Study of Scene-Based Nonuniformity Compensation in
Infrared Focal Plane Arrays
by
Laura S. Juliano
B.S., Electrical Sciences and Engineering
Massachusetts Institute of Technology, 1995
Submitted to the Department of Electrical Engineering and Computer Science
in Partial Fulfillment of the Requirements for the Degree of
Master of Engineering in Electrical Engineering and Computer Science
at the Massachusetts Institute of Technology
May 1996
Copyright 1996 Laura S. Juliano. All rights reserved.
The author hereby grants to M.I.T. permission to reproduce
and to distribute copies of this thesis document in whole or in part,
and to grant others the right to do so.
Author
Department of Electricdl Engineering and Computer Science
May 10, 1996
Approved by
,
renneth I. Schultz
Technica•Supervisor, MIT Lincoln Laboratory
Certified by
-. avid H. Staelin
sis Supervisor
Accepted :
° *uk.nairnanr
i
OF.T-ECHNOLOGýY
JUN 11 1996 Eng.
LIBRARIES
Morgenthaler
epartment k.omnnutee on uraduate Theses
Study of Scene-Based Nonuniformity Compensation in
Infrared Focal Plane Arrays
by
Laura S. Juliano
Submitted to the Department of Electrical Engineering and Computer Science
May 10, 1996
In Partial Fulfillment of the Requirements for the Degree of
Master of Engineering in Electrical Engineering and Computer Science.
Abstract
Infrared Focal Plane Arrays (FPAs) are used in a wide variety of military and
industrial applications which require the collection of low noise, high resolution images.
In many of these applications, the dominant noise results from array response
nonuniformities. For low noise applications (e.g., detection of low contrast, unresolved
targets), correction for the nonuniform array response is critical for achieving the
maximum sensitivity of these arrays. Two classes of techniques for reducing the effects of
nonuniformity are source-based compensation, which employs the use of one or more
uniform calibrated sources, and scene-based compensation, which uses scene data to
estimate nonuniformity.
This thesis evaluates the performance of both source-based and scene-based
compensation techniques using experimental sensor data. Array nonuniformities were first
characterized and then used to predict the performance of the different compensation
techniques. Two-point source-based nonuniformity compensation techniques, which use
uniform calibration sources at two temperatures, were applied to blackbody images over a
wide range of temperatures and shown to reduce spatial variations to an average of 0.82
sensor counts (0.03'C). One-point compensation techniques performed as well only near
the calibration temperature; over the wide temperature range, variations averaged 14.7
sensor counts (0.5"C). Scene-based algorithms were evaluated using measured IR images
and were found to decrease spatial variation below that of the two-point compensation
technique, from 43 counts to as low as 17 counts, as a result of the algorithms' clutter
rejection capabilities. The effects of scene-based techniques on target suppression were
not evaluated as a part of this thesis.
VI-A Company: MIT Lincoln Laboratory
Thesis Supervisor: David H. Staelin
Title: Assistant Director, Lincoln Laboratory
Acknowledgments
I would like to thank MIT Lincoln Laboratory for all the support they have given
me over the last 3 years. I am especially grateful to Ken Schultz in Group 106, Systems
and Analysis for all his help and guidance. I would also like to thank everyone in Group
105 - Air Defense Systems who helped with the experimental work. Finally, special
thanks to Dad and Tom for all their love and support.
Table of Contents
1 Introduction.......................................................................................................
8
1.1 Problem Statement .........................................................................................
8
1.2 Thesis Organization.........................................................................................
9
2 Background ..............................................................................................................
11
2.1 Overview.............................................................................................................. 11
2.2 Infrared Imaging Applications......................................................................
13
2.3 Generic FPA Imaging System .................................................
15
2.4 Introduction to Focal Plane Arrays ..................................... ...
............. 16
2.4.1 FPA Detector Materials .....................................................................
17
2.5 Nonuniformity in Focal Plane Arrays .........................................................
19
2.6 General Algorithms for Nonuniformity Compensation...................
22
3 Nonuniformity .......................................................
............................................. 24
3.1 Experimental Setup ..............................................................................................
24
3.2 General Nonuniformity Characteristics ........................................
.........25
3.2.1 Sensor Response as a Function of Scene Radiance............................... 27
3.2.2 Nonuniformity as a Function of Scene Radiance ................................... .. 30
3.3 Spatial Characteristics of Nonuniformity......................................
31
3.4 Temporal Characteristics of Nonuniformity .......................................................
34
3.5 Summary ..............................................................................................................
36
4 Source-Based Nonuniformity Compensation .....................................
.......
4.1 Implementation Issues ..........................................................................................
37
38
4.2 Performance ............................................... .................................................... 39
4.2.1 One-Point Compensation .............................................................................
40
4.2.2 Two-Point Compensation .................................................................
42
............ 45
4.2.3 Temporal Noise Consideration.........................................
47
4.2.4 Investigation of Gain and Offset Terms ........................................................
4.3 Summary..............................................................................................................
5 Scene-Based Nonuniformity Compensation.............................
5.1 Implementation Issues ............................................................
50
.............. 51
......................... 52
5.2 Performance ....................................................................................................
5.2.1 Offset Comparison with Source-Based Techniques ...................................
5.2.2 Applying Algorithm to Synthesized Scene Data .....................................
5.2.3 Applying Algorithm to Skyball Data........................................... .....
53
54
58
67
6 Conclusion and Summary ........................................................................................
75
7 Bibliography .............................................................................................................
77
List of Figures
......... 16
Figure 2-1: Image Processing Block Diagram .......................................
before
nonuniformity
an
HgCdTe
sensor
a)
Infrared
image
from
Figure 2-2:
compensation and b) after nonuniformity compensation ........................................... 21
Figure 3-1: Laboratory setup for CE camera ..................................................................
25
Figure 3-2: Histogram of InSb response to 250 C blackbody............................... 26
Figure 3-3: Mean of InSb array response as a function of blackbody temperature........... 28
Figure 3-4: Relationship between blackbody radiance and sensor counts ..................... 29
Figure 3-5: Standard deviation of InSb array response as a function of blackbody
temperature................................................. ...................................................... 30
Figure 3-6: Horizontal spatial correlation of nonuniformity ........................................ 32
Figure 3-7: Horizontal spatial correlation of nonuniformity .................................... . 32
Figure 3-8: Vertical spatial correlation of nonuniformity ................................................
33
Figure 3-9: Vertical spatial correlation of nonuniformity ................................................
33
Figure 3-10: Relative drift of mean blackbody response of InSb array (the initial
mean value of 1065.6 counts was subtracted from all mean values) ...................... 35
Figure 3-11: Drift of standard deviation of blackbody response of InSb array (the
initial standard deviation of 73.7 counts was subtracted from all standard
deviation values) .....................................................................................................
36
Figure 4-1: Compensation block diagram............................................................
38
0
Figure 4-2: One-point NUC using 25 C as calibration temperature ............................. 41
Figure 4-3: Comparison of original array nonuniformity and error after one-point
N U C .......................................................................................................................
42
Figure 4-4: Two-point NUC using 250 C and 400 C as calibration temperatures............ 44
Figure 4-5: Comparison of original nonuniformity with one-point and two-point
N U C ................................................................................................
....................... 45
Figure 4-6: Standard deviation of single frames after applying offset correction to
200 consecutive frames (frame rate = 51.44 Hz)................................................... 46
Figure 4-7: Temporal variation of one pixel after offset compensation (minus mean
pixel value of 1223.2 counts) .....................................................
47
Figure 4-8: Histogram of Offset Coefficients in 2pt NUC ............................................... 48
Figure 4-9: Histogram of Gain Coefficients in 2pt NUC ................................................. 49
Figure 5-1: Performance of scene-based temporal high-pass filter applied to 200
frames of blackbody data at 250 C ............................................................................
55
Figure 5-2: Performance of scene-based temporal high-pass filter applied to 200
frames of blackbody data at 250 C...............................................
56
Figure 5-3: Comparison of temporal high-pass filter, running average, and onepoint compensation applied to 200 frames from CE camera of blackbody at
250 C ....................................................................................................................... 57
Figure 5-4: Section of IRMS image of Harvard, MA used to test temporal highpass filter ................................................................................................................ 59
Figure 5-5: Horizontal spatial correlation of IRMS image (calculated in 100x100pixel blocks)............................................................................................................ 60
Figure 5-6: Block diagram of algorithm testing ......................................
........ 61
Figure 5-7: Autocorrelation of high-pass filtered IRMS image ....................................... 62
Figure 5-8: Performance of temporal high-pass filter (rate=20) ...................................... 63
Figure 5-9: Steady state value of error between compensated and original images
after spatial high-pass filter........................................................64
Figure 5-10: Comparison of Odiff, yf(m), and Gop as performance measure
(standard deviation of uniform sequence before spatial high-pass filter = 6.97
counts)................................... ........................................................................... 67
Figure 5-11: Uncompensated image from Skyball sensor.......................................
68
Figure 5-12: Compensated Skyball image after (a) Temporal high-pass filter
(m=10), (b) 1-point method (350 C calibration temperature), and (c) 2-point
method (20 0 C and 35 0 C calibration temperatures) .........................................
68
Figure 5-13: Block diagram of performance evaluation ........................................
69
Figure 5-14: Comparison of one-point and two-point compensation for Skyball
data........................................................................................................................
71
Figure 5-15: Standard deviation of compensated image after temporal and spatial
high-pass filters .......................................................................................................
72
Figure 5-16: Comparison of scene-based compensation and two-point
compensation after spatial high-pass filter...................................
............ 73
1
Introduction
1.1 Problem Statement
Nonuniformity in infrared focal plane arrays (FPAs) results in fixed pattern noise
which limits infrared system performance. The methods which are commonly used to
reduce fixed pattern noise can be separated into two main categories: source-based and
scene-based nonuniformity compensation techniques.
There have been a number of studies of source-based compensation techniques,
but there has been considerably less work in evaluating and analyzing scene-based
techniques. This thesis will investigate scene-based nonuniformity compensation methods;
specifically, scene-based compensation techniques are analyzed to determine the
conditions for which a specific level of spatial uniformity can be achieved. This
information can be used to determine reasonable conditions for data collecting and
subsequent processing.
To this end, nonuniformity characteristics are examined using experimental sensor
data. A laboratory setup consisting of an infrared imaging system, blackbody source, and
simple targets was used to obtain test data. The data are used to highlight aspects of
nonuniformity and provide motivation for compensation techniques.
Source-based methods are developed and applied to experimental data. These
performance results serve as a baseline for comparison for the scene-based techniques.
The capabilities of one specific scene averaging technique are examined for a variety of
backgrounds as a function of the spatial frequency and contrast of the background scene.
In addition, data collected by one or more operational sensors are used as another test of
the various compensation methods. The combination of theoretical and experimental
work provides an analysis of scene-based compensation techniques.
1.2 Thesis Organization
This thesis consists of six chapters which develop nonuniformity characteristics
and an analysis of nonuniformity compensation.
The first chapter provides a brief
introduction to the goals and organization of this thesis.
The second chapter gives an overview of infrared focal plane arrays and introduces
the problems of nonuniformity. This chapter also introduces the concepts of scene-based
and source-based nonuniformity compensation.
Chapter 3 consists of an analysis of the spatial and temporal characteristics of focal
plane array nonuniformity.
It also addresses nonuniformity measurement issues and
describes the experimental setup used to obtain sensor data.
Chapter 4 concentrates on the
source-based nonuniformity compensation
techniques. This serves as the basis of comparison for the evaluation of the scene-based
compensation techniques.
Chapter
5 introduces
scene-based
algorithms
and
discusses
algorithm
implementation and performance. The results are compared to the performance of the
source-based compensation techniques.
The final chapter presents a summary of the thesis and discusses potential future
work.
2
Background
The goal of this chapter is to introduce the reader to focal plane array technology
and to provide a context for the problem of nonuniformity compensation.
First, an
overview of infrared imaging applications is presented. Nonuniformity and its relation to
detector performance is then discussed.
In addition, motivation for nonuniformity
compensation is developed. The chapter concludes with a general overview of the sourcebased and scene-based compensation techniques.
2.1 Overview
Infrared systems have long been of interest in military systems and more recently in
commercial applications. This interest is based on the desire to detect, recognize, classify,
or identify objects by their emission characteristics. Objects at or near room temperature
(295K) have a peak emission at 9.8 gm, as determined by the Wien Displacement Law for
peak radiation. Hot objects, such as the plume from a jet aircraft, approximately 650K
(Hudson, 1969) have a peak emission at 4.5 gm. These two classes of objects have led to
the interest in infrared technology, more specifically to mid-wave (3-5 Lim) and long-wave
(8-12gtm) spectral bands. These bands are even more significant when one observes the
atmospheric windows associated with these two infrared spectral bands. The atmosphere
has very high transmission for both the mid-wave and long-wave bands, less the CO 2
absorption band from 4.2 to 4.5 gm and the H20 absorption band from 9.5-10.2 gm.
Initially, infrared imaging technology consisted of a small number of detectors
which were scanned across an image.
Since these scanned linear arrays had a small
number of detectors, it was relatively easy to fabricate detectors with matching
characteristics. There are drawbacks associated with these scanning systems; additional
hardware and optics are required to implement the scanning mechanism. For each frame
of data, the detector array must scan across the image. This limits the pixel integration
time, which reduces system sensitivity.
As the fabrication technology advanced, staring focal plane arrays with large
numbers of detector elements were developed. As these arrays do not require scanning,
they provide for significantly increased integration times, and therefore increased
sensitivity. Since there are a large number of detector elements, the quality of fabrication
techniques is crucial to the development of large, uniform arrays; nonuniform production
techniques can result in nonuniform array response. Such array nonuniformities may in
fact limit sensitivity; spatial variations in the array response can obscure the target
signature, which reduces system detection performance.
The problem is further
complicated, as the spatial variations in array response can vary with time. Any technique
to compensate for nonuniform array response must consider how the response varies
during the time of interest.
Since the development and performance of FPA-based infrared systems have been
limited by array nonuniformity, nonuniformity compensation techniques are generally
required to achieve the full potential of staring focal plane arrays. These techniques are
classified as either source-based or scene-based techniques.
Source-based techniques
employ the use of one or more uniform radiation sources to calculate compensation
coefficients. Such techniques can be complex to implement since they require uniform
sources and additional hardware to make the compensation measurements. If the source
radiation or temperature characteristics are known, source-based techniques have the
potential to provide calibrated image data; the sensor output can be mapped from counts
to absolute temperature or radiance values. Scene-based compensation techniques use
image data to calculate compensation coefficients. Consequently, scene-based techniques
have a potential to provide a simple alternative to source-based techniques. For many
applications of practical interest, such compensated relative measurements are sufficient
(e.g., target detection).
2.2 Infrared Imaging Applications
Infrared focal plane arrays, both scanning and staring two-dimensional arrays, have
a wide variety of applications. The specifics of the system application affect the choice of
the FPA, and influence the choice of the nonuniformity compensation approach. Various
applications of interest are described below.
In infrared search and tracking (IRST) applications, the system is generally used
for long-range surveillance, early target detection, and tracking. The normal system mode
of operation is characterized as "track-while-scan". The detector array is scanned across
an inertially stabilized volume in space. Single or multiple targets are detected and tracked
in subsequent frames while the system continues to scan the prescribed inertial volume.
Tracking is maintained through frame to frame correlation of detections. Due to the long
range operational requirement, the targets of interest are unresolved, typically less than the
size of a pixel (detector element). Therefore, high sensitivity and resolution are required
in IRST applications.
Infrared missile warning systems (IMWS) have the same unresolved target, trackwhile-scan functionality as IRST systems. In the case of aircraft-based missile threat
warning systems, a wide-field-of-view sensor with a two-dimensional staring array is used
to detect the unresolved missile targets (Kruer, Scribner, and Killiany, 1987). The goal of
the system is to achieve rapid target declaration, with a low false alarm rate, in order to
either avoid the missile or employ countermeasures to defeat the missile.
In the case of an infrared missile seeker application, the detector is mounted within
a gimbal in the nose of the missile. The objective is to acquire and intercept a single
target. Generally, the infrared seeker is cued to a target area and must rapidly acquire the
initially unresolved target, since engagement times can be on the order of seconds. Missile
seekers typically employ single target detection and tracking, as opposed to multiple target
tracking.
Forward looking infrared (FLIR) sensors are traditionally used for air-to-ground
target recognition and tracking for weapon delivery. In this case, the target is centered in
the field-of-view of the sensor, and the system tracks a single target. FLIR systems are
often equipped with boresighted laser range finders for weapon guidance. Unlike the
missile seeker applications, the targets are highly resolved and the output signal is intended
to be viewed and interpreted by a human operator. Advanced systems couple the output
signal to automatic target recognition functions which automate the weapon delivery
process.
While each of these applications has its own set of requirements for infrared sensor
performance, the subsequent system characteristics affect the implementation of
nonuniformity compensation algorithms. Although all applications can potentially benefit
from nonuniformity compensation, the efficacy of the compensation algorithms varies with
the application. With IRST applications, for example, compensation may be applied after
several frames of data. Therefore, a compensation algorithm that requires multiple frames
of data may not adversely impact sensor performance. However, in seeker applications
where the time of engagement is very short and access to an infrared reference source
difficult to implement, compensation needs to occur after just a few frames without the
benefit of a calibrated reference. In the case of FLIR systems, where a human observer is
involved in the infrared scene interpretation, precise nonuniformity compensation is less
important. Compensation cannot be considered without regard to sensor application.
2.3 Generic FPA Imaging System
IRST and IMWS represent an emerging class of infrared systems where the
objective is to detect unresolved targets. Figure 2-1 shows the general image processing
steps used in these infrared system applications.
The FPA sensor images either a
background scene, which may contain potential targets, or a uniform calibrated reference
source. Following image acquisition, a high-pass filter can be used to accentuate high
spatial frequency components (as associated with an unresolved target) relative to a low
spatial frequency background (e.g., scene clutter). A threshold test is then applied to the
high-pass filtered image to test for the presence of targets. This filtering method selects
pixels that do not match the underlying correlation of the background scene; the target is
assumed to have high spatial frequency relative to the background. Nonuniformity tends
to have high spatial frequency components; in this respect, nonuniformity characteristics
are very similar to target characteristics and therefore will not be removed by high-pass
filtering. If the nonuniformity is not corrected by the use of compensation algorithms
prior to target detection, the detection capabilities of a system will be greatly diminished,
as the nonuniformity may cause false alarms.
Target
Background
Scene
I
•77>
unnorm
Calibrated
Source
Figure 2-1: Image Processing Block Diagram
2.4 Introduction to Focal Plane Arrays
Originally, infrared detectors consisted of either a single detector element or a
small linear array of detector elements that were scanned across a scene to obtain an
infrared representation of the scene. Scanning sensors using these detector configurations
were limited in both resolution and sensitivity, since they typically had a limited dwell time
and large detector size. As detector technology matured, large numbers of detector
elements could be fabricated as part of a two-dimensional FPA. The array of detectors is
coupled to a multiplexer/preamplifier readout circuit.
Two-dimensional staring FPAs, consisting of thousands of detectors, have a
number of potential advantages over systems with scanned linear arrays. The staring array
design allows economical high-density packing of detectors on the substrate, and allows
for future, advanced signal processing on the focal plane. In addition, infrared systems
employing staring FPAs have increased sensitivity due to longer integration times, higher
frame rate capabilities and simpler optics.
There are fabrication issues which affect the performance characteristics of FPAs.
The nonuniformity of the detector arrays is often the limiting factor in system
performance. Noise can also be introduced in the readout circuitry, which transfers the
detector signals off the focal plane. Charge transfer efficiency variations across the array
are also a source of nonuniformity. Another source of noise is cross talk, where signals
from one detector affect the readout circuitry for nearby detectors.
2.4.1 FPA Detector Materials
There are a number of issues to consider when selecting infrared detector
materials. The detector material must operate in the desired spectral band, for example,
either mid-wave infrared (MWIR) or long-wave infrared (LWIR). The detector material
must have acceptable electronic properties over an operationally feasible temperature
regime. The fabrication technology must be mature enough to produce uniform arrays;
processing which is silicon-based is more developed and controllable than processing
which involves less common materials.
Typical applications for infrared FPAs require detectors that operate in either the
MWIR or LWIR. The MWIR consists of the spectral band ranging from 3-5 gtm. The
LWIR includes wavelengths in the 8-12 gpm spectral band. The operating region has a
direct relation to the required bandgap of the detector material. The relationship between
bandgap energy and spectral operating region is given by,
E=
1.24
[eV],
where E is the bandgap energy and X is the maximum wavelength in the spectral band.
This relation requires the detector material to have a bandgap energy of approximately 0.1
eV for LWIR detectors and 0.25 eV for MWIR detectors.
In order to reduce dark current in the detector, the FPA is operated at a low
temperature. The temperature of operation depends on the allowable array noise, but is
typically 77K, for infrared sensors.
Over the detector spectral band, the quantum
efficiency of a detector is a measure of how well the material converts incident radiation to
electric charge.
High quantum efficiency detectors (e.g., InSb and HgCdTe) have
quantum efficiency values over 60%, while low quantum efficiency detectors (e.g., PtSi,
IrSi) have quantum efficiencies less than 1% (Cantella, 1992).
Producability is also a key issue in focal plane array development. In order to
fabricate a uniform array, the process must be well controlled. The process uniformity
places a practical limit on the size of the focal plane array.
Three main detector materials, which satisfy the requirements for good infrared
detection, are platinum silicide (PtSi), indium antimonide (InSb), and mercury cadmium
telluride (HgCdTe). Platinum silicide and indium antimonide are limited to mid-wave
detection. While platinum silicide is advantageous because it is silicon-based, and the
technology is very mature, this material has low quantum efficiency and must be operated
at very low temperatures. Indium antimonide has a high quantum efficiency and advances
in InSb processing technology have resulted in high quality FPAs. Mercury cadmium
telluride, with its variable bandgap, can be operated in either the mid-wave or long-wave
infrared bands. The bandgap of HgCdTe is a function of composition and therefore any
nonuniformity in composition creates nonuniformity in spectral response. HgCdTe has a
significantly more complex fabrication procedure, as compare to PtSi or InSb, particularly
in long-wave applications, which results in reduced uniformity. For many applications,
this drawback is outweighed by its high quantum efficiency and low noise operation. The
data used in this investigation were obtained from both InSb and HgCdTe arrays.
2.5 Nonuniformity in Focal Plane Arrays
In many cases, nonuniformity is the limiting factor in the detection performance of
infrared focal plane arrays. To understand why this is the case, we must examine the
sources and characteristics of array nonuniformity. The goal of this section is to give the
reader a general sense of the importance of nonuniformity compensation. More specific
characteristics of nonuniformity are analyzed in Chapter 3.
Nonuniformity in FPAs arises from a number of sources.
Differences in the
dimensions and geometry of the individual detectors cause differing responses from one
detector to another. Variations in material composition affect detector quantum efficiency
and spectral response. In HgCdTe arrays, for example, changes in composition of the
detector material result in detectors with varying bandgap. This causes a variation in the
maximum cutoff wavelength, which results in nonuniformity in spectral response.
Nonuniformity also occurs when there is a variation in the coupling of the detector to the
readout mechanism. Finally, temperature variations across the array, which come from
uneven cooling of the focal plane array, affect the detector response. It is important to
understand that the sources of nonuniformity have different spatial and temporal
characteristics. In general, periodic nonuniformity compensation is required to maximize
array uniformity. This drift in focal plane array response presents special problems with
nonuniformity compensation.
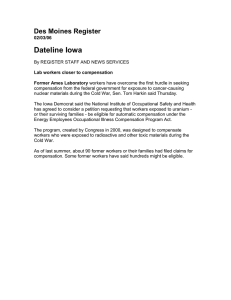
The following images in Figure 2-2 demonstrate some of the important
characteristics of sensor nonuniformity. The image on the left is a raw image taken with a
HgCdTe sensor, where the background is a desert scene. The image on the right is the
same image, after nonuniformity correction. The scene detail is greatly increased after
compensation.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
-.n................
i :~::j~j::::~:::i.:::::i~::i~:·:lM.:'·;X
I
i:~~:~:~~:~'i~:ss·:·:
;·:::::~~:::~::·:~~
"
~i·Yi····.
'" ·
Eiiiiiil~~i
~7~·~~i~·'~·.·~'.2~··r··i
''-"' % f...
: ·.::: !:~~:.
·r~·rr~
~~::~'~'u
~~ S::·:·:·:~t
.·.~.·.
:::::~:~::::~.s::~:::::~
~:··· ....;~;::.:~.:.t~?:i:~:
:·i··~·r~::·:.;'."5
M *7..'.·:-
(b)
Figure 2-2: Infrared image from an HgCdTe sensor a) before nonuniformity compensation
and b) after nonuniformity compensation
As is evident in the uncompensated image, the nonuniformity completely obscures
the scene data. In this example, the scene information consists of small perturbations
about the much larger nonuniformity.
This tends to be a problem in infrared imaging,
because infrared scenes typically have low contrast.
Although the magnitude of the nonuniformity poses a serious problem, it is the
spatial frequency characteristics of the nonuniformity that present the greatest problems
with respect to performance.
Simple high-pass filtering will not remove the non-
uniformity present in the above images, since the nonuniformity has considerable high
frequency components.
2.6 General Algorithms for Nonuniformity
Compensation
The two main classes of nonuniformity compensation algorithms are source-based
and scene-based compensation. An overview of these techniques is presented here and the
algorithms are explored in greater depth in Chapters 4 and 5. See Table 1 for a qualitative
overview of source-based and scene-based methods.
Source-Based
Advantages
Disadvantages
Absolute calibration
Recalibration required
Good performance near
calibration temperature
Poor performance away
from calibration
temperature
Scene-Based
No blackbody required
Adaptive algorithm
Relative temperature
calibration
Generally correct offset
Sonly
Table 1: Relative Merits of Compensation Techniques
Source-based nonuniformity compensation techniques commonly employ one or
more uniform blackbody sources. These blackbody sources serve as calibration references
from which compensation coefficients are derived.
The most common source-based
technique is a two-point correction scheme, which compensates for offset and gain
variations from pixel to pixel. In this technique, the sources are operated at temperatures
which span the scene temperatures anticipated in normal system operations.
Source-based nonuniformity compensation must be embedded in the system to
accurately address drift in FPA response, an initial factory calibration is not sufficient.
Therefore, periodic recalibration within the infrared system is required for accurate
compensation. The implementation of the blackbody reference within the system can be
impractical or costly in many applications; the system needs more complicated optics in
order to view the blackbody and a place in a the system to locate the reference sources.
Scene-based compensation uses scene data to approximate observations of a
uniform temperature source, thus simplifying the imaging system.
Compensation
coefficients are generally calculated from some form of spatial averaging over diverse
scenes. This can be accomplished in a variety of ways, including spatial or temporal
filtering, angle dither, and image defocus. Unlike source-base calibration, scene-based
compensation is a relative calibration. This is not, however, a problem in IRST or IMWS
applications where the temperature difference between background scene and target
objects, as opposed to the absolute temperature, is the quantity of interest.
3
Nonuniformity
The goal of this chapter is to gain an understanding of the sources of
nonuniformity and the spatial and temporal characteristics of nonuniformity. This will be
important later in evaluating nonuniformity compensation algorithms. This chapter will
investigate some of the general characteristics of nonuniformity in focal plane arrays.
Experimental data will be used to illustrate some of the key features of sensor
nonuniformity.
3.1 Experimental Setup
The majority of the data analyzed in the next two chapters were obtained with the
Cincinnati Electronics IRC-160ST imaging system, which has a 160x120 InSb array. The
IRC-160ST has a standard 50mm EFL (Effective Focal Length) lens that provides a total
field-of-view of 9.10 in azimuth by 6.80 in elevation and a nominal pixel resolution of 1
milliradian. An additional 200mm EFL lens can be attached, providing 2.30 x 1.70 fieldof-view and a 0.25 mrad pixel resolution. The detector/multiplexer array in the camera is
cooled to 78K with a mechanical Stirling Cycle microcooler (Cincinnati Electronics 1993).
The laboratory setup for the camera is shown in Figure 3-1. The camera was
arranged to view a target that was projected at the focus of a collimator. The target that
was primarily used was a flat target that transmitted the radiation of the 12 inch blackbody
that was behind it. The blackbody temperature ranged from 100C to 600 C.
The digital data from the camera were transferred to a Sun SPARC workstation
via a digital video interface board (frame grabber). The frames of data can be displayed as
well as written to a file. The images were obtained and processed using the Interactive
Data Language (IDL). Some of the code written for processing images in this thesis was
code developed in the Air Defense Systems group at Lincoln Laboratory for the Airborne
Infrared Imager (AIRI).
'4
12 Inch
Blackbody
Mirror
Target
Figure 3-1: Laboratory setup for CE camera
3.2 General Nonuniformity Characteristics
In Chapter 2, the image from a HgCdTe sensor before nonuniformity
compensation helped to illustrate some characteristics of nonuniformity in focal plane
arrays. The nonuniformity was significant compared to the background image and it had
high spatial frequency components. In this chapter, these characteristics will be quantified.
The data used in this section is primarily imaged blackbody data. Since the blackbody
provides uniform radiance, all variations in the output images will be caused by
nonuniformity. As an example, Figure 3-2 is a histogram of the output of the individual
detector element response in the CE InSb array to a 250 C blackbody.
0
500
1000
1500
2000
2500
3000
Counts
Figure 3-2: Histogram of InSb response to 250 C blackbody
Nonuniformity in focal plane arrays can be described as a combination of an
additive or offset term, a multiplicative or gain term, and higher order terms. The output
of each detector, x(t), including the nonuniformity terms, can be written as a function of
the scene radiance, r(t), as follows:
x(t) = a(t) + b(t)r(t) + f(r, t) ,
where x(t) is the output of the detector, a(t) is the offset term, b(t) is the gain term, and
f(r,t) represents the higher order terms. The time dependence of the nonuniformity terms
is examined later in the chapter. In this thesis, the high order nonuniformity terms are
neglected.
The additive nonuniformity component a(t), which is not a function of scene
radiance, comes from variations in dark current, charge-transfer efficiency, and variations
in the readout mechanism. This offset term dominates at very low radiance values.
The multiplicative nonuniformity term, b(t)r(t), is the term which is a function of
exposure.
This results from variations in the responsivity from detector element to
detector element and from photon noise, which is proportional to the square root of
exposure. The effects of the gain and higher order terms increase as background radiance
increase. The relative importance of correcting for gain and offset variations is an issue
that will be addressed when evaluating compensation algorithms.
3.2.1 Sensor Response as a Function of Scene Radiance
One important measurement of an array is how the response of the array varies
with scene radiance.
Figure 3-3 demonstrates the mapping between background
temperature and the output of the InSb detector array, measured in counts. The array was
used to image a blackbody over a range of temperatures. This gives an indication of the
relationship between scene temperature and output counts of the detector system. This
plot can be used as calibration data, that is, it provides the information necessary to
convert sensor counts to temperature. This will be useful in converting the variance of the
response in counts to an apparent temperature variance.
CO)
Blackbody Temperature (degrees C)
Figure 3-3: Mean of InSb array response as a function of blackbody temperature
To verify that the above response as a function of temperature is as expected, we
use Planck's law, which gives the spectral distribution of the blackbody radiance as a
function of temperature,
R() =
37413
3714388
Xs(Exp(
[W cm2 -].
)-
1)
Integrating the above equation over the spectral band in which the CE camera operates,
2.2gm to 4.7gm, will give the relationship between the radiance and the temperature
source. Table 2 lists the results of the integration for the temperatures of interest. Using
these data, we can plot the sensor output (in counts) against the radiance of the blackbody
source. Figure 3-4 indicates that the sensor output is a linear function of input radiance.
Temperature ('C)
10
15
20
25
30
35
40
45
Radiance (W cm2 p)
6.03E-05
7.44E-05
9.13E-05
1.11E-04
1.35E-04
1.62E-04
1.94E-04
2.31E-04
Table 2: Conversion between temperature and radiance for CE camera
180C
1600
-
1400
-
1200
-
1000
800
K
600
400
200
·A·-
I
0.5
2
1.5
Radiance (W cm-2 micron-i)
2.5
x 10,
Figure 3-4: Relationship between blackbody radiance and sensor counts
3.2.2 Nonuniformity as a Function of Scene Radiance
While the previous graph shows the average relationship between array input and
output, it gives no sense of the array nonuniformity. The presence of multiplicative terms
in the nonuniformity will result in nonuniformity that is a function of scene radiance.
Figure 3-5 shows a measure of nonuniformity as a function of the blackbody temperature.
The nonuniformity is measured as the standard deviation of the response over the array as
a function of the temperature of the imaged blackbody. Using the information in Figure 33, we can map the count axis to a temperature axis. For example, a standard deviation of
80 counts corresponds to a standard deviation across the array of approximately 30 C.
4.3
rr^
i
1
3.6
2.9 2.2
,
1.4
0.7
10
15
20
25
30
35
Blackbody Temperature (degrees C)
40
45
0
Figure 3-5: Standard deviation of InSb array response as a function of blackbody
temperature
3.3 Spatial Characteristics of Nonuniformity
The spatial characteristics of interest are not only nonuniformity magnitude, but
the spatial frequency of the nonuniformity.
If the nonuniformity has a low spatial
correlation (high spatial frequency) then it has many of the same characteristics as a
potential unresolved target. If the nonuniformity were to have a low spatial frequency,
that is, if the nonuniformity varied slowly across the array, then it would very likely pose
little or no problem to subsequent target detection, as scenes are typically processed with
a high-pass filter prior to detection. In Chapter 2, we saw an example of an uncorrected
infrared image, which appeared to have low spatial correlation. In this section we will
quantify those results.
The graphs in Figure 3-6 though Figure 3-9 plot the horizontal and vertical spatial
autocorrelation of an image of a blackbody source.
Since the background image is
constant, any variation in the image is due to nonuniformity. By making an estimate of the
correlation between pixels in the array, we are estimating the correlation of the
nonuniformity. The figures show that the correlation falls off significantly for a difference
of one pixel, which indicates the presence of high spatial frequencies in the sensor
nonuniformity.
10
20
30
40
Pixel Separation
50
Figure 3-6: Horizontal spatial correlation of nonuniformity
1
0.9
0.8
• U./
0.6
- 0.5
0.4
8 0.3
0.2
0.1
nv
2
4
6
Pixel Separation
8
Figure 3-7: Horizontal spatial correlation of nonuniformity
60
Z
c
(3
°C€
.2
Cu
10
0
20
40
30
Pixel Separation
50
60
Figure 3-8: Vertical spatial correlation of nonuniformity
1
0.9
0.8
- 0.7
S0.6
o
- 0.5
0.4
80.3
0.2
0.1
n
0
2
4
6
Pixel Separation
8
Figure 3-9: Vertical spatial correlation of nonuniformity
10
3.4 Temporal Characteristics of Nonuniformity
If the nonuniformity were constant in time, then we could perform compensation
just once, and we would expect the performance of the compensation algorithm to remain
high. However, drift in FPA parameters and differences in operating conditions cause a
drift in the nonuniformity. This requires that compensation be performed periodically, in
order to keep the nonuniformity compensation as accurate as possible.
To get an indication of the magnitude of the drift, Figure 3-10 shows the response
of an InSb array to a 250 C blackbody over a period of 6 hours. The units of counts are
not very revealing about the magnitude of the nonuniformity. However, the temperature
scale on the right axis, which was calculated from the data in Figure 3-3, indicates that
over the viewing period the array response would drift almost 0.5 0C. That is, a blackbody
of 250 C would appear to warm up to almost 25.50 C after a number of hours. These data
indicate that the mapping between sensor counts and temperature changes with time, that
is, that recalibration is necessary to get an accurate measurement of temperature.
However, it is not clear from the mean response of the array how the nonuniformity
changes with time.
0
Et
E
Cu
%F
0
1
2
3
4
5
6
Time (hours)
Figure 3-10: Relative drift of mean blackbody response of InSb array (the initial mean
value of 1065.6 counts was subtracted from all mean values)
The standard deviation of the response of the array to a blackbody is a measure of
the magnitude of the nonuniformity. In addition to the appearance of temperature drift
over time, the magnitude of nonuniformity appears to increase over a period of time.
Figure 3-11 shows the drift in the standard deviation of the response to the 250 C
blackbody. The drift in the standard deviation of the FPA response, although very small
over the 6 hour time period, indicates that the performance of any nonadaptive
nonuniformity algorithm will degrade with time.
0.
029
0.
025
0220
0
018 9
U 0
014=
011 E
O0
20.
007M
004
0
Time (hours)
Figure 3-11: Drift of standard deviation of blackbody response of InSb array (the initial
standard deviation of 73.7 counts was subtracted from all standard deviation values)
3.5 Summary
The measurements and analysis of blackbody data in this chapter illustrate the
important features of nonuniformity.
The high spatial frequency and relatively large
magnitude prove the need to compensate for nonuniformity prior to target detection. The
drift in array response indicates that successful compensation algorithms will need to be
adaptive.
Finally, the relative importance of gain and offset correction needs to be
examined when evaluating compensation algorithms.
4
Source-Based Nonuniformity Compensation
In this chapter source-based nonuniformity compensation algorithms will be
examined.
This evaluation will provide a basis of comparison for the scene-based
nonuniformity compensation algorithms addressed in Chapter 5. After a discussion of
implementation, the performance of these algorithms will be presented using data from the
CE camera used in Chapter 3.
In source-based compensation techniques, one or more uniform sources are used
to estimate the nonuniformity compensation coefficients. The number of compensation
coefficients depends on the number of temperatures imaged, as illustrated in Figure 4-1.
If we take a blackbody measurement at one temperature, we can obtain an offset
correction term for each detector element in the array. If we take a second temperature
measurement, then we can also compensate for gain variations in each pixel.
Any
additional temperature measurements can be used to compensate for higher order terms or
to do piecewise-linear compensation between adjacent temperature values. The specific
calculations of the coefficients will be covered in the performance examples.
In addition to using blackbody measurements to perform nonuniformity
compensation, these blackbody measurements can be used to perform calibration. One
advantage of source-based techniques is that they can be used to calibrate the sensor as
calibrated blackbody frames are measured.
Figure 4-1: Compensation block diagram
4.1 Implementation Issues
The
two-or-more-point
nonuniformity
compensation
techniques
are not
computationally complicated to implement; however, taking the calibration frames
presents various problems. Inserting the blackbody into the field of view of the sensor
requires additional hardware and optics; in some systems, the array is mechanically rotated
in its housing to view the blackbody reference which is located behind the array. Another
potential implementation problem is that the blackbody temperature must be accurately
controlled, which requires a precision cooling and heating system.
In
addition
to hardware
requirements
for
source-based
nonuniformity
compensation, measurements of the uniform calibrated source must be obtained. The time
required to make these measurements is time that cannot be spent imaging scene
information.
Finally, the change in nonuniformity with time requires that compensation
coefficients be recalculated periodically, based on the FPA characteristics. The time frame
over which recalibration must occur depends on the performance requirements for the
imaging system.
4.2 Performance
The performance of the source-based algorithms depends on the number of
uniform temperature sources used. It is expected that the more temperatures that are used
in the compensation, the better the performance, assuming that the temperatures of the
blackbodies span the range of expected scene temperatures. However, there is a tradeoff
between the accuracy of the compensation and the amount of time and storage that is
associated with calibrating at multiple temperatures. Most applications use two-point
compensation. If more than two temperature points are used, it is generally for the
purpose of performing piecewise-linear compensation.
The experimental data used to evaluate the performance of the one-point and twopoint nonuniformity compensation (NUC) techniques are the blackbody data obtained
from measurements using the CE camera to image blackbodies of varying temperatures.
There are two types of noise in the sensor, nonuniformity, or fixed pattern noise,
and temporal noise, which consists of photon noise and additive readout noise. The
photon noise is a function of the exposure and will vary from frame to frame. As exposure
levels increase, the photon noise becomes less significant, since it grows as the square root
of the exposure. To minimize the effects of temporal noise in the compensation, multiple
frames of data are averaged together before calculating correction coefficients. In the
measurements in this section, the coefficients are applied to averaged frames, rather than
individual frames. This reduces temporal noise variations that will contribute to the
compensation error. The temporal noise is investigated as a separate issue.
4.2.1 One-Point Compensation
In one-point compensation, data at one temperature are required and only an offset
correction term is calculated. The calculation for the offset correction term for each pixel,
o(i, j) is as follows:
P.L -
CL(i, j)
o(i,j) = pL - (i, j)
where cL is the low temperature calibration frame. The offset term will correct each pixel
in the calibration frame to be the mean value of the array response, •L.
In the following example, a 250 C blackbody was used as the compensation
temperature. To minimize the effects of temporal noise, the offset coefficients were
calculated from a 200-frame average. The derived offset compensation coefficients were
then added to the 200 frame-averaged images of the blackbody sources over a range of
temperatures, thereby isolating the fixed pattern noise from the temporal noise. Since we
are imaging a uniform source, the standard deviation of the compensated images is the
residual compensation error.
Figure 4-2 illustrates the standard deviation of the corrected images. At 25 0C, the
compensation temperature, the error is zero. This was forced to be the case because this
compensation technique calculates the offsets by eliminating the variance at the
compensation temperature.
However, the error increases the further the blackbody
temperature is from the compensation temperature. The left axis is the standard deviation
in sensor counts, while the right axis indicates the equivalent standard deviation in
temperature (using the data from Figure 3-3).
1.08
0.90 5
C,,
0
0.72
0.54-
CO)
Ilu
cc
0.36 -
0.18
10
15
20
35
25
30
Temperature (degrees C)
40
0
45
Figure 4-2: One-point NUC using 250C as calibration temperature
This implies that the offset correction is optimized for images whose scene
temperature is close to that of the blackbody used for compensation. Figure 4-3 plots the
standard deviation of the original images as well as the error after one-point
compensation. It is apparent that the error after compensation is significantly less than
original nonuniformity, even at temperatures away from the offset temperature.
^^ A
1
34.3
4
3.6
1
2.9
8
2.2
cc
rr
1.4 •
0.7
0
Temperature (degrees C)
Figure 4-3: Comparison of original array nonuniformity and error after one-point NUC
4.2.2 Two-Point Compensation
In two-point compensation, data from two temperatures are required to calculate
offset and gain coefficients. Since the result of the one-point compensation indicated that
the best performance occurred close to the compensation temperature, the compensation
temperatures should span the expected range of scene temperatures.
The offset and gain coefficients, o(i, j) and g(i, j) can be calculated as follows:
1
PL = -
H
g(i,j)
i
CL(i, j)
j
-1 C=
, c(i,j)
=
-RHj - P=
co(i,j) - cL(i,j)
o(i,
= L
j)- L(i, j)
AtH
- 9L
o(i,, j) -=cL(i, j)
where cL and cH are the low and high temperature calibration frames. As is the case with
the one-point compensation, the gain and offset coefficients correct each pixel in the
compensation frames to their respective means,
JtL and
gtH.
In the next example, the compensation temperatures were 25 0C and 40 0 C. Again,
200-frame averages were constructed in order to calculate the offset and gain coefficients.
These coefficients were applied to the same set of data as the one-point compensation
algorithm. The standard deviation of the corrected images is a measure of the residual
compensation error.
Figure 4-4 is the graph of the compensation error as a function of the blackbody
temperature. As with the one-point compensation, the minimum error is achieved at the
compensation points.
AIC~
1.
1.
3,..
80.
i
w.
LU
cc
cc
rr"
0.
0.
10
15
20
25
30
35
40
45
Temperature (degrees C)
Figure 4-4: Two-point NUC using 250C and 40 0 C as calibration temperatures
The performance of the two-point nonuniformity compensation algorithm was
considerably better than that of the one-point algorithm.
Figure 4-5 compares the
performance of the two-point technique with the one-point technique and the original
image nonuniformity.
1A
.I IF•A
1
1
h
co
€I)
"13
a
v
LLI
C/3
tV.
CC)
Temperature (degrees C)
Figure 4-5: Comparison of original nonuniformity with one-point and two-point NUC
4.2.3 Temporal Noise Consideration
In the previous treatment of one-point and two-point nonuniformity compensation,
the techniques were applied to averaged frames of data, in order to lessen the effects of
temporal noise. To estimate the effects of the temporal noise on the compensated image,
we can apply the correction coefficients to individual frames of data, rather than the 200frame averages as in the previous sections. Figure 4-6 illustrates the variation in the
individual frames of data after one-point correction. These variations are significantly less
then compensation error that is present in Figure 4-2, and therefore are not the dominant
source of error in the system, except at or very near the calibration temperature.
1.2
1
Mean RMS Error
1.22 Counts
0.044 degrees C
8 0.8
WLU0.6
0.4
0.2
-
I.'
0
50
100
Frame number
150
200
Figure 4-6: Standard deviation of single frames after applying offset correction to 200
consecutive frames (frame rate = 51.44 Hz)
To observe the magnitude of the temporal noise, we examine the response of a
single pixel after compensation. The average response of the individual pixel over the 200
frames is identical to the average corrected value over the array, and the fluctuations,
shown in Figure 4-7, are a result of the temporal noise. The variation in response is
approximately 1.3 counts (0.0460 C). Comparing this value with the one-point and twopoint compensation performance in Figure 4-2 and Figure 4-4, it is clear that this temporal
noise dominates for the entire range of temperatures in the two-point nonuniformity
compensation and at the calibration temperature in the case of one-point nonuniformity
compensation.
0
50
100
Frame number
150
200
Figure 4-7: Temporal variation of one pixel after offset compensation (minus mean pixel
value of 1223.2 counts)
4.2.4 Investigation of Gain and Offset Terms
Once we have the gain and offset terms for a calibration frame, we can return to
the issue of the relative importance of the gain and the offset portions of the
nonuniformity. Histograms of the offset and gain coefficients for the previous two-point
nonuniformity compensation algorithm are presented in Figure 4-8 and Figure 4-9
respectively. From these coefficients we can determine the effects of the gain and offset
terms of the nonuniformity. The contribution of the offset term is its standard deviation,
31.3 counts.
The contribution of the gain term at each temperature is the standard
deviation of the gain coefficients, 0.047 counts, multiplied by the output in counts at that
temperature. For the 250C blackbody, the average output was 1107 counts, which means
the standard deviation of the gain component was 52.0 counts.
This indicates that
compensation for the gain term is indeed important for removing nonuniformity.
Offset (degrees C)
- -
6
)0
Offset (counts)
Figure 4-8: Histogram of Offset Coefficients in 2pt NUC
U
CO
0
E
Z
!5
Gain
Figure 4-9: Histogram of Gain Coefficients in 2pt NUC
From these coefficients, we can make an estimate of the nonuniformity in the
array.
In the previous chapter we assumed that the multiplicative and additive
components dominate the nonuniformity. These components are calculated from the gain
and offset coefficients as follows, where a is the additive component and b is the
multiplicative component,
b(t) = -
1
g(t)
a(t) =
o(t)
--.
g(t)
This relationship will be used in the next chapter, to create nonuniformities in data for the
purposes of testing scene-based algorithm performance.
4.3 Summary
Source-based techniques work very well near the compensation temperatures. The
resulting compensation error, across the wide range of temperatures was far lower than
the original scene nonuniformity. Two-point compensation techniques outperform the
one-point techniques across the 100C - 450C temperature range, on average, by a factor of
18 to 1.
5
Scene-Based Nonuniformity Compensation
In this chapter the characteristics of scene-based nonuniformity compensation
algorithms are examined. The performance of one of these algorithms will be evaluated
and compared to the source-based compensation techniques using both blackbody
measurements and terrain scene data collected using an airborne IR sensor. A method for
determining the parameters for optimal performance, as a function of the temporal
correlation of the data, is developed and tested.
Scene-based nonuniformity compensation techniques use scene data, instead of
blackbody calibration data, to estimate and compensate for array nonuniformities. One
advantage of these techniques is that they are adaptive and can potentially compensate for
drift in FPA response. Another advantage of scene-based techniques is that they do not
require blackbody data, which can simplify the imaging system.
There are, however, potential drawbacks to scene-based techniques. First, the
technique computes estimates of the compensation parameters and may thus result in
additional errors relative to source-based techniques. Also, the scene-based techniques
are only compensation techniques, they do not provide the absolute temperature reference
that is found with source-based methods. Finally, there is an added computational cost
relative to source-based techniques.
The simplest implementation of a scene-based algorithm constructs an estimate of
the offset nonuniformity using some form of weighted averaging over diverse scenes. This
is similar to the one-point source-based compensation. However, as illustrated in Chapter
4, the offset correction only performs well at or near the calibration temperature. The
effect of the scene-based algorithms is to perform the one-point compensation, but with
the adaptive features it is similar to performing one-point compensation with a blackbody
source whose temperature is always the average scene temperature. While this is an
advantage, the performance will depend on the characteristics of the background scene, as
will be discussed later in the chapter.
5.1 Implementation Issues
One implementation is to use a temporal high-pass filter to correct each pixel
x(i,j,n) individually, where n is the frame number and (i,j) denotes the location of the pixel
in the array. In this case, an average of the previous pixel values, f(i,j,n), is constructed,
giving more weight to the more recent pixels, and then subtracted from x(i,j,n) to yield the
compensated pixel value, y(i,j,n). This can be accomplished with the use of a recursively
computable low-pass filter, as follows,
y(i,j, n) = x(i,j, n) - f(i,j,n)
1
m-1
f(i, j, n)= -- x(i,j,n) + - f(i,j,n- 1),
m
m
where m is used to shape the impulse response of the temporal filter. The optimal value
for m depends on the characteristics of the background scene
Since each pixel is corrected independently of the other pixels in the array, there is
a constraint on the background scene. The assumption is that the computed offset, which
is an estimate of the nonuniformity, is the sum of the average value of the nonuniformity
and the average value of the scene at that pixel. In order to make an accurate estimate of
the nonuniformity, we need to guarantee that the average scene radiance that is imaged by
each pixel is the same across the array. If this is not the case, variations in the scene from
pixel to pixel may not be preserved. This is a trivial constraint when applying the scenebased techniques to blackbody data, since the scene radiance is, by definition, constant
across the array. However, this is an issue when we apply the filter to scenes that have
spatial variations.
5.2 Performance
The initial performance measures of this scene-based techniques are made by
applying the temporal high-pass filter to the blackbody data from the CE camera. The
performance can be compared directly to that of the source-based offset compensation
technique. This comparison is not a complete evaluation of the technique since scene
characteristics will affect the performance of the algorithm, but it provides a starting point
for the analysis.
After applying the temporal high-pass filter to blackbody data, we will examine the
performance on synthesized images of a given temporal correlation and imposed
nonuniformity. These images were created by segmenting a large single image obtained
from the Infrared Measurements Sensor (IRMS). The IRMS is a dual waveband (MWIR
and LWIR) scanning system, which can image 200 in azimuth and 2.250 in elevation, and
has an instantaneous field of view (IFOV) of 100 grad.
A metric for determining the
optimal value of m, based on the temporal correlation of the scenes, is developed using
these controlled scenes.
After evaluating the performance on the simulated data, the algorithms are applied
to scene data obtained from the Skyball airborne IR sensor. The Skyball system uses
128x128 HgCdTe FPAs for the MWIR (3.4 - 4.9 im) and LWIR (7.6 - 9.4 gm)
wavebands; in this thesis we use the MWIR waveband data.
The system has a
1.740 x1.740 FOV and an IFOV of 238 gtrad. There are calibration frames preceding
and/or following the scenes, which allow for a comparison between source-based and
scene-based techniques.
5.2.1 Offset Comparison with Source-Based Techniques
We have already examined offset correction for one-point source-based
compensation. To compare the performance of the scene-based temporal high-pass filter
with that of the one-point compensation, we apply the algorithms to the CE camera
images of a 25 0C blackbody, as used in the temporal noise measurements in Chapter 4.
Since the scene is constant, we can examine the steady state performance of the temporal
high-pass filter for various values of the filter parameter m.
The results of applying the temporal high-pass filter are shown in Figure 5-1. The
residual error after compensation is illustrated for three different values of m. As evident
in the graph, the number of frames it takes for the algorithm to reach steady state
performance is proportional to m. As the value of m increases, more frames of data are
required for the filter to adapt to sudden changes in the scene.
In
8'
2
LU•
cc
0
50
100
150
200
Frame Number
Figure 5-1: Performance of scene-based temporal high-pass filter applied to 200 frames of
blackbody data at 250 C
To get a better indication of the performance of the temporal high-pass filter,
Figure 5-2 shows the steady state performance (frames 100-200) for the three values of m
used in Figure 5-1. The general behavior is similar for the three values of m. However,
the lower the value of m, the lower the average steady state error. This is a result of the
filter implementation; for low values of m, more of the current frame is used in the
estimate of the nonuniformity, therefore more of the variations in an individual frame will
be removed. This will have an impact on target detection, since targets may be suppressed
along with the background.
I
I
=2
1.2
m=10
1
8 0.8
m=2
W 0.6
0.4
0.2
n
100
120
160
140
Frame Number
180
200
Figure 5-2: Performance of scene-based temporal high-pass filter applied to 200 frames of
blackbody data at 250 C
In addition to comparing the temporal high-pass filter for different values of m, we
would like to examine the performance relative to the performance of the one-point
compensation discussed in Chapter 4. In Figure 5-3, the results of the temporal high-pass
filter (for m=5) are compared to the results after one-point compensation. The offset for
the one-point compensation is derived from an average of the 200 frames and then applied
to each of the frames individually, as in Figure 4-6.
The one-point compensation
performance provided a measurement of the temporal noise limited performance. In the
case of the temporal high-pass filter, the residual compensation error is lower than that
obtained by the one-point compensation. This results from the use of a fraction of the
current scene in the estimation of the nonuniformity, thus reducing some of the temporal
noise; in the case where we image actual scenes we will expect that this algorithm will also
reduce clutter.
In order to verify that the higher residual error in the one-point compensation is
not due to sensor drift, we also can apply an offset correction which simply subtracts a 5frame local average from each input frame. This is indicated in Figure 5-3 by the dotted
line. If there were significant drift, we would see that the local average would perform
better than the offset calculated by averaging all 200 frames. Since this is not the case,
background suppression, not drift in the sensor, is the reason for the decrease in residual
error in the temporal high-pass filter.
•
I•
1.5
S0.5
ir 0.5
0
20
40
60
80
100
120
140
Frame Number
160
180
200
Figure 5-3: Comparison of temporal high-pass filter, running average, and one-point
compensation applied to 200 frames from CE camera of blackbody at 250 C
5.2.2 Applying Algorithm to Synthesized Scene Data
By applying the scene-based algorithms to images of known background statistics
and nonuniformity, a relationship between the temporal correlation of the scenes and the
m factor in the temporal high-pass filter that yields optimal performance can be
constructed. A rural scene recorded in Harvard, Massachusetts was used in this study; a
portion of the image is shown in Figure 5-4. The mean temperature of the image is 9. 10C
(1671.2 counts) and the standard deviation is 0.6 0C (15.1 counts). This IRMS image was
divided into a sequence of frames, where the apparent rate of motion of the frames is
measured as the horizontal pixel separation between frames. By changing the apparent
rate of motion of the scene, we can create scenes with different temporal correlation
lengths; the temporal correlation function is simply a scaled version of the spatial
correlation function. The rate term is the ratio of the spatial correlation length and the
temporal correlation length,
rate =
Lt
Figure 5-4: Section of IRMS image of Harvard, MA used to test temporal high-pass filter
Figure 5-5 shows the spatial correlation of the portion of the original IRMS image
that was used to create the multiple frames of data. To estimate the spatial correlation
length, we can fit the correlation data, R[n], to an exponential of the form,
R[n] = ae -
+ b,
where L, is the spatial correlation length, and the a and b terms are scaling factors. As is
apparent in Figure 5-5, the horizontal correlation of the image is high. The exponential fit
to the correlation data is also shown in Figure 5-5 and the estimated correlation length is
approximately 2 pixels.
1
1
0.9
0.8
S0.7
E 0.6
0
- 0.5
D 0.4
0.3
0.2
0.1
n
0
10
30
20
Pixel Separation
40
50
Figure 5-5: Horizontal spatial correlation of IRMS image (calculated in 100x100-pixel
blocks).
The processing steps that were used to evaluate the performance of the temporal
high-pass filter are shown in Figure 5-6.
After segmenting the original images,
nonuniformity is imposed. As discussed in Chapter 4, the gain and offset coefficients for a
particular array can be used to estimate the multiplicative and additive factors that
corrupted the original scene.
The gains and offsets used in these cases were the
coefficients that were calculated in Section 4.2.2 for the InSb array. These factors were
applied to the sequence of images in order to create a nonuniformity; this nonuniformity
would be compensated exactly by applying the gain and offset coefficients as previously
calculated.
It is important to note that there is no temporal drift in the imposed
nonuniformity. The advantage of imposing a known nonuniformity on the images is that
the compensated images can be compared directly with the original images.
Figure 5-6: Block diagram of algorithm testing
A spatial high-pass filter (standard Laplacian filter) is applied to reduce scene
clutter for subsequent detection of unresolved targets. The Laplacian filter employed in
three places in Figure 5-6, can be represented as follows:
o0 1
--
0
4
1
4
0 --
1
--
4
4
0
Any difference between the compensated frame and the original image (before the
nonuniformity is imposed) after high-pass filtering is due to error in the nonuniformity
compensation, and will be measured as the standard deviation of the differenced images,
(diff.
The spatial high-pass filter eliminates most of the background clutter in the IRMS
image. The effects of this can be seen in the autocorrelation of the filtered image, which is
shown in Figure 5-7. The autocorrelation of the image, after filtering, drops very quickly
to zero.
1
" 0.5
0
0
-0.5
-0.5
10
20
30
Pixel Separation
40
50
Figure 5-7: Autocorrelation of high-pass filtered IRMS image
The processing in Figure 5-6 was applied to data segmented at different rates, and
for different values for m in the compensation filter. In Figure 5-8, the standard deviation
of the difference between the high-pass filtered images, adiff, is shown as a function of the
frame number and for three different values of m. The larger the value of m, the more
frames are required to construct a good estimate of the nonuniformity. For the case where
m=2, the algorithm reaches the steady state value (Gtdif= 1.2) counts very quickly (less
than 10 frames). For m=25, the steady state value of adie is lower (0.36 counts), however,
more frames are needed to achieve steady state performance. In the case of m=75, steady
state performance has not been achieved in the 169 frames used in this sequence of
images. The effect of large values of m is that when the scene changes rapidly, the
algorithm is slower to adapt and reach steady state performance. Small values of m may
have a faster response to changes, but as evidenced in Figure 5-8, this results in decreased
performance in the steady state.
0
20
40
60
80
100
120
140
160
180
Frame Number
Figure 5-8: Performance of temporal high-pass filter (rate=20)
By constructing these curves for a number of different rates, we can find the value
of adiff in the steady state, which we will use as the performance measure of the algorithm,
for different values of m and the rate. This is depicted in Figure 5-9. The optimal value of
m is the minimum value that achieves a desired steady state performance for a given rate.
The desired steady state performance will depend on the specifics of the application.
1.6
1.4
1.2
1
0.8
0.6
0.4
0.2
0
5
10
15
20
25
30
Filter Parameter m
Figure 5-9: Steady state value of error between compensated and original images after
spatial high-pass filter
As is apparent in Figure 5-9, the steady state performance appears to be a function
of the value of m, and not the rate, or temporal correlation, of the sequence of images.
This is not an unexpected result since the spatial autocorrelation of the filtered IRMS
image drops to nearly zero after just a two pixel offset. The consequence of this is that for
all the examined rates, the sequence of filtered images is temporally uncorrelated and
therefore the performance of the algorithm only depends on the value of m.
The second important characteristic of the steady state performance is the form of
the relation between m and the value of n.diIf we average a number of different scenes,
the residual clutter will decrease by the square root of the number of averaged scenes. As
illustrated in Figure 5-9, the form of adiff as a function of m fits the expected form of
C/sqrt(m) almost exactly. This implies that for scenes with higher contrast, a higher value
of m will be required to achieve a given level of performance. In addition, there will be a
limit to the attainable performance, even if the best estimate of the nonuniformity can be
constructed. The limit will be a result of the temperature variation in the scene, and the
presence of the gain component of the nonuniformity, which will have more of an
influence in scenes with larger temperature variations.
In the next section where we examine the performance of the algorithm on real
sensor data, there is no uniform image with which to compare the compensated image.
Therefore, we must derive performance measures from values we can calculate from the
compensated image. Figure 5-10 plots dim, which we have been using as the measure of
performance, a1(m), the standard deviation after the temporal high-pass filter and the
spatial high-pass filter, and ap, the standard deviation of the original scene (without
nonuniformity imposed) after spatial high-pass filtering. The trend of both adiff and af(m)
is approximately the same, indicating that measuring aK(m) is a valid measure of the
algorithm performance.
This graph also verifies that the compensation is effective. The standard deviation
of the compensated image is close to the standard deviation of the original, uniform
images after high-pass filtering, ap. In addition, the residual nonuniformity, as indicated
by aOd,
is small compared to the standard deviation of the compensated image which
means that our performance is clutter limited. Since a(m) is less than the a,, the scenebased algorithm is removing some high frequency clutter, which is not unexpected since
part of the estimate of the offset coefficient comes from the current scene. This has
implications for the target detection problem. While it may be beneficial to remove
clutter, it can also remove some of the target signature, which may harm detection
capability.
W
I
I
I
I
I
I
5
•4
V
3
LU
v
CD
w
C,)
2
1
diff
a
s,
gl
0
50
100
150
200
250
300
350
Frame Number
Figure 5-10: Comparison of odiff, a( m), and ot as performance measure (standard
deviation of uniform sequence before spatial high-pass filter = 6.97 counts)
5.2.3 Applying Algorithm to Skyball Data
The Skyball data were used to evaluate the performance of both the temporal highpass filter and the source-based techniques. The images used in the analysis were nighttime desert scenes, which were obtained from the HgCdTe FPA operating in the MWIR
waveband. The frame rate for the system was 30 Hz although every tenth frame was used
in this analysis, yielding a frame rate of 3 Hz. Figure 5-11 shows a typical image obtained
from the system; the scene detail is completely dominated by sensor nonuniformity.
· x·~·
·~:~~a
~·;~s·2~·.s·.7i~nz.·17···s-~··.··;.~·~:·:~:·:·:S::y:::::~:y:k~:~::::~:~:~::~:
~:
bX·X;·rz.z:t2S·.~.·:'.
s·~.s·i.·:::~~:::~::::::::':E:~~~'~.:""':'':":~~
RS·X;'':·:·:·~·~~5'"-·
~'~' ;X
"
'X.:;.:~:·:·;iSY.:~:~~~:~:~::ii·:·:·:·:
Sii·f·5:
~
·
·:·):0:·~·~)~·:I·):.';.2;·;·22''"
''..'i:~M8~id:::i:~:~4:~:·:.:·:~:~:::~:~
.~·l.·.I.·.~~z~~.~r·n~~·:·:·5.,~9:·:·
·.s·.·.·:·:·X·:9:·f·2.·.·.r·:·:·:·:;:·:.
:Kxi...........
.......
!i•!•!??:•
...
i??:!:?:?
: ::?~:?
..............
Figure 5-11: Uncompensated image Ifr
Om SkybaUl sensor
Since there were calibration fr-ames taken prior to imaging the background scene,
both the source-based and scene-based compensation techniques can be applied. The
results of applying the one-point and two-point source-based compensation and the
temporal high-pass filter are shown in Figure 5-12. There are significant improvements in
the amount of discernible scene detail after compensation and visually, all three
compensation techniques appear to perform equally well.
(a)
(b)
(c)
Figure 5-12: Compensated Skyball image after (a) Temporal high-pass filter (m=10), (b)
1-point method (35 0 C calibration temperature), and (c) 2-point method (200 C and 35 0C
calibration temperatures)
While both the source and the scene-based algorithms appear to work well
qualitatively, a quantitative performance measure of the different techniques is more
difficult since there is no ideal reference image for comparison with the corrected images.
Instead of differencing the outputs of the different compensation methods, we will
compare the standard deviation of the compensated image, after high-pass filtering, with
the standard deviation of the high-pass filtered original image (see Figure 5-13) as in the
previous section. By filtering the original image with the high-pass filter, we are reducing
most of the background clutter, leaving mainly the high frequency nonuniformity. It is
expected that the compensation will remove much of the high frequency nonuniformity
and therefore the output of the high-pass filter should be due to residual clutter and
compensation error.
Ofnu
Oflipt
Gf2pt
Of(m)
Figure 5-13: Block diagram of performance evaluation
When measuring the standard deviation of the output frames, it is important to
exclude any bad pixels in the array. The bad pixels may flicker, always stay on, or always
stay off. In order to eliminate the effects of these pixels, a bad-pixel map is constructed
using the blackbody calibration frames that precede the desert scenes. In this case, any
pixel whose response was more than three standard deviations from the mean response
was considered to be bad in all subsequent images. The values of these pixels were not
included in the calculations of the standard deviations. In situations where there is no
calibration data, the determination of bad pixels is more difficult, however, the bad pixels
typically constitute a very small portion of the FPA.
The average value of the standard deviation of the scene, without compensation,
but after a spatial high-pass filter, is 1388.2 counts.
The standard deviations, after
compensation, bad pixel removal, and spatial high-pass filtering were calculated for both
the one-point and two-point source-based methods. Figure 5-14 illustrates that both
techniques reduce the spatial standard deviation considerably as compared to the original
image. The two-point nonuniformity compensation eliminates more of the high frequency
components (approximately 98%) than the one-point compensation (approximately 97%);
clearly, the percentage difference between the two is very small.
While one-point
compensation does suppress a significant amount of nonuniformity, it may not be
sufficient for the detection of low contrast targets in clutter.
0%
n^
Q
OU
I%
%
50
'j
40
630
w
cr 20
2 Nd
pt
10
N
I
n
0
50
100
Frame Number
150
200
Figure 5-14: Comparison of one-point and two-point compensation for Skyball data
The results of applying the temporal high-pass filter, for three values of m,
followed by a spatial high-pass filter are shown in Figure 5-15. As expected from the
previous section, the larger the value of m, the more frames are required to achieve the
steady state performance.
A1A^^
o
w
C,,
cn
L_
LU
0
50
100
150
200
Frame Number
Figure 5-15: Standard deviation of compensated image after temporal and spatial highpass filters
The steady state performance (i.e., frames 100-200) of the temporal high-pass
filter is shown in Figure 5-16. As a reference, the results of the two-point nonuniformity
compensation are also included in the figure and the average standard deviation for the
uncompensated, high-pass filtered images is 1388.2 counts. It is apparent that after the
algorithm has obtained enough frames to make a good estimate of the nonuniformity, the
standard deviation of the output image drops considerably.
At%
cn
2
w
2D
100
120
140
160
180
200
Frame Number
Figure 5-16: Comparison of scene-based compensation and two-point compensation after
spatial high-pass filter
The steady state performance indicates that there is additional reduction of the
spatial variation using the scene-based techniques.
The additional drop in standard
deviation is not likely to be due to the effects of high order terms in the nonuniformity,
which we have neglected in this thesis, since these results are consistent with those in
Section 5.2.2 where we only imposed gain and offset nonuniformities.
Therefore, the
scene-based algorithm is reducing clutter in the image as well as nonuniformity.
As
evidenced in Figure 5-16, the smaller the value of m, the more clutter is rejected. For
small values of m, more of the current scene is used in the nonuniformity estimate and
therefore more of the scene clutter will be eliminated. While it may be of some benefit to
reduce the clutter, the consequence is that the targets with the same temporal behavior as
the clutter may be reduced as well. The amount which the target may be reduced and still
be detectable will set a lower limit on the value of m. The optimal value of m for a desired
performance level cannot be determined without the knowledge of specific target
characteristics; the specifics of the detection of low contrast targets in clutter is beyond
the scope of this thesis.
6
Conclusion and Summary
This thesis developed scene-based nonuniformity compensation techniques and
compared the results to source-based techniques.
Nonuniformity characteristics were
examined to motivate the need for nonuniformity compensation and to provide an
indication of the performance of different techniques (e.g., one-point vs. two-point
compensation). Source-based methods were evaluated as a basis for comparison for the
scene-based methods.
It was shown that one-point nonuniformity compensation could achieve the
performance of two-point compensation only at, or near, the compensation temperature.
When applied to blackbodies over a temperature range of 100 C to 450 C, the error after
two-point compensation was, on average, 18 times smaller than the error after one-point
correction. This means that target intensity would have to be 18 times greater for onepoint techniques to achieve comparable detection performance as the two-point
techniques.
However, for scenes with a small dynamic range about the calibration
temperature, one-point compensation may be sufficient.
The performance of the temporal high-pass filter technique, which subtracts a
weighted running average of the previous pixel values from the current value, was shown
to reduce spatial variance below that of the two-point source-based performance for low
contrast scenes, from 43 counts to as low as 17 counts. The reduction in variance was
due to both nonuniformity compensation and suppression of scene clutter.
While
background rejection may be beneficial, it may come at the expense of reducing the target
intensity and consequently, target detection capabilities. Therefore, optimal scene-based
compensation performance cannot be evaluated independently of target characteristics.
There are a number of issues that could be examined in more depth in a future
study. The data sets used in this analysis came from multiple sensors, which prevented a
comprehensive model of performance. A full set of data from one FPA would allow for
the nonuniformity analysis, as performed in Chapter 3, to be compared directly to the
performance of various scene and source-based algorithms.
The analysis for this thesis was performed on scenes with low contrast and high
spatial and temporal correlation. A similar analysis on scenes with a variety of spatial and
temporal characteristics would provide a more thorough evaluation of these methods.
Finally, the effects of compensation algorithms on target detection were not
directly examined.
An evaluation of algorithm performance is incomplete without
knowledge of target characteristics. Future work could investigate the trade-off between
additional clutter rejection in the scene-based techniques and the potential to decrease
target detection capabilities.
7
Bibliography
1. Ballingall, R.A. 1990. Review of Infrared Focal Plane Arrays. SPIE Infrared
Technology and Applications 1320 :70-87.
2. Blumenau, P.M., et al. 1994. Non-uniformity compensation for IR focal plane arrays.
Paper presented at IRIS Specialty Group on Passive Sensors, Sandia National Lab,
Kirland AFB, Albuquerque.
3. Boreman, G.D. and C. Costanzo. 1987. Compensation for gain nonuniformity in
HgCdTe infrared charge-coupled-device focal planes. OpticalEngineering26, no. 10
(October): 981-984.
4. Broekaert, M. and B.N. du Payrat. 1994. Nonlinearity and nonuniformity corrections
for the IRIS family of IRCCD thermal imagers. SPIE Infrared Technology XX 2269:
507-523.
5. Cantella, M.J. 1988. Space Surveillance With Medium-Wave Infrared Sensors. The
Lincoln LaboratoryJournal 1, no. 1: 75-88.
6. Cantella, M.J. 1993. Staring Sensor Systems. In The Infraredand Electo-Optical
Systems Handbook. Vol. 5, Passive Electro-OpticalSystems, ed. Stephen Campana,
157-207. Ann Arbor: Infrared Infromation Analysis Center; Bellingham, Wash.: SPIE
Optical Engineering Press.
7. Cantella, M.J., et al. 1989. Low-background application of Schottky-barrier IR
sensors. SPIE Optical Sensors and ElectronicPhotography 1071: 12-30.
8. Carrison, C.L. and N.A. Foss. 1980. Fixed pattern noise compensation techniques for
staring infrared focal planes. OpticalEngineering 19, no. 5 (September/October):
753-757.
9. Caulfield, J.T., et al. 1993. Performance of Real-Time Adaptive Nonuniformity
Correction Techniques for IRFPAs. Proc. IRIS Passive Sensors 1: 151-166.
10. Cheung, L., E. Dereniak, and D.Perry. 1988. Computer simulation of spatial
nonuniformity correction in a staring sensor. SPIE InfraredTechnology XIV 972: 6582.
11. Descour, M. and E. Dereniak. 1992. Functional aspects of the retina relating to
infrared focal plane arrays. SPIE InfraredDetectors andFocalPlane Arrays 11 1685:
110-117.
12. Fenner, J.W., S.H. Simon, and D.D. Eden. 1994. Design of a IRFPA Nonuniformity
Correction Algorithm to be implemented as a Real-time Hardware Prototype. SPIE
2225: 350-358.
13. Greene, T.F. 1988. Infrared sensor test requirements and critical issues. SPIE
Infrared Scene Simulation: Systems, Requirements, Calibration,Devices and
Modeling 940: 18-24.
14. Greiner, M.E., R.L. Smith, and H.A. Timlin. 1994. Uniformity and stability in 2dimensional infrared focal plane arrays. SPIE 2225: 176-184.
15. Holst, G.C. 1993. Infrared Imaging System Testing. The Infraredand ElectoOptical Systems Handbook. Vol. 4, Elecro-OpticalSystems Design, Analysis, and
Testing, ed. Michael C. Dudzik, 195-243. Ann Arbor: Infrared Infromation Analysis
Center, Bellingham, Wash.: SPIE Optical Engineering Press.
16. Cincinnati Electronics. 1993. IRC-160/IRC-160ST User Manual.
17. Karins, J.P. 1992. Models of nonlinearities in focal plane arrays. SPIE Infrared
Detectors andFocal PlaneArrays II 1685: 103-109.
18. Kimata, M., et al. 1987. 256x256 element platinum silicide Schottky-barrier infrared
charge-coupled device image sensor. OpticalEngineering 26, no. 3 (March): 209215.
19. Kosonocky, W.F. 1987. Infrared Image Sensors with Schottky-Barrier Detectors.
SPIE Technologiesfor Optoelectronics869: 90-106.
20. Kruer, M.R., D.A. Scribner, and J.M. Killany. 1987. Infrared focal plane array
technology development for Navy applications. OpticalEngineering 26, no. 3
(March): 182-190.
21. Massie, M.A., et al. 1992. Neuromorphic infrared focal plane performs on-plane local
contrast enhancement, spatial and temporal filtering. SPIE InfraredTechnology XVIII
1762: 361-375.
22. Milton, A.F., F.R. Barone, and M.R. Kruer. 1985. Influence of nonuniformity on
infrared focal plane array performance. OpticalEngineering 24, no. 5
(September/October): 855-862.
23. Mooney, J.M. 1991. Effect of spatial noise on the minimum resolvable temperature
of a staring sensor. Applied Optics 30, no. 23 (August): 3324-3332.
24. Mooney, J.M., and E.L Dereniak. 1987. Comparison of the performance limit of
Schottky-barrier and standard infrared focal plane arrays. Optical Engineering 26, no.
3 (March): 223-227.
25. Mooney, J.M., et al. 1989. Responsivity nonuniformity limited performance of
infrared staring cameras. OpticalEngineering 28, no. 11 (November): 1151-1161.
26. O'Neil, W.F. 1992. Dithered Scan Detector Compensation. Proc. IRIS Passive
Sensors 1:123-134.
27. ONeil, W.F., et al. 1993. Experimental Performance of a Dither-Scanned InSb Array.
Proc. IRIS Passive Sensors 1:167-176.
28. Palmer, J.M. 1994. The limits of radiometry. SPIE InfraredTechnology XX 2269:
592-602.
29. Perry, D.L. 1992. Linear theory of nonuniformity correction in platinum silicide focal
plane arrays. SPIE InfraredTechnology XVIII 1762: 60-69.
30. Perry, D.L. and E.L. Dereniak. 1993. Linear theory of nonuniformity correction in
infrared staring sensors. OpticalEngineering 32, no. 8 (August): 1854-1859.
31. Poropat, G.V. 1989. Nonlinear compensation for responsivity nonuniformities in
cadmium mercury telluride focal plane detector arrays for use in the 8 to 12 jpm
spectral region. Optical Engineering 28, no. 8 (August): 887-896.
32. Scribner, D.A., et al. 1991. Infrared Focal Plane Array Technology. Proceedings of
the IEEE 79, no. 1 (January): 66-85.
33. Scribner, D.A., et al. 1987. Measurement, characterization, and modeling of noise in
staring infrared focal plane arrays. SPIE InfraredSensors andSensor Fusion 782:
147-160.
34. Scribner, D.A., et al. 1990. Nonuniformity correction for staring IR focal plane
arrays using scene-based techniques. SPIE InfraredDetectors and FocalPlane
Arrays 1308: 224-233.
35. Scribner, D.A., et al. 1987. Physical limitations to nonuniformity correction in IR
focal plane arrays. SPIE FocalPlaneArrays: Technology and Applications 865: 185202.
36. Scribner, D.A., et al. 1988. Spatial noise in staring IR focal plane arrays. SPIE
InfraredDetectors andArrays 930: 56-63.
37. Scribner, D.A., et al. 1989. Test and Evaluation of Stability in IR Staring Focal Plane
Arrays After Nonuniformity Correction. SPIE Test and Evaluationof Infrared
Detectors and Arrays 1108: 255-264.
38. Scribner, D.A., et al. 1991. Adaptive Nonuniformity Correction for IR Focal Plane
Arrays Using Neural Networks. SPIE InfraredSensors: Detectors, Electronics, and
Signal Processing 1541: 100-109.
39. Scribner, D.A., et al. 1992. An Imaging Metric for Infrared Focal Plane Arrays.
SPIE Test and Evaluationof IR Detectors andArrays 11 1686:136-144.
40. Shepherd, F.D. and J.M. Mooney. 1987. Design Considerations for IR Staring-Mode
Cameras. SPIE Electro-OpticalImaging Systems Integration762: 35-50.
41. Shepherd, F.D. and J.M. Mooney. 1987. Non-uniformity Limited Performance of IR
Staring Cameras. Proc. IRIS Imaging:141-152.
42. Shumaker, D.L., J.T. Wood, and C.R. Thacker. 1988. FLUR Performance Handbook.
Alexandria, VA: DCS Corporation.
43. Villiani, T.S., et al. 1989. Construction and Performance of a 320 X 244 - Element
IR-CCD Imager with PtSi Schottky-Barrier Detectors. SPIE InfraredDetectors,
FocalPlaneArrays, and Imaging Sensors 1107: 9-21.
44. Vincent, J.D. 1990. Fundamentalsof InfraredDetector Operationand Testing.
New York: John Wiley and Sons.
45. Wolfe, W.L. and G.J. Zissis, eds. 1985. The InfraredHandbook. ERIM IR
Information and Analysis Center for Office of Naval Research.