Anti-jamming MTI Radar using Variable Pulse-Codes*
advertisement

Anti-jamming MTI Radar using Variable Pulse-Codes*
by
Kenny Lin
B.S. Electrical Engineering
U.S. Naval Academy, 2000
Submitted to the Department of Electrical Engineering and Computer Science in
partial fulfillment of the requirements for the degree of
Master of Science in Electrical Engineering and Computer Science
BARKER
at the
MASSACHS iij
OF TECHNOLOGY
MASSACHUSETTS INSTITUTE OF TECHNOLOGY
JUL 3 12002
May 2002
LIBRARIES
@ Kenny Lin, MMII. All rights reserved.
The author hereby grants to MIT permission to reproduce and distribute publicly
paper and electronic copies of this thesis document in whole or in part.
.........
A u th o r ......................................................... I ..... ....
Department of Electrical Engineering an4 Computer Science
May 24, 2002
Certified by...............
C. Robey
(raf
Associate Group Leader, Group 101
incoln Laboratory
Supe isor
.<Thesis
Certified by ................
L~-~c~
~Davi
Prfsf
H. Staelin
'Electrical Engineering
alThas-Stervisor
Accepted by.............
Arthur C. Smith
Chairman, Department Committee on Graduate Students
*This work was sponsored by the Department of the Navy and the Department of the Air Force under
Contract F19682-00-C-0002. Opinions, interpretations, conclusions, and recommendations are those of the
author and not necessarily endorsed by the United States Navy or United States Air Force.
Anti-jamming MTI Radar using Variable Pulse-Codes
by
Kenny Lin
Submitted to the Department of Electrical Engineering and Computer Science
on May 24, 2002, in partial fulfillment of the
requirements for the degree of
Master of Science in Electrical Engineering and Computer Science
Abstract
A pulsed Doppler radar is vulnerable to advanced repeat-back jamming techniques. Rapidly
advancing technology producing inexpensive, high performance commercial off-the-shelf
(COTS) components enable the construction of an electronic countermeasure (ECM) system capable of exploiting this vulnerability. This thesis addresses this threat by examining
the nature of this vulnerability and developing a modification to the pulsed Doppler/MTI
radar system.
Pulsed Doppler radar systems use pulse compression waveforms such as pseudonoise
(PN) coded binary phase-modulated sequences. Repeat-back jamming listens, stores, and
repeats back the radar's transmitted signal to block out all other return signals. If a different
PN-code is used for each pulse, the radar receiver will be minimally affected by the jamming.
However, a varying PN code creates range sidelobe variation that degrades the integrated
signal-to-clutter ratio by a factor of ,1 where N is the code length. This severely limits
the ability to perform Doppler and Moving-Target Indication (MTI) processing for clutter
suppression on the radar return.
To recover this performance loss several receiver filtering and digital signal processing
techniques are tested. PN code selection for optimum filter performance is explored resulting
in a 7-dB signal-to-clutter performance recovery for a 32-bit code. Digital pulse compression,
matched filtering, and adaptive digital equalization filtering methods are applied to the
radar return to equalize differences created by variable PN codes. Different equalization
algorithms with various subsets of PN-codes are presented and simulated with data sets
modelled after existing radar systems. Successful correction reduces clutter, minimizes the
performance degradation to MTI due to variable pulse-codes, and resists some types of
DRFM jamming.
Thesis Supervisor: Frank C. Robey
Title: Associate Group Leader, Group 101
MIT Lincoln Laboratory
Thesis Supervisor: David H. Staelin
Title: Professor
2
Acknowledgments
First and foremost, I would like to thank my advisor, Dr. Michael A. Koerber, for his time
spent teaching and advising me at MIT Lincoln Laboratory. It is through his mentorship,
tireless tutelage and fine example that I have learned so much about signal processing and
engineering research. I would like to thank my thesis supervisors Dr. David H. Staelin and
Dr. Frank C. Robey for their guidance and contribution to my education. I would like
to thank my friends and staff members at Lincoln Laboratory for their assistance and for
making my time here much more enjoyable. Finally, I would like to thank my girlfriend,
Yingli Zhu, and my family, Chiun-wen, Su-ching, and Frank for their love and support in
all my endeavors.
3
Contents
1
2
9
Introduction
1.1
Pulsed Doppler Radar ....
10
1.2
MTI Radar
10
1.3
Electronic Countermeasures
10
1.4
Variable Pulse-Code Radar
11
1.5
Performance Metrics . . . . .
11
1.6
Contributions of this Thesis
12
..........
13
Radar System Simulation
2.1
Radar System Model . . . . . . . . . . . . . . . .
15
2.2
Target Model . . . . . . . . . . . . . . . . . . . .
16
2.3
Environmental Model
. . . . . . . . . . . . . . .
17
2.3.1
Noise Model . . . . . . . . . . . . . . . . .
17
2.3.2
Clutter Model
. . . . . . . . . . . . . . .
18
2.3.3
Jamming Model
. . . . . . . . . . . . . .
19
. . . . . . . . . . .
22
2.4
2.5
Return Processing Model
2.4.1
Pulse Compression
. . . . . . . . . . .
22
2.4.2
Matched Filtering
. . . . . . . . . . .
24
2.4.3
Weighting . . . . . . . . . . . . . . . . . .
24
2.4.4
Doppler Processing . . . . . . . . . . . . .
26
2.4.5
MTI Implementation.
. . . . . . . . . . .
28
2.4.6
Adaptive Digital Equalization Filtering
Simulation Output . . . . . . . . . . . . . . .
4
30
. . . . . . . . . . . . . .
31
3
4
Variable Pulse Code Radar
32
3.1
32
Doppler Degradation ...............................
3.1.1
Target Effects .......
3.1.2
Clutter Effects
........
. ...
..
..
....
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Pulse Compression Filtering
4.1
4.2
36
43
Sidelobe Reduction . . . . . . . . . . . . . . . . . . . . . . . . . . . .
44
. . . . . . . . . . . . . . . . . . . . . . . . .
46
Pulse Compression Filters . . . . . . . . . . . . . . . . . . . . . . . .
48
. . . . . . . . . . . . . . . . . . . . . . . . .
51
SNR Loss . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
54
Pulse Compression Waveforms
Doppler and MTI Performance
4.3.1
Adaptive Digital Equalization Filtering
5.1
34
43
4.2.1
4.3
.
Matched Filter Waveforms . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.1.1
5
...
Filter Implementation
56
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
56
5.1.1
Time Domain Implementation
. . . . . . . . . . . . . . . . . . . . .
57
5.1.2
Frequency Domain Implementation . . . . . . . . . . . . . . . . . . .
57
5.2
Equalization Strategies . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
57
5.3
Doppler and MTI Performance
. . . . . . . . . . . . . . . . . . . . . . . . .
60
SNR Loss . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
61
5.3.1
6
Anti-Jamming Performance
62
7
Conclusion
64
5
List of Tables
5.1
Comparison of SNR for different filtering methods. . . . . . . . . . . . . . .
6
61
List of Figures
2-1
Radar Simulation Application GUI . . . . . . . . . . . . . . . . . . . . . . .
14
2-2
Simulation Flow and System Block Diagram . . . . . . . . . . . . . . . . . .
15
2-3
Radar System Variables . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
15
2-4
Target Component Magnitude and Phase
. . . . . . . . . . . . . . . . . . .
16
2-5
Target Variables
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
17
2-6
Environment Variables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
18
2-7
Complex Gaussian "White" Noise Component . . . . . . . . . . . . . . . . .
19
2-8
Clutter Component . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
20
2-9
Repeat-Back Jammer Block Diagram . . . . . . . . . . . . . . . . . . . . . .
20
2-10 False Targets Created by Repeat-Back Jamming
. . . . . . . . . . . . . . .
21
2-11 MTI Filtered Return with Repeat-Back Jamming . . . . . . . . . . . . . . .
22
2-12 Return Processing Variables . . . . . . . . . . . . . . . . . . . . . . . . . . .
23
2-13 Matched Filtering vs. Pulse Compression for a 32-Bit PN Code . . . . . . .
25
2-14 Matched Filter Output with Taylor Weighting . . . . . . . . . . . . . . . . .
26
2-15 Matched Filter Output Weighting Comparison
. . . . . . . . . . . . . . . .
27
2-16 Target and Clutter Comparison for Doppler Processing . . . . . . . . . . . .
29
2-17 Doppler Processed Radar Return . . . . . . . . . . . . . . . . . . . . . . . .
29
2-18 MTI Filter Impulse and Frequency Response
. . . . . . . . . . . . . . . . .
30
2-19 MTI Processed Radar Return . . . . . . . . . . . . . . . . . . . . . . . . . .
31
2-20 Plotting Options . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
31
3-1
Constant and Variable Pulse-Code Comparison . . . . . . . . . . . . . . .
32
3-2
Matched Filter Output and Doppler Spectrum for a Constant Pulse-Code
33
3-3
Matched Filter Output and Doppler Spectrum for Variable Pulse-Codes
3-4
Variable Pulse-Code Radar Doppler Return without Clutter . . . . . . . .
7
.
33
37
3-5
Variable Pulse-Code Radar Doppler Return with Clutter . . . . . . . . . . .
37
3-6
Constant Pulse-Code Radar Doppler Return Profile
. . . . . . . . . . . . .
42
3-7
Variable Pulse-Code Radar Doppler Return Profile . . . . . . . . . . . . . .
42
4-1
Variable Pulse-Code Radar Doppler Return using Random Codes . . . . . .
45
4-2
Variable Pulse-Code Radar Doppler Return using ±3 Codes . . . . . . . . .
45
4-3
Mean and Variance of Random and ±3 32-bit PN Codes . . . . . . . . . . .
46
4-4
Variable Pulse-Code Doppler Radar Showing Partial Effectiveness
. . . . .
47
4-5
Variable Pulse-Code MTI Radar Showing Partial Effectiveness
. . . . . . .
48
4-6
Time Response of Reciprocal Spectrum
. . . . . . . . . . . . . . . . . . . .
49
4-7
Time Response of Reciprocal Spectrum - Nearest Root Inside Unit Circle
50
4-8
Time Response of Reciprocal Spectrum - Nearest Root Outside Unit Circle
51
4-9
Doppler Processing with ±3 Variable Pulse-Codes, Pulse Compression . .
52
4-10 MTI Processing with ±3 Variable Pulse-Codes, Pulse Compression . . . . .
52
4-11 Pulse Compression and MTI Filtered Spectrum Profile - Constant Pulse-Code 53
4-12 Pulse Compression and MTI Filtered Spectrum Profile - Variable Pulse-Codes 53
4-13 Matched Filter and MTI Filtered Spectrum Profile . . . . . . . . . . . . . .
54
4-14 Pulse Compression and MTI Filtered Spectrum Profile . . . . . . . . . . . .
55
5-1
Adaptive Equalization Filter System . . . . . . . . . . . . . . . . . . . . . .
57
5-2
Variable Pulse-Code Doppler Radar with Flat Spectrum Equalization Filtering 58
5-3
Variable Pulse-Code MTI Radar with Flat Spectrum Equalization Filtering
59
5-4
Pulse Compression versus Flat Spectrum Equalization . . . . . . . . . . . .
59
5-5
Variable Pulse-Code MTI Radar with
60
6-1
Constant Pulse-Code MTI Radar in Repeat-Back Jamming Environment
6-2
Variable Pulse-Code MTI Radar in Repeat-Back Jamming Environment
8
1 st
Pulse Equalization Filtering . . .
.
.
62
.
63
Chapter 1
Introduction
Radar systems in hostile environments face the challenge of detecting targets in the midst
of noise, clutter, and jamming. The magnitudes of these interference signals are typically
many times that of the target signal. Many techniques have been developed to mitigate
this interference and extract the target's parameters.
Two classes of radar systems designed for this purpose are the moving target indication
(MTI) radar and the pulsed Doppler (PD) radar. Both systems utilize the Doppler effect
to separate moving targets from relatively stationary clutter. Clutter typically consists of
unwanted radar reflections from the sea, terrain, weather, or chaff.
MTI and PD radars are widely used and play a critical role in many modern radar
systems. Civilian systems rely on MTI and PD radar for air surveillance, especially in bad
weather. Military applications include the detection of low flying aircraft or missiles from
shipboard and airborne radar platforms.
Military radar systems often operate in hostile environments and may be targeted by
electronic countermeasures (ECM) such as repeat-back or digital radio-frequency memory
(DRFM) jamming. DRFM jamming captures radar signals to amplify and repeat-back to
the radar to flood the receiver with erroneous data. Advances in technology have made
inexpensive, high-performance radio frequency parts available so that a DRFM jamming
system can easily be developed to blind a PD radar.
This thesis addresses this threat
by examining the nature of this vulnerability and developing a modification to the pulsed
Doppler/MTI radar system to resist some forms of DRFM jamming.
9
1.1
Pulsed Doppler Radar
Pulsed Doppler (PD) radar uses Doppler frequencies to determine a target's range rate by
analyzing the return from two or more transmitted pulses. Because of the Doppler effect,
the radar return of a moving object will be shifted in frequency relative to the frequency of
the transmitted signal and stationary objects. PD radars use this difference in frequency
to detect moving objects and determine their relative speeds [12].
Using this technique,
a moving object with a return signal completely obscured by clutter and noise may still
be detected after Doppler processing if its frequency exceeds the frequency range occupied
by the clutter return. The radar system assumed in this thesis is a shipboard or groundbased pulsed Doppler/MTI radar system with a phased array of antennas that transmits a
series of narrow band, beam-formed pulses. The transmitter will use binary phase encoded
waveforms [12].
1.2
MTI Radar
Moving Target Indication (MTI) Radar is an older system that uses delay-line cancellers to
filter out clutter. The current radar return is compared with previous returns to isolate differences. The relatively stationary clutter is subtracted out and moving targets remain [11].
A newer implementation of MTI modifies the pulsed Doppler radar return by adding a notch
filter around the Doppler frequencies of the clutter in order to improve the signal-to-clutter
ratio [13, 6]. This is the implementation used in this thesis.
1.3
Electronic Countermeasures
In addition to noise and clutter, radar systems in hostile environments may encounter jamming. Jamming, or electronic countermeasures (ECM), is an effort by enemy systems to
degrade the capability of friendly radar systems.
It can be passive, in the form of chaff
and decoys, or active, in the form of electromagnetic (EM) transmissions with the intent
to deceive or confuse a radar. Electronic counter-countermeasures (ECCM) are efforts by
10
friendly systems to counter enemy ECM. ECM and ECCM are elements of electronic warfare
(EW) [10]. As military forces become more dependent on electromagnetic systems, EW has
become crucial on the battlefield. The variable pulse-code modification to the radar system
proposed in this thesis can be considered an ECCM system.
1.4
Variable Pulse-Code Radar
PD and MTI radars are susceptible to deceptive ECM (DECM) repeaters.
This type of
active jamming system, also known as a repeat-back or DRFM jammer, records and repeats
back a radar's transmitted waveform to flood the receiver with erroneous data [10].
A
possible counter to this system is to use non-repetitive waveforms within each coherent
processing interval (CPI) by varying the waveform transmitted by each pulse. If there is
little correlation between the current and previous waveform, the signal transmitted by the
DRFM jammer will be processed as noise and have minimal effect on the radar return.
If a different pseudo random or pseudonoise (PN) code [3] is used for each pulse, the
radar receiver will be minimally affected by the jamming. However, when the return signal
is Doppler processed, any variation in the filtered output from these PN codes will degrade
the integrated signal-to-clutter ratio. The energy no longer falls in a single Doppler bin
after processing. This will be described in detail in Section 3.1. The strength of the clutter
signal is amplified and the target signal can be obscured. This severely limits the ability
to perform Doppler and MTI processing on the radar return when different PN codes are
used within a CPI.
1.5
Performance Metrics
Radar system performance will be measured by the ability of the radar to detect a target
obscured by interference. The strength of the target's signal-to-noise and signal-to-clutter
ratios will be mathematically predicted and empirically verified. This allows us to quantify
performance degradation or improvement as we modify the system.
11
1.6
Contributions of this Thesis
There is a significant performance loss in the ability to Doppler process or apply an MTI
filter to the return of a variable pulse-code radar. The performance loss was found to be the
result of clutter range sidelobe variation. This thesis presents several receiver filtering methods by which this performance may be recovered. A simulation framework and graphical
user interface created for PD and MTI radar simulation will be presented. The signal-toclutter ratio degradation of the return when using variable code sets and matched filtering
will be quantified. Pulse compression is explored as an alternative. However, pulse compression filters do not meet the signal-to-noise ratio (SNR) optimality criteria of matched
filtering. Adaptive digital equalization filtering methods are applied to the matched filter
output to attempt to recover PD and MTI performance. The SNR loss of applying the
equalization filter will be compared with the SNR loss of a pulse compression filter. Pulse
code selection for maximum filter performance and weighting techniques for further performance improvements will be explored. Finally, the effect of jamming on constant and
variable pulse-code sequences will be shown to test the success of the variable pulse-code
radar solution to repeat-back jamming.
12
Chapter 2
Radar System Simulation
The variable pulse-code Doppler/MTI radar system and all return data were simulated in
Matlab®. The time and cost required to perform the modifications required to test this
system in hardware were impractical for the scope of this thesis.
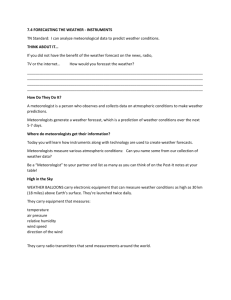
A graphical user interface (GUI) was created to facilitate testing as seen in Figure 21.
The simulation allows the user to recreate the scenarios discussed in this thesis and
interactively reconfigure the system and environmental model to examine the effects of any
changes. Options allow the user to modify the characteristics of the radar transmitter and
receiver, create multiple targets, and selectively introduce noise, clutter, and jamming.
The simulated radar return data is a composite of targets, noise, clutter, and jamming,
which are individually computed based on user specified transmitter characteristics. They
are then additively combined and sampled in a three-dimensional matrix representing a
CPI. Any user selected receiver filtering and digital signal processing is performed on this
matrix. This process is shown in Figure 2-2. The user is able to view the output at each
intermediate stage in the formation of the processed output.
13
Figure 2-1: Radar Simulation Application GUI
Target
Noise
Environ
Sampling
A Filtering a Weighting
Adaptive
Equaliza-
a
4
D
pler/-4
Output
Clutter
Figure 2-2: Simulation Flow and System Block Diagram
2.1
Radar System Model
The radar systems simulated in this thesis are based on modern pulsed Doppler and MTI
radars [11].
The simulation allows user selection of the relevant system characteristics:
carrier frequency, chiprate, pulse repetition frequency (PRF), pulse-code length, pulse-code
type and number of pulses. The default values are shown in Figure 2-3.
CamreiFreq f33
GH2
ChipRate
F -
KH z
PI.ses
PRF
(* Constant PuiseCode
Code Length
b2s
100MHz
10
Pulses
Variable Pulse Code
Code Type I
F~ Look Code
Figure 2-3: Radar System Variables
The transmitted signal is a binary phase encoded pseudonoise (PN) code. A binary phase
encoded, or binary phase-shift keyed (BPSK) signal is one modulated by a predetermined
sequence. In this case, the sequence is a series of +1's and -1's that appear to be random but
can be deterministically generated [9].
For pulse compression and matched filtering, it is
desirable to select sequences with an auto-correlation function with minimal peak sidelobe
height.
15
2.2
Target Model
Targets are created as point scatterers with specified constant radar cross section (RCS) at
a given range with some Doppler component to simulate velocity from one pulse repetition
interval (PRI) to the next. The magnitude of the Doppler shift, fd, of the target is calculated
by
2v
A
2vfe
c
_
where v is its velocity, A is signal wavelength, and
(2.1)
f, is the
carrier frequency. This Doppler
shift is applied incrementally to the scaled return from each pulse to create a moving target
whose target return is modelled by
rT(n) = Oej2rfdnp
where
UT
(2.2)
is the target signal level, n is the PRI number, and Tp is the PRI.
The weighted Doppler shift is then scaled and placed at the specified range to be pointby-point multiplied with the transmitted waveform envelope to create the target return
signal. Figure 2-4 shows the magnitude and phase plots of the return space with three
targets at difference velocities over one coherent processing interval (CPI). The simulation
allows user selection of velocity, range, and return strength of multiple targets as shown in
Figure 2-5.
Target Magntude
Target Phase
20
1.4-
10
1.2
0.8
10
0.2 -30
10000....
15
40010
X1
5
0
2
4000
Pr10e
6
2
2000
Range (m)
0 0
Ranrge (m)
pLIIS
0
0
Figure 2-4: Target Component Magnitude and Phase
16
4
Pk
Figure 2-5: Target Variables
2.3
Environmental Model
The targets, noise, clutter, and jamming are assumed to be independent. Thus, they can be
combined additively in a matrix representing range and PRI to create the radar's operating
environment. The simulation allows user selection of noise level, noise type, clutter level,
clutter type, clutter doppler, jamming level, and jamming type as shown in Figure 2-6 with
the default values.
2.3.1
Noise Model
The noise component of the environment is comprised of both internal receiver noise and external thermal noise [12]. The effects of noise are well described by the Gaussian probability
density function (PDF):
p(x) =
e
1
v'27ro.2
2
,
(2.3)
where a.2 is the variance of x and xO is the mean value of x. This is sometimes referred to
as Gaussian white noise. For circular symmetric complex Gaussian noise, the PDF is
17
Figure 2-6: Environment Variables
1
p(x)=
where
|1 |12
Iix~xoII2
2
e
is the 2-norm (magnitude squared).
(
(2.4)
.
For this simulation, we will model the
combined effect using this complex Gaussian PDF. The result is shown in Figure 2-7.
2.3.2
Clutter Model
Clutter is any undesired portion of the radar return created by the environment. This can be
echoes from land, sea, weather, and even wildlife. Chaff, passive reflectors used as a decoy
in EW, is also considered clutter. Clutter is generally too complex to form a uniformly
satisfactory model. Significant efforts have been made in an attempt to better understand
and model clutter returns. This thesis will not focus on these efforts and will instead use
a simplified approach to simulating clutter. An empirical observation can be made relating
radar echo with environmental parameters. The high variability of the clutter return has
been described by Rayleigh, log-normal, and Weibull probability distributions [12].
The
Weibull distribution option in the simulation uses the following PDF,
p(x) = 2(X -')(~1)exp(--((x
a
a
where -y is the shape parameter,
-
P)/a)I),
x ;>
';y,a>0,
(2.5)
p is the location parameter and a is the scale parameter. For
18
Noise
2010
0-
110
x 10
6
5
4
2
Range (m)
0
0
Pulse
Figure 2-7: Complex Gaussian "White" Noise Component
comparison between theoretical calculations and empirical results, a Gaussian distribution
is assumed for the clutter. The resultant clutter matrix is shown in Figure 2-8.
2.3.3
Jamming Model
Jamming, or ECM, is the area of electronic warfare designed to exploit and prevent the
effective use of friendly radar systems. Passive jamming techniques such as chaff have little
motion and are thus ineffective against PD and MTI radars. Active jamming techniques are
of greater concern for PD/MTI radars and can be divided into noise jamming and deceptive
electronic countermeasures (DECM).
Noise jamming is similar to raising the level of thermal noise. It attempts to interfere
with the normal operation of a radar by transmitting enough power in the frequency spectrum of the receiver to raise the noise floor above the strength of any target signals [10].
This can be simulated by increasing the noise level within a CPI.
Deceptive jamming techniques attempt to deceive a radar by repeating back its transmitted signal to mislead the receiver. These techniques may be used to create
false targets,
disrupt tracking, and report false positions [10]. For a radar using binary phase-modulated
19
Clutter
70
60
50
S30-
20_-
15
10
8
6
x 10
2
Range (m)
0
0
Pulse
Figure 2-8: Clutter Component
waveforms, a repeater as shown in Figure 2-9, is required to capture the transmitted code
to successfully create a false target
[141.
This is simulated by using the waveform of the
previous pulse to create 15 false targets. The resulting data is shown in Figure 2-10. Notice
that there is no jamming signal in the first PRI due to the implementation of this type of
repeat-back jamming.
Trigger
Delay
Memory
Receiver
Antennas
Variable
Delay
Amplifier]
Stored
Control
Pulse
Figure 2-9: Repeat-Back Jammer Block Diagram
When the repeater successfully captures a radar's transmitted waveform, it can create
targets at the receiver input and jamming the radar becomes trivial. The effect of successful
20
Jamming
3.532.5-
15
810
10
X 10
5
4
6
2
Range (m)
0
0
Pulse
Figure 2-10: False Targets Created by Repeat-Back Jamming
jamming on an MTI radar is shown in Figure 2-11 where only one of the many targets is real.
The variable pulse-code radar addresses this vulnerability by mitigating the effectiveness of
the repeated signal. This will be further explored in Chapter 6.
21
MTI Filtered Return
80
60
40,
M20,
-20
--
156
x 10
5
4
2
Range (m)
0
0
Doppler
Figure 2-11: MTI Filtered Return with Repeat-Back Jamming
2.4
Return Processing Model
Radar systems employ many signal detection strategies to distinguish between desired
echoes and interference.
Passive and active filtering techniques at the receiver are used
to increase signal-to-noise and signal-to-clutter ratios.
The composite return consisting of the targets and environmental factors are first sampled and filtered using either matched filter or pulse compression filter techniques.
An
adaptive digital equalization filter may be added when using variable pulse-codes. The filtered data is then Doppler or MTI processed. The simulation allows the user selection of
sampling rate, receiver filter type, pulse compression filter length, windowing, MTI implementation, and equalization filtering as shown in Figure 2-12.
2.4.1
Pulse Compression
Pulse compression (PC) and matched filtering (MF) are signal processing strategies for
signal detection improving range resolution and SNR when using waveforms such as binary
phase encoded PN codes. These strategies simultaneously achieve the high output energy
of a long transmit pulse and the range resolution of a short pulse.
22
Figure 2-12: Return Processing Variables
The pulse compression filter is designed to produce a flat frequency response at its output
given the signal for which it was designed at its input [1]. Thus, the frequency response of
the pulse compression filter is the reciprocal of the input signal frequency spectrum. Let
the frequency response of the pulse-code sequence in question, s(n), be given by:
S(f) = DFT(s(n))
where DFT represents the discrete Fourier transform. Then, the pulse compression filter's
frequency response is given by:
H(f) =
1
SMf)
(2.6)
When multiplied with the input frequency spectrum S(f), the time response of the resulting
flat output spectrum would therefore approximate a dirac delta function, thus minimizing
signal sidelobes:
Y(f) =S(f)H(f),
S(f),
= 1<
= 1,
OOt)
thus,
23
y(t) =
2.4.2
(t)
(2.7)
Matched Filtering
Pulse compression and matched filtering are similar and the terms are often mistakenly
used interchangeably. Their difference is an important distinction in this thesis. Whereas
the pulse compression filter is designed for a flat output spectrum, the matched filter design
criteria is to achieve a maximum signal-to-noise ratio. This criteria is met when the matched
filter is the time reversed input signal [1],
h(t) = s(tm - t).
(2.8)
Thus, its frequency response is the complex conjugate of the Fourier transform of the input
signal multiplied by a time shift factor:
H(f)
=
S*(f)ew't,
(2.9)
where tm corresponds to the pulse width of the transmitted signal. A comparison of the
time and frequency responses of a matched filter and pulse compression filter given a 32-bit
PN-code as the input sequence are compared in Figure 2-13. The first two plots show the
magnitude and frequency response of input code sequence. Notice below in the next row
the formation of the matched filter as the time reversed input, and the formation of the
pulse-compression filter as the reciprocal spectrum. The last four plots compare the output
of the matched filter with the pulse compression filter. Notice the flat frequency-spectrum
of the pulse compression filter output and the flat sidelobes in its time response.
This
property will become significant in Chapter 4.
2.4.3
Weighting
Weighting, or windowing, is a technique used to reduce sidelobe levels at the expense of
broadening the main-lobe width and a slight reduction in SNR [7]. Sidelobe levels of the
matched filter output will become a problem for the variable pulse-code radar system and
weighting will be explored as a solution.
Weighting is normally applied to a time domain function to perform spectrum shaping.
24
32-81 P- Cods
0.5
Frequency
---
-
15
A(\ /"\h
AA/Lf~
I
Specotur
f~/'\1
0-
o.
-0.5 -
-1.
-
0
5
10
15
35
25
0
0
Tinm (step)
Matched
Filter Ttme
20
71-0
Frequency
Flesponse
Pulse Compresson Filter Frequency Spectrum
5
0.5-
-10-
0I
-0.5-
-15-
-11
0
5
10
15
25
20
0
35
203
1
20
Time (step)
Pulse Compression Filter Output
30-
30-
25-
25-
20
15
70
Frequency
Matched Fifter Output
20,
'
15-
-
10
1.
5-
-5-
5
.4w 50.
0-30
-20
-10
0
10
20
Tme (slop)
Matched
30
-30
-20
Filler Oulput Frequeny Spectrsmi
-10
0
10
Tme (step)
Pulse Compression Filter Output Specrumn
20
30
40
35 --
35 -
30-
30.
2 5
25
20 -20-
15-
0
15-
10
20
30
Freqency
40
50
00
l1o0
to
20
30
Frequency
40
50
0
Figure 2-13: Matched Filtering vs. Pulse Compression for a 32-Bit PN Code
25
This is the case when weighting is applied across PRIs in a CPI to shape the Doppler
spectrum.
Weighting may also be applied in the frequency domain to reduce sidelobes
in the time domain and shape the waveform of the filtered pulse. Both techniques are
implemented by the simulation. The user is able to choose from uniform
(none), Hamming,
Hanning, Chebyshev, Taylor, and Dolph-Chebyshev weighting functions.
Figure 2-14 shows the application of a 63-point Taylor window on the matched filter
output. The window is applied in the frequency domain to reduce sidelobe levels in the
time domain. The result is shown in Figure 2-15. Notice the reduction in sidelobe levels at
the expense of a lower peak value and broadening of the main lobe. The first sidelobe peak
after the apparent null of the weighted output shows a 1.2 dB improvement.
Matthed
Filter Oulput
Taylor Window Apped m Frequ-ncy
30-.
-30
-
1-35
-40
:20 -
-
10-
55 -
5-40
-30
-20
-10
T,,
0
(Stp)
10
20
30
0
0
10
20
30
40
Freqaoncy
Taylor WMM arform M
mTo1
Malthed FAKe Output wraylor Westaow
50
60
70
0111102
0-
-20 -30-
-70-
-W0
-40
-30
-20
-10
0
10
Ti-. (step
20
30
40
0
10
20
3
Teie (step)
0
5
0
70
Figure 2-14: Matched Filter Output with Taylor Weighting
2.4.4
Doppler Processing
Doppler processing separates signals with different range rates within the radar return. This
allows us to separate the relatively stationary clutter from moving targets. The motion
26
Matched Filter Output Comparison
-+-No Weighting
0 Taylor Weighting
30-
25
5 20
S15-
10-
5C0
-40
-30
-20
-10
0
Time (step)
10
20
30
40
Figure 2-15: Matched Filter Output Weighting Comparison
contributes a frequency shift to the reflection in proportion to its velocity. By comparing
the received signals coherently across several pulses, the frequency shift and therefore range
rate, can be observed. The relation between target velocity and Doppler frequency shift is
shown in Equation 2.1.
The amount of target gain due to Doppler processing can be calculated. Suppose we
have a noisy input signal,
x(n)
=
e2" + v(n).
The discrete Fourier transform (DFT) is then performed to Doppler process the signal. The
result is
X(k)
=
X(k)
=
x(n)e
ei(a-
2wrkn
N
, or,
" + v(n)e--2
.
n
The power of this signal is defined by
P(k)
=
E{x(k)x*(k)}
=
Z
E{eJ(a-T
n,m
iAn--m
+
v(n)v*(m)e-3A(-"0N
27
+
cross terms}.
If we assume Gaussian white noise, we can ignore the cross terms since the noise has zero
mean.
In addition, the noise is uncorrelated from sample-to-sample and from pulse-to-
pulse. Therefore, the expected value is nonzero only for n = m. Our equation may now be
simplified to
P(k) =
eNa
N
Y
)(-")
+
n,m
If
= 27,
S a 6(n 2
m)e-j2
(N-".
(2.10)
n,m
then for the first term,
eAa-)(n-m)
n,rna
=
N 2,
(2.11)
2-rk
which is the peak energy of the target signal after Doppler processing. For the second term,
5 a 6(n
2
-
m)e-i("-
2jO =
n,m
Na2,
(2.12)
n
which is noise energy level after Doppler processing. From Equation 2.11 and Equation 2.12,
we can calculate the Signal-to-Noise (SNR) ratio,
N2
SNR ~ N22 -
Na
N
N-N-SNRO.
U2
Therefore, the Doppler processing gain is 10 logio(N) where N is the number of pulses in
the CPI. For 10 samples, the Doppler processing gain is 10dB.
The advantage of Doppler processing is the ability to detect targets buried within a
significantly stronger clutter return, as long as there is a difference in velocity. This case is
taken to the extreme in Figure 2-16 where we see the clutter dominating the target signal by
approximately 100 dB. Figure 2-17 shows the return after Doppler processing. The clutter
energy has been transformed into the zero Doppler bin and the target can now be clearly
seen in the last Doppler bin.
2.4.5
MTI Implementation
Moving Target Indication (MTI) radar uses the same physical phenomenon as pulsed
Doppler radar.
Doppler frequency shifts over multiple pulses are used to separate sig-
nals by velocity. MTI adds the additional objective of removing clutter to improve the
28
Target Magrntude
Ckuter
1_
130
120
0.8-
110,-
0.6
100
04.
0.2,
1
x15
100
x 1001
X10
0
Range (m)
0
Rn
PUSS
g
()
0 0
S2
Pulse
Figure 2-16: Target and Clutter Comparison for Doppler Processing
Doppler Processed Retum
200
150
-
100 4)
V
50
0-1
-50
15
-10
10
X10
5
0
0
8
246
Range (m)
Doppler
Figure 2-17: Doppler Processed Radar Return
29
signal-to-clutter ratio [11]. Early MTI systems use delay-line cancellers and were limited
in complexity by the capability of analog acoustic devices. The availability of digital technologies has significantly enhanced MTI processing.
The implementation of MTI used in this thesis applies a three-point digital low-pass
filter to the Doppler frequency spectrum. This filter, whose time samples and frequency
response is shown in Figure 2-18, attenuates all low frequency signals including clutter and
leaves only detected targets. The result after MTI processing is shown in Figure 2-19.
UTI FilEW
IM R
eSp
M
.
MTI
3
Filter Frnquency Responm
20
2-
10-
1
2-
0 -
-10
-2-20-r
-2
L
1
I
05
1
15
2
ml.w
30L4
25
3
35
4
0
5
10
15
2
Fesqlmmy
F
0
35
40
45
50
Figure 2-18: MTI Filter Impulse and Frequency Response
2.4.6
Adaptive Digital Equalization Filtering
When using a variable pulse-code radar, the output of the Doppler filter will be degraded
beyond use due to the differences between codes. This is fully explored in Chapter 3. An
adaptive digital equalization filter is applied to the matched filter output as one approach
to recover this performance. This type of filter attempts to equalize an input to a given
function. It will change its coefficients to minimize the error between the input sequence
and that function.
For this thesis, the implementation of the equalization filter will be performed digitally
in the frequency domain. The details of the process and results are discussed in Chapter 5.
30
MTI Filtered Return
60
40
S20
0
-20
-40
15-
->
10
7
A8
55
X10
2
Range (m)
0
J
3
Doppler
Figure 2-19: MTI Processed Radar Return
2.5
Simulation Output
The individual elements in the formation of the simulated radar return may all be plotted
along with the intermediate and final results of any return processing. The user is able to
plot the target, noise, clutter, jamming, composite return, filtered return, weighted return,
Doppler processed return, MTI processed return, and adaptively equalized returns as shown
in Figure 2-20.
Plotting Options
Noised
MTI
E qualze /T
Figure 2-20: Plotting Options
31
Chapter 3
Variable Pulse Code Radar
The variable pulse-code radar modifies the transmitted waveform of the pulsed Doppler
or MTI radar. Instead of selecting one PN code sequence, the variable pulse-code radar
transmits a newly selected code with every PRI as shown in Figure 3-1. The transmitted
waveform is then no longer predictable and thus difficult to jam.
Ccnstant 32-4it Pulse-Cods, 10 Pulse CPI
Varable 32-bit Pulse-Code, 10 Pulse CP
1.5,-
30
-0
10-
4-P
-0
_1
30
8
10
206
4
10
Tim (stop)
0 0
PRI
me
Tre0
(sep)
0Pl
PRI
Figure 3-1: Constant and Variable Pulse-Code Comparison
3.1
Doppler Degradation
The use of variable pulse-codes presents several problems. The matched filter output from
the radar echoes of each pulse will have different range sidelobes. When the return is Doppler
processed, the effect of changing sidelobe magnitude and phase results in a spreading effect
thereby creating false signals in the Doppler spectrum. Over multiple clutter points, this
effect significantly degrades the signal-to-clutter ratio.
32
For example, let us examine the Doppler spectrum of the matched filter output given a
point scatterer. When the same pulse-code is used for each PRI, the matched filter output
in that range bin will be constant and contribute to only one Doppler bin in the Doppler
spectrum as we see in Figure 3-2.
Matched Filter Output with a Constant Pulse-Code
Doppler
350
Spectrumr (Constant Code)
.
300,
25,s.-
250
.
200 ,
--
50
-5, .--
-
.. -.
-50
-
60
--.
10
-100
-
--
-
60
400
10
40
0 0
Ran08 (M)
6
~Doppler
Plse Repetition Interval
0
0
Frequency
Figure 3-2: Matched Filter Output and Doppler Spectrum for a Constant Pulse-Code
However, when a different pulse-code is used for each PRI, the sidelobes of the matched
filter outputs will differ due to the variations between pulse-codes. These variations will
proportionally contribute to different Doppler bins. The Doppler spectrum of the outputs
will be spread across all Doppler bins. For this paper this will be referred to as a false
Doppler effect since it appears that the energy is in the wrong Doppler bin. We see this
spreading in Figure 3-3.
Matched Filter Output wilh Variable Puise-Codes
Doppler
40,
350
3-
250-
Spectrui
(Vanable Codes)
.
10-20
-00-
-20
80
50
80
10
Ranga
(M)
0
0
u
R
010
Range (M)
Inl
0
0
Doppler Frequency
Figure 3-3: Matched Filter Output and Doppler Spectrum for Variable Pulse-Codes
33
3.1.1
Target Effects
Fortunately, the peak value of the pulse-compressed target return signal is minimally affected by changing from constant to variable pulse-codes. In the absence of clutter, the false
Doppler effect created by varying sidelobes is insignificant for the relatively low number of
individual targets. Given that the length of every different pulse-code remains the same,
the magnitude and phase of the zero-lag matched filter output will remain the same and
thus the return signal can be successfully Doppler processed.
This is proven by calculating the variance of the matched filter output at zero-lag given
a point scatterer. In the absence of noise and clutter, the return signal is r(n) = s(n - m),
where s(n) is a randomly selected, 32-bit PN code and m denotes some time delay. At
m = 0, given a sampled signal, we can define the matched filter output as
min(N,N-1)
y(n) =
E
s(n - k)s(N - 1 - k),
or,
k=max(,n-(N-1))
min(N-1,N-1+1)
=E
s(N - 1 + l - k)s(N - 1 - k),
(3.1)
k=max(0,l)
where 1 =
n - (N - 1) and 1 > 0 advances the return signal through the filter. Thus, the
peak output is at
(0) = y(N - 1) and the first sidelobes' value is at
(1) = y(N). From
this, we can compute the matched filter's range sidelobe performance. In order to perform
this analysis, we will model Sn, a randomly chosen 32-bit code sequence, as a stochastic
process [8].
This allows computation of the mean of the matched filter output's range
sidelobes.
To simplify analysis, let S,,
elements, Sn, belong to the set S
s(N - 1 - n), where N is the number of samples. The
=
{-1, +1} with equal probability, thus having zero mean.
Furthermore, Si is assumed orthogonal to Sj for all i 54
j. Based on these assumptions, the
autocorrelation of Sn is
R(k+l,k)
=
E{Sk+jSk},
=
;
0 ;
34
=0
4i0
(3.2)
Returning to equation 3.1 and substituting Sk for s(N - 1
k) yields
min(N-1,N-1+1)
(l) =
(3.3)
Sk+lSk,
E
k=max(0,1)
from which the mean value of the sidelobe level quickly follows via Equation 3.2
min(N-1,N-1+l)
Y
E{Q(l)} =
E{Sk+lSk}, and
k=max(0,1)
min(N-1,N-1+l)
E(
=
R(k+l,k)
k=max(O,i)
N
1=0
(3.4)
l0
where N is the number of samples of S,.
To calculate the variance of p(l), we must first compute the second moment of
E{y 2 (l)}= IEE{Si+,SiSj+Sj},
y(l);
or
i=j
= Y:EfSi2±si~+ EES+iSi}ESISjjl
i=j
i#j
(3.5)
For the peak, zero-lag value where 1 = 0,
E{
2(0)} =
i=j
E{S4} + E E{sf }E{Sh},
i#j
or,
Efy2(0)} = N + N(N - 1) = N 2 .
(3.6)
For the sidelobe, non-zero-lag values where 1$ 0, return to Equation 3.5 and compute
N-
l| non-zero terms
E=
E{Sf S+ 1}
+0, or
i=j
=
Let us define N = N - 1l.
N - l.
(3.7)
Then from Equation 3.6 and Equation 3.7, we find that the
second moment is
35
E
=
2(1)
N
(3.8)
,
;
?if0
where N is the number of terms in the overlapped region and equal to N -
111.
From
Equation 3.4 and Equation 3.8, we see that the variance of the matched filter's range
sidelobes,
y(l),
is
Var{y(l)} ={
'
>-111
(3.9)
1=4
Thus, given any PN code sequence, the peak (zero-lag) value of the matched filter output
has no intrinsic variation with code, but the non-zero-lag values have a non-zero variance.
The implication is that given a set of random sequences of length N, the peak values of
the matched filter output will produce an accurate Doppler frequency estimate. However,
the Doppler spectrum from the sidelobe non-zero-lag values will not be resolved due to the
variations from pulse to pulse.
This result is also verified by simulation. The match filtered target return in the absence
of clutter shows a constant peak value but different sidelobes.
A plot of the Doppler
processed return from a variable pulse-code radar in the absence of clutter is shown in
Figure 3-4.
3.1.2
Clutter Effects
When clutter is reintroduced, it acts as multiple point scatterers, each with varying sidelobes
as we saw in Equation 3.9. This variance gives each sidelobe a potentially non-zero value in
the target's range bin and final Doppler spectrum. The aggregate spreading effect of these
false Doppler values created by the range sidelobe leakage of clutter thus effectively buries
the target signal. This can be seen in Figure 3-5.
To quantify this effect, we need to look at the Doppler spectrum. Let x, (t) represent
the target in MF gate 1. The Fourier transform of the
11h
gate is
P-1
Yi(w) =
lip(O~xi(Ae -jwp.
(3.10)
p=o
where
yp(l),
the ideal MF output of Equation 3.1, acts as a "weighting function" from PRI
to PRI. For the 1 = 0 case the mean and second moment can be computed as
36
Doppler Processed Return
60-
50
--7 Target
40
30-
10
-
0
20.0
-10
-30- 4
-
-
x151
5
4
Range (m)
0
0
Doppler
Figure 3-4: Variable Pulse-Code Radar Doppler Return without Clutter
Doppler Processed Return
110
Cut
100
90-
50
40
o
70
30
15-
x 101
Range (m)
0
0
Doppler
Figure 3-5: Variable Pulse-Code Radar Doppler Return with Clutter
37
P-1
E{Yo(w)} = E
E{pp(O)}xo(p)e-iwP
p=o
Substituting with Equation 3.4,
P-1
E{Yo(w)} = N E xo(p)ei-P.
p=o
(3.11)
E{yp()Q*(O)}xO(p)x*(q)e-j,(P-q)
Z
pAq
E{1Yo(w)j2}
=
Z E{y2(O)}xo(p)x4(q)e-jw(P-q) + E
E{yp(O)}E{yq(0)XO(p)4(q)e-j,(p-q)
p9q
p=q
Thus,
E{jY(w)2} = N 2 E xo(p)x*(q)e-3W(P~-).
p,q
(3.12)
From Equation 3.11
|E{Yo(w)1 2 = N 2
5 XO(p)X*(q)e-jw(p-q) .
(3.13)
p,q
Combining Equation 3.12 and Equation 3.13 we see that the variance is
Var{Yo(w)} = 0;
17 0.
(3.14)
This is as we expected; using variable pulse-codes will not affect the peak value of the MF
output. For the 1 / 0 case the mean, second moment and variance are
P-1
E{Y(w)} =
E{yp(l)}x(p)e-iwP,
p=o
1 = 0.
38
(3.15)
E{IYi(w)12 }
=
ZE{Qp(l)pq(l)}x(p)x*(q)e-jw(P~q)
p,q
(N - j1j)xi(p)x*(q)e-jw(P-q) + E E{Qip(l) }E{yq(l)}
=
p=q
1(p)X* (q)e~-w(P-q)
ppq
P-1
E{IYi(w) 12} = (N - 111) E IXI(p)12 .
p=o
(3.16)
P-1
Var{YijLl}
=
(N - Ill)
Z
IX(p)12 .
(3.17)
p=O
Thus, the variation in range sidelobe levels causes a rise in Doppler filtered output sidelobes.
Now suppose that in MF bin 1 = 0 we have
X0 (p)=
(3.18)
xt(p) + xc(P).
where xO is our output composed of a target, xt, and clutter, x,. For analysis, we can assume
that the target and clutter Doppler are easily separated. Substitution in Equation 3.11 yields
P-1
o(L,) = N E (xt (p) + xc(p))e-'P
p=O
(3.19)
where P is the number of pulses in the CPI. If we let Xt =
-tejwP, the Doppler spectrum
becomes
Y0(w) = N E atej('t-w)P + N EZxc(p)e-jP,
P
P
(3.20)
Now we can compute the final signal-to-clutter ratio. With wt = w, from Equation 3.20, we
see that the target signal energy, Et is,
Et
=
(NPat)2 .
The clutter signal energy, Ec, is computed by
Ec = N 2 E{xc(p)x*(q)}ejw(P-q)
P~q
39
(3.21)
We assume xc(p) and xc(q) are independent. For all p 5
q, the expected value of xc(p)
and xc(q) is zero for a Gaussian distribution. Thus, in the remaining case where p = q, the
energy is
Ec = N 2 Z E{xc(p)12}
P
Using Parseval's theorem and Raleigh's energy theorem which equates energy in the time
domain with energy in the frequency domain, we calculate the clutter signal energy as
Ec = BcN 2No,
(3.22)
where Be is the bandwidth of the clutter and No is the spectral level of the clutter. From
Equation 3.21 and Equation 3.22, the computed signal-to-clutter ratio is
(put)2
BcNO
(3.23)
To compute the effect of the clutter sidelobes on the target signal, suppose we have
some type of clutter signal present in the previous range bin. The 1 = 1 correlation lag of
this clutter signal will affect the 1 = 0 correlation lag of the target signal. It will cause an
increase in spectral power as per Equation 3.17.
P-1
Var{Yjwj} = (N - 1l) E E{|xi(p)j 2}.
p= 0
Using Parseval's theorem this becomes
Var{Yj(w)}
=
(N - 1lI)NoBc.
(3.24)
Summing over all non-zero-lag values, 1, the total contribution to clutter from these cells
becomes
N-1
Z Var{Y(w)}
I
=
NoBc2
Z(N-l)
=1
=
40
NoBcN(N -1)
Thus,
Var{Y(w)} = NoBc(N - 1)N.
(3.25)
Let us compare this to the non-overlapping sidelobe Doppler spectrum that we calculated
in Equation 3.23. When we introduce random MF range sidelobes, we see that our noise
power level has increased by a N(N-1) factor that is not separable from the target.
SNRo
SNRL =
-
(Pa-t) 2 .pN
(3.26)
SNR
N 0
(3.27)
BcNo
N(N - 1)'
.
This leads to approximately a N 2 reduction in SNR. For a 32-bit PN code where N = 32,
this is approximately a -30dB (1Olog 32x
31
) loss in SNR performance. Figures 3-6 and 3-7
rotate our three-dimensional plots to show the profile of the Doppler spectrum for a pulsed
Doppler radar using constant versus variable pulse-codes. We see that there is in fact a
30dB clutter sidelobe ceiling over the target in the Doppler spectrum due to the MF in a
variable pulse-code radar.
This empirically verifies the calculated performance degradation associated with matched
filtering in a variable pulse-code radar. We have proven that zero-lag peak values have no
variance when matched filtered. However, the variance in clutter sidelobe strength across all
non-zero-lag values create a false Doppler signal. This results in a significant SNR loss and
buries the target in the Doppler spectrum. Thus, any attempt to recover this performance
will need to address the strength of these clutter sidelobes. This can be done directly, which
is explored in Chapter 4, or indirectly, which is explored in Chapter 5.
41
Constant Pulse-Code Radar Doppler Return Profile
120 r
100
F
--.
Cluttr->
--..-.--.-.
80k-
4)
.....
-. - '**'-*--
...
-..
..
.-.-.-.
60 - -
Range (Tm)
40 -
Target-
- -- --.-.
.
.
-
..
~77
20
/
0
I,
1
2
3
4
5
6
7
8
9
10
Doppler
Figure 3-6: Constant Pulse-Code Radar Doppler Return Profile
Variable Pulse-Code Radar Doppler Processed Profile
120
Range
i)
--- . ... -.
. -.
. --.
-.
100
Clutte r-
-/
80
60
..
...
.. N.
N
--x
E
40
...........
...........
20
0
1
2
3
4
5
6
7
8
9
Doppler
Figure 3-7: Variable Pulse-Code Radar Doppler Return Profile
42
10
Chapter 4
Pulse Compression Filtering
In the previous chapter, we discovered that for a variable pulse-code radar, Doppler and
MTI processing performance is significantly degraded by clutter sidelobe strength at the
matched filter output.
Using a different pulse-code for each PRI results in a different
matched filter for each PRI. When the clutter component of the radar return is matched
filtered, the output response is different for each PRI. Though the zero-lag peak values
remain unchanged, the sidelobe values differ significantly. These differences spread energy
across the Doppler spectrum. Over many clutter points, the aggregate effect is a loss of the
target signal-to-clutter ratio.
To mitigate this Doppler spread effect caused by using variable pulse-codes, we can
either reduce clutter sidelobe strength at the matched filter output or process the return
signal to undo the negative effects of variable pulse-codes.
Performance recovery using
digital signal processing techniques will be discussed in the following chapter.
4.1
Matched Filter Waveforms
Clutter sidelobe strength at the matched filter output is dependent on the variance of the
non-zero-lag values of the transmitted waveform's autocorrelation function as we saw in
Equation 3.9. Its contribution to the Doppler spectrum is shown in Equation 3.17. Thus,
the magnitude of the Doppler effect is dependent on the transmitted waveform which is
determined by the selected pulse-code sequence. By selecting code sequences with minimal
non-zero-lag variance, we can attempt to mitigate the false Doppler spread effect.
43
4.1.1
Sidelobe Reduction
The study of code sequences and their properties is a significant field of study in digital
communications and signal processing. To recover Doppler performance, our code selection
will focus on minimizing the output sidelobes of the matched filter. Barker codes are a
small family of codes, none longer than length N
R,
N
)0
=
13
[3]. They are characterized by
(4.1)
T
±1,0, r
where Rc(T) is the autocorrelation value at lag
T.
0
Notice that all sidelobe values are within
±1. This is a desirable property given our requirements, but these codes are unsuitable for
the application at hand. With a maximum length of 13-bits and such a small set of codes
with this ±1 sidelobe property, the waveforms from a radar using Barker codes would be
highly predictable and susceptible to jamming.
For the 32-bit codes used in this simulation, we can apply the same selection concept
by relaxing the criteria posed in Equation 4.1. A search through all 32-bit codes yielded no
codes for whom all sidelobe values are within ±2. However if we allow
Re(T) =NIT
.(4.2)
= 0
±3,±2,i1,0, T
0.2
4
then there are 3,376 codes to choose from. Figure 4-1 shows the Doppler spectrum profile
when using randomly generated pulse-codes and Figure 4-2 shows the Doppler spectrum
when using our set of ±3 codes. The comparison shows approximately a 7 dB drop in the
clutter floor when using the ±3 codes.
Let us return to our variance calculation in Section 3.1.2 to verify our theory against
the empirical results.
As in Section 3.1.1, we treat the codes as a stochastic process.
Equation 3.9 gives us the variance of the non-zero-lag values of the matched filter output.
Figure 4-3 shows the results of an exact analysis [4] of the variance of the 32 bit PN
sequences' auto-correlation lags, i.e., range-sidelobes for both the unfiltered case and the
case where the 32 bit sequences were filtered to include only those sequences for which the
range-sidelobes were within a ±3 bin range. The mean of these range-sidelobes is zero.
The average of the variance over non-zero-lag values of the unfiltered sequences is 16.5
44
Doppler Processed Return using Random Pulse-Codes
110 r-
105
-
-...-...-.
100 - --
Clutter
95
F
-
Range
a
4)
-/
90
-
-
- -'-
85
80
75
70
1
2
3
4
/
I
5
6
7
8
9
/
/
10
Doppler
Figure 4-1: Variable Pulse-Code Radar Doppler Return using Random Codes
Doppler Processed Return - +/-3 MF Sidelobe Codes
110 r
105 F
100
-
-
l
-.
..
.
-
-
-
-
-
I -..
....
Clutter95
F-
-v
4)
~0
.. -..
-.
90 F
Range
85
- >
/
'W
80
75
ru 1
2
3
4
5
6
7
8
9
10
Doppler
Figure 4-2: Variable Pulse-Code Radar Doppler Return using ±3 Codes
45
using Equation 3.9. The variance for the censored data is seen to alternate between 4.75
and 2.6 with an average over the non-zero-lag values of 3.43. This is close to a variance
of 3.0 which would be arrived at by assuming uniform distribution of the non-zero-lag value
range-sidelobes between ±3. Based on the exact analysis, there is a 10log(
dB improvement which matches the empirical result.
=
6)
6.8219
Although 6.8 dB is a significant
improvement, it is not nearly enough to even begin to recover the target SNR.
Sidelobe Variance versus Lag
35
Var Uncensored
....
........................................
V a r + /- 3 ~ x
10)
10
0
5
10
15
20
25
30
Lag Value
Figure 4-3: Mean and Variance of Random and ±3 32-bit PN Codes
4.2
Pulse Compression Waveforms
We have verified that selecting codes with a limited matched filter output sidelobe
improves our SNR. Lower sidelobe
level
levels will result in lower sidelobe variance and therefore,
less false Doppler spreading effect. If we develop this idea to the extreme and tighten the
criteria to specify no sidelobes, we are left with a function that approaches a dirac delta (6o)
function as N
-+
inf. Again, using Equation 3.9 and Equation 3.17, we see that if there is
zero variance in the non-zero-lag values of the ME output, then there is zero contribution
to the Doppler spectrum.
Clutter sidelobe strength at the matched filter output is dependent on the
46
level of the
non-zero-lag values as we saw in Equation 3.9. Its contribution to the Doppler spectrum is
shown in Equation 3.17.
From Section 2.4.1 we know that the output time response of the ideal pulse compressor
is also a dirac delta function. Therefore, a pulse compression filter should be ideal for
recovering variable pulse-code Doppler performance loss. Figures 4-4 and 4-5 show this to
be only partially true. In fact, pulse compression often fails when using randomly selected
codes or even the ±3 sidelobe set of codes.
Doppler Processed Return - Variable Pulse-Codes, Pulse Compression
80>
6040,.-
20-20
-40
15
8
10
X10
10
56
2
Range (m)
0
0
Doppler
Figure 4-4: Variable Pulse-Code Doppler Radar Showing Partial Effectiveness
The reason why is that the pulse compression filter problem is ill-posed since there may
be zeros in the input spectrum. Thus, the reciprocal spectrum of the 32-bit pulse-codes will
have problems: it may not be fully defined and a pulse compression filter generated from it
could be numerically unstable.
If we examine the frequency spectrum of each pulse-code, we see that failure to generate
an output is caused by inability to form a valid pulse compression filter. Equation 2.6
defines the pulse compression filter spectrum as the reciprocal of the input spectrum. If the
input spectrum contains any zero values, the pulse compression filter will have values of
and therefore not be realizable.
47
oc
MTI Filtered Return - Variable Pulse-Codes, Pulse Compression
60
40
--
20
10
x 10
6
4
105
4
2
Range (m)
0
0
Doppler
Figure 4-5: Variable Pulse-Code MTI Radar Showing Partial Effectiveness
In cases where a pulse compression filter may be formed but the output less than ideal
as seen in Figures 4-4 and 4-5, we see that the clutter floor has risen and we can hypothesize
that the performance degradation is due to a numerically unstable filter or one with a poor
transient response.
4.2.1
Pulse Compression Filters
To guarantee the formation of a valid pulse compression filter we must create a subset of
codes whose frequency spectrums have no zero-values. The ±3 subset of codes were used
as a starting point.
We can hypothesize that the ±3 subset of codes will create better pulse compression
filters than codes selected at random from the pool of all possible 32-bit codes. The ±3
codes form better matched filters and the MF output shares greater similarity with the
time response of the pulse compression filter output. It is reasonable to believe that a pulse
compression filter formed by these codes will result in less SNR loss when compared to the
optimal matched filter SNR.
The 3,376 codes in the ±3 subset of 32-bit codes are filtered to ensure formation of
48
a valid pulse compression filter. Two quick tests are first performed. Codes whose values
summed to zero have a DC value of zero and can be discarded since the spectrum would be
non-invertible. Codes that, when multiplied by the sequence defined by - 1 N, sum to zeros
also have a zero value at
f,
= N/2 and can be discarded. However, these two criteria do
not account for zeros anywhere else in the spectrum so further filtering is required. At this
point, there are 3,072 codes remaining.
Since each code is a finite sequence, the discrete fourier transform (DFT) is continuous
in frequency domain. Thus, testing the frequency transform for zero values is incomplete
since there could exist zeros that were not sampled. To thoroughly filter the codes, we must
find and factor the Z-transform of each code to check for zeros in the frequency spectrum.
Any root on the unit circle will indicate a zero in the frequency spectrum.
Now that we have a set of codes able to form valid pulse compression filters, we would
like to further filter the set for codes which have a good transient response to form a cleaner
filter. A heuristic approach may be taken to select codes with a better transient response.
Examining each code sequence, we notice that for some codes, the impulse response of the
resulting pulse-compression filter are oscillatory or have unsatisfactorily long settling times.
An algorithm was devised to select for codes with less oscillation. The impulse response
was time shifted to center the peak.
The resulting function was scaled and treated as
a probability density function. The standard deviation was computed and any code not
within a threshold value of 50 time samples was discarded. Figure 4-6 shows a discarded
code with a high level of oscillation and one whose signal energy had a standard deviation
< 50. The result was a subset of 568 codes that formed clean pulse compression filters.
Time Response of Reciprocal Spectrum
Time Response of Reciprocal Spectrum
0.06
0.07
0.05
0.04
-...
.....
........
...
......
........
....
..
....
....
..
......
..... .....
- ..
....
....
..
...
... ..
....
..
...
.
0.03
-... ..
.. ...
...-...
...
....
....
..
....
...
...
...
.......
...
...
...
...
...
....
...
..
....
..
......
0.02
0.01
0 .04
- -
0.6
0.03
.......
-
0.02
---
0.01
0
200
400
600
Sample Time
800
1000
1200
-
.......- ........
-
- -
-
--
-
...........................
.
.....
.......
-
-
-
........ ........
..... .....
-
0
-
-
200
-
-
400
-
600
Sample Time
800
1000
1200
Figure 4-6: Time Response of Reciprocal Spectrum
Another approach is to return to the Z-transform and examine the proximity of the
49
roots of each code to the unit circle. For our binary phase-modulated sequences, Jury's
test [5] tells us that if there are roots outside the unit circle, the filter will be unstable. This
was found to be true for every sequence. We also found that for every code sequence, there
exist roots inside the unit circle as well. Let us consider the fact that zeros on the unit
circle result in an invalid pulse compression filter since the reciprocal of any zeros in the
frequency spectrum are undefined. It would then follow that as you move away from the
unit circle and thus away from the zero value frequency, a better pulse compression filter
will result.
Figure 4-7 shows the reciprocal filter time response of each code in our filtered code
subset versus the distance of the nearest zero to the inside of the unit circle. Figure 4-8
shows the reciprocal filter time response versus the distance of the nearest zero to the outside
of the unit circle. Darker bands and contrast changes along the vertical axis indicate greater
oscillation and worse pulse compression filters. From this it would appear that codes with
zeros further away outside of the unit circle form better pulse compression filters.
Reciprocal Filter Time Response
0.05
120
100
0.04
80
0.03
60
0.02
40
20
0.01
0
0.015
0
0.0125
0.01
0.0075
0.005
0.0025
Distance Inside UC
Figure 4-7: Time Response of Reciprocal Spectrum - Nearest Root Inside Unit Circle
50
Reciprocal Filter Time Response
0.05
120100
-0.04
0.03
60
0.02
40
20
0
0.0025
0.005
0.0075
0.01
0.0125
&-J
0.015
0
Distance Outside UC
Figure 4-8: Time Response of Reciprocal Spectrum - Nearest Root Outside Unit Circle
4.3
Doppler and MTI Performance
The radar simulation using variable pulse-codes, the filtered 568 code subset, and pulse
compression filters successfully and consistently performed Doppler and MTI processing.
The strategy of minimizing filter output sidelobes to achieve phase alignment was successful
as seen in Figures 4-9 and 4-10.
Doppler and MTI processing are minimally affected by using variable pulse-codes when
a pulse compression filter is used for signal detection. There is negligible degradation in
the Doppler response of PC filter outputs within a coherent processing interval (CPI) when
compared to using constant pulse-codes.
However, this does not address the SNR loss
associated with the pulse compression filter which is discussed in the following section.
Figure 4-11 presents the profile of the MTI filtered spectrum of a constant pulse-code radar
using a PC filter. Figure 4-12 presents the profile of a variable pulse-code radar using a
PC filter. Notice the PC filter ring-up and ring-down and that there is no apparent loss in
using variable pulse-codes when using pulse compression.
For the ideal case, there are no sidelobes in the time response output of the PC filter
or in the Doppler spectrum regardless of the pulse-code selected, given that the pulse-code
is able to form a valid PC filter. However, the ideal case is a Jo which is not physically
51
Doppler Processed Return - +/-3 Variable Pulse-Codes, Pulse Compression
80,
60,
40
20
CL
0O
-20,
-40
3J
-60
15
10
510
x 10
6
4
0
0
Range (m)
Doppler
Figure 4-9: Doppler Processing with ±3 Variable Pulse-Codes, Pulse Compression
MTI Filtered Return - =/-3 Variable Pulse-Codes, Pulse Compression
60
401
20
0,
-20
xl0
10
-
6
x10
3
Range (m)
0
7
8
4
1
Doppler
Figure 4-10: MTI Processing with ±3 Variable Pulse-Codes, Pulse Compression
52
MTI Filtered Return - Constant Pulse-Code, Pulse Compression
50
45
......- ...... .....
-... ........
- -
40
--
35
-30
<- Target
- 25
-I
..........
S
~20
-
-
Doppler
S..
15
10
5
0
0
-
5
10
15
Range (m)
x 10
Figure 4-11: Pulse Compression and MTI Filtered Spectrum Profile - Constant Pulse-Code
MTI Filtered Return - Variable Pulse-Code, Pulse Compression
50
-~.-.
-
-- - - -.
....
.-.-.-. -----
45
40
<-
Filter Ring-up/down
35
-30
<- Target
25
20
Doppler
15
0
5
10
Range (m)
15
x 10
Figure 4-12: Pulse Compression and MTI Filtered Spectrum Profile - Variable Pulse-Codes
53
realizable. Implementation in an actual system will result in some small performance loss
dependent on the quality of the PC filter output.
4.3.1
SNR Loss
The pulse compression filter performs equivalently with variable or constant pulse-code
radar system. However, its primary disadvantage is a SNR loss when compared to
the
optimum SNR of the matched filter output. Figure 4-13 shows the profile of the Doppler
processed spectrum of a constant pulse-code radar using matched filtering.
Figure 4-14
shows the profile of the Doppler processed spectrum of a constant pulse-code radar using
pulse compression. Looking at the target in Doppler bin ten, notice the slight difference in
SNR between the two Figures. This will be empirically quantified in Section 5.3.1.
Doppler Processed Return using Matched Filtering Profile
100-
80
-
-.-..--. -.
Clutter-- --
...
..
70 60
70-
...- -
--
-
Target
Range
30-
20
:
10--
1
2
3
4
6
5
7
8
9
10
Doppler
Figure 4-13: Matched Filter and MTI Filtered Spectrum Profile
54
Doppler Processed Return using Pulse Compression Profile
50
-
40
CO
Clutter-.-.-.
--
.....
-
30
20
/
Range
*10
0
Target -
-
-
-
--
..
-.
-10
-20
1
2
3
4
5
6
7
8
9
10
Doppler
Figure 4-14: Pulse Compression and MTI Filtered Spectrum Profile
55
Chapter 5
Adaptive Digital Equalization
Filtering
In Chapter 4 we showed that a variable pulse-code radar was able to recover the ability
to perform Doppler and MTI processing performance by using a pulse compression filter
in place of the matched filter. We found this to be the result of the near-zero sidelobe
level of the pulse compression filter output. With no sidelobe energy between PRIs, phase
alignment was achieved and the sidelobes did not significantly contribute to the Doppler
spectrum. However, the pulse compression filter lacks the maximum SNR ratio criteria of
the matched filter.
It is desirable to maintain the maximum SNR of the matched filter with the ability to
perform Doppler and MTI processing of the pulse compression filter. This would require
either realigning or removing the range sidelobes of the matched filter output before Doppler
processing. An adaptive digital equalization filter may be added to the matched filtering
in an attempt to force phase alignment. If the signal degradation of the equalization filter
is less than that of the pulse compression filter, then a performance improvement will be
achieved.
5.1
Filter Implementation
The adaptive equalization filters used in this thesis are finite-duration impulse response
(FIR) filters. The equalization filter attempts to minimize the total squared error between
two inputs and adapt to varying input sequences. The problem presented by matched filter
56
outputs produced by non-similar input PN code sequences is non-standard as depicted
in Figure 5.1.
Each unique PN code requires a unique matched filter.
Thus, we have
two distinctly different inputs, xo(n) and xi(n), applied to two distinctly different system
responses, ho(n)and hi(n).
X(o(ng
-h(n)
y. (n)
-
- -- + h (n)
(n)
g, (n)
Figure 5-1: Adaptive Equalization Filter System
5.1.1
Time Domain Implementation
The traditional time domain FIR adaptive equalization filtering technique [2] was tested
and compared with the frequency domain implementation discussed in the next section.
Both produced equivalent results.
5.1.2
Frequency Domain Implementation
For the radar system simulation developed for this thesis, the equalization filtering was
performed digitally in the frequency domain. As we saw in Figure 2-13, shaping the frequency domain spectrum of the output signal will affect its time domain impulse response.
Therefore, we can equalize the time domain matched filter output of multiple distinct input
pulses by forcing their output spectrums to match.
5.2
Equalization Strategies
To recover Doppler and MTI performance when using matched filters we can equalize the
matched filter output to an ideal pulse compression filter output spectrum. We know that
the pulse compression filter can successfully be used with a variable pulse-code radar. Thus,
the output of the equalized signal will contain no range sidelobes in the ideal case.
57
An equalization filter is formed for each pulse in the frequency domain by taking the
reciprocal of the matched filter output spectrum. As with the pulse compression filter, the
output of each filter is a dirac delta function when the sequence from which it was derived
is the input. The absence of sidelobes would result in zero sidelobe variance and therefore
no false Doppler.
The equalization filter is then multiplied by the spectrum of the matched filtered return
signal for its PRI. This is equivalent to clocking the signal through an FIR equalization filter
in the time domain. With the exception of filter ring-up and ring-down at the range fringes,
the result is a clean Doppler spectrum. Figure 5-2 shows the Doppler spectrum of a return
that has been matched filtered and equalized to a flat frequency spectrum. Application of
the MTI filter will not be affected by equalization. Figure 5-3 shows the MTI filter output.
Equalized Doppler Processed Return
80
40-
-20
-40
15
100
8
10
10
4
2
Range (m)
0
0
Doppler
Figure 5-2: Variable Pulse-Code Doppler Radar with Flat Spectrum Equalization Filtering
The performance of using a pulse compression filter can be compared with that of the
combination equalization and matched filter. From Figure 5-4, we observe that despite
the maximum SNR of the matched filter output, losses through the equalization filter have
brought the performance of the system down to the same level as pulse compression by
itself. This result is not surprising as the equalization filter was designed to meet the same
58
Equalized MTI Processed Retum
8060,
40,
'
200
-20
-40
-60,
15
8
10
6
x 10
5
4
2
0
Ranne (m)
0
Doppler
Figure 5-3: Variable Pulse-Code MTI Radar with Flat Spectrum Equalization Filtering
criteria as the pulse compression filter.
MTI Filered Return
using Piuse Comeression Filfting
0
60-
MTI Processed Retum
using Equization to a Flat Spectrun
60
40
-Targe
-20
0
05
Range (m)
-1 -200
x 10
10
F"
510
Range (m)
15
Figure 5-4: Pulse Compression versus Flat Spectrum Equalization
We can attempt to improve upon this performance by returning to the concept of phase
alignment across pulses. As in the case of the traditional pulsed Doppler radar, zero matched
filter output sidelobe is not a requirement for Doppler processing. However, to successfully
perform Doppler processing, zero variation and phase alignment, across PRIs in the sidelobes
of the matched filter output is a requirement.
59
Therefore, it would follow that if the each equalization filter were formed such that its
output was the same as some reference matched filter output, then both phase alignment
and minimum sidelobe level variation could be achieved.
Figure 5-5 shows the successful result of equalizing the spectrum of all matched filter
outputs to the spectrum of the first matched filter output. The equalization filter for the
first pulse is Go
=
1 and the remaining equalization filters were formed by
Gn(f) == H
Hn(f)'
,(f)
(5.1)
where n is the PRI number.
MTI Processed Return using 1st Pulse Spectrum Equalization
100
80
Target
60S 40
-20-40
-
15-
10--8
6
4
x 10
5
4
2
Range (m)
0
0
Figure 5-5: Variable Pulse-Code MTI Radar with 1'
5.3
Doppler
Pulse Equalization Filtering
Doppler and MTI Performance
The adaptive digital equalization filtering was successful in mitigating the Doppler spread
effect created by using variable pulse-codes. The flat spectrum equalization algorithm uses
the same strategy as the pulse compression filter and has the same performance. Minimizing
the sidelobe levels of the matched filter output achieves phase alignment within a CPI and
60
minimizes sidelobe level variation, the cause of the Doppler spreading effect derived in
Section 3.1.
Phase alignment is also achieved with the
1"
pulse spectrum equalization
algorithm.
5.3.1
SNR Loss
The first-pulse equalization algorithm in Equation 5.1 will result in less SNR loss than
equalizing to a flat spectrum. We can verify this result empirically. Since an equalization
filter is a random process, theoretical computation of SNR loss is impractical given that any
code may follow any other code when the codes are randomly selected. Thus, a simulation
was created to compute the SNR of both equalization algorithms at the filter output. The
SNR of matched filtering alone and pulse compression will also be computed for comparison
using our filtered set of 568 codes whose signal energy had a standard deviation < 50.
Although the gain of the target in the Doppler spectrum will remain unchanged as we
discovered in Section 3.1.1, the noise floor will vary with the filter technique used, thus
changing the SNR. The results are shown in Table 5.3.1.
Table 5.1: Comparison of SNR for different filtering methods.
Filter
Method
SNR Loss (dB)
Matched
Filtering
0
Pulse
Compression
-2.43
Flat Spectrum
Equalization
-2.43
1 st Pulse
Equalization
-2.37
Notice that the SNR for equalizing to a flat spectrum and pulse compression filtering are
the same. This is expected since both filters are designing to the same criteria. We also
see that equalizing to the spectrum of the first matched filtered pulse offers some improvement in performance. However, this is not considered a significant improvement over pulse
compression.
61
Chapter 6
Anti-Jamming Performance
The final test for the variable pulse-code radar is its effectiveness in a hostile jamming
environment. Jamming was created as described in Section 2.3.3. Figure 6-1 shows the
MTI filter output of a constant pulse-code radar. The jamming environment contains 15
false targets, each with a different position and velocity. Figure 6-2 shows the MTI filter
output of a variable pulse-code radar. Notice all of the false targets have been rejected to
below the noise level and the true target revealed.
MTI Filtered Return with Repeat-Back Jamming
80
40
240>
15-
8
----
10
6
4
X10
5
4
2
Range (m)
0
0
Doppler
Figure 6-1: Constant Pulse-Code MTI Radar in Repeat-Back Jamming Environment
62
Equalized MTI Processed Return with Repeat-Back Jamming and Variable Pulse-Codes
10080 60 4)
ft!
40
20
0-20,
-40
15
8
10
6
4
X 10
5
4
2
Range (m)
0
0
Doppler
Figure 6-2: Variable Pulse-Code MTI Radar in Repeat-Back Jamming Environment
63
Chapter 7
Conclusion
In this thesis, a new modification to the Pulsed Doppler and Moving Target Indication radar
systems was explored. The variable pulse-code radar system was proposed in response to
a potential vulnerability to repeat-back jamming in current systems.
This new system
varies the codes within a coherent processing intervals by changing the PN code sequence
transmitted with each PRI. This is highly effective in resisting some types of repeat-back
jamming. However, the use of variable pulse-codes results in a significant performance loss
in the ability to Doppler process or apply an MTI filter to the return.
The performance loss was investigated and it was discovered that while the zero-lag
peak values of the return signal were unaffected by using variable pulse-codes, there was a
significant amount of clutter sidelobe interference during matched filtering. This interference
disrupted amplitude and phase alignment across PRIs which resulted in a degradation of
the integrated signal-to-clutter ratio by a factor of 1
where N is the code length.
Several options to mitigate this performance loss were explored. Code selection of PN
codes able to form matched filters with minimal sidelobe variation improved performance
by approximately 7 dB. Pulse compression was considered as an alternative to matched
filtering. The pulse compression filter was successful due to the absence of sidelobe energy
in the filtered output. However, the pulse compression filter suffers from a 2.5 dB SNR
loss when compared to the matched filter. Further filtering of codes was performed by
examining time responses of the reciprocal spectrum of code sequences to create a subset
of 32-bit codes which optimized the pulse compression filter.
The maximum SNR matched filter was revisited with the addition of adaptive digital
64
equalization filters designed to recover pulsed Doppler and MTI performance based on
the lessons learned previously. A flat spectrum equalization filter, similar in function to
the pulse compression filter, was tested and found to be successful in recovering some
Doppler performance.
To attempt to combine the advantages of the matched filter and
pulse compression filter, a 11 pulse spectrum equalization filter was designed to maximize
Doppler performance using variable pulse-codes. This too was found to be successful.
Finally, the variable pulse-code radar was placed in a hostile jamming environment to
test the effectiveness of these processing techniques. A repeat-back jammer was created
which introduced false targets using captured pulse-codes from each previous PRI. The
variable pulse-code radar successfully mitigated the effects of the jamming and rejected all
false targets. There exists much room for future work to perform a more rigorous study of
this radar system. The environmental factors can be modelled in greater detail and a more
complex jamming environment created to test the robustness of this system. The variable
pulse-code radar has met its performance goals in this thesis and shows promise for future
development.
65
Bibliography
[1] Charles E. Cook and Marvin Bernfeld. Radar Signals. Artech House, Boston, 1993.
[2] Simon Haykin. Adaptive Filter Theory. Prentice-Hall, Inc., New Jersey, third edition,
1996.
[3] Leon W. Couch II. Digital and Analog Communications Systems. Prentice-Hall, Inc.,
New Jersey, 2001.
[4] Michael A. Koerber. Personnel Correspondance, May 2002.
[5] Benjamin C. Kuo. Digital Control Systems. Hold, Rinehart, and Winston, Inc., New
York, 1980.
[6] Hamish Meikle. Modern Radar Systems. Artech House, Boston, 2001.
[7] Alan V. Oppenheim. Discrete-Time Signal Processing. Prentice-Hall, Inc., New Jersey,
1989.
[8] Athanasios Papoulis.
Probability, Random Variables, and Stochastic Processes.
McGraw-Hill, Boston, fourth edition, 2002.
[9] John G. Proakis. CommunicationSystems Engineering.Prentice-Hall, Inc., New Jersey,
second edition, 2002.
[10] Michael B. Szymanski Robert N. Lothes and Richard G. Wiley. Radar Vulnerability to
Jamming. Prentice Hall, New Jersey, 1996.
[11] Curtis D. Schleher. MTI and Pulsed Doppler Radar. Artech House, Boston, 1991.
[12] Merrill I. Skolnik. Radar Handbook. McGraw-Hill, New York, second edition, 1990.
66
[13] Merrill I. Skolnik.
Introduction to Radar Systems.
McGraw-Hill, New York, third
edition, 2001.
[14] George W. Stimson. Introduction to Airborne Radar. SciTech Publishing, New Jersey,
second edition, 1998.
67