. *
advertisement

JUN -121It
DYNAMI
STABILImY
OF HYDRAULIC POPPET VALVES
by
Jens E. Jorgensen
S.B. Massachusetts Institute of Technology 1959
SUBMITTED IN PARTIAL FULFILLMENT
OF THE REQUIREMENTS FOR THE
DEGREE OF MASTER OF SCIENCE
AT THE
..
_.;
...
. ..
.*
/ * .*
MASSACHUSETTS INSTITUTE OF TECHNOLOGY
May, 1963
Signature
. ,;..
of Author:.
Dep
tmenchlnical
Engineering,
May, 193
CertifPied
by:
...
... .
.. ,
.
/'
.. .
. ...
.
Thesis
Supervisor
Chairman, Department Committee on
Graduate Students
ii
DYNAMIC STABILITY
OF HYDRAULIC POPPET VALVES
by
Jens E. Jorgensen
Submitted to the Department of Mechanical
Engineering on May 17, 1963, in partial fulfillment of
the requirements for the degree of Master of Science.
ABSTRACT
Stability criterion for a hydraulic poppet valve
have
been analysed and experimentally verified.
The analysis were based on the linearized equations.
and on this basis a stability criterion for stable
operation of a hydraulic poppet valve as a function of
valve position and upstream geometry was formulated.
The validity of the equations developed were checked
agoainst an experimental
Thesis Supervisor:
Title:
model in the laboratory.
Shihn-Ying Lee
Associate Professor of Mechanical Engineering
i-i
ACKNOWLEDGMENTS
The author wishes to express his sincerest appreciation
and irndebtnessto the following individuals for their contribution towards successful
ompletion of this
roJect:
Professor S.Y. Lee, thesis advisor, for introducing
me to the problem and for his helpful guidance and construct ive evaluations.
Mr. Kermit Harner for his sincere interest in the
problem and constructive suggestions.
Mr. Karl Reid and all other members of the Engineering
Projects Laboratory for valuable aid given whenever needed.
This thesis was supported in part by a Grant in Aid of
the Hamilton Standard Division, United Aircraft Corporation
and sponsored by the Engineering Projects Laboratory at
Massachusetts Institute of Technology.
.1iv-
L-r
i-
T
irL TTRAp\ TO NT S
t a i.
-
oe
;
ont
y ro vo
heorti
l1 stti-
lume
.
Gener:,lized
.a
..ion.
. .
.
i
'?ressure
f'or-e and
vs.
yc ev::tv
m7mW
o iOs s,:o01
lr ....
.
.
sysr em response ....
Dimensionie
.......
ln9me
rT
.-...9
Combinedeffect
1n
ead
vs.
r9!
·KJ
..
................
o...
models .....
b
.....
23a
v ve posit in.
3
30b
ind TR......
Downstream
yt
:omressibi
lde r
........
Stati
oe of resure vnd
t it,svic poe
force
'nd foce
oopetvis.ace
:osition
............pressure vs.
.......... 32b
P ase ag
of presure and orce
v.ive freqency
..........
nd
.
4
1 b
onstant vs. pressure......
ame
.......
..
2-12
com : ressibit
s s,
'3
_-2
g
v':, owen
2-3
- 1i
7h
nstant
oe .......................
n inge
Dimensionless
l: ime....econstant
oTopetv- e oen:ng
... vs.
.ooet
?
o
time
_o peJ v-ie
C6....
12a
&iYstern mode
2-7
e
Sytem de cra?tion
:yt
-4
ia
T=asa
e Ug
fr~equemc,
ofD!essure an d
of
Lo ncd
-7
Expe imentail time Ig
-:
La
vs.
Jfe.ts (summary)..
*force
s.
.
vs.
.,3n
oopet
oasitnL
t
33c
d
Z*lq9
t
..
?f
1 ut t:r
tis
i
t
d.
F ' . u re:
3-
.. se -ead 6 of measure and fore
V I.f e.uency
31L ne
nd P......
4.
I - d e,men
vlve position,
ffecs
onstint
vs
o
(ex· eriten
)
3-q
Lead
3-10
Oytem
3-i_
S.ystem stabiity
vs.
System
stability
vs. valve
j-o
stability vs.
Dynamics
B-
OComuter ogrm
D-!
OrLfice
of
35b
.............
35c
ressu-rIe and disvoiume and
ositon..
1L
osit on .
.
37b
37b
37c
39s
'ine...........
48
schemtic ................ 7
flow coef:ficient Cu vs. Reynolds
i
Nozzle (
Reynolds
Viscosity
65a
.0
o.a90 ° ) flow coefficient
no.
n vs.
....
..........................
b
-00 )flow coefficient Cn vs.
Nozzle ( c
Reynolds
D-4
et
rpar:tus.
B-I
D-3
35
(summay)
k- S hemati2 of
D-2
s.
.-
*
no....
........................
s. tem:e rature .........
o
11
,- i
NQOMENCLATURE
f
-ymnboI
ion and Unit
Descr is..ti
*:re: of the Line L ( n')
A
ar'ea
C7
2oe ff ient of damning (Lbs-sec /in)
j
di,;meter of line L and nozzle di meter (in)
F
poppret forcee (lbs)
f
valve frequency (s)
G
valve
K
spring rate of external sring
K,
ressure gain (ibs/in
oppet flow
3
)
(bs/in)
with disl a cemrent (in 2 /se c
ensitivity
KQ popoet flow sensitivity wiSh pressure (in/l.bs-se
K3
upstream orifice
K4
poppet downstream flow sensitivity
K5
downstream orifice
( n//l
bs- sec)
L
length of line
M
mass of poppet
P
fluid pressure, aiso
of the -poppetvalve
C
:Flow rate
T
time for wave
9o
system upstream volume (in
f ow sensitivity
with pressure (n/lbs-sec
with pressure
(in'/lbs-sec)
volume
flow senS tivity
with
resure
in)
(ibs-sec 2 /in)
through
ressure immediately
the poppet
to travel
(in3 )
;V
fluid velocity (in/sec)
X
valve
disrlacement (n)
)
pstre-m
(ln3/sec)
the length of line L (see)
UI
a%'
-i r
Nomenc I -t-ure
continut-d.
ae
ion nrd
ri:g-t
De s
Symbol
pO(
pet
cone ha lf
ina
UTnit
e (der .)
P
er
c-h.se a, betewee
(0
fluid densit
,P
/3
ffl-uidelasticity (psi)
teLe
nd fore (der.)
ert
)
(s-sec/n
kinenmatic viscosity (inS/se)
R_
VD
3> _
Reynolis no
()
nondimensional valve dislp .cement
A
Av
Au
nondimensional valve displ-.cement
t
valve time constint (see)
60
v:ilve frequency
incremental
D .
dt
(rad/sec)
chinge of
v-,riibie
differential operator
SubscripDts:
o
mean or time -Lverage condition
s
supply condition
v
vive - ref.
u
t ion
ustreamm ond
R
-return condition
I and 2
refers
of a vriable
to poppetvve
to sections
I
nd 2 (adjacent)
TABLE OF " ONTENTS
I.-,'0
INTRODUCTLN......
....
. R
DescriotiGEMonS
A
NO~ENfr
vii
.....
B Bckground
...
1."20
Con lusion
I.0
Recommendations
TAnRT
II
. * *........*
.....
i
4
.......................
ANALY ITS
S
2.00 introduction..................
-.0 Model and 'ystem descriotion ................
2.20
Static charcteristics
nd s
tbiity........
0.
!0
..
.
'2.30 Dynamicstabilty.
?.40
2 .5'*0
the
onoet .........
10
?.31
Forces
2.32
General stability considertions ....
on
Compressibiiity model ......................
.
41
Dynamic
1
Stib
-
12
16
quation
......................
t
y
*19
.
..
Inertia
model....................
tion
i51 D rnam~c
c--u
.o.......20..
'.-
otabi
.i y..
.....
12
.T
" on:-nt s
I'
orin-nued.
...
2
mbned
;,.s
.
. ......
efes
·
DiDynami - e q u,a
tt
s····*·,··*···*
re·*r···re·a···b
2 3
.
round
*
*
*.
'ha.
f
'C
P~
i56
i t i.i..
.t.
·
·
·
·
·,r·d·····,·*,
e90
·*8*··*·86·
RTTTT
r ment
Exe
,..
Re
.ulS
-
·
·
·
·
,····r·········
·
*····r··+··O··r,
)
0nO
n~ , g
B
,::,
D:
.0
.
yr
3......w
C, cb
Dyna-ii
3.2!
3 -
qi
o,::
> )tir
.
@
t.j
Ir
..
.
bt.
. .·
.··,r···r,······
.
·
'
,
-
t'
-ssbity .....
^,>R
e uit s ...............
,
osIA
R
Discussion
-.,L
.l
i
·
·
·
·
'2
,,·e·,···r
*········,···
·
L
·
·
·
·
·
·CI·rJ···rc
· ·
.............
r
·
,
·
inert:. iam
effec s
·
·
+ ·
-J
, *
· ··
* ·
,
·
o ,
·
36
"~_.:
k
34
····r·*··*r
Df''
·
·
,a
*····r*r·rr·,···
. n,
·
.30
'tabiility
.
ti
p.3? Combi'ned =fgc.
····*··,·r···
·
b*·*·····*··*··
·
·
·
34
,··a,,·+r+·r··
.....
e*r·····rl·r····
s..
·
·
·
+··········*···
.3-3 Downsitream
e fec s-,
APPENDIX
·
,s*r·rr·*r··r··r·r*
3.31 Simrli fid model- ..
B- Inertia
... ...
·
·
*,··***·····
.
A.JOJO~OO~l~O~Oo~OOO~O·oOOOOOJ600dOO~JOO0
..i acoa' ? . .us . nd cro c
xevri ment
T-..
t us
edur
e.
39
o
li-I
- ,
-.-Ie o , - 0rcr.
i
J. A L, " -
,-Vi
'L
~/~.oL
~
l
ort I ueJ .
.1
. -i &-)
s
b3
.. e
··
·
·
or ob
?o e du r,
· .·
·.
,
o
·
·
· o
e
®
®
i
®
·
*
·
·
®
4, *
·
t
r
and F v.
inn
h k ng
Prc-e u re, f,or
.
b 1i Aty
c:
B
APEND.X
~lrrneaia. tion
. ...tecniq~ ~°
s of . iin&.. ...
B- Dynan
_- ,:2~t.bi t y rndRouth
44
·
'
47
V~i-
L...
i:!
I- %
P-4 Noni near.,3 or umer
ogrlr r... .
A?\ NDIX 2
Extension
.:
.
r.
of Analiyis .
.
56
,81-
Inertia
1
astream
res triction.
model with
·.-2_t Comined e.feet- s models ...
PAfPENDIXD:
-:PTPENDI:X R
Re
? e 'ence s . . ......
..
.,~
--nd constants .....
Flow coeffic ients
~ ~-e
·
~
1
·
·
·
·
b.
.............
~
e
·
®
l
l·
64
L.1
Part I
1 .10
Introductiorn,Conclusions and Recommendations
Introduction
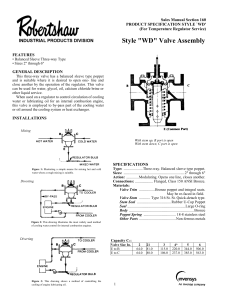
A)
Desc riton
A opet
s a seating type valve
valve
where
valve member, poppet, has
a relative motion
to its seat.
of a poppet
Figure i-I.
A schematic
the
erDendicular
valve is
hown in
The design principle is simple in that
the fluid forces on the poppet are balanced by an
externally applied orce, usually a spring force, and
fluid
s allowed to escaoe.
This type of device has extended use in high erformance hydraulic systems as regulators,
relief
valves or
hydraulic amplii.f'iers.
Major advantages with the poppet type valve is
of manufacture,
.eakage and insensitivity to dirt.
low
The major problems
iitsease
arise in dynamic
stability.
The valve
member itself is basically a mass spring system with little
or no external damping and therefore oscillatory.
Any
additional flui.d forces in hase with the valve velocity
will lead to rapid
Cscillations
unstable
o
th s
oscillations.
ype not only degrades the vaive
performance, but when sustained will1destroy the valve.
The purpose
the cause of hi
of this
investigation
Instability
oceration wrhere they exist.
and sow
s to determine
lits
of stable
0.
J
;f
QL
Q
II
II
I
_0
I
I
I
I
I
I
I
I
I
I
I
I
I
Poppet
valve.
I
I
I
I
I
I
I
_
_
_
F
Q,- Supply flow
Qz- Load flow
Q - Relief or poppet flow
FP- System
pressure
POPPET
I
VALVE.
I
FIGURE 1-1
II
Qo
.Ba
..
g-...ound
Previous Lnvestg' tion on stabil
valves h- s been done
n sl.ding
spston
ty of ydra ul
: nd
ype vai ve .
Lee
nd 3lackburn
(Reference
)
nave shown that
transient valve forces
my cause nstabilitty.
by Stone
of poppet valves was investigated
ot.abilLty
(Ref.#2)
Static
and dynamic studies
on
neum ic fla-rpertype
valves have been c:rried out. (Ref.,3,4
nd 5)
In-
vestigations by Ainsworth (Ref.#t6)pointed out that the
fluid delivery line interacts with a valve to cause instability,
by
n investigation extended to the pop)et valve
unk (Ref..#7).
The result here is that the critical
he
system
iS the fi st;
hnrmonic
frequency
of the delivery
n
line
higher th,'nthe natural frequency of the valve.
in interestlng
shows
derivation by Frendenreich (Ref./#8)
that a spring loaded relief valve regulating a
consta nt flow is stabilizzed by the transient
orces
created due to the change in volume by the poppet motion,
but will
become
nstabLe
due to elaisticity of the'oil.
In this invest-i ation the stabil ty of the
itself will studied, rather than
srtabilitydue to inter-
:.ctionwith other elements of . system as
ixE.
.I-
br~
r·ls~ -
~,
f`~~fe~ne
vlve
this
is one steo
-,-
furtlse
:rremoved.
Assumptions will
been made as to the
e:onfigurat" on to be studied,
lnd
catin
made
articular
and an ana 1 -is will be
he sstem chracterrisstics and stability
epending on the pnhysiai characteristics.
The model to be studied will
of fluid
nertia
include the effects
nd compared with
and compressibii.itT
experimental resuits.
The analysis is
resented in Part II and the
experimental results in Part III of this thesis.
1 .20
Conclusion
This invest^gation has lead to
better understanding
of the basic problem of poppet valve stabiilty.
The major fluid
orces acting on the poppet valve
are due to the fluid pressure.
These pressure forces
have components n the drection
of the velocity and
may stabilize
or unstabilize
the valve.
shownthat the fluid eiastcity
It has been
contributes an unstabilizing
force in the direction of the valve velocity and acts as
a negative damping, where as the inertia forces associated
with fluid acceleration have stabilizing components opposing
the valve velocity
and hence acts as
The effect of fluid
ositve
e lasticity was by
damping.
ar the largest
-4-
f actor Ln theh cause
of Lnstability.
The stabilizing
component due to inertia
decre.sed due to frictional
The system
nalysis
nonlinear differential
Ls also
losses in the fluid flow.
was made by linearizin
uations
the
predictions
:nd
were
m,-dewith r-espect to system performance.
limit for stable valve operation was derived
A
and the experimental results verified the validity of
the euat ions.
This study was only concerned with the condition
upstream of the valve,
but extension of the analysis
to include the downstream effects are possible.
. 30
Re commendat ions
Based on this investigation the following recommendations
are made.
They are categorized
in the two
groups, Experimental and Design Analysis.
A.
Experimental
Further data could be needed to extend the theory
to some of the models
not considered
A more important study cn
here.
be made on the stability
due to the downstream fluid momentum effects.
re;ted
-round
o the
;the
Studies
ressure distribution and flow p-attern
ocpetwhen confined in a narrow downstream
chamber will
be imortant,
and qualitative information
is lacking
B.
Design nalysis
The nonllnear equations
that describe this system
can easily be studied on a analog computer.
on
A sudy
he nonlinear characteristics could give more accurate
information on valve stability, esnecially in the region
of small valve openings or large disturbances.
A computer aided design would also reveal information
not now available to the designer in the form of graphs
and diagrams relating system stability and valve performance as function of the physical parameters.
Part II.
2.00
Analysis
introduction
The main task of this analysis is to conceive a
meaningful mathematical model and define the p-oblem.
By
breaking the system down into basic components and investigating each,
it is hoped to gain insight to the nature
of the
stability.
The basic components are then combined and the overall
system stability studied.
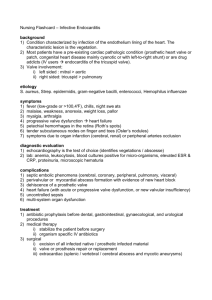
2.10
Model and System Description
A- general schematic of the system is shown on FFigure
2-a .
It s comrised
of a constantustream pressure
-3 -
Ps, an
u st,rea
restr iton
Au, a deivery
Iine L, and
the system vol ume o terminated by the poppet valve.
The
poppet va ve s desc.ibed by the motion x and ts correspond-
The downstreamconditions are assumed
ing valve area 'v.
constant
and
The fluid
(3
n the analyss
PR is ~rbitrarily
s characterized by its density
(psi).
of this nature
A system
set to zero.
and elasticity
can be looked upon
as distributed or lumped parameter system.
The analysis
model a
ere will based on tlhe lumed
arameter
this will yield the most information.
The borderline
between
the two cases is aoroached
when wave transmission due to valve motion becomes
important.
The time T for a wave to travel
the distan ce
L is given by
T L;
and the particular
given as t.
(1)
tme constant for the systemrrmay be
Our criteria then becomes
7< t
(2)
and for a line -it will be shown later that t
so that we have
(3)
F?
A iS th-
weere
L.izne
ree
assume ere that Q.suat on (3) is vail d.
ment.- (Re f.9)
experi
f luid f'orac
on the
sure forces.
estbl
DwJas
ised
We
From earlier
major
the
th1at
oppet were contributed
by the pres-
t sk Lhenbecomes to caicuiate
The first
these presure
forces, and to make the ainalysis easier
models
two basic
it
1
flow.
.mean
are
first
considered,
nd shown on
2-1 b and c.
Figure
Compressible Model
Inertial effects
are assumed negligible and the
by tneorifice Au, the poppet valve Av s
system is described
system volume 2to and the fluid
Inertia
nd
and
Model
The volume
incom-ressible.
orifice,
ropperties /f
valve
%ois
assumed small and the fluid is
System is described by the line L,
nd the luid density p
The total system is then described by these combinations
in a combined model later, which will be the representation
of the system as shown on Figure
Before the actual
c-irried
out,
stability
2-1.
nalysis on -he secific
generai description of
will be cons idered.
models
the forces
nd
are
-
i,
L
I-'
General System Schematic.
(A)
-
Ps
Compressibility
(B)
Model
Inertia Model
(C)
SYSTEM
---
--
DESCRIPTION
Fig. 2-1
.
-
i,,,,
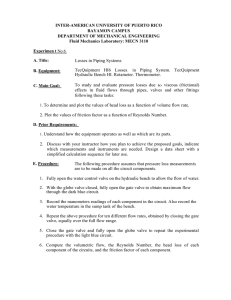
2.20 Static C,,.c
a
ers tieCs and Stbility
Evaiuation of the tatic
forceis done by a)pplyng
the momenturnm
equation to the control
Figre
(-
v oume
shown on
,-f
o
F
(ZVZsJ
eZrJ
Relating the velocitles
use ontinuity
to the
(4)
--
.;agnation pressure and
equation for the control] volume gives:
6= ---
(6)
where the dimensionless valve displacement is defined
only between
o
S
/
-
Two variations of equation (¶) exist,: ifP
he system
(7)
employs an upstream.:rflce or not.
Without an upstream orfice, Po =
faced
P
and for a flat
oDDoet CaO)
F- p . (/-b'9
(s)
The satic force is seen o ncrease with displacement, so
the oppet must be restrained by an external spring of rate
K.
,4
xp
Pv
0
0
I
I
I
'
I
r
T5
V
-
sI-
-
-
V2 P
I c-
I
0(_ L - _l
_
I
h x sin
*.r
SYSTEM CONTROL VOLUME
FIGURE - 2-2
0
K (2a7')8
(9)
to nsure st<atic stabil
ty.
For
he
case wne!--; the system have an upstream
orf ice of area Av the flowcontinuity gives
Fa
_
I
(10)
(Io)
.P__=
L
1
where
Substituted
into(5) for aflat faced poppet this gives
F
I
Fwhere
thessumpon
is made
t
hat
and
where he assumption is made -that
Cd yS23 and
Fo = Ps.,A This result
is plotted
on Fignare 2-2.
and since the force now decreases with displacement the
system
is statically
stable and with a hydraulic spring
rate
Ks=
-'2E7OD)p5 +
.-
Figure 2-3 :iso shows
vari.tion
in
(13)
he response to a slow sinusoidal
the v ve displacement.
Z)
)
cJ
c
Csj
>0
0
>0
0)
V%-
-Q
vftft;
c)
LC)
OaJ
Q.
...
FIGURE
2-3
-lThe response
s seen to deuend not only on the
operating displacement x
but also on the amplitude
Large amplitude represented by curve
of the valve.
(I) is seen to
ve
noninear
(2) gives a linear operation.
output
where as curve
Operation at small valve
neutral position wil alsogive nonlinear operation
regardless of amplitude.
This analysis is most concerned with the linear
operation because by linearizing the differential
equations analytic solutions may be obtained, where as
graphical or comuter
the nonlinear
2.30
techniques must be employed in
case.
Dynamic Stability
In this
stability
section
a general
will be given.
presentationof system
The system is assumed statically
stable and the major consideration is given to linear
operat ion.
2.31
Forces on the Popepet
The momentum equation used on the control volume in
Figure 2-2 for the dynamic case yields:
(Ae PZ)4 - F (m
ev
-ptq
VPZAVCO3OC
(14)
-11-
Eiuation (14) as wrirtten assumes that Pr is
everherp
hre
boundary
downstream
and fluid is carried
only by the fluid jet.
complexity
of the downstream
and vorticitj
constant
across
This leaves
the
out the
"low patternwere turbulence
in generalcomplicates
t e
.icture.
Considering a flat poppet only and assuming that VlcA
V2
the momentum equation leaves only pressure force and
external force to balance the momentum change within
the control volume.
evaluated,
The poppet momentum is easily
but the momentum
of the oil is more complicated.
The assumption is made that this is small as previous
experiments indicates this.
analysis).
1/9 for
(See Ref.
detailed
The momentum equation then reduces to the
simple form if P2 is
constant and arbitrarily setto
zero, and pressure immediately upstream of the valve is P
PA - F MX
(1)
M is the Doppet mass and F the external
force.
This then shows that the major fluid force is the
pressure
force actinrg on the poppet.
The pressure
P
can be derived analytically or determined experimentally as
functions of system parameters.
here
o
Both methods are employed
- i 2.-4
ra1
e:ne
_
Ti
e
orc
dration
on dsi
y
on te
(15)whirh w2rliten
pop3 t Ls described
for
by equation
system shown on Figure
n
... i,
yiedas
F- KX--
P
In
(15
)
I" nearized form where the motion x is
some oint
iven abott
xo we have
x
x0
o
AX
F = F+ AF
that
P S Po+ A P
where it
Fo= 7o
.
(z:). - X-,-This equation is shown
for a free vibration
Let us look
(F
is specified
'his
Tives
M,- C'- o
(17)
n the vector diagram on Figure 2-4
0).
at the physics of the system first.
With the fluid incompressible and inertia effects neglected
the fluid pressure behind the -poppet P is given by the
instantaneous position of tihe oppet.
Forthe free vibration
this
is shown on Figure 2-4 where x vlbra.tes
the or,'-ire
var.es
about the mern -res.ure
about x and
po, given by
curve a, but opposite of the motlon x, so it acts as spring force.
'The net work done by the fluid pressure
t~he opopet is here zero, as when t he p.D-ool-et
moves
on
nward
from
I..,.
Q0
A (0-)= -G(jeo)
r
C
Nuo\\\
X sinwt
I
(AP)A-KX- CX- MX=O
I
I
.AX
I
X= X; AXsinot
AP
P= @- APsinot
lertia)
,0~
)
)mpressibility)
GENERALIZED SYSTEM RESPONSE
FIGURE. 2-4
I--~~~~-U. 9
lI"U-a"
-
B to D the me-n oressure in
D
- F the mean
gains nor loses
pressure
and .for the outward motion
s again
po.
The
oppet neither
nergy fromthis component of pressure.
Clons-iderfirst the effect of inerSia, and use the
suoer ooswit;on rinciple, as the inertia effect will
modiy the existin : Dressure.
As the valve moves outwards, the flow ncreases
and the resulting fluid acceleration further decreases the
pressure.
On the nward motion the flow decreases and
the retardation of the flow increases the pressure further.
This gives rise to the additional pressure P1 shown in
(on Figure 2-4)
maximum at c.
which
has its minimum at position A and
The total
ressure is now given by op
(shown vectoriaily as (P A)
on Figure 2-
p1
) but as p does
not clontribute any net energy to the system, we need
only consider p.'
the mean
When the oppet
moves from B - D
ressure is greater than for the outward motion
from B -
so that the net work done by the poppet is
negative.
The
pressure p
depends on the velocity and
opposes it, so it acts as a postive
damping in that the
fluid gains energy from the motion,
nd stabilizes
i.
The component in the direction of the velocity of (P A)'
on Fi ure ?-4
s then
p.
NText ens. der the effL t of
o omree"s _billt only.u
-
apacity modifies the original
again, this addedstorage
s te
press-ure shown in a .
- ....the flow exce ed s h
di ly droos w
s.tea
e
;copet moves outward trom
mn
mnd
te
motion
on the inward
?
The additional
has a minimumat c
pressure due to the compressibility
and maximum:zt A and 2, so the total
?-4)
pressurei
as (
(This 2s shown veotoT-.lly
Again we consider
seasure
the flow is
less then the mean and the oressure rises.
+ P
4-
s now
) on Figure
the work done by pp only.
poppet moves from B - D now it
sees a mean pressure
As the
less
Po and for the outward motion is !rger
work done by the fluid on the -s
than po so the net
Again the
ositive.
pressure p depends on and is in the direction of the
velocity. This is an unstable vi-bration, as once started
the fluid pumps energy into the 'system and the vibration
increase s.
If the effects of compressibility and inertia are
combined it depends on the vectorial.
sum of the three
pressure forces if the resultant is to have a component
in pase or out of phase with the velocity.
Mathematically this will be exorressed by equation (17)
combinedwith the equation for P f(x) that wi11 be
deveiooed later.
Assumethis function is of the form
of a genera] diferen;al
equation
a() -6(D)
(
Combi.rnedbwith
equation
A tF )=
(17) this
ives
/
\H< *CD *K -#46D0)
which when examined for stability
gives the frequency equation
/MD +CD+K.,, 6(D)~ x 9 0
where jA
(19)
(20)
will be substituted for D.
Assume further that the general solution for G(D) i
of the
form:
4(D) DDzco
t
RoD+(21)
,
Substituted into 2D it gives a general fourth order
vibration equation.
/,"/I
. D*'-,
(1 cR.
:C
) ++( c K.
,qz, ( ,s,)
4c'C
6A3,)
# (C 4- )jkRo
The stability of thiis equation is given by the Routh
criteria (See Appendix B-3)
and will be discussed in
detail, as the various forms of G(D) are developed.
(22)
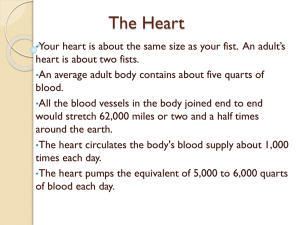
2.40
Compressib
.41
I
ity
Dynami Euation
n
Sthisse ion
the analysis wll
be made of the
adooted model b"y considering the e lastic propertes
'he
ui.d.
of
The system under consideration s shown in
Figure (2-'a)
The system consists of an upstream orifice (Au),
the
volume
valve (AV) and assumes
VO, and poupe,
PR constant, density
e and comprssibility
Csand
(3.
9(as ()
System eqn's:
Q
%(%o)
)
L/
Qs=
RAL
02
P;
(24)
(2)
-P
(26)
As is evident, these equations are nonlinear by the
nature of the flow, so we are going to cons-ider their linearized
.orm.
We shall onsider motions
round
operat-ng oint
of
he
.orresondinr'
-pope, wi tlh
~v~e
flows and pressures
=n
p ~ ~,
The bove operations
~ ~:etc,
akes the form (Ref. Appendix B-L)
then
Os-Q= 'DP
Q's= -
(27)
3 P
(29)
where the variables
now denote changes f rom the mean,
and D is the linear differential oerator d/dt and Ko
and K are the flow sensitivity coeffic ients wth respect
the flow sensitivity with resoect to
to ressure and K
i
valve oosit on.
These equations
solved for p vs. x give
2
o
__
ar:
3(,+,)
__
I3
_
'L1~~~~~(L~~~i+~~C~~C
Jv+ i]
(30)
(
w he re
(33)
Z/3(K3 ÷ K)
Equation (3i) describes the desired pressure variation
nd as expected itis
wit:h poppet posi tion,
a simple
with a time constant 0 promortional to the voume
I.-g
and
By
inversely pro-oortional to the flulielasticity.
the vaLues for Ki,, K2 nd K3 as functions of
introducing
geometry (Ref. Appendix -1), we can further
(32) and (33)
educe equations
to:
2 770
,a=~~i~l
(34)
Xs-I1
(3
g7
)
Introduc in a system comrl iance z given by
and the 'break frequency
,. = I
nd
=
z.''
(35)
gP
YZc=Z
r, iven
I
by te
so
Z.
r
-rt
rela tions
(- N
weh~ve
I:';ar~lrrii~ti
31a
i
and the function
piotted
on Figur>e'-t;*
The minimum ooint for
i
given
1s by
which ive
mn,,= 2.60
.t
'
r
The poinh;
.7,7
( 38)
.707.
-
t;en .re-resents
the
largest value
of
tc and the minimum brea-kf'reuency.
2.4 2
t .- i
1y
v
With the system transter
we
have 'or the
HtF-'L;st
function as given by (31.)
r-,equency ecuat ion (22 )
+ C6,X
.cD+ )D +('C+C)D
,+
ssume e
()
0, and from Arpp;endix B, equal,;on
a ,
6, >o
(39)
.
B-30'
:
Au
(A)
COMPRESSIBI LITY
r
PS
L_
r
L
Jp
F
L-
--
P
QC
i
MODEL
-
F
:L/x
FO
r
P
F
QR
(B)
INERTIA
MODEL
SYSTEM MODELS
FIGURE 2-5
Dimensionless lag tnimecons
tan
ys p.ppet valve openng
10
9
8
7
6
5
4
3
2
1
0
0
1.0
FIGURE 2-6
2.0
3.0
tr K/
: n.
-
J Mr (K+ 6r)
I
6, <o
But the i:: ;t;a ,:ttenent
by euati(on
iy ive
u~nsacbl.
directior.
(4) ,
so
we ;onelude
Lge-ntroduCd
-ve.s
easoning
of' velo t,
i
ienth
and a ine of area
.D-~ramica1 Equation
he fl1ud
,qLithdenitg
p . The generaL
-
_s
r
by
shown inby
genera
erminated
nd system is
hce cons. dered
.i
F;Sffre 2--,,
i
syster !^
for e comprie ne in thei
Mecessary dampring fCor system stability
Pr
'<
t":t
also agrees with the physic.
T^s
becase t-'
'
ts the .·.nequai ity.l
contradie
_ncom-pes1ress
*ble
and
system 1s shown in
;nd sf
oonss
.Jconstant ressure suppl
and a line of" length
L and -ea
A erminated
tre us
o -oet valve. Again we consider
the
by
lniearizeu
.foorm :
Systemeqlaaions:
I-
Li,
-,ne:
*C
.--
i" A
!-,
"I?, - df,:-,nd ,..'S
P= /-D- ,Q
;
'e
Lo c
(42)
Q S= ~ X
TValve:
CSombinre
:nd soie
-P
i
z
(4'7)
or p
oo
A(pX)
whi.h can be reduced. to the
A(9
A
-
G
4)
ToLrm
(15)
L
where the guantities are defined by equatiorn (44).
Substitution or K1 Ko gives:
L/
L
ir
( y47
a
and
=/+
.
These equatons
nondimensional
The
eid
(48)
z
on Figure 2-7 and 2-8 in a
plotted
're
foirnm.
f
.en'th a=n~diLve r>ly
c.
Cuency
#
-s p-roorional
rf0onal
to the
to to le
;ine
ressure
nd
vaive
ooenring
The vaive gain is given by
Z 'rso
For a
(49)
ystem
with anL upstream orifice included, the
ca cuiations
are the same arid shown in Appendix C-l.
The vaTa1ues for the time constant are changed by the
-tatioof the ucstrem
2 . 72
Sta'bi
to downstream area.
iy
With G(D) given by equation (45) we have for
the frequency equation
exernal
(22) with am
0,, .e., no
damping.
[M
DD'
'- (r.-':
Stability
is again given by
and
Z Ke-o6
. 462ZK)2= Z
,)
+)--
x60O
.-36 and 37 and gives
/:)
which gives
(52)
____1___11_1__1_111__-.
. ....
lead timeconstant
Dimesionless
- --L-l_--anu-hnT-·
,_
-
2n
..
v
vs. poppet
valve opening
18
4
1
.20
10
6
6
4
.80
.2
0
.20
.40
.60
&
FIGURE 2-7
.80
1.00
L)
Q
V)
QL
C
I
Z)
Z)
WV)
rv)
()
V)
ci,
LI)
Q
III
(i
C)
0
0)
'L v1;)
11
C
11
C\;
04
I
F
C
C
0
1i,
11
)i
I
C
tN
C
(O
FIGURE 2-8
C
From equattion(
we see
above inequalitty
as te
the inerta
always holds.
This shows that
descr ption
ishlc given earlier and the commonent
his lead ooooses the
of force due ;o
acts
. s
system is always stable
tabl izes the .alve, whichverifes
force
.
The
that this
valve
velocLty
and
ositive damning.
CombinedEffects
2.60
The orevious two sections showed the effect of'
Vluid elasticity
.4and
inertia considered separately.
These effects can be checked experimentally
in a
laboratoratory experiment, but in a real model they
occur in combinaton.
In this section the model shown on Figure 2-la
(section 2.1) will be treated in a more general sense.
We are still
concerned with the lumped Darameter model"
only, and frictionless
flow.
Combning the effects of fluid inertia and elasticity
?-ve rise
to three basic configurations
shown in F gure
2-9*
Model a is the straight
pressibility
sfeot
Models b and
n
*i
J,J4;
1
!A
,
nat
-
r-inc:
and com-
ombined
with the pooppetvalve.
aIe two varia-tions
tm-
.e:
'
forward inertia
of a with the
introduction
_ , ro
nce
Theoe
s-wo models
lcora
u
Len (Dynam.;.i iaract rL. t cc. ;
1L
'l1kle
Combined effects models
X
13
_-
cOx
La
R
L
3
C
FIGURE 2-9
-~~~~~~~~~-_
-24
pressur
dis
slacement
differ°e The analysis
o
for
these two cases are shown in the ATppendix (C-2).
Attention will
2.65
ocussed
node
on
now be
a.
Dynamic Equat ion
The inertia
ompressiblity model nder consideration
is model a of Fi-ure
2-9.
The system consists
o
a
conotant ressure source po, with a delivery line o
length L and crossection A onnected to the volume
and the poppet valve.
The downstream condition
are steady, pR assumed constant and arbitrarily
to zero.
The luid has density
p
set
and elasticity
/
In this lumped parameter model all the volume is
(psi).
lumped into ' o and the line L considered incompressible.
From the previous analysis we exnect the system
stability
to depend on the relative
lead (EL) and lag (')
magnitude of the
time constants from the line
and volume models respecti vely.
System Equations:
A
0
(5:)
Line:
p_-[+D*
Volume:
Q,,-=hg
-DP
(54)
Va
Q =l, X l p
(55)
( / .., )
vel ·
?R -
J, K- and. K
used
revLou sly.
aive
are the
flow coeffiints
By combniing and eliminating
AP_
which
as
the VI.ow
(56)
an be
ritten
as
(R7)
where the coefficients are defined by equation (56).
introducing the values for coefficients using t
tc'
2
the equation
reduces
By
LA/r' and
to
02(59)
I'
((6c)
These last euations with equation (57) give the des.ired
functions to ook at the combined stability equations.
2 .62
Stab
ity
The desired frequency equation is obtained by
substituting
(57) into (22) andgiven
,qNoS/o3 -iYo
-lls----lpB--l---
LI_ .I--^^I___ ___._ _ _
i9634o
below
cAX=O
().
-6$ a
Her, - and K
ThmestabiALty
a frst
arro
.Xiaton.
. vena by -35 is
Beo.fo substitutng
we tan
the right hand sde
smal1 or negligible, and when 't is
large.
roups
see two
when
In order to investigate further we htave "forthe
in (62)
involved:
(63)
(X(T4,)
;'---
(_
z94P&
_
Cr
(65)
reta2ostans
BoXth and R are constantsrplaed
of the
evident; as
(6(
)4)
R
-uastream
cases here:
-
oppet.
to the cond]itions
The two oonditions
0 euation
(63)
(i6)
now become
'secomes zero, but
equation (64) tends to _infinity. Tle inequality of
(62) is hen violated, so at very small displacement8 the
valve siould fe unstable. Solving (62) gives
___I__PII__IIII_·_I·L-·-Yln-*L-t
i--
but for
tiIa
his reducs
o
(6)
ifthi=
7DT'X
6
this
becomes
Eqauat-on(693) ives the stability
limit for smal.l
valve dislaements.
For stable operation x must be greater
than the right hand side of (69).
The other two roots to thLs equation can be found by
using equation (67) for the condition R-0O and
large.
Th. s yie ds
gt
ii4
(70)
or
Xo<
2"
e:
(71 )
Equation (71) only makes sense for values of the
s(quare
oot l.es; then unity as x o larger
no t r
-D
ersent a ::so:
on (o e >
,
than D/4 does
"ter.ombn
Lin'
(71)
(657) and
we
ave.
i, o
_4(72)
eLR
Equation (72) then descr*ibes the desiredstability limit
on displacement of the poppet valve.
If the external scpring is included the stability
equation becomes:
(74)
'7For
,
ZP
momD
(75)
small, this becomes
(/+5)- }?fR~ff+)
Figure 2-10 shows
a f'unction of
Figure
o-1i0
shows
7(76)
he general trend of equation
, the nondimensional
;
tends to infinity
rate.
sring
at
(76) as
I?
when
the denominator of (76) vanishes, but of more interest wouid
,-e
when
S
given by
unity,
ntproachs
*
Y
I.I1
lI
I
I
¢
/
/
/
II'',
I
FIGURE 2-10
-29-
7-
If then
2.70
- point of stable operation exists.
Downstream Eff'ect
Downstreameffects
are connected with the possibility
of pressure variations behind the poppet due to flu.d
mot ion.
These are due o both fluid
and comD-res-
nertia
Ibility, but also are strongly affected by the luid
vorticity
and turbulant mixing from the jet as it
leaves the poppet
Previous investigators
(Stone Ref#t42)
noted that
a popet stable whenexhausting into a "infinite
?
downstream chamber would oscillate when confined by a
circul'ir tube, indicating that the change
n flow
pattern caused by downstream effects and largly due to
fluid compressibility. A simplified
analysis
will
show
the adverse effect that this may cause.
2.7i
Downstream Compressibility
A
it is
simplified system is shown in Figure 2-i1a where
assumed the upstream
do.wnnstrram
volume
is
pressure n, is constant, the
and the :restric
tion
y simil itywe know that the equation
co
_
4
_
o, Tze
it
doH
o- n t.
is
given by AR.
are those of
e 1t
(7a)
rhere
(80)
lefr4l(/Ll
K4 and K5 are the flow coefficients
with respect to
D.ressure for valve and downstream restriction.
The
dynamic equation in this case depends on the downstream
construction
In this
of the Doonpetas shown on Figue
2-11 b.
case we have
,~ i A.n ,-- -x - ,,v,X
which for linearized considerations yield, with equation
(79) substituted for :
(f z
/3 #zD 3
c )OD
For stability:
(Ref. Aopendix C)
2,
Qc0
Zji.
(744 Ito.
kZR)O Q 6 RRe
(82)
> Qs ao
(83)
>'G9
(84)
.(.(
A
(A)
SCHEMATICS
'ORCES
AR
A
_
F
meKX
c
DOW N STR IEAM
FIGURE
-
COMPRESSIBILITY
2-11
~i
I",.
Z
a.
C
-J
U)
(D
6<
II
cn
U)
U)
w
cJ
So
0
0(o
0,
0
0
00
rY)
<a
<'
C'M
0 0
0
,·
-31 -
K r&/
or hen subst t ted
(8)5)
forCR
,9 ZP77Ln9
Z
(86)
wIhere
bt=
Figure
s*R.
(87)
2-1:2. shows tie behavior o
ecuation 86,
two values o
K
stable, wile
a has the unstable region
in a and
.
nd for the
The value of "O -. s always
iven by
he
intersection of the line with the curve defined by
E:uat-ion 8b.
Part III
3. 00
Exoerimentia
Results
B'ckground
The experimental
is briefly
outii red
ionaratus and test coreedure
in Aooendix
results are divided into
The ex.perimental
hree groups, Statilc Characteristics,
Dynamic Forces, and Stability.
flow
A- .
In Appendix D are shown the
oefficents for the fixed orifi es and the poppet
valve.
Thse vaLues are used in evaluating the results,
Al th;e "
,-suits
~reented are for
'a O.
orpet of'
,d'a eter
=
gi,in
i3eh
o -il id t
i "..amter
o
rem
l'i ne ;'}Sd
the ioZ7 .] e is D)
1.0 Stat c tCha..
TMe s"tat1c
Figu res 3-I and
force
for constant
shows the fove
n- '
-1,'
Ae.
erist°s
press;
or e
and
re curves
-.
Figure 3-! reoresents
ae
shown
n
the
ipstream oressure. Figur e 3-
and utistrearm; oressure
orifice Au is ntroduced.
:txed
Lwhen
The dashed
curves
eyresent
the theory given by equation(12and Figures '-3 with the
The
sine wave.
response to a large input, slowly varying,
output is seen to be nonlinear
as expected with the
pressures less than the teory
predicts.
The discsepancies
in flow coefficients,
are largily due to the variations
especially
eak
that of the poppet valve. (Ref. Fig. D-').
Again Figure 3-2 gives indications on the (low
frequency) output to be expected as function of vaire meran
oS' tion.
.-
3.20
Dynamic Characteristics
In this section the val;dl t
developed in sections 2-40
y
of
he equations
and 2.50 were checked out.
The poppet valve 1isexcited sinusoida1.ilyand the force,
dis-lacement nd upstream pressure is
arfed t toe
teory.
recorded and com-
Ill II
I
Ill
__ I
I
i
i
-
_
I
I1
II
Ill
L
.
-4
I-i
C
E
-
I
I
ii
I
I
U
1o(0.
0
i
\II
i
ii
I
-\J
i
I
_
\
A
I
I
0
_
I
N
-
-
_
_
I
I
.
I-
I
U
0I.
Ix
I
I
I
0
Ol~
0
0
I--
--
'Q
--
I-
0
0 t
0
\--
JA
0
---- --
U
--
Q
C)
- - -
(n
_
0,n
-_
0 0 0CM
11'm
*:
' a
.
0
-
zl
V"O
0 0 0
eO
0)
o
r
a."
FIGURE 3-1
Vwo
0
c(i
n
0
0
0
0
0
L
II
0
cL
><>
.)
LLI"c6 i o
FIGURE 3-2
0t
SLnce tie
~ on~~ from 0 h
.rs'~n~
omne
y
t
i
i
erome,ry
as m
is F equ ei
enc
pce
paratus
3- trough
(ot)e at
cps)
a .n mi
u o.? of th e upstream
C )~ the ma
agnif
led to create measurale
Lag values :'or pre ss re
The results
ii; ed
,ead and
and force.
cart
from thi
are
sown
Li.nFi gtlres
3-7
a Compre s s ib I ity
1k.
Rte sul isS:
,
3.
The system tested is that shown on Figure ~P-ib.
In the exoerimenta. st-u,
both L
.nd
u
are changable
as :well as the mean valve position [o (or Xo).
Figure
3-7 shows the phase lag ~ betw-veen
either force or
pressure with dis.olacement as a function of system
volume. Figure 3-4 shows the effect
of changing both
volume and valve mean operating postion.
shows a crosspiot
Fifgue -* -
of data obtained from Figures 3-3 and
3-4 on a nondimensional
b-:as.
and i
to be ,compared with
the value of equat ion (37)
·
B.
Dis ussion
The results
oS Fi gure 3-5 follow the theory well.
The vali e used for
Pis
when it i - -onsidred
th;t
·.eii*
d
rwvaic.
u
UC
TVr
r50,00
,
OSi, WiCi
is high
the oil haesai
entrained
tl.t
.
't-e ?I> Jt
'T
C c
O
O-
j
c~J)
0u
u
u 0L
O
LO.L) O
II
U
1
C
I1
I1
1
U )
X) - CJ
0Ln
LOC
(Y)
0
QL
.......
-4il--
I'
LCJ '0cLu
.-
I
I
-
I
I
I..
-
I
I1
oO uU
-
CM
......,
0)>
LO
O (n
O
O
0) 00
O
N
O
()
O
LO
10
O
FIGURE 3-3
O
Cv)
O
NM
O
0
o
V
0t
0)' 0
LO O
O
II
tI
II
lii
II
(~
(1
'
a0.
0
51
~
i
I
II
Lf3(DaEL
<
I II
0
Ln
0
LCI
(Y)
Lc
0
0)
0
0.O uc
3
I WA H~~~~~~
1)
U))
Oo
0
t >
iiH
i
CU
Ii
c'J
(Js
b O
aUL
0
0
1
00
a)
O
0
O
N
O
CD
O
I)
o
.
0
0
(V)
C
FIGURE 3-4
FIGURE 3- 4
0 0
Ex
10
imental
time lag vs
pet disp
cacment
9
8
7
6
5
4
3
2
.1
0
0
1.0
2.0
6
FIGURE 3-5
3.0
X'0
t)
I
.5
I
I
Q(
IG,
D
1
A
!t I. I j4
-rLAuIlkLU
%
0 1
G,(j
Newtons la.
C
(iP)A-
or:
- KX = M X
-G,(j)A-- KX-CX~~~~~~i MX = 0
_
,
.
.
..
.
..
VECTOR
-G
-w
---I4~yle
unstabilizing
comp.
I
I
I
II
Le\
.
DIAGRAM
a
aT
\
_
-C
I
I
I
I
LA G
EFFECTS
FIGURE 3-6
;
-
dl
s
-
a
%
x
of" thiK
urve
is
n -sebjly o-rot>o
na
rt
i o
se n
is oios
witnhn ressur
oeffi- e;nt,
l to
s,hne
su
urroo
the
rlow
-t ,cn be een that K-
nfrinid for -ma'
starts -t
(34,}where t c
fornm equation
and de
r
ases,
whle
K,-
then gives :for the
starts at zero and. rncrease. The l3um
resultant
at
aquation
ai maximumfor t
(or minnmumf'or f,
S .707, Thraex-eri.mental va).iue here areed
Since the excitation
low, the nertia
nelLigibie
and
reQuency..
.
of t he popvoetis
force due o the
he fluid
motion
ooppet is
forces were measured directly
by the force gage. The resultwas, then,
fluid forces were those
caused by the fluid
in phase with the nressure.
this
results
that the
pressure
and thle force diagram snows the resultant
force and that itt has a
and
For the case of compressibilitv
Figure 3-6 shows a summary
is a simple 1ag.
we l.
omponent in the direction
of
the
ressure
of the
veiocity so that it is unstabilizing.
3.22
A.
Inertia
Effec-ts
Results
The
iJnertia
model tested was that given by Figure
2 5 in
he analysis, and the results are oresented in
Figures
3-7 and 3-,3.
variation
Figure 3-7 shows uantitatively the
of the ohase ilcad of' ressure and force against
valve
displacement
the data
and
presssure.
obtained for variation of
F igure 3-
contaii
al1
he oarameter, eroT0S
Jotted on a nondimensional form.
3. Discussion
The agreement between the theory and model was
initially off by 20, at the most, but by including
frictional losses and entrance loss due to the constriction
ait
both the valve and source and, the theory and
exoeriments agree well.
The experiment shows that the inertia
force gives
riseto a phase lead. and that this is realized resist in
short
lines.
Figure 2-9 shows a summary of
with the transfer function
()
he system
substituted into the
dynamical equation and this shows that the nertia force
has ~ component proportional
to the velocity,
but opposing
it and thereby acts as positive daming, hence stabilizing
the valve.
The effect
of friction
as a restriction
can be lumped and considered
(Ref. Appendix C-i) and reduces the time
lag predicted.
3.30
Stability
Stabilizing
t'orce Fo
L~~~
= pA
the poopet was done by applying a constant
:and havin g the
_____
^____IW__L_^__iX___YIWLP___I____I__I
pet
suspended by
Pt~usoece
____
L-_·II·I··I)LII--l-·-----Y--_l
--IICIIICCIIPPlp CIIP--·-- --
0
ea.
O
0
O
0"
0
0
. J
0)
o
I!
11
0
I
I
xO
0
0Ln
l'
I
0
'Co
N
ra~t 31
I
0
0 >
ol
cn
L.cC
Ln
a.
I
CM
'IS
0 >
lI)
N
0
0
4
0 .
a.
I
----
I
-
I
I
I
0
FIGURE 3-7
I
0
I
0
Line lead time constant
vs. poppet valve position
15
14
12
10
8
'V6.
4
2
0
0
.20
.40
.60
A
FIGURE 3-8
.80
1.0
t
I
i
I
QS
Ps
I"&l
I
i
I
i
I
I
(X)GtD+
i
().t
- L-7rt1
i
1
Newton.
or
(AP)A-CX -KX-MX
-G(jc)A-KX-CX-MX
VEC TOR
=0
DIAG RAM.
II
+X
- bI +X
ig comp.
LEAD EFFECTS
FIGURE 3-9
The system damping is practicail.
pring.
cantileverecd
zero when ter
The mean
:iS0o ydraull
of
sition
o
the
ressure a pl ed.
I
oopet was stepwise
cha;nged and at each position it was plauced.
the 2nsu n
died ou,l it was considered
vibr.tion
This metnod, even though
stable.
f
rude, has a fair
degree of accuracy.
Simli fied Models
3.31
A.
Compressible Model This model was always found
unstable
The :freaueny o oscillation
as expected.
was given by the combination of the hydraulic and
popet mass.
applied spring rates and othe
B.
Model- This was
Inertia
ound stable,
small displ-icement, it was unstable.
but for
The reason
here is that at small (displacements,t he volume
intertaction of the line becomes important
nd the
system approaches that of the combined effects
re-
-orted next.
3?
Combined ffe ts
The stab)1iitJy
teaistic
system
na ysed
n section
of what may be
Twas
tested here.
:.cO,
onsidered
a more
The system is that
and shown on Figure
-9a.
Ih
these test~s the Lne
were varied
w
,i:~D-uy
~:ressure
The results
dip3lacement.
1.
thro
o.L. ures
~rn
r
t
tr
are sown
on
igure > 1 -renrp
Ag
3-10 and
e vve
n Flgures -10
t2
eauations (5)
limit
and (69).
t
he experiment only cecked
0. The
had no meaning here as the square root 'I
equation (70) was always
was
ross
l.
,Jhestaibiityfor the lower limit, I..
upper
i
are here ,comcared
again to the theory
The results
for
7, volue Ir and te
.nih
then stable
larger
than unity.
The system
for values larger than the exnerimental
curves.
Within experimental error the experiment agreed
well
with the theory, and it showed that the euations
definitey
h?
ad validity.
Two main factors contributed
to the difference in the e,,erimental
theory; the value for
and f'rictional
effects
results with the
of 250,000 psi is too high
decrease
and raisethe stability
t e ffect of the ead
limit, as ndicated by the
previous experiments.
3. 30
Downstrea-m
Ef ec s,
A qualified analysis
'ring
e
of this was
rim l...lv stiaLot
ot made, but
,1lat
i ns
..-
L
a
()
u 0 '0
LO
) 0
,
(n
U)
In
U)
U
C
L-
i
>'
0~~~~.
:
x
u3,
(U
I
I
l
I
o x
r-
I
0x
0
o
z
w
CL
U
w
a2,
LJ
V)
C
0
00
C4
0
o
0
0
0
0
0
0
0
0
0
0
nssad cddnS
!sd
sd aJnssJd: lddnS
FIGURE 3-10
0
x
-
m
w
-)
>00
i-
Ub-
Q ~~~~~~~~~~~~~~~~~~~~~~
C-
ft~~~~~
54~$0
QI )
:IQ) z
03
Q
II
II
s~~
-i~~~~~~~~~I
v)
0
0
oQ)
0
t cz
CO\
0%
CO
t%%Z
·
Lrj
N
%
crP
90~~~~~~~~~~~~~~~~~
.
a
I
_
z
0
L
n00
0
(n
i.-
a.
n
U
U)
C
u
>
0O
C
0
to
·n
L)
H.
>
a
E
II
A
XI'
0
11
0O
II
I
I
X
<1
.
I
i
CM
CQ
oD
(D x
-J
x
CM
FIGURE 3-12
occurred
that
er not expl.ained
:Rot no external
the
sorin a
opDet woulld
osc'llltions
by
ied
he theory.
or very
into
no siow os.c liat-ons
occur ed for
w
These same
valve
Irferdisplacements or
Kr e fows when "he valve was restrained by a hevier
Th is seems to tie
comoressbi
;he return
fre'quency o
the valve.
in
with the
effect
downstream
i ty as out linedin section2.20.
line
was
oscil
tA-ted with a gate vve,
ations
Since
the
could be changed by cosing
The downstreampip Ing consisted of elastic
hoses which reduced the effective
system.
of
spring.
compressibitLity of the
A I•ENDIX
A:
Exper:mental
arparattus
a,d
,,ocedure
The Ao'
aratu.,
An -acarat.i was des i.ned a-nd esed
Murra.y (Re.9)
as
art of a iMaste
:
by Taft
Thesis pro ct.
This same ap.-aratus was sed in this investigtion
with somemodifications.
The schematic of the apparatus
s shown in Figure
A-I.
The apparatus consists of three major nits:
the nozzle, the poppet and he drive assemblies.
The nozzle is a removable unit and can be
changed to conform to any pstreamn condition that
one would like to represent.
The poppet assembly includes the poonet and the
drive stem.
The stem s housed in an air bearing to
reduce friction
to a minimum.
A ,compensating chamber is provided, applying
constant force by the Air pressure p, to compensate
for the static
hydraulic forces on the popoet.
force gage s an integral
part of the stem.
a semiconductor bridge-type
The
This
gage with very high stiffness
and sen-sivty.
A iLnear, variabie,
s
differential
transformer
(L.v.D.T.osltion cickup is attached to the stem,
I
Lt
-
LL
0
U
I
:
w
,*
v
,q
LL
to mornitor
va.
e d
is_1
acement .
The drive unit is a sinusoidel. am, provided by
grrnding the cam surface that holds the cam bearing ecentrl
Ito
the two mairnbearngs.
The
can
am displacement
b varied by movin the cam bearing in any position
between the bearings marked () and (2) and is roportional
to the distance rom bearing
(i). Range of eccentricity
s .001"
s.eed,
to
The cam is driven by a variable
O07".
motor with seed range from 3.0 to 45
electric
cycles per second.
The upstream pressure
s measured by a pressure
transducer, mounted in the nozzle housing immediatel.
upstream of the nozze.
The electron:.c instrumentation
pensating
networks,
preamplifiers
consists of
and a C.E.O recorder,
The output signal from each transducer
s preamplified,
then sent through variable gain and damping
network to be recorded on the ballistic
This gives three simultaneous
and displacement,
om-
compensator
CEC Recorder.
traces of force,
ressure
and the phase and am litude relation
can be deduced easily.
Calibrat ion
The calibrat.ion
Tke uorsss
re
was -erformed a follows.
ensi;v
ty of the pressure
t:ransdu cir
was cmheked aa
g
ns t
innutt to tthe iie,
gTal'vanome ter
ea
e
-t
ii
of
of'
5Ihs.
At 2
VDT transducer
.indicator to yield
a
ive
by arnlyi.ng
vO
iltS
was checked
senstivit
o
a
exc - tation,
outout wa adjusted to give def-lecton of
The
a 6 voit
i/In
OK
The forc. gag- was cai Lbrated
known foru
o
et so 3ao
and the gain
defecton
este
it.
'bs/in.
l
agains
ta
aiial
.0 02T'/n of
ga vanomete r t raveit.
These ca!ibrations
were done aFteach set of runs
s the
output of all these transducers
proportional to
.s
the excitation voltage.
Procedure for Obtaining
P and F vs x.
The rocedure here was straight-
apar
The
,.tus
had rovisions for changrlng th,e ustream
parameters
L,?To and the vaive dislacernent.
uostream orifices were fxed,
was
The
but ,2'hangabie.
For a given set of conditions
st an
orward.l
the hydraAulic test
tart-ed alon g with the varUi ble see-d : oi;or.
Data was recorded at s-peed increments both for increasing
-'nd derreasnag
speeds,
and dwelling
eacn speed to assure "steady'
ol:ong
(uni f orm)
enough
;t
onditions.
-
ProtCllur.for 'Cv: licin
o-'the oope
et
one of
' e
en -et
the efnd'
.o of th
sautort.
eraing
the
-tenm
and
catn b
of lengtli to thicklnes'
The dynamic resoonse o
on
-
srg;l- .E
The sp" ng r ate
va-r:ied y changing the ratio
was checked out
, "
w
valve,
seru.-3oi ded da vi was removed and a o,.mflvered
wasttached
,
Stability
the st;ibLty
To t.est
q C-.
4.
the ocpet and o7
ot.thae
3rng
the oppet dis l--picemrent disr i-'red
nd
-ioso - oe.
n osc
3B:pluclking the .oppet, the natural
rrequency and
damping could be de terrmined.
The damning ratio of the system Twth no hydrau c
pressure
on was from .03-.05,
:n the theory that c
so the assumption made
0 is good.
The natural
frequency
compared we11 with that calculated.
To determine the stability
for any given ustrea m
configuration, a constant force Fo was applied
pop.petto
ompensate
force by the
The poppe
for te
onstant air
the
steady-state hydraulic
ressure
position was then changed through out
the range of interest each time it was
ing a sep :input),
out, the
to
and if the
luc ked (represent-
nitial oscillation
ystem was stable; otherwise
died
t was deemed
-
urst. abe.
Att tmes I ticas not ev
neessaru to touch
the oeu
-tocheck Its stabii ty.
Eventhough ths
method seems :riude, wth a bit of
s onsisttfent resut .
yild
PE
or iX,
..
t
D-
44F
A P PEND I'X
B- i
Linearizat-ion Techni-iues
Or fl3e
and Valve
low Equations
Consider the flow through a variable
in an incomoress ibe low.
The flow rate
orifice
(n3/se
)
is then given by
whe re :
c -
orifice flow coefficient
orifice area (in 2)
Av = C0 X
5
fluid density
Pi and P2 are the upstream
nd downstream fluid
pressures in (psi)
The linearized form of equation B-i is arrived .t by
considering the small changes in flow around some
ing point given by the valve displacement x.
Sincr flow is a function of both nressure ':-ndarea we
operat
write the change n flow as
0
=/r,Ax
-X'-IZ2 AP(
(B-
)
where K and K are constants.
eva' uated
s
These constants
, A i is oP
Mathematri
o lOwS.
is
the f orm
and the total
change in flow given by
By comparison with B-2 this gives:
aX1)
k,
(B-5)
~xyx
where K, and Kr) are evaluated at the oerating
An example of this technique will be given.
poin.
Consider
the flow from a constant pressure source through fixed
orifice A
and a valve (Ref. Figure 2-i) where the
constant pressure is Ps, the intermediate pressure is
p
and the exhaust pressure is arbitrarily set to zero.
From the continuity equations we get for the
ntermediate
Dressure
J
P
Rs-
1
(T
7'
.r.
F" ow or
2nIed
it....
o<e
otroena
from
the
a6~cA- /4t31Ž
F om - weobt1-in,ay
(B-9)
If-erenti atlon,
2_)
2PS P)
2/P
(B-iai )
-7 gives:
but the use of
gqain"
b
Eoationm
tMd
53-1 now de scrlbe
3-a
Fixedor lI4
.....
ifny oeer
c:;
t
1
ng
>
jAv
-1
73-2,
I-voc
Iee
downst
= r/ X
t.¢ n t
The
t
e.'i
l:iow through
valve
the
kztp
f-1t`LQ
o, J
th-
of the valve.
point
.tlAdx
P:o:rt e
ts5 i
)
fow
is:
(s- )
. iv
S.'
res
, -3-I -I- - ,- j,II
I
i
...
:1.nd
:::i wiit
s
Dynicm csiz
f
-i
_Lin
:
frictionlesu,
The dynramic-- equtcior of Incomnressibe,
0ow f or
i
section of p ,:
ip
e
,a differenti
.,.re sp
differ
.~ eanh
i3y
:p0
shown r Figu -e
:i s
1 Lien
-ced t
PA-(p dp)()
part
-a
Asecion
The two sections
ind thre propertie
'
mon ts,
T4d
4dR
d ffe:renti. tl equa tion of mnoton for
sthe
(B-.'6
line
e cro
i
2see s t on.
olf v7.';r
'ab
For
(x
r yieids
torde
d(p4)=pwqdfdX I
This
i
-i
of mot:Lo- we have.
l -Js of higher
D±
ro'ing different
-1ia.
ornly by diffeent
.ewton's equatilon
lying
Coonsder
d e re.
ot o
ne Wi 1 be de vre
I
T-Q -e°omes,
l-
e, of , onstil,nt
n
n
t
ir'e ;
ed
nd en th L,
e1u-on
I---
dx --
I
I
I
I
I
I
I
p
p+dp
V
V dV
A
A+ dA
Valve
L
H-
L
Valve
I
©
DYNAMICS OF A
FIGURE
B-1
LINE
/
.....
"n+u
tn
O
J"
.(
Sj
I}i iIr)°-)S
4.
.....
j
.
I:
ra~r>
v
e2
>A
of
3
-rt_,.a
cornz
Th-b
in
Fe rs
2onrected
o° the vae
('
F1o-*
3n
2,
=
from the
nta
-uA
(
'
'
i n,
hownna o
o
to the oine
:eeY the relation
the
1
,d:,'l1,.s, :ow
in
.
8-!
B
in Fiu
f
glv
orr Ih :-.i --is bs
B . b- a nd
u
t'
07.
=
p 71pzi =7
,Ltine
:t
>btween ;h
nI .o
srwd'
are
oes
r'
or
mai
na Kt by te vlve.
L and t
": " )
'-it
Liow : nd
e
-r,:..,.z'r
r
:niosumed
-
at
,t."
PS=
O' (
so by combining
e se rvoir,
f -l- ' a.r d -`
we have
9+
-
D-
nnod-'lw
-s
:,u-I1
s
S.,~e
J!n
'o.
;o
d 'O
,
mean r±low.
;
or, 1f the UdIfŽ;erntia form i
where -
tauaion
-21 decribes
k
-'-t ur b t on
By-
eL
r
t
as..:tlonwe
the desLred
L.n -he varlaba
e ItLaon
by wrting
p or 0
the appronria t equat:ion for
the valve.
The second
ase i-n
is shown
estrL>+tons have been inserted.
.ressure
t,'-
The relation
where
for
and equation B-1,8 for the line.
As'Ume e i.an rite
; _
witiisn
-1
and f ow w- l1 now be given by the flow equation
for the restrction
as
?isihe
75=meB
1-'
3
:e h::.ts
the flow through the restriction
K-r
(5-2zf
,
dO
)P= r
rn J7
.
betwee-
res sue, Explicit functlions for e. h-
,anbe obtained
w-'
tropped.,
he va'at'or
and 0 reresents
".ow
asnd
2Ier
lo :na n1
OnSI t'he- 3)m'.a 1.
ne ;e - a
w o;
r;,4
non
L-l
,~i-'-"
.. ~'e:!
~-e relation
re-~
This
. no
aot
Oi
ne,
:restrlction j
to any grt,. te
x
nt
in a pipe on a lumped basis.
for K given
'rsy th
eaation
B-1
APPENDIX
B- 3
Lo
orfie
e
np-ied
tih
be due to
the frctionai
IW
ith
the expre ssion
(equation B-)
irea go o the
'eu t~ing the orlfie
or~r.
t3
K cou
also thought of as representing
effects
V- a
ted with .iApes, ar or ..f l.ce,
~ 7.oss -ssoi.
thaz ,~nvra.nrc
0or
se -'-~'~
w
and by
ipoe area A, we e
.
Stabiiity and Routh Criteria
The stability conditions for a fourth order
.a.l
uation will be derived here. A more
dif e;rert
detailed derivation is found in Ref. A10section 14.t)
·
he dK 2 rer ial
equati'on
[QDv +Q3s 3 #QaD2*QgI5
whee
-
d
We s,2
ek ;
e
se t
o
D
-itns
is:
eQZXO
(P
-a4)
.·i
-l9
t~p·
A4
·-
"
eI
0/
L
*-}
to
e
aI
a-l
(B-ei)
(B-27I
a, 4]
lav
b2= - 'a23
Q0at5
:))
The condition for stability
in the
( s-28)
3sm
= .00ea
0064
it now hat all
column are posti
'irst
For ondition
the cof
icieents
ve,, , ...
b', o
(B-29 )
C,>1
(B-B30)
&29tiis
gives
CZ~~~~~~~(LLI~~
6r/a~~~~~~q,
>0
rr
a 3 a2 Z>2a,
For cond
ion
5-3-:
(B-31)
(B -2)
a2 a
>a3 c2
00
Nw, th. ne:es.ary
it.,
s ;y that
b .....
-re s ti
Th'y
a)
and sucffcrint
neqa
t
.e
,
.
~onditions
For
nd
ti 3
e :s o.-
f ied..
an be rewritten
s
a
Qs2a2- 2Q, >
Since we assume that a11 the coeff cients ae postive,
ten
he te rm
c2,a
Thus, .i quation -3'
s
>t°
atisfted
(A-34)
then 8-32. s aays
sat isfi ed.
Equation 8-32' is then redundant and the
s a
tability
only .,oncerned with 8-33'or:
a,
By simpfl
reduction
the otab'ilt.-
of a
tth1d orde
1__11__ _______^_I·---··-_--------·YI-·
IIII·llsl·-PLIIPIIYII·
"-
on :s,' ound b,' s;e tl ng a',
:q a
a2Q >> a,,
al..O
g
so:
so
wiJ
,
APPfENDIX
B-4
Nonlinear
Analo
> O2
(Q-aL
Cornouter Program
Compressibi ity Effec1t
This secion deals biefliy with a comuterpogram made for ·,naiog (omuter)
n section
2.4C.
The system s hown '?-5
conSi sts of' ,onstant
pressure
suppl.y p and flow s
discussed
throug'h te upstream orizce A
;olm;
comrressbilit
presu
ied
the .uid s deUscr½
y
(psi) and density
ce
out througrh
re
S
poppet
valve
>o o.
and
The intermediate
,
IsO
system
study of non-inear
by
the
p
.
1
The t'ow
pR, the downstream
o ns-t at
Sys tem quaionr
Q6P~~~
~~6Ps~~~~P)
O~~~~(~9
_
- -----
_ _
__
1~
and
differentil
ti,
,te
resulting
By combinan
,
(
p=/Oo. /3 P
s
equatioLn
obtained.
r d 4v
2
(B-4
O
~~'P)kzcc.
In order to study this equation on the comnuter, we
bring it into nondimensional form.
De ine:
Z
P
y=
(B-43)
Return pressure PR is small suln thatpR, <<
E uat ion
then becomes
dz
(B-44)
Y/ --
where
(B-45)
3tuation
Is
tLm J, '. in
.: . " ~
sl
e
' .t 'oa
riaI
nondirension':i
tae, n&t
!a
i
'
1
.':trd.'nmeAion
.
t1·!--d. men*
'
e,
wne
'": ~
~
~
'i. s
on
.e
t. -.
IJ
n siorla
me
tm
d8
Equateon
'T
_i.
w
-
4vS t e desr. d d& ritia
c' tion w
-e wmtan
to s
is our input and 7 is
dy.
the system response>
The systm
idaly,
n Chis case was driven sinu soi
ing-
-cao
thi
Sinrce
.r... S.n sent
,
'.in
~th," signals
"o
t
.In
tLA
analog
cormputer
variables,
I.mu.
a
-hav: same sea
.'-:ustio
n
'
p
':,'~w 2o
.,,ou
ng (or unit)
S kS
'
'tre
t1:p.-,:.
nt
so a
no
,
t
s .o !n
;
:er
io analogou
.s
In mehan -
st ,:XY-¥am-.
~ -
ges"
su~. .m:gka
h ,
ro V.
The
.
n ao pa.rd
of" d:rrtmens"onal ?.a!.ysis
.~e..
comn3jares vola
:~ tPt f ~:"s
'
s From >'h >} 80
we see that
un.
t
of
VOltrs/
,
when Z is unity
the
term is zero.
represened
Let, u-
.:)ust
tting
of Z.
''un'iL
or
by 'one
reresent
by
h S 'weget
(: -"
e = i
scitng
0
Jvolts/unit of
an andre erm thus
C, and Is gSiven in relation to the unit re-
presentat ion of Z,7
imilar ;.rguments hold for tie
other terms.
By completing the scaling
draw T he comletie
schenatic
for each term we can
omuter
on -. Philbrick anaiog computer,
done on the K5-Munits
and
digram
as used
The square root :is
ntegrat'on
-nd summation on
the KS-1uunits,
This is s hown n F i gure B-2.
This program was used on the comuter' to test out
the vaIldy
of data obtained both n linear and non-
linear oeraton
of t he poppet valv e.
between comoruter values and e,-ermenta
.
good.
Tlhis substantiates
in the stabiiity
analysis.
the idea
o
The agreement
.
resu'ts
ere
the com.-Dter, i11se
ANALOG COM PUTOR PROGRAM
I-
I
Q-u KL
- 2
...
.r
tl
?
--
Ik-
.
:~oo:'n
a/ :c
*vr
S·'
$m;g
%1:
Xvf
·
'
· (U'
(
b3+"%
n Jwii',
o-':
'
_~~~~~~~~~~~~~~
Ki;
.s
o:-.
'
7
_* -
,
o n
,>_))
p
Ca3 i
i,,
0tz
Lj
'
J;
,
...
Aik
X._
"
nI
a
u
e
1
a
iv~PL
nd
SP.
lal
n
'.omr
%
h
0
o
fj
J
~o,
w
i n . ·u
' £p- p~
p)=.-i
ii-e .:
cfr-,K
C$
0,
rn
r,t ,
9;1
n, ".'...
r zJ
.P
14
-,
:
~.nt c C an;
·~
F; LA
f 5'-('
,'
·
\
oo V.'
..
D
^,
".
a ..
·
19
m
("-"'P.
B*
.
-
~'~
~;
].owngr
''......
~k
4<2
I~Ji
4c-t
*
·- ··
.~D ,..._
'j
.
fr=
-1
t !X -i
( '~,_!~n
~*
nom
n
6r ; @)
e..
o i-6
s AC2.
Inf'
,-~:'
bd
'-:'
n .;_
X,2~~~~
<f> er) ,,-v+i.'0
t
;
r
-A
yi
fnt
K
:l
- .· 0 :.L
0O 3 . ..............
'sunction
ob .ned
*
w ti
i
s
-
et
u
t -o orn
a c s
-Z3 D /
-o
46
TleZvau es
g*
-- 41
(
~r
,t
^ne
By subsKb+wut ' on %-nd e r:nn-rement
rti.
-I
3 ~ MO-0
I
2
= AAO J'qr%
n.ua
I
i ina
°n
'hYi
~e
z
g. 2
V- .471
fin
' di
'y:/eA
sS
Au
__
:3*rq(r
(c-9)
desired =xression for stabiit
-ne
.,
according to e. uaton
sec
-
ion
;ra:r
,ways.an ur iy,T
ria - d
gcnir;
TheA
cn
471
I *TQ-f, ~~~~~~~~~~~~~~~~~;r
r?
IL
Fl~
1f
/
-
(c)
t
Equation 1]3 s
rS)
-Je'nbye-qu
,Pi
-it-
=/ E
dn
-
Z74 AD 06
2'
*
-2
and
since
e Soytem is
'
y
s
ti
-tabla5e
by
46
vu
IL
a +-
a- it
I
%
(
ILI.
"
• i
)
*
_
7!~JIDI
_ ¥ .T
_
2omb.ibne
_
,,C - _2,
Effect-s
frn this
,onfiguration
the two remaining
se tion,
confiugrations
showin_n F._re 2-9, S-ction 2.60 will be considered.
Model b in Figure 1,-'t.is considered first.
System Eauations:
2s= - K< P
Ori fice
p . =--p;44D 0:
line
Va ve
=
0
>c(;AZip
P=
Z?
--
.W0
0
)
on the form
vs..* x sonte.for
-Y{7=
=geZtt+Ag3
=
)
(C-11 )
0*z5-,z-or 0.*
~o*
x-t 5,f-Z
,
w1
rm
.....
--
(C-
IS
3vycombining, the expression for
r/P~'
(I
3DP
s Q
Vo 1lume
whtlnere
(C-tL)
to
4 Ka
,
0 -
r-
(-10)
(c-17)
Ith
-A
#K
o
*.ea
(C- 18)
The exrss.ions
identIcal
in equations
C-9 is identeal
These equations
-1: ?ae
and
wi h those of t he )reviou. secton
',k-ation
'.;40.
C-l , C-7,
and
with equation 34, Se>ton
arz- more general
in that
if A
A,
theline area, this solution In the unitrepresents the
soloutol in
i ec Lon c. .
The stability
equation
of the system is related
So2,
Sec'ion 2.bi.
LeC us now consider the t;hird basic
shown on iigure 2-0, Seton
basic
a
mode.
The only change is
onfiguratlon
model
assumrtionsare again the same as
orevious
through
The
with the
hat the compress-
Ibility alidnertia elements have been switched around.
,yo'ten
e uat ions:
Or rfce
iVolune
ljine
Va ve
S-K
(c-2)
3
QP.
(c-il
C.
P
P-SE~P~, -cr~D-1
Qalv
-X
k2 PP,
('2
1-4
:.-, -3
:By
~h~c
aoin
and
ins
fol owing
4whh
morean
oveiently
be wrtte
(-,an more conveniently
be written
:Ls
obtai e
A2
(C-25)
iPkq/
he coefficients
d
n
Ba
nl B,D ~ I
Z3
2 D2 ÷,D4/
00,
whee
t'e
2e
~aranging
are defined by equation 30.
Rerlernmbe
ring tha t :
LA3
"
;
C)=o?
a, k
a+hena
23-
.+
B'=
afnd
=
2
(Y
(C-27)
f
z'
)
I(04-8
, ,, +t/)
(C -)
gS(uJ+ /)
)--=
6,70,
t-
a:
=f
uL_
.., , _
Y-I--UEI--L---_--C-·-_L---_-.
_
/
tC9
-1
4
/*l
J
(0-29)
(c - 30.)
~,r, S
ia.
T"e anTlysis
"
0o
any
on.e
has Snown tht
can be obtained
om
os-y;m
bination
func- ion o
tvj
the basic
the trarnsfier
lead
exresed end
nd l.ag time cons tants
on t~'e CornQl.xt;y
de end nl
Tithe.i.t o
t o
of1 L
an
Trlo" i
Al
i 2ie
Lnertla model reduced Zhe system t,.me consants
~omnpoaredto
he rezcse eding
marg'in of stablitr.
:o.nsidered as
ttrl.it r-estane
n thne
as
no.deland. also reduced the
s th e ustr, earn orifice
xled system res istance,
can be
this then shows
In general decrease the avallr-able ysteAm
amo
ing ..
Introduction of an upstream orifice
.case had a )simlar effect
of the
iens. tion
avi ons.
in the combined
arnd also increased the comDlexity
For'rmodel e this lead to a di.ffeential
equation of higher order than the revrious case. Even
though th-nis modewias the most gener+a the euations
are omplicated to analyse. Digitai or analog comnutation
seems the easiest way to eneral stabin ty conditions in
this
I ----- - -----
ase.
------T---·LPY9CCP(·IBsriurr--·i---(-
-4 -
DIr,
D N
D
o;?iCoe4'.cfert nd 2nsta ns
o.
oi
's in;
Th
:ior
the
a e
2
lD;t
s ream or i
of
90
1n
econtain the f'Iow
s
°
ffiien;
,oe
v> 1e
vOpet
id
'the
o
the
-O 0
The hydraulic oil used is J-43 :-ndits vis osity is given
on .igureD-4.
Th
densty
ronstnt
temperature dring
iOOF.
we(sewas
'umed
oDeration was held t
is the
pproximately
/p= . 80 y/O-Y
/bS-t,/
whie, is based upon the aIssum-tlon that the s'oecifi
gr.:,ity
,---r-7·,
---- Y-YIIYa.----UIl-·LI-P···-·lll·
is .83 at
100 degrees
I·III-YtaUU1---_X·-_^·C
F.
C)
(Z
CZ)
tic)
0o
0o
(3
0
Cl)
C)
0
0.
I
II-"t*'N
%V
Q)
V)
0
t
li;
ct
QJ
c)
Q)
Cr
0*
0Z
Z:)
Iz
jljeO2 M O
e/iJO
Q
q0
C
C)
-0
QE'
OR
LZ
C,
LL
.
Q)
-
CZ)
Qj
-
0.-"
0s'
cZ)
0o
c(
0
c)
0) 0
0
0
Qo
. Nh
Qj
cE
0
*-..
LA
N
3
I
Nt
t3
____
-·---·IIIIPI·I^--YI-_-LLI
.II1_I·II_--·.·IIL_----·II_-LLIIPL_
L
(o
O
;roo M/oj alZZON
Q)
C"**
N%.d
%
V..
,I.-I r'l
VISCOSITY VS. TEMPERATUR
HYDRAULIC OIL ;
FOR
UNIVISJ-43
Temperatur; degr F
10
1 0)fl
U)
oQ
0
-
0
(n
*5_
10
E
0
E~
1.0
0
100
200
FIGURE D-4
I __ __ __·_I __I___U__________JII__WIIIIII---III·i
300
400
A FPE ND X
E
.a*;, -99
, Oo s Re.
t er n
es
'
Y and Backblrn,
J .F, xK'l Fo res on
Le ,
,olto-Valvz
Pistons,
an COtol
Dynamic Ana.ysis
%oaborat
ory Reoort M. I. T., June 1t 5.
'::
....
o.:)ne
J.A,, Discharre Coefficiens
andSteady-
:;tate
!ow
for Hydrauic Ponpet Valve--
;s
IFo
-s
5MBo.,
Journ-al
a of F3a
Marcn I960 (1:44.
. sai
TH.
and
Esngine ring
Volume
.,
dy, E 0 , Dynamic Behavior of
ACMEpaper
a
Pneumat c ?ressure Redaucer,
a Simole
WA- be&.
4 .Fen
T Y.,
J : and Dnamni. Characterstics
ctions
M
a
Ic:
z -T Vaves
Va e s
of Flapr
ol
(i,81).
. awiak,
Fa pe r
' tabilitiy of a neuma
t
,,
Valve, Course notes, J,7d, M.E. nept. M.I.T.
Ainsworth,F. ,
:6
.EffC
et
of O '- Column Acousti
Resonancla
Hjdraui.ic
Valv e
on, HydResonanc,
Iran za cs~f~
i.o on,
.
Tn to K3'3 (773).
f~y
F1:nk,
7*
tabi.lity,
The C<i.tt - ;
....re.e
9 M.
urvyI
AS4tE oaor,
-a
FluA
alves
-
jq-U-.
Fy I
Tyr .ai..v,
a.i..
sanient
Tr1
M
For es on Hydrlic
N...
1,.~,
..
6,1
Serwtir;.
It
M.E. De3t. oM.
la'ckburn, .iRee
tof an d "1ea- r
d
anu
JhYnW
Ton-,
r Sons,
"-on, . ,~~~~~~~
rIfe
and
~s:; and John W~~~~~~~~~ie~,
ower'
i
Jont'ol
Zd. Pejhnolom
I~lll.pl~~l~ll~~.^'PI-·III···P·_-·LP
ASME
D
..
Freuden;•: . c' , J von, The Chattering of .aety
ind
ism-:
aMe.1.nsnLs,
The Frown Boeri Re
.,¢y/J
-P.
:
J.;;, BTpet V'alve
JL2i.
/!,,
Sq uel
:
·
l.-L-_^._... -------. - L____·li.--rYIIY-LL_·I--_L--·L---LIII--III_-ILIII
--
_~__________I_.1·111_._
.--
~~~-~~~~~
MlTLibraries
Document Services
Room 14-0551
77 Massachusetts Avenue
Cambridge, MA 02139
Ph: 617.253.5668 Fax: 617.253.1690
Email: docs@mit.edu
http://libraries.mit.edu/docs
DISCLAIMER OF QUALITY
Due to the condition of the original material, there are unavoidable
flaws in this reproduction. We have made every effort possible to
provide you with the best copy available. If you are dissatisfied with
this product and find it unusable, please contact Document Services as
soon as possible.
Thank you.
Some pages in the original document contain pictures,
graphics, or text that is illegible.
.caa-Y·;·ssupaPIrurr;mu-ulCappa(-
lurCIXs.P·L··i-siY"UTPLiC16·IYiYIIYII
-
_I·____
_Il^·_____X__1I__I___ll__
·II-C4P----PI·IIPs-
--· ----1