Document 10905426
advertisement

Hindawi Publishing Corporation
Journal of Applied Mathematics
Volume 2012, Article ID 956370, 17 pages
doi:10.1155/2012/956370
Research Article
Robust Stability of Switched Delay
Systems with Average Dwell Time under
Asynchronous Switching
Jun Cheng,1 Hong Zhu,1 Shouming Zhong,2, 3 and Yuping Zhang1
1
School of Automation Engineering, University of Electronic Science and Technology of China, Sichuan,
Chengdu 611731, China
2
School of Mathematical Sciences, University of Electronic Science and Technology of China, Sichuan,
Chengdu 611731, China
3
Key Laboratory for Neuroinformation of Ministry of Education,
University of Electronic Science and Technology of China, Sichuan, Chengdu 611731, China
Correspondence should be addressed to Jun Cheng, jcheng6819@126.com
Received 10 August 2012; Accepted 7 September 2012
Academic Editor: Chong Lin
Copyright q 2012 Jun Cheng et al. This is an open access article distributed under the Creative
Commons Attribution License, which permits unrestricted use, distribution, and reproduction in
any medium, provided the original work is properly cited.
The problem of robust stability of switched delay systems with average dwell time under
asynchronous switching is investigated. By taking advantage of the average dwell-time method
and an integral inequality, two sufficient conditions are developed to guarantee the global
exponential stability of the considered switched system. Finally, a numerical example is provided
to demonstrate the effectiveness and feasibility of the proposed techniques.
1. Introduction
In recent years, there has been increasing interest in the analysis and switched systems
because of its applications in a variety of areas such as signal processing, signal estimation,
pattern recognition, communications, control application, and many practical control
systems. Switched linear systems comprise a collection of linear subsystems described by
differential or difference equations and a switching law to specify the switching among
these subsystems. A switched system is a combination of discrete and continuous dynamical
systems. All of these systems arise as models for phenomena which cannot be described
by exclusively continuous or exclusively discrete processes. Most recently, on the basis
of Lyapunov functions and other analysis tools, the stability or stabilization for linear or
nonlinear switched systems has been further investigated, and many valuable results have
2
Journal of Applied Mathematics
been obtained, for a recent survey on this topic and related questions has attracted increasing
attention 1–10. The average dwell-time is an effective method for the switched systems
which do not exist common Lyapunov function. Time delay commonly exists in engineering.
Because of time delay, the system can become unstable or less capable, it is significant to
study time delay. There are two kinds of stability for switched systems with time delay: time
delay-independent stability and time delay-dependent stability. The time delay-independent
stability is obviously conservative to the bounded time delay or small time delay, many
results are obtained 11–13. At present, there has been increasing interest in time-delay
switched systems, and many valuable results have been obtained 14–18.
It is worth noting that the aforementioned results are all based on the basic assumption
that the switching instants are simultaneous with those of the system. However, in actual
operation, there inevitably exists asynchronous switching between the controllers and the
practical subsystems, that is to say, the real switching instants of the controller exceed
or lag behind those of the system, which will deteriorate performance of the systems. In
fact, the necessity of taking into consideration the asynchronous switching is shown in
efficient controller design in many mechanical and chemical systems. There are some results
presented on control synthesis under asynchronous switching which have been proposed
19–28. However, to the best of our knowledge, the issue of switched delay systems under
asynchronous switching has not fully been investigated, which motivated this study for us.
In this paper, we deal with the problem of robust stability and L2 -gain of switched
delay systems under asynchronous switching. In terms of the average dwell-time method
and an integral inequality, two sufficient conditions are developed to guarantee the global
exponential stability of the considered switched system. Finally, a numerical example is
provided to illustrate the effectiveness and feasibility.
Notations. Throughout this paper, n denotes the n-dimensional Euclidean space and n×n
refers to the set of all n × m real matrices. For real symmetric matrices X and Y , the notation
X ≥ Y resp., X > Y mean that the matrix X, Y are positive semidefinite, resp., and positive
definite. I is the identity matrix with appropriate dimensions. ∗ represents the elements
below the main diagonal of a symmetric matrix. The superscripts and −1 stand for matrix
transposition and matrix inverse, respectively; · c denotes the Euclidean norm. λmax P and λmin P denote the maximum and minimum eigenvalues of matrix P , respectively. The
shorthand diag{M1 , . . . , Mn } denotes a block diagonal matrix with diagonal blocks being the
matrices M1 , . . . , Mn . In this paper, if not explicit, matrices are assumed to have compatible
dimensions.
2. Preliminaries
In this paper, we consider the following time-delay system described by
ẋt Aσt xt Aτσt xt − τt Bσt ωt,
zt Cσt xt Dσt ωt,
xt φt,
2.1
t ∈ −τM , 0,
where xt ∈ Rn is the state of the system, ωt ∈ Rq is the noise signal. Switching signal σt is
a piecewise constant function of time t, and we take values in a finite set P {1, 2, . . . , r}, r > 0
Journal of Applied Mathematics
3
denotes the number of subsystems. σt i ∈ P means the ith subsystem is active, and the
corresponding subsystem matrices are denoted by known constant matrices Ai , Aτi , Bi , Ci ,
and Di with appropriate dimensions and τt is the unknown time-varying delay satisfying
τ0 ≤ τt ≤ τM ,
τ̇t ≤ τ,
2.2
where τ0 , τM , and τ are constants; A, Aτ , and Ci are known real constant matrices; φt is a
compatible vector-valued initial function on −τM , 0.
The switching signal σt : → P {1, 2, . . . , r} discussed in this paper is time
dependent, that is, σt : {t0 , σt0 , t1 , σt1 , . . . , t , σt }, where t0 is the initial instant.
In this paper, we denote t represent the th switching instant. for convenience, σt is used
to denote the practical switching signal which can be written as
σt : {t0 Δ0 , σt0 , t1 Δ1 , σt1 , . . . , t Δ , σt },
2.3
where Δ < inf≥1 |t1 − t |, k 0, 1, . . . . Then there exist a matched period time interval
t−1 Δ−1 and mismatched period time interval t , t Δ because of asynchronous
switching. For simplicity, we assume that Δ > 0, 0, 1, . . . .
In this paper, we denote Λ1 and Λ2 as follows:
Λ1 xt ∈ n | σt i, σt1 j, t ∈ t Δ , t1 , 0, 1, 2, . . . ,
Λ2 xt ∈ n | σt1 j, t ∈ t1 , t1 Δ1 , 0, 1, 2, . . . .
2.4
Let
ϕt x t, x t − τt, x t − τM , x t − τ0 , ω t .
2.5
This way, system 2.1 can be rewritten as
ẋt Υσt · ϕt,
zt Cσt xt Dσt ωt,
xt φt,
2.6
t ∈ −τM , 0,
where
Υσt Aσt , Aτσt , 0, 0, Bσt .
2.7
First of all, we will give some definitions and lemmas about system 2.6 which plays
an important role in the derivation of our result.
4
Journal of Applied Mathematics
Definition 2.1 see 29. The unforced system is said to be exponential stable if there exist
constants ν > 0 and ϑ > 0 such that
xt ≤ ν sup ϕςc e−ϑt .
−τM ≤ς≤0
2.8
Definition 2.2 see 30. For γ > 0, the switched system 2.1 is said to have weighted L2 -gain,
if under zero initial condition φt, t ∈ −τM , 0, it holds that
∞
z szsds ≤ γ 2
0
∞
ω sωsds.
2.9
0
Definition 2.3 see 30. For any T2 > T1 ≥ 0, let Nσ T1 , T2 denote the switching number of
discontinuities of σt during on an intercal T1 , T2 . If Nσ T1 , T2 ≤ N0 T2 − T1 /Ta holds
for N0 ≥ 0 and Ta > 0, then N0 and Ta are called chattering bound and average dwell time,
respectively. Here we assume N0 0 for simplicity as commonly used in the literature.
Lemma 2.4 see 29. For any given symmetric positive definite matrix X ∈ n×n , and scalars
α > 0, 0 ≤ d1 < d2 , if there exists a vector function ẋt : −d2 , 0 → n such that the following
integration is well defined, then
−
−d1
−d2
≤
ẋt θ eαθ X ẋt θdθ
eαd1
α
xt − d1 X −X xt − d1 .
−X X xt − d2 − eαd2 xt − d2 2.10
Lemma 2.5 see 28. Let ≥ 0 and θ > δ > 0. If there exists a real-value continuous function
xt ≥ 0, t ≥ t0 , such that the differential inequality
dxt
≤ −θxt δ sup xs,
dt
t−≤s≤t
t ≥ t0
2.11
xt ≤ sup xt0 se−μt−t0 ,
t ≥ t0 ,
2.12
holds, then
−≤s≤0
where μ > 0, and satisfies μ − θ δeμ 0.
Lemma 2.6 see 9. If a real scalar function xt satisfies the following differential inequality:
ẋt ≤ −ςxt ηυt,
2.13
Journal of Applied Mathematics
5
where ς > 0, η > 0, then
xt ≤ e−ςt x0 η
t
e−ςs υt − sds.
2.14
0
3. Main Results
The following theorem presents a sufficient stability condition for system 2.1. We first
present conditions ωt 0, the corresponding closed-loop system is given by
σt · ψt,
ẋt Υ
xt φt,
3.1
t ∈ −τM , 0,
where
Υσt Aσt , Aτσt , 0, 0 ,
ϕt x t, x t − τt, x t − τM , x t − τ0 .
3.2
Theorem 3.1. For given scalars 0 ≤ τ0 ≤ τM , α > 0, β > 0, then the system 2.1 is exponentially
stable, if there exist positive-definite matrices Pi , Pij , Qki , Qkij k 1, 2, 3, and Rli , Rlij l 1, 2
such that the following LMIs hold:
⎡
α
1,1 Ξ
1,2 −
Ξ
R1i
1 − eατM
⎢
⎢
⎢
α
⎢
i ⎢ ∗ Ξ2,2 − eατ0 − eατM R2i
Ξ
⎢
⎢
3,3
⎢ ∗
∗
Ξ
⎣
∗
∗
∗
⎤
0
−
eατ0
α
R2i
− eατM
0
−e
−ατ0
Q3i eατ0
α
R2i
− eατM
⎥
⎥
⎥
⎥
⎥ < 0,
⎥
⎥
⎥
⎦
⎤
⎡
β
R1ij
0
⎥
⎢Ξ1,1 Ξ1,2
1 − e−βτM
⎥
⎢
⎥
⎢
⎥
⎢
β
β
⎥
⎢ ∗ Ξ
R2ij
R2ij
⎥<0
2,2
−βτ
−βτ
−βτ
−βτ
0
M
0
M
Ξi ⎢
e
−e
e
−e
⎥
⎢
⎥
⎢
⎥
⎢ ∗
∗
Ξ
0
3,3
⎥
⎢
⎦
⎣
β
βτ0
∗
∗
∗
−e Q3ij − −βτ
R2ij
−βτ
0
M
e
−e
3.3
3.4
6
Journal of Applied Mathematics
with
1,1 Q1i Q2i Q3i Pi Ai A Pi αPi Ξ
i
α
R1i τM Ai R1i Ai
1 − eατM
τM − τ0 Ai R2i Ai ,
1,2 Pi Aτi τM A R1i Aτi τM − τ0 A R2i Aτi ,
Ξ
i
i
α
R2i τM Aτi R1i Aτi τM − τ0 Aτi R2i Aτi ,
eατ0 − eατM
α
α
− e−ατM Q2i R1i ατ
R2i ,
1 − eατM
e 0 − eατM
2,2 − 1 − τe−ατM Q1i 2
Ξ
3,3
Ξ
Ξ1,1 Q1ij Q2ij Q3ij Pij Ai Ai Pij − βPij −β
R1ij τM Ai R1ij Ai
1 − e−βτM
3.5
τM − τ0 Ai R2ij Ai ,
Ξ1,2 Pij Aτi τM Ai R1ij Aτi τM − τ0 Ai R2ij Aτi ,
Ξ2,2 − 1 − τeβτM Q1ij − 2
β
R2ij τM Aτi R1ij Aτi τM − τ0 Aτi R2ij Aτi ,
−βτ
M
−e
e−βτ0
β
β
R1ij − −βτ
R2ij .
1 − e−βτM
e 0 − e−βτM
Ξ3,3 − eβτM Q2ij −
In this case, for any switching signal with the average dwell-time satisfying
Ta > Ta∗ ln μ2 μ1
,
κ
T t0 , t β κ
≥
,
T − t0 , t α − κ
3.6
3.7
0 ≤ κ < α.
System 3.1 is exponentially stable with μl ≥ 1 l 1, 2 satisfying that
Pj ≤ μ1 Pij ,
Pij ≤ μ2 Pi ,
Rlj ≤ μ1 Rlij ,
Qkj ≤ μ1 Qkij ,
Rlij ≤ μ2 Rli
Qkij ≤ μ2 Qki
k 1, 2, 3,
l 1, 2, ∀i / j, i, j ∈ P.
3.8
Proof. When t ∈ Λ1 , we consider the following Lyapunov-Krasovskii functional:
Vi t, xt V1i t, xt V2i t, xt V3i t, xt,
3.9
Journal of Applied Mathematics
7
where
V2i t, xt V1i t, xt x tPi xt,
t
e−αt−s x sQ1i xsds e−αt−s x sQ2i xsds
t
t−τt
t
t−τM
3.10
e−αt−s x sQ3i xsds,
t−τ0
V3i t, xt 0
−τM
t
e
−αt−s ẋ sR1i ẋsdsdθ tθ
−τ0 t
−τM
e−αt−s ẋ sR2i ẋsdsdθ.
tθ
Taking the time derivative of Vi t, xt for t ∈ 0, ∞ along the trajectory of the system
2.1 turns out to be
i ψt,
V̇1i t, xt 2x tPi Υ
V̇2i t, xt ≤ −αV2i t, xt x tQ1i Q2i Q3i xt
− 1 − τe−ατM x t − τtQ1i xt − τt
− e−ατM x t − τM Q2i xt − τM − e−ατ0 x t − τ0 Q3i xt − τ0 ,
R1i Υ
i ψt
V̇3i t, xt ≤ −αV3i t, xt τM ψ tΥ
i
3.11
R2i Υ
i ψt
τM − τ0 ψ tΥ
i
t
t−τ0
−
ẋ se−αt−s R1i ẋsds −
ẋ se−αt−s R2i ẋsds.
t−τM
t−τM
On the other hand, according to Lemma 2.4, we get that
−
t
ẋ se−αt−s R1i ẋsds ≤
t−τM
−
t−τ0
α
xt
R1i
−R1i
1 − eατM xt − τM −R1i
R1i
xt
,
xt − τM ẋ se−αt−s R2i ẋsds
t−τM
≤−
t−τ0
t−τt
≤
ẋ se−αt−s R2i ẋsds −
t−τt
ẋ se−αt−s R2i ẋsds
t−τM
α
xt − τ0 R2i
−R2i xt − τ0 xt − τt
−R2i R2i
eατ0 − eατM xt − τt
α
−R2i xt − τt
xt − τt
R2i
ατ
.
xt − τM −R2i R2i
e 0 − eατM xt − τM 3.12
8
Journal of Applied Mathematics
Then we can get
i ψt,
V̇i t, xt αVi t, xt ≤ ψ tΞ
3.13
where
i τM Υ
R2i Υ
R1i Υ
i τM − τ0 Υ
i
Ξ
i
i
⎡
α
0 Pi Aτi −
Ξ
R1i
1,1
1 − eατM
⎢
⎢
⎢
α
0
⎢ ∗
Ξ
R2i
2,2 − ατ0
⎢
e − eατM
⎢
⎢
3,3
⎢ ∗
∗
Ξ
⎣
∗
∗
∗
0
−
eατ0
α
R2i
− eατM
0
−e
−ατ0
Q3i α
R2i
eατ0 − eατM
⎤
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎦
3.14
with
α
R1i αPi ,
1 − eατM
α
−1 − τe−ατM Q1i 2 ατ
R2i .
e 0 − eατM
0 Q1i Q2i Q3i Pi Ai A Pi Ξ
1,1
i
0
Ξ
2,2
3.15
i < 0. Then we have V̇i t, xt In view of Schur complement, 3.3 implies that Ξ
0.
αVi t, xt < 0 for all ψt /
Then during the matched period, by Lemma 2.5, Vi t, xt satisfy
Vi t, xt ≤ e−αt−t0 Vi t0 , xt0 ,
Vi t, xt ≤ e
−αt−t−1 −Δ−1 Vi t−1 Δ−1 , xt−1 Δ−1 ,
t0 ≤ t < t1 ,
t−1 Δ−1 ≤ t < t , 2, 3, . . . .
3.16
When t ∈ Λ2 , we consider the following Lyapunov-Krasovskii functional:
Vij t, xt V1ij t, xt V2ij t, xt V3ij t, xt,
3.17
where
V2ij t, xt V1ij t, xt x tPij xt,
t
βt−s e
x sQ1ij xsds eβt−s x sQ2ij xsds
t
t−τt
t
V3ij t, xt where β > 0.
0
−τM
t
tθ
t−τM
3.18
eβt−s x sQ3ij xsds,
t−τ0
eβt−s ẋ sR1ij ẋsdsdθ −τ0 t
−τM
tθ
eβt−s ẋ sR2ij ẋsdsdθ,
Journal of Applied Mathematics
9
Similarly we have that
V̇ij t, xt − βVij t, xt ≤ ψ tΞi ψt,
3.19
where
R2ij Υ
R1ij Υ
i τM − τ0 Υ
i
Ξ1i τM Υ
i
i
⎡
⎤
β
0
Ξ
P
A
R
0
ij
τ
1ij
i
⎢ 1,1
⎥
1 − e−βτM
⎢
⎥
⎢
⎥
β
β
⎢
⎥
0
⎢ ∗
⎥
R
R
Ξ2,2
2ij
2ij
−βτ
−βτ
−βτ
−βτ
⎢
⎥
0
M
0
M
e
−e
e
−e
⎢
⎥
⎢
⎥
⎢ ∗
⎥
∗
Ξ3,3
0
⎢
⎥
⎢
⎥
⎣
⎦
β
R
∗
∗
∗
−eβτ0 Q3ij − −βτ
2ij
e 0 − e−βτM
3.20
with
Ξ01,1 Q1ij Q2ij Q3ij Pij Ai Ai Pij −
Ξ02,2
−1 − τe
βτM
Q1ij − 2
e−βτ0
β
R1ij − βPij ,
1 − e−βτM
β
R2ij .
− e−βτM
3.21
Through Lemma 2.5, we also have
Vij t, xt ≤ eβt−t Vij t , xt ,
t ≤ t ≤ t Δ , 1, 2, . . . .
3.22
When t ∈ t , t Δ , 1, 2, . . ., we have the relationship Nσt t0 , t < Nσt t0 , t,
and it follows that
V t, xt Vσt−1 Δ−1 σt t ≤ Vσt−1 Δ−1 σt t eβt−t ≤ μ2 Vσt−1 t− eβt−t ≤ μ2 Vσt−1 t−1 Δ−1 eβt−t −αt −t−1 −Δ−1 ≤ μ2 μ1 Vσt−2 Δ−2 t− eβt−t −αt −t−1 −Δ−1 ≤ · · ·
3.23
N t ,t
βT − t0 ,t−αT t0 ,t
≤ μ2 μ1 σt 0 μ−1
.
1 Vσt0 t0 e
From 3.7, we can obtain
T − t0 , tβ − T t0 , tα ≤ −κt − t0 .
3.24
Then through 3.23 and 3.24, we can easily get
t−t0 /Ta
−κ−ln μ2 μ1 /Ta t−t0 Vσt0 e−κt−t0 ≤ μ−1
.
V t, xt ≤ μ−1
1 μ2 μ1
1 Vσt0 e
3.25
10
Journal of Applied Mathematics
By 3.9 and 3.25, then we have
2
λmin Pi xt ≤ V t, xt ≤
μ−1
1
max λmax Pi ∀i∈P
2
τM max λmax Qki k1
τ0 max λmax Q3i ∀i∈P
2
τM
∀i∈P
2
τM
max λmax R1i 2 ∀i∈P
− τ02
max λmax R2i xt0 2 e−κ−ln μ2 μ1 /Ta t−t0 ,
∀i∈P
2
3.26
which means
xt ≤ μ−1/2
1
a1
xt0 e−1/2κ−ln μ2 μ1 /Ta t−t0 ,
b1
3.27
where
2
a1 max λmax Pi ∀i∈P
k1
τM max λmax Qki τ0 max λmax Q3i ∀i∈P
∀i∈P
2
2
τM
τM − τ02
max λmax R1i max λmax R2i ,
∀i∈P
2 ∀i∈P
2
3.28
b1 λmin Pi .
Similarly, when t ∈ Λ1 , we can also have
xt ≤ μ−1/2
1
a2
xt0 e−1/2κ−ln μ2 μ1 /Ta t−t0 ,
b2
3.29
where
2
a2 max λmax Pij τM max λmax Qkij τ0 max λmax Q3ij
∀i,j∈P
k1
∀i,j∈P
2
∀i,j∈P
2
τM
τ 2 − τ0
max λmax R1ij M
max λmax R2ij ,
∀i,j∈P
2 ∀i,j∈P
2
b2 λmin Pij .
3.30
For convenience, let a max{a1 , a2 }, b mini / j,i,j∈P λmin Pi , Pij , through 3.27 and
3.29, we have
ηt ≤ μ−1/2
1
a
ηt e−1/2κ−ln μ2 μ1 /Ta t−t0 .
0
b
3.31
Journal of Applied Mathematics
11
Theorem 3.2. For given scalars 0 ≤ τ0 ≤ τM , α > 0, β > 0, then the system 2.1 is exponentially
stable with L2 -gain, if there exist positive-definite matrices Pi , Pij , Qki , Qkij k 1, 2, 3, and Rli ,
Rlij l 1, 2 such that the following LMIs hold:
⎤
⎡
α
1,1 Ξ
1,5
1,2 −
Σ
R1i
0
Σ
ατ
M
1−e
⎥
⎢
⎥
⎢
α
α
⎥
⎢
2,2 −
⎢ ∗ Ξ
Σ
R
−
R
2,5 ⎥
ατ0 − eατM 2i
ατ0 − eατM 2i
⎥
⎢
e
e
⎥
⎢
⎥
⎢
3,3
Σ1i ⎢ ∗
⎥,
∗
Ξ
0
0
⎥
⎢
⎥
⎢
⎥
⎢
α
−ατ0
⎥
⎢ ∗
∗
∗
−e
Q3i ατ
R
0
2i
⎥
⎢
e 0 − eατM
⎦
⎣
5,5
∗
∗
∗
∗
Σ
⎤
⎡
β
Σ
Ξ
R
0
Σ
1ij
⎢ 1,1 1,2
1,5 ⎥
1 − e−βτM
⎥
⎢
⎥
⎢
⎥
⎢
β
β
⎥
⎢ ∗ Ξ
R
R
Σ
2ij
2ij
⎥
⎢
2,2
2,5
−βτ
−βτ
−βτ
−βτ
e 0 −e M
e 0 −e M
⎥
⎢
⎥
⎢
<0
Σ1i ⎢ ∗
∗
Ξ3,3
0
0 ⎥
⎥
⎢
⎥
⎢
⎥
⎢
⎥
⎢
β
βτ0
⎥
⎢ ∗
Q
−
R
0
∗
∗
−e
3ij
2ij
⎥
⎢
−βτ
−βτ
0
M
e
−e
⎦
⎣
∗
∗
∗
∗
Σ5,5
3.32
3.33
with
1,1 Q1i Q2i Q3i Pi Ai A Pi Σ
i
α
R1i τM Ai R1i Ai
1 − eατM
τM − τ0 Ai R2i Ai Ci Ci ,
1,5 Pi Bi τM A R1i Bi τM − τ0 A R2i Bi C Di ,
Σ
i
i
i
2,5 τM A R1i Bi τM − τ0 A R2i Bi ,
Σ
τi
τi
5,5 τM B R1i Bi τM − τ0 B R2i Bi D Di − γ 2 I,
Σ
i
i
i
Σ1,1 Q1ij Q2ij Q3ij Pij Ai Ai Pij −
β
R1ij τM Ai R1ij Ai
1 − e−βτM
τM − τ0 Ai R2ij Ai Ci Ci ,
Σ1,5 Pij Bi τM Ai R1ij Bi τM − τ0 Ai R2ij Bi Ci Di ,
Σ2,5 τM Aτi R1ij Bi τM − τ0 Aτi R2ij Bi ,
Σ5,5 τM Bi R1ij Bi τM − τ0 Bi R2ij Bi Di Di − γ 2 I.
3.34
12
Journal of Applied Mathematics
Proof. For all nonzero ωt ∈ L2 0, ∞ and a scalar γ > 0, then we establish system 2.1
zt2 ≤ γωt. For convenience, denoting Πt z
t
zt −
with L2 -gain performance 2 γ ω tωt.
When t ∈ t0 , t1 ∪ t−1 Δ−1 , t , k 2, 3, . . ., by the system 2.1, we can obtain
i ϕt.
V̇ t, xt αVi t, xt Πt ϕ tΣ
3.35
From 3.32, we can easily get
V̇i t, ηt αVi t, ηt Πt < 0.
3.36
Integrate this inequality during t0 , t, it is known that
Vi t, xt ≤ e
−αt−t0 Vi t0 , xt0 −
t
e−αt−s Πsds,
t0 ≤ t < t1 ,
t−t0
Vi t, xt ≤ e−αt−t−1 −Δ−1 Vi t−1 Δ−1 , xt−1 Δ−1 −
t
t−1 Δ−1
e−αt−s Πsds,
3.37
t−1 Δ−1 ≤ t < t , 2, 3, . . . .
When t ∈ t , t Δ , 2, 3, . . ., by the system 2.1, by the same way, we can obtain
V̇ t, xt − βVi t, xt Πt ϕ tΣi ϕt < 0.
3.38
Then we have
Vij t, xt ≤ Vij t , xt e
βt−t −
t
t
eβt−s Πsds,
t ≤ t Δ , 1, 2, . . . .
3.39
Journal of Applied Mathematics
13
When t ∈ t , t Δ , 1, 2, . . ., it follows that
V t, xt Vσt−1 Δ−1 σt t eβT
−
t ,t−αT t ,t
−
≤ μ2 Vσt−1 t− eβT t ,t−αT t ,t −
t
−
t
eβT
eβT
−
t ,t−αT t ,t
− μ2
≤ −
t
t0
t−1
t−1 Δ−1
e
Πsds
Πsds
t
−
βT − t ,t−αT t ,t
t ,t−αT t ,t
t
≤ μ2 μ1 Vσt−2 Δ−2 σt−1 t−1 eβT t−1 ,t−αT
t−1 −Δ−1
−
− μ2 μ1
eβT t ,t−αT t ,t Πsds
t
−
Πsds −
t−1 ,t
3.40
t
eβT
−
t ,t−αT t ,t
Πsds ≤ · · ·
t
Nσt s,t Nσt s,t βT − s,t−αT s,t
μ1
e
Πsds
μ2
−
Nσt t0 ,t Nσt t0 ,t
μ1
Vσt0 t0 eβT t ,t−αT t ,t .
μ2
Under the zero initial condition, Let t0 0, 3.40 implies
t
0
Nσt s,t Nσt s,t βT − s,t−αT s,t
μ1
e
Λsds
μ2
≤ 0.
3.41
Integrate 3.41 during 0, ∞, then we can obtain
∞ t
0
eNσt 0,s ln μ2 Nσt 0,s ln μ1 eβT
0
∞
<
e
−
s,t−αT s,t
Nσt 0,s ln μ2 Nσt 0,s ln μ1 0
Πsds dt
∞
∞
−κt−s
Πs
e
dt ds ≤
Πsds ≤ 0.
s
3.42
0
When
∞ t ∈ t0 , t1 ∪ t−1 Δ−1 , t , 2, 3, . . ., by the same mathematical operations,
we have t0 Πsds < 0.
From which we can get zt2 ≤ ωt2 . This proof is completed.
Remark 3.3. If μ1 μ2 0, which implies that Pi Pij P, Qki Qkij Qk , Rli Rlij Rl , i, j ∈ P, by 3.3-3.4 and 3.32-3.33, we have Ta 0, then it requires a
common Lyapunov functional for all subsystems, and the switching signals can be arbitrary.
If μk → ∞ k 1, 2, we get from 3.3-3.4 and 3.32-3.33 that there is no switching, that
is, switching signal will have a great dwell-time on the average.
4. Illustrative Example
In this section, a numerical example is given to illustrate the effectiveness of the obtained
results.
14
Journal of Applied Mathematics
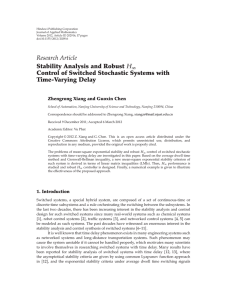
Table 1: Different Ta and τM for α 0.25, β 0.2.
μ1 μ2
Ta
τM
1.0
0.0521
1.2036
1.5
2.1022
1.5415
2.0
5.2454
1.7154
2.5
2
1.5
1
0.5
0
1
2
3
4
5
6
Figure 1: Switching signal with ADT.
Example 4.1. Consider the system 2.1 with parameters as follows:
−1.5 0.3
−1.4 0.8
−2.2 −0.3
,
A2 ,
Aτ1 ,
0 −2.4
0.6 −2.4
0 −1.6
1.2 0
−0.4 0.2
0.2 0.3
−0.35
,
C1 ,
C2 ,
B1 ,
0 −1.8
0.2 0.1
0.1 0.35
0.28
−0.66
−0.35
0.57
B2 ,
D1 ,
D2 .
0.25
−0.15
−0.48
A1 Aτ2
4.1
τ0 is fixed and assumed to be 0.2. The initial condition is assumed to be x0 9, −9 ,
ωt 0.5 sin t. Then by solving the LMIs in Theorem 3.2, different Ta and τM for different
μ1 μ2 , α, and β can be obtained in Table 1. It can be seen that, for the given τ0 , the upper
bounds of the time delay τM and the minimal average dwell-time Ta are dependent on α,
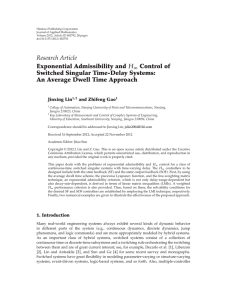
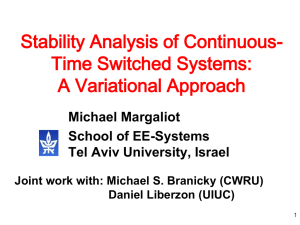
β, and μ1 μ2 . Then the simulation result of the system is shown in Figures 1, 2, and 3. The
switching signal σt with average dwell-time Ta is shown in Figure 1. Figures 2–3 indicate
that the state response of the switched system without asynchronous switching and with
asynchronous switching, respectively.
5. Conclusions
In terms of the LMI approach, the problem of robust stabilization of switched delay systems
with average dwell-time under asynchronous switching has been considered. Two sufficient
Journal of Applied Mathematics
15
10
8
6
4
2
0
−2
−4
−6
−8
−10
0
1
2
3
4
5
6
Figure 2: The state response without asynchronous switching.
10
5
0
−5
−10
−15
−20
−25
−30
−35
−40
0
1
2
3
4
5
6
Figure 3: The state response with asynchronous switching.
conditions are developed to guarantee the global exponential stability of the considered
switched system. At last, a numerical example is provided to demonstrate the effectiveness
and feasibility of the proposed techniques.
Acknowledgment
This work was supported by the Fundamental Research Funds for the Central Universities
103.1.2E022050205.
References
1 V. Lakshmikantham, D. D. Baı̆nov, and P. S. Simeonov, Theory of Impulsive Differential Equations, World
Scientific, Singapore, 1989.
16
Journal of Applied Mathematics
2 S. H. Lee and J. T. Lim, “Stability analysis of switched systems with impulse effects,” in Proceedings
of the IEEE International Symposium on Intelligent Control—Intelligent Systems and Semiotics, pp. 79–83,
September 1999.
3 P. Colaneri, J. C. Geromel, and A. Astolfi, “Stabilization of continuous-time switched nonlinear
systems,” Systems & Control Letters, vol. 57, no. 1, pp. 95–103, 2008.
4 G. Xie and L. Wang, “Periodic stabilizability of switched linear control systems,” Automatica, vol. 45,
no. 9, pp. 2141–2148, 2009.
5 C. Yang and W. Zhu, “Stability analysis of impulsive switched systems with time delays,”
Mathematical and Computer Modelling, vol. 50, no. 7-8, pp. 1188–1194, 2009.
6 V. N. Phat, T. Botmart, and P. Niamsup, “Switching design for exponential stability of a class of
nonlinear hybrid time-delay systems,” Nonlinear Analysis. Hybrid Systems, vol. 3, no. 1, pp. 1–10, 2009.
7 Z. Xiang, C. Liang, and Q. Chen, “Robust L2 -L∞ filtering for switched systems under asynchronous
switching,” Communications in Nonlinear Science and Numerical Simulation, vol. 16, no. 8, pp. 3303–3318,
2011.
8 K. Hu and J. Yuan, “Improved robust H∞ filtering for uncertain discrete-time switched systems,” IET
Control Theory & Applications, vol. 3, no. 3, pp. 315–324, 2009.
9 C. S. Tseng and B. S. Chen, “L∞ -gain fuzzy control for nonlinear dynamic systems with persistent
bounded disturbances,” in Proceedings of the IEEE International Conference on Fuzzy Systems, pp. 25–29,
Budapest, Hungary, 2004.
10 D. Liberzon and A. S. Morse, “Basic problems in stability and design of switched systems,” IEEE
Control Systems Magazine, vol. 19, no. 5, pp. 59–70, 1999.
11 D. Liberzon, Switching in Systems and Control, Birkhäuser, Boston, Mass, USA, 2003.
12 X.-M. Sun, J. Zhao, and D. J. Hill, “Stability and L2 -gain analysis for switched delay systems: a delaydependent method,” Automatica, vol. 42, no. 10, pp. 1769–1774, 2006.
13 X. M. Sun, W. Wang, G. P. Liu, and J. Zhao, “Stability analysis for linear switched systems with timevarying delay,” IEEE Transactions on Systems, Man, and Cybernetics B, vol. 38, no. 2, pp. 528–533, 2008.
14 T.-F. Li, J. Zhao, and G. M. Dimirovski, “Stability and L2 -gain analysis for switched neutral systems
with mixed time-varying delays,” Journal of the Franklin Institute, vol. 348, no. 9, pp. 2237–2256, 2011.
15 D. Y. Liu, S. M. Zhong, and Y. Q. Huang, “Stability and L2 -gain analysis for switched neutral systems,”
in Proceedings of the International Conference on Apperceiving Computing and Intelligence Analysis (ICACIA
’08), pp. 247–250, 2008.
16 L. Xiong, S. Zhong, M. Ye, and S. Wu, “New stability and stabilization for switched neutral control
systems,” Chaos, Solitons & Fractals, vol. 42, no. 3, pp. 1800–1811, 2009.
17 C. Li, T. Huang, G. Feng, and G. Chen, “Exponential stability of time-controlled switching systems
with time delay,” Journal of the Franklin Institute, vol. 349, no. 1, pp. 216–233, 2012.
18 F. Gao, S. Zhong, and X. Gao, “Delay-dependent stability of a type of linear switching systems with
discrete and distributed time delays,” Applied Mathematics and Computation, vol. 196, no. 1, pp. 24–39,
2008.
19 Z. R. Xiang and R. H. Wang, “Robust stabilization of switched non-linear systems with time-varying
delays under asynchronous switching,” Proceedings of the Institution of Mechanical Engineers I, vol. 223,
no. 8, pp. 1111–1128, 2009.
20 L. Zhang and P. Shi, “Stability, L2 -gain and asynchronous H∞ control of discrete-time switched
systems with average dwell time,” IEEE Transactions on Automatic Control, vol. 54, no. 9, pp. 2192–
2199, 2009.
21 W. Xiang, M. Che, C. Xiao, and Z. Xiang, “Stabilization of a class of switched systems with
mismatched switching,” in Proceedings of the International Conference on Measuring Technology and
Mechatronics Automation (ICMTMA ’09), pp. 124–127, Zhangjiajie, China, April 2009.
22 L. Zhang and H. Gao, “Asynchronously switched control of switched linear systems with average
dwell time,” Automatica, vol. 46, no. 5, pp. 953–958, 2010.
23 W. Xiang, J. Xiao, and M. N. Iqbal, “Robust observer design for nonlinear uncertain switched systems
under asynchronous switching,” Nonlinear Analysis. Hybrid Systems, vol. 6, no. 1, pp. 754–773, 2012.
24 Z. Xiang, Y.-N. Sun, and Q. Chen, “Robust reliable stabilization of uncertain switched neutral systems
with delayed switching,” Applied Mathematics and Computation, vol. 217, no. 23, pp. 9835–9844, 2011.
25 Z. R. Xiang and R. H. Wang, “Robust control for uncertain switched non-linear systems with time
delay under asynchronous switching,” IET Control Theory & Applications, vol. 3, no. 8, pp. 1041–1050,
2009.
26 D. Xie and X. Chen, “Observer-based switched control design for switched linear systems with time
delay in detection of switching signal,” IET Control Theory & Applications, vol. 2, no. 5, pp. 437–445,
2008.
Journal of Applied Mathematics
17
27 Z. Ji, X. Guo, S. Xu, and L. Wang, “Stabilization of switched linear systems with time-varying delay
in switching occurrence detection,” Circuits, Systems, and Signal Processing, vol. 26, no. 3, pp. 361–377,
2007.
28 Z. R. Xiang and R. H. Wang, “Robust control for uncertain switched non-linear systems with time
delay under asynchronous switching,” IET Control Theory & Applications, vol. 3, no. 8, pp. 1041–1050,
2009.
29 Z. G. Wu, P. Shi, H. Su, and J. Chu, “Delay-dependent stability analysis for switched neural networks
with time-varying delay,” IEEE Transactions on Systems, Man, and Cybernetics B, vol. 41, no. 6, pp.
1522–1530, 2011.
30 C. Yang and W. Zhu, “Stability analysis of impulsive switched systems with time delays,”
Mathematical and Computer Modelling, vol. 50, no. 7-8, pp. 1188–1194, 2009.
Advances in
Operations Research
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Advances in
Decision Sciences
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Mathematical Problems
in Engineering
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Journal of
Algebra
Hindawi Publishing Corporation
http://www.hindawi.com
Probability and Statistics
Volume 2014
The Scientific
World Journal
Hindawi Publishing Corporation
http://www.hindawi.com
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
International Journal of
Differential Equations
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Volume 2014
Submit your manuscripts at
http://www.hindawi.com
International Journal of
Advances in
Combinatorics
Hindawi Publishing Corporation
http://www.hindawi.com
Mathematical Physics
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Journal of
Complex Analysis
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
International
Journal of
Mathematics and
Mathematical
Sciences
Journal of
Hindawi Publishing Corporation
http://www.hindawi.com
Stochastic Analysis
Abstract and
Applied Analysis
Hindawi Publishing Corporation
http://www.hindawi.com
Hindawi Publishing Corporation
http://www.hindawi.com
International Journal of
Mathematics
Volume 2014
Volume 2014
Discrete Dynamics in
Nature and Society
Volume 2014
Volume 2014
Journal of
Journal of
Discrete Mathematics
Journal of
Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com
Applied Mathematics
Journal of
Function Spaces
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Optimization
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014