Document 10907637
advertisement

Hindawi Publishing Corporation
Journal of Applied Mathematics
Volume 2012, Article ID 718618, 24 pages
doi:10.1155/2012/718618
Research Article
Robust Control for Uncertain Switched
Systems with Interval Nondifferentiable
Time-Varying Delays
T. La-inchua1 and P. Niamsup1, 2
1
2
Department of Mathematics, Chiang Mai University, Chiang Mai 50200, Thailand
Center of Excellence in Mathematics, CHE, Si Ayutthaya Road, Bangkok 10400, Thailand
Correspondence should be addressed to P. Niamsup, piyapong.n@cmu.ac.th
Received 22 December 2011; Accepted 27 May 2012
Academic Editor: Vu Phat
Copyright q 2012 T. La-inchua and P. Niamsup. This is an open access article distributed under
the Creative Commons Attribution License, which permits unrestricted use, distribution, and
reproduction in any medium, provided the original work is properly cited.
This paper addresses the conditions for robust stabilization of a class of uncertain switched systems
with delay. The system to be considered is autonomous and the state delay is time-varying. Using
Lyapunov functional approach, restriction on the derivative of time-delay function is not required
to design switching rule for the robust stabilization of switched systems with time-varying delays.
The delay-dependent stability conditions are presented in terms of the solution of LMIs which
can be solved by various available algorithms. A numerical example is given to illustrate the
effectiveness of theoretical results.
1. Introduction
The switched system is a type of hybrid systems that consist of a family of a differential
or difference equations and a switching rule to indicate which subsystem will be activated
at a specific interval of time. For applications, switched systems can be used to describe
several physical or chemical processes which are concerned by more than one dynamics:
some systems work at some interval time then stop and other systems take over such as
the automatic system in airplane, car energy system, traffic system, and machine industrial
system, see 1, 2. Thus, a switching strategy must be designed in the study of stability of
switched systems, also see 3–5.
The delay system has been considered in many research, especially the real processes
in our world often involve time-delay; that is, the present state depends on the past states
which brings more difficulty to investigate the stability of the system, especially time varying
delay system, see 6–10. In general, the following assumption on the derivative of the delay
2
Journal of Applied Mathematics
is made, namely ḣt < 1, see 11, 12 and references cited therein. This assumption may
leads to conservativeness; for example, it might not be used when the delay is a fast or a
nondifferential time varying function.
Moreover, in study of real world applications, the systems are in general influenced
by disturbances which might cause inaccuracy of the data. The system can become unstable
or less capable because of disturbance. Consequently, the study of robust stability of
switched systems with time varying delay becomes important and has been studied by many
researchers, see 7, 12–17.
In this paper, we study the problem of robust stability for a class of switched systems
with time-varying delay. Compared with existing results in the literature, the novelty of
our results is twofold. Firstly, the state delay is time-varying in which the restriction on the
derivative of the time-delay function is not required to design switching rule in term of a
dwell time for the robust stability of the system. Secondly, the obtained conditions for the
robust stability are delay-dependent and formulated in terms of the solution of standard LMIs
which can be solved by various available algorithms 18. The paper is organized as follows.
Section 2 presents notations, definitions, and auxiliary propositions required for the proof
of the main results. Switching design for the robust stability of the system with illustrative
examples is presented in Sections 3 and 4, respectively. The paper ends with a conclusion
followed by cited references.
2. Problem Formulation and Preliminaries
Throughout this paper, the following notations will be used:
Rn —the n dimensional Euclidean space;
Rn×n —the set of all n × n real matrices;
N—the set of all positive integers;
x—the Euclidean norm of vector x ∈ Rn ;
diag{·}—the block diagonal matrix;
I—the identity matrix;
AT —the transpose of matrix A;
A−1 —the inverse of matrix A;
A B
T
∗ C —∗ the symmetric form of matrix, namely, ∗ B ;
A sup{Ax : x ∈ Rn , x 1} for any A ∈ Rn×n ;
Ch2 —space of continuous vector-valued function defined on −h2 , 0;
xt θ xt θ, −h2 ≤ θ ≤ 0, where xt ∈ Ch2 ;
xt ch2 sup−h2 ≤θ≤0 xt θ;
λmax A max{Reλ : λ is eigenvalue of A};
λmin A min{Reλ : λ is eigenvalue of A};
M {1, 2, . . . , k}.
Journal of Applied Mathematics
3
Consider the following uncertain switched system with time varying delay:
ẋt Aσt ΔAσt t xt Dσt ΔDσt t x t − hσt t
Bσt ΔBσt t uσt t, t > 0,
xt φt,
2.1
t ∈ −h2 , 0,
where xt x1 t, x2 t, . . . , xn tT ∈ Rn is the state vector. Ai , Di , Bi , i ∈ M are known
constant matrices, ΔAi , ΔDi , ΔBi are uncertainty matrices which are of the form
ΔAi E1,i F1,i tH1,i ,
ΔDi E2,i F2,i tH2,i ,
ΔBi E3,i F3,i tH3,i ,
T
Fj,i
tFj,i t ≤ I,
j 1, 2, 3,
2.2
where F1,i t, F2,i t, F3,i t are unknown matrices, I is the identity matrix of appropriate
dimension. hi t is the delay function for an ith subsystem which satisfies the following
condition:
0 ≤ h1 ≤ h1,i ≤ hi t ≤ h2,i ≤ h2 .
2.3
Let φt be an initial condition. σt : R ∪ {0} → M, t ∈ tk , tk1 , k ∈ N, σt is called the
switching signal; we have the switching sequence {xt0 ; i0 , t0 , . . . | ik ∈ M, k 0, 1, 2, . . .},
which means that when t ∈ tk , tk1 , the ik th subsystem is activated.
Definition 2.1. T ∗ inf{tl − tl−1 } is called the dwell time of switched system.
Definition 2.2. The system 2.1 is said to be stabilizabled if there exists a feedback
controller ut ∈ Rm such that the closed loop switched systems without uncertainties is
asymptotically stable.
Definition 2.3. The system 2.1 is said to be robustly stabilizable if there exists a feedback
controller ut ∈ Rm such that the closed loop uncertain switched systems are robustly stable.
The following lemmas will be used throughout this paper.
Lemma 2.4 Schur complement lemma. Given constant symmetric matrices Q, S and R ∈ Rn×n ,
where R > 0, Q QT , and R RT , one has
Q
ST
S
< 0 ⇐⇒ Q SR−1 ST < 0.
−R
2.4
Lemma 2.5 see 13. Given ε > 0 and matrices D, E, and F with F T F ≤ I, one has
DEF ET F T DT ≤ εDDT ε−1 ET E.
2.5
4
Journal of Applied Mathematics
Lemma 2.6 see 13. Given a positive definite matrix P ∈ Rn×n , any symmetric matrix Q ∈ Rn×n
and x ∈ Rn , then
λmin P −1 Q xT P x ≤ xT Qx ≤ λmax P −1 Q xT P x.
2.6
Lemma 2.7 see 13. For any positive semidefinite matrix M ∈ Rn×n , a scalar γ > 0, and a vector
function ω : 0, γ → Rn×n such that the integrals concerned are well-defined, one has
γ
γ
T γ
ωsds M
ωsds ≤ γ
ωT sMωsds.
0
0
2.7
0
Lemma 2.8 Cauchy inequality. For any symmetric positive definite matrix N ∈ Mm×m and
x, y ∈ Rn , one has
±2xT y ≤ xT Nx yT N −1 y.
2.8
For simplicity of later presentation, one gives the following notations.
Σ11,i Pi ATi Ai Pi − Bi BiT 2 h21 h22 Qi − Ri ;
Σ13,i 0.5Ri ;
Σ25,i Di Pi ;
Σ14,i 0.5Ri ;
Σ15,i Di Pi ;
Σ22,i h21,i h22,i Ri δi2 Qi − 2Pi ;
Σ33,i −Qi − 0.5Ri − 0.5Ui ;
Σ45,i 0.5Ui ;
Σ55,i −Ui ;
λ3 max{λmax Pi };
i∈M
λ∗ min{λ4 , λ5 };
Σ12,i Pi ATi − 0.5Bi BiT ;
Σ35,i 0.5Ui ;
λ1 max λmax Pi−1 ;
i∈M
λ4 min{λmin −Ω1,i };
1
ha,i h1,i h2,i ;
2
i∈Ik
δi h2,i −h1,i ;
Σ44,i −Qi − 0.5Ri − 0.5Ui ;
λ2 min λmin Pi−1 ;
i∈M
λ5 min{λmin −Ω2,i };
i∈M
h∗ min{h2,i − ha,i };
i∈M
δ h2 − h1 .
2.9
3. Main Results
3.1. Asymptotical Stabilization for Nominal Switched Systems with Interval
Time-Varying Delay
The nominal switched systems are given by
ẋt Aσt xt Dσt x t − hσt t Bσt uσt t,
xt φt,
t ∈ −h2 , 0.
t>0
3.1
We now state the main result on sufficient condition for stabilization of the switched systems
3.1.
Journal of Applied Mathematics
5
Theorem 3.1. Given α ∈ 0, 1. If there exists symmetric positive definite matrices Pi , Qi , Ri , Ui
such that the following conditions hold:
T Ω1,i Ωi − 000 −II Ui 000 −II < 0,
T Ω2,i Ωi − 00I0 −I Ui 00I0 −I < 0,
⎡
⎤
Σ11,i Σ12,i Σ13,i Σ14,i Σ15,i
⎢ ∗ Σ
0
0 Σ25,i ⎥
⎢
⎥
22,i
⎢
⎥
∗ Σ33,i 0 Σ35,i ⎥,
Ωi ⎢ ∗
⎢
⎥
⎣ ∗
∗
∗ Σ44,i Σ45,i ⎦
∗
∗
∗
∗ Σ55,i
3.2
and if
λ1
1
T ≥ ln
,
ρ
αλ2
∗
3.3
where ρ min{h∗ λ∗ /δλ3 , 1/2h2 , 1/2}, T ∗ is the dwell time, then for any switching rule satisfying
3.3 the switched system 3.1 is stabilizable under the feedback controller
1
ui t − BiT Pi−1 xt,
2
t ≥ 0.
3.4
Proof. Let Yi Pi−1 , yt Yi xt. Using the feedback controller 3.4, we choose a LyapunovKrasovskii functional candidates as
Vi xt V1,i xt · · · V8,i xt ,
where
V1,i xt xT tYi xt,
t
xT sYi Qi Yi xsds,
V2,i xt t−h1,i
V3,i xt t
xT sYi Qi Yi xsds,
t−h2,i
V4,i xt h1,i
0
−h1,i
t
ts
ẋT θYi Ri Yi ẋθdθ ds,
3.5
6
Journal of Applied Mathematics
V5,i xt h2,i
V6,i xt δi
0
t
−h2,i
ts
−h1,i t
V7,i xt h1,i
V8,i xt h2,i
ẋT θYi Ui Yi ẋθdθ ds,
−h2,i
ts
0
t
−h1,i
0
ẋT θYi Ri Yi ẋθdθ ds,
ts
t
−h2,i
xT θYi Qi Yi xθdθ ds,
xT θYi Qi Yi xθdθ ds.
ts
3.6
It is easy to see that
3.7
Vi xt ≥ c1 xt2 ,
for some c1 > 0. Taking the derivative of Vi xt with respect to t along any trajectory of
solution of 3.1 yields
V̇1,i xt 2xT tYi ẋt,
yT t Pi ATi Ai Pi yt − yT tBiT Bi yt 2yT tDi Pi yt − hi t,
3.8
V̇2,i xt yT tQi yt − yT t − h1,i Qi yt − h1,i ,
3.9
V̇3,i xt yT tQi yt − yT t − h2,i Qi yt − h2,i ,
h1,i t
h1,i t
ẏT sRi ẏsds −
ẏT sRi ẏsds,
V̇4,i xt h21,i ẏT tRi ẏt −
2 t−h1,i
2 t−h1,i
V̇5,i xt h22,i ẏT tRi ẏt −
h2,i
2
V̇6,i xt δi2 ẏT tUi ẏt −
δi
2
t
ẏT sRi ẏsds −
t−h2,i
t−h1,i
ẏT sUi ẏsds −
t−h2,i
V̇7,i xt h21,i yT tQi yt − h1,i
V̇8,i xt h22,i yT tQi yt − h2,i
t
h2,i
2
δi
2
t
ẏT sRi ẏsds,
3.10
3.11
3.12
t−h2,i
t−h1,i
ẏT sRi ẏsds,
3.13
t−h2,i
xT sYi Qi Yi xsds,
3.14
xT sYi Qi Yi xsds.
3.15
t−h1,i
t
t−h2,i
Journal of Applied Mathematics
7
Then by applying Lemma 2.7 and Leibniz-Newton formular, we have
h1,i
−
2
t
ẏT sRi ẏsds
t−h1,i
Ri
Ri
yt yT tRi yt − h1,i yT t − h1,i −
yt − h1,i ,
≤ yT t −
2
2
h2,i t
ẏT sRi ẏsds
−
2 t−h2,i
Ri
Ri
yt yT tRi yt − h2,i yT t − h2,i −
yt − h2,i .
≤ yT t −
2
2
3.16
Note that
δi
−
2
t−h1,i
t−h2,i
δi
ẏ sUi ẏsds −
2
T
t−hi t
t−h2,i
δi
ẏ sUi ẏsds −
2
h2,i − hi t
−
2
×
t−hi t
t−h2,i
−
T
t−ht
t−h1,i
t−hi t
ẏT sUi ẏsds −
t−h2,i
hi t − h1,i
ẏ sUi ẏsds −
2
T
h2,i − hi t
2
t−h1,i
ẏT sUi ẏsds
ht − h1,i
2
t−h1,i
t−hi t
ẏT sUi ẏsds
ẏT sUi ẏsds.
t−ht
3.17
Using Lemma 2.7 yields
−
h2,i − hi t
2
t−hi t
ẏT sUi ẏsds
t−h2,i
T
Ui yt − hi t − yt − h2,i ,
≤ yt − hi t − yt − h2,i −
2
hi t − h1,i t−h1,i T
ẏ sUi ẏsds
−
2
t−hi t
T
Ui ≤ yt − h1,i − yt − hi t
yt − h1,i − yt − hi t .
−
2
3.18
8
Journal of Applied Mathematics
Let β h2,i − hi t/h2,i − h1,i ≤ 1. Then
−
h2,i − hi t
2
t−h1,i
t−hi t
ẏT sUi ẏsds −β
t−h1,i
t−hi t
t−h1,i
h2,i − h1,i ẏT s
Ui
ẏsds
2
Ui
ẏsds
2
t−hi t
T Ui
≤ −β yt − h1,i − yt − hi t
2
× yt − h1,i − yt − hi t .
≤ −β
hi t − h1,i
−
2
t−hi t
ẏ sUi ẏsds − 1 − β
T
t−h2,i
hi t − h1,i ẏT s
t−hi t
t−h2,i
t−hi t
Ui
ẏsds
h2,i − h1,i ẏ s
2
3.19
T
Ui
ẏsds
2
t−h2,i
T Ui
≤ − 1 − β yt − hi t − yt − h2,i 2
× yt − hi t − yt − h2,i .
≤− 1−β
h2,i − hi tẏT s
Therefore from 3.18-3.19, we have
−
δi
2
t−h1,i
t−h2,i
T
Ui ẏT sUi ẏsds ≤ yt − hi t − yt − h2,i −
yt − hi t − yt − h2,i 2
T
Ui yt − hi t − yt − h2,i yt − hi t − yt − h2,i −
2
T Ui − β yt − h1,i − yt − hi t
yt − h1,i − yt − hi t
2
T Ui
− 1 − β yt − hi t − yt − h2,i 2
× yt − hi t − yt − h2,i .
3.20
Furthermore, from the following zero equation
−Pi ẏt Ai Pi yt Di Pi yt − hi t − 0.5Bi BiT yt 0,
3.21
−2ẏT Pi ẏt 2ẏT Ai Pi yt 2ẏT Di Pi yt − hi t − 2ẏT 0.5Bi BiT yt 0.
3.22
we obtain
Journal of Applied Mathematics
9
Hence, from 3.5,3.8–3.16,3.20, and 3.22, we can get
T Ui V̇i xt ≤ ξ tΩi ξt − β yt − h1,i − yt − ht
yt − h1,i − yt − hi t
2
T Ui − 1 − β yt − hi t − yt − h2,i yt − hi t − yt − h2,i 2
h1,i t
h2,i t
−
ẏT sRi ẏsds −
ẏT sRi ẏsds
2 t−h1,i
2 t−h2,i
T
−
δi
2
t−h1,i
ẏT sRi ẏsds − h1,i
− h2,i
xT sYi Qi Yi xsds
t−h1,i
t−h2,i
t
t
xT sYi Qi Yi xsds
t−h2,i
h1,i
ξ t 1 − β Ω1,i βΩ2,i ξt −
2
T
h2,i
−
2
− h1,i
t
δi
ẏ sRi ẏsds −
2
t−h2,i
t
T
t
t−h1,i
t−h1,i
ẏT sRi ẏsds,
t−h2,i
x sYi Qi Yi xsds − h2,i
T
ẏT sRi ẏsds
t−h1,i
t
xT sYi Qi Yi xsds,
t−h2,i
3.23
where ξT t yT t ẏT t yT t−h1,i yT t−h2,i yT t−hi t .
Suppose τ is the time when the system switches from state j to state i, that is Iτ i and Iτ − j, where τ and τ − are the right and the left limit of the time τ, respectively.
According to Lemma 2.6, we obtain
V1,i xτ xT τYi xτ
≤
λ1
λ2 xT τxτ
λ2
≤
λ1 T
x τPj xτ
λ2
λ1
V1,j xτ − .
λ2
3.24
We can apply this argument to integral terms in the Lypunov-Krasovskii function, so we get
Vi xτ ≤
λ1
Vj xτ − .
λ2
3.25
Now let ν be the time when the system switches from state k to state j, that is, Iν j and
Iν− k, where ν and ν− are a right and a left limit of the time ν, respectively. In order
10
Journal of Applied Mathematics
to show that the switched system is stable, we need to compare Vi xτ with Vj xν and
estimate the upper bound for the term ξT t1 − βΩ1,i βΩ2,i ξt in the inequality 3.23.
Hence we consider two following possible cases.
Case 1 0 ≤ h1 ≤ h1,i ≤ ht ≤ ha,i ≤ h2,i ≤ h2 . Since 0 ≤ β ≤ 1, Ω1,i < 0 and Ω2,i < 0, we have
ξT t 1 − β Ω1,i βΩ2,i ξt
≤ ξT t βΩ2,i ξt
2 2 2
h2,i − ha,i
λ5 yt ẏt yt − h1,i ≤−
δi
2 2 yt − h2,i yt − hi t
2 h2,i − ha,i
≤−
λ5 yt
δi
h2,i − ha,i λ5 λ3 yt2
−
δi
λ3
h2,i − ha,i λ5 T
x tPi−1 Pi Pi−1 xt
≤−
δ
λ3
h2,i − ha,i λ5
≤−
V1,i
δ
λ3
h2,i − ha,i λ∗
≤−
V1,i
δ
λ3
∗ ∗
h λ
≤−
V1,i .
δ λ3
3.26
Case 2 0 ≤ h1 ≤ h1,i ≤ ha,i ≤ ht ≤ h2,i ≤ h2 . Since 0 ≤ β ≤ 1, Ω1,i < 0 and Ω2,i < 0, we get
ξT t 1 − β Ω1,i βΩ2,i ξt
≤ ξT t 1 − β Ω1,i ξt
2 2 2
ha,i − h1,i
λ4 yt ẏt yt − h1,i ≤−
δi
2 2 yt − h2,i yt − hi t
2 ha,i − h1,i
≤−
λ4 yt
δi
Journal of Applied Mathematics
ha,i − h1,i λ4 λ3 yt2
−
δi
λ3
ha,i − h1,i λ4 T
x tPi−1 Pi Pi−1 xt
≤−
δ
λ3
ha,i − h1,i λ4
≤−
V1,i .
δ
λ3
11
3.27
Note that h2,i − ha,i ha,i − h1,i , so we obtain
h2,i − ha,i λ∗
ξ t 1 − β Ω1,i βΩ2,i ξt ≤ −
V1,i
δ
λ3
∗ ∗
h λ
≤−
V1,i .
δ λ3
T
3.28
Moreover, from the definition of V2,i , . . ., V8,i , we can get
h1,i
−
2
t
1
ẏ sRi ẏsds ≤ −
2
t−h1,i
T
0
t
−h1,i
ẋT θYi Ri Yi ẋθdθ ds
ts
1
V4,i ,
2h2,i
t
h2,i t
1 0
T
ẏ sRi ẏsds ≤ −
ẋT θYi Ri Yi ẋθdθ ds
−
2 t−h2,i
2 −h2,i ts
≤−
3.29
1
≤−
V5,i ,
2h1,i
1 −h1,i t T
δi t−h1,i T
ẏ sUi ẏsds ≤ −
ẋ θYi Ui Yi ẋθdθ ds
−
2 t−h2,i
2 −h2,i ts
≤−
1
V6,i .
2δi
Since
−h1,i
t
t−h1,i
xT sYi Qi Yi xsds ≤ −
0
−h1,i
t
ts
1
≤−
V7,i ,
h1,i
xT θYi Qi Yi xθdθ ds
3.30
12
Journal of Applied Mathematics
we can get
− h1,i
t
xT sYi Qi Yi xsds − h1,i
t−h1,i
t
xT sYi Qi Yi xsds
t−h1,i
1
≤−
V7,i − h1,i
h1,i
t
3.31
x sYi Qi Yi xsds.
T
t−h1,i
So we obtain
−h1,i
t
xT sYi Qi Yi xsds ≤ −
1
1
V7,i − V2,i .
2h1,i
2
3.32
xT sYi Qi Yi xsds ≤ −
1
1
V3,i − V8,i .
2h2,i
2
3.33
t−h1,i
Similar to 3.32, we have
−h2,i
t
t−h2,i
According to 3.23, 3.28–3.33, we have
1
1 1
h∗ λ∗ 1
Vi xt ,
,
,
,
δλ3 2h1,i 2h2,i 2δi 2
∗ ∗
hλ
1 1
≤ − min
,
,
Vi xt δλ3 2h2 2
V̇i xt ≤ − min
3.34
−ρVi xt .
As a result, we get
V̇j xt ≤ −ρVj xt ,
3.35
1
dVj xt ≤ −ρdt.
Vj xt 3.36
which yields
Integrating 3.36 on ν, τ, we obtain
Vj xτ − ≤ Vj xν e−ρτ−ν .
3.37
From 3.25 and 3.37, we have
Vi xτ ≤
λ1
Vj xν e−ρτ−ν .
λ2
3.38
Journal of Applied Mathematics
13
Since
τ − ν ≥ T0 ≥
λ1
1
ln
,
ρ
αλ2
3.39
we obtain from 3.38 that
Vi xτ ≤ αVj xν .
3.40
Let Nt be the number of time the system is switched on 0, t. Since the switched system
3.1 undergoes infinite times of switches on 0, ∞, we obtain limt → ∞ Nt ∞. Assume that
It i and I0 i0 . Then, according to 3.7 and 3.40, we have
c1 xt2 ≤ Vi xt ≤ αNt Vi0 x0 .
3.41
Since 0 < α < 1 and limt → ∞ Nt ∞, it follows from 3.41 that xt → 0 as t → ∞. We
conclude that the zero solution of 3.1 is stabilizable.
3.2. Robust Stabilization for Switched Systems with Interval
Time-Varying Delay
Theorem 3.2. Given α ∈(0, 1). If there exists symmetric positive definite matrices Pi , Qi , Ri , Ui such
that the following conditions hold:
T Ω1,i Ωi − 000 −II Ui 000 −II < 0,
Ω3,i
T Ω2,i Ωi − 00I0 −I Ui 00I0 −I < 0,
⎡
⎤
T
T
Bi H3,i
Bi H3,i
T
T
⎢Ω311,i Pi H1,i Pi H1,i
⎥
⎢
2
2 ⎥
⎢ ∗
0
0
0 ⎥
−1 I
⎢
⎥
⎢
⎥
0
0 ⎥ < 0,
∗
∗
−2 I
⎢
⎢
⎥
−5 I
⎢
⎥
⎢ ∗
⎥
∗
∗
0
⎢
⎥
2
⎣
−6 I ⎦
∗
∗
∗
∗
2
⎡
⎤
T
T
Ω411,i Pi H2,i
Pi H2,i
⎣
Ω4,i ∗
−3 I
0 ⎦ < 0,
∗
∗
−4 I
⎡
⎤
Λ11,i Λ12,i Λ13,i Λ14,i Λ15,i
⎢ ∗ Λ
0
0 Λ25,i ⎥
⎢
⎥
22,i
⎢
⎥
∗ Λ33,i 0 Λ35,i ⎥,
Ωi ⎢ ∗
⎢
⎥
⎣ ∗
∗
∗ Λ44,i Λ45,i ⎦
∗
∗
∗
∗ Λ55,i
3.42
3.43
3.44
3.45
3.46
14
Journal of Applied Mathematics
where
5
Λ11,i Pi ATi Ai Pi − 0.5Bi BiT 2 h21,i h22,i Qi − 0.5Ri 1 E1T E1 3 E2T E2 E3T E3 ;
2
Λ12,i Pi ATi − 0.5Bi BiT ;
Λ13,i 0.5Ri ;
Λ14,i 0.5Ri ;
Λ15,i Di Pi ;
6
Λ22,i h21,i h22,i δi2 Qi − 2Ri 2 E1T E1 4 E2T E2 E3T E3 ;
2
Λ25,i Di Pi ;
Λ33,i −Qi − 0.5Ri − 0.5Ui ;
Λ35,i 0.5Ui ;
Λ44,i −Qi − 0.5Ri − 0.5Ui ;
Λ45,i 0.5Ui ;
Λ55,i −0.5Ui ;
Ω311,i −0.5Bi BiT − 0.5Ri ;
Ω411,i −0.5Ui .
3.47
Then for any switching rule satisfying 3.3 the switched system 2.1 is robustly stabilizable under
the feedback controller given by 3.4.
Proof. Construct Lyapunov-Krasovskii functional as in 3.5, we can proof this theorem by
using a similar argument as in the proof of Theorem 3.1. By replacing Ai , Di , Bi in 3.8 with
Ai E1,i F1,i tH1,i , Di E2,i F2,i tH2,i , Bi E3,i F3,i tH3,i , respectively, we obtain
V̇i xt ≤ yT t Pi Ai E1,i F1,i tH1,i T Ai E1,i F1,i tH1,i Pi yt
2yT tDi E2,i F2,i tH2,i Pi yt − hi t − yT tBiT Bi yt
− yT tE3,i F3,i tH3,i BiT yt yT t 2 h21,i h22,i Qi yt
− yT t − h1 Qi yt − h1 − yT t − h2 Qi yt − h2 Ri
T
2
2
2
T
ẏ t h1,i h1,i Ri δi Ui ẏt y t −
yt
2
Ri
T
T
yt − h1,i y tRi yt − h1,i y t − h1,i −
2
Journal of Applied Mathematics
Ri
Ri
yT t −
yt yT tRi yt − h2,i yT t − h2,i −
yt − h2,i 2
2
T
Ui yt − hi t − yt − h2,i −
yt − hi t − yt − h2,i 2
T
Ui yt − hi t − yt − h2,i −
yt − hi t − yt − h2,i 2
T
Ui yt − h1,i − yt − hi t
−
− β yt − h1,i − yt − hi t
2
T
Ui − 1 − β yt − hi t − yt − h2,i yt − hi t − yt − h2,i −
2
15
− 2ẏT Pi ẏt 2ẏT Ai E1,i F1,i tH1,i Pi yt 2ẏT Di E2,i F2,i tH2,i Pi
× yt − hi t − 2ẏT 0.5Bi BiT yt − ẏT E3,i F3,i tH3,i BiT yt
h1,i t
h2,i t
T
−
ẏ sRi ẏsds −
ẏT sRi ẏsds
2 t−h1,i
2 t−h2,i
−
δi
2
t−h1,i
− h2,i
ẏT sRi ẏsds − h1,i
xT sYi Qi Yi xsds
t−h1,i
t−h2,i
t
t
xT sYi Qi Yi xsds.
t−h2,i
3.48
And using Lemma 2.5, we can get the following upper bounds for the uncertain terms in
3.48:
T
−1 T
T
2yT tE1,i F1,i tH1,i Pi yt ≤ 1,i yT tE1,i
E1,i yt 1,i
y tPi H1,i
H1,i Pi yt,
T
−1 T
T
2ẏT tE1,i F1,i tH1,i Pi yt ≤ 2,i ẏT tE1,i
E1,i ẏt 2,i
y tPi H1,i
H1,i Pi yt,
T
2yT tE2,i F2,i tH2,i Pi yt − hi t ≤ 3,i yT tE2,i
E2,i yt
−1 T
T
3,i
y t − hi tPi H2,i
H2,i Pi yt − hi t,
T
E2,i ẏt
2ẏT tE2,i F2,i tH2,i Pi yt − hi t ≤ 4,i ẏT tE2,i
−1 T
T
4,i
y t − hi tPi H2,i
H2,i Pi yt − hi t,
−yT tE3,i F3,i tH3,i BiT yt ≤
−1
5,i
5,i T
T
T
y tE3,i
yT tBi H3,i
E3,i yt H3,i Bi yt,
2
2
−ẏT tE3,i F3,i tH3,i BiT yt ≤
−1
6,i
6,i T
T
T
ẏ tE3,i
yT tBi H3,i
E3,i ẏt H3,i Bi yt.
2
2
3.49
16
Journal of Applied Mathematics
According to 3.48-3.49, it follows that
V̇i xt ≤ ξT t 1 − β Ω1,i βΩ2,i ξt yT tΨ3,i yt yT t − hi tΨ4,i yt − hi t
h1,i t
h2,i t
−
ẏT sRi ẏsds −
ẏT sRi ẏsds
2 t−h1,i
2 t−h2,i
−
δi
2
t−h1,i
ẏT sRi ẏsds, −h1,i
− h2,i
3.50
xT sYi Qi Yi xsds
t−h1,i
t−h2,i
t
t
xT sYi Qi Yi xsds,
t−h2,i
where
−1
T
−1
T
Ψ3,i Ω311,i ε1,i
Pi H1,i
H1,i Pi 2,i
Pi H1,i
H1,i Pi Ψ4,i Ω311,i −1
T
3,i
Pi H2,i
H2,i Pi
−1
5,i
2
T
Bi H3,i
H3,i BiT −1
6,i
2
T
Bi H3,i
H3,i BiT ,
3.51
−1
T
4,i
Pi H2,i
H2,i Pi .
Applying Lemma 2.4, the LMIs Ψ3,i < 0 and Ψ4,i < 0 are equivalent to Ω3,i < 0 and Ω4,i < 0,
respectively. Similarly to the previous theorem we can conclude that the switched system
2.1 is robustly stabilizable.
Remark 3.3. Our proposed method can remove the conservative restrictions on the derivatives
of the time-varying delays, meanwhile traditional design methods require the condition
ḣt ≤ hD see 14, 19, 20. So our method can deal with fast time-varying delays. Moreover,
the improved method need not to introduce any free-weighting matrix variables which turn
out to be less conservative than results in 14, 20, 21.
4. Numerical Examples
In this section, we provide some examples to illustrate the effectiveness of our results in
Theorems 3.1 and 3.2.
Example 4.1. Consider the nominal switched systems with interval time-varying delay
ẋt Ai xt Di xt − hi t Bi ui t,
i 1, 2,
4.1
0
,
1
0
B2 .
1
4.2
with
−2 0
,
0 0.5
−3 1
,
A2 0 0.1
A1 −0.2 0.1
,
0.1 −0.1
−0.1 0.1
D2 ,
0.1 −0.1
D1 B1 Journal of Applied Mathematics
17
Table 1: Maximum allowable upper bounds h2 of the time-varying delay for different values of the lower
bounds h1 in example 1 of 8.
h2
Result
hd
hd
hd
hd
h1
0.4
≥ 1 or unknown
≥ 1 or unknown
≥ 1 or unknown
0
0
0.3
0.6
8
1.2644
0.9339
—
—
4
—
—
0.9514
1.04
Our results
No restriction on ḣt
1.2843
1.2843
1.3120
1.3913
And we choose α 0.9, h1 t 0.1 | sin t|, h2 t 0.1 | cos t|, so we get h1 0.1, h2 1.1.
Then, by using the LMI control toolbox in Matlab, solutions of LMIs 3.2 are given by
0.8273 −0.0052
0.2445 0.0040
P1 ,
Q1 ,
−0.0052 0.8167
0.0040 0.0665
0.2249 −0.0084
3.4735 1.2444
U1 ,
P2 ,
−0.0084 0.3873
1.2444 4.2337
0.4429 0.9777
0.5684 0.4259
R2 ,
U2 ,
0.9777 2.9654
0.4259 1.8023
0.1238
R1 0.0030
0.7132
Q2 0.1563
0.0030
,
0.5581
0.1563
,
0.1691
4.3
with stabilizing controllers
u1 t −0.0039 −0.6122 xt,
u2 t 0.0473 −0.1320 xt.
4.4
By computation, we obtain λ∗ 0.0461, λ1 1.2276, λ2 0.1940, λ3 5.1547, h∗ 0.5. Thus,
ρ 0.0054 and from 3.3 we obtain
T0 ≥ 361.1694.
4.5
Hence, from Theorem 3.1, the switched systems 4.1 with arbitrary switching law subject to
4.5 are stabilizable under the feedback controllers
which are shown in 4.4.
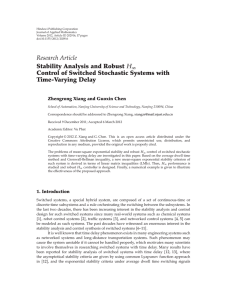
By choosing initial condition as φt sint
sint , t ∈ −1.1, 0, the trajectories of solutions
of the switched system and the trajectories of solutions of subsystems 1 and 2 for this example
are shown in Figures 1, 2, 3, and 4.
In Tables 1 and 2 we give comparison of maximum allowable value of h2 of asymptotic
stability of nominal switched systems obtained in 14, 22 and Theorem 3.1. As we can see
that for some of h1 , the maximum allowable bounds for h2 obtained from Theorem 3.1 are
greater than that obtained in 14, 22. More important, the differentiability of the time delay
ht is not required in our theorem.
Example 4.2. Consider the following uncertain switched systems with interval time-varying
delay
ẋt Ai ΔAi xt Di ΔDi xt − hi t Bi ΔBi ui t,
i 1, 2,
4.6
18
Journal of Applied Mathematics
×104
5
4
x
3
2
1
0
−1
0
5
10
15
20
25
t
x1
x2
Figure 1: The trajectory of solution of system i 1.
3
2.5
2
x
1.5
1
0.5
0
−0.5
−1
5
0
10
15
20
25
t
x1
x2
Figure 2: The trajectory of solution of system i 2.
Table 2: Maximum allowable upper bounds h2 of the time-varying delay for different values of the lower
bounds h1 in example 2 of 4.
h2
Result
hd ≥ 1 or unknown
hd ≥ 1 or unknown
h1
0
0.4
4
0.687
0.856
Our results
No restriction on ḣt
0.9871
1.0227
Journal of Applied Mathematics
19
1
0.8
0.6
0.4
x
0.2
0
−0.2
−0.4
−0.6
−0.8
−1
0
5
10
15
20
25
t
x1
x2
Figure 3: The trajectory of solution of system i 1 under the feedback controller 4.4.
1
0.8
0.6
0.4
x
0.2
0
−0.2
−0.4
−0.6
−0.8
−1
0
10
20
30
40
50
60
70
80
90
100
t
x1
x2
Figure 4: The trajectory of solution of system i 2 under the feedback controller 4.4.
20
Journal of Applied Mathematics
with
−2 1
,
0 0.1
−3 0
A2 ,
0 0.1
0.02 0.01
,
−0.01 0.01
A1 E1,i E2,i E3,i
0.1 0.1
0
,
B1 ,
0.1 −0.1
0.1
−0.1 0.1
0
D2 ,
B2 ,
0.1 −0.1
0.1
0.02 0
0.01
H1,i H2,i ,
H3,i ,
0 0.01
0
D1 4.7
i 1, 2.
4.8
As an illustration, we choose α 0.9, j,i 1 for j 1, 2, . . . 6, i 1, 2,
ht 0.1|sin t|,
h2 t 0.1|cos t|,
sin t 0
F1,1 t F1,2 t F2,1 t F2,2 t .
0 sin t
4.9
In this case, we can take h1 0.1, hM 1.1. Then, by using the LMI control toolbox in Matlab,
solutions of LMIs 3.42 and 3.45 are given by
0.0438 0.0046
0.0153 0.0005
0.0037 0.0005
P1 ,
Q1 ,
R1 ,
0.0046 0.0081
0.0005 0.0001
0.0005 0.0010
0.0122 −0.0005
0.0272 −0.0010
0.0059 0.0001
U1 ,
P2 ,
Q2 ,
−0.0005 0.0006
−0.0010 0.0088
0.0001 0.0001
0.0006 −0.0002
0.0038 −0.0010
R2 ,
U2 ,
−0.0002 0.0022
−0.0010 0.0012
4.10
with stabilizing controllers
u1 t 0.6907 −6.5520 xt,
u2 t −0.1997 −5.6729 xt.
4.11
By computation, we obtain λ∗ 0.000007, λ1 132.7976, λ2 22.5048, λ3 0.0444, h∗ 0.5.
Thus, ρ 7.8829 × 10−5 , and from 3.3 we obtain
T0 ≥ 2.3855 × 104 .
4.12
Hence, from Theorem 3.2, the switched systems 4.6 with arbitrary switching law subject to
4.12 are robustly stabilizable under the feedback controllers which are shown in 4.11.
By choosing the same initial condition as in Example 4.1, the trajectories of solutions of the
switched system and the trajectories of solutions of subsystems 1 and 2 for this example are
shown in Figures 5, 6, 7, and 8.
Journal of Applied Mathematics
21
18
16
14
12
x
10
8
6
4
2
0
−2
0
5
10
15
20
25
30
35
40
45
50
t
x1
x2
Figure 5: The trajectory of solution of system i 1.
1.5
1
x
0.5
0
−0.5
−1
0
5
10
15
20
25
30
35
40
45
50
t
x1
x2
Figure 6: The trajectory of solution of system i 2.
5. Conclusion
In this paper, we study the problem of robust stabilization for a class of switched systems
with time-varying delay. Comparing with some existing results in the literature, the novelty
of our results is twofold. Firstly, the state delay is time-varying in which the restriction on the
derivative of the time-delay function is not required to design switching rule for the robust
22
Journal of Applied Mathematics
1
0.8
0.6
0.4
x
0.2
0
−0.2
−0.4
−0.6
−0.8
−1
0
5
10
15
20
25
30
35
40
45
50
t
x1
x2
Figure 7: The trajectory of solution of system i 1 under the feedback controller 4.12.
1
0.8
0.6
0.4
x
0.2
0
−0.2
−0.4
−0.6
−0.8
−1
0
5
10
15
20
25
30
35
40
45
50
t
x1
x2
Figure 8: The trajectory of solution of system i 2 under the feedback controller 4.12.
stability of the system. Secondly, the obtained conditions for the robust stability are delaydependent and formulated in terms of the solution of standard LMIs which can be solved by
various available algorithms. Numerical example is given to illustrate the effectiveness of the
theoretical result.
Journal of Applied Mathematics
23
Acknowledgments
The first author is supported by the Graduate School, Chiang Mai University and Thai
Government Scholarships in the area of science and technology Ministry of Science and
Technology. The second author is supported by the Center of Excellence in Mathematics,
Thailand, and Commission for Higher Education, Thailand.
References
1 P. J. Antsa, “A brief introduction to the theory and applications of hybrid systems,” Proceedings of the
IEEE, vol. 8, pp. 879–887, 2000.
2 R. L. Bennett and G. E. Policello, “Switching systems in the 21st century,” IEEE Communications
Magazine, vol. 3, pp. 24–28, 1993.
3 L. V. Hien, Q. P. Ha, and V. N. Phat, “Stability and stabilization of switched linear dynamic systems
with time delay and uncertainties,” Applied Mathematics and Computation, vol. 210, no. 1, pp. 223–231,
2009.
4 L. V. Hien and V. N. Phat, “Exponential stabilization for a class of hybrid systems with mixed delays
in state and control,” Nonlinear Analysis. Hybrid Systems, vol. 3, no. 3, pp. 259–265, 2009.
5 V. N. Phat, “Switched controller design for stabilization of nonlinear hybrid systems with timevarying delays in state and control,” Journal of the Franklin Institute, vol. 347, no. 1, pp. 195–207, 2010.
6 T. Botmart, P. Niamsup, and V. N. Phat, “Delay-dependent exponential stabilization for uncertain
linear systems with interval non-differentiable time-varying delays,” Applied Mathematics and
Computation, vol. 217, no. 21, pp. 8236–8247, 2011.
7 J. Liu, X. Liu, and W.-C. Xie, “Delay-dependent robust control for uncertain switched systems with
time-delay,” Nonlinear Analysis. Hybrid Systems, vol. 2, no. 1, pp. 81–95, 2008.
8 P. Niamsup, “Stability of time-varying switched systems with time-varying delay,” Nonlinear Analysis.
Hybrid Systems, vol. 3, no. 4, pp. 631–639, 2009.
9 V. N. Phat, T. Botmart, and P. Niamsup, “Switching design for exponential stability of a class of
nonlinear hybrid time-delay systems,” Nonlinear Analysis. Hybrid Systems, vol. 3, no. 1, pp. 1–10, 2009.
10 Y. Zhang, X. Liu, and X. Shen, “Stability of switched systems with time delay,” Nonlinear Analysis.
Hybrid Systems, vol. 1, no. 1, pp. 44–58, 2007.
11 Y. He, Q.-G. Wang, C. Lin, and M. Wu, “Delay-range-dependent stability for systems with timevarying delay,” Automatica, vol. 43, no. 2, pp. 371–376, 2007.
12 M. Wu, Y. He, J.-H. She, and G.-P. Liu, “Delay-dependent criteria for robust stability of time-varying
delay systems,” Automatica, vol. 40, no. 8, pp. 1435–1439, 2004.
13 L. V. Hien and V. N. Phat, “New exponential estimate for robust stability of nonlinear neutral timedelay systems with convex polytopic uncertainties,” Journal of Nonlinear and Convex Analysis, vol. 12,
pp. 541–552, 2011.
14 C.-H. Lien, K.-W. Yu, Y.-J. Chung, Y.-F. Lin, L.-Y. Chung, and J.-D. Chen, “Exponential stability
analysis for uncertain switched neutral systems with interval-time-varying state delay,” Nonlinear
Analysis. Hybrid Systems, vol. 3, no. 3, pp. 334–342, 2009.
15 M. S. Mahmoud and F. M. AL-Sunni, “Interconnected continuous-time switched systems: robust
stability and stabilization,” Nonlinear Analysis. Hybrid Systems, vol. 4, no. 3, pp. 531–542, 2010.
16 Z. Zhang and X. Liu, “Robust stability of uncertain discrete impulsive switching systems,” Computers
& Mathematics with Applications, vol. 58, no. 2, pp. 380–389, 2009.
17 G. Zong, S. Xu, and Y. Wu, “Robust H∞ stabilization for uncertain switched impulsive control systems
with state delay: an LMI approach,” Nonlinear Analysis. Hybrid Systems, vol. 2, no. 4, pp. 1287–1300,
2008.
18 S. Boyd, L. E. Ghaoui, E. Feron, and V. Balakrishnan, Linear Matrix Inequalities in System, SIAM,
Philadelphia, Pa, USA, 1994.
19 X.-M. Sun, J. Zhao, and D. J. Hill, “Stability and L2 -gain analysis for switched delay systems: a delaydependent method,” Automatica, vol. 42, no. 10, pp. 1769–1774, 2006.
20 W. Zhang, X.-S. Cai, and Z.-Z. Han, “Robust stability criteria for systems with interval time-varying
delay and nonlinear perturbations,” Journal of Computational and Applied Mathematics, vol. 234, no. 1,
pp. 174–180, 2010.
24
Journal of Applied Mathematics
21 D. Wang and W. Wang, “Delay-dependent robust exponential stabilization for uncertain systems with
interval time-varying delays,” Journal of Control Theory and Applications, vol. 7, no. 3, pp. 257–263, 2009.
22 Y. G. Sun, L. Wang, and G. Xie, “Stability of switched systems with time-varying delays: Delaydependent common Lyapunov functional approach,” in Proceedings of the American Control Conference,
vol. 5, pp. 1544–1549, 2006.
Advances in
Operations Research
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Advances in
Decision Sciences
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Mathematical Problems
in Engineering
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Journal of
Algebra
Hindawi Publishing Corporation
http://www.hindawi.com
Probability and Statistics
Volume 2014
The Scientific
World Journal
Hindawi Publishing Corporation
http://www.hindawi.com
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
International Journal of
Differential Equations
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Volume 2014
Submit your manuscripts at
http://www.hindawi.com
International Journal of
Advances in
Combinatorics
Hindawi Publishing Corporation
http://www.hindawi.com
Mathematical Physics
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Journal of
Complex Analysis
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
International
Journal of
Mathematics and
Mathematical
Sciences
Journal of
Hindawi Publishing Corporation
http://www.hindawi.com
Stochastic Analysis
Abstract and
Applied Analysis
Hindawi Publishing Corporation
http://www.hindawi.com
Hindawi Publishing Corporation
http://www.hindawi.com
International Journal of
Mathematics
Volume 2014
Volume 2014
Discrete Dynamics in
Nature and Society
Volume 2014
Volume 2014
Journal of
Journal of
Discrete Mathematics
Journal of
Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com
Applied Mathematics
Journal of
Function Spaces
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Optimization
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014