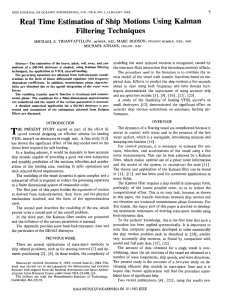
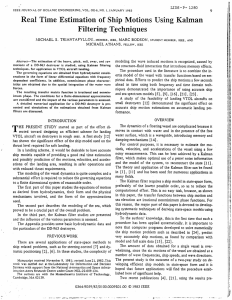
MAY 1982 LIDS-P- 1.204 REAL TIME ESTIMATION OF THE HEAVING AND PITCHING
advertisement

MAY 1982
LIDS-P- 1.204
REAL TIME ESTIMATION OF THE HEAVING AND PITCHING
MOTIONS OF A SHIP USING A KALMAN FILTER
by
MICHAEL TRIANTAFYLLOU
MICHAEL ATHANS
LABORATORY FOR INFORMATION AND DECISION SYSTEMS
MASSACHUSETTS INSTITUTE OF TECHNOLOGY
CAMBRIDGE, MASSACHUSETTS 02139
Reprinted from Proc. OCEANS' 81, Boston Mass., September 1981.
Research Supported by NASA Ames and Langley Research Center
under grant NGL-22-009-124.
REAL TIME ESTIMATION OF THE HEAVING AND PITCHING
MOTIONS OF A SHIP, USING A KALMAN FILTER
Michael Triantafyllou
Michael Athans
Ocean Engineering Dept.,
Electrical Engineering and
Computer Science Dept.,
and Laboratory fcr Information and Decision Systems
Massachusftts Institute of Technology
ABSTRACT
for application in the real time estimations of the motions, velocities and
accelerations using Kalman filter techniques. Only two measurements are assumed
available, the heave and pitch motion.
Real time ship motion estimation is of
interest to naval ship operators for
vertical aircraft landing, as well as
to the offshore industry for installing
rigs and transferring equipment in
rough seas.
2. EQUATIONS OF MOTION
2a. Definitions
In the present study the estimation of
the heave and pitch motion of a ship is
considered, using Kalman filtering techniques. A significant part of the study
is devoted to constructing appropriate
models for the sea and the ship.
The rigid body motions of a ship in six
degrees of freedom are shown in Figure 1:
We define the xlzl plane to coincide with
the symmetry plane of the ship, with the
z! axis pointing vertically upwards, and
the Yl axis to port, so as to obtain an
orthogonal right-hand system. Then the
linear motions along the xl,yl,zl axes
are surge, sway and heave respectively.
We consider small motions so that the tensor of angular displacements can be replaced by a vector of small angular displacements, which are roll, pitch, yaw
around the xl,yl,zl axes respectively.
The assumption of small wave induced motions is justified, given the large mass
of the vessel and the small wave amplitude
to length ratio. Very good predictions
have been obtained
in the literature using this assumption C5 J.
The governing equations are obtained
from hydrodynamic considerations in the
form of linear differential equations
with frequency dependent coefficients.
In addition, non-minimum phase characteristics are obtained due to the spatial integration of the water wave
forces.
The resulting transfer matrix function is
irrational and non-minimum phase. The conditions for a finite-dimensional approximation are considered and the impact of
the various parameters is assessed. A
numerical application is considered for a
DD-963 destroyer.
2b. Derivation of the Equations of Motion
1. INTRODUCTION
The real time estimation of the ship motions, velocities and accelerations is
very important for applications in rough
seas, such as the landing of aircraft or
helicopters on shins, the transfer of
cargo, or heavy equipment at sea and offshore rig Installation.
In a study on the vertical landing *E
aircraft on destroyers, it was found that
the modeling of the ship motions plays a
very important role in any automatic landing control scheme £4 J.
In the present study the accurate finite
dimensional modeling of the heave and
pitch motions of a ship is
The complex problem of wave induced motions can be simplified within linear
theory as follows: The incident waves are
diffracted by the vessel, while waves are
radiated away from the ship as she oscillates. The diffraction waves can be
found by assuming the vessel motionless
within the incident waves, while the radiation waves are found by oscillating the
vessel in calm water t 53. The force caused by the incident ai.d diffraction waves
is called the exciting force and can be
separated in the part caused by the incident waves (Froude-Krylov force) and the
diffraction force. The force caused by
the radiation waves is proportional to the
motion amplitude so if the motion is
considered,
x(t) - x0e
1090
CH1685-7/81/0000t-1090 $00.75 0
1981 IEEE
(1)
with xo complex, then the radiation
force is
F rt) - T(Wo)xlo
e
2c. Speed Effects
When the ship is heaving with a small
angle 0 and at the same time is moving
forward with speed U, then a heave velocity
U0. The
effect
city results,
results, which
which is
is Af - U.
The effect
of the forward speed, therefore, is to
couple
decouple the
the various
variou tmotions
As it by
canspeed
b
found
(2)
The frequency dependent constant T()
can be proved to include the hydrostatic
terms, terms modeling the energy loss due
to the outgoing waves (damping terms),
and terms representing the inertia of
andthe
thded ietim
the etermsirepresentin
entrained fluid (added
masss terms)
tC 13.
1]. For
For this
this reason
reason we
we can
can rewrite (2)
~~~~~~as
as
pressions for the added mass, damping and
exciting force with a parametric depenexciting force with a parametric depenon the speed U.
rewrite (2)
~~~~dence
xt)
-B(.)
-A(~o) t)
X(t)-A(Wo)
-B(vo) x(t)
x(t) -- C2d.
Cx(t)
F r(t)
r2 )
where
where the fadded mass A( ) and damping
B('w) are frequency dependent, because
the.~~~~~
.
.
'then
the radiation waves are different at
various frequencies.
The exciting force can be written as
F (t) - Fo(wO)eiwot
(3)
r
so by Newton's law
Ixow2
0eiwot = [Fo(wo)+EA(wo) W2
2
-xxo~ 0e=
{F0 (w0 )+[A(w 0)W
0
(-CM+A(w0 )3] 2 0 + iWOB(Wo)
+C}xO _ F0o(W)
(4a)
Ultimately, we wish to obtain the response in a random sea, so equation(4a)
must be extended for a random sea. This
can be. done by obtaining the inverse
Fourier transfrom of (4), i.e.
X.
) X (T)dT+ ? K (t-'
)
Frequency of Encounter
the
An additional effect of the ship speed is
the change in the frequency of encounter.
If the incident wave has a frequency W
the frequency of encounter X
is,
e
2
W - U cos~
(7)
e
c
Although the exciting force changes with
frequency W , its value is the same as if
the frequency were w (plus any speed dependent terms).
_
iAo B(Io) - C3 xo}eit
(4)
Wo
(4)
B~wo)
C3
xo
e
iw 0 t
By dropping e
, we can rewrite equation ( 4) as:
fract-
in Appendix 1, there are simplified ex-
.:
x(T)
I
dT +
2e. Equations of Motion
Within linear theory-and using the ship
symmetry, the heave and pitch motions are
n'ot coupled with the group of sway, roll,
yaw motions. We can express the heavepitch motions therefore as:
{
o
A
5
+s1
C5
Atsl
n
As5 } x
C
C35
5
x3
B53
B3
B3 B
+
F3
+
xv
n
)
where K ,Kv,K f the inverse Fourier trans-
Where Aij,Bij,Cij the added mass, damping,
hydrostatic coefficient matrices respectively; F. the exciting forces; 71 the wave
elevatioA;
form of -w2 tM+A(w)3, iiB(w) and Fo()
0
respectively. The random undisturbed wave
elevation is denoted by l
(t). Equation
x
{x3x(9}
-v
The subscriot ~ refers to heave and
+ C x(t) =' Kf(t-T)n(t)d¶
-a
(5)
because the effort required to evaluate
~the
kernels K ,K ,
is by far greater
than to find hevadded mass, damping and
exciting force. For this reason, equation
(5) is rewritten in a hybrid form as
follows:
e to
pitch (consistent with the hvdrodvnamic
literature). The frequency and velocity
dependence is not written explicitly,but
is understood, as described in the previous sections.
2f. Exciting Force Approximation
-EM+A(w)3 X(t) + B(w) x(t) + C x(t)
=
Fi)n(t)
(67
This is an integro-differential equation
{or differential equation with frequency
dependent coefficients), whose meaning is
in the sense of equation (5). It should
be noted that -W A(W),iwB(W) are caused
by the same radiation waves, so they afe
related by the Cramers-Kroning relations
of causal systems.
The heave exciting force amplitude presents several peaks and zeros as can be
seen in figure 2. Wi.hin the wave frequency range, only' the first peak is important, so that a relatively simple
finite dimensional approximation can be
used.
As it was mentioned before, the exciting
force depends on the wave frequency W and
varies with frequency We, while
it is parametrically dependent on the
speed and the wave angle.
3. WAVE SPECTRUM MODELING
The waves in a specific location are composed of waves generated by the local wind
and waves generated by a distant storm,
which are usually characterized as swell.
As a result, the wave spectrum contains
two peaks, one very narrow at low frequencies (swell), and one relatively wide
and at higher frequencies (local storm).
In order to model the DD-963 destroyer,
the M.I.T. five degrees of freedom seakeeping program C 23 was used to derive
hydrodynamic results. The following model
was derived to model the shape of the
heave force at V - 0 and 0- 0(no speed,
head seas)
a,1 1
Fs(s) =
2J l
+
2
a
waj
(10)
The Bretschneider spectrum was chosen for
the present application, which allows one
to specify both the intensity (significant wave height H) and the location of
the peak (modal frequency Wm). Two such
spectra can be used to model a double
peaked spectrum. The form of the spectrum
has as follows:
1.25
exp
1.25
( -)1 )
S(W) - 1.25a
H 2_
exp{1.25 C
Where J - 0.707 chosen for optimal response of a second order system, a 1 a constant determined from hydrodynamic data,
n
the wave elevation and w
the corner
frequency.
(15)
The spectrum was developed by Bretschneider for the North Atlantic, for unidirectional seas, with unlimited fetch, infinite depth and no swell. It was developed
to satisfy asymptotic theoretical predictions and to fit North Atlantic data.
It was found to fit reasonably well in any
sea location. The spectrum, for ship coordinates, has as follows
This approximation was extended to inelude the effects of speed and wave
angle by defining:
WaI
a
/
g
2w
+
2w
U dos
Lcos* + B
Lcosf + B
(li
where L is the ship length, B the beaxd'
For long waves, the heave force and the
pitching movement are 900 out of phase.
This means that the transfer function
between heave and pitch is a non-minimum
phase one, because the amplitude is constant, while the phase is 90°. We choose
to attribute the non-minimum phase to
pitch. Also, the pitch angle tends to
the wave slope for large wavelengths,so
the pitching moment can be written as
Fs = a2
I
2
s/
1 + s/wo
0B+2J
COS
S(f)
$
S(
.
where
U
W -
T3ss
Ms2 + C33g T3s + UsTS
UsT 3 3+C 3 sIs t
*.X3j
£3
+ Ts
fWe)
2 U cos#
n
17)
.,2fi
212
lW1+2J
- +I
1
(12)
A rational approximation was found'to
subject to (17)in the' following form
1.25
S (W ) Sa e
+ C1 5
- U T33
n
H2 B(l)
(16)
e
4w
1+(-
I
a
where B(a),w ' 0 (a), functions
of
(18)
a cao go,,,,
(19)
g
The corresponding causal system has transfer function:
2
Ha(s) -, S
+Css
(13)
Here we construct a simplified model
where
Tij - Aij T
- BiJ
iw
-
L
By using equation (9), we can rewrite the
equations of motion as
2 -
4
te
Added Ma-ss and Damping
T33s2+
f(.)
16
Where
a2 a constant to be determined, W
is the same (for simplicity) as in equa- a
tion (11), while wo models the non-minimum phase characteristics, and was chosen
to be equal to the wave spectrum modal
frequency.
2g.
) .
+
+ 2J
(o)
20)
where
- So
(14
with Aij,Bij to be evaluated from the'
hydrodynamic data.
1.25
H22 B(a
J
0.707
(2ab)
~O92
It should be noted that the Bretschneider
spectrum S (w) is related to the actual
defined as the Fouriers
spectrum St)Y,
transform of the autocorrelation, by the
relation
1
Sb (W)
S(o)
>O0
(22)
4.
B
Bs
B?
B.
B.
'
Oa
-(201 a
-
Ax + Bw
I
with A *
+ 2Jw
ALMAN
O
0
O
0
-2J,
000
h 'O
k
0
0
11
0
o0 o
0
00
0
01
02
03 0
O
O
0
1
Bs
B7
B.
0
L1
Subsequently, a Kalman filter was designed, using
the N.I.T.-LIDS software t[3 and for driving noise
1and
0
0[2
0
-21
1
W ;2
-02Jt
=CO
O
Cs -C
6
f = t 0
Cf
C
00
1
O
,O
o
I
O
0
! O
0 '2 O
=
~Dij
0
a>2
=
whrf
where
0
0
o
a
-
0o
2
(26ab)
03
01 0
* 2,
O; 0'I ucosJ(27ab)
o
oI
0.000
The filter
poles are within a radius of 1.3 rad./
sec. A typical 'simulation of heave and pitch motions and their predictions is given in figures
3,4 (assumin. exact knowledge of the sea parameters H and w_). By using the same filter
for
(other than the devarious combinetions of H,w
the performance
sign values) it was found tiat
depends primarily or the accurate
of the filter
estimation of the modal frequency w : Figures 5
1
and 6.
13T
0
Uf I=
02'~'75
corresponding to sea state 5 (H - 10 ft. ,wm = 0.72
rad./sec.
84
o
measurement noise intensities:
tU, WI
0
(25abc)
B
B = 55 ft.,T - 18 ft.
ing the N.I.T. sea-keeping program Ct2], and were
approximated as outlined above, for speed U - 21
°
ft./sec. and wave angle 0
0
_w2
a
83
82
APPLICATION
L - 529 ft.,
0
0
0
and with frequency content close to
*qw
amplitude,
12 rad./sec. (as opposed to the wave frequencies,
Swhich are less than 1 rad./sec.)
An example has been worked out for a DD-963 destroyer, whose length L, beam B and draft T are
a
a
a
cation were found to be as much as 0.5 ft. in
The hydrodynamic characteristics were obtained us-
0
I
0
o
0
0
0
0
00
00
0
0
Af
The noise is due primarily to the structural vibrations of the ship, which for the present appli-
-2J0W~
0-W
0
0
0
0
1
2
0
-°.M -2JWo
0O
0
0
1
L. S
FILTER
The accuracy of the measurements can be very good.
_-.... 1
s-.
1
(30abcd)
inured only.
-L-
2
a
measurements of angles. The linear motions
require the installation of accelerometers. For
simplicity, in the present application it is assumed that the heave and pitch motions are mea-
_ _
0
P0
(24abcd)
-
-
CC
m
As A-.- e0
And
5
0
5
The gyroscopes of the ship can provide very accu-
-
_ _ _.. _rate
& _
AI
Al
B.mCf
A.
a _C -ff Si |
-
and
+ 2JW)
a
(23ab)
P
+
2
-- W (4J -1)
2
equations are written as
Cit
Css Bs5
(29a1$
8
to the equations modeling the
If s refers
sea, f to the equations for the force and
m to the ship equations, then the overall
y-
ss Bs3
and
STATE SPACE MODEL
_
ij
The simulations indicate the good accuracy that
can be obtained by using the present formulation.
The most important parameter is the n-dal frewhose influence, although smooth,is quite
critical. The at sea estimation of the modal frequency can be done by using the zero up-crossing
(280b)
Aquency,
_
{ Afijl
093
period T. Typically
.
APPENDIX 1
0.
2ff ~ 7
07-
The following relations provide the hydrodynamic
coefficients and forces as functions of the speed
Us
A scheme for on-line estimation of um is currently
tested by extending the Kalman filter to estimate
th. Finally figure 7 illustrates the influence of
a second peak (swell) on the performance of the
filter. It is clearly seen that the second peak
must be modelled, if accurate predictions are desired.
SUmIARY
Ass
B3s
-
Ass
Bas
Ass
-
Ats -
B5s
-
Bts
Ass
-
Als + BUr
B5
-
Bf5 -
Ass
-
Ats + U2 At
aBts
-
A finite dimensional approximation of the heave
and pitch equations of motion of a ship, as obtained from hydrodynamic theory, has been outlined. The important features are:
(a) the frequency dependence of the coefficients of the equation of motion
(b) the non-minimum phase characteristics
between heave and pitch, due to the
spatial integration of the hydrodynamic forces
Bss ss2S
B31
+
Ats
UAfs
W2
+1U
tB
f
(c) the dependence of the hydrodynamic
quantities on the speed of the vessel
and the wave angle.
A Kalman filter can be used to estimate the motions, velocities, etc., whose performance pri-
The superscript o denotes quantities at zero
speed. The A ,Bi were found us
in
the M.I.T.
Seakeeping pgral' [2]Fs
-
marily depends on an accurate estimation of the
Fs
' - P
sea spectrum modal frequency. Very good estimation is obtained when all the features, mentioned above, are included.
- .I (ifs + hs)
n
dt
[It (fs + hs) +
ha] ad
il
where f is the sectional Froude-Xryloff force
and h J the sectional diffraction force.
ACKNOWLEDGEMENTS
The research presented in this-paper was supported
by a grant from NASA-Ames Research Center under
Grant NGL-22-009-124, and was conducted at the
M.I.T. Laboratory for Information and Decision
Systems.
REFERMES
ZI
(1) Salvesen, N.,Tuck ,Faltinsen,O.,wShip Motions and Ship Loads,' Trans. SNAME, 1970.
heave
(2) "5-Degrees of Freedom Seakeeping Program
Manual," Design Laboratory, Ocean Engineering
Dept., M.I.T., 1974, Cambridge, Mass.
(3) "Dynamic Control Systems Software --User's
Manual," Laboratory for Information and Decision Systems, M.I.T., 1980,Cambride,1ass,
sway
I
pitch
M(4)
McMuldroch,
C.., "VTOL Controls for Shipboard
Landing," Laboratory for Information and Decision Systems, Report LIDS-TH-928, 1979,
M.I.T.,Cambridge,Mass.
XI
--.
X
(5) Newman, J.N.,"Marine Hydrodynamics," M.I.T.
Press, 1978, Cambridge, Mass.
XX
Reference Systems
1094
FIGURE 2
f3
0.5
j
I m
·
pg:L
aOL
h
0
"
LAA
..........
,,
.1
FIGURE 5
1.0
Actual
5.0
H=10 ft
Noisy measurement
w,m,.32 rps
Estimated
FIGURE 3
W
H=10
I
J
FIGURE 6
-. 58 -
'
· -4.
*
8-.
3r
.*aR
3r
·
(sec)
TIME-s=0.72
FIGURE
*
m,
*I
S
S
S
3]
100i ft- h32
i
ft
58f
3
lo95
FIGURE 7
W
CO
Double peak spectrum
o