Document 10902749
advertisement

Hindawi Publishing Corporation
Journal of Applied Mathematics
Volume 2012, Article ID 593780, 22 pages
doi:10.1155/2012/593780
Research Article
Delay-Dependent Robust Exponential Stability for
Uncertain Neutral Stochastic Systems with Interval
Time-Varying Delay
Weihua Mao,1, 2 Feiqi Deng,1 and Anhua Wan3
1
College of Automation Science and Engineering, South China University of Technology,
Guangzhou 510640, China
2
Department of Mathematics, South China Agricultural University, Guangzhou 510642, China
3
School of Mathematics and Computational Science, Sun Yat-Sen University, Guangzhou 510275, China
Correspondence should be addressed to Anhua Wan, wananhua@mail.sysu.edu.cn
Received 25 April 2012; Revised 27 July 2012; Accepted 30 July 2012
Academic Editor: Jitao Sun
Copyright q 2012 Weihua Mao et al. This is an open access article distributed under the Creative
Commons Attribution License, which permits unrestricted use, distribution, and reproduction in
any medium, provided the original work is properly cited.
This paper discusses the mean-square exponential stability of uncertain neutral linear stochastic
systems with interval time-varying delays. A new augmented Lyapunov-Krasovskii functional
LKF has been constructed to derive improved delay-dependent robust mean-square exponential
stability criteria, which are forms of linear matrix inequalities LMIs. By free-weight matrices
method, the usual restriction that the stability conditions only bear slow-varying derivative of the
delay is removed. Finally, numerical examples are provided to illustrate the effectiveness of the
proposed method.
1. Introduction
Dynamical systems, such as the distributed networks, electric power systems, and communication systems, can be efficiently modeled by neutral stochastic functional differential
equations, which have been extensively studied in recent years, see 1–8 and references
therein. Basically, sufficient conditions on stability of time delay systems are divided into
two categories: delay-dependent and delay-independent cases. It is well known that the
latter is less conservative than the former, especially when the delay is very small. Therefore,
increasing attention has been focused on delay-dependent stability analysis of delay systems
in recent years, see 1–25.
There are unstable systems without delay that can be stabilized with proper nonzero
delay, see 26. Therefore, it is of great significance to consider the stability of systems with
interval time-varying delay, it is a time delay that varies in an interval, in which the lower
bound is not restricted to 0. Recently, interval time-varying delay was introduced and
investigated, see 11–17.
2
Journal of Applied Mathematics
In the past years, as an effective approach of improving the performance of delaydependent stability criteria, free-weighting matrices method has attracted much attention,
see 2–5, 10–12. The mean-square exponential stability was studied for neutral stochastic systems with fixed delays in 2, 3. The global asymptotic stability for a class of neutral stochastic
neural networks was studied in 4. Improved delay-dependent robust stability criteria of
uncertain stochastic systems with interval time-varying delay were proposed in 12.
The usual restriction on derivative of the time-varying delay that τ̇t < 1 in 5–7, 18
brings conservatism, which shows that the resulting conditions can only bear slow-varying
delay. In order to remove this limitation, fast-varying rate condition was studied in 4, 12, 23.
Stability of stochastic differential delay systems with nonlinear impulsive effects is
studied in 24, 25, the equivalent relations are established between the stability of the
stochastic differential delay equations with impulsive effects and that of a corresponding
stochastic differential delay equations without impulses.
To our best knowledge, few works on the robust delay-dependent exponential
stability analysis have been reported for uncertain neutral stochastic distributed system
with fast-varying interval time-varying delay. This paper focuses on the stability analysis
of uncertain neutral stochastic distributed system with interval time-varying delay. By
Lyapunov-Krasovskii functional theory and free-weighting matrices method, a new delaydependent mean-square exponential stability criterion is formulated in terms of LMI, and
the usual restriction of τ̇t < 1 is removed. Finally, three numerical example are given to
illustrate the effectiveness of the proposed method.
Notation 1. Throughout this paper, the notations are standard. If A is a vector or matrix, its
transpose is denoted by AT . P > 0 means that P is a symmetric positive definite matrix.
∗ denotes the symmetry part of a symmetry matrix. indicates terms that can be induced
by symmetry, for example, A AT A and MP MT MP . Denote by λM {·} and
λm {·} the maximum and minimum eigenvalue of a matrix, respectively. Let ρ· denote the
spectral norm of a matrix, while | · | refers to the Euclidean vector norm. Let Ω, F, P be
a complete probability space relative to an increasing family {F}t≥0 of σ algebras Ft ⊂ F
and E{·} the mathematical expectation operator with respect to the probability measure P.
L2 0, ∞ denotes the space of square integrable vector functions over 0, ∞. Let τ > 0 and
C−τ, 0, Rn denote the family of all continuous Rn -valued functions φ on −τ, 0 with the
norm φ sup{|φθ| : −τ θ ≤ 0}. Let L2F0 −τ, 0; Rn be the family of all F0 -measurable
bounded C−τ, 0, Rn -valued random variables ϕ {ϕθ : −τ θ 0}.
2. Preliminaries
Consider the following uncertain Itô-type neutral stochastic system with both discrete and
distributed interval time-varying delays
Σ : dxt − Dxtτ A0 ΔA0 txt A1 ΔA1 txtτ A2 ΔA2 t
B0 ΔB0 txt B1 ΔB1 txtτ B2 ΔB2 t
xt φt,
t ∈ −τ2 , 0,
t
tτ
t
tτ
xsds
2.1
xsds dBt,
2.2
Journal of Applied Mathematics
3
where xt ∈ Rn is the state vector; Bt is a standard scalar Brownian motion defined on a
complete probability space Ω, F, P, we assume E{dBt} 0, E{d2 Bt} dt. φt is any
given initial data in L2F0 −τ, 0; Rn . Denote ηt xt − Dxtτ , tτ t − τt, tτ1 t − τ1 , tτ2 t − τ2 , τt is time-varying delays, satisfying
τ̇t τ < ∞,
0 τ1 τt τ2 < ∞,
δ τ2 − τ1 .
2.3
Remark 2.1. It should be noted that system 2.1-2.2 encompasses many state space
models of neutral delay systems, which can be used to represent many important physical
systems such as a large class of distributed networks containing lossless transmission lines,
population ecology, heat exchangers, wind tunnel, and water resources systems see 27–
29 and the references therein. For example, signal transformation cannot be finished in
time due to the finite signal propagation speed in distributed networks containing lossless
transmission lines, or to the finite switching speed of amplifiers in electronic networks, so the
models only depending on the discrete time delays are not complete, the more exact models
should include the distributed time delays, and the delays are found both in the states and in
the derivatives of the states.
Remark 2.2. It is worth pointing out that, when a time-varying delay appears, it is usually
assumed that τ̇t < 1 is satisfied and the lower bound of the delay is restricted to be zero
in the literature 5, 7, 8 and so forth. However, in this paper, we only require τ̇t τ, in
addition, the range of delay may vary in a range for which the lower bound is not restricted
to be zero. Therefore, the time-varying delay in this paper is more general.
Ai , Bj , i, j 0, 1, 2, are known real constant matrices of appropriate dimensions;
ΔAi , ΔBj , i, j 0, 1, 2, are unknown matrices representing time-varying parameter uncertainties. For the sake of convenience, we assume that the uncertainties are norm-bounded
and can be described as
ΔAi t ΔBi t GFt Si Ti ,
2.4
where Si , Ti , i 0, 1, 2, are known real constant matrices, Ft is an unknown real timevarying function with appropriate dimension satisfying
F T tFt I.
2.5
It is assumed that the elements of Ft are Lebesgue measurable. Throughout this paper, the
following assumption, definitions, and lemmas will be used to develop our results.
Assumption 2.3. The difference operator matrix D satisfies D < 1.
Definition 2.4 see 1. The neutral stochastic delay system 2.1-2.2 is said to be meansquare exponentially stable if there is a pair of positive constants α, β such that
E xT txt αe−βt sup E φθ .
−τ2 θ0
2.6
4
Journal of Applied Mathematics
Lemma
2.5 see 30.
r If there exists a vector function vt : 0, r →
r T
v
sP
vs
ds
and
vs ds are well defined, then the following inequality:
0
0
r
Rn such that
r
T r
vsds P
vsds r vT sP vsds
0
0
2.7
0
holds for any pair of symmetric positive definite matrix P ∈ R n×n and r > 0.
Lemma 2.6 see 31. For any vectors x, y ∈ Rn , matrices A, D, E, P , and F are real matrices of
appropriate dimensions with P > 0 and F T F I, the following inequalities hold:
1 2xT DFEy −1 xT DDT x yT EET y;
2 for any scalar > 0 such that P − DDT > 0, then A DFET P −1 A DFE −1 ET E AT P − DDT −1 A;
3 2xT y xT P −1 x yT P y.
3. Main Results
In this section, a robustly stochastically exponentially stable criterion for the uncertain linear
neutral stochastic distributed delayed system Σ will be established by applying the Lyapunov-Krasovskii theory and free-weighting matrices method.
For convenience, define a new state variable
ft A0 ΔA0 txt A1 ΔA1 txtτ A2 ΔA2 t
t
tτ
xsds
3.1
and a new perturbation variable
gt B0 ΔB0 txt B1 ΔB1 txtτ B2 ΔB2 t
t
tτ
xsds.
3.2
Then, system 2.1 becomes
dxt − Dxtτ ftdt gtdBt.
3.3
Journal of Applied Mathematics
5
Applying Leibniz-Newton formula to 2.1, it yields the following zero equations which will
be used in our main result:
2ξ tN xt − Dxtτ − xtτ Dxtτ − τtτ −
T
t
tτ
fsds −
2ξ tH xtτ1 − Dxtτ1 − τtτ1 − xtτ Dxtτ − τtτ −
T
2ξ tM xtτ − Dxtτ − τtτ − xtτ2 Dxtτ2 − τtτ2 −
T
tτ
1
tτ
tτ
tτ2
t
tτ
gsdBs 0,
fsds −
fsds −
tτ
1
tτ
tτ
tτ2
gsdBs 0,
gsdBs 0,
3.4
where N, H, and M are any matrices with appropriate dimensions, and
ξ t xT t, xT tτ ,
T
1
τ2
t
tτ
xT sds, xT tτ1 , xT tτ2 ,
3.5
xT tτ1 − τtτ1 , xT tτ2 − τtτ2 , xT tτ − τtτ .
With zero equations 3.4 above, we obtain the following theorem.
Theorem 3.1. For given scalars 0 τ1 τ2 and τ, system Σ is robustly stochastically
exponentially stable for all time-varying delays satisfying 2.3 and for all admissible uncertainties
satisfying 2.4 and 2.5, if there exist symmetric positive definite matrices P > 0, Ri > 0, i 0, 1, 2, . . . , 10, scalars j , j 1, 2, 3 and any matrices N, H, M with appropriate dimensions, such
that the following LMI 3.6 holds:
Φ
Φ1 Φ2
∗ Φ3
where
⎞
Θ P G V1T Z 0 V2T U 0
⎜ ∗ − I 0
0
0
0 ⎟
⎟
⎜
1
⎟
⎜
−Z ZG
0
0 ⎟
⎜∗ ∗
Φ1 ⎜
⎟,
⎜∗ ∗
0 ⎟
∗ −2 I 0
⎟
⎜
⎝∗ ∗
∗
∗
−U UG ⎠
∗ ∗
∗
∗
∗
−3 I
⎛
< 0,
3.6
6
Journal of Applied Mathematics
Φ2 N H M N H M ,
Φ3 diag −R7 −R8 −R7 − R8 −R9 −R10 −R9 − R10 .
Θ Γ Ψ ΨT ,
V1 A0 A1 A2 0 0 0 0 0 ,
V2 B0 B1 B2 0 0 0 0 0 ,
T
P P −P D 0 0 0 0 0 0 ,
T
N N T , 0, 0, 0, 0, 0 ,
Z τ2 R7 δR8 ,
T
H H T , 0, 0, 0, 0, 0 ,
U P τ2 R9 δR10 ,
T
M MT , 0, 0, 0, 0, 0 ,
3.7
with
⎛
⎞
Γ11 Γ12 Γ13 0
0
0 0 0
⎜ ∗ Γ22 Γ23 0
0
0 0 0 ⎟
⎜
⎟
⎜∗ ∗ Γ
0
0
0 0 0 ⎟
33
⎜
⎟
⎜ ∗ ∗ ∗ −R
0
0 0 0 ⎟
⎜
⎟
1
Γ⎜
⎟,
⎜∗ ∗ ∗
∗ −R3 0 0 0 ⎟
⎜
⎟
⎜∗ ∗ ∗
∗
∗ Γ66 0 0 ⎟
⎜
⎟
⎝∗ ∗ ∗
∗
∗
∗ Γ77 0 ⎠
∗ ∗ ∗
∗
∗
∗ ∗ Γ88
Ψ N M − H − ND I 0 H −M −HD MD N H − MD ,
3.8
Γ11 P A0 AT0 P R1 R2 R3 τ2 R0 1 2 ST0 S0 3 T0T T0 ,
Γ12 P A1 − AT0 P D 1 2 ST0 S1 3 T0T T1 ,
Γ13 P A2 1 2 ST0 S2 3 T0T T2 ,
Γ22 R4 R5 R6 − 1 − τR2 − DT P A1 − AT1 P D 1 2 ST1 S1 3 T1T T1 ,
Γ23 − DT P A2 1 2 ST1 S2 3 T1T T2 ,
Γ66 R4 ,
Γ77 R6 ,
Γ33 −τ2 R0 1 2 ST2 S2 3 T2T T2 ,
Γ88 1 − τR5 .
Proof. Choose a Lyapunov-Krasovskii functional candidate as
V t, ξt 4
Vi t, ξt ,
i0
where
V0 t, xt xt − Dxtτ T P xt − Dxtτ ;
V1 t, xt t tτ1
xs
xs − τs
T R1 0
0 R4
xs
ds
xs − τs
3.9
Journal of Applied Mathematics
V2 t, xt V4 t, xt t T xs
R2 0
xs
ds
xs − τs
xs − τs
0 R5
tτ
t t
tτ2
V3 t, xt τ2
7
tτ2
xs
xs − τs
T R3 0
xs
ds;
xs − τs
0 R6
s − t − τ2 xT sR0 xsds;
0 t
−τ2
tθ
0 t
−τ2
tθ
f T sR7 fsds dθ δ
−τ1 t
−τ2
tθ
f T sR8 fsds dθ;
−τ1 t
tr g T sR9 gs ds dθ tr g T sR10 gs ds dθ.
−τ2
tθ
3.10
According to Itô’s differential formula 1, the stochastic differential is
dV t, xt LV t, xt dt 2xt − Dxtτ T P gtdBt,
3.11
where
LV t, xt dt 2xt − Dxtτ T P ft gtT P gt 4
V̇i t, xt .
i1
Direct computations give
V̇1 t, xt xT tR1 R2 R3 xt − xT tτ1 R1 xtτ1 − xT tτ2 R3 xtτ2 xT tτ R4 R5 R6 − 1 − τR2 xtτ − xT tτ1 − τtτ1 R4 xtτ1 − τtτ1 − 1 − τxT tτ − τtτ R5 xtτ − τtτ − xT tτ2 − τtτ2 R6 xtτ2 − τtτ2 by τ̇t τ
3.12
8
Journal of Applied Mathematics
V̇2 t, xt τ2 xT tR0 xt −
t
tτ
xT sR0 xsds
≤ τ2 x tR0 xt −
T
1
τ2
t
tτ
T
xsds
τ2 R0 1
τ2
t
tτ
xsds ;
by Lemma 2.5,
V̇3 t, xt f T tT τ22 R7 δ2 R8 ft
− τ2
t
tτ2
tτ
T
f s R7 fsds − δ
T
V̇4 t, xt tr g T tT τ2 R9 δR10 gt
−
t
tτ2
1
tτ2
f T sT R8 fsds;
tτ 1
tr g T sT R9 gs ds −
tr g T sT R10 gs ds.
tτ2
3.13
By 1 of Lemma 2.6, for any scalar 1 > 0, we have
2xt − Dxtτ T P ft 2ξT tP V1 ξt 2ξT tP GFtV3 ξt
≤ 2ξT tP V1 ξt 1−1 ξT tP G 1 ξT tV3T ,
3.14
and by 2 of Lemma 2.6, for any 2 > 0 satisfying τ22 R7 δ2 R8 −1 − 2−1 GGT > 0, we have
f T t τ22 R7 δ2 R8 ft ξT tV1 GFtV3 T Z
≤ξ
T
tV1T
Z
−1
−
2−1 GGT
−1
3.15
2 ξ
T
tV3T
.
For any scalar 3 > 0 satisfying τ2 R9 δR10 −1 − 3−1 GGT > 0, the following inequality holds:
tr g T tP τ2 R9 δR10 gt g T tP τ2 R9 δR10 gt
ξT tV2 GFtV4 T U
−1
≤ ξT tV2T U−1 − 3−1 GGT
3 ξT tV4T .
3.16
Journal of Applied Mathematics
9
In addition, it follows from 3.4, 3 of Lemma 2.6 and Lemma 2.5 that
t
−2ξ tN
T
fsds ξ
tτ
T
tNR−1
7
t
tτ
ξT tNR−1
7 τ2
−2ξ tH
T
tτ
tτ
− 2ξT tM
1
fsds ξ
T
ξ
T
tτ
tτ2
≤ ξ tMR7 R8 T
−2ξ tN
−2ξ tH
T
tτ
tτ
tτ
−2ξT tM
1
tHR−1
8
−1
ξ tMR7 R8 t
−1
gsdBs ≤ ξ
gsdBs ≤ ξ
tτ
tτ2
t
f T sR7 fsds,
tτ
t
τ
1
tτ
δ
tτ
R7 1
tτ
T
fsds
R8 f T sR8 fsds,
fsds
T
T
tHR−1
8
T
fsds
T
T
t
τ
tτ
tτ2
tτ2
T
fsds
R7 R8 f T sτ2 R7 δR8 fsds,
tNR−1
9
tHR−1
10
t
T
tτ
t
τ
tτ
1
gsdBs
R9 ,
T
gsdBs
R10 ,
gsdBs ≤ ξT tMR9 R10 −1 t
τ
tτ2
T
gsdBs
R9 R10 .
3.17
Note that
⎧
⎨ t
E
gsdBs
⎩ tτ
⎧
⎨ tτ1
E
gsdBs
⎩ tτ
T
⎫
⎬ t R9 tr g T sR9 gs ds,
⎭
tτ
T
⎫
⎬ tτ1 g T sR10 gs ds,
R10 ⎭
tτ
3.18
10
⎧
⎨ tτ
E
gsdBs
⎩ tτ
2
Journal of Applied Mathematics
⎫
T
⎬ tτ 3.19
g T sR9 R10 gs ds.
R9 R10 ⎭
tτ
2
Applying inequalities from 3.13 to 3.19 to 3.12, it yields
3.20
Lω V t, ξt ξT tΛξt,
where
−1
−1
T
Λ Θ 1−1 P G P G V1T Z−1 − 2−1 GGT V1 V2T U−1 − 3−1 GGT V2
−1
−1
−1
−1
T
N T H R−1
MT
N R−1
7 R9
8 R10 H M R7 R8 R9 R10 3.21
with Θ being defined in Theorem 3.1.
By applying the Schur complement to 3.6 results in Λ < 0, which implies
LV t, xt ξT tΛξt < 0
3.22
LV t, xt −νξtξt −νxT txt,
3.23
therefore,
where ν λm {−Λ}. Now, integrating both sides of 3.23 from 0 to t > 0, and then taking the
expectation, we obtain
t
t st
E V s, xs |s0 E
LV s, xs ds −ν E xT sxs ds.
0
3.24
0
On the other hand, it follows from 3.9 that
E{V t, xt } ≥ E ηT tP ηt ≥ λm {P }E ηT tηt .
3.25
Therefore, by 3.24 and 3.25
t T
λm {P }E η tηt E{V 0, x0 } − ν E xT sxs ds.
0
3.26
Journal of Applied Mathematics
11
Since ρD < 1, choose > 0 such that eτ2 ρ2 D < 1, which implies ρ2 D < e−τ2 < 1, denote
0 e−τ2 . Let σ be any nonnegative real number. For all 0 t σ, it follows from 1 of
Lemma 2.6 that
E ηT tηt ≥ ExT txt − 2E xT tDxtτ ExT tτ DT Dxtτ ≥ 1 − 0 ExT txt − 0−1 − 1 ExT tτ DT Dxtτ .
3.27
Hence
ExT txt 1 1
E ηT tηt E xT tτ DT Dxtτ .
1 − 0
0
3.28
By 3.25, 3.27, and 3.28, we then derive that for all 0 t σ,
ExT txt 1
1
sup E ηT tηt sup E xT tτ DT Dxtτ 1 − 0 0tσ
0 0tσ
λ {D
D}
1
M
sup E ηT tηt sup E xT txt
0
1 − 0 0tσ
−τ2 tσ
D2
1
sup E ηT tηt sup E xT txt .
0 −τ2 tσ
1 − 0 0tσ
3.29
However, this holds for all −τ t 0 as well. Therefore,
sup E xT txt −τ2 tσ
ρ2 D
1
sup E ηT tηt sup E xT txt .
0 −τ2 tσ
1 − 0 0tσ
3.30
Since ρ2 D < 0 and P > 0, we obtain that
1 − 0 0 − ρ2 D
sup E xT txt sup E ηT tηt .
0
−τ2 tσ
0tσ
3.31
By supremum property,
sup E xT txt ≥ sup E xT txt .
−τ2 tσ
0tσ
3.32
By 3.31 and 3.32,
1 − 0 0 − ρ2 D
sup E xT txt sup E ηT tηt .
0
0tσ
0tσ
3.33
12
Journal of Applied Mathematics
For any t ≥ 0, it follows from 3.26, 3.33 and σ being an arbitrary nonnegative real number
that
t T
sup E x txt μE{V 0, x0 } − νμ E xT sxs ds.
t≥0
3.34
0
Since σ is an arbitrary nonnegative number, we have
t E xT txt μE{V 0, x0 } − νμ E xT sxs ds,
3.35
∀t ≥ 0.
0
Then, applying Gronwall-Bellman lemma to 3.35, it yields
E xT txt μE{V 0, x0 }e−νμt .
3.36
Note that there exists a scalar α > 0 such that
μE{V 0, x0 } α sup E φθ .
3.37
−τ2 θ0
Denote μ 0 1 − 0 0 − ρ2 Dλm {P }−1 > 0, β νμ > 0, then we have
E xT txt αe−βt sup E φθ .
3.38
−τ2 θ0
By Definition 2.4, system Σ is robustly stochastically mean-square exponentially stable.
Remark 3.2. Theorem 3.1 provides a delay-dependent condition with a new LyapunovKrasovskii functional, which makes full use of the relationship among the time-varying delay,
its upper and lower bounds, and their difference. It is noted that this condition is obtained by
free-weighting matrices techniques; model transformation is not resorted to in the derivation
of Theorem 3.1. Thus, the conservatism caused by model transformation will be reduced.
If τ1 τ2 τ0 , then τ 0, τt τ0 . Applying Leibniz-Newton formula to 2.1, it
yields the following zero equations:
2ζ tL xt − Dxt − τ0 − xt − τ0 Dxt − 2τ0 −
T
t
tτ0
fsds −
t
tτ0
gsdBs 0,
3.39
where L is any matrices with appropriate dimension, and
1
ζ t x t, x t − τ0 ,
τ0
T
T
T
t
t−τ0
x sds, x t − 2τ0 .
T
T
With zero equations 3.39 above, we obtain the following corollary.
3.40
Journal of Applied Mathematics
13
Corollary 3.3. For given constant delay τ0 , system Σ is robustly stochastically exponentially stable
for all admissible uncertainties satisfying 2.4 and 2.5, if there exist symmetric positive definite
matrices P0 > 0, Z0 > 0, Z1 > 0, Z2 > 0, Z3 > 0, Z4 > 0, scalars i , i 1, 2, 3 and any matrices L
with appropriate dimensions such that the following LMI 3.41 holds:
⎛
⎞
Ξ P 0 G τ02 W1T Z3
0
τ0 W2T Z4
0
L
L
⎜∗ −1 I
0
0
0
0
0
0 ⎟
⎜
⎟
⎜∗ ∗
2
2
0
0
0
0 ⎟
−τ0 Z3 τ0 Z3 G
⎜
⎟
⎜
⎟
0
0
0
0 ⎟
∗
−2 I
⎜∗ ∗
Ω⎜
⎟ < 0,
⎜∗ ∗
0 ⎟
∗
∗
−τ0 Z4 τ0 Z4 G 0
⎜
⎟
⎜∗ ∗
0
0 ⎟
∗
∗
∗
−3 I
⎜
⎟
⎝∗ ∗
∗
∗
∗
∗
−Z3 0 ⎠
∗ ∗
∗
∗
∗
∗I
0 −Z4
3.41
where
Ξ Π Υ ΥT ,
W1 A0 A1 A2 0 ,
T
P 0 P0 −DP0 0 0 ,
W 2 B0 B1 B2 0 ,
T
L LT 0 0 0 ,
3.42
with
⎛
⎞
Π11 Π12 Π13 0
⎜ ∗ Π22 Π23 0 ⎟
⎟,
Π⎜
⎝ ∗
∗ Π33 0 ⎠
∗
∗
∗ −Z2
Υ L −LD I 0 LD ,
Π11 P0 A0 AT0 P0 Z1 Z2 τ0 Z0 1 2 ST0 S0 3 T0T T0 ,
Π12 P0 A1 − AT0 DP0 1 2 ST0 S1 3 T0T T1 ,
3.43
Π13 P0 A2 1 2 ST0 S2 3 T0T T2 ,
Π22 − Z1 − P0 DT A1 − AT1 DP0 1 2 ST1 S1 3 T1T T1 ,
Π23 − P0 DT A2 1 2 ST1 S2 3 T1T T2 ,
Π33 −τ0 Z0 1 2 ST2 S2 3 T2T T2 .
If A2 B2 0, ΔA2 t ΔB2 t 0, D 0, then, system 2.1 becomes
dxt ftdt gtdBt,
3.44
where
ft A0 ΔA0 txt A1 ΔA1 txtτ ,
gt B0 ΔB0 txt B1 ΔB1 txtτ .
3.45
14
Journal of Applied Mathematics
Applying Leibniz-Newton formula to 3.44, it yields the following zero equations which will
be used in our main result
t
t
T
'
(
fsds −
gsdBs 0,
2ξ tN xt − xtτ −
tτ
tτ
tτ
tτ
1
1
T
'
(
2ξ tH xtτ1 − xtτ −
fsds −
gsdBs 0,
'T
( xtτ − xtτ2 −
2ξ tM
tτ
tτ
tτ
tτ
tτ2
fsds −
tτ2
3.46
gsdBs 0,
where N, H, and M are any matrices with appropriate dimensions, and
ξ'T t xT t, xT tτ , xT tτ1 , xT tτ2 .
3.47
With zero equation 3.46 above, we obtain the following corollary.
Corollary 3.4. For given scalars 0 τ1 τ2 and τ, system 3.44 is robustly stochastically
exponentially stable for all time-varying delays satisfying 2.3 and for all admissible uncertainties
satisfying 2.4 and 2.5, if there exist symmetric positive definite matrices P > 0, Ri > 0, i ( H,
(M
( with appropriate dimensions, such that
1, 2, . . . , 10, scalars j , j 1, 2, 3 and any matrices N,
the following LMI 3.48 holds:
' Φ
'1
Φ
∗
'2
Φ
'3
Φ
< 0,
3.48
where
⎛
Θ P' G
⎜ ∗ − I
⎜
1
⎜
∗
∗
⎜
'1 ⎜
Φ
⎜∗ ∗
⎜
⎝∗ ∗
∗ ∗
'2 N
)
Φ
⎞
V'1T Z 0 V'2T U 0
0
0
0
0 ⎟
⎟
⎟
−Z ZG
0
0 ⎟
⎟,
0 ⎟
∗ −2 I 0
⎟
∗
∗
−U UG ⎠
∗
∗
∗
−3 I
) M
) N
) H
) M
) ,
H
' 3 diag −R7 −R8 −R7 −R8 −R9 −R10 −R9 −R10 ,
Φ
' Γ
' Ψ
' T,
'Ψ
Θ
V'1 A0 A1 0 0 ,
V'2 B0 B1 0 0 ,
T
P' P 0 0 0 ,
T
) N
(T , 0, 0, 0, 0, 0 ,
N
Z τ2 R7 δR8 ,
T
) H
(T , 0, 0, 0, 0, 0 ,
H
U P τ2 R9 δR10 ,
T
) M
(T , 0, 0, 0, 0, 0 ,
M
3.49
Journal of Applied Mathematics
15
with
⎞
⎛
' 12 0
' 11 Γ
0
Γ
⎟
⎜
' 22 0
∗ Γ
0 ⎟
'⎜
Γ
⎟,
⎜
⎝ ∗ ∗ −R1 0 ⎠
∗ ∗
∗ −R3
' N
( M
(−H
(−N
( H
( −M
( ,
Ψ
3.50
' 11 P A0 AT P R1 R2 R3 1 2 ST S0 3 T T T0 ,
Γ
0
0
0
' 12 P A1 1 2 ST S1 3 T T T1 ,
Γ
0
0
' 22 −1 − τR2 1 2 ST S1 3 T T T1 .
Γ
1
1
If τ1 τ2 τ0 , A2 B2 0, ΔAi t ΔBi t 0, i 0, 1, 2, then τ 0, τt τ0 and
2.1 becomes
*
dxt − Dxt − τ0 ftdt
g* tdBt,
3.51
where
* A0 xt A1 xt − τ0 ,
ft
g* t B0 xt B1 xt − τ0 .
3.52
Applying Leibniz-Newton formula to 3.51, it yields the following zero equations
t
t
*
*
g* sdBs 0,
2ς tL xt − Dxt − τ0 − xt − τ0 Dxt − 2τ0 −
fsds −
T
tτ0
tτ0
3.53
* is any matrices with appropriate dimension, and
where L
ςT t xT t, xT t − τ0 , xT t − 2τ0 .
3.54
With zero equations 3.53 above, we obtain the following corollary.
Corollary 3.5. For given constant delay τ0 , system 3.51 is robustly stochastically exponentially
stable, if there exist symmetric positive definite matrices P0 > 0, Z1 > 0, Z2 > 0, Z3 > 0, Z4 > 0, any
* with appropriate dimensions, such that the following LMI 3.41 holds:
matrices L
⎛
⎞
) T Z3 τ0 W
) T Z4 L
'
'
' τ 2W
Ξ
L
0
2
1
⎜∗ −τ 2 Z
0
0
0 ⎟
⎜
⎟
0 3
⎜
⎟
' ⎜∗
Ω
0
0 ⎟ < 0,
∗
−τ0 Z4
⎜
⎟
⎝∗
∗
∗
−Z3 0 ⎠
∗
∗
∗
∗ −Z4
3.55
16
Journal of Applied Mathematics
where
)1 A0 A1 0 ,
W
' Π
' Υ
' Υ
' T,
Ξ
T
' L
*T 0 0 ,
L
)2 B0 B1 0 ,
W
3.56
with
⎞
' 12 0
' 11 Π
Π
' ⎜
' 22 0 ⎟
Π
⎠,
⎝ ∗ Π
∗
∗ −Z2
⎛
' L
* −LD
*
*
Υ
,
I LD
' 11 P0 A0 AT P0 Z1 Z2 ,
Π
0
3.57
' 12 P0 A1 − AT DP0 ,
Π
0
' 22 −Z1 − P0 DT A1 − AT DP0 .
Π
1
Deterministic systems may be regarded as special class of stochastic systems, let Bi 0, ΔBi 0, i 0, 1, 2, then system 2.1-2.2 becomes the following uncertain neutral system
with both discrete and distributed interval time-varying delays
Σ0 : ẋt − Dẋtτ A0 ΔA0 txt A1 ΔA1 txtτ A2 ΔA2 t
xt φt,
t
t ∈ −τ2 , 0.
tτ
xsds,
3.58
3.59
Applying Leibniz-Newton formula to 3.58, it yields the following zero equations which will
be used in our main result:
2ξ tN xt − Dxtτ − xtτ Dxtτ − τtτ −
T
t
tτ
fsds 0,
2ξ tH xtτ1 − Dxtτ1 − τtτ1 − xtτ Dxtτ − τtτ −
T
2ξ tM xtτ − Dxtτ − τtτ − xtτ2 Dxtτ2 − τtτ2 −
T
tτ
1
tτ
tτ
tτ2
fsds 0,
3.60
fsds 0,
where N, H, and M are any matrices with appropriate dimensions, and ξt is defined in
3.5. With zero equations 3.60 above, we obtain
Corollary 3.6. For given scalars 0 τ1 τ2 and τ, system Σ0 is robustly stochastically
exponentially stable for all time-varying delays satisfying 2.3 and for all admissible uncertainties
satisfying 2.4 and 2.5, if there exist symmetric positive definite matrices P > 0, Ri > 0,
Journal of Applied Mathematics
17
i 0, 1, 2, . . . , 8, scalars j , j 1, 2, 3 and any matrices N, H, M with appropriate dimensions, such
that the following LMI 3.61 holds:
⎞
⎛
Θ P G V1T Z 0
N H
M
⎟
⎜ ∗ − I 0
0
0
0
0
1
⎟
⎜
⎟
⎜∗ ∗
−Z ZG 0
0
0
⎟
⎜
⎟
⎜
Φ ⎜∗ ∗
⎟ < 0,
0
0
∗ −2 I 0
⎟
⎜
⎟
⎜∗ ∗
0
0
∗
∗
−R
7
⎟
⎜
⎠
⎝∗ ∗
0
∗
∗
∗ −R8
∗ ∗
∗
∗
∗
∗ −R7 − R8
where
Θ Γ Ψ ΨT ,
V1 A0 A1 A2 0 0 0 0 0 ,
T
P P −P D 0 0 0 0 0 0 ,
Z τ2 R7 δR8 ,
3.61
V2 B0 B1 B2 0 0 0 0 0 ,
U P τ2 R9 δR10 ,
3.62
with
⎛
⎞
Γ11 Γ12 Γ13 0
0
0 0 0
⎜ ∗ Γ22 Γ23 0
0
0 0 0 ⎟
⎜
⎟
⎜∗ ∗ Γ
0
0
0 0 0 ⎟
33
⎜
⎟
⎜ ∗ ∗ ∗ −R
0
0 0 0 ⎟
⎜
⎟
1
Γ⎜
⎟,
⎜∗ ∗ ∗
∗ −R3 0 0 0 ⎟
⎜
⎟
⎜∗ ∗ ∗
∗
∗ Γ66 0 0 ⎟
⎜
⎟
⎝∗ ∗ ∗
∗
∗
∗ Γ77 0 ⎠
∗ ∗ ∗
∗
∗
∗ ∗ Γ88
Ψ N M − H − ND I 0 H −M −HD MD N H − MD ,
3.63
Γ11 P A0 AT0 P R1 R2 R3 τ2 R0 1 2 ST0 S0 3 T0T T0 ,
Γ12 P A1 − AT0 P D 1 2 ST0 S1 3 T0T T1 ,
Γ13 P A2 1 2 ST0 S2 3 T0T T2 ,
Γ22 R4 R5 R6 − 1 − τR2 − DT P A1 − AT1 P D 1 2 ST1 S1 3 T1T T1 ,
Γ23 − DT P A2 1 2 ST1 S2 3 T1T T2 ,
Γ66 − R4 ,
Γ77 −R6 ,
Γ33 −τ2 R0 1 2 ST2 S2 3 T2T T2 ,
Γ88 −1 − τ R5 .
Proof. Choose a Lyapunov-Krasovskii functional candidate as
V t, ξt 3
Vi t, ξt ,
i0
where Vi t, ξt , i 0, 1, 2, 3 are defined in 3.9. It can be concluded from Theorem 3.1.
3.64
18
Journal of Applied Mathematics
If τ1 τ2 τ0 , A2 0, Bi ΔAi t ΔBi t 0, i 0, 1, 2, then τ 0, τt τ0 and
2.1 becomes
ẋt − Dẋt − τ0 A0 xt A1 xt − τ0 .
3.65
Applying Leibniz-Newton formula to 3.65, it yields the following zero equations:
t
*
*
fsds 0,
2ς tL xt − Dxt − τ0 − xt − τ0 Dxt − 2τ0 −
T
tτ0
3.66
* A0 xt A1 xt − τ0 , and
* is any matrices with appropriate dimension, ft
where L
ςT t xT t, xT t − τ0 , xT t − 2τ0 .
3.67
With zero equations 3.66 above, we obtain the following corollary.
Corollary 3.7. For given constant delay τ0 , system 3.65 is robustly stochastically exponentially
stable, if there exist symmetric positive definite matrices P0 > 0, Z1 > 0, Z2 > 0, Z3 > 0, Z4 > 0, and
* with appropriate dimensions, such that the following LMI 3.68 holds:
any matrices L
⎞
) T Z3 Ľ
' τ 2W
Ľ
Ξ
0
1
⎟
⎜
∗ −τ02 Z3
0
0 ⎟
' ⎜
Ω
⎟ < 0,
⎜
⎝∗
∗
−Z3 0 ⎠
∗
∗
∗ −Z4
⎛
3.68
where
' Π
' Υ
' Υ
' T,
Ξ
)1 A0 A1 0 ,
W
T
*T 0 0 ,
Ľ L
3.69
with
⎞
' 12 0
' 11 Π
Π
' ⎜
' 22 0 ⎟
Π
⎠,
⎝ ∗ Π
∗
∗ −Z2
⎛
' L
* −LD
*
*
Υ
,
I LD
' 11 P0 A0 AT P0 Z1 Z2 ,
Π
0
' 22 −Z1 − P0 DT A1 − AT DP0 .
Π
1
' 12 P0 A1 − AT DP0 ,
Π
0
3.70
Journal of Applied Mathematics
19
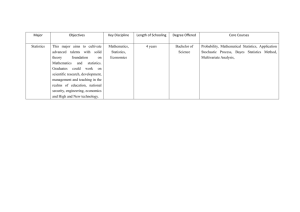
0.15
0.1
0.05
0
−0.02
0
10
20
30
40
50
60
Time (s)
x21
x22
Figure 1: Mean-square exponential stability of the neutral stochastic system with interval time-varying
delay.
Table 1: Allowable lower bounds and upper bounds for different τ.
τ
τ2
τ1
δ
0.3
1.5970
0.1500
1.4470
0.6
1.6724
0.3000
1.3724
1.0
1.8719
0.5000
1.3719
1.2
1.9717
0.6000
1.3717
1.5
2.1215
0.7500
1.3715
1.52
2.1315
0.7600
1.3715
4. Numerical Examples
Example 4.1. Consider the uncertain neutral linear stochastic time-varying delay system Σ
with
A0 −2.0 0.0
,
0.0 −1.9
B0 −0.1 I,
A1 −1.0 0.0
,
−1.0 −1.0
B1 0.2I,
A2 −I,
B2 0.1I,
G 0.1I,
D −0.5I,
Si Ti 0.1I,
4.1
i 0, 1, 2,
and τt α exp−1/1 t2 , 0 α 2.1315, set α 1, in this situation, τ1 0.3679, τ2 T
1, τ 0.7358, δ 0.6321. Set φθ x1T θ, x2T θ , where x1 θ, x2 θ are random initial
values with zero mean and variance 1.0, and Ft sint, the trajectories of x1 t and x2 t
are shown in Figure 1. According to Theorem 3.1, the lower bounds and the upper bounds on
the time delay to guarantee the system is robustly stochastically mean-square exponentially
stable are listed in Table 1.
Example 4.2. Consider the uncertain linear stochastic system 3.44 with
A0 −2.0 0.0
,
0.0 −0.9
B0 B1 0,
A1 G 0.2I,
−1.0 0.0
,
−1.0 −1.0
Si Ti I,
4.2
i 0, 1, 2.
20
Journal of Applied Mathematics
Table 2: Allowable upper bounds of τ2 for different τ.
τ
Yan et al. 15
Corollary 3.4
0.3
0.7288
0.9012
0.5
0.5252
0.7498
0.9
0.1489
0.5640
Table 3: Allowable upper bounds of τ2 for different c.
c
Fridman and Shaked 19
Corollary 3.7
0
4.47
4.47
0.1
3.49
4.05
0.3
2.06
3.29
0.5
1.14
2.58
0.7
0.54
1.85
0.9
0.13
0.92
According to Corollary 3.4, for τ1 0, the upper bounds on the time delay to guarantee the
system is robustly stochastically mean-square exponentially stable are listed in Table 2. At the
same time, Table 2 also lists the upper bounds obtained from the criterion in 15.
Example 4.3. Consider the uncertain neutral linear stochastic system 3.51 with
0.5 0.0
,
0.0 0.3
−0.2 0.0
D
,
−0.95 0.2
A0 A1 −1.0 0.0
,
−1.0 −1.0
B0 0.2I,
4.3
B1 0.3I.
If Corollary 3.5 in this paper is applied, the maximal admissible delay τM of this example is
τM 0.6001.
Example 4.4. Consider the uncertain neutral linear stochastic system 3.65 with
A0 −2.0 0.0
,
0.0 −0.9
A1 −1.0 0.0
,
−1.0 −1.0
D
c 0
,
0 c
0 c < 1.
4.4
The maximum upper bound τM for this system in case of different cs is listed in Table 3, which
shows that the results obtained by the methods proposed in this paper are less conservative
than that in 19.
5. Conclusion
The mean-square exponential stability for uncertain neutral stochastic system with both
discrete and distributed time-varying delays has been investigated in this paper. Sufficient
conditions have been established without ignoring any terms in the weak infinitesimal
operator of Lyapunov-Krasovskii functional by considering the relationship among the timevarying delay, its upper bounds, and their difference. The usual restriction that τ̇t < 1 has
been removed by free-weight matrices method. According to the numerical examples, it has
been shown that the proposed results improve some existing ones.
Journal of Applied Mathematics
21
Acknowledgments
The authors would like to thank the associate editor and the reviewers for their valuable and
constructive comments and suggestions to improve the quality of this paper. This work is
supported by National Natural Science Foundation of China Grant nos. 60874114,
60904032, 61273126, 11201495, Natural Science Foundation of Guangdong Province Grant
no. 10251064101000008, Doctoral fund of Ministry of Education of China Grant no.
20090171120022, and Principal Fund of South China Agricultural University Grant no.
2009X008.
References
1 X. R. Mao, Stochastic Differential Equations with Applications, Horwood, 2nd edition, 2008.
2 L. R. Huang and X. R. Mao, “Delay-dependent exponential stability of neutral stochastic delay systems,” IEEE Transactions on Automatic Control, vol. 54, no. 1, pp. 147–152, 2009.
3 W.-H. Chen, W. X. Zheng, and Y. Shen, “Delay-dependent stochastic stability and H∞ -control of
uncertain neutral stochastic systems with time delay,” IEEE Transactions on Automatic Control, vol.
54, no. 7, pp. 1660–1667, 2009.
4 W. Feng and H. X. Wu, “Global asymptotic stability analysis for stochastic neutral-type delayed neural networks,” in Proceedings of the Chinese Control and Decision Conference (CCDC ’10), pp. 2658–2662,
Xuzhou, China, May 2010.
5 X. D. Li, “Global robust stability for stochastic interval neural networks with continuously distributed
delays of neutral type,” Applied Mathematics and Computation, vol. 215, no. 12, pp. 4370–4384, 2010.
6 Y. Chen, W. X. Zheng, and A. K. Xue, “A new result on stability analysis for stochastic neutral systems,” Automatica, vol. 46, no. 12, pp. 2100–2104, 2010.
7 B. Song, S. Xu, J. Xia, Y. Zou, and Y. Chu, “Design of robust non-fragile H∞ filters for uncertain neutral
stochastic systems with distributed delays,” Asian Journal of Control, vol. 12, no. 1, pp. 39–45, 2010.
8 G. Chen and Y. Shen, “Robust H∞ filter design for neutral stochastic uncertain systems with timevarying delay,” Journal of Mathematical Analysis and Applications, vol. 353, no. 1, pp. 196–204, 2009.
9 W.-H. Chen, Z.-H. Guan, and X. Lu, “Delay-dependent exponential stability of uncertain stochastic
systems with multiple delays: an LMI approach,” Systems & Control Letters, vol. 54, no. 6, pp. 547–555,
2005.
10 Y. He, Q.-G. Wang, L. Xie, and C. Lin, “Further improvement of free-weighting matrices technique for
systems with time-varying delay,” IEEE Transactions on Automatic Control, vol. 52, no. 2, pp. 293–299,
2007.
11 Y. He, Q.-G. Wang, C. Lin, and M. Wu, “Delay-range-dependent stability for systems with time-varying delay,” Automatica, vol. 43, no. 2, pp. 371–376, 2007.
12 Y. Zhang, Y. He, and M. Wu, “Delay-dependent robust stability for uncertain stochastic systems with
interval time-varying delay,” Acta Automatica Sinica, vol. 35, no. 5, pp. 577–582, 2009.
13 D. Yue, Q.-L. Han, and J. Lam, “Network-based robust H∞ control of systems with uncertainty,”
Automatica, vol. 41, no. 6, pp. 999–1007, 2005.
14 X. F. Jiang and Q.-L. Han, “Delay-dependent robust stability for uncertain linear systems with interval
time-varying delay,” Automatica, vol. 42, no. 6, pp. 1059–1065, 2006.
15 H. C. Yan, X. H. Huang, H. Zhang, and M. Wang, “Delay-dependent robust stability criteria of uncertain stochastic systems with time-varying delay,” Chaos, Solitons and Fractals, vol. 40, no. 4, pp. 1668–
1679, 2009.
16 H. Y. Shao, “Improved delay-dependent stability criteria for systems with a delay varying in a range,”
Automatica, vol. 44, no. 12, pp. 3215–3218, 2008.
17 J. J. Yu, K. J. Zhang, and S. M. Fei, “Further results on mean square exponential stability of uncertain
stochastic delayed neural networks,” Communications in Nonlinear Science and Numerical Simulation,
vol. 14, no. 4, pp. 1582–1589, 2009.
18 V. Suplin, E. Fridman, and U. Shaked, “H∞ control of linear uncertain time-delay systems—a projection approach,” IEEE Transactions on Automatic Control, vol. 51, no. 4, pp. 680–685, 2006.
19 E. Fridman and U. Shaked, “Delay-dependent stability and H∞ control: constant and time-varying
delays,” International Journal of Control, vol. 76, no. 1, pp. 48–60, 2003.
22
Journal of Applied Mathematics
20 A. E. Rodkina and M. V. Basin, “On delay-dependent stability for vector nonlinear stochastic delaydifference equations with Volterra diffusion term,” Systems & Control Letters, vol. 56, no. 6, pp. 423–
430, 2007.
21 M. V. Basin and A. E. Rodkina, “On delay-dependent stability for a class of nonlinear stochastic
systems with multiple state delays,” Nonlinear Analysis, vol. 68, no. 8, pp. 2147–2157, 2008.
22 H. J. Gao and C. H. Wang, “A delay-dependent approach to robust H∞ filtering for uncertain discretetime state-delayed systems,” IEEE Transactions on Signal Processing, vol. 52, no. 6, pp. 1631–1640, 2004.
23 T. Li, A. G. Song, and S. M. Fei, “Robust stability of stochastic Cohen-Grossberg neural networks with
mixed time-varying delays,” Neurocomputing, vol. 73, no. 1–3, pp. 542–551, 2009.
24 C. X. Li, J. T. Sun, and R. Y. Sun, “Stability analysis of a class of stochastic differential delay equations
with nonlinear impulsive effects,” Journal of the Franklin Institute, vol. 347, no. 7, pp. 1186–1198, 2010.
25 C. X. Li, J. P. Shi, and J. T. Sun, “Stability of impulsive stochastic differential delay systems and its
application to impulsive stochastic neural networks,” Nonlinear Analysis, vol. 74, no. 10, pp. 3099–
3111, 2011.
26 K. Q. Gu, Q.-L. Han, A. C. J. Luo, and S.-I. Niculescu, “Discretized Lyapunov functional for systems
with distributed delay and piecewise constant coefficients,” International Journal of Control, vol. 74, no.
7, pp. 737–744, 2001.
27 J. K. Hale and S. Lunel, Introduction to Functional Differential Equations, Springer, New York, NY, USA,
1993.
28 E. K. Boukas and Z. Liu, Deterministic and Stochastic Time-Delay Systems, Birkhäuser, Boston, Mass,
USA, 2002.
29 V. Kolmanovskii and A. Myshkis, Introduction to the Theory and Applications of Functional Differential
Equations, Kluwer Academic, Dodrecht, The Netherlands, 1999.
30 K. Gu, “An integral inequality in the stability problem of time-delay systems,” in Proceedings of the
39th IEEE Confernce on Decision and Control, vol. 3, pp. 2805–2810, Sydney, Australia, December 2000.
31 S. Y. Xu and T. W. Chen, “Robust H∞ control for uncertain stochastic systems with state delay,” IEEE
Transactions on Automatic Control, vol. 47, no. 12, pp. 2089–2094, 2002.
Advances in
Operations Research
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Advances in
Decision Sciences
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Mathematical Problems
in Engineering
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Journal of
Algebra
Hindawi Publishing Corporation
http://www.hindawi.com
Probability and Statistics
Volume 2014
The Scientific
World Journal
Hindawi Publishing Corporation
http://www.hindawi.com
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
International Journal of
Differential Equations
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Volume 2014
Submit your manuscripts at
http://www.hindawi.com
International Journal of
Advances in
Combinatorics
Hindawi Publishing Corporation
http://www.hindawi.com
Mathematical Physics
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Journal of
Complex Analysis
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
International
Journal of
Mathematics and
Mathematical
Sciences
Journal of
Hindawi Publishing Corporation
http://www.hindawi.com
Stochastic Analysis
Abstract and
Applied Analysis
Hindawi Publishing Corporation
http://www.hindawi.com
Hindawi Publishing Corporation
http://www.hindawi.com
International Journal of
Mathematics
Volume 2014
Volume 2014
Discrete Dynamics in
Nature and Society
Volume 2014
Volume 2014
Journal of
Journal of
Discrete Mathematics
Journal of
Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com
Applied Mathematics
Journal of
Function Spaces
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Optimization
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014