-dimensional space similar to Liapunov-Schmidt
reduction. The details of the stability proofs will be given in Appendix E.
6. Spike near the jump discontinuity of the inhibitor diffusivity
We prove Theorem 3.4 on the existence of spikes near the jump discontinuity xb of the inhibitor
diffusivity.
Proof of Theorem 3.4: Let
¶
µ
µ
¶
x − t²
x − t²
χ
+ O(²) in H 2 (Ω² ),
a² (x) = ξ0 w
²
²
where t² is the center of the spike, xb − t² = ²L and ξ0 is given by (4.7). Then we compute an
approximation to the second component h² (x). We decompose h² into two parts:
µ
h² (x) = ξ0 ²h1
µ
¶
¶
x − t²
+ h2 (x) + O(²) in H 2,∗ (Ω² ),
²
(6.1)
where the inner expansion h1 (y) for y = (x − t² )/² satisfies
(D(t² + ²y)h1,y (y))y + w 2 (y) = 0,
h (0) = 0, h (0) = 0
1
1,y
(6.2)
14
JUNCHENG WEI AND MATTHIAS WINTER
and the outer expansion h2 (x) is given by
(D(x)h2,x (x))x − h2 (x) − ²h1 (x) = 0,
(6.3)
h (±1) = −h (±∞).
2,x
1,y
Integrating (6.2) yields
−θ12 ρ(y),
−∞ < y < L,
−θ 2 ρ(y),
2
L < y < ∞,
h1,y (y) =
−1/2
where θi = Di
(6.4)
and ρ(y) has been defined in (2.2).
Recalling from (2.3) that
α=
Z ∞
0
w2 (z) dz = 3
we have
h1,y (−∞) = θ12 α,
Note that (2.3) implies
h1,y (∞) = −θ22 α.
R∞
0
w3 (y)ρ(y) dy
R
= 0.4296875.
α 0∞ w3 (y)
Integrating (6.4) again, we have (up to order O(²) which is included into the error term in (6.1))
µ
²h1
x − t²
²
¶
=
θ12 α(x − xb ),
−1 < x < xb ,
−θ 2 α(x − x ),
b
2
xb < x < 1.
(6.5)
Hence h2 satisfies (up to order O(²) which is included into the error term in (6.1))
(D(x)h2,x (x))x − h2 (x) − ²h1 (x) = 0,
h (−1) = −θ 2 α,
2,x
1
(6.6)
h2,x (1) = θ22 α.
Solving (6.6), using (6.5), we get
h2 (x) =
cosh θ1 (x + 1)
,
−θ12 α(x − xb ) + Aθ1
cosh θ1 (xb + 1)
cosh θ2 (x − 1)
θ22 α(x − xb ) + Bθ1
,
cosh θ2 (xb − 1)
−1 < x < xb ,
xb < x < 1,
Continuity of the function h2 (x) at x = xb gives A = B and continuity of D(x)h2,x (x) at x = xb implies
Ã
0=
D1 h2,x (x−
b )
−
D2 h2,x (x+
b )
and so we have
A=
!
θ1
= A tanh θ1 (xb + 1) + tanh θ2 (1 − xb ) − 2α
θ2
2αθ2
.
θ2 tanh θ1 (xb + 1) + θ1 tanh θ2 (1 − xb )
DISCONTINUOUS DIFFUSION COEFFICIENTS
15
(Note that (3.1) implies
α
.)
tanh θ1 (xb + 1)
A>
Hence
+
D1 h2,x (x−
b ) = D2 h2,x (xb ) = A tanh θ1 (xb + 1) − α = α
θ2 tanh θ1 (xb + 1) − θ1 tanh θ2 (1 − xb )
θ2 tanh θ1 (xb + 1) + θ1 tanh θ2 (1 − xb )
which implies
2
h2,x (x−
b ) = θ1 β,
2
h2,x (x+
b ) = θ2 β,
where
β=α
θ2 tanh θ1 (xb + 1) − θ1 tanh θ2 (1 − xb )
.
θ2 tanh θ1 (xb + 1) + θ1 tanh θ2 (1 − xb )
Finally, we apply Liapunov-Schmidt reduction as in Appendix C to reduce the problem to
one dimension. Following the argument in Appendix D to solve this reduced problem and
determine the position of the spike we get the following solvability condition:
0 = ξ²−1
=
=
Z ∞
−∞
Z ∞
−∞
Z L
−∞
=
θ12
=
θ12
w3 (y)(h1,y (y) + h2,x (t² + ²y)) dy + O(²)
w
3
(y)(−θ12 ρ(y)
ÃZ
L
−∞
µZ ∞
= βθ12
w3 (y)hx (t² + ²y) dy + O(²)
−∞
Z ∞
−∞
+
h2,x (x−
b )) dy
+
!
3
w (y)(−ρ(y) + β) dy +
3
w (y)(−ρ(y) + β) dy −
w3 (y) dy + (θ22 − θ12 )
Z ∞
Z ∞
L
θ22
L
Z ∞
L
w3 (y)(−θ22 ρ(y) + h2,x (x+
b )) dy + O(²)
µZ ∞
L
¶
3
w (y)(−ρ(y) + β) dy + O(²)
¶
3
w (y)(−ρ(y) + β) dy +
θ22
µZ ∞
L
¶
3
w (y)(−ρ(y) + β) dy + O(²)
w3 (y)(−ρ(y) + β) dy + O(²)
since ρ(y) is an odd function.
Hence, for given θ1 , θ2 , β, we need to find L such that
βθ12
Z ∞
−∞
3
w (y) dy +
(θ22
−
θ12 )
Z ∞
L
w3 (y)(−ρ(y) + β) dy = 0.
(6.7)
We recall and summarize that
θ2 tanh θ1 (1 + xb ) − θ1 tanh θ2 (1 − xb )
,
β=α
θ2 tanh θ1 (1 + xb ) + θ1 tanh θ2 (1 − xb )
α = 3,
ρ(y) =
Z y
0
w2 (z) dz =
9
y 3
y
tanh − tanh3 .
2
2 2
2
We now check when condition (6.7) can be satisfied. We need to consider only the case β > 0 which
is equivalent to (3.1). Note that for β = 0 (6.7) is not possible if θ1 6= θ2 and so we do not consider
that case any further.
16
JUNCHENG WEI AND MATTHIAS WINTER
The case β < 0 can be reduced to the case β > 0 by reflection about the center x = 0 of the domain.
This can be seen as follows: by this reflection θ1 and θ2 are exchanged, xb , t² , β all change sign. Note
that the order of the locations of the jump discontinuity and the spike are reversed so that the equation
xb = t² + ²y with y = L changes to −xb = −t² + ²y with y = −L. As a result, (6.7) is transformed to
−βθ22
Z ∞
−∞
w3 (y) dy + (θ12 − θ22 )
Z ∞
−L
w3 (y)(−ρ(y) + β) dy = 0
which is equivalent to (6.7).
We know from Theorem 3.1 that the interior spike solution must be located to the left
of the jump discontinuity. Now we show that generically for the spike near the jump
discontinuity there are two possible locations or there is none.
A necessary condition is
θ12 < θ22 .
Otherwise (6.7) implies
βθ12
Z L
−∞
w3 (y) dy + θ12
Z ∞
L
w3 (y)ρ(y) dy = θ22
Z ∞
L
w3 (y)(ρ(y) − β) dy.
If θ12 ≥ θ22 in the last equation we have l.h.s is greater than r.h.s. which gives a contradiction.
We now study (6.7) in detail.
An important observation is that the integrand of
Z ∞
L
w3 (y)(−ρ(y) + β) dy
changes sign at ρ(y) = β.
The function ρ has the following properties:
ρ(0) = 0,
0
ρ (y) = w2 (y) > 0,
ρ(y) →
Z ∞
0
ρ(−y) = −ρ(y),
w2 dy = α(= 3) as y → ∞
and β satisfies the inequality
0<β=α
θ2 tanh θ1 (1 + xb ) − θ1 tanh θ2 (1 − xb )
< α.
θ2 tanh θ1 (xb + 1) + θ1 tanh θ2 (1 − xb )
(6.8)
DISCONTINUOUS DIFFUSION COEFFICIENTS
17
Thus for all 0 < β < α there is exactly one positive y =: L0 > 0 such that ρ(L0 ) − β = 0. Further,
ρ(y) − β < 0 if 0 < y < L0 and ρ(y) − β > 0 if y > L0 .
To give an explicit formula for L0 , using (2.3) we compute
ρ(L0 ) =
9
L0 3
L0
tanh
− tanh3
= β.
2
2
2
2
From this equation L0 can be uniquely calculated.
Recall from (3.6) that for any real number L we have defined
I(L) :=
Z ∞
L
w3 (y)(ρ(y) − β) dy.
Then
(i) I(L) → 0 as L → ∞,
I(L) → −7.2β < 0 as L → −∞,
(ii) I(L) achieves its unique maximum among all real L at L = L0 > 0, where I(L0 ) > 0,
(iii) I(L) is monotone increasing on (−∞, L0 ),
(iv) I(L) is monotone decreasing on (L0 , ∞),
(v) I(L) = 0 for a unique L = L1 < 0.
Therefore the equation I(L) = c has
two solutions
one solution
no solution
if 0 < c < I(L0 ),
if c = I(L0 ) or − 7.2β < c ≤ 0,
if c > I(L0 ) or c ≤ −7.2β.
(6.9)
Since we assume θ1 < θ2 , for (6.7) only the case c > 0 is relevant. Combining (6.9) with (6.7) and
putting c =
θ2 tanh θ1 (1+xb )−θ1 tanh θ2 (1−xb ) 10.8·2θ12
,
θ2 tanh θ1 (1+xb )+θ1 tanh θ2 (1−xb ) θ22 −θ12
we have
(i) two solutions for (6.7) if
0<
θ2 − θ2 I(L0 )
θ2 tanh θ1 (1 + xb ) − θ1 tanh θ2 (1 − xb )
< 2 2 1
.
θ2 tanh θ1 (1 + xb ) + θ1 tanh θ2 (1 − xb )
2θ1
10.8
(ii) no solution for (6.7) if
θ2 tanh θ1 (1 + xb ) − θ1 tanh θ2 (1 − xb )
θ2 − θ2 I(L0 )
> 2 2 1
.
θ2 tanh θ1 (1 + xb ) + θ1 tanh θ2 (1 − xb )
2θ1
10.8
The proof of Theorem 3.4 is completed.
¤
18
JUNCHENG WEI AND MATTHIAS WINTER
Proof of Remark 3.5: We compute
Ã
!
θ2 tanh θ1 (1 + xb ) − θ1 tanh θ2 (1 − xb )
I(0) = 10.8 0.4296875 −
.
θ2 tanh θ1 (1 + xb ) + θ1 tanh θ2 (1 − xb )
Therefore (6.7) implies that in Case (i) both solutions are positive if c > I(0), which implies
θ2 tanh θ1 (1 + xb ) − θ1 tanh θ2 (1 − xb )
θ2 − θ12
,
> 0.4296875 22
θ2 tanh θ1 (1 + xb ) + θ1 tanh θ2 (1 − xb )
θ2 + θ12
one is positive, the other negative if c < I(0), which implies
θ2 tanh θ1 (1 + xb ) − θ1 tanh θ2 (1 − xb )
θ22 − θ12
.
0<
< 0.4296875 2
θ2 tanh θ1 (1 + xb ) + θ1 tanh θ2 (1 − xb )
θ2 + θ12
¤
Proof of Corollary 3.6: We consider the following two limits. As β → 0 we have L0 → 0 and
I(L0 ) →
Z ∞
0
w3 (y)ρ(y) dy = 4.640625.
As β → α = 3 we have L0 → ∞ and I(L0 ) → 0. For β varying between these two extreme values the
change of I(L0 ) is strictly monotone.
As a consequence we get 0 ≤I(L0 ) ≤ 4.640625 which implies the following necessary condition for
existence:
0<
θ2 tanh θ1 (1 + xb ) − θ1 tanh θ2 (1 − xb )
θ2 − θ2
< 0.4296875 2 2 1 .
θ2 tanh θ1 (1 + xb ) + θ1 tanh θ2 (1 − xb )
2θ1
(6.10)
Again, for β < 0, we can use the reflection argument mentioned before. Then with the
assumption θ1 > θ2 , we get the formula in Corollary 3.6.
¤
Proof of Remark 3.7: There are cases when (6.10) is not true. For example, given θ1 , θ2 such that
µ
2.4296875
0 < θ 1 < θ2 <
0.4296875
¶1/2
θ1 ≈ 2.37793 θ1 ,
then
0 < 0.4296875
θ22 − θ12
<1
2θ12
and so by choosing xb close enough to 1 or -1 (6.10) fails to hold. So in this case there are no spikes in
order ² distance from the jump discontinuity. The proof is finished.
¤
DISCONTINUOUS DIFFUSION COEFFICIENTS
19
A spike approaching the jump discontinuity of the diffusion coefficient is a new phenomenon which
to the best of our knowledge has not been observed, analyzed or discussed in the literature before.
We now discuss the behavior of spikes near the jump in certain limits.
(i) If θ2 → ∞ (and θ1 = const.), we have β → 3. We can re-write (6.7) as
7.2β
θ12
= I(L).
θ22 − θ12
Solutions to (6.7) exist iff
7.2β
θ12
< I(L0 ).
θ22 − θ12
(6.11)
An asymptotic analysis reveals that
e−2L0 ∼ c(3 − β),
I(L0 ) ∼ c(3 − β)5/2
and
θ1
∼ c(3 − β)
θ2
as β → 3. Therefore in (6.11) we have
l.h.s. ∼ c(3 − β)2 and r.h.s. ∼ c(3 − β)5/2
and so (6.11) does not hold if β is sufficiently close to 3. For increasing β at some threshold
β0 with 0 < β < 3 both spike locations L approach the same positive limit which is given
by L0 evaluated at β0 . For β0 < β < 3 the spikes near the jump cease to exist.
(ii) If xb → 1, we get tanh θ2 (1 − xb ) → 0. This implies that we also have β → 3. Repeating
the previous analysis, we get
e−2L0 ∼ c(3 − β),
I(L0 ) ∼ c(3 − β)5/2
and
θ1
∼c
θ2
as β → 3. Arguing similarly as in Case (i), we see that spikes near the jump cease to exist.
In Corollary 3.6 and Remark 3.7 this argument has been made quantitative and explicit
bounds for nonexistence have been derived.
20
JUNCHENG WEI AND MATTHIAS WINTER
(iii) If β → 0, from (6.7) we get
(θ22 − θ12 )
Z ∞
L
w3 (y)ρ(y) dy → 0.
For θ22 − θ12 6= 0, this implies that L → −∞ or L → ∞. In this limit, the spikes at the jump
connect to the interior spikes, which converge to the jump.
(iv) The case when β → 0 and simultaneously θ2 → θ1 := θ requires further investigation.
An example for this coincidence is given by xb = 0. Then (6.7) implies
5.4 [1 + θ(tanh θ − coth θ)] =
Z ∞
L
w3 (y)ρ(y) dy.
This equation has a solution iff
5.4 [1 + θ(tanh θ − coth θ)] <
Z ∞
0
w3 (y)ρ(y) dy = 4.640625.
(6.12)
It is an elementary computation to show that l.h.s. in (6.12) has the limit zero as θ → 0, is
strictly monotone increasing in θ and has the limit 5.4 as θ → ∞. This implies that (6.7)
has a solution iff θ is small enough. Then (6.7) has two solutions L1 and L2 with L1 = −L2 .
These solutions are symmetric with respect to the jump discontinuity.
7. Numerical computations
We now show some numerical computations for the time-dependent behavior of system (1.1). We
choose Ω = (−1, 1), τ = 0.1 and varying diffusion coefficients ²2 . We divide Ω at either xb = 0 or
xb = 0.5 and choose different constants for D(x) on each of the resulting subintervals.
In each situation we present the solution for t = 105 . By this time the computation has come to a
standstill in all cases, and this steady state is numerically stable (long-time limit). For the 1 − D
computations, the first component, a, is shown on the left and the second component, h, is displayed
on the right.
DISCONTINUOUS DIFFUSION COEFFICIENTS
21
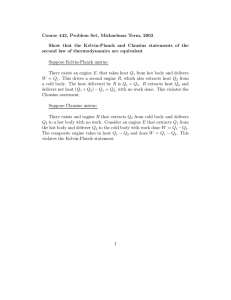
We first plot the initial conditions which are the same for all computations. We study the following
two examples:
Figure 1. Initial condition for a at t = 0: in the first example we take a = 2 − sin(xπ/2), i.e. the maximum
is located at the left boundary. In the second example we take a = 2 + sin(xπ/2), i.e. the maximum is located
at the right boundary. Initial condition for h at t = 0: h = 1 for both examples. Both examples of initial
conditions are investigated for all 1 − D computations which follow.
22
JUNCHENG WEI AND MATTHIAS WINTER
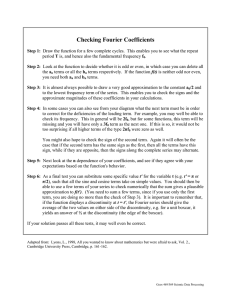
We now show a computation of a spike which either reaches a position near the jump discontinuity
of the inhibitor diffusion (moving in from the left) or an interior position (moving in from the right)
at t = 105 . The spike near the jump discontinuity is located slightly left of it which corresponds to
the stable spike location having L > 0.
Figure 2. Long-time limit of the solution to (1.1) – (1.3) with ²2 = 0.0001 and D(x) = 1 for −1 < x < 0,
D(x) = 5 for 0 < x < 1. The initial conditions are given in Figure 1. We observe a spike near the jump
discontinuity of the inhibitor diffusivity and a spike in the right subinterval. The conditions (3.1) and (3.4),
respectively, are satisfied. Equation (3.3) implies t0 ≈ 0.10336 for the position of the interior spike in
the second example, which is in good agreement with the figure.
DISCONTINUOUS DIFFUSION COEFFICIENTS
23
Doing the computation with the same two initial conditions but changing the jump discontinuity
of the diffusion coefficient of the inhibitor from xb = 0.5 to xb = 0 the result is similar. However,
the limit position changes. In both examples the spike moves to the same interior spike which is
located near the center x = 0.
Figure 3. Long-time limit of the solution to (1.1) – (1.3) with ²2 = 0.0001 and D(x) = 1 for −1 < x < 0.5,
D(x) = 5 for 0.5 < x < 1. The initial conditions are given in Figure 1. We observe an interior spike in the
left subinterval. The condition (3.1) is satisfied. Equation (3.3) implies t0 ≈ 0.01556 for the position of
the interior spike, which is in good agreement with the figure.
24
JUNCHENG WEI AND MATTHIAS WINTER
Now we show the computations for some effects not analyzed in this paper. The initial conditions are
again the two examples shown in Figure 1. We compute the following situation: ²2 = 0.0001, D(x) = 0.1
for −1 < x < xb , D(x) = 0.5 for xb < x < 1 for varying xb . If we decrease D(x) we expect solutions
with multiple spikes. Some examples of this are shown in the following two figures.
Figure 4. Long-time limit of the solution to (1.1) – (1.3) with ²2 = 0.0001 and D(x) = 0.1 for −1 < x < 0,
D(x) = 0.5 for 0 < x < 1. The initial conditions are given in Figure 1. We observe an interior spike in
the right subinterval or two interior spikes in different subintervals. Equation (3.3) implies t0 ≈ 0.33057
for the position of the interior spike in the first example, which is in good agreement with the
figure.
DISCONTINUOUS DIFFUSION COEFFICIENTS
25
Figure 5. Long-time limit of the solution to (1.1) – (1.3) with ²2 = 0.0001 and D(x) = 0.1 for −1 < x < 0.5,
D(x) = 0.5 for 0.5 < x < 1. The initial conditions are given in Figure 1. We observe an interior spike in
the left subinterval combined with a spike near the jump discontinuity or two interior spikes in different
subintervals.
26
JUNCHENG WEI AND MATTHIAS WINTER
We conclude the computations by showing the results of some two-dimensional computations. The
domain is a disc and the diffusion coefficient of the inhibitor jumps along a circle: it is smaller on a
small inner disc and larger on an outer annulus. We observe multiple spikes which are denser and
have smaller amplitude in the region with smaller diffusion coefficient.
In this figure, we display only the activator, a. We give a 2 − D and a 3 − D representation of the
solution at t = 105 .
Figure 6. Long-time limit of the solution to (1.1) – (1.3) in the disc |x| < 2, where ²2 = 0.001 and
D(x) = 0.01 for |x| < 1, D(x) = 0.05 for 1 < |x| < 2. In the inner disc of the domain, where the diffusion
coefficient is smaller than in the outer annulus , we observe multiple spikes which are denser and have
smaller amplitude.
DISCONTINUOUS DIFFUSION COEFFICIENTS
27
8. Discussion
It is seen in the numerical computations given in the previous section that dynamically,
if a spike moves from the left or right boundary, it converges to the closest stationary stable
spike, either an interior spike or a spike near the jump discontinuity. This includes the
possibility that the spike crosses the jump discontinuity and moves from one subinterval
into the other if there is no stable spike at the jump discontinuity.
The numerical computations support the conjecture that one of spikes near the jump
discontinuity given in Theorem 3.4 is stable while the other one is unstable. The dynamical
system seems to select this stable position in the long-time limit. However, the spike does
not stop at the unstable position.
This dynamical behavior is simpler than in [20]. For example, we do not observe rebounding or oscillatory spikes.
Steady states with two spikes (which are possible for smaller diffusion constants) display several
interesting phenomena. Numerical computations show that many combinations are possible, such as
two interior spikes in the same subinterval, two interior spikes in different subintervals or a spike near
the jump discontinuity and an interior spike. We plan to analyze these interesting effects in future
work. In these solutions the two spikes in general have different amplitudes unless they are both located
in the same subinterval.
We now discuss the formation of boundaries resulting form varying genetic expressions. These
results have been reviewed in [4], [5], [14].
The A-P and D-V boundaries in the Drosophila wing imaginal disc and the compartments in the
vertebrate hindbrain are examples of lineage boundaries: they are established because of varying gene
expressions in different compartments, and due to varying adhesion effects only a small percentage of
cells cross the boundary to move into the neighboring compartment. The imaginal disc consists
of a group of cells which form adult structures during metamorphosis. Investigating the
mechanisms of their interaction is crucial in understanding how a larva develops into a
fly. After establishment of the compartments often special border cells are created. They play an
28
JUNCHENG WEI AND MATTHIAS WINTER
important role for morphogenesis by acting as a signaling center which determines the further progress
of patterning.
We now discuss the genetic basis for the formation of a domain boundary in these examples:
• In the A-P Drosophila wing compartment border, the Hedgehog signaling pathway plays an
important role by activating the secreted signaling molecule DPP, which acts as a long-range
morphogen. DPP controls the further subdivision of the wing and formation of extra borders
such as stripes of specialized cells or the wing veins [14].
• In the D-V Drosophila wing compartment border, the Notch signaling pathway plays a major
role. It has been found that the following pathway molecules are important: Fringe
stabilizes the Notch feedback loop at the border ([23], reviewed in [4]). Notch activates Wingless
which acts as a long-range morphogen. It has recently been shown that the Myosin II molecule
which is regulated downstream of Notch signaling accumulates at the border and that it is
required to maintain the D-V border [16].
• The vertebrate hindbrain compartments are formed by signaling of Ephrin receptors which
changes the adhesion properties in neighboring compartments (reviewed in [14]).
• The compartments of the zebrafish hindbrain are well-known lineage compartments. It has
been shown ([7], reviewed in [5]) that boundary cells have migratory properties different from
neighboring cells, a process which is driven by the Notch signaling pathway.
A model which explains the role of boundaries as organizing regions for secondary embryonic fields has
been introduced by Meinhardt [18]. Within this framework, the primary orientation (head to tail) is
determined by positional information [35]. Then, due to the fact that a high concentration of morphogen
is present at the boundary, finer secondary structures are formed. Various biological examples can
be explained using this model, such as the formation of duplicated and triplicated insect legs and the
regeneration-duplication phenomenon of imaginal disc fragments.
The effects explored in this paper such as asymmetric positions or amplitudes of spikes as well as
localization of patterns to a sub-domain play an important role in biological modeling, for example
in the development of skeletal patterns in growing limbs or for compartment boundaries. We plan to
DISCONTINUOUS DIFFUSION COEFFICIENTS
29
shed further light on these issues in the future, combining analysis with computation and applying the
outcomes to various biological models.
9. Appendix A: introduction and analysis of the Green’s function
Let G(x, t0 ) be the Green’s function which is defined as the unique solution of the problem
(D(x)G(x, t0 )x )x − G(x, t0 ) + δt0 = 0, Gx (−1, t0 ) = Gx (1, t0 ) = 0,
D(t )G (t− , t ) − D(t )G (t+ , t ) = 1,
0
x 0
0
0
x 0
0
D(x− )G (x− , t ) − D(x+ )G (x+ , t ) = 0,
x b
0
x b
0
b
b
+
G(t−
0 , t0 ) − G(t0 , t0 ) = 0,
(9.1)
+
G(x−
b , t0 ) − G(xb , t0 ) = 0,
where δt0 is the Dirac delta distribution located at t0 .
Setting
cosh θ1 (x + 1)
,
−1 < x < t0 ,
A
cosh θ1 (t0 + 1)
sinh θ1 (x − t0 )
sinh θ1 (x − xb )
+A
, t 0 < x < xb ,
G(x, t0 ) = B
sinh θ1 (xb − t0 )
sinh θ1 (t0 − xb )
cosh θ2 (x − 1)
B
,
xb < x < 1
(9.2)
cosh θ2 (xb − 1)
then G(x, t0 ) is continuous at both x = t0 and x = xb . Using the conditions that D(x)Gx (x, t0 ) jumps
by −1 at x = t0 and is continuous at x = xb , we get
A
B
1
(tanh θ1 (t0 + 1) + coth θ1 (xb − t0 )) −
= 1,
θ1
θ1 sinh θ1 (xb − t0 )
µ
B
¶
1
A
1
1
coth θ1 (xb − t0 ) + tanh θ2 (1 − xb ) −
= 0.
θ1
θ2
θ1 sinh θ1 (xb − t0 )
From (9.3) we compute
(9.3)
−1
G(t0 , t0 )
−1
=A
=
θ1−1 tanh θ1 (t0
+ 1) + coth θ1 (xb − t0 )
(9.4)
!−1
Ã
θ1
− sinh θ1 (xb − t0 ) cosh θ1 (xb − t0 ) + sinh2 θ1 (xb − t0 ) tanh θ2 (1 − xb )
θ2
θ2 sinh θ1 (xb − t0 ) + θ1 cosh θ1 (xb − t0 ) tanh θ2 (1 − xb )
= θ1−1 tanh θ1 (t0 + 1) +
=: θ1−1 u(t0 ).
θ2 cosh θ1 (xb − t0 ) + θ1 sinh θ1 (xb − t0 ) tanh θ2 (1 − xb )
Setting v(t0 ) = θ2 cosh θ1 (xb − t0 ) + θ1 sinh θ1 (xb − t0 ) tanh θ2 (1 − xb ), we have
u(t0 ) = tanh θ1 (t0 + 1) − θ1−1
v 0 (t0 )
.
v(t0 )
30
JUNCHENG WEI AND MATTHIAS WINTER
Note that θ1−2 v 00 (t0 ) = v(t0 ). This implies for u0 (t0 ) =
d
u(t0 )
dt0
that
v 00 (t0 )v(t0 ) − (v 0 (t0 ))2
(v(t0 ))2
(v 0 (t0 ))2
= − tanh2 θ1 (t0 + 1) + θ1−2
.
(v(t0 ))2
θ1−1 u0 (t0 ) = 1 − tanh2 θ1 (t0 + 1) − θ1−2
Note that
d
G(t0 , t0 )
dt0
(9.5)
= 0 iff u0 (t0 ) = 0 and u(t0 ) 6= 0, since
u0 (t0 )
d
G(t0 , t0 ) = −θ1
.
dt0
(u(t0 ))2
(9.6)
Next we compute
θ1−2 u00 (t0 ) = −2 tanh θ1 (t0 + 1)(1 − tanh2 θ1 (t0 + 1))
+2θ1−3
v(t0 )v 0 (t0 )v 00 (t0 ) − v(t0 )(v 0 (t0 ))3
(v(t0 ))3
= −2 tanh θ1 (t0 + 1)(1 − tanh2 θ1 (t0 + 1))
+2θ1−3
v 0 (t0 )[θ12 (v(t0 ))2 − (v 0 (t0 ))2 ]
.
(v(t0 ))3
Using the relations
Ã
!2
>0
θ1
θ12 (v(t0 ))2 − (v 0 (t0 ))2 = θ12 θ22 1 −
tanh θ2 (1 − xb )
θ2
(by (3.1)) and v 0 (t0 ) < 0, we get u00 (t0 ) < 0. To determine the sign of
d2
G(t0 , t0 ),
dt20
we compute
d2
−u00 (t0 )u(t0 ) + 2(u0 (t0 ))2
G(t
,
t
)
=
θ
.
0 0
1
dt20
(u(t0 ))3
Noting that u0 (t0 ) = 0 and u00 (t0 ) < 0, we get
d2
G(t0 , t0 ) > 0.
dt20
(9.7)
This will imply that the interior spike is linearly stable. The proof of this statement will
be given in Appendix E.
Now we study further properties of the Green’s function G. For t0 ∈ (−1, 1) we consider
G(t0 , t0 ). We define the regular part of the Green’s function as
H(x, y) :=
θi −θi |x−y|
e
− G(x, y).
2
Then we compute
d
d θi
d
G(t0 , t0 ) =
−
H(t0 , t0 ) = − 2∇x |x=t0 H(x, t0 ) =: −2∇t0 H(t0 , t0 ),
dt0
dt0 2
dt0
(9.8)
DISCONTINUOUS DIFFUSION COEFFICIENTS
31
where i = 1 if t0 < xb and i = 2 if t0 > xb . Here we have used the symmetry of H(x, y) and the
notation
∇x |x=t0 H(x, t0 ) :=
∂
|x=t0 H(x, t0 ).
∂x
Further, we compute
d2
G(t0 , t0 ) = −2(∇x ∇y )x=y=t0 H(x, y) − 2(∇2x )x=t0 H(x, t0 ) =: −2∇2t0 H(t0 , t0 ).
dt20
(9.9)
ˆ
ˆ
Note that ξ(t),
which has been defined in (4.6), is in C 1 (−1, 1). We now compute ∇t ξ(t):
ˆ
∇t ξ(t)
=
d
ˆ 2.
(G(t, t))−1 = 2∇t (G(t, t))−1 = −2(∇t G(t, t))ξ(t)
dt
We also need to know the derivative of the function
ˆ
F (t) := (−2∇t G(t, t)) ξˆ2 (t) = ∇t ξ(t).
We compute
∇t F (t) = ∇t
−2∇t G(t, t)
−2G(t, t)∇2t G(t, t) + 4 (∇t G(t, t))2
=
,
G2 (t, t)
G3 (t, t)
which implies that
∇t0 F (t0 ) =
−2G(t0 , t0 )∇2t0 G(t0 , t0 )
G3 (t0 , t0 )
(9.10)
if ∇t0 G(t0 , t0 ) = 0 which will be assumed in (12.7) below.
10. Appendix B: estimates for the approximate steady state
For A = w²,t , where w²,t is defined in (4.9), let us compute
τ := T [A](t0 ).
(10.1)
From (4.10), we have
τ = T [A](t0 ) =
= ξ02
Z 1
−1
Z 1
−1
G(t0 , z)w̃02 (z) dz
·
= ξ02 ² G(t0 , t0 )
=
G(t0 , z)A2 (z) dz
h
Z +∞
ξ² G(t0 , t0 )ξˆ02
= ξ² [ξˆ0 + O(²)]
−∞
¸
w2 (y) dy + O(²)
i
+ O(²)
(by (4.8))
(by (4.6)).
(10.2)
32
JUNCHENG WEI AND MATTHIAS WINTER
Let x = t0 + ²y, z = t0 + ²z̃, where x, z ∈ B²3/4 (t0 ). We calculate
T [A](x) − T [A](t0 ) =
=
=
Z 1
−1
ξ02
= ξ02
[G(x, z) − G(t0 , z)]A2 (z) dz
Z 1
−1
Z 1
−1
[G(x, z) − G(t0 , z)]w̃02 (z) dz
[K(|x − z|) − K(|t0 − z|)]w̃02 (z) dz − ξ02
"Z
=
²2 ξ02
+∞
−∞
·
+²2 ξ02
"
#
−1
[H(x, z) − H(t0 , z)]w̃02 (z) dz
#
θi2
θ2
|z̃| − i |y − z̃| w2 (z̃) dz̃ + O(²y 2 + ²2 )
2
2
−∇x H(x, t0 )|x=t0 y
= ²2 ξ02 P0 (y) + ²2 ξ02
Z 1
Z +∞
−∞
Z +∞
−∞
2
2
¸
2
w (z) dz + O(²y + ² )
w2 (z) dz [−∇x H(x, t0 )|x=t0 ] y + O(²y 2 + ²2 )
P0 (y)
+ ξˆ02 [−∇x H(x, t0 )|x=t0 ] y + O(²y 2 + ²2 )
= ²ξ² ξˆ02 R ∞ 2
−∞ w (z) dz
(10.3)
by (4.8), where
P0 (y) =
Z +∞ " 2
θi
−∞
#
θ2
|z| − i |y − z| w2 (z) dz
2
2
(10.4)
Note that the function P0 (y) is even in y.
For a function A ∈ L2 (−1, 1), let
S² [A] = ²2 ∆A − A +
A2
,
T [A]
(10.5)
where T [A] is given by (4.10). We now set A = w²,t and compute S² [w²,t ]. In fact,
2
w²,t
T [w²,t ]
2
w²,t
+ e.s.t.
= ξ0 (²2 ∆w̃0 − w̃0 ) +
T [w²,t ]
ξ02 w̃02
− ξ0 w̃02 + e.s.t.
=
T [w²,t ]
S² [w²,t ] = ²2 ∆w²,t − w²,t +
= E1 + e.s.t.,
(10.6)
where
E1 =
ξ02 w̃02
− ξ0 w̃02 .
T [w²,t ]
(10.7)
DISCONTINUOUS DIFFUSION COEFFICIENTS
33
Now we estimate E1 , using (10.2), (10.3):
ξ02 w̃02 −1 ˆ 2
ξ − ξ0 w̃0
T [w²,t ] ²
(ξ0 w̃0 )2 −1 ˆ 2
(ξ0 w̃0 )2
=
ξ² − ξ0 w̃0 −
(T [w²,t ] − T [w²,t ](t0 ))ξ²−1
2
T [w²,t ](t0 )
(T [w²,t ](t0 ))
ξ²−1 E1 =
³
+O |T [w²,t ] − T [w²,t ](t0 )|2 ²w̃02
Ã
=
w̃02
(10.8)
´
!
³
´
T [w²,t ] − T [w²,t ](t0 )
ξˆ02 ˆ
− ξ0 − ξˆ0 w̃02
+ O ²2 y 2 w̃02
T [w²,t ](t0 )
ξˆ0
³
´
P0 (y)
= −²w̃02 ξˆ02 R ∞ 2
+ ξˆ02 [−∇x H(x, t0 )|x=t0 ] y + O ²2 y 2 w̃02 .
−∞ w (z) dz
This implies that
ξ²−1 kE1 kL2 (R) = O(²).
(10.9)
ξ²−1 kS² [w²,t ]kL2 (R) = O(²).
(10.10)
From (10.6), we conclude that
11. Appendix C: the Liapunov-Schmidt reduction
In this appendix we study the linear operator defined by
L̃²,t φ := S²0 [A]φ = ²2 ∆φ − φ +
2Aφ
A2
−
(T 0 [A]φ),
T [A] (T [A])2
HN2 (Ω) → L2 (Ω),
where A = w²,t and for φ ∈ L2 (Ω) the function T 0 [A]φ is defined as the unique solution in HN2,∗ (Ω) of
(D(x)(T 0 [A]φ)x )x − (T 0 [A]φ) + 2Aφ = 0,
−1 < x < 1.
(11.1)
We define the approximate kernel and co-kernel of the operator L̃²,t as follows:
(
K²,t := span
dw̃0
dx
(
C²,t := span
dw̃0
dx
)
⊂ HN2 (Ω),
)
⊂ L2 (Ω).
⊥
⊥
⊥
◦L̃²,t .
and study the operator L²,t := π²,t
: L2 (Ω) → C²,t
We also introduce the orthogonal projection π²,t
⊥
⊥
is invertible with a uniformly bounded inverse
→ C²,t
By letting ² → 0, we will show that L²,t : K²,t
provided ² is sufficiently small. This statement is contained in the following proposition.
34
JUNCHENG WEI AND MATTHIAS WINTER
Proposition 11.1. There exist positive constants ²̄, λ such that for all ² ∈ (0, ²̄) and all t ∈ B²3/4 (t0 )
we have
kL²,t φ² kL2 (Ω² ) ≥ λkφ² kH 2 (Ω² ) .
(11.2)
Further, the map
⊥
⊥
⊥
→ C²,t
◦ L̃²,t : K²,t
L²,t = π²,t
is surjective.
Proof: The proof is given in Proposition 5.1 of [34].
¤
Now we are in a position to solve the equation
⊥
π²,t
◦ S² (w²,t + φ) = 0,
⊥
φ ∈ K²,t
.
(11.3)
⊥
⊥
Since by Proposition 11.1 L²,t : K²,t
→ C²,t
is invertible (call the inverse L−1
²,t ), this is equivalent to
⊥
−1
⊥
φ = −(L−1
²,t ◦ π²,t )(S² [w²,t ]) − (L²,t ◦ π²,t )(N²,t [φ])=:M²,t [φ],
⊥
φ ∈ K²,t
,
(11.4)
where
N²,t [φ] = S² [w²,t + φ] − S² [w²,t ] − S²0 [w²,t ]φ.
We are going to show that the operator M²,t defined by (11.4) is a contraction mapping on
⊥
B²,δ :={φ ∈ K²,t
: kφkH2 (Ω² ) < δ}
if δ and ² are sufficiently small. We have by (10.9) and Proposition 11.1
µ°
°
⊥
ξ²−1 kM²,t [φ]kH 2 (Ω² ) ≤ λ−1 ξ²−1 °°π²,t
(N²,t [φ])°°
°
L2 (Ω² )
´
³
¶
°
⊥
+ °°π²,t
(S² [w²,t ])°°
L2 (Ω² )
≤ λ−1 C ξ²−1 δ 2 + ² |∇t G(t, t)| ,
where λ > 0, C > 0 are independent of δ > 0, ² > 0. Similarly, it follows that
³
´
ξ²−1 kM²,t [φ] − M²,t [φ0 ]kH 2 (Ω² ) ≤ λ−1 C ξ²−1 δ 2 + ² |∇t G(t, t)| kφ − φ0 kH 2 (Ω² ) ,
where λ > 0, C > 0 are independent of δ > 0, ² > 0.
DISCONTINUOUS DIFFUSION COEFFICIENTS
35
By the previous two estimates, if we choose δ and ² sufficiently small, then M²,t is a contraction
mapping on B²,δ . The existence of a fixed point φ²,t now follows from the contraction mapping principle
and φ²,t is the unique solution of (11.4).
We have thus proved the following result.
Lemma 11.2. There exists ² > 0 such that for every pair of ², t with 0 < ² < ² and t ∈ B²3/4 (t0 ) there
⊥
exists a unique φ²,t ∈ K²,t
satisfying S² (w²,t + φ²,t ) ∈ C²,t . Further, we have the estimate
ξ²−1 kφ²,t kH 2 (Ω² ) ≤ C².
(11.5)
12. Appendix D: the reduced problem
In this appendix we derive a reduced problem which will be essential for the proof of the existence
results.
⊥
By Lemma 11.2, for every t ∈ B²3/4 (t0 ) there exists a unique solution φ²,t ∈ K²,t
such that
S² [w²,t + φ²,t ] = v²,t ∈ C²,t .
(12.1)
Our idea is to find t² ∈ B²3/4 (t0 ) such that in addition
S² [w²,t² + φ²,t² ] ⊥ C²,t² .
(12.2)
Then from (12.1) and (12.2) we get that S² [w²,t² + φ²,t² ] = 0. To this end, we let
Z
W² (t) := ξ²−1 ²−1
Ω
S[w²,t + φ²,t ]
dw̃0
dx,
dx
B²3/4 (t0 ) → R.
Then the problem is reduced to finding a zero of the function W² (t) in B²3/4 (t0 ).
Let us now calculate W² (t). We have
Z
dw̃0
dw̃0
−1 −1
S[w²,t ]
S[w²,t + φ²,t ]
dx = ξ² ²
dx
dx
dx
Ω
Ω
Z
Z
dw̃0
dw̃0
0
−1 −1
−1 −1
S² [w²,t ]φ²,t
N²,t [φ²,t ]
+ξ² ²
dx + ξ² ²
dx
dx
dx
Ω
Ω
Z
ξ²−1 ²−1
= I1 + I2 + I3 ,
where I1 , I2 and I3 are defined by the last equality.
36
JUNCHENG WEI AND MATTHIAS WINTER
The computation of I3 is the easiest: note that the first term in the expansion of N² is quadratic in
φ²,t and so
I3 = O(²2 ).
(12.3)
Now we compute I1 and I2 . The result will be that I1 is the leading term and I2 = O(²).
For I1 , we have
Z
I1 = ξ²−1 ²−1
Ω
E1
dw̃0
dx + O(²),
dx
(12.4)
where E1 has been defined in (10.7).
We calculate, using (10.8) and the fact that P0 (y) is an even function
Z
I1 = ξ²−1 ²−1
Z
= −
= ξˆ02
R
Ω
E1
w̃02 ξˆ02 [−∇x H(x, t0 )|x=t0 ]y w̃00 dy + O(²)
Z ³
R
dw̃0
dx
dx
´
yw2 w0 dy[∇x H(x, t0 )|x=t0 ] + O(²)
1 Z
= − ξˆ02 w3 dy[∇x H(x, t0 )|x=t0 ] + O(²).
3
R
Using (2.3), we have
I1 = −d00 [∇x H(x, t0 )|x=t0 ] + O(²),
where
d00 = 2.4ξˆ02 .
For I2 , we calculate
Z
dw̃0
dx
dx
Ω
"
#
Z
2
w
2w
φ
dw̃0
²,t
²,t
²,t
= ξ²−1 ²−1
²2 ∆φ²,t − φ²,t +
−
(T 0 [w²,t ]φ²,t )
dx
2
T [w²,t ]
(T [w²,t ])
dx
Ω
I2 =
ξ²−1 ²−1
=
ξ²−1 ²−1
S²0 [w²,t ](φ²,t )
Z "
#
2w²,t
dw̃0 dw̃0
−
+
φ²,t dx
²∆
dx
dx
T [w²,t ](t0 )
2
Ω
Z
Ã
!
2w²,t
T [w²,t ](t0 ) − T [w²,t ]
φ²,t
dx
T [w²,t ]
Ω T [w²,t ](t0 )
Z
2
w²,t
dw̃0
−1 −1
−ξ² ²
(T 0 [w²,t ]φ²,t )
dx + O(²2 ) = O(²)
2
dx
Ω (T [w²,t ])
+ξ²−1 ²−1
(12.5)
DISCONTINUOUS DIFFUSION COEFFICIENTS
37
by (4.5), (10.2), (10.3) since
kφ²,t kH 2 (Ω² ) = O(²).
Combining I1 , I2 and I3 , we have
W² (t) = −d00 [∇x H(x, t0 )|x=t0 ] + O(²),
(12.6)
where
d00 = 2.4ξˆ02 .
Let us for the moment assume that
∇t0 H(t0 , t0 ) = 0 and ∇2t0 H (t0 ) 6= 0.
(12.7)
We will check the conditions in (12.7) at the end of this appendix.
Then the function W² (t) satisfies W² (t) = −c∇2t0 H(t0 , t0 )(t − t0 ) + O(²) for some c > 0.
Thus for ² small enough ∇t H(t, t) has exactly one zero in B²3/4 (t0 ). Further, it has opposite signs for
the endpoints of B²3/4 (t0 ). Since this property is also true for W² (t), by the intermediate value theorem
it follows that, for ² small enough, there exists a t² ∈ B²3/4 (t0 ) such that W² (t² ) = 0 and t² → t0 as
² → 0.
Thus we have proved the following proposition.
Proposition 12.1. For ² sufficiently small there exists a point t² ∈ B²3/4 (t0 ) with t² → t0 such that
W² (t² ) = 0.
Finally, we prove Theorem 3.1.
Proof of Theorem 3.1: We mention the main steps. By Proposition 12.1, there exists a t² ∈ B²3/4 (t0 )
such that t² → t0 and W² (t² ) = 0, or, expressed differently, S² [w²,t² + φ²,t² ] = 0. Let w² = w²,t² + φ²,t² .
By the Maximum Principle, w² > 0. Moreover, by its construction, w² has all the properties required
in Theorem 3.1. The proof is finished.
¤
It remains to check the conditions in (12.7). We assume that
− 1 < t 0 < xb < 1
(12.8)
38
JUNCHENG WEI AND MATTHIAS WINTER
(This condition holds without loss of generality. The case −1 < xb < t0 < 1 follows by
reflection about x = 0 which reverses the signs of of xb and t0 and swaps the two diffusion
constants θ1 and θ2 .)
By (9.5), (9.6) together with (9.7), (9.8) and (9.9), we see that ∇t0 H(t0 , t0 ) = 0 and
∇2t0 H(t0 , t0 ) 6= 0 if and only if t0 is a solution of the equation
sinh θ1 (t0 + 1)
θ2 sinh θ1 (xb − t0 ) + θ1 cosh θ1 (xb − t0 ) tanh θ2 (1 − xb )
=
.
cosh θ1 (t0 + 1)
θ2 cosh θ1 (xb − t0 ) + θ1 sinh θ1 (xb − t0 ) tanh θ2 (1 − xb )
Using elementary algebra, including addition theorems, it is easy to see that this is equivalent to
1
1
tanh θ1 (2t0 + 1 − xb ) + tanh θ2 (xb − 1) = 0,
θ1
θ2
which is equivalent to (3.3). From (12.8), we get
−1 − xb < 2t0 + 1 − xb < 1 + xb .
So a necessary condition for solvability of (3.3) is
1
1
tanh (θ1 (1 + xb )) > tanh (θ2 (1 − xb ))
θ1
θ2
which is the same as inequality (3.1). Assuming condition (3.1), there exists a unique
position t0 solving (3.3). This follows by elementary considerations, utilizing the continuity
and monotonicity of the respective functions.
DISCONTINUOUS DIFFUSION COEFFICIENTS
39
Now it can be shown rigorously that an interior spike located at t² with t² → t0 as ² → 0
does exist if ² is small enough. The proof uses Liapunov-Schmidt reduction and follows
the arguments given in [34]. We omit the technical details.
¤
13. Appendix E: the proof of stability of the interior spike
Proof of Theorem 3.3: In this appendix we prove the stability of the interior spike.
We need to analyze the following eigenvalue problem
L̃²,t² φ² = ²2 ∆φ² − φ² +
A2
2Aφ²
−
(T 0 [A]φ² ) = λ² φ² ,
T [A] (T [A])2
(13.1)
where λ² is some complex number, A = w²,t² +φ²,t² with t² ∈ B²3/4 (t0 ) determined in the previous section
and
φ² ∈ HN2 (Ω).
(13.2)
(Recall that T [A] and T 0 [A]φ² have been defined in (4.10) and (11.1) respectively.)
We first study the eigenvalues with λ² → λ0 6= 0 as ² → 0. The key ingredient is Theorem 2.1.
Because we study the large eigenvalues, there exists some small c > 0 such that |λ² | ≥ c > 0 for ²
sufficiently small. We are looking for a condition under which Re (λ² ) < 0 for all eigenvalues λ² of (13.1),
(13.2) if ² is sufficiently small. If Re(λ² ) ≤ −c, then λ² is a stable large eigenvalue. Therefore, for the
rest of this section we assume that Re(λ² ) ≥ −c and study the stability properties of such eigenvalues.
In (13.1), (13.2) it is assumed that τ = 0. By a straight-forward perturbation argument all the results
also hold true for 0 < τ < τ0 , for some sufficiently small τ0 > 0 which can be chosen independent of ².
We first rigorously derive the limit problem of (13.1), (13.2) as ² → 0 which will be given by a system
of NLEPs. Let us assume that
kφ² kH 2 (Ω² ) = 1.
We cut off φ² as follows: introduce
µ
¶
²y − t²
,
φ²,0 (y) = φ² (y)χ
r0
where y = x/² for x ∈ Ω.
(13.3)
40
JUNCHENG WEI AND MATTHIAS WINTER
From (13.1), (13.2), using Re(λ² ) ≥ −c and kφ²,t² kH 2 (Ω² ) = O(²), it follows that
in H 2 (Ω² ).
φ² = φ²,0 + O(²)
(13.4)
Then, by a standard procedure, we extend φ²,0 to a function defined on R such that
kφ²,0 kH 2 (R) ≤ Ckφ²,0 kH 2 (Ω² ) .
Since kφ² kH 2 (Ω² ) = 1, kφ²,0 kH 2 (Ω² ) ≤ C. By taking a subsequence of ², we may also assume that φ²,0 → φ0
as ² → 0 in H 2 (R).
Sending ² → 0 with λ² → λ0 and x ∈ B²3/4 (t0 ), (13.1) implies
R
wφ0 dy 2
w = λ0 φ0 .
2
R w dy
∆φ0 − φ0 + 2wφ0 − 2 RR
(13.5)
The following result states that the stability for ² small enough is the same as the stability for ² = 0.
Both directions are given by parts (1) and (2) of the theorem respectively. We have
Theorem 13.1. Let λ² be an eigenvalue of (13.1) and (13.2) such that Re(λ² ) > −c for some c > 0.
(1) Suppose that (for suitable sequences ²n → 0) we have λ²n → λ0 6= 0. Then λ0 is an eigenvalue of
the problem (NLEP) given in (13.5).
(2) Let λ0 6= 0 with Re(λ0 ) > 0 be an eigenvalue of the problem (NLEP) given in (13.5). Then, for ²
sufficiently small, there is an eigenvalue λ² of (13.1) and (13.2) such that λ² → λ0 as ² → 0.
Proof: (1) of Theorem 13.1 follows by asymptotic analysis similar to Appendix C.
To prove (2) of Theorem 13.1, we use an argument of Dancer given in Section 2 of [8]. For details on
how to transfer his argument to the Gierer-Meinhardt system, we refer to [33] where it is applied to a
related problem.
¤
We now study the stability of (13.1), (13.2).
We can apply Theorem 2.1 (2) with γ = 2 to (13.5). This implies that
Re(λ0 ) ≤ c0 < 0
for some c0 > 0.
By Theorem 13.1 (1), all eigenvalues λ² of (13.1), (13.2), for which |λ² | ≥ c > 0 holds, satisfy Re(λ² ) ≤
−c < 0 for ² sufficiently small. This implies that A = w²,t² + φ²,t² is linearly stable.
DISCONTINUOUS DIFFUSION COEFFICIENTS
41
¤
Now we investigate the small eigenvalues of the problem (13.1), (13.2), i.e. we assume that λ² → 0
as ² → 0.
For ² small enough, let
w̄² = ξ²−1 [w²,t² + φ²,t² ] ,
h̄² = T [w²,t² + φ²,t² ],
(13.6)
where t² is the point which has been determined by Liapunov-Schmidt reduction.
After re-scaling, the eigenvalue problem (13.1), (13.2) becomes
2
²2 ∆φ − φ + 2 w̄² φ − w̄² ψ = λ φ ,
²
²
²
² ²
2 ²
h̄
h̄
²
²
(13.7)
(D(x)ψ²,x )x − ψ² + 2ξ² w̄² φ² = λ² τ ψ² ,
where ξ² =
1
6²
is given by (4.8).
Our basic idea is the following: the eigenfunction φ² can be represented as
¯
¯
d
¯
a²0 (w²,t )¯¯
.
dt
t=t²
However, there is the following difficulty: note that w²,t ∼ ξ0 (t)w
³
x−t
²
´
χ
³
x−t
r0
´
. So when we differentiate
w²,t with respect to t, we also need to differentiate ξ0 (t) with respect to t.
Let us define
µ
¶
x − t²
w̃²,0 (x) = χ
w̄² (x),
r0
(13.8)
where r0 and χ(x) are given in (4.2) and (4.3) respectively. Similar to Appendix C, we define
0
new
2
K²,t
² := span {w̃²,0 } ⊂ H (Ω² ),
0
new
2
C²,t
² := span {w̃²,0 } ⊂ L (Ω² ).
Then it is easy to see that
w̄² (x) = w̃²,0 (x) + e.s.t.
(13.9)
and
0
h̄² (t0 ) = −ξ²
Z 1
−1
∇t0 H(t0 , z)w̄²2 dz
= −[∇x H(x, t0 )|x=t0 ]ξˆ02 + O(²) = O(²)
by (12.7).
(13.10)
42
JUNCHENG WEI AND MATTHIAS WINTER
Note that w̃²,0 (x) = ξˆ0 w̃0 (x) + O(²) in H²2 (−1, 1) and w̃²,0 satisfies
²2 ∆w̃²,0 − w̃²,0 +
0
Thus w̃²,0 :=
dw̃²,0
dx
(w̃²,0 )2
+ e.s.t. = 0.
h̄²
satisfies
0
0
²2 ∆w̃²,0 − w̃²,0 +
w̃2 0
2w̃²,0 0
w̃²,0 − ²,02 h̄² + e.s.t. = 0.
(h̄² )
h̄²
(13.11)
Let us now decompose
0
φ² = ²a²0 w̃²,0 + φ⊥
²
(13.12)
with complex numbers a²0 . (The scaling factor ² is introduced to ensure φ² = O(1) in H 2 (Ω² )), where
new
φ⊥
² ⊥ K²,t² .
Suppose that kφ² kH 2 (Ω² ) = 1. Then |a²j | ≤ C.
The decomposition of φ² implies the following decomposition of ψ² :
ψ² = ²a²0 ψ²,0 + ψ²⊥ ,
ψ²,0 , ψ²⊥ ∈ HN2 (Ω² )
(13.13)
where ψ²,0 satisfies
0
(D(x)ψ²,0,x )x − ψ²,0 + 2ξ² w̄² w̃²,0 = 0
(13.14)
⊥
(D(x)ψ²,x
)x − ψ²⊥ + 2ξ² w̄² φ⊥
² = 0.
(13.15)
and ψ²⊥ is given by
Substituting the decompositions of φ² and ψ² into (13.7), we have, using (13.11),
Ã
!
(w̃²,0 )2 0 (w̄² )2
h̄² − 2 ψ²,0
h̄2²
h̄²
2
w̄² ⊥ w̄² ⊥
² 0
⊥
+²2 ∆φ⊥
φ² − 2 ψ² − λ² φ⊥
² + e.s.t. = λ² ²a0 w̃²,0 .
² − φ² + 2
h̄²
h̄²
²a²0
(13.16)
Let us first compute
Ã
I4
!
(w̃²,0 )2 0 (w̄² )2
h̄² − 2 ψ²,0
:=
h̄2²
h̄²
i
(w̃²,0 )2 h
0
= ²a²0
−ψ
+
h̄
+ e.s.t..
²,0
²
h̄2²
²a²0
Let us also put
⊥
2
⊥
L̃² φ⊥
² := ² ∆φ² − φ² +
2w̄² ⊥ w̄²2 ⊥
φ − 2 ψ² .
h̄² ²
h̄²
(13.17)
DISCONTINUOUS DIFFUSION COEFFICIENTS
43
0
Multiplying both sides of (13.16) by w̃²,0 and integrating over (−1, 1), we obtain
r.h.s. = ²λ² a²0
Z 1
−1
= λ² a²0 ξˆ02
0
Z
R
0
w̃²,0 w̃²,0 dx
0
(w (y))2 dy (1 + O(²))
(13.18)
and
l.h.s. =
−²a²0
Z 1 2 h
w̃²,0
−1 h̄2
²
0
i
0
ψ²,0 − h̄² w̃²,0 dx +
Z 1 2
w̃²,0
0
(h̄² φ⊥
² ) dx
−1 h̄2
²
−
Z 1 2
w̃²,0
−1 h̄2
²
0
(ψ²⊥ w̃²,0 ) dx
= (J1 + J2 + J3 )(1 + O(²)) by (13.11),
where Ji , i = 1, 2, 3, are defined by the last equality.
For J3 , we decompose
J3 = J4 + J5 ,
where
J4 = −
J5 = −
Z 1 2
w̃²,0
−1 h̄2
²
Z 1 2
w̃²,0
−1 h̄2
²
0
(ψ²⊥ (t² )w̃²,0 ) dx
(13.19)
0
(13.20)
(ψ²⊥ (x) − ψ²⊥ (t² ))w̃²,0 dx.
The following is the key lemma.
Lemma 13.2. We have
µ
2
J1 = −²
¶
³
´
1Z 3
w dy ξˆ03 ∇2t² H(t² , t² ) a²0 + o(²2 ),
3 R
J2 + J3 = o(²2 ).
(13.21)
(13.22)
Proof: Lemma 13.2 follows from the following series of lemmas. We first study the asymptotic behavior
of ψ²,0 .
Lemma 13.3. We have
(ψ²,0 − h̄² )(t² ) = ξˆ02 ∇t² H(t² , t² ) + O(²).
0
(13.23)
44
JUNCHENG WEI AND MATTHIAS WINTER
0
Proof: We compute ψ²,0 − h̄² near t² :
h̄² (x) = ξ²
= ξ²
Z 1
G(x, z)w̄²2 dz
−1
Z +∞
2
KD (|z|)w̃²,0
(x
−∞
+ z)dz − ξ²
Z 1
2
H(x, z)w̃²,0
dz + O(²).
−1
So
0
h̄² (x) = ξ²
Z +∞
−∞
0
KD (|z|)(2w̃²,0 (x + z)w̃²,0 (x + z)) dz − ξ²
Z 1
−1
2
∇x H(x, z)w̃²,0
dz + O(²).
Thus
0
(h̄² − ψ²,0 )(x) = −ξ²
Z 1
−1
µ
2
∇x H(x, z)w̃²,0
(z) dz − −2ξ²
Z 1
−1
0
¶
H(x, z)w̃²,0 w̃²,0 dz + O(²).
Therefore,
0
(h̄² − ψ²,0 )(t² ) = −ξ²
Z 1
−1
2
∇t² H(t² , z)w̃²,0
(z) dz − ∇z |z=t² H(t² , z)ξˆ02 + O(²)
= −∇z |z=t² H(z, t² )ξˆ02 − ∇z |z=t² H(t² , z)ξˆ02 + O(²).
= −∇t² H(t² , t² )ξˆ02 + O(²).
(13.24)
This implies (13.23).
¤
Similar to the proof of Lemma 13.3, the following result is derived.
Lemma 13.4. We have
0
0
(ψ²,0 − h̄² )(t² + ²y) − (ψ²,0 − h̄² )(t² )
(13.25)
= ²y∇2t² H(t² , t² )ξˆ02 + O(²2 y 2 ).
Next we estimate φ⊥
² . We derive
Lemma 13.5. For ² sufficiently small, we have
2
kφ⊥
² kH 2 (Ω² ) = O(² ).
(13.26)
Proof: As the first step in the proof of Lemma 13.5, we obtain a relation between ψ²⊥ and φ⊥
² . Note
that similar to the proof of Proposition 11.1, L̃² is invertible from (K²new )⊥ to (C²new )⊥ with uniformly
DISCONTINUOUS DIFFUSION COEFFICIENTS
45
bounded inverse for ² small enough. By (13.16), Lemma 13.3 and the fact that L̃² is uniformly invertible,
we deduce that
kφ⊥
² kH 2 (Ω² ) = O(²).
(13.27)
Let us cut off
¶
µ
φ̃²,0
φ⊥
x − t²
= ² χ
.
²
r0
(13.28)
Then
2
φ⊥
² = ²φ̃²,0 + O(² ).
Suppose that
2
φ̃²,0 → φ0 in HN,loc
(Ω² ).
(13.29)
Then we have by the equation for ψ²⊥ :
ψ²⊥ (t² )
= 2²ξ²
Z 1
−1
G(t² , z)w̄² φ̃²,0 dz
R
wφ0 dy
+ O(²2 ).
2 dy
w
R
= 2²G(t , t )ξˆ0 RR
²
²
(13.30)
This relation between ψ²⊥ and φ⊥
² will be important for the rest of the proof.
Now we substitute (13.30) into (13.16) and, using Lemma 13.3, we have that the limit φ0 satisfies
R
wφ0 2
w + ∇t0 H(t0 , t0 )ξˆ02 a0 w2 = 0,
2
Rw
∆φ0 − φ0 + 2wφ0 − 2G(t0 , t0 )ξˆ0 RR
(13.31)
where
a0 = lim a² .
²→0
Hence, using the relations
G(t0 , t0 )ξˆ0 = 1,
∇t0 H(t0 , t0 ) = 0,
we can apply Theorem 2.1 (3) with γ = 2, which implies that φ0 = 0.
Finally, we deduce
µ
φ⊥
²
2
= ²φ̃²,0 + O(² ) = ²φ0
¶
x − t²
+ O(²2 )= O(²2 ),
²
(13.32)
which implies (13.26).
¤
By (13.32), we have J2 = o(²2 ).
46
JUNCHENG WEI AND MATTHIAS WINTER
From Lemma 13.5 and (13.30), we have that
ψ²⊥ (t² ) = O(²2 ).
(13.33)
Further,
R
ψ²⊥ (t²
+ ²y) −
wφ0 dy
= −2² y∇t² H(t , t )ξˆ0 RR 2
+ O(²3 ) = O(²3 ).
w
dy
R
ψ²⊥ (t² )
2
²
²
(13.34)
This implies J4 = o(²2 ) and J5 = o(²2 ).
The computation of J1 follows from Lemmas 13.3 and 13.4. In fact,
J1 =
−²a²0
= −²a²0
−²a²0
Z 1 2 ³
w̃²,0
−1
Z 1
−1
Z 1
−1
h̄2²
2
w̃²,0
h̄2²
2
w̃²,0
h̄2²
³
³
0
´
0
ψ²,0 − h̄² w̃²,0 dx + o(²2 )
´
0
0
ψ²,0 (t0 ) − h̄² (t0 ) w̃²,0 dx + o(²2 )
0
0
´
0
[ψ²,0 (x) − h̄² (x)] − [ψ²,0 (t0 ) − h̄² (t0 )] w̃²,0 dx + o(²2 )
= J6 + J7 .
For J6 , we use Lemma 13.3 to obtain
J6
3
³
´
2 ² Z 1 w̃²,0
0
0
h̄
ψ
(t
)
−
h̄
(t
)
dx + o(²2 )
= − ²a0
²,0
0
0
²
²
3
−1 h̄3
²
µZ
¶
2 2 ²
0
3
= − ² a0
w dy h̄² (t² )ξˆ02 ∇t² H(t² , t² ) + o(²2 ) = o(²2 )
3
R
(13.35)
since ∇t² H(t² , t² ) = o(1). Finally, using Lemma 13.4, we compute the main contribution:
J7 =
²2 ξˆ0
Z ³
R
µ
2
= −²
´
0
yw2 w (y) dy∇2t² H(t² , t² )ξˆ02 a²0 + o(²2 )
¶
1Z 3
w dy ξˆ03 ∇2t² H(t² , t² )a²0 + o(²2 ).
3 R
(13.36)
Combining (13.35), (13.36) and using (13.10), Lemma 13.3, Lemma 13.4, we obtain (13.21).
This concludes the proof of Lemma 13.2.
¤
Comparing (13.18) with (13.19) r.h.s. and using Lemma 13.2, (2.3), we obtain
³
´
− 2.4²2 ξˆ03 ∇2t² H(t² , t² ) a²0 + o(²2 ) = λ² ξˆ02 a²0 1.2 (1 + o(1)).
Equation (13.37) implies that the small eigenvalue λ² of (13.7) satisfies
³
´
λ² = −2²2 ξˆ0 ∇2t² H(t² , t² ) + o(²2 ).
(13.37)
DISCONTINUOUS DIFFUSION COEFFICIENTS
47
Arguing as in Theorem 13.1, this shows that since by (9.7) ∇2t² H(t² , t² ) is positive, the small eigenvalue
λ² satisfies Re(λ² ) ≤ −c²2 for some c > 0 which is independent of ².
This fact, together with the results in the previous section, concludes the proof of Theorem 3.3.
¤
14. Acknowledgments
The work of JW is supported by a grant of RGC of Hong Kong. The work of MW is supported by
a BRIEF Award of Brunel University. MW thanks the Department of Mathematics at CUHK for their
kind hospitality. We thank Karen Page for a very interesting discussion on biological modeling.
48
JUNCHENG WEI AND MATTHIAS WINTER
References
[1] D. L. Benson, P. K. Maini and J. A. Sherratt, Analysis of pattern formation in reaction diffusion models with
spatially inhomogeneous diffusion coefficients, Math. Comp. Mod. 17 (1993), 29-34.
[2] D. L. Benson, P. K. Maini and J. A. Sherratt, Unravelling the Turing bifurcation using spatially varying diffusion
coefficients, J. Math. Biol. 37 (1998), 381-387.
[3] D. L. Benson, J. A. Sherratt and P. K. Maini, Diffusion driven instability in an inhomogeneous domain, Bull.
Math. Biol. 55 (1993), 365-384.
[4] S. S. Blair, Limb development: Marginal fringe benefits, Current Biology 7 (1997), R686-R690.
[5] S. S. Blair, Developmental biology: Notching the hindbrain, Current Biology 14 (2004), R570-R572.
[6] F. Brümmer, G. Zempel, P. Buhle, J. C. Stein and D. F. Hulser, Retionic acid modulates gap junctional
permeability: A comparative study of dye spreading and ionic coupling in cultured cells, Exp. Cell Res. 196
(1991), 158-163.
[7] Y.-C. Chang, M. Amoyel, X. Qiu, Y.-J. Xu and D.G. Wilkinson, Notch activation regulates the segregation and
differentiation of rhombomere boundary cells in the zebrafish hindbrain, Dev. Cell 6 (2004), 539-555.
[8] E.N. Dancer, On stability and Hopf bifurcations for chemotaxis systems, Methods Appl. Anal. 8 (2001), 245-256.
[9] B. Gebelein, D. J. McKay and R. S. Mann, Direct integration of Hox and segmentation gene inputs during
Drosophila development, Nature 431 (2004), 653-659.
[10] A. Gierer and H. Meinhardt, A theory of biological pattern formation, Kybernetik (Berlin) 12 (1972), 30-39.
[11] P. Gray and S.K. Scott, Autocatalytic reactions in the isothermal, continuous stirred tank reactor: isolas and
other forms of multistability, Chem. Eng. Sci. 38 (1983), 29-43.
[12] P. Gray and S.K. Scott, Autocatalytic reactions in the isothermal, continuous stirred tank reactor: oscillations
and instabilities in the system A + 2B → 3B, B → C, Chem. Eng. Sci. 39 (1984), 1087-1097.
[13] D. Iron, M. J. Ward and J. Wei, The stability of spike solutions to the one-dimensional Gierer-Meinhardt model,
Physica D 150 (2001), 25-62.
[14] K. D. Irvine and C. Rauskolb, Boundaries in development: Formation and function, Annu. Rev. Cell Dev. Biol.
17 (2001), 189-214.
DISCONTINUOUS DIFFUSION COEFFICIENTS
49
[15] P. K. Maini, D. L. Benson and J. A. Sherratt, Pattern formation in reaction-diffusion models with spatially
inhomogeneous diffusion coefficients, IMA J. Math. Appl. Med. Biol. 9 (1992), 197-213.
[16] R. J. Major and K. D. Irvine, Localization and requirement for Myosin II at the dorsal-ventral compartment
boundary of the Drosophila wing, Developmental Dynamics 235 (2006), 3051-3058.
[17] A. May, P. A. Firby and A. P. Bassom, Diffusion driven instability in an inhomogeneous circular domain, Math.
Comp. Mod. 29(4) (1999), 53-66.
[18] H. Meinhardt, Cell determination boundaries as organizing regions for secondary embryonic fields, Developmental
Biology 96 (1983), 375-385.
[19] J. Murray, Mathematical Biology I/II, Springer, 2002.
[20] Y. Nishiura, T. Teramoto, X. Yuan and K.-I. Ueda, Dynamics of traveling pulses in heterogeneous
media, Chaos 17, (2007), 037104.
[21] K. Page, P. K. Maini and N. A. M. Monk, Pattern formation in spatially heterogeneous Turing reaction-diffusion
models, Phys. D 181 (2003), 80-101.
[22] K. Page, P. K. Maini and N. A. M. Monk, Complex pattern formation in reaction-diffusion systems with spatially
varying parameters, Phys. D 202 (2005), 95-115.
[23] V. M. Panin, V. Papayannopoulous, Fringe modulates Notch-ligand interactions, Nature 387 (1997), 908-912.
[24] J. Schnakenberg, Simple chemical reaction systems with limit cycle behaviour, J. Theoret. Biol. 81 (1979),
389-400.
[25] A. M. Turing, The chemical basis of morphogenesis, Phil. Trans. Roy. Soc. Lond. B 237 (1952), 37-72.
[26] M. Ward, D. McInerney, P. Houston, D. Gavaghan and P. Maini, The dynamics and pinning of
a spike for a reaction-diffusion system, SIAM J. Appl. Math. 62 (2002), 1297-1328.
[27] M.J. Ward and J. Wei, Hopf bifurcations and oscillatory instabilities of solutions for the one-dimensional GiererMeinhardt model, J. Nonlinear Sci. 13 (2003), 209-264.
[28] J. Wei, On the construction of single-peaked solutions to a singularly perturbed semilinear Dirichlet problem,
J. Differential Equations 129 (1996), 315-333.
[29] J. Wei, On single interior spike solutions of Gierer-Meinhardt system: uniqueness, spectrum estimates and
stability analysis, Euro. J. Appl. Math. 10 (1999), 353-378.
50
JUNCHENG WEI AND MATTHIAS WINTER
[30] J. Wei, On single interior spike solutions of Gierer-Meinhardt system: uniqueness and spectrum estimates,
European J. Appl. Math., 10 (1999), 353-378.
[31] J. Wei and M. Winter, On the two-dimensional Gierer-Meinhardt system with strong coupling, SIAM
J. Math. Anal. 30 (1999), 1241-1263.
[32] J. Wei and M. Winter, Spikes for the two-dimensional Gierer-Meinhardt system: The strong coupling case, J.
Differential Equations 178 (2000), 478-518.
[33] J. Wei and M. Winter, Spikes for the two-dimensional Gierer-Meinhardt system: The weak coupling case, J.
Nonlinear Science 11 (2001), 415-458.
[34] J. Wei and M. Winter, On the Gierer-Meinhardt System with Precursors, Discrete Contin. Dyn. Syst. Ser. A,
to appear.
[35] L. Wolpert, Positional information and the spatial pattern of cellular differentiation, J. Theor. Biology 25 (1969),
1-47.
[36] L. Wolpert and A. Hornbruch, Double anterior chick limb buds and models for cartilage rudiment specification,
Development 109 (1990), 961-966.
Department of Mathematics, The Chinese University of Hong Kong, Shatin, Hong Kong
E-mail address: wei@math.cuhk.edu.hk
Brunel University, Department of Mathematical Sciences, Uxbridge, UB8 3PH, United Kingdom
E-mail address: matthias.winter@brunel.ac.uk