Monitoring Are
advertisement

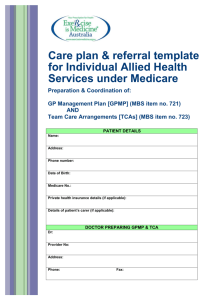
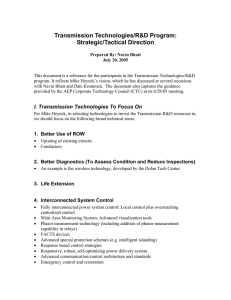
by Mark Adamiak, General Electric , USA Synchrophasors Wide Are Monitoring 32 I see Synchrophasor technology as "LAZER" of the utility industry Synchrophasors... in the beginning, ( as I remember it ) This was the beginning, but the technology is still in its infancy. The transition of power system protection from electromechanical and static techniques to digital can best be described as an evolution of computer hardware, concepts, and algorithms. The original concept of using a computer to protect power lines can be traced to George Rockefeller’s master’s thesis back in 1969. Starting around 1970, Westinghouse (yes, they used to make relays) started a research project to demonstrate the ability of a computer to capture waveform data, process it, and make a decision. In this same time frame (1971), there was interest in American Electric Power and General Electric (1975) to explore similar uses of computers for protection and control. The original AEP effort was a joint effort with IBM who, as owners of the main frame, had just recently introduced the concept of the mini-computer. For this project, IBM provided their System 1 AEP System Map The old map, displaying the major AEP locations Captured data was used to examine Marysville Substation instantaneous phase angles between Rockport Substation Rockport and Marysville PAC.AUTUMN.2007 7 minicomputer (Fig.2). This machine was 1.2 m square and stood about 1.6 m high. The minicomputer was leading edge technology for its day – having 128kb of memory and a “huge” 10MB hard disk. The machine was programmed via punched cards (key punch machine visible on the right of Fig. 2. What was most unique about this implementation was that this computer was fitted with a high-speed modem, which was capable of communicating with an IBM mainframe at the blazing speed of 600 bps (the rest of the world was still communicating at 300 bps). A 12-bit A/D converter was interfaced with the machine and voltage and current waveforms were isolated, filtered, and sampled at 12 samples per cycle. The original AEP processing algorithm, as developed by Arun Phadke, Ted Hlibka (Fig. 2), and Mohamed Ibrahim was a least squares estimate of the voltage and current phasors which then fed into a fault calculation process. In 1972, the completed system was installed on the AEP system in Appalachian Power Company’s Matt Funk substation. The computer monitored voltages and currents on the Matt Funk – Glen Lynn 138kV line. A software disturbance detector, when triggered, would force a capture of the samples of voltage and current immediately before and after the trigger. The captured file could be uploaded via the modem (an overnight exercise) to an IBM mainframe located at AEP’s then headquarters at 2 Broadway in New York City. The uploaded file was then massaged using the Tektronics Plot10 software and plotted on a Calcomp flatbed plotter – effectively the worlds first digital fault recorder. As computer hardware and performance improved, work on enhanced algorithms at AEP followed right behind. Specifically, the Digital Equipment Corporation (DEC) introduced the PDP 11/70, which became the “next generation” hardware platform for AEP’s digital relay research. It was on this platform that the Fourier Transform was first introduced as the mechanism for computing the Voltage and Current phasors that were used in the calculation of distance to fault. Additionally, it was also on this platform where the concept of a Symmetrical Component Distance Relay was introduced. Test data for the algorithm was provided by a low-power model power system that was capable of “continuous” short circuit currents. The system could be configured for multiple voltage levels, line lengths, and bus 33 configurations. Voltages and currents were measured using isolated voltage dividers and current shunts (nichrome wire) respectively. The low-level signals (+/-10V) were filtered and fed into a multiplexed A/D converter (DEC ADF-11) which had Direct Memory Access (DMA) directly into the memory of the 11/70. The voltages and currents were sampled at 720 samples per second – resulting in a sampling angle of 30. This sampling angle was chosen as the Fourier coefficients for Sine and Cosine were 0, +/-1, +/-0.5, and +/- 0.866. Multiplication of these coefficients with the sampled data values was fairly simple – except for the value of 0.866. This multiplication was implemented by scaling the input signal by 0.866 in hardware and sampling the signal a second time as the A/D converter was faster than an accurate multiply. The PDP 11/70 computer was a good proving ground but in 1979, it became time for the next step – development of a system for a substation test. The hardware that was identified for this migration was the Plessey Miproc computer. The Miproc was an early Reduced Instruction Set Computer (RISC) that was built around the “Harvard” architecture of separate Program and Data memories. It was in the migration of the distance algorithms to the Miproc that the Synchrophasor was identified, specifically, when I was working on the “memory voltage”. With memory voltage, when a fault occurred, a one-cycle old phasor value of Positive Sequence Voltage (computed by a Fourier algorithm) was frozen and used as a direction check for 3-phase faults when the positive sequence voltage collapsed to less than 10% of nominal. During testing of the algorithm, I noted that after the fault cleared and before the “frozen” value of voltage was released, there was a measurable phase angle difference between the frozen value and the most recent voltage phasor. I brought this phenomenon to the attention of Dr. Arun 2 The Beginning IBM System 7 Minicomputer & Key Punch Machine Phadke at AEP and Dr. Jim Thorp (who was working part time for AEP at the time). The ensuing analysis highlighted the fact that, given the fixed sample rate of the system, the Fourier phasor angle would rotate at a rate equal to the off-nominal frequency of the power system. Specifically, if the power system frequency was greater than nominal, the Fourier phasor would rotate in the counter-clockwise direction, if the frequency was less than nominal, it would rotate in the clockwise direction, and if the frequency was precisely at nominal, the phasor would stay at a fixed phase angle. In the system on which this was discovered, the sample clock was fixed and adjusted to 720 Hz (12 samples per cycle on a 60 Hz system - 0.064%). Subsequent testing on the AEP model power system (Fig. 3) confirmed the ability to calculate frequency and rate of change of frequency. The next step in the process came with the realization by Phadke and Thorp that if the clock driving the A/D converter/Fourier calculation was “common” throughout a region, then “Synchronized” measurements could be made over the region. This vision initiated a search for a common clock source. The search began with the time code transmitted from Fort Collins, CO known as WWVB. WWVB is transmitted as a 60 KHz amplitude modulated signal, however, it has no automatic correction for the transmission time delay. Considering the 2000 miles from Ft. Collins to New York City, there is a time delay of about 10ms. Although a local correction could be applied, atmospheric conditions always added a random time delay. LORAN C was also considered but again, the accuracy wasn’t there and Cesium clocks were not affordable for substation installation. In parallel with the development of the Synchrophasor concept, a new timing technology known as the Global Positioning System (GPS) was beginning to appear. GPS 3 Development Subsequent Testing on the AEP Model Power System PAC.AUTUMN.2007 Biography Mark Adamiak received his BS and ME degrees from Cornell University and MS-EE from the Polytechnic Institute of New York. He worked for American Electric Power (AEP) in the System Protection and Control section, where his assignments included R&D in digital protection and control, relay and fault analysis, and system responsibility for power line carrier and fault recorders. Since 1990 Mark is with General Electric and is currently an Advanced Technology Programs manager. Synchrophasors Wide Are Monitoring 34 was a satellite based timing system where time and orbital location information from multiple satellites were received by a single receiver. The receiver could then accurately compute time and location. GPS promised sub-microsecond absolute time accuracy over the entire earth. The first GPS satellite was launched in 1978 and by 1985, there were 11 satellites in orbit – enough for at least 12 hours of daily visibility. This was the timing source that we needed. In the1987/1988 time frame, work began at Virginia Tech (where Dr. Phadke had relocated) in conjunction with AEP on a system to compute synchronized phasor measurements on what was originally known as a Phase Angle Measurement (PAM) unit the name of which has since transitioned to Phasor Measurement Unit (PMU). Demonstration sites were chosen in AEP’s Marysville and Rockport 765kV substations. The first PMUs were built on a Motorola 68020 VME system. The system consisted of a VME chassis, a power supply, and a 16 channel A/D converter. An external signal processing system provided signal conditioning, surge suppression, and Anti Aliasing filtering. The A/D converter was synchronously triggered by an Odetics GPS clock at 720 samples per second. The synchronized phasors were then computed through a Fourier transform with the goal of streaming the phasors from a substation to a central location. The substation to headquarters communication channel available on the AEP system in 1988 was a 4800 bps link through the AEP analog microwave system. Given this bandwidth, optimization of the packet carrying the synchrophasors was paramount. The obvious format was the 4 Ye Old PAM Data Frequency and phase angle plot use of binary-formatted data to transmit the synchronized phasors and system frequency (even Arun Phadke had to agree…). For this first installation, a streaming rate of 12 packets per second was chosen with a packet content of positive sequence voltage and system frequency – which just fit into the 4800 bps bandwidth. The packet needed to contain an absolute “time stamp” in order to uniquely identify the received packet in time. The first time stamp implementation was based on the wellknown format of: Year-Month-Day-Hour-Minute-SecondSample count. Paul Sorenson (then at AEP) was asked to create a Phasor Data Concentrator on a PDP 11/73 computer that had multiple serial ports and a 100MB disk drive (which was quickly migrated to a DEC MicroVAX). It was explained to Paul that he had to align each received packet based on the Year-Month-Day-Hour-Minute-Second-Sample count field. As he tried to implement the alignment algorithm, he found that sorting on so many fields was problematic. Paul then made the suggestion to use the Network Time Protocol (NTP) Second of Century field, which was a 32-bit integer count of seconds since January 1, 1900 which (Note: this was changed in the C37.118 revision of the Synchrophasor standard to January 1, 1970 providing time stamping until the year 2106). This change enabled the PDP computer to capture two simultaneous streams of data at 12 packets per second and store them to disk – effectively the worlds first Phasor Data Concentrator - PDC. The two units were installed in the field in late 1988 and began streaming data into the Columbus, OH PDC. Captured data was used to examine instantaneous phase angles between Rockport and Marysville – which were subsequently validated against state estimation data. Additionally, plots were made of frequency and phase angle (Fig. 4). These units remained in service for over a decade – at which point in time, newer units and higher-speed communications became available. As more PMUs are installed around the globe, more data will be available, and more and more applications will be envisioned and developed. The ultimate vision is a completely monitored power system that dynamically detects and controls all aspect of the largest machine in the world – the electric power grid. PAC.AUTUMN.2007