Document 10965321
advertisement

CONFRONTING MODEL MISSPECIFICATION IN
MACROECONOMICS
DANIEL F. WAGGONER AND TAO ZHA
We onfront model misspeiation in maroeonomis by proposing an
analyti framework for merging multiple models. This framework allows us to 1)
address unertainty about models and parameters simultaneously and 2) trae out
the historial periods in whih one model dominates other models. We apply the
framework to a rihly parameterized DSGE model and a orresponding BVAR model.
The merged model, tting the data better than both individual models, substantially
alters eonomi inferenes about the DSGE parameters and about the implied impulse
responses.
Abstrat.
I. Introdution
A stohasti dynami equilibrium, indexed by a
funtion.
parameterized
model, is a likelihood
Given the likelihood and the prior density of model parameters, one an
simulate the posterior distribution and ompute the marginal data density (MDD).
The MDD is then used to measure how well the model is t to the data.
Consider the situation in whih there are multiple models on the table. The onventional proedure for model seletion is to ompare MDDs amongst individual models.
1
Sine it is not unommon that the MDD implied by one of the models is overwhelmingly higher than the MDDs implied by others, this proedure often ends up with
the seletion of one model at the exlusion of others. One primary example is that a
linearized dynami stohasti general equilibrium (DSGE) model suh as Smets and
Wouters (2007) an easily trump a standard Bayesian vetor autoregression (BVAR)
: November 29, 2010.
Merged model, misspeiation, state-dependent weights, model unertainty, parameter unertainty, impulse responses, poliy analysis.
JEL lassiation: C52, E2, E4.
We thank Frank Diebold, John Geweke, Frank Shorfheide, and Chris Sims for helpful disussions.
The views expressed herein are those of the authors and do not neessarily reet the views of the
Federal Reserve Bank of Atlanta or the Federal Reserve System.
1We impliitly assume that the prior weight is the same for all models. If the prior weight varies
aross models, we simply adjust the Bayes fators and alulate the posterior odds ratios.
Date
Key words and phrases.
1
CONFRONTING MODEL MISSPECIFICATION
2
2
model. The impliation is that the BVAR an be simply replaed by the DSGE model
for poliy analysis.
Despite suh overwhelming evidene presented by the posterior odds ratios in favor of
one model, eonomists nonetheless ontinue to use both the DSGE and BVAR models
in maroeonomi analysis.
The tension between what the onventional proedure
onludes and what atually transpires is a mere manifestation of inreasing onerns
about model misspeiation by hoosing a partiular model (a partiular likelihood)
and ategorially rejeting other models. Poliymakers, as well as aademi researhers,
reognize that models are only
approximations
(Hansen and Sargent, 2001; Brok,
Durlauf, and West, 2003; Sims, 2003). Indeed, they seldom rely on one single model
even though this model ts better than other models aording to the posterior odds
riterion, beause they know that
We onfront model misspeiation by proposing a Bayesian approah to merging
multiple models.
The merged model assigns
state-dependent
weights to preditive
densities (onditional likelihoods) implied by dierent models so that the relative importane of eah model hanges aross time. This new methodology, built on Geweke
and Amisano (forthoming), is motived by pratial poliy analysis dealing with situations where there are multiple ompeting models and eah model explains (predits)
an observed outome better than other models but only for ertain episodes. An informal way for poliy analysis is to employ a dierent model at a dierent time. Unlike
the onventional model-averaging method, our Markov-swithing approah not only
assigns a weight of relative importane to eah model but, more importantly, allows researhers to trae out the periods in whih the data give the most weight to a partiular
model.
We apply our analyti framework to two widely used models: a rihly parameterized DSGE model and a orresponding BVAR model. The MDD for the DSGE model
is muh higher than the BVAR model.
The onventional Bayesian model-averaging
method would imply that the BVAR model should reeive nearly zero weight, a pathology disussed in Sims (2003). Our Bayesian approah overomes this pathology. The
merged model does not degenerate into the DSGE model or the BVAR model. To the
ontrary, our estimation indiates that the BVAR model dominates the DSGE model
2For
sensitivity analysis, we also onsider a ase in Setion VI.4, where the BVAR model trumps
the DSGE model.
CONFRONTING MODEL MISSPECIFICATION
3
throughout two thirds of the history. The merged model, assigning nontrivial statedependent weights to both models, ts the data onsiderably better than either the
DSGE model or the BVAR model.
The rest of the literature has often treated the BVAR model as a benhmark to gauge
how misspeied the DSGE model is.
Our estimated results hallenge this thinking
beause both the BVAR model and the DSGE model may be potentially misspeied.
Rather than divoring the data analysis from a partiular model whose t may not be
as good, the estimation of our merged model indiates that both DSGE and BVAR
models are operative but
at dierent times.
Our methodology makes it eonometrially implementable to establish the twoway ommuniation between the theoretial DSGE model and the atheoretial BVAR
model. We nd that the posterior distributions of a number of key DSGE parameters
hange substantially when we inorporate the BVAR model in the merged model spae.
The error bands around impulse responses are predominately wider as the data imply
more unertainty about the DSGE model when the merged model is estimated. The
relative importane of a strutural shok in the DSGE model in explaining maroeonomi utuations is inuened heavily by the presene of the BVAR model. Thus,
our approah integrates the two types of unertainty, model unertainty and parameter
unertainty, in one oherent framework.
II. Literature review
Our key assumption in this paper is that the true data generating proess may not
be among the models whose foreasts are ombined. This insight appears in Diebold
(1991), who argues that the standard Bayesian posterior-odds foreast averaging should
be re-thought. Geweke and Amisano (forthoming) propose a method of pooling the
models by ombining the preditive densities, whih are onsistent with out-of-sample
foreasts. Although Geweke and Amisano (forthoming) do not take a stand on the true
data generating proess, the log preditive sore of pooled models tends to dominate
the sore of eah individual model in the pool as the sample beomes large.
This
result is onsistent with the extension of Geweke and Amisano (forthoming)'s idea by
Fisher and Waggoner (2010), who assume expliitly that the data generating proess
is a mixture of multiple models.
Our eonometri methodology builds on these previous works. We show that statedependent weights not only inlude Fisher and Waggoner (2010) as a speial ase
but also gives a dierent interpretation about the relative importane of eah model by
CONFRONTING MODEL MISSPECIFICATION
3
estimating the probability that eah model is hosen at time t.
4
Using the log preditive
sore, Geweke and Amisano (forthoming) estimate the weights of models while taking
the parameters in eah model as given. Unlike Geweke and Amisano (forthoming),
we estimate the weights and the parameters of all the models jointly. One of our key
ndings is that the estimated parameters for the merged model are dierent from those
when the models are estimated separately.
Del Negro and Shorfheide (2004) address potential BVAR misspeiation by introduing the prior implied by a DSGE model into a BVAR model. We extend their
idea by allowing for the two-way ommuniation between the two models. Both the
DSGE prior and the BVAR prior play an integral part of model estimation. Moreover,
the two likelihoods interat with eah other in forming the merged likelihood.
Cogley and Sargent (2005) study an eonomy in whih agents, faing model unertainty, ompute the posterior odds ratios over three models and make deisions by
Bayesian model averaging. As pointed out by Sims (2003) and Geweke and Amisano
(forthoming), one an enounter the pathology that the odds ratios lead to seleting only one model and rejeting all other models. By estimating the state-dependent
weights and the parameters of the models jointly, we provide an empirially operational
way to implement Sims (2003)'s idea of lling in the gap between DSGE and BVAR
4
models by overoming the diulties inherent in Bayesian model averaging.
III. Markov-swithing framework
To integrate model unertainty and parameter unertainty in one merged framework,
we propose a Bayesian approah to modeling state-dependent weights for a linear ombination of preditive densities produed by dierent models. Our key assumption is
that the observed data at time t,
p yt |
yto,
o
Yt−1
, Θ, Q, w
is generated from the following preditive density
=
n
X
i=1
∗
o
wi,t
p yt | Yt−1
, Θi , Mi ,
where
∗
wi,t
=
h
X
st =1
o
, Θ, Q, w ,
wi,st p st | Yt−1
3West and Harrison (1997) present a similar idea of allowing the weights of eah model time-varying
in dynami foreasting exerises.
4Hansen and Sargent (2001) and Sims (2003) advoate a large model spae. In our framework, this
advie orresponds to inreasing the number of individual models in the merged model spae.
CONFRONTING MODEL MISSPECIFICATION
o
p yt | Yt−1
, Θi , Mi
model
i
is the preditive density of
and the observed data up to time
i,
parameters for model
state,
st ,
and
ours at time
t
wi,st
and
Pn
i=1
follows a Markov proess with the transition matrix
qk,j
5
for k, j = 1, . . . , h.
onditional on the parameters of
o
1, Yt−1
o
= y1o, · · · , yt−1
, Θi
is the probability weight given to model
wi,st ≥ 0
with
t−
yt
5
wi,st = 1.
i
is a set of
when the
The state variable,
st ,
Q, where Prob [st = k | st−1 = j] =
Note that
Θ = {Θ1 , · · · , Θn }, w = {wi,k }
We use the notation Mi in
for
o
p yt | Yt−1
, Θi , Mi
data density of model i, denoted by
o
omplete model, denoted by p (YT
p (YTo | Mi ),
k = 1, . . . , h, i = 1, . . . , n.
beause we will ompare the marginal
with the marginal data density of the
| M).
The log likelihood funtion is thus given by
log p (YTo |Θ, Q, w)
=
T
X
t=1
T
X
log
t=1
where the parameters
Whether model
random variable
i
o
log p yt | Yt−1
, Θ, Q, w =
" n
h
X X
st =1
i=1
Θ, Q,
o
, Θ, Q, w
wi,st p st | Yt−1
and
w
are to be
!
o
p yto | Yt−1
, Θi , Mi
estimated jointly.
will be preferred by the data depends on the state
ξt ∈ {1, . . . , n}
to index the model hosen at time
t.
st .
#
,
We use the
This random
variable obeys the onditional probability:
where
p (ξt | st ) = wst ,ξt ,
Pn
Pn
ξt =1 p (ξt | st ) = 1 beause
ξt =1 wst ,ξt = 1.
proess itself, the joint proess
Proposition 1.
(st , ξt )
The joint proess
Although
ξt
is not a Markov-
is.
(st , ξt )
is a Markov proess with the expanded transi-
tion matrix
Prob [(st , ξt )
for
j, k = 1, . . . , h
Proof.
and
= (k, i) | (st−1 , ξt−1 ) = (j, g)] = qk,j wi,k ,
g, i = 1, . . . , n.
The proof follows from the basi onditional probability theory by noting that
p (st , ξt | st−1 , ξt−1 ) = p (st | st−1 , ξt−1 ) p (ξt | st , st−1 , ξt−1 ) = p (st | st−1 ) p (ξt | st ) .
5As shown in Sims, Waggoner, and Zha (2008), qkj an also depend on the observed data Yt−1
o
.
CONFRONTING MODEL MISSPECIFICATION
6
Proposition 1 formulates the way we implement our estimation strategy. Sine the
restritions imposed on the expanded transition matrix in Proposition 1 satisfy the
onditions speied in Sims, Waggoner, and Zha (2008), one an apply their estimation
method diretly to our framework of merging individual models.
IV. Identifiation and reinterpretation
In this setion we disuss the identiation of state-dependent weights and reinterpret
what onstant weights used in the literature mean from the ex ante point of view.
IV.1.
General identiation issue.
identied separately.
In general,
wi,k
and
o
p st | Yt−1
, Θ, Q, w
an be
h = 2
To see this point, onsider the following ase with
and
n = 2:
For any given
∗
#
w1,t
w1,1 w1,2 "
o
∗
p st = 1 | Yt−1 , Θ, Q, w
= w2,t .
w2,1 w2,2
o
p st = 2 | Yt−1
, Θ, Q, w
∗
w3,t
w3,1 w3,2
∗
o
wi,t
and p st | Yt−1 , Θ, Q, w , there are three equations
wi,k
strited weights
and it appears that we always have more than one solution. This
onlusion is not true, however. Sine both
time but
wi,k
∗
wi,t
and
t
or
o
p st | Yt−1
, Θ, Q, w
an in general identify
IV.2.
∗
wi,t
and
o
p st | Yt−1
, Θ, Q, w
hange over
are onstant, we do not have more than one solution and may indeed
have no solution at all for some
hange
but four unre-
wi,st .
st .
This results means that we annot arbitrarily
while keeping
Strengthening identiation.
wi,k
the same aross time. Thus, we
As the number of models or the number of
states inreases, the number of free parameters in the expanded transition matrix
inreases at an even faster speed, making it neessary to impose further restritions to
avoid overtting and at the same time strengthen the identiation of
this goal, we let
the state
st
h = n, wi,st = 1
when
st = i,
and
wj,st = 0
when
wi,st .
st 6= j
To ahieve
. Thus, when
is realized, only one of the models is operative. Sine one an never be
sure of whih state is realized, one an never be sure of whih model is operative, even
after observing all the data. One an, however, ompute the smoothed probability of
the state,
p st | YTo , Θ̂, Q̂, ŵ ,
where the supersript ˆ denotes the posterior estimate.
The probability enables one to gauge how likely a partiular model is seleted. In our
appliation, we will report this posterior probability throughout the history.
CONFRONTING MODEL MISSPECIFICATION
IV.3.
Reinterpretation.
rent state
7
Although we know whih model is operative given the ur-
st , there is unertainty about models ex ante (i.e., at time t−1) and foreasts
of eonomi variables will in general depend on multiple models through the transition
matrix. Thus, for the purpose of poliy foreasts, it is
ex ante unertainty that matters.
Moreover, this unertainty presents a dierent interpretation of onstant weights used
in the literature, as shown in the following proposition.
Proposition 2.
Proof.
If
Beause
qi,j = qi,k = qi
qi,j = qi,k ,
for
i, j, k = 1, . . . , n,
it must be true that
∗
wi,t
= qi .
the probability of swithing to the urrent state
same no matter what the state at time
t−1
st
is the
is. This result means that all the past
data are irrelevant in inferring about the probability of the urrent state. It follows
that
From the denition of
∗
wi,t
=
h
X
st =1
∗
wi,t
,
o
p st = i | Yt−1
, Θ, Q, w = qi .
we have
o
o
wi,st p st | Yt−1
, Θ, Q, w = wi,i p st = i | Yt−1
, Θ, Q, w = qi .
It is, perhaps, not surprising that onstant weights are a speial ase of our Markovswithing framework.
What is new from Proposition 2 is that a onstant weight is
about the relative importane of the model only at time
will hange one we have the data beyond time
t − 1.
t−1
and the model's weight
Given all the data, moreover,
our Markov-swithing framework enables us to reinterpret this history by traing out
the periods in whih a partiular model is more relevant than others, even when all the
weights are onstant.
V. Appliation
We apply the framework presented in Setion III to two widely used models:
a
medium-sale DSGE model and a BVAR model. The DSGE model is based on Liu,
Waggoner, and Zha (2010). The large part of the model is the same as Altig, Christiano, Eihenbaum, and Linde (2004) and Smets and Wouters (2007) with the notable
exeptions that (1) some real rigidity is introdued, as in Chari, Kehoe, and MGrattan (2000), by assuming the existene of rm-spei fators (suh as land) suh that
the sum of ost shares of apital and labor inputs is less or equal to one and (2) a
CONFRONTING MODEL MISSPECIFICATION
8
shok to the depreiation in physial apital is introdued as a stand-in for eonomi
obsolesene of apital (see Appendix B for some details of the model).
The DSGE model is t to eight quarterly variables: quarterly growth of real per
Data ), quarterly growth of real per apita onsumption (∆ log C Data ),
t
Data
quarterly growth of real per apita investment in apital goods unit (∆ log It
), quarData
), the quarterly GDP-deator ination rate
terly growth of the real wage (∆ log wt
Data ), quarterly growth of per apita hours (∆ log LData ), the federal funds rate
(πt
t
Data ), and quarterly growth of investment-spei tehnology (∆ log QData ) as
(FFR
apita GDP (∆ log Yt
t
t
measured by the inverse of the relative prie of investment. A detailed desription of
the data is given in Appendix A. The data in the initial four quarters from 1960:I to
1960:IV are used to obtain the initial ondition at 1961:I for the Kalman lter. Thus,
the eetive sample used for model evaluation is from 1961:I to 2010:II.
The BVAR model has the same eight variables as the DSGE model; and it has four
lags from 1960:I to 1960:IV so that the eetive sample is also from 1961:I to 2010:II.
To make our BVAR model omparable with the DSGE literature, we follow Smets and
Wouters (2007) and use the standard Minnesota-like prior with the hyperparameter
values
µ1 = µ2 = µ3 = 1.5,
the random walk prior,
the lagged oeients,
onstant term, and
µ2
µ3
and
µ4 = 1.3
where
µ1
ontrols overall tightness of
ontrols relative tightness of the random walk prior on
ontrols relative tightness of the random walk prior on the
µ4 ontrols tightness of the prior that dampens the errati sampling
eets on lag oeients (lag deay).
6
The prior for the DSGE model is reported in Tables 1 and 2. Instead of speifying
the mean and the standard deviation, we use the
90%
probability interval to bak
out the hyperparameter values of the prior distribution. The intervals are generally
set wide enough to allow for the possibility that the posterior mode is lose to or on
the boundary of the parameter spae. It also allows for multiple loal posterior peaks
(Del Negro and Shorfheide, 2008).
Our approah is neessary to deal with skewed
distributions and allows for reasonable hyperparameter values in ertain distributions,
suh as the Inverse-Gamma, where the rst two moments may not exist.
For many parameters with the Beta prior distribution, suh as the habit parameter
and the persistene parameters in shok proesses, we insist on a positive probability
density at the value
0
to allow for the possibility of no habit and no persistene at all;
we also insist on zero probability density at the value
1 to maintain the assumption that
6In Setion VI.4, we study another standard prior proposed by Sims and Zha (1998).
CONFRONTING MODEL MISSPECIFICATION
9
the eonomy is on the balaned growth path. Consequently, the two hyperparameter
1.0
values for the Beta prior are set at
and
2.0.
The prior for the labor share and apital share is the Beta distribution with the
α1 + α2 ≤ 1
restrition
suh that the prodution tehnology requires rm-spei
fators (Chari, Kehoe, and MGrattan, 2000). The bounds for the
90%
probability interval are
restrition
α1 + α2 ≤ 1 ,
0.3
and
0.4
and those for
however, the joint
90%
α2
are
0.5
α1
and
values in the
0.7.
With the
probability region would be somewhat
dierent.
The prior for the inverse Frish elastiity
hoose the
2
η
follows the Gamma distribution.
We
hyper-parameters of the Gamma distribution suh that the lower bound
(0.2) and the upper bound (10.0) of
prior range for
η
η
orrespond to the
90% probability interval.
implies that the Frish elastiity lies between
0.1
and
This
5.
The lower and upper bounds of prior distributions are speied in Table 1 for the
parameters
λq , λ∗ , β , σu , S ′′ , δ , ξp , γp , ξw , γw , φπ , φy , and π ∗ .
Using these wide bounds,
we bak out the two hyperparameter values for the orresponding prior distributions.
The Gamma prior for the average net prie markup
prior for the average net wage markup
this prior to be
1.0,
µw − 1.
µp −1 is the same as the Gamma
By setting the rst hyperparameter of
we allow for a positive probability that the net markups may be
zero. This generality (a less stringent prior) turns out to be ritial as our posterior
estimates of
µp − 1
the Gamma prior at
(from
0.0094
to
µw − 1
and
are nearly zero. We set the seond hyperparameter of
5.5 suh that the implied 90% probability bounds are wide enough
0.5446).
The prior for the parameter
ρgz ,
apturing the impat of tehnologial improvement
on government spending, is the Gamma distribution with the
given by
90%
probability bounds
[0.2, 3.0].
The standard deviation of eah of the
tribution with the
90%
8
shoks has the Inverse Gamma prior dis-
probability bounds given by
[0.0005, 1.0].
These wide bounds
are neessary to take aount of the possibility that some shoks may have very small
varianes while others may have very large varianes. With these bounds, there exist
no moments for the Inverse Gamma prior. One an still, however, bak out the two
hyperparameter values as reported in Table 2.
The transition from one model to the other has the following matrix form:
Q=
"
#
q11 q12
q21 q22
,
CONFRONTING MODEL MISSPECIFICATION
where
P2
i=1 qij
= 1 for j = 1, 2.
10
Following Sims, Waggoner, and Zha (2008), we express
a prior belief that the average duration for a model to remain dominant is between six
and seven quarters. The belief implies that the hyperparameter in the exponent of
in the Dirihlet prior density is
5.6667 and the
other hyperparameter is
1.0.
qii
This prior
setting allows for the possibility that model
i dominates other models all the time (i.e.,
qii = 1).
90%
Table 2 reports the orresponding
probability interval.
VI. Measuring misspeifiation
In this setion we quantify the degree of DSGE model misspeiation by 1) omputing the MDDs for the DSGE and BVAR models against the MDD for the merged
model and 2) traing out the posterior probabilities of eah model aross time.
We
then disuss a variety of eonomi impliations of this misspeiation. Although both
BVAR and DSGE models are misspeied, we fous on the DSGE model by omparing
the estimated results of the merged model to those of the DSGE model alone.
VI.1.
Model t.
We ompute the MDDs for the merged model, the DSGE model
alone, and the BVAR model alone.
Table 5 reports log values of these MDDs.
For
the BVAR model, there is an analytial solution for alulating the MDD so that the
reported log value of MDD has negligible numerial errors. For the DSGE model and
the merged model, however, numerial errors are nontrivial. We use two dierent Monte
Carlo methods to ompute MDDs. One method is the trunated modied harmoni
mean (MHM) method proposed by Sims, Waggoner, and Zha (2008); the other method,
alled the Müeller method, is developed by Ulrih Müeller at Prineton University.
7
The two methods an give dierent results due to numerial errors and we report the
8
range of estimates of the MDDs in Table 5.
The log value of the MDD for the DSGE model is about
50
above log MDD for
the BVAR. The onventional Bayesian averaging proedure would give the BVAR essentially zero weight. The merged model, unlike the onventional Bayesian averaging
proedure, not just ombines the two distint models but also expands the parameter
spae by estimating the parameters of both models and the weights jointly.
Conse-
quently, both models are operative as disussed in Setion VI.2. The resulting MDD
7See Liu, Waggoner, and Zha (2010) for a detailed desription of the Müeller method.
8To ensure the auray, 20 million posterior draws and 2 million proposal draws are simulated.
For the merged model, the simulation takes about 30 days or two full days by availing itself to
omputational parallelism on a luster of 15 modern omputers.
CONFRONTING MODEL MISSPECIFICATION
for the merged model is about
100
11
in log value above the MDD for the DSGE model.
This magnitude gives a sense of how misspeied both models are.
VI.2.
Posterior estimates.
The prior speied for the DSGE model is looser and
more agnosti than most priors in the DSGE literature.
The agnosti prior omes
also with the prie: sine the likelihood funtion for the merged model is ompliated
and full of multiple loal peaks, the resulting posterior density funtion is ompliated
as well. The non-Gaussian nature of the posterior density implies that the posterior
mean may have a very low (joint) probability and thus annot represent the most likely
outome for the model. The posterior mode is, by denition, the most probable point
in the parameter spae, regardless of how non-Gaussian and ompliated the shape of
the posterior probability density is. Moreover, using a point in the neighborhood of
the posterior mode as a starting point for the MCMC algorithm avoids the situation
where a long sequene of posterior draws gets stuk in the low probability region due
to a poor starting point.
To nd the posterior mode, we ombine the hill-limbing quasi-Newton (BroydenFlether-Goldfarb-Shanno BFGS) algorithm with oasional downhill movements
generated by MCMC draws.
Tables 3 and 4 report the posterior-mode estimates of
the DSGE model parameters along with the
90%
marginal probability intervals.
In
these tables we ontrast the estimated results for the merged model to those for the
DSGE model alone. There are a few instanes in whih the estimated results from the
merged model are similar to those from the DSGE model when estimated alone. The
probability interval of
β
is atually smaller in the merged model than in the DSGE
model alone. The estimate of the average prie markup is lose to zero, similar to the
estimate in the DSGE model when treated alone. This result implies that the demand
urve for dierentiated goods is very at. Thus, a small inrease in the relative prie
an lead to large delines in relative output demand.
Even if rms an re-optimize
their priing deisions frequently, they hoose not to adjust their relative pries too
muh. In other words, the small average markup and thus the large demand elastiity
beome a soure of strategi omplementarity in rms' priing deisions.
The general pattern, as indiated by the
90% probability intervals, is that the merged
model exposes more unertainty about the estimated DSGE parameters than what is
implied when the DSGE model is treated as the truth and estimated alone. In many
ases, suh as the inverse Frish elastiity of labor supply (η ) and the urvature of
the apital utilization ost funtion evaluated at the steady state (σu ), the probability
distributions have hanged so muh that the posterior estimates are very dierent.
CONFRONTING MODEL MISSPECIFICATION
12
∗
The ination target (π ) is another example in point. Our prior on this parameter is
very loose, overing the range from
marginal posterior distribution for
1%
π∗
to
8%
for the annualized rates (Table 1). The
is very wide for both the DSGE model and for
the merged model, but the distribution for the merged shifts to the left and gives a
substantial probability (more than
apital share
α1
so that the sum
45%)
to the target below
4%.9
The estimate of the
has inreased and the estimate of the labor share
α1 + α2
α2
has dereased
in the merged model is onsiderably smaller than that in the
DSGE model, implying that this soure of real rigidity is strong.
Perhaps most notable hanges pertain to some persistene parameters. As shown in
Table 4, the
90% probability intervals for the parameters ρp , φp , and ρa
are muh wider
in the merged model than in the DSGE model alone. The posterior distributions for
persistene parameters tend to have a long fat tail toward zero, indiating muh more
unertainty about the highly persistent shok proesses than the DSGE model would
reommend.
Remember that a ombined number of parameters from the two models is very large
and the shape of the posterior probability density over this high-dimensional parameter
spae is extremely non-Gaussiann full of skewness and fat-tails. When we ompute the
marginal
90%
probability interval of one parameter by
the parameters,
the
η
90%
and
integrating out all the rest of
it is not unommon that some posterior mode estimates fall outside
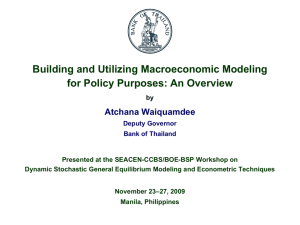
probability intervals as indiated in Tables 3 and 4. Take the two parameters
φw
as an example. The posterior-mode estimates of these two parameters are
outside the orresponding
marginal 90% probability intervals.
dimensional joint probability density funtion of
η
and
φw .
Figure 1 plots the two-
It an be seen from the
gure that the shape of this distribution has a mass probability density around the
boundary dened by
η =0
and
φw = 0
oupled with fat long tails. Sine this two-
dimensional probability density has already been marginalized by integrating out the
other hundreds of parameters in the merged model, it gives us only a glimpse of the
omplexity of the shape of the high-dimensional joint probability density, whih is
beyond visualization.
The resultant disagreement between the joint distribution and a marginal distribution also shows up in the estimate and inferene of
q11 ,
whih measures the duration in
whih the DSGE model dominates the BVAR model. The posterior-mode estimate of
q1,1 is outside the 90% probability interval and the marginal distribution of q11 is learly
9Our sample overs the several high ination periods. The estimated target is muh lower if we use
only the sample after 1987.
CONFRONTING MODEL MISSPECIFICATION
skewed to the right. The estimate of
q1,1
is
0.309,
implying that the duration in whih
the DSGE model dominates the BVAR model is about
90%
13
1.5
quarters. As judged by the
probability interval, the duration is unlikely to last for more than
the other hand, the estimate of
q2,2
is
0.72
quarters. On
and thus the most likely duration in whih
the BVAR model dominates the DSGE model is about
last as long as
3
3.5 quarters.
The duration an
7 quarters, as determined by the upper bound of the 90% interval (Table
4).
VI.3.
qi,i ,
A historial perspetive of the role of a model.
The transition probability,
measures the average (unonditional) importane of model
ested in knowing how important model
i
i.
Often one is inter-
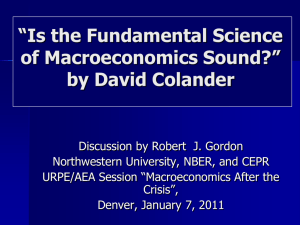
is at a partiular time of the history. Figure
2 displays the posterior probabilities of the DSGE model. Clearly, the DSGE model is
operative throughout the history, but for the most part, the probability of the DSGE
model being near one lasts no more than one quarter at a time, onsistent with the
estimate reported in Table 4. Moreover, the estimated DSGE model performs poorly
during the reessions, as indiated by the shaded bars in Figure 2.
In ontrast, the probability of the BVAR model near one (i.e., the probability of the
DSGE model near zero in Figure 2) tends to last for a few quarters at a time.
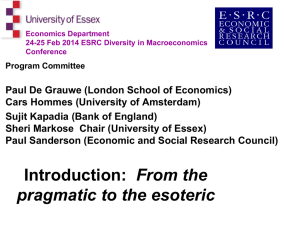
The result that the DSGE model is operative sporadially throughout the history
an be partially explained by Figure 3, whih displays the log values of preditive
densities of the merged model, the DSGE model, and the BVAR model. Clearly the
merged model has higher preditive densities than both the DSGE and BVAR models
throughout the entire history.
The times when the preditive density of the DSGE
model is higher than the BVAR model are irregular and sattered without muh duration. Although the MDD for the DSGE model is muh higher than the MDD for the
BVAR model, the data prefers the DSGE model only intermittently throughout the
sample.
VI.4.
Prior sensitivity.
speiations.
The MDD of a partiular model is very sensitive to prior
In partiular, the BVAR model has hundreds of parameters and the
MDD varies wildly with dierent priors.
The Minnesota-like prior used in Smets
and Wouters (2007) ignores ross eets among variables and the orrelation between
the onstant term and other oeients. Sims and Zha (1998) introdues additional
dummy-observation omponents of the prior that inorporate orrelations in prior beliefs about all oeients (inluding the onstant term) in every equation. Thus, the
model is pulled toward a form in whih either all variables are stationary with means
CONFRONTING MODEL MISSPECIFICATION
14
equal to the sample averages of the initial onditions or there are ointegration relationships.
The Sims and Zha (1998) prior has been found to improve out-of-sample foreasts
in a variety of ontexts with eonomi time series.
Indeed, when we use the exat
prior reommended by Sims and Zha (1998), the log MDD of the BVAR is inreased to
5894.6,
as ompared to
5685.7
in Table 5. This MDD is about
150
in log value higher
than the DSGE ounterpart (Table 5). Given this stark fat, one might onlude that
the DSGE model must play no or little role in the merged model spae. This onlusion
would be inorret. The resultant merged model has the log value of MDD being in
the range from
6039.0
to
6044.4.
The MDD of the merged model is muh higher than
the MDD of the BVAR, beause the DSGE model ontinues to form an integral part
of the model spae in tting the data. The posterior estimate of
while the posterior estimate of
q2,2
rises to
0.833.
q1,1
rises to
0.473,
Moreover, the posterior probabilities
of the DSGE model throughout the history have a pattern similar to Figure 2.
In general, when the prior speiation for an individual model hanges, the MDD
an hange drastially. But our extensive experiments indiate that the merged model
pooling together the two models is insensitive to hanges in prior speiations, in the
sense that it dominates individual models by allowing both models to form an integral
part of the data generating proess.
VII. Eonomi impliations
We are now in a position to disuss eonomi impliations when one takes expliit
aount of both model unertainty and parameter unertainty in our merged framework.
VII.1.
Output utuations.
A shok to apital or investment, suh as a apital
depreiation shok, plays an important role in output utuations.
Table 6 shows
that ontributions from the apital depreiation shok aount for lose to
utuations in output in the short run (within two years) and about
utuations in the longer run (for three to ve years).
40%
50%
of
of output
The DSGE model, if it is
treated in isolation, would underestimate the magnitude of the ontributions from the
apital depreiation shok in output utuations. The underestimation is at least by
10
perentage points for most foreast horizons, as reported in Table 6.
VII.2.
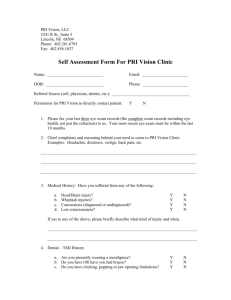
Posterior distributions.
Figure 4 displays the marginal posterior distribu-
tions of four key strutural parameters from the merged model (left hand olumn)
CONFRONTING MODEL MISSPECIFICATION
and the DSGE model alone (right hand olumn).
15
The posterior distributions from
the merged model unover onsiderably more unertainty about the parameters than
what is implied by the DSGE model alone. Moreover, the posterior distributions shift,
giving more probability to the untrodden regions.
•
For the ination oeient in the Taylor rule (φπ ), the merged model puts
almost zero probability on the value below
1.5
isolation would put mass probability around
90%
•
, while the DSGE model in
1.5
with a onsiderably tighter
probability interval.
For the Calvo prie parameter (ξp ), the posterior distribution from the merged
model shifts to the right, giving substantial probability to the values between
0.6 and 0.8 as well as between 0.1 and 0.4.
•
For the Calvo wage parameter (ξw ), the posterior distribution from the merged
model shifts to the left, giving onsiderable probability to the values between
between 0.1 and 0.6, whereas the posterior distribution from the DSGE model
estimated in isolation onentrates around 0.4 with a muh tighter
90%
prob-
ability interval.
•
′′
For the parameter (S ) measuring investment adjustment osts, the posterior
distribution from the merged model spreads out to the values beyond 2, indiating that the higher investment adjustment osts (between 2 and 4) is probable.
Our estimates show that the estimation of the DSGE model utilizes roughly one
third of the data points in the sample. It is unsurprising that the error bands of DSGE
parameters are wider for the merged model. What is new in our ndings, however, is
that the error bands in the merged model are muh more than
1.73
(a square root of
three) times those when the DSGE model is estimated alone with all the data points.
Figure 2 provides an insight of our ndings.
Sine the DSGE model dominates the
BVAR model only for the periods in whih the data have more similarity than the
data in other periods, the data that experiene large utuations (as in the reession
periods) are exluded in the estimation of DSGE parameters. This exlusion results
in onsiderably more unertainty about the estimates than what the number of data
points would suggest.
VII.3.
Dynami responses.
Figure 5 shows the impulse responses of output, on-
sumption, real wage, and ination to a one-standard-deviation shok to apital depreiation. The left hand olumn shows the responses generated from the estimated
merged model and the right hand olumn shows the responses from the DSGE model
CONFRONTING MODEL MISSPECIFICATION
16
when it is estimated in isolation. Comparing the two olumns side by side, one an see
the notable dierenes between the merged model and the DSGE model.
•
Output responses in the merged model are very persistent, while the orresponding responses in the DSGE model alone return to the steady state after
two and a half years.
•
The magnitude of onsumption and real wage responses in the merged model
is onsiderably larger than that in the DSGE model when it is estimated separately.
•
A shok to apital depreiation is a negative shok to the apital stok and
thus the agent's wealth. As a result, onsumption falls due to the wealth eet,
but the marginal ost of apital rises due to the deline in the apital stok.
When the DSGE model is estimated in isolation, the rise in the marginal ost
of apital slightly dominates the fall in the real wage.
Thus, the inrease in
ination responses is signiant statistially but the magnitude is insigniant
eonomially.
In the merged model, however, the fall in the real wage over-
weighs the rise in the marginal ost of apital so that ination fall. In ontrast
to the results generated from the DSGE model alone, ination responses are
predominantly negative in the short run (within the two years) before they rise
in the longer run (after the third year).
Similar to the ndings disussed in previous setions, the error bands of impulse responses in the merged model (left hand olumn in Figure 5) are onsiderably wider
than those generated by giving the DSGE model all the weight. These results emphasize the underlying unertainty ignored by disarding the BVAR model in the model
spae.
VIII. Conlusion
When a partiular model is usable for poliy presriptions, eonomists understand
that the model is an approximation at best and should be used only with a grain of salt.
A positive question is how to quantify the degree to whih the model is misspeied.
Using a strutural DSGE model and a redued-form BVAR model as an eonomi
laboratory, we demonstrate that a merger of the two models exposes how misspeied
both models are.
In partiular, we show that even though the MDD for the DSGE
model is muh higher than the MDD for the BVAR model, the DSGE model dominates
the BVAR model sporadially for only one third of the history. The estimated results
CONFRONTING MODEL MISSPECIFICATION
17
from the merged model signiantly alter the eonomi impliations derived from the
DSGE parameters and their impulse responses.
The framework studied in this paper is general enough to be appliable to a variety
of eonomi questions beyond the partiular appliation used in this paper. One an,
for example, study a strutural BVAR model by identifying eonomi shoks suh as
a monetary poliy shok, a redit shok, an oil prie shok, and a tehnology shok.
One an then merge this strutural BVAR model with the DSGE model that has the
same set of eonomi shoks. The formal ommuniation between these two strutural
models, failitated by our framework, allows the researher to reonile the dierenes
between impulse responses implied by two isolated models when they are estimated
separately. Moreover, the approah explored in this paper allows for more than two
models, and the models inluded in the merged framework need not be nested.
Appendix A. Detailed data desription
All data are onstruted from the original data in the Haver Analytis Database.
The onstruted data, the original data identiers, and the data soures are desribed
below.
GDPH
.
• YtData = LN16NUSECON
(CNUSECON + CSUSECON - CSRUUSECON)∗100/JCXFEUSNA
Data
• Ct
=
.
LN16NUSECON
)∗100/JCXFEUSNA
• ItData = (CDUSECON + FNEUSECON
.
LN16NUSECON
/100
• wtData = LXNFCUSECON
JCXFEUSNA .
JCXFEUSNAt .
• πtData = JCXFEUSNA
t−1
LXNFHUSECON .
=
• LData
t
LN16NUSECON
Data = FFEDUSECON .
400
JCXFEUSNA .
=
• QData
t
GordonPrieCDplusES
•
FFRt
LN16NUSECON:
Civilian noninstitutional population: 16 years and over.
Breaks in population are eliminated from 10-year ensuses and post 2000 Amerian Community Surveys using error of losure method.
This fairly simple
method was used by the Census Bureau to get a smooth population monthly
population series. This smooth series redues the unusual inuene of drasti
demographi hanges. Soure: BLS.
GDPH: Real gross domesti produt (2005 dollars). Soure: BEA.
CNUSECON: Nominal personal onsumption expenditures: nondurable goods.
Soure: BEA.
CSUSECON:
Nominal onsumption expenditures: servies. Soure: BEA.
CONFRONTING MODEL MISSPECIFICATION
CSRUUSECON:
18
Nominal personal onsumption expenditures: housing and
utilities. Soure: BEA.
CDUSECON:
Nominal personal onsumption expenditures: durable goods.
Soure: BEA.
FNEUSECON:
Nominal private nonresidential investment: equipment & soft-
ware. Soure: BEA.
JCXFEUSNA:
PCE exluding Food and Energy: Chain Prie Index (2005=100).
Soure: BEA.
LXNFCUSECON:
Nonfarm business setor: ompensation per hour (1992=100).
Soure: BLS.
LXNFHUSECON:
Nonfarm business setor: hours of all persons (1992=100).
Soure: BLS.
FFEDUSECON: Nnnualized federal funds eetive rate. Soure: FRB.
GordonPrieCDplusES: Investment deator. The Tornquist proedure is used
to onstrut this deator as a weighted aggregate index from the four qualityadjusted prie indexes:
private nonresidential strutures investment, private
residential investment, private nonresidential equipment & software investment,
and personal onsumption expenditures on durable goods. Eah prie index is a
weighted one from a number of individual prie series within this ategories. For
eah individual prie series from 1947 to 1983, we use Gordon (1990)'s qualityadjusted prie index. Following Cummins and Violante (2002), we estimate an
eonometri model of Gordon's prie series as a funtion of a time trend and a
few NIPA indiators (inluding the urrent and lagged values of the orresponding NIPA prie series); the estimated oeients are then used to extrapolate
the quality-adjusted prie index for eah individual prie series for the sample
from 1984 to 2007. These onstruted prie series are annual. Denton (1971)'s
method is used to interpolate these annual series on a quarterly frequeny. The
Tornquist proedure is then used to onstrut eah quality-adjusted prie index
from the appropriate interpolated quarterly prie series.
Appendix B. DSGE equilibrium dynamis
We introdue the notation
∆xt = xt − xt−1 .
the log deviation of the stationary variable
log(Xt /X)).
Xt
We use the hat variable,
x̂t ,
to denote
from its steady state value (i.e.,
x̂t =
The log-linearized equilibrium onditions for our DSGE mode, below,
summarize the equilibrium dynamis.
CONFRONTING MODEL MISSPECIFICATION
π̂t − γp π̂t−1
=
ŵt − ŵt−1
+
q̂kt
q̂kt
r̂kt
=
=
=
0 =
k̂t
=
ŷt
=
ŷt
=
ŵt
=
R̂t
=
19
κp
(µ̂pt + m̂ct ) + βEt [π̂t+1 − γp π̂t ], (prie-Phillips urve)
1 + ᾱθp
κw
π̂t − γw π̂t−1 =
(µ̂wt + mrs
ˆ t − ŵt ) +
1 + ηθw
βEt [ŵt+1 − ŵt + π̂t+1 − γw π̂t ], (wage-Phillips urve)
1
′′ 2
(∆q̂t + α2 ∆ẑt )
S λI ∆ît +
1 − α1
1
−βEt ∆ît+1 +
(∆q̂t+1 + α2 ∆ẑt+1 ) , (investment deision)
1 − α1
1
[α2 ∆ẑt+1 + ∆q̂t+1 ]
Et ∆ât+1 + ∆Ûc,t+1 −
1 − α1
i
β h
(1 − δ)q̂k,t+1 − δ δ̂t+1 + r̃k r̂k,t+1 , (apital deision)
+
λI
σu ût , (apaity utilization)
h
Et ∆ât+1 + ∆Ûc,t+1
1
[α2 ∆ẑt+1 + α1 ∆q̂t+1 ] + R̂t − π̂t+1 , (bond deision)
−
1 − α1
1
1−δ
(α2 ∆ẑt + ∆q̂t )
k̂t−1 −
λI
1 − α1
δ
1−δ
− δ̂t + 1 −
ît , (apital law of motion)
λI
λI
(A1)
(A2)
(A3)
(A4)
(A5)
(A6)
(A7)
cy ĉt + iy ît + uy ût + gy ĝt , (resoure onstraint)
(A8)
1
α1 k̂t−1 + ût −
(α2 ∆ẑt + ∆q̂t ) + α2 l̂t , (prodution funtion) (A9)
1 − α1
1
r̂kt + k̂t−1 + ût −
(α2 ∆ẑt + ∆q̂t ) − l̂t , (labor & apital demand)(A10)
1 − α1
ρr R̂t−1 + (1 − ρr ) [φπ π̂t + φy ŷt ] + σr εrt , (interest rate rule)
(A11)
where
m̂ct
mrs
ˆ t
Ûct
Note that
π̂t
=
1
[α1 r̂kt + α2 ŵt ] + ᾱŷt ,
α1 + α2
(A12)
(A13)
= η l̂t − Ûct ,
=
βb(1 − ρa )
λ∗
ât −
[λ∗ ĉt − b(ĉt−1 − ∆λ̂∗t )]
λ∗ − βb
(λ∗ − b)(λ∗ − βb)
βb
[λ∗ Et (ĉt+1 + ∆λ̂∗t+1 ) − bĉt ],
+
(λ∗ − b)(λ∗ − βb)
is ination,
ŵt
(Tobin's q), ît is investment,
tehnology shok proess,
is real wage,
q̂t
ât
the utilization rate of apital,
q̂kt
(A14)
is the shadow prie of existing apital
is the biased tehnology shok proess,
ẑt
is the neutral
is the risk premium (preferene) shok proess,
r̂kt
is the real rental prie of apital,
δ̂t
ût
is
is the apital
CONFRONTING MODEL MISSPECIFICATION
depreiation shok proess,
ŷt
is output,
ĉt
R̂t
is onsumption,
20
k̂t
lt
and ˆ
is the nominal rate of interest,
is the apital stok,
ĝt
is hours worked.
is government spending,
The steady-state variables are given by
r̃k
=
λI
− (1 − δ),
β
(A15)
uy
≡
α1
r̃k K̃
=
,
µp
Ỹ λI
(A16)
iy
= [λI − (1 − δ)]
cy
= 1 − iy − gy .
α1
,
µp r̃k
(A17)
(A18)
The new parameters introdued in the above equilibrium onditions are
1
2 1−α1
λI = (λq λα
,
z )
1
2 α1 1−α1
,
λ∗ = (λα
z λq )
∆λ̂∗t =
1
(α1 ∆q̂t + α2 ∆ẑt ),
1 − α1
µp
θp =
,
µp − 1
(1 − βξp )(1 − ξp )
,
ξp
1 − α1 − α2
ᾱ =
,
α1 + α2
µw
θw ≡
,
µw − 1
κp =
κw =
Note that
gy
is the average ratio of government spending to output,
ratio of onsumption to output,
the average prie markup,
µwt
investment-spei tehnology,
ost share of apital input,
depreiation rate,
σu
(1 − βξw )(1 − ξw )
.
ξw
b
α2
iy
is the average
µpt
is the average ratio of investment to output,
is the average wage markup,
λz
cy
λq
is the growth rate of
is the growth rate of neutral tehnology,
is the ost share of labor input,
is internal habit,
S ′′
δ
α1
is the
is the average apital
represents the investment adjustment osts,
represents the urvature of the ost funtion of variable apital utilization,
the probability that a rm annot adjust its prie,
indexation,
and
γw
ξw
is
γp
ξp
is
measures the degree of prie
is a fration of households who annot reoptimize their wage deisions,
measures the degree of wage indexation.
In addition to all the equilibrium onditions, we have 7 shok proesses:
log µwt = (1 − ρw ) log µw + ρw log µw,t−1 + σw εwt − φw σw εw,t−1 , (prie markup)
log µpt = (1 − ρp ) log µp + ρp log µp,t−1 + σp εpt − φp σp εp,t−1 , (wage markup)
log zt = (1 − ρz ) log z + ρz log zt−1 + σz εzt , (neutral tehnology)
CONFRONTING MODEL MISSPECIFICATION
21
log qt = (1 − ρq ) log q + ρq log qt−1 + σq εqt , (embodied tehnology)
log At = (1 − ρa ) log A + ρa log At−1 + σa εat , (risk premium)
log δt = (1 − ρd ) log δ + ρd log δt−1 + σd εdt , (apital depreiation)
log G̃t = (1 − ρg ) log G̃ + ρg log G̃t−1 + σg εgt + ρgz σz εzt , (spending)
where
ε represents
an i.i.d. normal shok and
σ
represents the orresponding standard
deviation.
To ompute the equilibrium, we eliminate both
leaving
9
9
equations and
variables, we have
7
9
variables
ût
and
r̂kt
by using (A5) and (A8),
π̂t , ŵt , ît , q̂kt , ĉt , k̂t , ŷt , ˆlt ,
and
orresponding observable variables (exept
R̂t .
q̂kt
Out of these
and
k̂t )
for our
estimation. Finally, we have one additional observable variable, the biased tehnology
shok
q̂t ,
used in our estimation.
In addition to the
proesses for the
7
7
9
equilibrium onditions, we have
strutural shoks,
equations onerning the
DSGE equations in total.
7
4
7
equations desribing the AR
equations desribing the
2
MA proesses, and
expetational terms in the system. Thus, there are
27
CONFRONTING MODEL MISSPECIFICATION
22
Table 1. Prior distributions of strutural parameters
Prior
Parameters
Desription
Distributions
General parameters
αprior
βprior
5%
95%
b
Habit
Beta
1.0
2.0
0.025
0.776
α1
Capital share
Beta
85.5869
159.4377
0.3
0.4
α2
Labor share
Beta
38.4721
25.4535
0.5
0.7
η
1/(Frish
Gamma
1.0576
0.3106
0.2
10
100(λq − 1)
Biased teh growth
Gamma
1.8611
3.0112
0.1
1.5
100(λ∗ − 1)
Output growth
Gamma
1.8611
3.0112
0.1
1.5
100 (β
Disount fator
Gamma
1.5832
1.0126
0.2
4.0
−1
− 1)
elastiity)
Firm parameters
σu
Utilization ost
Gamma
3.7790
2.4791
0.5
3.0
S
Adjustment ost
Gamma
1.0576
0.6213
0.5
5.0
µp − 1
Prie markup
Gamma
1.0
5.5
0.0094 0.5446
µw − 1
Wage markup
Gamma
1.0
5.5
0.0094 0.5446
4δ
Depreiation
Beta
5.4257
41.4890
0.05
0.2
ξp
Calvo priing
Beta
2.0384
3.0426
0.1
0.75
γp
Prie indexation
Beta
1.0
1.0
0.05
0.95
ξw
Calvo wage
Beta
2.0384
3.0426
0.1
0.75
γw
Wage indexation
Beta
1.0
1.0
0.05
0.95
ρr
Interest persistene
Beta
1.0
2.0
0.025
0.776
φπ
Ination oef
Gamma
2.4373
1.0876
0.5
5.0
Output oef
Gamma
1.0
1.0
0.05
3.0
Ination target
Gamma
2.9043
0.7690
1.0
8.0
′′
Poliy parameters
φy
400 log π
∗
Note: 5%
interval.
and 95% demarate the low and high bounds of the
90%
probability
CONFRONTING MODEL MISSPECIFICATION
23
Table 2. Prior distributions of shok parameters
Prior
Parameters
Desription
Distributions
Persistene parameters
αprior
βprior
5%
95%
ρp
Prie markup AR
Beta
1.0
2.0
0.025
0.776
φp
Prie markup MA
Beta
1.0
2.0
0.025
0.776
ρw
Wage markup AR
Beta
1.0
2.0
0.025
0.776
φw
Wage markup MA
Beta
1.0
2.0
0.025
0.776
ρgz
Spending on teh
Gamma
1.8611
1.5056
0.2
3.0
ρa
Preferene
Beta
1.0
2.0
0.025
0.776
ρq
Biased teh
Beta
1.0
1.0
0.05
0.95
ρz
Neutral teh
Beta
1.0
1.0
0.05
0.95
ρd
Depreiation
Beta
1.0
2.0
0.025
0.776
σr
Monetary poliy
Inverse Gamma
0.4436
0.0009
0.0005
1.0
σp
Prie markup
Inverse Gamma
0.4436
0.0009
0.0005
1.0
σw
Wage markup
Inverse Gamma
0.4436
0.0009
0.0005
1.0
σg
Gov spending
Inverse Gamma
0.4436
0.0009
0.0005
1.0
σz
Neutral teh
Inverse Gamma
0.4436
0.0009
0.0005
1.0
σa
Preferene
Inverse Gamma
0.4436
0.0009
0.0005
1.0
σq
Biased teh
Inverse Gamma
0.4436
0.0009
0.0005
1.0
σd
Depreiation
Inverse Gamma
0.4436
0.0009
0.0005
1.0
q11
DSGE model
Dirihlet
5.6667
1.0
0.5905 0.9911
q22
BVAR model
Dirihlet
5.6667
1.0
0.5905 0.9911
Standard deviations
Transition matrix parameters
Note: 5%
interval.
and 95% demarate the low and high bounds of the
90%
probability
CONFRONTING MODEL MISSPECIFICATION
24
Table 3. Posterior distributions of strutural parameters
DSGE model alone
Parameters
Desription
Merged model
Mode
5%
95%
Mode
5%
95%
General parameters
b
Habit
0.544
0.493
0.624
0.528
0.597
0.954
α1
Capital share
0.177
0.151
0.203
0.250
0.212
0.290
α2
Labor share
0.804
0.747
0.818
0.679
0.614
0.740
η
1/(Frish
0.005
0.003
0.167
0.399
0.578
6.801
100(λq − 1)
Biased teh growth
1.507
1.215
1.911
1.438
1.145
1.700
100(λ∗ − 1)
Output growth
0.483
0.400
0.569
0.519
0.221
0.576
100 (β
Disount fator
0.228
0.081
0.909
0.222
0.113
0.781
−1
− 1)
elastiity)
Firm parameters
σu
Utilization ost
2.018
1.404
3.787
0.654
0.672
3.947
S
Adjustment ost
0.800
0.608
1.278
0.710
0.495
3.032
µp − 1
Prie markup
0.000
0.000
0.001
0.000
0.000
0.017
µw − 1
Wage markup
0.003
0.015
0.176
0.109
0.043
0.965
4δ
Depreiation
0.145
0.064
0.204
0.111
0.013
0.170
ξp
Calvo priing
0.372
0.308
0.760
0.540
0.211
0.839
γp
Prie indexation
0.121
0.028
0.408
0.394
0.024
0.721
ξw
Calvo wage
0.303
0.269
0.606
0.069
0.096
0.604
γw
Wage indexation
0.790
0.088
0.954
0.040
0.081
0.957
ρr
Interest persistene
0.618
0.572
0.687
0.477
0.490
0.744
φπ
Ination oef
1.480
1.392
1.693
2.008
1.820
3.230
Output oef
0.066
0.052
0.101
0.141
0.099
0.228
Ination target
5.576
3.863
10.109
5.764
1.693
8.583
′′
Poliy parameters
φy
400 log π
Note: 5%
interval.
∗
and 95% demarate the low and high bounds of the
90%
probability
CONFRONTING MODEL MISSPECIFICATION
25
Table 4. Posterior distributions of shok parameters
DSGE model alone
Parameters
Desription
Merged model
Mode
5%
95%
Mode
5%
95%
Persistene parameters
ρp
Prie markup AR
0.786
0.587
0.878
0.188
0.037
0.972
φp
Prie markup MA
0.627
0.276
0.820
0.168
0.060
0.802
ρw
Wage markup AR
0.992
0.987
0.997
0.990
0.815
0.988
φw
Wage markup MA
0.530
0.305
0.827
0.000
0.040
0.695
ρgz
Spending on teh
0.947
0.490
1.348
1.690
0.490
2.138
ρa
Preferene
0.988
0.973
0.995
0.988
0.242
0.953
ρq
Biased teh
0.994
0.988
0.997
0.989
0.971
0.993
ρz
Neutral teh
0.942
0.927
0.961
0.903
0.910
0.989
ρd
Depreiation
0.915
0.854
0.975
0.888
0.869
0.990
σr
Monetary poliy
0.003
0.002
0.003
0.002
0.002
0.003
σp
Prie markup
1.012
0.593
2.109
1.348
0.014
1.095
σw
Wage markup
0.023
0.017
0.065
0.009
0.016
0.404
σg
Gov spending
0.029
0.026
0.031
0.023
0.022
0.033
σz
Neutral teh
0.008
0.007
0.009
0.007
0.007
0.010
σa
Preferene
0.061
0.035
0.137
0.030
0.013
0.075
σq
Biased teh
0.006
0.006
0.007
0.004
0.004
0.007
σd
Depreiation
0.096
0.065
0.261
0.098
0.069
1.008
q1,1
DSGE model
0.309
0.415
0.684
q2,2
BVAR model
0.720
0.689
0.861
Standard deviations
Transition matrix parameters
Note: 5%
interval.
and 95% demarate the low and high bounds of the
90%
probability
CONFRONTING MODEL MISSPECIFICATION
26
Table 5. Marginal data densities
Merged model
DSGE
BVAR
5848.90 - 5854.03
5735.49 - 5736.39
5685.74
Table 6. Output variane deompositions: ontributions from a apital
depreiation shok (%)
Quarters
4
8
12
16
20
Merged
48.60
47.89
43.77
40.54
38.58
DSGE alone
39.75
35.91
30.18
27.41
26.25
CONFRONTING MODEL MISSPECIFICATION
27
2500
2000
1500
1000
500
0
15
1
10
0.8
0.6
5
0.4
0.2
η
0
0
φ
w
Figure 1. The joint posterior probability density of
η
and
φw ,
after all
the other parameters are integrated out through the posterior distribution. Note that
and
φw
η
represents the inverse Frish elastiity of labor supply
is the moving-average (MA) oeient in the wage markup shok
proess.
CONFRONTING MODEL MISSPECIFICATION
28
1
0.9
Smoothed probabilities of the DSGE model
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0
1965
1970
1975
1980
1985
1990
1995
2000
2005
Figure 2. The posterior probabilities that the DSGE model is seleted
by the data. The shaded bars mark the NBER reession dates.
2010
29
Figure 3. Log values of preditive densities from the three models.
1965
−60
1960
−50
−40
−30
−20
−10
0
10
20
30
Log predictive densities
40
DSGE
BVAR
Merged
1970
1975
1980
1985
1990
1995
2000
2005
2010
CONFRONTING MODEL MISSPECIFICATION
CONFRONTING MODEL MISSPECIFICATION
Merged model
DSGE model alone
5
5
4
4
3
3
2
2
1
1
0
1
2
3
Inflation coefficient in Taylor rule
4
0
4
4
3
3
2
2
1
1
0
0
0.2
0.4
0.6
0.8
Price stickness parameter
1
0
5
5
4
4
3
3
2
2
1
1
0
0
0.2
0.4
0.6
0.8
Wage stickness parameter
1
0
3
3
2
2
1
1
0
0
1
2
3
4
Investment adjustment costs
30
5
0
1
2
3
Inflation coefficient in Taylor rule
4
0
0.2
0.4
0.6
0.8
Price stickness parameter
1
0
0.2
0.4
0.6
0.8
Wage stickness parameter
1
0
1
2
3
4
Investment adjustment costs
5
Figure 4. Marginal posterior distributions of some key strutural pa-
rameters for the merged model (left olumn) and for the DSGE model
when it is estimated in isolation (right olumn).
CONFRONTING MODEL MISSPECIFICATION
−3
Merged model
x 10
31
DSGE model alone
Output
0
−5
−10
−3
x 10
Consumption
0
−5
−10
−3
Real wage
x 10
−2
−4
−6
−8
−10
−12
−14
−3
x 10
1
Inflation
0.5
0
−0.5
−1
4
8
12
Quarters
16
4
8
12
Quarters
16
Figure 5. Impulse responses to a apital depreiation shok for the
merged model (left olumn) and for the DSGE model when estimated
in isolation (right olumn). The shaded area represents
90%
posterior
probability bands and the thik line represents the median estimate.
CONFRONTING MODEL MISSPECIFICATION
32
Referenes
Altig, D., L. J. Christiano, M. Eihenbaum,
and
J. Linde (2004):
Firm-
Spei Capital, Nominal Rigidities and the Business Cyle, Federal Reserve Bank
of Cleveland Working Paper 04-16.
Brok, W. A., S. N. Durlauf,
and
Unertain Eonomi Environment,
K. D. West (2003): Poliy Evaluation in
Brookings Papers on Eonomi Ativity, 1, 235
301.
Chari, V., P. J. Kehoe,
and
E. R. MGrattan (2000): Stiky Prie Models of
the Business Cyle: Can the Contrat Multiplier Solve the Persistene Problem?,
Eonometria, 68(5), 11511180.
Cogley, T.,
and
T. J. Sargent (2005): The Conquest of U.S. Ination: Learning
and Robustness to Model Unertainty,
Cummins, J. G.,
Review of Eonomi Dynamis, 8, 528563.
and G. L. Violante (2002):
Investment-Spei Tehnial Change
in the United States (1947-2000): Measurement and Maroeonomi Consequenes,
Review of Eonomi Dynamis, 5, 243284.
and
Del Negro, M.,
Models for VARs,
F. Shorfheide (2004): Priors from General Equilibrium
International Eonomi Review, 45, 643673.
(2008): Forming Priors for DSGE Models (and How It Aets the Assessment of Nominal Rigidities), Manusript, Federal Reserve Bank of New York and
University of Pennsylvania.
Denton, F. T. (1971): Adjustment of Monthly or Quarterly Series to Annual Totals:
An Approah Based on Quadrati Minimization,
Assoiation, 66, 99102.
Journal of the Amerian Statistial
Diebold, F. X. (1991): A Note on Bayesian Foreast Combination Proedures, in
Eonomi Strutural Change: Analysis and Foreasting, ed. by A. H. Westlund, and
P. Hakl, pp. 225232. Springer-Verlag, New York, NY.
Fisher, M.,
and
D. F. Waggoner (2010): Mixture Models and Bayesian Model
Seletion, Unpublished manusript.
Geweke, J.,
and
G. Amisano (forthoming): Optimal Predition Pools,
of Eonometris.
Gordon, R. J. (1990):
The Measurement of Durable Goods Pries.
Journal
University of
Chiago Press, Chiago,Illinois.
Hansen, L. P.,
and
T. J. Sargent (2001):
Maroeonomi Theory,
Aknowledging Misspeiation in
Review of Eonomi Dynamis, 4, 519535.
CONFRONTING MODEL MISSPECIFICATION
Liu, Z., D. F. Waggoner,
and
33
T. Zha (2010): Soures of Maroeonomi Flutu-
ations: A Regime-Swithing DSGE Approah, Unpublished manusript.
Sims, C. A. (2003): Probability Models for Monetary Poliy Deisions, Manusript,
Prineton University.
Sims,
C. A.,
D. F. Waggoner,
and
T. Zha (2008):
in Large Multiple-Equation Markov-Swithing Models,
Methods for Inferene
Journal of Eonometris,
146(2), 255274.
Sims, C. A.,
els,
and
T. Zha (1998): Bayesian Methods for Dynami Multivariate Mod-
International Eonomi Review, 39(4), 949968.
Smets, F.,
and
R. Wouters (2007): Shoks and Fritions in US Business Cyles:
A Bayesian DSGE Approah,
West, M.,
and
J. Harrison
Amerian Eonomi Review, 97, 586606.
(1997): Bayesian Foreasting and Dynami Models.
Springer, 2nd edn.
Federal Reserve Bank of Atlanta, Federal Reserve Bank of Atlanta and Emory
University