Document 10945563
advertisement

Hindawi Publishing Corporation
Mathematical Problems in Engineering
Volume 2009, Article ID 191760, 17 pages
doi:10.1155/2009/191760
Research Article
Switching Signal Design for Global Exponential
Stability of Uncertain Switched Neutral Systems
Ker-Wei Yu
Department of Marine Engineering, National Kaohsiung Marine University, Kaohsiung 811, Taiwan
Correspondence should be addressed to Ker-Wei Yu, kwyu@mail.nkmu.edu.tw
Received 22 March 2009; Revised 22 June 2009; Accepted 9 July 2009
Recommended by Tamas Kalmar-Nagy
The switching signal design for global exponential stability of switched neutral systems is
investigated in this paper. LMI-based delay-dependent and delay-independent criteria are
proposed to guarantee the global stability via the constructed switching signal. Razumikhin-like
approach is used to find the stability results. Finally, some numerical examples are illustrated to
show the main results.
Copyright q 2009 Ker-Wei Yu. This is an open access article distributed under the Creative
Commons Attribution License, which permits unrestricted use, distribution, and reproduction in
any medium, provided the original work is properly cited.
1. Introduction
It is well known that the existence of delay in a system may cause instability or bad
system performance in control systems. Time-delay phenomenon appears in many practical
systems, such as AIDS epidemic, aircraft stabilization, chemical engineering systems, inferred
grinding model, manual control, neural network, nuclear reactor, population dynamic model,
rolling mill, ship stabilization, and systems with lossless transmission lines. Hence stability
analysis for time-delay systems has been considered in the recent years 1–3. Neutral
systems are described by functional differential equations which depend on the delays of
state and state derivative. Some practical examples of neutral systems include distributed
networks, heat exchanges, and processes including steam 4.
Switched system is a class of hybrid systems which is consisting of several subsystems
and uses the switching signal to specify which subsystem is activated to the system
trajectories at each instant of time. Some examples for switched systems are automated
highway systems, constrained robotics, power systems and power electronics, transmission
and stepper motors 5. Stability analysis of switched time-delay systems has been an
attractive research topic 6–13. It is interesting to note that the stability for each subsystem
cannot imply that of the overall system under arbitrary switching signal 9. Another
interesting fact is that the stability of a switched system can be achieved by choosing
2
Mathematical Problems in Engineering
the switching signal even when each subsystem is unstable 6, 7, 10. In this paper, the
switching signal design will be considered for uncertain switched neutral systems with mixed
delays. The switching signal will be proposed to guarantee the stability of switched system
even when each subsystem is unstable. Based on Razumikhin-like approach 11, delaydependent and delay-independent results are provided. New and flexible LMI conditions
are proposed to design the switching signal which guarantees the global exponential and
asymptotic stability of uncertain switched neutral systems. Some numerical examples are
provided to demonstrate the use of our results.
The notation used throughout this paper is as follows. For a matrix A, we denote the
transpose by AT , spectral norm by A, symmetric positive negative definite by A > 0 A <
0, maximal eigenvalue by λmax A, and minimal eigenvalue by λmin A. A ≤ B means that
matrix B − A is symmetric positive semidefinite. For two sets X and Y , X − Y means that the
set of all points in X that
are not in Y . For a vector x, we denote the Euclidean norm by x
and xt s sup−H≤θ≤0 xt θ2 ẋt θ2 . I denotes the identity matrix. Rn denotes
n-dimensional real space.
2. Problem Formulations and Main Results
Consider the following switched neutral system with mixed time delays:
ẋt − Dẋt − τ A0σ xt A1σ xt − ht,
xt φt,
t ≥ 0,
t ∈ −H, 0,
2.1
where x ∈ Rn , xt is state at time t defined by xt θ : xt θ, ∀θ ∈ −H, 0, σ is a switching
signal which is a piecewise constant function and may depend on t or x, σ, taking its values in
the finite set {1, 2, . . . , N}, and time-varying delay satisfies 0 ≤ ht ≤ hM , ḣt ≤ hD , hM > 0,
τ > 0, H max{hM , τ}. Matrices D, A0i , and A1i ∈ Rn×n , i 1, 2, . . . , N, are constant, and the
initial vector φ ∈ C1 , where C1 is the set of differentiable functions from −H, 0 to Rn .
Now we define some functions λi t, i 1, 2, . . . , N, that will be used to represent our
system:
λi t ⎧
⎨1,
σ i,
⎩0,
otherwise,
i 1, 2, . . . , N.
2.2
The switched system in 2.1 can be rewritten as follows:
ẋt − Dẋt − τ N
λi t{A0i xt A1i xt − ht},
i1
xt φt,
where λi t is defined in 2.2 and
N
i1
t ∈ −H, 0,
λi t 1, ∀t ≥ 0.
t ≥ 0,
2.3
Mathematical Problems in Engineering
3
Lemma 2.1 see 14. Let U, V , W, and M be real matrices of appropriate dimensions with M
satisfying M MT , then
M UV W W T V T UT < 0 ∀V T V ≤ I,
2.4
if and only if there exists a scalar ε > 0 such that
M ε−1 · UUT ε · W T W M ε−1 · UUT ε−1 · εWT εW < 0.
Lemma 2.2 Schur complement of 15. For a given matrix S S11 S12
2.5
with S11 ST11 , S22 ST12 S22
ST22 , the following conditions are equivalent:
1 S < 0,
T
2 S22 < 0, S11 − S12 S−1
22 S12 < 0.
Assumption 2.3. Assume that there exists a convex combination F Hurwitz, where 0 ≤ αi ≤ 1 and N
i1 αi 1.
N
i1
αi A0i such that F is
Since F is Hurwitz, there exist positive definite matrices P and Q satisfying
F T P P F ≤ −Q.
2.6
Define some domains
Ωi x ∈ Rn : xT A0i T P P A0i x ≤ −xT Qx ,
From the similar proof of 7, it is easy to show
N
i1
i ∈ {1, 2, . . . , N}.
2.7
Ωi Rn . Construct some domains
Ω1 Ω1 , Ω2 Ω2 − Ω1 , Ω3 Ω3 − Ω1 − Ω2 , . . . , ΩN ΩN − Ω1 − · · · − ΩN−1 .
2.8
n
We can obtain N
j, where Φ is an empty set. If Assumption 2.3
i1 Ωi R and Ωi ∩ Ωj Φ, i /
is satisfied, then the following results can be derived:
xT A0i T P P A0i x ≤ −xT Qx,
xt ∈ Ωi .
2.9
Define the following switching function:
σ i,
∀x ∈ Ωi .
2.10
Definition 2.4 see 14. The system 2.1 with the designed switching signal is said to be the
globally exponentially stabilizable with convergence rate α > 0 by the designed switching
signal, if there are two positive constants α and Ψ such that
xt ≤ Ψ · e−αt ,
t ≥ 0.
2.11
4
Mathematical Problems in Engineering
Now we present a result to design the switching signal that guarantees global
exponential stability of system 2.1.
Theorem 2.5. Assume that for D < 1, 0 < α < −ln D/τ, 0 ≤ αi ≤ 1, i 1, 2, . . . , N, and
N
i1 αi 1, there exist some n × n matrices P, Q, R1 , R2 > 0, such that the following LMI conditions
hold for all i 1, 2, . . . , N:
⎡
⎤
Ξ11i Ξ12i Ξ13i
⎢
⎥
⎥
Ξi ⎢
⎣ ∗ Ξ22i Ξ23i ⎦ < 0,
∗
∗ Ξ33i
F T P P F Q < 0,
F
N
2.12
αi A0i ,
i1
where
Ξ11i 2α · P R1 R2 − Q,
Ξ22i 2α · DT P D − e−2ατ · R1 ,
Ξ12i −2α · P D − A0i T P D,
Ξ23i −DT P A1i ,
Ξ13i P A1i ,
Ξ33i −1 − hD · e−2αhM · R2 .
2.13
Then the system 2.1 is globally exponentially stabilizable with convergence rate α by the switching
signal given in 2.10.
Proof. Define the Lyapunov functional
V xt e2αt · xt − Dxt − τT P xt − Dxt − τ
t
t
e2αs · xT sR1 xsds e2αs · xT sR2 xsds,
t−τ
2.14
t−ht
where P, R1 , R2 > 0. The time derivatives of V xt along the trajectories of system 2.3 under
the switching function 2.10 satisfy
V̇ xt e2αt · 2α · xt − Dxt − τT P xt − Dxt − τ
e2αt ·
N
λi t A0i xt A1i xt − htT P xt − Dxt − τ
i1
e2αt ·
N
λi t xt − Dxt − τT P A0i xt A1i xt − ht
i1
e2αt · xT tR1 xt − e−2ατ · xT t − τR1 xt − τ
e2αt · xT tR2 xt − 1 − ḣt · e−2αht · xT t − htR2 xt − ht .
2.15
Mathematical Problems in Engineering
5
By the condition 2.9 and switching function 2.10, we obtain
V̇ xt ≤ e2αt ·
N
λi t · X T · Ξi · X ,
2.16
i1
where Ξi , i 1, 2, . . . , N, are defined in 2.12, X T xT t xT t − τ
2.16 with Ξi < 0, we have
V xt ≤ V x0 ,
xT t − ht. From
t ≥ 0,
2.17
where
V x0 ≤ δ1 · x0 2s ,
δ1 λmax P 1 D2 τ · λmax R1 hM · λmax R2 .
2.18
From 2.14, we have
2
λmin P · e2αt · ℘t ≤ e2αt · ℘T tP ℘t ≤ V xt ≤ δ1 · x0 2s ,
2.19
where ℘t xt − Dxt − τ. From 2.19, we can obtain
xt ℘t Dxt − τ ≤ D · xt − τ ℘t ≤ D · xt − τ δ2 · e−αt ,
t ≥ 0,
2.20
where δ2 δ1 /λmin P · x0 s . Since D < 1 and τ > 0, we can choose a sufficiently
small positive constant ξ α < −ln D/τ satisfying D · eξτ < 1. By the Razumikhin-like
approach of 14, we have
xt ≤ x0 s δ2
· e−ξt ,
1 − Deξh
t ≥ 0.
2.21
This completes the proof.
Consider the following uncertain switched neutral system with mixed time delays:
ẋt − Dẋt − τ A0σ ΔA0σ txt A1σ ΔA1σ txt − ht,
xt φt,
t ≥ 0,
t ∈ −H, 0,
2.22a
2.22b
where ΔA0i t and ΔA1i t are some perturbed matrices and satisfy the following condition:
ΔA0i t ΔA1i t Mi Fi t N0i N1i ,
∀i ∈ {1, 2, . . . , N}, t ≥ 0,
2.22c
6
Mathematical Problems in Engineering
where Mi , N0i , and N1i , i 1, 2, . . . , N, are some given constant matrices with appropriate
dimensions, and Fi t, i 1, 2, . . . , N, are unknown matrices representing the parameter
perturbation which satisfy
FiT tFi t ≤ I,
∀i ∈ {1, 2, . . . , N}, t ≥ 0.
2.23
The uncertain switched system in 2.22a–2.22c can be rewritten as follows:
ẋt − Dẋt − τ N
λi t{A0i ΔA0i txt A1i ΔA1i txt − ht},
i1
xt φt,
t ≥ 0,
2.24
t ∈ −H, 0,
where λi t is defined in 2.2 and N
i1 λi t 1, ∀t ≥ 0.
Now we consider the exponential stability for uncertain switched system 2.22a–
2.22c.
Theorem 2.6. Assume that for D < 1, 0 < α < −ln D/τ, 0 ≤ αi ≤ 1, i 1, 2, . . . , N, and
N
i1 αi 1, there exist constants εi > 0, i 1, 2, . . . , N, and some n × n matrices P, Q, R1 , R2 > 0,
such that the following LMI conditions hold for all i 1, 2, . . . , N:
⎤
⎡
Ξ11i Ξ12i Ξ13i Ξ14i Ξ15i
⎥
⎢
⎢ ∗ Ξ
0 ⎥
⎥
⎢
22i Ξ23i Ξ24i
⎥
⎢
⎥
⎢
Ξi ⎢ ∗
∗ Ξ33i 0 Ξ35i ⎥ < 0,
⎥
⎢
⎥
⎢
⎢ ∗
∗
∗ Ξ44i 0 ⎥
⎦
⎣
∗
∗
∗
∗ Ξ55i
F T P P F Q < 0,
F
N
2.25
αi A0i ,
i1
where Ξjki , j, k 1, 2, 3, are defined in 2.12
Ξ14i P Mi ,
T
Ξ15i εi · N0i
,
Ξ24i −DT P Mi ,
T
Ξ35i εi · N1i
,
Ξ44i Ξ55i −εi · I. 2.26
Then the system 2.22a–2.22c is globally exponentially stabilizable with convergence rate α by the
switching signal given in 2.10.
Proof. The time derivatives of V xt in 2.14 along the trajectories of system 2.22a–2.22c
under the switching function 2.9 satisfy
V̇ xt ≤ e2αt ·
N
i1
i · X ,
λi t · X T · Ξ
2.27
Mathematical Problems in Engineering
7
where
⎡
P Mi
⎤
⎢
⎥
i Ξi ⎢−DT P Mi ⎥Fi t N0i
Ξ
⎣
⎦
0
⎡ T⎤
N0i
⎥ T T
⎢
T
⎢
0 N1i ⎣ 0 ⎥
⎦Fi t Mi P −Mi P D 0 .
T
N1i
2.28
i < 0. By the same
By Lemmas 2.1 and 2.2, the condition Ξi < 0 in 2.25 is equivalent to Ξ
derivation of Theorem 2.5, this proof can be completed.
If we choose the convergence rate α 0, we can obtain the following delayindependent condition for the global asymptotic stability of system 2.22a–2.22c.
Corollary 2.7. Assume that for D < 1, 0 ≤ αi ≤ 1, i 1, 2, . . . , N, and N
i1 αi 1, there exist
constants εi > 0, i 1, 2, . . . , N, some n × n matrices P, Q, R1 , R2 > 0, such that the following LMI
conditions hold for all i 1, 2, . . . , N:
⎡
11i Ξ
12i
Ξ
⎢
⎢ ∗ Ξ
22i
⎢
⎢
i ⎢
Ξ
⎢ ∗
∗
⎢
⎢
⎢ ∗
∗
⎣
∗
∗
13i Ξ
14i Ξ
15i
Ξ
23i Ξ
24i
Ξ
33i
Ξ
0
∗
44i
Ξ
∗
∗
F T P P F Q < 0,
F
⎤
⎥
0 ⎥
⎥
⎥
⎥
Ξ35i ⎥ < 0,
⎥
⎥
0 ⎥
⎦
2.29
55i
Ξ
N
αi A0i ,
i1
where
11i R1 R2 − Q,
Ξ
22i −R1 ,
Ξ
12i −A0i T P D,
Ξ
23i −DT P A1i ,
Ξ
35i εi · N T ,
Ξ
1i
13i P A1i ,
Ξ
24i −DT P Mi ,
Ξ
14i P Mi ,
Ξ
15i εi · N T ,
Ξ
0i
33i −1 − hD · R2 ,
Ξ
44i Ξ
55i −εi · I.
Ξ
2.30
Then the system 2.22a–2.22c is globally asymptotically stabilizable by the switching signal given
in 2.10.
8
Mathematical Problems in Engineering
If D 0, Corollary 2.7 can be reduced to the following corollary.
Corollary 2.8. Assume that for some constants αi , i 1, 2, . . . , N, there exist constants εi > 0,
i 1, 2, . . . , N, some n × n matrices P, Q, R2 > 0, such that the following LMI conditions hold for all
i 1, 2, . . . , N:
⎡
⎢Ξ11i
⎢
⎢
⎢ ∗
⎢
Ξ
i ⎢
⎢ ∗
⎢
⎣
∗
⎤
Ξ
12i Ξ13i Ξ14i ⎥
⎥
⎥
Ξ
0 Ξ
22i
24i ⎥
⎥ < 0,
⎥
∗ Ξ33i 0 ⎥
⎥
⎦
∗
∗ Ξ44i
F T P P F Q < 0,
F
N
2.31
αi A0i ,
i1
where
Ξ
11i R2 − Q,
Ξ
12i P A1i ,
Ξ
13i P Mi ,
T
Ξ
24i εi · N1i ,
T
Ξ
14i εi · N0i ,
Ξ
22i −1 − hD · R2 ,
Ξ
33i Ξ44i −εi · I.
2.32
Then the system 2.22a–2.22c is globally asymptotically stabilizable by the switching signal given
in 2.10.
Assumption 2.9. Assume that there exists a convex combination F N
i1 αi A0i , some positive
definite matrices P and Q, some matrices Si , i 1, 2, . . . , N, such that
FT P P F N
αi · Si STi < −Q,
2.33
i1
where 0 ≤ αi ≤ 1 and
N
i1
αi 1.
Define some domains
i x ∈ Rn : xT A0i T P P A0i Si ST x ≤ −xT Qx ,
Ω
i
From the similar proof of 7, it is easy to show
i ∈ {1, 2, . . . , N}.
2.34
N n
i1 Ωi R . Construct some domains
1 Ω
1, Ω
2 Ω
2 − Ω
1, Ω
3 Ω
3 − Ω
1 − Ω
2, . . . , Ω
N Ω
N − Ω
1 − ··· − Ω
N−1 .
Ω
2.35
Mathematical Problems in Engineering
9
n
j, where Φ is an empty set. If Assumption 2.9
We can obtain N
i1 Ωi R and Ωi ∩ Ωj Φ, i /
is satisfied, then the following results can be derived:
xT A0i T P P A0i Si STi x ≤ −xT Qx,
i.
xt ∈ Ω
2.36
Define the following switching function:
σ i,
i.
∀x ∈ Ω
2.37
Remark 2.10. In 6, 7, 10, their assumption is given by
F1T P P F1 −Q,
2.38
where F1 N
i1 αi · A0i A1i . We can see that our Assumption 2.9 is more flexible with
Si P A1i , ∀i 1, 2, . . . , N. The main difference of Assumptions 2.3 and 2.9 is that some
matrices Si are introduced in Assumption 2.9. These matrices play a key role to derive the
delay-dependent results.
Theorem 2.11. Assume that for D < 1, 0 < α < −ln D/τ, 0 ≤ αi ≤ 1, i 1, 2, . . . , N, and
N
i1 αi 1, there exist constants εi > 0, i 1, 2, . . . , N, some n × n matrices P, Q, R1 , R2 , R3 , R4 > 0,
and some n × n matrices R12 , U, Si , V1i , V2i , and V3i , i 1, 2, . . . , N, such that the following LMI
conditions hold for all i 1, 2, . . . , N:
⎡
Σ11i Σ12i Σ13i
⎢
⎢ ∗ Σ22i 0
⎢
⎢
⎢ ∗
∗ Σ33i
⎢
⎢
⎢ ∗
∗
∗
⎢
Σi ⎢
⎢ ∗
∗
∗
⎢
⎢
⎢ ∗
∗
∗
⎢
⎢
⎢ ∗
∗
∗
⎣
∗
∗
∗
FT P P F N
Σ14i Σ15i Σ16i Σ17i Σ18i
Σ24i Σ25i
0
Σ27i
Σ34i Σ35i Σ36i Σ37i
Σ44i Σ45i
∗
0
Σ55i Σ56i
0
∗
∗
Σ66i
0
∗
∗
∗
Σ77i
∗
∗
∗
∗
αi · Si STi Q < 0,
i1
R1 R12
∗
Σ47i
R2
⎤
⎥
0 ⎥
⎥
⎥
0 ⎥
⎥
⎥
0 ⎥
⎥
⎥ < 0,
Σ58i ⎥
⎥
⎥
0 ⎥
⎥
⎥
0 ⎥
⎦
Σ88i
F
N
i1
!
> 0,
αi A0i ,
2.39
10
Mathematical Problems in Engineering
where
Σ11i 2α · P − Q R1 R3 − V1i − V1iT ,
Σ13i −2αP D − A0i T P D − STi D,
Σ12i R12 AT0i UT ,
Σ14i −A0i T UT D,
Σ15i P A1i − Si − V2i V1iT ,
Σ22i
T
Σ16i −Si − V3i V1iT , Σ17i P Mi , Σ18i εi · N0i
,
R2 h2M · R4 − U − UT , Σ24i U UT D, Σ25i UA1i , Σ27i UMi ,
Σ34i −e−2ατ · R12 , Σ35i −DT P A1i DT Si , Σ36i DT Si ,
−e−2ατ · R2 − DT U UT D, Σ45i −DT UA1i , Σ47i −DT UMi ,
Σ33i 2αDT P D − e−2ατ · R1 ,
Σ37i −DT P Mi ,
Σ44i
Σ55i −1 − hD · e−2αhM · R3 V2i V2iT ,
Σ56i V3i V2iT ,
Σ66i −e−2αhM · R4 V3i V3iT ,
T
Σ58i εi · N1i
,
Σ77i Σ88i −εi · I.
2.40
Then the system 2.22a–2.22c is globally exponentially stabilizable with convergence rate α by the
switching signal given in 2.37.
Proof. Define the Lyapunov functional
V xt e2αt · xt − Dxt − τT P xt − Dxt − τ
!
!
t
T
R1 R12 xs
2αs
T
ds
e · x s ẋ s
2.41
∗ R2 ẋs
t−τ
t
t
2αs
T
e · x sR3 xsds hM ·
e2αs · s − t − hM ẋT sR4 ẋsds,
t−ht
where P, R3 , R4 > 0,
t−hM
R1
2.24 satisfy
R12
∗ R2
> 0. The time derivatives of V xt along the trajectories of system
V̇ xt e2αt · 2α · xt − Dxt − τT P xt − Dxt − τ
e
2αt
·
N
"
λi t
A0i Si ΔA0i txt − Si ·
t
ẋsds
t−ht
i1
⎤
#T
A1i ΔA1i t − Si xt − ht
e
2αt
·
N
i1
P xt − Dxt − τ⎦
"
T
λi t xt − Dxt − τ P
A0i Si ΔA0i txt − Si ·
t
ẋsds
t−ht
#!
A1i ΔA1i t − Si xt − ht
Mathematical Problems in Engineering
e
2αt
11
R1 R12
· xT t ẋT t
∗ R2
−e
−2ατ
!
!
xt
ẋt
R1 R12
· xT t − τ ẋT t − τ
∗ R2
!
xt − τ
!!
ẋt − τ
e2αt · xT tR3 xt − 1 − ḣt · e−2αht · xT t − htR3 xt − ht
e
2αt
·
h2M
· ẋ tR4 ẋt − hM ·
T
!
t
e
2αs−t
· ẋ sR4 ẋsds ,
T
t−hM
2.42
where Si P Si . By the inequality in 1, page 322, we have
−hM ·
t
e
2αs
· ẋ sR4 ẋsds ≤ −ht · e
T
2αt
·e
−2αhM
·
t
t−hM
ẋT sR4 ẋsds
t−ht
≤ −e2αt · e−2αhM ·
!T
t
ẋsds
t−ht
!
t
R4
2.43
ẋsds .
t−ht
By system 2.24 and Leibniz-Newton formula, we have
N
λi t · e
2αt
·
t
N
λi t · e
V1i xt V2i xt − ht V3i
2αt
!
t
ẋsds
t−ht
· V1i xt V2i xt − ht V3i
!T
t
ẋsds
t−ht
i1
×
ẋsds− xt xt − ht
t−ht
i1
!T
t
!
ẋsds − xt xt − ht 0,
t−ht
− e2αt · ẋt − Dẋt − τT U UT ẋt − Dẋt − τ
N
λi t · e2αt · ẋt − Dẋt − τT U{A0i ΔA0i txt A1i ΔA1i txt − ht}
i1
N
λi t · e2αt ·{A0i ΔA0i txt A1i ΔA1i txt − ht}T UT ẋt− Dẋt − τ 0.
i1
2.44
By the conditions 2.42–2.44, we obtain the following result:
V̇ xt ≤ e2αt ·
N
i1
λi t · X T · Σi · X ,
2.45
12
Mathematical Problems in Engineering
where
X x t ẋ t x t − τ ẋ t − τ x t − ht
T
T
T
T
T
!
t
ẋ sds ,
T
T
t−ht
⎡
Σ11i Σ12i Σ13i
⎢
⎢ ∗ Σ22i 0
⎢
⎢
⎢ ∗
∗ Σ33i
⎢
Σi ⎢
⎢ ∗
∗
∗
⎢
⎢
⎢ ∗
∗
∗
⎣
∗
∗
Σ24i Σ25i
Σ34i Σ35i
Σ44i Σ45i
∗
∗
Σ55i
∗
∗
⎤
⎡
⎤
⎡ T ⎤T
N0i
⎥
⎥ ⎢
⎢
⎥
⎢
⎥
⎢ 0 ⎥
0 ⎥
⎥ ⎢ UMi ⎥
⎢
⎥
⎥
⎥ ⎢
⎢
⎥
⎢ −DT P Mi ⎥
⎢ 0 ⎥
Σ36i ⎥
⎥
⎥ ⎢
⎢
⎥
⎥F t⎢
⎥⎢ T
⎥
⎢−D UMi ⎥ i ⎢ 0 ⎥
0 ⎥
⎥
⎥ ⎢
⎢
⎥
⎥
⎥ ⎢
⎢
⎥
T⎥
⎢
⎥
⎥
⎢
Σ56i ⎦ ⎣
0
⎦
⎣N1i ⎦
0
Σ66i
0
Σ14i Σ15i Σ16i
P Mi
2.46
⎡ T⎤
⎤T
⎡
N0i
P Mi
⎢
⎥
⎢
⎥
⎢ 0 ⎥
⎢ UMi ⎥
⎢
⎥
⎢
⎥
⎢
⎥
⎢
⎥
⎢ 0 ⎥
⎢ −DT P Mi ⎥
⎢
⎥
⎥ T ⎢
⎢
⎥ .
⎥F t⎢
⎢ 0 ⎥ i ⎢−DT UMi ⎥
⎢
⎥
⎢
⎥
⎢
⎥
⎢
⎥
⎢N T ⎥
⎥
⎢
0
⎣ 1i ⎦
⎦
⎣
0
0
By Lemmas 2.1 and 2.2, the condition Σi < 0 in 2.39 is equivalent to Σi < 0 in 2.45. From
Σi < 0 and by the similar derivation of Theorem 2.5, the proof can be completed.
If D 0, Theorem 2.11 can be reduced to the following corollary.
Corollary 2.12. Assume that for α > 0, 0 ≤ αi ≤ 1, i 1, 2, . . . , N, there exist constants εi > 0,
i 1, 2, . . . , N, some n × n matrices P, Q, R3 , R4 > 0, some n × n matrices U, Si , V1i , V2i , and V3i ,
i 1, 2, . . . , N, such that the following LMI conditions hold for all i 1, 2, . . . , N:
⎡
11i Σ
12i
Σ
⎢
⎢ ∗ Σ
22i
⎢
⎢
⎢
∗
⎢ ∗
i ⎢
Σ
⎢
⎢ ∗
∗
⎢
⎢
⎢ ∗
∗
⎣
∗
FT P P F N
i1
∗
13i Σ
14i Σ
15i Σ
16i
Σ
23i
Σ
0
25i
Σ
34i
33i Σ
Σ
0
∗
44i
Σ
0
∗
∗
55i
Σ
∗
∗
∗
αi · Si STi Q < 0,
⎤
⎥
0 ⎥
⎥
⎥
⎥
Σ36i ⎥
⎥ < 0,
⎥
0 ⎥
⎥
⎥
0 ⎥
⎦
Σ66i
F
N
i1
αi A0i ,
2.47
Mathematical Problems in Engineering
13
where
11i 2α · P − Q R3 − V1i − V T ,
Σ
1i
14i −Si − V3i V T ,
Σ
1i
23i UA1i ,
Σ
15i P Mi ,
Σ
25i UMi ,
Σ
36i εi · N T ,
Σ
1i
13i P A1i − Si − V2i V T ,
Σ
1i
12i AT UT ,
Σ
0i
16i εi · N T ,
Σ
0i
22i h2 · R4 − U − UT ,
Σ
M
33i −1 − hD · e−2αhM · R3 V2i V T ,
Σ
2i
44i −e−2αhM · R4 V3i V T ,
Σ
3i
34i V3i V T ,
Σ
2i
55i Σ
66i −εi · I.
Σ
2.48
Then the system 2.22a–2.22c with D 0 is globally exponentially stabilizable with convergence
rate α by the switching signal given in 2.37.
If D Mi N0i N1i 0, i 1, 2, . . . , N, Corollary 2.12 can be reduced to the
following corollary.
Corollary 2.13. Assume that for α > 0, 0 ≤ αi ≤ 1, i 1, 2, . . . , N, there exist some n × n matrices
P, Q, R3 , R4 > 0, some n × n matrices U, Si , V1i , V2i , and V3i , i 1, 2, . . . , N, such that the following
LMI conditions hold for all i 1, 2, . . . , N:
⎡
11i Σ
12i
Σ
⎢
⎢
22i
⎢ ∗ Σ
i ⎢
Σ
⎢
⎢ ∗
∗
⎣
∗
∗
FT P P F N
13i Σ
14i
Σ
23i
Σ
33i
Σ
∗
⎤
⎥
⎥
0 ⎥
⎥ < 0,
34i ⎥
⎥
Σ
⎦
44i
Σ
αi · Si STi Q < 0,
2.49
F
N
i1
αi A0i ,
i1
jki , j, k 1, 2, 3, 4, i 1, 2, . . . , N, are defined in Corollary 2.12. Then the system 2.22a–
where Σ
2.22c with D Mi N0i N1i 0 is globally exponentially stabilizable with convergence rate α
by the switching signal given in 2.37.
Remark 2.14. By setting α 0 in Theorems 2.5–2.11 and Corollaries 2.7–2.13, the global
asymptotic stability for system 2.22a–2.22c can be guaranteed.
3. Numerical Examples
Example 3.1. Consider the system 2.22a–2.22c and the following parameters:
N 2,
D
0.1
0
0.1 −0.1
!
,
A01 −4 2
1 0
!
,
A11 1 0
0.5 1
!
,
A02 0 −1
−1 −4
!
,
3.1
14
Mathematical Problems in Engineering
Table 1: Comparison with other previous results.
Allowable time-varying delay bounds retaining global asymptotic stability α 0
of the system 2.22a–2.22c with 3.1 under switching signal 3.4
Results
hD 0
hD 0.2
hD 0.3
Reference 10 without perturbations and D 0 hM 0.9999998 hM 0.9999997 hM 0.9999996
hM ≥ 0
hM ≥ 0
Our results with perturbations
hM ≥ 0
A12 !
0.5 0
0.5 1
,
M1 0.1
0.2
!
,
M2 0.2
!
0.1
,
N01 N02 0.1 0.1 , N11 N12 0.2 0.1 .
3.2
By Corollary 2.7, a feasible solution of LMI 2.29 with 3.1, α 0, hD 0.2, and
α1 α2 0.5 is given by
P
169.0808
6.9691
6.9691
147.4925
R2 !
,
Q
618.4486 − 21.7634
− 21.7634 538.3595
275.0262 25.6702
!
,
R1 120.4512 − 58.0284
− 58.0284
90.4631
!
,
!
25.6702 180.9190
,
ε1 145.7753,
ε2 180.2272.
3.3
Select the switching signal by
σ
⎧
⎨1,
x ∈ Ω1 ,
⎩2,
x ∈ Ω2 ,
3.4
where Ω1 Ω1 , Ω2 Ω2 − Ω1 ,
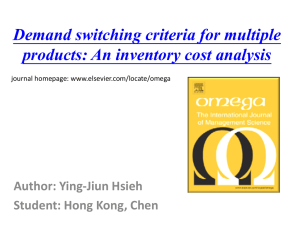
Ω1 x ∈ Rn : −720.2596x12 872.0285x1 x2 566.2359x22 ≤ 0 ,
Ω2 x ∈ Rn : 604.5104x12 − 732.4262x1 x2 − 655.5187x22 ≤ 0 .
3.5
The switching regions Ω1 and Ω2 are sketched in Figure 1. The system 2.22a–2.22c with
hD 0.2 and 3.1 is globally asymptotically stabilizable by the switching signal 3.4. Some
comparisons are made in Table 1. The result of this paper provides a major improvement to
guarantee the global asymptotic stability of system 2.22a–2.22c with 3.1.
Mathematical Problems in Engineering
15
15
Ω2
10
5
x2
Ω1
0
Ω1
−5
−10
Ω2
−15
−15
−10
−5
0
5
10
15
x1
Figure 1: Switching regions.
Table 2: Comparison with other previous results.
Allowable time-varying delay bounds retaining global asymptotic stability α 0
of the system 2.22a–2.22c with 3.6
Results
hD 0
hD 0.1
hD 0.5
hD 0.9
hD 1
Reference 7
hM 0.001573
No results
Reference 6
hM 0.00392
No results
Reference 10
hM 0.0202
hM 0.0179
hM 0.0176
hM 0.0176
hM 0.0176
hM 0.0271
hM 0.0193
hM 0.0181
hM 0.0180
Our results
hM 0.0309
Example 3.2. Consider the system 2.22a–2.22c and the following parameters 7:
N 2,
A11 D Mi N0i N1i 0,
−1 −7
23 6
!
,
A02 −2 10
A01 !
−4 −2
,
A12 −2
2
!
−20 −2
!
4 −5
1 −8
,
3.6
.
By Corollary 2.13, some comparisons with the obtained results for switched system
2.22a–2.22c with 3.6 are made in Table 2. The results of this paper provide a larger
allowable upper bound for time delay to guarantee the global asymptotic stability of system
2.22a–2.22c with 3.6 by the switching signal 2.37.
Example 3.3. Consider the following switched system with input time delay 7:
ẋt A0σ xt Bσ ut − ht,
t ≥ 0,
3.7
16
Mathematical Problems in Engineering
Table 3: Comparison with other previous results.
Results
Reference 7
Reference 10
Our results
Allowable time-varying delay bounds retaining global asymptotic
and exponential stability of the system 3.7 with 3.9
hD 0, α 0
hD 0.1, α 0
hD 0, α 0.1
hD 0, α 0.2
hM 0.008723
No results
hM 0.0189
hM 0.0182
No results
hM 0.03112
hM 0.0294
hM 0.0296
hM 0.0281
where
N 2,
A01 3
2
!
−5 −1
,
A02 −1 20
−2 2
!
,
B1 −1 0
1 −1
!
,
B2 1 1
!
0 −1
.
3.8
The feedback control is given by ut Kσt xt with
K1 5 0
20 1
!
,
K2 −3 −14
2
4
!
.
3.9
For the given feedback control 3.9, system 3.7 can be rewritten as
ẋt A0σ xt A1σ xt − ht,
t ≥ 0,
3.10
where A1σ Bσ Kσ . As shown in Table 3, the results obtained in this paper provide larger
allowable time delay bounds guaranteeing the global stability of system 3.7 with 3.9 by
switching signal 2.37. In 7, 10, the convex combination parameters are chosen by α1 1/3
and α2 2/3. The convex combination parameters of our results are chosen by α1 0.1 and
α2 0.9.
4. Conclusions
In this paper, the switching signal design for global exponential stability of uncertain
switched neutral systems with mixed time delays has been considered. LMI and Razumikhinlike approaches are used to derive delay-dependent and delay-independent stability criteria.
The results obtained in this paper are less conservative than the previous ones for the
numerical examples investigated in this paper.
Acknowledgment
The research reported here was supported by the National Science Council of Taiwan, under
Grant no. NSC 96-2221-E-022-011-MY2.
Mathematical Problems in Engineering
17
References
1 K. Gu, V. L. Kharitonov, and J. Chen, Stability of Time-Delay Systems, Birkhäuser, Boston, Mass, USA,
2003.
2 J. K. Hale and S. M. Verduyn Lunel, Introduction to Functional-Differential Equations, vol. 99 of Applied
Mathematical Sciences, Springer, New York, NY, USA, 1993.
3 V. B. Kolmanovskii and A. Myshkis, Applied Theory of Functional Differential Equations, Kluwer
Academic Publishers, Dordrecht, The Netherlands, 1992.
4 C.-H. Lien and K.-W. Yu, “Non-fragile H∞ control for uncertain neutral systems with time-varying
delays via the LMI optimization approach,” IEEE Transactions on Systems, Man, and Cybernetics, Part
B, vol. 37, no. 2, pp. 493–499, 2007.
5 D. Xie, N. Xu, and X. Chen, “Stabilisability and observer-based switched control design for switched
linear systems,” IET Control Theory & Applications, vol. 2, no. 3, pp. 192–199, 2008.
6 R. Chen and K. Khorasani, “Stability analysis of a class of switched time-delay systems with unstable
subsystems,” in Proceedings of the IEEE International Conference on Control and Automation (ICCA ’07),
pp. 265–270, GuangZhou, China, May-June 2007.
7 S. Kim, S. A. Campbell, and X. Liu, “Stability of a class of linear switching systems with time delay,”
IEEE Transactions on Circuits and Systems I, vol. 53, no. 2, pp. 384–393, 2006.
8 V. Kulkarni, M. Jun, and J. Hespanha, “Piecewise quadratic Lyapunov functions for piecewise affine
time-delay systems,” in Proceedings of the American Control Conference (AAC ’04), vol. 5, pp. 3885–3889,
Boston, Mass, USA, June-July 2004.
9 J. Liu, X. Liu, and W.-C. Xie, “Delay-dependent robust control for uncertain switched systems with
time-delay,” Nonlinear Analysis: Hybrid Systems, vol. 2, no. 1, pp. 81–95, 2008.
10 X.-M. Sun, W. Wang, G.-P. Liu, and J. Zhao, “Stability analysis for linear switched systems with timevarying delay,” IEEE Transactions on Systems, Man, and Cybernetics, Part B, vol. 38, no. 2, pp. 528–533,
2008.
11 Y. G. Sun, L. Wang, and G. Xie, “Stability of switched systems with time-varying delays: delaydependent common Lyapunov functional approach,” in Proceedings of the American Control Conference,
vol. 5, pp. 1544–1549, Minneapolis, Minn, USA, June 2006.
12 X.-M. Sun, J. Zhao, and D. J. Hill, “Stability and L2 -gain analysis for switched delay systems: a delaydependent method,” Automatica, vol. 42, no. 10, pp. 1769–1774, 2006.
13 C.-H. Wang, L. I.-X. Zhang, H.-J. Gao, and L.-G. Wu, “Delay-dependent stability and stabilization of a
class of linear switched time-varying delay systems,” in Proceedings of the 4th International Conference
on Machine Learning and Cybernetics (ICMLC ’05), pp. 18–21, GuangZhou, China, 2005.
14 C.-H. Lien, K.-W. Yu, Y.-F. Lin, Y.-J. Chung, and L.-Y. Chung, “Exponential convergence rate
estimation for uncertain delayed neural networks of neutral type,” Chaos, Solitons and Fractals, vol.
40, no. 5, pp. 2491–2499, 2009.
15 S. Boyd, L. El Ghaoui, E. Feron, and V. Balakrishnan, Linear Matrix Inequalities in System and Control
Theory, vol. 15 of SIAM Studies in Applied Mathematics, SIAM, Philadelphia, Pa, USA, 1994.


![Network Technologies [Opens in New Window]](http://s3.studylib.net/store/data/008490270_1-05a3da0fef2a198f06a57f4aa6e2cfe7-300x300.png)