Document 10954107
advertisement

Hindawi Publishing Corporation
Mathematical Problems in Engineering
Volume 2012, Article ID 830154, 25 pages
doi:10.1155/2012/830154
Research Article
Robust Finite-Time H∞ Control for Impulsive
Switched Nonlinear Systems with State Delay
Jian Guo, Chao Liu, and Zhengrong Xiang
School of Automation, Nanjing University of Science and Technology, Nanjing 210094, China
Correspondence should be addressed to Zhengrong Xiang, xiangzr@mail.njust.edu.cn
Received 20 June 2012; Revised 9 September 2012; Accepted 10 September 2012
Academic Editor: Zidong Wang
Copyright q 2012 Jian Guo et al. This is an open access article distributed under the Creative
Commons Attribution License, which permits unrestricted use, distribution, and reproduction in
any medium, provided the original work is properly cited.
This paper investigates robust finite-time H∞ control for a class of impulsive switched nonlinear
systems with time-delay. Firstly, using piecewise Lyapunov function, sufficient conditions
ensuring finite-time boundedness of the impulsive switched system are derived. Then, finite-time
H∞ performance analysis for impulsive switched systems is developed, and a robust finite-time
H∞ state feedback controller is proposed to guarantee that the resulting closed-loop system is
finite-time bounded with H∞ disturbance attenuation. All the results are given in terms of linear
matrix inequalities LMIs. Finally, two numerical examples are provided to show the effectiveness
of the proposed method.
1. Introduction
A switched system is a hybrid dynamical system consisting of a family of continuous-time or
discrete-time subsystems and a switching law that orchestrates the switching between them
1. In the last decades, in the stability analysis and stabilization for switched systems, lots of
valuable results are established see 2–5. Most recently, on the basis of Lyapunov functions
and other analysis tools, the stability problem of linear and nonlinear switched systems
with time-delay has been further investigated see 6–15, and lots of valuable results are
established for H∞ control problems see 16–22.
It is well known that impulsive dynamical behaviors inevitably exist in some practical
systems like physical, biological, engineering, and information science systems due to abrupt
changes at certain instants during the dynamical process. Although hybrid system and
switched system are important models for dealing with complex real systems, there is little
work concerned with the above impulsive phenomena. Such a phenomenon can be modeled
2
Mathematical Problems in Engineering
as an impulsive switched system, it is characteristic that their states change during the
switching because of the occurrence of impulses 23.
In recent years, the impulsive switched systems have drawn more and more attention
and many useful conclusions have been obtained. Multiple Krasovskii-Lyapunov function
approach is employed to study the problem of ISS stability of a class of impulsive
switched systems with time-delay in 24. By the Lyapunov-Razumikhin technique, a delayindependent criterion of the exponential stability is established on the minimum dwell time
in 25. The problem of robust H∞ stabilization of nonlinear impulsive switched system with
time-delays is studied in 23.
Usually, the stability of a system is defined over an infinite-time interval. But in many
practical systems, we focus on the dynamical behavior of a system over a fixed finite-time
interval. Based on this, finite-time stability is first proposed by Dorato in 1961 26. Compared
with the classical Lyapunov stability, finite-time stability is proposed for the study of the
transient performance of the system, which is a totally different concept. The so-called finitetime stability means the boundedness of the state of a system over a fixed finite-time interval.
Finite-time stability problems can be found in 27–32. The finite-time stability of linear
impulsive systems is analyzed in 33, the finite-time stability and stabilization of impulsive
dynamic systems are carried out in 34–36. The finite-time stability and stabilization of
switched systems are investigated in 37.
Recently, robust finite-time control of switched systems is studied in 38, 39. However,
to the best of our knowledge, there are very few results on finite-time boundedness and
robust H∞ control of the impulsive switched systems, which motivates the present study.
The paper is organized as follows. In Section 2, problem formulation and some necessary
lemmas are given. In Section 3, based on the dwell time approach, finite-time boundedness
and finite-time H∞ performance for switched impulsive systems are addressed, and sufficient
conditions for the existence of a robust finite-time H∞ state feedback controller are proposed
in terms of a set of matrix inequalities. Numerical examples are provided to show the
effectiveness of the proposed approach in Section 4. Concluding remarks are given in
Section 5.
Notations. The notations used in this paper are standard. The notation P > 0 means that P
is a real positive definite matrix; diag{· · · } stands for a block-diagonal matrix; λmax P and
λ P denote the maximum and minimum eigenvalues of matrix P , respectively; xt min
∞
2
xT txt and xt2 0 xt dt1/2 .
2. Problem Formulation and Preliminaries
Consider the following impulsive switched system:
σt xt A
dσt xt − h B1σt u1 t fσt xt B2σt wt,
ẋt A
Δx Eσt xt u2 t,
t tk ,
k 1, 2, 3, . . .
t/
tk
2.1a
2.1b
zt Cσt xt Dσt u1 t,
2.1c
xt ϕt,
2.1d
t ∈ t0 − h, t0 ,
Mathematical Problems in Engineering
3
where xt ∈ Rn is the state vector, zt ∈ Rr is the controlled output, wt ∈ Rp is the
tk is the switched control input,
disturbance input which belongs to L2 0, ∞, u1 t ∈ Rm , t /
tk , k u2 tk ∈ Rn is the impulsive control input at tk , on the other hand, u2 t 0, t /
1, 2, 3, . . .. σt : t0 , ∞ → N {1, 2, . . . , N} is a switching signal. t ∈ tk , tk1 , σt ik ,
ik ∈ N, k 0, 1, 2, 3, . . .. Δxt xt − xt− , xt limh → 0 xt h, xt xt− limh → 0 xt − h. tk , k 0, 1, 2, 3, . . . are the impulsive jumping points or switching points.
t0 is the initial time, t0 < t1 < · · · < tk < · · · , and limk → ∞ tk ∞. h > 0 is the time-delay
which is a positive constant. fi · : Rn → Rn , i ∈ N is nonlinear vector-valued function.
i, A
di , B1i , i ∈ N are
ϕt, t ∈ t0 − h, t0 is a continuous vector-valued initial function. A
uncertain real-valued matrices with appropriate dimensions, B2i , Ei , Ci , Di , i ∈ N are known
real constant matrices with appropriate dimensions.
i, A
di , B1i are uncertain real-valued matrices with
Assumption 2.1. For each i ∈ N, A
appropriate dimensions. We assume that the uncertainties are of the form
di Adi ΔAdi ,
i Ai ΔAi ,
A
B1i B1i ΔB1i ,
A
ΔAi ΔAdi ΔB1i Hi Fi t EAi EAdi EBi ,
2.2a
2.2b
where Ai , Adi , B1i , Hi , EAi , EAdi , and EBi are known real-valued constant matrices with
appropriate dimensions, Fi t is the uncertain matrix satisfying
2.3
FiT tFi t ≤ I.
Assumption 2.2. For each i ∈ N, nonlinear vector-valued function fi satisfies Lipschitz
condition
fi xt ≤ Ui xt,
2.4
where Ui is the Lipschitz constant matrix.
Assumption 2.3. For a given time constant Tf > t0 , the external disturbance wt satisfies
Tf
2.5
wT twtdt ≤ d2 .
0
Assumption 2.4. For system 2.1a–2.1d, the impulsive jump matrices Ei satisfy that I Ei are invertible.
Definition 2.5 see 32. For a given time constant Tf > t0 , impulsive switched system 2.1a,
2.1b, 2.1c and 2.1d with u1 t ≡ 0, u2 t ≡ 0, and wt ≡ 0, is said to be finite-time stable
with respect to c12 , c22 , Tf , R, σt if the following inequality holds:
sup xT τRxτ ≤ c12 ⇒ xT tRxt < c22 ,
t0 −h≤τ≤t0
t ∈ t0 , T f ,
where c2 > c1 > 0, R is a positive definite matrix, and σt is a switching signal.
2.6
4
Mathematical Problems in Engineering
Remark 2.6. Equation 2.6 stands for the boundedness of the state of a system over a fixed
finite-time interval t0 , Tf , when the initial state is bounded.
Definition 2.7 see 40. For a given time constant Tf , impulsive switched system 2.1a–
2.1d with u1 t ≡ 0, u2 t ≡ 0, and wt satisfying 2.5, is said to be finite-time bounded
with respect to c12 , c22 , Tf , d2 , R, σt if the condition 2.6 holds, where c2 > c1 > 0, R is a
positive definite matrix and σt is a switching signal.
Definition 2.8. For any T2 > T1 > 0, let Nσt T1 , T2 denote the switching number of σt on an
interval T1 , T2 . If Nσt T1 , T2 ≤ N0 T2 − T1 /τa holds for given N0 ≥ 0, τa > 0, then the
constant τa is called the average dwell time. In this paper we let N0 0.
Definition 2.9. For a given time constant Tf , impulsive switched system 2.1a–2.1d
with u1 t ≡ 0, u2 t ≡ 0 is said to have finite-time H∞ performance with respect to
0, c22 , Tf , d2 , γ, R, σt if the system is finite-time bounded and the following inequality holds:
zt2 ≤ γwt2 ,
∀wt ∈ L2 0, ∞,
2.7
where c2 > 0, γ > 0, R is a positive definite matrix and σtis a switching signal.
Definition 2.10. For a given time constant Tf , impulsive switched system 2.1a–2.1d is
said to be robust finite-time stabilization with H∞ disturbance attenuation level γ, if there
tk and an impulsive controller u2 tk exists a switched controller u1 t Kσt xt, t /
K σt xtk , t tk , where t ∈ t0 , Tf such that
i the corresponding closed-loop system is finite-time bounded with respect to
0, c22 , Tf , d2 , R, σt;
ii under zero initial condition, inequality 2.7 holds for any wt satisfying 2.5.
Lemma 2.11. Let U, V , W, and X be real matrices of appropriate dimensions with X satisfying
X X T , then for all V T V ≤ I,
X UV W W T V T UT < 0,
2.8
if and only if there exists a scalar ε > 0 such that
X εUUT ε−1 W T W < 0.
2.9
Mathematical Problems in Engineering
5
3. Main Results
3.1. Finite-Time Boundedness Analysis
In this subsection, we focus on the finite-time boundedness of the following impulsive
switched system:
ẋt Aσt xt Adσt xt − h fσt xt B2σt wt,
Δx Eσt xt,
t tk ,
xt ϕt,
t/
tk
k 1, 2, 3, . . .
t ∈ t0 − h, t0 .
3.1a
3.1b
3.1c
Before proceeding to Lemma 3.2, we first introduce a function vt. For given positive
definite matrices Qik , ik ∈ N, by Assumption 2.4, there exists a real number ρik ≥ 1, ρ∗ max{ρik , ik ∈ N} such that
Qik−1 ≤ ρik I Eik−1 T Qik I Eik−1 .
3.2
Furthermore, we define the following function
vk t ρik −
ρik − 1 ,
t − tk 2 2
tk1 − tk t ∈ tk , tk1 .
3.3
Finally, a piecewise continuous function vt is as follows:
vt vk t,
t ∈ tk , tk1 .
3.4
Consider the function vt, for each interval tk , tk1 , vtk ρik , vtk1 1, and vt is
monotonically nonincreasing and bounded function, vtk1 ≤ vt ≤ vtk .
Remark 3.1. Note that the previous works require the condition Qik−1 ≤ I Eik−1 T Qik I Eik−1 see 23, 41, which can be obtained by setting ρik 1 in 3.2. Thus, the proposed approach
may provide more relaxed conditions.
Lemma 3.2. Consider the following Lyapunov functional candidate:
V t xT tPσt xt t
vsxT seαt−s Qσs xsds
3.5
t−h
for system 3.1a, 3.1b, and 3.1c, where Pi and Qi , i ∈ N are symmetric positive definite matrices
with appropriate dimensions.
6
Mathematical Problems in Engineering
The following inequality is derived:
V̇ t ≤ 2x tPik ẋt α
T
t
vsxT seαt−s Qσs xsds
t−h
vtxT tQik xt − vt − hxT t − hQik−m xt − heαh
t ∈ tk , tk1 ,
t − h ∈ tk−m , tk−m1 ,
3.6
m ∈ {0, 1, 2, 3, . . .}.
Proof. i When tk h ≥ tk1 ,
V t x tPσt xt T
t
vsxT seαt−s Qσs xsds
t−h
xT tPik xt tk−m2
tk−m1
t−h
vsx se
T
tk−m1
V̇ t 2xT tPik ẋt α
vsxT seαt−s Qik−m xsds
αt−s
t
Qik−m1 xsds · · · t
tk
vsxT seαt−s Qik xsds,
vsxT seαt−s Qσs xsds
t−h
vtk−m1 x tk−m1 eαt−tk−m1 Qik−m xtk−m1 T
− vt − hxT t − heαh Qik−m xt − h
vtk−m2 xT tk−m2 eαt−tk−m2 Qik−m1 xtk−m2 − v tk−m1 xT tk−m1 eαt−tk−m1 Qik−m1 x tk−m1 · · · vtk xT tk eαt−tk Qik−1 xtk − v tk−1 xT tk−1 eαt−tk Qik−1 x tk−1 vtxT tQik xt
− v tk xT tk eαt−tk Qik x tk ,
t
T
V̇ t 2x tPik ẋt α
vsxT seαt−s Qσs xsds
t−h
vtxT tQik xt − vt − hxT t − heαh Qik−m xt − h
xT tk−m1 eαt−tk−m1 Qik−m − ρik−m1 I Eik−m T Qik−m1 I Eik−m xtk−m1 . . .
xT tk eαt−tk Qik−1 − ρik I Eik−1 T Qik I Eik−1 xtk .
3.7
Mathematical Problems in Engineering
7
From 3.2, we can obtain that
Qik−m − ρik−m1 I Eik−m T Qik−m1 I Eik−m ≤ 0
..
.
3.8
Qik−1 − ρik I Eik−1 T Qik I Eik−1 ≤ 0.
Combining 3.7 and 3.8, 3.6 is obtained.
ii When tk h < tk1 ,
1 t ∈ tk , tk h, the proof is similar to the proof line in the situation i.
2 t ∈ tk h, tk1 ,
V t xT tPσt xt xT tPik xt t
t
vsxT seαt−s Qσs xsds
t−h
t−h
3.9
vsxT seαt−s Qik xsds.
The proof for this situation is omitted.
The proof is completed.
Lemma 3.3. Consider the following Lyapunov function:
V t xT tPσt xt t
vsxT seαt−s Qσs xsds
3.10
t−h
for system 3.1a, 3.1b, and 3.1c, where Pi and Qi , i ∈ {1, 2, . . . , N} are symmetric positive
definite matrices with appropriate dimensions. Under the condition
⎤
⎡ αh ∗
EiT
−e ρ Pj I EjT
⎥
⎢
∗
−Pi−1
0
⎦ < 0,
⎣
−1
−1
−αh
∗
Qi
∗
∗
−e
ρ
∀i, j ∈ N,
3.11
we have
V tk < eαh ρ∗ V tk ,
where ρ∗ max{ρik , ik ∈ N}.
3.12
8
Mathematical Problems in Engineering
Proof. Without loss of generality, let σtk i, σtk j. Then, we have
V tk xT tk Pσtk x tk t
k
tk −h
vsxT seαtk −s Qσs xsds
≤ x tk Pσtk x tk eαh ρ∗
T
t
k
tk −h
xT sQσs xsds
T ≤ x tk I Ej Pi I Ej xtk eαh ρ∗ xT tk EjT Qi Ej xtk T
αh ∗
e ρ
tk
tk −h
3.13
vsxT seαtk −s Qσs xsds,
V tk x tk Pj xtk T
tk
tk −h
vsxT seαtk −s Qσs xsds.
3.14
Combining 3.13 with 3.14, we have
T V tk − eαh ρ∗ V tk ≤ xT tk I Ej Pi I Ej xtk eαh ρ∗ xT tk EjT Qi Ej xtk − eαh ρ∗ xT tk Pj xtk 3.15
xT tk Σij xtk ,
where
T I Ej Pi I Ej eαh ρ∗ EjT Qi Ej − eαh ρ∗ Pj .
ij
3.16
Using Schur complement, 3.11 is equivalent to
Σij < 0 or
The proof is completed.
V tk − eαh ρ∗ V tk < 0.
3.17
Mathematical Problems in Engineering
9
i R−1/2 Qi R−1/2 , For all i ∈
Theorem 3.4. R is a positive definite matrix. Let Pi R−1/2 Pi R−1/2 , Q
∗
N, if there exist positive scalars ρi ≥ 1, i ∈ N, ρ max{ρi , i ∈ N}, α, λ1 , λ2 , λ3 and symmetric
positive matrices Pi , Pj , Qi , Ti , i, j ∈ N such that
1
i ≤ 0,
j I Ei −T − Q
I Ei −1 Q
ρ∗
∀i, j ∈ N
⎡
⎤
i B2i
Pi ATi Ai Pi − αPi I Adi Q
Pi
⎢
⎥
j 0
⎢
⎥
∗
−eαh Q
0
⎢
⎥ < 0,
⎢
⎥
0
∗
∗
−Ti ⎦
⎣
T
∗ −1 ∗
∗
∗ − ρ Qi Uik Uik
⎡
⎤
−eαh ρ∗ Pj Pj I EjT
Pj EjT
⎢
⎥
⎢
⎥ < 0,
∗
−Pi
0
⎣
∗ −1 ⎦
−αh
i
∗
∗
−e
Q
ρ
3.18
∀i, j ∈ N
∀i, j ∈ N
i , Ti < λ3 I, ∀i ∈ N
λ1 R−1 < Pi < R−1 , λ2 R−1 < Q
⎤
⎡ 2 −αTf
d2 λ3 c1
c1
−c2 e
⎥
⎢
∗
−λ1
0
⎥<0
⎢
⎣
1 −αh ⎦
∗
∗ − ∗ e λ2
ρ h
3.19
3.20
3.21
3.22
hold, under the average dwell time scheme
τa >
τa∗
Tf αh ln ρ∗
2 −αT ,
ln c2 e f − ln 1/λ1 hρ∗ eαh /λ2 c12 d2 λ3
3.23
system 3.1a–3.1c is finite-time bounded with respect to c12 , c22 , Tf , d2 , R, σt.
Proof. Assuming that when t ∈ tk , tk1 , σt ik , ik ∈ N, k 0, 1, 2, 3, . . ..
Choose the following Lyapunov functional candidate:
−1
V t x tPσt
xt T
t
t−h
−1 xsds.
vsxT seαt−s Q
σs
3.24
10
Mathematical Problems in Engineering
When t ∈ tk , tk1 , according to 3.18 and Lemma 3.2, we have
V̇ t ≤ 2xT tPi−1
ẋt α
k
vtx
T
t−h
−1 xt
tQ
ik
ẋt α
V̇ xt − αV xt − w tTik wt ≤ 2x tPi−1
k
T
t
T
−1 xsds
vsxT seαt−s Q
σs
−1 xt − heαh ,
− vt − hxT t − hQ
ik−m
t
t−h
−1 xsds
vsxT seαt−s Q
σs
−1 xt − vt − hxT t − hQ
−1 xt − heαh
vtxT tQ
ik
ik−m
− αx tPi−1
xt − α
k
T
t
t−h
−1 xsds
vsxT seαt−s Q
σs
− wT tTik wt
−1 xt
≤ 2xT tPi−1
ẋt ρ∗ xT tQ
ik
k
−1 xt − heαh − αxT tP −1 xt
− xT t − hQ
ik−m
ik
− wT tTik wt.
3.25
According to 3.1a–3.1c, and 3.25, Assumption 2.2, and the fallowing inequality:
2xT tPi−1
fxt ≤ fiTk xtfik xt xT tPi−1
xt
Pi−1
k
k
k
≤ xT tUiTk Uik xt xT tPi−1
xt,
Pi−1
k
k
3.26
we have
V̇ xt − αV xt − wT tTik wt ≤ X T tΞk Xt,
3.27
where X T t xT txT t − hwT t,
⎤
⎡
Adik Pi−1
B2ik
Δk Pi−1
k
k
⎥
⎢
−1
Ξk ⎣ ∗ −eαh Q
0 ⎦,
ik−m
∗
∗
−Tik
3.28
−1 − αP −1 UT Uik P −1 P −1 .
Δk ATik Pi−1
Pi−1
Aik ρ∗ Q
ik
ik
ik
ik ik
k
k
Using Schur complement, we obtain from 3.19 that
⎤
⎡
Oi Pi−1 Adi Pi−1 B2i
⎥
⎢
−1
0 ⎦ < 0,
⎣ ∗ −eαh Q
j
∗
∗
−Ti
3.29
Mathematical Problems in Engineering
11
where
−1 − αP −1 UT Ui P −1 P −1 .
Oi ATi Pi−1 Pi−1 Ai ρ∗ Q
i
i
i
i
i
3.30
Noticing that the above inequality holds for all i, j ∈ N, then we have Ξk < 0 for ik , ik−1 ∈ N.
Thus,
3.31
V̇ xt − αV xt − wT tTik wt < 0.
When t ∈ tk , tk1 , according to Lemma 3.3, we can obtain 3.12 from condition 3.20.
Combining 3.31 and 3.12, we can obtain that
V t < e
<e
αt−tk V tk t
eαt−s wT sTik wsds
tk
αt−tk αh ∗
e ρ V tk t
tk
<e
αt−tk αh ∗
e ρ e
t
tk
αtk −tk−1 eαt−s wT sTik wsds
V
tk−1
tk
e
αtk −s
tk−1
w sTik−1 wsds
T
eαt−s wT sTik wsds
< ···
<e
αt−t0 αh ∗
e ρ
Nσ t0 ,t
αh ∗
V t0 e ρ
Nσ t0 ,t t1
eαt−s wT sTi0 wsds
t0
αh ∗
e ρ
Nσ t1 ,t t2
· · · eαh ρ∗
tk
tk−1
eαt−t0 eαh ρ∗
e
αt−s
w sTi1 wsds
t1
eαt−s wT sTik−1 wsds Nσ t0 ,t
3.32
T
V t0 t
t
tk
eαt−s eαh ρ∗
eαt−s wT sTik wsds
Nσ s,t
t0
<e
<e
αt
αTf
αh ∗
e ρ
Nσ t0 ,t
αh ∗
e ρ
αh ∗
V t0 e ρ
Nσ t0 ,t
Nσ t0 ,t
e
αt
t
t0
V t0 Tf
t0
wT sTik wsds
w sTik wsds
T
Nσ t0 ,t V t0 λmax Tik d2 .
< eαTf eαh ρ∗
wT sTik wsds
12
Mathematical Problems in Engineering
Noticing that Nσ t0 , Tf < Tf /τa and according to 3.21, we have
T /τ V t < eααh/τa Tf ρ∗ f α V t0 λ3 d2 ,
V t ≥ xT tPi−1
xt xT tR1/2 Pi−1
R1/2 xt
k
k
xT tRxt ≥ λmin Pi−1
k
3.33
1
xT tRxt.
λmax Pik Because λ1 R−1 < Pi < R−1 , we have
3.34
V t > xT tRxt.
According to the Lyapunov function that we have chosen, we have
V t0 xT t0 Pi−1 xt0 t0
−1 xsds
vsxT se−αt0 −s Q
i
t0 −h
≤ max λmax Pi−1 xT t0 Rxt0 i∈N
heαh ρ∗ max λmax Qi−1 sup xT θRxθ
3.35
t0 −h≤θ≤t0
i∈N
⎛
⎞
∗
αh
he
ρ
1
⎠ sup xT θRxθ.
≤⎝
min λmin Pi min λmin Qi t0 −h≤θ≤t0
i∈N
i∈N
According to 3.21, the following inequality is derived:
V t0 <
ρ∗ heαh
1
λ1
λ2
3.36
c12 .
Combining 3.33, 3.34, and 3.36, we can obtain that
x tRxt < V t < e
T
ααh/τa Tf
∗ Tf /τα
ρ
ρ∗ heαh
1
λ1
λ2
c12
λ3 d .
2
3.37
Using Schur complement, 3.22 is equivalent to
ρ∗ heαh
1
λ1
λ2
From 3.38, we can obtain that τa > 0.
c12 λ3 d2 < c22 e−αTf .
3.38
Mathematical Problems in Engineering
13
Substituting 3.23 into 3.37 leads to
3.39
xT tRxt < c22 .
Thus, system 3.1a–3.1c is finite-time bounded with respect to c12 , c22 , Tf , d2 , R, σt.
The proof is completed.
i Corollary 3.5. R is a positive definite matrix, let wt ≡ 0, Pi R−1/2 Pi R−1/2 , Q
−1/2
−1/2
∗
Qi R
for all i ∈ N. If there exist positive scalars ρi ≥ 1, i ∈ N, ρ max{ρi , i ∈ N},
R
α, λ1 , λ2 and symmetric positive matrices Pi , Pj , Qi for all i, j ∈ N with appropriate dimensions such
that
1
i ≤ 0,
j I Ei −T − Q
I Ei −1 Q
ρ∗
∀i, j ∈ N
⎡ T
⎤
i
Pi Ai Ai Pi − αPi I Adi Q
Pi
⎢
⎥
j
∗
−eαh Q
0
⎣
⎦ < 0,
−1
T
i U Uik
∗
∗
− ρ∗ Q
ik
⎡
⎤
−eαh ρ∗ Pj Pj I EjT
Pj EjT
⎢
⎥
⎢
⎥ < 0,
∗
−Pi
0
⎣
⎦
−1
−αh
∗
∗
∗
−e
Qi
ρ
∀i, j ∈ N
∀i, j ∈ N
3.40
i , ∀i ∈ N
λ1 R−1 < Pi < R−1 , λ2 R−1 < Q
⎤
⎡ 2 −αTf
c1
c1
−c2 e
⎥
⎢ ∗
−λ1
0
⎥<0
⎢
⎣
1 −αh ⎦
∗
∗ − ∗ e λ2
ρ h
hold with average dwell time
τa >
τa∗
Tf αh ln ρ∗
2 −αT .
ln c2 e f − ln 1/λ1 ρ∗ heαh /λ2 c12
System 3.1a–3.1c with wt ≡ 0 is finite-time stable with respect to c12 , c22 , Tf , R, σt.
3.41
14
Mathematical Problems in Engineering
3.2. H∞ Performance Analysis
In this subsection, H∞ performance of the following system is investigated:
ẋt Aσt xt Adσt xt − h fσt xt B2σt wt,
Δx Eσt xt,
t tk ,
t/
tk
k 1, 2, 3, . . .
zt Cσt xt,
xt ϕt,
3.42a
3.42b
3.42c
t ∈ t0 − h, t0 3.42d
i R−1/2 Qi R−1/2 for all i ∈
Theorem 3.6. R is a positive definite matrix. Let Pi R−1/2 Pi R−1/2 , Q
∗
N. Suppose that there exist positive scalars ρi ≥ 1, i ∈ N, ρ max{ρi , i ∈ N}, α, γ, ε and symmetric
positive matrices Pi , Pj , Qi for all i, j ∈ N such that
1
i ≤ 0,
j I Ei −T − Q
I Ei −1 Q
ρ∗
∀i, j ∈ N
⎤
⎡
i B2i
Pi ATi Ai Pi − αPi I Adi Q
Pi
Pi CiT
⎥
⎢
j 0
⎢
∗
−eαh Q
0
0 ⎥
⎥
⎢
2
⎥
⎢
0
∗
∗
−γ
0 ⎥ < 0, ∀i, j ∈ N
⎢
⎢
T
∗ −1 ∗
∗
∗ − ρ Qi Uik Uik
0 ⎥
⎦
⎣
∗
∗
∗
∗
−I
⎤
⎡
−eαh ρ∗ Pj Pj I EjT
Pj EjT
⎥
⎢
⎥ < 0, ∀i, j ∈ N
⎢
∗
−Pi
0
⎦
⎣
−1 ∗
∗
−e−αh ρ∗ Q
i
Pi < R−1 ,
3.43
3.44
3.45
∀i ∈ N
3.46
−c22 eαTf γ 2 d2 < 0
3.47
hold with average dwell time
τa >
τa∗
Tf αh ln ρ∗
h
.
max
2
αT 2 2 ,
f
ε
ln c2 − ln e γ d
3.48
Then, system 3.42a–3.42d is finite-time bounded and has H∞ performance with respect to
0, c22 , Tf , d2 , γ, R, σt, where γ 2 e1εαTf ρ∗ εTf /h γ 2 .
Proof. When t ∈ tk , tk1 , σt ik , ik ∈ N, k 0, 1, 2, 3, . . .. Choose the following Lyapunov
functional candidate for system 3.42a–3.42d
−1
xt V t x tPσt
T
t
t−h
−1 xsds.
vsxT seαt−s Q
σs
3.49
Mathematical Problems in Engineering
15
When t ∈ tk , tk1 ,
V̇ xt − αV xt zT tzt − γ 2 wT twt ≤ X T tΨk Xt,
3.50
where X T t xT t xT t − h wT t,
⎡
⎤
Adik Pi−1
B2ik
Δk Pi−1
k
k
⎢
⎥
−1
Ψk ⎣ ∗ −eαh Q
0 ⎦,
ik−m
∗
∗
−γ 2 I
3.51
−1 − αP −1 UT Uik P −1 P −1 CT Cik .
Δk ATik Pi−1
Pi−1
Aik ρ∗ Q
ik
ik
ik
ik
ik ik
k
k
Using Schur complement, we obtain from 3.44 that
⎡
⎤
Ei Pi−1 Adi Pi−1 B2i
⎢
⎥
−1
0 ⎦ < 0,
⎣ ∗ −eαh Q
j
∗
∗
−γ 2 I
3.52
−1 − αP −1 UT Ui P −1 P −1 CT Ci .
where Ei ATi Pi−1 Pi−1 Ai ρ∗ Q
i
i
i
i
i
i
Noticing that the above inequality holds for all i, j ∈ N, then we have Ψk < 0, for
ik , ik−m ∈ N.
Thus,
V̇ xt − αV xt zT tzt − γ 2 wT twt < 0,
3.53
Let γ 2 wT sws − zT szs Δs, from 3.32, we have
V t < e
αt−t0 αh ∗
e ρ
Nσ t0 ,t
V t0 t
Nσ s,t
eαt−s eαh ρ∗
Δsds.
3.54
t0
Under zero initial condition, we have
t
0<
Nσ s,t
eαt−s eαh ρ∗
Δsds,
3.55
t0
that is,
t
t
Nσ s,t
Nσ s,t
eαt−s eαh ρ∗
zT szsds <
eαt−s eαh ρ∗
γ 2 wT swsds.
t0
3.56
t0
Noticing that
t
t0
t
Nσ s,t
eαt−s eαh ρ∗
zT szsds >
zT szsds.
t0
3.57
16
Mathematical Problems in Engineering
Then, we have
t
Nσ s,t
Nσ t0 ,t t
eαt−s eαh ρ∗
γ 2 wT swsds < eαt eαh ρ∗
γ 2 wT swsds.
t0
3.58
t0
Let t Tf , because τa > h/ε, we have
Tf
z szsds < e
T
1εαTf
εT /h
ρ∗ f γ 2
t0
Tf
3.59
wT swsds,
t0
then
Tf
z szsds < γ
T
2
t0
Tf
3.60
wT swsds.
t0
Thus, system 3.42a–3.42d is finite-time bounded and has H∞ performance with respect to
0, c22 , Tf , d2 , γ, R, σt, where γ 2 e1εαTf ρ∗ εTf /h γ 2 .
The proof is completed.
Remark 3.7. When ρ∗ 1, Theorem 3.6 degenerates to the result of 41, which cannot
guarantee the finite-time boundedness of the addressed system if ρ∗ > 1.
3.3. Robust Finite-Time H∞ Control
Consider system 2.1a–2.1d, under the switching controller u1 t Kσt xt, t / tk and
impulsive controller u2 tk K σt xtk , t tk , the corresponding closed-loop system is
given by
dσt xt − h fσt xt B2σt wt,
σt B1σt Kσt xt A
ẋt A
Δx Eσt K σt xt,
t tk , k 1, 2, 3, . . .
zt Cσt Dσt Kσt xt,
xt ϕt,
t ∈ t0 − h, t0 .
t
/ tk
3.61a
3.61b
3.61c
3.61d
i Theorem 3.8. Consider impulsive switched system 2.1a–2.1d, let Pi R−1/2 Pi R−1/2 , Q
R−1/2 Qi R−1/2 for all i ∈ N. If there exist positive scalars ρi ≥ 1, i ∈ N, ρ∗ max{ρi , i ∈
N} α, γ, ε, δi and positive definite symmetric matrices Pi , Qi , and matrices Yi , i ∈ N, with
appropriate dimensions, such that the following inequalities hold
Mathematical Problems in Engineering
17
1
i ≤ 0,
j I Ei −T − Q
I Ei −1 Q
ρ∗
∀i, j ∈ N
⎤
⎡
T
T
i B2i
Γi Adi Q
Pi EAi
Pi
Pi CiT YiT DiT YiT EBi
⎥
⎢
⎥
⎢
⎥
⎢ ∗ −eαh Q
T
0
0
0
Qi EAdi
⎥
⎢
j
⎥
⎢
2
∗
−γ
0
0
0
⎥ < 0,
⎢∗
⎥
⎢
T
∗ −1 ⎥
⎢∗
∗
∗ − ρ Qi Uik Uik
0
0
⎥
⎢
⎥
⎢
⎦
⎣∗
∗
∗
∗
−I
0
∗
∗
∗
∗
∗
−δi
3.62
∀i, j ∈ N,
3.63
where
T
Γi Pi ATi YiT B1i
Ai Pi B1i Yi − αPi I δi Hi HiT ,
⎤
⎡ αh ∗
−e ρ Pj Pj
⎦ < 0, ∀i, j ∈ N
⎣
∗
−Pi
Pi < R−1 ,
3.64
i ∈ N,
3.65
−c22 eαTf γ 2 d2 < 0.
3.66
Then, under the controller Ki Yi Pi−1 , K i −Ei , and the following average dwell time scheme
τa >
τa∗
Tf αh ln ρ∗
h
,
max
2
αT 2 2 ,
f
ε
ln c2 − ln e γ d
3.67
the corresponding closed-loop system is finite-time bounded with H∞ performance with respect to
0, c22 , Tf , d2 , γ, R, σt and γ 2 e1εαTf ρ∗ εTf /h γ 2 .
Proof. According to Assumption 2.1, we have
i B1i Ki Ai B1i Ki Hi Fi EAi EBi Ki ,
A
di Adi Hi Fi EAdi .
A
3.68
i B1i Ki , A
di , Ci Di Ki , we can obtain
Now replacing Ai , Adi , Ci in the left side of 3.44 with A
that
⎤
⎡
i B2i
Ωi Adi Hi Fi EAdi Q
Pi
Pi Ci Di Ki T
⎥
⎢
j
⎥
⎢∗
−eαh Q
0
0
0
⎥
⎢
2
⎥,
⎢
0
0
∗
−γ
Θij ⎢ ∗
⎥
⎥
⎢∗
T
∗ −1 ∗
∗ − ρ Qi Uik Uik
0
⎦
⎣
∗
∗
∗
∗
−I
3.69
18
Mathematical Problems in Engineering
where
Ωi Ai B1i Ki Hi Fi EAi EBi Ki Pi Pi Ai B1i Ki Hi Fi EAi EBi Ki T − αPi I.
3.70
From 3.69, we know that
Θij Π1ij Π2ij ,
3.71
where
Π1ij
⎤
⎡
i B2i
Υ1i Adi Q
Pi
Pi Ci Di Ki T
⎥
⎢
j 0
⎥
⎢ ∗ −eαh Q
0
0
⎥
⎢
2
⎥,
⎢
0
0
∗
∗
−γ
⎢
⎥
⎥
⎢∗
T
∗ −1 ∗
∗ − ρ Qi Uik Uik
0
⎦
⎣
∗
∗
∗
∗
−I
⎡
⎤
i 0 0 0
Υ2i Hi Fi EAdi Q
⎢∗
0
0 0 0⎥
⎢
⎥
⎢
⎥
Π2ij ⎢ ∗
∗
0 0 0⎥,
⎢
⎥
⎣∗
∗
∗ 0 0⎦
∗
∗
∗ ∗ 0
3.72
with
Υ1i Pi Ai B1i Ki T Ai B1i KPi − αPi I,
Υ2i Pi EAi EBi Ki T FiT HiT Hi Fi EAi EBi Ki Pi ,
3.73
let Yi Ki Pi , then
T
Ai Pi B1i Yi − αPi I,
Υ1i Pi ATi YiT B1i
T
T
FiT HiT Hi Fi EAi Pi EBi Yi .
Υ2i YiT EBi
Pi EAi
3.74
Mathematical Problems in Engineering
19
From Lemma 2.11, we can obtain that
⎡ ⎤
Hi
⎢0⎥
⎢ ⎥ ⎢ ⎥
i 0 0 0
Θij Π1ij ⎢ 0 ⎥Fi EAi Pi EBi Yi EAdi Q
⎢ ⎥
⎣0⎦
0
⎡
⎤
T
T
YiT EBi
Pi EAi
⎢
⎥
⎢
⎥
⎢
⎥ T
Qi EAdi
⎢
⎥
⎢
⎥Fi HiT 0 0 0 0
0
⎢
⎥
⎢
⎥
⎣
⎦
0
0
⎡ ⎤
Hi
⎢0⎥
⎢ ⎥
⎢ ⎥
≤ Π1ij δi ⎢ 0 ⎥ HiT 0 0 0 0
⎢ ⎥
⎣0⎦
0
⎡
⎤
T
T
YiT EBi
Pi EAi
⎢
⎥
⎢
⎥
⎢
⎥
T
1⎢
Qi EAdi
⎥
i 0 0 0 .
⎢
⎥ EAi Pi EBi Yi EAdi Q
0
⎥
δi ⎢
⎢
⎥
⎣
⎦
0
0
3.75
Using Schur complement lemma, we get from 3.63 that
Θij < 0.
3.76
Now we choose K i −Ei , and replacing Ei in 3.45 with Ei K i , we know that
⎡
⎤
0
−eαh ρ∗ Pj Pj
⎢
⎥
∗
−Pi
0
⎣
⎦ < 0,
−1 ∗
∗ −e−αh ρ∗ Q
i
3.77
by 3.64, we know that the condition3.45 hold.
Then, system 2.1a–2.1d is robust finite-time bounded with H∞ performance with
respect to 0, c22 , Tf , d2 , γ, R, σt, and γ 2 e1εαTf ρ∗ εTf /h γ 2 .
The proof is completed.
Remark 3.9. In order to eliminate the impulsive jump, we design an impulsive feedback
controller K i −Ei , t tk . Then the system becomes a switched system with continuous
states.
20
Mathematical Problems in Engineering
4. Numerical Examples
In this section, we present two examples to illustrate the effectiveness of the proposed
approach.
Example 4.1. Consider system 2.1a–2.1d with the following parameters.
Subsystem 1
!
A1 !
!
"
−1.3 0.1
−0.1
,
H1 0.2 −1
0.2
!
!
"
"
0.43 0
0.1 0
E1 ,
U1 ,
0 0.15
0 0.1
!
!
"
0.2 0.1
1
EB1 ,
B21 0 −0.3
2
!
"
!
"
1 1
0.8 0
,
D1 ,
EA1
C1 0 2
0 0.2
"
−8 1
,
2 −7
Ad1 "
0.3
,
0.4
B11
EAd1 !
"
3 −3
,
0 4
"
−1
,
1
!
"
−0.3 −0.1
,
0.2 −0.1
!
"
0.2 0.1
,
0.3 −0.2
4.1
f1 xt 0.1 sin xt, where f1 xt < U1 xt.
Subsystem 2
!
!
!
!
"
"
"
"
−7 2
−1.2 0.1
−0.1 0.2
−0.3 0.1
,
Ad2 ,
H2 ,
EAd2 ,
1 −6
0.3 −1.1
−0.2 −0.1
0.2 −0.3
!
!
!
!
"
"
"
"
0.15 0
0.2 0
4 −1
−0.3 0.1
E2 ,
U2 ,
B12 ,
EB2 ,
0 0.4
0 0.18
1 6
0 0.2
!
!
!
!
"
"
"
"
−1 0
2 1
0.8 0
0.1 0.3
B22 ,
C2 ,
D2 ,
EA2 ,
2 0.8
0 3
1 −1
0.2 −0.2
4.2
A2 f2 xt 0.18 cos xt, where f2 xt < U2 xt.
Choosing Tf 12, h 0.2, d2 10, R I, α 0.1, C22 2, ε 0.1, γ 2 0.5441, ρ∗ 1,
solving the LMIs in 3.62–3.66 leads to
Mathematical Problems in Engineering
21
!
!
"
"
1.3506 −0.1265
0.0234
2 0.5042 0.0525 ,
,
Q
Y1 −0.1265 0.7891
0.0525 0.3221
0.1631
!
!
!
"
"
−0.0001 −0.5221
0.9887 0.0011
0.9995
Y2 ,
P1 ,
P2 0.1109 0.0371
0.0011 0.9921
−0.0001
!
"
!
"
0.0241 −0.3605
−0.0001 −0.5218
,
K2 ,
K1 0.1647 0.2699
0.1109 0.0371
1 Q
!
−1
Q
1
− I E1 T
−1 I
Q
1
"
−0.3577
,
0.2680
"
−0.0001
,
1.0006
4.3
E1 ≤ 0,
−1 − I E2 T Q
−1 I E2 ≤ 0,
Q
2
1
−1 − I E2 T Q
−1 I E2 ≤ 0,
Q
2
2
−1 − I E1 T Q
−1 I E1 ≤ 0,
Q
2
1
τa > τa∗ 1.2049, we choose τa 2, γ 2 e1εαTf ρ∗ εαTf γ 2 2.0368, then the system is
finite-time bounded according to 41, Theorem 3.
Example 4.2. Consider system 2.1a–2.1d with the following parameters.
Subsystem 1
!
!
!
!
"
"
"
"
−8 1
−1.3 0.1
−0.1 0.3
0.2 0.1
,
Ad1 ,
H1 ,
EAd1 ,
2 −7
0.2 −1
0.2 0.4
0.3 −0.2
!
!
!
!
"
"
"
"
−0.1 0
0.01 0
3 −3
0.2 0.1
E1 ,
U1 ,
B11 ,
EB1 ,
0 −0.1
0 0.01
0 4
0 −0.3
!
!
!
!
"
"
"
"
1 −1
−3 1
8 0
−3 −0.1
B21 ,
C1 ,
D1 ,
EA1 ,
2 1
0 −2
0 2
0.2 −1
A1 4.4
f1 xt 0.01 sin xt.
Subsystem 2
!
"
!
"
!
"
!
"
−7 2
−1.2 0.1
−0.1 0.2
−0.3 0.1
,
Ad2 ,
H2 ,
EAd2 ,
1 −6
0.3 −1.1
−0.2 −0.1
0.2 −0.3
!
"
!
"
!
"
!
"
−0.1 0
0.02 0
4 −1
−0.3 0.1
E2 ,
U2 ,
B12 ,
EB2 ,
0 −0.1
0 0.08
1 6
0 0.2
!
!
!
!
"
"
"
"
−1 0
−2 1
8 0
−1 0.3
B22 ,
C2 ,
D2 ,
EA2 ,
2 0.8
0 −3
1 8
0.2 −2
4.5
A2 f2 xt 0.02 cos xt.
22
Mathematical Problems in Engineering
1 Let h 0.2, Tf 12, d2 10, R I, α 0.001, C22 21, ρ∗ 1.3, γ 2 0.9344. By
solving the LMIs in 3.62–3.66, we can get
!
0.4252
Q1 0.0387
!
0.1064
Y2 −0.1260
"
0.0387
,
1.2272
"
−0.2575
,
0.2934
!
0.2329
K1 −0.2389
!
!
"
"
0.4352 0.0470
0.0866 −0.4834
Q2 ,
Y1 ,
0.0470 1.2369
−0.0863 0.5554
!
!
"
"
0.4606 0.0418
0.5364 −0.0611
P1 ,
P2 ,
0.0418 0.9965
−0.0611 0.9884
"
!
"
−0.4949
0.1699 −0.2500
,
K2 ,
0.5673
−0.2024 0.2844
4.6
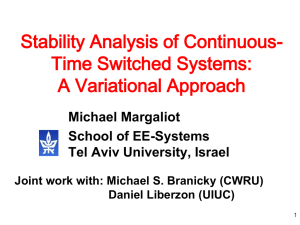
and τa > τa∗ 3.8340. We choose τa 4, ε 0.05, γ 2 0.9464, the initial condition
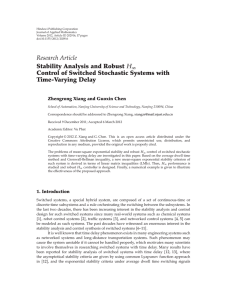
xt 0, t ∈ −h, 0, the switching signal is shown in Figure 1, and state trajectories
of the closed-loop system are shown in Figure 2.
We can see from Figure 2 that the states of the system are continuous due to the
feedback K i in impulsive instants.
2 Let h 0.2, Tf 12, d2 10, R I, and α 0.001. By solving the LMIs of 41,
Theorem 3, we can get
!
"
0.4015 0.0359
,
Q1 0.0359 1.0563
!
"
0.1279 −0.2380
Y2 ,
−0.1006 0.2699
!
0.2349
K1 −0.1896
!
"
!
"
0.5224 0.1104
0.1245 −0.6523
Q2 ,
Y1 ,
0.1104 1.0717
−0.0998 0.5952
!
"
!
"
0.5577 0.0099
0.5577 0.0099
P1 ,
P2 ,
0.0099 0.9992
0.0099 0.9992
!
"
"
−0.6552
0.2336 −0.2405
,
K2 ,
0.5976
−0.1852 0.2720
4.7
−1 I E1 > 0,
−1 − I E1 T Q
Q
1
1
−1 − I E2 T Q
−1 I E2 > 0,
Q
2
1
−1 − I E2 T Q
−1 I E2 > 0,
Q
2
2
−1 − I E1 T Q
−1 I E1 > 0.
Q
2
1
Obviously, the above inequalities do not satisfy the conditions of 41, Theorem 3. Thus, we
cannot draw the conclusion that the closed-loop system is finite-time bounded from Theorem
3 in 41.
5. Conclusions
This paper has investigated robust finite-time H∞ control for a class of impulsive switched
nonlinear systems with time-delay. Based on piecewise Lyapunov function, sufficient
conditions which guarantee finite-time boundedness of the impulsive switched system are
Mathematical Problems in Engineering
23
2.5
System modes
2
1.5
1
0.5
0
2
4
6
8
10
12
10
12
t (s)
Figure 1: Switching signal.
0.3
0.2
0.1
0
x
−0.1
−0.2
−0.3
−0.4
0
2
4
6
8
t (s)
x1
x2
Figure 2: State trajectories of the closed-loop system.
derived. Then, a feedback control scheme consisting of an impulsive feedback controller and
a switching controller is proposed, and the proposed control strategy can guarantee that the
closed-loop system is finite-time bounded with H∞ disturbance attenuation level. Finally, the
results are illustrated by means of two numerical examples.
Acknowledgment
This work was supported by the National Natural Science Foundation of China under Grant
nos. 61074023, 60974027, and 61273120.
24
Mathematical Problems in Engineering
References
1 D. J. Leith, R. N. Shorten, W. E. Leithead, O. Mason, and P. Curran, “Issues in the design of
switched linear control systems: a benchmark study,” International Journal of Adaptive Control and
Signal Processing, vol. 17, no. 2, pp. 103–118, 2003.
2 D. Liberzon and A. S. Morse, “Basic problems in stability and design of switched systems,” IEEE
Control Systems Magazine, vol. 19, no. 5, pp. 59–70, 1999.
3 D. Liberzon, J. P. Hespanha, and A. S. Morse, “Stability of switched systems: a Lie-algebraic
condition,” Systems & Control Letters, vol. 37, no. 3, pp. 117–122, 1999.
4 H. Lin and P. J. Antsaklis, “Stability and stabilizability of switched linear systems: a survey of recent
results,” IEEE Transactions on Automatic Control, vol. 54, no. 2, pp. 308–322, 2009.
5 R. A. Decarlo, M. S. Branicky, S. Pettersson, and B. Lennartson, “Perspectives and results on the
stability and stabilizability of hybrid systems,” Proceedings of the IEEE, vol. 88, no. 7, pp. 1069–1082,
2000.
6 S. Kim, S. A. Campbell, and X. Liu, “Stability of a class of linear switching systems with time delay,”
IEEE Transactions on Circuits and Systems. I, vol. 53, no. 2, pp. 384–393, 2006.
7 D. Liberzon, Switching in Systems and Control, Birkhäuser, Boston, Mass, USA, 2003.
8 F. Blanchini and S. Miani, Set-theoretic Methods in Control, Birkhäuser, Boston, Mass, USA, 2008.
9 R. Yuan, Z. Jing, and L. Chen, “Uniform asymptotic stability of hybrid dynamical systems with delay,”
IEEE Transactions on Automatic Control, vol. 48, no. 2, pp. 344–348, 2003.
10 P. Colaneri, J. C. Geromel, and A. Astolfi, “Stabilization of continuous-time switched nonlinear
systems,” Systems & Control Letters, vol. 57, no. 1, pp. 95–103, 2008.
11 M. da la Sen, “Quadratic stability and stabilization of switched dynamic systems with uncommensurate internal point delays,” Applied Mathematics and Computation, vol. 185, no. 1, pp. 508–526, 2007.
12 O. M. Abou Al-Ola, K. Fujimoto, and T. Yoshinaga, “Common Lyapunov function based on KullbackLeibler divergence for a switched nonlinear system,” Mathematical Problems in Engineering, vol. 2011,
Article ID 723509, 12 pages, 2011.
13 M. de la Sen and A. Ibeas, “Stability results for switched linear systems with constant discrete delays,”
Mathematical Problems in Engineering, vol. 2008, Article ID 543145, 28 pages, 2008.
14 C. Gökçek, “Stability analysis of periodically switched linear systems using Floquet theory,”
Mathematical Problems in Engineering, vol. 2044, no. 1, pp. 1–10, 2004.
15 M. de la Sen, “Sufficiency-type stability and stabilization criteria for linear time-invariant systems
with constant point delays,” Lithuanian Mathmatical Journal, vol. 43, no. 3, pp. 235–256, 2003.
16 H. Dong, Z. Wang, D. W. C. Ho, and H. Gao, “Robust H∞ filtering for Markovian jump systems with
randomly occurring nonlinearities and sensor saturation: the finite-horizon case,” IEEE Transactions
on Signal Processing, vol. 59, no. 7, pp. 3048–3057, 2011.
17 H. Dong, Z. Wang, and H. Gao, “Observer-based H∞ control for systems with repeated scalar
nonlinearities and multiple packet losses,” International Journal of Robust and Nonlinear Control, vol.
20, no. 12, pp. 1363–1378, 2010.
18 H. Dong, Z. Wang, and H. Gao, “Robust H∞ filtering for a class of nonlinear networked systems
with multiple stochastic communication delays and packet dropouts,” IEEE Transactions on Signal
Processing, vol. 58, no. 4, pp. 1957–1966, 2010.
19 B. Shen, Z. Wang, and X. Liu, “Bounded H∞ synchronization and state estimation for discrete timevarying stochastic complex networks over a finite horizon,” IEEE Transactions on Neural Networks, vol.
22, no. 1, pp. 145–157, 2011.
20 B. Shen, Z. Wang, Y. S. Hung, and G. Chesi, “Distributed H∞ filtering for polynomial nonlinear
stochastic systems in sensor networks,” IEEE Transactions on Industrial Electronics, vol. 58, no. 5, pp.
1971–1979, 2011.
21 B. Shen, Z. Wang, and Y. S. Hung, “Distributed H∞ -consensus filtering in sensor networks with
multiple missing measurements: the finite-horizon case,” Automatica, vol. 46, no. 10, pp. 1682–1688,
2010.
22 Z. Xiang, Y.-N. Sun, and M. S. Mahmoud, “Robust finite-time H∞ control for a class of uncertain
switched neutral systems,” Communications in Nonlinear Science and Numerical Simulation, vol. 17, no.
4, pp. 1766–1778, 2012.
23 G. Zong, S. Xu, and Y. Wu, “Robust H∞ stabilization for uncertain switched impulsive control systems
with state delay: an LMI approach,” Nonlinear Analysis: Hybrid Systems, vol. 2, no. 4, pp. 1287–1300,
2008.
Mathematical Problems in Engineering
25
24 J. Liu, X. Liu, and W.-C. Xie, “Input-to-state stability of impulsive and switching hybrid systems with
time-delay,” Automatica, vol. 47, no. 5, pp. 899–908, 2011.
25 X. Liu, S. Zhong, and X. Ding, “Robust exponential stability of impulsive switched systems with
switching delays: a Razumikhin approach,” Communications in Nonlinear Science and Numerical
Simulation, vol. 17, no. 4, pp. 1805–1812, 2012.
26 P. Dorato, “Short time stability in linear time-varying systems,” in Proceedings of the IRE International
Convention Record Part 4, pp. 83–87, 1961.
27 F. Amato, M. Ariola, and P. Dorato, “Finite-time control of linear systems subject to parametric
uncertainties and disturbances,” Automatica, vol. 37, no. 9, pp. 1459–1463, 2001.
28 S. Zhao, J. Sun, and L. Liu, “Finite-time stability of linear time-varying singular systems with
impulsive effects,” International Journal of Control, vol. 81, no. 11, pp. 1824–1829, 2008.
29 E. Moulay and W. Perruquetti, “Finite time stability conditions for non-autonomous continuous
systems,” International Journal of Control, vol. 81, no. 5, pp. 797–803, 2008.
30 F. Amato, M. Ariola, and C. Cosentino, “Finite-time control of discrete-time linear systems: analysis
and design conditions,” Automatica, vol. 46, no. 5, pp. 919–924, 2010.
31 F. Amato, M. Ariola, and C. Cosentino, “Finite-time stability of linear time-varying systems: analysis
and controller design,” IEEE Transactions on Automatic Control, vol. 55, no. 4, pp. 1003–1008, 2010.
32 L. Weiss and E. F. Infante, “Finite time stability under perturbing forces and on product spaces,” IEEE
Transactions on Automatic Control, vol. 12, pp. 54–59, 1967.
33 L. Liu and J. Sun, “Finite-time stabilization of linear systems via impulsive control,” International
Journal of Control, vol. 81, no. 6, pp. 905–909, 2008.
34 F. Amato, R. Ambrosino, M. Ariola, and C. Cosentino, “Finite-time stability of linear time-varying
systems with jumps,” Automatica, vol. 45, no. 5, pp. 1354–1358, 2009.
35 R. Ambrosino, F. Calabrese, C. Cosentino, and G. De Tommasi, “Sufficient conditions for finite-time
stability of impulsive dynamical systems,” IEEE Transactions on Automatic Control, vol. 54, no. 4, pp.
861–865, 2009.
36 F. Amato, R. Ambrosino, C. Cosentino, and G. De Tommasi, “Finite-time stabilization of impulsive
dynamical linear systems,” Nonlinear Analysis: Hybrid Systems, vol. 5, no. 1, pp. 89–101, 2011.
37 H. Du, X. Lin, and S. Li, “Finite-time stability and stabilization of switched linear systems,” in
Proceedings of the 28th Chinese Control Conference (CCC ’09), pp. 1938–1943, December 2009.
38 W. Xiang and J. Xiao, “H∞ finite-time control for switched nonlinear discrete-time systems with normbounded disturbance,” Journal of the Franklin Institute, vol. 348, no. 2, pp. 331–352, 2011.
39 Z. Hualin and S. Hongfei, “The design of switching law of linear switched systems of finite-time
stability,” in Proceedings of the International Conference on Electrical and Control Engineering (ICECE ’10),
pp. 2318–2320, June 2010.
40 F. Amato, M. Ariola, C. T. Abdallah, and P. Dorato, “Finite-time control for uncertain linear systems
with disturbance inputs,” in Proceedings of the American Control Conference (ACC ’99), pp. 1776–1780,
June 1999.
41 C. Liu and Z. R. Xiang, “Robust H∞ finite-time stabilization of nonlinear impulsive switched system
with time-delays,” in Proceedings of the 24th Chinese Control and Decision Conference, pp. 264–269, 2012.
Advances in
Operations Research
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Advances in
Decision Sciences
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Mathematical Problems
in Engineering
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Journal of
Algebra
Hindawi Publishing Corporation
http://www.hindawi.com
Probability and Statistics
Volume 2014
The Scientific
World Journal
Hindawi Publishing Corporation
http://www.hindawi.com
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
International Journal of
Differential Equations
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Volume 2014
Submit your manuscripts at
http://www.hindawi.com
International Journal of
Advances in
Combinatorics
Hindawi Publishing Corporation
http://www.hindawi.com
Mathematical Physics
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Journal of
Complex Analysis
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
International
Journal of
Mathematics and
Mathematical
Sciences
Journal of
Hindawi Publishing Corporation
http://www.hindawi.com
Stochastic Analysis
Abstract and
Applied Analysis
Hindawi Publishing Corporation
http://www.hindawi.com
Hindawi Publishing Corporation
http://www.hindawi.com
International Journal of
Mathematics
Volume 2014
Volume 2014
Discrete Dynamics in
Nature and Society
Volume 2014
Volume 2014
Journal of
Journal of
Discrete Mathematics
Journal of
Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com
Applied Mathematics
Journal of
Function Spaces
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Optimization
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014