Document 11070399
advertisement

ZI
>ewey
ALFRED
A
P.
Policy
WORKING PAPER
SLOAN SCHOOL OF MANAGEMENT
and Lower Bound for Scheduling
Appointments
Gloria F. M. Lee
Lawrence M. Wein
#3693-94-MSA
MASSACHUSETTS
INSTITUTE OF TECHNOLOGY
50 MEMORIAL DRIVE
CAMBRIDGE, MASSACHUSETTS 02139
May
1994
A
Policy
and Lower Bound for Scheduling
Appointments
Gloria F. M. Lee
Lawrence M. Wein
#3693-94-MSA
May
1994
A
Policy and Lower
Bound
for
Scheduling Appointments
M. Lee
Gloria F.
Operations Research Center, M.I.T.
and
Lawrence M. Wein
Sloan School of Management, M.I.T.
We consider
the problem of scheduling outpatient appointments to optimize the trade1
off
between the patients waiting time and the physician's
defy exact analysis, and
in
we develop a simple
idle time.
The problem appears
iterative algorithm to generate
a suboptimal manner. Dynamic programming
is
to
appointments
used to construct a lower bound on the
optimal objective function value for this problem. Performance of the proposed rule and the
lower
bound are compared under
tified in
different operating
a recent simulation study by
perform slightly better than existing
Ho and
environments to the best policies iden-
Lau. Although the proposed policy appears
policies, this difference in
performance
is
than the performance gap between the lower bound and the proposed policy.
May
1994
tc,
much smaller
MTlibrarJes"
JUN 2
L
1994
RECEIVED
1.
Wc
consider the classic problem of scheduling medical appointments
to minimize the weighted
expected
Introduction
idle time.
sum
Although
of the patients
this
1
it
outpatients
expected waiting time and the physician's
problem, which
described in the context of a medical setting,
for
will
arises
be formulated
Section
in
on a daily basis
in
2, is typically
a variety of service
operations.
This problem has been studied by the operations research community
four decades, and readers are referred to
literature.
Ho and Lau
for
more than
(1992) for an up-to-date review of the
Since the problem appears to be analytically intiactable.
many
of the.se studies
consist of simulation experiments that assess the performance of heuristic policies; must ol
these policies contain parameters that have been fine tuned via simulation. In an extensive
simulation study,
the literature)
in
Ho and Lau compare
:1 different operating environments.
consistently well for
all
expecVd
They
find that
many
u.>
rules
idle time.
between the patients' expected waiting
The authors
also provide rule-of-thumb
from
rule performs
environments, and identify eight rules that generate an
frontier" with respect to the tradeoff
physician's
over 50 scheduling rules (including
time-
"efficient
and the
recommendations
for
the best scheduling iule for various values of the input parameters.
In Section 3 of this paper,
we construct a suboptimal scheduling
policy by iteratively
calculating the probability distribution of a patient's service completion time and then deriving a myopically optimal
is
employed
in
appointment time
Section 4 to derive a lower
the scheduling problem. In Section
and compare
5,
in
Dynamic programming
bound on the optimal objective function value
we repeat a portion
their eight rules to both the
Concluding remarks are provided
for the next patient.
of
Ho and Lau's simulation
for
study.
proposed scheduling policy and the lower bound.
Section
6.
Problem Formulation
2.
Without
time Ai
for the
=
The
0.
of generality,
lo, s
we assume that the
remaining A' -
= l,...,N
1
are
A
assumed
i's
= max(A
bi
=
P,
i
max(0,
Let
idle cost
,
,t _ I
1
6,
—
j
for
We
.
.
.
,
7r
i
1.
e,-_i),
For
i
=
assume that patient
1,
.
.
.
,
to
i
where we take
e
P=
N,
it
follows that patient
=
an d
M
=
5Z l= i Mi. Since
is
t
t
=
(,-
?'s
b
x
-
and
waiting time
i
--
1
is
and
is
to
let
u
b'j
the physician's
choose ihe appointment times
the appointments are
(1
-
.1,
l
v
possibility of patients not
the no-show probability
reduced to
(1)
made
prior to the com-
must be nonanticipating
.,ejv.
Our model can incorporate the
cost
all
of the entire session, the decision variables
If
t
by convention.
Then the scheduling problem
with respect to the service times tj,..
pointments.
denote
(
minimize the expected total cost
J2,=i P\
mencement
\.\
,
arrives punctually at
kE(P)+u;E{M),
where
and
service times
Hen.e.
patients are waiting.
denote the patients' waiting cost per unit time, and
per unit time.
.4.v
>
b,
at
and identically distributed random variables
when
idles
and ends. The
let
A2
A,) and the idle time incurred by the physician between patients
M, = max(0, V -
is
A2
l
scheduled to arrive
is
Lau's notation, we
service begins
to be independent
and the physician never
t ,
Ho and
patients. Following
with cumulative distribution function F.
time
patient
decision variables for our problem are the appointment limes
respectively the time at which patient
6,, i
first
is
p then P(t,
=
0)
=
showing up
for their ap-
p and the patients' waiting
p)7r.
3.
Our proposed scheduling
The Scheduling
policy
is
a simple
Policy
iter.it ive
procedure, where two calculal ions
.
are
made
at each stage. In the first calculation,
of e,_i, which
is
we assume
the time at which service to patienl
i
—
1
that the probability distribution
is
completed,
nE{P,)
to minimize the expected waiting cost
myopically choose
.4,
expected
ujE(M,) incurred by the physician between patients
idle cost
A
second calculation, given
used at stage
More
+
i
we compute the
,
G, and
specifically, let
7rE{P,)+uE(M
e,
=
—
l's
Gi(y)
)
t
=
jr£(max{e,-_i
=
7T
-
A,,0})
+ uE(max{A,
by
(2),
is
will
be
-e,-_i,0})
A
f°°
(ej_i
/
-
in
+ u>
Ai)gi-i (Ci_i)<fe,-_i
'
f
(.4,
/
-
e,_! )g,^ l (t,_
]
)c/c,_i.
Gu
is
u.'
i
is
a critical fract'dc oi
Uv
distribution
=
P(A-
+
t
i
<y)P(e
+ U>
equation (2)
ol
e,.
we have
/,,
l
_1
7T
is
<A;) + P(e
+
U)
starts with A\
N=
2,
indeed the optimal policy.
t
_l
+t <y)P(e
l
l
_1
>
A;)
JO
=
used to calculate A\,
obtained. For the case
which
+
hand, we now calculate the cumulative distribution function G,
To summarize, the algorithm
A'N
which
e,-,
euding time.
7T
until
In the
i.
Then
respectively.
e,,
max{A*,e,_i} +
to calculate
and
1
this expression with respect to A, yields
With A"
Since
-
i
phis the
i
denote the cumulative distribution function and the
g,
Hence, the proposed appointment time for patient
?'
for p>.t,ient
probability distribution for
7T
of patient
known, and then
1
density function of
Minimizing
t
is
and
(3)
we note that
is
G'i
Go (0) =
1.
Equation
used to calculate
= F by
(3)
and
i ,.
(
.4",
=
(3)
is
used
and so on
_1
/'
(t^~~)
The Lower Bound
4.
The
st
lower bo>inu for the scheduling problem
We assume that
ructure:
moment
the
paiient
formulation, which
to determine a
Aj,
.
.
Mj =
and
recursion
t
for
Pl+X =
terms of
P
t
can be delayed until
similar to those arising in stochastic inventory theory,
M, and
,
i
=
1,
.
.
t,
is
l
=
P,
as in Section
and
1,
let
t,
constructed
is
(1).
our decision variables be given by
the interarrival time between patients
,N —
.
max{P, +
decision variables y
in
A
begins service. Under this assumption, a dynamic programming
1
Ajv-i, where A,
,
.
is
—
the determination of the appointment time
dynamic scheduling policy that provides a lower bound on
P
Define
i
derived by relaxing the information
is
and
i
i
+
Then
1.
P\
=
the quantities P, and M, evolve according to the Lindlej
1,
— A,,0} and
— A,, we
M
I+1
= max{A, -
—
P,
£,,()}.
By introducing the
can write the dynamic programming optimality equations
:
k
JN [Pff)
=
./,(/',)
=
min[L(j/
+
+ E(Jl+1 ([/y, +
/,]
u,'E(max{0, -/,
-
)
t
1
))],
<
t
<
N-
I,
(4)
Vt<P,
where L{y)
=
n-£'(max{0,f,
+
(/})
+
Standard convexity arguments
that the optimal policy
L(y)
+
EJ, +l ([y
+
t}
y,
equals
In this bvction, a
of our rule,
Ho and Lau's
vice
i
t
if
P,
+ ). The lower bound
5.
mance
P
(see, for
notation,
we
example, pp. 6G-67 of Bertsekas 1987) imph
<
S,
is
given by
and equals
5,
^(P,
otherwise, where S, minimizes
).
Computational Results
computational study
Ho and
y}).
is
undertaken to compare the relative perfor-
Lau's eight rules and the lower bound from Section
let
ft,
and
rr,
1.
denote the mean and standard deviation
imes. and define the coefficient of variation cv(t)
=
rr,/
fi
t
.
Without
loss
i
il
Following
ol
the ser
generality,
=
fi t
1 is
assumed throughout. As
that are generated by
(i)
Ho and
in
Lau, we consider nine different environments
combinations of
all
Service time dis ribu: >on:
=
cv(t)
f
0.2
and
=
uniformly distributed, and cv{t)
0.5,
1.0.
exponentially distributed.
Number
(ii)
of parents per session: /V=10, 20 or 30.
Ho and Lau
p
=
0.1
considered 18 additional environments by allowing a no-show probability of
and p =
however, we restrict our computational study to the case where the
0.2;
Ho and Lau,
no-show probability equals
zero.
policy in each environment,
and we report the mean of the patients' waiting time
physician's idle time
these
M
means are within
As
in
At
over the 10,000 runs.
±1%
of the true
means
10,000 sessions are simulated for each
this
sample
95%
at the
size.
Ho and Lau
P
and the
claim that
confidence level
For each of the nine environments, we simulated the following eight rules on
Ho and
Lau's efficient frontier:
=
=
•
Rule
1:
A
•
Rule
2:
A =
x
0.
•
Rule
3:
4,
=0,
,4 2
•
Rule
4:
,4!
=
•
Rule
5:
.4,
= A = A3 =
•
Rule
6:
A =
0,
A,
=
{i
-
1
)p
t
•
Rule
7:
.4,
-
0,
A,
=
(?
-
l)p
t
=
{i
-
1
------
x
42
0,
x
t
Rule
8:
0.5(5
-
.4!
=
i
i)(T t for
i
+
x
p, for
0.2,
A3 =
0.6; A,
=
0.3,
A3 =
0.6,
A2 =
0.5,
A3 =
1.0. .4 4
>
>
.4 4
=
0,
i
2.
= A,^ +
A4 =
A,
>
=
= A
l
p
t
for
i
>
3.
0.9; 4,
=
A,_,
+
//,
for
i
>
4.
4,
=
4,_,
+
//,
for
i
>
4.
+
p
for
i
>
1.5;
_l
t
i
>
4.
-
O.Ict, for
-
0.15(5
-
i)a for
i
=
2
5.
4,
-
0.25(5
-
i)a t for
i
=
2
5.
4,
1.
t
---
(i
- l)p
t
5.
4,
0,
A,_
A2 =
2
0.3(5 -i)<j for
•
0; .4,
5.
)p t
=
(?'
-
\)p t
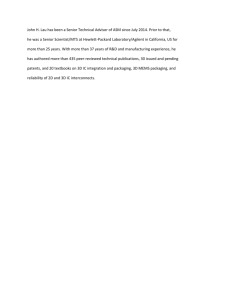
60
I
lower bound
proposed policy
Ho and
Lau's efficient
frontier
0.6
0.4
0.2
0.8
1
E(M
Figure
1:
Tradeoff curves for cv(t)
=
Notice that these eight rules are independent of the cost parameters w and
tradeoff curve for the proposed scheduling policy that
frontier,
our rule was simulated
for ten values of u/ir
Ji(Pi) in (4) was computed for these
same
—
0.2, exponentiallv distributed, .V
is
<jj.
20.
To generate
analogous to Ho and Lau's
equal to 2,4,
.
.
ten cost ratios to generate
.
,20.
a
The
lower
a
efficient
lower bound
bound
tradeoff
curve.
The numerical results are presented
tradeoff curves for
Ho and
environment cv(t) =
0.2, .V
in
Tables
1-3.
In
addition. Figure
1
displays
Lau's policies, the proposed policy and the lower bound for the
=
20.
Graphs
for
the other eight environments are somewhat
.2
similar
and are omitted. The computational
curve usually, but not always, dominates
between these two curves
is
much
We
the proposed policy curve.
results suggest that the
Ho and
proposed policy tradeoff
However, the gap
Lau's tradeoff curve.
smaller than the gap between the lower bound
urve anw
observed no systematic trends of the relative performance of
these three curves with respect to either the variability of the service times or the session
we note
length. Finally,
that although our simulation results for
Ho and
Lau's policies agree
with their numbers with respect to the patients' waiting time, our physician's
results are
somewhat higher than
We revisited
Computational
than the best policies identified
of this
gap
is
•"
due
ver
to
in
proposed scheduling policy performs slightly better
a recent study by
bound and the proposed
i.'.ie
simple
a
appointments and a lower bound on the optimal performance.
results suggest that our
gap between the
Conclusions
the classic appointment scheduling problem, and developed both
iterative procedure to schedule
time
their figures.
Summary and
6.
idle
Ho and
policy
is
Lau. However, the
large,
and
;
i
suboptimality of the proposed policy and hov
how much
unclear
is
much
mance
pert*,
is
due to the
slackness of the lower bound.
We
were rather surprised that the proposed policy did not significantly outperform
the simple Bailey- Welch rules (rules
1
and
5 in Section 5) proposed in the early
1
Dolls
However, despite the relatively small performance gap between the proposed policy and Ho
and Lau's
efficient frontier,
our policy has several attractive features thai make
of consideration. First, whereas the policies considered by
parameters, our policy
the service time
of eight different
t,
is
worth?
finely
tuned
analytically derived in terms of the cost parameters ^ and k and
istribution.
policies,
Ho and Lau employ
it
Second, whereas
Ho and
Lau's
efficienl
frontier
our policy offers a unified treatment of the problem:
111
is
made up
By simply
varying the cost ratio u/ir, we generate a family of policies that perform well over a wide
range of environments.
Moreover, because the cost ratio can be varied continuously, any
particular point on the tradoff curve of the proposed policy can be achieved; in contrast,
there are sometimes considerable differences in performance between adjacent points on
Ho and
Lau's tradeoff curve.
scenarios.
its
own
The
Finally, our policy
analysis in Sections 3
and 4
is
easily generalizable to
easily extends to the case
service time distribution, waiting cost
(e.g.,
realistic-
where each patient has
and no-show probability. As an example, the
proposed policy can be used to schedule repeated blocks of one long
minute) session followed by two short
more
(e.g.,
approximately 30
approximately 15 minute) sessions, where the
long sessions possess a higher waiting cost and a lower no-show probability.
The primary disadvantage
eight policies considered by
of our policy
is
that
Ho and Lau. However,
it is
more
since this
rather than a control problem, the schedule can to be
difficult to
compute than the
problem
a design problem
is
computed only once and then used
repeatedly thereafter.
Acknowledgment
This research
is
supported by National Science Foundation Grant DDM-9U57297.
References
Bertsekas, D. P.
Hall,
Englewood
Dynamic Programming: Deterministic and Stochastic Models.
Cliffs,
NJ, 1987.
Ho, C. and H. Lau. 1992. Minimizing Total Cost
Management
Prentice-
Science, 38 (1992), 1750-1764.
in
Scheduling Outpatient Appointments.
MIT LIBRARIES
3
TOflO
00flM3T01 7
Date Due
Lib-26-fi7