Random Poincar´ e maps and noise-induced mixed-mode-oscillation patterns
advertisement

Random Poincaré maps
and noise-induced mixed-mode-oscillation
patterns
Nils Berglund
MAPMO, Université d’Orléans
CNRS, UMR 7349 & Fédération Denis Poisson
www.univ-orleans.fr/mapmo/membres/berglund
nils.berglund@math.cnrs.fr
Collaborators: Barbara Gentz (Bielefeld)
Christian Kuehn (Vienna), Damien Landon (Dijon)
ANR project MANDy, Mathematical Analysis of Neuronal Dynamics
Workshop on Slow-Fast Dynamics
CRM, Barcelona, June 6, 2013
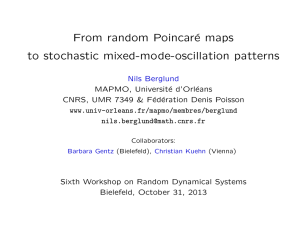
The deterministic Koper model
εẋ = f (x, y, z) = y − x3 + 3x
ẏ = g1(x, y, z) = kx − 2(y + λ) + z
ż = g2(x, y, z) = ρ(λ + y − z)
.0<ε1
. k, λ, ρ ∈ R : control parameters
1
The deterministic Koper model
εẋ = f (x, y, z) = y − x3 + 3x
ẏ = g1(x, y, z) = kx − 2(y + λ) + z
ż = g2(x, y, z) = ρ(λ + y − z)
.0<ε1
. k, λ, ρ ∈ R : control parameters
. Critical manifold: C0 = {f = 0} = {y = x3 − 3x}
. Folds: L = {f = 0, ∂xf = 0} = {y = x3 − 3x, x = ±1} = L+ ∪ L−
1-a
Critical manifold
Fold
ẋ 1
Stable critical
manifold
Unstable critical
manifold
y
Stable critical
manifold
x
ẋ −1
z
Fold
2
The deterministic Koper model
εẋ = f (x, y, z) = y − x3 + 3x
ẏ = g1(x, y, z) = kx − 2(y + λ) + z
ż = g2(x, y, z) = ρ(λ + y − z)
.0<ε1
. k, λ, ρ ∈ R : control parameters
. Critical manifold: C0 = {f = 0} = {y = x3 − 3x}
3
The deterministic Koper model
εẋ = f (x, y, z) = y − x3 + 3x
ẏ = g1(x, y, z) = kx − 2(y + λ) + z
ż = g2(x, y, z) = ρ(λ + y − z)
.0<ε1
. k, λ, ρ ∈ R : control parameters
. Critical manifold: C0 = {f = 0} = {y = x3 − 3x}
. Reduced flow on C0 (Fenichel theory): eliminate y
kx − 2(x3 − 3x + λ) + z
ẋ =
3(x2 − 1)
ż = ρ(λ + x3 − 3x − z)
n
o Generic fold points: ẋ diverges as x → ±1
n
o Folded node singularity: ẋ finite,
(desingularized) system has a node
3-a
Folded node singularity
Normal form [Benoı̂t, Lobry ’82, Szmolyan, Wechselberger ’01]:
ẋ = y − x2
ẏ = −(µ + 1)x − z
µ
ż =
2
(+ higher-order terms)
4
Folded node singularity
Normal form [Benoı̂t, Lobry ’82, Szmolyan, Wechselberger ’01]:
ẋ = y − x2
ẏ = −(µ + 1)x − z
µ
ż =
2
(+ higher-order terms)
y
C0r
C0a
L
x
z
4-a
Folded node singularity
Theorem [Benoı̂t, Lobry ’82, Szmolyan, Wechselberger ’01]:
For 2k + 1 < µ−1 < 2k + 3, the system admits k canard solutions
The j th canard makes (2j + 1)/2 oscillations
Mixed-mode oscillations
(MMOs)
Picture: Mathieu Desroches
5
Global dynamics
Fold
Stable critical
manifold
Canard
Stable critical
manifold
Folded node
Fold
. Canard orbits track unstable manifold (for some time)
Typical orbits may jump earlier
6
Global dynamics
Fold
Typical orbit
Stable critical
manifold
Canard
Stable critical
manifold
Folded node
Fold
. Canard orbits track unstable manifold (for some time)
. Typical orbits may jump earlier to stable manifold
6-a
Poincaré map
c.f. e.g. [Guckenheimer, Chaos, 2008]
Fold
Σ
Stable critical
manifold
Folded node
Fold
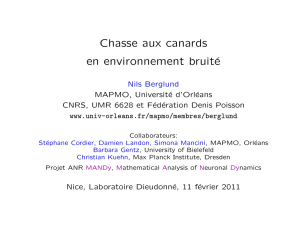
. Poincaré map Π : Σ → Σ, invertible, 2-dimensional
. Due to contraction along C0, close to 1d, non-invertible map
7
Poincaré map zn 7→ zn+1
-8.0
-8.1
-8.2
-8.3
-8.4
-8.5
-8.6
-8.7
-8.8
-8.7
-8.6
-8.5
-8.4
-8.3
-8.2
-8.1
-8.0
-7.9
-7.8
k = −10, λ = −7.35, ρ = 0.7, ε = 0.01
8
The stochastic Koper model
1
σ
dxt = f (xt, yt, zt) dt + √ F (xt, yt, zt) dWt
ε
ε
dyt = g1(xt, yt, zt) dt + σ 0G1(xt, yt, zt) dWt
dzt = g2(xt, yt, zt) dt + σ 0G2(xt, yt, zt) dWt
. Wt: k-dimensional Brownian motion
. σ, σ 0: small parameters (may depend on ε)
9
The stochastic Koper model
1
σ
dxt = f (xt, yt, zt) dt + √ F (xt, yt, zt) dWt
ε
ε
dyt = g1(xt, yt, zt) dt + σ 0G1(xt, yt, zt) dWt
dzt = g2(xt, yt, zt) dt + σ 0G2(xt, yt, zt) dWt
. Wt: k-dimensional Brownian motion
. σ, σ 0: small parameters (may depend on ε)
Random Poincaré map
In appropriate coordinates
dϕt = fˆ(ϕt, Xt) dt + σ̂ Fb (ϕt, Xt) dWt
b
dXt = ĝ(ϕt, Xt) dt + σ̂ G(ϕ
t , Xt ) dWt
ϕ∈R
X∈E⊂Σ
. all functions periodic in ϕ (say period 1)
. fˆ > c > 0 and σ̂ small ⇒ ϕt likely to increase
. process may be killed when X leaves E
9-a
Random Poincaré map
X
E
X1
X2
X0
ϕ
1
2
. X0, X1, . . . form (substochastic) Markov chain
10
Random Poincaré map
X
E
X1
X2
X0
ϕ
1
2
. X0, X1, . . . form (substochastic) Markov chain
. τ : first-exit time of Zt = (ϕt, Xt) from D = (−M, 1) × E
. µZ (A) = P Z {Zτ ∈ A}: harmonic measure (wrt generator L)
. [Ben Arous, Kusuoka, Stroock ’84]: under hypoellipticity cond,
µZ admits (smooth) density h(Z, Y ) wrt Lebesgue on ∂D
. For B ⊂ E Borel set
P X0 {X1 ∈ B} = K(X0, B) :=
Z
B
K(X0, dy)
where K(x, dy) = h((0, x), (1, y)) dy =: k(x, y) dy
10-a
Poincaré map zn 7→ zn+1
-8.5
-8.6
-8.7
-8.8
-8.9
-9.0
-9.1
-9.2
-9.3
-9.2
-9.1
-9.0
-8.9
-8.8
-8.7
-8.6
k = −10, λ = −7.6, ρ = 0.7, ε = 0.01, σ = σ 0 = 0
-8.5
-8.4
-8.3
11
Poincaré map zn 7→ zn+1
-8.5
-8.6
-8.7
-8.8
-8.9
-9.0
-9.1
-9.2
-9.3
-9.2
-9.1
-9.0
-8.9
-8.8
-8.7
-8.6
-8.5
k = −10, λ = −7.6, ρ = 0.7, ε = 0.01, σ = σ 0 = 2 · 10−7
-8.4
-8.3
11-a
Poincaré map zn 7→ zn+1
-8.5
-8.6
-8.7
-8.8
-8.9
-9.0
-9.1
-9.2
-9.3
-9.2
-9.1
-9.0
-8.9
-8.8
-8.7
-8.6
-8.5
k = −10, λ = −7.6, ρ = 0.7, ε = 0.01, σ = σ 0 = 2 · 10−6
-8.4
-8.3
11-b
Poincaré map zn 7→ zn+1
-8.5
-8.6
-8.7
-8.8
-8.9
-9.0
-9.1
-9.2
-9.3
-9.2
-9.1
-9.0
-8.9
-8.8
-8.7
-8.6
-8.5
k = −10, λ = −7.6, ρ = 0.7, ε = 0.01, σ = σ 0 = 2 · 10−5
-8.4
-8.3
11-c
Poincaré map zn 7→ zn+1
-8.5
-8.6
-8.7
-8.8
-8.9
-9.0
-9.1
-9.2
-9.3
-9.2
-9.1
-9.0
-8.9
-8.8
-8.7
-8.6
-8.5
k = −10, λ = −7.6, ρ = 0.7, ε = 0.01, σ = σ 0 = 2 · 10−4
-8.4
-8.3
11-d
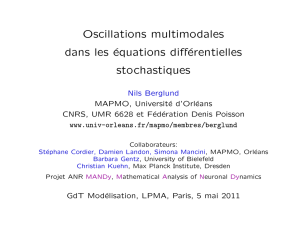
Poincaré map zn 7→ zn+1
-8.5
-8.6
-8.7
-8.8
-8.9
-9.0
-9.1
-9.2
-9.3
-9.2
-9.1
-9.0
-8.9
-8.8
-8.7
-8.6
-8.5
k = −10, λ = −7.6, ρ = 0.7, ε = 0.01, σ = σ 0 = 2 · 10−3
-8.4
-8.3
11-e
Poincaré map zn 7→ zn+1
-8.5
-8.6
-8.7
-8.8
-8.9
-9.0
-9.1
-9.2
-9.3
-9.2
-9.1
-9.0
-8.9
-8.8
-8.7
-8.6
-8.5
k = −10, λ = −7.6, ρ = 0.7, ε = 0.01, σ = σ 0 = 10−2
-8.4
-8.3
11-f
Random Poincaré map
Observations:
. Size of fluctuations depends on noise intensity
and canard number k: high order canards are more sensitive
. Saturation effect: constant distribution of zn+1 for k > kc(σ, σ 0)
∗ , number of SAOs increases
. Consequence: if kc < kdet
12
Random Poincaré map
Observations:
. Size of fluctuations depends on noise intensity
and canard number k: high order canards are more sensitive
. Saturation effect: constant distribution of zn+1 for k > kc(σ, σ 0)
∗ , number of SAOs increases
. Consequence: if kc < kdet
Questions:
. Prove saturation effect
. How does kc depend on σ, σ 0?
. How does size of fluctuations depend on σ, σ 0
and canard number k?
. In particular, size of fluctuations for k > kc?
12-a
Size of noise-induced fluctuations
det det
ζt = (xt, yt, zt) − (xdet
t , yt , z t )
1
σ
1
dζt = A(t)ζt dt + √ F (ζt, t) dWt +
b(ζt, t) dt
ε
ε
ε | {z }2
Z t
σ
ζt = √
ε 0
U (t, s)F (ζs, s) dWs +
Z
1 t
ε 0
=O(kζt k )
U (t, s)b(ζs, s) ds
where U (t, s) principal solution of εζ̇ = A(t)ζ.
13
Size of noise-induced fluctuations
det det
ζt = (xt, yt, zt) − (xdet
t , yt , z t )
1
σ
1
dζt = A(t)ζt dt + √ F (ζt, t) dWt +
b(ζt, t) dt
ε
ε
ε | {z }2
Z t
σ
ζt = √
ε 0
U (t, s)F (ζs, s) dWs +
Z
1 t
ε 0
=O(kζt k )
U (t, s)b(ζs, s) ds
where U (t, s) principal solution of εζ̇ = A(t)ζ.
Lemma (Bernstein-type estimate):
)
)
(
2
Z s
h
P sup G(ζu, u) dWu > h 6 2n exp −
2V (t)
06s6t 0
Z s
where
G(ζu, u)G(ζu, u)T du 6 V (s) and n = 3
0
(
13-a
Size of noise-induced fluctuations
det det
ζt = (xt, yt, zt) − (xdet
t , yt , z t )
1
σ
1
dζt = A(t)ζt dt + √ F (ζt, t) dWt +
b(ζt, t) dt
ε
ε
ε | {z }2
Z t
σ
ζt = √
ε 0
U (t, s)F (ζs, s) dWs +
Z
1 t
ε 0
=O(kζt k )
U (t, s)b(ζs, s) ds
where U (t, s) principal solution of εζ̇ = A(t)ζ.
Lemma (Bernstein-type estimate):
)
)
(
2
Z s
h
P sup G(ζu, u) dWu > h 6 2n exp −
2V (t)
06s6t 0
Z s
where
G(ζu, u)G(ζu, u)T du 6 V (s) and n = 3
0
(
Remark: more precise results using ODE for covariance matrix of
t
σ
0
ζt = √
U (t, s)F (0, s) dWs
ε 0
Z
13-b
Regular fold
Σ5
C0a+
Σ′4
Σ4
Σ6
C0r
Σ1
Σ3
Folded node
Σ2
C0a−
Transition
Σ2 → Σ3
Σ3 → Σ4
Σ4 →
Σ04
Σ04 → Σ5
Σ5 → Σ6
Σ6 → Σ1
Σ1 → Σ01
Σ01 → Σ001
√
if z = O( µ)
Σ001 → Σ2
∆x
σ
σ
σ
ε1/6
σ0
+ 1/3
ε
Σ′′1
Σ′1
∆y
(σ + σ 0 )ε1/4
(σ + σ 0 )(ε/µ)1/4
∆z
√
σ ε + σ0
√
σ ε + σ0
p
σ ε|log ε| + σ 0
√
σ ε + σ 0 ε1/6
√
σ ε + σ0
√
σ ε + σ0
σ0
σ 0 (ε/µ)1/4
(σ + σ 0 )ε1/4
(σ + σ 0 )ε1/4
√
σ ε + σ 0 ε1/6
σ
σ
14
Example: Analysis near the regular fold
(δ0 , y ∗ , z ∗ )
Σ∗n
(x0 , y0 , z0 )
Σ′4
c1 ǫ2/3
Σ∗n+1
Σ5
ǫ1/3 2n
C0a−
y
C0r
x
z
Proposition: For h1 = O(ε2/3),
(
P k(yτΣ , zτΣ ) − (y ∗, z ∗)k > h1
5
5
)
κh2
1
6 C|log ε| exp −
σ 2ε + (σ 0)2ε1/3
(
√
0
Useful if σ, σ ε
)
(
κε
+ exp − 2
σ + (σ 0)2ε
)!
15
Local analysis near the folded node [B, Gentz, Kuehn, JDE 2012]
Thm 1: (Canard spacing)
For z = 0, the kth canard lies at dist.
√ −c(2k+1)2µ
εe
from primary canard
Thm 2: Size of fluctuations
√
(σ + σ 0)(ε/µ)1/4 up to z = εµ
2
√
(σ + σ 0)(ε/µ)1/4 ez /(εµ) for z > εµ
Thm 3: (Early escape)
Prob. to stay near primary canard
2
0
6 C|log(σ + σ 0)|γ e−κz /(εµ|log(σ+σ )|)
√
kµ ε
√
µ ε
x (+z)
√
ε
√
ε e−cµ
√
z
ε e−c(2k+1)
16
2
µ
Local analysis near the folded node [B, Gentz, Kuehn, JDE 2012]
Thm 1: (Canard spacing)
For z = 0, the kth canard lies at dist.
√ −c(2k+1)2µ
εe
from primary canard
Thm 2: Size of fluctuations
√
(σ + σ 0)(ε/µ)1/4 up to z = εµ
2
√
(σ + σ 0)(ε/µ)1/4 ez /(εµ) for z > εµ
Thm 3: (Early escape)
Prob. to stay near primary canard
2
0
6 C|log(σ + σ 0)|γ e−κz /(εµ|log(σ+σ )|)
√
kµ ε
√
µ ε
x (+z)
√
ε
√
z
µε
(σ + σ 0 )(ε/µ)1/4
16-a
Local analysis near the folded node [B, Gentz, Kuehn, JDE 2012]
Thm 1: (Canard spacing)
For z = 0, the kth canard lies at dist.
√ −c(2k+1)2µ
εe
from primary canard
Thm 2: Size of fluctuations
√
(σ + σ 0)(ε/µ)1/4 up to z = εµ
2
√
(σ + σ 0)(ε/µ)1/4 ez /(εµ) for z > εµ
Thm 3: (Early escape)
Prob. to stay near det. solution
2
0
6 C|log(σ + σ 0)|γ e−κz /(εµ|log(σ+σ )|)
√
kµ ε
√
µ ε
x (+z)
√
ε
√
z
µε
(σ + σ 0 )(ε/µ)1/4
16-b
Local analysis near the folded node [B, Gentz, Kuehn, JDE 2012]
Thm 1: (Canard spacing)
For z = 0, the kth canard lies at dist.
√ −c(2k+1)2µ
εe
from primary canard
√
kµ ε
√
µ ε
Thm 2: Size of fluctuations
√
(σ + σ 0)(ε/µ)1/4 up to z = εµ
2
√
(σ + σ 0)(ε/µ)1/4 ez /(εµ) for z > εµ
x (+z)
√
ε
√
Thm 3: (Early escape)
Prob. to stay near det. solution
2
0
6 C|log(σ + σ 0)|γ e−κz /(εµ|log(σ+σ )|)
z
µε
(σ + σ 0 )(ε/µ)1/4
Consequence: Dichotomy
. Canards with k 6
q
. Canards with k >
q
1/µ: ∆z σ(ε/µ)1/4 + σ 0
|log(σ + σ 0)|/µ: ∆z 6 O
(assuming ε 6 µ)
0
εµ|log(σ + σ )|
q
16-c
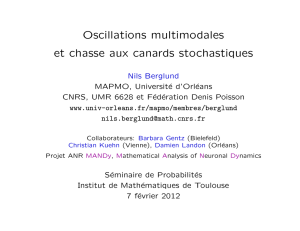
Summary
.
q
1/µ < kc <
. For k 6
q
q
|log(σ + σ 0)|/µ
1/µ, dispersion
∆z σ(ε/µ)1/4 + σ 0
q
. For k > |log(σ + σ 0)|/µ
q
0
∆z 6 O εµ|log(σ + σ )|
. If the deterministic system has
MMO with k∗ SAOs and k∗ < kc
then noise increases number of
SAOs
-8.5
-8.6
-8.7
-8.8
-8.9
-9.0
-9.1
-9.2
-9.3
-9.2
-9.1
-9.0
-8.9
-8.8
-8.7
-8.6
-8.5
17
-8.4
-8.3
Summary
.
q
1/µ < kc <
. For k 6
q
q
|log(σ + σ 0)|/µ
1/µ, dispersion
∆z σ(ε/µ)1/4 + σ 0
q
. For k > |log(σ + σ 0)|/µ
q
0
∆z 6 O εµ|log(σ + σ )|
. If the deterministic system has
MMO with k∗ SAOs and k∗ < kc
then noise increases number of
SAOs
-8.5
-8.6
-8.7
-8.8
-8.9
-9.0
-9.1
-9.2
-9.3
-9.2
-9.1
-9.0
-8.9
-8.8
-8.7
-8.6
-8.5
Further ways to analyse random Poincaré map
. Theory of singularly perturbed Markov chains
. For coexisting stable periodic orbits: Metastable transitions
17-a
-8.4
-8.3
Thanks for your attention – Further reading
N.B. and Barbara Gentz, Noise-induced phenomena in slow-fast dynamical systems, A
sample-paths approach, Springer, Probability and
its Applications (2006)
N.B. and Barbara Gentz, Stochastic dynamic bifurcations and excitability, in C. Laing and G. Lord,
(Eds.), Stochastic methods in Neuroscience, p.
65-93, Oxford University Press (2009)
N.B., Stochastic dynamical systems in neuroscience, Oberwolfach Reports
8:2290–2293 (2011)
N.B., Barbara Gentz and Christian Kuehn, Hunting French Ducks in a Noisy
Environment, J. Differential Equations 252:4786–4841 (2012). arXiv:1011.3193
N.B. and Damien Landon, Mixed-mode oscillations and interspike interval
statistics in the stochastic FitzHugh–Nagumo model, Nonlinearity 25:2303–
2335 (2012). arXiv:1105.1278
N.B. and Barbara Gentz, On the noise-induced passage through an unstable
periodic orbit II: General case, preprint arXiv:1208.2557
www.univ-orleans.fr/mapmo/membres/berglund
18