Document Services MIT
advertisement

MIT Document Services
Room 14-0551
77 Massachusetts Avenue
Cambridge, MA 02139
ph: 617/253-5668 1fx: 617/253-1690
email: docs @mit.edu
http://iibraries.mit.edu/docs
DISCLAIMER OF QUALITY
Due to the condition of the original material, there are
unavoidable flaws in this reproduction. We have made every
effort to provide you with the best copy available. If you are
dissatisfied with this product and find it unusable, please
contact Document Services as soon as possible.
Thank you.
LIDS-P-1731
Dece:ber 1987
A PROJECTION SPACE MIAP METHOD FOR
LLMITED ANGLE RECONSTRUCTION
Jerry L. Prr.nce and Alan S. Ti'llsky
Laboratorn for Information and Decision Systems
Department of Electrical Engineering,
Massachusetts Institute of Technology, Cambridge, .MA 02139
Abstract
present a method to re-onstruct images from finite sets
WVe
of noi-y projections which are available only over limited or
sparse angles. The method solves a constrained opti-ization problem to _d a maximum a posterioni (MAP) es;imate of :he ful' 2-D Radon transform of the object, usn g
prior inowledge of object mass, center of mass, and ccnvex
support. and information about fundamental const.rin:s
and smoothness of the Pzdon transfor-m. This ef=cient
prima-dtual algor:nhm cornssts of an iterative local relaax-y
ation stage which solves a partial differential equation in
Radon-space, fo'owed by a simple Lagrange multiplier upreconstructed us°ng convolution
6ate sLaze. The ob;ect is reconstructed us -g convoiltion
applied
hackpro;ection
esti-te.
transform estimz;e.
-The to
to :he
the Radon
Radon transfo-m
-ackproo~ection
appied
I.
Introduction
sfwe)-
<'J()}
~)dwhere
g(t 9) ~ =.~fz~(
where f(z) is a real function defined on the plane (which
we will azsume to be zero outside the ddlk of radu-s T
= [cos 6 sin £;T. Thus, the
centered at the origin) ande
2-D P.adon traysform g(t,6), for fixed t and 6, is a line
integral of the function ffz) along the line with lateral
displzcement t and unit normal w.
,hen one obtains a large number of accurate mea-suements of g(t,6) for t E [-T,T] and 6 E IO,,r), then a
high-qualiW' reconconstruction of f(z) may be made using
conventional techniques, e.g., convolution backprojection
[2]. However, when the line integrals are observed in noise,
and when the angular range is restricted to a subset of
[0,xr)- i.e. eit:er the lmi;ed- or sparse-angle situation
I-
II.
Consistency and Support
o te 2- Radon
Ceta mathematcal popeies
Certaim mathematical properties of the 2-D Radon .ranform are used to advantage in our reconstruction method.
fi-st property is one of consistency: not all functio.s
P(t,6) are Radon transforms of some function f(=). A
full discussion of the consistency conditions required of
Altho-gh limite- angle tomography has bee.n widely discussed in the litera:ure, adequate imagery- is still no: otainable in discpiines in which there are both restricted
viewing angles a-d low signal to noise ratios (cf. [1: and
references). The problem is fundamentally one of invert-ig
the 2-D Radon tra-sformt given by
-
then these conventional techniques are not adequate.
Some of the methods in the literature designed to account
for the limited- and sparse-angle cases, and in some cases
the noise, include modified transform methods, iteraticn
between spaces, and finite series expansion methods (see
|1 and references). The methods most closely related to
our methods are those which seek to d.rect!y estimate the
full Radon transform such as in [3] and [4].
-
-~~~~~--~~I~~"I-- - -~~~~~~`r~~-
a 2-D Radon transform may be found in 15].What we
require in this paper is the periodicity condition given by
g(t,) = g(-t, 6 + ,;), and the two moment constraints
given by
(2)
T g(t, ) dt = m,
T
and
fT
t[
g(t,)d=
c(),
(3)
c(0) is a cosinusoidal function in 0. Both rn and
c(6) may often be estimated quite accurately [6],`7], so that
we may- use these two equations as conrstraints on the full
Radon transform to be estimated. We assume in what
follows that a pre-processing stage scales and shift-s the
measurements so that m = 1 and c(6) = 0.
The second mathematical property of the 2-D PRadon
transform is one of support: the convez hull of the support
Y of the function f(z) has a one-to-one correspondence to
the support 5 of 2{f(z)}, where by support we mean the
set of points where the function is non-zero. Therefore, if
we knew hul(') a priori, we would insist that any estimate
Our approach, instead,
y. O
of g(t,6) be zero for (t,6)
assumes that we have only an estirateofhul() (produced
perhaps by the methodc in 7,.), and therefore t-at g(t,6)
shoulc be smc: where (:, 6) f 5.
Variational Formulation
III.
Consider the ;roblem, which we refer :o as (VT), to minimize
7I
o
_ 1
_ ot Ir
<c e
g.Y, dod8 +
- ~(,
!
igX .~ /
c+g\2
dt dD
dt.dT
("g)'ag)2
+
the .r
),'
r~ 2d 18
g dtt
(4)
subject to the etuality constraints given by (2) and (3) and
0(:,)
=
boundary con::ions g(T,O) = g(-T,O) = 0 and
g(-t,,.) where r, f3, and -y are positive constants. Here,
Y, = {(t, 0) -T < t < T,O < 6 < r} and Yo is a subset
of JTr over w'hich (noisy) measurements y are available, and
saisfied as well. Since for fi:ed A1(6) and A2(6), the PDE
is elliptic in g(t, 6), we may solve it numerically on a discrete lattice system. This suggests a primal-dual approach
where we solve the PDE in the primal stage for fixed A1
and A., followed by a dual stage which updates Al and 2-.
\We use a very efficient local relaxation algorithm (which
ma be implemented in parallel) due to ;uo et. al !8] to
solve the PDE in the primal phase, and a simple Lagrange
multiplier update stage (see t91). Fortunately, the value
of the final Lagrange multipliers may often be estimated
to high accuracy before beginning the iteration, which
speeds up converegence dramatically i[7]. We su-mmarize
the algorithm below.
Local Relaxation Algorithm:
1. Estimate final Lagrange multipliers %1(0) and ),~().
2. Set A2(6) = .i(6) and A0 (6)
3. Set k = 1 and g = y.
gI.
=
. .4.seeks to
~ , which
e7.~~~~ a..penalty
The first term in I represents
keep the estimate close to the observatiorns. The second
term is a pena::y for non-zero values outside the support
of the Radon transform. and 'na'ly, the third term penalizes large derizatives in both the vertical and horizontal
di-ection, and hi therefore a smoothing term.
A necessar- and sufficient condition for g(t, ) to be a
solution to (V) is that is satisfy- the following second order
-'
pa-tial differe:.ial equation (?DE) [7]
(
+G
EX
g
-
"a
i X1 y-.A(O) A (6)# ()
c'
and the additional bounda-y condition 8g(t,O)'at =
ag(-t.r,)/:, where XG and Xy are the indicator functio-s for _ 2nd 'Jo, respectively. In addition, g( '?,) must
satisf- the orig.-al cons:raints and bo.:dary conditions.
It is important to note that (5) contains three •e:nown
functions: g(t. 6), and two Lagrange ru:ltiplier .nctions
Ax(e)
and A2 (63 (one for each constraint).
1
-
A(6).
1e ao.
Solve PDE numerically to yield gk.
5. Does gk satisfy, the constraints?
6. If not, update Lagrange multipliers according to
r
(6)
= Ala cx mm-]
(6) =
gk(t,)dt)
tc(o
and goto 4.
Se k-k
7. Otherwise, we are done and g = g t .
This algorithm converges to the globally optimum solut:ion provided that a is chosen small enough [9'.
V.
Experimental Results
In this section, we present the results of two experiments,
designed to show the overall performance of the algorithm
on a limited-angle case and on a sparse-angle case. The
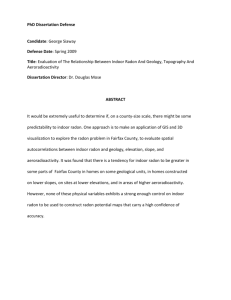
object that is used in these simulations is an ellipse with
bewe describe
The numer'-al solution to (5), which
the letters M I T in its interior, shown in Fig. 1 using an
5)wihede
soutotbbenuera
..
low, is found c: a discrete lattice system in VT. It turns
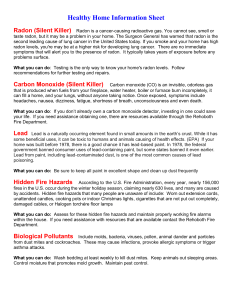
.t twcsko81 by 81 discretization. Fig. 2 shows a noisy sinogramn
.
oe
0
a
finite
n-er
seeks
of
solution,
which
out that this
consisting of 81 rows (sampling t) and
(S^NR=10.OdB),
aximum
variables deno eSi by the vector g, is czcct!y the .- xinaum
60 columns (sampling 6), created by adding independent
to
a zost*riori (M.A'P) estimate of g, when g is described2
samples of zero-mean Gaussian noise with variance c2 to
each element of the true sinogam (not shown).
by a certain Markov random field prior probab:iiy, and
when ;he noise is given bv additive independent, zero-mean
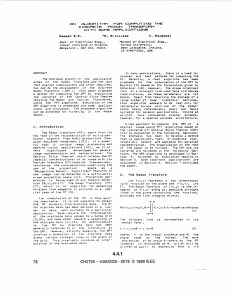
Fig. 3 shows an object reconstruction using convoluGaussian randCcm vriabies with variance ~c [7].
tion backprojection (CBP) in which only the fi-st 40 of
60 (leftmost) projections of the sinogram in Fig. 2 were
IV .
Lo cal Relaxation Algorithm
To solve (5) we must find both g(t, 0) and the two Lazange
multiplier funct'ons, A1 (6) and A2 (6), so that the PDE itself
is satisfied and the mass and center of mass constraints are
-
used. A reconstruction obtained after processing using the
local relaxation .MAP algorithm described in Section IV is
shoun in Fig. 4. In this case, the support G and the mass
m of the Radon tranform were estimcted using methods
described in r7] and [10], while the center of mass was
"""""""~~~I----I-----"l~l-~--'
~~-
Fig. 2. 10dB sinogram of MIT ellipse.
Fi-. 1. Origcnal MIIT ellipse.
which we have explored in 7] is o -incorporatemore t'-an
(correctiy) assu-=ed to be zero. The coeEcients rc ,: and
just two of the constraints inherent to the Radon tra-s3 wer-e se: to 5.0, 0.05, and 0.01. resective!Y.
form.
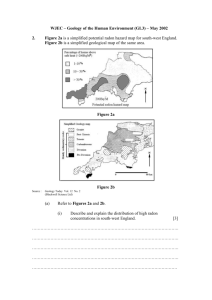
Fig. 5 shows an object reconstruc:ion using convoiution
backprojection (CBP) in which only 10 evenly spaced proReferences
jections of the s-nogram in Fig. 2 were used. A reccnS.ruc.ion obtained after processing using the same coemcients
[1] J. A. Reeds and L. A- Shepp, 'Limited angle reconstruction
abrove is shown in Fic.[ 6.
Cas
One can see :-rom these two ex-er:raen:s a cr-amatic
in tomography via squashing," IEEE Trans. on MAecical
re.ccing, vol. .x'I-6, pp. 89-97. June 1987.
improvement in the recor.structiors. The iimited-angle
case showmn in Fi;s. 3 and 4 shows most clearly how supr2]omato
. ic
R. ws
Dea-s,
sm omThe
mre-Redon Trans.form and Some of Its Arpli,)ort informlation - w--ic]: was es:-.rate.d -om Teasurecations. New York: John Wiley and Sons, 1983.
ment;s in this case - can improve the de;fnition of the
[3] .. K. Lo-s, 'Picture reconstruction from projections in
object bounda-ie-. The spase-angle case shows co=nderrestricted range," Math. Meth. in the Appl. Sci., vol. 2,
able improvemer.: resulting primari:.- from the horizontal
pp- 209-220, 190.
smoothing effec:s and constraints. The in;ermedia:e rekite:?o':aed,
sult 'not sho'nl) -1 each c-se is a smoothed, sut
nn each cse is'- 4] a5. H. Bucnocore, Fcst Minimum Variance Estimatorsfor
ecn cand feasible (with respect to the mass and center of mass
Limited An.gl Computed Tomogrcphy Imae
Image Reconstrucconstraints) sinogram.
tion. PhD thesis, Stanford University, 1981.
VI.
[5] S. Helgason, The Radon Transform.
Bri::auser. 1930.
Discussion
Bosto=,
MY4:
[6] D. J. Rossi and A. S. Willsky, 'Reconstruction from pro.
c-tions based on detection and estimation of objects-parts
I and II: performance analysis and robustness analyss,"
,EEE Trans. ASSP, vol. ASSP-32, no. 4, pp. 88-90, 1984.
W'e -ave demons-t:ated in :his oao: a method based on
estisatlion principles for reconstructing images from thelr
noisy and limited-angle or sparse-angle Rzadon tracsforms.
We have showun that including ce:tai- types of prior imowledge can lead to improvec reconstruction over co--olution back-projection appiied directly to the measurements.
A hierarchical a-orithm Cescribec in '7,, however, allows muc~h~
of this informa:tion to be estimated in -revious stages; therefore, the method is largely self-conta:-ed.
.Marny extensions to this work a-e possible. One extension
I7] J. L. Prince, Geomet.ic .fodel-3asedEstimation From Pro:ect-ons. PhD thesis, Mfassachusetts Institute of Techmolog, Janua 1988. Dept. Elec. Engr.
!nll8]
C. J. Kuo and B. C. Levy, 'A t-wo-level four-color SOR
met;od," Tech. Rep. LIDS-P-1625, MIT Laboratory for
Information and Decision Systems, 1986.
3
Fig. 3. L.ited-zngie recons:;uction using CBP.
Fig. 4. Limited-angie recons.-uc-ion after processing.
Fig. 5. Sparse-anc-re recostrction us.ng C3?.
Fig. 6. Spa.rse-angle reconst-uction after processiL.-
[9 D. P. Bertse-Skas, Cor.,:rained Ontimi:ation and
ng
/MultiplierrMethod.. New York: .Acadeic Press, 1922.
[10Q J. L. Prince and A. S. Willsky, ?'Recon-:tructing co=vex sets
from supo-' line meas'rements' Tech. Rep. LID-P-1,04,
.M.I.T. Labc:atory for Informaion and Decisior Systems.
September :987. S:b---tted to EE P-A-MI.
AcknoL£.ranres
rain ar
Resec
Oic
at
DS-tEd92
the Urou
.S. A.,y
rans
-K-O
nd
3
r. 2adition, the
rk of -re first
author was oar-ia'ly su:oorzec by a U.S. Ar-v Research Office -ellov:snis.