Localized Patterns in the Gray-Scott Model Stability
advertisement

Localized Patterns in the Gray-Scott
Model
An Asymptotic and Numerical Study of Dynamics and
Stability
by
Wan Chen
B.Sc., Wuhan University, China, 2003
Ph.D, The University of British Columbia, Canada, 2009
A THESIS SUBMITTED IN PARTIAL FULFILLMENT OF
THE REQUIREMENTS FOR THE DEGREE OF
DOCTOR OF PHILOSOPHY
in
The Faculty of Graduate Studies
(Mathematics)
THE UNIVERSITY OF BRITISH COLUMBIA
(Vancouver)
May, 2009
c Wan Chen 2009
Abstract
Localized patterns have been observed in many reaction-diffusion systems.
One well-known such system is the two-component Gray-Scott model, which
has been shown numerically to exhibit a rich variety of localized spatiotemporal patterns including, standing spots, oscillating spots, self-replicating
spots, etc. This thesis concentrates on analyzing the localized pattern formation in this model that occurs in the semi-strong interaction regime where
the diffusivity ratio of the two solution components is asymptotically small.
In a one-dimensional spatial domain, two distinct types of oscillatory
instabilities of multi-spike solutions to the Gray-Scott model that occur
in different parameter regimes are analyzed. These two instabilities relate
to either an oscillatory instability in the amplitudes of the spikes, or an
oscillatory instability in the spatial locations of the spikes. In the latter case
a novel Stefan-type problem, with moving Dirac source terms, is shown to
characterize the dynamics of a collection of spikes. From a numerical and
analytical study of this problem, it is shown that an oscillatory motion in the
spike locations can be initiated through a Hopf bifurcation. In a subregime
of the parameters it is shown that this Stefan-type problem is quasi-steady,
allowing for the derivation of an explicit set of ODE’s for the spike dynamics.
In this subregime, a nonlocal eigenvalue problem analysis shows that spike
amplitude oscillations can occur from another Hopf bifurcation.
In a two-dimensional domain, the method of matched asymptotic expansions is used to construct multi-spot solutions by effectively summing
an infinite-order logarithmic expansion in terms of a small parameter. An
asymptotic differential algebraic system of ODE’s for the spot locations is
derived to characterize the slow dynamics of a collection of spots. Furthermore, it is shown theoretically and from the numerical computation of certain eigenvalue problems that there are three main types of fast instabilities
for a multi-spot solution. These instabilities are spot self-replication, spot
annihilation due to overcrowding, and an oscillatory instability in the spot
amplitudes. These instability mechanisms are studied in detail and phase
diagrams in parameter space where they occur are computed and illustrated
for various spatial configurations of spots and several domain geometries.
ii
Table of Contents
Abstract
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
ii
Table of Contents . . . . . . . . . . . . . . . . . . . . . . . . . . . .
iii
List of Tables
vi
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
List of Figures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . vii
Acknowledgements . . . . . . . . . . . . . . . . . . . . . . . . . . .
ix
Dedication
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
x
1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.1 Turing Patterns . . . . . . . . . . . . . . . . . . . . . . . . .
1.2 Experimental and Numerical Evidence of Spot Patterns . . .
1.3 A Brief History of the Gray-Scott Model . . . . . . . . . . .
1.4 Methodology . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.4.1 Turing Stability Analysis . . . . . . . . . . . . . . . .
1.4.2 Weakly Nonlinear Theory . . . . . . . . . . . . . . . .
1.4.3 Techniques for Localized Spike and Spot Patterns . .
1.5 Literature Review: Localized Spot Patterns for ReactionDiffusion Systems . . . . . . . . . . . . . . . . . . . . . . . .
1.5.1 Analysis in a One-Dimensional Domain . . . . . . . .
1.5.2 Analysis in a Two-Dimensional Domain . . . . . . . .
1.6 Objectives And Outline . . . . . . . . . . . . . . . . . . . . .
1.6.1 Thesis Outline: the GS Model in a 1-D Domain . . .
1.6.2 Thesis Outline: the GS Model in a 2-D Domain . . .
1
2
3
4
6
7
8
9
2 Dynamics and Oscillatory Instabilities of Spikes in
GS Model . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1 The Dynamics of k-Spike Quasi-Equilibria . . . . .
2.1.1 Multi-Spike Quasi-Equilibria . . . . . . . . .
10
11
17
19
19
22
the 1-D
. . . . . 29
. . . . . 29
. . . . . 32
iii
Table of Contents
2.2
2.3
2.4
Oscillatory Profile Instabilities of k-Spike Quasi-Equilibria
2.2.1 Numerical Experiments . . . . . . . . . . . . . . .
Oscillatory Drift Instabilities of k-Spike Patterns . . . . .
2.3.1 Coupled ODE-PDE Stefan Problem . . . . . . . .
2.3.2 Oscillatory Drift Instabilities . . . . . . . . . . . .
2.3.3 Integral Equation Formulation . . . . . . . . . . .
Discussion . . . . . . . . . . . . . . . . . . . . . . . . . .
3 Dynamics and Spot-Replication: The 2-D GS Model
3.1 k-spot Quasi-Equilibrium Solutions . . . . . . . . . . .
3.2 The Spot-Splitting Instability . . . . . . . . . . . . . .
3.3 The Slow Dynamics of Spots . . . . . . . . . . . . . . .
3.4 The Direction of Splitting . . . . . . . . . . . . . . . . .
3.5 Two-Spot Patterns in an Infinite Domain . . . . . . . .
3.6 The Reduced-Wave and Neumann Green’s Functions .
3.6.1 Green’s Function for a Unit Disk . . . . . . . . .
3.6.2 Neumann Green’s Function for a Unit Disk . . .
3.6.3 Green’s Function for a Rectangle . . . . . . . .
3.6.4 Neumann Green’s Function for a Rectangle . . .
3.7 Comparison of Theory with Numerical Experiments . .
3.7.1 The Unit Square . . . . . . . . . . . . . . . . . .
3.7.2 The Unit Disk . . . . . . . . . . . . . . . . . . .
3.8 Discussion . . . . . . . . . . . . . . . . . . . . . . . . .
4 Competition and Oscillatory Profile Instabilities . .
4.1 Eigenvalue Problem for the Mode m = 0 . . . . . . .
4.1.1 Numerical Methods for the Eigenvalue Problem
4.2 Nonlocal Eigenvalue Analysis . . . . . . . . . . . . . .
4.2.1 A One-spot Solution in an Infinite domain . .
4.2.2 Multi-Spot Patterns in a Finite Domain . . . .
4.2.3 Comparison of the Quasi-Equilibrium Solutions
4.2.4 Comparison of the Eigenvalue Problem . . . .
4.3 Instabilities in an Unbounded Domain . . . . . . . . .
4.3.1 A One-Spot Solution . . . . . . . . . . . . . .
4.3.2 A Two-Spot Solution . . . . . . . . . . . . . .
4.4 A One-Spot Solution in a Finite Domain . . . . . . .
4.4.1 A One-Spot Solution in the Unit Disk . . . . .
4.4.2 A One-Spot Solution in a Square . . . . . . .
4.5 Symmetric k−Spot Patterns in a Finite Domain . . .
4.5.1 A Symmetric Circulant Matrix . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. 59
. 59
. 67
. 70
. 74
. 79
. 82
. 82
. 85
. 86
. 87
. 87
. 88
. 93
. 101
. . .
. . .
. .
. . .
. . .
. . .
. .
. . .
. . .
. . .
. . .
. . .
. . .
. . .
. . .
. . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
35
40
43
48
52
55
57
104
104
110
112
112
114
118
120
122
124
127
131
131
134
136
136
iv
Table of Contents
4.6
4.5.2 A Ring of Spots in the Unit Disk . . . . . . . . . . . 138
Discussion . . . . . . . . . . . . . . . . . . . . . . . . . . . . 145
5 Conclusions and Future Work . . . . . . . . . . . . . . . .
5.1 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . .
5.2 Application to Other Systems . . . . . . . . . . . . . . .
5.2.1 Localized Patterns in Cardiovascular Calcification
5.2.2 The Brusselator Model with Superdiffusion . . . .
5.2.3 A Three-Component Reaction-Diffusion System .
5.2.4 A General Class of Reaction-Diffusion Models . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
148
148
151
151
152
152
153
Bibliography . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 155
v
List of Tables
3.1
3.2
3.3
3.4
4.1
Correction terms and accuracy for the reduced-wave Green’s
function . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Data for Experiment 3.3: . . . . . . . . . . . . . . . . . . . .
Data for Experiment 3.4 . . . . . . . . . . . . . . . . . . . . .
Data for Experiment 3.5 . . . . . . . . . . . . . . . . . . . . .
85
89
91
93
Equilibrium ring radius for a two-spot symmetric pattern in
the unit disk . . . . . . . . . . . . . . . . . . . . . . . . . . . 138
vi
List of Figures
1.1
1.2
1.3
1.4
FIS experiment: Spot self-replication . . . . . . . . . .
Different types of instabilities of spike solutions . . . .
Slow dynamics of two-spike quasi-equilibrium solutions
Spot self-replication for the GS model . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
6
14
20
26
2.1
2.2
2.3
2.4
2.5
2.6
Slow evolution of a two-spike pattern . . . . . . . . . .
Slow evolution of a three-spike pattern . . . . . . . . .
Drift instability threshold . . . . . . . . . . . . . . . .
Testing the stability threshold for a one-spike pattern
Large-scale oscillation of a one-spike pattern . . . . . .
Oscillatory drift instability and the breather mode . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
42
44
48
53
54
55
3.1
3.2
3.3
3.4
3.5
3.6
Numerical solution of the core problem (3.2) . . . . . . . . . . 60
One spot in a square: saddle node bifurcation . . . . . . . . . 63
Eigenvalue of (3.25) with modes m ≥ 2 . . . . . . . . . . . . . 69
Two spots in the infinite plane . . . . . . . . . . . . . . . . . 81
A three-spot pattern: slow drifting spots . . . . . . . . . . . . 89
Comparison of asymptotic and numerical results for the dynamics of a three-spot pattern . . . . . . . . . . . . . . . . . . 90
A three-spot pattern: self-replication . . . . . . . . . . . . . . 92
Comparison of asymptotic and numerical results for the dynamics of a four-spot pattern after a spot-splitting event . . . 92
An asymmetric four-spot pattern: two self-replication events
94
Comparison of asymptotic and numerical results for the dynamics of a four-spot pattern after two spot-splitting events . 94
Symmetric pattern: all k spots on a ring in a unit circle . . . 96
Four spots on a ring: spot-replication . . . . . . . . . . . . . 97
One center-spot and all other spots on a ring . . . . . . . . . 99
One center-spot and three spots on a ring: different splitting
patterns . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
One center-spot and three spots on a ring: different splitting
patterns . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
3.7
3.8
3.9
3.10
3.11
3.12
3.13
3.14
3.15
vii
List of Figures
3.16 One center-spot and nine spots on a ring: dynamical splitting
instability . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
4.1
4.2
4.3
4.4
4.5
4.6
4.7
4.8
4.9
4.10
4.11
4.12
4.13
4.14
4.15
4.16
4.17
Principal eigenvalue of (4.2) with Nj bounded at infinity . . . 107
Eigenfunctions Φj and Nj of (4.2) with Nj bounded at infinity108
One-spot solution in the infinite plane: phase diagram and
spectrum . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
One-spot solution in the infinite plane: Comparison with results from NLEP theory . . . . . . . . . . . . . . . . . . . . . 126
Two-spot solution in the infinite plane: Phase diagram . . . . 129
One-spot solution in the unit disk: dynamical profile instability133
One-spot solution in the unit disk: a test of the profile instability threshold with A = 0.16, D = 4 . . . . . . . . . . . . . 133
One-spot solution in the unit disk: a test of the profile instability threshold with A = 0.16, D = 6 . . . . . . . . . . . . . 134
One-spot solution in the unit square: Dynamical profile instability . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 135
One-spot solution in the unit square: a test of the dynamical
profile instability . . . . . . . . . . . . . . . . . . . . . . . . . 135
Two spots on a ring: a dynamical competition instability . . 139
Two spots on a ring: in-phase oscillation threshold . . . . . . 140
Two spots on a ring: a competition instability . . . . . . . . . 140
Two spots on a ring: a competition instability . . . . . . . . . 143
Two spots on a ring: the spot amplitudes . . . . . . . . . . . 144
Two spots on a ring: the phase diagram . . . . . . . . . . . . 145
k spots with k > 2 on a ring: the phase diagram . . . . . . . 146
viii
Acknowledgements
This thesis presents the work under the supervision of Dr. Michael Ward, I
would like to thank him for his great guidance, support and encouragement.
Also I would like to thank Dr. Brian Wetton for his useful suggestions and
help. Finally, I would like to thank Prof. Juncheng Wei of the Chinese University of Hong Kong for some helpful discussions on the theory of nonlocal
eigenvalue problems.
ix
To my dear parents and my husband
x
Chapter 1
Introduction
Various patterns have been observed in the physical world, such as spot or
stripe patterns on animal skins, spiral waves in the Belousov-Zhabotinsky
(BT) reaction, among many others. In 1952, the British mathematician
Alan Turing [90] first proposed a simple reaction-diffusion system describing chemical reaction and diffusion to account for morphogenesis, i.e. the
development of patterns in biological systems. This study is the foundation
of modern pattern formation. In [90], Turing employed linear analysis to
determine the threshold for the instability of spatially homogeneous equilibrium solutions of general two-component reaction-diffusion systems; a more
specific summary of his work is discussed in §1.1. Turing’s original study has
stimulated numerous theoretical and numerical studies of reaction-diffusion
systems, which focus on pattern formation from a spatially uniform state
that is near the transition from linear stability to linear instability. It was
suggested in 1972 by Gierer et. al. [31] and Segel et.al. [83] that two key ingredients for localization are positive feedback of the activator, which results
in a self-production of activator substance, and a long-range inhibiting substance, which suppresses the growth of activator. It is these two competing
processes that give rise to different patterns.
In 1993, Pearson [77] observed that for parameter values far from the
Turing instability regime, the Gray-Scott model (cf. [35]) in a two-dimensional
spatial domain can exhibit a rich variety of spatio-temporal patterns including, stationary spots, traveling spots, spot self-replication, spot-annihilation,
growing stripes, labyrinthian patterns , stripe filaments, and spatial-temporal
chaos, etc. The common feature in all of these patterns is that each consists of two distinct states of solutions: some localized regions where the
chemical concentrations are very large, and a background ambient spatially
homogeneous state. As time evolves, the localized regions of elevated chemical concentrations can remain stable, or develop very complicated structures
through drifting, splitting, breaking, etc., driven by intricate and unknown
mechanisms that depend on the range of parameters in the reaction-diffusion
model. The stability and dynamics of these localized patterns can not be
analyzed by Turing’s approach based on a linearization around a spatially
1
1.1. Turing Patterns
homogeneous equilibrium state.
A detailed mathematical study of these localized structures could have
significant applications in controlling chemical reactions for certain purposes,
and in understanding and classifying patterns in biological systems. One example is the self-organized formation of either labyrinths, spots, or stripe
patterns in the calcification and mineralization of cardiovascular stem cells,
described by a prototype Gierer-Meinhardt model (cf. [105]). Another example is the stable or oscillatory spots arising in the BZ reaction in a closed
system in which the reactants are mixed with octane and the surfactant
aerosol OT (BZ-AOT) (cf. [41]). This reaction can be fabricated to design
a re-writable memory device (cf. [41]).
Over the past decade there has been a more systematic effort to undertake detailed numerical and theoretical studies of the dynamics and stability of localized patterns in reaction-diffusion systems. In this introductory
chapter, in §1.1 we first review the pioneering work of Turing on stationary, spatially periodic patterns, resulting from the interplay between pure
diffusion and nonlinear reaction kinetics. Some experimental and numerical
evidence of spot patterns and spot self-replication behavior are provided in
§1.2. A brief history of the Gray-Scott model is given in §1.3. The various
theoretical approaches for analyzing pattern formation are outlined in §1.4.
Previous theoretical work for the existence, stability, and dynamics for oneand two-dimensional reaction-diffusion models are surveyed in §1.5. Finally
in §1.6, we give an outline of this thesis and briefly highlight the analytical
and numerical approaches that we have employed.
1.1
Turing Patterns
A typical two-component reaction-diffusion (RD) system has the form
τA At = DA ∆A + F (A, H) ,
τH Ht = DH ∆H + G(A, H) ,
x ∈ Ω;
x ∈ Ω;
∂n A = 0 ,
∂n H = 0 ,
x ∈ ∂Ω ,
x ∈ ∂Ω .
(1.1a)
(1.1b)
Such two-component, and even multi-component, systems arise in many
physical applications including, chemical reaction theory with autocatalysis, solid combustion theory, biological morphogenesis, population dynamics
with spatial segregation, semiconductor gas-discharge systems, etc..
In many specific systems, A and H are the concentrations of activator
and inhibitor, respectively; DA and DH are the corresponding diffusion coefficients; τA and τH represent the corresponding reaction-time constants; F
2
1.2. Experimental and Numerical Evidence of Spot Patterns
and G are the nonlinear reaction kinetics. This system has a spatially homogeneous equilibrium solution AE , HE when F (AE , HE ) = G(AE , HE ) = 0.
If we ignore the diffusion terms, and only consider the temporal evolution
of A and H, then the Jacobian matrix of the kinetics determines the linear
stability of this spatially homogeneous solution AE and HE . However, in the
presence of diffusion, the criteria for instability becomes more complicated.
In 1952, Alan Turing (cf. [90]) studied (1.1) mathematically, and proposed that spatial concentration patterns could arise from an initial arbitrary
configuration due to the interaction of reaction and diffusion, which are now
known as Turing patterns. Then he hypothesized that such structures could
play a role in the formation of patterns of leaf buds, skin markings and
limbs, etc.
The first experimental observation of Turing patterns occurred almost
40 years later. In [75] it was reported that a chlorite-iodide-malonic acid
(CIMA) reaction can support either hexagonal, striped, or mixed, patterns
that emerge spontaneously from an initially uniform background, and then
remain stationary after propagating for a period of time. These results
provided experimental evidence of Turing patterns that can be maintained
indefinitely in a well-defined non-equilibrium state. In 1995, Kondo and
Asai [58] identified that the skin pattern of a certain species of angelfish also
developed according to Turing’s instability mechanism.
1.2
Experimental and Numerical Evidence of
Spot Patterns in Reaction-Diffusion Systems
The motivation behind much theoretical work on localized pattern formation
arises from the diverse laboratory and physical applications where localized
patterns occur, and from the many supporting numerical simulations of
various RD systems. A survey of experimental and theoretical studies of localized spot patterns through reaction-diffusion modeling in various physical
or chemical contexts is given in [92]. Since we are particularly interested in
spot patterns (or spike patterns in a one-dimensional spatial domain) and
the phenomena of self-replicating spots, the following examples in this section are carefully chosen to demonstrate the existence of spot patterns in
various models.
One example of localized spot patterns is for a certain semiconductor
gas-discharge system (cf. [3] [4] [5]), which is modeled by a three-component
reaction-diffusion system by Schenk et. al. (cf. [80]). In the laboratory experiment, when the current exceeds a certain critical value, the differential
3
1.3. A Brief History of the Gray-Scott Model
resistance of the gas discharge domain becomes negative, and the homogeneous state is then destabilized, which leads to spatio-temporal structures
such as the birth, death, and scattering of localized regions of high current
density. The experimental figures can be found in [4] and [5].
Our second example concerns in vitro experiments that show that vascularderived mesenchymal stem cells can display self-organized calcified patterns
such as labyrinths, stripes, and spots (cf. [30] [105]). In these experiments,
the bone morphogenetic protein 2 (BMP-2) acts as an activator, and the matrix GLA protein (MGP) acts as the inhibitor, which is altered by external
addition of MGP.
Spot-replication patterns are also observed in numerical simulations of
a wide range of RD systems. Muratov and Osipov [61] have performed an
extensive numerical study of a prototype two-dimensional system with cubic
nonlinearity. The activator nullcline has an ’N’-shape, which determines the
properties of patterns and self-organization scenarios. When the ratio of
diffusion coefficients and reaction-time constants satisfy DA /DH ≪ 1 and
τA /τH ≪ 1, the self-replication event of a single spot is numerically studied
in Fig. 10 of [61]. In addition, it has been shown numerically that above a
critical temperature, a certain mathematical model of a diblock copolymer
melt can exhibit localized patterns including spots, filaments, and spot selfreplication phenomena (cf. [32]).
1.3
A Brief History of the Gray-Scott Model
In this thesis, we concentrate on one specific RD model, the Gray-Scott
model, which over the past ten years has been one of the most intensely
studied RD system. It was first introduced to model an irreversible chemical reaction u + 2v → 3v, v → p, by Gray and Scott in [35]. It qualitatively
models a chemical experiment that is set up in a thin transparent gel reactor, whose bottom surface is in contact with a well-stirred reservoir that is
continuously fed by all reagents.
In 1993, Pearson [77] discovered a large variety of spatio-temporal patterns by numerically computing solutions to the two-dimensional Gray-Scott
(GS) model. This numerical study stimulated much interest in exploring
new non-Turing type localized patterns in other RD systems. In [77] the
following GS model with periodic boundary conditions was computed in a
square of size 2.5 × 2.5:
Ut = DU ∆U − U V 2 + F (1 − U ) ,
2
Vt = DV ∆V + U V − (F + k)V .
(1.2a)
(1.2b)
4
1.3. A Brief History of the Gray-Scott Model
Here k is the dimensionless rate of the second reaction and F is the dimensionless feed rate. The diffusion coefficients are Dv = 2Du = 2.0 × 10−5 .
For this ratio of diffusion coefficients used in [77] there are no stable Turing
patterns. Clearly, this system has a trivial steady state at U = 1 and V = 0,
which is linearly stable for any F and k. Initially the system was placed at
this trivial state, then certain localized regions located symmetrically about
the center of the grid were perturbed to U = 1/2 and V = 1/4. These
initial conditions were further perturbed with ±1% random noise to break
the symmetry. The system was then integrated for 200, 000 time steps and
an image was saved.
In this way, the numerical study of [77] revealed a variety of new and
intricate spatial-temporal localized patterns in various regions of the twodimensional (F, k) parameter space, which had not been seen previously in
other RD systems. These patterns include stable spots, traveling spots, a
mixture of spots and stripes, growing labyrinths, chaotic dynamics, and a
continuous process of spot-birth through replication and spot-death through
over-crowding etc. The corresponding phase diagram in the parameter space
F vs. k for all patterns was plotted in [77]. Of all the new types of patterns
observed, the spot self-replication process was considered the most qualitatively interesting.
Later in 1994, an autocatalytic ferrocyanide-iodate-sulphite (FIS) reaction experiment (cf. [59]) was performed to exhibit spot self-replication in the
laboratory. In this experiment the control parameter was the concentration
of ferrocyanide input in the reservoir. The repeated growth, self-replication,
and annihilation, of spots was observed in this laboratory setting for a wide
range of experimental parameters. The chemical reaction kinetics in this experimental reaction, although much more involved, are qualitatively similar
to that for a modified Gray-Scott model of the form
Ut = DU ∆U − U V 2 + A(U0 − U ) ,
2
Vt = DV ∆V + U V + B(V0 − V ) .
(1.3a)
(1.3b)
Here U and V are the concentrations of the two chemical species, the
reagents in the reservoir are at fixed concentrations (U0 , V0 ) with U0 = V0 =
1, while A and B represent the strengths of the coupling between the two
chemical species.
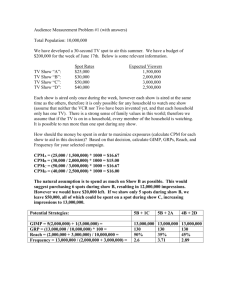
Fig. 1.1 shows the time evolution of spot patterns as copied from [59]
(with permission). The top row is from the laboratory experiment, with
blue (red) representing a state of high (low) pH level. The spot in the
middle on the frame t = 0 develops a peanut shape at t = 4, and eventually
5
1.4. Methodology
Figure 1.1: From [59] (with permission). The top row of figures are taken by
video camera for the FIS reaction, with the blue (red) area representing high
(low) pH levels. The bottom row are figures from the numerical simulation of
the Gray-Scott model (1.3) (with permission). Similar spot self-replication
processes are observed.
splits. The same phenomena is observed for the spot in the middle of the
last two frames. This behavior continues indefinitely, as long as the reactor
conditions are maintained. The bottom row of Fig. 1.1 is from the numerical
simulation of the dimensionless Gray-Scott model (1.3), with the parameters
A = 0.02, B = 0.079 and DU = 2DV = 2.0 × 10−5 . The spots correspond to
a region of high concentration V and low concentration U . It is obvious that
the self-replication behaviors in the experiment and numerical computation
are similar, which also suggests that replicating spots can also occur in other
RD systems.
In §1.5 we give a detailed summary of some more recent analytical and
numerical studies of localized pattern formation in the GS model in various
parameter regimes and from different mathematical viewpoints.
1.4
Methodology
Theoretical approaches for the analysis of spatial-temporal pattern formation have been developed over the past half century. Comprehensive surveys
and examples of weakly nonlinear theory for various physical and chemical
systems are given in [15], [14], [94], [66], and [95]. In this section, we describe
some general analytic approaches that are applicable to many RD systems.
6
1.4. Methodology
1.4.1
Turing Stability Analysis
For the finite domain problem, a Turing instability is determined by linearizing (1.1) around a spatially homogeneous steady state (AE , HE ), and
then examining the behavior of discrete spatial Fourier modes as a function
of a dimensionless bifurcation parameter (cf. [90]).
For (1.1) posed in the one-dimensional interval 0 < x < 1 with homogeneous Neumann boundary conditions at both endpoints, we perturb
the spatially homogeneous state (AE , HE ) by introducing in (1.1) a sinusoidal perturbation of the form A = AE + a cos(ωj x)eλt/τA and H =
HE + h cos(ωj x)eλt/τH , where ωj = π j. By linearizing the resulting system,
we obtain the eigenvalue problem
−ωj2 DA + K1
K2
a
a
.
=
λ
h
h
K3
−ωj2 DH + K4
Here K1 = FA (AE , HE ), K2 = FH (AE , HE ), K3 = GA (AE , HE ), and K4 =
GH (AE , HE ). Assume that the spatially homogeneous equilibrium state is
always stable, so that K1 + K4 < 0 and K1 K4 − K2 K3 > 0. In the presence
of diffusion, the spatially homogeneous equilibrium state is stable when the
following two conditions hold:
−ωj2 (DA + DH ) + K1 + K4 < 0 ,
(K1 − ωj2 DA )(K3 − ωj2 DH ) − K2 K3 > 0 .
When these conditions are not satisfied, the spatially homogeneous equilibrium state loses its stability to a spatially periodic Turing pattern of a
certain wavelength. This type of diffusion-driven instability is well-known
to occur when the ratio of inhibitor to activator diffusivity, i.e. DH /DA ,
is sufficiently large (cf. [90]). Many examples of this type of linear Turing
stability theory are given in [66].
There are several common classifications of RD systems. If A is an
activator it means that for some parameters the amplitudes of localized
structures of A will grow when H is fixed. Mathematically this requires that
∂A F < 0 for certain values of A and H (cf. [42] [44] [43]). Moreover, if H
is an inhibitor it means that H diffuses over a wide range to damp elevated
regions of the activator A. These conditions are expressed mathematically
in [42], [44], and [43], by ∂H G > 0 and ∂A G · ∂H F < 0 for all values of A
and H. Then, according to the sign of ∂A G, the RD system (1.1) is classified
into two categories: the activator-substrate
model with a Jacobian matrix
+ +
with sign structure
, and the activator-inhibitor model with a
− −
+ −
.
Jacobian matrix with sign structure
+ −
7
1.4. Methodology
It follows readily that the GS system (1.2) is an activator-substrate
model. The activator V increases the rate of a catalyzed reaction, while
the chemical U is the substance acted upon by a catalyst, which is referred
to as a substrate. The inhibitory effect results from the depletion of the
substrate required to produce the activator.
1.4.2
Weakly Nonlinear Theory
Perturbation Method
For nonlinear differential equations, finding an analytical solution is impossible in general. However, when some parameters take extreme values, the
original model can often be reduced to a simpler one for which the solution can be calculated analytically. In the 1960’s and early 1970’s, many
asymptotic and perturbation methods were developed and studied. The
importance of these methods is that they can often greatly reduce the intricate mathematical models into a form that is more amenable to analyze
(cf. [81]). Many formal asymptotic and perturbation methods are discussed
and illustrated in [45].
One method, called the method of multiple scales, applies to wave-type
problems where there are two time or space scales; a fast oscillation together
with a slow modulation of the envelope of the fast oscillation. Usually it is
difficult to represent all physical scales analytically, but this method allows
for an accurate solution over asymptotically long time or space intervals.
When the nonlinearities are weak and for the slow spatial and temporal
solution behavior generic to parameter values near instability thresholds, the
method of amplitude equations is often used to describe weakly nonlinear
effects for the envelope function associated with the basic state (cf. [82] [67]).
The derivation of these amplitude equations, which evolve over an asymptotically long time interval, is based on a formal multiple-scale method.
The analysis incorporates projections of the nonlinear terms on the discrete
unstable Fourier modes in a perturbative way. For many infinite domain
problems, the resulting amplitude equation characterizing a weakly nonlinear instability near a bifurcation point is the complex Ginzburg-Landau
model (CGL) partial differential equation
∂t A = µA − (1 + iα)|A|2 A + γ(1 + iβ)∂xx A .
(1.4)
√
Here i = −1, while α, β, µ, γ are real constants with numerical values
determined by the kinetics and diffusivities of each specific RD system. This
CGL model provides a general and simple framework to address various
8
1.4. Methodology
RD models in a unified manner, and thus it plays an important role in
analyzing weakly nonlinear instabilities. However, the CGL model is only
valid in a small region near instability thresholds of the base state, and
may provide qualitatively misleading information if it is applied to explain
pattern formation scenarios far from the instability threshold.
Formal Method of Bifurcation Theory
Another general method of analysis of RD systems uses qualitative bifurcation theory of differential equations to find general features of the solutions.
Starting in the late 1960s there was an increased focus on the development of
a bifurcation theory to describe the branching behavior of solutions to differential equations as a function of dimensionless parameters, and to determine
mathematical principles governing the exchange of stability of intersecting
solution branches. This approach is geometrical and topological, and can be
applied either at the level of fast oscillations, or to analyze the amplitude
equations that are difficult to solve.
An expansion scheme known as normal form theory (cf. [33]) is often
considered to preserve the essential features of the original model and it
represents a universal description of dynamics near bifurcation points. This
theoretical framework is very useful in complicated situations with degenerate or symmetric bifurcations, but it is usually restricted to ideal, spatially
periodic solutions.
A related approach is to derive a reduced dynamical description near a
bifurcation point by projecting the dynamics onto a lower dimensional space
(the center manifold). For finite domain problems, center manifold theory
(cf. [9]) allows for the rigorous analysis of ODE amplitude equations.
1.4.3
Techniques for Localized Spike and Spot Patterns
In contrast to the extensive development and successful use of weakly nonlinear theory to characterize small-amplitude pattern formation near bifurcation points in the 1970’s and 1980’s, there are few general theoretical results
addressing the dynamics and stability of spatially localized patterns for RD
models, such as those described in §1.2. The role of analytical theories to
explain the dynamics and stability of localized patterns, including localized
spikes and spots, stripes, spiral waves and interfacial patterns etc., for which
the singular perturbation method is essential, has gained increasing interest
since the mid-1980s.
With regards to the rich collection of localized patterns computed for
9
1.5. Literature Review: Localized Spot Patterns for Reaction-Diffusion Systems
the GS model by him in [77], Pearson comments: ”Most work in this field
has focused on pattern formation from a spatially uniform state that is near
the transition from linear stability to linear instability. With this restriction, standard bifurcation-theoretic tools such as amplitude equations have
been used with considerable success. It is unclear whether the patterns presented here will yield to these standard technologies.” Further emphasizing
this point, Knobloch in his survey [47] remarks that ”The question of the
stability of finite amplitude structures, be they periodic or localized, and their
bifurcation properties is a major topic that requires new insights.”
In particular, to characterize localized spike and spot patterns the method
of matched asymptotic expansions must be used to incorporate the two distinct spatial scales, and to resolve localized regions or boundary layers where
solution behavior changes rapidly. Similar singular perturbation techniques
often allow for the reduction of an RD system to a finite-dimensional dynamical system for certain collective coordinates that evolve slowly in time. The
evolution of these coordinates often characterize the dynamics of certain features of quasi-equilibrium localized patterns, such as slowly drifting spots.
In order to analyze the stability of spatially localized quasi-equilibrium solutions, one typically must analyze the spectrum of certain singularly perturbed eigenvalue problems. These eigenvalue problems, with two distinct
spatial scales, are often very challenging to investigate analytically. In certain limiting cases, a class of nonlocal eigenvalue problems determines the
threshold for the instability of localized patterns. This general theoretical
framework is the one used in this thesis to investigate some specific aspects
of localized pattern formation in the GS model.
1.5
Literature Review: Localized Spot Patterns
for Reaction-Diffusion Systems
The experimental and numerical evidence highlighted above for the occurrence of spot patterns and various spatio-temporal structures have, over
the past decade, been the motivation for many theoretical investigations
concerning the existence, stability, and dynamics of localized patterns in
reaction-diffusion systems.
For the study of localized pattern formation, there are two main asymptotic regimes of the diffusion coefficients in (1.1) that can be distinguished:
the weak interaction regime with DA ≪ 1, DA /DH = O(1) where the original numerical simulation of the Gray-Scott model (cf. [77]) was performed,
and the semi-strong interaction regime DA /DH ≪ 1, where many analytical
10
1.5. Literature Review: Localized Spot Patterns for Reaction-Diffusion Systems
studies, such as those described below, have been focused.
In the semi-strong interaction regime, a prototypical reaction-diffusion
system of activator-substrate type is the Gray-Scott (GS) model (1.2) where
the chemical u is a fast-diffusing substrate, and is consumed by a slowlydiffusing activator v. This mechanism drives sharply localized spatial spikes
(or spots) of activator coupled with nearby shallow dips of substrate. In
contrast, the Gierer-Meinhardt (GM) model was suggested in [31] as a typical activator-inhibitor reaction-diffusion system. For this model the reaction
terms in (1.1) have the form
F (A, H) = −A+
Ap
,
Hq
G(A, H) = −H +
Ar
,
Hs
1<
qr
, 1 < p.
(p − 1)(s + 1)
In the semi-strong interaction regime, the time-dependent solutions to the
GM model are characterized by sharply localized spatial spikes (or spots) of
activator coupled with nearby shallow peaks of inhibitor. The inhibitor has
a long range interaction and mediates the creation of additional spikes (or
spots) of activator concentration.
Over the past decade there have been many theoretical studies relating
to the existence, stability, and dynamics, of localized structures for (1.1)
in the semi-strong interaction regime, for various choices of the kinetics.
Most of these previous studies have been focused on pattern formation in
a one-dimensional domain. In contrast, owing to the significantly increased
mathematical complexity of higher dimensional analysis, there have been
relatively few analytical studies of localized pattern formation in more realistic two-dimensional domains. In §1.3.1 we give a literature survey of
some analytical studies of spike-type pattern formation in one-dimensional
domains, while in §1.3.2 we highlight some analytical work for spot-type
pattern formation in two-dimensional domains.
1.5.1
Analysis in a One-Dimensional Domain
Since early 1990s, there have been many analytical studies for spike patterns
of the Gray-Scott (GS) model (1.2). A convenient alternative dimensionless
√
form of the GS model was put forth in [64], by introducing v = V / F ,
x = −1 + 2X/L and t = (F + k)T , where L is the length of the spatial
interval, i.e. X ∈ [0, L]. Then, on |x| < 1, (1.2) becomes
vt = ε2 vxx − v + Auv 2 ,
vx (±1, t) = 0 ,
2
τ ut = D uxx + (1 − u) − uv ,
ux (±1, t) = 0 ,
(1.5a)
(1.5b)
11
1.5. Literature Review: Localized Spot Patterns for Reaction-Diffusion Systems
where the positive parameters A, τ , D, and 0 < ε ≪ 1, are defined in terms
of the positive parameters F , k, DU , DV , L of (1.2) as
√
F +k
4DV
F
4DU
2
, τ≡
, A≡
.
, ε ≡ 2
D≡
2
FL
L (F + k)
k
F +k
The new system (1.5) is particularly convenient in that it shows that the
asymptotic construction of equilibrium solutions in the semi-strong limit
ε → 0 with D = O(1) depends only on the so-called feed-rate parameter A
and the diffusion coefficient D. Alternatively, the reaction-time constant τ
only influences the stability of the solutions. The effect of the finite domain
and the strength of inter-spike interactions is mediated by the diffusivity D.
The problem (1.5) for a one-spike solution with D ≪ 1 and the spike interior
to (−1, 1) is essentially equivalent to the problem for a one-spike solution on
the infinite line x ∈ (−∞, ∞). For k−spike patterns, the effect √
of the finite
domain √
and inter-spike interactions are significant only when k D = O(1).
When k D ≪ 1, an equilibrium k−spike solution is closely approximated
by a solution consisting of k identical copies of a one-spike equilibrium for
the infinite line problem.
In the weak interaction regime where D/ε2 = O(1), Nishiura et. al [72]
have studied self-replicating patterns in (1.2) for the specific diffusivity values DU = 2 × 10−5 and DV = 10−5 . Starting from a localized initial pattern
of one spike, self-replication was viewed as a complicated transient process
leading to a stable stationary or oscillating Turing pattern. The mechanism
underlying spike self-replication suggested in [72] was based on a hierarchical saddle-node bifurcation structure for the global bifurcation branches of
multi-spike solutions to (1.2). The saddle-node bifurcation values for multispike solution branches were found to nearly coincide. When the parameters
in the GS model were chosen to be near this saddle-node bifurcation value, a
single initial spike was found to undergo a self-replication process, whereby
the two spikes at the extremities of the spike pattern underwent repeated
replication. This edge-splitting self-replication process terminated with a
stable spatially periodic Turing pattern. Some necessary conditions for the
occurrence of self-replicating spike patterns were formulated in [72]. See [72]
for further details.
The related investigations of [68] and [73] for the GS model in the
weak interaction regime gave a qualitative explanation for the occurrence
of spatio-temporal chaos of spikes based on the inter-relationship of global
bifurcation branches of ordered patterns with respect to supply (feed-rate
parameter F ) and removal rates (reaction time constant k). As a result,
12
1.5. Literature Review: Localized Spot Patterns for Reaction-Diffusion Systems
the chaotic dynamics in the GS model were suggested to be driven by at
least two mechanisms. One is the heteroclinic cycle built up by three different processes; long wave instability (the unstable homogeneous state to
background state (1, 0) with small perturbation), self-replication, and selfdestruction (from stationary spike patterns to the homogeneous state). The
other possible mechanism was the combination of replication and annihilation (two spikes collide and generate a new one).
In the semi-strong interaction regime D ≫ O(ε2 ), the substrate u in
the GS model varies globally over the domain. In contrast, the activator
v is localized and consists of a a sequence of spikes, each of which is localized within a narrow layer of order O(ε) around some point interior to
the interval. In this semi-strong regime, there are many results from formal asymptotic analysis for spike solutions for the GS model, including,
the construction of single spike solutions and pulse-splitting instability [78]
[19] [55], the slow dynamics of traveling spikes [22] [16] [17] [64] [86] [53],
and the oscillatory instability of the spike amplitudes [54], etc. We now
describe some of this work in terms of the different parameter regimes for
the dimensionless system (1.5).
In terms of feed-rate parameter A, three distinct regimes for the GS
model (1.5) in a one-dimensional domain, each with very different solution
behavior, have been identified in [63]. They are the high feed-rate regime
A = O(1) (also called the pulse-splitting regime), the low feed-rate regime
A = O(ε1/2 ), and the intermediate regime O(ε1/2 ) ≪ A ≪ 1, which separates the former two regimes in A.
In the high feed-rate regime A = O(1), the central phenomena is pulsesplitting, as shown in Fig. 1.2(a). Referring to Fig. 1.2(a), there is initially
one spike as depicted by the blue curve, whose peak gradually deforms and
splits into two spikes as shown by the green curve. The resulting spikes
then slowly drift towards their equilibrium location (shown at some later
instant by the red curve) as time evolves. Another possible instability that
can occur in the high feed-rate regime is the oscillatory drift instability.
This instability relates to the oscillatory motion of spot locations, as seen
in Fig. 1.2(b), where the blue spike keeps its basic shape, but oscillates
repeatedly about its equilibrium location at x = 0. The realization of either
type of instability in a numerical simulation depends on the actual parameter
values of A = O(1), D, and τ .
In the high feed-rate regime, the asymptotic study of [55] constructed a
certain core problem for k-spike equilibria in a finite domain. The far-field
conditions for this core problem were derived from the asymptotic matching
of outer and inner expansions for the global variable u. An alternative
13
1.5. Literature Review: Localized Spot Patterns for Reaction-Diffusion Systems
1.4
1
1.2
0.9
←
→
0.8
1
0.7
0.8
0.6
0.5
0.6
0.4
0.4
0.3
0.2
0.2
0.1
0
−1
−0.5
0
0.5
1
0
−1
−0.8
−0.6
(a) Splitting
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
0.6
0.8
1
(b) Drift
1.6
1.4
1.4
1.2
↑
1.2
1
1
↓
0.8
0.8
0.6
0.6
0.4
0.4
0.2
0.2
0
−1
−0.5
0
(c) Competition
0.5
1
0
−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
(d) Profile
Figure 1.2: An illustration of different instabilities of spike solutions v vs.
x. As time evolves, each spike pattern is plotted first by the blue curve,
then the green curve and finally the red curve. (a) Splitting instability: one
initial spike (in blue) splits into two and the resulting two spikes slowly
drift toward their equilibrium locations; (b) Oscillatory drift instability: the
location of the spike oscillates about the equilibrium location at x = 0; (c)
Competition instability: the amplitude of the center spike decays as a result
of the overcrowding effect; (d) Oscillatory profile instability: the amplitude
of a spike oscillates repeatedly.
14
1.5. Literature Review: Localized Spot Patterns for Reaction-Diffusion Systems
analysis, based on geometric singular perturbation theory, was given in [19].
It is shown in [55] that there are√no k-spike equilibria to (1.5) when A >
Apk with Apk = 1.347 coth(1/(k D)), and that a pulse-splitting process
will be initiated in an O(1) time when A > Apk . A conjecture based on
these critical values Apk was used in [55] to predict the the final number
of equilibrium spikes. In addition, in [55] the stability of k-spike equilibria
with respect to the small eigenvalues of O(ε) associated with the oscillatory
drift instability was studied. The instability leads to the oscillation of spike
locations as shown in Fig. 1.2(b). The scaling law for the Hopf bifurcation
value associated with the oscillatory drift instability was found to be τT W =
O(ε−1 A−2 ), with the exact value for τT W depending on A, D, ε, k.
In the low feed-rate regime A = O(ε1/2 ), there are two possible mechanisms for instabilities of spike patterns. One is the competition instability,
whereby the interaction between spikes may annihilate some of them due to
an overcrowding effect. One example of this is given in Fig. 1.2(c), where
for an initial pattern of three spikes (in blue), the center spike gradually
decays (in green), and eventually is annihilated (in red). Alternatively, the
amplitude of a spike may oscillate repeatedly, which is referred to as an
oscillatory profile instability. This instability is depicted in Fig. 1.2(d). For
equilibrium spike solutions, these instabilities were analyzed in [54].
In the low feed-rate regime, with new parameter A = ε−1/2 A = O(1)
and variable ν = ε1/2 v, we reformulate the GS model (1.5) on |x| < 1 as
νt = ε2 νxx − v + Auν 2 ,
vx (±1, t) = 0 ,
τ ut = Duxx + (1 − u) − ε−1 uν 2 ,
ux (±1, t) = 0 .
(1.6a)
(1.6b)
It was shown in [54] (see also [22]), that there exists a saddle-node bifurcation structure of k-spike equilibria. In addition, a nonlocal eigenvalue
problem (NLEP) for the large eigenvalues with λ = O(1) was analyzed in
[54], which showed that these large eigenvalues can enter the unstable right
half-plane either along the real axis or through a Hopf bifurcation leading,
respectively, to either a competition instability (also called an overcrowding
or annihilation instability) as shown in Fig. 1.2(c)), or to an oscillatory profile instability respectively (as shown in Fig. 1.2(d)). The type of instability
obtained depends on the values of A, τ , and D. Other related work for a
one-spike solution for the infinite line problem in the low feed-rate regime
was given in [63]. An alternative analysis, based on geometric singular perturbation theory, for a periodic spike pattern on the infinite line was given
in [93].
In [86], the dynamics and instabilities of quasi-equilibrium two-spike solutions were studied in the low feed-rate regime on a finite domain. The
15
1.5. Literature Review: Localized Spot Patterns for Reaction-Diffusion Systems
spikes were found to slowly drift towards there equilibrium locations on a
finite interval with speed O(ε2 ). It was also shown the parameter thresholds
for competition and oscillatory profile instabilities for the two-spike pattern
depend on the parameters A, D, and τ , as well as the instantaneous locations of the two spikes. This dependence of the stability thresholds on the
spike locations suggests that, for a two-spike pattern that is initially stable,
the pattern can be de-stabilized at some later time if, as a result of the spike
motion, the stability boundary is crossed before the spikes reach their equilibrium locations. Such an intrinsic dynamically triggered instability was
studied in [86]. The companion study [53] analyzed the stability problem
of k-spike equilibria with respect to the small eigenvalues λ = O(ε2 ), which
are associated with slow oscillatory drift instabilities of the equilibrium spike
locations. An oscillatory drift instability refers to an oscillatory behavior of
the location of a spike around its equilibrium value on a finite domain.
In the intermediate regime, O(1) ≪ A ≪ O(ε−1/2 ), it was shown in
[54] that no competition instabilities can occur for a k-spike equilibrium
solution when the spikes are separated by O(1) distances. In addition, a
single universal NLEP problem independent of D and k was derived to
provide a scaling law for the stability of a symmetric k-spike equilibrium
solution with respect to oscillatory profile instabilities. The critical value of
τ where such profile instabilities occur has the scaling law τH = O(A4 ) ≫ 1.
In contrast, in [53] it was shown that the Hopf bifurcation value associated
with the small eigenvalues λ = O(ε2 ), governing oscillatory drift instabilities,
has the scaling law τT W = O(ε−2 A−2 ). By comparing these two scaling laws,
we conclude that there are the following two subregimes in the intermediate
regime for A where different solution behavior occur:
O(1) ≪ A ≪ O(ε−1/3 ),
τH ≪ τT W ,
O(ε−1/3 ) ≪ A ≪ O(ε−1/2 ),
profile instability dominates;
τT W ≪ τH ,
drift instability dominates.
In the first subregime, an oscillatory profile instability occurs before the
onset of an oscillatory drift instability as τ is increased. In contrast, the
drift instability dominates in the second subregime as τ is increased. For
the infinite-line problem, this result was also observed in [65]. In this thesis,
our contribution to the study of spike solutions for the one-dimensional
problem focuses on analyzing these two distinct oscillatory instabilities in
the intermediate regime for the evolution of multi-spike patterns on a finite
interval.
In a more general context, there have been many formal asymptotic
studies of spike motion for other two-component reaction-diffusion singularly
16
1.5. Literature Review: Localized Spot Patterns for Reaction-Diffusion Systems
perturbed reaction-diffusion systems including, k−spike dynamics for an
elliptic-parabolic limit of the Gierer-Meinhardt (GM) model (cf. [39]), twospike dynamics for a class of problems including a regularized GM model
on the infinite line (cf. [20]), and two-spike dynamics for the GM and GS
models (cf. [86]).
In addition to the largely formal asymptotic studies outlined above,
there are only a few rigorous theories for spike solutions to two-component
reaction-diffusion systems. The existence and stability of single-spike and
multi-spike stationary state on the infinite line was studied in [22] and [18].
Recently, in [21] a renormalization method was used to rigorously analyze
two-spike dynamics for a regularized GM model on the infinite line.
1.5.2
Analysis in a Two-Dimensional Domain
For a two-dimensional spatial domain, there are only a few analytical results
characterizing spot dynamics of reaction-diffusion systems, such as [13], [52]
and [88] for a one-spot solution of the GM model, and [26] [27] and [28] for
exponentially weakly interacting spots in various contexts.
With regards to the stability of equilibrium multi-spot patterns for singularly perturbed two-component reaction diffusion systems, an analytical
theory based on the rigorous derivation and analysis of certain nonlocal
eigenvalue problems (NLEP) has been developed in [103] [102] [99] [101]
[100] for the GM and GS models.
In [99], the existence and stability of a one-spot solution was analyzed
in the infinite domain Ω = R2 for the following GS model:
vt = ε2 ∆v − v + Auv 2 ,
2
τ ut = D ∆u + (1 − u) − uv ,
x ∈ Ω,
∂n u = ∂n v = 0,
(1.7a)
x ∈ ∂Ω. (1.7b)
In [101] the one-spot analysis was extended to treat the case of a k−spot patterns on a bounded domain. In [101] it was shown that there is a saddle-node
bifurcation for equilibrium solution branches, similar to that for multi-spike
patterns for the GS model in one space dimension. This saddle-node bifurcation was found to occur in the low feed-rate regime, characterized by the
scaling A = O(ε(− ln ε)1/2 ). In this regime for A, in [101] a leading order
asymptotic theory in powers of ν ≡ −1/ ln ε was developed to characterize
the stability of a k-spot pattern for a fixed τ independent of ε. This leading order theory predicts that the stability threshold for the spot pattern is
independent of the spot locations and that there are no oscillatory instabilities in the spot amplitudes for fixed τ independent of ε. Rigorous results of
17
1.5. Literature Review: Localized Spot Patterns for Reaction-Diffusion Systems
the existence and stability of asymmetric multiple spot patterns for the GS
model in R2 were given in [100]. Finally, a survey of this theory, together
with a further application of it to the Schnakenburg model, is described in
[104].
However, these previous theoretical results based on the leading order
theory in powers of ν have been found not to agree rather closely with stability thresholds computed from full numerical simulations of the GS model.
This discrepancy between the previous theoretical results and full numerical
results occurs since ν = −1/ ln ε is not very small unless ε is extremely small,
for which numerical computations are extremely stiff. Therefore, a stability
theory for multiple spot solutions that accounts for all terms in powers of
ν is required. In addition, since the scaling regime A = O(ε(− ln ε)) where
a spot-replication instability can occur (cf. [63]) is logarithmically close to
the low feed-rate regime A = O(ε(− ln ε)1/2 ) where competition instabilities can occur, it is highly desirable to develop an asymptotic theory that
incorporates these two slightly different scaling regimes into a single parameter regime where both types of instabilities be studied simultaneously. The
leading order theory in [101] is not sufficiently accurate to treat both types
of instabilities in a single parameter regime.
To our knowledge, the first attempt to asymptotically analyze the mechanism of self-replicating spot patterns in a two-dimensional domain is [56] for
the Schnakenburg model. In the semi-strong diffusion limit of this model, a
differential algebraic (DAE) system of ODE’s was derived to describe the dynamical behavior of multi-spot patterns. This asymptotic analysis is based
on constructing a quasi-equilibrium solution that has the effect, in the outer
region, of representing the spots as logarithmic singularities of certain unknown source strengths at unknown spot locations. Asymptotic matching,
based on summing all of the logarithmic terms in the asymptotic expansion, is then used to derive a DAE system for the spot locations and source
strengths. Related methods to account for all logarithmic terms in singularly
perturbed elliptic problems have been formulated previously for eigenvalue
problems in [96] and for other related problems in [85].
With regards to spot self-replication, in [56] the numerical computation
of an eigenvalue problem, which was derived by matched asymptotic analysis, was performed to determine the source strength value for the onset of a
spot-replication event. This critical value of the source strength was found
to depend on the the parameters in the Schnakenburg model, together with
the domain geometry and the spot locations through a certain Neumann
Green’s function.
18
1.6. Objectives And Outline
1.6
Objectives And Outline
The overall general objective of this thesis is to characterize quantitatively
the dynamics and instability mechanisms of spatio-temporal localized patterns for the GS model in various parameter regimes. The main analytical
method that we use here is a formal matched asymptotic analysis, which
is a very powerful tool for problems involving disparate spatial scales, such
as those for localized patterns in reaction-diffusion systems. This method
provides a way to reduce intricate mathematical models into a form more
amenable to analysis. The central role of this asymptotic method in applied
mathematics was emphasized by Segel in [81], and in his later paper [84] on
quasi-steady state analysis.
More specifically, this thesis consists of certain analytical and numerical
results for the GS model in one-dimensional and two-dimensional domains.
For a one-dimensional domain, we study the open problem of analyzing
the two distinct types of oscillatory instabilities discussed previously together with the dynamics of multi-spike patterns in the intermediate feedrate regime O(1) ≪ A ≪ O(ε−1/2 ) for the semi-strong interaction limit
D = O(1) with ε → 0. In a two-dimensional domain, we analyze the dynamics, self-replication behavior, and competition and oscillatory profile instabilities of spot patterns in the semi-strong interaction regime D = O(1)
and ε → 0 for the GS model. Phase diagrams in parameter space highlighting where these diverse instabilities can occur are constructed through
a combination of analytical and numerical methods from the spectrum of
certain eigenvalue problems. The objectives and structure of the thesis are
given below in greater detail.
1.6.1
Thesis Outline: the GS Model in a 1-D Domain
In Chapter §2 we analyze the dynamics and oscillatory instabilities of multispike solutions to the GS model (1.6) in the intermediate regime O(1) ≪
A ≪ O(ε−1/2 ) of the feed-rate parameter A. The novelty and significance
of this intermediate parameter regime is that, in terms of the reaction-time
parameter τ , there are two distinct subregimes in A where qualitatively
different types of spike dynamics and instabilities occur. These instabilities
are either a breathing instability in the spike amplitude, or a breathing
instability in the spike location. In addition, in the intermediate parameter
regime a formal singular perturbation analysis, as summarized in Principal
Result 2.1, reveals that an ODE-PDE coupled Stefan-type problem with
moving Dirac source terms determines the time-dependent locations of the
19
1.6. Objectives And Outline
spike trajectories. The derivation and study of this Stefan problem is a new
result for spike dynamics in the GS model. Finally, in contrast to previous
studies, our study is not limited to the special case of two-spike dynamics.
In our analysis we can readily treat an arbitrary number of spikes for (1.6)
in the regime O(1) ≪ A ≪ O(ε−1/2 ).
1.6
1.00
1.4
0.75
1.2
0.50
1.0
0.25 ×
0.8
xj
v, u
×
0.00
0.6
−0.25 × ×
0.4
−0.50
0.2
−0.75
0.0
−1.00 −0.75 −0.50 −0.25
0.00
0.25
0.50
x
(a) v and u vs. x
0.75
1.00
× × × × × × × × × × × × × ××
−1.00
0
× × ×
× × × × × × × × × × ××
5
10
15
20
σ
(b) xj vs. σ
Figure 1.3: Slow dynamics, for ε = 0.01, A = 8, and D = 0.2, of a two-spike
quasi-equilibrium solution with x1 (0) = −0.2 and x2 (0) = 0.3. Left figure:
plot of v (solid curves) and u (dotted curves) vs. x at σ = 0, σ = 2.5,
and σ = 30. Right figure: plot of xj vs. σ = ε2 A2 t. As σ increases, the
spikes drift to their steady state limits at x = ±1/2. The solid curves are the
asymptotic results and the crosses indicate full numerical results computed
from (1.6) using the software of [8].
In the subregime O(1) ≪ A ≪ O(ε−1/3 ) with τ ≪ O(ε−2 A−2 ), the Stefan problem is quasi-steady and we derive an explicit differential-algebraic
(DAE) system for the spike trajectories. The result is given in Principal
Result 2.2. For the case of a two-spike evolution, in Fig. 1.3 we illustrate
our result by plotting the quasi-equilibrium solution for u and v together
with the spike trajectories for a particular set of the parameter values. In
this figure the asymptotic DAE system results for the spike trajectories are
shown to compare very favorably with full numerical results computed from
(1.6) using the method of [8]. In this subregime, where the speed of the
spikes is O(ε2 A2 ) ≪ 1, we show from the analysis of a nonlocal eigenvalue
problem (NLEP) that the instantaneous quasi-equilibrium spike solution
first loses its stability to a Hopf bifurcation in the spike amplitudes when
τ = τH = O(A4 ). This bifurcation leads to oscillations on an O(1) time scale
in the amplitudes of the spikes. Our stability results are given in Principal
20
1.6. Objectives And Outline
Results 2.3 and 2.4. These NLEP stability results are the first such results
for multi-spike quasi-equilibrium patterns for the GS model on a finite domain with an arbitrary number of spikes. An important remark is that our
NLEP stability analysis in the intermediate regime for a multi-spike pattern with O(1) inter-spike distances can be reduced to the study of a single
NLEP. This feature, which greatly simplifies the stability analysis, is in distinct contrast to the stability analysis of [86] and [54] for the GS model in the
low feed-rate regime A = O(1), and for the corresponding Gierer-Meinhardt
model (see [39], [21], [97]), where k distinct NLEP’s govern the stability of
k-spike patterns.
Next, we study spike dynamics in the subregime O(ε−1/3 ) ≪ A ≪
O(ε−1/2 ) with τ = τ0 ε−2 A−2 , for some O(1) bifurcation parameter τ0 . In
this regime, the time-dependent spike locations are determined from the
full numerical solution of a Stefan-type problem with moving Dirac source
terms concentrated at the unknown spike locations. Similar moving boundary problems arise in the study of the immersed boundary method (see
[6] and [89]). The numerical method that we use for our Stefan problem
relies on the approach of [89] involving a high-order spatial discretization
of singular Dirac source terms. Such high spatial accuracy is needed in
our problem in order to accurately calculate the average flux for u at each
source point, which determines the speed of each spike. An explicit time
integration scheme is then used to advance the spike trajectories each time
step. With this numerical approach we compute large-scale time-dependent
oscillatory motion in the spike locations when the reaction-time parameter
τ0 exceeds some critical bifurcation value. Although the overall scheme has
a high spatial order of accuracy, the explicit time integration step renders
our numerical scheme not particularly suitable for studying large-scale drift
instabilities over very long time intervals.
By linearizing the Stefan problem around an equilibrium spike solution,
we analytically calculate a critical value of τ0 at which the equilibrium solution becomes unstable to small-scale oscillations in the equilibrium spike
location. This bifurcation value of τ0 , given in Proposition 2.5 below, sets
the threshold value for an oscillatory drift instability. The result for τ0 ,
based on a linearization of the Stefan problem, agrees with the result derived in [53] using the singular limit eigenvalue problem (SLEP) method of
[69].
The SLEP method has been extensively used to study similar oscillatory
drift instabilities that lead to the destabilization of equilibrium transition
layer solutions for Fitzhugh-Nagumo type systems (cf. [70], [38]). With this
method, Hopf bifurcation values for the onset of the instability can be cal21
1.6. Objectives And Outline
culated and the dominant translation instability, either zigzag or breather,
can be identified (cf. [70]). For spatially extended systems on the infinite
line, it is then often possible to perform a center manifold reduction, valid
near the Hopf bifurcation point, to develop a weakly nonlinear normal form
theory for large-scale oscillatory drift instabilities (see [25], [24] and the references therein). In contrast to this normal form theory, we emphasize that
our Stefan problem with moving sources provides a description of large-scale
oscillatory drift instabilities for values of τ0 not necessarily close to the Hopf
bifurcation point.
Similar Stefan problems with moving Dirac source terms have appeared
in a few other contexts. In particular, such a problem determines a flamefront interface in the thin reaction zone limit of a certain PDE model of
solid fuel combustion on the infinite line (cf. [76]). By using the heat kernel, this Stefan problem was reformulated in [76] into a nonlinear integrodifferential equation for the moving flame-front interface. By solving this
integro-differential equation numerically, a periodic doubling cascade and
highly irregular relaxation oscillations of the flame-front interface were computed in [76]. For a related Stefan problem arising from solid combustion
theory, a three-term Galerkin type-truncation was used in [29] to qualitatively approximate the Stefan problem by a more tractable finite dimensional dynamical system, which can then be readily analyzed. Finally, we
remark that in [46] a time-dependent moving source with prescribed speed
was shown to prevent blowup behavior for a certain class of nonlinear heat
equation.
An outline of Chapter §2 is as follows. In §2.1 we derive the Stefan
problem governing spike dynamics in the intermediate regime O(1) ≪ A ≪
O(ε−1/2 ). In §2.1.1 we analyze the quasi-steady limit of this problem. In §2.2
we analyze the stability of the quasi-equilibrium spike patterns of §2.1.1 in
the subregime O(1) ≪ A ≪ O(ε−1/3 ). In §2.3 we compute numerical solutions to the Stefan problem showing large-scale oscillatory drift instabilities
in the subregime O(ε−1/3 ) ≪ A ≪ O(ε−1/2 ). In addition, a critical value
of τ0 for the onset of this instability is determined analytically. Concluding
remarks are made in §2.4.
1.6.2
Thesis Outline: the GS Model in a 2-D Domain
In Chapter §3 we construct quasi-equilibrium spot patterns to the GS model
in a two-dimensional domain. In addition, we derive a DAE system for the
evolution of a k-spot pattern and we study self-replicating instabilities for
this pattern.
22
1.6. Objectives And Outline
In §3.1, the method of matched asymptotic expansions is used to construct a k−spot quasi-equilibrium solution to the GS model in an arbitrary bounded 2-D spatial domain. Let the j th spot be centered at xj for
j = 1, · · · , k. The local solution in the vicinity of each spot is, to leading
order, radially symmetric. Upon introducing a new local spatial variable,
and by rescaling u and v, we derive the following radially symmetric core
problem that holds in the inner, or local, region near the j th spot:
∆ρ Vj − Vj + Uj Vj2 = 0,
Vj → 0,
∆ρ Uj − Uj Vj2 = 0,
Uj → Sj ln ρ + χ(Sj ) + O(ρ−1 ) ,
0 < ρ < ∞,
as ρ → ∞ .
(1.8a)
(1.8b)
Here Uj , Vj are inner variables corresponding to u, v, and ∆ρ is the radially symmetric part of the Laplacian. In (1.8), the local solution Uj has
a logarithmic growth in the far-field, where the unknown source strength
Sj > 0 is introduced to measure the logarithmic growth of the j th spot.
This far-field logarithmic behavior for Uj must asymptotically match with
a logarithmic singularity of the Green’s function for the reduced-wave equation in the 2-D spatial domain. Recall that this Green’s function in 2-D can
1
ln |x − xj | + Rjj , where Rjj is the regbe decomposed as G(x; xj ) ∼ − 2π
ular, or self-interaction, part of G. The core problem, without the explicit
far-field condition in (1.8b), was first identified in [64] in the context of the
GS model in R2 , and later in the study [56] of the Schnakenburg model.
The boundary value problem (1.8) is then solved by using the collocation
software COLSYS (cf. [2]), for a range of values of the source strength Sj .
In the outer region, the nonlinear terms in (1.7b) can be represented as
the sum of singular Dirac source terms, which results from the localization
of the activator v near each xj . Therefore, in the quasi-steady limit, the
outer variable u can be explicitly expressed in terms of the Green’s function
of the reduced-wave equation. By asymptotically matching the inner and
outer solutions for u, a system of algebraic equations for the source strengths
Sj for j = 1, · · · , k is obtained. This system depends on the parameters A,
D, and ε together with the spot locations and domain geometry through the
Green’s function. Analytically, we show that this nonlinear algebraic system
has a saddle node bifurcation in terms of the parameter A. After calculating
the source strengths, the quasi-equilibrium solution can then be explicitly
represented in terms of A, D, ε and the core solution Uj , Vj , Sj , j = 1, · · · , k
valid near each spot.
In §3.3 we asymptotically match higher order terms in the asymptotic
expansion of the inner and outer solutions to derive an ODE system governing the dynamics of a collection of spots. This ODE system is coupled
23
1.6. Objectives And Outline
to the nonlinear algebraic system for the source strengths. The resulting
DAE system for the spot locations shows that the speed of each spot is
slow on the order O(ε2 ), and that the motion of each spot is proportional
to a linear combination of the gradients of a certain Green’s function at
the other spot locations. This DAE system is asymptotically valid for any
quasi-equilibrium spot pattern for parameter values away from the instability thresholds for spot-splitting, spot-oscillation, and spot-annihilation.
In §3.2 we study the stability of the core solution near the j th spot to a
local perturbation with angular dependence eimθ , where m is a non-negative
integer. Assuming that τ λ ≪ O(ε−2 ), we then derive a radially symmetric
eigenvalue problem in which m ≥ 0 appears as a parameter. The angular
mode m = 1 corresponds to translation, which trivially has a zero eigenvalue
with multiplicity two for any source strength Sj . In contrast, spot-splitting
instabilities are associated with modes m ≥ 2, whereas instabilities in the
spot amplitudes correspond to m = 0. In §3, we only consider the eigenvalue
problem with m ≥ 2, which corresponds to spot self-replication behavior.
For this mode, the local eigenvalue problems near each spot are coupled
together only through the nonlinear algebraic system that determine the
source strengths Sj for j = 1, . . . , k.
For a given source strength Sj the solution to the core problem (1.8) for
the inner variables Uj and Vj is computed. We then compute the spectrum
of the local eigenvalue problem near the j th spot in terms of the parameters m ≥ 0 and Sj . The quasi-equilibrium solution is unstable to spotreplication with mode m when the principal eigenvalue λ0 of this problem
satisfies Re(λ0 ) > 0. From a numerical computation of the spectrum of this
eigenvalue problem, obtained by using the linear algebra package LAPACK
(cf. [1]), we determine the splitting threshold by seeking the critical value
Σm of the source strength Sj for mode m for which the real part of the first
eigenvalue λ0 enters the positive half-plane (i.e. Re(λ0 ) = 0). We compute
that Σ2 < Σ3 < Σ4 , where Σ2 ≈ 4.31. Therefore, we predict that when Sj
satisfies Σ2 < Sj < Σ3 , a peanut-splitting instability with mode m = 2 for
the j th spot is initiated through a linear instability. This initial instability
is found numerically to be the precursor to a nonlinear spot self-replication
event. This self-replication
occurs in the high feed-rate regime,
instability
√ characterized by A = O −ε ln ε/ D .
In §3.4 we determine the direction of spot-splitting relative to the direction of spot motion. In §3.5 we analyze the motion and spot self-replication
instability for a two-spot pattern in R2 . In order to obtain an explicit
analytical theory for certain bounded domains, in §3.6 we give analytical
24
1.6. Objectives And Outline
expressions for the required Green’s function for the unit circle and for a
rectangular domain, which is valid for the two relevant asymptotic limits D = O(1) and D ≫ 1. For these specific domains where the Green’s
function is readily available, we illustrate our asymptotic theory by taking
different initial spot patterns, and we compare the asymptotic results for the
spot trajectories with corresponding full numerical results computed from
(1.7). For instance in Fig. 1.6.2, we show numerical solutions to (1.7) in a
square domain [0, 1] × [0, 1] for the parameter values A = 2.35, D = 1, and
ε = 0.02, starting from an initial 4-spot pattern with spots equally spaced
on a ring of radius 0.2 centered at (0.6, 0.6). The initial coordinates of the
spots are x1 = (0.8, 0.6), x2 = (0.6, 0.8), x3 = (0.4, 0.6), and x4 = (0.6, 0.4).
For this domain and parameter set, the numerical computation of the nonlinear algebraic system for the source strengths give S1 = S2 = 2.82, and
S3 = S4 = 5.69 > Σ2 . Based on our stability criterion, the two spots with
the larger source strengths are predicted to undergo splitting. The full numerical results show that the spots x1 and x2 begin to deform at t = 11,
undergo self-replication after t = 21, and then ultimately approach a steady
state 6−spot pattern when t ≈ 581. This numerical experiment confirms our
asymptotic spot-replication criterion. Many further numerical experiments
are done in §3.7.
In Chapter §4, we consider two different types of instabilities of multispot quasi-equilibrium solutions to the GS model that occur in different
parameter regions. In contrast to the spot-splitting instability occurring in
the high feed-rate regime, as considered in Chapter §3, in Chapter §4 we
formulate a certain eigenvalue problem associated with the angular mode
m = 0 in order to study competition and oscillatory profile instabilities of
multi-spot patterns in the low feed-rate regime A = O(ε(− ln ε)1/2 ). Recall
that in the low feed-rate regime A = O(ε1/2 ) in a one-dimensional domain
unstable eigenvalues can enter the right half-plane either along the Im(λ) = 0
axis or through a Hopf-bifurcation, resulting in either a competition instability or an oscillatory profile instability of the spike amplitudes, respectively
(cf. [54] and [86]).
Some theoretical instability thresholds for the 2-D GS model for the low
feed-rate regime A = O(ε(− ln ε)1/2 ) have been derived previously from a
rigorous analysis of a nonlocal eigenvalue problem in [99], [101], and [100].
With a different scaling of the parameters, and to leading order in ν, this
previous NLEP theory relies on certain properties of the solution of the radially symmetric scalar ground state problem w′′ + ρ−1 w′ − w + w2 = 0 for the
fast variable from (1.7b), together with a constant leading order approximation for the slow variable u in the inner region. With this approximation for
25
1.6. Objectives And Outline
Figure 1.4: With A = 2.35, D = 1, ε = 0.02, in a square domain [0, 1]×[0, 1],
we compute numerical solutions to (1.7) from an initial 4-spot pattern with
spots initially equally spaced on a ring of radius 0.2 centered at (0.6, 0.6).
The asymptotic theory yields the source strengths S1 = S2 = 2.82 (two
dull spots), and S3 = S4 = 5.69 > Σ2 (two bright spots). The two spots
with larger source strengths are predicted to split. The numerical solutions
are plotted as time evolves. At t = 11 the two spots begin to deform, and
undergo replication after t = 21. When t = 581, a steady state 6−spot
pattern is approached. The numerical simulation confirms our asymptotic
spot-replication criterion.
26
1.6. Objectives And Outline
the inner solution near each spot, a nonlocal eigenvalue problem is derived
and analyzed to leading order accuracy in ν. This NLEP theory provides a
qualitative way to understand the mechanisms for competition and oscillatory instabilities. However, since the instability thresholds from this NLEP
theory are only accurate to leading order in ν, our higher order stability theory based on accounting for all logarithmic correction terms in ν is essential
for providing accurate instability thresholds for moderately small values of
ε.
By studying our eigenvalue problem for m = 0 numerically we show that,
similar to the one-dimensional case, eigenvalues can enter the right halfplane Re(λ) > 0 through either a Hopf bifurcation, leading to an oscillatory
profile instability, or along the real axis Im(λ) = 0, leading to a competition instability. The eigenvalue problem corresponding to the mode m = 0
consists of k separate local eigenvalue problems that are coupled together
through a homogeneous linear algebraic system and a nonlinear algebraic
system for the source strengths. A numerical method to compute instability
thresholds from this non-standard eigenvalue formulation is proposed and
implemented. Finally, by combining the profile instability results with the
self-replication threshold results of Chapter §3, we plot phase diagrams for
certain multi-spot patterns in simple domains that illustrate specific parameter ranges where each instability occurs. The predictions from these phase
diagrams are compared with full numerical simulations of the GS model.
The outline of Chapter §4 is as follows. In §4.1, we briefly review the
analysis of Chapter §3 that constructed a quasi-equilibrium k-spot pattern
with an error smaller than any power of ν = −1/ ln ε. In addition, we state
the eigenvalue problem corresponding to m = 0, and discuss the two distinct instability types associated with this problem. Then, we develop a
numerical algorithm that efficiently calculates the threshold conditions for
the two types of profile instabilities. In §4.2, some analytical results from [99]
and [101] for both one-spot and multi-spot patterns, which were obtained
from a leading order in ν = −1/ ln ε NLEP theory, are summarized. From
a perturbation calculation for ν ≪ 1, we show that to leading order our
constructions of the quasi-equilibrium solution and the eigenvalue problem
reproduce those results obtained previously in the NLEP theory of [99] and
[101]. From our eigenvalue problem that accounts for all logarithmic correction terms in ν, in §4.3 we numerically calculate the oscillatory instability
threshold for a one-spot solution, Moreover, we also compute competition
and oscillatory instability thresholds for two-spot patterns in R2 . Then, in
§4.4 and §4.5 we consider finite domains such as the unit circle and square
for both one-spot or certain symmetric multi-spot patterns. The resulting
27
1.6. Objectives And Outline
theoretical instability thresholds are again confirmed from full numerical
simulations of the GS model (1.7). Finally in §4.6, we conclude with a short
discussion and a list of some open problems.
28
Chapter 2
Dynamics and Oscillatory
Instabilities of Spikes in the
One-Dimensional Gray-Scott
Model
2.1
The Dynamics of k-Spike Quasi-Equilibria: A
Stefan Problem
In this section we first derive the ODE-PDE Stefan-type problem that determines the time-dependent trajectories of the spike locations for (1.6) in
the intermediate regime O(1) ≪ A ≪ O(ε−1/2 ).
To do so we first motivate the scalings of u, v, and the slow time that
are needed for describing spike dynamics when O(1) ≪ A ≪ O(ε−1/2 ).
In the inner region, we introduce a scaling such that Auv = O(1), with
v = O(A) as suggested by the equilibrium theory of §4 of [54] We also
introduce the slow time σ = σ0 t, with σ0 ≪ 1. With v = Avj , u = uj /A2 ,
and y = ε−1 [x − xj (σ)], where σ = σ0 t, (1.6) becomes
dxj ′
vj = vj′′ − vj + uj vj2 ,
−ε−1 σ0
dσ
σ0 τ dxj
uj D ′′
− 2
u
+
ε
1
−
− uj vj2 ,
u′j =
j
A
dσ
εA2
A2
(2.1a)
(2.1b)
where the primes on uj and vj indicate derivatives in y. Multiplying both
sides of (2.1b) by εA2 , we have the leading order equation Du′′j0 = 0, and
the next order term is εA2 uj vj2 with uj vj2 = O(1), which suggests that
uj = uj0 + O(εA2 ), where uj0 is a constant. This enforces from the equation
for vj that vj = vj0 + O(εA2 ), and σ0 = ε2 A2 . Since uj is independent of y
to leading order, the left-hand side of the equation for uj can be neglected
only when σ0 τ εA2 /A2 ≪ 1. When σ0 = ε2 A2 , this condition is satisfied
only when τ ε3 A2 ≪ 1.
29
2.1. The Dynamics of k-Spike Quasi-Equilibria
This simple scaling argument suggests that we expand the solution in
the j th inner region as
u=
1 u0j + εA2 u1j + · · · ,
2
A
v = A v0j + εA2 v1j + · · · ,
(2.2a)
where umj = umj (y, σ) and vmj (y, σ) depend on the inner variable y, and
the slow time σ is defined by
y ≡ ε−1 [x − xj (σ)] ,
σ ≡ ε2 A2 t .
(2.2b)
Upon substituting (2.2) into (1.6), and assuming that τ ε3 A2 ≪ 1, we obtain
the leading-order problem
′′
2
v0j
− v0j + u0j v0j
= 0,
u′′0j = 0 ,
−∞ < y < ∞ .
(2.3)
2
.
Du′′1j = u0j v0j
(2.4)
At next order, we obtain on −∞ < y < ∞ that
2
′
′′
,
− v1j + 2u0j v0j v1j = −u1j v0j
− x′j v0j
v1j
From (2.3) we take u0j to be independent of y. The leading-order solution
is then written as
1
,
v0j = γj w ,
(2.5)
u0j =
γj
where γj = γj (σ), referred to as the amplitude of the j th spike, is to be
found. Here w(y) on −∞ < y < ∞ satisfies
w′′ − w + w2 = 0 ;
w(±∞) = 0 ,
w(0) > 0 ,
w′ (0) = 0 .
(2.6)
The unique homoclinic of (2.6) is w = 32 sech2 (y/2). Therefore, from (2.4),
we get on −∞ < y < ∞ that
′′
Lv1j ≡ v1j
− v1j + 2wv1j = −γj2 w2 u1j − x′j γj w′
Du′′1j = γj w2 .
(2.7)
′
Since Lw = 0, the solvability condition for vij in (2.7) yields that
Z
Z ∞
2
γj ∞
d
u1j
x′j
w3 dy .
w′ dy = −
3 −∞
dy
−∞
(2.8)
Upon integrating (2.8) by parts twice, and noting that w and u′′1j are even
functions of y, we obtain
Z
Z ∞
∞ 3
2
γj ′
u1j (+∞) + u′1j (−∞)
w dy .
(2.9)
x′j
w′ dy =
6
−∞
−∞
30
2.1. The Dynamics of k-Spike Quasi-Equilibria
The explicit form of w is then used to evaluate the integrals in (2.9) to get
j = 1, · · · , k .
(2.10)
x′j = γj u′1j (+∞) + u′1j (−∞) ,
Now consider the outer region defined where |x − xj | = O(1) for j =
1, · · · , k. Since the term ε−1 uv 2 in (1.6) is localized near each x = xj ,
its effect on the outer solution Rfor u can be calculated in the sense of dis∞
tributions. From (2.2a), and −∞ w2 dy = 6, we obtain that ε−1 uv 2 →
R
Pk
Pk
∞
2
j=1 γj
j=1 6γj δ(x − xj ). This leads to the
−∞ w dy δ(x − xj ) =
outer problem for u(x, σ) given by
τ ε2 A2 uσ = Duxx + (1 − u) −
k
X
j=1
6γj δ(x − xj ) ,
|x| ≤ 1 ,
with ux = 0 at x = ±1. The matching condition between the inner and
outer solutions for u yields
u(xj (σ), σ) =
1
≪ 1,
γj A2
′
ux (x±
j (σ), σ) = u1j (±∞) .
(2.11)
We summarize our asymptotic construction as follows:
Principal Result 2.1: Assume that τ ε3 A2 ≪ 1. Then, in the intermediate
regime O(1) ≪ A ≪ O(ε−1/2 ), the GS model (1.6) can be reduced to the
coupled ODE-PDE Stefan-type problem
2
2
τ ε A uσ = Duxx + (1 − u) −
k
X
j=1
6γj δ(x − xj ) ,
|x| ≤ 1 ,
h
i
dxj
−
,
σ)
+
u
(x
,
σ)
,
j = 1, · · · , k ,
= γj ux (x+
x j
j
dσ
1
u(xj (σ), σ) =
,
j = 1, · · · , k ,
γj A2
(2.12a)
(2.12b)
(2.12c)
with ux (±1, σ) = 0. Here σ = ε2 A2 t is the slow time scale, and xj (σ) is the
center of the j th spike.
We observe that (2.12a) is a heat equation with singular Dirac source
terms, and that (2.12b) become explicit ODE’s only when we can determine ux (x±
j , σ) analytically. Finally, the constraints in (2.12c) implicitly
determine the spike amplitudes γj (σ), for j = 1, · · · , k. As a remark, the
interface motion in (2.12b) resulting from the average of the flux of ux across
the interface differs from that of the classic Stefan moving boundary problem (cf. [74]) from mathematical theories of phase change that involve the
difference in the flux of ux across the interface.
31
2.1. The Dynamics of k-Spike Quasi-Equilibria
2.1.1
Multi-Spike Quasi-Equilibria: The Quasi-Steady
Limit τ ε2 A2 ≪ 1
We suppose that τ ≪ ε−2 A−2 so that u in (2.12a) is quasi-steady. With
this assumption, we readily calculate from (2.12a), together with ux = 0 at
x = ±1, that
cosh(θ(x+1))
1 − g1 cosh(θ(x1 +1)) , −1 ≤ x < x1
sinh(θ(x−xj ))
sinh(θ(xj+1 −x))
− gj+1 sinh(θ(xj+1 −x
, xj ≤ x ≤ xj+1 ,
1 − gj sinh(θ(xj+1
u=
−x
))
j
j ))
1 − g cosh(θ(1−x)) ,
x < x ≤ 1.
k cosh(θ(1−xk ))
k
(2.13)
In the middle expression above the index j ranges from j = 1, . . . , k − 1.
Here θ ≡ D −1/2 and u = 1 − gj at x = xj . From this solution we calculate
ux as x → x±
j , and we impose the required jump conditions [Dux ]j = 6γj
−
for j = 1, · · · , k as seen from (2.12a). Here [ζ]j ≡ ζ(x+
j ) − ζ(xj ). This leads
to the matrix problem
6
(2.14)
Bg = √ Γe,
D
where the matrices B and Γ are defined by
c1 d1
0
···
0
d1 c2
d2
···
0
γ1 · · · 0
.. , Γ ≡ .. . .
.
..
..
B ≡ ... . . .
.
.
.
. .. . (2.15)
.
0 · · · dk−2 ck−1 dk−1
0 · · · γk
0 ···
0
dk−1 ck
The vectors g and e are gT ≡ (g1 , · · · , gk ), eT ≡ (1, · · · , 1). The matrix
entries of B are given explicitly by
c1 = coth(θ(x2 − x1 )) + tanh(θ(1 + x1 )) ,
ck = coth(θ(xk − xk−1 )) + tanh(θ(1 − xk )) ,
cj = coth(θ(xj+1 − xj )) + coth(θ(xj − xj−1 )) ,
dj = −csch(θ(xj+1 − xj )) ,
(2.16)
j = 2, · · · , k − 1 ,
j = 1, · · · , k − 1 .
Next, we write the constraint (2.12c) in matrix form and combine it with
(2.14) to get
√ D
1
1 −1
−1
γ=
(2.17)
Be − 2 BΓ e ,
g = e − 2Γ e.
A
6
A
32
2.1. The Dynamics of k-Spike Quasi-Equilibria
where γ ≡ (γ1 , · · · , γk )t . Since Γ−1 depends on γ, (2.17) is a nonlinear
algebraic system for the spike amplitudes γj for j = 1, · · · , k. For A ≫ 1,
(2.17) reduces asymptotically to the two-term result
√
6
D
√ Γ−1
B I−
e + O(A−4 ) ,
(2.18)
γ=
0
2
6
A D
where I is the identity matrix. Here Γ−1
0 is the inverse of the diagonal matrix
Γ0 defined by
(Be)1 · · ·
0
..
..
..
Γ0 ≡
(2.19)
,
.
.
.
0
···
(Be)k
where (Be)j denotes the j th component of the vector Be. Upon using the
identity coth µ − cschµ = tanh(µ/2), we can write (2.18) component-wise as
√
6
D
√ rj + O(A−4 ) ,
(Be)j 1 −
γj =
6
A2 D
rj ≡
BΓ−1
0 e
(Be)j
j
, (2.20a)
where
(Be) =
θ
2 (x2
− x1 ) + tanh (θ(1 + x1 ))
..
.
tanh θ2 (xj − xj−1 ) + tanh θ2 (xj+1 − xj )
..
.
θ
tanh 2 (xk − xk−1 ) + tanh (θ(1 − xk ))
tanh
With this approximation, and since Γ−1 ∼
reduces asymptotically to
g =e−
A2
6
√
D
√6 Γ−1
D 0
.
(2.20b)
for A ≫ 1, (2.17) for g
−4
Γ−1
0 e + O(A ) .
(2.21)
This asymptotically determines the unknown constants gj for j = 1, · · · , k
in (2.13) with an error O(A−4 ).
Next, we derive an explicit form for the ODE’s in (2.12b). By calculating
′ t
′
′
ux (x±
j ) from (2.13), we readily derive that x = (x1 , · · · , xk ) satisfies
1
x′ = − √ ΓQ g ,
D
(2.22)
33
2.1. The Dynamics of k-Spike Quasi-Equilibria
where Q is the tridiagonal matrix defined by
e1
f1
0
···
0
−f1 e2
f
·
·
·
0
2
..
..
.
.
.
..
..
..
Q≡ .
.
0
· · · −fk−2 ek−1 fk−1
0
···
0
−fk−1 ek
with matrix entries
,
e1 = − coth(θ(x2 − x1 )) + tanh(θ(1 + x1 )) ,
ek = coth(θ(xk − xk−1 )) − tanh(θ(1 − xk )) ,
ej = − coth(θ(xj+1 − xj )) + coth(θ(xj − xj−1 )) ,
fj = csch(θ(xj+1 − xj )) ,
(2.23a)
(2.23b)
j = 2, · · · , k − 1 ,
j = 1, · · · , k − 1 .
Finally, by combining (2.22) and (2.17), we obtain the following asymptotic result for the dynamics of k-spike quasi-equilibria:
Principal Result 2.2: Assume that O(1) ≪ A ≪ O(ε−1/2 ) and that τ satisfies τ ε2 A2 ≪ 1. Then, the quasi-equilibrium solution for v(x, σ) satisfies
v(x, σ) ∼ A
2
3
2 sech (y/2).
k
X
j=1
γj w ε−1 (x − xj (σ)) ,
(2.24)
where w(y) =
The corresponding outer approximation for u is
given in (2.13) where the coefficients gj in (2.13) for j = 1, · · · , k are given
asymptotically in (2.21). For A ≫ 1, the spike amplitudes γj (σ) are given
asymptotically in terms of the instantaneous spike locations xj by (2.20a).
Finally, the vector of spike locations satisfy the ODE system
1
6
dx
−1
√
√
∼−
ΓQ I −
Γ0
e,
(2.25)
dσ
D
A2 D
with σ = ε2 A2 t. Here Γ0 is defined in (2.19) and Γ is defined in (2.15).
The equilibrium positions of the spikes satisfy Γ Q g = 0. In equilibrium,
γj is a constant independent of j, and hence g = ce where c is some constant.
Consequently, the equilibrium spike locations satisfy Qe = 0. By using
(2.23), this leads to xj = −1 + (2j − 1)/k for j = 1, · · · , k.
The leading-order
approximation for the ODE’s in (2.25) is obtained by
√
D
using Γ ∼ 6 Γ0 + O(A−2 ), and g ∼ e + O(A−2). With this approximation,
34
2.2. Oscillatory Profile Instabilities of k-Spike Quasi-Equilibria
which neglects the O(A2 ) terms, (2.25) reduces to
1
2
2 θ
′
(x2 − x1 )
,
tanh [θ(1 + x1 )] − tanh
x1 ∼ −
6
2
1
′
2 θ
2 θ
xj ∼ −
(xj − xj−1 ) − tanh
(xj+1 − xj )
,
tanh
6
2
2
for j = 1, · · · , k − 1 ,
1
2
2 θ
′
(xk − xk−1 ) − tanh [θ(1 − xk )] .
tanh
xk ∼ −
6
2
2.2
(2.26)
Oscillatory Profile Instabilities of k-Spike
Quasi-Equilibria
We now analyze the stability of the k-spike quasi-equilibrium solution of §2.1
to instabilities occurring on a fast O(1) time scale. Since the spike locations
drift slowly with speed O(ε2 A2 ) (cf. (2.25)), in our stability analysis we make
the asymptotic approximation that the spikes are at some fixed locations
x1 , · · · , xk . This asymptotic separation of time scales with “frozen” spike
locations allows for the derivation of an NLEP governing fast instabilities.
Let ue and ve be the quasi-equilibrium solution constructed in §2.1. We
substitute u(x, t) = ue + eλt η(x) and v(x, t) = ve + eλt φ(x) into (1.6), and
then linearize to obtain
ε2 φxx − φ + 2Aue ve φ + Ave2 η = λφ ,
Dηxx − (1 + τ λ) η −
ε−1 ve2 η
−1
= 2ε
|x| ≤ 1 ;
ue ve φ ,
φx (±1) = 0 ,
|x| ≤ 1 ;
(2.27a)
ηx (±1) = 0 .
(2.27b)
We then look for a localized eigenfunction for φ in the form
φ(x) =
k
X
j=1
φj ε−1 (x − xj ) ,
(2.28)
with φj → 0 as |y| → ∞. Since ve ∼ Aγj w and ue ∼ 1/(γj A2 ) near x = xj ,
we obtain from (2.27a) that φj (y) satisfies
φ′′j − φj + 2wφj + A3 γj2 w2 η(xj ) = λφj ,
−∞ < y < ∞ .
(2.29)
Next, we consider (2.27b). Since φj is localized near each spike, the
spatially inhomogeneous coefficients in (2.27b) can be approximated by
35
2.2. Oscillatory Profile Instabilities of k-Spike Quasi-Equilibria
masses. In this way, and by using ve ∼ Aγj w, ue ∼ 1/(γj A2 ), and
RDirac
∞
2
for x near xj that, in a distributional sense,
−∞ w dy = 6, we obtain R
∞
2
−1 2
2 2
2ε−1 ue ve φ ∼ A
−∞ wφj dy δ(x−xj ) and ε ve ∼ 6A γj δ(x−xj ). Therefore, the outer problem for η in (2.27b) becomes
Dηxx − 1 + τ λ + 6A2
k
X
j=1
γj2 δ(x − xj ) η
Z +∞
k
X
2
=
wφj dy δ(x − xj ) , (2.30)
A
−∞
j=1
with ηx = 0 at x = ±1. Defining [ξ]j by [ξ]j ≡ ξ(xj+ ) − ξ(xj− ), we obtain
the following equivalent problem for η:
Dηxx − (1 + τ λ) η = 0 ,
[η]j = 0 ,
|x| ≤ 1 ;
ηx (±1) = 0 ,
[Dηx ]j = −6ωj + 6A2 γj2 η(xj ) ,
!
R∞
wφ
dy
2
j
R−∞
.
ωj ≡ −
∞
2
A
−∞ w dy
(2.31a)
j = 1, .., k ;
(2.31b)
Next, we calculate ηj ≡ η(xj ) from (2.31), which is needed in (2.29). To
do so, we solve (2.31a) on each subinterval and then use the jump conditions
in (2.31b). This leads to the matrix problem
Eλ η =
6
[D(1 + τ λ)]1/2
ω,
(2.32)
where the vectors ω and η are defined by ω t = (ω1 , · · · , ωk ) and η t =
(η1 , · · · , ηk ), and where t denotes transpose. The matrix Eλ in (2.32) is
defined in terms of a tridiagonal matrix Bλ by
c1,λ d1,λ 0
···
0
..
..
d1,λ . . . . . .
.
.
6A2
2
.
.
.
.
.
.
Γ , Bλ ≡ 0
Eλ ≡ Bλ + p
.
.
.
.
0
D(1 + τ λ)
..
..
..
..
.
.
.
.
dk−1,λ
0
···
0 dk−1,λ ck,λ
(2.33)
36
2.2. Oscillatory Profile Instabilities of k-Spike Quasi-Equilibria
Here Γ is the diagonal matrix of spike amplitudes defined in (2.15). The
matrix entries of Bλ are
c1,λ = coth(θλ (x2 − x1 )) + tanh(θλ (1 + x1 )) ,
ck,λ = coth(θλ (xk − xk−1 ) + tanh(θλ (1 − xk )) ,
cj,λ = coth (θλ (xj+1 − xj )) + coth (θλ (xj − xj−1 )) ,
dj,λ = −csch (θλ (xj+1 − xj )) ,
(2.34)
j = 2, · · · , k − 1 ,
j = 1, · · · , k − 1 .
√
In (2.34), θλ is the principal branch of the square root for θλ ≡ θ0 1 + τ λ,
with θ0 ≡ D −1/2 . Notice that when λ = 0, Bλ = B, where B was defined in
(2.15).
Next, we invert (2.32) to obtain
R∞
!
−1
w
E
φ
dy
1
12
λ
−∞
R∞
η=
E −1 ω = − p
,
2
1/2 λ
A D(1 + τ λ)
[D(1 + τ λ)]
−∞ w dy
(2.35)
t
where φ = (φ1 , · · · , φk ). Substituting (2.35) into (2.29), we obtain the
following NLEP in terms of a new matrix Cλ :
!
R∞
12A2
−∞ w (Cλ φ) dy
′′
2
R∞
p
=
λφ
;
C
≡
φ − φ + 2wφ − w
Γ2 Eλ−1 .
λ
2 dy
w
D(1
+
τ
λ)
−∞
(2.36)
Since Γ is a positive definite diagonal matrix and Eλ is symmetric, we
can decompose Cλ as
Cλ = SX S −1 ,
(2.37)
where X is the diagonal matrix of eigenvalues χj of Cλ and S is the matrix
of its eigenvectors sj . We then set ψ = S −1 φ to diagonalize (2.36), and
we rewrite Cλ in terms of Bλ by using (2.33). This leads to the following
stability criterion for O(1) time scale instabilities:
Principal Result 2.3: The k-spike quasi-equilibrium solution of §2.1 with
fixed spike locations is stable on a fast O(1) time scale if the following k
NLEP’s on −∞ < y < ∞, given by
!
R∞
wψ
dy
−∞
= λψ ;
ψ → 0 as |y| → ∞ ,
ψ ′′ − ψ + 2wψ − χj (τ λ)w2 R ∞ 2
−∞ w dy
(2.38)
only have eigenvalues with Re(λ) < 0. Here χj (τ λ) for j = 1, · · · , k are the
eigenvalues of the matrix Cλ defined by
#−1
"
p
D(1 + τ λ)
Bλ Γ−2
.
(2.39)
Cλ = 2 I +
6A2
37
2.2. Oscillatory Profile Instabilities of k-Spike Quasi-Equilibria
We now analyze (2.38). Let τ = O(1) and assume that the inter-spike
distances dj = xj+1 − xj for j = 0, · · · , k are O(1). Here, for j = 0 and
j = k we define d0 = x1 + 1 and dk = 1 − xk , respectively. Then, for
A ≫ 1, (2.39) yields Cλ ∼ 2I so that χj ∼ 2 for j = 1, · · · , k. Since χj is a
constant with χj > 1 in this limit, the result of Theorem 1.4 of [98] proves
that Re(λ) < 0. This guarantees stability for A ≫ 1 when τ = O(1) and
dj = xj+1 − xj = O(1).
Next, we consider the limit A ≫ 1, τ = O(1), but we will allow for the
inter-spike distances dj = xj+1 − xj to be small but with dj ≫ O(ε). Recall
that the analysis above and in §2.1 leading to Principal Result 2.3 required
that dj ≫ O(ε). We will show that for the scaling regime dj = O(A−2/3 ) ≫
O(ε) of closely spaced spikes, and with O(1) ≪ A ≪ O(ε−1/2 ), the NLEP
(2.38) can have an unstable eigenvalue for any τ > 0. For simplicity we will
only consider a closely spaced equilibrium configuration with j = 1, · · · , k −
1, and d0 = dk = L/2. In this limit it is readily shown from (2.34) that
1 −1 0 · · · 0
−1 2 −1 · · · 0
1
..
.
.
.
.
.
.
.
.
B0 ,
B0 ≡ .
Bλ ∼
.
(2.40)
.
.
.
.
θλ L
0 · · · −1 2 −1
0 · · · 0 −1 1
Moreover, for A ≫ 1 and with spikes of a uniform spacing L ≪ 1, we obtain
from (2.20) that the spikes have a common amplitude given by
√
√
D
θ0 L
L
D
(Be)j =
tanh
(2.41)
∼ .
γj ∼
6
3
2
6
Substituting (2.40) and (2.41) into (2.39), we obtain that the eigenvalues χj
of Cλ are given by
p
#−1
D(1 + τ λ) 36
rj
6Drj −1
=2 1+ 2 3
,
χj ∼ 2 1 +
6A2
L2
θλ L
A L
"
(2.42)
where rj for j = 1, · · · , k are the eigenvalues of the matrix B0 defined in
(2.40). Appendix E of [40] and Theorem 1.4 of [98] prove that when χj is
constant, then Re(λ) > 0 if and only if χj < 1 for j = 1, · · · , k.
The stability threshold is determined by χm ≡ minj=1,··· ,k (χj ) = 1,
which depends on the largest eigenvalue rm ≡ maxj=1,···k (rj ) of B0 . By
calculating rm and setting χm = 1, we obtain that the k-spike equilibrium
38
2.2. Oscillatory Profile Instabilities of k-Spike Quasi-Equilibria
solution is unstable for any τ > 0 on the regime O(1) ≪ A ≪ O(ε−1/2 )
when L < L∗ , where
6Drm 1/3
,
rm ≡ 2 [1 + cos(π/k)] .
(2.43)
L∗ ≡
A2
The result (2.43) shows that competition instabilities in the intermediate
regime O(1) ≪ A ≪ O(ε−1/2 ) can only occur if the spikes are sufficiently
close with inter-spike separation O(A−2/3 ). If we did set A = O(1) in (2.43),
then L∗ = O(1) is consistent with the scalings in [54] and [86] for competition
instabilities of equilibrium and quasi-equilibrium spike patterns in the low
feed-rate regime A = O(1).
Next, we obtain our main instability result that oscillatory instabilities
of k-spike quasi-equilibria can occur when τ = O(A4 ) ≫ 1 and with O(1)
inter-spike separation distances. From the choice
of the principal value of the
√
square root, we obtain that Re(θλ ) = θ0 Re( 1 + τ λ) → +∞ on |arg(λ)| < π
as τ → ∞. Therefore, for τ ≫ 1, and for xj+1 − xj = O(1), we calculate
from the matrix entries of Bλ in (2.34) that Bλ → 2I in |arg(λ)| < π.
Therefore, with τ = τ̃ A4 , where τ̃ = O(1), we get from (2.39) that Cλ and
its eigenvalues χj are given asymptotically by
"
#−1
#−1
"
√
√
Dτ̃ λ −2
Dτ̃ λ −2
Cλ ∼ 2 I +
Γ
; χj ∼ 2 1 +
γj
j = 1, · · · , k .
3
3
(2.44)
This limiting expression for χj suggests that we define τH by τ̃ = 9D −1 γj4 τH ,
−1
√
so that C ∼ 2 1 + τH λ
I. Therefore, in the scaling regime τ = O(A4 ),
the stability of k-spike quasi-equilibria is determined by the NLEP (2.38)
with the single multiplier
χ∞
2
√
,
=
1 + τH λ
9A4 τH γj4
when τ =
≫ 1.
D
(2.45)
This limiting NLEP was derived for equilibrium spike solutions in [19], [18],
[63], and [54] in the intermediate regime. From the rigorous analysis of
[18] and [54], this NLEP has a Hopf bifurcation at some τH = τH0 . From
numerical computations, τH0 ≈ 1.748, and Re(λ) < 0 only when τH < τH0
(cf. [19], [54]). Although this limiting NLEP has a continuous spectrum on
the non-negative real axis Re(λ) ≤ 0, there are no edge bifurcations arising
from the end-point λ = 0 (cf. [18], [54]).
The scaling law for τ in (2.45) shows that there are k distinct values of
τ where complex conjugate eigenvalues appear on the imaginary axis. The
39
2.2. Oscillatory Profile Instabilities of k-Spike Quasi-Equilibria
minimum of these values determines the instability threshold for τ . Finally,
by using (2.20) to calculate the spike amplitudes asymptotically for A ≫ 1,
we obtain the following main instability result:
Principal Result 2.4: Let τ = O(A4 ) with xj+1 − xj = O(1) and O(1) ≪
A ≪ O(ε−1/2 ). Then, the frozen k-spike quasi-equilibrium solution of §2.1
develops an oscillatory instability due to a Hopf bifurcation when τ increases
past τh , where
4
DA4
6
√ rj
, j = 1, · · · , k .
τH0 (Be)4j 1 −
j=1,··· ,k
144
A2 D
(2.46)
Here τH0 ≈ 1.748, while (Be)j and rj are defined in terms of the spike
locations by (2.20).
For an equilibrium k-spike pattern where xj = −1 + (2j − 1)/k for j =
1, · · · , k, we calculate from (2.20b) that (Be)j = 2 tanh (θ0 /k) and rj =
[2 tanh (θ0 /k)]−1 for j = 1, · · · , k. This leads to the following equilibrium
stability threshold, which agrees asymptotically with the following result
given in Proposition 4.3 of [54]:
τh = min (τhj ) , τhj ∼
DA4
τh ∼
τH0 tanh4
9
θ0
k
3
√
1−
2
A D tanh (θ0 /k)
4
.
(2.47)
An important remark concerns the range of validity of Principal Result
2.4 with respect to τ . The derivation of (2.46) assumed that τ ε2 A2 ≪ 1,
while the scaling law for instabilities predicts that τ = O(A4 ). Therefore,
(2.46) only holds in the subregime O(1) ≪ A ≪ O(ε−1/3 ) of the intermediate
regime.
2.2.1
Numerical Experiments of Quasi-Equilibrium Spike
Layer Motion
We now give two examples illustrating our results of §2.1 for slow spike
dynamics.
Experiment 2.1: A two-spike evolution
Consider a two-spike evolution with parameter values D = 1.0, A = 10.0,
τ = 5.0, and ε = 0.005. The initial spike locations are x1 (0) = −0.20 and
x2 (0) = 0.80. In Fig 2.1(a) we plot the spike layer trajectories versus the
slow time σ, computed numerically from (2.25), which shows the gradual approach to the equilibrium values at x1 = −1/2 and x2 = 1/2. In Fig. 2.1(c)
40
2.2. Oscillatory Profile Instabilities of k-Spike Quasi-Equilibria
we plot the spike amplitudes versus σ. A plot of the quasi-equilibrium solution at several instants in time is shown in Fig. 2.1(d). In Fig. 2.1(b) we plot
the two Hopf bifurcation values τhj , for j = 1, 2, versus σ calculated from
(2.46). In these figures the solid curves were obtained when computing for
the spike amplitudes from the nonlinear algebraic system (2.17), while the
dotted curves correspond to using the two-term approximation (2.18). For
the spike trajectories shown in Fig. 2.1(a) these two curves are indistinguishable. In the plots of the spike locations and spike amplitudes in Fig. 2.1(a)
and Fig. 2.1(c) the marked points are the full numerical results computed
from (1.6) using the adaptive-grid software of [8]. From these figures we
observe that the asymptotic and full numerical results agree very closely.
An important observation from Fig. 2.1(b) is that the stability threshold
τh (σ), defined by τh (σ) ≡ minj=1,2 [τhj (σ)], is an increasing function of σ
with τh (0) ≈ 12.5 and τh (∞) ≈ 67.7. This monotone behavior of τh (σ),
together with the initial value τh (0) > τ = 5.0, implies that there is no dynamic triggering of an oscillatory instability in the spike amplitudes before
the equilibrium two-spike pattern is reached.
More generally, for a k-spike pattern, we have been unable to prove analytically from the DAE system (2.25) and (2.18) that the stability threshold for τ , given by τh (σ) ≡ minj=1,··· ,k (τhj (σ)) of (2.46), must always be
an increasing function of σ. However, we have performed many numerical experiments to examine this condition, and in each case we have found
numerically that τh (σ) is a monotonically increasing function of σ. This
leads to the conjecture that there are no dynamically triggered oscillatory instabilities of multi-spike quasi-equilibria in the intermediate regime
O(1) ≪ A ≪ O(ε−1/2 ). In other words, τ < τh (0) is a sufficient condition
for stability of the quasi-equilibrium multi-spike pattern for all σ > 0. In
contrast, for the simple case of symmetric two-spike quasi-equilibria in the
low feed-rate regime A = O(1), dynamically triggered instabilities due to
either Hopf bifurcations or from the creation of a real positive eigenvalue
were established analytically in [86].
Experiment 2.2: A three-spike evolution
Next, we consider a three-spike evolution with parameter values D = 1.0,
A = 10.0, τ = 2.0, and ε = 0.005. The initial spike locations are x1 (0) =
−0.50, x2 (0) = 0.20, and x3 (0) = 0.80. In Fig 2.2(a) an Fig 2.2(c) we plot
the spike layer trajectories and spike amplitudes, respectively, computed
from (2.25) and the two-term approximation (2.18). Snapshots of the quasiequilibrium solution are shown in Fig. 2.2(d). In Fig. 2.2(b) we plot the
three Hopf bifurcation values τhj , for j = 1, · · · , 3, versus σ calculated from
41
2.2. Oscillatory Profile Instabilities of k-Spike Quasi-Equilibria
1.00
240
×
0.75 × × × × × ×
0.50
×
× × ×× ×
× × × × × ×
200
×
160
0.25
xj 0.00
−0.25 × × × × ×
−0.50
τhj120
×××
× × ×× × ×
× × × × ×
80
×
40
−0.75
−1.00
0
0
5
10
15
20
25
30
35
40
0
10
20
σ
30
40
σ
(a) xj vs. σ
(b) τhj vs. σ
0.21
3.0
0.18 × ××
×
0.15
2.5
× ×
× ×
× ×
γj
0.12
×
0.09 × ×
××
×
× ×
× ×
2.0
×
× ×
× ×
×
×
×
×
×
× ×
××
× × ××
1.5
1.0
0.5
0.06
0
v
20
σ
(c) γj vs. σ
40
0.0
−1.00 −0.75 −0.50 −0.25
0.00
0.25
0.50
0.75
1.00
x
(d) v vs. x
Figure 2.1: Experiment 2.1: Slow evolution of a two-spike quasi-equilibrium
solution for ε = 0.005, A = 10, and D = 1.0, with x1 (0) = −0.2 and
x2 (0) = 0.8. Top Left: xj vs. σ. Top Right: τhj vs. σ. Bottom Left: γj
vs. σ. Bottom Right: v vs. x at σ = 0 (heavy solid curve), σ = 10 (solid
curve), and σ = 50 (dotted curve). Except for the plot of v vs. x, the solid
curves correspond to computing the spike amplitudes from (2.17), while the
dotted curves correspond to the two-term approximation (2.18). The crosses
in the plots of xj and γj vs. σ are the full numerical results computed from
(1.6).
42
2.3. Oscillatory Drift Instabilities of k-Spike Patterns
(2.46). In the plots of τhj , γj and xj versus σ the solid curves correspond to
computing the spike amplitudes from the nonlinear algebraic system (2.17),
while the dotted curves correspond to the two-term approximation (2.18).
In the plots of xj and γj the marked points are the full numerical results
computed from (1.6) using the software of [8]. As in Experiment 2.1, the
asymptotic and full numerical results agree rather closely.
From Fig. 2.1(b) we again observe that the stability threshold for τ ,
given by τh (σ) ≡ minj=1,2,3 [τhj (σ)], is an increasing function of σ with
τh (0) ≈ 2.6 and τh (∞) ≈ 14.0. This monotonicity of τh (σ), together with
τh (0) > τ = 2.0, precludes the occurrence of a dynamically triggered Hopf
bifurcation in the spike amplitudes.
2.3
Oscillatory Drift Instabilities of k-Spike
Patterns
In this section we compute numerical solutions to the Stefan problem (2.12)
when τ ε2 A2 = O(1) and O(ε−1/3 ) ≪ A ≪ O(ε−1/2 ). For notational convenience, so as not to confuse spike locations with gridpoints of the discretization, we re-label the spike trajectories as ξj (σ), for j = 1, · · · , k. Then,
defining τ0 ≡ ε−2 A−2 τ = O(1) to be the key bifurcation parameter, (2.12)
on |x| ≤ 1 becomes
τ0 uσ = Duxx + (1 − u) −
ξj′
= γj
h
ux (ξj+ , σ)
k
X
j=1
6γj δ(x − ξj ) ;
i
+ ux (ξj− , σ) ,
u(ξj (σ), σ) = 1/(γj A2 ) ,
ux (±1, σ) = 0 ,
j = 1, · · · , k ,
j = 1, · · · , k .
(2.48a)
(2.48b)
(2.48c)
By using a SLEP approach, which is related to the method pioneered
in [69], it was shown in [53] that a one-spike equilibrium solution will become unstable at some critical value of τ0 to an oscillatory drift instability
associated with a pure imaginary small eigenvalue λ ≪ 1 of the linearization. As τ0 increases above this critical value a complex conjugate pair of
eigenvalues crosses into the right half-plane Re(λ) > 0, leading to the initiation of a small-scale oscillatory motion of the spike location. This oscillatory drift instability is the dominant instability mechanism in the subregime
O(ε−1/3 ) ≪ A ≪ O(ε−1/2 ) of the intermediate regime.
43
2.3. Oscillatory Drift Instabilities of k-Spike Patterns
1.00
240
0.75 ××××××××××××××××××××× ××× ××
×
0.50
× ×
× × ××
0.25 ×××××
××××××××
×××××× ×× ×××
×× ×
xj 0.00
−0.25
× ×
× × ××
−0.50 ××××
×××××××××××××××
×× ××× ×× ×
−0.75
× ×
× × ××
−1.00
200
160
τhj120
80
40
0
0
20
40
60
80
100
120
140
160
180
200
0
20
40
60
80
σ
100
120
140
160
180
200
σ
(a) xj vs. σ
(b) τhj vs. σ
0.15
3.5
3.0
×
0.12 ×××××
××
×××
××× ×
××
××××
××× × ×××××××× × ×
××
×
××
γj
×
×
×× ×
0.09
×× ×
×
×
×
×
××
××
××××
2.5
2.0
×
×
×
× × ×
× ××
v
1.0
0.5
0.06
0
20
40
60
80
1.5
100
120
σ
(c) γj vs. σ
140
160
180
200
0.0
−1.00 −0.75 −0.50 −0.25
0.00
0.25
0.50
0.75
1.00
x
(d) v vs. x
Figure 2.2: Experiment 2.2: Slow evolution of a three-spike quasi-equilibrium
solution for ε = 0.005, A = 10, and D = 1.0, with x1 (0) = −0.5, x2 (0) =
0.2, and x3 (0) = 0.80, obtained from the two-term asymptotic result (2.18)
for the spike amplitudes. Top Left: xj vs. σ. Top Right: τhj vs. σ. Bottom
Left: γj vs. σ. Bottom Right: v vs. x at σ = 0 (heavy solid curve), σ = 40
(solid curve), and σ = 140. Except for the plot of v vs. x, the solid curves
correspond to computing the spike amplitudes from (2.17), while the dotted
curves correspond to the two-term approximation (2.18). The crosses in the
plots of xj and γj vs. σ are the full numerical results computed from (1.6).
44
2.3. Oscillatory Drift Instabilities of k-Spike Patterns
For the one-spike case where k = 1 we now show that the condition
for the stability of the equilibrium solution to the Stefan problem (2.48) is
equivalent to that obtained in [53] using the SLEP method. We let U ≡ U (x)
and γ1 = γ1e denote the equilibrium solution to (2.48) with ξ1 = 0. Then,
U satisfies
DUxx + (1 − U ) = 0 ,
[DUx ]0 = 6γ1e ;
|x| < 1 ;
Ux (±1) = 0 ,
1
.
U (0) =
γe A2
(2.49a)
(2.49b)
Here we have defined [v]0 ≡ v(0+ ) − v(0− ). We readily calculate that
(
0 (1+x))
1 − B cosh(θ
, −1 ≤ x < 0 ;
cosh θ0
(2.50a)
U=
cosh(θ0 (1−x))
, 0 < x ≤ 1,
1 − B cosh θ0
where θ0 ≡ D −1/2 , and
γ1e
√
B D
≡
tanh θ0 ,
3
B ≡1−
1
.
γ1e A2
By solving the quadratic equation for γ1e we get
"
#
r
r
√
D
A21e
12θ0
tanh θ0 1 + 1 − 2 , A1e ≡
.
γ1e =
6
A
tanh θ0
(2.50b)
(2.50c)
For A ≫ 1, this expression reduces to
√
1
3
D
√
γ1e =
tanh θ0 − 2 + O(A−4 ) , B = 1 −
+ O(A−4 ) .
3
A
A2 D tanh θ0
(2.50d)
For δ ≪ 1, we perturb the equilibrium solution as
u(x, σ) = U (x) + δeλσ φ(x) ,
γ1 = γ1e + δβeλσ ,
ξ1 = δeλσ . (2.51)
We substitute (2.51) into (2.48a), and collect O(δ) terms to get Dφxx − (1 +
τ0 λ)φ = 0 on |x| ≤ 1. From the linearization of the ODE (2.48b), we obtain
δλeλσ = γ1e + δβeλσ Ux (0+ ) + Ux (0− ) + δeλσ
φx (0+ ) + φx (0− ) + Uxx (0+ ) + Uxx (0− ) .
(2.52a)
45
2.3. Oscillatory Drift Instabilities of k-Spike Patterns
In addition, the conditions [Dux ]ξ1 = 6γ1 and u(ξ1 ) = 1/(γ1 A2 ) become
D Ux (0+ ) − Ux (0− ) + δeλσ Uxx (0+ ) − Uxx (0+ ) + φx (0+ ) − φx (0− )
(2.52b)
= 6 γ1e + εδeλσ ,
U (0± ) + δeλt Ux (0± ) + φ(0± ) =
δβ
1
− 2 2 eλσ .
2
γ1e A
γ1e A
(2.52c)
Since Ux (0+ ) + Ux (0− ) = 0, Uxx (0+ ) = Uxx (0− ), and Ux (0+ ) = ±3γ1e /D,
we collect the O(δ) terms in (2.52) to obtain the following problem for φ:
Dφxx − (1 + τ0 λ) φ = 0 ,
|x| ≤ 1 ;
φx (±1) = 0 ,
3γ
β
1e
[Dφx ]0 = 6β ;
φ(0± ) = ∓
− 2 2,
D
γ1e A
1
+
−
λ = 2γ1e Uxx (0) +
φx (0 ) + φx (0 ) .
2
(2.53a)
(2.53b)
(2.53c)
The solution to (2.53a) satisfying the prescribed values for φ(0± ) is
cosh(θλ (x + 1))
, −1 ≤ x < 0 ;
cosh θλ
cosh(θλ (1 − x))
, 0 < x ≤ 1,
φ = C+
cosh θλ
φ = C−
(2.54a)
(2.54b)
√
where θλ ≡ θ0 1 + τ0 λ, and
C± = ∓
β
3γ1e
− 2 2.
D
γ1e A
(2.55)
The jump condition [Dφx ]0 = 6β, then yields that β = 0. Then,
we substi
tute values for φx (0± ) and Uxx (0) = −D −1 1 − 1/(γ1e A2 ) into (2.53c) to
obtain
1
1
3γ1e
θλ tanh θλ −
.
(2.56)
1−
λ = 2γ1e
D
D
γ1e A2
Finally, by using (2.50c) for γ1e , we readily derive that λ satisfies the transcendental equation
"
#2
r
i
hp
θ0
A21e
1 + τ0 λ tanh θ0 tanh θλ − 1 , µ ≡
tanh θ0 1 + 1 − 2
.
λ=µ
6
A
(2.57)
46
2.3. Oscillatory Drift Instabilities of k-Spike Patterns
√
Here θλ ≡ θ0 1 + τ0 λ, θ0 ≡ D −1/2 , while A1e is defined in (2.50c). Equation (2.57) is identical to that derived in equation (5.5) of [53] from using
the SLEP method based on a linearization of (1.6) around a one-spike equilibrium solution.
We introduce ω, τd , and ζ, by λ = µω, τ0 = τd /µ, and ζ = τd ω. Then,
from (2.57), ζ is a root of
F (ζ) ≡
ζ
− G(ζ) = 0 ,
τd
G(ζ) ≡
p
h p
i
1 + ζ tanh θ0 tanh θ0 1 + ζ − 1 .
(2.58)
By examining the roots of (2.58) in the complex ζ plane, the following result
was proved in §5 of [53].
Proposition 2.5: There is a complex conjugate pair of pure imaginary
eigenvalues to (2.57) at some unique value τd = τdh depending on D. For
any τd > τdh there are exactly two eigenvalues in the right half-plane. These
eigenvalues have nonzero imaginary parts when τdh < τd < τdm , and they
merge onto the positive real axis at τd = τdm . They remain on the positive
real axis for all τd > τdm .
The numerically computed Hopf bifurcation value τdh is plotted versus
D in Fig. 2.3(a). In Fig. 2.3(a) we also plot the magnitude |ωh | of the
pure imaginary eigenvalues ωh = ±i|ωh | at τd = τdh . Since τ0 = τd /µ and
τ = ε−2 A−2 τ0 , the Hopf bifurcation value for the onset of an oscillatory
drift instability for a one-spike solution is
"
#2
r
θ0
A21e
µ≡
tanh θ0 1 + 1 − 2
.
τtw ∼ ε A τ0d , τ0d
6
A
(2.59)
Recall from (2.47) that there is an oscillatory instability in the amplitude of
an equilibrium spike when τ = τh = O(A4 ). Thus, τh ≪ τtw when O(1) ≪
A ≪ O(ε−1/3 ) and τtw ≪ τh when O(ε−1/3 ) ≪ A ≪ O(ε−1/2 ). In Fig. 2.3(b)
we plot log10 (τtw ) and log10 (τh ) versus A, log10 (τh ) versus A, showing the
exchange in the intermediate regime. For the equilibrium problem on the
infinite line this exchange in the dominant instability mechanism was also
noted in [65] and [19]. As a remark, we notice that ωh , representing the
(scaled) temporal frequency of small oscillations, satisfies ωh → 0 in the
infinitely long domain limit D → 0. Therefore, the existence of an oscillatory
instability requires a finite domain.
−2
−2
τdh
,
≡
µ
47
2.3. Oscillatory Drift Instabilities of k-Spike Patterns
4.0
4.0
3.0
3.0
log10(τ)
2.0
2.0
τdh , |ωh |
1.0
1.0
0.0
0.25
0.50
0.75
1.00
1.25
D
(a) τdh and |ωh | vs. D
1.50
0.0
5.0
6.0
7.0
8.0
9.0
10.0
11.0
12.0
A
(b) log 10 (τtw ) and log10 (τh ) vs. A
Figure 2.3: Left Figure: The drift instability thresholds τdh (heavy solid
curve) and |ωh | (solid curve) versus D. Right figure: Plots of log10 (τh )
(heavy solid curve) from (2.47) with k = 1 and log10 (τtw ) (solid curve) from
(2.59) versus A for D = 0.75 and ε = 0.015. This shows the exchange in
the dominant instability mechanism in the intermediate regime.
2.3.1
Numerical Solution of the Coupled ODE-PDE Stefan
Problem
To compute numerical solutions to the Stefan problem (2.48) we adapt the
numerical method of [89] for computing solutions to a heat equation with
a moving singular Dirac source term. We use a Crank-Nicolson scheme to
discretize (2.48a) together with a forward Euler scheme for the ODE (2.48b).
For simplicity we first consider (2.48a) for one spike where k = 1. Let h
and ∆t denote the space step and time step, respectively. We set ∆t = h2 /2
to satisfy the stability requirement of the forward Euler scheme. The number
of grid points is M = 1 + 2/h, and we label the j th grid point by xj =
−1 + (j − 1)h for j = 1, · · · , M . The total time period is Tm , and we label
σn = n∆t for n = 1, · · · , Tm /∆t. At time σn , the solution u(xj , σn ) at the
n )T .
j th grid point is approximated by Ujn , and we label Un = (U1n , · · · , UM
Also, the spike location ξ1 (σn ) and spike amplitude γ1 (σn ) are approximated
by ξ1n and γ1n , respectively.
As in [89] we approximate the delta function δ(x − ξ1 ) in (2.48a) with
the discrete delta function d(1) (x − ξ1 ), where d(1) (y) is given by
(
(2h − |y|)/(4h2 ) ,
|y| ≤ 2h ,
(2.60)
d(1) (y) =
0,
otherwise .
48
2.3. Oscillatory Drift Instabilities of k-Spike Patterns
The numerical approximation d(1) of the delta function in (2.48a) spreads
the singular force to the neighboring grid points within its support. Next,
we write the constraint of (2.48c), given by u(ξ1 (σ), σ) = 1/(γ1 A2 ), in the
form
Z ∞
1
.
(2.61)
u(x, σ)δ(x − ξ1 (σ)) dx =
u(ξ1 (σ), σ) =
γ1 A2
−∞
With Ujn ≈ u(xj , σn ), ξ1n ≈ ξ1 (σn ), and γ1n ≈ γ1 (σn ), the discrete version of
(2.61) is
X
1
u(ξ1n , σn ) ≈ h
Ujn d(2) (xj − ξ1n ) = n 2 ,
(2.62)
γ1 A
j
where d(2) (y) is a further numerical approximation to the delta function
given explicitly by
2
|y| ≤ h ,
1 − (y/h) ,
1
(2)
2
(2.63)
d (y) =
2 − 3|y|/h + (y/h) ,
h ≤ |y| ≤ 2h ,
h
0,
otherwise .
The function d(2) interpolates grid values Ujn to approximate the requirement
u(ξ1n , σn ) = 1/(γ1n A2 ) at the spike location. A rough outline of the algorithm
for the numerical solution to (2.48) to advance from the nth to the (n + 1)th
time-step is as follows: We first use (2.48b) to take a forward Euler step to
get the new location ξ1n+1 given Un and γ1n . Then, we use the approximate
condition
1
1
1
n+1
u(ξ1 , σn+1 ) ≈
,
(2.64)
+
2A2 γ1n γ1n+1
on the right-hand side of (2.62) together with the Crank-Nicolson discretization of (2.48a) to solve for γ1n+1 . Then, we calculate Un+1 from the discretization of (2.48a) using the value of γ1n+1 . Finally, we set n = n + 1, and
repeat the iteration.
In order to obtain higher accuracy, we use a fourth order accurate scheme
as suggested in [89] to approximate the second order differential operator
n , where
uxx as uxx (xj , σn ) ≈ D2j
n
≡
D2j
1
n − 6U n + 14U n − 4U n −
(Uj+4
j+3
j+2
j+1
12h2
1
n + 16U n − 30U n + 16U n
(−U
j+2
j+1
j
j−1
12h2
1
n − 6U n + 14U n − 4U n −
(U
j−4
j−3
j−2
j−1
12h2
n ), j = 1,
15Ujn + 10Uj−1
n ), 2 ≤ j ≤ N ,
− Uj−2
n ), j = M .
15Ujn + 10Uj+1
49
2.3. Oscillatory Drift Instabilities of k-Spike Patterns
n
Here U0n and UM
+1 are ghost points outside each end of the boundaries at
x = ±1. The Neumann condition ux (±1, t) = 0 is also discretized as
ux (x1 , σn ) ≈ (−3U0n − 10U1n + 18U2n − 6U3n + U4n )/(12h) ,
n
n
n
n
n
ux (xM , σn ) ≈ (3UM
+1 + 10UM − 18UM −1 + 6UM −2 − UM −3 )/(12h) .
Eliminating the ghost points from the discretization of uxx , we obtain the
M × M coefficient matrix T = T0 /(12h2 ), where
T0 ≡
−145/3 56
−6 −8/3
1
0
0
0
···
0
58/3
−36 18 −4/3
0
0
0
0
···
0
−1
16 −30
16
−1
0
0
0
···
0
0
−1
16
−30
16 −1
0
0
···
0
0
0
−1
16
−30 16
−1
0
···
0
..
..
..
..
..
.
.
.
.
.
0
···
0
0
−1 16 −30
16
−1
0
0
···
0
0
0
−1
16
−30 16
−1
0
···
0
0
0
0 −4/3 18 −36
58/3
0
···
0
0
0
1 −8/3 −6
56 −145/3
Next, we outline how we calculate the fluxes in (2.48b). For convenience,
in the notation of this paragraph we omit the superscript n at time σn .
In order to approximate the one-sided first order derivatives ux (ξ1± , σn ) in
(2.48b), we first use the solution values at gridpoints on each side of ξ1 to interpolate the values at points that are equally distributed near ξ1 . Then, we
approximate ux (ξ1± , σn ) by differencing values at these points. For instance,
assuming that the closest grid point on the left-hand side of the spike is xj ,
we use six point values (ū, Uj , Uj−1 , Uj−2 , Uj−3 , Uj−4 ) with ū = u(ξ1 , σn ) =
1/(γ1 A2 ) to interpolate the solution at x = (ξ1 − 3h, ξ1 − 2h, ξ1 − h, ξ1 ). Denoting the results to be (U1− , U2− , U3− , U4− ) with U4− = u(ξ1 , σn ) = 1/(γ1 A2 ),
we can use them for estimating ux (ξ1− , σn ) as
1
3
ux (ξ1− , t) ≈ (−3U3− + U2− − U1− )/h .
2
3
(2.65a)
Similarly, we obtain (U1+ , U2+ , U3+ , U4+ ) at x = (ξ1 , ξ1 + h, ξ1 + 2h, ξ1 + 3h)
by interpolation, and we then discretize to obtain
1
3
ux (ξ1+ , t) ≈ (3U2+ − U3+ + U4+ )/h .
2
3
(2.65b)
50
.
2.3. Oscillatory Drift Instabilities of k-Spike Patterns
Next, we discretize (2.48a) by the Crank-Nicolson scheme to get
µD
1
µD
1
n+1
T U
= (1 − µ)I +
T Un
(1 + µ)I −
2
2
2
2
− 3µ dn+1 γ1n+1 + dn γ1n + p , (2.66)
where µ ≡ ∆t/τ0 and pt ≡ (µ, µ, · · · , µ). Here dn+1 denotes the discretization of the delta function by d(1) at time σn+1 . Denoting the coefficient
matrix of Un+1 to be A and that of Un to be B, the system above can be
written in the simpler form
AUn+1 = BUn − 3µ dn+1 γ1n+1 + dn γ1n + p .
(2.67)
In (2.67), only the boldface variables are matrices and vectors. We then
approximate (2.48c) by the discrete form (2.62). We write this interpolation
as a dot product Nn+1 Un+1 , where
1
1
1
n+1 n+1
+
.
(2.68)
N
U
=
2A2 γ1n γ1n+1
Since A has full rank, we then left multiply (2.67) by Nn+1 A−1 to get a
quadratic equation for γ1n+1 given by
h
3µNn+1 A−1 dn+1 γ1n+1 − Nn+1 A−1 (BUn − 3µdn γ1n + p)
1
1
1 1 i
= 0 . (2.69)
+
−
n
n+1
2
2
2A γ1
2A γ1
Since A ≫ 1, we can solve (2.69) for the correct root γ1n+1 . We then calculate
Un+1 using (2.67) and start the next iteration by using a forward Euler step
on (2.48b) to advance the spike location.
This numerical method can be readily extended to treat (2.48) for two
or more spikes. For instance, consider the case of two spikes. With the same
Crank-Nicolson scheme, we let d1 and d2 be the discrete approximations of
δ(x−ξ1 ) and δ(x−ξ2 ) in (2.48a), respectively, with the discrete delta function
d(1) . Define the row vectors Nn+1
and Nn+1
to the discrete versions of d(2)
1
2
near ξ1 and ξ2 , respectively. The conditions u(ξjn+1 , σ n+1 ) = 1/(γjn+1 A2 ),
can then be approximated by the two discrete constraints
!
1
1
1
, j = 1, 2 .
(2.70)
+
Nn+1
Un+1 =
j
2A2 γjn γjn+1
51
2.3. Oscillatory Drift Instabilities of k-Spike Patterns
The Crank-Nicolson discretization of (2.48a) with k = 2 is written as
AUn+1 = BUn −3µ(dn+1
γ1n+1 +dn+1
γ2n+1 )−3µ(dn1 γ1n +dn2 γ2n )+p . (2.71)
1
2
Upon imposing the constraints (2.70) we obtain the following system for
γ1n+1 and γ2n+1 :
1
1
n+1
2
2A γj
h
1 1 i
−1
n
n n
n n
= 0,
− Nn+1
A
(BU
−
3µ(d
γ
+
d
γ
)
+
p)
−
1
1
2
2
j
2A2 γjn
3µNn+1
A−1 (dn+1
γ1n+1 + dn+1
γ2n+1 ) +
1
2
j
j = 1, 2 .
(2.72)
After calculating γ1n+1 and γ2n+1 from this system, we then compute Un+1
from (2.72), and update the locations of the spikes.
2.3.2
Numerical Experiments of Oscillatory Drift
Instabilities
We now perform some numerical experiments on (2.48) to verify the drift
instability threshold of a one-spike solution given in (2.59). We also use
the numerical scheme of §2.3.1 to compute large-scale oscillatory motion for
some one- and two-spike patterns.
For each of the numerical experiments below we give initial spike locations ξj (0) = ξj0 , for j = 1, · · · , k, and we choose the initial condition
u(x, 0) for (2.48) to be the quasi-equilibrium solution (2.13) with gj = 1 and
xj = ξj0 for j = 1, · · · , k in (2.13). In all of the numerical computations
below we chose the mesh size h = 0.01 and the diffusivity D = 0.75. For
D = 0.75, the stability threshold from Proposition 2.5 is computed numerically as τdh = 2.617.
Experiment 2.3: A one-spike solution near equilibrium: Testing the instability threshold
Let D = 0.75 and A = 28.5. Then, from (2.59) we calculate τ0d ≈ 4.19.
For an initial spike location at ξ1 (0) = 0.1, in Fig 2.4 we plot the numerically
computed spike layer trajectory ξ1 versus σ for six values of τ0 . Comparing
Fig. 2.4(d) with Fig. 2.4(e) we see that the amplitude of the oscillation
grows slowly when τ0 = 4.22, and decays slowly when τ0 = 4.20. From
Fig. 2.4(f) we observe that the drift Hopf bifurcation value is τ0d ≈ 4.21,
which compares favorably with the theoretical prediction of τ0d ≈ 4.19 from
(2.59). With regards to the convergence of the numerical scheme for (2.48),
we estimate numerically that τ0d ≈ 4.23 with the coarser meshsize h = 0.02,
52
2.3. Oscillatory Drift Instabilities of k-Spike Patterns
The spike location
The spike location
0.15
0.1
0.1
0.08
0.05
0.06
0
0.04
−0.05
−0.1
0.02
−0.15
0
0
5
10
15
20
25
30
35
40
−0.2
0
20
(a) ξ1 vs. σ for τ0 = 1.0
40
60
100
120
140
160
(b) ξ1 vs. σ for τ0 = 4.0
The spike location
The spike location
0.15
0.4
0.3
0.1
0.2
0.05
0.1
0
0
−0.05
−0.1
−0.1
−0.2
−0.15
−0.3
80
0
5
10
15
20
25
30
35
40
−0.2
0
(c) ξ1 vs. σ for τ0 = 4.4
20
40
60
80
100
120
140
160
180
200
180
200
(d) ξ1 vs. σ for τ0 = 4.20
The spike location
The spike location
0.2
0.15
0.15
0.1
0.1
0.05
0.05
0
0
−0.05
−0.05
−0.1
−0.1
−0.15
−0.15
−0.2
0
20
40
60
80
100
120
140
160
(e) ξ1 vs. σ for τ0 = 4.22
180
200
−0.2
0
20
40
60
80
100
120
140
160
(f) ξ1 vs. σ for τ0 = 4.21
Figure 2.4: Experiment 2.3: Testing the stability threshold for initial values
near the equilibrium value. Plots of ξ1 versus σ with ξ1 (0) = 0.1, D = 0.75,
and A = 28.5, for different values of τ0 . The numerical threshold τ0d ≈ 4.21
in the plot (f ) compares well with the theoretical prediction τ0d ≈ 4.19.
53
2.3. Oscillatory Drift Instabilities of k-Spike Patterns
and that τ0d ≈ 4.20 for the very fine meshsize h = 0.005. As a trade-off
between accuracy and computational expense, we chose h = 0.01 in our
computations.
Experiment 2.4: A one-spike solution: Large-scale oscillatory dynamics
We again let D = 0.75 and A = 28.5. However, we now choose the
initial spike location ξ1 (0) = 0.3, which is not near its equilibrium value. In
Fig. 2.5 we plot the numerically computed spike layer trajectory ξ1 versus
σ for τ0 = 4.20 and τ0 = 4.22. For the smaller value of τ0 the spike slowly
approaches its steady state at ξ1 = 0. However, for τ0 = 4.22, the spike
location exhibits a sustained large-scale oscillation.
The spike location
The spike location
0.5
0.6
0.4
0.4
0.3
0.2
0.2
0.1
0
0
−0.2
−0.1
−0.2
−0.4
−0.3
−0.6
−0.4
−0.5
0
20
40
60
80
100
120
140
160
(a) ξ1 vs. σ for τ0 = 4.20
180
200
−0.8
0
5
10
15
20
25
30
35
40
(b) ξ1 vs. σ for τ0 = 4.22
Figure 2.5: Experiment 2.4: Plots of ξ1 versus σ with ξ1 (0) = 0.3, D = 0.75,
and A = 28.5. (a) τ0 = 4.20; (b) τ0 = 4.22.
Experiment 2.5: A two-spike pattern: Oscillatory drift instabilities and the
breather mode
We now compute two-spike solutions. For D = 0.75 and A = 63.6, in
Fig. 2.6(a) and Fig. 2.6(b) we plot the numerically computed spike trajectories with initial values ξ1 (0) = −0.38 and ξ2 (0) = 0.42 for two values of τ0 .
For τ0 = 16 the spike trajectories develop a large-scale sustained oscillatory
motion. In each case, the observed oscillation is of breather type, characterized by a 180◦ out of phase oscillation in the spike locations. A breather
instability was shown in [38] to be the dominant instability mode for instabilities of equilibrium transition layer patterns for a Fitzhugh-Nagumo type
model. It is also the dominant instability mode for equilibrium spike patterns of the GS model in the high feed-rate regime A = O(ε−1/2 ) (see [55]).
54
2.3. Oscillatory Drift Instabilities of k-Spike Patterns
The spike location
The spike location
0.8
0.8
0.6
0.6
0.4
0.4
0.2
0.2
0
0
−0.2
−0.2
−0.4
−0.4
−0.6
−0.6
−0.8
0
5
10
15
20
25
30
35
−0.8
0
5
(a) ξj vs. σ for τ0 = 15
10
15
20
25
30
35
(b) ξj vs. σ for τ0 = 16
The spike location
0.6
0.6
0.4
0.4
0.2
0.2
0
0
−0.2
−0.2
−0.4
−0.4
−0.6
−0.6
−0.8
0
10
20
30
40
50
60
70
80
−0.8
0
10
(c) ξj vs. σ for τ0 = 15
20
30
40
50
60
70
80
(d) ξj vs. σ for τ0 = 17
Figure 2.6: Experiment 2.5: Spike trajectories ξj versus σ for a two-spike
pattern with D = 0.75 and A = 63.6. Top row: the initial values ξ1 (0) =
−0.38 and ξ2 (0) = 0.42 with τ0 = 15 and τ0 = 16. Bottom Row: the initial
values ξ1 (0) = −0.55 and ξ2 (0) = 0.45 with τ0 = 15 and τ0 = 17.
For the same values of D and A, in Fig. 2.6(c) and Fig. 2.6(d) we plot the
numerically computed spike trajectories with initial values ξ1 (0) = −0.55
and ξ2 (0) = 0.45 for τ0 = 15 and τ0 = 17, respectively.
2.3.3
Integral Equation Formulation
In this subsection we show how to cast the Stefan problem (2.48) for a
one-spike solution into an equivalent integral equation formulation. We let
K(x, σ; η, s) to be the Green’s function satisfying
τ0 Kσ = DKxx − K + δ(x − η)δ(σ − s) ,
|x| < 1 ;
Kx (±1, σ) = 0 , (2.73)
55
2.3. Oscillatory Drift Instabilities of k-Spike Patterns
with initial value K = 0 for 0 < σ < s. The solution for K is represented as
an eigenfunction expansion as
∞
Dn2 π 2 (σ − s)
H(σ − s) −(σ−s)/τ0 h 1 X
exp −
e
+
K(x, σ; η, s) =
τ0
2
4
τ0
n=1
nπ
i
nπ
(ξ + 1) cos
(η + 1) .
cos
2
2
(2.74)
By using Green’s identity, a straightforward calculation shows that the
solution u(x, σ) to (2.48) with one spike can be written in terms of K as
u(x, σ) = 1 + τ0
Z
1
−1
[u(η, 0) − 1] K(x, σ; η, 0) dη
Z σ
γ1 (s)K(x, σ; ξ1 (s), s) ds , (2.75)
−6
0
where ξ1 (s) is the spike trajectory. By imposing the constraint condition
u = 1/(γ1 A2 ) at x = ξ1 (σ), we obtain an integral equation for γ1 (σ) in
terms of the unknown spike location as
1
= 1 + τ0
γ1 (σ)A2
Z
1
−1
[u(η, 0) − 1] K(ξ1 (σ), σ; η, 0) dη
Z σ
γ1 (s)K(ξ1 (σ), σ; ξ1 (s), s) ds . (2.76)
−6
0
Then, by calculating ux as x → ξ1 (σ) from above and from below, we
calculate
ux (ξ1± (σ), σ)
= τ0
Z
1
−1
[u(η, 0) − 1] Kx (ξ1± (σ), σ; η, 0) dη
Z σ
−6
γ1 (s)Kx (ξ1± (σ), σ; ξ1 (s), s) ds . (2.77)
0
Finally, by substituting (2.77) into (2.48c), we obtain the integro-differential
equation
Z 1
dξ1
[u(η, 0) − 1] Kx (ξ1+ (σ), σ; η, 0) + Kx (ξ1− (σ), σ; η, 0) dη
= γ1 (σ) τ0
dσ
−1
Z σ
γ1 (s) Kx (ξ1+ (σ), σ; ξ1 (s), s) + Kx (ξ1− (σ), σ; ξ1 (s), s) ds . (2.78)
−6
0
56
2.4. Discussion
Here u(η, 0) is the initial condition for (2.48). This shows that the speed
of the spike layer at time σ depends on its entire past history. Therefore,
ξ1 (σ) is determined, essentially, by a continuously distributed delay model.
Such problems typically lead to oscillatory behavior when τ0 is large enough.
This suggests the mechanism underlying the oscillatory dynamics computed
in §2.3.2.
We remark that as a result of the infinite series representation of K
in (2.74), together with the constraint (2.76) for γ1 , the integro-differential
equation (2.78) is significantly more complicated in form than a related
integro-differential equation modeling a flame-front on the infinite line that
was studied numerically in [76].
2.4
Discussion
We have studied the dynamics and oscillatory instabilities of spike solutions to the one-dimensional GS model (1.6) in the intermediate regime
O(1) ≪ A ≪ O(ε−1/2 ) of the feed-rate parameter A. In the subregime
O(1) ≪ A ≪ O(ε−1/3 ), and for τ ≪ O(ε−2 A2 ), we have derived an explicit DAE system for the spike trajectories from the quasi-steady limit of
the Stefan problem (2.12). From the analysis of a certain nonlocal eigenvalue problem, it was shown that the instantaneous spike pattern in this
regime will become unstable to a Hopf bifurcation in the spike amplitudes
at some critical value critical value τ = τH = O(A4 ). Alternatively, in the
subregime O(ε−1/3 ) ≪ A ≪ O(ε−1/2 ), and with τ = O(ε−2 A−2 ), oscillatory
drift instabilities for the spike locations were computed numerically from
time-dependent Stefan problem (2.48) with moving sources. In this subregime, the onset of such drift instabilities occur at occur at some critical
value τ = τT W = O(ε−2 A−2 ) be calculated analytically. An open technical
problem is to study the codimension-two bifurcation problem that occurs
when A = O(ε−1/3 ) where both types of oscillatory instability can occur
simultaneously at some critical value of τ = O(ε−4/3 ).
There are two key open problems. The first problem is to extend the numerical approach of [76], used for a flame-front integro-differential equation
model, to compute long-time solutions to the integro-differential equation
formulation (2.78) of the Stefan problem (2.48). With such an approach,
one could compute numerical solutions to (2.48) over very long time intervals to study whether irregular, or even chaotic, large-scale oscillatory
drift behavior of the spike trajectories is possible for the GS model in the
subregime O(ε−1/3 ) ≪ A ≪ O(ε−1/2 ). A second direction of inquiry is to
57
2.4. Discussion
derive Stefan-type problems with moving sources from an asymptotic reduction of related reaction-diffusion systems with localized solutions such as
the Gierer-Meinhardt model with saturation [50], the combustion-reaction
model of [60], the Brusselator model of [49], and the GS model in two spatial dimensions. The derivation of such Stefan problems would allow for the
study of large-scale drift instabilities of localized structures for parameter
values far from their bifurcation values at which a normal form reduction,
such as in [25] and [24], can be applied.
58
Chapter 3
Dynamics and the
Spot-Replication Instability
for the Two-Dimensional
Gray-Scott Model
3.1
k-spot Quasi-Equilibrium Solutions
We first construct a quasi-equilibrium solution to (1.7) for a k-spot pattern
in a two-dimensional domain. The stability of this quasi-equilibrium solution
with respect to spot self-replication is then studied.
For each j = 1, . . . , k, we denote the center of the j th spot by xj =
(xj , yj ) where xj ∈ Ω. We assume that the spots are well-separated in
the sense that dist(xi , xj ) = O(1) for i 6= j and dist(xi , ∂Ω) = O(1) for
i = 1, . . . , k. We then use the method of matched asymptotic expansions
to construct the quasi-equilibrium solution. In an O(ε) neighborhood near
each spot, the solution v is large and has a sharp gradient. In this inner
region for the j th spot, we introduce the new local variables Uj , Vj , and y
by
√
D
ε
Vj ,
y = ε−1 (x − xj ) .
v=
u = √ Uj ,
ε
A D
In terms of these local variables, (1.7) transforms to leading order to
∆y Vj − Vj + Uj Vj2 = 0 ,
∆y Uj − Uj Vj2 = 0 ,
y ∈ R2 .
(3.1)
This leading order inner problem, referred to as the core problem, is the
same as that derived in [56] for the Schnakenburg model. We look for a
radially symmetric solution to this core problem of the form Uj = Uj (ρ)
and Vj = Vj (ρ), where ρ ≡ |y| and ∆y = ∂ρρ + ρ−1 ∂ρ denotes the radially
symmetric part of the Laplacian. The radially symmetric core problem is to
59
3.1. k-spot Quasi-Equilibrium Solutions
solve the coupled BVP system
1
Ujρρ + Ujρ − Uj Vj2 = 0 ,
ρ
1
Vjρρ + Vjρ − Vj + Uj Vj2 = 0 ,
ρ
0<ρ<∞
(3.2a)
0 < ρ < ∞,
(3.2b)
subject to the the boundary conditions
Vj′ (0) = 0 ,
Vj (ρ) → 0 ,
Uj′ (0) = 0 ,
(3.2c)
Uj (ρ) ∼ Sj ln ρ + χ(Sj ) + o(1) ,
as
ρ → ∞.
(3.2d)
We refer to Sj as the source strength of the j th spot.R From the divergence
∞
theorem, it follows from the Uj equation that Sj = 0 Uj Vj2 ρ dρ > 0. In
the far-field behavior (3.2d) for Uj , the constant χ is a nonlinear function of
the source strength Sj . This function must be computed from the solution
to (3.2).
The solution to (3.2) is calculated numerically for a range of values of
Sj > 0 by using the BVP solver COLSYS (cf. [2]). In Fig. 3.1, we plot
χ = χ(Sj ) in the left subfigure, Vj (0) vs. Sj in the middle subfigure, and
Vj (ρ) for different values of Sj in the right subfigure. For Sj > Sv ≈ 4.78, the
profile Vj (ρ) develops a volcano shape, whereby the maximum of Vj occurs
at some ρ > 0. These computations give numerical evidence to support the
claim that there is a unique solution to (3.2) for each Sj > 0.
0.8
0.8
20
0.6
15
5
0
V
χ
Vj(0)
10
j
0.6
0.4
0.4
0.2
0.2
−5
1
2
3
4
5
S
j
(a) χ vs. Sj
6
7
0
0
1
2
3
4
5
6
S
j
(b) Vj (0) vs. Sj
7
8
0
0
5
ρ
10
15
(c) Vj vs. ρ
Figure 3.1: Numerical results for the core problem (3.2) computed by COLSYS ([2]). (a) The function χ vs. Sj ; (b) Vj (0) vs. Sj ; (c) The spot profile
Vj (ρ) for Sj = 0.94, 1.45, 2.79 (solid curves from bottom to top at ρ = 0),
and the volcano profile Vj (ρ) for Sj = 4.79, 5.73, 6.29 (dotted curves from
top to bottom at ρ = 0).
60
3.1. k-spot Quasi-Equilibrium Solutions
Since v is localized near each xj for j = 1, . . . , k, and is exponentially
small in the outer region away from the spot centers, the effect of the nonlinear term uv 2 in the outer region can be calculated in the sense of distributions as
!
√
Z √
k
k
X
D
2πε D X
2
2
2
Sj δ(x − xj ) .
Uj Vj dy δ(x − xj ) ∼
uv ∼ ε
A
R2 Aε
j=1
j=1
Therefore, in the quasi-steady limit, the outer problem for u is
√
k
2π D ε X
D∆u + (1 − u) =
Sj δ(x − xj ) , x ∈ Ω ,
A
(3.3a)
j=1
∂n u = 0 , x ∈ ∂Ω ,
ε Sj ln |x − xj | − Sj ln ε + χ(Sj ) , as x → xj ,
u∼ √
A D
(3.3b)
j = 1...,k.
(3.3c)
The singularity condition above as x → xj was derived by matching the
outer solution for u to√the far-field behavior (3.2d) of the core solution and
by recalling u = ε/(A D)Uj . The problem (3.3) suggests that we introduce
new variables A = O(1) and ν ≪ 1, defined by
√
(3.4)
ν = −1/ ln ε ,
A = νA D/ε .
In terms of these new variables, (3.3) transforms to
k
2πν X
(1 − u)
=
Sj δ(x − xj ) ,
∆u +
D
A
j=1
x ∈ Ω,
∂n u = 0 , x ∈ ∂Ω ,
1
u∼
Sj ν ln |x − xj | + Sj + χ(Sj )ν , as x → xj ,
A
(3.5a)
(3.5b)
j = 1...,k.
(3.5c)
It is important to emphasize that the singularity behavior in (3.5c) specifies
both the strength of the logarithmic singularity for u and the regular, or
non-singular, part of this behavior. This pre-specification of the regular
part of this singularity behavior at each xj will yield a nonlinear algebraic
system for the source strengths S1 , . . . , Sk .
To solve (3.5), we introduce the reduced-wave Green’s function G(x; xj ),
which satisfies
1
∂n G = 0 , x ∈ ∂Ω .
(3.6)
∆G − G = −δ(x − xj ) , x ∈ Ω ;
D
61
3.1. k-spot Quasi-Equilibrium Solutions
As x → xj , this Green’s function has the local behavior
G(x; xj ) ∼ −
1
ln |x − xj | + Rjj + o(1) ,
2π
as
x → xj ,
(3.7)
where Rjj is referred to as the regular part of G at x = xj . In terms of
G(x; xj ) we can represent the outer solution for u in (3.5) as
u =1−
k
X
2πνSi
i=1
A
G(x; xi ) .
Finally, by expanding this representation for u as x → xj and equating the
resulting expression with the required singularity behavior (3.5c), we obtain
the following nonlinear algebraic system for S1 , . . . , Sk :
A = Sj (1+2πνRjj )+νχ(Sj )+2πν
k
X
Si G(xi ; xj ) ,
j = 1, . . . , k . (3.8)
i=1,i6=j
Since ν = −1/ ln ε ≪ 1, it follows that the geometry of the domain Ω and
the spatial configuration (x1 , . . . , xk ) of the spot pattern has a weak, but
not insignificant, influence on the source strengths S1 , . . . , Sk through the
Green’s function and its regular part. The nonlinear algebraic system (3.8)
incorporates all logarithmic correction terms in ν involved in the determination of the source strengths. Given values for the GS parameters A, ε and
D, we first calculate A and ν from (3.4) and then solve (3.8) numerically
for the source strengths S1 , . . . , Sk , which determines the quasi-equilibrium
in each inner region. The result is summarized as follows:
Principal Result 3.1: Assume that ε ≪ 1 and define ν = −1/ ln ε and
√
A = νA D/ε, with A = O(1). Then, the solution v and the outer solution
for u corresponding to a k-spot quasi-equilibrium solution of (1.7) are given
by
k
2πν X
Sj G(x; xj ) ,
u∼1−
A
j=1
v∼
√
k
DX
Vj ε−1 |x − xj | ,
ε
(3.9)
j=1
where (x1 , · · · , xk ) are the centers of the spots, and G(x; xj ) is the reducedwave Green’s function satisfying (3.6). In (3.9), each spot profile Vj (ρ) for
j = 1, . . . , k satisfies the BVP system (3.2) where the source strength Sj in
(3.2d) is to be calculated from the nonlinear algebraic system (3.8).
62
3.1. k-spot Quasi-Equilibrium Solutions
We emphasize that the nonlinear algebraic system (3.8) is the mechanism
through which spots interact with each other and sense the presence of
the domain Ω. This global coupling mechanism is rather significant since
ν = −1/ ln ε is not very small unless ε is extremely small.
We briefly illustrate this construction of a quasi-equilibrium pattern for
the special case of a one-spot solution centered at the midpoint of the unit
square. Many further illustrations of the theory are given in subsequent
sections.
16
1
14
0.8
u(x1)
A
12
10
8
0.6
0.4
6
0.2
4
2
0
1
2
3
4
5
S
6
7
8
0
2
4
6
8
10
12
14
16
A
1
(a) A vs. S1
(b) u(x1 ) vs. A
Figure 3.2: Experiment 3.1: Let Ω = [0, 1] × [0, 1], and set ε = 0.02, D = 1,
and x1 = (0.5, 0.5). (a) A vs. S1 ; the square marks the volcano threshold
Sv = 4.78, and the circle marks the fold point Af = 3.3756 corresponding to
Sf = 0.7499. (b) u(x1 ) vs. A, the square marks Sv = 4.78, and the circle
marks the fold point Sf = 0.7499. The upper branch is for S1 < Sf , while
the lower branch is for S1 > Sf .
Experiment 3.1: One spot in a square: The fold point for A
To illustrate the asymptotic theory, suppose that there is one spot centered at x1 with source strength S1 inside the unit square Ω = [0, 1] × [0, 1].
Then, (3.8) reduces to the scalar nonlinear algebraic equation
A = S1 (1 + 2πνR11 ) + νχ(S1 ).
(3.10)
We fix ε = 0.02 and D = 1, so that ν = 0.2556, and we let x1 = (0.5, 0.5).
Then, by using (3.59) for the Green’s function as given below in §3.6, we
obtain that R11 = 0.7876. In the left subfigure of Fig. 3.2 we plot A vs.
S1 , showing the existence of a fold point at Af = 3.3756 corresponding to
Sf = 0.7499. Thus, A ≥ Af is required for the existence of a one-spot
quasi-equilibrium solution centered at the midpoint of the square. In the
63
3.1. k-spot Quasi-Equilibrium Solutions
right subfigure of Fig. 3.2 we plot u(x1 ) = ν U (0)/A with respect to A. For
A > Af , u has two solution branches. The upper branch corresponds to
S1 < Sf , while the lower branch is for the range S1 > Sf .
In the remainder of this section we derive analytical approximations for
the solution to the nonlinear algebraic system (3.8) for the source strengths.
To do so, it is convenient to first re-write (3.8) in matrix form. For a k-spot
pattern we define the Green’s matrix G, the vector of source strengths s,
and the identity vector e by
1
S1
R11 G12 G13 · · · G1k
1
S2
G21 R22 G23 · · · G2k
G ≡ G31 G32 R33 · · · G3k , s ≡ S3 , e ≡ 1 .
..
..
..
..
..
..
..
.
.
.
.
.
.
.
Sk
1
Gk1 Gk2 Gk3 · · · Rkk
(3.11)
Here Gij ≡ G(xi ; xj ), and Gij = Gji by reciprocity, so that G is a symmetric
matrix. Then, (3.8) is written in matrix form as
A e = s + 2πνG s + νχ(s) ,
(3.12)
where χ(s) is defined by χ(s) = (χ(S1 ), . . . , χ(Sk ))t and t denotes transpose.
We will consider (3.12) for two ranges of D. For D = O(1), we can
obtain a two-term approximation of the source strengths in terms of ν ≪ 1
by expanding s = s0 + νs1 + · · · . Upon substituting this expansion into
(3.12) and collecting powers of ν, we readily obtain the two-term expansion
s = Ae − ν [2πA G e + χ(A)e] + O(ν 2 ) .
(3.13)
This shows that, for ν ≪ 1, the leading order approximation for s is the
same for all of the spots, but that the next order term depends on the spot
locations and the domain geometry.
An interesting special case for multi-spot patterns is when the spatial
configuration (x1 , . . . , xk ) of spots is such that the Green’s matrix G is a
circulant matrix. For instance, this occurs when k spots are equally spaced
on a circular ring that is concentric within a circular disk.
Pk When
Pk G is
−1
circulant, then it has the eigenpair Ge = θe, where θ = k
i=1
j=1 Gij .
For this special case, (3.12) shows that the spots have a common source
strength Sj = Sc for j = 1, . . . , k to all orders in ν, where Sc is the solution
to the single nonlinear algebraic equation
A = Sc + 2πνθSc + νχ(Sc ) .
(3.14)
64
3.1. k-spot Quasi-Equilibrium Solutions
For ν ≪ 1, a two-term approximation for this common source strength is
Sc = A − ν [2πθA + χ(A)] + O(ν 2 ) .
Next, we consider (3.12) for the distinguished limit where D is logarithmically large in ε, given by D = D0 /ν with D0 = O(1). Since the
reduced-wave Green’s function depends on D, we first must approximate it
for D large. Assuming that Ω is a bounded domain, we expand G and its
regular part R for D ≫ 1 as
G ∼ DG−1 + G0 +
1
G1 + · · · ,
D
R ∼ DR−1 + R0 +
1
R1 + · · · .
D
Substituting this expansion into (3.6), and collecting powers of D, we obtain
that G−1 is constant and that G0 satisfies
∆G0 = G−1 − δ(x − xj ) ,
x ∈ Ω;
∂n G0 = 0 ,
x ∈ ∂Ω .
The divergence theorem then shows that G−1 = |Ω|−1 , where |Ω| denotes
the area of Ω. In addition,
the divergence theorem imposed on the G1
R
problem enforces that Ω G0 dx = 0, which makes G0 unique. Next, from
the singularity condition (3.7) for G we obtain for x ≈ xj that
DG−1 + G0 (x; xj ) + · · · ∼ −
1
ln |x − xj | + DR−1 + R0 (x; xj ) + · · · .
2π
Since G−1 = |Ω|−1 , we conclude that R−1 = G−1 = 1/|Ω|. In this way,
we obtain the following two-term expansion for the reduced-wave Green’s
function and its regular part in the limit D ≫ 1:
Rjj ∼
D
(N )
+ Rjj + · · · ,
|Ω|
G(x; xj ) ∼
D
+ G(N ) (x; xj ) + · · · . (3.15)
|Ω|
(N )
Here G(N ) (x; xj ) is the Neumann Green’s function with regular part Rjj ,
determined from the unique solution to
1
− δ(x − xj ) , x ∈ Ω ,
|Ω|
Z
G(N ) dx = 0 ,
= 0 , x ∈ ∂Ω ;
∆G(N ) =
∂n G(N )
(3.16a)
(3.16b)
Ω
G(N ) (x; xj ) ∼ −
1
(N )
ln |x − xj | + Rjj ,
2π
as
x → xj .
(3.16c)
65
3.1. k-spot Quasi-Equilibrium Solutions
We now use this approximation to find approximate solutions to the
nonlinear algebraic system (3.12) in the limit D = D0 /ν ≫ 1 with D0 =
O(1) and ν ≪ 1. Substituting (3.15) into (3.12) we obtain
Ae = s +
2πD0 t
e e s + 2πνG (N ) s + νχ(s) ,
|Ω|
where G (N ) is the Green’s matrix associated with the Neumann Green’s
(N )
(N )
(N )
function, i.e. Gij = G(N ) (xi ; xj ) for i 6= j, and Gjj = Rjj . By expanding
s as s = s0 + νs1 + · · · for ν ≪ 1, we then obtain that s0 and s1 satisfy
2πD0 t
ee s0 = Ae ,
(3.17a)
I+
|Ω|
2πD0 t
ee s1 = −2πG (N ) s0 − χ(s0 ) ,
I+
(3.17b)
|Ω|
where I is the k × k identity matrix. Since et e = k, the leading order
approximation s0 shows that the source strengths have an asymptotically
common value Sc given by
s0 = Sc e ,
2πkD0 −1
Sc ≡ A 1 +
.
|Ω|
This shows that decreasing the area of the domain or increasing the diffusion
parameter D0 both have the same effect of decreasing Sc . The next order
approximation s1 from (3.17) yields
2πD0 t
s1 = − I +
ee
|Ω|
−1 2πSc G (N ) + χ(Sc ) e .
(3.18)
t
0
Since the matrix I + 2πD
|Ω| ee is a rank-one perturbation of the identity,
its inverse is readily calculated explicitly from the Shermann-WoodburyMorrison formula as
(I + µeet )−1 = I −
µeet
,
1 + µet e
µ=
2πD0
,
|Ω|
which determines s1 from (3.18). In this way, we obtain for D = D0 /ν and
ν ≪ 1 that the source strengths have the two-term expansion
µF
2πA (N )
χ(Sc )
G
−
e+
I e ν + O(ν 2 ) . (3.19)
s = Sc e −
1 + µk
1 + µk
1 + µk
66
3.2. The Spot-Splitting Instability
Here Sc ≡ A/(1 + µk), µ ≡ 2πD0 /|Ω|, and F ((x1 , . . . , xk ) is a scalar function denoting the sum of all of the entries of G (N ) , i.e.
t (N )
F (x1 , . . . , xk ) = e G
e=
K X
k
X
i=1 j=1
(N )
Gij .
(3.20)
The k-components of the O(ν) correction to s have, in general, different
values owing to the term involving G (N ) e. A simple calculation shows that
the sum of s is
k χ(Sc )
2πAF
Ak
t
−ν
+
.
(3.21)
es∼
1 + µk
1 + µk
(1 + µk)2
From this expression, we note that et s is minimized when F (x1 , . . . , xk ) is
maximized.
Finally, we remark that if the Neumann Green’s matrix G (N ) is a circulant matrix, then it must have the eigenpair G (N ) e = θ (N ) e, where θ (N ) =
F/k. In this case, (3.19) shows that the spots have the common source
strength given asymptotically by
i
h A
χ(Sc )
F
2πA
µF
e + O(ν 2 ) . (3.22)
−ν
+
−
s=
1 + µk
1 + µk 1 + µk k
1 + µk
Owing to the rather simple structure of the nonlinear algebraic system
(3.12) when the Green’s matrix is circulant, in many of our numerical experiments in the sections below we will focus on k-spot quasi-equilibrium
patterns that lead to this special matrix structure.
3.2
The Spot-Splitting Instability
We now study the stability of a quasi-equilibrium spot pattern to a spot
self-replicating instability that can occur on a fast O(1) time-scale relative
to the slow motion of speed O(ε2 ) of the spot locations. The slow motion
of spots is studied later in Section 3.3. The stability analysis in this section
is similar to that done in [56] for the Schnakenburg model.
We first perturb the quasi-equilibrium solution ue , ve as
u(x, t) = ue + eλ t η(x) ,
v(x, t) = ve + eλ t φ(x) ,
for a given and fixed spatial configuration (x1 , . . . , xk ) of spots. Substituting
this perturbation into (1.7) and linearizing, we obtain the eigenvalue problem
67
3.2. The Spot-Splitting Instability
ε2 ∆φ − (1 + λ)φ + 2Aue ve φ + Ave2 η = 0 ,
D∆η − (1 + τ λ)η − 2ue ve φ −
ve2 η
= 0.
In the inner region near the j th spot, we recall that ue ∼
ve ∼
√
D
ε Vj , where Uj , Vj
= ε−1 (x − xj ), and
(3.23a)
(3.23b)
ε
√
U
A D j
and
is the solution of the core problem (3.2). We then
let y
define Nj and Φj by η = A√ε D Nj and φ =
Then, upon neglecting algebraic terms in ε, (3.23) reduces to
∆y Φj − (1 + λ)Φj + 2Uj Vj Φj + Vj2 Nj
√
D
ε Φj .
= 0,
(3.24a)
∆y Nj − Vj2 Nj − 2Uj Vj Φj = 0 ,
(3.24b)
under the assumption that τ ≪ O(ε−2 ). Next we look for angular perturbations of the form Φj = eimψ Φ̂j (ρ) , Nj = eimψ N̂j (ρ), where Φ̂j and N̂j are
radially symmetric in the inner variable ρ = |y|. Then, from (3.24), N̂j (ρ)
and Φ̂j (ρ) on 0 < ρ < ∞ satisfy
m2
1
Φ̂jρρ + Φ̂jρ − 2 Φ̂j − (1 + λ)Φ̂j + 2Uj Vj Φ̂j + Vj2 N̂j = 0 ,
ρ
ρ
1
m2
N̂jρρ + N̂jρ − 2 N̂j − Vj2 N̂j − 2Uj Vj Φ̂j = 0 ,
ρ
ρ
(3.25a)
(3.25b)
with boundary conditions
Φ̂′j (0) = 0,
N̂j′ (0) = 0,
Φ̂j (ρ) → 0, as ρ → ∞ .
(3.25c)
The specific form for the far-field behavior of N̂j will be different for the
two cases m = 0 and m ≥ 2. For the case m = 1, which corresponds to
translation invariance, it follows trivially that λ = 0. Since this case m = 1
is accounted for by the analysis of Section 3.3 for the slow spot dynamics it
is not considered here.
An instability of (3.25) for the mode m = 2 is associated with the initiation of a peanut-splitting instability. This initial instability is found numerically to lead to a spot self-replication event, whereby a single spot splits
into two identical spots. Instabilities for the higher modes m ≥ 3 suggest
the possibility of more spatially intricate spot self-replication events. Thus,
the eigenvalue problem (3.25) with angular mode m ≥ 2 determines spotsplitting instabilities. For this range of m, the linear operator for Nj in
(3.25b) allows for decay as ρ → ∞ owing to the m2 N̂j /ρ2 term. As such, for
68
3.2. The Spot-Splitting Instability
the modes m ≥ 2 we impose the far-field boundary condition that N̂j′ → 0
as ρ → ∞.
The eigenvalue problem (3.25) is coupled to the core problem (3.2) for
Uj and Vj , and can only be solved numerically. To do so, we first solve (3.2)
numerically by using COLSYS (cf. [2]). Then, we discretize (3.25) by a
centered difference scheme to obtain a matrix eigenvalue problem. By using
the linear algebra package LAPACK [1] to compute the spectrum of this
matrix eigenvalue problem, we estimate the eigenvalue λ0 of (3.25) with
the largest real part as a function of the source strength Sj for different
angular modes m ≥ 2. The instability threshold occurs when Re(λ0 ) = 0.
We find numerically that λ0 is real when Sj is large enough. In the left
subfigure of Fig. 3.3, we plot Re(λ0 ) as a function of the source strength
Sj for m = 2, 3, 4. Our computational results show that the instability
threshold for the modes m ≥ 2 occurs at Sj = Σm , where Σ2 ≈ 4.31,
Σ3 ≈ 5.44, and Σ4 ≈ 6.14. In the right subfigure of Fig. 3.3, we plot the
eigenfunction (Φ̂j , N̂j ) corresponding to λ0 = 0 with m = 2 at Sj = Σ2 . In
this subfigure we have scaled the maximum value of Φ̂j to unity.
1
0.5
(Φj, Nj)
Re(λ0)
0.5
0
−0.5
0
−0.5
−1
−1
1
2
3
4
5
S
j
(a) Re(λ0 ) vs. Sj
6
7
−1.5
2
4
6
ρ
8
10
12
14
(b) (Φ̂j , N̂j ) vs. ρ
Figure 3.3: Numerical results for the principal eigenvalue of (3.25) with
mode m ≥ 2. (a) Re(λ0 ) vs. Sj ; heavy solid curve is for m = 2 with
Σ2 = 4.31, the solid curve is for m = 3 with Σ3 = 5.44, and the dashed
curve is for m = 4 with Σ4 = 6.14. (b) For m = 2, the eigenfunctions
(Φ̂j (ρ), N̂j (ρ)) near λ0 = 0 with Sj = Σ2 ≈ 4.31 are shown. The solid curve
is Φ̂j (ρ), and the dashed curve is N̂j (ρ).
Principal Result 3.2: Consider the 2-D Gray Scott model (1.7) with given
parameters A, D, ε, and τ ≪ O(ε−2 ), on a fixed domain. Calculate A and ν
from (3.4). In terms of A, D, and ν, calculate the source strengths S1 , . . . , Sk
69
3.3. The Slow Dynamics of Spots
for a k-spot quasi-equilibrium pattern from the nonlinear algebraic system
(3.8). Then, if Sj < Σ2 ≈ 4.31, the j th spot is linearly stable to a spot
deformation instability for modes m ≥ 2. Alternatively, for Sj > Σ2 , it is
linearly unstable to the mode m = 2 associated with peanut-splitting.
We remark that in our stability analysis we linearized the GS model
around a quasi-equilibrium solution, where the spots were assumed to be at
fixed locations x1 , . . . , xk , independent of time. However, as shown below
in Section 3.3, the spots have a speed O(ε2 ), so that the source strengths
Sj for j = 1, . . . , k also vary slowly in time. As a result, there can be a
triggered, or dynamically induced, spot-replication instability due to the
slow evolution of Sj . More specifically, for a spot pattern that is initially
stable to self-replication at t = 0 in the sense that Sj < Σ2 at t = 0 for
j = 1, . . . , k, it is possible that as the J th spot moves toward its equilibrium
location in the domain that SJ > Σ2 after a sufficiently long time. Thus,
the source strength of a particular spot (i.e. the J th spot) may drift above
the instability threshold for peanut-splitting as a result of the intrinsic slow
dynamics of the collection of spots. This scenario is similar to other ODE
and PDE problems that have triggered instabilities generated from slowly
varying external bifurcation, or control, parameters. The key difference here,
is that the spot self-replication instability can be triggered from the intrinsic
motion of the collection of spots, and is not due to an externally imposed
control parameter.
Our second remark is that the eigenvalue problem (3.25) with mode
m = 0 corresponds to instabilities in the amplitudes of the spots. For this
mode, we cannot impose that the eigenfunction N̂j is bounded at infinity.
Instead, we must impose that N̂j → Cj ln ρ + Bj as ρ → ∞. This type of
spot profile instability is discussed in detail in Chapter §4.
3.3
The Slow Dynamics of Spots
Next we derive the slow dynamics for the spot locations for a k-spot quasiequilibrium solution to the GS model. The analysis is similar to that in
[56].
In the inner region near the j th spot, we introduce y = ε−1 (x − xj ) and
we expand
√
D
ε
(V0j (ρ) + εV1j (y) + · · · ) .
u = √ (U0j (ρ) + εU1j (y) + · · · ) , v =
ε
A D
70
3.3. The Slow Dynamics of Spots
Note that the subscript 0 in U0j , V0j denotes the order of expansion, and j
denotes that the variables are near the j th spot. In the analysis below we
omit the subscript j if there is no confusion in the notation. The expansions
above for u and v yield the same core problem for U0j and V0j as in (3.2).
At next order, we get that U1 and V1 satisfy
∆y V1 − V1 + 2U0 V0 V1 + V02 U1 = V0′
∆y U1 − 2U0 V0 V1 −
V02 U1
d
|x − xj | ,
dς
(3.26)
= 0,
where we have introduced ς = ε2 t as the slow time variable. We define θ
to be the polar angle for the vector (x − xj ), with xj = xj (ε2 t), so that
d|x−xj |
= −x′j · eθ , where eθ = (cos θ, sin θ)t , xj = (x1 , x2 )t , and t denotes
dς
transpose. The system (3.26) for U1 and V1 can be written in matrix form
as
∆y wj + Mj wj = fj ,
y ∈ R2 ,
(3.27)
where
Mj =
−1 + 2U0 V0 V02
−2U0 V0
−V02
, wj =
V1
U1
, fj =
−V0′ x′j · eθ
.
0
(3.28)
Recall that the outer solution for u is
u=1−
k
X
2πνSj
j=1
A
G(x; xj ) .
The local behavior of the reduced-wave Green’s function as x → xj , written
in terms of the inner variable y, is
G(x; xj ) ∼ −
1
ln |x − xj | + Rjj + ε∇R(xj ; xj ) · y + · · · ,
2π
where ∇f denotes the gradient of the function f . Upon matching the inner
and outer solutions for u near the j th spot, we obtain the far-field behavior
of the inner solution U1j given by
k
i
h
X
Si ∇G(xi ; xj ) · y ,
Uij ∼ −2π Sj ∇R(xj ; xj ) +
i=1, i6=j
as
y → ∞.
71
3.3. The Slow Dynamics of Spots
Therefore, the required far-field behavior for (3.27) is that
0
, as y → ∞ ,
wj →
−~
αj · y
k
X
α1
α
~j =
≡ 2π(Sj ∇Rjj +
Si ∇Gij ) .
α2
(3.29a)
(3.29b)
i=1, i6=j
Here α1 , α2 are the first and second components of the vector α
~ j , respectively.
∗
t
∗
∗
We define P̂j (ρ) = (φ̂j (ρ), ψ̂j (ρ)) to be the radially symmetric solution of
the adjoint problem
∆ρ P̂j∗ + Mtj P̂j∗ = 0 ,
(3.30)
subject to the far-field condition that P̂j∗ → (0, 1/ρ)t as ρ → ∞, where
∆ρ ≡ ∂ρρ + ρ−1 ∂ρ − ρ−2 . We look for solutions Pjc and Pjs of the adjoint
problem ∆y Pj + Mtj Pj = 0 in the form Pjc = P̂j∗ cos θ and Pjs = P̂j∗ sin θ,
where P̂j∗ is a radially symmetric function. In terms of the adjoint solution
Pjc , the solvability condition for (3.27), subject to (3.29a), is that
lim
Z
σ→∞ B
σ
Pjc
· f dy = lim
Z
σ→∞ ∂B
σ
h
i
Pjc · ∂ρ wj − wj · ∂ρ Pjc ρ=σ
dρ .
(3.31)
Here Bσ is a ball of radius σ, i.e |y| = σ. Upon using the far-field condition
(3.29a), we reduce (3.31) to
′
x1
Z
Since
2π
0
Z
∞
φ̂∗j V0′ cos2 θρ dρ dθ
′
Z
2π
Z
∞
φ̂∗j V0′ cos θ sin θρ dρ dθ
(3.32)
Z 2π 1
cos θ
α
~ j · eθ − σ~
αj · eθ − 2 cos θ σ dθ .
= lim
σ→∞ 0
σ
σ
R 2π
0
0
− x2
0
0
cos θ sin θ dθ = 0, we obtain
2α1
∂x1
= R∞
.
∗ ′
∂ς
0 φ̂j V0 ρ dρ
(3.33)
Similarly, the solvability condition for (3.27), subject to (3.29a), with respect
to the homogeneous adjoint solution Pjs , yields
2α2
∂x2
= R∞
.
∗ V ′ ρdρ
∂ς
φ̂
0
j
0
(3.34)
72
3.3. The Slow Dynamics of Spots
We summarize the result for the dynamics as follows:
Principal Result 3.3: Consider the 2-D GS model (1.7) for ε → 0 with
τ ≪ O(ε−2 ). Then, the slow dynamics of a collection (x1 , . . . , xk ) of spots
that are stable to spot profile instabilities are governed by the differentialalgebraic (DAE) system
k
X
dxj
Si ∇G(xj ; xi ) , j = 1, . . . , k ,
∼ −2πε2 γ(Sj ) Sj ∇R(xj ; xj ) +
dt
i=1, i6=j
(3.35)
R∞ ∗ ′
where γ(Sj ) ≡ −2/ 0 φ̂j V0 ρ dρ . Here the source strengths Sj , for j =
1, . . . , k, are determined in terms of the instantaneous spot locations and
the parameters A, D, and ν = −1/ ln ε by the nonlinear algebraic system
(3.8). In addition, V0 satisfies the core problem (3.2), and φ̂∗j is the radially
symmetric solution of the adjoint problem (3.30).
The ODE system (3.35) coupled to the nonlinear algebraic system (3.8)
comprises a DAE system for the time-dependent spot locations xj and source
strengths Sj for j = 1, . . . , k. These collective coordinates evolve slowly over
a long time-scale of order t = O(ε−2 ). The function γ(Sj ) in (3.35) was
previously computed numerically in Fig. 3 of [56], where it was shown that
γ(Sj ) is positive for a wide range of Sj . This plot is re-computed below in
Fig. 3.4(f). In Section §3.7, we will compare the dynamics (3.35) with full
numerical results for different patterns.
It is important to emphasize that the DAE system in Principal Result
3.3 for the slow spot evolution is only valid if each spot profile is stable
to any spot profile instability that occurs on a fast O(1) time-scale. Such
instabilities are the spot-splitting instability studied in Section §3.2 and the
competition and oscillatory profile instabilities studied later in Chapter 4.
The equilibrium or steady-state locations of a collection (x1 , . . . , xk ) of
spots satisfies dxj /dt = 0 for j = 1, . . . , k, where the dynamics was given as
in Principal Result 3.3. This leads to the following equilibrium result:
Principal Result 3.4: Consider the 2-D GS model (1.7) with given parameters A, D, ε. Then, the equilibrium spot locations xje and corresponding
equilibrium source strengths Sje for j = 1, . . . , k satisfy
Sj ∇Rjj +
k
X
i=1, i6=j
Si ∇Gij = 0 ,
j = 1, . . . , k ,
(3.36)
73
3.4. The Direction of Splitting
subject to the nonlinear algebraic system (3.8), which relates the source
strengths to the spot locations. In (3.36) we have labeled ∇ = (∂xj , ∂yj ).
In general it is intractable to determine analytically all possible equilibrium solution branches for k-spot patterns in an arbitrary 2-D domain as the
parameters A and D are varied. However, some partial results are obtained
in Section 3.7 for the special case of k spots equally spaced on a circular
ring that lies within and is concentric with a circular disk domain. For this
special case, the Green’s matrix is circulant, and the equilibrium problem is
reduced to determining the equilibrium ring radius for the pattern.
3.4
The Direction of Splitting
Next we determine the direction in which a spot splits, relative to the direction of its motion, if its source strength is slightly above the threshold value
Σ2 ≈ 4.31. When Sj = Σ2 , the eigenspace for λ = 0 is four-dimensional;
there are two eigenfunctions associated with the peanut-splitting mode m =
2, and there are two translation eigenfunctions associated with the mode
m = 1. For Sj − Σ2 = O(ε), we have λ = 0(ε). Therefore, we will expand
λ = ελ1 + · · · , and calculate both λ1 and its unstable eigenfunction, which
will determine the direction for which a spot will split. The calculation
below is similar to that in [56].
To analyze the direction of splitting, we must calculate a two-term expansion for the solution of the core problem in addition to its associated
eigenvalue problem near the j th spot. Throughout the calculation below,
we omit the index j if there is no confusion. We first introduce
U = U0 (ρ) + εU1 (y) + · · · , V = V0 (ρ) + εV1 (y) + · · · , ρ = |y| .
Then, as in the analysis of the slow dynamics in Section §3.3, the perturbation w = (V1 , U1 )t satisfies (3.27) with
x′j
= −γ(Sj )~
αj ,
α
~ j = 2π Sj ∇Rjj +
k
X
i=1, i6=j
Si ∇Gij .
Next, we introduce a complex constant g defined by g ≡ α1 − iα2 , so that
in (3.28) the vector f can be written as
Re(geiθ )V0′
f = γ(Sj )
,
0
74
3.4. The Direction of Splitting
where α
~ j = (α1 , α2 )t , and Re(A) is the real part of A. Then, w(y) can be
written in terms of a real-valued radially symmetric function ŵ(ρ) as
w(y) =
1 iθ
ge ŵ(ρ) + c.c.,
2
ŵ(ρ) = (V̂1 (ρ), Û1 (ρ))t ,
where c.c. denotes the complex conjugate, and ŵ(ρ) on 0 ≤ ρ < ∞ satisfies
′ V0
0
∆ρ ŵ + Mŵ = γ(Sj )
,
ŵ →
as ρ → ∞ . (3.37)
0
−ρ
For the eigenvalue problem (3.24), we expand
Φ = Φ̂0 (ρ) + εΦ1 (y) + · · · , N = N̂0 (ρ) + εN1 (y) + · · · , λ = ελ1 + · · · .
Upon substituting these expansions into (3.24), we obtain the leading order
approximation P0 = (Φ̂0 , N̂0 )t as before, and obtain an equation for the
next order terms P1 = (Φ1 , N1 )t . In this way, we get
∆ρ P0 + MP0 = 0 ,
(3.38a)
∆y P1 + MP1 = Λ1 P0 − M1 P0 − FP0 ,
(3.38b)
where M and M1 are defined by
2U1 V0 + 2U0 V1 2V0 V1
−1 + 2U0 V0 V02
.
, M1 =
M=
−U1 V0 − 2U0 V1 −2V0 V1
−2U0 V0
−V02
In addition, we have defined Λ1 and F by
′
xj · ∇ 0
λ1 0
Λ1 =
.
F=
0 0
0
0
Since x′j · ∇ = −γ(Sj )Re(geiθ )∂ρ , we can write M1 and F as
1
M1 = geiθ M̂1 + c.c. ,
2
1
F = − γ(Sj )(geiθ + c.c.)F̂ ,
2
F̂ =
∂ρ 0
0 0
,
where M̂1 is obtained by replacing V1 , U1 with the radially symmetric solution V̂1 , Û1 in every component of M1 . For the leading order equation
(3.38a), the solution consists of the eigenfunctions associated with the zero
eigenvalue, so that
P0 = AP̂01 (ρ)eiθ + B P̂02 (ρ)e2iθ + c.c.
75
3.4. The Direction of Splitting
For m = 1, the eigenfunctions are P̂01 = (V0′ , U0′ )t , and for m = 2 with
Sj ≈ Σ2 , the eigenfunctions P̂02 are plotted in Fig. 3.3(b). The corresponding homogeneous adjoint problem has four independent solutions, which we
write in complex form as
P∗11 ≡ P̂∗1 (ρ)eiθ + c.c. ,
P∗21 ≡ P̂∗2 (ρ)e2iθ + c.c. ,
P∗12 ≡ P̂∗1 (ρ) ieiθ + c.c. ,
P∗22 ≡ P̂∗2 (ρ) i e2iθ + c.c. ,
(3.39)
where P̂∗m (ρ) = (Φ̂∗m (ρ), N̂∗m (ρ))t for m = 1, 2 is the radially symmetric
solution on 0 < ρ < ∞ satisfying
(P̂∗m )ρρ +
m2
1 ∗
(P̂m )ρ − 2 P̂∗m + Mt P̂∗m = 0 ,
ρ
ρ
P̂∗m → 0 as ρ → ∞. (3.40)
Then, the four solvability conditions for (3.38b) give the four equations
Z
l, m = 1, 2 .
(3.41)
(P∗ml )t Λ1 − M1 − F P0 dy = 0 ,
R2
We introduce the integrals Jml , Iml , and Fml , defined by
Jml =
Z
R2
(P∗ml )t Λ1 P0 dy ,
Iml =
Z
R2
(P∗ml )t M1 P0 dy ,
Z
(P∗ml )t FP0 dy .
Fml =
R2
To calculate the integral I11 we write it as
1
=
2
Z
t P̂∗1 (ρ)eiθ + c.c.
geiθ M̂1 + c.c.
R2
AP̂01 (ρ)eiθ + B P̂02 (ρ)e2iθ + c.c. dy ,
Z ∞
Z
1 2π iθ
=
(P̂∗1 )t M̂1 P̂01 ρ dρ
(e + e−iθ )(geiθ + geiθ )(Aeiθ + Aeiθ ) dθ
2 0
0
Z ∞
Z
1 2π iθ
+
(P̂∗1 )t M̂1 P̂02 ρ dρ ,
(e + e−iθ )(geiθ + geiθ )(Be2iθ + Be2iθ ) dθ
2 0
0
R 2π ijθ
where ḡ is the complex conjugate of g. Since 0 e dθ = 0 for any integer
j 6= 0, only a constant integrand in the integral over θ gives a nonzero
contribution to I11 . The other integrals are calculated similarly. In this
I11
76
3.4. The Direction of Splitting
way, we obtain
I11 = 2πRe(gB̄)
Z
∞
0
Z
(P̂∗1 )t M̂1 P̂02 ρdρ ,
∞
(P̂∗1 )t M̂1 P̂02 ρ dρ ,
I12 = 2πRe(igB̄)
Z 0∞
(P̂∗2 )t M̂1 P̂01 ρ dρ ,
I21 = 2πRe(gA)
0
Z
∞
(P̂∗2 )t M̂1 P̂01 ρ dρ .
I22 = 2πRe(−igA)
0
In a similar way, we calculate
Z ∞
Φ̂∗1 Φ̂01 ρ dρ ,
J11 = 2πRe(A)λ1
Z 0∞
J21 = 2πRe(B)λ1
Φ̂∗2 Φ̂02 ρ dρ ,
J12 = 2πRe(iĀ)λ1
J22 = 2πRe(iB̄)λ1
0
∞
Z
Z0 ∞
0
Φ̂∗1 Φ̂01 ρ dρ ,
Φ̂∗2 Φ̂02 ρ dρ ,
and
F11 = 2πRe(gB̄)γ(Sj )
Z
∞
(P̂∗1 )t F̂ P̂02 ρ dρ ,
Z0 ∞
(P̂∗1 )t F̂ P̂02 ρ dρ ,
F12 = 2πRe(igB̄)γ(Sj )
0
Z ∞
(P̂∗2 )t F̂ P̂01 ρ dρ ,
F21 = 2πRe(gA)γ(Sj )
0
Z ∞
(P̂∗2 )t F̂ P̂01 ρ dρ .
F22 = 2πRe(−igA)γ(Sj )
0
Substituting these formulae into the solvability conditions (3.41), we obtain
λ1 Re(A)κ1 = Re(gB̄) ,
λ1 Re(iĀ)κ1 = Re(igB̄) ,
λ1 Re(B)κ2 = Re(gA) ,
λ2 Re(iB̄)κ2 = Re(−igA) ,
where the constants κ1 and κ2 are defined by
R∞ ∗
Φ̂1 Φ̂01 ρdρ
κ1 = R ∞ ∗ 0
,
t
0 (P̂1 ) [M̂1 − γ(Sj )F̂ ]P̂02 ρ dρ
R∞ ∗
Φ̂2 Φ̂02 ρdρ
κ2 = R ∞ ∗ 0
.
t
0 (P̂2 ) [M̂1 − γ(Sj )F̂ ]P̂01 ρ dρ
(3.42)
(3.43)
77
3.4. The Direction of Splitting
For Sj = 4.31, we calculate that γ(Sj ) ≈ 1.703. The solutions P̂∗m of the
adjoint problem (3.40) are plotted in Fig. 5 of [56]. Numerical values for the
constants κ1 and κ2 are also computed in §2.4 of [56] as κ1 = −0.926 and
κ2 = −1.800.
We define A = Ar + iAi , B = Br + iBi , and recall that g = α1 − iα2 .
Then, from (3.42) we obtain that
α2
α1
−
0
0
Ar
Ar
κ1
κ1
0
α1
α2
0
κ1
κ1 Ai = λ Ai .
(3.44)
α1
1
α2
0
0 Br
Br
κ2
κ2
Bi
Bi
0
− ακ2 ακ1 0
2
2
The eigenvalues λ1 of this problem are degenerate and satisfy
α1 α2
α2 α2
α1 α2
α2 + α22
α1 α1
2
+
−
.
±i
= 1
λ1 =
κ1 κ2
κ1 κ2
κ1 κ2
κ2 κ1
κ1 κ2
Since κ1 < 0 and κ2 < 0, the eigenvalues and eigenvectors are, respectively,
p
α2 + α22
λ±
Br
Ar
±
1 κ1
=
,
.
(3.45)
λ1 = ± √ 1
Bi
Ai
κ1 κ2
α1 ± iα2
The unstable eigenvalue is λ+
1 and its corresponding eigenvector is
p
r
r
α21 + α22
κ1 α1 − iα2
κ1 g
+
p
,
B=−
A.
λ1 = √
A=−
2
2
κ1 κ2
κ2 α1 + α2
κ2 |g|
Therefore, we conclude that the leading order eigenfunction P0 has the form
r
κ1
Re(ge2iθ )
P0 = 2A cos θ P̂01 + κ
κ=−
.
P̂02 ,
|g|
κ2
The first term corresponds to the direction of motion of the j th spot, which
is (α1 , α2 ), while the second term controls the direction of the splitting of
the spot. Since κ < 0 this splitting direction is orthogonal to the direction
of spot motion.
We remark that this analysis of the direction of spot-splitting is, largely, a
local analysis based on a linearization of the core problem and the eigenvalue
problem associated with the inner region. The only coupling to the other
spots is through the determination of the source strength Sj from (3.8) and
the vector α
~ j , defined in (3.29a), representing the “force” exerted by the
other spots and the domain geometry. As a consequence, we conclude that
for any spot that slightly exceeds the instability threshold condition Sj = Σ2
it will split in a direction orthogonal to the direction of its motion.
78
3.5. Two-Spot Patterns in an Infinite Domain
3.5
Two-Spot Patterns in an Infinite Domain
We first illustrate our asymptotic theory for the simple case of a two-spot
pattern in R2 when D = O(1). For this infinite plane, the reduced-wave
Green’s function and its regular part are readily available. Therefore, for this
infinite domain problem it is rather straightforward to explicitly determine
the spot dynamics and to characterize the self-replication instability.
Without loss of generality, we assume that the centers of the two spots
are at x1 = (α, 0) and x2 = (−α, 0) where α > 0 and α ≫ O(ε). In addition,
by a coordinate re-scaling it is readily shown that we can set D = 1 without
loss of generality. The reduced-wave Green’s function for the infinite plane
satisfies ∆G − G = −δ(x − xj ), with G → 0 as |x| → ∞. The solution is
simply
1
K0 (|x − xj |) ,
G(x; xj ) =
2π
where K0 (r) is the modified Bessel function of the second kind of order zero.
The asymptotic behavior of K0 (r) as r → 0 is K0 (r) ∼ −(ln r − ln 2 + γe ),
where γe ≈ 0.5772 is Euler’s constant. Therefore, the entries of the Green’s
matrix, consisting of G12 ≡ G(x1 ; x2 ) and its regular part Rjj = R(xj ; xj ),
are simply
G12 = G21 =
1
K0 (2α) ,
2π
R11 = R22 =
1
(ln 2 − γe ) .
2π
Thus, the Green’s matrix G in (3.12) is a symmetric circulant matrix. Consequently, it follows from (3.14) of Section 3.1, that there is a common
source strength Sc = S1 = S2 , which satisfies the scalar nonlinear algebraic
equation
A = Sc [1 + ν(ln 2 − γe ) + νK0 (2α)] + ν χ(Sc ) ,
ν = −1/ ln ε . (3.46)
From this equation, we now numerically determine the relationship between
Sc , the half-distance α between the two spots on the x-axis, and the feed-rate
parameter A.
Experiment 3.2: Two spots in the infinite plane
We fix ε = 0.02 in the computational results below. In Fig. 3.4(a) we
plot A versus Sc for three different values of α. From this plot we observe
that the graph of A versus Sc has a fold point Af , which depends on α.
This fold point Af (α) is shown in Fig. 3.4(b) by the dotted curve. The
solid curve in Fig. 3.4(b) is the corresponding two-term asymptotic result
for Af obtained by expanding (3.46) in powers of ν. This result shows that a
79
3.5. Two-Spot Patterns in an Infinite Domain
quasi-equilibrium two-spot pattern exists for a spot separation 2α only when
the feed-rate parameter A is larger than the existence threshold Af (α), i.e.
A > Af (α).
Next, we discuss the possibility of self-replicating instabilities for an
inter-spot separation of 2α. In Fig. 3.4(c), we plot Sc vs. α for A = 3.5
(solid curve), A = 4.0 (dashed curve) and A = 4.5 (heavy solid curve).
Notice that for a fixed A > Af , there could be two solutions of Sc for a
given α. As such, we only plot the large solution branch for Sc in this
figure. This figure shows that for a fixed distance 2α between the spots, the
source strength Sc is an increasing function of the feed-rate A. In addition,
for a fixed feed-rate A, the source strength Sc increases as α increases. For
the solid curve in Fig. 3.4(c) with A = 3.5, the source strength Sc is always
below the spot-replication threshold Σ2 , so that the spots never split for
any inter-separation distance. Alternatively, the dashed curve for A = 4.0
and the heavy solid curve for A = 4.5 in Fig. 3.4(c) intersect the spot selfreplication threshold Sc = Σ2 at α ≈ 1.81 and α ≈ 0.46, respectively. This
threshold initiates a spot-replication event.
In Fig. 3.4(d), we plot A vs. α corresponding to the different spotdeformation thresholds Sc = Σ2 ≈ 4.31 (solid curve), Sc = Σ3 ≈ 5.44
(dashed curve) and Sc = Σ4 ≈ 6.14 (heavy solid curve). For the solid curve
in this figure, which corresponds to Sc = Σ2 , we observe that A decreases
with α but asymptotes to its minimum value As = 3.98 as α → ∞. This
minimum value is obtained by setting Sc = Σ2 and K0 (2α) → 0 in (3.46).
We conclude that for any A > As , a two-spot pattern in an infinite domain
will be linearly unstable to a peanut-splitting instability if the inter-spot
separation distance 2α is taken to be sufficiently large.
Next we derive the ODE system that determines the slow dynamics of
the two-spot pattern when Sc < Σ2 . A simple application of the general
result in Principal Result 3.3 shows that
αc ≡
dα
= −4ε2 γ(Sc )Sc K0′ (2α) ,
dς
γ(Sc ) ≡ R ∞
0
−2
,
φ∗ V0′ ρ dρ,
ς = ε2 t .
(3.47)
Since K0′ (r) < 0 for any r > 0 and |K0′ (r)| a decreasing function of r, it
follows that the two spots repel each other along the x-axis for all time
and that their common speed αc = | dα
dς | is a decreasing function of interseparation distance 2α. This is shown in Fig. 3.4(e) for three different values
of A. In Fig. 3.4(f) we plot the curve γ(Sc ) versus Sc used in the numerical
computation of the ODE (3.47).
Since the two spots are repelling and Sc is a monotonically increasing
80
3.5. Two-Spot Patterns in an Infinite Domain
4
9
8
3.5
f
6
A
A
7
5
3
4
2.5
3
2
0
1
2
3
4
5
6
7
2
8
Sc
0
0.5
(a) A vs. Sc
1
1.5
α
2
(b) Af vs. α
8
5.5
5
7
4
A
Sc
4.5
6
3.5
5
3
2.5
4
2
0.5
1
1.5
2
2.5
α
3
3.5
4
4.5
5
0.5
(c) Sc vs. α
1
1.5
α
2
2.5
3
5
6
(d) A vs. α
8
60
6
40
γ
α
c
50
30
20
4
2
10
0
0.5
1
1.5
α
2
(e) αc vs. α
2.5
3
0
0
1
2
3
4
S
(f) γ vs. S
Figure 3.4: Experiment 3.2: Two spots at (±α, 0) in the infinite plane, with
ε = 0.02. (a) A vs. Sc for α = 0.1 (solid curve), α = 0.5 (dashed curve)
and α = 1.0 (heavy solid curve). (b) The fold point Af vs. α; two-term
asymptotic result (solid curve), and numerical result from (3.46) (dotted
curve). (c) Sc vs. α for A = 3.5 (solid curve), A = 4.0 (dashed curve)
and A = 4.5 (heavy solid curve). (d) A vs. α with Sc = Σ2 (solid curve),
Sc = Σ3 (dashed curve) and Sc = Σ4 (heavy solid curve). (e) αc vs. α for
A = 3.5 (solid curve), A = 4.0 (dashed curve) and A = 4.5 (heavy solid
curve). (f ) γ vs. S defined in the ODE (3.47) .
81
3.6. The Reduced-Wave and Neumann Green’s Functions
function of α it follows that a dynamically triggered spot-replicating instability will occur when A > As ≈ 3.98. In particular, suppose that A = 4.0.
Then, the graph of Sc versus α is shown by the dashed curve in Fig. 3.4(c).
This curve shows that Sc > Σ2 if and only if α ≥ 1.81. Now consider
an initial two-spot quasi-equilibrium solution with α = 1 at t = 0. For
this initial value of α, A exceeds the existence threshold Af of Fig. 3.4(b).
Then, since the ODE (3.47) predicts that α → ∞ as t → ∞, it follows that
α = 1.81 at some sufficiently long time t = O(ε−2 ), which initiates the spot
self-replication instability. Based on the theory in Section 3.2, the spots
should split in a direction perpendicular to the x-axis. In summary, two
spots on the infinite plane can readily undergo dynamically triggered spot
self-replication events that are induced by their collective motion.
3.6
The Reduced-Wave and Neumann Green’s
Functions
In order to implement the asymptotic theory in the previous sections we require some detailed analytical results for the reduced-wave Green’s function
for a given domain. In addition, for D = O(ν −1 ) ≫ 1, this Green’s function
can be approximated by the Neumann Green’s function G(N ) , as was discussed in Section 3.1. In this section we give analytical formulae for both
the reduced-wave and Neumann Green’s functions for the unit disk and the
rectangle for a given source point at x0 .
3.6.1
Green’s Function for a Unit Disk
Let Ω be the unit disk Ω = {x : |x| ≤ 1}. Introducing polar coordinates,
(x0 , y0 ) = (ρ0 cos θ0 , ρ0 sin θ0 ), the reduced-wave Green’s function satisfies
Gρρ +
1
1
1
1
Gρ + 2 Gθθ − G = − δ(ρ − ρ0 )δ(θ − θ0 ) ,
ρ
ρ
D
ρ
in Ω ,
(3.48)
with boundary conditions G(ρ, θ + 2π) = G(ρ, θ) and Gρ (1, θ) = 0.
To determine G we extract the θ dependence in a complex Fourier series
by introducing
∞
1 X
G̃n (ρ, ρ0 ; θ0 )e−inθ ,
G(ρ, ρ0 ; θ, θ0 ) =
2π n=−∞
so that
G̃n (ρ, ρ0 ; θ0 ) =
Z
2π
(3.49)
einθ G(ρ, ρ0 ; θ, θ0 ) dθ .
0
82
3.6. The Reduced-Wave and Neumann Green’s Functions
In the usual way, we derive from (3.48) that
G̃nρρ +
n2
1
δ(ρ − ρ0 ) inθ0
1
G̃nρ − 2 G̃nθθ − G̃n = −
e
,
ρ
ρ
D
ρ
0 < ρ < 1,
with boundary conditions
G̃nρ (1, ρ0 ; θ0 ) = 0 ,
G̃n (0, ρ0 ; θ0 ) < ∞ .
The solution to this problem is given by
√ρ
,
0 < ρ < ρ0 ,
A
I
1
n
D
"
#
“
”
′
G̃n =
In √1
ρ
ρ
D
”
“
A2 In √D − Kn′ √1 Kn √D ,
ρ0 < ρ < 1 ,
(3.50)
D
where In (r) and Kn (r) are modified Bessel functions of the second kind of
order n. In (3.50), the coefficients A1 and A2 are obtained by making G̃n
continuous at ρ0 and by requiring that the jump in the derivative of G̃n at
inθ
ρ0 is [G̃nρ ]ρ0 = − e ρ0 0 . Upon using the Wronskian determinant
Kn
ρ
√0
D
In′
ρ
√0
D
−
Kn′
ρ
√0
D
In
ρ
√0
D
=
√
D
,
ρ0
we calculate A1 and A2 as
Kn′ √1D
ρ
ρ
In √ 0 − Kn √ 0 ,
A1 = −einθ0 1
′
D
D
In √D
K ′ √1
n
ρ0
inθ0
D .
A2 = −e
In √
D
In′ √1
D
Upon substituting these expressions into (3.50), we obtain
"
#
K ′ “ √1 ”
n
ρ0
ρ0
inθ0 I
“ D” In √
√
√ρ
K
−
,
e
n
n
′
D
D
D
√1
In
D
#
"
G̃n =
K ′ “ √1 ”
n
ρ
ρ0
ρ
D
inθ0 I
”
“
√
√
√
I
−
,
e
K
n
n
n
′
D
D
D
√1
In
0 < ρ < ρ0
ρ0 < ρ < 1.
D
(3.51)
83
3.6. The Reduced-Wave and Neumann Green’s Functions
Therefore, the Fourier expansion for the reduced-wave Green’s function for
(3.48) is
∞
1 X −in(θ−θ0 )
e
Fn (ρ) ,
0 < ρ < ρ0 ,
2π n=−∞
K ′ √1
n
ρ0
ρ0
ρ
D
Fn (ρ) ≡ Kn √
In √
In √
−
.
D
D
D
In′ √1
G(ρ, ρ0 ; θ, θ0 ) =
(3.52a)
(3.52b)
D
Alternatively, for the range ρ0 < ρ < 1 we can simply interchange ρ and
ρ0 in (3.52). Next, we identify the free-space Green’s function Gf , which is
given by
∞
ρ0
ρ
1 X −in(θ−θ0 )
e
Kn √
In √
, 0 < ρ < ρ0 .
Gf (ρ, ρ0 ; θ, θ0 ) =
2π n=−∞
D
D
(3.53)
For the range ρ0 < ρ < ∞ we interchange ρ and ρ0 in the formula above.
Then, by the well-known addition formula
∞
X
ρ0
R
ρ
−in(θ−θ0 )
e
Kn √
K0 √
=
In √
,
(3.54)
D
D
D
n=−∞
p
ρ2 + ρ20 − 2ρρ0 cos(θ − θ0 ), we can decompose (3.52) as
′
∞
√1
K
X
n
1
R
ρ0
1
ρ
D
−in(θ−θ0 )
In √
G=
e
K0 √
−
In √
.
2π
2π n=−∞
D
D
D
In′ √1
with R =
D
(3.55)
In (3.55), the first term arises from the source at (ρ0 , θ0 ), while the Fourier
series term represents the effects of the boundary conditions. Since n is an
integer, we can use K−n (z) = Kn (z) and I−n (z) = In (z), to further simplify
(3.55) to
′
√1
K
0
R
1
ρ
ρ0
1
D
√
√
√
K0
−
I0
+ δM
I0
G=
2π
2π I ′ √1
D
D
D
0
D
1
′
M
√
K
n
1X
ρ
ρ0
D
In √
cos(n(θ − θ0 )) −
In √
. (3.56)
π
D
D
In′ √1D
n=1
84
3.6. The Reduced-Wave and Neumann Green’s Functions
Since Kn′ √1D < 0, and In′ √1D > 0 for any integer n ≥ 0, then δM is a
small error term bounded by PM , where
∞
Kn′ √1D
X
ρ
ρ
In √ 0 In √
|δM | ≤ PM ≡ −
.
1
′
D
D
√
I
n=M +1 n
D
The expression (3.56) for G is the one used in the numerical simulations in
Section 3.7. From (3.56) we can readily extract the regular part R of the
reduced-wave Green’s function. The gradients of R and G that are needed
in Principal Result 3.3 to determine the motion of a collection of spots is
determined numerically from (3.56).
In Table 3.1, we give the number M of Fourier terms in (3.56) that are
required in order to calculate the Green’s function within a tolerance of
10−8 . The series for PM is found to converge fairly fast, especially when the
spots are not close to the boundary of the unit circle and D is not too large.
ρ0
0.8
0.8
0.8
0.5
ρ
0.8
0.5
0.2
0.5
M
31
16
8
11
PM
8.1737e-009
6.7405e-009
9.5562e-009
4.3285e-009
Table 3.1: The number of Fourier terms needed to determine the reducedwave Green’s function within a tolerance 10−8 for D = 1.
3.6.2
Neumann Green’s Function for a Unit Disk
Next for D = O(ν −1 ) ≫ O(1), we recall from (3.15) that the reduced-wave
Green’s function and its regular part can be approximated by the Neumann Green’s function G(N ) (x; x0 ) and its regular part R(N ) (x; x0 ) satisfying (3.16). From equation (4.3) of [51], this Neumann Green’s function and
its regular part for the unit disk are given in terms of Cartesian coordinates
85
3.6. The Reduced-Wave and Neumann Green’s Functions
by
(N )
G
1
=
2π
1
3
x0 2
2
+ (|x| + |x0 | ) −
− ln |x − x0 | − ln x|x0 | −
,
|x0 | 2
4
(3.57)
3
x0 1
+ |x0 |2 −
− ln x0 |x0 | −
.
(3.58)
R(N ) =
2π
|x0 |
4
The gradients of these quantities can be obtained by a simple calculation as
|x0 |2
x − x0
1
(N )
−x ,
+
−
∇G (x; x0 ) = −
2π
|x − x0 |2 x̄|x0 |2 − x̄0
1
2 − |x0 |2
(N )
∇R (x0 ; x0 ) =
x0 .
2π 1 − |x0 |2
These results allow us to explicitly determine the dynamics of a collection
of spots when D is large, as described in Principal Result 3.3.
3.6.3
Green’s Function for a Rectangle
Next, we calculate the reduced-wave Green’s function G(x, y; x0 , y0 ) in the
rectangular domain Ω = [0, L] × [0, d]. The free-space Green’s function Gf
is given by
|x − x0 |
1
√
K0
.
Gf =
2π
D
Therefore, using the method of images, we can write the Green’s function
satisfying (3.6) as
!
4
∞
∞
(l)
|x − xmn |
1 X X X
√
K0
G(x; x0 ) =
,
(3.59)
2π n=−∞ m=−∞
D
l=1
where
x(1)
mn = (x0 + 2nL, y0 + 2md) ,
x(3)
mn = (x0 + 2nL, −y0 + 2md) ,
x(2)
mn = (−x0 + 2nL, y0 + 2md) ,
x(4)
mn = (−x0 + 2nL, −y0 + 2md) .
The modified Bessel function K0 (r) decays exponentially as r → ∞. For
example when r > 22, then K0 (r) < 7.5×10−11 . Therefore, provided that D
is not too large, the infinite series in (3.59) converges fairly fast. The regular
part of the reduced-wave Green’s function together with the gradients of G
and R, as required in Principal Result 3.3, are readily evaluated numerically
from (3.59).
86
3.7. Comparison of Theory with Numerical Experiments
3.6.4
Neumann Green’s Function for a Rectangle
If D = O(ν −1 ) is large, we can approximate the reduced-wave Green’s function and its regular part by the corresponding Neumann Green’s function
G(N ) and its regular part R(N ) , as given by the expansion in (3.15). This
latter Green’s function was given analytically in formula (4.13) of [56] as
G(N ) (x; x0 ) = −
1
ln |x − x0 | + R(N ) (x; x0 ) ,
2π
where R(N ) (x; x0 ) is given explicitly by
∞
1 X
ln(|1 − q n z+,+ ||1 − q n z+,− ||1 − q n z−,+ ||1 − q n ζ+,+ |
R (x; x0 ) = −
2π n=0
x
1 x20 + x2
L 1
n
n
n
−
+
|1 − q ζ+,− ||1 − q ζ−,+ ||1 − q ζ−,− |) +
d 3
L
2
L2
∞
1
|1 − z−,− |
1 X
−
ln |1 − q n z−,− | . (3.60)
ln
−
2π
|r−,− |
2π
(N )
n=1
Here points in the rectangle are written as complex coordinates. In (3.60),
q ≡ e−2Lπ/d , while z±,± and ζ±,± are given by
z+,± ≡ exp(µ(−|x + x0 | + i(y ± y0 ))/2) ,
z−,± ≡ exp(µ(−|x − x0 | + i(y ± y0 ))/2) ,
ζ+,± ≡ exp(µ(|x + x0 | − 2L + i(y ± y0 ))/2) ,
ζ−,± ≡ exp(µ(|x − x0 | − 2L + i(y ± y0 ))/2) ,
where µ is defined by µ = 2π/d.
3.7
Comparison of Asymptotic Results and Full
Numerical Results
In this section we compare our asymptotic results for spot dynamics, the spot
self-replication threshold, and the equilibrium positions of spot patterns with
full numerical simulations of (1.7). The comparisons are made for the unit
disk and square, since for these two specific domains the required Green’s
functions are analytically known as given in the previous section.
In all of the numerical simulations below we have set ε = 0.02 so that ν =
−1/ ln ε = 0.2556. In each numerical experiment, we first fix the parameters
87
3.7. Comparison of Theory with Numerical Experiments
A and D. Then, for an initial configuration of spot locations (x1 , . . . , xk ),
we compute the source strengths (S1 , . . . , Sk ) from the nonlinear algebraic
system (3.8). The initial condition for the full numerical simulations is
taken to be the quasi-equilibrium solution (3.9) with the values for Vj (0) as
plotted in Fig. 3.1(b), corresponding to the computed values of Sj . Since
this initial condition provides a decent, but not sufficiently precise, initial
k−spot pattern, we only begin to track the spot locations from the full
numerical simulations after the completion of a short transient period. To
numerically identify the locations of the spots at any time, we determine all
local maxima of the computed solution v by identifying the maximal grid
values. This simple procedure is done since it is expensive to interpolate
the grid values to obtain more accurate spot locations every time step. In
this way, the trajectories of the spots are obtained from the full numerical
results, and are then compared with the asymptotic dynamics of the spots
as predicted by Principal Result 3.3.
3.7.1
The Unit Square
In this subsection, we consider the unit square domain Ω = [0, 1] × [0, 1].
The numerical simulations in this domain are done by solving (1.7) using
the PDE solver VLUGR (cf. [7]), with a minimum step size 0.005. In each
of the experiments below, we plot the contour map of the numerical solution
v in a gray-scale form. The bright (white) regions correspond to the spot
regions where v has a large amplitude, while the dark region is where v is
asymptotically zero.
Experiment 3.3: A three-spot pattern: Slowly drifting spots
Let A = 20 and D = 1, and consider an initial three-spot pattern with
spots equally spaced on a ring of radius r = 0.2 centered at (0.5, 0.5). The
initial coordinates for the spots locations are at xj , yj , as given in Table 3.2.
For this pattern, the Green’s matrix G is not strictly circulant, but from
(3.12) we compute that all three spots share a common source strength Sc ≈
3.71. Since Sc < Σ2 , we predict that there is no spot self-replication initiated
at t = 0. In Fig. 3.5 we plot v at t = 1, 21, 106, 581, where we observe that
all three spots drift outwards, and approach equilibrium locations xjn , yjn
for j = 1, . . . , 3 after a sufficiently long time. During this evolution, the
source strengths never exceed the threshold Σ2 , and so there is no triggered
dynamical spot-replication instability.
In Fig. 3.6 the solid curves are the spot trajectories obtained from the
asymptotic result of Principal Result 3.3. The green, blue, and red curves, in
88
3.7. Comparison of Theory with Numerical Experiments
this figure correspond, respectively, to the 1st , 2nd , and 3rd spots. Since the
initial locations of the 1st and 2nd spots are exactly symmetric, it follows
that G13 = G23 , R11 = R22 , and G12 = G21 in the Green’s matrix. Therefore, from Principal Result 3.3, these two spots move at the same speed
and their trajectories in the x−direction exactly overlap, as plotted by the
green curve in Fig. 3.6(a). The spot locations as predicted from the full
numerical solution are indicated by circles in Fig. 3.6. We observe that the
asymptotic and numerical results for the spot dynamics agree very closely,
which confirms that the asymptotic result in Principal Result 3.3 closely
predicts the slow evolution of spots when there is no spot self-replication.
In addition, from the asymptotic result in Principal Result 3.4, we calculate the equilibrium location xje , yje and the equilibrium source strength Sje
for j = 1, . . . , 3. These values are given in Table 3.2, and our equilibrium
result is found to closely predict the final equilibrium state xjn , yjn , Sjn
obtained by numerically computing solutions to the full system (1.7) for a
sufficiently long time.
j
1
2
3
xj
0.40
0.40
0.70
yj
0.67
0.33
0.50
Sj
3.71
3.71
3.71
Vj (0)
34.2
34.2
34.2
xjn
0.33
0.33
0.79
yjn
0.77
0.23
0.50
Sjn
3.68
3.68
3.95
xje
0.33
0.33
0.79
yje
0.77
0.23
0.50
Sje
3.68
3.68
3.95
Table 3.2: Data for Experiment 3.3: The columns of xj , yj , Sj and Vj (0)
correspond to the initial condition. The remaining data is with regards to
the asymptotic and numerical results for the equilibrium state.
Figure 3.5: Experiment 3.3: Fix A = 20 and D = 1, and consider a threespot initial pattern with spots equally spaced on a ring of radius r = 0.2
centered at (0.5, 0.5). The initial common source strength is Sc = 3.71, as
given in Table. 3.2. The numerical solution v is shown at t = 1, 21, 106, 581,
and all spots drift slowly outwards.
89
3.7. Comparison of Theory with Numerical Experiments
1
0.8
0.8
0.6
0.6
y
j
xj
1
0.4
0.4
0.2
0.2
0
100
200
300
t
(a) xj vs. t
400
500
0
100
200
300
400
500
t
(b) yj vs. t
Figure 3.6: Experiment 3.3: Fix A = 20 and D = 1. We compare the
dynamics of a 3−spot pattern (solid curves) with full numerical results (discrete markers) starting from t = 10. (a) xj vs. t; (b) yj vs. t.
Experiment 3.4:
splitting
A three-spot pattern: Spot-splitting and dynamics after
We fix A = 20 and D = 1, and consider an initial three-spot pattern on
a ring of radius r = 0.3 centered at (0.4, 0.4). Note that this experiment
has the same parameters as in the previous experiment, except now the
initial spot configuration is different. The initial data are given on the left
side of Table 3.3. Since the source strength for the 3rd spot now exceeds
the spot-splitting threshold, i.e. S3 > Σ2 , the asymptotic theory predicts
that the 3rd spot will undergo splitting beginning at t = 0. In Fig. 3.7, we
plot the numerical solution v at t = 1, 10, 31, 46, 61, 91, 121, 421. From this
figure we observe that the 3rd spot (the brightest one at t = 1) deforms
into a peanut shape at t = 31, and then splits into two spots at t = 46 in a
direction perpendicular to its motion. Subsequently, the four spots interact
and slowly drift to a symmetric four-spot equilibrium state when t = 421.
After the splitting event, we use the new 4−spot pattern xjt , yjt for
j = 1, . . . , 4 at t = 61, as given in Table 3.3, as the initial conditions for the
asymptotic ODE’s in Principal Result 3.3. At t = 61, the source strengths
S1t , · · · , S4t are below the splitting threshold, and so there is no further spotsplitting at this time. In Fig. 3.8, the subsequent asymptotic trajectories of
the spots for t ≥ 61 are shown by the solid curves. The x−coordinates of
the 1st and 2nd spots, as well as the 3rd and 4th spots, essentially overlap
in Fig. 3.8(b), as a result of their almost symmetric locations. The discrete
90
3.7. Comparison of Theory with Numerical Experiments
markers on the spot trajectory curves in Fig. 3.8 are the full numerical results
as computed from the GS model (1.7). From this figure, we observe that
there is a very close agreement between the asymptotic and full numerical
results for the dynamics. Thus, Principal Result 3.3 can also be used to
predict the motion of a collection of spots after a spot self-replication event.
From Principal Result 3.4, we calculate the asymptotic result for the
symmetric equilibrium locations xje , yje and the equilibrium source strengths
Sje , for j = 1, . . . , 4. These results are given in Table. 3.3, and compare almost exactly with the results from the full numerical simulations at t = 421
(not shown).
j
1
2
3
4
xj
0.25
0.25
0.70
-
yj
0.66
0.14
0.40
-
Sj
4.05
2.37
4.79
-
Vj (0)
32.54
35.48
27.65
-
xjt
0.30
0.28
0.76
0.77
yjt
0.75
0.20
0.36
0.59
Sjt
3.44
3.01
2.40
2.55
xje
0.25
0.25
0.75
0.75
yje
0.75
0.25
0.25
0.75
Sje
2.87
2.87
2.87
2.87
Table 3.3: Data for Experiment 3.4: The columns of xj , yj , Sj and Vj (0)
correspond to the initial condition. The data xjt , yjt, and Sjt correspond to
the initial conditions used for the asymptotic dynamics at t = 61 after the
spot-splitting event. The final columns are the equilibrium results for the
4-spot pattern obtained from the asymptotic theory.
Experiment 3.5: An asymmetric four-spot pattern
We fix A = 30 and D = 1, and consider an initial 4−spot pattern with
equally spaced spots on a ring of radius 0.2 centered at (0.6, 0.6). The initial
spot locations xj , yj for j = 1, . . . , 4 and initial source strengths are given
on the left side of Table 3.4. For this case, the two source strengths S3 and
S4 satisfy S3 > Σ2 and S4 > Σ2 , so that our asymptotic theory predicts
that the 3rd and 4th spots undergo spot-splitting events starting at t = 0.
The full numerical results for this pattern are given in Fig. 3.9, where we
observe that the 3rd and 4th spots split in a direction perpendicular to
their motion. The resulting 6−spot pattern, with initial locations xjt , yjt
for j = 1, . . . , 6 at t = 21, as given in Table 3.4, are used as initial conditions
for the asymptotic ODE’s in Principal Result 3.3. These six spots evolve
outwards as t increases and eventually approach their equilibrium states
xje , yje , and Sje , for j = 1, . . . , 6, as given in Table 3.4, when t = 581.
The asymptotic result obtained from Principal Result 3.4 for the 6−spot
equilibrium state is found to compare very favorably with the full numerical
91
3.7. Comparison of Theory with Numerical Experiments
Figure 3.7: Experiment 3.4: Fix A = 20 and D = 1, and consider a threespot initial pattern with spots equally spaced on a ring of radius r = 0.3
centered at (0.4, 0.4). The initial source strengths Sj for j = 1, . . . , 3 are
given in Table. 3.3, for which S3 > Σ2 . We plot the full numerical solution
v as time evolves, and observe that the 3rd spot undergoes self-replication.
Subsequently, all four spots drift slowly towards a symmetric equilibrium
4−spot pattern.
0.8
1
0.7
0.8
0.6
yj
xj
0.6
0.5
0.4
0.4
0.2
0.3
0.2
50
100
150
200
250
300
t
(a) xj vs. t
350
400
450
0
50
100
150
200
250
300
350
400
450
t
(b) yj vs. t
Figure 3.8: Experiment 3.4: Fix A = 20 and D = 1. Starting from t =
61 after the spot-replication event, we compare the dynamics of the 4−spot
pattern from asymptotic analysis (solid curves) with full numerical results
(discrete markers). (a) xj vs. t; (b) yj vs. t.
92
3.7. Comparison of Theory with Numerical Experiments
results at t = 581. We remark that this parameter set corresponds to the
numerical experiment given in Chapter 1 in Fig. 1.4.
A very favorable comparison of analytical (solid curves) and full numerical results (discrete markers) for the spot locations after t = 21 is shown in
Fig. 3.10. This agreement further validates our main asymptotic result in
Principal Result 3.3.
j
1
2
3
4
5
6
xj
0.80
0.60
0.40
0.60
-
yj
0.60
0.80
0.60
0.40
-
Sj
2.82
2.82
5.69
5.69
-
Vj
36.21
36.21
19.07
19.07
-
xjt
0.84
0.58
0.25
0.26
0.49
0.66
yjt
0.58
0.84
0.49
0.66
0.25
0.26
Sjt
3.13
3.13
2.93
2.73
2.93
2.73
xje
0.83
0.61
0.17
0.21
0.39
0.79
yje
0.61
0.83
0.39
0.79
0.17
0.21
Sje
2.91
2.91
2.91
3.07
2.91
3.07
Table 3.4: Data for Experiment 3.5: The columns of xj , yj , Sj and Vj (0)
correspond to the initial condition. The data xjt , yjt, and Sjt correspond to
the initial conditions used for the asymptotic dynamics at t = 21 after the
two spot-splitting events. The final columns are the equilibrium results for
the 6-spot pattern.
3.7.2
The Unit Disk
In this subsection we compare results from our asymptotic theory for spot
patterns in the unit disk Ω = {x : |x| ≤ 1}, with corresponding full numerical results. For the unit disk, numerical solutions to the GS model (1.7) are
computed by using the finite element code developed by W. Sun in [50].
We first consider the special case when k spots are equally distributed
on a ring of radius r centered at the origin of the unit disk. The centers of
the spots are at
xj = re2πij/k , j = 1, 2, · · · , k,
√
where i = −1. For this symmetric arrangement of spots, the Green’s
matrix in (3.12) is circulant and is a function of the ring radius r. Hence,
it follows that Ge =P
θe with
e = (1, . . . , 1)t , where θ = pk (r)/k and pk (r) is
P
defined by pk (r) ≡ ki=1 kj=1 Gij . Since the Green’s matrix G is circulant,
the source strengths Sj for j = 1, . . . , k have a common value Sc . From
(3.14) of Section §3.1, it follows that the source strength Sc satisfies the
93
3.7. Comparison of Theory with Numerical Experiments
Figure 3.9: Experiment 3.5: Fix A = 30 and D = 1, and consider a four-spot
initial pattern with spots equally spaced on a ring of radius r = 0.2 centered
at (0.6, 0.6). The initial source strengths Sj for j = 1, . . . , 4 are given in
Table 3.4, for which S3 > Σ2 and S4 > Σ2 . We plot the full numerical
solution v as time evolves, and observe that the 3rd and 4th spots undergo
self-replication. Subsequently, all six spots move towards a symmetric 6−spot
equilibrium pattern.
1
0.8
0.8
0.6
0.6
y
xj
j
1
0.4
0.4
0.2
0.2
0
100
200
300
400
t
(a) xj vs. t
500
600
0
100
200
300
400
500
600
t
(b) yj vs. t
Figure 3.10: Experiment 3.5: Fix A = 30 and D = 1. Starting from t = 21
after the two spot-replication events, we compare the asymptotic dynamics
of the 6−spot (solid curves) with full numerical results (discrete markers).
(a) xj vs. t; (b) yj vs. t.
94
3.7. Comparison of Theory with Numerical Experiments
scalar nonlinear algebraic equation
2πν
pk (r) + νχ(Sc ) .
A = Sc 1 +
k
(3.61)
To determine the dynamics of the k spots, we calculate α
~ in (3.29b) as
α
~ j = 2π
Sc
∇F (x1 , . . . , xk ) ,
k
∇F (x1 , · · · , xk ) = p′k (r) e2πij/k .
Then, the dynamics (3.35) of Principal Result 3.3 is reduced to an ODE for
the ring radius r(t), given by
dr
2πε2
=−
γ(Sc )Sc p′k (r) .
dt
k
(3.62)
Therefore, we predict that the k spots remain equally distributed on a slowly
evolving ring.
P P
The function pk (r) ≡ ki=1 kj=1 Gij cannot be calculated analytically
when G is the reduced-wave Green’s function. Instead, we calculate it numerically from the explicit form for G given in (3.56). However, for D ≫ 1,
we can analytically calculate a two-term expansion for pk (r) in terms of D
by using the two-term expansion (3.15) for the reduced-wave Green’s function in terms of the Neumann Green’s function, together with the simple
explicit form for the Neumann Green’s function in (3.58). We obtain for
P P
(N )
D ≫ 1 that pk (r) ∼ k2 D/|Ω| + ki=1 kj=1 Gij , where the double sum here
was calculated in Proposition 4.3 of [51]. In this way, for D ≫ 1, we obtain
that
k2 D
1
3 2
k−1
2k
2 2
pk (r) ∼
+
−k ln(kr ) − k ln(1 − r ) + r k − k . (3.63)
π
2π
4
′
For D ≫ 1, the equilibrium ring radius re satisfies pk (r) = 0, which yields
the transcendental equation
k−1
r 2k
− r2 =
.
2k
1 − r 2k
It is readily shown that there is only one root re to this equation for any k ≥ 2
in the interval r ∈ (0, 1). Hence, for D ≫ 1, there is unique equilibrium ring
radius for k spots uniformly distributed on a ring. It is also readily shown
′′
from (3.63) that pk (re ) > 0. Hence, for D ≫ 1, pk (r) has a minimum at the
equilibrium radius re , so that re is a stable equilibrium point for the ODE
95
3.7. Comparison of Theory with Numerical Experiments
(3.62) when D ≫ 1. From (3.61), this condition also implies that Sc (r) has
a maximum value at r = re when D ≫ 1.
In Fig. 3.11(a), we fix D = 3.912 and plot the source strength Sc as a
function of the ring radius r with k = 3, A = 30 (dotted curve), k = 4, A =
40 (solid curve) and k = 5, A = 48 (heavy solid curve). For these three
patterns, the equilibrium states are respectively (re1 , Sce1 ) = (0.55, 4.57),
(re2 , Sce2 ) = (0.60, 4.70), and (re3 , Sce3 ) = (0.63, 4.58), which are marked
by the solid circles in this figure. The square markers correspond to the
spot-replicating threshold Σ2 ≈ 4.31, which occurs at rs1 = 0.17, rs2 = 0.14,
and rs3 = 0.22, respectively. Any portion of these curves above the square
markers correspond to ring radii where simultaneous spot self-replication is
predicted to occur.
5
4.8
4.8
4.6
Sc
Sc
4.6
4.4
4.4
4.2
4
4.2
3.8
4
0.1
0.2
0.3
0.4
0.5
0.6
r
(a) Sc vs. r
0.7
0.8
3.6
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
r
(b) Sc vs. r
Figure 3.11: Fix D = 3.912. (a) Sc vs. r with k = 3, A = 30 (dotted curve),
k = 4, A = 40 (solid curve) and k = 5, A = 48 (heavy solid curve). (b) Fix
k = 4, we plot Sc vs. r with A = 36 (dotted curve), A = 37.5 (solid curve),
and A = 40 (heavy solid curve). The square markers indicate spot-splitting
thresholds, and the solid circles mark the equilibrium states.
In Fig. 3.11(b), we fix k = 4 and D = 3.912 and plot Sc vs. r with A = 36
(dotted curve), A = 37.5 (solid curve), and A = 40 (heavy solid curve).
The equilibria are at (re4 , Sce4 ) = (0.60, 4.21), (re5 , Sce5 ) = (0.60, 4.40) and
(re2 , Sce2 ) = (0.60, 4.70), respectively. In this figure we mark the spotreplicating thresholds for each case by the square markers. Note that for k
spots on a ring, the maximum value of the source strength Sc is attained at
the equilibrium location. Therefore, for A = 36 and k = 4, since the source
strength at the equilibrium state is Sce5 = 4.21, which is below the splitting
threshold Σ2 ≈ 4.31, this 4-spot pattern is always stable to spot-splitting for
all values of the ring radius. In contrast, on the solid curve for A = 37.5 and
96
3.7. Comparison of Theory with Numerical Experiments
k = 4 if the ring radius is in the interval between the two square markers,
i.e. 0.35 < r < 0.84, we predict that all four spots will split. From the heavy
solid curve for A = 40 and k = 4 in Fig. 3.11(b), we predict that the four
spots will split simultaneously when r > rs2 = 0.14. We now confirm this
prediction with full numerical results.
Experiment 3.6: One ring pattern with D ≫ O(1): Spot splitting
We fix the parameters as A = 40 and D = 3.912 and consider an initial
4−spot pattern with equally spaced spots lying on an initial ring of radius
r = 0.5 > rs2 . Since the initial common source strength for this pattern
is Sc = 4.69, as obtained from (3.61), we predict that all four spots will
begin to split simultaneously at t = 0. The full numerical solution v at t =
4.6, 70, 93, 381, computed from the GS model (1.7), is plotted in Fig. 3.12.
The numerical computations show that the four spots undergo spot-splitting
in the direction perpendicular to their motion, and generate a pattern of
eight equally spaced spots on a ring. This confirms our prediction based on
the asymptotic analysis.
30
25
20
15
10
-5
5
0
1
1
1
1
0.8
0.8
0.8
0.8
0.6
0.6
0.6
0.6
0.4
0.4
0.4
0.4
0.2
0.2
0.2
0.2
0
0
0
0
-0.2
-0.2
-0.2
-0.2
-0.4
-0.4
-0.4
-0.4
-0.6
-0.6
-0.6
-0.6
-0.8
-0.8
-0.8
-1
-1
-0.5
0
0.5
1
25
20
15
10
-5
5
0
-1
-1
-0.5
0
0.5
1
45
40
35
30
25
20
15
10
-5
5
0
-1
-1
-0.5
0
0.5
1
-0.8
30
25
20
15
10
-5
5
0
-1
-1
-0.5
0
0.5
1
Figure 3.12: Experiment 3.6: Fix D = 3.912, A = 40.0. We start from an
initial 4-spot pattern with spots equally spaced on a ring of radius r = 0.5.
The common source strength is Sc = 4.69. We plot the solution v at t =
4.6, 70, 93, 381 respectively, where we observe that all four spots split. This
leads to an equilibrium eight-spot pattern on a ring.
Next, we consider a different pattern whereby k − 1 spots are equally
spaced on a ring of radius r, with an additional spot located at the center of
the unit disk. The k − 1 spots on the ring have a common source strength
Sc , while the kth spot at the origin has a source strength denoted by Sk .
For this pattern, the spot coordinates in complex form are
xj = re2πij/(k−1) ,
j = 1, 2, . . . , k − 1 ;
xk = 0 .
We will analyze the dynamics of spots and the possibility of spot-splitting
for this pattern for the limiting case D ≫ 1, for which the reduced-wave
97
3.7. Comparison of Theory with Numerical Experiments
Green’s function can be approximated by the Neumann Green’s function.
For this special configuration, Principal Result 3.3 shows that the kth
spot at the center of the disk will not move. Alternatively, the motion of
the remaining k − 1 spots on the ring satisfy
Sc
∇xj F (x1 , . . . , xk−1 ) + Sk ∇xj G(xj ; 0) , (3.64)
x′j = −2πε2 γ(Sc )
2
for j = 1, · · · , k − 1, where
1
p′ (r) e2πij/(k−1) , j = 1, · · · , k − 1 ,
k − 1 k−1
1
1
∇xj G(xj ; 0) =
r−
e2πij/(k−1) .
2π
r
∇xj F (x1 , . . . , xk−1 ) =
For D ≫ 1, the function pk−1 (r) is given in (3.63).
In order to calculate the equilibrium radius rke for this pattern, we need
to solve a coupled system involving the source strengths Sk and Sc . We first
denote µ = 2πν, and then define α and β for D ≫ 1 by
α ≡ G(r; 0) ∼
1
r2
3
D
−
ln r +
−
,
|Ω| 2π
4π 8π
β ≡ R(0; 0) =
D
3
−
.
|Ω| 8π
We substitute these formulae into the nonlinear algebraic system (3.8) and
set x′j = 0 in (3.64) for j = 1, . . . , k − 1. This leads to a three-dimensional
nonlinear algebraic system for the equilibrium radius rke and the source
strengths Sk and Sc given by
Sk
k−2
r 2k−2
Sk
2
−r k−1+
+
= 0,
(3.65a)
− (k − 1)
Sc
2
Sc
1 − r 2k−2
µpk−1 (r)
A = Sc 1 +
+ νχ(Sc ) + µαSk ,
(3.65b)
k−1
A = (k − 1)µαSc + νχ(Sk ) + Sk (1 + µβ)) .
(3.65c)
In Fig. 3.13(a) and Fig. 3.13(b), we fix D = 3.912 and plot the source
strengths Sc and Sk versus the ring radius r for k = 3, A = 22 (solid
curves) and k = 4, A = 38 (heavy solid curves). For each pattern, there
are two equilibrium states, which are marked by the solid circles. The
two equilibrium ring radii for k = 3, A = 22 are re1 = 0.62 with corresponding source strengths (Sc1 , Sk1 ) = (3.22, 3.31), and re2 = 0.49 with
(Sc2 , Sk2 ) = (4.50, 0.56). For k = 4, A = 38, they are re1 = 0.65 with
(Sc1 , Sk1 ) = (4.56, 4.04) , and re2 = 0.57 with (Sc2 , Sk2 ) = (5.70, 0.51). The
98
3.7. Comparison of Theory with Numerical Experiments
6
8
5
6
Sk
Sc
spot-splitting threshold Σ2 is also marked on the curves in Fig. 3.13(a) and
Fig. 3.13(b) by the square markers. On the solid curve for k = 3, they
are at (r, Sc ) = (0.34, 4.31), (r, Sc ) = (0.84, 4.31) and (r, Sk ) = (0.87, 4.31).
On the heavy solid curve for k = 4, they are at (r, Sc ) = (0.74, 4.31) and
(r, Sk ) = (0.68, 4.31).
4
3
4
2
2
0.2
0.4
0.6
0.8
0
0.2
1
0.4
0.6
r
1
(b) Sk vs. r
4.5
8
4
6
Sk
Sc
(a) Sc vs. r
3.5
4
2
3
2.5
0.5
0.8
r
0.6
0.7
0.8
r
(c) Sc vs. r
0.9
1
0
0.5
0.6
0.7
0.8
0.9
1
r
(d) Sk vs. r
Figure 3.13: Fix D = 3.912. (a) Sc vs. r; (b) Sk vs. r. The solid curves
correspond to A = 22, k = 3, the heavy solid curves correspond to A =
38, k = 4, the square markers correspond to spot-splitting thresholds, and
the solid circles correspond to equilibrium ring radii. (c) Sc vs. r; (d) Sk
vs. r. The heavy solid curves correspond to A = 82, k = 10 and the solid
curves correspond to A = 60, k = 10, the square markers correspond to
spot-splitting thresholds, and the solid circles correspond to equilibrium ring
radii.
We now show how Fig. 3.13 can readily be used to predict spot-splitting
99
3.7. Comparison of Theory with Numerical Experiments
behavior.
Experiment 3.7: A one-ring pattern with a center-spot for D ≫ O(1): Different types of spot-splitting
We fix A = 38 and D = 3.912 and consider an initial pattern of one
center-spot and three equally spaced spots on a ring of initial radius r = 0.8.
We can then predict the dynamical behavior of this pattern by appealing
to the heavy solid curves in Fig. 3.13(a) and Fig. 3.13(b). From the data
used to plot Fig. 3.13(a) and Fig. 3.13(b), we obtain that Sk = 5.38 > Σ2
and Sc < Σ2 at t = 0. Therefore, we predict that only the center-spot
will undergo spot-splitting, while the other three spots remain on a ring
whose radius decreases slowly in time. For this parameter set, we show the
full numerical results computed from (1.7) in Fig. 3.14 . These numerical
results confirm the prediction based on the asymptotic theory.
30
25
20
15
10
5
0
1
1
1
1
0.8
0.8
0.8
0.8
0.6
0.6
0.6
0.6
0.4
0.4
0.4
0.4
0.2
0.2
0.2
0.2
0
0
0
0
-0.2
-0.2
-0.2
-0.2
-0.4
-0.4
-0.4
-0.4
-0.6
-0.6
-0.6
-0.6
-0.8
-0.8
-0.8
-1
-1
-0.5
0
0.5
1
25
20
15
10
5
0
-1
-1
-0.5
0
0.5
1
40
35
30
25
20
15
10
5
0
-1
-1
-0.5
0
0.5
1
-0.8
40
35
30
25
20
15
10
5
0
-1
-1
-0.5
0
0.5
1
Figure 3.14: Experiment 3.7: Fix A = 38, D = 3.912. The numerical
results computed from (1.7) for the initial 4-spot pattern are shown for
initial ring radius r = 0.8. The plots (from left to right) are at times
t = 4.6, 46, 102, 298.
Alternatively, suppose that the initial ring radius is decreased from
r = 0.8 to r = 0.5. Then, from the heavy solid curves in the top row
of Fig. 3.13(a) and Fig. 3.13(b), we now calculate that Sc = 4.92 > Σ2 and
Sk < Σ2 at t = 0. Thus, we predict that the three spots on the ring undergo
simultaneous spot-splitting starting at t = 0, while the center-spot does not
split. The full numerical results computed from (1.7), as shown in Fig. 3.15,
fully support this asymptotic prediction.
Experiment 3.8: A one-ring pattern with a center-spot for D ≫ O(1): A
triggered dynamical instability
In Fig. 3.13(c) and Fig. 3.13(d), we fix k = 10 and D = 3.912 and plot Sc
and Sk versus r for A = 82 (heavy solid curve), and for A = 60 (solid curve).
In both figures, solid circles and square markers denote the equilibrium states
100
3.8. Discussion
40
35
30
25
20
15
10
5
0
1
1
1
1
0.8
0.8
0.8
0.8
0.6
0.6
0.6
0.6
0.4
0.4
0.4
0.4
0.2
0.2
0.2
0.2
0
0
0
0
-0.2
-0.2
-0.2
-0.2
-0.4
-0.4
-0.4
-0.4
-0.6
-0.6
-0.6
-0.8
-0.8
-0.8
-1
-1
-0.5
0
0.5
1
35
30
25
20
15
10
-5
5
0
-1
-1
-0.5
0
0.5
1
30
25
20
15
10
-5
5
0
-1
-1
-0.5
0
0.5
1
-0.6
-0.8
35
30
25
20
15
10
-5
5
0
-1
-1
-0.5
0
0.5
1
Figure 3.15: Experiment 3.7: Fix A = 38, D = 3.912. The numerical
results computed from (1.7) for the initial 4-spot pattern are shown for
initial ring radius r = 0.5. The plots (from left to right) are at times
t = 4.6, 56, 140, 298.
and the spot-splitting thresholds, respectively. On the solid curve for A =
60, we have the equilibria at re1 = 0.71 with corresponding source strengths
(Sc1 , Sk1 ) = (2.86, 3.41), and re2 = 0.68 with (Sc2 , Sk2 ) = (3.17, 0.55). In
this case, only the center-spot could split, and the minimum ring radius
that leads to spot-splitting is r = 0.80. Alternatively, on the heavy solid
curve for A = 82, we have the equilibria at re1 = 0.71 with corresponding
source strengths (Sc1 , Sk1 ) = (3.92, 4.81), and re2 = 0.68 with (Sc2 , Sk2 ) =
(4.40, 4.32). In this case, the splitting criteria are (r, Sc ) = (0.52, 4.31) and
(r, Sk ) = (0.68, 4.31).
Consider an initial ring radius of r = 0.62. Then, from the heavy
solid curve in Fig. 3.13(c) and Fig. 3.13(d), we calculate the initial source
strengths as Sc = 4.03 and Sk = 3.38 at t = 0. Therefore, we predict that
spot-splitting is not initiated at t = 0. However, as the ring expands slowly
to approach its equilibrium state at re1 = 0.71, the spot-splitting threshold is
achieved at the ring radius r = 0.68 when Sk begins to exceed Σ2 , Thus, the
asymptotic theory predicts that a dynamical spot-splitting instability will
be triggered at this point. The predicted dynamical instability phenomenon
is confirmed by the full numerical results shown in Fig. 3.16 computed from
the GS model (1.7). From this figure, we observe that this pattern is stable
to spot-splitting for t < 60, but that the center-spot eventually undergoes a
dynamical spot-splitting event.
3.8
Discussion
In this chapter we have characterized the dynamics of a collection of spots
for the GS model (1.7) and have provided an explicit criterion, based on
a linearized stability analysis, for the initiation of a spot-splitting instabil101
3.8. Discussion
25
20
15
10
5
0
1
1
1
1
0.8
0.8
0.8
0.8
0.6
0.6
0.6
0.6
0.4
0.4
0.4
0.4
0.2
0.2
0.2
0.2
0
0
0
0
-0.2
-0.2
-0.2
-0.2
-0.4
-0.4
-0.4
-0.4
-0.6
-0.6
-0.6
-0.8
-0.8
-0.8
-1
-1
-0.5
0
0.5
1
35
30
25
20
15
10
5
0
-1
-1
-0.5
0
0.5
1
35
30
25
20
15
10
5
0
-1
-1
-0.5
0
0.5
1
-0.6
-0.8
25
20
15
10
5
0
-1
-1
-0.5
0
0.5
1
Figure 3.16: Experiment 3.8: Fix A = 82, D = 3.912. The full numerical
results computed from (1.7) for an initial pattern with nine spots equally
spaced on a ring of initial radius r = 0.62 together with a center-spot. The
plots are shown at times t = 60, 93, 144, 214.
ity. The analysis used in this chapter has been a combination of a formal
asymptotic analysis to construct quasi-equilibrium spot patterns and to determine their dynamics, together with a numerical study of a linearized
eigenvalue problem associated with a spot self-replication instability. In
Principal Result 3.1, a quasi-equilibrium k-spot pattern was constructed by
matched asymptotic analysis. The collective coordinates characterizing this
pattern are the spatial configuration (x1 , . . . , xk ) of spots and their corresponding source strengths (S1 , . . . , Sk ), which measure the strengths of the
logarithmic growth of the local, or core, solution for u near each spot. The
slow motion, with speed O(ε2 ), of the spots are characterized by the DAE
system (3.35), where the source strengths are determined in terms of the
instantaneous spatial configuration of spots by the nonlinear algebraic system (3.8). This system incorporates the interaction between the spots and
the geometry of the domain mediated by the reduced-wave Green’s function
and its regular part, and also accounts for all logarithmic correction terms
in ν = −1/ ln ε. The asymptotic results for slow spot motion and the prediction of the initiation of spot self-replication have been successfully validated
through some detailed comparisons with full numerical results computed
from the GS model (1.7) for the unit square and the unit disk.
There are a few problems related to spot dynamics and spot-replication
behavior for the GS model that should be studied. The first problem is to
show that a linear instability of a spot to peanut-splitting does in fact lead
to a spot self-replication event. This problem could perhaps be analyzed by
performing a weakly nonlinear analysis of a localized spot to show that the
initial peanut-splitting instability does not saturate in the nonlinear regime
to a large, but steady-state, deformation of a single spot. The second problem is to use the equilibrium problem in Principal Result 3.4 to calculate
102
3.8. Discussion
detailed bifurcation diagrams in terms of A and D of steady-state k-spot
patterns in arbitrary domains. The third open problem is to study the stability of the equilibrium points of the ODE’s in Principal Result 3.3 describing
slow spot motion. Any unstable eigenvalue of this system is small of order O(ε2 ) and, consequently, represents a weak, or translational instability.
Based on the study of [36] of discrete interacting particles, this instability
should be manifested for the unit disk when the number of equally spaced
spots on a concentric ring exceeds some critical value.
103
Chapter 4
Competition and Oscillatory
Profile Instabilities for the
Two-dimensional Gray-Scott
Model
In §3.2 of Chapter 3 we formulated the eigenvalue problem (3.25) to determine the stability of the core solution near each spot to localized perturbations with angular mode m ≥ 2, which are associated with spot-splitting
instabilities. In this chapter, we focus on the stability of the spot profile to
the radially symmetric m = 0 mode, which is associated with instabilities
in the amplitude of a spot. As shown below, there are two types of such
instabilities; oscillatory instabilities of the spot amplitude, and competition,
or overcrowding, instabilities that lead to the annihilation of a spot.
4.1
Eigenvalue Problem for the Mode m = 0
To determine the stability of the quasi-equilibrium solution ue and ve in
(3.9), we introduce the perturbation
u(x, t) = ue + eλ t η(x) ,
v(x, t) = ve + eλ t φ(x) ,
in (1.7). This leads to the eigenvalue problem
ε2 ∆φ − (1 + λ)φ + 2Aue ve φ + Ave2 η = 0 ,
D∆η − (1 + τ λ)η − 2ue ve φ − ve2 η = 0 ,
∂n φ = ∂n η = 0 ,
x ∈ ∂Ω .
x ∈ Ω,
x ∈ Ω,
(4.1a)
(4.1b)
(4.1c)
In the inner region near the j th spot centered at xj , we introduce ρ, Nj (ρ)
and Φj (ρ) in (4.1) defined by ρ = ε−1 |x − xj |, η = A√ε D Nj (ρ), and φ =
104
4.1. Eigenvalue Problem for the Mode m = 0
√
D
ε Φj (ρ).
Then, when τ satisfies τ λ ≪ O(ε−2 ), we obtain that (4.1) transforms to the following radially symmetric eigenvalue problem on 0 < ρ < ∞:
1 ′
Φ − Φj + 2Uj Vj Φj + Vj2 Nj = λΦj ,
ρ j
1
Nj′′ + Nj′ − Vj2 Nj − 2Uj Vj Φj = 0 ,
ρ
Φ′′j +
(4.2a)
(4.2b)
where Uj and Vj is the solution of the radially symmetric core problem (3.2)
for the j th spot. The boundary conditions for this system are
Φ′j (0) = Nj′ (0) = 0 ;
Φj (ρ) → 0 ,
Nj (ρ) → Cj ln ρ + Bj
as ρ → ∞.
(4.2c)
We emphasize that as ρ → ∞ we must, in general, allow Nj to grow logarithmically. This behavior is in contrast to that imposed for the eigenvalue
problem (3.25) with mode m ≥ 2 studied in Section 3.2, where we required
that Nj → 0 as ρ → ∞. By applying the divergence theorem to (4.2b), we
can identify Cj as
Z ∞
(Vj2 Nj + 2Uj Vj Φj )ρ dρ.
Cj ≡
0
To formulate our eigenvalue problem we must match the far-field logarithmic growth of Nj with a global outer solution for η. This matching has
the effect of globally coupling the local eigenvalue problems near each spot.
Next, we determine the outer problem for η that couples the local problems near each spot. Since v√e is localized near xj for j = 1, . . . , k, we can
use ue ∼ A√ε D Uj , and ve ∼ εD Vj to represent the last two terms in (4.1b)
in the sense of distributions as
√
k Z ∞
2πε D X
2
2
(2Uj Vj Φj + Vj Nj ) ρ dρ δ(x − xj ) .
2ue ve φ + ve η ∼
A
0
j=1
Here δ(x − xj ) is the Dirac delta function concentrated at x = xj . Upon
identifying the integral in the expression above as Cj , we then obtain that
(4.1b) in the outer region becomes
k
2πε X
(1 + τ λ)
η= √
∆η −
Cj δ(x − xj ) ,
D
A D j=1
x ∈ Ω,
(4.3)
105
4.1. Eigenvalue Problem for the Mode m = 0
with ∂n η = 0 for x ∈ ∂Ω. This outer solution can be represented in terms
of a λ-dependent Green’s function as
η=−
k
2πε X
√
Cj Gλ (x; xj ) .
A D j=1
(4.4)
Here this Green’s function Gλ (x; xj ) satisfies
∆Gλ −
(1 + τ λ)
Gλ = −δ(x−xj ) ,
D
x ∈ Ω;
∂n Gλ = 0 ,
x ∈ ∂Ω , (4.5a)
with the following singularity behavior as x → xj :
Gλ (x; xj ) ∼ −
1
ln |x − xj | + Rλ jj + o(1) ,
2π
as x → xj .
(4.5b)
We remark that the regular part Rλjj depends on xj , λ, τ , and D.
The matching condition between the outer solution (4.4) for η as x → xj
and the far-field behavior (4.2c) as ρ → ∞ of the inner solution Nj near the
j th spot yields that
k
1
2πε X
2πε
Ci Gλ ij
Cj − ln |x − xj | + Rλ jj
− √
− √
2π
A D
A D i6=j
ε
Cj
∼ √
+ Bj , (4.6)
Cj ln |x − xj | +
ν
A D
where Gλ ij ≡ Gλ (xi ; xj ) and ν = −1/ ln ε. This matching condition yields
the k equations
Cj (1 + 2πνRλ jj ) + νBj + 2πν
k
X
Ci Gλ ij = 0 ,
j = 1, . . . , k .
(4.7)
i6=j
We remark that the constants τ and D appear in the operator of the λdependent Green’s function defined by (4.5).
Suppose that τ = O(1) and D = O(1). Then, since ν ≪ 1, we obtain
from (4.7) that to leading-order Cj = 0 for j = 1, · · · , k. This implies that
the eigenfunction Nj (ρ) in (4.2) is bounded as ρ → ∞, and so we can impose
that Nj′ (ρ) → 0 as ρ → ∞. Therefore, when τ = O(1) and D = O(1), then to
leading order in ν the eigenvalue problems (4.2) for j = 1, . . . , k are coupled
together only through the determination of the source strengths S1 , . . . , Sk
from the nonlinear algebraic system (3.8) of Chapter 3.
106
4.1. Eigenvalue Problem for the Mode m = 0
Therefore, to leading order in ν, we must compute the real part of the
principal eigenvalue λ0 of (4.2) as a function of Sj , subject to the condition
that Nj′ (ρ) → 0 as ρ → ∞. This computation is done by discretizing
(4.2) by finite differences and then calculating the spectrum of the resulting
matrix eigenvalue problem using LAPACK (cf. [1]). The plot of Re(λ0 )
versus Sj is shown in Fig. 4.1 for the range Sj < 7.5, which includes the
value Sj = Σ2 ≈ 4.31 corresponding to the peanut-splitting instability. We
conclude that Re(λ0 ) < 0 for Sj < 7.5. In Fig. 4.2(a) and Fig. 4.2(b) we plot
the corresponding eigenfunctions Φj (ρ) and Nj (ρ), respectively, for Sj = 3.0
(solid curve) and Sj = 6.0 (dashed curve).
0
-0.1
-0.2
-0.3
Re λ
-0.4
-0.5
-0.6
-0.7
-0.8
-0.9
-1
0
1
2
3
4
S
5
6
7
8
Figure 4.1: The real part of the largest eigenvalue Re(λ0 ) of (4.2) vs. Sj
subject to the condition that Nj is bounded as ρ → ∞.
However, since ν = −1/ ln ε decreases only very slowly as ε decreases,
the leading-order approximation Cj = 0 for j = 1, . . . , k to (4.7) is not very
accurate. Consequently, we must examine the effect of the coupling in (4.7).
Since (4.2) is a linear homogeneous problem, we introduce B̂j by Bj = B̂j Cj ,
and we define the new variables Φ̂j and N̂j by Φj = Cj Φ̂j and Nj = Cj N̂j .
Then, the eigenvalue problem (4.2) on 0 < ρ < ∞ becomes
1 ′
Φ̂ − Φ̂j + 2Uj Vj Φ̂j + Vj2 N̂j = λΦ̂j ,
ρ j
1
N̂j′′ + N̂j′ − Vj2 N̂j − 2Uj Vj Φ̂j = 0 ,
ρ
Φ̂′′j +
(4.8a)
(4.8b)
with boundary conditions
Φ̂′j (0) = N̂j′ (0) = 0 ;
Φ̂j (ρ) → 0 ,
N̂j (ρ) → ln ρ + B̂j , as ρ → ∞ .
(4.8c)
107
4.1. Eigenvalue Problem for the Mode m = 0
0.04
0.3
0.02
0.2
0
-0.02
0.1
N
Φ
-0.04
-0.06
0
-0.08
-0.1
-0.1
-0.12
-0.2
-0.14
-0.16
-0.3
0
2
4
6
ρ
8
10
12
14
16
(a) Φj vs. ρ
0
2
4
6
ρ
8
10
12
14
16
(b) Nj vs. ρ
Figure 4.2: Eigenfunctions Φj and Nj of (4.2) with Nj bounded at infinity.
Left figure: Φj vs. ρ for Sj = 3.0 (solid curve) and Sj = 6.0 (dashed curve).
Right figure: Nj vs. ρ for Sj = 3.0 (solid curve) and Sj = 6.0 (dashed
curve).
The constant B̂j in (4.8c) is a function of the, as yet unknown, complexvalued eigenvalue parameter λ. It also depends on the source strength Sj
through the core solution Uj and Vj , which satisfies (3.2).
In terms of B̂j , the problem (4.7) transforms to the homogeneous linear
system for C1 , . . . , Ck given by
Cj (1 + 2πνRλ jj + ν B̂j ) + 2πν
k
X
Ci Gλ ij = 0 ,
j = 1, . . . , k .
(4.9)
i6=j
It is convenient to express (4.9) in matrix form as
Mc = 0
M ≡ I + νB + 2πνGλ ,
(4.10a)
where I is the k × k identity matrix and c ≡ (C1 , . . . , Ck )t . In (4.10a), B is
a diagonal matrix and Gλ is the λ-dependent Green’s matrix defined by
B̂1 0 · · · 0
Rλ 11 Gλ 12 · · · Gλ 1k
Gλ 21 Rλ 22 · · · Gλ 2k
0 B̂2 , · · · 0
Gλ ≡ .
, B≡ .
.
.
.
..
..
.. .
.
.
.
.
.
.
.
.
.
.
.
.
.
Gλ k1 Gλ k2 · · ·
Gλ kk
0
0
···
B̂k
(4.10b)
Since Gλ is a symmetric matrix, then so is the matrix M.
108
4.1. Eigenvalue Problem for the Mode m = 0
The condition that determines the eigenvalue λ is that there is a nontrivial solution c 6= 0 to (4.10a). Hence, λ is determined by the condition that
M is a singular matrix, i.e. det(M) = 0. This condition leads, effectively,
to a transcendental equation for λ. The roots of this equation determine the
discrete eigenvalues governing the stability of the k-spot quasi-equilibria to
locally radially symmetric perturbations near each spot. We summarize our
formulation of the eigenvalue problem as follows:
Principal Result 4.1: Consider a k−spot quasi-equilibrium solution to
the two-dimensional Gray-Scott model (1.7). For ε → 0, with D = O(1)
and τ = O(1), the stability of this pattern to locally radially symmetric perturbations near each spot is determined by the condition det(M) = 0, where
M is defined in (4.10). The diagonal matrix B in (4.10) is determined in
terms of Sj and λ by the local problems (4.8) for j = 1, . . . , k. If the principal
eigenvalue λ0 of this problem is such that Re(λ0 ) < 0, then the k−spot quasiequilibrium solution is stable to locally radially symmetric perturbations near
each spot. It is unstable if Re(λ0 ) > 0.
We remark that (4.10) couples the local spot solutions in two different
ways. First, the λ-dependent terms Rλ jj and Gλ ij in the Green’s matrix
Gλ in (4.10) depend on τ , D, and λ, as well as the spatial configuration
(x1 , . . . , xk ) of the spot locations.and the geometry of Ω. Secondly, the constant B̂j in the matrix B depends on the eigenvalue λ and on Sj . Recall that
the source strengths S1 , . . . , Sk are coupled through the nonlinear algebraic
system (3.8) of Chapter 3, which involves A, D, the reduced-wave Green’s
function, and the spatial configuration (x1 , . . . , xk ) of spot locations.
From our study of this eigenvalue problem below, there are two mechanisms through which a k-spot quasi-equilibrium pattern can lose stability.
Firstly, for k ≥ 1 there can be a complex conjugate pair of eigenvalues λ0
that crosses into the unstable half-plane Re(λ0 ) > 0. This instability as
a result of a Hopf bifurcation results in an oscillatory profile instability,
whereby the spot amplitudes undergo temporal oscillations. Such an instability typically occurs if τ is sufficiently large. Alternatively, for k ≥ 2, the
principal eigenvalue λ0 can be real and enter the unstable right half-plane
Re(λ0 ) > 0 along the real axis Im(λ0 ) = 0. This instability, due to the creation of a positive real eigenvalue, gives rise to an unstable sign-fluctuating
perturbation of the spot amplitudes and initiates a competition instability,
leading to spot annihilation events. This instability can be triggered if D is
sufficiently large or, equivalently, if the inter-spot separation is too small.
The eigenvalue problem is rather challenging to investigate in full gen-
109
4.1. Eigenvalue Problem for the Mode m = 0
erality owing to the complexity of the two different coupling mechanisms in
(4.10). However, for the special case when the spot configuration (x1 , . . . , xk )
is such that G is a circulant matrix, then the complexity of our eigenvalue
problem reduces considerably. For this special arrangement of spot locations, the spots have a common source strength Sc = Sj for j = 1, . . . , k, as
was discussed in Section 3.1. Hence, the inner problem (4.8) is the same for
each spot. This enforces that B̂j ≡ B̂c for j = 1, . . . , k. where B̂c = B̂c (λ, S)
is a function of Sc and λ. Therefore, we can write B = B̂c I in (4.10). Moreover, let v be an eigenvector of the λ-dependent Green’s matrix Gλ with
eigenvalue ωλ , i.e. Gλ v = ωλ v. This matrix is also circulant when G is circulant. Then, the condition that M in (4.10) is a singular matrix reduces to
k transcendental equations in λ. We summarize the result as follows:
Principal Result 4.2: Under the conditions of Principal Result 4.1, suppose that the spot locations (x1 , . . . , xk ) are such that G, and consequently
Gλ , are circulant matrices. Then, the eigenvalue condition det(M) = 0 for
(4.10) reduces to the k nonlinear algebraic equations that
1 + ν B̂c + 2πνωλ = 0 ,
(4.11)
where ωλ is any eigenvalue of the matrix Gλ . The eigenvectors of Gλ determine the choices for c.
Owing to the considerable reduction in complexity of the eigenvalue
problem when G and Gλ are circulant matrices, we will study in detail the
stability of such symmetric quasi-equilibrium spot patterns in Section §4.5.
4.1.1
Numerical Methods for the Eigenvalue Problem
The eigenvalue problem, consisting of (4.8) coupled with (4.10a), can only
be solved numerically. One numerical approach would be to calculate the
eigenvalue λ directly for a given set of parameters A, D, τ , and ε and for
a given configuration of spots. The outline of a fixed-point iterative type
method is as follows:
√
1. Given fixed parameter values τ, ε, A, D, A = νε−1 A D, we first calculate Sj , j = 1, · · · , k from the algebraic system (3.8), and then compute
the core solution Uj , Vj from (3.2).
2. For the nth iteration, starting from a known eigenvalue λn , we could
solve (4.8) for B̂j for j = 1, . . . , k.
110
4.1. Eigenvalue Problem for the Mode m = 0
3. Next, with B̂j known for j = 1, . . . , k, we could update the value of
λ by requiring that the λ-dependent Green’s function and its regular
part be such that the matrix M in (4.10a) is a singular matrix. This
step requires an additional inner iteration. The new approximation to
the eigenvalue is denoted by λn+1 .
4. We repeat step 2 using the updated λn+1 until it converges to λ, with
an error that is less than a given tolerance Tol = 10−6 . Then λ is the
eigenvalue of the coupled problem.
However, this iteration approach for λ converges very slowly, and very
much relies on the initial guess. In addition, we need to study the stability
for a range of values of the parameter τ , in order to determine the Hopf bifurcation threshold. Therefore, the computational cost of this simple scheme
will be very large.
Instead of the former approach, we used an alternative numerical method
that is based on the assumption that an instability occurs at some critical
values of the parameters. For instance, in order to compute the Hopf bifurcation threshold τH , we assume that there is a complex conjugate pair of
pure imaginary eigenvalues occurring at τ = τH for which λr ≡ Re(λ) = 0
and λi ≡ Im(λ) 6= 0. Instead of solving for λ for each given τ , we fix λr = 0,
and solve for the two variables τH and λi by Newton’s method. A rough
outline of our algorithm is as follows:
1. Given fixed parameter values ε, A, D, we first calculate the source
strength Sj from (3.8) and then compute the corresponding core solution Uj , Vj from (3.2).
2. Fix λr = 0. Starting from the initial guess τ, λi , we calculate Gλ ij ,
Rλ jj and their partial derivatives with respect to τ, λi numerically.
We also calculate B̂j and its derivative ∂λ B̂j from (4.8).
3. In (4.10a), we use Newton’s method on the condition that det(M ) = 0
in (4.10a), to update τ, λi . We then go to step 2 and iterate further
until reaching the specified tolerance.
Although this method is theoretically appealing, the determination of the
constants τ, λi such that det(M) = 0, with M defined in (4.10a), is rather
challenging. As such we will mainly focus on studying the instabilities of a
one-spot solution and the k−spot symmetric patterns with k ≥ 2, for which
the Green’s matrices are circulant. For this special case, Principal Result
111
4.2. Nonlocal Eigenvalue Analysis
4.2 applies. The Hopf bifurcation threshold τH for each of the different spot
patterns considered in §4.3, §4.4, and §4.5, below were calculated by the
algorithm above.
Moreover, to calculate the competition instability threshold, we fix the
parameters ε, D and set λ = 0, since the principal eigenvalue enters the
unstable right half-plane Re(λ) > 0 along the real axis. At some critical
parameter value of D in terms of A, there could be a zero eigenvalue. The
numerical computation of this critical value of D is done from the following
rough algorithm:
1. Given fixed parameters ε, A, and an initial guess for D, we first calculate Sj from (3.8) and then Uj , Vj from (3.2).
2. Fix λ = 0. Starting from the initial guess for D, we calculate Gλ ij ,
Rλ jj and their partial derivatives with respect to D numerically. We
also calculate B̂j and its derivative ∂D B̂j from (4.8).
3. In (4.10a), we use Newton’s method to update D by requiring that
det(M ) = 0. We then iterate until reaching the tolerance.
These numerical algorithms enable us to calculate the threshold parameter values for oscillatory profile instabilities and competition instabilities.
Below in §4.3, §4.4, and §4.5 we demonstrate our theory by numerically computing these instability thresholds for various spot configurations in both
finite and infinite domains.
4.2
Nonlocal Eigenvalue Analysis
In the previous section, we formulated a coupled eigenvalue problem associated with competition and oscillatory profile instabilities. However, in [99]
and [101] a different analytical approach based on an analysis of a nonlocal
eigenvalue problem (NLEP) was used to obtain a leading-order asymptotic
theory for the existence and stability of spot patterns to the GS model (1.7),
with an error of order O(−1/ ln ε). In this section we summarize this theory
and compare it with our quasi-steady state analysis in §3.1 and with our
eigenvalue formulation in §4.1.
4.2.1
A One-spot Solution in an Infinite domain
In [99], the existence and stability of a one-spot pattern in the infinite plane
R2 was studied. In the infinite plane, we can eliminate the parameter D by
112
4.2. Nonlocal Eigenvalue Analysis
introducing x̃ and ε̃ by
x
x̃ = √ ,
D
ε
ε̃ = √ .
D
(4.12)
Then, in terms of x̃ ∈ R2 , (1.7) becomes
vt = ε̃2 ∆v − v + Auv 2 ,
τ ut = ∆u + (1 − u) − uv 2 .
(4.13)
In the inner region near the spot centered at x0 , a different scaling was used
in [99] to construct the local solution near each spot. Instead of a coupled
BVP system for the core problem as in (3.2), the leading-order scaling in
[99] showed that the slow variable u satisfies u ∼ u0 , where u0 is locally
constant near each spot. Moreover, from [99], the fast variable v was found
1
w(ρ), where w(ρ) is the radially symmetric groundto satisfy v ∼ v0 = Au
0
state solution on 0 < ρ < ∞ of the scalar equation
∆ρ w − w + w 2 = 0 ;
w(0) > 0 , w′ (0) = 0 ;
w → 0 , as ρ → ∞ .
(4.14)
The analysis in [99] showed, asymptotically for ε → 0, that u0 satisfies the
quadratic equation
Z ∞
ε̃2
L
,
L≡
w2 (ρ)ρ dρ ,
ν̃ = −1/ ln ε̃ .
(4.15)
1 − u0 ∼
u0
ν̃ A2 0
Therefore, the existence threshold for a one-spot equilibrium solution is that
r
Z ∞
1
b0
L≤
w2 (ρ)ρ dρ .
(4.16)
⇒ A ≥ Af ≡ 2ε̃
,
b0 ≡
4
ν̃
0
Define L0 and γ by L0 = limε̃→0 L = O(1) and γ ≡ ν̃ ln τ = O(1), so that
τ = O(ε̃−γ ). Then, the following nonlocal eigenvalue problem (NLEP) was
derived in [99]:
R∞
2(1 − u0 )(2 − γ)
2 R0 wψ0 ρ dρ
∆y ψ0 − ψ0 + 2wψ0 −
w
= λψ0 , (4.17)
∞ 2
2u0 + (1 − u0 )(2 − γ)
0 w ρ dρ
with ψ0 → 0 as ρ → ∞. An analysis of this NLEP in [99] led to Theorem
2.2 of [99], which we summarize as follows:
1. There exists a saddle node bifurcation at L0 = 41 , such that there are
two equilibrium solutions u±
0 given by
p
1
1
−
4L
u±
=
1
±
0 ,
0
2
for L0 <
1
4,
and no equilibrium solutions when L0 >
1
4.
113
4.2. Nonlocal Eigenvalue Analysis
1
4.
2. Assume that 0 ≤ γ < 2 and L0 <
+
(u+
0 , v0 ) is linearly unstable.
Then, the solution branch
−
3. Assume that 0 ≤ γ < 2. Then, the other solution branch (u−
0 , v0 ) is
linearly unstable if
"
"
2 #
2 #−1/2
1
γ
γ
L0 >
1−
, ⇒ A < As ≡ Af 1 − −
.
4
4+γ
4+γ
(4.18)
4. Assume that γ = 0 and L0 <
1
4.
−
Then, (u−
0 , v0 ) is linearly stable.
−
5. If 0 ≤ γ < 2, the stability of (u−
0 , v0 ) is unknown for A > As .
We remark that the saddle-node bifurcation
value of A, obtained from
(4.15), has the scaling A = O ε̃[− ln ε̃]1/2 as ε̃ → 0. The stability results
listed above from [99] also relate only to this range in A. We remark that
the quasi-equilibrium spot solution constructed in §3.1 and the spot selfreplication threshold of §3.2 occurs for the slightly larger value of A, with
scaling A = O (ε̃[− ln ε̃]) (see (3.4) of §3.1). Consequently, the occurrence
of spot self-replication behavior for the GS model (1.7) was not observed in
the scaling regime for A considered in [99].
4.2.2
Multi-Spot Patterns in a Finite Domain
In [101] a related analytical approach based on the analysis of other NLEP’s
was used to obtain a leading-order asymptotic theory for the existence
and stability of k-spot patterns to the GS model (1.7) in a bounded twodimensional domain. In the inner region near the j th spot centered at
xj , the leading-order scaling in [101] showed that the slow variable u satisfies u ∼ uj , where uj is a constant, while the the fast variable v satisfies
1
w(ρ), where w(ρ) is the radially symmetric ground-state soluv ∼ vj ≡ Au
j
tion of (4.14). For a k-spot pattern, it was shown in [101] that the uj for
j = 1, . . . , k satisfy the nonlinear algebraic system
k
ηε Lε X Lε
1 − uj −
∼
,
uj
ui
(4.19)
i=1
where Lε and ηε are defined by
ε2 2πb0
,
Lε = 2
A |Ω|
|Ω|
ηε =
,
2πDν
b0 =
Z
∞
0
w2 (ρ)ρ dρ ,
ν=−
1
.
ln ε
(4.20)
114
4.2. Nonlocal Eigenvalue Analysis
Here |Ω| is the area of domain. Assuming that uj = u0 has a common value
for all of the spots, then (4.19) is a quadratic equation. In this way, the
following existence criteria for k-spot quasi-equilibria were obtained in [101]
for different ranges of the parameter ηε :
for ηε → 0 ⇔ D ≫ O(ν −1 ),
4kL0 < 1,
(4.21)
4ηε Lε < 1,
for ηε → ∞ ⇔ D = O(1),
−1
4(k + η0 )L0 < 1,
for ηε → η0 ⇔ D = O(ν ) .
Here L0 = limε→0 Lε = O(1) and η0 = limε→0 ηε = O(1).
From (4.20), it follows that the second line in (4.21) is for the parameter
range A = O ε[− ln ε]1/2 with D = O(1), while the third line in (4.21) is for
the range A = O (ε) with D = O(ν −1 ) and ν = −1/ ln ε. We emphasize that
the asymptotic construction of k-spot quasi-equilibria in §3.1 is for the range
D = O(1) and A = O (ε[− ln ε]) (see (3.4) and (3.12)). In addition, equation
(3.19) derived in §3.1 pertains to the range A = O (ε[− ln ε]) with D =
O(ν −1 ). Consequently, the k-spot quasi-equilibrium patterns constructed
in [101] do not correspond to the range A = O (ε[− ln ε]) where spot selfreplication occurs, as considered in our analysis.
As shown in [101], the leading order quasi-equilibrium solution uj ∼ u0
in the inner region, together with the global representation for the v, have
the form
√
1
for D ≫ O(ν −1 ) ,
2 1 ± √1 − 4kL0 ,
1
for
(4.22a)
u±
2 1 ± 1 − 4ηε Lε
0 ∼
D = O(1) ,
p
1
−1
1 − 4(k + η0 )L0 ,
for D = O(ν ) ,
2 1±
v0± ∼
k
X
j=1
1
−1
± w ε |x − xj | .
Au0
(4.22b)
The stability analysis in [101] was largely based on the derivation and analysis of the nonlocal eigenvalue problem
R∞
2 R0 wψρ dρ
∆y ψ − ψ + 2wψ − γ w
= λψ , 0 < ρ < ∞ ,
(4.23)
∞ 2
0 w ρ dρ
with ψ → 0 as ρ → ∞. In (4.23) there are two choices for γ, given by
γ=
2ηε Lε (1 + τ λ) + kLε
,
+ Lε ηε )(1 + τ λ) + kLε
(u20
or
γ=
2ηε Lε
.
+ Lε ηε
u20
(4.24)
115
4.2. Nonlocal Eigenvalue Analysis
In (4.24) it was assumed in [101] that τ = O(1).
Theorem 2.3 of [101] gives a stability result for k-spot equilibrium solution based on an analysis of the NLEP (4.23) together with certain properties
of the multi-variable function F(x1 , . . . , xk ) defined by
F(x1 , . . . , xk ) = −
k
k X
X
i=1 j=1
Gij .
(4.25)
Here G is the Green’s matrix of (3.11) defined in terms of the reduced-wave
Green’s function. It was shown in [101] that the equilibrium spot locations
for an equilibrium k-spot pattern must be at a critical point of F(x1 , . . . , xk ).
We denote by H0 the Hessian of F at this critical point.
Suppose that 4(ηε + k)Lε < 1/4. Then, Theorem 2.3 of [101] proves that
the large solutions (u+ , v + ) are all linearly unstable. For the small solutions
(u− , v − ), the following rigorous results of [101] hold for different ranges of
ηε :
1. Assume that ηε → 0, so that D ≫ O(ν −1 ). Then,
• If k = 1, and all the eigenvalues of the Hessian H0 are negative,
then there exists a unique τ1 > 0, such that for τ < τ1 , (u− , v − )
is linearly stable, while for τ > τ1 , it is linearly unstable.
• If k > 1, (u− , v − ) is linearly unstable for any τ ≥ 0.
• If the Hessian H0 has a strictly positive eigenvalue, (u− , v − ) is
linearly unstable for any τ ≥ 0.
2. Assume that ηε → ∞, so that D ≪ O(ν −1 ). Then,
• If all the eigenvalues of the Hessian H0 are negative, then (u− , v − )
is linearly stable for any τ > 0.
• If the Hessian H0 has a strictly positive eigenvalue, (u− , v − ) is
linearly unstable for any τ ≥ 0.
3. Assume that ηε → η0 , so that D = O(ν −1 ). Then,
0
• If L0 < (2η0η+k)
2 , and all eigenvalues of H0 are negative, then
−
−
(u , v ) is linearly stable for τ = O(1) sufficiently small or τ =
O(1) sufficiently large.
0
• If k = 1, L0 > (2η0η+k)
2 , and all the eigenvalues of H0 are negative,
then there exists τ2 > 0, τ3 > 0, such that for τ < τ1 , (u− , v − ) is
linearly stable, while for τ > τ3 , it is linearly unstable.
116
4.2. Nonlocal Eigenvalue Analysis
• If k > 1 and L0 >
any τ > 0.
η0
,
(2η0 +k)2
then (u− , v − ) is linearly unstable for
• If the Hessian H0 has a strictly positive eigenvalue, (u− , v − ) is
linearly unstable for any τ ≥ 0.
We close this section with several remarks relating our analysis with that
in [101]. Firstly, the condition of [101] that an equilibrium k-spot configuration (x1 , . . . , xk ) must be at a critical point of F in (4.25) is equivalent
to the equilibrium result in Principal Result 3.4 of §3.3 provided that we
replace the source strengths Sj in (3.36) by their leading-order asymptotically common value Sc ∼ A, as given in (3.13). The stability condition of
[101] expressed in terms of the sign of the eigenvalues of the Hessian H0
of F is equivalent to the statement that the equilibrium spot configuration
(x1 , . . . , xk ) is stable with respect to the slow motion ODE dynamics (3.35)
in Principal Result 3.3 when we use the leading-order approximation Sj ∼ Sc
for j = 1, . . . , k in (3.35). Therefore, the condition on the Hessian H0 in
[101] relates to the small eigenvalues of order O(ε2 ) that are reflected in the
stability of equilibrium points under the ODE dynamics (3.35).
Next, we relate our asymptotic parameter ranges considered for A and
D with those considered in [101]. The second result of Theorem 2.3 of [101]
for ηε → ∞, as written above, includes the range D = O(1). The condition
4(ηε + k)Lε < 1/4, together with (4.20) relating
Lε toA, shows this second
result of [101] holds for the range A = O ε [− ln ε]1/2 . Therefore, for this
range of A and D, the analysis in [101] predicts that there is an equilibrium solution branch whose stability depends only on the eigenvalues of the
Hessian matrix H0 . Likewise, it is readily seen that the third statement in
Theorem 2.3 of [101], as written above, pertains to the range D = O(ν −1 )
with A = O(ε). Finally, we remark that, with the exception of the condition on the Hessian matrix of F, the stability criteria developed in [101] can
depend on the number k of spots, but does not depend on the configuration
(x1 , . . . , xk ) of spot locations within the domain.
In our theoretical framework for the stability of k-spot quasi-equilibria
solutions, as expressed in Principal Results 4.1 and 4.2, we considered the
parameter range A = O (ε [− ln ε]) and D = O(1). To leading-order in
ν, where the k spots can be decoupled, we showed from a numerical com′
putation of the two-component eigenvalue problem (4.2) with Nj → 0 as
ρ → ∞, that a k-spot quasi-equilibrium solution is always stable to O(1)
time-scale instabilities. This leading-order result is similar to that proved
in the second statement of Theorem 2.3 of [101] for the nearby parameter
117
4.2. Nonlocal Eigenvalue Analysis
range A = O ε [− ln ε]1/2 and D = O(1). Our goal in the later sections
§4.3, §4.4, and §4.5 is to go beyond this simple leading-order theory in ν and
to show, specifically, that the spatial configuration (x1 , . . . , xk ) does have a
rather significant effect on the stability of quasi-equilibrium k-spot patterns.
In addition, in our stability formulation, we will are able to consider a single
parameter range for A and D, i.e. A = O (ε [− ln ε]) and D = O(1), where
three separate instability mechanisms can occur: spot self-replication, oscillatory instabilities of the spot amplitudes, and competition instabilities of
the spot amplitudes.
4.2.3
Comparison of the Quasi-Equilibrium Solutions
In this sub-section we show that our asymptotic construction of quasiequilibrium k-spot solutions, as given in Principal Result 3.1 of §3.1, can
1/2
be reduced to that given in [101]
when A = O(ν ) in (3.8). Note that
when A = O(ν 1/2 ), then A = O ε [− ln ε]1/2 from (3.4), which is the key
parameter regime of [101].
For A = O(ν 1/2 ), the nonlinear algebraic system (3.8) together with the
core problem (3.2), suggest that we expand Uj , Vj , Sj , and χ, in (3.2) as
χ ∼ ν −1/2 (χ0j + νχ1j + · · · ) ,
Sj ∼ ν 1/2 (S0j + νS1j + · · · ) ,
Uj ∼ ν −1/2 (U0j + νU1j + · · · ) ,
Vj ∼ ν 1/2 (V0j + νV1j + · · · ) .
(4.26)
Upon substituting (4.26) into (3.2), and collecting powers of ν, we obtain
the leading-order problem
∆V0j − V0j +
∆U0j
= 0,
U0j V0j2
= 0,
U0j → χ0j as ρ → ∞ ,
V0j → 0 as ρ → ∞ .
(4.27a)
(4.27b)
At next order, we obtain that
∆U1j = U0j V0j2 ,
U1j → S0j ln ρ + χ1j as ρ → ∞ ,
∆V1j − V1j + 2U0j V0j V1j =
−U1j V0j2
,
V1j → 0 as ρ → ∞ .
(4.28a)
(4.28b)
At one higher order, we find that U2j satisfies
∆U2j = 2U0j V0j V1j + V0j2 U1j ,
U2j → S1j ln ρ + χ2j as ρ → ∞ . (4.29)
The solution to (4.27) is simply U0j = χ0j , and V0j = w/χ0j , where
w(ρ) is the radially symmetric ground-state solution of the scalar nonlinear
118
4.2. Nonlocal Eigenvalue Analysis
problem (4.14). Upon applying the divergence theorem to (4.28a), and using
U0j = χ0j and V0j = w/χ0j , we calculate S0j in terms of χ0j as
Z ∞
Z ∞
b0
2
w2 ρ dρ .
(4.30)
,
b0 ≡
U0j V0j ρ dρ =
S0j =
χ
0j
0
0
Next, we decompose the solution to (4.28) in the form
U1j =
1 χ0j χ1j + Û1j ,
χ0j
V1j =
1 ,
−
χ
χ
w
+
V̂
0j
1j
1j
χ30j
where Û1j and V̂1j are the unique solutions of
∆ρ Û1j = w2 ,
Û1j − b0 ln ρ → 0 as ρ → ∞ ,
∆ρ V̂1j − V̂1j + 2wV̂1j = −Û1j w2 ,
V̂1j → 0 as ρ → ∞ .
(4.31a)
(4.31b)
Similarly, by applying the divergence theorem to (4.29), we calculate S1j as
Z ∞
b0 χ1j
b1
(w2 Û1j + 2wV̂1j ) ρ dρ .
(4.32)
b1 ≡
S1j = − 2 + 3 ,
χ0j
χ0j
0
The BVP solver COLSYS (cf. [2]) is used to numerically compute the ground
state solution w(ρ) of (4.14) and the solutions Û1j and V̂1j of (4.31). Then,
by using a simple numerical quadrature, we calculate b0 = 4.9347 and b1 =
0.8706..
Finally, upon substituting (4.30) and (4.32) into the nonlinear algebraic
system (3.8) of §3.1 we obtain that A = O(ν 1/2 ), where
A = ν 1/2 χ0j
b0
+
χ0j
h b
1
+ ν 3/2 3 +
χ0j
b0
1− 2
χ0j
!
χ1j
k
i
X
b0
b0
+ 2π
Rjj +
Gij . (4.33)
χ0j
χ0i
i6=j
For a prescribed A with A = A0 ν 1/2 + A1 ν 3/2 + · · · , we could then calculate
χ0j andχ1j from (4.33). Since A = O(ν 1/2 ) corresponds to A =
O ε [− ln ε]1/2 , we conclude that it is in this parameter range that the
coupled core problem (3.2) reduces to the scalar ground-state problem for
the fast variable v, as was studied in [101].
119
4.2. Nonlocal Eigenvalue Analysis
Finally, we show that (4.33) reduces to the expression (4.19) used in
[101]. To see this, we note that
√
ε
ε
A Dν
,
uj = √ Uj ≈ √
χ0j .
A=
ε
A D
A Dν 1/2
Moreover, for D ≫ O(1), we use Rjj =
i 6= j. Then, from (4.33), we obtain
D
|Ω|
+ O(1) and Gij =
D
|Ω|
+ O(1) for
√
√
k
X
A Dν
b ε
A Dν
b0 ε
2πνD b0 ε
√
√0
∼
uj + √
+
+
. (4.34)
ε
ε
|Ω|
A D uj
A D uj
A D ui
i6=j
Upon using the definitions of Lε and ηε in (4.20), we can write (4.34) as
1 − uj =
k
k
2π b0 ε2 X 1
Lε ηε X Lε
b0 ε2
+
=
+
,
A2 Dν uj
|Ω| A2
ui
uj
ui
i=1
(4.35)
i=1
which is exactly the same as in (4.19).
4.2.4
Comparison of the Eigenvalue Problem
Next, we show for A = O(ν 1/2 ) and D = O(ν −1 ) that our eigenvalue problem, consisting of (4.2) coupled to (4.7), can be reduced to the nonlocal
eigenvalue problem (4.23) considered in [101]. To show this, we expand Φj ,
Nj , Bj , and Cj , in (4.2) as
Bj = Bj0 + νBj1 + · · · ,
Cj = ν(Cj0 + νCj1 + · · · ) ,
Nj = Nj0 + νNj1 + · · · ,
Φj = νψj + · · · .
Upon substituting these expansions, together with Uj ∼ ν −1/2 χ0j and Vj ∼
ν 1/2 w/χ0j , into (4.2b), we obtain that Nj0 = Bj0 , and that Nj1 satisfies
∆ρ Nj1 =
w2
Bj0 + 2wψj ,
χ20j
Nj1 → Cj0 ln ρ + Bj1 as ρ → ∞ .
Upon applying the divergence theorem to (4.36) we obtain that
Z ∞
Z ∞
b0
w2 ρ dρ .
wψj ρ dρ ,
b0 ≡
Cj0 = 2 Bj0 + 2
χ0j
0
0
(4.36)
(4.37)
Then, we let D = D0 /ν ≫ 1 where D0 = O(1), and we assume that
χ0j = χ0 so that to leading-order each local spot solution is the same. For
120
4.2. Nonlocal Eigenvalue Analysis
D ≫ 1, the λ-dependent Green’s function Gλ (xi ; xj ) and its regular part,
Rλ jj are given by
Gλ ij ∼
D
+ O(1) ,
|Ω|(1 + τ λ)
i 6= j ;
Rλ jj ∼
D
+ O(1) ,
|Ω|(1 + τ λ)
We substitute this leading-order behavior for Gλ ij and Rλjj , together with
Bj ∼ Bj0 , Cj ∼ νCj0 , and D = D0 /ν, into (4.7). In this way, we obtain to
leading-order that (4.7) reduces asymptotically to
k
Cj0 +
X
2πD0
Ci0 + Bj0 = 0 .
(1 + τ λ)|Ω|
i=1
Upon substituting (4.37) for Cj0 into this equation, we obtain that Bj for
j = 1, . . . , k satisfies
b0
1+ 2
χ0
k
b0 X
2πD0
Bi0
Bj0 +
(1 + τ λ)|Ω| χ20
i=1
Z ∞
k Z ∞
X
4πD0
wψj ρ dρ −
= −2
wψi ρ dρ . (4.38)
(1 + τ λ)|Ω|
0
0
i=1
Next, we define the vectors p0 and Ψ by
Z ∞
Z
t
ωψ
ρ
dρ
,
.
.
.
,
p=
(B
,
.
.
.
,
B
)
,
Ψ
=
1
10
k0
0
0
∞
0
ωψk ρ dρ
t
.
This allows us to re-write (4.38) in matrix form as
b0
b0 t
2πD0
4πD0
t
1+ 2 I+
ee
Ψ,
ee
p
=
−
2
I
+
0
(1 + τ λ)|Ω| χ20
(1 + τ λ)|Ω|
χ0
where e = (1, . . . , 1)t . The matrix multiplying p0 is an invertible rank-one
perturbation of the identity matrix. Hence, we calculate that
p0 = DΨ ,
(4.39a)
where the matrix D is defined by
2πD0
4πD0
b0
b0 t −1
t
ee
2I +
D ≡− 1+ 2 I+
ee .
(1 + τ λ)|Ω| χ20
(1 + τ λ)|Ω|
χ0
(4.39b)
121
4.3. Instabilities in an Unbounded Domain
We then rewrite (4.39b) in terms of Lε and ηε , as defined in (4.20), to get
ηε Lε
b0
= 2 ,
χ20
u0
2πD0
1
1
=
.
(1 + τ λ)|Ω|
ηε 1 + τ λ
Then, since the eigenvalues of matrix eet are either k or 0, it readily follows
that the two distinct eigenvalues r1 and r2 of the matrix D are
kL
Lε ηε + 1+τελ
2χ2
,
r1 = − 0 2
kLε
b0 (u0 + Lε ηε ) + 1+τ
λ
r2 = −
2χ20 Lε ηε
.
b0 u20 + Lε ηε
(4.40)
Finally, to obtain a nonlocal eigenvalue problem we substitute Uj ∼
1/2 w/χ , Φ ∼ νψ , and N
0 , Vj ∼ ν
0
j
j
j0 ∼ Bj0 , into (4.2a) to obtain
the vector NLEP
R∞
w2 b0 0 ρwDψ dρ
∆y ψ − ψ + 2wψ + 2 R ∞ 2
= λψ ,
χ0
0 ρw dρ
ν −1/2 χ
where ψ ≡ (ψ1 , . . . , ψk )t . By diagonalizing this vector NLEP by using the
eigenpairs of D, we obtain the scalar NLEP problem
R∞
ρwψc dρ
2 ri b0
R0 ∞
= λψc , i = 1, 2 , (4.41)
∆y ψc − ψc + 2wψc + w
2
2
χ0
0 ρw dρ
where r1 and r2 are the eigenvalues of D given in (4.40). Finally, by using
(4.40) for r1 and r2 , it readily follows that (4.41) reduces to the NLEP (4.23)
studied rigorously in [101].
Therefore, we conclude that our eigenvalue formulation in §4.1
reduces to
leading-order in ν to the NLEP problem of [101] when A = O ε [− ln ε]1/2
and D = O(ν −1 ).
4.3
Instabilities in an Unbounded Domain
In this section, we calculate stability thresholds for the case of the infinite
planar domain R2 . For
√ this domain, we can eliminate the diffusivity D by
scaling x and ε with D as in (4.12). Therefore, without loss of generality,
we take D = 1 in this section. For D 6= 1, we simply note that ε and x must
be re-defined as in (4.12).
For the infinite-domain problem with Ω = R2 , the reduced-wave Green’s
function and its regular part satisfying (3.6) with D = 1 is simply
G(x; xj ) =
1
K0 |x − xj | ,
2π
Rjj =
1
(ln 2 − γe ) .
2π
(4.42)
122
4.3. Instabilities in an Unbounded Domain
Here γe is Euler’s constant, and K0 (r) is the modified Bessel function of the
second kind of order zero.
The construction of a k-spot quasi-equilibrium solution with spots at
xj ∈ R2 for j = 1, . . . , k proceeds by the analysis in §3.1. This quasiequilibrium solution is given in (3.9) of Principal Result 3.1, where from (3.8)
and (4.42), the source strengths S1 , . . . , Sk satisfy the nonlinear algebraic
system
k
X
A = Sj 1 + ν(ln 2 − γe ) + ν
Si K0 |xi − xj | + νχ(Sj ) ,
j = 1, . . . , k ,
i6=j
−1
A=ε
νA ,
ν = −1/ ln ε .
(4.43a)
(4.43b)
To determine the stability of the k-spot quasi-equilibrium solution to
locally radially symmetric perturbations, we must find the eigenvalues of
the coupled system, consisting of (4.8) for j = 1, . . . , k together with the
homogeneous linear system (4.9). The λ-dependent Green’s function and its
regular part, satisfying (4.5) with D = 1 in R2 , are given by
√
1
1 + τ λ |x − xj | ,
K0
2π
√
1 ln 2 − γe − log 1 + τ λ .
=
2π
Gλ (x; xj ) =
Rλ jj
(4.44a)
(4.44b)
Since λ can be complex, we must take log
√ z to be the principal branch of the
logarithm function and choose for z = 1 + τ λ the principal branch of the
square root, in order that K0 (z) decays when z → ∞ along the positive real
axis. In terms of these Green’s functions, the homogeneous linear system
(4.9) becomes
√
Cj 1 + ν(ln 2 − γe − log 1 + τ λ + B̂j )
+ν
k
X
i6=j
Ci K0
√
1 + τ λ |xi − xj | = 0 ,
j = 1, . . . , k . (4.45)
From this formulation, in the next two subsections we consider the specific cases of one- and two-spot solutions in R2 .
123
4.3. Instabilities in an Unbounded Domain
4.3.1
A One-Spot Solution
For a one-spot pattern with spot at the origin, (4.43) reduces to the scalar
nonlinear algebraic equation
A = S1 + νS1 (ln 2 − γe ) + νχ(S1 ) ,
A = ε−1 νA ,
ν = −1/ ln ε . (4.46)
In order that C1 6= 0 in (4.45), we require that λ satisfy
√
1 B̂1 + + ln 2 − γe − log 1 + τ λ = 0 .
ν
(4.47)
Here B̂1 = B̂1 (λ, S1 ) is to be computed from the inner problem (4.8) in
terms of the core solution U1 and V1 . Therefore, (4.47) is a transcendental
equation for the eigenvalue λ.
We now use our numerical procedure, outlined in §4.1.1, to compute λ
and to determine the threshold conditions for instability of the one-spot
profile.
Experiment 4.1: One-spot solution in the infinite domain: A Hopf bifurcation
For a one-spot solution in R2 , our computational results lead to a phase
diagram in the A versus τ parameter-plane characterizing the stability of a
one-spot solution. In the numerical results below we have fixed ε = 0.02.
Firstly, from (4.46) we compute that there is no quasi-equilibrium onespot solution when A ≥ Af = 0.1766. This minimum value of A for the
existence of such a solution was obtained by varying the source strength S1
in (4.46) in the interval S1 ∈ [0.22, 7.41]. This value A = Af is the lower
horizontal dot-dashed line in Fig. 4.3(a). The peanut-splitting threshold for
A, obtained from the theory in Chapter 3, is obtained by using the spotsplitting criterion S1 = Σ2 ≈ 4.3071 and χ(Σ2 ) ≈ −1.783 in (4.46), which
yields A2 = 0.311. This threshold value for spot self-replication is shown by
the heavy dotted horizontal line in Fig. 4.3(a). Then, we use the numerical
algorithm in §4.1.1 to compute a Hopf bifurcation threshold τ = τH for
values of A in the interval A ∈ [0.1766, 0.298]. At this Hopf bifurcation
value, a complex complex conjugate pair of eigenvalues first enters the right
half-plane. In Fig. 4.3(a), we plot the Hopf bifurcation value A vs. τH by
the solid curve. The resulting parameter-plane as shown in Fig. 4.3(a) is
divided into four distinct regions with different solution behavior.
The behavior of the one-spot solution in the four different regions of
Fig. 4.3(a) is as follows. In Regime σ with A < Af , the quasi-equilibrium
solution does not exist; in Regime β enclosed by the dot-dashed line Af =
124
4.3. Instabilities in an Unbounded Domain
0.4
0.3
τ increasing
θ
0.2
0.3114
Im λ
A
0.1
γ
0.25
-0.1
β
0.2
0
0.1766
-0.2
0.15
σ
8
50
τ
(a) A vs. τ
100
150
200
-0.3
250
316.25
-0.04
Re λ
(b) Im(λ) vs. Re(λ)
-0.03
-0.02
-0.01
0
0.01
0.02
Figure 4.3: Experiment 4.1: One-spot solution in R2 . (a) Phase-diagram
in the parameter plane A vs. τ . The solid curve plots the Hopf bifurcation threshold τH , the lower horizontal dot-dashed line plots the existence
condition Af = 0.1766 and the upper heavy dotted horizontal line indicates
the spot-splitting threshold A2 = 0.311. Regime σ: No quasi-equilibrium
solution exists; Regime β: Oscillations in the spot amplitude; Regime γ:
Stable one-spot solution; Regime θ: spot self-replication regime. (b) Fix
A = 0.18, we plot the spectrum in the complex λ plane for τ ∈ [30, 40]. At
τ = 30, λ = −0.026 ± 0.296 i. At τ = 36.05,
√ λ = −0.000049 ± 0.285 i. At
τ = 40, λ = 0.015 ± 0.278 i. Here i ≡ −1. As τ increases a complex
conjugate pair of eigenvalues enters the right half-plane.
125
4.3. Instabilities in an Unbounded Domain
0.1766 and the solid Hopf bifurcation curve, the quasi-equilibrium solution
is unstable to an oscillatory profile instability; in Regime γ it is stable; and
in Regime θ, it is unstable to spot self-replication.
In Fig. 4.3(b), we fix A = 0.18 and plot the eigenvalue λ in the complex
plane for the range τ ∈ [30, 40]. Note that for A = 0.18, the Hopf bifurcation
threshold τH = 36.06 is where the complex conjugate pair of eigenvalues
intersect the imaginary axis. As τ increases, we find numerically that Re(λ)
increases.
0.185
A
0.182
0.18
0.1766
0.175
0.5
0.6
0.7
γ
0.8
0.9
1
Figure 4.4: One-spot solution in R2 . In the parameter plane A vs. γ ≡
− ln τ / ln ε, we plot the existence threshold Af = 0.1766 by the thin dashed
line, our Hopf bifurcation threshold A by the dot-dashed curve, and the stability threshold Ãs from the NLEP theory by the thick solid curve.
In Fig. 4.4, we compare the stability threshold for A obtained from a numerical computation of the coupled eigenvalue formulation (4.8) and (4.47)
with that obtained from the NLEP analysis of [99], summarized in §4.2.1.
Recall from (4.16) and (4.18) that there are two threshold values Ãf and Ãs
predicted from the leading-order (in ν) NLEP theory of [99]. For A < Ãf a
one-spot quasi-equilibrium solution does not exist. For A < Ãs this solution
is unstable. These threshold values, with Ãs depending on τ , are
r
Z ∞
b0
w2 (ρ)ρ dρ ≈ 4.9347 ,
(4.48a)
, b0 ≡
Ãf ≡ 2ε
ν
0
"
2 #−1/2
γ
Ãs ≡ Ãf 1 − −
,
γ ≡ −ln τ / ln ε .
(4.48b)
4+γ
For ε = 0.02, we compute that Ãf ≈ 0.1757, which agrees very well with
our existence threshold value Af ≈ 0.1766. In Fig. 4.4 we compare the
126
4.3. Instabilities in an Unbounded Domain
NLEP stability threshold Ãs versus γ = − ln τ / ln ε with the Hopf bifurcation threshold A versus γ = − ln τH / ln ε, which corresponds to the solid
curve of Fig. 4.3(a). We recall from §4.2.1 that the NLEP theory predicts
instability when A < Ãs for 0 ≤ τ ≤ ε−2 , but has no conclusion regarding
stability or instability if A > Ãs . Our Hopf bifurcation threshold predicts
that stability changes when we cross the heavy solid curve in Fig. 4.4. Therefore, we conclude that our stability result and that predicted by the NLEP
theory are only in disagreement for τ sufficiently large, after the two curves
in Fig. 4.4 have crossed. This disagreement likely results from neglecting
quantitatively significant logarithmic correction terms in ν = −1/ ln ε in the
leading-order NLEP theory.
4.3.2
A Two-Spot Solution
Without loss of generality, we assume that the two spots are centered at
(α, 0) and (−α, 0) with α > 0 along the horizontal axis. The distance
between the two spots is 2α. Since the domain is the infinite plane, the
two spots always drift apart along the horizontal axis with speed O(ε2 ) as t
increases, and there is no final equilibrium solution. However, this motion is
slow compared to the possibility of O(1) time-scale oscillatory or competition
instabilities of the spot profile. We now numerically determine the range of
parameters for these instabilities.
For this two-spot quasi-equilibrium solution, it was shown in (3.46) that
the spots have a common source strength Sc , which satisfies
1
,
ln ε
(4.49)
where γe is Euler’s constant. The λ-dependent Green’s function is given
in (4.44) and the λ-dependent Green’s matrix Gλ is circulant. Therefore,
Principal Result 4.2 applies. The eigenvectors Vi for i = 1, 2 and eigenvalues
ωλ i for Gλ are V1 ≡ (1, 1)t and V2 ≡ (1, −1)t , where
√
√
ωλ 1 = Gλ12 + Rλ11 = K0 (2α 1 + τ λ) + (ln 2 − γe − log 1 + τ λ) , for V1 ,
√
√
ωλ 2 = Gλ12 − Rλ11 = K0 (2α 1 + τ λ) − (ln 2 − γe − log 1 + τ λ) , for V2 .
A = Sc [1 + ν(ln 2 − γe ) + νK0 (2α)] + ν χ(Sc ) ,
A = ε−1 νA ,
ν=−
From (4.11) of Principal Result 4.2, our stability formulation is to find the
roots of the two transcendental equations for λ, given by
1 + ν B̂c + 2πνωλ j = 0 ,
j = 1, 2 ,
(4.50)
where B̂c (λ, Sc ) is to the common value for B̂j for j = 1, 2 in (4.8).
127
4.3. Instabilities in an Unbounded Domain
We will show numerically below that in some region of the A versus α
parameter plane the two-spot solution becomes unstable when τ is increased
due to the creation of an unstable eigenvalue λ from ωλ 1 as a result of a
Hopf bifurcation. Since this oscillatory instability is associated with the
eigenvector V1 = (1, 1)t = (C1 , C2 )t , it leads to the initiation of a simultaneous in-phase oscillation in the amplitudes of the two spots. In another
region of the A versus α parameter plane we will also show numerically that
an unstable eigenvalue λ for ωλ 2 can occur even when τ = 0 if the inter-spot
separation distance 2α is below some threshold. This instability results from
the creation of a real positive eigenvalue. Since this instability is associated
with the eigenvector V2 = (1, −1)t = (C1 , C2 )t , it leads to the initiation of a
sign-fluctuating instability in the amplitudes of the two spots, which leads
ultimately to the annihilation of one of the two spots. Since this instability
is triggered when 2α is sufficiently small, it is also referred to either as a
competition or an overcrowding instability.
Experiment 4.2: Two-spot solution in the infinite plane: Oscillatory profile
instabilities and competition instabilities
We fix ε = 0.02 in the computations below. In Fig. 4.5(a) the two-spot
existence threshold Af as a function of α ∈ [0.02, 2.02] is shown by the lower
solid curve, while the spot self-replication threshold A2 vs. α is shown by
the top solid curve. To obtain Af we determined the minimum value of A
as Sc is varied in (4.49), while A2 is obtained by setting Sc = Σ2 ≈ 4.31
in (4.49). In Fig. 4.5(a) the middle dotted curve is the threshold for the
onset of a competition instability. These three curves separate the A versus
α parameter-plane of Fig. 4.5(a) into four distinct regions. In Regime σ,
the quasi-equilibrium two-spot solution does not exist. In Regime β, the
two-spot quasi-equilibrium solution undergoes a competition instability for
any τ ≥ 0. This instability ultimately leads to the annihilation of one of
the spots. We note that competition threshold approaches the existence
threshold when the inter-separation distance α becomes large. This is because when α is sufficiently large, the spots essentially do not interact, and
there is no competition instability for a one-spot solution in R2 . In Regime
ζ, the two-spot pattern is stable to a competition instability, but becomes
unstable to an oscillatory profile instability only when τ is large enough. As
τ increases above a certain threshold τH , a Hopf bifurcation occurs and the
two-spot solution is unstable to either in-phase or out-of-phase spot amplitude oscillations. The in-phase, or synchronous, oscillatory instability is the
dominant of these two types. In Regime θ the two-spot quasi-equilibrium
solution is unstable to spot self-replication for any τ ≥ 0.
128
4.3. Instabilities in an Unbounded Domain
250
0.6
0.55
200
0.5
θ
150
0.4
τ
A
0.45
0.35
100
0.3
0.25
ζ
β
50
0.2
σ
0.15
0
0.5
α
(a) A vs. α
1
1.5
2
0
0.7
0.5
α
(b) τ vs. α
1
1.5
2
0.25
0.2
0.6
0.15
τ increasing
0.1
0.4
Im λ
Im λ
0.5
0.3
0.05
0
-0.05
-0.1
0.2
-0.15
0.1
-0.2
0
0
0.2
0.4
0.6
α
(c) λi vs. α
0.8
1
1.2
1.4
1.6
1.8
2
2.2
-0.25
-0.08
-0.06
Re λ
(d) Im(λ) vs. Re(λ)
-0.04
-0.02
0
0.02
0.04
0.06
Figure 4.5: Experiment 4.2: Two-spot solution in R2 . (a) We plot the existence threshold Af vs. α by the lower curve, and the spot-splitting threshold
A2 vs. α by the top curve. (b) Hopf bifurcation threshold τH1 associated with
in-phase oscillations (bottom of each pair of curves) and τH2 associated with
out-of-phase oscillations (top of each pair of curves), are plotted as a function of α for A = 0.18 (bottom pair), A = 0.2 (middle pair), and A = 0.22
(top pair). The dotted portions on τH1 correspond to the parameter regime
β in subfigure (a) where competition instabilities occur for any τ . (c) Imaginary part λi of λ versus α at the Hopf bifurcations thresholds for A = 0.18
(bottom), A = 0.2 (middle), and A = 0.22 (top). The heavy solid curves
are the eigenvalues associated with in-phase oscillations, and the thin solid
curves are the eigenvalues for out-of-phase oscillations. The dotted portions
lie on τH1 where a competition instability occurs. (d) Eigenvalue path in
the complex plane for A = 0.18 and α = 1 on the range τ ∈ [10, 20]. The
eigenvalues associated with in-phase and out-of-phase oscillations enter the
right half plane at τH1 and τH2 , respectively.
129
4.3. Instabilities in an Unbounded Domain
A a function of α and for three values of A, in Fig. 4.5(b) we plot the Hopf
bifurcation thresholds τH1 , associated with the eigenvector V1 = (1, 1)t (the
bottom curve in each pair of curves), and τH2 , associated with eigenvector
V2 = (1, −1)T (the top curve in each pair of curves). From the bottom
pair of curves to the top pair in Fig. 4.5(b), the values of A are A = 0.18,
A = 0.2 and A = 0.22, respectively. We observe that for each fixed A, the
two thresholds τH1 and τH2 essentially overlap when α is large enough. This
is because when the two spots are far away, the interaction between them
is negligible. As a consequence, when α → ∞, each of the two spots can be
treated as a single isolated spot in the infinite plane, so that both τH1 and
τH2 approximate the Hopf bifurcation threshold τH of an isolated one-spot
solution.
From Fig. 4.5(b) the Hopf bifurcation curves for τH1 , which each have
a dotted portion, end at the values αf = 0.888, 0.206, 0.068 for the curves
A = 0.18, 0.2, 0.22, respectively. At these critical values of α, the quasiequilibrium existence condition A > Af (α) is no longer satisfied. Moreover,
the Hopf bifurcation threshold τH2 terminates at another set of critical values αc = 0.904, 0.28, 0.16 for the curves A = 0.18, 0.2, 0.22, respectively. The
reason for this disappearance is seen in Fig. 4.5(c), where we plot the imaginary part of the eigenvalues at the Hopf bifurcation thresholds for V1 (curves
with dotted portions) and V2 (curves without dotted portions). From this
figure it is clear that as α → αc from above, the complex conjugate pair of
eigenvalues associated with τH2 merge onto the real axis at the origin, which
is precisely the crossing point for the onset of a competition instability.
When the spots are two close in the sense that αf < α < αc , then there is
a positive real eigenvalue in the unstable right half-plane for any τ ≥ 0. If in
addition, τ < τH1 , it is the only unstable eigenvalue. This eigenvalue is the
one associated with a competition instability. In Fig. 4.5(b) and Fig. 4.5(c),
the dotted segments of the curves correspond to the range of α where this
competition instability occurs.
Next, we observe from Fig. 4.5(b) that τH1 ≤ τH2 . Therefore, the inphase synchronous oscillatory instability of the spot amplitudes is always the
dominant instability mechanism for each α > αc as τ is increased. Moreover,
we observe that the Hopf bifurcation threshold τH1 is an increasing function
of spot inter-separation distance. Recall that the slow dynamics of the
two spots is repulsive in the sense that α increases as t increases, with
speed O(ε2 ) (see (3.47) of Section §3.5).. The monotone increasing nature
of τH1 with α eliminates any possibility of a dynamically triggered oscillatory
instability for the two-spot solution. Namely, consider an initial two-spot
quasi-equilibrium with initial inter-separation distance 2α0 and with a fixed
130
4.4. A One-Spot Solution in a Finite Domain
τ with τ < τH1 (α0 ), where α0 > αc . Then, since α increases as time t
increases, and τH1 is monotone increasing in α, we conclude that τ < τH1 (α)
for any t > 0. Therefore, there are no dynamically triggered oscillatory
instabilities for two-spot patterns on the infinite plane..
We remark that the phase diagram obtained for the two-spot quasiequilibrium solution in R2 is qualitatively rather similar to the case of a
two-spike solution to the one-dimensional GS model on the infinite real line
in the low reed-rate regime, as was studied in [86].
Finally, we show a plot of the eigenvalue in the complex plane as τ is
increased. We take A = 0.18 and α = 1.0, and we vary τ ∈ [10, 20]. The
two Hopf bifurcation values are, respectively, τH1 = 13.1 and τH2 = 15.6.
The paths of the eigenvalue in the complex plane as τ increases are shown
in Fig. 4.5(d) for the eigenvectors V1 (solid curves) and V2 (dotted curves)
For each of these eigenvectors, the real part of both eigenvalues λr increases
as τ increases.
4.4
A One-Spot Solution in a Finite Domain
Next, we study the stability of a one-spot quasi-equilibrium solution in a
finite domain. We will only consider the unit disk and the unit square,
since it is for these domains that the reduced-wave Green’s functions and
its regular part, satisfying (3.6), are analytically known (see Section 3.6).
We remark that for these special domains, the λ-dependent Green’s function
and its regular part, satisfying (4.5), can be readily obtained by replacing
D with D/(1 + τ λ) in the formulae for the reduced-wave Green’s functions
given in Section 3.6. Since λ is in general complex, we require that the
software for the necessary special function evaluations in Section 3.6 can
treat the case of complex arguments.
4.4.1
A One-Spot Solution in the Unit Disk
Consider the unit disk Ω = {x : |x| ≤ 1}, and suppose that a one-spot
quasi-equilibrium solution is centered at x0 inside the unit disk.
Experiment 4.3: One-spot solution in the unit disk: Dynamical profile instability
Let r = |x0 denote the distance from the spot to the center of the unit
disk, so that 0 ≤ r ≤ 1. The equilibrium location for the slow dynamics of
the spot is at the center r = 0, as seen from Principal Result 3.3. We choose
a value for the feed-rate parameter A such that A exceeds the existence
131
4.4. A One-Spot Solution in a Finite Domain
threshold Af for the entire range 0 < r < 1. In Fig. 4.6(a), we plot the
Hopf bifurcation threshold τH versus r for fixed A = 0.16, but for different
values of the diffusivity D. The two solid curves in this figure correspond
D = 4, 5, with the lower solid curve in this figure corresponding to D = 4.
For these values of D, we observe from Fig. 4.6(a) that the maximum of
τH = τH (r) is obtained at the equilibrium location r = 0, and that τH
decreases monotonically as r increases. Next, we plot by the dashed curves,
the Hopf bifurcation thresholds for the larger values of D given by D =
6, 7, 8. Notice that for these larger values of D, the curves of τH = τH (r)
are concave down near r = 0, which yields a local minimum for τH at
r = 0. Therefore, we conclude that when D is sufficiently large, we can
obtain a dynamically triggered oscillatory instability in the spot amplitude.
To illustrate this, suppose that D = 8. Then, we calculate τH (0) ≈ 3.73
and τH (0.612) ≈ 3.88. Suppose that we take τ = 3.8 with the initial spot
location at time t = 0 at r = 0.612. Then, since τ < τH (0.612), the spot is
stable at t = 0. However, since the motion of the spot is towards the origin
and τ > τH (0), it follows that a dynamically triggered oscillatory profile
instability will occur before the spot reaches the center of the disk.
We did a similar numerical experiment for A = 0.18. For this value
of A, we plot τH versus r in Fig. 4.6(b). The solid curves correspond to
D = 2, 3, for which τH (r) has a maximum at r = 0. For the value D =
4.3, 5, 6, as indicated by the dashed curves, τH (r) has a local minimum
at the equilibrium location r = 0. For these larger values of D, we can
choose a value of τ and an initial spot location that will lead to a dynamical
instability.
Experiment 4.4: One-spot solution in the unit disk: A profile instability
observed by full numerical simulation
In this experiment we compare our numerically computed Hopf bifurcation threshold obtained from the coupled eigenvalue problem with full
numerical results for the threshold as computed from the Gray-Scott PDE
model (1.7). The full system was computed numerically by an explicit timestep finite element code, which was first developed and used in [50]. Given
a parameter set ε, τ, A, D and an initial condition, we evolve the solution to
the PDE (1.7) in time, and record the amplitude vm = max{v(x) : x ∈ Ω}
of the solution component v at each time step. In Fig. 4.7, we plot vm vs. t
with fixed parameters ε = 0.02, A = 0.16, and D = 4 for three values of τ .
This figure shows that the unstable oscillation occurs near τ = 3.2, which
roughly agrees with the Hopf bifurcation threshold τH ≈ 3.5 computed from
our coupled eigenvalue formulation (see Fig. 4.6(a)). We remark that if
132
4.4. A One-Spot Solution in a Finite Domain
4
40
35
3.5
30
25
τ
τ
3
20
2.5
15
10
2
5
1.5
0
0
0.2
0.4
r
0.6
0.8
1
0
0.2
(a) τH vs. r A = 0.16
0.4
0.6
r
vs. r A = 0.18
(b) τH
0.8
1
Figure 4.6: Experiment 4.3: One-spot solution in the unit disk. Plot of
τH vs. r for different A and D. (a) Fix A = 0.16. The solid curves are
for D = 4, 5, arranged from lower to upper y−intercepts, respectively. The
dashed curves are for D = 6, 7, 8, arranged from upper to lower y-intercepts,
respectively. (b) Fix A = 0.18. The solid curves are for D = 2, 3 arranged
from lower to upper y−intercepts, respectively. The dashed curves are for
D = 4.3, 5, 6, arranged from upper to lower y−intercepts, respectively.
we changed the parameters to be A = 0.18, and D = 6, then τH ≈ 10.3
(see Fig. 4.6(b)), as predicted by our coupled eigenvalue formulation. This
compares reasonably well with the result τ ≈ 9 as observed in Fig. 4.8 and
computed from the full numerical computations of (1.7).
48
50
65
47
60
48
46
55
45
46
44
50
44
43
45
42
42
40
41
40
40
35
39
38
30
38
37
36
0
10
20
30
40
50
(a) τ = 3.0
60
70
25
0
10
20
30
40
50
(b) τ = 3.2
60
70
0
10
20
30
40
50
60
70
(c) τ = 3.4
Figure 4.7: Experiment 4.4: One-spot solution with spot at the center of the
unit disk. We fix ε = 0.02, A = 0.16, D = 4, and plot the spot amplitude vm
vs. t for (a) τ = 3; (b) τ = 3.2; (c) τ = 3.4.
133
4.4. A One-Spot Solution in a Finite Domain
65
65
64
64
63
63
62
62
61
61
60
60
59
59
58
58
57
57
56
56
68
66
64
62
60
58
56
55
55
0
10
20
30
40
50
(a) τ = 8.5
60
70
54
0
10
20
30
40
50
60
70
(b) τ = 9.0
0
10
20
30
40
50
60
70
(c) τ = 9.5
Figure 4.8: Experiment 4.4: One spot solution with spot at the center of the
unit disk. We fix ε = 0.02, A = 0.18, D = 6, and plot the spot amplitude vm
vs. t for (a) τ = 8.5; (b) τ = 9.0; (c) τ = 9.5.
4.4.2
A One-Spot Solution in a Square
In this subsection we compute stability thresholds for a one-spot quasiequilibrium solution in the unit square Ω = [0, 1] × [0, 1].
Experiment 4.5: One-spot solution in a square: A dynamical profile instability compared with full numerical simulations
We fix ε = 0.02, and we let the spot be centered on the diagonal line
(x, x). From Principal Result 3.3 it follows that the spot will move slowly
along this diagonal until it approaches its equilibrium location at (0.5, 0.5).
In Fig. 4.9(a), we fix A = 0.28, and plot τH vs. x for D = 1 (heavy solid
curve), D = 1.5 (solid curve), D = 2 (dotted curve) and D = 2.5 (dashed
curve) as computed from our eigenvalue problem. The last two curves show
the existence of a dynamical instability, since as the spot drifts towards its
equilibrium location along the diagonal of the unit square the Hopf bifurcation threshold decreases. In Fig. 4.9(b), we fix D = 1, and plot τH vs. x
for four values of A. In Fig. 4.10, we plot the numerically computed spot
amplitude vm = vm (t) for a spot centered at the midpoint of the unit square.
This spot amplitude was computed for three values of τ from the full GS
model (1.7) by using the fortran software package VLUGR2 (cf. [7]). The
estimated Hopf bifurcation value is τ ≈ 3.3, which compares very favorably
with our prediction of τH as seen in Fig. 4.9(a).
134
4.4. A One-Spot Solution in a Finite Domain
3.6
180
3.4
160
3.2
140
3
120
2.8
100
τ
τ
2.6
2.4
80
2.2
60
2
40
1.8
20
1.6
1.4
0
0.5
0.55
0.6
0.65
0.7
0.75
x
(a) τH vs. x
0.8
0.85
0.9
0.5
0.55
0.6
0.65
0.7
0.75
0.8
0.85
0.9
0.95
x
(b) τH vs. x
Figure 4.9: Experiment 4.5: One-spot solution centered at (x, x) on a diagonal of the unit square [0, 1] × [0, 1] (a) Fixing A = 0.28, we plot τH vs. x for
D = 1 (lower solid curve), D = 1.5 (upper solid curve), D = 2 (dotted curve)
and D = 2.5 (dashed curve). The last two curves for larger values of D show
the existence of a dynamical oscillatory instability in the spot amplitude since
as the spot drifts towards its equilibrium location along the diagonal, the
Hopf bifurcation threshold decreases and has its minimum at the center of
the square. (b) Fixing D = 1, we plot τH vs. x for A = 0.28, 0.3, 0.35, 0.4,
arranged from lower to upper y−intercepts, respectively.
26
26.5
25.5
26
28
27
25.5
25
26
25
24.5
24.5
25
24
24
24
23.5
23.5
23
23
23
22.5
22
22
22.5
0
10
20
30
40
50
60
(a) τ = 3.2
70
80
22
0
10
20
30
40
50
60
(b) τ = 3.3
70
80
21
0
10
20
30
40
50
60
70
80
(c) τ = 3.4
Figure 4.10: Experiment 4.5: One-spot solution in a square. We fix ε = 0.02,
A = 0.28, D = 1, and let the spot be located at its equilibrium location
x = (0.5, 0.5). From the full GS model we plot the spot amplitude vm vs. t
for (a) τ = 3.2; (b) τ = 3.3; (c) τ = 3.4.
135
4.5. Symmetric k−Spot Patterns in a Finite Domain
4.5
Symmetric k−Spot Patterns in a Finite
Domain
Next, we consider multi-spot patterns in a finite domain. It is computationally rather intensive to numerically study our eigenvalue formulation for
the general case where k spots are arbitrarily located within the domain.
Therefore, we will assume that the k spots are arranged to form certain
symmetric patterns. We define a spot pattern to be symmetric if and only if
the Green’s matrix G in (3.11) is circulant, which immediately implies that
the λ-dependent Green’s matrix Gλ in (4.10) is also a circulant matrix. With
this special structure, our coupled eigenvalue problem reduces to that given
in Principal Result 4.2. One special case where a circulant Green’s matrix
arises is when there are k-spots equally spaced on a ring that is concentric
with the unit disk.
4.5.1
A Symmetric Circulant Matrix
We assume that the k−spot pattern is symmetric. We denote the first row
of G by the row vector a = (a1 , . . . , ak ). Since G is circulant it follows that
all of the other rows of G can be obtained by rotating the components of
the vector a. In addition, since G is also necessarily a symmetric matrix it
follows that a2 = ak , a3 = ak−1 , . . ., and aj = ak+2−j for j = 2, . . . , [k/2].
Next, we calculate the eigenvectors and eigenvalues of the λ-dependent
Green’s matrix Gλ as needed in Principal Result 4.2. We recall that if a
matrix of size k × k is circulant, its eigenvectors Vj consist of the kth roots
of unity, given by
κj =
k−1
X
am+1 e2π(j−1)m/k ,
Vj = (1, e2π(j−1)/k , . . . , e2π(j−1)(k−1)/k )t .
m=0
Here κj is the eigenvalue of Gλ associated with Vj for j = 1, . . . , k, and am
is the mth component of the row vector a.
For illustration, let k = 3. Then, the eigenpairs are V1 = (1, 1, 1) with
κ1 = a1 + a2 + a3 , V2 = (1, e2πi/3 , e4πi/3 ) with κ2 = a1 + a2 e2πi/3 + a3 e4πi/3 ,
and V3 = (1, e4πi/3 , e2πi/3 ) with κ2 = a1 +a2 e4πi/3 +a3 e2πi/3 . Then, since the
matrix is also symmetric, we have a2 = a3 , so that the last two eigenvalues
are equal, i.e. κ2 = κ3 = a1 − a2 , yielding one eigenvalue with multiplicity 2.
Then, since any linear combination of V2 and V3 is also an eigenvector, we
take the real part of V2 as one such vector, and the imaginary part of V2 as
the other. In summary, we can take V1 = (1, 1, 1)t , V2 = (1, −0.5, −0.5)t and
136
4.5. Symmetric k−Spot Patterns in a Finite Domain
√
√
V3 = (0, 3/2, − 3/2)t as the three eigenvectors of Gλ for the symmetric
3-spot pattern.
In general, the symmetry of Gλ implies that aj = ak+2−j and Vj =
Vk+2−j , and Vjm = Vj(k+2−m) for m = 2, . . . , [k/2] and j = 2, . . . , [k/2].
Since the eigenvalue is κj = Vj · a, we have κj = κk+2−j . This generates
[k/2] − 1 eigenvalues with multiplicity 2, whose eigenvectors can be obtained
by taking any linear combination of two complex conjugate eigenvectors. For
instance, for the j th eigenvalue κj the corresponding two eigenvectors can
be taken as the real and imaginary parts of Vj , respectively. In summary,
we know that all of the eigenvectors can be chosen to be real, but the
eigenvalues in general will not be. This leads to the following general result
for the spectrum of a k × k symmetric and circulant matrix whose first row
vector is a = (a1 , . . . , am ):
P
κ1
= km=1 am , V1t = (1,. . . , 1),
P
m
κj
am+1 , eigenvalues with multiplicity 2,
= k−1
cos 2π(j−1)
k
m=0 2π(j−1)(k−1)
2π(j−1)
t
,
.
.
.
,
cos
,
V
=
1,
cos
j
k
k
V t
= 0, sin 2π(j−1) , . . . , sin 2π(j−1)(k−1)
, j = 2, . . . , [k/2] + 1 .
k+2−j
k
k
Pk
m−1 a
m
m=1 (−1)
(4.51)
is a simple eigen-
Note that if k is even, then κ[k/2]+1 =
value with eigenvector (1, −1, · · · , 1, −1)t .
For a symmetric spot pattern, we can simply substitute (4.51) into (4.11)
of Principal Result 4.2 and derive the eigenvalue problem associated with
the j th eigenvector Vj . This yields,
1 + νRe(B̂c ) + 2πν
k
X
Re(am )Vjm = 0 ,
(4.52a)
m=1
νIm(B̂c ) + 2πν
k
X
Im(am )Vjm = 0 ,
j = 1, . . . , [k/2] + 1 .
(4.52b)
m=1
Here the row vector a has components a1 = Rλ 11 , and am = Gλ 1m for
m = 2, . . . , k, where Gλ 1m and Rλ 11 are the λ-dependent Green’s function
and its regular part satisfying (4.5).
137
4.5. Symmetric k−Spot Patterns in a Finite Domain
4.5.2
A Ring of Spots in the Unit Disk
In this subsection, we assume that all k spots are equally spaced on a ring
of radius r concentric with the unit disk. The location of the spots are at
xj = re2πij/k ,
j = 1, . . . , k .
For this special arrangement of spot locations, the Green’s matrices G and
Gλ are both symmetric and circulant.
Our goal is to compute the Hopf bifurcation threshold τH as a function of
the ring radius r for various one-ring patterns, and to compare our stability
threshold results with those computed from full numerical computations of
the GS model (1.7).
Experiment 4.6: A two-spot solution in the unit disk: Dynamical oscillatory
profile instability and dynamical competition instability
Suppose that there are two spots equally spaced on a ring of radius r,
with 0 < r < 1, concentric with the unit disk. The equilibrium ring radii
for different values of D, representing the equilibrium point for the ODE in
Principal Result 3.3, are given in Table 4.1. These equilibria do not depend
on the values of A.
D
0.8
1.0
1.3
1.5
re
0.45779
0.45703
0.45630
0.45596
D
2.0
3.0
4.0
5.0
re
0.45540
0.45483
0.45454
0.45436
Table 4.1: Equilibrium ring radius re for a two-spot symmetric pattern in
the unit disk for different values of D.
In Fig. 4.11, we fix the feed-rate parameter at A = 0.26, and denote by
the solid curve the Hopf bifurcation threshold τH with V1 = (1, 1)t . The
dotted segment is the portion of this curve where a competition instability
occurs. In Fig. 4.11(a) we plot τH versus r for D = 0.8, 1.0, 1.3, 1.5, and
in Fig. 4.11(b), we plot τH versus r for D = 2, 3, 4, 5. At r = 0.45, the
lowest curve corresponds to the largest value of D. We conclude that for
D ≥ 2, there could be a dynamical oscillatory profile instability for a twospot symmetric pattern with A = 0.26. Another observation is that for
D = 5, a competition instability occurs when r ≈ 0.568. Upon recalling
from Table 4.1 that the equilibrium ring radius is re = 0.455, we conclude
that there could be a dynamical competition instability. To illustrate this,
138
4.5. Symmetric k−Spot Patterns in a Finite Domain
let D = 5 and τ = 1 and suppose that we have an initial two-spot symmetric
pattern with initial value r = 0.7 at t = 0. Then, as the two spots move
toward each other, a dynamical competition instability will be triggered
before the ring reaches its equilibrium ring radius at re ≈ 0.455.
35
80
70
30
60
25
50
τ
τ
20
40
15
30
10
20
5
10
0
0
0
0.1
0.2
0.3
0.4
0.5
0.6
r
(a) τH vs. r
0.7
0.8
0.9
1
0
0.1
0.2
0.3
0.4
0.5
0.6
r
(b) τH vs. r
0.7
0.8
0.9
1
Figure 4.11: Experiment 4.6: Two spots in the unit disk. (a) Fix A = 0.26.
We plot τH vs. r for small values of D = 0.8, 1.0, 1.3, 1.5, with the lower
curves corresponding to smaller values of D. The solid curves correspond
to regions in r where an oscillatory profile instability occurs, and the dotted
portions of these curves correspond to where a competition instability occurs.
(b) τH vs. r for the larger values of D given by D = 2, 3, 4, 5. The lower
curves at r = 0.6 correspond to larger values of D.
Next we fix A = 0.26 and D = 3. In Fig. 4.12(a) we plot the Hopf bifurcation thresholds τH1 for in-phase oscillation (1, 1) (lower solid curve) and
τH2 for out-of-phase oscillation (1, −1) (upper solid curve). The dotted portion on τH1 shows where a competition instability occurs for any τ ≥ 0. In
Fig. 4.12(b), we fix two spots on the equilibrium ring of radius re = 0.45483,
and we plot the path of the complex conjugate pair of eigenvalues in the
complex plane for the range τ ∈ [3.7, 36]. The solid curve is the eigenvalue
path for in-phase oscillations with eigenvector (1, 1), while the dotted curve
is the eigenvalue path for out-of-phase oscillations with eigenvector (1, −1).
We note that as τ increases, the real parts of both pairs of eigenvalues increase. The eigenvalue for (1, 1) enters the right half-plane at τ ≈ 11.5.
Note that the imaginary eigenvalue of (1, −1) becomes very close to the real
axis for τ < 3.7, and our numerical computation breaks down because our
assumption that λr = 0, λi 6= 0 does not hold in this case.
139
4.5. Symmetric k−Spot Patterns in a Finite Domain
90
1
0.8
80
0.6
τ increasing
70
0.4
Im λ
τH
60
50
0.2
0
-0.2
40
-0.4
30
-0.6
20
-0.8
10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
-1
-0.35
1
-0.3
r
(a) τH vs. r
Re λ
(b) Im(λ) vs. Re(λ)
-0.25
-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
Figure 4.12: Experiment 4.6: Two spots in the unit disk. Fix A = 0.26
and D = 3. (a) τH vs. r for in-phase oscillation (1, 1) (lower solid curve),
and τH2 for out-of-phase oscillation (1, −1) (upper solid curve). The dotted
portions on τH1 show where a competition instability occurs for any tau ≥ 0.
(b) Two spots equally spaced on an equilibrium ring of radius re = 0.45483.
Plot of λ in the complex plane on the range τ ∈ [3.7, 36]. The solid curve is
for (1, 1), while the dotted curve is for (1, −1).
8
0.4
7
0.3
0.2
6
0.1
Im λ
D
5
4
0
-0.1
3.3
-0.2
2
-0.3
1.16
0.2
0.3
0.4
0.5
0.6
0.7
r
(a) Dc vs. r
0.8
0.9
1
-0.4
-0.1
-0.05
Re λ
(b) Im(λ) vs. Re(λ)
0
0.05
0.1
0.15
0.2
0.25
Figure 4.13: Experiment 4.7: Two spots in the unit disk. Fix A = 0.26 and
ε = 0.02 (a) Plot of Dc vs. r (solid curve), where Dc is the critical value of
D at which a competition instability is initiated. The region 1.1583 < D <
3.3030 between the two horizontal lines is where the leading-order NLEP
theory predicts that no competition instability occurs. (b) For τ = 30 and
r = 0.3, plot the spectrum in the complex plane by varying D in the range
[0.8, 3]. The solid curve corresponds to the eigenvalues with (1, −1), and the
dotted curve corresponds to the eigenvalues with (1, 1). The arrows show the
path as D increases.
140
4.5. Symmetric k−Spot Patterns in a Finite Domain
Experiment 4.7: A two-spot solution in unit disk: Competition instability
Fix ε = 0.02, A = 0.26. In Theorem 2.3 of [101], as summarized in
Section 4.2.2, the leading order NLEP analysis proves that if D = O(ν −1 )
− − of (4.2.2) is stable for any
0
and L0 < (2η0η+k)
2 , then the small solution u , v
τ sufficiently small. In addition, the leading-order NLEP theory predicts
0
that if L0 > (2η0η+k)
2 , then this solution is unstable for any τ > 0. From
|Ω|
0
(4.20), we recall that L0 = limε→0 εA2πb
2 |Ω| and η0 = limε→0 2πDν , where
R∞ 2
b0 = 0 w ρ dρ ≈ 4.9347 and w is the ground-state solution of (4.14). With
|Ω| = π and ν = −1/ ln ε, and for the other parameter values as given,
this stability bound yields 0.296 < Dν < 0.844, or equivalently 1.158 <
D < 3.303. For this range of D, the leading order NLEP theory predicts
that the solution u− , v − is stable for τ sufficiently small. Outside of this
bound for D, the leading-order NLEP theory predicts that a competition
instability.occurs for any τ > 0.
We fix ε = 0.02 and A = 0.26. In Fig. 4.13(a), we plot Dc vs. r by the
solid curve, where Dc denotes the critical value of D where a competition
instability is initiated. To the left of this curve, oriented with respect to the
direction of increasing D, we predict that a competition instability occurs
for any τ > 0, while to the right of this curve we predict that the solution
is stable when τ is small enough. The two horizontal dotted lines with
D1 = 1.158 and D2 = 3.303 in this figure bound a region of stability as
predicted by the leading-order NLEP theory of [101]. The leading-order
in ν prediction from NLEP theory does not capture the dependence of the
stability threshold on the ring radius r. Our stability formulation, which
accounts for all orders in ν = −1/ ln ε, shows that Dc = Dc (r). For ε = 0.02,
ν is certainly not very small, and this dependence of the threshold on r, not
accounted for by NLEP theory, is indeed very significant.
In Fig. 4.13(b), for A = 0.26, τ = 30, and r = 0.3, we plot the spectrum
in the complex plane as D varies over the range [0.8, 3.0]. This range of D
corresponds to taking a vertical slice at r = 0.3 in Fig. 4.13(a) that cuts
across the stability boundary at two values of D. The arrows in this figure
indicate the direction of the path of eigenvalues as D is increased. The
loop of spectra, corresponding to the solid curves in this figure, plot the
eigenvalues associated with the eigenvector (1, −1). From Fig. 4.13(a) we
predict instability when D is near D = 0.8 or when D is near D = 3.0. This
is clearly shown by the behavior of the closed loop of spectra in Fig. 4.13(b).
With regards to the loop of spectra (solid curves) in Fig. 4.13(b) asso2
141
4.5. Symmetric k−Spot Patterns in a Finite Domain
ciated with the (1, −1) eigenvector, our results show that for D = 0.8 the
eigenvalue is on the positive real axis at λ = (0.218, 0). As D is increased
above D = 0.8 the real eigenvalue moves along the horizontal axis to the left,
and splits into a complex conjugate pair at D ≈ 0.84. At D = 0.84, then
λ = (0.111, 0), while at D = 0.85 then λ = (0.0649, 0.0322). For D ≈ 1.0,
λ enters the stable left half-plane Re(λ) < 0. For D = 2.89 the eigenvalues
merge onto the negative real axis. One eigenvalue then enters the right halfplane at D ≈ 2.95. This is the value of D where a competition instability is
initiated. For D > 2.95, there is a positive real eigenvalue associated with
the (1, −1) eigenvector, which generates a competition instability.
Alternatively, the dotted curves in Fig. 4.13(b) correspond to the path of
eigenvalues associated with the (1, 1) eigenvector, representing synchronous
instabilities. This path depends sensitively on the value chosen for τ . For
τ = 30, our computational results show that as D is increased above D = 0.8,
the real part of these eigenvalues first starts to decrease and then crosses
into the stable left half-plane at D ≈ 1.33. The real part of these eigenvalues
starts increasing when D ≈ 1.59 and the path then re-enters the unstable
right half-plane at D = 1.89 where stability is lost at a Hopf bifurcation
corresponding to synchronous oscillations of the two spot amplitudes. This
path of eigenvalues remain in the unstable right half-plane for D > 1.89.
We conclude that if 1.33 < D < 1.89, this two-spot symmetric pattern is
stable to both competition and synchronous oscillatory instabilities. When
D > 2.95 there is an unstable real eigenvalue in the right half-plane associated with a competition instability in addition to a synchronous oscillatory
instability associated with the complex conjugate pair of eigenvalues. On
the range 1.89 < D < 2.95 there is only a synchronous oscillatory instability. We remark that if τ is taken to be considerably smaller than our chosen
value of τ = 30, there would be only one unstable eigenvalue in Re(λ) > 0
(located on the positive real axis) when D > 2.95.
We set A = 0.26, D = 3, τ = 30, and consider an initial two-spot symmetric pattern with ring radius r = 0.3. With these parameter values and
initial condition, in Fig. 4.14 we show results from a full numerical simulation of the GS model (1.7) at later times. For these parameter values, we
conclude from Fig. 4.13(b) that there is an unstable real eigenvalue together
with an unstable complex conjugate pair of eigenvalues. We remark that
since we use the finite element method, the locations of the two spots is not
exactly symmetric, which has essentially a similar effect to adding a small
perturbation to the initial condition to initiate an instability. For the left
spot, its amplitude is initially vm1 ≈ 37.5, while the initial amplitude of the
right spot is vm2 ≈ 40.1. From the full numerical results shown in Fig. 4.14
142
4.5. Symmetric k−Spot Patterns in a Finite Domain
1
1
1
1
0.8
0.8
0.8
0.8
0.6
0.6
0.6
0.6
0.4
0.4
0.4
0.4
0.2
0.2
0.2
0.2
0
0
0
0
-0.2
-0.2
-0.2
-0.2
-0.4
-0.4
-0.4
-0.4
-0.6
-0.6
-0.8
40
35
30
25
20
15
10
5
0
-1
-1
-0.5
0
0.5
1
-0.6
-0.8
50
45
40
35
30
25
20
15
10
5
0
-1
-1
-0.5
0
0.5
1
-0.6
-0.8
60
50
40
30
20
10
0
-1
-1
-0.5
0
0.5
1
-0.8
50
45
40
35
30
25
20
15
10
5
0
-1
-1
-0.5
0
0.5
1
Figure 4.14: Experiment 4.7: We fix D = 3.0, A = 0.26, τ = 30, and
ε = 0.02. The initial condition is a symmetric two-spot pattern on a ring of
radius 0.3. The solution v is plotted at times t = 0.5, 8, 10, 15, respectively.
The spot on the left is rather quickly annihilated.
at t = 0.5, 8, 10, 15, we observe that the amplitude of the left spot decays
with time, and this spot disappears after t = 15.
In Fig. 4.15 we plot the amplitude of the two spots. The amplitude vm1
vs. t of the left spot is shown by the dot-dashed curve, while the amplitude
vm2 vs. t of the right spot is shown by the solid curve. These amplitudes were
obtained by tracking the locations of spots in the numerical simulation at
each time step. The amplitude of the left spot decays rapidly to zero before
t = 13. Meanwhile, the amplitude of the right spot begins to oscillate,
but the oscillation ceases after the left spot is annihilated. This is because
after the left spot has been removed, the value τ = 30 is below the Hopf
bifurcation value for a one-spot solution.
Experiment 4.8: A two-spot solution in the unit disk: Phase diagram for
different diffusion coefficients D
In Experiment 4.8, we plot the phase diagram A vs. r for different
diffusion coefficients D. In Fig. 4.16, we plot the existence threshold Af for
a two-spot quasi-equilibrium solution by the solid curve. The critical value
of A for the competition instability is shown by the dotted curve, and the
peanut-splitting threshold A2 by the upper heavy solid curve. The solution
behavior in the four different parameter regimes in this figure is as follows.
In Regime σ the quasi-equilibrium solution does not exist. In Regime β
the quasi-equilibrium solution exists but is unstable to competition. In
Regime ζ the solution is unstable to an oscillatory profile instability when τ
exceeds a Hopf bifurcation threshold τH . In region θ the solution is unstable
to peanut-splitting. The subfigures from left to right are plotted for: (a)
D = 0.2; (b) D = 1; (c) D = 5. Note that when D = 0.2 ≪ 1, the
subfigure is qualitatively similar to the phase diagram shown in Fig. 4.5(a)
143
4.5. Symmetric k−Spot Patterns in a Finite Domain
70
60
50
vm
40
30
20
10
0
0
5
10
15
t
20
25
30
35
(a) vm vs. t
Figure 4.15: Experiment 4.7: Two spots in the unit disk. Fix ε = 0.02, A =
0.26, D = 3, and τ = 20. The dot-dashed curve plots the amplitude of the
left spot vm1 vs. t., the solid curve plots the amplitude of the right spot vm1
vs. t.
for a two-spot solution in the infinite plane.
Experiment 4.9 k-spot solution with k > 2 in the unit disk: Phase diagram
Finally, we compute the stability phase diagram associated with k-spots
that are equally spaced on a ring of radius r. We fix D = 0.2 and ε = 0.02
and plot this phase diagram in the parameter plane A versus the ring radius
r for k = 2, 4, 8, 16. We are particularly interested in determining if there
exists k−spot pattern with fixed parameters D and ε such that the peanutsplitting regime for k−spots intersects the competition regime for a pattern
with 2k-spots. If this occurs then it would be possible that a k−spot pattern
undergoes peanut-splitting first, followed by a competition instability with
2k spots, leading to the annihilation of k of them, with the cycle of selfreplication followed by self-destruction repeating again.
We assume that all k spots are equally distributed on a ring of radius
r. Then using the techniques in Section 4.5.1 it follows readily that for
2k = 4, the eigenvectors are V1 = (1, 1, 1, 1)t , V2 = (1, −1, 1, −1)t , V3 =
(1, 0, −1, 0)t and V4 = (0, 1, 0, −1)t . Note that the last three of these vectors
have components with different signs. Moreover, the computational results
show that the competition instability threshold associated with V2 is always
above that of V3 or V4 , and so it has a larger competition instability regime
in the phase diagram, and this instability occurs more readily than with V3
144
4.6. Discussion
0.85
0.7
0.8
0.65
0.75
0.6
θ
0.7
1
θ
0.9
θ
0.8
0.55
0.7
0.65
0.5
ζ
0.55
0.45
0.4
ζ
0.5
0.5
ζ
0.4
0.35
0.45
0.4
A
A
A
0.6
0.6
0.3
0.3
β
0.35
0.1
β
0.25
σ
0.2
0.2
0.3
0.4
0.5
r
0.6
0.7
0.8
0.9
(a) D = 0.2
0.1
β
0.2
σ
σ
0.1
0.2
0.3
0.4
0.5
r
0.6
(b) D = 1.0
0.7
0.8
0.9
0.1
0.2
0.3
0.4
0.5
r
0.6
0.7
0.8
0.9
(c) D = 5.0
Figure 4.16: Experiment 4.8: Two spots in the unit disk. We plot the phase
diagram A vs. r. The solid curve is the existence threshold Af for a two-spot
quasi-equilibrium solution; the dotted curve is the critical value for a competition instability; the heavy solid-curve is the peanut-splitting threshold A2 .
Regime σ: no solution; Regime β: the quasi-equilibrium solution is unstable
to competition; Regime ζ the solution is unstable to a profile oscillation if
τ > τH (r); Regime θ: the solution is unstable to peanut-splitting. Subfigures
from left to right are plotted for: (a) D = 0.2; (b) D = 1; (c) D = 5.
and V4 . The profile oscillatory instability occurs first as τ is increased for
the eigenvector V1 . Similarly for k = 8, 16, the instability with eigenvector of
the form V = (1, −1, 1, −1, . . . , 1, −1)t is always the dominant competition
mechanism. Therefore for 2k−spot equally distributed on a ring, if the
competition instability does occur, it will lead to the annihilation of one of
the two adjacent spots. For 2k even, half the total number of total spots
will disappear leaving a k−spot pattern.
In Fig. 4.17, we plot the phase diagram in the A versus r plane for
k = 2, 4, 8, 16. The computations are done for the fixed value D = 0.2.
The thin solid curves on the bottom is the existence threshold Af for a
quasi-equilibrium solution; the dotted curves are the critical value of A for
a competition instability, and the heavy solid curves on top are the peanutsplitting threshold A2 . In Regime σ the quasi-equilibrium solution does not
exist. Regime β is where the quasi-equilibrium solution exists but is unstable
to competition. In Regime ζ the solution is unstable to profile oscillation if
τ > τH (r). In Regime θ there is instability to peanut-splitting.
4.6
Discussion
In this chapter, we formulated an eigenvalue problem associated with instabilities in the amplitudes of spots. This eigenvalue problem, associated
with locally radially symmetric perturbations, differs from the eigenvalue
145
4.6. Discussion
0.85
1.3
0.8
1.2
0.75
1.1
θ
0.7
A
A
0.9
0.6
0.55
0.8
0.7
ζ
0.5
ζ
0.6
0.45
0.4
θ
1
0.65
β
0.5
β
0.4
σ
0.35
0.1
σ
0.3
0.2
0.3
0.4
0.5
r
(a) k = 2
0.6
0.7
0.8
0.9
0.1
2.5
5.5
2
4.5
0.2
0.3
0.4
0.5
r
(b) k = 4
0.6
0.7
0.8
0.9
0.7
0.8
0.9
5
θ
4
1.5
3.5
A
A
β
1
θ
3
2.5
ζ
2
0.5
β
1.5
σ
ζ
1
0
0.5
0.1
0.2
0.3
0.4
0.5
r
(c) k = 8
0.6
0.7
0.8
0.9
0.1
0.2
0.3
0.4
0.5
σ
r
(d) k = 16
0.6
Figure 4.17: Experiment 4.9: Symmetric k-spot pattern in the unit disk. We
plot the phase diagram A vs. r with D = 0.2. The thin solid curves are the
existence threshold Af for the quasi-equilibrium; the dotted curves are the
critical values of A for a competition instability; the heavy solid curves is
the peanut-splitting threshold A2 . In Regime σ the quasi-equilibrium solution does not exist. In Regime β the quasi-equilibrium solution exists but
is unstable to competition. In Regime ζ the solution is unstable to a profile oscillation if τ exceeds a Hopf bifurcation threshold τH (r) In Regime θ
the solution is unstable to peanut-splitting. Subfigures from left to right are
plotted for: (a) k = 2; (b) k = 4; (c) k = 8; (d) k = 16.
146
4.6. Discussion
problem of Chapter 3 in that the local eigenfunction Nj (ρ) grows logarithmically as ρ → ∞. This logarithmic growth has the effect of introducing a
strong inter-spot coupling effect in the formulation of our eigenvalue problem governing spot amplitude instabilities. If in the complex λ-plane a real
eigenvalue crosses into the unstable right half-plane Re(λ) > 0 along the real
axis, then a competition instability is initiated. Alternatively, if there is a
complex conjugate pair of eigenvalues entering the unstable right half-plane
through a Hopf bifurcation then an oscillatory profile instability is initiated.
By numerically computing discrete eigenvalues of the eigenvalue problem
(4.8) and (4.10a) using the algorithms in §4.1.1, we are able to calculate
both the Hopf bifurcation threshold and the critical parameter values for
a competition instability. These computations allow us to plot phase diagrams in parameter space where the three different types of instabilities can
occur. These instabilities are spot self-replication, an oscillatory instability
in the spot amplitudes, and a competition instability of the spot amplitudes.
These phase diagrams are plotted for various spatial configuration of spot
patterns and for both finite and infinite domains.
There are several open problems that warrant investigation. One such
problem is to derive the correction term to the leading-order NLEP theory in §4.2 to more accurately determine the threshold parameter values
for spot stability in terms of the spatial configuration of spots. A second
open problem is to consider a weakly nonlinear analysis around a multi-spot
quasi-equilibrium solution for parameter values near the onset of either an
oscillatory profile instability or a competition instability. With such a weakly
nonlinear theory one could determine whether the oscillatory instability is
subcritical or supercritical, and one could characterize in more detail a spot
competition process in the weakly nonlinear regime. A third open problem
is to investigate the stability thresholds associated with other, less symmetric, configurations of spots such as for the case of k − 1 spots on a ring and a
spot at center of the unit disk or the case of two spots arbitrarily spaced in
a domain. Finally, the most interesting open problem is to try to determine
a parameter range where a spot-replication \ spot-annihilation “loop” could
occur. Such an attractor would consist of a continuously evolving pattern
of self-organized spots undergoing repeated cycles of spot self-replication
followed by spot-annihilation due to overcrowding instabilities.
147
Chapter 5
Conclusions and Future
Work
5.1
Conclusions
In this thesis, we have presented results on the dynamics and instabilities of
one-dimensional spike patterns and two-dimensional spot patterns in different parameter regimes for the Gray-Scott model, based on a combination of
asymptotic and numerical methods.
With regards to the one-dimensional Gray-Scott model in the semistrong interaction regime D = O(1), we have focused on analyzing two types
of oscillatory instabilities of multi-spike patterns in a finite domain, identifed
in the intermediate feed rate regime O(1) ≪ A ≪ O(ε−1/2 ). The oscillatory
profile instability resulting from a Hopf bifurcation of the large eigenvalues
occurs in fast time t, with the spikes evolving on the slow time σ = ε2 A2 t in
(2.12b). Therefore, we formulated a nonlocal eigenvalue problem (2.38) associated with the profile instability, based on the quasi-equilibrium solution
obtained by freezing the locations of spikes. The threshold τh = O(A4 ) for
the Hopf bifurcation can be calculated explicitly by Principal Results 2.4,
with the threshold depending on the instantaneous configuration of spikes
in the interval. In contrast, the oscillatory drift instability resulting from
a Hopf bifurcation of the small eigenvalue occurs on the slow time-scale
σ. For this problem, we derive and compute solutions to a Stefan-type
problem (2.12) with a moving singular source. This formulation allows us
to study the behavior of multi-spike pattern away from bifurcation point
τtw = O(ε−2 A−2 ) in (2.59). In particular, in Fig. 2.4(c) we have computed a large-scale oscillation in the location of the spike. According to
the scalings of these two thresholds, we identified two subregimes: when
O(1) ≪ A ≪ O(ε−1/3 ), τh ≪ τtw , the oscillatory profile instability dominates; when O(ε−1/3 ) ≪ A ≪ O(ε−1/2 ), τtw ≪ τh , the oscillatory drift
instability dominates. Therefore, in the semi-strong interaction regime, and
with the feed rate A increasing, the primary instability mechanisms of multi148
5.1. Conclusions
spike patterns are respectively in order: competition instability, oscillatory
profile instability (τ > τh ), oscillatory drift instability (τ > τtw ) and then
finally, pulse-splitting.
An open problem here is to compute the long time evolution of the
oscillatory drift solutions based on the integro-differential equation (2.78),
by using a numerical method similar to that used in [76] for a related,
but considerably simpler, integro-differential flame-front equation. It is of
interest to determine if the spike trajectories can exhibit similar chaotic
behavior as was observed in the flame-front model of [76].
For the Gray-Scott model in a two-dimensional domain in the semistrong interaction regime D = O(1), we construct the quasi-equilibrium spot
patterns by matched asymptotic analysis, and derive a DAE system (3.35)
governing the dynamics of a collection of spots. An existence condition
A > Af = O(ε(− ln ε)1/2 ) for the quasi-equilibrium multi-spot solution is
required, as a result of a saddle node bifurcation of the parameter A in
(3.8). The asymptotic and numerical investigation of the eigenvalue problem
(3.23) corresponding to different instability types has shown that, in the
limit A = O(ε(− ln ε)1/2 ), competition and oscillatory profile instabilities
can both occur. This regime is similar to the low-feed rate regime for onedimemsional spike patterns. If the feed rate is increased to A = O(ε(− ln ε)),
the multi-spot pattern can be unstable to self-replication, which leads to
the creation of more spots. Spot-replication criteria have been explicitly
calculated in §3.2 in terms of the source strength Sj for each spot, with
Σ2 ≈ 4.31, Σ3 ≈ 5.44, and Σ4 ≈ 6.14. Recall that in §3.1, there exists
a critical value Sv ≈ 4.78 such that if Sj > Sv , the radially symmetric
solution V (ρ) develops a volcano shape, as shown in Fig. 3.1(c). For example,
given a large enough feed rate, if the source strength of j th spot satisfies
Σ4 > Sj > Σ3 > Sv , it would first expand and form a ring shape, and
then break up into three spots, which is similar to the breakup instability
discussed in [57] in the same semistrong interaction regime D = O(1) with
larger feed rate A.
In [57], the stability of stripe and ring patterns with respect to zigzag
and breakup instabilities was studied. In the regimes O(ε1/2 ) ≪ A ≪
O(1) and A = O(1), equilibrium solutions of homoclinic stripes and rings
exist. For these solutions, it was shown that a band of unstable modes
always occurs for both breakup and zigzag instabilities. These instabilities
cannot be prevented unless the domain is with O(ε) ≪ O(1) thin. Note that
the unstable bands for zigzag and breakup instabilities overlap in a way
that a zigzag instability is always accompanied by a breakup instability.
149
5.1. Conclusions
Therefore, a ring or stripe pattern always breaks up and leads to a spot
pattern. Such spot patterns have much better stability properties. Similar
to the one-dimensional case, we can categorize the equilibrium solutions
and instability mechanism in terms of an ascending feed-rate parameter A
as follows competition of spots, profile oscillation of spots (τ > τh ), selfreplication of spots, breakup of stripes or rings and zigzag instability of
stripes or rings. One remark is that while the first two instabilities reduce
the number of spots, spot-replication creates more spots. Moreover, if A ≫
O(ε1/2 ), the equilibrium solution could be ring or stripe, although they are
unstable to modes of a certain wavenumber associated with breakup and
zigzag instabilities. This result agrees with our intuition from FIS reaction
that with the reagents fed in a high rate, there would be more spots as
a results of more intense reaction, and there would be a threshold above
which larger localized regions such as stripes or rings could be formed from
coagulation of spots.
In contrast, in the weak interaction regime D = O(ε2 ), both u and v are
localized variables, stripes and rings can be unstable to a zigzag instability
without undergoing breakup instability. As a result, a labyrinth pattern
can be generated in this regime. Numerical studies in [57] has shown that
patterns in this regime depend very sensitively on the parameters, with
spots, rings, stripes and labyrinths being formed through zigzag, breakup or
spot-splitting instabilities.
One open problem in two-dimensional Gray-Scott model is to compute
the equilibrium bifurcation diagram for multi-spot pattern in a finite domain. Multiple equilibrium locations are possible by calculating x′j (t) =
0, j = 1, · · · , k in (3.35). For each steady-state, we could try to determine
the set of initial conditions leading to long-time behavior that approaches
this state. This basin of attraction problem is an interesting open question.
Another problem is to identify a parameter range where a spot-replication \
spot-annihilation “loop” could occur. Since this continuous process of spot
birth by replication and death by competition has been observed numerically in the weak interaction regime D = O(ε2 ) in [77]. Therefore, it would
be interesting to determine whether it can be found, largely based on analytical results, in the regime O(ε2 ) ≪ D ≪ O(1), by using results for the
instability thresholds of spot-replication, competition and profile oscillation,
for two-particle interactions. Finally, it would be interesting to study small
eigenvalue instabilities associated with the motion of spots. In particular,
what instability would occur if there are too many spots on one ring? Is
there a Stefan-type problem similar to the one-dimensional case for some
range of τ and A?
150
5.2. Application to Other Systems
A long term goal is to investigate generic types of instabilities of particlelike solutions to reaction-diffusion systems that have non-variational structure. We would also like to derive conditions on the kinetic F (A, H) and
G(A, H) for a general two-component reaction-diffusion model (1.1). In the
next section, we propose a few projects as potential future work.
5.2
Application to Other Systems
It should be possible to apply our theoretical framework used for the twodimensional GS model to other reaction-diffusion systems that have numerically been shown to exhibit spot self-replication phenomena. We anticipate
that our theoretical approach will still be useful in a wide context, but may
have to be tailored to each particular new RD model. We now propose a
few examples of possible future work in this direction.
5.2.1
Localized Patterns in Cardiovascular Calcification
Yochelis et. al.(cf. [105]) have recently modeled cardiovascular calcification
by a Gierer-Mainhardt (GM) type system with saturated autocatalytic kinetics for the activator and an inhibition source term S. In dimensionless
form this model is
ut = D∆u − u +
u2 v −1
,
1 + u2
vt = ∆v − Ev + S + Gu2 ,
(5.1)
where D = 0.005, G = 1, E = 2, and the constant inhibition source S is the
control parameter.
This problem is motivated by the results of in vitro experiments that
vascular-derived mesenchymal stem cells can display self-organized calcified
patterns such as labyrinths and spots. In these experiments, the bone morphogenetic protein 2 (BMP-2) acts as an activator, and the matrix GLA
protein (MGP) acts as the inhibitor, which can be altered by external addition of MGP. In [105], a spatial dynamics approach together with numerical
continuation was used to identify the primary instabilities and possible stable and unstable one-dimensional solution branches as a function of the
inhibition source S. Then these results were extended to calculate the secondary instabilities and the parameter regions in S in which two-dimensional
patterns, such as labyrinths, spots, stripes and mixtures of spots and stripes,
can form. It has been shown numerically that labyrinthine patterns arise
at lower concentrations of added MGP (corresponding to small S values),
while a higher MGP concentration (larger S values) leads to spot patterns.
151
5.2. Application to Other Systems
It would be very interesting to develop an analytical theory for the dynamics and different types of instabilities of such localized patterns by an
asymptotic method that is valid in the limit D ≪ O(1). With regards to the
spot self-replication instability, the mechanism for this instability is likely
to be essentially similar to that for the GS model, as studied in Chapter
3 of this thesis. Such a study would allow for a theoretical understanding
of the different types of localized patterns in the GM model (5.1), and to
determine the parameter range of the inhibition source S that leads to the
formation of calcified patterns.
5.2.2
The Brusselator Model with Superdiffusion
Golovin et. al. [34] have studied the effect of superdiffusion on pattern formation in a generalized Brusselator model, formulated as
B
ut = ∇α u + (B − 1)u − U 3 + Q2 v + u2 + 2Quv + u2 v , (5.2a)
Q
B
(5.2b)
η 2 vt = ∇β v − Bu − Q2 v − u2 − 2Quv − u2 v .
Q
Here the superdiffusion term ∇β is defined by its action in Fourier space
F[∇β ](k = −|k|β F[u](k). Different from normal diffusion that describes
the random walk of molecules, superdiffusion models molecules that have a
jump size distribution with infinite moments. Superdiffusive processes are
common in plasma and turbulent flows, in surface diffusion, and in diffusion in porous media with fluid flow etc. In [34], a linear stability analysis
has shown that a Turing instability can occur even when the diffusion of
the inhibitor is slower than that of the activator. A set of coupled amplitude equations was formulated from a weakly nonlinear analysis, which
determined the selected hexagonal and striped patterns and their stability. Moreover, these theoretical results were confirmed by full numerical
simulations near stability boundaries. In the computation, a new pattern,
involving self replicating spots not described by the analysis, was observed
in the parameter region where hexagons and stripes are unstable. It would
be interesting to try to extend our theoretical framework developed for the
GS model to investigate the self-replicating spot patterns observed in the
numerical computations of [34] for (5.2).
5.2.3
A Three-Component Reaction-Diffusion System
It would also be interesting to consider three-component reaction-diffusion
systems, which presumably allow for more complex spatio-temporal patterns
152
5.2. Application to Other Systems
than for two-component systems such as the GS or GM models. One such
system was initially introduced by Schenk et. al. [80] to model a planar
semiconductor gas-discharge system. The dimensionless system is
Ut = ∆U + U − U 3 − ε(αV + βW + γ) ,
1
τ Vt = 2 ∆V + U − V ,
ε
D2
θWt =
∆W + U − W .
ε2
(5.3a)
(5.3b)
(5.3c)
Here 0 < ε ≪ 1, τ > 0, θ ≪ ε−3 , and α, β, γ are O(1) constants. This
system has two inhibitors V and W with fast diffusivities, which differ only
in their reaction-time constants and diffusion scale. The activator U is only
weakly coupled at O(ε) to V and W .
In [5], the laboratory experiments on a planar gas discharge device have
shown the occurrence of birth, death, and scattering of multiple spots in
different parameter regimes. This three-component model (5.3) has been
mostly studied by numerical simulations, and the dynamics exhibited by the
localized patterns agree qualitatively with those seen in actual experiments.
There has been some theoretical work for (5.3) for the case of a onedimensional spatial domain. Doelman et. al. have investigated the existence (cf. [23]) and stability (cf. [37]) of pulse and front patterns in the
one-dimensional case, and they have developed an approach by which the
existence and stability of front or pulse patterns of 3-component system can
be established. Theses studies [23], [37] have provided a detailed mathematical analysis and obtained explicit results for various types of bifurcations such as saddle-node bifurcations and Hopf bifurcations, which result in
breathing oscillations. However, there has been no comprehensive analysis
for (5.3) in a two-dimensional spatial domain. It would be interesting to
extend our basic approach for the GS model to asymptotically study the existence of spot solutions, the dynamics of spots (spot scattering), and their
various instabilities. Based on the instabilities observed from [5], we anticipate that there will be two types of instabilities; a spot-splitting instability
(spot birth) and a competition instability (spot death).
5.2.4
A General Class of Reaction-Diffusion Models
An interesting extension of this thesis would be to extend the analysis to
consider localized spot patterns arising in a class of singularly perturbed
reaction-diffusion models in a two-dimensional domain. For the case of a onedimensional spatial domain, Doelman and Kaper (cf. [20]) have developed
153
5.2. Application to Other Systems
theories for the stability and dynamics of pulse solutions in the semi-strong
interaction limit for a class of singularly perturbed RD system. By adopting
the theoretical framework of this thesis it should be possible to extend the
results of [20] to the case of spot patterns in a two-dimensional domain. The
goal of this analysis would be to find certain criteria on the reaction kinetics
that lead to different instability mechanisms of localized spot solutions, and
to plot the phase diagram in parameter space where such instabilities could
occur.
154
Bibliography
[1] E. Anderson et al. (1999), LAPACK User’s Guide: Third Edition, SIAM
Publications.
[2] U. Ascher, R. Christiansen and R. Russell (1979), Collocation Software
for Boundary Value ODE’s, Math. Comp. 33, pp. 659–679.
[3] Y. Astrov, E. Ammelta, S. Teperickb and H. Purwins (1996), Hexagon
and stripe Turing structures in a gas discharge system, Phys. Lett. A
211, pp. 184–190.
[4] Y. Astrov and H. Purwins (2001), Plasma spots in a gas discharge system: birth, scattering and formation of molecules, Phys. Lett. A 283,
pp. 349–354.
[5] Y. Astrov and H. Purwins (2006), Spontaneous division of dissipative
solitons in a planar gas-discharge system with high ohmic electrode, Phys.
Lett. A 358, pp. 404–408.
[6] R. P. Beyer and R. J. Leveque (1992), Analysis of a one-dimensional
model for the immersed boundary method, SIAM J. Numer. Anal. 29
(2), pp. 332–364.
[7] J. G. Blom, R.A.Trompert and J.G.Verwer (1996), Algorithm 758:
VLUGR 2: A vectorizable adaptive grid solver for PDEs in 2D, ACM
Trans, Math. Softw. 22 (3), pp. 302–328.
[8] J. G. Blom and P. A. Zegeling (1994), Algorithm 731: a moving-grid
interface for systems of one-dimensional time-dependent partial differential equations, ACM Trans. Math. Software, 20 (2), pp. 194–214.
[9] J. Carr (1981), Applications of center manifold theory, Springer-Verlag,
New York, Heidelberg, Berlin.
[10] W. Chen and M. J. Ward (2009), Oscillatory instabilities and dynamics
of multi-spike patterns for the one-dimensional Gray-Scott model, Euro.
J. Appl. Math 20 (2), pp. 187–214.
155
Chapter 5. Bibliography
[11] W. Chen and M. J. Ward (2009), Self-replication of spot patterns for
the two-dimensional Gray-Scott model, submitted to SIAM J. Appl. Dyn.
Syst.
[12] W. Chen and M. J. Ward (2009), Competition and oscillatory profile
instabilities of spot patterns for the two-dimensional Gray-Scott model,
submitted to SIAM J. Appl. Dyn. Syst.
[13] X. Chen and M. Kowalczyk (2001), Dynamics of an interior spike in
the Gierer-Meinhardt system, SIAM J. Math. Anal. 33 (1), pp. 172–193.
[14] M. C. Cross and P. C. Hohenberg (1993), Pattern formation outside
the equilibrium, Rev. Mod. Physcis 65 (3), pp. 851–1112.
[15] A. de Wit (1999). Spatial patterns and spatiotemporal dynamics in
chemical physics, Adv. Chem. Phys. 109, pp. 435–513.
[16] A. Doelman, W. Eckhaus and T. J. Kaper (2001), Slowly-modulated
two-pulse solutions in the Gray-Scott model I: asymptotic construction
and stability, SIAM J. Appl. Math. 61 (3), pp. 1080–1102.
[17] A. Doelman, W. Eckhaus and T. J. Kaper (2001), Slowly-modulated
two-pulse solutions in the Gray-Scott model I: geometric theory, bifurcations and splitting dynamics, SIAM J. Appl. Math. 61 (6), pp. 2036–
2062.
[18] A. Doelman, R. A. Gardner and T. J. Kaper (2000), A stability index
analysis of 1-D patterns of the Gray-Scott model, Memoirs of the AMS
155 (737).
[19] A. Doelman, R. A. Gardner and T. J. Kaper (1998), Stability analysis
of singular patterns in the 1D Gray-Scott model: A matched asymptotic
approach, Physica D 122 (1-4), pp. 1–36.
[20] A. Doelman and T. J. Kaper (2003), Semi-strong pulse interactions in
a class of coupled reaction-diffusion equations, SIAM. J. Appl. Dyn. Sys.
2 (1), pp. 53–96.
[21] A. Doelman, T. J. Kaper and K. Promislow (2008), Nonlinear asymptotic stability of the semi-strong pulse dynamics in a regularized GiererMeinhardt mode, SIAM J. Math. Anal., 38 (6), pp. 1760–1789.
[22] A. Doelman, T. J. Kaper and P. A. Zegeling (1997), Pattern formation
in the one-dimensional Gray-Scott model, Nonlinearity 10, pp. 523–563.
156
Chapter 5. Bibliography
[23] A. Doelman, P. Van Heijster and T. J. Kaper (2008), Pulse dynamics
in a three-component system: Existence analysis, J. Dynam. Differential
Equations (in press).
[24] S. Ei (2002), The motion of weakly interacting pulses in reactiondiffusion systems, J. Dynam. Differential Equations 14 (1), pp. 85–137.
[25] S. Ei, H. Ikeda and T. Kawana (2008), Dynamics of front solutions in
a specific reaction-diffusion system in one dimension, Japan J. Indust.
Appl. Math. 25 (1), pp. 117–147.
[26] S. Ei, M. Mimura and M. Nagayama (2002), Pulse-pulse interaction in
reaction-diffusion systems, Physica D 165 (3-4), pp. 176–198.
[27] S. Ei, M. Mimura and M. Nagayama (2006), Interacting spots in
reaction-diffusion systems, Discrete Contin. Dyn. Sys. 14 (1), pp. 31–2.
[28] S. Ei and J. Wei (2002), Dynamics of metastable localized patterns
and its application to the interaction of spike solutions for the GiererMeinhardt system in two space dimensions, Japan J. Indust. Appl. Math.
19 (2), pp. 181–226.
[29] M. Frankel, G. Kovacic, V. Roytburd and I. Timofeyev (2000), Finitedimensional dynamical system modeling thermal instabilities, Physica D
137 (3-4), pp. 295–315.
[30] A. Garfinkel, Y. Tintut, D. Petrasek, K. Bostrom and L. Demer (2004),
Pattern formation by vascular mesenchymal cells, Proc. Natl. Acad. Sci.
USA 101, pp. 9247–9250.
[31] A. Gierer and H. Meinhardt (1972), A theory of biological pattern formation, Kybernetik 12 (1), pp. 30–39.
[32] K. B. Glasner (2009), Spatially Localized Structures in Diblock Copolymer Mixtures. submitted, SIAM J. Appl. Math..
[33] M. I. Golubitsky, I. Stewart, D. G. Schaeffer (1988), Singularities and
Groups in Bifurcation Theory vol. II, Applied Mathematical Sciences 69,
Springer, New York.
[34] A. A. Golovin, B. J. Matkowsky and V. A. Volpert (2008), Turing
pattern formation in the Brusselator model with superdiffusion, SIAM J.
Appl. Math., 69 (1), pp. 251–272.
157
Chapter 5. Bibliography
[35] P. Gray and S.K.Scott (1984), Autocatalytic reactions in the isothermal, continuous stirred tank reactor: Oscillations and instabilities in the
system A + 2B → 3B, B → C, Chem. Eng. Sci. 39, pp. 1087–1097.
[36] S. Gueron and I. Shafrir (1999), On a Discrete Variational Problem
Involving Interacting Particles, SIAM J. Appl. Math., 60 (1), pp. 1–17.
[37] P. Van Heijster, A. Doelman and T. J. Kaper (2008), Pulse dynamics in a three-component system: stability and bifurcations Physica D,
237(24), pp. 3335–3368.
[38] T. Ikeda and Y. Nishiura (1994), Pattern selection for two breathers,
SIAM J. Appl. Math. 54 (1), pp. 195–230.
[39] D. Iron and M. J. Ward (2002), The dynamics of multi-spike solutions
to the one-dimensional Gierer-Meinhardt model, SIAM J. Appl. Math.
62 (6), pp. 1924–1951.
[40] D. Iron, M. J. Ward and J. Wei (2001), The stability of spike solutions
to the one-dimensional Gierer-Meinhardt model, Physica D 150 (1-2),
pp. 25–62.
[41] A. Kaminaga, V. K. Vanag and I. R. Epstein (2006), A reactiondiffusion memory device, Angew. Chem. Int. Ed. 45, pp. 3087–3089.
[42] B. S. Kerner and V. V. Osipov (1989), Autosolitons, Sov. Phys.- Usp.
32 (2), pp. 101–138.
[43] B. S. Kerner and V. V. Osipov (1994), Autosolitons: A new approach
to problems of self-organization and turburlence, Dordrecht: Kluwer.
[44] B. S. Kerner and V. V. Osipov (1990), Self-organization in active distributed media: scenarios for the spontaneous formation and evolution
of dissipative structures, Sov. Phys.- Usp. 33 (9), pp. 679–719.
[45] J. Kevorkian, J. Cole (1981), Perturbation Methods in Applied Mathematics, Applied Mathematical Sciences 34, Springer-Verlag, New York,
Berlin.
[46] C. M. Kirk and W. E. Olmstead (2005), Blow-up solutions of the twodimensional heat equation due to a localized moving source, Anal. Appl.
(Singap.) 3 (1), pp. 1–16.
158
Chapter 5. Bibliography
[47] E. Knobloch (2003), Outstanding problems in the theory of pattern formation, in Nonlinear dynamics and chaos. Where do we go from here?
S. J. Hogan, et al. (Eds.), Institute of Physics Publishing, Bristol, UK,
pp. 117–166.
[48] S. Koga and Y. Kuramoto (1980), Localized patterns in reactiondiffusion systems, Prog. Theor. Phys. 63, pp. 106–121.
[49] T. Kolokolnikov, T. Erneux and J. Wei (2006), Mesa-type patterns in
the one-dimensional Brusselator and their stability, Physica D 214 (1),
pp. 63–77.
[50] T. Kolokolnikov, W. Sun, M. J. Ward and J. Wei (2006), The stability
of a stripe for the Gierer-Meinhardt model and the effect of saturation,
SIAM J. Appl. Dyn. Sys. 5 (2), pp. 313–363.
[51] T. Kolokolnikov, M. S. Titcombe and M. J. Ward (2005), Optimizing
the fundamental Neumann eigenvalue for the Laplacian in a domain with
small traps, European J. Appl. Math. 16 (2), pp. 161–200.
[52] T. Kolokolnikov and M. J. Ward (2003), Reduced wave Green’s functions
and their effect on the dynamics of a spike for the Gierer-Meinhardt
model, Euro. J. Appl. Math. 14 (5), pp. 513–545.
[53] T. Kolokolnikov, M. J. Ward and J. Wei (2006), Slow translational
instabilities of spike patterns in the one-dimensional Gray-Scott model,
Interfaces Free Bound. 8 (2), pp. 185–222.
[54] T. Kolokolnikov, M. J. Ward and J. Wei (2005), The existence and
stability of spike equilibria in the one-dimensional Gray-Scott Model: The
low feed rate regime, Studies in Appl. Math. 115, pp. 21–71.
[55] T. Kolokolnikov, M. J. Ward and J. Wei (2005), The existence and
stability of spike equilibria in the one-dimensional Gray-Scott model: The
pulse-splitting regime, Physica D. 202 (3-4), pp. 258–293.
[56] T. Kolokolnikov, M. J. Ward, and J. Wei (2009), Spot self-replication
and dynamics for the Schnakenburg model in two-dimensional domain,
J. Nonlinear Sci. 19 (1), pp. 1–56.
[57] T. Kolokolnikov, M. J. Ward, and J. Wei (2006), Zigzag and Breakup
Instabilities of Stripes and Rings in the Two-Dimensional Gray-Scott
Model, Studies in Appl. Math. 16 (1), pp. 35–95.
159
Chapter 5. Bibliography
[58] S. Kondo and R. Asai (1995), A Reaction-Diffusion Wave on the Skin
of the Marine Angelfish Pomacanthus, Nature 376, pp. 765–768.
[59] K. Lee, W. D. McCormick, J. E. Pearson and H. L. Swinney (1994),
Experimental observation of self-replication spots in a reaction-diffusion
system, Nature 369, pp. 215–182.
[60] M. Mimura, M. Nagayama and K. Sakamoto (1995), Pattern dynamics
in an exothermic reaction, Physica D 84 (1-2), pp. 58–71.
[61] C. B. Muratov and V. V. Osipov (1996), Scenarios of domain pattern
formation in reaction-diffusion system, Phys. Rev. E 54, pp. 4860–4879.
[62] C. B. Muratov and V. V. Osipov (2001), Spike autosolitons and pattern
formation scenarios in the two-dimensional Gray-Scott model, Eur. Phys.
J. B 22, pp. 213–221.
[63] C. B. Muratov and V. V. Osipov (2002), Stability of static spike
autosolitons in the Gray-Scott model, SIAM J. Appl. Math. 62 (5),
pp. 1463–1487.
[64] C. B. Muratov and V. V. Osipov (2000), Static spike autosolitons in
the Gray-Scott model, J. Phys. A: Math Gen. 33, pp. 8893–8916.
[65] C. B. Muratov and V. V. Osipov (2001), Traveling spike auto-solitons
in the Gray-Scott model, Physica D 155 (1-2), pp. 112–131.
[66] J. D. Murray (2003), Mathematical Biology II: Spatial Models and
Biomedical Applications, Interdisciplinary Applied Mathematics 18,
Springer, New York.
[67] A. C. Newell and J. A. Whitehead (1969), Finite bandwidth, finite amplitude convection, J. Fluid Mech. 38 (2), pp. 279–303.
[68] Y. Nishiura (2001), Global bifurcational approach to the onset of spatiotemporal chaos in reaction-diffusion systems, Meth. Appl. Anal. 8 (2),
pp. 321–332.
[69] Y. Nishiura and H. Fujii (1987), Stability of singularly perturbed solutions to systems of reaction-diffusion equations, SIAM J. Math. Anal.
18, pp. 1726–1770.
[70] Y. Nishiura and H. Mimura (1989), Layer oscillations in reactiondiffusion systems, SIAM J. Appl. Math. 49 (2), pp. 481–514.
160
Chapter 5. Bibliography
[71] Y. Nishura, T. Teramoto and K. Ueda (2005), Scattering of traveling
spots in dissipative systems, Chaos 15, 047509.
[72] Y. Nishiura and D. Ueyama (1999), A skeleton structure of selfreplicating dynamics, Physica D 130, pp. 73–104.
[73] Y. Nishiura and D. Ueyama (2001), Spatial-temporal chaos in GrayScott model, Physica D 150 (3-4), pp. 137–162.
[74] J. Ockendon, S. Howison, A. Lacey and A. Movchan (2001), Applied
Partial Differential Equations, Oxford U. Press.
[75] Q. Ouyang and H. L. Swinney (1991), Transition from a uniform state
to hexagonal and striped Turing patterns, Nature 352, pp. 610–612.
[76] J. H. Park, A. Bayliss, B. J. Matkowsky and A. A. Nepomnyashchy
(2006), On the route to extinction in nonadiabatic solid flames, SIAM J.
Appl. Math. 66 (3), pp. 873–895.
[77] J. E. Pearson (1993), Complex Patterns in a Simple System, Science,
216, pp. 189–192.
[78] W. N. Reynolds, S. P. Dawson and J. E. Pearson (1997), Self-replicating
spots in reaction-diffusion systems, Phys. Rev. E 56 (1), pp. 185–198.
[79] W. N. Reynolds, J. E. Pearson and S. P. Dawson (1994), Dynamics of
self-replicating patterns in reaction-diffusion systems, Phys. Rev. Lett.
72, pp. 2797–2800.
[80] C. P. Schenk, M. Or-Guil, M. Bode and H. Purwins (1997), Interacting
pulses in three-component reaction-diffusion systems on two-dimensional
domains, PRL 78 (19), pp. 3781–3784.
[81] L. A. Segel (1966), The importance of asymptotic analysis in applied
mathematics, Am. Math. Monthly 73, pp. 7–14.
[82] L. A. Segel (1969), Distant side-walls cause slow amplitude modulation
of cellular convection, J. Fluid Mech. 38, pp. 203–224.
[83] L. A. Segel and J. L. Jackson (1972), Dissipative structure: an explanation and an ecological example, J. Theor. Biol. 37, pp. 545–549.
[84] L. A. Segel and M. Slemrod (1989), The quasi-steady state assumption:
a case study in perturbation, SIAM Rev. 31 (3), pp. 446–477.
161
Chapter 5. Bibliography
[85] R. Straube, M. J. Ward and M. Falcke (2007) Reaction rate of small
diffusing molecules on a cylindrical membrane, J. Stat. Physics 129 (2),
pp. 377–405.
[86] W. Sun, M. J. Ward and R. Russel (2005), The slow dynamics of twospike solutions for the Gray-Scott and Gierer-Meinhardt systems: competition and oscillatory instabilities, SIAM J. Appl. Dyn. Syst. 4 (4),
pp. 904–953.
[87] C. Teuscher, foreword by D. Hofstadter (2004), Alan Turing: life and
legacy of a great thinker, Springer Press, first edition.
[88] M. S. Titcombe and M. J. Ward (2000), An asymptotic study of oxygen
transport from multiple capillaries to skeletal muscle tissue, SIAM J.
Appl. Math. 60 (5), pp. 1767–1788.
[89] A. K. Tornberg and B. Engquist (2004), Numerical approximation of
singular source terms in differential equations, J.Comput.Phys., 200 (2),
pp. 462-488.
[90] A. M. Turing (1952), The Chemical Basis of Morphogenesis, Philos.
Trans. R. Soc. 237, pp. 37–72.
[91] D.Ueyama (1999), Dynamics of self-replicating patterns in the onedimensional Gray-Scott model, Hokkaido Math J. 28 (1), pp. 175–210.
[92] V. K. Vanag and I. R. Epstein (2007), Localized patterns in reactiondiffusion systems, Chaos 17 (3), 037110.
[93] H. van der Ploeg and A. Doelman (2005), Stability of spatially periodic pulse patterns in a class of singularly perturbed reaction-diffusion
equations, Indiana Univ. Math. J 54 (5), pp. 1219-1301.
[94] D. Walgraef (1997), Spatio-Temporal Pattern Formation, With Examples from Physics, Chemistry, and Materials Science, Springer, New
York.
[95] M. J. Ward (2006), Asymptotic Methods for Reaction-Diffusion Systems: Past and Present, Bull. Math. Biol. 68 (5), pp. 1151–1167.
[96] M. J. Ward, W. D. Henshaw and J. B. Keller (1993), Summing logarithmic expansions for singularly perturbed eigenvalue problems, SIAM
J.Appl.Math. 53 (3), pp. 799–828.
162
Chapter 5. Bibliography
[97] M. J. Ward and J. Wei (2003), Hopf bifurcations and oscillatory instabilities of spike solutions for the one-dimensional Gierer-Meinhardt
model, J. Nonlinear Sci. 13 (2), pp. 209–264.
[98] J. Wei (1999), On single interior spike solutions for the GiererMeinhardt system: uniqueness and stability estimates, Europ. J. Appl.
Math. 10 (4), pp. 353–378.
[99] J. Wei (2001), Pattern formations in two-dimensional Gray-Scott
model: existence of single-spot solutions and their stability, Physica D.
148, pp. 20–48.
[100] J. Wei and M. Winter (2003), Asymmetric spotty patterns for the
Gray-Scott model in R2 , Studies in Appl. Math. 110 (1), pp. 63–102.
[101] J. Wei and M. Winter (2003), Existence and stability of multiple spot
solutions for the Gray-Scott model in R2 , Physica D. 176 (3-4), pp. 147180.
[102] J. Wei and M. Winter (2002), Spikes for the two-dimensional GiererMeinhardt system: the strong coupling case, J. Differ. Equ. 178 (2),
pp. 478–518.
[103] J. Wei and M. Winter (2001), Spikes for the two-dimensional GiererMeinhardt system: the weak coupling case, J. Nonlinear Sci. 11 (6),
pp. 415–458.
[104] J. Wei and M. Winter (2008), Stationary multiple spots for reactiondiffusion systems, J. Math. Biol. 57 (1), pp. 53–89.
[105] A. Yochelis, Y. Tintut, L. L. Demer and A. Garfinkel (2008), The formation of labyrinths, spots and stripe patterns in a biochemical approach
to cardiovascular, New J. Phys, 10 (16pp)
163