Document 11044664
advertisement

HD28
I
.M414
[AUG 181988
ALFRED
P.
WORKING PAPER
SLOAN SCHOOL OF MANAGEMENT
DETERMINISTIC CHAOS IN AN EXPERIMENTAL ECONOMIC
SYSTEM
John D. Sterman
July, 1988
WP #2040-88
MASSACHUSETTS
INSTITUTE OF TECHNOLOGY
50 MEMORIAL DRIVE
CAMBRIDGE, MASSACHUSETTS 02139
j;m
I
DETERMINISTIC CHAOS IN AN EXPERIMENTAL ECONOMIC
SYSTEM
John D. Sterman
July, 1988
WP //2040-88
MIT. LIBRARIES
"3
1
6 1988
VH)
D-3976
Deterministic Chaos in an
Experimental Economic System
John D. Sterman
Massachusetts Institute of Technology
Sloan School of Management
Cambridge,
02139
MA
July 1988
comments of Richard Day, Christian Kampmann, Edward
Lorenz, Ilya Prigogine, James Ramsey, Rebecca Waring, and particularly Erik
Mosekilde are gratefully acknowledged. The usual exemption applies.
The
contributions and
D-3976
Abstract
An
experiment with a simulated macroeconomic system demonstrates that the
decision-making processes of agents can produce deterministic chaos.
capital investment in a simple multiplier-accelerator
systematically suboptimal.
prior studies of
A
model of
managed
economy. Performance, however, was
the subjects' decision rule
is
proposed and related
dynamic decision making. Econometric estimates show the model
excellent representation of the actual decisions.
The estimated
evaluate the stability of the subjects' decision processes.
rules are stable, approximately
multiples, and chaos.
structure.
Subjects
40%
is
to
an
rules are then simulated to
While the majority of the estimated
yield a variety of dynamics including limit cycles, period
Analysis of the parameter space reveals a complex bifurcation
Implications for models of
dynamics are explored.
human systems and experimental
studies of
economic
D-3976
1.
Introduction: coupling nonlinear dynamics and experimental economics
Recent work
mode
in the physical sciences
has shown deterministic chaos to be a
of behavior in dynamic systems, thus stimulating the search for chaos and other highly
nonlinear
phenomena
in
human
social
and economic
settings.
Indeed, there has been a near explosion of models
systems.
and empirical studies which seek
to
show
the relevance of nonlinear
be divided roughly into
(1) theoretical
which seek evidence of chaos
studies
Theoretical studies include the
in
human
A
systems.^
in
economic
(2) empirical
data.
work of Day (1982), Dana and Malgrange (1984),
Stutzer (1980), and
survey of these studies suggests the following generalizations.
standard models, both micro- and macroeconomic,
nonlinearities, can be
shown
in
This robust literature can
models of nonlinear dynamics, and
Grandmont (1985), Rasmussen and Mosekilde (1988),
1).
dynamics and chaos
Several journals have devoted special issues to chaos and
models of nonlinear, disequilibrium dynamics
note
common
to contain
when modified
many
First,
others (see
many
to include realistic
regimes of chaos and other nonlinear phenomena such
as mode-locking, period multiples, and quasiperiodicity.
Benhabib and Day's (1981) studies
of such simple models lead them to "expect the possibility of erratic [chaotic] behavior for a
wide variety of dynamic economic models involving
Subsequent work has borne out
this
conjecture
-
rational decision-making with feedback."
the possibility of chaos does not
depend on particular behavioral assumptions but on more fundamental
most models of nonlinear dynamics have been purely
theoretical,
properties.
seem
to
However,
and have not involved
econometric estimation of the parameters. The few exceptions have found the estimated
parameters
lie
well outside the chaotic regime, e.g. Candela and Gardini (1986) and
Malgrange (1984). As Day and Shafer (1985, 293)
Dana and
note,
"Whether or not we can construct empirical models that offer convincing explanation of real world
macro activity [in terms of deterministic chaos] is an open question: most economists would probably
agree that we are as yet quite far from a definitive answer to it. What we know now. ..is that among
the empirical phenomena that we can hope to explain. ..are stochasticlike fluctuations in economic data.
Moreover, we need not expect that exotic assumptions or bizarre model structures will be required"
(emphasis in original).
D-3976
The
and theoretical focus of the models
relative simplicity
early exploration of
new concepts and
is
However, the
analytical tools.
leaves unanswered questions about the relevance of these models.
behavior of actual agents?
Do
entirely appropriate to the
the chaotic regimes in the
models
theoretical
Can chaos
lie in
work
arise
to date
from the
the realistic region of
parameter space, or are they mathematical curiosities unrealized in actual economic systems?
The empirical
evidence of chaos
in
literature has
economic
techniques originally applied
sought to answer these questions by searching for
data.
in
This literature
is
notable for the clever adaptation of
physical settings, such as the Takens (1985)
method
for
recovering low-dimensional attractors from a single time series, the Wolf, Swift, Swinney,
and Vastano (1985) technique for estimation of Lyapunov exponents from experimental time
series,
and the Grassberger-Procaccia (1983) correlation dimension.
tantalizingly suggestive but inconclusive.
The
results are
Brock (1986) demonstrates a method
to test the
hypothesis of chaos in economic data against explicit alternative hypotheses, but finds "that
there
is
not enough information available in U.S. real
GNP,
real gross private
investment, and Wolfer's sunspot series. ..to reject the null hypothesis
were] generated by an AR(2) process."
as the sensitivity of the
orbit, the
that.. .[these series
Chen (1988) and Bamett and Chen (1988),
however, find evidence of low dimensional strange attractors
U.S. monetary aggregates.
domestic
in
some but not
all
measures of
Their conclusions are tempered, however, by uncertainties such
methods used
(unknown) magnitude and
number of data
to the
statistical
points, the
number of
points per
character of process noise, and the (unknown)
magnitude and character of measurement error [Ramsey and Yuan (1987)]. Brock (1986,
192) concludes
"It is
not enough
when you
are working with short data sets to report
dimension and positive Lyapunov exponents
data" (emphasis in original).
to
make
the case for deterministic chaos in your
Ramsey, Sayers, and Rothman (1988) have
significant biases in calculations of correlation dimension caused by small
conclude "that while there
processes, there
is
virtually
is
low
identified
sample size and
abundant evidence for the presence of nonlinear stochastic
no evidence
at the
moment
for the presence of simple chaotic
D-3976
attractors of the type that
have been discovered
The prevalence of chaos
in the
in the
physical sciences."
models but low power of aggregate
statistical tests
motivates a complementary approach based on laboratory experiments with simulated eco-
nomic systems. The pioneering work of Smith (1982, 1986),
Plott (1986),
demonstrated that many economic theories can be successfully tested
paper applies these techniques
to the investigation
in
in the laboratory.
economic systems.
macroeconomic system,
the results of an experiment with a simulated
plier-accelerator model.
of chaos
and others has
In the experiment, subjects play the role of
I
This
report
specifically a multi-
managers of the
capital-
producing sector of an economy. Each time period they must make a capital investment
The
decision.
task of the agents
system with time
subjects
making.
is
is
to
manage
lags, multiple feedbacks,
a
complex dynamic system
and nonlinearities.
systematically suboptimal, suggesting the use of a
A
model of
the subjects' decision rule
is
I
show
in disequilibrium, a
that the behavior
common
proposed. The model
of the
heuristic for decision
well grounded in
is
the literature of economics, psychology, and behavioral decision theory.
Econometric
estimation shows the decision rule explains the agents' behavior well.
Next the estimated
decision rules are simulated, and
it is
unstable behavior, including chaos.
to contain a
complex bifurcation
shown
that
approximately
The parameter space of
structure.
actual decision processes of agents in a
40%
of the agents produce
the system
is
mapped and shown
Thus experimental evidence
is
adduced
common economic
that the
context can produce chaos.
Limitations of the method, implications, and suggestions for future research are discussed.
2.
The Model
The experiment
is
fully described in
capital producing
Goodwin (1951,
...that actual,
reality that
are
is
based on a simple model of the capital investment accelerator and
Sterman (1988a). The model creates a two-sector economy with a
and goods producing
The focus
is
the capital investment accelerator.
4) notes that the traditional acceleration principle
seldom
two good reasons.
assumes
is maintained at the desired relation with output.
We know in
being now too much and now too little capital stock. For this there
The rate of investment is limited by the capacity of the investment goods
realized capital stock
it is
sector.
so, there
4
D-3976
extreme there is an even more inescapable and effective limit. Machines, once
made, cannot be unmade, so that negative investment is limited to attrition from wear.. ..Therefore
capital stock cannot be increased fast enough in the upswing, nor decreased fast enough in the
downswing, so that at one time we have shortages and rationing of orders and at the other excess
capacity with idle plants and machines.
industry.... At the other
A
single factor of production (capital plant and equipment)
is
considered.
The model
includes,
however, an explicit representation of the capital acquisition delay (construction lag) and the
As
capacity of the investment goods sector.
not necessarily equal, and at any
construction.
moment
a result, orders for and acquisition of capital are
there will typically be a supply line of capital under
For simplicity, the demand for capital of the goods-producing sector
exogenous, and there
is
no representation of
The model allows
the
consumption multiplier.
Thus production P
for variable utilization of the capital stock.
lesser of desired production
is
P* or production capacity C. Capacity
is
is
the
proportional to the
capital stock, with capital/output ratio k:
Pt =
MIN(P*„Ct)
(1)
Ct = Kt/K.
The
capital stock of the capital sector
depreciation D.
The
(2)
The average
Kt^l
=Kj
Dt =
Kt/T.
is
augmented by acquisitions
lifetime of capital
is
given by
A
and diminished by
x:
+ (Aj-Dj)
(3)
(4)
acquisition of capital by both the capital and goods sectors
(A and AG) depends on the
supply line of unfilled orders each has accumulated (the backlogs
of the backlog delivered that period
(J)
B and BG) and
(the suffix 'G' denotes a variable
the fraction
of the goods-
producing sector):
A, =
Bf4)t
(4)
AGt
= BGt•(^,
(5)
<l>t
= Pt/P*t
(7)
P*t = Bi +BGt.
Each period both
the capital and
(8)
goods sectors acquire the
full
supply line of unfilled orders
D-3976
unless the capital sector
so that
P*>C,
unable to produce the required amount. If capacity
and shipments
<t)<l
the formulation for
The
is
<J)
implies that
to
each sector
A+AG=P
fall in
that the lag in acquiring capital
ensuring that output
at all times,
capital acquisition lag A=l/()).
however,
<\>
and
falls
The supply
A
may be
Normally,
<\>=\
variable.
Note
It is
easily
and A=l period.
each sector
is
that
conserved.
and the constraint on production
shown
that the average
If capacity is inadequate,
lengthens as the backlogs of unfilled orders
lines of unfilled orders for
insufficient
proportion to the shortfall.
explicit representation of the construction supply line
mean
is
B and BG
grow
are
relative to output.^
augmented by orders
by each sector and emptied when those orders are delivered:
for capital placed
Bui =Bt
+ (Ot-Ai)
(8)
BGt+i - BGt + (OGfAGt).
(10)
Orders placed by the goods sector are an exogenous input to which the subjects of the
experiment must respond by ordering an appropriate amount of capital for their
own
use:
OGt = exogenous
(11)
Oj = determined by
subject.
(12)
Equations (1)-(12) thus define a third-order nonlinear difference equation system.
The system has
(1) divides the
point
P* =
C
the interesting property that the nonlinear capacity utilization function of eq.
system into two
lies
properties of the
distinct regimes, (^=\
and
(}><1.
Furthermore, the equilibrium
exactly at the boundary. Considering each region in turn reveals interesting
open loop system.
When P*=P<C,
0=1, and the system
is
linear:
Kl+1
Bui
Bt
BGt.i
BGi
1
OG,
(13)
1
Excess capacity implies each sector receives the quantity ordered after one period.
the system in this regime
is
always
stable.
The
capital stock
depreciates with lifetime T towards an equilibrium of T-0).
is
BG
Note
controllable via orders
is
not controllable
O
- when
that
(it
D-3976
there
excess capacity, the goods-producing and capital-producing sectors are decoupled.
is
When
capacity
is
inadequate, however,
P*>P=C,
Linearizing the system around the operating point (K, B,
^= (K/K)/P*
(})<1,
BG) and
yields
l-i.-L
kP*
T
<t>
=^
P*
P*
B
kP*
p*
P*
BG
kP*
p*
and the system
Kt
defining
is
nonlinear.
P* = B-i-BG and
D-3976
seminal work of Smith (1982) and Plott (1986). The experimental protocol used here
described in Sterman and
version of the model
is
Meadows
(1985) and Sterman (1987, 1988a).
developed and analyzed
in
A
is
continuous time
Sterman (1985). For the experiment
has
it
been converted to discrete time. Simulation and formal analysis confirm that the conversion
dynamics of the system [Rasmussen, Mosekilde
to discrete time does not alter the essential
and Sterman (1985), Sterman (1988b)]. The experiment
microcomputers.
A
'game board'
is
is
implemented on
IBM
PC-type
displayed on the screen and provides the subjects with
perfect information. Color graphics and animation highlight the flows of orders, production,
and shipments to increase the transparency of the structure (figure
pressure
1).^
was imposed. The parameters (k=1 and x=10) were chosen
to
No
overt time
minimize the
computational burden imposed on the subjects, while remaining close to the original values.
The
students in
subject population (N=49) consisted of
MIT
undergraduate, master's and doctoral
management and engineering, many with extensive exposure
control theory; scientists and economists from various institutions in the
to
economics and
US, Europe, and
the
Soviet Union; and business executives experienced in capital investment decisions including
several corporate presidents and
CEOs.
Subjects are responsible for only one decision -
of the subjects in making these decisions
score S
is
is
to
how much
minimize
capital to order.
total costs.
The
The goal
cost function or
defined as the average absolute deviation between desired production P* and
production capacity
C
over the
T i>eriods
of the experiment:
T
S-(})S|P*t-Cj.
(16)
t=0
The
cost function indicates
how
well subjects balance
penalized equally for both excess
demand and excess
demand and
supply.
supply.
Subjects are
Absolute value rather than
quadratic or asymmetric costs provide an incentive to reach equilibrium while minimizing the
complexity of the subjects' decision-making
task.
A
caveat:
monetary rewards were not
D-3976
used, in violation of Smith's (1982) protocol for experimental microeconomics.
While many
economists argue that significant performance-based rewards are necessary to establish
external validity, a
number of experiments
in
preference reversal [Grether and Plott (1979),
Slovic and Lichtenstein (1983)] suggest performance
Similar experiments have found
levels.
performance, though the further study
weak
is
is
not materially affected by reward
or even negative effects of incentives on
needed [Hogarth and Reder (1987)]. Other
experiments in dynamic decision making suggest the results are robust with respect to
Sterman (1988c) describes an
significant variations in the experimental environment.
experiment with a simulated production-distribution system
used.
in
which financial rewards were
Like the model here, the experimental system contained multiple feedbacks,
nonlinearities,
information
and time
set,
lags.
Yet despite large differences
in the
experimental cover story,
incentives, time pressure, and complexity of the underlying system, the
results strongly reinforce those of the present
experiment and support the same decision rule
tested here, suggesting the relative insensitivity of the subjects to incentives
dynamic structure of
Other studies of dynamic decision making which generally
the system.
support the results here include Brehmer (1987) and
4.
and the
MacKinnnon and Wearing
(1985).
Results
The
trials
reported below were run for 36 periods. All were initialized in equilibrium
with orders of 450 units each period from the goods sector and capital stock of 500 units.
Depreciation
is
therefore
50
each period to compensate.
to capacity,
the only
and yielding an
exogenous input
the third period
input
is
OG
rises
50
units per period, requiring the capital sector to order
By
eq. (8) desired production then equals
initial
cost of zero. Orders for capital
to the system,
from 450
remain constant
to 500,
and remains
at
at
450
500
450
-f-
units
50, exactly equal
from the goods sector OG,
for the first
two periods.
thereafter (figure 2).
The
In
step
not announced to the subjects in advance.
Several
the sample.
trials
Trial 16
representative of the sample are plotted in figure 3; table
is
typical.
The
1
summarizes
subject reacts aggressively to the increase in
demand by
D-3976
The
ordering 150 units in period
2.
leading the subject to order
still
level of
demand,
increase in orders further boosts desired production,
more.
Because capacity
is
inadequate to meet the higher
unfilled orders accumulate in the backlog, boosting desired production to a
peak of 1590 units
in
period
The
6.
fraction of
demand
satisfied
({)
drops to as low as 52%,
slowing the growth of capacity and frustrating the subject's attempt to satisfy demand. Faced
with high and rising demand, the subject's orders reach 500 in the
periods 7 and 8 capacity overtakes demand.
Desired production
A
unfilled orders are finally produced and delivered.
The
peak of over 1600
units.
declines through discards for the next 12 periods.
undershoot
its
trials are
much
remarkably similar. As shown
5.
falls precipitously as the
Orders placed previously continue to
Orders drop to zero, and capacity then
Significantly, the subject allows capacity to
equilibrium value, initiating a second cycle of similar amplitude and duration.
The other
oscillations.
Between
huge margin of excess capacity opens up.
subject slashes orders after period 5, but too late.
arrive, boosting capacity to a
fifth period.
Only 4
subjects
the same.
While
specifics vary the pattern of behavior is
in table 1, the vast majority
of subjects generated significant
(8%) achieved equilibrium before the end of the
trial.
Proposed decision rule and estimation results
The
qualitative similarity of the results suggests the subjects, though not behav-
ing optimally, used heuristics with
used
and
in the original simulation
is
a variant of rules long used in
determines orders for capital
O
features.
The decision
model upon which the experiment
(1939), Metzler (1941), Holt et
firm.
common
al.
is
rule
proposed here was
based [Sterman (1985)]
models of corporate and economic systems [Samuelson
(1960), Forrester (1961),
as a function
Low
(1980)].
The
rule
of information locally available to an individual
Such information includes the current desired
rate of production P*, current production
capacity C, the rate of capital discards D, the supply line
SL
of orders for capacity which the
firm has placed but not yet received, and the capital acquisition lag A:
Ot=/(P*t,Ct,Dt, SLt.At).
Specifically, capital orders
O are given
(17)
by replacement of discards modified by an adjustment
D-3976
for the
10
adequacy of the capital stock
ASL. Accounting
AC
and an adjustment for the adequacy of the supply
for the nonnegativity constraint
line
on gross investment and allowing for an
additive disturbance E yields:
Ot = MAX(0, Dt + ACt + ASLt +
Each of
the three terms represents a separate motivation for investment.
existing capital stock at
firm
is
(18)
Et).
assumed
pressures.
its
To
maintain the
current value, the firm must order enough to replace discards.
to adjust orders
The adjustment
above or below discards
for capital
the desired and actual capital stock.
AC
in
The
response to two additional
represents the response to discrepancies between
The adjustment
response to the quantity of capital in the supply
for supply line
line, that is, capital
ASL
represents the
which has been ordered
but not yet received.
The adjustment
capital stock
DK
for capital
is
assumed
to be proportional to the
and the actual stock. Desired capital
is
gap between desired
determined from the desired rate of
production P* and the capital/output ratio k:
ACt = aK(DKt - Kt
(19)
DKt=KP*t
(20)
The adjustment
for capital creates a straightforward negative feedback loop.
When
production exceeds capacity orders for capital will rise above discards until the gap
An
excess of capital similarly causes orders to
falls to
meet the desired
level.
fall
below replacement
desired
is
closed.
until the capital stock
Note, however, that due to the capital acquisition lag
this
negative loop contains a significant phase lag element, introducing the possibility of
oscillatory behavior.
The aggressiveness of
adjustment parameter
The adjustment
the firm's response
is
determined by the
a^^.
for the supply line
is
formulated analogously. Orders are adjusted in
proportion to the discrepancy between the desired supply line
ASLt = asL(DSLt
-
SLt
DSL
and the actual supply
(21)
).
In general the supply line of unfilled orders
line:
may
include several stages of the capital
D-3976
11
acquisition process such as orders in planning, orders in the backlog of the supplier, and
orders under construction.
orders B, thus
SL=B. The desired supply
DSLt = Dt
To
In the experiment these are aggregated into the backlog of unfilled
line
given by
is
(22)
-At-
ensure an appropriate rate of capital acquisition a firm must maintain a supply line proporIf the acquisition
tional to the capital acquisition delay.
order
new
delay rises, firms must plan for and
capital farther ahead, increasing the desired supply line.
The
desired supply line
based on the capital discard rate - a quantity readily anticipated and subject to
tainty.
To
illustrate the logic
capital.
Orders will
line will
fill.
rise
due
If orders in the
little
is
uncer-
of the supply line adjustment, imagine an increase in desired
to the
gap between desired and actual capital stock. The supply
supply line were ignored (OgL =0), the firm would place orders
through the capital stock adjustment, promptly forget that these units had been ordered, and
order them again. The supply line adjustment creates a second negative feedback loop which
reduces orders for
new
struction pipeline,
and boosts orders
capacity
if
the firm finds itself
if
overcommitted
there are too few.
It
also compensates for changes in
the construction delay, helping ensure the firm receives the capital
production.
OgL
firm
is
it
requires to meet desired
reflects the firm's or subject's sensitivity to the supply line.
The decision
mined on
to projects in the con-
rule in equations (18-22)
is
intendedly quite simple.
the basis of information locally available to the firm
itself.
Orders are deter-
Information an individual
unlikely or unable to have, such as the value of the equilibrium capital stock or the cost
minimizing solution
ing process
is
to the nonlinear optimal control
rather simple: capacity
is
built to
problem,
is
not used.
meet current demand. The
The
firm's forecast-
rule includes
appropriate nonlinearity to ensure robust results: orders remain nonnegative even
large surplus of capital.
The
subtleties.
One can
there
is
a
rule also expresses the corrections to the order rate as linear
functions of the discrepancies between desired and actual quantities.
ing rules of firms are
if
more complex, and other work such
as
think of the linear part of the rule as the
Undoubtedly the order-
Senge (1980) considers various
first
term of the Taylor series
D-3976
12
expansion of the more complex underlying investment
documents the
ability
rule.
A
large literature in psychology
of linear decision rules to provide excellent models of decision-making,
even when interactions are known to exist [Dawes (1982), Camerer (1981)].
The
useful to interpret the rule in terms of the cognitive processes of the agents.
It is
ordering rule can be interpreted as an example of the anchoring and adjustment heuristic
Kahnemen
[Tversky and
(1974)].
determine an unknown quantity
the effects of other cues
example, a firm
may
for factors such as
In anchoring
first
anchors on a
which may be
that
known
less salient or
reference point and then adjusts for
whose
For
effects are obscure.
macroeconomic expectations, anticipated competitor
many people
use
it
to be a
pricing, etc.
Studies
widespread heuristic. Indeed, anchoring
inappropriately.
Numerous
situations in
which the adjustments are insufficient or
anchored
meaningless cues [Hogarth (1987)].
to
to
estimate next year's sales by anchoring on current sales and adjusting
have shown anchoring and adjustment
common
and adjustment, a subject attempting
in
studies have
which judgments
is
so
documented
are inadvertently
In the experimental context, the capital
discard rate forms an easily anticipated and interpreted point of departure for the
determination of orders. Replacement of discards will keep the capital stock of the firm
constant at
current level (assuming the capital acquisition delay remains constant).
its
Adjustments are then made in response to the adequacy of the capital stock and supply
No
assumption
is
made
that these adjustments are in
calculate the order rate as given in the equations.
floor,
any way optimal or
line.
that firms actually
Rather, pressures arising from the factory
from the backlog of unfilled orders and disgruntled customers, and from corrmiitments
projects in the construction pipeline cause the firm to adjust
below the level which would maintain the
interpretation
is
status quo.
parallel: replacing discards to
its
investment rate above or
For agents
in the
maintain the status quo
Adjustments based on the adequacy of the capital stock and supply
Again, there
formulae
is
in the
no presumption
is
experiment the
a natural anchor.
line are then
made.
that subjects explicitly calculate the adjustments using the
equations [see e.g. Einhom, Kleinmuntz, and Kleinmuntz (1979)].
to
D-3976
13
The adjustment parameters a^ and a^^
reflect the firm's or subject's
response to
disequilibrium: large values indicate an aggressive effort to bring capacity and the supply line
in line with their desired levels; small values indicate a higher tolerance for, or
discrepancies between desired and actual stocks.
hypothesis that decisions are
made
For both the
real firm
negligence
and the subjects, the
via a heuristic such as the proposed rule
motivated by
is
the observation that the complexity of determining the optimal rate of investment
the abilities of the
To
managers and
the time available to
make
only the two adjustment parameters
test the rule
trial
a^
and Osl need be estimated.
the parameters
maximum
Assuming
0-
the errors e are Gaussian
likelihood estimates of such nonlinear functions are given by
which minimize the sum of squared
Such estimates are consistent and
errors.
asymptotically efficient, and the usual measures of significance such as the
asymptotically valid [Judge et
Estimates for 49
trials
Maximum
were found by grid search of the
parameter space, subject to the constraints a^, CgL ^
white noise then the
overwhelms
decisions [Simon (1982)].
All other data required to determine orders are presented directly to the subjects.
likelihood estimates of the parameters for each
of,
al.
t-test are
(1980)].
together with t-statistics are given in table
ability to explain the ordering decisions of the subjects is excellent.
R2
2.
The model's
varies between
33%
and 99+%, with an overall R^ for the pooled sample of 85%.'* All but two of the estimates of
a^ are
The supply
highly significant.
line
not significantly different from zero in 27.
the estimate of
a^L for 23
subjects
mean 95% confidence band
is
zero.
adjustment parameter
Of course,
zero
is
is
significant in
is
trials,
a legitimate value for Qsl,
The estimates of a^L range from
for the zero estimates
22
.17, less than
4%
and
and
to 4.4 while the
of the range of a^L,
indicating that the 23 zero estimates of ttjL are quite tight.
6.
Simulation of the estimated decision rules
The estimation
jects'
decision-making.
results indicate that the
model
is
a
good representation of the sub-
Sterman (1988a) analyzes the estimated parameters and
several 'misperceptions of feedback'
which are responsible for the
subjects'
identifies
poor performance.
14
D-3976
One of
these
the tendency for subjects to give insufficient attention to the supply line, as
is
indicated by the large
number of small estimates
By
for a^L-
ignoring the supply line subjects
continue ordering even after the construction pipeline contains sufficient units to correct any
stock discrepancy.
tem.
Such overordering
The present concern, however,
and the regimes of behavior
in disequilibrium,
tem
to a
is
is
a
major source of
the relationship
between the estimated parameters
model. Even though the subjects do not behave optimally
in the
one might expect
that their decision rules
low cost equilibrium. Simulation of
The rightmost column of Table
would ultimately
return the sys-
shows
not the case.
the estimated rules
2 indicates the
mode
(61%)
Most of
are stable.
stock in response to the step input.
and one produces period
produce chaos.
performed best
5.
these produce
Seven parameter
The parameters which
The parameters estimated
overdamped behavior of
sets
characterize eleven subjects
for
the capital
produce limit cycles of period
Inspection of table 2 shows that the subjects
in the task
this is
of behavior produced by
simulation of the decision rule with the estimated parameters.
thirty subjects
loop sys-
instability in the closed
1
(22%)
whose parameters
are stable
while those whose parameters produce periodic behavior or chaos
generally had the highest costs.
1-way
ANOVA
achieved by the subjects strongly depend on the
estimated decision rule (p<.01
when
the
confirmed the relationship: the costs
mode produced by
modes were coded
simulation of the
as stable, periodic, or chaotic).
Figure 4 shows time domain and phase portraits for simulations of several sets of
estimated parameters.
To
In all cases the orbits are roughly egg-shaped, with clockwise flow.
explicate the dynamics, consider figure 4a, showing the period
the parameters of subject 18 (.62, .43;
capacity; the locus of such points
capacity and the system
system
is
sector of
is
linear
is
R^ =
and
stable;
above
is
insufficient.
produced by
it
line.
Below
there
is
the line there
is
insufficient capacity
must equal
excess
and the
Given the steady input of orders from the goods
units, the equilibrium point for the
At t=l capacity
limit cycle
In equilibrium desired production
given by the 45°
highly nonlinear and unstable.
500
.86).
1
system as
a
whole
lies at
(555.55, 555.55).
Shipments lag new orders, so the backlogs of the goods sector
D-3976
and
15
Rising desired production induces additional orders from the capital
capital sector grow.
sector, causing rapid increase in desired production.
the capital sector itself to
As
capital stock grows,
backlog
is
shipped
grows rapidly
at
fill all
Capacity, held
down by
orders and the consequent rationing of output, lags behind.
however, new orders placed by the capital sector slow, and the
an increasing pace. Desired production peaks
as the capital sector
is
increasingly able to
orders.
fill
to deliver the entire supply line in
Between t=7 and t=8
sustained only by the exogenous
is
now
large
enough
one period. As desired production plummets, capacity
peak and capital sector orders
its
now
Capacity
at t=6.
capacity overtakes desired production, which falls rapidly since capacity
reaches
the inability of
to fall to zero (t=9).
demand of
the
Desired production
is
then
goods sector (500 units/period). Deprecia-
tion causes capital stock to decline slowly, until at t=15 capital stock has fallen to a level
enough
to
cause the capital sector to place
new
orders.
However, these new orders cause
desired production to rise, and by the next period capacity
demand,
initiating the next cycle.
The dynamics
are the
low
is
once again insufficient
same
to satisfy
for the period multiples and
chaotic solutions, except that the trajectory does not close after one orbit.
The
trajectories
of chaotic systems are sensitive to
nearby points through phase space diverge exponentially
positions balloons out to
fill
the entire attractor.
divergence of neighboring points
(1985)] which
may
is
initial
The
conditions.
routes of
until the initial difference in the
The time average
rate
of exponential
given by the largest Lyapunov exponent L+ [Wolf
et al.
be defined as
L^=lim|log2|xI
(23)
where the separation vector x connects neighboring points
in
phase space.
A
positive
exponent means nearby points diverge and indicates chaos; a negative exponent denotes
convergence of nearby points.
Because the Lyapunov exponents describe the long-term
average behavior of nearby trajectories, any
finite
segment of the behavior may diverge from
D-3976
16
that average, including
temporary reversals of sign.
L+
Nevertheless, a rough estimate of
is
given by the slope of
L^(t)t=log2|x|
(24)
over long intervals. To calculate L^(t)t for each of the estimated decision rules, production
capacity was jjerturbed by one part in a trillion in the 10,0(X)th period.
|x|
was measured
production.
all
in the
Since desired capacity
the
is
sum
of the two backlogs, this output space reflects
Figure 5 shows the evolution of L^(t)t for the
The phase
parameters of subject 16 after the perturbation.
The average slope of L^(t)t
in figure 4.
The magnitude of
chaotic.
of L^ for the subjects
separation vector
two-dimensional space defined by production capacity and desired
three state variables in the system.
shown
The
the
is
is
clearly positive, indicating the system
Lyapunov exponent
whose decision
plot for these parameters
is
approximately
rules are chaotic range
.1
bits/period.
from about
is
The values
.01 to .1 bits/period,
with an average of about .04 bits/period.
The magnitudes of
state of the system,
surement errors
in
the exponents determine the rate at
and hence the
ability to predict its trajectory, is lost.
economic systems [Morgenstem (1963)]
dictability in chaotic systems.
Thus
if
the states of the
not unrealistic measurement error of about
exponent of .04 implies the uncertainty
after only about
factor of
two would delay
these calculations
little in
12%
Mapping
large
dictate severe limits
in the
mea-
on pre-
model economy were known with
would grow
to
fill
the
Lyapunov
the entire attractor
experimental system to roughly 5 orbits.
additional predictability: cutting
measurement
error by a
the complete loss of predictability by less than 2 orbits.
assume no external noise, perfect specification of
estimates of the parameters, and thus represent an upper
7.
The
(3 bits of precision), the average
in the trajectory
75 periods, corresponding
Additional precision buys
which information about the
bound on
the model,
Of course
and perfect
the prediction horizon.
the parameter space
Additional effects of chaos on predictability arise due to uncertainty in the estimated
D-3976
17
Figure 6 locates the modes of behavior of the estimated decision rules in
parameters.
parameter space.
The estimated parameters
are clustered in the region
0<aK<l, 0<asL^l,
with the few outside this region falling approximately along the line cxsL=aK. Consistent with
intuition, the stable decision rules are
confined to the region where aj^
is
small and
a^L
large, while the chaotic decision rules generally involved aggressive stock adjustment
weak supply
line adjustment.
More
aging
still
supply line
stabilizing
more aggressively
Conversely, more aggressive response to the
by constraining orders
as the supply line
More
fills.
formally,
determines the gain of the oscillatory negative feedback loop while ajL controls the
To
order, stabilizing supply line loop.
the sub-
demand, thus exacerbating disequilibrium and encour-
larger orders in future periods.
is
and
aggressive attempts to correct the discrepancy between
the desired and actual capital stock are destabilizing: by ordering
ject induces a larger increase in total
is
test this
regressed on the log of the cost function S.
a^
first-
hypothesis the estimated parameters were
Costs provide a rough measure of instability since
high costs indicate large excursions from equilibrium (standard errors
in parentheses, trial
1
deleted as an outlier):
ln(S) =
5.3
-I-
(.13)
I.TOk- l.lasL,
(.33)
results are highly significant
and
stability.
is
F=16.8
the parameter space as
smooth
as these results suggest?
0<aK^l and 0<asL^l
representing over 40,CX)0 simulations. ^ This region includes
showing
86%
in steps of .005,
of the estimated parameter
that the fluctuating steady state solutions, including the chaotic
solutions, lie in the managerially meaningful region of parameter space.
bifurcation structure
(25)
and confirm the overall relationship between the parameters
Figure 7 maps the parameter space for
sets, clearly
(N=48).
(.30)
The
But
R2=.43,
is
surprisingly structured.
First, the
The
resulting
boundary for the bifurcation from
fixed point to cyclic attractors appears to be a straight line, with stable solutions satisfying
asL >
2.29aK
(.0085)
-
.706,
(.0046)
R2 = .99946
(N=42).
(26)
D-3976
18
Rasmussen, Mosekilde, and Sterman (1985) show
instability at the equilibrium jx)int involves a
is
inadequate
a^ or
(<))<1)
Hopf
that the transition
bifurcation.
the linearized closed-loop system
is
from
local stability to
In the region
oscillatory, but for small values of
large values of a^L. the eigenvalues lie inside the unit circle, producing
behavior and a stable fixed-point attractor.
As
where capacity
the parameters
become
damped
less stable (larger Oj^
or smaller Csl) the eigenvalues cross the unit circle and the system produces expanding
oscillations.
These fluctuations are ultimately bounded by the nonlinearities, particularly the
nonnegativity constraint on orders and the flexible utilization of capacity in equation
(1).
Inside the region of fluctuating steady state solutions, several features are apparent.
Note
first
the striations of periodic behavior
which cut across the space
shallower angle than the stability/instability boundary.
transition to stability
and thinner away from
it.
The bands
at a
somewhat
are thicker near the
Second, note the several large regions
in
which the periodic solutions are very sparse.
Figure 8 magnifies the region .55<aK<.65, .50<asL^.60 by a factor of ten in each
Both the chaotic regions and the bands of periodic behavior are
direction.
still
common
more such
Such
islands.
in the bifurcation
The complexity of
of the parameters
system.
is
characteristic of the fractal boundaries
maps of many systems.
Simple though the model
behaviors.
irregularity
seen to contain
Further magnification (not shown)
irregularly distributed islands of other periodicities.
reveals
now
may have
is, it is
capable of generating a wide array of complex
the parameter space
shows
large qualitative effects on the
that
even small errors
in estimates
mode of behavior produced by
Indeed, the simulations here do not exhaust the possibilities.
the
All the simulations
described here involved no external forcing (goods sector orders for capital were constant).
Larsen, Mosekilde, and Sterman (1988) have
shown
that sinusoidal forcing in
orders (mimicking the effects of the business cycle or other cyclical
modes
goods sector
in the
economy)
causes mode-locking, quasi-periodic solutions, and a devil's staircase to emerge.
D-3976
8.
19
Discussion
It is
the
common
in the social sciences to
dynamics of human systems
that formal rules
assume
decision-making behavior and thus
that
These
are, if not optimal, then at least stable.
show
results
which characterize actual managerial decision making can produce an
extraordinary range of disequilibrium dynamics, including chaos.
Such complexity suggests strong lessons
dynamics.
The experiment shows
including chaos,
lie
modelers of economic and social
for
that the regimes of fluctuating steady-state behavior,
squarely in the middle of the realistic region of parameter space. In
consequence modelers can ignore nonlinear dynamics only
at their peril.
Models of economic
and social dynamics should portray the processes by which disequilibrium conditions are
created and dissipated.
all
They should not assume
times nor that adjustment processes are stable.
are robust in extreme conditions, since
it is
economy
that the
is
near equilibrium
in or
Models should be formulated so
the nonlinearities necessarily introduced
robust formulations that crucially determine the
modes of
the system [see
Day
state
world and the practical significance of chaos must be asked. Chaos
phenomenon which manifests over very long time frames, but many
models are concerned with transient dynamics and nearly
than those used in the analysis of chaotic dynamics.
all
that they
by
(1984)].
At the same time a number of questions regarding the the generalization of
to the real
at
is
the results
a steady-
policy-oriented
with time horizons
much
shorter
For example the simulations here were
run for 10,000 periods or more. Over such extended time horizons the parameters of the
system cannot be considered
static but will
themselves evolve with learning, evolutionary
pressures, and exogenous changes in the environment.
Bakken (1988)]
that subjects begin to learn within just a
parameters of their ordering function.
It
There
is
evidence [Sterman (1988a),
few cycles, modifying the
appears that in the present experiment learning
slowly moves the subjects away from the chaotic region towards the region of
However, the existence of chaos may
itself
hamper
cause-effect relations exist in chaotic systems,
it is
learning.
Even though
stability.
deterministic
impossible to predict the effects of small
D-3976
changes
20
in initial conditions or parameters.
cause and effect by agents
efficiency?
in the
Does such 'randomness' slow
economy and
thus hinder learning or evolution towards
Indeed, does learning alter the parameters of decision rules so that systems
Some
evolve towards or away from the chaotic regime?
a world
the discovery of
whose
'fitness space'
by constantly exploring
contains
many
new pathways, may
argue that chaos
may be
adaptive.
In
local optima, a decision rule that produces chaos,
help a system evolve faster than a stable,
incremental decision making strategy [Prigogine and Sanglier (1987), Allen (1988)].
Chaos places an upper bound on
social systems?
known
that
that
swamp
the uncertainty in trajectories caused
predictability of that response?
boundaries in both
in the
initial
model influence
its
Particularly troubling here
of modes shown
transfer to circumstances
procedure of incremental
a
well
which
in figures 7-8.
differ only slightly.
movement towards
well can agents negotiate that space
is fractal
p)olicies,
does the
and the
condition and parameter space. Policy interventions often imply
parameters of a decision rule or model.
fractal distribution
is
it is
the potential for fractal basin
is
How
can policy analysis be conducted
In such systems parameter changes
on the margin may produce unpredictable qualitative changes
optima but
constraint in
How
by chaos?
response to
the "policy space" contains fractal basin boundaries?
How
bound a binding
such random shocks severely degrade predictability. Does the magnitude of
existence of chaotic regimes in a
if
is
Real social systems are bombarded by broadband noise, and
stochastic shocks
changes
prediction, but
as well?
in behavior, as illustrated
Therefore learning and experience
by the
may
not
Learning often involves a hill-climbing
a profit-maximizing peak in parameter space.
when
the landscape not only has
The development of
many
local
principles for policy design in such systems
major area for future research. The practical significance of chaos and other nonlinear
phenomena
in
policy-oriented models of social and economic behavior remains clouded while
these questions are unanswered.
Some
of these questions
may be
application of the experimental techniques demonstrated here.
resolved by further
D-3976
9.
21
Conclusions
The discovery of nonlinear phenomena such
as deterministic chaos in the physical
world naturally motivates the search for similar behavior
the social scientist faces difficulties in that search which
not to the same degree.
exist for
many
world of human behavior. Yet
do not plague the physicist,
Aggregate data sufficient for strong empirical
of the most important social systems.
from the environment. The huge temporal and
of actors, costs and ethical concerns
difficult at best.
in the
Finally, the laws of
make
tests
at least
simply do not
Social systems are not easily isolated
spatial scales of these systems, vast
controlled experiments
human behavior
number
on the systems themselves
are not as stable as the laws of physics.
Electrons do not learn, innovate, collude, or redesign the circuits in which they flow.
Laboratory experiments appear
to
and national economies are
actual firms
provide a fruitful alternative.
infeasible, simulation
Since experiments on
models of these systems must
be used to explore the decision making heuristics of the agents.
Such experiments create
'microworlds' in which the subjects face physical and institutional structures, information, and
incentives which
mimic
(albeit in a simplified fashion) those
of the real world.
It
appears to
be possible to quantify the decision making heuristics used by agents in such experiments
and explain
their
performance well. Simulation then provides insight into the dynamic
properties of the experimental systems.
These
processes of real people.
common and
produced by the decision making
results demonstrate that chaos can be
The experiment presented
subjects with a straightforward task in a
important economic setting. The subjects' behavior
is
modeled with a high
degree of accuracy by a simple decision rule consistent with empirical knowledge developed
in
psychology and long used
in
significant minority of subjects.
economic models. Simulation of
Chaos may well be
economic systems, despite the lack of
a
the rules produces chaos for a
common mode
of behavior
sufficient information to detect
it
in
in social
aggregate data.
and
22
D-3976
Notes
1
Journal of
(3),
Economic Theory, 40
(1) 1986, Journal of
September 1987; System Dynamics Review,
Economic Behavior and Organization,
4, 1988,
8
European Journal of Operational
Research, 35, 1988. See also Goodwin, Kruger, and Vercelli (1984) and Prigogine and
Sanglier (1987).
2.
Conservation of output requires
By
P=
A
+ AG. But
(P/P*)(B +
BG) =
ratio of the
backlog to the outflow, here given by
P.
BG)/(A + AG) = (B +
3.
Disks suitable for
Little's law, the
BG)/(B-(t)
IBM
A
+
AG
=
B(t)
+ BG({) =
average residence time of items
+ BG<t)) =
A=
in a
(B + BG)/(A + AG).
By
(})(B
+ EG) =
backlog
is
the
eq. 4-5, (B
+
1/<|).
PC's and compatibles, or
for the
Apple Macintosh, are available
from the author.
4.
Note
that the function 0=f(-)
does not contain an estimated regression constant.
Thus
the correspondence of the estimated and actual capital orders, not just their variation around
mean
values, provides an important measure of the model's explanatory power.
residuals e need not satisfy Zct
R2 =
1
-
Xct^
/
ZO,2
is
=
0, the
used (Judge
conventional
et al. 1980).
This
R2
is
not appropriate.
R2 can be
Since the
The
alternative
interpreted as the fraction of
the variation in capital orders around zero explained by the model.
5.
Each simulation was 10,000 periods long. The
steady state
chaotic
if
mode
of behavior.
first
8000 were discarded
10 digit accuracy was used.
the trajectory did not close after 100 orbits.
A
in assessing the
simulation was assumed to be
D-3976
23
References
Dynamic models of evolving systems. System Dynamics Review,
Allen, P., 1988,
Bakken,
B., 1988,
4.
Learning system structure by exploring computer games, presented
at the
1988 International System Dynamics Conference, San Diego, CA, July.
Bamett,
W. and
P.
Chen, 1988, The aggregation theoretic monetary aggregates are chaotic
and have strange
attractors:
Bemdt, and White
(eds.),
an econometric application of mathematical chaos,
in
Bamett,
Dynamic Econometric Modeling, Cambridge University
Press,
Cambridge.
Benhabib,
and R. Day, 1981, Rational choice and
J.
erratic behavior.
Review of Economic
Studies, 48, 459-471.
Brehmer, B., 1987, Systems design and the psychology of complex systems,
and
P.
Zunde
Plenum,
New
(eds). Empirical
in
Rasmussen,
Foundations of Information and Software Science
J.
III,
York.
Brock, W., 1986, Distinguishing random and deterministic systems: abridged version. Journal
of Economic Theory, 40, 168-195.
Camerer,
C,
1981, General conditions for the success of bootstrapping models,
Organizational Behavior and
Human
Performance, 27, 411-422.
Candela, G., and A. Gardini, 1986, Estimation of a non-linear discrete-time macro model.
Journal of
Chen,
P.,
Economic Dynamics and
control, 10, 249-254.
1988, Empirical and theoretical evidence of economic chaos. System Dynamics
Review,
4,
81-108.
Dana, R., and P. Malgrange, 1984, The dynamics of a discrete version of a growth cycle
model, in Ancot,
Nijhoff,
Dawes,
J.
(ed.).
Analysing the Structure of Econometric Models, Martinus
The Hague.
R., 1982,
Kahneman,
The robust beauty of improper
Slovic, and Tversky (eds).
linear
models
in decision
making,
in
Judgment under uncertainty: Heuristics and
biases.
D-3976
24
Press, Cambridge.
Cambridge University
Day, R., 1982, Irregular Growth Cycles, American Economic Review, 72, 406-414.
Day,
Journal of
Day,
Economic Dynamics:
A
Post-Schumpeterian Contribution,
Economic Behavior and Organization,
5,
57-76.
R., 1984, Disequilibrium
R.,
Einhom,
and W. Shafer, 1985, Keynesian chaos. Journal of Macroeconomics,
H., D. Kleinmuntz, and B. Kleinmuntz, 1979, Linear regression
7,
277-295.
and process -tracing
models of judgment. Psychological Review, 86, 465-485.
1961, Industrial Dynamics,
Forrester,
J.
Goodwin,
R., 1951,
The nonlinear
MIT
Press, Cambridge.
accelerator and the persistence of business cycles,
Econometrica, 19, 1-17.
Goodwin,
R.,
M. Kruger, and A.
Vercelli, 1984, Nonlinear
models of fluctuating growth,
Springer Verlag, Berlin.
Grandmont, J.-M., 1985,
On endogenous
competitive business cycles, Econometrica, 53, 995-
1046.
Grassberger,
P.,
and
I.
Procaccia, 1983, Measuring the strangeness of strange attractors,
Physica, 9D, 189-208.
Grether, D., and C. Plott, 1979,
Economic theory of choice and
the preference reversal
phenomenon, American Economic Review, 69, 623-638.
Hogarth, R., 1987, Judgment and Choice, 2nd ed., John Wiley, Chichester.
Hogarth, R., and M. Reder, 1987, Rational Choice: The contrast between economics and
psychology. University of Chicago Press, Chicago.
Holt,
C,
F.
Modigliani,
Force, Prentice-Hall,
Judge
et al.,
1980,
J.
Muth, H. Simon, 1960, Planning Production, Inventories, and Work
Englewood
The Theory and
Larsen, E., E. Mosekilde, and
wave and
J.
Cliffs, N.J.
Practice of Econometrics, Wiley,
York.
Sterman, 1988, Entrainment between the economic long
other macroeconomic cycles, presented at the
Instabilities in
New
IIASA Conference on
Long-Term Economic Growth, Novosibirsk, USSR.
D-3976
Low,
25
G., 1980,
The
multiplier-accelerator
dynamics perspective,
MTT
in
Randers
J.
model of business cycles interpreted from
(ed.),
system
a
Elements of the System Dynamics Method,
Press, Cambridge.
MacKinnon,
A., and A. Wearing, 1985, Systems analysis and
dynamic decision making, Acta
Psychologica, 58, 159-172.
The nature and
Metzler, L., 1941,
stability
of inventory cycles. Review of Economic
Statistics,
23, 113-129.
Morgenstem,
O., 1963,
On
the
Accuracy of Economic Observations, 2nd
ed.,
Princeton
University Press, Princeton.
Plott, C. R.,
1986, Laboratory experiments in economics: The implications of posted price
institutions. Science,
M.
Prigogine, L, and
232
(9
May), 732-738.
Sanglier, 1987,
Laws of nature and human
conduct. Task Force of
Research Information and Study on Science, Brussels.
Ramsey,
J.,
and
evaluation in
Ramsey,
J.,
H.-J.
Yuan, 1987, Bias and error bars
some simple models, New York
C. Sayers, and P. Rothman, 1988,
calculations using small data sets:
in
dimension calculations and
their
University.
The
statistical properties
some economic
applications,
of dimension
RR88-10,
New York
University Department of Economics.
Rasmussen and Mosekilde, 1988, Bifurcations and chaos
in a generic
management model,
European Journal of Operational Research, 35, 80-88.
Rasmussen,
S., E.
Mosekilde and
J.
Sterman, 1985, Bifurcations and chaotic behavior
simple model of the economic long wave, System Dynamics Review,
1,
in a
92-1 10.
Samuelson, P. A., 1939, Interactions between the multiplier analysis and the principle of
acceleration.
Senge,
P.,
1980,
The Review of Economic
A
Statistics, 21,
75-78.
system dynamics approach to investment function formulation and
Socio-Economic Planning Sciences,
14,
269-280.
Simon., H. A., 1982, Models of Bounded Rationality, The
MIT
Press,
Cambridge.
testing,
D-3976
26
and
Slovic, P.
1983, Preference reversals: a broader perspective, American
S. Lichtenstein,
Economic Review,
73, 596-605.
Smith, V. L., 1982, Microeconomic systems as an experimental science, American Economic
Review, 72
,
923-955.
Smith, V. L., 1986, Experimental methods in the political
economy of exchange,
Science, 234,
(10 October), 167-173.
Sterman,
J.
D., 1985,
A
behavioral model of the economic long wave. Journal of
Behavior and Organization,
Sterman,
J.
Sterman,
J.
J.
issues
Science, 33
,
models by direct experiment.
1572-1592.
D., 1988a, Misperceptions of feedback in
Behavior and
Sterman,
6, 17-53.
D., 1987, Testing behavioral simulation
Management
Human
Economic
dynamic decision making, Organizational
Decision Processes, forthcoming.
D., 1988b, Eteterministic chaos in models of
and experimental
results.
human
behavior: Methodological
System Dynamics Review,
4,
148-178.
Sterman, 1988c, Modeling managerial behavior: Misperceptions of feedback in a dynamic
decision making experiment,
Sterman,
J.
Management
D. and D. L. Meadows, 1985,
Science, forthcoming.
STRATEGEM-2:
a microcomputer simulation
game
of the Kondratiev Cycle, Simulation and Games, 16, 174-202.
Stutzer, M., 1980, Chaotic
dynamics and bifurcation
Dynamics and Control,
Takens,
P.,
looss,
2,
in a
macro model. Journal of Economic
353-376.
1985, Distinguishing deterministic and random systems, in Borenblatt, G, G.
and D. Joseph
(eds.).
Nonlinear Dynamics and Turbulence, Pitman, Boston.
Tversky, A. and D. Kahneman, 1974, Judgment under uncertainty: heuristics and biases.
Science. 185 (27 September), 1124-1131.
Wolf, A.,
J.
Swift, H. Swinney, and
J.
Vastano, 1985, Determining Lyapunov exponents from a
time series, Physica, 16D, 285-317.
D-3976
27
Figure
1.
Computer screen showing experimental economy, initial configuration.
The subject is about to enter new orders for capital sector.
Year
Fraction of
Demand
Satisfied
Capital Stock
100
Depreciation
500
Production
Shipments
500
to Capital
Sector
Desired Production
Shipments
500
to
Goods Sector
Backlog of Unfilled Orders
New
New
Orders
50
^Capital Sector;
Capital Sector
450
Goods Sector
Orders
450
V
Goods
Sector,
D-3976
28
Figure
there
2.
is
Exogenous orders of
the
goods
an unannounced step increase in
from 450
to
500
units.
Compare
Each
sector.
new
begins in equilibrium. In period 2
trial
orders placed by the
against subjects' behavior
shown
consumer goods sector
in figure 3.
Units
900
r
600
700
-
600
-
500
-
100
-
300
-
New
Orders
— Consumer Goods Sector
\y
200
100
'
10
'
'
I
20
15
Period
L_I_J
L.
25
30
35
D-3976
29
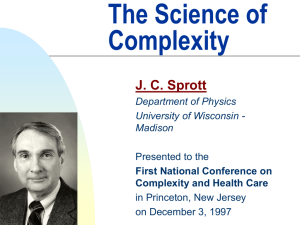
Figure
Typical experimental results. N.B.: vertical scales differ.
3.
Desired Producrion
Production Capacity
Subject's Orders for Capital
Tnei 6 SCORE
•
90S
SCOCE
.
651
Tnil 24 SCORE
t
366
TntI
1
I
20
IS
Parlod
Tn»l 16 SCORE
Unit!
1200
•
*T>
D-3976
30
Table
1.
Summary of
experimental results.
Experiment
(Std.
Dev.
in parentheses)
N=48*
Costs
(units)
Optimal
D-3976
Table
Trial
31
2.
Estimated parameters and
mode
of behavior of simulated decision rules
D-3976
Figure
4.
(figure 3).
1200
-
32
Simulation of estimated decision rules. Note similarity to the experimental results
D-3976
Figure
33
5.
Evolution of log2|x|, the distance between two neighboring trajectories, for
simulation with parameters of subject 16 (2.49, 2.90) after perturbation of capacity by factor of
10vl2
slope,
in
is
period 10,000. The largest Lyapunov exponent, given approximately by the average
positive, indicating that the
two
trajectories diverge exponentially
and the system
chaotic.
="
1600
-,
300
CJ
-10
-I
-20
-
en
o
—
-30
50
00
150
Ti
me
200
250
300
is
D-3976
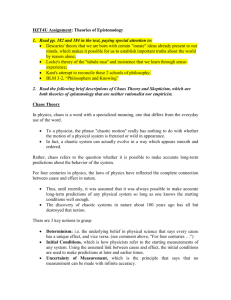
Figure
6.
34
Modes of behavior produced by
simulation of the estimated parameters.
Lower
graph magnifies area bounded by 0<aK<l, 0<asL^l.
Chaos
*
Period
1
Period 5
«
Stable
Chaos
*
Period
1
Period 5
X
Stable
D-3976
35
(Captions for figures 7
Figure
7.
Map
of parameter space for
steps of .005, representing 201
Figure
8.
Map
&
8; figures
on following pages)
0<aK^l and 0<asL^l. Simulations were performed
= 40,401 simulations.
of the region .55<aK<.65, .50<asL^-60 in increments of .0005. Magnifies
figure 7 by a linear factor of 10 in each direction.
Note
the islands of higher periodicities
irregularly distributed within the bands of periodic behavior.
in
36
U-JV/b
i' f''', ''*'p'S''?,¥,>;-i
'^
rElu-Vjrj
".
A
'ft.' j'if''ui'rfri'i,i
I'Ltiji
(JWfi
111
,...-,.„>-.
m\ J
i'd r,
''.Jjsii
r
i
'
p., I,
,
Jn-'it
Ji'i
jh^M)
' V1.F 'ViW-iLff^i
'','t
T
L
'i'
I
L
i
.-
i
^<i
i
.i,
'J
^
t
J
ii
l!
'
l"J"*
I
,*
I
'
I.
^
..
fl
I
all
'i-i
1
Llf
.1
'
-"I',',
«.-.-'
Wi"
,
.
1
J
l^*
''
{
,i'.
n
*
,
.rll- 1-
,
h
,
.
r
I
I
ID
»-
rsi
fo
'rr
tn
eu
"o
-o
"o
n
"o
B
.2
.2
,2
,2
.2
iQ
-t-
-4-
•>-
'^
•—
6i
fl^
^^
,
:^
S o
fa
^
^
d
lO
'"'"l
;,
i"... .--
- FiiMv'-'jTV
"HyMflii-silliks
I
"i I'l
I'l '.' >
,
f
-t
U
-t.i', ;
V
.
' UriWllJB
_,
*
b
1
17
07li
37
D-3976
CTt
MM
3
TDflO
I
IHHflHlFS
DD5
35fl
^Tb