Research Article Convergence Analysis of EFOP Estimate Based on Frequency Domain Smoothing
advertisement

Hindawi Publishing Corporation
Journal of Applied Mathematics
Volume 2013, Article ID 781856, 8 pages
http://dx.doi.org/10.1155/2013/781856
Research Article
Convergence Analysis of EFOP Estimate Based on
Frequency Domain Smoothing
Yulai Zhang, Kueiming Lo, and Yang Su
School of Software, Tsinghua University, Tsinghua National Laboratory for Information Science and Technology, Beijing 100084, China
Correspondence should be addressed to Yulai Zhang; zhangyl08@mails.tsinghua.edu.cn
Received 8 March 2013; Revised 21 April 2013; Accepted 24 April 2013
Academic Editor: Graziano Chesi
Copyright © 2013 Yulai Zhang et al. This is an open access article distributed under the Creative Commons Attribution License,
which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
The classic methods for frequency domain transfer function estimation such as the Empirical Transfer Function Estimate (ETFE)
and cross spectral method do not work well when the noise signal is complex. Combines the time domain and frequency domain
methods the Empirical Frequency-domain Optimal Parameter (EFOP) Estimate was presented. It could improve the precision
of system’s transfer function estimation and identification efficiency. The convergence of the EFOP based on frequency domain
smoothing is investigated in this paper. The transfer function is weighted by a frequency window and the GPE criterion is extended
to the integral form. Convergence rate and consistent properties for the EFOP estimate are given. Finally, some simulation results
are included to illustrate the advantage of the EFOP based smoothing method.
1. Introduction
Parametric and nonparametric estimations in system identification or signal processing are both of great importance.
Most of these algorithms use input and output data to give
a modeling of the target system. The modeling of linear
system transfer function is a non-parameter method, and it is
one of the most important basic problems in control theory.
From the beginning of modern system identification and signal processing, many nonparametric methods in frequency
domain have been proposed, such as ETFE [1], power spectrum estimation [2], and so on. Frequency domain window
functions [3, 4] are used in power spectrum estimation. In the
past few decades, algorithms for window function selection
are developed, such as adaptive smoothing method in [5]
and least square estimation for frequency function in [6].
Discussion of the relationship between time domain methods
and frequency domain methods can be found in [7]. EFOP [8,
9] is an algorithm combines the time domain and frequency
domain. A new criterion named General Prediction Error
(GPE) is proposed and implemented in EFOP. This algorithm
obtains the global optimal transfer function in frequency
domain by minimizing the GPE criterion. The advantage of
this kind of algorithm includes a faster rate of convergence
as well as better identification qualities. The algorithms given
in [8, 9] are parametric in time domain, so they cannot
be directly used in the identification of transfer function in
frequency domain. Since frequency domain methods have
their own advantages such as robustness for outliers in data
[10], it is necessary to develop frequency domain methods.
In this article we analysis the convergence of transfer
function estimation based on EFOP and frequency domain
window function smoothing technic. Firstly, the identification of transfer function is derived with GPE criterion in
EFOP; secondly, the spectrum analysis is used to calculated
the predict error and a window function to smoothing the
transfer function in frequency domain. The consistence and
convergence properties of this procedure are analyzed in
this paper. It is proofed that this new smoothing method is
asymptotically unbiased and the rate of convergence is fast.
Simulations in the end show that the method proposed in
this paper gives better results than the ETFE on identification
accuracy under large noises.
For the rest of this article, preliminaries including EFOP
and GPE are introduced in Section 2; the frequency domain
smoothing procedure is derived in Section 3; its rate of
convergence and estimator’s bias properties are analyzed
in Section 4; simulation results are given in Section 5 and
Section 6 is the conclusions.
2
Journal of Applied Mathematics
The contributions of this article include the following.
(i) Extending the GPE criterion in EFOP to its integral
form.
(ii) Development of EFOP smoothing method for transfer function estimation.
(iii) The rate of convergence for this new method is
proved.
Lemma 3. Provided that 𝐷 = {(𝑎1 , 𝑎2 , . . . , 𝑎𝑁) | ∑𝑁
𝑘=1 𝑎𝑘 =
𝑀, 𝑎𝑘 ≥ 0}, 𝑀 is a constant, {𝜉𝑘 }𝑁
is
stochastic
i.d.d
white
noise
1
2
𝑎
𝜉
,
𝐸𝜉
reaches
its
minimum
and 𝐸𝜉𝑘2 = 𝜆 𝑘 . Let 𝜉 = ∑𝑁
𝑡=1 𝑘 𝑘
−1
value when the coefficient satisfies 𝑎𝑘 = 𝑀(𝜆 𝑘 ∑𝑁
𝑘=1 (1/𝜆 𝑘 )) .
This lemma can be simply obtained by using Lagrange
method.
Denote 𝑢(𝑡) as an input data sequence, and 𝑦(𝑡) as an
output one. A black box linear model can be expressed as
𝐴 (𝑞) 𝑦 (𝑡) = 𝐵 (𝑞) 𝑢 (𝑡) +
2. Preliminaries
𝑛
Most input and output signals for system identification
procedures are sampled from application systems in industry
or laboratory. Denote 𝑥(𝑡)𝑁
1 as a data sequence, where 𝑁
is the total number of samples that is, the length of the
data sequence. The Discrete Fourier Transformation (DFT)
of 𝑥(𝑡)𝑁
1 is
𝑋𝑁 (𝑘) =
1 𝑁
=
∑𝑥 (𝑡) 𝜔−𝑡𝑘 ,
√𝑁 𝑡=1
DFT{𝑥 (𝑡)}𝑁
1
(1)
𝑘 = 1, 2, 3, . . . , 𝑁,
where 𝜔 = exp(2𝑖𝜋/𝑁). The Inverse Discrete Fourier
Transformation (IDFT) can also be denoted as:
𝑁
1
=
∑𝑋 (𝑘) 𝜔𝑡𝑘 ,
√𝑁 𝑡=1 𝑁
𝑡 = 1, 2, 3, . . . , 𝑁.
(2)
{𝑧(𝑡)}𝑁
1−𝑁
1 𝑁
∑𝑥 (𝑡) 𝑧 (𝑙 − 𝑡) ,
√𝑁 𝑙=1
𝑁
2
∑|𝑥 (𝑡)|2 = ∑ 𝑋𝑁 (𝑘) .
𝑡=1
(4)
𝑘=1
DFT{(𝑥 ∗ 𝑧) (𝑡)}𝑁
1 = 𝑋𝑁 (𝑘) 𝑍𝑁 (𝑘) ,
where 𝑋𝑁(𝑘) =
(7)
where 𝐺(𝑞, 𝜃) = 𝐵(𝑞)/𝐴(𝑞), 𝐻(𝑞, 𝜃) = 𝐶(𝑞)/𝐴(𝑞)𝐷(𝑞).
Denote 𝑦(𝑡 | 𝜃) as the predictor of output 𝑦(𝑡):
𝑦 (𝑡 | 𝜃) = 𝐻−1 (𝑞, 𝜃) 𝐺 (𝑞, 𝜃) 𝑢 (𝑡) + (1 − 𝐻−1 (𝑞, 𝜃)) 𝑦 (𝑡)
(8)
𝜃 is the parameter of the black box model here, and 𝜀(𝑡, 𝜃) =
𝑦(𝑡) − 𝑦(𝑡 | 𝜃) = 𝐻−1 (𝑞, 𝜃)(𝑦(𝑡) − 𝐺(𝑞, 𝜃)𝑢(𝑡)) is the predict
error, which can also be written as
𝜀 (𝑡, 𝜃) =
𝐴 (𝑞) 𝐷 (𝑞)
𝐵 (𝑞) 𝐷 (𝑞)
𝑦 (𝑡) −
𝑢 (𝑡) .
𝐶 (𝑞)
𝐶 (𝑞)
𝑍𝑁(𝑘) =
𝛽 (𝑁, 𝜃) = (𝜀 (1, 𝜃) , 𝜀 (2, 𝜃) , . . . , 𝜀 (𝑁, 𝜃))𝑇 .
(9)
DFT{𝑧(𝑡)}𝑁
1 .
(10)
Define a criterion function
1 𝑁
∑ 𝐿 (𝜀 (𝑡, 𝜃) , 𝜃, 𝑡) .
𝑁 𝑘=1
(11)
The estimation of the model under this criterion can be
presented as
𝜃̂𝑁 = arg min 𝐽 (𝛽 (𝑡, 𝜃) ; 𝑁; 𝜃) .
𝜃
(12)
First we denote that the transfer function obtained by
̂NETFE (𝜔𝑘 ), and the error of this estimation is
ETFE is 𝐺
calculated as
̂NETFE (𝜔𝑘 ) − 𝐺𝑁 (𝜔𝑘 ) , 𝑘 = 1, 2, 3, . . . , 𝑁.
𝛿𝑁 (𝑘, 𝜃) = 𝐺
(13)
Lemma 4. Provided that the variance of 𝑒0 (𝑡) in (7) is 𝜆 and
it is a white noise, thus one obtains
𝐸𝛿𝑁 (𝑘, 𝜃) = 0,
Lemma 2. For periodic signal {𝑧(𝑡)}𝑁
1−𝑁 , 𝑧(𝑡) = 𝑧(𝑡 + 𝑁), 1 −
𝑁 ≤ 𝑡 ≤ 0, we can obtain:
DFT{𝑥(𝑡)}𝑁
1 ,
𝑦 (𝑡) = 𝐺 (𝑞, 𝜃) 𝑢 (𝑡) + 𝐻 (𝑞, 𝜃) 𝑒0 (𝑡) ,
𝑡 = 1, 2, 3, . . . , 𝑁. (3)
Lemma 1 (Parse Val equation). Provided that 𝑋𝑁(𝑘) =
𝑁
−𝑡𝑘
√
, 𝑘 = 1, 2, 3, . . . , 𝑁, that
DFT{𝑥(𝑡)}𝑁
1 = 1/ 𝑁 ∑𝑡=1 𝑥(𝑡)𝜔
is, 𝑥(𝑡) and 𝑋(𝑘) are DFT pairs. One can obtain
𝑁
𝑛
𝑎
𝑏
𝑎𝑘 𝑞−𝑘 , 𝐵(𝑞) = ∑𝑘=1
𝑏𝑘 𝑞−𝑘 , 𝐶(𝑞) =
where 𝐴(𝑞) = 1 + ∑𝑘=1
𝑛𝑐
𝑛
𝑑
1 + ∑𝑘=1 𝑐𝑘 𝑞−𝑘 , and 𝐷(𝑞) = 1 + ∑𝑘=1
𝑑𝑘 𝑞−𝑘 .
Rewrite this equation as
𝐽=
Provided that
and
are signal sequence with
same length, the convolution of then can be written as
(𝑥 ∗ 𝑧) (𝑡) =
(6)
The predict error vector can be presented as
𝑁
𝑥 (𝑘) = IDFT{𝑋𝑁 (𝑘)}1
{𝑥(𝑡)}𝑁
1
𝐶 (𝑞)
𝑒 (𝑡) ,
𝐷 (𝑞) 0
𝑘 = 1, 2, 3, . . . , 𝑁,
𝐸𝛿𝑁 (𝑘, 𝜃) 𝛿𝑁(𝑙, 𝜃)
2
𝐶𝜔𝑘
{
{𝜆
= { 𝐴𝜔𝑘 𝐷𝜔𝑘 𝑈𝑁 (𝑘)
{
{0
(5)
where 𝑈𝑁(𝑘) =
DFT{𝑢(𝑡)}𝑁
1 .
(14)
for 𝑘 = 𝑙,
for 𝑘 ≠ 𝑙,
Journal of Applied Mathematics
3
Corollary 5. Under the assumption of Lemma 4, one can
obtain the following equation:
−1
𝜃̂ = (Φ𝑇 (𝑁) 𝑄 (𝑁) Φ (𝑁)) Φ𝑇 (𝑁) 𝑄 (𝑁) 𝑌 (𝑁) ,
𝑁
2
arg min 𝐸∑𝑔𝑘 𝛿𝑁 (𝑘, 𝜃)
𝑡=1
Ω
(21)
𝑇
where 𝑄(𝑁) = (1/𝑁) ∑𝑁
𝑡=1 𝜓(𝑡, 𝜃)𝜓 (𝑡, 𝜃) and Φ(𝑁) is
composed of regression vectors
𝑁
2
= arg min 𝐸∑𝑔𝑘2 𝛿𝑁 (𝑘, 𝜃)
Ω
𝛽𝑇 (𝑁, 𝜃)𝑄(𝑁, 𝜃)𝛽(𝑁, 𝜃), which is the GPE criterion [8]
(15)
𝑇
Φ (𝑁) = (𝜙 (1) , 𝜙 (2) , . . . , 𝜙 (𝑁))
𝑡=1
∗
= (𝑔1∗ , 𝑔2∗ , . . . 𝑔𝑁
),
(22)
and 𝜙(𝑘) = (−𝑦(𝑘−1), −𝑦(𝑘−2), . . . , −𝑦(𝑘−𝑛𝑎 ), 𝑢(𝑘−1), 𝑢(𝑘−
2), . . . , 𝑢(𝑘 − 𝑛𝑏 )).
where
2
𝐴 (𝜔𝑘 ) 𝐷 (𝜔𝑘 ) 𝑈𝑁 (𝑘)
.
𝑔𝑘∗ =
𝐶 (𝜔𝑘 )
(16)
3.1. Representing Criterion in Frequency Domain. Rewrite
𝑉𝑁(𝜃, 𝑍𝑁) in frequency domain as
This can be derived from Lemma 3. We substitute the
constant 𝑀 in Lemma 3 by
𝑀=
2
𝑁 𝐴 (𝜔𝑙 ) 𝐷 (𝜔𝑙 ) 𝑈 (𝑙)
𝑁
∑
𝐶 (𝜔𝑙 )
𝑙=1
3. New Method Based on EFOP and Frequency
Domain Smoothing
𝑁
2
𝑉𝑁 (𝜃, 𝑍𝑁) = arg min 𝐸∑𝑔𝑘 𝛿𝑁 (𝑘, 𝜃)
𝑡=1
= 𝛽𝑇 (𝑁, 𝜃) 𝑄 (𝑁, 𝜃) 𝛽 (𝑁, 𝜃)
(17)
𝑁
4
𝑈 (𝑠)
2
= ∑ 𝑁 𝑠 𝛿𝑁 (𝑠, 𝜃)
𝐻
)
(𝜔
𝑠=1
in an off-line procedure, so 𝑀 can be taken as a constant.
𝑁
4
𝑈 (𝑠) ̂
𝑠
𝑠 2
= ∑ 𝑁 𝑠 𝐺
𝑁 (𝜔 ) − 𝐺𝑁 (𝜔 )
𝐻
(𝜔
)
𝑠=1
Theorem 6. Consider
2
𝑁
arg min 𝐸∑𝑔𝑘 𝛿𝑁 (𝑘, 𝜃)
𝑡=1
Ω
𝑁
̂
2
2𝜋𝑖𝑘/𝑁
= ∑𝐺
) − 𝐺𝑁 (𝑒2𝜋𝑖𝑘/𝑁, 𝜃)
NETFE (𝑒
(18)
𝑠=1
= 𝛽𝑇 (𝑁, 𝜃) 𝑄 (𝑁, 𝜃) 𝛽 (𝑁, 𝜃) ,
× 𝑄𝑁 (
𝑇
where 𝑄(𝑁, 𝜃) = (1/𝑁) ∑𝑁
𝑠=1 𝜓(𝑠, 𝜃)𝜓 (𝑠, 𝜃) which is the
weight matrix, and
𝑇
𝜓 (𝑠, 𝜃) = (V𝑒 (𝑠 − 1, 𝜃) , V𝑒 (𝑠 − 2, 𝜃) , . . . , V𝑒 (𝑠 − 𝑁, 𝜃)) ,
𝑠 = 1, 2, 3, . . . , 𝑁,
V (𝑡, 𝜃) ,
V𝑒 (𝑡, 𝜃) = {
V (𝑡 + 𝑁, 𝜃) ,
(23)
where 𝑄𝑁(𝜔, 𝜃) = |𝑈𝑁(𝜔)/𝐻(𝑒𝑖𝜔 , 𝜃)|4 . Since the frequency
domain transfer function is actually a continuous function,
the integrity form can be presented as
𝑉𝑁 (𝜃, 𝑍𝑁)
if 1 ≤ 𝑡 ≤ 𝑁
if 1 − 𝑁 ≤ 𝑡 ≤ 0.
(19)
Signal {V(𝑡, 𝜃)}𝑁
1 is introduced by
𝐶 (𝑞) V (𝑡, 𝜃) = 𝐴 (𝑞) 𝐷 (𝑞) 𝑢 (𝑡) .
2𝜋𝑖𝑘
, 𝜃) ,
𝑁
(20)
The proof can be completed by using Corollary 5 and
Lemma 1 in this section, and it is similar to the proof in [11].
More details of EFOP and GPE can be can be
found in [11]. EFOP gets the estimator by minimizing
≈
1 𝜋 ̂
2
∫ 𝐺NETFE (𝑒𝑖𝜔 , 𝜃) − 𝐺𝑁 (𝑒𝑖𝜔 , 𝜃) 𝑄𝑁 (𝜔, 𝜃) 𝑑𝜔.
2𝜋 −𝜋
(24)
3.2. Algorithm with Frequency Domain Window. Denote
𝑊𝛾 (𝜔) as the window function. Window function can be
seen as a way to perform weighting in frequency domain.
If the width of the window function is relatively large, the
variance of 𝐺𝑁(𝑒𝑖𝜔 , 𝜃) will be small. But a wider frequency
window will make the bias of 𝐺𝑁(𝑒𝑖𝜔 , 𝜃) larger. So there is
a tradeoff between the variance and bias of the estimated
transfer function. A scalar 𝛾 is introduced to adjust this
4
Journal of Applied Mathematics
tradeoff. A smaller 𝛾 represents a wider window function.
Some of the 𝑊𝛾 (𝜔) s properties are written as follows:
𝜋
∫ 𝑊𝛾 (𝜉) 𝑑𝜉 = 1;
−𝜋
𝜋
∫ 𝜉2 𝑊𝛾 (𝜉) 𝑑𝜉 = 𝑀 (𝛾) ;
−𝜋
𝜋
where 𝑊𝛾 (𝜔) is the frequency domain window function and
𝐺NETFE (𝑒𝑖𝜔 , 𝜃) is the estimated ETFE transfer function.
Proof. Rewrite 𝐺(𝑒𝑖𝜔 , 𝜃) as
∫ 𝜉𝑊𝛾 (𝜉) 𝑑𝜉 = 0;
−𝜋
𝜋
∫ 𝑊𝛾2 (𝜉) 𝑑𝜉 =
−𝜋
1
𝑊 (𝛾) .
2𝜋
(25)
𝜋
̂NETFE (𝑒𝑖𝜔 , 𝜃) −
Theorem 7. If 𝜃̂𝑁 = arg min𝜃,𝜂 ∫−𝜋 (|𝐺
𝑖𝜔
2
4
𝑖𝜔
4
𝐺(𝑒 , 𝜃)| |𝑈𝑁(𝜔)| /|𝐻(𝑒 , 𝜂)| )𝑑𝜔, the systems transfer function can be estimated as
𝑁
𝐺 (𝑒𝑖𝜔 , 𝜃) = ∑ (𝑔𝑘𝑅 + 𝑖𝑔𝑘𝐼 ) 𝑊𝛾 (𝜔 − 𝜔𝑘 ) ,
𝑘=1
𝜃𝑘 =
(27)
𝑇
[𝑔1𝑅 , 𝑔1𝐼 , . . . 𝑔𝑛𝑅 , 𝑔𝑛𝐼 ]
𝑖𝜔𝑘
𝐺NEFOP (𝑒 )
=
𝜋
4 ̂
𝑖𝜔
∫−𝜋 𝑊𝛾 (𝜔 − 𝜔𝑘 ) 𝑈𝑁 (𝜔) 𝐺
NETFE (𝑒 , 𝜃) 𝑑𝜔
,
𝜋
4
∫−𝜋 𝑊𝛾 (𝜔 − 𝜔𝑘 ) 𝑈𝑁 (𝜔) 𝑑𝜔
(26)
𝑔𝑘𝑅 and 𝑔𝑘𝐼 are the real and imaginary parts of 𝜃𝑘 , respectively.
̂
2
4
𝑖𝜔
𝑖𝜔
𝜕 𝜋 𝐺
NETFE (𝑒 , 𝜃) − 𝐺 (𝑒 , 𝜃) 𝑈𝑁 (𝜔)
𝑑𝜔
∫
4
𝜕𝜃𝑘 −𝜋
𝐻 (𝑒𝑖𝜔 , 𝜂)
̂
2
4
𝑁
𝑖𝜔
𝑅
𝐼
𝜕 𝜋 𝐺
NETFE (𝑒 , 𝜃) − ∑𝑘=1 (𝑔𝑘 + 𝑖𝑔𝑘 ) 𝑊𝛾 (𝜔 − 𝜔𝑘 ) 𝑈𝑁 (𝜔)
=
𝑑𝜔
∫
4
𝜕𝜃𝑘 −𝜋
𝐻 (𝑒𝑖𝜔 , 𝜂)
(28)
̂NETFE (𝑒𝑖𝜔 , 𝜃) − 𝐺 (𝑒𝑖𝜔 , 𝜃)) 𝑊𝛾 (𝜔 − 𝜔𝑘 ) 𝑈𝑁 (𝜔)4
(𝐺
𝑑𝜔 = 0.
= −2 ∫
4
𝑖𝜔
−𝜋
𝐻 (𝑒 , 𝜂)
𝜋
Since 𝐺(𝑒𝑖𝜔 , 𝜂)𝑊𝛾 (𝜔 − 𝜔𝑘 ) ≈ 𝐺(𝑒𝑖𝜔𝑘 , 𝜂)𝑊𝛾 (𝜔 − 𝜔𝑘 ), so we have
4.1. Consistency and Bias. From the expression of 𝐺(𝑒𝑖𝜔𝑘 ), we
can obtain:
𝐺NEFOP (𝑒𝑖𝜔𝑘 )
4 ̂
𝑖𝜔
∫−𝜋 𝑊𝛾 (𝜔 − 𝜔𝑘 ) 𝑈𝑁 (𝜔) 𝐺
NETFE (𝑒 , 𝜃) 𝑑𝜔
=
.
𝜋
4
∫−𝜋 𝑊𝛾 (𝜔 − 𝜔𝑘 ) 𝑈𝑁 (𝜔) 𝑑𝜔
𝜋
(29)
The new algorithm is obtained by Theorem 7. Figure 1 is
the explanation of algorithm procedure. In Figure 1, 𝐺𝑁 and
𝐺𝐷 are the numerator and denominator of the final result,
respectively.
Elementary operations such as add and division are not
explicitly shown in the chart.
4. Consistency and Convergence Analysis
The theoretical analysis of consistency and convergence for
the proposed method are investigated in this section. It is
proved that the estimation result is asymptotically unbiased
and will converge to the true system transfer function.
̂NEFOP (𝑒𝑖𝜔0 )
𝐸𝐺
=
𝜋
2
∫−𝜋 𝑊𝛾 (𝜉 − 𝜔0 ) Φ𝑢 (𝜉)
𝜋
2
∫−𝜋 𝑊𝛾 (𝜉 − 𝜔0 ) Φ𝑢 (𝜉) 𝑑𝜉
[𝐺0 (𝑒𝑖𝜉 ) + 𝜌1 (𝑁) /𝑈𝑁 (𝜉)] 𝑑𝜉
× 𝜋
2
∫−𝜋 𝑊𝛾 (𝜉 − 𝜔0 ) Φ𝑢 (𝜉) 𝑑𝜉
(30)
𝜋
2
∫−𝜋 𝑊𝛾 (𝜉 − 𝜔0 ) Φ𝑢 (𝜉) 𝐺0 (𝑒𝑖𝜉 ) 𝑑𝜉
≈
,
𝜋
2
∫−𝜋 𝑊𝛾 (𝜉 − 𝜔0 ) Φ𝑢 (𝜉) 𝑑𝜉
where 𝜌1 (𝑁) is defined as
̂NEFOP (𝑒𝑖𝜔 ) = 𝐺0 (𝑒𝑖𝜔 ) +
𝐸𝐺
𝜌1 (𝑁)
𝑈𝑁 (𝜔)
(31)
Journal of Applied Mathematics
5
̂𝑁(𝑒𝑖𝜔0 ) as:
We can obtain the numerator of 𝐸𝐺
𝑢(𝑡)
𝑦(𝑡)
𝐺0 (𝑒𝑖𝜔0 ) Φ2𝑢 (𝜔0 )
FFT
FFT
𝑌𝑁 (𝑘)
𝑈𝑁 (𝑘)
+ 𝑀 (𝛾) [𝐺0 (𝑒𝑖𝜔0 ) Φ𝑢 (𝜔0 ) Φ𝑢 (𝜔0 )
+ 𝐺0 (𝑒𝑖𝜔0 ) Φ𝑢 (𝜔0 ) Φ𝑢 (𝜔0 )
+
𝑖𝜔0
(𝑒
) Φ𝑢 (𝜔0 ) Φ𝑢
(34)
(𝜔0 )
1
+ Φ2𝑢 (𝜔0 ) 𝐺0 (𝑒𝑖𝜔0 )] .
2
|𝑈𝑁 (𝑘)|4
𝐺𝑁ETFE (𝑒𝑗𝜔𝑘 )
2𝐺0
̂𝑁(𝑒𝑖𝜔0 ) as:
And the denominator of 𝐸𝐺
Window
function
GN (𝑒𝑗𝜔𝑘 )
GD (𝑒𝑗𝜔𝑘 )
For sake of convenience, we denote 𝐺0 (𝑒𝑖𝜔0 )Φ𝑢 (𝜔0 )Φ𝑢 (𝜔0 ) +
(1/2)Φ2𝑢 (𝜔0 )𝐺0 (𝑒𝑖𝜔0 ) − 𝐺0 (𝑒𝑖𝜔0 )Φ𝑢 (𝜔0 )Φ𝑢 (𝜔0 ) as Ω and
Φ𝑢 (𝜔0 )Φ𝑢 (𝜔0 ) + Φ𝑢 (𝜔0 )Φ𝑢 (𝜔0 ) as Υ. So the equation can be
rewritten as:
𝐺𝑁EFOP (𝑒𝑗𝜔𝑘 )
Figure 1: Algorithm procedure.
̂NEFOP (𝑒𝑖𝜔0 ) =
𝐸𝐺
|𝜌1 (𝑁)| ≤ 𝐶1 /√𝑁 and 𝐶1 = (2 ∑∞
𝑘=1 |𝑘𝑔0 (𝑘)|) ⋅ max |𝑢(𝑡)|.
Given the Taylor expansion:
𝑖𝜉
𝑖𝜔0
𝐺0 (𝑒 ) ≈ 𝐺0 (𝑒 ) + (𝜉 −
𝜔0 ) 𝐺0
Φ2𝑢 (𝜔0 ) + 2𝑀 (𝛾) [Φ𝑢 (𝜔0 ) Φ𝑢 (𝜔0 ) + Φ𝑢 (𝜔0 ) Φ𝑢 (𝜔0 )] .
(35)
Φ2𝑢 (𝜔0 ) + 𝑀 (𝛾) Υ
.
(36)
From the above equation, we can easily get that when 𝛾 →
∞ and 𝑀(𝛾) → 0:
̂NEFOP (𝑒𝑖𝜔0 ) ≈ 𝐺0 (𝑒𝑖𝜔0 ) .
𝐸𝐺
(37)
Based on the property of the window function, we can obtain
the following inequality:
𝑖𝜔0
(𝑒 )
1
2
+ (𝜉 − 𝜔0 ) 𝐺0 (𝑒𝑖𝜔0 ) ,
2
̂NEFOP (𝑒𝑖𝜔0 ) − 𝐺0 (𝑒𝑖𝜔0 )
𝐸𝐺
Φ20 (𝜉) ≈ Φ2𝑢 (𝜔0 ) + 2 (𝜉 − 𝜔0 ) Φ𝑢 (𝜔0 ) Φ𝑢 (𝜔0 )
(32)
< 𝑀 (𝛾) [2𝐺0 (𝑒𝑖𝜔0 )
2
+ (𝜉 − 𝜔0 ) [Φ𝑢 (𝜔0 ) Φ𝑢 (𝜔0 )
+Φ𝑢 (𝜔0 ) Φ𝑢
𝐺0 (𝑒𝑖𝜔0 ) Φ2𝑢 (𝜔0 ) + 𝑀 (𝛾) Ω
(𝜔0 )] .
Note that the window function 𝑊𝛾 should satisfy the following equations:
Φ𝑢 (𝜔0 ) 1 𝑖𝜔0
+ 𝐺 (𝑒 )]
Φ𝑢 (𝜔0 ) 2 0
+ 𝑂(𝐶3 (𝛾)) + 𝑂(
𝛾→∞
(38)
1
).
√𝑁
𝑁→∞
When the first-order and second-order derivatives of the
̂NEFOP (𝑒𝑖𝜔0 ) is
transfer function are bounded, the estimator 𝐺
asymptotically unbiased.
4.2. Variance Analysis and Rate of Convergence. From the
results of previous sections, we have:
𝜋
∫ 𝑊𝛾 (𝜉) 𝑑𝜉 = 1;
−𝜋
𝜋
∫ 𝜉2 𝑊𝛾 (𝜉) 𝑑𝜉 = 𝑀 (𝛾) ;
−𝜋
𝜋
∫ 𝜉𝑊𝛾 (𝜉) 𝑑𝜉 = 0;
−𝜋
𝜋
3
∫ 𝜉 𝑊𝛾 (𝜉) 𝑑𝜉 = 𝐶3 (𝛾) ;
−𝜋
(33)
̂NEFOP (𝑒𝑖𝜔0 )
̂NEFOP (𝑒𝑖𝜔0 ) − 𝐸𝐺
𝐺
𝜋
4
∫−𝜋 𝑊𝛾 (𝜉 − 𝜔0 ) 𝑈𝑁 (𝜉) (𝑉𝑁 (𝜉) /𝑈𝑁 (𝜉)) 𝑑𝜉 (39)
≈
.
𝜋
4
∫−𝜋 𝑊𝛾 (𝜉 − 𝜔0 ) 𝑈𝑁 (𝜉) 𝑑𝜉
6
Journal of Applied Mathematics
The nominator of (39) can be written as
Amplitude
25
𝜋
2
∫ 𝑊𝛾 (𝜉 − 𝜔0 ) 𝑈𝑁 (𝜉) 𝑈𝑁 (𝜉) 𝑉𝑁 (𝜉) 𝑑𝜉
−𝜋
20
15
10
5
𝑁/2
2𝜋
2𝜋𝑘
≈
− 𝜔0 )
∑ 𝑊 (
𝑁 𝑘=−(𝑁/2)+1 𝛾 𝑁
0
0
2𝜋𝑘
) ≜ 𝐴 𝑁,
𝑁
3
2.5
3
Phase (rad)
−1
−2
−3
−4
2𝜋𝑙
2𝜋𝑘
2𝜋𝑙
) 𝐸𝑉𝑁 (
) 𝑉𝑁 (−
)
𝑁
𝑁
𝑁
2
2𝜋𝑘
2𝜋𝑘 4
4𝜋2
𝑈
[𝑊
(
)]
(
−
𝜔
𝛾
0
𝑁 𝑁 )
𝑁2
𝑁
0
0.5
1
1.5
2
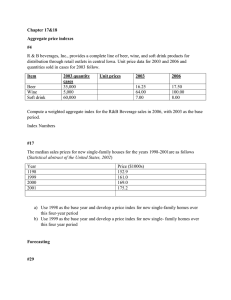
Frequency (rad/s)
True transfer function
EFOP smoothing
ETFE smoothing
(b)
Figure 2: Results of EFOP smoothing and ETFE smoothing for
system in (43) under 𝜎𝑒2 = 0.5. ErrorEFOP = 10.21; ErrorETFE =
23.35.
2𝜋𝑘
× [ΦV (
) + 𝜌2 (𝑁)]
𝑁
≈
2.5
(a)
2𝜋𝑙 2
2𝜋𝑘
× 𝑈𝑁 (−
) 𝑈 (
)
𝑁 𝑁 𝑁
=
2
0
4𝜋2
2𝜋𝑘
2𝜋𝑘 2
− 𝜔0 ) 𝑈𝑁 (
)
∑∑𝑊𝛾 (
2
𝑁 𝑘 𝑙
𝑁
𝑁
× 𝑈𝑁 (−
1.5
True transfer function
EFOP smoothing
ETFE smoothing
𝐸𝐴 𝑁𝐴 𝑁
=
1
Frequency (rad/s)
2𝜋𝑘 2
2𝜋𝑘
× 𝑈𝑁 (
) 𝑈𝑁 (
)
𝑁
𝑁
× 𝑉𝑁 (
0.5
2
2𝜋𝑘
2𝜋𝑘 4
2𝜋𝑘
4𝜋2
𝑈
[𝑊
(
)]
(
−
𝜔
𝛾
0
𝑁 𝑁 ) ΦV ( 𝑁 ) ,
𝑁2
𝑁
(40)
5. Simulations
In this section, we use the target system
where 𝜌2 (𝑁) ≤ 2𝐶/𝑁. Rewrite it in the integral form
𝐸𝐴 𝑁𝐴 𝑁 ≈
≈
2𝜋 𝜋 2
∫ 𝑊 (𝜉 − 𝜔0 ) Φ2𝑢 (𝜉) ΦV (𝜉) 𝑑𝜉
𝑁 −𝜋 𝛾
1
𝑊 (𝛾) Φ2𝑢 (𝜔0 ) ΦV (𝜔0 ) .
𝑁
𝑦 (𝑡) − 0.2𝑦 (𝑡 − 1) + 0.4𝑦 (𝑡 − 2)
= 9𝑢 (𝑡 − 1) + 2𝑢 (𝑡 − 2) + 𝑒 (𝑡)
(41)
And the denominator part can be written approximately as
𝜋
Φ2𝑢 (𝜔0 ). Notice ∫−𝜋 𝑊𝛾2 (𝜉)𝑑𝜉 = (1/2𝜋)𝑊(𝛾), so we have the
variance of the estimator
𝑊 (𝛾)
(1/𝑁) 𝑊 (𝛾) ΦV (𝜔0 )
+𝑜 (
)
2
𝑁
Φ𝑢 (𝜔0 )
𝛾→∞
𝑁 → ∞,𝛾/𝑁 → 0
≈
(1/𝑁) 𝑊 (𝛾) ΦV (𝜔0 )
.
Φ2𝑢 (𝜔0 )
{𝑢(𝑡)} is a white Pseudo-Random Binary Sequence (PRBS)
[12] noise with unit variance 𝜎𝑢2 = 1. And 𝑒(𝑡) is a gaussian
white noise with variance 𝜎𝑒2 .
We compared EFOP smoothing with ETFE smoothing
and cross-spectral method. In all simulations, a Hamming
window of length 2 is used for all methods:
𝑤 (𝑛) = 0.54 − 0.46 cos (2𝜋
𝑛
).
𝑁
(44)
And the estimation errors are calculated by the following
equation:
̂NEFOP (𝑒𝑖𝜔0 )]
Var [𝐺
=
(43)
𝑁
(42)
1/2
2
̂
error = ( ∑ 𝐺
(𝑘) − 𝐺0 (𝑘) )
,
(45)
𝑘=1
where 𝐺0 is the sample sequence of true transfer function
̂ is the estimation result with same
with 𝑁 = 128. And 𝐺
length.
Journal of Applied Mathematics
7
Table 1: Estimation error for 3 methods under different noise variances.
Noise variance
Estimate error of ETFE smoothing
Estimate error of cross-spectral method
Estimate error of EFOP smoothing
0.1
23.34
12.23
9.88
0.4
25.62
13.43
10.68
0.7
27.14
16.83
13.14
1.3
38.27
21.56
16.67
1.9
66.48
29.89
24.79
20
15
10
5
0
0
0.5
1
1.5
2
2.5
15
10
5
3
0
0.5
1
Frequency (rad/s)
True transfer function
EFOP smoothing
ETFE smoothing
−1
−1
Phase (rad)
0
−2
−3
0
0.5
1
1.5
2
Frequency (rad/s)
2.5
3
2.5
3
(a)
0
−4
1.5
2
Frequency (rad/s)
True transfer function
EFOP smoothing
Cross spectrum method
(a)
Phase (rad)
1.6
41.31
25.87
20.86
20
Amplitude
Amplitude
25
1.0
32.86
17.32
13.96
2.5
3
True transfer function
EFOP smoothing
ETFE smoothing
−2
−3
−4
0
0.5
1
1.5
2
Frequency (rad/s)
True transfer function
EFOP smoothing
Cross spectrum method
(b)
(b)
Figure 3: Results of EFOP smoothing and ETFE smoothing for
system in (43) under 𝜎𝑒2 = 1.5. ErrorEFOP = 29.07; ErrorETFE =
42.80.
Figure 4: Results of EFOP smoothing and cross-spectral
method for system in (43) under 𝜎𝑒2 = 0.5. ErrorEFOP =
11.29; ErrorCrossSpectral = 13.95.
In Figures 2 to 5 we compared three methods for
frequency domain transfer function estimation. In each
figure, the top picture shows the amplitudes of the true
and estimated frequency domain transfer function and the
bottom picture shows the phase of them. Figures 2 and 3 are
comparison between EFOP smoothing and ETFE smoothing
under noise variance of 0.5 and 1.5. The estimation error
for EFOP smoothing and ETFE smoothing in Figure 2 are
10.21 and 23.35, respectively. And the estimation error for
EFOP smoothing and ETFE smoothing in Figure 3 are 29.07
and 42.80, respectively. Figures 4 and 5 are comparison
between EFOP smoothing and cross-spectral method under
noise variance of 0.5 and 1.5. The estimation error for EFOP
smoothing and cross-spectral method in Figure 4 are 11.29
and 13.95, respectively. And the estimation error for EFOP
smoothing and Cross Spectral Method in Figure 5 is 17.60 and
20.30, respectively.
In all simulations, the variance of input signals are 1. And
all results are obtained by smoothing with a same hamming
window of length 2. It can be seen from the results that
EFOP method gives better estimation of the transfer function
than ETFE and cross-spectral method. Figure 6 is obtained by
numerical simulations. The error values in Figure 6 are also
represented in Table 1. The estimation error increases with
noise signal ratio and EFOP smoothing gets estimations of
transfer function with lowest error values.
6. Conclusion
In this paper, the convergence of transfer function estimation
based on integrity form of the GPE criterion with frequency
domain window function is analyzed. This smoothing technic
gives better results on transfer functions of linear models than
traditional ETFE method, especially for systems disturbed by
large noises. The consistent property and convergence rate of
Journal of Applied Mathematics
20
0
15
−1
Phase (rad)
Amplitude
8
10
5
0
0
0.5
1
1.5
2
2.5
3
Frequency (rad/s)
True transfer function
EFOP smoothing
Cross spectrum method
−2
−3
−4
0
0.5
1
1.5
2
Frequency (rad/s)
2.5
3
True transfer function
EFOP smoothing
Cross spectrum method
(a)
(b)
Figure 5: Results of EFOP smoothing and cross-spectral method for system in (43) under 𝜎𝑒2 = 1.5 ErrorEFOP = 17.60; ErrorCrossSpectral =
20.30.
70
Estimation error
60
50
40
30
20
10
0
0
0.2
0.4
0.6
0.8
1
1.2
Noise variance
1.4
1.6
1.8
2
ETFE smoothing
Cross spectral
EFOP smoothing
Figure 6: Estimate error of EFOP smoothing, ETFE smoothing, and
cross-spectral method for system in (43) under 𝜎𝑒2 from 0.1 to 1.9.
this method are obtained. Simulations for identification of
frequency domain transfer functions are given to illustrate
the advantage of this technic derived.
Acknowledgment
This work is supported by the Funds 863 Project
2012AA040906, NSFC61171121, NSFC60973049, and the
Science Foundation of Chinese Ministry of EducationChina Mobile 2012.
References
[1] L. Ljung, System Identification, Wiley Online Library, 1999.
[2] C. Bingham, M. Godfrey, and J. Tukey, “Modern techniques of
power spectrum estimation,” IEEE Transactions on Audio and
Electroacoustics, vol. 15, no. 2, pp. 56–66, 1967.
[3] P. C. W. Sommen, P. J. van Gerwen, H. J. Kotmans, and
A. J. E. M. Janssen, “Convergence analysis of a frequencydomain adaptive filter with exponential power averaging and
generalized window function,” IEEE Transactions on Circuits
and Systems, vol. 34, no. 7, pp. 788–798, 1987.
[4] R. Pintelon and J. Schoukens, System Identification: A Frequency
Domain Approach, Wiley-IEEE Press, 2004.
[5] A. Stenman, F. Gustafsson, D. E. Rivera, L. Ljung, and T. McKelvey, “On adaptive smoothing of empirical transfer function
estimates,” Control Engineering Practice, vol. 8, no. 11, pp. 1309–
1315, 2000.
[6] H. Hjalmarsson and B. Ninness, “Least-squares estimation
of a class of frequency functions: a finite sample variance
expression,” Automatica, vol. 42, no. 4, pp. 589–600, 2006.
[7] J. C. Agüero, J. I. Yuz, G. C. Goodwin, and R. A. Delgado,
“On the equivalence of time and frequency domain maximum
likelihood estimation,” Automatica, vol. 46, no. 2, pp. 260–270,
2010.
[8] K. Lo and W. H. Kwon, “A new identification approach for FIR
models,” IEEE Transactions on Circuits and Systems II, vol. 49,
no. 6, pp. 439–446, 2002.
[9] K. Lo and H. Kimura, “Recursive estimation methods for
discrete systems,” IEEE Transactions on Automatic Control, vol.
48, no. 11, pp. 2019–2023, 2003.
[10] J. C. Agüero, W. Tang, J. I. Yuz, R. Delgado, and G. C.
Goodwin, “Dual time-frequency domain system identification,”
Automatica, vol. 48, no. 12, pp. 3031–3041, 2012.
[11] K. Lo, H. Kimura, W. H. Kwon, and X. Yang, “Empirical
frequency-domain optimal parameter estimate for black-box
processes,” IEEE Transactions on Circuits and Systems I, vol. 53,
no. 2, pp. 419–430, 2006.
[12] H. J. Vermeulen, J. M. Strauss, and V. Shikoana, “Online
estimation of synchronous generator parameters using PRBS
perturbations,” IEEE Transactions on Power Systems, vol. 17, no.
3, pp. 694–700, 2002.
Advances in
Operations Research
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Advances in
Decision Sciences
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Mathematical Problems
in Engineering
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Journal of
Algebra
Hindawi Publishing Corporation
http://www.hindawi.com
Probability and Statistics
Volume 2014
The Scientific
World Journal
Hindawi Publishing Corporation
http://www.hindawi.com
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
International Journal of
Differential Equations
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Volume 2014
Submit your manuscripts at
http://www.hindawi.com
International Journal of
Advances in
Combinatorics
Hindawi Publishing Corporation
http://www.hindawi.com
Mathematical Physics
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Journal of
Complex Analysis
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
International
Journal of
Mathematics and
Mathematical
Sciences
Journal of
Hindawi Publishing Corporation
http://www.hindawi.com
Stochastic Analysis
Abstract and
Applied Analysis
Hindawi Publishing Corporation
http://www.hindawi.com
Hindawi Publishing Corporation
http://www.hindawi.com
International Journal of
Mathematics
Volume 2014
Volume 2014
Discrete Dynamics in
Nature and Society
Volume 2014
Volume 2014
Journal of
Journal of
Discrete Mathematics
Journal of
Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com
Applied Mathematics
Journal of
Function Spaces
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Optimization
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014