Document 10951953
advertisement

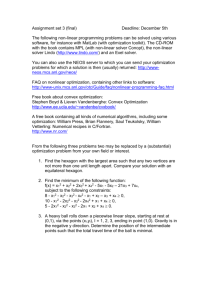
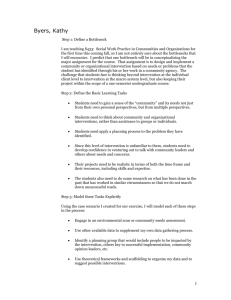
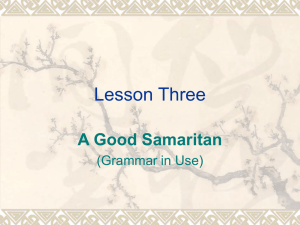
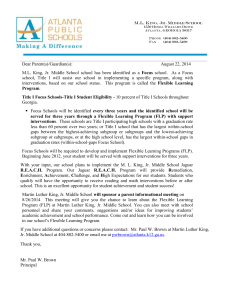
Hindawi Publishing Corporation Mathematical Problems in Engineering Volume 2011, Article ID 763429, 47 pages doi:10.1155/2011/763429 Research Article Rayleigh Waves in Generalized Magneto-Thermo-Viscoelastic Granular Medium under the Influence of Rotation, Gravity Field, and Initial Stress A. M. Abd-Alla,1 S. M. Abo-Dahab,1, 2 and F. S. Bayones3 1 Mathematics Department, Faculty of Science, Taif University, Taif 21974, Saudi Arabia Mathematics Department, Faculty of Science, South Valley University, Qena 83523, Egypt 3 Mathematics Department, Faculty of Science, Umm Al-Qura University, P.O. Box 10109, Makkah 13401, Saudi Arabia 2 Correspondence should be addressed to S. M. Abo-Dahab, sdahb@yahoo.com Received 4 December 2010; Revised 14 January 2011; Accepted 25 February 2011 Academic Editor: Ezzat G. Bakhoum Copyright q 2011 A. M. Abd-Alla et al. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. The surface waves propagation in generalized magneto-thermo-viscoelastic granular medium subjected to continuous boundary conditions has been investigated. In addition, it is also subjected to thermal boundary conditions. The solution of the more general equations are obtained for thermoelastic coupling. The frequency equation of Rayleigh waves is obtained in the form of a determinant containing a term involving the coefficient of friction of a granular media which determines Rayleigh waves velocity as a real part and the attenuation coefficient as an imaginary part, and the effects of rotation, magnetic field, initial stress, viscosity, and gravity field on Rayleigh waves velocity and attenuation coefficient of surface waves have been studied in detail. Dispersion curves are computed numerically for a specific model and presented graphically. Some special cases have also been deduced. The results indicate that the effect of rotation, magnetic field, initial stress, and gravity field is very pronounced. 1. Introduction The dynamical problem in granular media of generalized magneto-thermoelastic waves has been studied in recent times, necessitated by its possible applications in soil mechanics, earthquake science, geophysics, mining engineering, and plasma physics, and so forth. The granular medium under consideration is a discontinuous one and is composed of numerous large or small grains. Unlike a continuous body each element or grain cannot only translate 2 Mathematical Problems in Engineering but also rotate about its center of gravity. This motion is the characteristic of the medium and has an important effect upon the equations of motion to produce internal friction. It was assumed that the medium contains so many grains that they will never be separated from each other during the deformation and that each grain has perfect thermoelasticity. The effect of the granular media on dynamics was pointed out by Oshima 1. The dynamical problem of a generalized thermoelastic granular infinite cylinder under initial stress has been illustrated by El-Naggar 2. Rayleigh wave propagation of thermoelasticity or generalized thermoelasticity was pointed out by Dawan and Chakraporty 3. Rayleigh waves in a magnetoelastic material under the influence of initial stress and a gravity field were discussed by Abd-Alla et al. 4 and El-Naggar et al. 5. Rayleigh waves in a thermoelastic granular medium under initial stress on the propagation of waves in granular medium are discussed by Ahmed 6. Abd-Alla and Ahmed 7 discussed the problem of Rayleigh wave propagation in an orthotropic medium under gravity and initial stress. Magneto-thermoelastic problem in rotating nonhomogeneous orthotropic hollow cylinder under the hyperbolic heat conduction model is discussed by Abd-Alla and Mahmoud 8. Wave propagation in a generalized thermoelastic solid cylinder of arbitrary cross-section is discussed by Venkatesan and Ponnusamy 9. Some problems discussed the effect of rotation of different materials. Thermoelastic wave propagation in a rotating elastic medium without energy dissipation was studied by Roychoudhuri and Bandyopadhyay 10. Sharma and Grover 11 studied the body wave propagation in rotating thermoelastic media. Thermal stresses in a rotating nonhomogeneous orthotropic hollow cylinder were discussed by El-Naggar et al. 12. Abd-El-Salam et al. 13 investigated the numerical solution of magneto-thermoelastic problem nonhomogeneous isotropic material. In this paper, the effect of magnetic field, rotation, thermal relaxation time, gravity field, viscosity, and initial stress on propagation of Rayleigh waves in a thermoelastic granular medium is discussed. General solution is obtained by using Lame’s potential. The frequency equation of Rayleigh waves is obtained in the form of a determinant. Some special cases have also been deduced. Dispersion curves are computed numerically for a specific model and presented graphically. The results indicate that the effect of rotation, magnetic field, initial stress, and gravity field are very pronounced. 2. Formulation of the Problem Let us consider a system of orthogonal Cartesian axes, Oxyz, with the interface and the free surface of the granular layer resting on the granular half space of different materials being the planes z K and z 0, respectively. The origin O is any point on the free surface, the z-axis is positive along the direction towards the exterior of the half space, and the xaxis is positive along the direction of Rayleigh waves propagation. Both media are under −−→ initial compression stress P along the x-direction and the primary magnetic field H0 acting on y-axis, as well as the gravity field and incremental thermal stresses, as shown in Figure 1. The state of deformation in the granular medium is described by the displacement vector → − → − Uu, o, w of the center of gravity of a grain and the rotation vector ξ ξ, η, ζ of the grain about its center of gravity. The elastic medium is rotating uniformly with an angular velocity Ω Ωn, where n is a unit vector representing the direction of the axis of rotation. The displacement equation of motion in the rotating frame has two additional terms, Ω × Ω × u Mathematical Problems in Engineering 3 O −−→ H0 y z=0 Granular layer P Granular half space x z=K Ω P g z Figure 1: Depiction of the problem. −• → − → is the centripetal acceleration due to time varying motion only, and 2Ω × u is the Coriolis acceleration, and Ω 0, Ω, 0. The electromagnetic field is governed by Maxwell equations, under the consideration that the medium is a perfect electric conductor taking into account the absence of the displacement current SI see the work of Mukhopadhyay 14: → − → − J curl h, → − → − ∂h −μe curl E, ∂t → − div h 0, 2.1 → − div E 0, → → − → ∂− u − E −μe ×H , ∂t where → − −−→ − h curl → u × H0 , − − → −−→ → H H0 h, −−→ H0 0, H0 , 0, 2.2 → − → − where h is the perturbed magnetic field over the primary magnetic field vector, E is the → − −−→ electric intensity, J is the electric current density, μe is the magnetic permeability, H0 is the − constant primary magnetic field vector, and → u is the displacement vector. The stress and stress couple may be taken to be nonsymmetric, that is, τij / τji , . The stress tensor τ can be expressed as the sum of symmetric and antisymmetric M Mij / ji ij tensors τij σij σij , 2.3 4 Mathematical Problems in Engineering where σij 1 τij τji , 2 σ ij 1 τij − τji . 2 2.4 The symmetric tensor σij σji is related to the symmetric strain tensor 1 eij eji 2 ∂ui ∂uj ∂xj ∂xi 2.5 . The antisymmetric stress σij are given by σ23 −F ∂ξ , ∂t σ31 −F ∂η , ∂t σ12 −F ∂ζ , ∂t σ11 σ22 σ33 0, 2.6 where F is the coefficient of friction between the individual grains. The stress couple Mij is given by Mij Mνij , 2.7 where, M is the third elastic constant, M11 , M13 , M33 , and so forth, are the components of the resultant acting on a surface. The non-symmetric strain tensor νij is defined as ν11 ν12 ∂ξ , ∂x ν31 ∂ ω2 η , ∂x ∂ξ , ∂z ν33 ν32 ∂ζ , ∂z ν21 ν22 ν23 0, ∂ ω2 η , ∂z ν13 ∂ζ , ∂x 2.8 where ω2 1/2∂u/∂z − ∂w/∂x. The dynamic equation of motion, if the magnetic field and rotation are added, can be written as 15 τji,j Fi ρ •• ui → → • − → − → − → − − , Ω× Ω× u 2Ω× u i i, j 1, 2, 3. 2.9 i The heat conduction equation is given by 16 K∇2 T ρs ∂ ∂ ∂ ∂ − 1 τ2 T γ T0 1 τ2 δ ∇ ·→ u, ∂t ∂t ∂t ∂t 2.10 where ρ is density of the material, K is thermal conductivity, s is specific heat of the material per unit mass, τ1 , τ2 are thermal relaxation parameter, αt is coefficient of linear thermal expansion, λ and μ are Lame’s elastic constants, θ is the absolute temperature, γ αt 3λ 2μ, Mathematical Problems in Engineering 5 T0 is reference temperature solid, T is temperature difference θ − T0 , τ0 is the mechanical relaxation time due to the viscosity, and τm 1 τ0 ∂/∂t. The components of stress in generalized thermoelastic medium are given by ∂u ∂w ∂ τm λ P − γ 1 τ1 T, σ11 τm λ 2μ p ∂x ∂z ∂t ∂w ∂ ∂u σ33 τm λ τm λ 2μ − γ 1 τ1 T, ∂x ∂z ∂t ∂u ∂w σ13 τm μ . ∂z ∂x 2.11 If we neglect the thermal relaxation time, then 2.11 tends to Nowacki 17 and Biot 18. The Maxwell’s electro-magnetic stress tensor τ ij is given by τ ij μe Hi hj Hj hi − Hk · hk δij , i, j 1, 2, 3, 2.12 which takes the form τ 11 −μe H02 ∇2 φ, τ 13 τ 23 0, τ 33 μe H02 ∇2 φ, ∇2 φ ∂u ∂w . ∂x ∂z 2.13 The dynamic equations of motion are ∂τ11 ∂τ31 P ∂ω2 ∂w ∂2 u ∂w 2 − ρg Fx ρ −Ω u , 2Ω ∂x ∂z 2 ∂z ∂x ∂t ∂t2 ∂τ12 ∂τ32 Fy 0, ∂x ∂z ∂τ13 ∂τ33 P ∂ω2 ∂w ∂2 w ∂u 2 ρg Fz ρ −Ω w , − 2Ω ∂x ∂z 2 ∂x ∂x ∂t ∂t2 2.14 where g is the Earth’s gravity and F −μe H02 ∇2 φ, 0, μe H02 ∇2 φ , τ23 − τ32 ∂M11 ∂M31 0, ∂x ∂z τ31 − τ13 ∂M12 ∂M32 0, ∂x ∂z τ12 − τ21 ∂M13 ∂M33 0. ∂x ∂z 2.15 2.16 6 Mathematical Problems in Engineering From 2.3–2.8 and 2.11, we have τ11 ∂u ∂w ∂ τm λ P − γ 1 τ1 τm λ 2μ p T, ∂x ∂z ∂t τ33 τm λ τ13 ∂w ∂u ∂ τm λ 2μ − γ 1 τ1 T, ∂x ∂z ∂t ∂η ∂u ∂w F , τm μ ∂z ∂x ∂t τ12 −F ∂ζ , ∂t τ23 −F ∂ξ , ∂t M11 M ∂ξ , ∂x M12 M ∂ ω2 η , ∂x 2.17 M31 M ∂ξ , ∂z M33 M M32 M ∂ζ , ∂z ∂ ω2 η , ∂z M21 M22 M23 0, M13 M ∂ζ . ∂x Substituting 2.17 into 2.14 and 2.16 tends to ∂2 u ∂2 w ∂ ∂T ∂2 u ∂2 w τm λ 2μ P − γ 1 τ1 τm μ τm λ P ∂x ∂z ∂t ∂x ∂x2 ∂z2 ∂x ∂z P 2 ∂2 w ∂2 u − ∂z2 ∂x ∂z ∂2 η ∂w F μe H02 − ρg ∂x ∂z ∂t ∂2 w ∂2 u ∂x2 ∂x ∂z ∂w ∂2 u 2 −Ω u , 2Ω ρ ∂t ∂t2 2.18 then 2 ∂2 u P P ∂2 u 2 ∂ w τm λ 2μ P μe H02 λ μ μ τ τ H μ m e m 0 2 ∂x ∂z 2 ∂z2 ∂x2 ∂2 η ∂w ∂2 u ∂ ∂T ∂w 2 − ρg F ρ −Ω u . − γ 1 τ1 2Ω ∂t ∂x ∂x ∂z ∂t ∂t ∂t2 2.19 Mathematical Problems in Engineering 7 Also, τm μ ∂ ∂t ∂ζ ∂ξ − ∂x ∂z 0, 2.20 ∂2 w ∂2 η ∂2 w ∂2 u ∂2 u ∂ ∂T τm λ τm λ 2μ − γ 1 τ1 −F ∂x ∂z ∂x2 ∂x ∂t ∂x ∂z ∂t ∂z ∂z2 ∂u ∂2 u ∂2 w P ∂2 u ∂2 w ∂2 w ∂u 2 2 ρg ρ − μe H0 −Ω w , − 2Ω 2 ∂x ∂z ∂x2 ∂x ∂x ∂z ∂z2 ∂t ∂t2 2.21 then 2 2 P ∂u P ∂2 w 2 ∂ w τm λ μ μe H02 τm μ − τ H λ 2μ μ m e 0 2 ∂x ∂z 2 ∂x2 ∂z2 ∂2 η ∂u ∂2 w ∂u ∂ ∂T ρg −F ρ − Ω2 w , − γ 1 τ1 − 2Ω ∂t ∂z ∂x ∂x ∂t ∂t ∂t2 2.22 and, from 2.16, we have ∇2 ξ − s2 ∂ξ 0, ∂t ∂η ∇2 ω2 η − s2 0, ∂t ∇2 ζ − s2 2.23 2.24 ∂ζ 0, ∂t 2.25 2F . M 2.26 where s2 3. Solution of the Problem − By Helmholtz’s theorem 19, the displacement vector → u can be written in the displacement potentials φ and ψ form, as → − − u grad φ curl → ψ, → − ψ 0, ψ, 0 , 3.1 which reduces to u ∂φ ∂ψ − , ∂x ∂z w ∂φ ∂ψ . ∂z ∂x 3.2 8 Mathematical Problems in Engineering Substituting 3.2 into 2.19, 2.22, and 2.24, the wave equations tend to α2 ∇2 φ − ∂ψ ∂2 φ γ ∂ψ ∂ 1 τ1 T −g 2 2Ω − Ω2 φ, ρ ∂t ∂x ∂t ∂t β 2 ∇2 ψ − s1 ∂η ∂φ ∂2 ψ ∂φ g 2 − 2Ω − Ω2 ψ, ∂t ∂x ∂t ∂t ∇2 η − s2 ∂η − ∇4 ψ 0, ∂t 3.3 3.4 3.5 where s1 F , ρ α2 τm λ 2μ P μe H02 , ρ β2 2τm μ − P . 2ρ 3.6 Substituting 3.2 into 2.10, we obtain K∇2 T ρs ∂ ∂ ∂ ∂ 1 τ2 T γ T0 1 τ2 δ ∇2 φ. ∂t ∂t ∂t ∂t 3.7 From 3.3 and 3.7, by eliminating T, we obtain ∂ψ ∂2 φ ∂ψ ∂ 1 ∂ 2 2 2 − 2 − 2Ω Ω φ 1 τ2 α ∇ φ−g ∇ − χ ∂t ∂t ∂x ∂t ∂t ∂ ∂ ∂ 1 τ1 1 τ2 δ ∇2 φ 0, −ε ∂t ∂t ∂t 2 3.8 where χ K , ρs ε γ 2 T0 . ρK 3.9 From 3.4 and 3.5 by eliminating η, we obtain ∂ ∇ − s2 ∂t 2 ∂ψ ∂2 ψ ∂φ ∂φ 2 2 2 β ∇ ψ− 2 g 2Ω Ω ψ − s1 ∇4 0. ∂x ∂t ∂t ∂t 3.10 For a plane harmonic wave propagation in the x-direction, we assume ψ ψ1 eikx−ct , φ φ1 eikx−ct , ξ, η, ζ ξ1 , η1 , ζ1 eikx−ct . 3.11 3.12 Mathematical Problems in Engineering 9 From 3.12 into 2.20, 2.23, and 2.25, we get Dξ1 − ikζ1 0, 3.13 D2 ξ1 q2 ξ1 0, 3.14 D2 ζ1 q2 ζ1 0, 3.15 where d . dz 3.16 ζ1 B1 eiqz B2 e−iqz , 3.17 q A1 eiqz − A2 e−iqz − k B1 eiqz B2 e−iqz 0, 3.18 q2 ikcs2 − k2 , D≡ The solution of 3.14 and 3.15 takes the form ξ1 A1 eiqz A2 e−iqz , where A1 , A2 , B1 , and B2 are arbitrary constants. From 3.13 and 3.17, we obtain then qA1 − kB1 0, qA2 − kB2 0 ⇒ Aj −1j−1 k Bj , q j 1, 2. 3.19 Substituting 3.11 into 3.8 and 3.10, we obtain α2∗ D4 G1 D2 G2 φ1 − G3 D2 G4 ψ1 0, R1 D4 R2 D2 R3 ψ1 R4 D2 R5 φ1 0, where Γ0 1 − ikcτ0 , α2∗ Γ1 1 − ikcτ1 , Γ2 1 − ikcτ2 , Γ0 λ 2μ P μe H02 , ρ β∗2 Γ3 1 − ikcτ2 δ, 2Γ0 μ − P . 2ρ ikc G1 k2 c2 − 2α2∗ α2∗ Γ2 χεΓ1 Γ3 Ω2 , χ 3.20 10 Mathematical Problems in Engineering ikcΓ 2 G2 k4 α2∗ − c2 k2 1 − α2∗ Ω2 − k2 Ω2 ikεcΓ1 Γ3 , χ k2 cΓ2 3 G4 − g − 2Ωc ik , χ G3 ik g − 2Ωc , R2 k2 c2 − 2β∗2 ikc s2 β∗2 − 2k2 s1 Ω2 , R1 β∗2 ikcs1 , R3 k2 k2 − ikcs2 β∗2 − c2 ikc s2 Ω2 k4 s1 , R5 2Ωc − g ik3 − k2 cs2 . R4 ik g − 2Ωc , 3.21 The solution of 3.20 takes the form φ1 4 Cj eikNj z Dj e−ikNj z , j1 3.22 4 Ej eikNj z Fj e−ikNj z , ψ1 j1 where the constants Ej and Fj are related to the constants Cj and Dj in the form Ej mj Cj , Fj mj Dj , j 1, 2, 3, 4, 1 mj 2 g − 2Ωc ikNj − ik − εΓ2 /χ × α2∗ k2 Nj4 ikcΓ2 χ ikc 2 2 2 2 2 α∗ Γ2 χεΓ1 Γ3 Ω Nj2 − k c − 2α∗ χ 1− α2∗ Ω2 2 k − Ω ikεcΓ1 Γ3 2 3.23 . Substituting 3.22 into 3.11, we obtain φ 4 Cj eikNj z Dj e−ikNj z eikx−ct , j1 4 ψ Ej eikNj z Fj e−ikNj z eikx−ct , j1 3.24 Mathematical Problems in Engineering 11 and values of displacement components u and w are u ik 4 1 − Nj mj Cj eikNj z 1 Nj mj Dj e−ikNj z eikx−ct , j1 w ik 4 Nj mj Cj eikNj z mj − Nj Dj e−ikNj z eikx−ct , 3.25 j1 where N1 , N2 , N3 , and N4 are taken to be the complex roots of the following equation N 8 t1 N 6 t2 N 4 t3 N 2 t4 0, 3.26 where t1 ikc k2 2 1 c − 2α2∗ 2 α2∗ Γ2 χεΓ1 Γ3 Ω2 2 2 α∗ α∗ χ β∗ ikcs1 × k2 c2 − 2β∗2 ikc s2 β∗2 − 2k2 s1 Ω2 , 3.27 ikcΓ 1 4 2 2 2 2 2 2 2 2 t2 2 k α∗ − c k 1 − α∗ Ω − k Ω ikεcΓ1 Γ3 χ α∗ α2∗ β∗2 1 k2 c2 − 2β∗2 ikc s2 β∗2 − 2k2 s1 Ω2 ikcs1 ikc α2∗ Γ2 χεΓ1 Γ3 Ω2 × k2 c2 − 2α2∗ χ 1 2 k2 k2 − ikcs2 β∗2 − c2 ikc s2 Ω2 k4 s1 β∗ ikcs1 − t3 2 1 2 g − 2Ωc k , α2∗ β∗2 ikcs1 α2∗ 1 2 β∗ ikcs1 × k2 c2 − 2β∗2 ikc s2 β∗2 − 2k2 s1 Ω2 ikcΓ 2 k2 1 − α2∗ Ω2 − k2 Ω2 ikεcΓ1 Γ3 × k4 α2∗ − c2 χ 3.28 12 Mathematical Problems in Engineering k2 k2 − ikcs2 β∗2 − c2 ikc s2 Ω2 k4 s1 ikc α2∗ Γ2 χεΓ1 Γ3 Ω2 × k2 c2 − 2α2∗ χ 2 2 k2 cΓ2 3 3 − ik g − 2Ωc ik − ik g − 2Ωc ik − cs2 , χ 3.29 t4 1 2 β∗ ikcs × k2 k2 − ikcs2 β∗2 − c2 ikc s2 Ω2 k4 s1 × ik g − 2Ωc α2∗ 3.30 2 3 k2 cΓ2 2 3 . 2Ωc − g ik − k cs2 ik χ From 3.4, 3.11, 3.12, 3.22, and 3.23, we obtain η1 4 j1 1 2 2 k β∗ mj 1 Nj2 − mj k2 c2 Ω2 ik 2Ωc − g × Cj eikNj z Dj e−ikNj z . ikcs1 3.31 Using 3.22 and 3.11 into 3.3, we obtain T 4 ρ −α2∗ k2 1 Nj2 k2 c2 − ikgmj Cj eikNj z Dj e−ikNj z eikx−ct . γ Γ1 j1 3.32 With the lower medium, we use the symbols with primes, for ξ1 , ζ1 , η1 , T, φ, ψ, and q, for z > K, k ξ1 − B2 e−iq z , q η1 4 j1 ζ1 B2 e−iq z , 1 2 2 2 − mj k2 c2 Ω 2 ik 2Ω c − g Dj e−ikNj z , k β∗ mj 1 Nj ikcs1 T 4 ρ −α∗2 k2 1 Nj2 k2 c2 − ikgmj Dj e−ikNj z eikx−ct , γ Γ1 j1 Mathematical Problems in Engineering φ 4 13 Dj e−ikNj z eikx−ct , j1 ψ 4 Fj e−ikNj z eikx−ct . j1 3.33 4. Boundary Conditions and Frequency Equation In this section, we obtain the frequency equation for the boundary conditions which are specific to the interface z K, that is, i u u , ii w w , iii ξ ξ , iv η η , v ζ ζ , vi M33 M33 , vii M31 M31 , viii M32 M32 , ix τ33 τ 33 τ33 τ 33 x τ31 τ 31 τ31 τ 31 , xi τ32 τ 32 τ32 τ 32 , xii T T , xiii ∂T/∂z θT ∂T /∂z θT . The boundary conditions on the free surface z 0 are xiv M33 0, xv M31 0, xvi M32 0, xvii τ33 τ 33 0, xviii τ31 τ 31 0, xix τ32 τ 32 0, xx ∂T/∂z θT 0. 14 Mathematical Problems in Engineering From conditions iii, v, vi, and vii, we obtain B1 eiqK − B2 e−iqK −B2 e−iq K , B1 eiqK B2 e−iqK B2 e−iq K , M B1 eiqK − B2 e−iqK −M B2 e−iq K , 4.1 M B1 eiqK B2 e−iqK −M B2 e−iq K . Hence, B1 B2 B2 0, ξ ζ ξ ζ 0. 4.2 The other significant boundary conditions are responsible for the following relations: i 4 1 − Nj mj Cj eikNj K 1 Nj mj Dj e−ikNj K − 1 Nj mj Dj e−ikNj K 0, 4.3 j1 ii 4 Nj mj Cj eikNj K mj − Nj Dj e−ikNj K − mj − Nj Dj e−ikNj K 0, 4.4 j1 iv 4 1 2 2 k β∗ mj 1 Nj2 − mj k2 c2 Ω2 ik 2Ωc − g × Cj eikNj K Dj e−ikNj K cs1 j1 4 1 2 2 2 − mj k2 c2 Ω 2 ik 2Ω c − g Dj e−ikNj K 0, − k β∗ mj 1 Nj cs 1 j1 4.5 Mathematical Problems in Engineering 15 viii MNj 4 k 2 mj Nj2 j1 1 2 2 2 2 2 2 k β∗ mj 1 Nj − mj k c Ω ik 2Ωc − g 1 ikcs1 × Cj eikNj K − Dj e−ikNj K M Nj 4 k2 mj Nj2 1 j1 1 ikcs1 4.6 2 2 2 2 2 2 × k β∗ mj 1 Nj − mj k c Ω ik 2Ω c − g Dj e−ikNj K 0, ix 4 Γ0 λ μe H02 1 − Nj mj Γ0 λ 2μ μe H02 Nj2 mj Nj j1 × Cj eikNj K Γ0 λ μe H02 1 Nj mj Γ0 λ 2μ μe H02 Nj2 − mj Nj ig × Dj e−ikNj K ρ −α2∗ 1 Nj2 c2 − mj Cj eikNj K Dj e−ikNj K k −ikNj K − Γ0 λ μe H02 1 Nj mj Γ0 λ 2μ μe H02 Nj2 − mj Nj Dj e 4.7 ig −ρ −α∗2 1 Nj2 c2 − mj Dj e−ikNj K 0, k x 4 −2k2 Γ0 μNj Cj eikNj K − Dj e−ikNj K j1 F k2 β∗2 mj 1 Nj2 − mj k2 c2 Ω2 ik 2Ωc − g −k2 Γ0 μmj 1 − Nj2 s1 × Cj eikNj K Dj e−ikNj K − 2k2 Γ0 μ Nj Dj e−ikNj K − −k2 Γ0 μ mj 1− ×Dj e−ikNj K 0, Nj2 F 2 2 2 2 2 2 k β∗ mj 1 Nj − mj k c Ω ik 2Ω c − g s1 4.8 16 Mathematical Problems in Engineering xii 4 ρ j1 γ −α2∗ k2 Nj2 1 k2 c2 − igkmj Cj eikNj K Dj e−ikNj K 4.9 ρ − −α∗2 k2 Nj2 1 k2 c2 − igkmj Dj e−ikNj K 0, γ xiii 4 ρ 2 2 2 −α∗ k Nj 1 k2 c2 − igkmj θ ikNj Cj eikNj K θ − ikNj Dj e−ikNj K γ j1 ρ − −α∗2 k2 Nj2 1 k2 c2 − igkmj × θ − ikNj Dj e−ikNj K 0, γ 4.10 xvi MNj 4 k2 mj Nj2 1 j1 1 2 2 k β∗ mj 1 Nj2 − mj k2 c2 Ω2 ik 2Ωc − g ikcs1 × Cj − Dj 0, 4.11 xvii 4 Γ0 λ μe H02 1 − Nj mj Γ0 λ 2μ μe H02 Nj2 mj Nj Cj j1 Γ0 λ μe H02 1 Nj mj Γ0 λ 2μ μe H02 Nj2 − mj Nj Dj 4.12 ig ρ −α2∗ 1 Nj2 c2 − mj Cj Dj 0, k xviii 4 −2k2 Γ0 μNj Cj − Dj j1 F 4.13 −k2 Γ0 μmj 1 − Nj2 k2 β∗2 mj 1 Nj2 − mj k2 c2 Ω2 ik 2Ωc − g s1 × Cj Dj 0, Mathematical Problems in Engineering 17 xx 4 −α2∗ k2 Nj2 1 k2 c2 − igkmj θ ikNj Cj θ − ikNj Dj 0. 4.14 j1 5. Special Cases and Discussion 5.1. The Magnetic Field, Initial Stress, and Thermal Relaxation Time Are Neglected In this case i.e., H0 0, p 0, and τ1 τ2 0, 3.26 tends to V 8 h1 V 6 h2 V 4 h3 V 2 h4 0, 5.1 where α2∗ Γ0 λ 2μ , ρ β∗2 Γ0 μ , ρ 1 mj g − 2Ωc ikVj2 − ik − ε/χ ikc ikc Ω2 2 2 2 2 2 2 2 2 α∗ χε Ω Vj 1 − α∗ 2 − Ω ikεc , k c − 2α∗ χ χ k × h1 α2∗ k2 Vj4 − ikc k2 2 1 2 2 c − 2α χε Ω2 2 α ∗ ∗ 2 2 α∗ α∗ χ β∗ ikcs1 × k2 c2 − 2β∗2 ikc s2 β∗2 − 2k2 s1 Ω2 , h2 ikc 1 4 2 2 2 2 2 2 2 k − c ikεc k α 1 − α Ω − k Ω ∗ ∗ χ α2∗ α2∗ 1 2 k2 c2 − 2β∗2 ikc s2 β∗2 − 2k2 s1 Ω2 β∗ ikcs1 ikc α2∗ χε Ω2 × k2 c2 − 2α2∗ χ − β∗2 1 k2 k2 − ikcs2 β∗2 − c2 ikc s2 Ω2 k4 s1 ikcs1 2 1 2 g − 2Ωc k , α2∗ β∗2 ikcs1 18 Mathematical Problems in Engineering 1 h3 2 2 k2 c2 − 2β∗2 ikc s2 β∗2 − 2k2 s1 Ω2 α∗ β∗ ikcs1 ikc × k4 α2∗ − c2 k2 1 − α2∗ Ω2 − k2 Ω2 ikεc χ k2 k2 − ikcs2 β∗2 − c2 ikc s2 Ω2 k4 s1 ikc × k2 c2 − 2α2∗ α2∗ χε Ω2 χ − ik g − 2Ωc 2 k2 c ik χ 3 2 − ik g − 2Ωc ik − cs2 , 3 1 h4 2 2 k2 k2 − ikcs2 β∗2 − c2 ikc s2 Ω2 k4 s1 × ik g − 2Ωc α∗ β∗ ikcs 2 3 k2 c 2 3 . ik − k cs2 ik 2Ωc − g χ 5.2 Also, η1 4 j1 1 2 2 k β∗ mj 1 Vj2 − mj k2 c2 Ω2 ik 2Ωc − g × Cj eikVj z Dj e−ikVj z . ikcs1 T 4 ρ −α2∗ k2 1 Vj2 k2 c2 − ikgmj Cj eikVj z Dj e−ikVj z eikx−ct , γ j1 k ξ1 − B2 e−iq z , q η1 4 j1 ζ1 B2 e−iq z , 1 2 2 2 − mj k2 c2 Ω 2 ik 2Ω c − g Dj e−ikVj z , k β∗ mj 1 Vj ikcs1 T 4 ρ −α∗2 k2 1 Vj 2 k2 c2 − ikgmj Dj e−ikVj z eikx−ct , γ j1 φ1 4 Dj e−ikVj z , j1 ψ1 4 Fj e−ikVj z , j1 5.3 Mathematical Problems in Engineering 19 Using the boundary conditions, we obtain ⎡ ⎡ d16 d11 d12 · · · d18 d15 ⎢ ⎢ d21 d22 · · · d28 d25 d26 ⎢ ⎢ . .. .. .. .. .. ⎢ .. . . . . . ⎣ d121 d122 · · · d128 d125 d126 C1 ⎤ ⎢ ⎥ ⎢C ⎥ ⎢ 2⎥ ⎢ ⎥ ⎢C ⎥ ⎢ 3⎥ ⎢ ⎥ ⎢C ⎥ ⎢ 4⎥ ⎢ ⎥ ⎤ ⎥ · · · d18 ⎢ ⎢D1 ⎥ ⎥ ⎢ ⎥ ⎥ ⎥⎢ · · · d28 D2 ⎥ ⎥⎢ ⎥ ⎢ .. .. ⎥ ⎢ ⎥ 0, D ⎢ 3 . . ⎥ ⎦⎢ ⎥ ⎥ ⎢ ⎥ · · · d128 ⎢D4 ⎥ ⎢ ⎥ ⎢ ⎥ ⎢D1 ⎥ ⎢ ⎥ ⎢ ⎥ ⎢D2 ⎥ ⎢ ⎥ ⎢ ⎥ ⎢D3 ⎥ ⎣ ⎦ D4 5.4 where d1j 1 − Vj mj Cj eikVj K 1 Vj mj Dj e−ikVj K , d2j Vj mj Cj eikVj K mj − Vj Dj e−ikVj K , d1j 1 Vj mj Dj e−ikVj K , d2j mj − Vj Dj e−ikVj K , 1 2 2 k β∗ mj 1 Vj2 − mj k2 c2 Ω2 ik 2Ωc − g Cj eikVj z Dj e−ikVj z , cs1 1 −ikVj z d3j k2 β∗2 mj 1 Vj 2 − mj k2 c2 Ω2 ik 2Ωc − g Dj e , cs1 1 2 2 d4j MVj k2 mj Vj2 1 k β∗ mj 1 Vj2 − mj k2 c2 Ω2 ik 2Ωc − g ikcs1 × Cj eikVj K − Dj e−ikVj K , 1 2 2 2 2 2 2 2 2 k β∗ mj 1 Vj − mj k c Ω ik 2Ωc − g d4j M Vj k mj Vj 1 ikcs1 d3j × Dj e−ikVj K , d5j Γ0 λ 1 − Vj mj Γ0 λ 2μ Vj2 mj Vj Cj eikVj K Γ0 λ 1 Vj mj Γ0 λ 2μ Vj2 − mj Vj Dj e−ikVj K ig 2 2 2 ρ −α∗ 1 Vj c − mj Cj eikVj K Dj e−ikVj K , k 20 Mathematical Problems in Engineering ig d5j Γ0 λ 1 Vj mj Γ0 λ 2μ Vj 2 − mj Vj Dj e−ikVj K ρ −α∗2 1 Vj 2 c2 − mj k −ikVj K ×Dj e , d6j −2k2 Γ0 μVj Cj eikVj K − Dj e−ikVj K F 2 2 2 2 2 2 2 2 −k Γ0 μmj 1 − Vj k β∗ mj 1 Vj − mj k c Ω ik 2Ωc − g s1 × Cj eikVj K Dj e−ikVj K , 2k2 Γ0 μ Vj Dj e−ikVj K d6j F 2 2 2 2 2 2 2 2 −k Γ 0 μ mj 1 − Vj k β∗ mj 1 Vj − mj k c Ω ik 2Ωc − g s1 × Dj e d7j −ikVj K , ρ 2 2 2 −α∗ k Vj 1 k2 c2 − igkmj Cj eikVj K Dj e−ikVj K , γ ρ 2 2 2 −α∗ k Vj 1 k2 c2 − igkmj Dj e−ikVj K , γ ρ 2 2 2 d8j −α∗ k Vj 1 k2 c2 − igkmj θ ikVj Cj eikVj K θ − ikVj Dj e−ikVj K , γ d7j ρ 2 2 2 −ikVj K , −α∗ k Vj 1 k2 c2 − igkmj θ − ikVj Dj e γ 1 2 2 k β∗ mj 1 Vj2 − mj k2 c2 Ω2 ik 2Ωc − g d9j MVj k2 mj Vj2 1 ikcs1 × Cj − Dj , d10j Γ0 λ 1 − Vj mj Γ0 λ 2μ Vj2 mj Vj Cj d8j Γ0 λ 1 Vj mj Γ0 λ 2μ Vj2 − mj Vj Dj ig 1 c − mj Cj Dj , ρ k −2k2 Γ0 μVj Cj − Dj F k2 β∗2 mj 1 Vj2 − mj k2 c2 Ω2 ik 2Ωc − g −k2 Γ0 μmj 1 − Vj2 s1 × Cj Dj , −α2∗ k2 Vj2 1 k2 c2 − igkmj θ ikVj Cj θ − ikVj Dj , −α2∗ d11j d12j Vj2 2 d10j d11j d12j 0, d9j j 1, 2, 3, 4. 5.5 Mathematical Problems in Engineering 21 5.2. The Magnetic Field, Initial Stress, Rotation, and Thermal Relaxation Time Are Neglected and in Viscoelastic Medium In this case i.e., H0 0, P 0, Ω 0, and τ0 τ1 τ2 0, the previous results obtained as in Abd-Alla et al. 20. 5.3. Absence of the Gravity Field In this case, we put g 0, then 3.20 becomes α2∗ D4 G1 D2 G2 φ1 − G∗3 D2 G∗4 ψ1 0, R1 D4 R2 D2 R3 ψ1 R∗4 D2 R∗5 φ1 0, 5.6 where k2 cΓ2 , 2Ωc ik χ R∗5 2Ωc ik3 − k2 cs2 , G∗3 −2ikΩc, R∗4 −2ikΩc, G∗4 3 5.7 and G1 , G2 , R1 , R2 , and R3 are as in 3. The solution of 5.6 take the form φ 4 Cj∗ eikXj z Dj∗ e−ikXj z eikx−ct , j1 4 Ej∗ eikXj z Fj∗ e−ikXj z eikx−ct , ψ 5.8 j1 where Ej∗ m∗j Cj∗ , m∗j Fj∗ m∗j Dj∗ , j 1, 2, 3, 4, 5.9 1 −2Ωc ikXj2 − ik − εΓ2 /χ × ikc 2 2 2 2 2 − k c − 2α∗ α∗ Γ2 χεΓ1 Γ3 Ω Xj2 χ ikcΓ2 Ω2 2 2 1 − α∗ 2 − Ω ikεcΓ1 Γ3 , χ k α2∗ k2 Xj4 5.10 22 Mathematical Problems in Engineering and X1 , X2 , X3 , and X4 are taken to be the complex roots of equation X 8 t∗1 X 6 t∗2 X 4 t∗3 X 2 t∗4 0, where t∗1 ikc k2 2 1 2 2 c Ω2 2 − 2α Γ χεΓ Γ α 2 1 3 ∗ ∗ 2 2 α∗ α∗ χ β∗ ikcs1 × k2 c2 − 2β∗2 ikc s2 β∗2 − 2k2 s1 Ω2 , t∗2 ikcΓ 1 4 2 2 2 2 2 2 2 2 k 1 − α∗ Ω − k Ω ikεcΓ1 Γ3 2 k α∗ − c χ α∗ 1 2 2 2 2 2 2 k c ikc s Ω − 2β β − 2k s 2 1 ∗ ∗ α2∗ β∗2 ikcs1 ikc 2 2 2 2 2 α∗ Γ2 χεΓ1 Γ3 Ω × k c − 2α∗ χ 1 2 k2 k2 − ikcs2 β∗2 − c2 ikc s2 Ω2 k4 s1 β∗ ikcs1 − t∗3 1 2 2 2 Ω c 4k , α2∗ β∗2 ikcs1 1 α2∗ β∗2 ikcs1 × k2 c2 − 2β∗2 ikc s2 β∗2 − 2k2 s1 Ω2 ikcΓ 2 4 2 2 2 2 2 2 2 k 1 − α∗ Ω − k Ω ikεcΓ1 Γ3 × k α∗ − c χ k2 k2 − ikcs2 β∗2 − c2 ikc s2 Ω2 k4 s1 ikc × k2 c2 − 2α2∗ α2∗ Γ2 χεΓ1 Γ3 Ω2 χ k2 cΓ2 −4Ω c ik ik χ 2 2 3 ik ik − cs2 3 , 5.11 Mathematical Problems in Engineering 1 ∗ t4 2 2 k2 k2 − ikcs2 β∗2 − c2 ikc s2 Ω2 k4 s1 −2ikΩc α∗ β∗ ikcs 4Ω c 2 2 u ik 4 ik − k cs2 3 2 k2 cΓ2 ik χ 23 3 , 1 − Xj m∗j Cj∗ eikXj z 1 Xj m∗j Dj∗ e−ikXj z eikx−ct , j1 w ik 4 Xj m∗j Cj∗ eikXj z m∗j − Xj Dj∗ e−ikXj z eikx−ct , j1 η1 4 j1 T 1 2 2 ∗ k β∗ mj 1 Xj2 − m∗j k2 c2 Ω2 2ikΩc × Cj∗ eikXj z Dj∗ e−ikXj z , ikcs1 4 ρ −α2∗ k2 1 Xj2 k2 c2 Cj∗ eikXj z Dj∗ e−ikXj z eikx−ct . γ Γ1 j1 5.12 With the lower medium, we use the symbols with primes, for ξ1 , ζ1 , η1 , T, φ, ψ, and q, for z > K, k ξ1 − B2 e−iq z , q η1 4 j1 ζ1 B2 e−iq z , 1 2 2 ∗ 2 ∗ 2 2 2 β m c Ω c Dj∗ e−ikXj z , k 1 X − m k 2ikΩ ∗ j j j ikcs1 T 4 ρ 2 2 2 2 2 −α 1 X k Dj∗ e−ikXj z eikx−ct , k c ∗ j γ Γ1 j1 φ 4 5.13 Dj e−ikNj z eikx−ct , j1 ψ 4 Fj∗ e−ikXj z eikx−ct . j1 From conditions iii, v, vi, vii, we get the same equations 4.1 and 4.2: the other significant boundary conditions are responsible for the following relations: 24 Mathematical Problems in Engineering i q1 C1∗ eikX1 K q2 C2∗ eikX2 K q3 C3∗ eikX3 K q4 C4∗ eikX4 K q5 D1∗ e−ikX1 K q6 D2∗ e−ikX2 K q7 D3∗ e−ikX3 K q8 D4∗ e−ikX4 K 5.14 q9 D1∗ e−ikX1 K q10 D2∗ e−ikX2 K q11 D3∗ e−ikX3 K q12 D4∗ e−ikX4 K , ii q13 C1∗ eikX1 K q14 C2∗ eikX2 K q15 C3∗ eikX3 K q16 C4∗ eikX4 K q17 D1∗ e−ikX1 K q18 D2∗ e−ikX2 K q19 D3∗ e−ikX3 K q20 D4∗ e−ikX4 K 5.15 q21 D1∗ e−ikX1 K q22 D2∗ e−ikX2 K q23 D3∗ e−ikX3 K q24 D4∗ e−ikX4 K , iv q25 C1∗ eikX1 K q26 C2∗ eikX2 K q27 C3∗ eikX3 K q28 C4∗ eikX4 K q25 D1∗ e−ikX1 K q26 D2∗ e−ikX2 K q27 D3∗ e−ikX3 K q28 D4∗ e−ikX4 K 5.16 q29 D1∗ e−ikX1 K q30 D2∗ e−ikX2 K q31 D3∗ e−ikX3 K q32 D4∗ e−ikX4 K , viii q33 C1∗ eikX1 K q34 C2∗ eikX2 K q35 C3∗ eikX3 K q36 C4∗ eikX4 K − q33 D1∗ e−ikX1 K − q34 D2∗ e−ikX2 K − q35 D3∗ e−ikX3 K − q36 D4∗ e−ikX4 K 5.17 −q37 D1∗ e−ikX1 K − q38 D2∗ e−ikX2 K − q39 D3∗ e−ikX3 K − q40 D4∗ e−ikX4 K , ix q41 C1∗ eikX1 K q42 C2∗ eikX2 K q43 C3∗ eikX3 K q44 C4∗ eikX4 K q45 D1∗ e−ikX1 K q46 D2∗ e−ikX2 K q47 D3∗ e−ikX3 K q48 D4∗ e−ikX4 K 5.18 q49 D1∗ e−ikX1 K q50 D2∗ e−ikX2 K q51 D3∗ e−ikX3 K q52 D4∗ e−ikX4 K , x q53 C1∗ eikX1 K q54 C2∗ eikX2 K q55 C3∗ eikX3 K q56 C4∗ eikX4 K q57 D1∗ e−ikX1 K q58 D2∗ e−ikX2 K q59 D3∗ e−ikX3 K q60 D4∗ e−ikX4 K 5.19 q61 D1∗ e−ikX1 K q62 D2∗ e−ikX2 K q63 D3∗ e−ikX3 K q64 D4∗ e−ikX4 K , Mathematical Problems in Engineering 25 xii q65 C1∗ eikX1 K q66 C2∗ eikX2 K q67 C3∗ eikX3 K q68 C4∗ eikX4 K q65 D1∗ e−ikX1 K q66 D2∗ e−ikX2 K q67 D3∗ e−ikX3 K q68 D4∗ e−ikX4 K 5.20 q69 D1 ∗ e−ikX1 K q70 D2∗ e−ikX2 K q71 D3∗ e−ikX3 K q72 D4∗ e−ikX4 K , xiii q73 C1∗ eikX1 K q74 C2∗ eikX2 K q75 C3∗ eikX3 K q76 C4∗ eikX4 K q77 D1∗ e−ikX1 K q78 D2∗ e−ikX2 K q79 D3∗ e−ikX3 K q80 D4∗ e−ikX4 K 5.21 q81 D1∗ e−ikX1 K q82 D2∗ e−ikX2 K q83 D3∗ e−ikX3 K q84 D4∗ e−ikX4 K , xvi q85 C1∗ eikX1 K q86 C2∗ eikX2 K q87 C3∗ eikX3 K q88 C4∗ eikX4 K − q85 D1∗ e−ikX1 K q86 D2∗ e−ikX2 K q87 D3∗ e−ikX3 K q88 D4∗ e−ikX4 K 0, 5.22 xvii q89 C1∗ eikX1 K q90 C2∗ eikX2 K q91 C3∗ eikX3 K q92 C4∗ eikX4 K q93 D1∗ e−ikX1 K q94 D2∗ e−ikX2 K q95 D3∗ e−ikX3 K q96 D4∗ e−ikX4 K 0, 5.23 xviii q97 C1∗ eikX1 K q98 C2∗ eikX2 K q99 C3∗ eikX3 K q100 C4∗ eikX4 K q101 D1∗ e−ikX1 K q102 D2∗ e−ikX2 K q103 D3∗ e−ikX3 K q104 D4∗ e−ikX4 K 0, 5.24 xx q105 C1∗ eikX1 K q106 C2∗ eikX2 K q107 C3∗ eikX3 K q108 C4∗ eikX4 K q109 D1∗ e−ikX1 K q110 D2∗ e−ikX2 K q111 D3∗ e−ikX3 K q112 D4∗ e−ikX4 K 0, 5.25 26 Mathematical Problems in Engineering where q1 1 − X1 m∗1 , q2 1 − X2 m∗2 , q3 1 − X3 m∗3 , q4 1 − X4 m∗4 , q5 1 X1 m∗1 , q6 1 X2 m∗2 , q7 1 X3 m∗3 , q8 1 X4 m∗4 , q9 1 X1 m∗ q0 1 X2 m∗ q11 1 X3 m∗ q12 1 X4 m∗ 2 , 3 , 1 , 4 , q13 X1 m∗1 , q14 X2 m∗2 , q15 X3 m∗3 , q16 X4 m∗4 , q17 m∗1 − X1 , q18 m∗2 − X2 , q19 m∗3 − X3 , q20 m∗4 − X4 , ∗ ∗ ∗ q21 m∗ q22 m 2 − X 2 , q23 m 3 − X 3 , q24 m 4 − X 4 , 1 − X1 , 1 2 2 ∗ q25 k β∗ m1 1 X12 − m∗1 k2 c2 Ω2 2ikΩc , cs1 1 2 2 ∗ k β∗ m4 1 X22 − m∗2 k2 c2 Ω2 2ikΩc , q26 cs1 1 2 2 ∗ q27 k β∗ m3 1 X32 − m∗3 k2 c2 Ω2 2ikΩc , cs1 1 2 2 ∗ q28 k β∗ m4 1 X42 − m∗4 k2 c2 Ω2 2ikΩc , cs1 1 2 ∗ 2 ∗ q29 k2 β ∗ m 1 1 X 1 − m 1 k2 c2 Ω2 2ikΩc , cs1 1 2 ∗ 2 ∗ q30 k2 β ∗ m 2 1 X 2 − m 2 k2 c2 Ω2 2ikΩc , cs1 1 2 ∗ 2 ∗ q31 k2 β ∗ m 3 1 X 3 − m 3 k2 c2 Ω2 2ikΩc , cs1 1 2 ∗ 2 ∗ q32 k2 β ∗ m 4 1 X 4 − m 4 k2 c2 Ω2 2ikΩc , cs1 1 2 2 ∗ 2 ∗ 2 2 ∗ 2 2 2 k β∗ m1 1 X1 − m1 k c Ω 2ikΩc , q33 MX1 k m1 X1 1 ikcs1 1 2 2 ∗ 2 ∗ 2 2 ∗ 2 2 2 k β∗ m2 1 X2 − m2 k c Ω 2ikΩc , q34 MX2 k m2 X2 1 ikcs1 1 2 2 ∗ q35 MX3 k2 m∗3 X32 1 k β∗ m3 1 X32 − m∗3 k2 c2 Ω2 2ikΩc , ikcs1 1 2 2 ∗ k β∗ m4 1 X42 − m∗4 k2 c2 Ω2 2ikΩc , q36 MX4 k2 m∗4 X42 1 ikcs1 1 2 2 ∗ 2 2 2 ∗ 2 2 2 q37 M X1 k m 1 X 1 1 k β ∗ m 1 1 X 1 − m 1 k c Ω 2ikΩc , ikcs1 1 2 2 ∗ 2 2 2 ∗ 2 2 2 k β ∗ m 2 1 X 2 − m 2 k c Ω 2ikΩc , q38 M X2 k m 2 X 2 1 ikcs1 1 2 2 ∗ 2 2 2 ∗ 2 2 2 q39 M X3 k m 3 X 3 1 k β ∗ m 3 1 X 3 − m 3 k c Ω 2ikΩc , ikcs 1 1 2 2 ∗ 2 2 2 ∗ 2 2 2 q40 M X4 k m 4 X 4 1 k β ∗ m 4 1 X 1 − m 4 k c Ω 2ikΩc , ikcs 1 Mathematical Problems in Engineering 27 q41 Γ0 λ μe H02 1 − X1 m∗1 Γ0 λ 2μ μe H02 X12 m∗1 X1 ρ −α2∗ 1 X12 c2 , q42 Γ0 λ μe H02 1 − X2 m∗2 Γ0 λ 2μ μe H02 X22 m∗2 X2 ρ −α2∗ 1 X22 c2 , q43 Γ0 λ μe H02 1 − X3 m∗3 Γ0 λ 2μ μe H02 X32 m∗3 X3 ρ −α2∗ 1 X32 c2 , F ∗ 2 2 ∗ 2 ∗ q64 2k2 Γ0 μ X4 − k2 Γ0 μ m 4 1 − X 4 k2 β ∗ m 4 1 X 4 − m 4 k2 c2 Ω2 2ikΩc , s1 q44 Γ0 λ μe H02 1 − X4 m∗4 Γ0 λ 2μ μe H02 X42 m∗4 X4 ρ −α2∗ 1 X42 c2 , q45 Γ0 λ μe H02 1 X1 m∗1 Γ0 λ 2μ μe H02 X12 − m∗1 X1 ρ −α2∗ 1 X12 c2 , q46 Γ0 λ μe H02 1 X2 m∗2 Γ0 λ 2μ μe H02 X22 − m∗2 X2 ρ −α2∗ 1 X22 c2 , q47 Γ0 λ μe H02 1 X3 m∗3 Γ0 λ 2μ μe H02 X32 − m∗3 X3 ρ −α2∗ 1 X32 c2 , q48 Γ0 λ μe H02 1 X4 m∗4 Γ0 λ 2μ μe H02 X42 − m∗4 X4 ρ −α2∗ 1 X42 c2 , ∗ 2 ∗ q49 Γ 0 λ μ e H02 1 X 1 m 1 Γ 0 λ 2μ μ e H02 X 1 − m 1 X 1 2 2 ρ −α ∗ 1 X 1 c2 , ∗ 2 ∗ q50 Γ 0 λ μ e H02 1 X 2 m 2 Γ 0 λ 2μ μ e H02 X 2 − m 2 X 2 2 2 ρ −α ∗ 1 X 2 c2 , ∗ 2 ∗ q51 Γ 0 λ μ e H02 1 X 3 m 3 Γ 0 λ 2μ μ e H02 X 3 − m 3 X 3 2 2 ρ −α ∗ 1 X 3 c2 , ∗ 2 ∗ q52 Γ 0 λ μ e H02 1 X 4 m 4 Γ 0 λ 2μ μ e H02 X 4 − m 4 X 4 2 2 ρ −α ∗ 1 X 4 c2 , F k2 β∗2 m∗1 1 X12 − m∗1 k2 c2 Ω2 2ikΩc , q53 −2k2 Γ0 μX1 − k2 Γ0 μm∗1 1 − X12 s1 F k2 β∗2 m∗2 1 X22 − m∗2 k2 c2 Ω2 2ikΩc , q54 −2k2 Γ0 μX2 − k2 Γ0 μm∗2 1 − X22 s1 F q55 −2k2 Γ0 μX3 − k2 Γ0 μm∗3 1 − X32 k2 β∗2 m∗3 1 X32 − m∗3 k2 c2 Ω2 2ikΩc , s1 F k2 β∗2 m∗4 1 X42 − m∗4 k2 c2 Ω2 2ikΩc , q56 −2k2 Γ0 μX4 − k2 Γ0 μm∗4 1 − X42 s1 F k2 β∗2 m∗1 1 X12 − m∗1 k2 c2 Ω2 2ikΩc , q57 2k2 Γ0 μX1 − k2 Γ0 μm∗1 1 − X12 s1 28 Mathematical Problems in Engineering F q58 2k2 Γ0 μX2 − k2 Γ0 μm∗2 1 − X22 k2 β∗2 m∗2 1 X22 − m∗2 k2 c2 Ω2 2ikΩc , s1 F k2 β∗2 m∗3 1 X32 − m∗3 k2 c2 Ω2 2ikΩc , q59 2k2 Γ0 μX3 − k2 Γ0 μm∗3 1 − X32 s1 F k2 β∗2 m∗4 1 X42 − m∗4 k2 c2 Ω2 2ikΩc , q60 2k2 Γ0 μX4 − k2 Γ0 μm∗4 1 − X42 s1 F ∗ 2 2 ∗ 2 ∗ q61 2k2 Γ0 μ X1 − k2 Γ0 μ m 1 1 − X 1 k2 β ∗ m 1 1 X 1 − m 1 k2 c2 Ω2 2ikΩc , s1 F ∗ 2 2 ∗ 2 ∗ q62 2k2 Γ0 μ X2 − k2 Γ0 μ m 2 1 − X 2 k2 β ∗ m 2 1 X 2 − m 2 k2 c2 Ω2 2ikΩc , s1 F ∗ 2 2 ∗ 2 ∗ q63 2k2 Γ0 μ X3 − k2 Γ0 μ m 3 1 − X 3 k2 β ∗ m 3 1 X 3 − m 3 k2 c2 Ω2 2ikΩc , s1 ρ ρ q65 −α2∗ k2 X12 1 k2 c2 , q66 −α2∗ k2 X22 1 k2 c2 , γ γ ρ 2 2 2 ρ −α∗ k X3 1 k2 c2 , q68 −α2∗ k2 X42 1 k2 c2 , q67 γ γ q69 q71 q73 q75 q77 q79 q81 q86 q87 q70 ρ 2 2 2 2 2 −α X , k 1 k c ∗ 2 γ ρ 2 2 2 ρ 2 2 2 2 2 2 2 −α X , q −α X , k 1 k c k 1 k c 72 ∗ 3 ∗ 4 γ γ ρ 2 2 2 ρ −α∗ k X1 1 k2 c2 θ ikX1 , q74 −α2∗ k2 X22 1 k2 c2 θ ikX2 , γ γ ρ 2 2 2 ρ −α∗ k X3 1 k2 c2 θ ikX3 , q76 −α2∗ k2 X42 1 k2 c2 θ ikX4 , γ γ ρ ρ −α2∗ k2 X12 1 k2 c2 θ − ikX1 , q78 −α2∗ k2 X22 1 k2 c2 θ − ikX2 , γ γ ρ ρ −α2∗ k2 X32 1 k2 c2 θ − ikX3 , q80 −α2∗ k2 X42 1 k2 c2 θ − ikX4 , γ γ ρ 2 2 2 2 2 k 1 k c −α X θ − ikX 1 , ∗ 1 γ q82 ρ 2 2 2 2 2 k 1 k c −α X θ − ikX 2 , ∗ 2 γ ρ 2 2 2 ρ 2 2 2 2 2 k 1 k c , q −α X θ − ikX −α ∗ k X 3 1 k2 c2 θ − ikX 3 , 3 84 ∗ 3 γ γ 1 2 2 ∗ k β∗ m1 1 X12 − m∗1 k2 c2 Ω2 2ikΩc , MX1 k2 m∗1 X12 1 ikcs1 1 2 2 ∗ MX2 k2 m∗j X22 1 k β∗ m2 1 X22 − m∗2 k2 c2 Ω2 2ikΩc , ikcs1 1 2 2 ∗ k β∗ m3 1 X32 − m∗3 k2 c2 Ω2 2ikΩc , MX3 k2 m∗j X32 1 ikcs1 q83 q85 ρ 2 2 2 2 2 −α X , k 1 k c ∗ 1 γ Mathematical Problems in Engineering 29 1 2 2 ∗ q88 MX4 k2 m∗4 X42 1 k β∗ m4 1 X42 − m∗4 k2 c2 Ω2 2ikΩc , ikcs1 q89 Γ0 λ μe H02 1 − X1 m∗1 Γ0 λ 2μ μe H02 X12 m∗1 X1 ρ −α2∗ 1 X12 c2 , q90 Γ0 λ μe H02 1 − X2 m∗2 Γ0 λ 2μ μe H02 X22 m∗2 X2 ρ −α2∗ 1 X22 c2 , q91 Γ0 λ μe H02 1 − X3 m∗3 Γ0 λ 2μ μe H02 X32 m∗3 X3 ρ −α2∗ 1 X32 c2 , q92 Γ0 λ μe H02 1 − X4 m∗4 Γ0 λ 2μ μe H02 X42 m∗4 X4 ρ −α2∗ 1 X42 c2 , q93 Γ0 λ μe H02 1 X1 m∗1 Γ0 λ 2μ μe H02 X12 − m∗1 X1 ρ −α2∗ 1 X12 c2 , q94 Γ0 λ μe H02 1 X2 m∗2 Γ0 λ 2μ μe H02 X22 − m∗2 X2 ρ −α2∗ 1 X22 c2 , q95 Γ0 λ μe H02 1 X3 m∗3 Γ0 λ 2μ μe H02 X32 − m∗3 X3 ρ −α2∗ 1 X32 c2 , q96 Γ0 λ μe H02 1 X4 m∗4 Γ0 λ 2μ μe H02 X42 − m∗4 X4 ρ −α2∗ 1 X42 c2 , F k2 β∗2 m∗1 1 X12 − m∗1 k2 c2 Ω2 2ikΩc , q97 −2k2 Γ0 μX1 − k2 Γ0 μm∗1 1 − X12 s1 F q98 −2k2 Γ0 μX2 − k2 Γ0 μm∗2 1 − Xj2 k2 β∗2 m∗2 1 X22 − m∗2 k2 c2 Ω2 2ikΩc , s1 F k2 β∗2 m∗3 1 X32 − m∗3 k2 c2 Ω2 2ikΩc , q99 −2k2 Γ0 μX3 − k2 Γ0 μm∗3 1 − X32 s1 F k2 β∗2 m∗4 1 X42 − m∗4 k2 c2 Ω2 2ikΩc , q100 −2k2 Γ0 μX4 − k2 Γ0 μm∗4 1 − X42 s1 F q101 2k2 Γ0 μX1 − k2 Γ0 μm∗1 1 − X12 k2 β∗2 m∗1 1 X12 − m∗1 k2 c2 Ω2 2ikΩc , s1 F k2 β∗2 m∗2 1 X22 − m∗2 k2 c2 Ω2 2ikΩc , q102 2k2 Γ0 μX2 − k2 Γ0 μm∗2 1 − X22 s1 F k2 β∗2 m∗3 1 X32 − m∗3 k2 c2 Ω2 2ikΩc , q103 2k2 Γ0 μX3 − k2 Γ0 μm∗3 1 − X32 s1 F q104 2k2 Γ0 μX4 − k2 Γ0 μm∗4 1 − X42 k2 β∗2 m∗4 1 X42 − m∗4 k2 c2 Ω2 2ikΩc , s1 q105 −α2∗ k2 X12 1 k2 c2 θ ikX1 , q106 −α2∗ k2 X22 1 k2 c2 θ ikX2 , q107 −α2∗ k2 X32 1 k2 c2 θ ikX3 , q108 −α2∗ k2 X42 1 k2 c2 θ ikX4 , q109 −α2∗ k2 X12 1 k2 c2 θ − ikX1 , q110 −α2∗ k2 X22 1 k2 c2 θ − ikX2 , q111 −α2∗ k2 X32 1 k2 c2 θ − ikX3 , q112 −α2∗ k2 X42 1 k2 c2 θ − ikX4 . 5.26 30 Mathematical Problems in Engineering Elimination of Cj∗ , Dj∗ , and D ∗j gives the wave velocity equation in the determinant form det dij 0. 5.27 This equation has complex roots: the real part Re gives the Rayleigh wave velocity, and the imaginary part Im gives the attenuation coefficient due to the friction of the granular nature of the medium, where the nonvanishing of the twelfth-order determinant of dij is given by q85 e−ikX1 K q86 e−ikX2 K q87 e−ikX3 K q88 e−ikX4 K q85 eikX1 K q86 eikX2 K q87 eikX3 K q88 eikX4 K 0 0 0 0 −ikX1 K −ikX2 K −ikX3 K −ikX4 K ikX1 K ikX2 K ikX3 K ikX4 K 0 0 0 0 q100 e−ikX4 K q101 eikX1 K q102 eikX2 K q103 eikX3 K q104 eikX4 K 0 0 0 0 q105 e−ikX1 K q106 e−ikX2 K q107 e−ikX3 K q108 e−ikX4 K q109 eikX1 K q110 eikX2 K q111 eikX3 K q112 eikX4 K 0 0 0 0 q21 q22 q23 q24 q29 q30 q31 q32 q89 e q97 e−ikX1 K q90 e q91 e q98 e−ikX2 K q92 e q99 e−ikX3 K q93 e q94 e q95 e q96 e q13 q14 q15 q16 q25 q26 q27 q28 q25 q26 q27 q28 q33 q34 q35 q36 −q33 −q34 −q35 −q36 q41 q42 q43 q44 q45 q46 q47 q48 q49 q50 q51 q52 q53 q54 q55 q56 q57 q58 q59 q60 q61 q62 q63 q64 q65 q66 q67 q68 q65 q66 q67 q68 q69 q70 q71 q72 q73 q74 q75 q76 q77 q78 q79 q80 q81 q82 q83 q84 q1 q2 q3 q4 q5 q6 q7 q8 q9 q10 q11 q12 q17 q18 q19 q20 −q37 −q38 −q39 −q40 0. 5.28 5.4. The Gravity Field, Initial Stress, and Magnetic Field Are Neglected and There Is Uncoupling between the Temperature and Strain Field In this case g 0, P 0, H0 0, and θ 0, we obtain α2∗ lim m∗j ε→0 1 −2Ωc ikXj2 − ik × α2∗ k2 Xj4 Γ0 λ 2μ , ρ β∗2 Γ0 μ , ρ ikc ikcΓ2 Ω2 2 2 2 2 2 2 2 2 α Γ2 Ω Xj − k c − 2α∗ 1 − α∗ 2 − Ω , χ ∗ χ k q22 q23 q24 q30 q31 q32 lim −q38 −q39 −q40 0. γ →0 q50 q51 q52 q62 q63 q64 5.29 Mathematical Problems in Engineering 31 Multiplying the rows 10, 11, and 12 of the determinant |dij | by γ and then taking limγ → 0 , 5.28 reduces, after some computation, to the following ninth-order determinant equation: q85 e−ikX1 K q86 e−ikX2 K q87 e−ikX3 K q88 e−ikX4 K q85 eikX1 K q86 eikX2 K q87 eikX3 K q88 eikX4 K 0 e−ikX1 K e−ikX2 K e−ikX3 K e−ikX4 K eikX1 K eikX2 K eikX3 K eikX4 K 0 ikX4 K 0 q105 e−ikX1 K q106 e−ikX2 K q107 e−ikX3 K q108 e−ikX4 K q109 eikX1 K q110 eikX2 K q111 eikX3 K q112 eikX4 K 0 q89 q97 e −ikX1 K q90 q98 e q91 −ikX2 K q99 e −ikX3 K q92 q100 e −ikX4 K q93 q101 e ikX1 K q17 q94 q102 e ikX2 K q95 q103 e q18 ikX3 K q96 q104 e q13 q14 q15 q16 q19 q20 q21 q25 q26 q27 q28 q25 q26 q27 q28 q29 q33 q34 q35 q36 −q33 −q34 −q35 −q36 −q37 q41 q42 q43 q44 q45 q46 q47 q48 q49 q53 q54 q55 q56 q57 q58 q59 q60 q61 0, 5.30 where q1 1 − X1 m∗1 , q5 1 X1 m∗1 , q9 1 X1 m∗ 1 , q13 X1 m∗1 , q17 m∗1 − X1 , q21 m∗ 1 − X1 , q2 1 − X2 m∗2 , q6 1 X2 m∗2 , q10 1 X2 m∗ 2 , q14 X2 m∗2 , q18 m∗2 − X2 , q22 m∗ 2 − X2 , q3 1 − X3 m∗3 , q7 1 X3 m∗3 , q11 1 X3 m∗ 3 , q15 X3 m∗3 , q19 m∗3 − X3 , q23 m∗ 3 − X3 , q4 1 − X4 m∗4 , q8 1 X4 m∗4 , q12 1 X4 m∗ 4 , q16 X4 m∗4 , q20 m∗4 − X4 , q24 m∗ 4 − X4 , 1 2 2 ∗ k β∗ m1 1 X12 − m∗1 k2 c2 Ω2 2ikΩc , cs1 1 2 2 ∗ q26 k β∗ m4 1 X42 − m∗4 k2 c2 Ω2 2ikΩc , cs1 1 2 2 ∗ k β∗ m3 1 X32 − m∗3 k2 c2 Ω2 2ikΩc , q27 cs1 1 2 2 ∗ q28 k β∗ m4 1 X42 − m∗4 k2 c2 Ω2 2ikΩc , cs1 1 2 2 2 2 − m∗ 2ikΩc , q29 k2 β∗2 m∗ 1 1 X1 1 k c Ω cs1 q25 q30 1 2 2 ∗ 2 ∗ 2 2 2 k 1 X − m k 2ikΩc , β m c Ω ∗ 2 2 2 cs1 q31 1 2 2 ∗ 2 ∗ 2 2 2 k 1 X − m k 2ikΩc , β m c Ω ∗ 3 3 3 cs1 q32 1 2 2 ∗ 2 2 2 2 − m∗ 2ikΩc , 4 k c Ω k β∗ m4 1 X4 cs1 q33 MX1 k 2 m∗1 X12 1 2 2 ∗ 2 ∗ 2 2 2 1 k β∗ m1 1 X1 − m1 k c Ω 2ikΩc , ikcs1 32 Mathematical Problems in Engineering 1 2 2 ∗ q34 MX2 k2 m∗2 X22 1 k β∗ m2 1 X22 − m∗2 k2 c2 Ω2 2ikΩc , ikcs1 1 2 2 ∗ k β∗ m3 1 X32 − m∗3 k2 c2 Ω2 2ikΩc , q35 MX3 k2 m∗3 X32 1 ikcs1 1 2 2 ∗ 2 ∗ 2 2 ∗ 2 2 2 q36 MX4 k m4 X4 1 k β∗ m4 1 X4 − m4 k c Ω 2ikΩc , ikcs1 1 2 2 ∗ 2 2 2 ∗ 2 2 2 k β∗ m1 1 X1 − m1 k c Ω 2ikΩc , q37 M X1 k m1 X1 1 ikcs1 1 2 2 ∗ 2 2 2 ∗ 2 2 2 q38 M X2 k m2 X2 1 k β∗ m2 1 X2 − m2 k c Ω 2ikΩc , ikcs1 1 2 2 ∗ 2 2 2 ∗ 2 2 2 k β∗ m3 1 X3 − m3 k c Ω 2ikΩc , q39 M X3 k m3 X3 1 ikcs1 1 2 2 ∗ 2 2 2 ∗ 2 2 2 q40 M X4 k m4 X4 1 k β∗ m4 1 X4 − m4 k c Ω 2ikΩc , ikcs1 q41 Γ0 λ 1 − X1 m∗1 Γ0 λ 2μ X12 m∗1 X1 ρ −α2∗ 1 X12 c2 , q42 Γ0 λ 1 − X2 m∗2 Γ0 λ 2μ X22 m∗2 X2 ρ −α2∗ 1 X22 c2 , q43 Γ0 λ 1 − X3 m∗3 Γ0 λ 2μ X32 m∗3 X3 ρ −α2∗ 1 X32 c2 , q44 Γ0 λ 1 − X4 m∗4 Γ0 λ 2μ X42 m∗4 X4 ρ −α2∗ 1 X42 c2 , q45 Γ0 λ 1 X1 m∗1 Γ0 λ 2μ X12 − m∗1 X1 ρ −α2∗ 1 X12 c2 , q46 Γ0 λ 1 X2 m∗2 Γ0 λ 2μ X22 − m∗2 X2 ρ −α2∗ 1 X22 c2 , q47 Γ0 λ 1 X3 m∗3 Γ0 λ 2μ X32 − m∗3 X3 ρ −α2∗ 1 X32 c2 , q48 Γ0 λ 1 X4 m∗4 Γ0 λ 2μ X42 − m∗4 X4 ρ −α2∗ 1 X42 c2 , 2 2 X12 − m∗ c2 , q49 Γ0 λ 1 X1 m∗ 1 Γ0 λ 2μ 1 X1 ρ −α∗ 1 X1 2 ∗ 2 2 2 Γ λ X ρ −α 1 X c , 2μ − m X q50 Γ0 λ 1 X2 m∗ ∗ 2 0 2 2 2 2 2 2 2 q51 Γ0 λ 1 X3 m∗ X3 − m∗ c2 , 3 Γ0 λ 2μ 3 X3 ρ −α∗ 1 X3 2 2 X42 − m∗ c2 , q52 Γ0 λ 1 X4 m∗ 4 Γ0 λ 2μ 4 X4 ρ −α∗ 1 X4 F q53 −2k2 Γ0 μX1 − k2 Γ0 μm∗1 1 − X12 k2 β∗2 m∗1 1 X12 − m∗1 k2 c2 Ω2 2ikΩc , s1 F k2 β∗2 m∗2 1 X22 − m∗2 k2 c2 Ω2 2ikΩc , q54 −2k2 Γ0 μX2 − k2 Γ0 μm∗2 1 − X22 s1 Mathematical Problems in Engineering 33 F q55 −2k2 Γ0 μX3 − k2 Γ0 μm∗3 1 − X32 k2 β∗2 m∗3 1 X32 − m∗3 k2 c2 Ω2 2ikΩc , s1 F k2 β∗2 m∗4 1 X42 − m∗4 k2 c2 Ω2 2ikΩc , q56 −2k2 Γ0 μX4 − k2 Γ0 μm∗4 1 − X42 s1 F k2 β∗2 m∗1 1 X12 − m∗1 k2 c2 Ω2 2ikΩc , q57 2k2 Γ0 μX1 − k2 Γ0 μm∗1 1 − X12 s1 F q58 2k2 Γ0 X2 − k2 Γ0 μm∗2 1 − X22 k2 β∗2 m∗2 1 X22 − m∗2 k2 c2 Ω2 2ikΩc , s1 F k2 β∗2 m∗3 1 X32 − m∗3 k2 c2 Ω2 2ikΩc , q59 2k2 Γ0 μX3 − k2 Γ0 μm∗3 1 − X32 s1 F k2 β∗2 m∗4 1 X42 − m∗4 k2 c2 Ω2 2ikΩc , q60 2k2 Γ0 μX4 − k2 Γ0 μm∗4 1 − X42 s1 F 2 2 2 2 2 q61 2k2 Γ0 μ X1 − k2 Γ0 μ m∗ k2 β∗2 m∗ − m∗ 2ikΩc , 1 1 − X1 1 1 X1 1 k c Ω s1 F 2 2 2 2 2 k2 β∗2 m∗ − m∗ 2ikΩc , q62 2k2 Γ0 μ X2 − k2 Γ0 μ m∗ 2 1 − X2 2 1 X2 2 k c Ω s1 F 2 2 2 ∗ 2 ∗ 2 2 2 q63 2k2 Γ0 μ X3 − k2 Γ0 μ m∗ 1 − X k 1 X − m k 2ikΩc , β m c Ω ∗ 3 3 3 3 3 s1 F 2 2 2 2 2 q64 2k2 Γ0 μ X4 − k2 Γ0 μ m∗ k2 β∗2 m∗ − m∗ 2ikΩc , 4 1 − X4 4 1 X4 4 k c Ω s1 ρ 2 2 2 ρ 2 2 2 q65 q66 −α∗ k X1 1 k2 c2 , −α∗ k X2 1 k2 c2 , γ γ ρ ρ 2 2 2 −α2∗ k2 X32 1 k2 c2 , −α∗ k X4 1 k2 c2 , q68 q67 γ γ q69 ρ 2 2 2 −α∗ k X1 1 k2 c2 , γ ρ 2 2 2 −α∗ k X3 1 k2 c2 , γ ρ q73 −α2∗ k2 X12 1 k2 c2 ikX1 , γ ρ q75 −α2∗ k2 X32 1 k2 c2 ikX3 , γ −ρ 2 2 2 q77 −α∗ k X1 1 k2 c2 ikX1 , γ −ρ 2 2 2 −α∗ k X3 1 k2 c2 ikX3 , q79 γ q71 q81 −ρ 2 2 2 2 2 −α X ikX1 , k 1 k c ∗ 1 γ q70 q72 q74 q76 q78 q80 q82 ρ 2 2 2 −α∗ k X2 1 k2 c2 , γ ρ 2 2 2 −α∗ k X4 1 k2 c2 , γ ρ 2 2 2 −α∗ k X2 1 k2 c2 ikX2 , γ ρ 2 2 2 −α∗ k X4 1 k2 c2 ikX4 , γ −ρ 2 2 2 −α∗ k X2 1 k2 c2 ikX2 , γ −ρ 2 2 2 −α∗ k X4 1 k2 c2 ikX4 , γ −ρ 2 2 2 2 2 −α X ikX2 , k 1 k c ∗ 2 γ 34 Mathematical Problems in Engineering −ρ 2 2 2 −ρ 2 2 2 2 2 −α X ikX −α∗ k X3 1 k2 c2 ikX3 , k 1 k c , q 84 ∗ 3 3 γ γ 1 2 2 ∗ 2 ∗ 2 2 ∗ 2 2 2 k β∗ m1 1 X1 − m1 k c Ω 2ikΩc , MX1 k m1 X1 1 ikcs1 1 2 2 ∗ 2 ∗ 2 2 ∗ 2 2 2 MX2 k mj X2 1 k β∗ m2 1 X2 − m2 k c Ω 2ikΩc , ikcs1 1 2 2 ∗ 2 ∗ 2 2 ∗ 2 2 2 k β∗ m3 1 X3 − m3 k c Ω 2ikΩc , MX3 k mj X3 1 ikcs1 1 2 2 ∗ 2 ∗ 2 2 ∗ 2 2 2 k β∗ m4 1 X4 − m4 k c Ω 2ikΩc , MX4 k m4 X4 1 ikcs1 q89 Γ0 λ 1 − X1 m∗1 Γ0 λ 2μ X12 m∗1 X1 ρ −α2∗ 1 X12 c2 , q90 Γ0 λ 1 − X2 m∗2 Γ0 λ 2μ X22 m∗2 X2 ρ −α2∗ 1 X22 c2 , q91 Γ0 λ 1 − X3 m∗3 Γ0 λ 2μ X32 m∗3 X3 ρ −α2∗ 1 X32 c2 , q92 Γ0 λ 1 − X4 m∗4 Γ0 λ 2μ X42 m∗4 X4 ρ −α2∗ 1 X42 c2 , q83 q85 q86 q87 q88 q93 Γ0 λ 1 X1 m∗1 Γ0 λ 2μ X12 − m∗1 X1 ρ −α2∗ 1 X12 c2 , q94 Γ0 λ 1 X2 m∗2 Γ0 λ 2μ X22 − m∗2 X2 ρ −α2∗ 1 X22 c2 , q95 Γ0 λ 1 X3 m∗3 Γ0 λ 2μ X32 − m∗3 X3 ρ −α2∗ 1 X32 c2 , q96 Γ0 λ 1 X4 m∗4 Γ0 λ 2μ X42 − m∗4 X4 ρ −α2∗ 1 X42 c2 , F q97 −2k2 Γ0 μX1 − k2 Γ0 μm∗1 1 − X12 k2 β∗2 m∗1 1 X12 − m∗1 k2 c2 Ω2 2ikΩc , s1 F k2 β∗2 m∗2 1 X22 − m∗2 k2 c2 Ω2 2ikΩc , q98 −2k2 Γ0 μX2 − k2 Γ0 μm∗2 1 − Xj2 s1 F q99 −2k2 Γ0 μX3 − k2 Γ0 μm∗3 1 − X32 k2 β∗2 m∗3 1 X32 − m∗3 k2 c2 Ω2 2ikΩc , s1 F k2 β∗2 m∗4 1 X42 − m∗4 k2 c2 Ω2 2ikΩc , q100 −2k2 Γ0 μX4 − k2 Γ0 μm∗4 1 − X42 s1 F k2 β∗2 m∗1 1 X12 − m∗1 k2 c2 Ω2 2ikΩc , q101 2k2 Γ0 μX1 − k2 Γ0 μm∗1 1 − X12 s1 F k2 β∗2 m∗2 1 X22 − m∗2 k2 c2 Ω2 2ikΩc , q102 2k2 Γ0 μX2 − k2 Γ0 μm∗2 1 − X22 s1 F q103 2k2 Γ0 μX3 − k2 Γ0 μm∗3 1 − X32 k2 β∗2 m∗3 1 X32 − m∗3 k2 c2 Ω2 2ikΩc , s1 F k2 β∗2 m∗4 1 X42 − m∗4 k2 c2 Ω2 2ikΩc , q104 2k2 Γ0 μX4 − k2 Γ0 μm∗4 1 − X42 s1 Mathematical Problems in Engineering q105 −α2∗ k2 X12 1 k2 c2 ikX1 , 35 q106 −α2∗ k2 X22 1 k2 c2 ikX2 , q107 −α2∗ k2 X32 1 k2 c2 ikX3 , q108 −α2∗ k2 X42 1 k2 c2 ikX4 , q109 α2∗ k2 X12 1 − k2 c2 ikX1 , q110 α2∗ k2 X22 1 − k2 c2 ikX2 , q111 α2∗ k2 X32 1 − k2 c2 ikX3 , q112 α2∗ k2 X42 1 − k2 c2 ikX4 . 5.31 From 5.30, we can determine by numerical effects the initial stress, gravity field, friction coefficient, magnetic field, and rotation, for a computation using the maple program; we use sandstone as a granular medium and nephiline as a granular layer taking into consideration that the relaxation times τ0 0.1, τ1 0.4, and τ2 0.5, the friction coefficient F 0.4, and the third elastic constant M 0.2. i Effects of the initial stress, gravity field, friction coefficient, magnetic field, relaxation time, and rotation are discussed in Figures 2 and 3. ii From 5.30, if the initial stress are neglected, we can discuss the effects of the gravity field, friction coefficient, magnetic field, relaxation time, and rotation, and the discussion is clear up from Figure 4. iii From 5.30, if the initial stress and magnetic field are neglected, we can discuss the effects of the gravity field, friction coefficient, relaxation time and rotation, and the discussion is clear up from Figure 5. iv From 5.30, if the initial stress, magnetic field, and gravity field are neglected, we can discuss the effects of the friction coefficient, relaxation time, and rotation, and the discussion is clear up from Figure 6. v From 5.30, if the initial stress, magnetic field, and gravity field are neglected and there is uncoupling between the temperature and strain field, we can discuss the effects the friction coefficient, relaxation time, rotation, and the discussion is clear up from Figure 7. 6. Numerical Results and Discussion In order to illustrate theoretical results obtained in the proceeding section, we now present some numerical results. The material chosen for this purpose of Carbon steel, the physical data is given 21 as follows: ρ 2 kgm−3 , λ 9.3 × 1010 Nm−1 , K 50 Wm−1 k−1 , μ 8.4 × 1010 Nm−1 , s 6.4 × 102 JKg−1 , T0 293.1 k, αt 13.2 × 10−6 deg−1 . 6.1 6.1. Effects of the Initial Stress, Gravity Field, Friction Coefficient, Magnetic Field, Relaxation Time, and Rotation Figure 2 shows the velocity of Rayleigh waves Re and attenuation coefficient Im under the effect of gravity field, friction coefficient, magnetic field, relaxation time, and rotation with respect to the initial stress; we found that the velocity of Rayleigh waves Re and attenuation 36 Mathematical Problems in Engineering 5E+21 1.6E+21 −5E+21 0 −1E+22 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 × 1011 P −1.5E+22 −2E+22 −2.5E+22 −3E+22 −3.5E+22 1.4E+21 Attenuation coefficient Rayleigh wave velocity 0E+00 1.2E+21 1E+21 8E+20 6E+20 4E+20 2E+20 −4E+22 0E+00 −4.5E+22 −2E+20 H0 = 105 H0 = 2 × 105 4E+29 2E+29 2E+29 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 × 1011 P −6E+29 −8E+29 −1E+30 Attenuation coefficient Rayleigh wave velocity 0 −4E+29 −2E+29 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 × 1011 P −6E+29 −8E+29 −1E+30 −1.2E+30 −1.4E+30 −1.4E+30 −1.6E+30 −1.6E+30 Ω = 0.5 Ω = 0.6 0 −4E+29 −1.2E+30 Ω = 0.5 Ω = 0.6 Ω = 0.7 Ω = 0.7 4E+19 1E+23 9E+22 2E+19 8E+22 7E+22 Attenuation coefficient Rayleigh wave velocity H0 = 4 × 105 0E+00 0E+00 6E+22 5E+22 4E+22 3E+22 2E+22 1E+22 0E+00 0 −2E+19 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 × 1011 P −4E+19 −6E+19 −8E+19 0E+00 −1E+22 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 × 1011 P H0 = 105 H0 = 2 × 105 H0 = 4 × 105 4E+29 −2E+29 0 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 × 1011 P g = 0.1 g = 0.15 −1E+20 g = 0.2 Figure 2: Continued. g = 0.1 g = 0.15 g = 0.2 Mathematical Problems in Engineering 37 5E−02 1E−01 0E+00 0 −1E−01 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 × 1011 P −2E−01 −3E−01 −4E−01 Attenuation coefficient Rayleigh wave velocity 0E+00 −5E−02 −1.5E−01 −2E−01 −2.5E−01 −3E−01 −6E−01 −3.5E−01 τ1 = 0.5 τ1 = 0.3 τ1 = 0.4 6E+11 5E+10 5E+11 0E+00 4E+11 −5E+10 Attenuation coefficient Rayleigh wave velocity 0 3E+11 2E+11 1E+11 τ1 = 0.5 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 × 1011 P −1E+11 −1.5E+11 −2E+11 −2.5E+11 0E+00 0 −1E+11 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 × 1011 P −1E−01 −5E−01 τ1 = 0.3 τ1 = 0.4 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 × 1011 P K = 0.1 K = 0.2 K = 0.3 −3E+11 K = 0.1 K = 0.2 K = 0.3 Figure 2: Effects of H0 , Ω, g, τ1 , and p on Rayleigh wave velocity and attenuation coefficient with respect to the initial stress. coefficient Im increased with increasing values of p and H0 , and the velocity of Rayleigh waves Re and attenuation coefficient Im decreased and increased with increasing values of g and K, respectively; while the values of Re and Im take one curve at another value of the relaxation time τ1 increased with increasing values of initial stress P . Figure 3 shows the velocity of Rayleigh waves Re and attenuation coefficient Im under effect of initial stress, gravity field, friction coefficient, magnetic field, relaxation time and rotation with respect to the wave number, we find that the velocity of Rayleigh waves Re and attenuation coefficient Im decreased and increased with increasing values of H0 , respectively, and the velocity of Rayleigh waves Re and attenuation coefficient Im increased and decreased with increasing values of Ω and g, respectively; also, the values of Re and Im increased with increasing values of K, while the values of Re and Im take one curve at another value of the relaxation time τ1 , decreased with increasing values of wave number k. 38 Mathematical Problems in Engineering 8E+32 1.5E+33 6E+32 Rayleigh wave velocity 1E+33 5E+32 0E+00 −5E+32 0 0.05 0.1 0.15 0.2 0.25 0.3 k 0.35 ×10−20 −1E+33 Attenuation coefficient 2E+33 4E+32 2E+32 0E+00 −2E+32 0.05 0.1 0.15 0.2 0.3 0.35 ×10−20 −6E+32 −8E+32 −2E+33 −1E+33 H0 = 105 H0 = 2 × 105 H0 = 4 × 105 1E+39 0.25 k −4E+32 −1.5E+33 H0 = 105 H0 = 2 × 105 0 H0 = 4 × 105 1E+40 0E+00 0 0.05 0.1 0.15 0.2 0.25 0.3 k −2E+39 0.35 ×10−20 −3E+39 −4E+39 −5E+39 −6E+39 −7E+39 8E+39 Attenuation coefficient Rayleigh wave velocity −1E+39 2E+39 0 0.05 0.1 0.15 Ω = 0.7 Ω = 0.5 Ω = 0.6 0.2 0.25 0.3 k −2E+39 −9E+39 0.35 ×10−20 Ω = 0.7 Ω = 0.5 Ω = 0.6 4E+37 5E+37 3.5E+37 0 0.05 0.1 0.15 0.2 0.25 0.3 k −1E+38 −1.5E+38 −2E+38 0.35 ×10−20 Attenuation coefficient 0E+00 Rayleigh wave velocity 4E+39 0E+00 −8E+39 −5E+37 6E+39 3E+37 2.5E+37 2E+37 1.5E+37 1E+37 5E+36 −2.5E+38 0E+00 −3E+38 −5E+36 g = 0.1 g = 0.15 g = 0.2 Figure 3: Continued. 0 0.05 0.1 0.2 0.15 0.25 0.3 k g = 0.1 g = 0.15 g = 0.2 0.35 ×10−20 39 2.5E+14 4E+14 2E+14 3.5E+14 1.5E+14 1E+14 5E+13 0E+00 −5E+13 0 0.05 0.1 0.15 0.2 0.25 0.3 k 0.35 ×10−20 Attenuation coefficient Rayleigh wave velocity Mathematical Problems in Engineering 1E+14 5E+13 −5E+13 K = 0.1 K = 0.2 0.05 0.1 0.15 0.2 0.25 0.3 k K = 0.1 K = 0.2 0.35 ×10−20 K = 0.3 9E+08 8E+08 Attenuation coefficient 5E+08 4E+08 3E+08 2E+08 1E+08 0E+00 0 0.05 0.1 0.15 −1E+08 0.2 0.25 0.3 k τ1 = 0.3 τ1 = 0.4 7E+08 6E+08 5E+08 4E+08 3E+08 2E+08 1E+08 0E+00 0.35 ×10−20 −1E+08 0 τ1 = 0.5 0.05 0.1 0.15 7E+32 7E+31 Attenuation coefficient 8E+31 6E+32 5E+32 4E+32 3E+32 2E+32 1E+32 0.2 k τ1 = 0.3 τ1 = 0.4 8E+32 0.25 0.3 0.35 ×10−20 τ1 = 0.5 6E+31 5E+31 4E+31 3E+31 2E+31 1E+31 0E+00 0E+00 −1E+32 0 K = 0.3 6E+08 Rayleigh wave velocity 2E+14 1.5E+14 0E+00 −1E+14 Rayleigh wave velocity 3E+14 2.5E+14 0 0.05 0.1 0.2 0.15 k P = 1 × 1011 P = 1.4 × 1011 0.25 0.3 0.35 ×10−20 P = 1.6 × 1011 −1E+31 0 0.05 0.1 0.15 0.2 k P = 1 × 1011 P = 1.4 × 1011 0.25 0.3 0.35 ×10−20 P = 1.6 × 1011 Figure 3: Effects of H0 , Ω, g, τ1 , and K, P on Rayleigh wave velocity and Attenuation coefficient with respect to the wave number. 6.2. If the Initial Stresses Are Neglected Figure 4 shows the velocity of Rayleigh waves Re and attenuation coefficient Im under effect of gravity field, friction coefficient, magnetic field, relaxation time, and rotation with respect to the wave number, we find that the velocity of Rayleigh waves Re and attenuation 40 Mathematical Problems in Engineering 2E+40 1E+39 0 0.05 0.1 0.15 0.2 0.25 0.3 k −4E+40 0.35 ×10−20 −6E+40 −8E+40 −1E+41 −1.2E+41 −1.4E+41 0E+00 Attenuation coefficient Rayleigh wave velocity 0E+00 −2E+40 0 0.05 0.1 0.15 −1E+39 0.2 0.25 0.3 k 0.35 ×10−20 −2E+39 −3E+39 −4E+39 −5E+39 −1.6E+41 −1.8E+41 −6E+39 H0 = 105 H0 = 2 × 105 H0 = 105 H0 = 2 × 105 H0 = 4 × 105 5E+41 H0 = 4 × 105 2E+38 0E+00 0 0.05 0.1 0.15 0.2 0.25 0.3 k 0.35 ×10−20 1E+38 Attenuation coefficient Rayleigh wave velocity −5E+41 −1E+42 −1.5E+42 −2E+42 −2.5E+42 −3E+42 −3.5E+42 0E+00 0 0.05 0.1 0.15 0.2 0.25 0.3 k −1E+38 0.35 ×10−20 −2E+38 −3E+38 −4E+42 −4.5E+42 −4E+38 Ω = 0.7 Ω = 0.5 Ω = 0.6 2E+49 5E+49 0E+00 0.05 0.1 0.15 0.2 0.25 0.3 k −5E+49 −1E+50 −1.5E+50 −2E+50 0.35 ×10−20 0E+00 0 Attenuation coefficient 0 Rayleigh wave velocity Ω = 0.7 Ω = 0.5 Ω = 0.6 0.05 0.1 0.15 0.2 0.25 0.3 k −2E+49 −4E+49 −6E+49 −8E+49 −2.5E+50 −1E+50 −3E+50 g = 0.1 g = 0.15 g = 0.2 Figure 4: Continued. g = 0.1 g = 0.15 g = 0.2 0.35 ×10−20 Mathematical Problems in Engineering 41 0E+00 1.76E+59 0 0.05 0.1 0.15 0.2 0.25 0.3 k −4E+79 0.35 ×10−20 −1E+74 Attenuation coefficient Attenuation coefficient −2E+79 −6E+79 −8E+79 −1E+80 −1.2E+80 −1.4E+80 0.1 0.15 0.2 0.3 0.35 ×10−20 −4E+74 −5E+74 −6E+74 −7E+74 −8E+74 −9E+74 −1E+75 τ1 = 0.5 τ1 = 0.3 τ1 = 0.4 2.5E+27 0.25 k −3E+74 −1.8E+80 τ1 = 0.5 1E+24 0E+00 2E+27 0 Attenuation coefficient Rayleigh wave velocity 0.05 −2E+74 −1.6E+80 τ1 = 0.3 τ1 = 0.4 0 1.5E+27 1E+27 5E+26 0E+00 0 0.05 0.1 0.15 0.2 0.25 0.3 k −5E+26 K = 0.1 K = 0.2 K = 0.3 0.35 ×10−20 0.05 0.1 0.15 −1E+24 0.2 0.25 0.3 k 0.35 ×10−20 −2E+24 −3E+24 −4E+24 −5E+24 −6E+24 −7E+24 K = 0.1 K = 0.2 K = 0.3 Figure 4: Effects of H0 , Ω, g, τ1 , and K on Rayleigh wave velocity and attenuation coefficient with respect to the wave number. coefficient Im decreased with increasing values of H0 and Ω, while that contrary with increasing values of g; also, the values of Re and Im increased and decreased with increasing values of K, respectively, while the values of Re and Im take one curve at another value of the relaxation time τ1 decreased, then increased with increasing values of wave number k. 6.3. If the Initial Stresses and Magnetic Field Are Neglected Figure 5 shows that the velocity of Rayleigh waves Re and attenuation coefficient Im under effect of gravity field, friction coefficient, relaxation time, and rotation with respect to the wave number; we find that the velocity of Rayleigh waves Re and attenuation coefficient Im decreased and increased with increasing values of Ω, and the values of Re and Im increased with increasing values of g, while that contrary with increasing values of K; also, the 42 Mathematical Problems in Engineering 3.5E+42 1E+45 0E+00 0 0.05 0.1 0.15 0.2 0.25 0.3 k −2E+45 3E+42 0.35 ×10−20 Attenuation coefficient Rayleigh wave velocity −1E+45 −3E+45 −4E+45 −5E+45 −6E+45 −7E+45 1.5E+42 1E+42 5E+41 0E+00 −9E+45 −5E+41 0 0.1 0.15 0.2 0.25 0.3 0.35 ×10−20 Ω = 0.7 Ω = 0.5 Ω = 0.6 1E+51 0E+00 0E+00 0.05 0.1 0.15 0.2 0.25 0.3 k −1E+52 0.35 ×10−20 −2E+52 −3E+52 −4E+52 0 Attenuation coefficient 0 0.1 0.15 0.2 0.3 0.35 ×10−20 −3E+51 −4E+51 −5E+51 −6E+52 −7E+51 g = 0.1 g = 0.15 g = 0.2 1.6E+91 0.25 k −2E+51 −6E+51 g = 0.1 g = 0.15 0.05 −1E+51 −5E+52 g = 0.2 1E+80 0E+00 1.4E+91 −1E+80 Attenuation coefficient 1.2E+91 1E+91 8E+90 6E+90 4E+90 2E+90 0 0.05 0.1 0.15 0.2 0.25 0.3 k −2E+80 −3E+80 −4E+80 −5E+80 −6E+80 −7E+80 −8E+80 0E+00 −2E+90 0.05 k Ω = 0.7 1E+52 Rayleigh wave velocity 2E+42 −8E+45 Ω = 0.5 Ω = 0.6 Rayleigh wave velocity 2.5E+42 0 0.05 0.1 0.15 0.2 0.25 0.3 k τ1 = 0.3 τ1 = 0.4 0.35 ×10−20 −9E+80 −1E+81 τ1 = 0.5 Figure 5: Continued. τ1 = 0.3 τ1 = 0.4 τ1 = 0.5 0.35 ×10−20 Mathematical Problems in Engineering 43 2E+75 5E+73 0E+00 −5E+73 0 0.05 0.1 0.15 0.2 0.25 0.3 k −1E+74 −1.5E+74 −2E+74 −2.5E+74 −3E+74 0.35 ×10−20 −2E+75 Attenuation coefficient Rayleigh wave velocity 0E+00 0.1 0.15 0.2 0.25 0.3 k 0.35 ×10−20 −6E+75 −8E+75 −1E+76 −1.2E+76 −1.4E+76 −1.6E+76 −4E+74 −1.8E+76 K = 0.3 0.05 −4E+75 −3.5E+74 K = 0.1 K = 0.2 0 K = 0.1 K = 0.2 K = 0.3 Figure 5: Effects of Ω, g, τ1 , and K on Rayleigh wave velocity and attenuation coefficient with respect to the wave number. values of Re and Im take one curve at another value of the relaxation time τ1 , increased, then decreased with increasing values of wave number k. 6.4. If the Initial Stresses, Magnetic Field, and Gravity Field Are Neglected Figure 6 shows the velocity of Rayleigh waves Re and attenuation coefficient Im under the effect of friction coefficient, relaxation time, and rotation with respect to the wave number; we find that the velocity of Rayleigh waves Re and attenuation coefficient Im decreased and increased with increasing Ω, and the values of Re and Im decreased with increasing values of K, while the values of Re and Im take one curve at another value of the relaxation time τ1 , decreased and increased with increasing values of the wave number k, respectively. 6.5. If the Initial Stresses, Magnetic Field, and Gravity Field Are Neglected and There Is Uncoupling between the Temperature and Strain Field Figure 7 shows the velocity of Rayleigh waves Re and attenuation coefficient Im under the effect of friction coefficient, relaxation time, and rotation with respect to the wave number; we find that the velocity of Rayleigh waves Re and attenuation coefficient Im increased and decreased with increasing of Ω, respectively, while that contrary with increasing values of K; finally, the values of Re and Im take one curve at another value of the relaxation time τ1 , decreased with increasing, the values of the wave number k. 7. Conclusions The problem of the Rayleigh waves in generalized magneto-thermo-viscoelastic granular medium under the influence of rotation, gravity field, and initial stress is considered, and the frequency equation of the wave motion in the explicit form is derived, by considering 44 Mathematical Problems in Engineering 1E+55 5E+54 0E+00 0.05 0.1 0.15 0.2 0.25 0.3 k 0.35 ×10−20 −1E+55 −1.5E+55 −2E+55 −2.5E+55 0E+00 0 Attenuation coefficient Rayleigh wave velocity 0 −5E+54 0.05 0.1 0.15 0.2 0.25 0.3 k −1E+55 0.35 ×10−20 −2E+55 −3E+55 −4E+55 −3E+55 −3.5E+55 −5E+55 Ω = 0.7 Ω = 0.5 Ω = 0.6 Ω = 0.7 Ω = 0.5 Ω = 0.6 1.6E+19 1E+18 0E+00 1.2E+19 Attenuation coefficient Rayleigh wave velocity 1.4E+19 1E+19 8E+18 6E+18 4E+18 2E+18 0.05 0.1 0.15 0.2 0.25 0.3 k 0.35 ×10−20 −2E+18 −3E+18 −4E+18 0E+00 −2E+18 0 −1E+18 0 0.05 0.1 0.15 0.2 0.25 0.3 k τ1 = 0.3 τ1 = 0.4 0.35 ×10−20 −5E+18 τ1 = 0.3 τ1 = 0.4 τ1 = 0.5 2E+25 τ1 = 0.5 2.5E+24 −2E+25 0 0.05 0.1 0.15 0.2 0.25 0.3 k −4E+25 −6E+25 −8E+25 −1E+26 −1.2E+26 0.35 ×10−20 2E+24 Attenuation coefficient Rayleigh wave velocity 0E+00 1.5E+24 1E+24 5E+23 0E+00 −1.4E+26 0 −1.6E+26 0.05 0.1 K = 0.1 K = 0.2 K = 0.3 0.15 0.2 0.25 0.3 k −5E+23 K = 0.1 K = 0.2 0.35 ×10−20 K = 0.3 Figure 6: Effects of Ω, τ1 , and K on Rayleigh wave velocity and attenuation coefficient with respect to the wave number. Mathematical Problems in Engineering 45 5E+285 2E+287 0E+00 −2E+287 Attenuation coefficient Rayleigh wave velocity 4E+285 3E+285 2E+285 1E+285 0.05 0.1 0.15 0.2 0.25 0.3 k −1E+285 0.1 0.15 0.2 0.25 0.3 k 0.35 ×10−20 −6E+287 −8E + 287 −1E+288 −1.2E+288 −1.4E+288 0.35 ×10−20 −1.6E+288 Ω = 0.7 Ω = 0.5 Ω = 0.6 0.05 −4E+287 0E+00 0 0 Ω = 0.7 Ω = 0.5 Ω = 0.6 4E+284 2.5E+281 3.5E+284 Attenuation coefficient Rayleigh wave velocity 2E+281 1.5E+281 1E+281 5E+280 0E+00 0 0.05 0.1 0.15 0.2 0.25 0.3 k −5E+280 τ1 = 0.3 τ1 = 0.4 2.5E+284 2E+284 1.5E+284 1E+284 5E+283 0E+00 0.35 ×10−20 −5E+283 0 0.05 0.1 0.15 0.2 0.25 0.3 k τ1 = 0.5 τ1 = 0.3 τ1 = 0.4 0.35 ×10−20 τ1 = 0.5 1.4E+302 5E+303 1.2E+302 0 0.05 0.1 −5E+303 0.15 0.2 0.25 0.3 k −1E+304 −1.5E+304 −2E+304 0.35 ×10−20 Attenuation coefficient 0E+00 Rayleigh wave velocity 3E+284 1E+302 8E+301 6E+301 4E+301 2E+301 −2.5E+304 0E+00 −3E+304 −2E+301 K = 0.1 K = 0.2 K = 0.3 0 0.05 0.1 0.15 0.2 k K = 0.1 K = 0.2 0.25 0.3 0.35 ×10−20 K = 0.3 Figure 7: Effects of Ω, τ1 , and K on Rayleigh wave velocity and attenuation coefficient with respect to the wave number. 46 Mathematical Problems in Engineering various special cases. The numerical results are obtained for carbon-steel material, although the effect of the rotation, magnetic field, relaxation times, initial stress, gravity field, and friction coefficient is observed to be quite large on wave propagation of Rayleigh wave velocity Re and attenuation coefficient Im. The problem of the Rayleigh waves in generalized magneto-thermo-viscoelastic granular medium under the influence of rotation, gravity field, and initial stress is considered, and the frequency equation of the wave motion in the explicit form is derived, by considering various special cases. The numerical results are obtained for carbon-steel material, although the effect of the rotation, magnetic field, relaxation times, initial stress, gravity field, and friction coefficient is observed to be quite large on wave propagation of Rayleigh wave velocity Re and attenuation coefficient Im. It is easy to see that the values of Re and Im with respect to the initial stress are increased with increasing values of Ω, while that contrary if the initial stress are neglected and with respect to the wave number; also, if the initial stress are constant with respect to the wave number the values of Re and Im increased and decreased with increasing values of Ω, respectively, and if the initial stress and the magnetic field are neglected, the values of Re and Im decreased and increased with increasing values of Ω, respectively, while that contrary if P, H0 , g, θ, and ε are neglected and with respect to the wave number; finally, if P, H0 , and g are neglected and with respect to the wave number, the values of Re and Im increased with increasing values of Ω. It is easy to see that the values of Re and Im with respect to the initial stress are decreased and increased with increasing values of g, respectively, while that contrary if the initial stress are constant and with respect to the wave number; also, if the initial stress are neglected and if the initial stress and the magnetic field are neglected with respect to the wave number, the values of Re and Im increased with increasing values of g. It is easy to see that the values of Re and Im with respect to the initial stress are decreased and increased with increasing values of K, respectively, while that contrary if the initial stress are neglected and with respect to the wave number; also, if the initial stress and the magnetic field are neglected and if P, H0 , and g are neglected with respect the wave number, the values of Re and Im decreased with increasing values of K; finally, if P, H0 , g, θ, and ε are neglected and with respect to the wave number, the values of Re and Im decreased and increased with increasing values of K. Finally, the frequency equation has been discussed under effect of rotation, gravity field, and initial stress and in case of various classical and nonclassical theories of thermoelasticity. The results indicate that the effect of rotation, magnetic field, initial stress, and gravity field is very pronounced. The frequency equations derived in this paper may be useful in practical applications. It is concluded from the above analyses and results that the present solution is accurate and reliable and the method is simple and effective. So it may be as a reference to solve other problems of Rayleigh waves in generalized magnetothermoelastic granular medium. References 1 N. Oshima, “A symmetrical stress tensor and its application to a granular medium,” in Proceedings of the 3 rd Japan National congress for Applied Mechanics, vol. 77, pp. 77–83, 1955. 2 A. M. El-Naggar, “On the dynamical problem of a generalized thermoelastic granular infinite cylinder under initial stress,” Astrophysics and Space Science, vol. 190, no. 2, pp. 177–190, 1992. Mathematical Problems in Engineering 47 3 N. C. Dawan and S. K. Chakraporty, “On Rayleigh waves in Green-Lindsay model of generalized thermoelastic media,” Indian Journal Pure and Applied Mathematics, vol. 20, pp. 276–283, 1998. 4 A. M. Abd-Alla, H. A. H. Hammad, and S. M. Abo-Dahab, “Rayleigh waves in a magnetoelastic halfspace of orthotropic material under influences of initial stress and gravity field,” Applied Mathematics and Computation, vol. 154, no. 2, pp. 583–597, 2004. 5 A. M. El-Naggar, A. M. Abd-Alla, and S. M. Ahmed, “Rayleigh waves in a magnetoelastic initially stressed conducting medium with the gravity field,” Bulletin of the Calcutta Mathematical Society, vol. 86, no. 3, pp. 243–248, 1994. 6 S. M. Ahmed, “Rayleigh waves in a thermoelastic granular medium under initial stress,” International Journal of Mathematics and Mathematical Sciences, vol. 23, no. 9, pp. 627–637, 2000. 7 A. M. Abd-Alla and S. M. Ahmed, “Rayleigh waves in an orthotropic thermoelastic medium under gravity and initial stress,” Earth, Moon and Planets, vol. 75, pp. 185–197, 1998. 8 A. M. Abd-Alla and S. R. Mahmoud, “Magneto-thermoelastic problem in rotating non-homogeneous orthotropic hollow cylinder under the hyperbolic heat conduction model,” Meccanica, vol. 45, no. 4, pp. 451–462, 2010. 9 M. Venkatesan and P. Ponnusamy, “Wave propagation in a generalized thermoelastic solid cylinder of arbitrary cross-section immersed in a fluid,” International Journal of Mechanical Sciences, vol. 49, no. 6, pp. 741–751, 2007. 10 S. K. Roychoudhuri and N. Bandyopadhyay, “Thermoelastic wave propagation in a rotating elastic medium without energy dissipation,” International Journal of Mathematics and Mathematical Sciences, no. 1, pp. 99–107, 2005. 11 J. N. Sharma and D. Grover, “Body wave propagation in rotating thermoelastic media,” Mechanics Research Communications, vol. 36, no. 6, pp. 715–721, 2009. 12 A. M. El-Naggar, A. M. Abd-Alla, M. A. Fahmy, and S. M. Ahmed, “Thermal stresses in a rotating non-homogeneous orthotropic hollow cylinder,” Heat and Mass Transfer, vol. 39, no. 1, pp. 41–46, 2002. 13 M. R. Abd-El-Salam, A. M. Abd-Alla, and H. A. Hosham, “A numerical solution of magnetothermoelastic problem in non-homogeneous isotropic cylinder by the finite-difference method,” Applied Mathematical Modelling, vol. 31, no. 8, pp. 1662–1670, 2007. 14 S. Mukhopadhyay, “Effects of thermal relaxations on thermoviscoelastic interactions in an unbounded body with a spherical cavity subjected to a periodic loading on the boundary,” Journal of Thermal Stresses, vol. 23, no. 7, pp. 675–684, 2000. 15 A. M. Abd-Alla, “Propagation of Rayleigh waves in an elastic half-space of orthotropic material,” Applied Mathematics and Computation, vol. 99, no. 1, pp. 61–69, 1999. 16 Masa. Tanaka, T. Matsumoto, and M. Moradi, “Application of boundary element method to 3-D problems of coupled thermoelasticity,” Engineering Analysis with Boundary Elements, vol. 16, no. 4, pp. 297–303, 1995. 17 W. Nowacki, Thermoelasticity, Addison-Wesley, London, UK, 1962. 18 M. A. Biot, Mechanics of Incremental Deformations. Theory of Elasticity and Viscoelasticity of Initially Stressed Solids and Fluids, Including Thermodynamic Foundations and Applications to Finite Strain, John Wiley & Sons, New York, NY, USA, 1965. 19 P. M. Morse and H. Feshbach, Methods of Theoretical Physics, McGraw-Hill, New York, NY, USA, 1953. 20 A. M. Abd-Alla, S. M. Abo-Dahab, H. A. Hammad, and S. R. Mahmoud, “On generalized magnetothermoelastic rayleigh waves in a granular medium under the influence of a gravity field and initial stress,” Journal of Vibration and Control, vol. 17, no. 1, pp. 115–128, 2011. 21 J. N. Sharma and M. Pal, “Rayleigh-Lamb waves in magneto-thermoelastic homogeneous isotropic plate,” International Journal of Engineering Science, vol. 42, no. 2, pp. 137–155, 2004. Advances in Operations Research Hindawi Publishing Corporation http://www.hindawi.com Volume 2014 Advances in Decision Sciences Hindawi Publishing Corporation http://www.hindawi.com Volume 2014 Mathematical Problems in Engineering Hindawi Publishing Corporation http://www.hindawi.com Volume 2014 Journal of Algebra Hindawi Publishing Corporation http://www.hindawi.com Probability and Statistics Volume 2014 The Scientific World Journal Hindawi Publishing Corporation http://www.hindawi.com Hindawi Publishing Corporation http://www.hindawi.com Volume 2014 International Journal of Differential Equations Hindawi Publishing Corporation http://www.hindawi.com Volume 2014 Volume 2014 Submit your manuscripts at http://www.hindawi.com International Journal of Advances in Combinatorics Hindawi Publishing Corporation http://www.hindawi.com Mathematical Physics Hindawi Publishing Corporation http://www.hindawi.com Volume 2014 Journal of Complex Analysis Hindawi Publishing Corporation http://www.hindawi.com Volume 2014 International Journal of Mathematics and Mathematical Sciences Journal of Hindawi Publishing Corporation http://www.hindawi.com Stochastic Analysis Abstract and Applied Analysis Hindawi Publishing Corporation http://www.hindawi.com Hindawi Publishing Corporation http://www.hindawi.com International Journal of Mathematics Volume 2014 Volume 2014 Discrete Dynamics in Nature and Society Volume 2014 Volume 2014 Journal of Journal of Discrete Mathematics Journal of Volume 2014 Hindawi Publishing Corporation http://www.hindawi.com Applied Mathematics Journal of Function Spaces Hindawi Publishing Corporation http://www.hindawi.com Volume 2014 Hindawi Publishing Corporation http://www.hindawi.com Volume 2014 Hindawi Publishing Corporation http://www.hindawi.com Volume 2014 Optimization Hindawi Publishing Corporation http://www.hindawi.com Volume 2014 Hindawi Publishing Corporation http://www.hindawi.com Volume 2014