Document 10905446
advertisement

Hindawi Publishing Corporation
Journal of Applied Mathematics
Volume 2012, Article ID 978729, 18 pages
doi:10.1155/2012/978729
Research Article
Integration Processes of Delay Differential
Equation Based on Modified Laguerre Functions
Yeguo Sun
Department of Mathematics and Computational Science, Huainan Normal University,
238 Dongshan West Road, Huainan 232038, China
Correspondence should be addressed to Yeguo Sun, yeguosun@126.com
Received 30 March 2012; Revised 2 May 2012; Accepted 14 August 2012
Academic Editor: Ram N. Mohapatra
Copyright q 2012 Yeguo Sun. This is an open access article distributed under the Creative
Commons Attribution License, which permits unrestricted use, distribution, and reproduction in
any medium, provided the original work is properly cited.
We propose long-time convergent numerical integration processes for delay differential equations.
We first construct an integration process based on modified Laguerre functions. Then we establish
its global convergence in certain weighted Sobolev space. The proposed numerical integration
processes can also be used for systems of delay differential equations. We also developed a
technique for refinement of modified Laguerre-Radau interpolations. Lastly, numerical results
demonstrate the spectral accuracy of the proposed method and coincide well with analysis.
1. Introduction
Time delay systems which are described by delay differential equations DDEs or more
generally functional differential equations FDEs have been studied rather extensively in
the past thirty years since time delays are often the sources of instability and encountered
in various engineering systems such as chemical processes, economic markets, chemical
reactions, and population dynamics 1, 2. Nakagiri 1 studied the structural properties of
linear autonomous functional differential equations in Banach spaces within the framework
of linear operator theory. The system stability and the compactness of the operators
describing the solution trajectories are investigated in 2. Depending on whether the
existence of time delays or not, stability criteria for time delay systems can be divided into two
types: delay-dependent ones and delay-independent ones. De la Sen and Luo 3 deal with
the global uniform exponential stability independent of delay of time-delay linear and timeinvariant systems. By exploiting appropriate Lyapunov functional candidate, new delaydependent robust stability criteria of uncertain time-delay systems are proposed in 4.
2
Journal of Applied Mathematics
However, most DDEs do not have analytic solution, so it is generally necessary to
resort to numerical methods 5, 6. It is well known that a numerical method which is
convergent in a finite interval does not necessarily yield the same asymptotic behavior
as the underlying differential equation. If the numerical solution defines a dynamical
system, then we would study whether this dynamical system inherits the dynamics of the
underlying system. Hence it is crucial to understand the behavior of numerical solution in
order that we may interpret the data and facilitate the design of algorithms which provide
correct qualitative information without being unduly expensive. The classical analysis of
linear multistep methods 7–9 and Runge-Kutta methods 10–12 for delay differential
equations involves assessment of stability and accuracy but has also been supplemented by
considerable practical experience and experimentation.
As a basic tool, the Runge-Kutta method plays an important role in numerical
integrations of delay differential equations. We usually designed this kind of numerical
schemes in two ways. The first way is based on Taylor’s expansion coupled with other
techniques. The next is to construct numerical schemes by using collocation approximation.
For instance, Butcher 13, 14 provided some implicit Runge-Kutta processes based on the
Radau Quadrature formulas; also see 15, 16 and the references therein.
Recently, Guo et al. 17 proposed an integration process for ordinary differential
equations based on modified Laguerre functions, which are very efficient for long-time
numerical simulations of dynamical systems. But so far, to our knowledge, there is no
work concerning the applications of Laguerre approximation to integration process for delay
differential equations.
In this paper, we construct a new integration processes for delay differential equations
based on modified Laguerre functions and establish its global convergence in certain
weighted Sobolev space. Numerical results demonstrate the spectral accuracy of the proposed method and coincide well with analysis.
2. Modified Laguerre-Radau Function for Delay Differential Equations
Let ωβ t e−βt , β > 0, and define the weighted space L2ωβ 0, ∞ as usual, with the following
inner product and norm:
u, vωβ ∞
utvtωβ tdt,
0
vωβ v, v1/2
ωβ .
2.1
The modified Laguerre polynomial of degree l is defined by cf. 18
β
Ll t 1 βt dl l −βt e
te
,
l! dtl
l ≥ 0.
2.2
Journal of Applied Mathematics
3
For example,
β
L0 t 1,
β
L1 t 1 − βt,
β2 2
t .
2
β
L2 t −2βt 2.3
The modified Laguerre polynomials satisfy the recurrence relation
d β
d β
β
L t Ll−1 t − βLl−1 t,
dt l
dt
2.4
l ≥ 1.
The set of Laguerre polynomials is a complete L2ωβ 0, ∞-orthogonal system, namely,
β
β
Ll , Lm
ωβ
1
δl,m ,
β
2.5
where δl,m is the Kronecker function. Thus, for any v ∈ L2ωβ 0, ∞,
vt ∞
l0
β
.
vl β v, Ll
β
vl Ll t,
2.6
ωβ
Let N be any positive integer and PN 0, ∞ the set of all algebraic polynomials of degree at
the modified Laguerre-Radau interpolation points. Indeed, tN
0,
most N. We denote by tN
β,j
β,0
β
1 ≤ j ≤ N are the distinct zeros of d/dtLN1 t. By using 2.1 and the formula
and tN
β,j
2.12 of 19, the corresponding Christoffel numbers are as follows:
N
ωβ,0
1
,
βN 1
N
ωβ,j
βN β
1LN
1
β ,
tN
LN1 tN
β,j
β,j
1 ≤ j ≤ N.
2.7
For any ρ ∈ P2N 0, ∞,
∞
N N
N
ρ tβ,j ωβ,j ρtωβ tdt.
j0
0
2.8
Next, we define the following discrete inner product and norm:
u, vωβ ,N N N
N
u tN
β,j v tβ,j ωβ,j ,
j0
vωβ ,N v, v1/2
ωβ ,N .
2.9
4
Journal of Applied Mathematics
For any φ, ψ ∈ PN 0, ∞,
φ, ψ
ωβ
φ φ
.
ωβ
ωβ ,N
φ, ψ ωβ ,N ,
2.10
For all v ∈ L2ωβ 0, ∞, the modified Laguerre-Radau interpolant Iβ,N v ∈ PN 0, ∞ is determined by
v
tN
Iβ,N v tN
β,j
β,j ,
0 ≤ j ≤ N.
2.11
By 2.10, for any φ ∈ PN 0, ∞,
Iβ,N v, φ
ωβ
Iβ,N v, φ ωβ ,N v, φ ωβ ,N .
2.12
The interpolant Iβ,N v can be expanded as
Iβ,N vt N
N β
v
β,l
Ll t.
2.13
l0
By virtue of 2.5 and 2.10,
β
N
β Iβ,N v, Ll
v
β,l
ωβ
β
β v, Ll
ωβ ,N
2.14
.
β
β
Define the modified Laguerre functions L
l t e−1/2βt Ll t as the base functions.
β
According to 2.4, the functions L
t satisfy the recurrence relation
l
d β
d β
1 β
1 β
L t L
l−1 t − βL
l t − βL
l−1 t,
dt l
dt
2
2
l ≥ 1.
2.15
Denote by u, v and v the inner product and the norm of the space L2 0, ∞, respectively.
β
The set of L
l t is a complete L2 0, ∞-orthogonal system, that is,
1
β
β
L
l , L
m δl,m .
β
2.16
We now introduce the new Laguerre-Radau interpolation. Set
β β
β
QN 0, ∞ span L
0 , L
1 , . . . , L
N .
2.17
Journal of Applied Mathematics
5
N
and ωβ,j
be the same as in 2.7, and take the nodes and weights of the new LaguerreLet tN
β,j
Radau interpolation as
tN tN ,
β,j
β,j
N
ω
β,j
β
L
N
tN
β,j
1
βtN N
.
e β,j ωβ,j
β
N
L
N1 tβ,j
2.18
The discrete inner product and norm can be defined similarly as
u, vβ,N N N
N
β,j
u tN
,
β,j v tβ,j ω
.
vβ,N v, v1/2
β,N
j0
2.19
For any φ1 , φ2 ∈ QN 0, ∞, we have φ1 e−1/2βt ψ1 , φ2 e−1/2βt ψ2 , and ψ1 , ψ2 ∈ PN 0, ∞.
Thus by 2.10,
φ1 , φ2 β,N ψ1 , ψ2 ωβ ,N ψ1 , ψ2 ωβ φ1 , φ2 .
2.20
The new Laguerre-Radau interpolant I
β,N v ∈ QN 0, ∞ is determined by
N
I
β,N v tN
β,j v tβ,j ,
0 ≤ j ≤ N.
2.21
Due to the equality 2.20, for any φ ∈ QN 0, ∞,
I
β,N v, φ I
β,N v, φ
β,N
v, φ β,N .
2.22
Let
I
β,N vt N
N β
v
β,l
Ll t.
2.23
l0
Then, with the aid of 2.16 and 2.22, we derive that
β
β
N
v
β,l
β I
β,N v, L
l
β I
β,N v, L
l
β,N
β
β v, L
l
β,N
2.24
.
There is a close relation between Iβ,N and I
β,N . From the previous two equalities, it follows
that
e1/2βt I
β,N vt N
l0
β
N
v
β,l
Ll t β
N l0
β
v, L
l
β
β,N
Ll t β
N l0
β
e1/2βt v, Ll
β
ωβ ,N
Ll t.
2.25
6
Journal of Applied Mathematics
This with 2.14 implies
I
β,N vt e−1/2βt Iβ,N e1/2βt vt .
2.26
Consider the following delay differential equation:
d
Wt fWt, Wt − τ,
dt
Wt Φt,
t > 0,
2.27
−τ ≤ t ≤ 0.
For any fixed positive integer N, we define
⎛
⎞
tτ
Ut W ⎝ N ⎠,
tβ,N
2.28
and denote
τ τ
.
tN
β,N
2.29
Then system of 2.27 can be transformed into
d
,
Ut τf Ut, U t − tN
β,N
dt
Ut Φt
τ ,
t > 0,
2.30
−tN
β,N ≤ t ≤ 0.
We suppose that Ut is sufficiently continuously differentiable for t ≥ 0. Let
GN
β,1 t d
d
Iβ,N Ut − I
β,N Ut.
dt
dt
2.31
Then we obtain that
d
N
N
N
f U tN
GN
Iβ,N U tN
β,k τ
β,k , U tβ,k − tβ,N
β,1 tβ,k ,
dt
1 ≤ k ≤ N.
2.32
Journal of Applied Mathematics
7
N be the coefficients of
Now we derive an explicit expression for the left side of 2.32. Let U
β,l
β
I
β,N Ut in terms of L
t. Due to 2.15, we have
l
N
N
l−1
d
d
1
β
β
β
N
N
2 L
m t L
l t
L
t − β U
U
Iβ,N Ut β,l
dt
dt l
2 l1 β,l m0
l0
2.33
1 N β
− βU
β,0 L0 t.
2
This equality and 2.24 imply that
⎛
⎞
N
l−1
N
β d
1
β N
β N
N
2
N
N
N⎠
⎝
2 Lm tβ,k Ll tβ,k
β,j
U tβ,j Ll tβ,j ω
Iβ,N U tβ,k − β
dt
2 l1 j0
m0
⎛
⎞
N
β 1 2 ⎝
β
N
N
N
β,j ⎠L
0 tN
U tβ,j L
0 tβ,j ω
− β
β,k .
2
j0
2.34
Denote for 0 ≤ j ≤ N and 1 ≤ k ≤ N
aN
β,k,j
1
N
− β2 ω
β,j
2
N
l−1
β β N
β N
β N
β N
N
2 Lm tβ,k Ll tβ,k
L0 tβ,j L0 tβ,k
.
Ll tβ,j
l1
m0
2.35
Then
N
d
N
Iβ,N U tN
a
U
tN
β,k
β,k,j
β,j .
dt
j0
Denote
T
N
UN U0, U tN
,
.
.
.
,
U
t
,
β,1
β,N
T
N
N
N
N
U
τ
f
U
t
,
φ
,
τ
f
U
t
,
φ
,
.
.
.
,
τ
f
U
t
,
φ
FN
,
0
1
N
β
β,0
β,1
β,N
N
,
φi Φ τ tN
β,i − tβ,N
i 0, 1, . . . , N,
2.36
8
Journal of Applied Mathematics
T
N
N
N
N
N
N
t
,
G
t
,
.
.
.
,
G
t
GN
G
,
β,1
β,1 β,1
β,1 β,2
β,1 β,N
⎛
AN
β
aN
aN
· · · aN
β,1,0
β,1,1
β,1,N
⎜
⎜ N
⎜ aβ,2,0 aN
β,2,1
⎜
⎜
..
⎜ ..
.
⎜ .
⎜ .
..
⎜ .
⎝ .
.
N
a
aN
β,N,0
β,N,1
⎞
⎟
⎟
⎟
· · · aN
β,2,N ⎟
.. ⎟
.
···
. ⎟
⎟
⎟
.. ⎟
···
. ⎠
· · · aN
β,N,N
2.37
Then, we obtain
N
N
N
AN
GN
β U Fβ U
β,1 ,
2.38
U0 Φ0.
We now approximate Ut by uN t ∈ QN 0, ∞. Clearly, I
β,N uN t uN t. Furthermore, we
set
T
N N
tβ,N
,
uN uN 0, uN tN
β,1 , . . . , u
T
N
τf uN tN
f uN tN
f uN t N
.
FN
β u
β,0 , φ0 , τ
β,1 , φ1 , . . . , τ
β,N , φN
2.39
By replacing UN by uN and neglecting GN
in 2.38, we derive a new integration process by
β,1
using the modified Laguerre functions. It is to seek uN such that
N
N
N
AN
,
β u Fβ u
2.40
u 0 Φ0.
N
The global numerical solution is
uN t N
l0
β
u
N
β,l Ll t,
t ≥ 0,
2.41
with
N β
u
N
β,l β u , Ll
β,N
β
N
j0
β N
tN
β,j
uN t N
.
β,j Ll
β,j ω
2.42
Journal of Applied Mathematics
9
Let
u
t N
⎧
N
⎪
⎨u t ∈ QN 0, ∞,
t ∈ 0, ∞,
⎪
⎩Φt
τ ,
,
0
.
t ∈ −tN
β,N
2.43
Then 2.40 is equivalent to the system
d N
u
t τf u
,
N t, u
N t − tN
β,N
dt
u
t Φt
τ ,
N
−tN
β,N
t > 0,
2.44
≤ t ≤ 0.
3. Convergence Analysis
In this section, we estimate the global error of numerical solution. For any rth continuously
differentiable function vt, we set
r v
1 β−1/2 ln N1/2 tr/2 d v ,
dtr ωβ
dtr ωβ
r2 r2 v
v
2
−1 r1/2 d
−1/2 r1/2 d
RN,r,β v β t
N
t
dtr2 dtr2 1
RN,r,β v
β t
−1 r−1/2 d
r
ωβ
r2 v
1/2 r1/2 d
−1/2
1β
ln N t
.
dtr2 ωβ
3.1
ωβ
The following lemmas will play a key role in obtaining our main results.
Lemma 3.1 see 19. If v ∈ L2ωβ 0, ∞, then for an integer r ≥ 1,
Iβ,N v − v ≤ c βN 1/2−r/2 R1 v.
N,r,β
ωβ
3.2
Lemma 3.2 see 19. If v ∈ L2ωβ 0, ∞, then for an integer r ≥ 1,
d
≤ c βN 1/2−r/2 R2 v.
v
−
v
I
β,N
dt
N,r,β
ωβ
3.3
Theorem 3.3. Suppose that there exists a real number γ0 > 0 such that
fu1 , v − fu2 , v u1 − u2 ≤ −γ0 |u1 − u2 |2 ,
∀u1 , u2 ∈ R,
3.4
10
Journal of Applied Mathematics
1
2
1
and RN,r,β U, RN,r,β U, and RN,r,β dU/dt are finite. Then
1/2−r/2
c N ≤
βN
U − u
γ0 τ
1 dU
2
1
× γ0 τ β RN,r,β e1/2βt U RN,r,β e1/2βt U RN,r,β e1/2βt
dt
.
3.5
N t − I
β,N Ut. Subtracting 2.32 from 2.44, we get
Proof. Let EN t u
d N N N
N
N
t
−
G
E tβ,k GN
β,2 β,k
β,1 tβ,k ,
dt
1 ≤ k ≤ N,
3.6
E 0 0,
N
where
N
N N
N N
N
N
N
N
t
τ
f
u
t
,
u
t
−
f
I
,
U
t
.
GN
−
t
U
t
−
t
β,N
β,2 β,k
β,k
β,k
β,N
β,k
β,k
β,N
3.7
N
We now multiply 3.6 by 2EN tN
ω
β,k
and sum the result for 1 ≤ k ≤ N. Due to EN 0 0,
β,k
we obtain that
!
"
d
N
2 EN , EN
AN
β,1 Aβ,2 ,
dt
β,N
3.8
where
N
N
AN
β,1 −2 Gβ,1 , E
β,N
,
N
N
AN
β,2 2 Gβ,2 , E
β,N
.
3.9
Using 2.20 and the Cauchy inequality, we deduce that
!
"
" #
!
#2
d
d
#
#
2 EN , EN
2 EN , EN #EN ∞# ,
dt
dt
β,N
#
#
# N#
#Aβ,1 # ≤ 2GN
β,1 β,N
N
E β,N
N 2GN
β,1 E .
3.10
Thus 3.8 reads
#2
#
#
# N
N N #E ∞# ≤ AN
β,2 2Gβ,1 E .
3.11
Journal of Applied Mathematics
11
Since there exists γ0 > 0 such that
fu1 , v − fu2 , v u1 − u2 ≤ −γ0 |u1 − u2 |2 ,
AN
β,2
∀u1 , u2 ∈ R,
2
≤ −2γ 0 EN ,
3.12
where γ 0 γ0 τ. Therefore
#2
2
2
#
1
#
# N
#E ∞# γ 0 EN ≤ GN
β,1 .
γ0
3.13
Hence it suffices to estimate GN
2 . With the aid of 2.26, Lemmas 3.1 and 3.2, we deduce
β,1
that, for r ≥ 1,
Iβ,N v − v Iβ,N e1/2βt v − e1/2βt v
ωβ
1/2−r/2 1 1/2βt ≤ c βN
RN,r,β e
v .
3.14
On the other hand,
d 1
Iβ,N v − v − βe−1/2βt Iβ,N e1/2βt v − e1/2βt v
dt
2
d
Iβ,N e1/2βt v − e1/2βt v .
e−1/2βt
dt
3.15
It follows from the above result that for r ≥ 1
d
1/2−r/2 1 1/2βt 2
βRN,r,β e
v RN,r,β e1/2βt v .
dt Iβ,N v − v ≤ c βN
3.16
Consequently,
d
d
d N Iβ,N U − U U − Iβ,N U
Gβ,1 ≤ dt
dt
dt 1/2−r/2
dU
1
2
1
≤ c βN
βRN,r,β e1/2βt U RN,r,β e1/2βt U RN,r,β e1/2βt
dt
.
3.17
Thus, 3.13 implies that
#
#
#
# N
1/2 #E ∞# γ 0 EN ≤
c
1/2
γ0
βN
1/2−r/2
dU
1
2
1
βRN,r,β e1/2βt U RN,r,β e1/2βt U RN,r,β e1/2βt
dt
.
3.18
12
Journal of Applied Mathematics
Furthermore, using 3.14 again, we obtain that, for any β > 0,
1/2−r/2
c
N ≤
βN
U − u
γ0
×
#
#
#
#
N ∞# ≤
#U∞ − u
γ0 β
1
RN,r,β
e
1/2βt
U 2
RN,r,β
e
1/2βt
U 1
RN,r,β
e1/2βt
dU
dt
,
# #
#
#
# #
#
#
#Iβ,N U∞ − U∞# #EN ∞#
#
1/2 1/2 #
#
#
≤ 2I
β,N U − U I
β,N U − U #EN ∞#
1
1/2−r/2
≤ c βN
1
γ −1/2
0
1
1/2βt
βγ −1/2
e
β
1
R
U
0
N,r,β
2
RN,r,β
e
1/2βt
U 1
γ −1/2
RN,r,β
0
dU
e1/2βt
dt
.
3.19
This completes the proof.
Remark 3.4. The norm U is finite as long as that fu, v satisfies certain conditions. If fu, v
satisfies conditions
fu1 , v − fu2 , v, u1 − u2 ≤ γ1 u1 − u2 2 , ∀u1 , u2 ∈ RN ,
fu, v1 − fu, v2 ≤ γ2 v1 − v2 , ∀v1 , v2 ∈ RN ,
γ1 < 0,
3.20
0 < γ2 < −γ1 ,
and f0, 0 0, then |Ut| Oe−γ∗ t, γ∗ > 0, see Tian 5. Furthermore, if fu, v fulfills
some additional conditions, then the norms appearing at the right sides of 3.19 are finite.
Therefore, for certain positive constant c∗ depending only on β,
#
#
1
#
#
N ∞# c∗ 1 N #U∞ − u
ln N1/2 N 1/2−r/2 .
U − u
γ0
3.21
Consequently, for r > 1, the scheme 2.40 has the global convergence and the spectral
accuracy in L2 0, ∞. Moreover, at the infinity, the numerical solution has the same accuracy.
This also indicates that the pointwise numerical error decays rapidly as the mode N increases,
with the convergence rate as c∗ ln N1/2 N 1/2−r/2 . On the other hand, for any fixed N, the
norm U − u
N is bounded, and so the pointwise numerical error decays automatically as
t → ∞, at least less than cN t−1/2 , cN being a small number. Hence, it is very efficient for
long-time numerical simulations of dynamical systems, especially for stiff problems.
Journal of Applied Mathematics
13
Remark 3.5. The method proposed is also available for solving systems of delay differential
equations. Let
T
Ut
U1 t, U2 t, . . . , Um t ,
T
V
t V 1 t, V 2 t, . . . , V m t ,
3.22
T
V
, f 2 U,
V
, . . . , f m U,
V
V
f 1 U,
f
U,
.
We consider the system
d Ut f
Ut,
V
t ,
dt
Ut
Φt,
t > 0,
3.23
−τ ≤ t ≤ 0.
We approximate Ut
by u
N t. We can derive a numerical algorithm which is similar to
2.38. Further, let |V
|E be the Euclidean norm of V
. Assume that
#
#2
1 − Z
2 ≤ −γ0 ##Z
2 ## ,
2 , V
1 − Z
1 , V
− f
Z
f
Z
· Z
E
γ0 > 0.
3.24
Then we can obtain an error estimate similar to 3.19.
4. Refinement and Numerical Results
In the preceding sections, we introduced an integration process for solving delay differential
equations. Theoretically, their numerical errors with bigger N decrease faster. But in practical
computation, it is not convenient to use them with very big N. On the other hand, the distance
and tN
increases fast as N and j increase,
between the adjacent interpolation nodes tN
β,j
β,j−1
especially for the nodes which are located far from the origin point t 0. This is one of
advantages of the Laguerre interpolation approximation, since we can use moderate mode
N to evaluate the unknown function at large t, but it is also its shortcoming. In fact, if the
exact solution oscillates or changes very rapidly between two large adjacent interpolation
nodes, then we may lose information about the structure of exact solution between those
nodes. To remedy this deficiency, we may refine the numerical results as follows.
}N {tN
}N .
Let N be a moderate positive integer, β > 0, and the set of nodes {tN
0,β,j j0
β,j j0
We use 2.40 with the interpolation nodes {tN
}N to obtain the original numerical solution
0,β,j j0
u0,N t uN t,
0 ≤ t ≤ tN
0,β,N .
4.1
14
Journal of Applied Mathematics
0.5
0.4
0.3
0.2
Y1 (t)
0.1
0
−0.1
−0.2
−0.3
−0.4
−0.5
0
1
2
3
4
5
6
t
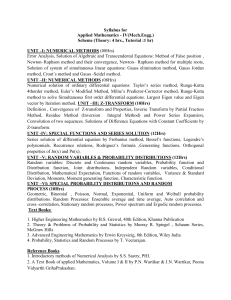
Figure 1: Exact solution.
Then we take tN
tN
and consider the following delay differential equation:
1,β,0
0,β,N
d 1
U t τf U1 t, U1 t − tN
β,N
dt
1
0,N
U t u
t,
tN
1,β,0
−τ ≤t≤
, t > tN
1,β,0 ,
4.2
tN
1,β,0 .
We get the refined numerical solution u1,N t for tN
≤ t ≤ tN
. Repeating the above
1,β,0
1,β,N
procedure, we obtain the refined numerical solution um,N t for tN
≤ t ≤ tN
.
m,β,0
m,β,N
5. Numerical Results
We consider the following system of four homogeneous delay differential equations:
ẏ1 t y3 t,
ẏ2 t y4 t,
ẏ3 t − 2ny2 t 1 n2 −1n y1 t − π,
ẏ4 t − 2ny1 t 1 n2 −1n y2 t − π.
5.1
Journal of Applied Mathematics
15
1
0.8
0.6
0.4
Y3 (t)
0.2
0
−0.2
−0.4
−0.6
−0.8
−1
0
1
2
3
4
5
6
t
Figure 2: Exact solution.
N = 15, bt = 10
0.5
0.4
0.3
y1 (t) and Y1 (t)
0.2
0.1
0
−0.1
−0.2
−0.3
−0.4
−0.5
0
0.5
1
1.5
2
2.5
3
3.5
t
Y1 (t)
y1 (t)
Figure 3: Numerical solution and exact solution.
The initial functions and solutions are given by
y1 t sint cosnt,
y2 t cost sinnt,
y3 t ẏ1 t,
y4 t ẏ2 t,
t ∈ −π, ∞.
5.2
16
Journal of Applied Mathematics
N = 10, bt = 15
1
0.8
0.6
Y3 (t) and y3 (t)
0.4
0.2
0
−0.2
−0.4
−0.6
−0.8
−1
0
0.5
1
1.5
2
2.5
3
3.5
t
Y3 (t)
y3 (t)
Figure 4: Numerical solution and exact solution.
N = 15, bt = 10, step = 3
0.5
0.4
0.3
Y1 (t) and y1 (t)
0.2
0.1
0
−0.1
−0.2
−0.3
−0.4
−0.5
0
2
4
6
8
10
t
Y1 (t)
y1 (t)
Figure 5: Numerical solution of refined method and exact solution.
For n 1, Figures 1 and 2 show plots of the exact solution y1 t and y3 t on 0, 2π, which
controls the frequency of oscillation in the initial data and solution. Figures 3 and 4 are
the exact and numerical solution on 0, π with N 15, β 10. The refined numerical results
are given in Figures 5 and 6 on 0, 3π.
The numerical experiments show that our numerical integration processes are efficient
for numerically solving delay differential equations.
Journal of Applied Mathematics
17
N = 15, bt = 10, step = 3
1
0.8
0.6
Y3 (t) and y3 (t)
0.4
0.2
0
−0.2
−0.4
−0.6
−0.8
−1
0
2
4
6
8
10
t
Y3 (t)
y3 (t)
Figure 6: Numerical solution of refined method and exact solution.
6. Conclusions
In this paper, we proposed new integration processes of delay differential equations, which
have fascinating advantages. On the one hand, the suggested integration processes are based
on the modified Laguerre functions on the half line; they provide the global numerical
solution and the global convergence naturally and thus are available for long-time numerical
simulations of dynamical systems. On the other hand, benefiting from the rapid convergence
of the modified Laguerre functions, these processes possess the spectral accuracy. In
particular, the numerical results fit the exact solutions well at the interpolation nodes.
Furthermore, We also developed a technique for refinement of modified Laguerre-Radau
interpolations. Lastly, numerical results demonstrate the spectral accuracy of the proposed
method and coincide well with analysis.
Acknowledgments
This work is supported by the Program of Science and Technology of Huainan no. 2011A
08005. The authors wish to thank the anonymous referees for carefully correcting the preliminary version of the paper. Special and warm thanks are addressed to Professor Ram N.
Mohapatra for his valuable comments and suggestions for improving this paper.
References
1 S. I. Nakagiri, “Structural properties of functional-differential equations in Banach spaces,” Osaka
Journal of Mathematics, vol. 25, no. 2, pp. 353–398, 1988.
2 M. De la Sen, “Stability of impulsive time-varying systems and compactness of the operators mapping
the input space into the state and output spaces,” Journal of Mathematical Analysis and Applications, vol.
321, no. 2, pp. 621–650, 2006.
18
Journal of Applied Mathematics
3 M. De la Sen and N. Luo, “On the uniform exponential stability of a wide class of linear time-delay
systems,” Journal of Mathematical Analysis and Applications, vol. 289, no. 2, pp. 456–476, 2004.
4 C. Wang and Y. Shen, “Improved delay-dependent robust stability criteria for uncertain time delay
systems,” Applied Mathematics and Computation, vol. 218, no. 6, pp. 2880–2888, 2011.
5 H. J. Tian, “The exponential asymptotic stability of singularly perturbed delay differential equations
with a bounded lag,” Journal of Mathematical Analysis and Applications, vol. 270, no. 1, pp. 143–149,
2002.
6 Y. Xu, J. J. Zhao, and Z. N. Sui, “Stability analysis of exponential Runge-Kutta methods for delay
differential equations,” Applied Mathematics Letters, vol. 24, no. 7, pp. 1089–1092, 2011.
7 C. M. Huang, “Asymptotic stability of multistep methods for nonlinear delay differential equations,”
Applied Mathematics and Computation, vol. 203, no. 2, pp. 908–912, 2008.
8 C. M. Huang, “Stability of linear multistep methods for delay integro-differential equations,”
Computers & Mathematics with Applications, vol. 55, no. 12, pp. 2830–2838, 2008.
9 P. Hu, C. M. Huang, and S. L. Wu, “Asymptotic stability of linear multistep methods for nonlinear
neutral delay differential equations,” Applied Mathematics and Computation, vol. 211, no. 1, pp. 95–101,
2009.
10 W.-S. Wang and S. F. Li, “Conditional contractivity of Runge-Kutta methods for nonlinear differential
equations with many variable delays,” Communications in Nonlinear Science and Numerical Simulation,
vol. 14, no. 2, pp. 399–408, 2009.
11 Y. X. Yu, L. P. Wen, and S. F. Li, “Nonlinear stability of Runge-Kutta methods for neutral delay integrodifferential equations,” Applied Mathematics and Computation, vol. 191, no. 2, pp. 543–549, 2007.
12 L. P. Wen, Y. X. Yu, and S. F. Li, “Dissipativity of Runge-Kutta methods for Volterra functional differential equations,” Applied Numerical Mathematics, vol. 61, no. 3, pp. 368–381, 2011.
13 J. C. Butcher, “Implicit Runge-Kutta processes,” Mathematics of Computation, vol. 18, pp. 50–64, 1964.
14 J. C. Butcher, “Integration processes based on Radau quadrature formulas,” Mathematics of
Computation, vol. 18, pp. 233–244, 1964.
15 E. Hairer, S. P. Norsett, and G. Wanner, Solving Ordinary Differential Equations I: Nonstiff Problems, vol. 8
of Springer Series in Computational Mathematics, Springer, Berlin, Germany, 1987.
16 E. Hairer and G. Wanner, Solving Ordinary Differential Equations II: Stiff and Differential-Algebraic
Problems, vol. 14 of Springer Series in Computational Mathematics, Springer, Berlin, Germany, 1991.
17 B. Y. Guo, Z. Q. Wang, H. J. Tian, and L. L. Wang, “Integration processes of ordinary differential
equations based on Laguerre-Radau interpolations,” Mathematics of Computation, vol. 77, no. 261, pp.
181–199, 2008.
18 B. Y. Guo and X. Y. Zhang, “A new generalized Laguerre spectral approximation and its applications,”
Journal of Computational and Applied Mathematics, vol. 181, no. 2, pp. 342–363, 2005.
19 B. Y. Guo, L. L. Wang, and Z. Q. Wang, “Generalized Laguerre interpolation and pseudospectral
method for unbounded domains,” SIAM Journal on Numerical Analysis, vol. 43, no. 6, pp. 2567–2589,
2006.
Advances in
Operations Research
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Advances in
Decision Sciences
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Mathematical Problems
in Engineering
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Journal of
Algebra
Hindawi Publishing Corporation
http://www.hindawi.com
Probability and Statistics
Volume 2014
The Scientific
World Journal
Hindawi Publishing Corporation
http://www.hindawi.com
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
International Journal of
Differential Equations
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Volume 2014
Submit your manuscripts at
http://www.hindawi.com
International Journal of
Advances in
Combinatorics
Hindawi Publishing Corporation
http://www.hindawi.com
Mathematical Physics
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Journal of
Complex Analysis
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
International
Journal of
Mathematics and
Mathematical
Sciences
Journal of
Hindawi Publishing Corporation
http://www.hindawi.com
Stochastic Analysis
Abstract and
Applied Analysis
Hindawi Publishing Corporation
http://www.hindawi.com
Hindawi Publishing Corporation
http://www.hindawi.com
International Journal of
Mathematics
Volume 2014
Volume 2014
Discrete Dynamics in
Nature and Society
Volume 2014
Volume 2014
Journal of
Journal of
Discrete Mathematics
Journal of
Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com
Applied Mathematics
Journal of
Function Spaces
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Optimization
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014