Analysis of High-Dimensional Signal Data by Manifold Learning and Convolution Transforms
advertisement

Analysis of High-Dimensional Signal Data by
Manifold Learning and Convolution Transforms
Mijail Guillemard and Armin Iske
University of Hamburg
Alba di Canazei, 6-9 September 2010
DRWA2010
6-9 September 2010
Armin Iske
1
Outline
Application from Neuro and Bioscience
Electromyogram (EMG) Signal Analysis
Objectives and Problem Formulation
Manifold Learning and Convolution Transforms
Some more Background
Dimensionality Reduction: PCA, MDS, and Isomap
Differential Geometry: Curvature Analysis
Numerical Examples
Parameterization of Scale- and Frequency-Modulated Signals
Manifold Evolution under Wave Equation
Geometrical and Topological Distortions through Convolutions
DRWA2010
6-9 September 2010
Armin Iske
2
EMG Signal Analysis in Neuro and Bioscience
An EMG signal is an electrical measurement combining multiple
action potentials propagating along motor neural cells.
EMG signal analysis provides ...
... physiological information about muscle and nerve interactions.
Applications:
diagnosis of neural diseases, athletic performance analysis.
Goal: Develop fast and accurate
methods to EMG signal analysis.
Tools:
Dimensionality Reduction;
Manifold Learning.
Peggy busy weight lifting.
Collaborators:
Deutscher Olympia-Stützpunkt Rudern, Hamburg
Prof. Klaus Mattes (Bewegungs- und Trainingswissenschaft, UHH)
DRWA2010
6-9 September 2010
Armin Iske
3
Action Potential and Surface EMG
DRWA2010
6-9 September 2010
Armin Iske
4
Objectives and Problem Formulation
Manifold Learning by Dimensionality Reduction.
Input data: X = {x1 , . . . , xm } ⊂ M ⊂ Rn ;
Hypothesis:
Y = {y1 , . . . , ym } ⊂ Ω ⊂ Rd , d n;
nonlinear embedding map A : Ω → Rn , X = A(Y );
Task: Recover Y (and Ω) from X .
/ X ⊂ M ⊂ Rn
nn
nnn
n
n
nn
wnnn P
Rd ⊃ Ω ⊃ Y
A
Ω0 ⊂ R d
DRWA2010
6-9 September 2010
Armin Iske
5
Objectives and Method Description
DRWA2010
6-9 September 2010
Armin Iske
6
Manifold Learning Techniques
Geometry-based Dimensionality Reduction Methods.
Principal Component Analysis (PCA)
Multidimensional Scaling (MDS)
Isomap
Supervised Isomap
Local Tangent Space Alignment (LTSA)
Riemannian Normal Coordinates (RNC, 2005)
DRWA2010
6-9 September 2010
Armin Iske
7
Principal Component Analysis (PCA)
Problem:
n
n
Given points X = {xk }m
k=1 ⊂ R , find closest hyperplane H ⊂ R to X ,
n
n
i.e., find orthogonal projection P : R → R , with rank(P) = p < n,
minimizing
m
X
d(P, X ) =
kxk − P(xk )k2
k=1
DRWA2010
6-9 September 2010
Armin Iske
8
Principal Component Analysis (PCA)
Theorem: Let X = (x1 , . . . , xm ) ∈ Rn×m be scattered with zero mean,
m
1 X
xk = 0.
m
k=1
Then, for an orthogonal projection P : Rn → Rn , with rank(P) = p < n,
are equivalent:
(a) The projection P minimizes the distance
d(P, X ) =
m
X
kxk − P(xk )k2 .
k=1
(b) The projection P maximizes the variance
var(P(X )) =
m
X
kP(xk )k2 .
k=1
(c) The matrix representation of the projection P is spanned by p
eigenvectors of the p largest eigenvalues of the covariance matrix
XX T ∈ Rn×n .
DRWA2010
6-9 September 2010
Armin Iske
9
Principal Component Analysis (PCA)
Proof: By the Pythagoras Theorem, we have
kxk k2 = kxk − P(xk )k2 + kP(xk )k2
and so
d(P, X ) =
m
X
for k = 1, . . . , m
kxk k2 − var(P(X )).
k=1
Therefore, minimizing d(P, X ) is equivalent to maximizing var(P(X )),
i.e., characterizations (a) and (b) are equivalent.
To study property (c), let v1 , . . . , vp ⊂ Rn denote an orthonormal set of
vectors, such that
p
X
P(xk ) =
< vi , xk > vi
i=1
and therefore
var(P(X )) =
m
X
2
kP(xk )k =
k=1
DRWA2010
6-9 September 2010
p
m X
X
| < vi , xk > |2 .
k=1 i=1
Armin Iske
10
Principal Component Analysis (PCA)
Now,
m
X
| < vi , xk > |2
=
k=1
m
X
< vi , xk >< xk , vi >
k=1
*
vi ,
=
*
=
vi ,
m
X
k=1
m
X
+
xk < xk , vi >
xk
n
X
+
xjk vji
j=1
k=1
For the covariance matrix
S = XX T =
m
X
!
x`k xjk
k=1
we obtain
(Svi )` =
n X
m
X
x`k xjk vji =
j=1 k=1
DRWA2010
6-9 September 2010
1≤`,j≤n
m
X
k=1
x`k
n
X
xjk vji
j=1
Armin Iske
11
Principal Component Analysis (PCA)
Therefore,
m
X
| < vi , xk > |2 =< vi , Svi >
k=1
and so
var(P(X )) =
m
X
kP(xk )k2 =
p
X
< vi , Svi >
i=1
k=1
Now, maximizing var(P(X )) is equivalent to select p eigenvectors
v1 , . . . , vp corresponding to the p largest eigenvalues of S.
The latter observation relies on the following
Lemma: Let S ∈ Rn×n be a symmetric matrix. Then, the function
W (v ) =< v , Sv >
for v ∈ Rn with kv k = 1
attains its maximum at an eigenvector of S corresponding to the largest
eigenvalue of S.
Proof: Exercise.
DRWA2010
6-9 September 2010
Armin Iske
12
Principal Component Analysis (PCA)
Conclusion.
In order to compute P minimizing d(P, X ), perform the following steps
(a) Compute the singular value decomposition of X , so that
X = UDV T , with a diagonal matrix D containing the singular values
of X , and U, V unitary matrices.
(b) So obtain
XX T = U(DD T )U T
the eigendecomposition of the covariance matrix XX T .
(c) Take the p (orthonormal) eigenvectors v1 , . . . , vp in U corresponding
to the p largest singular values in DD T , and so obtain the required
projection
p
X
P(x) =
< x, vi > vi .
i=1
DRWA2010
6-9 September 2010
Armin Iske
13
Multidimensional Scaling (MDS)
Problem (MDS):
Given distance matrix
DX = (kxi − xj k2 )1≤i,j≤m ∈ Rm×m
of X = (x1 . . . xm ) ∈ Rn×m , find Y = (y1 . . . ym ) ∈ Rp×m minimizing
d(Y , D) =
m
X
(dij − kyi − yj k2 ).
i,j=1
DRWA2010
6-9 September 2010
Armin Iske
14
Multidimensional Scaling (MDS)
Solution to Multidimensional Scaling Problem.
Theorem: Let D = (kxi − xj k2 )1≤i,j≤m ∈ Rm×m be a given distance
matrix of X = (x1 , . . . , xm ) ∈ Rn×m with
m
1 X
xi = 0.
m
i=1
Then, the matrix X can (up to orthogonal transformation) be recovered
from D by
p
p
Y = diag( λ1 , . . . , λm )U T ,
where λ1 ≥ . . . ≥ λm ≥ 0 and U ∈ Rm×n are the corresponding
eigenvalues and eigenvectors of the matrix
1
XX T = − JDJ
2
with J = I − (1/m)ee T
where e = (1, . . . , 1)T ∈ Rm .
DRWA2010
6-9 September 2010
Armin Iske
15
Multidimensional Scaling (MDS)
Proof (sketch): Note that
dij = kxi − xj k2 = (xi , xi ) − 2(xi , xj ) + (xj , xj ).
This implies the relation
D = Ae T − 2XX T + eAT
for A = [(x1 , x1 ), . . . , (xm , xm )]T ∈ Rm . Now regard
J = Im − (1/m)ee T ∈ Rm×m . Since Je = 0, the above relation implies
1
XX T = − JDJ.
2
Therefore, the eigendecomposition of XX T = Udiag(λ1 , . . . , λm )U T
allows us to recover X , up to orthogonal transformation, by
p
p
Y = diag( λ1 , . . . , λm )U T .
DRWA2010
6-9 September 2010
Armin Iske
16
Dimensionality Reduction by Isomap
From Multidimensional Scaling to Isomap.
Example: Regard the Swiss roll data, sampled from the surface
f (u, v ) = (u cos(u), v , u sin(u))
DRWA2010
for u ∈ [3π/2, 9π/2], v ∈ [0, 1].
6-9 September 2010
Armin Iske
17
Dimensionality Reduction by Isomap
Isomap Strategy.
Neighbourhood graph construction.
Define a graph where each vertex is a data point, and each edge
connects two points satisfying an -radius or k-nearest neighbour
criterion.
Geodesic distance construction.
Compute the geodesic distance between each point pair (x, y ) by
using the length of shortest path from x to y in the graph.
d-dimensional embedding.
Use the geodesic distances for computing a d-dimensional
embedding as in the MDS algorithm.
DRWA2010
6-9 September 2010
Armin Iske
18
Dimensionality Reduction by Isomap
DRWA2010
6-9 September 2010
Armin Iske
19
Curvature Analysis for Curves
Curvature of Curves.
For a curve r : I → Rn with arc-length parametrization:
Zt
kr 0 (x)k dx
s(t) =
a
its curvature is
κ(s) = kr 00 (s)k
For a curve r : I → Rn with arbitrary parametrization we have
κ2 (r ) =
DRWA2010
kr̈ k2 kṙ k2 − hr̈ , ṙ i2
(kṙ k2 )3
6-9 September 2010
Armin Iske
20
Curvature Analysis for Manifolds
Computation of the Scalar Curvature for Manifolds.
∂ ∂
,
i
∂xi ∂xj
m 1 X ∂gj` ∂gi` ∂gij
k
Christoffel symbols : Γij =
+
−
g `k
2
∂xi
∂xj
∂x`
Metric Tensor : gij (p) = h
Curvature Tensor : R ` ijk =
`=1
m
X
(Γjkh Γih` − Γikh Γjh` ) +
h=1
Ricci Tensor : Rijk` =
m
X
h
Rijk
g`h ,
h=1
Scalar Curvature : κ =
m
X
Rij =
∂Γjk`
∂Γ `
− ik
∂xi
∂xj
m
X
g k` Rkij` =
k,`=1
m
X
k
Rkij
k=1
g ij Rij
i,j=1
DRWA2010
6-9 September 2010
Armin Iske
21
Curvature Distortion and Convolution
Regard the convolution map T on manifold M,
MT = {T (x), x ∈ M}
T (x) = x ∗ h,
h1
h2
h3
.
.
.
T =
hm
0
..
.
0
Curvature (for curves):
DRWA2010
0
h1
h2
..
.
hm−1
hm
..
.
0
κ2T (r ) =
6-9 September 2010
...
...
...
...
...
...
...
...
h = (h1 , . . . , hm )
0
0
0
..
.
h1
h2
..
.
hm
kT r̈ k2 kT ṙ k2 − hT r̈ , T ṙ i2
(kT ṙ k2 )3
Armin Iske
22
Modulation Maps and Modulation Manifolds
A modulation map is defined for α = (α1 , . . . , αd ) ∈ Ω, and
{ti }ni=1 ⊂ [0, 1]:
A:Ω→M
Aα (ti ) =
d
X
φk (αk ti ) for 1 ≤ i ≤ n,
k=1
(Ω ⊂ Rd and M ⊂ Rn manifolds, dim(Ω) = dim(M), d < n).
Example: Scale modulation map
Aα (ti ) =
d
X
exp(αk (ti ) − bk )2
for 1 ≤ i ≤ n.
k=1
Example: Frequency modulation map
Aα (ti ) =
d
X
sin(αk ti + bk )
for 1 ≤ i ≤ n.
k=1
DRWA2010
6-9 September 2010
Armin Iske
23
Numerical Example 1: Curvature Distortion
Low dimensional
Parameterization of Scale
Modulated Signals.
P3
2
−α
(t)(·−b
)
i
,α ∈ Ω
X = fαt = i=1 e i
Ω = αt = (α1 (t), α2 (t), α3 (t)), t ∈ [t0 , t1 ]
X = {fα , α ∈ Ω}
fα
Ω ⊂ R3
DRWA2010
6-9 September 2010
X ⊂ R64
Armin Iske
24
Numerical Example 1: Curvature Distortion
Low dimensional Parameterization of Scale Modulated Signals.
/ Vj+2
Multiresolution Vj E / Vj+1
II
EE
I
EE
II
"
$
Wj+1
Wj+2
...
...
V8 ⊕ W8 ⊕ W16 ⊕ W32 = V64
Ω ⊂ R3
DRWA2010
X ⊂ R64
6-9 September 2010
T (X ) ⊂ R64
Armin Iske
25
Numerical Example 1: Curvature Distortion Evolution
Manifold Evolution under a PDE
2
∂2 u
2∂ u
Wave Equation
=
c
(WE)
∂t 2
∂x 2
Ut = uα (t, x), uα solution of (WE) with initial condition fα , α ∈ Ω0
uα0 (t, x), (t, x) ∈ [t0 , t1 ] × [x0 , x1 ]
DRWA2010
6-9 September 2010
X0 Xt
Armin Iske
26
Example 2: Curvature Distortion - Frequency Modulation
Frequency Modulation.
A : Ω ⊂ Rd → M ⊂ Rn
α1 (u, v ) = (R + r cos v ) cos u
α2 (u, v ) = (R + r cos v ) sin u
A
−−−→
Aα (ti ) =
P3
k=1
sin((α0k + γαk )ti )
α3 (u, v ) = r sin v
Aα (t)
DRWA2010
Frequency Content of Aα (t)
6-9 September 2010
Armin Iske
27
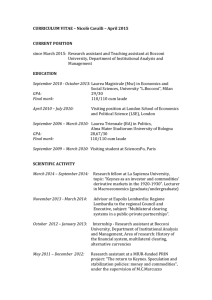
Example 2: Curvature Distortion - Frequency Modulation
Torus Deformation.
A : Ω ⊂ Rd → M ⊂ R n
Modulation Map
Torus Ω ⊂ R3
PCA 3D Projection : P(M) = Ω 0
P(M) : PCA 3D Projection of M ⊂ R256
Scalar Curvature of M ⊂ R256
DRWA2010
P : M ⊂ Rn → Ω 0 ⊂ R3
Scalar Curvature of P(M) ⊂ R3
6-9 September 2010
Armin Iske
28
Example 2: Curvature Distortion - Frequency Modulation
PCA Distortion for high frequency bandwidths γ.
Aα (ti ) =
3
X
sin((α0k + γαk )ti )
k=1
Isomap 3d Projection of M
DRWA2010
6-9 September 2010
PCA 3d Projection of M
Armin Iske
29
Example 3: Topological Distortion
band3
Torus (Genus 1 and Genus 2).
0.01
0.005
0
ftorus12
−0.005
−0.01
0.01
−0.02
−0.015
0.02
0.005
−0.01
0.01
0
0
−0.01
0.01
−0.02
0
band4
−0.005
0.015
−0.01
−0.02
0.01
0
−0.015
−0.01
0.005
−0.005
0
0.005
0.01
0.015
0.02
0
−0.005
−0.01
0.01
0
−0.01
−0.02
DRWA2010
6-9 September 2010
−0.015
−0.01
−0.005
Armin Iske
0
0.005
0.01
0.015
30
Literature
Relevant Literature.
M. Guillemard and A. Iske (2010)
Curvature Analysis of Frequency Modulated Manifolds in
Dimensionality Reduction. Calcolo.
Published online, 21st Sept. 2010, DOI: 10.1007/s10092-010-0031-8.
M. Guillemard and A. Iske (2009)
Analysis of High-Dimensional Signal Data by Manifold Learning and
Convolutions. In: Sampling Theory and Applications (SampTA’09),
L. Fesquet and B. Torrésani (eds.), Marseille, May 2009, 287–290.
Further up-to-date material, including slides and code, are accessible
through our homepages
http://www.math.uni-hamburg.de/home/guillemard/ and
http://www.math.uni-hamburg.de/home/iske/.
DRWA2010
6-9 September 2010
Armin Iske
31