A S machine Nicolas Ollinger (LIFO, Univ. Orléans, France)
advertisement
")
A
Small Minimal Aperiodic Reversible Turing
machine
Nicolas Ollinger (LIFO, Univ. Orléans, France)
joint work with J. Cassaigne, R. Torres and A. Gajardo
Journée GAMoC — June 7th, 2013
Motivation
Solve a conjecture that we had with J. Kari a few years ago:
ѵѵ ѵ
6WLU 7YVISLTZ^P[O JVUQLJ[\YLZ
7LYPVKPJP[`HUK0TTVY[HSP[`PU9L]LYZPISL *VTW\[PUN
1HYRRV2HYP +W[ VM4H[OLTH[PJZ <UP]LYZP[`VM;\YR\ -PUSHUK
5PJVSHZ6SSPUNLY 30-(P_4HYZLPSSL<UP]LYZP[t *59:-YHUJL
*VUQLJ[\YL 0[ PZ \UKLJPKHISL ^OL[OLY H NP]LU JVTWSL[L 29*4
HKTP[ZHWLYPVKPJJVUÄN\YH[PVU WYV]LUPM`V\YLTV]LJVTWSL[LVY
YLWSHJL 2 I` 3
···
*VUQLJ[\YL ;OLYLL_PZ[ZHJVTWSL[L 9;4 ^P[OV\[HWLYPVKPJJVU
ÄN\YH[PVU RUV^UMVY+;4 B)*5D
;VY\lj 7VSHUK·(\N\Z[ *VUQLJ[\YL 0[PZ\UKLJPKHISL^OL[OLYHNP]LUJVTWSL[L 9;4 HKTP[Z
HWLYPVKPJJVUÄN\YH[PVU RUV^UMVY+;4 B)*5D
12HYPHUK56SSPUNLY 7LYPVKPJP[`HUK0TTVY[HSP[`PU9L]LYZPISL*VTW\[PUN
,6JOTHljZRPHUK1;`ZaRPL^PJa,KZ! 4-*: 35*: WW ¶ Theorem To find if a given complete reversible Turing
machine admits a periodic orbit is Σ01 -complete.
1/15
0|1 ð
b
0|1 ñ
1|1 ñ
2|2 ñ
0|2 ð
1|0 ð
p
2|0 ñ
0|2 ñ
1|0 ñ
d
2|0 ð
q
1|1 ð
2|2 ð
1. Dynamics of Turing machines
Turing machines
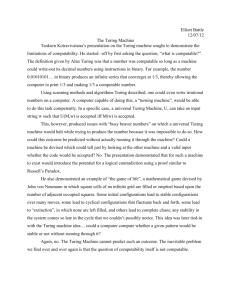
Definition A Turing machine is a triple (Q, Σ, δ) where Q is
the finite set of states, Σ is the finite set of tape symbols and
δ : Q × Σ → Q × Σ × {ð, ñ} is the transition function.
Transition δ(s, a) = (t, b, d) means:
“in state s, when reading the symbol a on the tape,
replace it by b move the head in direction d and enter state t.”
Remark We do not care about blank symbol or initial and
final states, we see Turing machines as dynamical systems.
1. Dynamics of Turing machines
2/15
Moving head dynamics
XH
TH
= Q × Z × ΣZ ∪ ΣZ
:
Hergé. On a marché sur la lune. Casterman, 1954.
XH → XH
· · · 000000b000000000· · ·
· · · 0000001d00000000· · ·
· · · 000000b110000000· · ·
· · · 0000001p10000000· · ·
· · · 00000010d0000000· · ·
· · · 0000001b01000000· · ·
· · · 00000011d1000000· · ·
· · · 0000001q11000000· · ·
· · · 000000b101000000· · ·
· · · 0000001p01000000· · ·
.
.
.
1. Dynamics of Turing machines
Long shot
3/15
Moving tape dynamics
XT
TT
= Q × ΣZ
:
XT → XT
· · · 0000000b00000000· · ·
· · · 0000001d00000000· · ·
· · · 0000000b11000000· · ·
· · · 0000001p10000000· · ·
· · · 0000010d00000000· · ·
· · · 0000001b01000000· · ·
· · · 0000011d10000000· · ·
· · · 0000001q11000000· · ·
· · · 0000000b10100000· · ·
· · · 0000001p01000000· · ·
.
.
.
1. Dynamics of Turing machines
Hergé. On a marché sur la lune. Casterman, 1954.
Tracking shot
4/15
Trace subshift
Hergé. On a marché sur la lune. Casterman, 1954.
ST ⊆ (Q × Σ)ω
0011001110
b d b p d b d q b p ···
Point of view shot
1. Dynamics of Turing machines
5/15
Simple dynamical properties
Definition A point x ∈ X is periodic if it admits a period
p > 0 such that T p (x) = x.
Definition A machine is periodic if every point is periodic.
Remark Periodicity implies uniform periodicity: T p = Id.
Theorem[KO08] The periodicity problem is Σ01 -complete.
Definition A machine is aperiodic if it has no periodic point.
1. Dynamics of Turing machines
6/15
Partial vs complete machines
Definition A TM is complete if δ is completely defined,
otherwise undefined transitions of a partial δ correspond to
halting configurations.
Definition A point is mortal if it eventually halts.
Thm[Hooper66] The immortality problem is Π10 -complete.
Rk Mortality is different from totality which is Π20 -complete.
Thm[KO08] The result is the same for reversible TM.
1. Dynamics of Turing machines
7/15
0|1 ð
b
0|1 ñ
1|1 ñ
2|2 ñ
0|2 ð
1|0 ð
p
2|0 ñ
0|2 ñ
1|0 ñ
d
2|0 ð
q
1|1 ð
2|2 ð
2. Reversible Turing machines
Reversible Turing machines
Intuitively, a TM is reversible if there exists another TM to
compute backwards: “T2 = T1−1 ”. Forget technical details. . .
Definition A TM is reversible if δ can be decomposed as:
δ(s, a) = (t, b, ρ(t))
ρ
:
Q → {ð, ñ}
σ
∈ SQ×Σ
where (t, b) = σ (s, a)
Remark δ−1 (t, b) = (s, a, (ρ(s)))
2. Reversible Turing machines
8/15
A complete RTM
0|1 ð
b
1|0 ð
b
0|1 ñ
1|0 ñ
1|1 ñ
2|2 ñ
0|2 ð
1|0 ð
1|1 ñ
2|2 ñ
p
2|0 ñ
0|2 ñ
1|0 ñ
d
2|0 ñ
0|1 ñ
p
0|2 ñ
2|0 ð
q
q
1|1 ð
2|2 ð
state/symbol permutation.
d a q
2. Reversible Turing machines
1|1 ð
2|2 ð
0|2 ð
p
0|2 ñ
its own inverse up to
b a p
d
0|2 ð
It is time-symmetric:
1 a 2
2|0 ð
0|1 ð
1|1 ñ
2|2 ñ
0|1 ð
2|0 ð
b
1|0 ñ
0|1 ñ
2|0 ñ
q
1|0 ð
d
1|1 ð
2|2 ð
9/15
Searching for a reduction
We want to prove the following:
Theorem To find if a given complete reversible Turing
machine admits a periodic orbit is Σ01 -complete.
In the partial case we use the following tool:
Prop[KO08] To find if a given (aperiodic) RTM can reach a
given state t from a given state s is Σ01 -complete.
2. Reversible Turing machines
10/15
The partial case
Principle of the reduction Associate to an (aperiodic) RTM
M with given s and t a new machine with a periodic orbit if
and only if t is reachable from s.
s
M
t
M−1
s
We need to find a way to complete the constructed machine.
2. Reversible Turing machines
11/15
0|1 ð
b
0|1 ñ
1|1 ñ
2|2 ñ
0|2 ð
1|0 ð
p
2|0 ñ
0|2 ñ
1|0 ñ
d
2|0 ð
q
1|1 ð
2|2 ð
3. a SMART machine
Cassaigne machine
Conj[Kůrka97] Every complete TM has a periodic point.
Thm[BCN02] No, here is an aperiodic complete TM.
Rk It relies on the bounded search technique [Hooper66].
In 2008, I asked J. Cassaigne if he had a reversible version of
the BCN construction. . .
. . . he answered with a small machine C which is a reversible
and (drastic) simplification of the BCN machine.
3. a SMART machine
12/15
Aperiodicity
Proposition The machine C is aperiodic.
Idea of the proof (R. Torres)
1. The behavior starting from a tape of 0 is aperiodic;
2. Every block of 0 eventually grows;
3. Thus C is aperiodic.
3. a SMART machine
13/15
Minimality
The behavior of C can be precisely described (R. Torres).
Proposition The behavior starting from a tape of 0 is dense.
Proposition The trace subshift of C is minimal.
Proposition The trace subshift of C is substitutive.
3. a SMART machine
14/15
0|1 ð
b
0|1 ñ
1|1 ñ
2|2 ñ
0|2 ð
1|0 ð
p
2|0 ñ
0|2 ñ
1|0 ñ
d
2|0 ð
q
1|1 ð
2|2 ð
4. Embedding the machine
Embedding trick
v1
s
Use the transitions
of the Cassaigne
machine to connect
the u0i to the ui and
the vi0 to the vi .
M
t
M−1
s
u01 u02 u03
u1 u2 u3
s
t
M
v10
4. Embedding the machine
v2
M−1
s
v20
15/15
0|1 ð
b
0|1 ñ
1|1 ñ
2|2 ñ
0|2 ð
1|0 ð
p
2|0 ñ
0|2 ñ
1|0 ñ
2|0 ð
q
1|1 ð
2|2 ð
d
Table of contents
1. Dynamics of Turing machines
2. Reversible Turing machines
3. a SMART machine
4. Embedding the machine