Impact of Liquefied Natural Gas Usage and Payload Size
on Hybrid Wing Body Aircraft Fuel Efficiency
by
Pritesh Mody
Bachelor of Science in Aeronautical and Astronautical Engineering
Purdue University (2008)
Submitted to the School of Engineering
in partial fulfillment of the requirements for the degree of
Masters of Science in Aeronautics and Astronautics
at the
MASSACHUSETTS INSTITUTE OF TECHNOLOGY
June 2010
c Massachusetts Institute of Technology 2010. All rights reserved.
Author . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
School of Engineering
June, 2010
Certified by . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
James Hileman
Principal Research Engineer
Department of Aeronautics and Astronautics
Thesis Supervisor
Certified by . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Mark Drela
Terry J. Kohler Professor of Fluid Dynamics
Department of Aeronautics and Astronautics
Thesis Supervisor
Accepted by . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Eytan H. Modiano
Associate Professor of Aeronautics and Astronautics
Chair, Committee on Graduate Students
2
Impact of Liquefied Natural Gas Usage and Payload Size
on Hybrid Wing Body Aircraft Fuel Efficiency
by
Pritesh Mody
Submitted to the School of Engineering
on June, 2010, in partial fulfillment of the
requirements for the degree of
Masters of Science in Aeronautics and Astronautics
Abstract
This work assessed Hybrid Wing Body (HWB) aircraft in the context of Liquefied Natural Gas (LNG) fuel usage and payload/range scalability at three scales: H1 (B737),
H2 (B787) and H3 (B777). The aircraft were optimized for reduced fuel burn and
airframe noise at approach, based on NASA N+3 goals for the 2030 timeframe.
Well-to-wake greenhouse gas emissions for LNG from conventional sources were estimated to be 16% lower than conventional Jet A. Minimally insulated in-wing storage
was shown to reduce HWB wing loading and improve fuel burn by 7-12%. Improvements were based on 16% higher fuel specific energy, 17% lower skin friction drag
through wall cooling on the wing bottom and 11-16% lower SFC through alternative cycles. Considerations were made for 1% insulation/fuel weight and 39% additional fuel volume but secondary systems and icing issues were not examined. Though
technologically viable, significant developmental hurdles, infrastructure demands and
safety risks would need to be overcome before these benefits could be acheived.
The global optimization framework was presented using a hybrid genetic algorithm
for simultaneous optimization of airframe/propulsion/operations. Due to cabin aisle
height restrictions, unusable “white” space for the H1 designs resulted in excessive
empty weight fractions. However the design achieves 45% lower fuel burn than the
B737-800 due to its all lifting configuration, advanced propulsion system and assumed
structural advancements. The H2 and H3 designs mitigated this drawback by carrying
increased payload in a larger, more efficiently packaged centerbody with H3 fuel burn
being 52-56% lower than the B777-200LR. However as airport span constraints for the
B777 class aircraft were reached, the scaling performance was observed to asymptote
with lower improvement from H2 to H3, as compared from H1 to H2.
Thesis Supervisor: James Hileman
Title: Principal Research Engineer
Department of Aeronautics and Astronautics
Thesis Supervisor: Mark Drela
Title: Terry J. Kohler Professor of Fluid Dynamics
Department of Aeronautics and Astronautics
3
4
Acknowledgments
This work would not be possible without the guidance and support of my co-advisor
Dr. James Hileman. I would like to sincerely thank him for his tireless encouragement,
time and dedication as an advisor, mentor and friend. I would also like to thank my
co-advisor Prof. Mark Drela for giving me the opportunity to be part of this amazing
project. Prof. Drela continues to inspire and revolutionize the way I think at every
interaction.
The work presented here is part of a larger team effort led by Prof. Ed Greitzer,
who time and again has taught me that the mark of a great team is that the whole is
greater than the sum of the individual parts. I was very privileged to be part of such
an amazing team and would like to thank Dr. Elena de la Rosa Blanco, Sho Sato,
David Hall and Ed Wen for the knowledge and excitement that they brought to the
table every day!
Next I would like to thank the following and also apologize for my abusive overuse
of their hospitality. Leo, the instant repository of all HWB code knowledge; Andrew
for his endless wisdom on all things optimization; Alejandra for sharing her love of
fluid mechanics; Russ for his newly discovered passion for fuels and Hemant for his
general sanity and steadfast friendship. Also, special thanks to my friends, Sydney,
Hiten, Jon A., Dilani, Reena, Britt, Jon G., Zach, Georgia, Alex and Jon L. for making
this a memorable experience.
No acknowledgment would be complete without thanking my loving family for
helping me get to and get through MIT through their endless support and encouragement. I would also like to thank my girlfriend for her love, support and tolerance of
my endless insanity over these past two years.
Lastly, I would like to acknowledge the financial and academic support of the MIT
and NASA community.
5
Contents
Nomenclature
12
1 Introduction
1.1 Background and Related Work . . . . . . . . .
1.1.1 Hybrid Wing Body Aircraft . . . . . .
1.1.2 Liquefied Natural Gas . . . . . . . . .
1.1.3 Multidisciplinary Design Optimization
1.2 Thesis Objectives . . . . . . . . . . . . . . . .
1.3 Thesis Contribution and Outline . . . . . . . .
2 Liquefied Natural Gas
2.1 Introduction . . . . . . . . . . . . . . . . . . .
2.2 Lifecycle Emissions . . . . . . . . . . . . . . .
2.3 LNG Fuel Integration . . . . . . . . . . . . . .
2.3.1 Non-integral LNG Tank . . . . . . . .
2.3.2 Integral LNG Tanks and Laminar Flow
3 Hybrid Wing Body Aircraft Design
3.1 Mission Definition . . . . . . . . . . . . . . . .
3.2 Cabin Design . . . . . . . . . . . . . . . . . .
3.3 Aircraft Design . . . . . . . . . . . . . . . . .
3.3.1 Aerodynamic Model . . . . . . . . . .
3.3.2 Propulsion Model . . . . . . . . . . . .
3.3.3 Structural Model and Weight Buildup
3.3.4 Operations Model . . . . . . . . . . . .
3.3.5 Stability . . . . . . . . . . . . . . . . .
4 Global Optimization Setup
4.1 Problem Definition . . . .
4.1.1 Objective Function
4.1.2 Design Variables .
4.1.3 Design Parameters
4.1.4 Design Constraints
4.2 Optimization Method . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
7
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. . . . . . .
. . . . . . .
. . . . . . .
. . . . . . .
Promotion
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
15
16
16
18
19
20
21
.
.
.
.
.
23
23
25
28
28
32
.
.
.
.
.
.
.
.
39
39
40
43
44
47
50
52
53
.
.
.
.
.
.
57
57
57
58
59
60
61
4.2.1
4.2.2
Genetic Algorithm . . . . . . . . . . . . . . . . . . . . . . . . . 63
Sequential Quadratic Programming . . . . . . . . . . . . . . . . 67
5 Global Optimization Results
5.1 Performance Fundamentals and Trades . . . . . . . . . . . . .
5.1.1 Fundamentals of PFEI . . . . . . . . . . . . . . . . . .
5.1.2 Fundamentals of Airframe Noise at Approach . . . . .
5.1.3 Fundamental Trade Space of PFEI and Airframe Noise
proach . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.2 Payload and Range Scalability . . . . . . . . . . . . . . . . . .
5.3 Fuel Type . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.4 Airframe Approach Noise . . . . . . . . . . . . . . . . . . . . .
. . . . .
. . . . .
. . . . .
at Ap. . . . .
. . . . .
. . . . .
. . . . .
71
73
73
75
76
77
80
82
6 Conclusion
85
6.1 Summary and Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . 85
6.2 Recommendations for Future Work . . . . . . . . . . . . . . . . . . . . 88
Bibliography
90
8
List of Figures
1-1 H3.2 Design [12] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
2-1 LNG Well-to-Tank Lifecycle . . . . . . . . . . . . .
2-2 Non-Integral Tank Design . . . . . . . . . . . . . .
2-3 Non-Integral Tank Design: Optimal Performance for
Tank Geometry . . . . . . . . . . . . . . . . . . . .
2-4 Non-Integral Tank Design: General Performance . .
2-5 Integral Tank Design . . . . . . . . . . . . . . . . .
. . . . . . . . . . .
. . . . . . . . . . .
an Unconstrained
. . . . . . . . . . .
. . . . . . . . . . .
. . . . . . . . . . .
3-1 H-Series: Cabin Layouts . . . . . . . . . . . . . . . . . . . . . . . . . .
3-2 Revenue cargo capacity as a fraction of maximum structural payload
for varied aircraft sizes from single aisle to wide body aircraft . . . . .
3-3 H-Series: Design/Optimization Methodology (HWBOpt) . . . . . . . .
3-4 MSES analysis for outer wing supercritical airfoil . . . . . . . . . . . .
3-5 Comparison of SAX-40, SAX-40F and H3.2 planforms (left) and Comparison of SAX40F (untrimmed, no winglets) HWBOpt Aerodynamic
Model to Boeing CFD analysis (right) . . . . . . . . . . . . . . . . . .
3-6 H-Series: Sample Propulsion Configurations Illustrations [12] . . . . . .
25
29
30
31
34
41
42
43
45
46
49
4-1 H-Series: Global Optimization Design Variables . . . . . . . . . . . . . 59
5-1
5-2
5-3
5-4
H-Series: Pareto optimal designs at all scales for Jet A and LNG . . . .
H-Series: Planform for optimal PFEI with Jet A (black) and LNG (blue)
H-Series: Planform for optimal PFEI with LNG and Jet A . . . . . . .
H-Series: Planform for optimal PFEI (solid line) and optimal airframe
noise at approach (dash line) . . . . . . . . . . . . . . . . . . . . . . . .
9
72
78
81
84
List of Tables
1.1
NASA Program Requirements . . . . . . . . . . . . . . . . . . . . . . . 16
2.1
2.2
2.3
2.4
LNG GHG Lifecyle Emissions
LNG GHG Lifecyle Emissions
LNG GHG Lifecyle Emissions
Fuel Tank Design Regulations
3.1
3.2
3.3
N+3 Design Requirements . . . . . . . . . . . . . . . . . . . . . . . . . 40
H-Series: Payload/Range Definition . . . . . . . . . . . . . . . . . . . . 42
H-Series: Propulsion System Configuration Options [12] . . . . . . . . . 48
5.1
5.2
5.3
5.4
H-Series:
H-Series:
H-Series:
H-Series:
Test Cases
Results . .
Validation
. . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Payload/Range Scalability Effect on PFEI . . .
Local Constraint Sensitivity . . . . . . . . . . .
Fuel Trades . . . . . . . . . . . . . . . . . . . .
PFEI and Airframe Noise at Approach Trades
11
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
26
27
27
28
77
79
81
83
Nomenclature
Abbreviations
AIAA
AVL
Axxx
BLI
BPR
Bxxx
CAEP
CBN
CEN
CFD
CG
FAA
FAR
FPR
GA
GHG
GREET
ICAO
JAA
KKT
LDN
LNG
MLI
MOGA
MSES
NA
NG
NNA
NP
OEW
OML
MTOW
NETL
OML
American Institute of Aeronautics and Astronautics
Athena Vortex Lattice
Airbus xxx Aircraft
Boundary Layer Ingestion
Bypass Ratio (for turbofan)
Boeing xxx Aircraft
Committee on Aviation Environmental Protection (ICAO)
Cruise Begin
Cruise End
Computational Fluid Dynamics
Center of Gravity
Federal Aviation Administration
Federal Aviation Regulations
Fan Pressure Ratio
Genetic Algorithm
Green House Gases
Green House Gases, Regulated Emissions, and Energy use in Transportation
International Civil Aviation Organization
Joint Aviation Authorities
Karush-Kuhn-Tucker
Day Night Noise Level
Liquefied Natural Gas
Multi-Layer Insulation
Multi-Objective Genetic Algorithm
Multi-Element Airfoil Design/Analysis Software
North American
Natural Gas
Non-North American
Neutral Point
Operating Empty Weight
Outer Mold Line
Maximum Gross Take-Off Weight
National Energy and Technology Laboratory (US)
Outer Mold Line
12
OPR
PAX
PFEI
PROP
RSM
SAI
SFC
SM
SQP
US DOE
US EPA
US EIA
WTW
WTT
Overall Pressure Ratio (for gas turbine)
Passenger(s)
Payload Fuel Energy Intensity
Propulsion configuration (See Table 3.3)
Response Surface Model
Silent Aircraft Initiative
Specific Fuel Consumption
Longitudinal Static Margin
Sequential Quadratic Programming
United States Department of Energy
United States Environmental Protection Agency
United States Energy Information Administration
Well-to-Wake
Well-to-Tank
Symbols
α
β
γ
Γ
machine
κ
λ
λeig
Λ
µ
ν
ξ
ρ
σ
φ
Ω
ψ
c
Cx
d
D
e
F
g
g
Angle of attack
Coefficient of volume expansion
Heat capacity ratio
Domain boundary
Machine precision
Condition number
Lagrange multiplier
Eigenvalue
Mid-chord sweep
Dynamic viscosity
Kinematic viscosity
Uncooled length
Density
Yield strength
Merit function
Domain
Ratio of net thrust to total airframe drag without BLI
Chord length
Coefficient of x
Search direction vector
Drag
Oswald efficiency factor
Thrust
Acceleration due to gravity
Constraint vector
13
~
h
H
H
J
J
k
`
L
L
M
M
p
q
Q
r
r
R
R
s
S
t
T
T
u
v
w
W
Height
Convective heat transfer coefficient
Hessian of J
Hessian of L
Jacobian matrix
Objective function
Thermal conductivity
Length
Lift
Lagrangian objective function
Moment
Constraint penalty multiplier
Pressure
Dynamic pressure
Heat transfer rate
Radius
Residual vector
Range
Thermal resistance
Streamwise coordinate
Surface area
Thickness
Temperature
Twist distribution scaling factor
Velocity along x-coordinate
Velocity along y-coordinate
Wall
Weight
14
Chapter 1
Introduction
Several key challenges confront commercial aviation today including, but not limited to, the high volatility in fuel prices, environmental impact of emissions, noise
restrictions, saturation of primary airports and the increased demand for lower ticket
fares. Some of the problems extend beyond aviation, as global understanding grows
on the finite nature of our energy resources and the need for their responsible use to
minimize climate impact and improve air quality. Despite the challenges, air travel
continues to grow, with expansion of saturated primary airports continuing to remain
cost/time/land prohibitive. In addition, the faster adaptation of other transportation
modes to meet these challenges will continue to place increasing pressure on aviation.
The work in this thesis was completed as part of a NASA sponsored effort to address
these challenges through improvements in the corners of the aviation performance
trade space: noise, landing and take-off (LTO) NOX emissions, fuel burn and field
length. The focus of the studies is on subsonic fixed wing commercial transports for
the 2030-2035 entry into service (EIS) timeframe. The work is intended to identify
key technology development needs to meet or exceed the design targets specified in
Table 1.1. The vehicles represent a research and development generation known as
N+3, denoting three generations beyond the current commercial transport fleet.
15
Table 1.1: NASA Program Requirements
NASA
N+1
N+2
N+3
Metrics
(TRL6 2015)
(TRL6 2020)
(TRL6 2025)
Reference Aircraft/Engine
B737/CFM56
B777/GE90
User Defined
Noise (cum. below Stage 4)
-32 dB
-42 dB
-71 dB
LTO NOX (below CAEP 6)
-60%
-75%
<-75%
Aircraft Fuel Burn
-33%
-40%
<-70%
Field Length
-33%
-50%
Exploit Metroplex
This work is part of the collaborative efforts of the Massachusetts Institute of
Technology (MIT), Aurora Flight Sciences and Pratt & Whitney. In particular the
work addresses design and trade space analysis for an advanced hybrid wing body
(HWB) aircraft with consideration of liquefied natural gas (LNG) as an aviation fuel
to strive towards the N+3 goals.
1.1
1.1.1
Background and Related Work
Hybrid Wing Body Aircraft
The hybrid wing body (HWB) aircraft bridges the gap between the flying wing and
conventional tube-and-wing aircraft by blending the wings and fuselage into a hybrid
all-lifting configuration. The earliest predecessors of the concept include the Junkers
G.38 that first flew in 1929. The concept continues to be explored today for both
commercial and military applications with focus of fuel efficiency, noise reduction and
even stealth.
Current designs of research focus include Boeing’s Blended Wing Body (BWB)
concept developed in collaboration with NASA . The original concept developed for a
800 passenger, 7000 nm design is described by Liebeck [29] and compared to conventional tube-and-wing aircraft. The centerbody housed a double deck cabin extended
spanwise and used as wing bending structure to enable a long wingspan while lowering
16
operating empty weight by 12%. The total wetted area reduction for the all-lifting
body along with wing boundary layer ingestion (BLI) using embedded engines results
in an overall 20% higher lift-to-drag ratio. The overall concept was estimated to have
27% lower fuel burn and 15% lower take-off weight. Subsequent development [28]
studied a family of BWB transports ranging from 200 to 600 passengers with a high
level of parts commonality and manufacturing efficiency. Studies also demonstrated
that concept to be adaptable to cruise Mach numbers up to 0.95. Current efforts
focus on flight testing of a 8.5 percent scale, remotely piloted prototype designated
the X-48B.
Another HWB design of interest, is the Silent Aircraft eXperimental (SAX-40)
aircraft [19, 20] that resulted from the work of the Silent Aircraft Initiative (SAI) to
reduce noise to inaudible levels outside of the airport boundary in typical urban areas.
The HWB airframe was used to provide significant forward noise shielding for the
embedded propulsion while enabling the elimination of noisy high lift devices. The
aircraft also used low-noise landing gear designs and operation changes to achieve a
calculated noise level of 62 dBA at the airport perimeter. Additionally, the innovative
aerodynamic design and BLI resulted in an estimated 25% fuel burn improvement
compared to existing commerical aircraft, on a basis of passenger miles flown. The
study highlighted the HWB concept ability to simultaneously reduce noise and fuel
burn through mutually beneficial multidisciplinary design interactions.
The fuel burn and noise focus was continued as part of NASA N+2 work. The
analysis included study of the SAX-40F [30], a cargo variant of the SAX-40 with
double the payload weight and 20% greater range. The SAX-40F was further refined
by Boeing to produce podded engine (N2A) and embedded engine (N2B) aircraft
variants to address the N+2 goals [47].
The design methodology (HWBOpt) used for the N+3 HWB design (H-Series)
aircraft considered here is built upon the large body of work developed during SAI
and N+2 programs to expand the design space and incorporate innovative technologies
for the N+3 generation of aircraft.
17
1.1.2
Liquefied Natural Gas
The use of cryogenic fuels is not new to aerospace as there are extensive applications
in space systems to meet the high mass flow rates required by rocket engines. Usage in
aviation is limited to research applications in supersonic and hypersonic flight regimes.
Cryogenic fuels research in subsonic, commercial aviation has focused on the impact
of the change in fuel composition on combustion emissions and fuel specific energy.
However to address the global climate impact of these fuels, full well-to-wake (WTW)
lifecycle emissions estimates are required. The Greenhouse gases Regulated Emissions and Energy use in Transportation (GREET) framework developed by Argonne
National Laboratory [52] was used for estimating greenhouse gas (GHG) emissions.
NASA has previously investigated the use of liquefied hydrogen LH2 , liquefied
methane LCH4 and Jet A fuel in conventional subsonic tube-and-wing commercial
transport aircraft [4]. The study evaluated only insulated tanks and showed LCH4 to
be most cost competitive at ranges between 1500 to 5500 nm, with Jet A and LH2
being favored at the lower and higher ranges respectively. The report also stated that
there were no technical barriers in the design of ground and aircraft systems to prevent
the use of liquefied methane as an alternative fuel. However, based on legislation of
the time and consideration for safety risks the assessors believed that storage of large
quantities of methane at airports would not be permitted.
Lockheed Martin assessed storage of LH2 in minimally insulated wing-tanks to
promote laminar flow in 2D boundary layers by wall cooling [35, 46]. Preliminary
systems analysis for an advanced commercial transport considered cooling of the engine
pods, parts of the fuselage and 75% of the wing and showed drag reductions near
27%, translating to 21% lower direct operating costs. The results also highlighted the
impact of pressure gradients, cross-flow effects and operational noise to produce early
transition. In adverse gradients, especially in the presence of transonic flow where
boundary layer separation is likely to occur, laminarization was deemed unlikely in
typical applications.
In Russia, Tupolev has considered both LNG and LH2 configurations for the TU-
18
155 commercial aircraft with an additional focus on compatible engine technology.
The designs were fuel cost driven and in 1989 the TU-155 aircraft performed its first
flight on LNG. The TU-156 platform later evolved to support both Jet A and LNG
to improve safety and flexibility. Additional work also focused on different markets,
payloads and configurations, leading to TU-136, TU-204, TU-330 and TU-334 aircraft. Though available literature on their work is limited [49], the designs provide
the necessary system level proof of concept.
Liquefied hydrogen was not considered in this work as a viable alternative fuel for
aviation. In reference to alternative fuel feasibility Hileman [14] makes the case that
since production and liquefaction of hydrogen require energy, is a not a fuel but a
means of storing energy. Hence viability of hydrogen as an aviation fuel is contingent
on the availability of clean, cheap energy for its production and liquefaction. However,
such energy sources would first displace electric generation from fossil sources, limiting
potential for usage in aviation.
1.1.3
Multidisciplinary Design Optimization
Since the HWB concept is predicated on the integration of the fuselage and wing with
significant additional gains from airframe/propulsion integration and operations modification, the concept is well suited for multidisciplinary design optimization (MDO).
In addition, the high level of interaction shifts the focus from subsystem level design to integrated system level requirements not typically addressed by normal design
processes.
Wakayama [51] described the challenges and opportunities discovered in the development of Boeing’s BWB concept. The work was based on an adaptation of Boeing’s
Wing Multidisciplinary Optimization Design (WingMOD) tool. Modifications were
included to assess cabin design, aerodynamics, structures, weight, control and stability characteristics of a BWB [50] configuration. The disciplinary tools were linked
through a modified version of Stanford’s GENeric Interface for Engineering (GENIE).
The framework provides access to the efficient NPSOL optimizer for smooth (at least
19
twice differentiable), highly non-linear, constrained problems. It also integrates the
robust Non-Linear Optimizer (NLOpt) for scaling analysis to allow efficient gradient
based optimization of over a hundred design variables. Both algorithms are based on
sequential quadratic programming (SQP) solvers to assess a wide array of missions and
flight conditions. The optimization framework was later extended to the simultaneous
optimization of a family of BWB aircraft [53].
Jones [22] describes distributed optimization framework for HWB aircraft based
on problem decomposition into three subspaces: aircraft planform and engine design,
aircraft operations, and wing design. The architecture resembles collaborative optimization (CO) [25], with a system level optimizer addressing minimization of aircraft
system noise while subspace optimizers operate on the individual disciplinary models.
The implementation used a multistart gradient based optimization approach at the
system level using a SQP solver and resulted in fundamentally different design solutions with the same minimum noise value as in the single-level optimization, but with
much lower fuel burn. Although this algorithm was ultimately not used for the final
SAI design [19], it did provide insight that was used to achieve the final design.
1.2
Thesis Objectives
The purpose of this research is to support the efforts of the MIT led team for development of an advanced HWB aircraft concept to address the NASA N+3 goals. The
previous work described from SAI and the N+2 program provided the initial framework that was expanded for inclusion of N+3 technologies. Amongst them was the use
of LNG as an alternative aviation fuel taking into considered HWB integration and
lifecycle GHG emissions. Previous MDO efforts focused on deterministic global search
in smooth function spaces for Boeing’s BWB or fractional factorial search of the coupled airframe/operational design spaces for the SAI SAX-40. The problem considered
here expands the design space to include discrete technological and configurational
choices while attempting simultaneous airframe/propulsion/operational optimization
20
that requires development of a new MDO framework. The objectives of this thesis
work can be summarized below:
• Modify and re-design SAX40/N2A/N2B aircraft system to address N+3 program
requirements
• Assesses lifecycle GHG emissions and HWB airframe/fuel system integration for
liquefied natural gas
• Develop global optimization framework for assessment of integrated technology/airframe/ propulsion/operational design space
• Quantify payload/range scalability in N+3 HWB aircraft and identify key design
drivers and constraints
1.3
Thesis Contribution and Outline
The main contributions of the thesis are as follows:
• The conceptual design and assessment of HWB aircraft towards NASA’s N+3
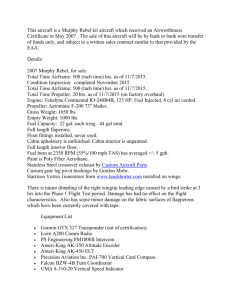
goals was conducted. Figure 1-1 shows the final concept delivered in the MIT
N+3 final report to NASA [12].
• The design methodology developed in SAI was expanded for global design optimization including LNG fuel usage, N+3 technology integration and payload/range scalability.
Details of the analysis and results are presented in the following chapters.
Chapter 2 describes estimation of lifecycle GHG emissions of LNG using the
GREET framework. LNG fuel integration into the HWB airframe is assessed for
integral and non-integral tank systems based on design requirements, sizing trades
and fuel/tank system weights.
21
Figure 1-1: H3.2 Design [12]
Chapter 3 describes the HWBOpt framework leveraged from the SAI HWB design methodology. Assumptions and estimation methods for individual disciplinary
modules and updates for N+3 HWB design are described.
Chapter 4 describes the formulation for the multidisciplinary system design optimization problem. Design objectives, constraints and optimization methods are discussed. Development of a two tier optimization framework using a genetic algorithm
followed by sequential quadratic programming is also discussed.
Chapter 5 presents the results and assesses the trade space from the HWB global
optimization analysis. The results assess both LNG and Jet A fuels for HWB designs
at three discrete aircraft scales. Results contribute to understanding of fundamental
trades of payload/range scalability relative to fuel burn and airframe noise for both
fuels.
22
Chapter 2
Liquefied Natural Gas
This chapter describes the considerations made for assessment of Liquefied Natural
Gas as an aviation fuel. This includes estimation of lifecycle greenhouse gas emissions
and analysis of fuel storage options including both integral and non-integral tank
systems.
2.1
Introduction
Natural gas (NG) is a fossil fuel containing mainly methane (about 90%), ethane,
propane, butane, and trace amounts of nitrogen. In addition to being non-toxic and
non-corrosive, it has the lowest CO2 emissions per unit of energy of any fossil fuel.
When processed and cooled at atmospheric pressure to a liquid at -163 o C it is known as
Liquefied Natural Gas (LNG) and is about 1/600th the volume of NG. In comparison to
jet fuel, it has 16% higher specific energy (Energy/Mass) but approximately 39% lower
energy density (Energy/Volume). LNG is not explosive; for combustion it requires
vaporization and gas/air mixtures in the flamable range of 5%-15%.
Though this assessment considers only LNG obtained from current conventional
sources, it is important to note alternative paths including NG obtained from methane
hydrates and shale-gas. Methane hydrate is comprised of a cage-like lattice of bonded
host water molecules enclosing gaseous methane guest molecules. The common form
23
is CH4 5.75H2 O (Structure I Methane Hydrate), where 5.75 is the hydrate number and
varies with the proportion of the guest methane molecule filled in the cages. These
structures occur naturally but are known to be unstable under thermal stimulation,
depressurization and chemical stimulation with brines and alcohols, reverting back to
water and natural gas. The Department of Energy estimates the worldwide methane
hydrate potential to approach a staggering figure of 400 million trillion cubic feet
making it an abundant source of energy, possibly exceeding the combined energy
potential of all other known fossil fuels [27]. Despite their vast potential these deposits
pose an enormous environmental threat [13] due to their thermal instability and the
risk of large scale methane release from hydrate deposits. The consequences of allowing
spontaneous release combined with their energy potential makes the methane from
hydrate an attractive energy source. Another potential abundant source of NG, with
estimates at more than five times proven conventional reserves, is shale-gas NG [3].
Recent advancements through economies of scale and improvements in techniques
continue to reduce production costs, making shale prospects increasingly attractive.
In 2007, NG contributed to 22% of the United States energy consumption [32] with
19.1% (0.77 trillion cubic feet) of the total net imports in the form of LNG [2] which
serves as a cost-efficient transportation intermediary. NG consumption is expected to
increase by 20% of 2003 levels by 2030 [21] and the Energy Information Administration
(EIA) estimates that LNG imports will peak in 2018 to 1.5 trillion cubic feet due to
short term supply excesses created by a growth in world liquefaction capacity and
return to 0.8 trillion cubic feet by 2030 [1]. To meet the projected demands, net
imports of natural gas are forecast to grow from 16% of the total supply in 2005
to 21% in 2030. To help guard against potential supply interruptions, shortage and
improve energy security, the United States has enacted the Methane Hydrate Research
and Development Act of 2000. This has initiated an interagency effort to evaluate risk
and demonstrate technical and economic viability of the methane recovery from arctic
hydrate by 2015 and marine hydrate by 2025 [31].
Though NG is typically utilized for electricity generation and ground transporta-
24
tion, the following analysis shows that excess supply potential could be a viable candidate for a cleaner substitute to conventional jet fuel in future aircraft designs. However,
since LNG is not a drop-in fuel, meaning that it is incompatible with today’s aircraft,
additional analysis of infrastructure requirements, economic viability, safety and icing
issues is required. Also not considered here are synthetic aviation fuels that could also
be obtained from NG [16, 44].
2.2
Lifecycle Emissions
The lifecycle of LNG extracted from conventional sources is shown below in Figure 2-1.
It starts with the extraction of NG from wells which is sent to processing plants for
the removal of water, carbon dioxide, sulfur and other hydrocarbons. It is then piped
short distances to base-load liquefaction plants for cooling to obtain LNG. Non-North
American (NNA) sourced LNG is then shipped using dedicated LNG ocean tankers
to one of 5 LNG terminals in operation in the United States, where it is stored and
then distributed within North America (NA) using trucks and rail.
NG
Extraction
Processing
Liquefaction
Transportation
Storage
Conventional Sources:
• Oil Fields
• Natural Gas Fields
Removal of:
• Water
• CO2
• Sulfur
• HCs
LNG at
LNG
at
‐162o C
1 Atm
NNA: Ocean Tankers
NA: Trucks and Rail
Port Terminals
Port
Terminals
and Fueling Depots LNG
Figure 2-1: LNG Well-to-Tank Lifecycle
The Greenhouse gases Regulated Emissions and Energy use in Transportation
(GREET) framework, developed by Argonne National Laboratory [52], was used as
the primary tool for the lifecycle analysis. Specifically, GREET version 1.8b was
25
used with the inclusion of process fuel lifecycle updates made by the MIT PARTNER
laboratory [44]. This work analyzed the lifecycle greenhouse gas (GHG) emissions from
the production of LNG using conventional natural gas well sources in North America
and non-North American sources. Both pathways are available in GREET to account
for different transportation and distribution requirements but with the assumption
that process efficiencies remain the same.
The refrigeration compressors account for the majority of the LNG plant energy
requirements [24] with liquefaction process energy efficiency estimated from literature
to be between 88-92% (91% nominal) [6, 11, 45, 52]. Extraction and processing process
efficiencies were set at default GREET values of 97.2%, which are representative of
the recovery of convetional NG [52]. For transportation using LNG ocean tankers,
the weighted average roundtrip distance to the U.S. of 7369 nautical miles [11] was
used, which is comparable to the default GREET value. The NG boil-off rate during
transport was estimated from the literature to be between 0.1-0.25% (0.15% nominal)
per day with 80% recovery [21, 52]. The variations in different key parameters that
were used to create three scenarios for GHG analysis are shown in Table 2.1. Since
the LNG is primarily used as a transport intermediary, the baseline scenario uses the
2007 export to import ratio for LNG [2].
Table 2.1: LNG GHG Lifecyle Emissions Test Cases
Emissions Scenario
Low
Baseline
High
NG Source (NA / NNA %)
100 / 0
20 / 80
0 / 100
Liquefaction Efficiency (%)
92
91
88
0.10
0.15
0.25
Tanker Boil-off Rate per Day (%)
The overall results are summarized in Table 2.2. The change in non-CO2 combustion emissions was not considered in this thesis. However, it should be noted that
since liquefaction requires removal of hydrogen sulphide in the processing step, SOX
emissions would be eliminated. Furthermore, soot emissions should also be dramatically reduced with the use of NG. The reference WTW GHG emissions of conventional
26
jet fuel was obtained from the work of Stratton et al [44].
Table 2.2: LNG GHG Lifecyle Emissions Results
Emissions Scenario
Low
Baseline
High
WTT CO2 emissions (gCO2 e/MJ)
11.2
12.6
15.3
WTT CH4 emissions (gCO2 e/MJ)
4.6
6.0
7.6
WTT N2 O2 emissions (gCO2 e/MJ)
0.1
0.1
0.1
WTT GHG emissions (gCO2 e/MJ)
15.9
18.7
23.1
Combustion CO2 (gCO2 e/MJ)
54.9
54.9
54.9
Total WTW GHG emissions (gCO2 e/MJ)
70.8
73.6
78.0
0.81
0.84
0.89
Total WTW GHG emissions relative to
conventional jet fuel (87.5 gCO2 e/MJ)
The results obtained in this analysis are comparable to those in the literature, presented in Table 2.3. Emissions for recovery/processing obtained here using GREET
are higher than other literature sources. Variations in transportation emissions are
based on different scenario assumptions that are based on the location of NG sources.
However, these results are based on conventional NG sources and the emissions associated with the recovery of NG from shale formations or methane hydrates could
differ.
Table 2.3: LNG GHG Lifecyle Emissions Validation
GHG (gCO2 e/MJ)
Recovery
Processing
Liquefaction
Transportation
Literature
2.7-3.1 [21]
1.3 [21]
4.7-13.3 [45]
0.9-7.3 [21]
0.9 [39]
1.7 [39]
6.1 [39]
1.1 [39]
3.5
4.0
6.5-10.0
1.0-4.6
Current Analysis
27
2.3
LNG Fuel Integration
In conventional commercial transport aircraft, fuel is typically stored in the wing tanks
and center body tanks (in the fuselage) using the existing wing box. The structure of
fuel storage systems on the aircraft is required to meet emergency landing and crash
resistance loads as stipulated in Federal Aviation Regulation (FAR) 25.561 and 29.952
respectively. The design load factors are specified in the units of acceleration due to
gravity (g) with consideration for directivity of the impact and location of the fuel
tank, as shown in Table 2.4.
Table 2.4: Fuel Tank Design Regulations
Design
FAR 29.952
FAR 25.561
Loads (g)
In cabin
Above/behind pax
Elsewhere
Upward
3.0
4.0
1.5
1.5
Forward
9.0
16.0
8.0
4.0
Sideway
3.0
8.0
2.0
2.0
Downward
6.0
20.0
4.0
4.0
Rearward
1.5
-
-
-
The following subsections 2.3.1 and 2.3.2 present an analysis of both fuel tanks
that are not integrated into the wing box (non-integral) as well as tanks that are
integrated into the wing box (integral).
2.3.1
Non-integral LNG Tank
Non-integral wing tanks, (i.e. not integrated into existing airframe structure) need to
be designed for both structural and thermal loads associated with LNG storage. Such
architecture would store and supply the LNG fuel at near atmospheric pressure in its
cryogenic, boiling-liquid state. Typical designs are dual walled with evacuated super
insulation. Since minimizing heat loss favors designs with minimum surface area to
volume ratios, efficient designs are restricted to spheres, cylinders and other rounded
28
geometries as shown in Figure 2-2. The thermal design trade-off lies between losses
due to fuel boil-off, assumed to be unusable, and insulation weight requirements. The
structural shells are sized based on FAR, see Table 2.4, with suitable safety margins
[4].
Figure 2-2: Non-Integral Tank Design
The coupled structural/heat transfer optimization problem can be solved analytically. The structural problem was evaluated by treating inner and outer structural
layers as thin walled pressure vessels. Conductive heat flow Q through each surface
was computed by constructing simple thermal resistive circuits [7] combining the inner
(i), outer (o), insulation (m) and internal support structures (s) using their conductive
resistances R. The outside temperature was assumed to be ambient for fully insulated
designs. For cylindrical portions of the tank, having length `, thickness t, surface areas
S, and thermal conductivities k, the heat transfer is given by:
Qcyl = Qcyl−1D `;
Ri =
Qcyl−1D = ∆T /Rcyl ;
ti
;
k i Si
Rm =
tm
;
km Sm
Rcyl = Ri +
Rs =
tm
;
ks Ss
1
Rm
Ro =
+
1
Rs
−1
+ Ro
(2.1)
to
;
ko So
Steady heat conduction through the hemispherical ends of the tank was modeled
as a multilayered sphere with heat transfer given by:
Qsph = ∆T /Rsph
Rsph =
ti
4π(r)(r+ti )ki
+
tm
4π(r+ti )(r+ti +tm )km
+
to
4π(r+ti +tm )(r+ti +tm +to )ko
(2.2)
The resulting steady rate of heat transfer through the a cylindrical fuel tank with
29
hemispherical ends is given by:
Qtank = Qcyl + Qsph
(2.3)
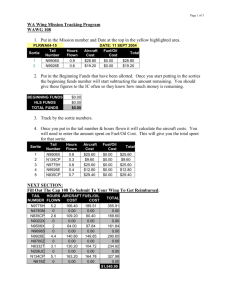
Results are shown in Figure 2-3 for a dual tanked system optimized to maximize
system (tank + usable fuel) specific energy for fixed usable energy requirements. The
analysis considered a 12 hour cycle, where boiled-off fuel in that timeframe was considered unusable. These designs assumed tank ullage (i.e. unfilled space) of 10%,
structural safety factor of 1.5, Al-Li Alloy 1460 structural material (σyield = 620 MPa,
ρ = 2590 kg/m3 , k = 86 W/mK) and Multi-Layer Insulation (MLI, ρ = 39 kg/m3 ,
k = 0.00007 W/mK).
Equivalent Weight of Jet A (kg)
15000
25000
30000
B7
737­800
6
20000
5
35000
SAX­40
10000
4
40000
45000
50000
Tank Length (m)
WTank / WLCH4 (%)
3
Tank Radius (m)
2
1
8560
13560
18560
23560
28560
33560
38560
LCH4 Fuel Weight (kg)
Figure 2-3: Non-Integral Tank Design: Optimal Performance for an Unconstrained
Tank Geometry
For most cases the tank/fuel weight penalty for such designs was 3-4%, however
these results are for unconstrained geometries. The B737-800, the energy requirement
of which is shown in Figure 2-3 along with SAX-40, is used as a representative example
to elaborate on the issue because the tank radius required to achieve this minimum
weight was infeasible. To assess the impact of geometric constraints, a range of tank
30
geometries were examined for the energy they could contain as well as the system
(LCH4 +Tank) specific energy for different geometric allowances on a single tank of
radius r and length ` in the cylindrical section. The results of this analysis are presented in Figure 2-4. The specific energy of Jet A is 43.2 MJ/kg and since conventional
systems require no additional tank structure, this is the reference value which must
be surpassed.
6
2
1.5
1.5
3
2
45
30
25
45
2.5
35
20
15
1.5
10
1
0.5
0.5
0
45
1
2
Tank Radius (m)
3
40
35
0.5
2
1
00
20000 0
0
15000
00
10000
0
50000
1
2.5
3.5
30 25
2.5
300000000000
25
2000000
1500000
1000000
3
Tank Length (m)
3.5
40
5
4
10
20 15
30 25
35
40
4.5
3.5
20 151025
30
35
40
LCH4 Fuel System Specific Energy (MJ/kg)
5
45
x 10
4
3
500000
Tank Length (m)
4
3500000
2500000
4.5
500000
LCH4 Fuel System Usable Energy (MJ)
5
1
2
Tank Radius (m)
5
3
Figure 2-4: Non-Integral Tank Design: General Performance
The results in Figure 2-4 show the trades that exist as the geometry changes. The
weight of the fuel scales with O(r3 ) and O(r2 `) depending on whether the tank is
spherical or cylindrical, respectively. On the other hand the heat transfer scales with
O(r2 ) and O(r`) depending on whether the tank is spherical or cylindrical, respectively. Hence, specific energy of fuel tank system improves with increasing size. Also,
since the radius of the tank dominates the sizing analysis, for a fixed volume more
spherical tanks, or cylindrical tanks with minimal length are favored to minimize heat
loss. Additionally, insulation weight can be traded for the amount of fuel that is boiled
off and designs with larger boil-off waste can still be energy efficient on a system level.
Figure 2-4 further shows that constraints placed on the tank geometry resulted
in increased tank weight. This is compensated by LNG having 16% higher specific
31
energy than Jet A and allows the B737-800 wing root and cargo compartments to be
utilized for storage with the same overall specific energy as Jet A alone. Usage of
the outboard section of the wing adds excessive weight to the LNG storage system
due to the restrictive geometry. Since LNG has 39% lower energy density than Jet
A, the issue is exaggerated by the need for additional volume for the same amount
of fuel energy. If fuel is relocated out of the wing, additional structural penalties are
incurred due to the increased bending moment in the unloaded dry wing. If the wing
is oversized to incorporate the fuel, increased wetted area results in additional skin
friction. These limitations are true for most aircraft configurations and they make
non-integral tank designs unfavorable.
2.3.2
Integral LNG Tanks and Laminar Flow Promotion
Integral wing tanks designs, which use the existing wing box structure, were assessed
briefly in the late 70’s in the context of hydrogen fuel storage [35, 46]. Since the boiling
point of LNG (110K at 1atm) is well matched to promote laminar flow using wall
cooling at cruise, insulation requirements could be minimized. The fuel could be stored
as a boiling liquid with aerodynamic heating balanced by enthalpy sinked through
vaporization. With the vaporized fuel piped for usage, the liquid fuel temperature
could be assumed to remain constant.
The 2D boundary layer (BL) momentum equation near the wall (w) using conventional nomenclature is:
dµ ∂T ∂u dp
∂ 2u
ρvw −
+
= µw 2
dT ∂y ∂y ds
∂y
(2.4)
Suction (vw < 0) and wall cooling in air (dµ/dT > 0, ∂T /∂y > 0) have the same effect
as favorable pressure gradients (dp/ds < 0) in decreasing the boundary layer shape
factor. In addition, wall cooling has been observed to diminish the range of linearly
amplified frequencies and reduce the growth rate of frequencies [35]. The overall effect
is an increase in the critical Reynolds number and delay of Tollmien-Schlichting (TS)
32
wave instability dominated transition, typically observed at cruise. This however does
not apply to highly swept wings where cross-flow (CF) instabilities dominate or in
transition triggered by unavoidable surface discontinuities. Additional challenges lie
in flows with significant adverse pressure gradient as may be present on the upper
surface of the wing. This limits the possibility of laminar flow promotion on most
practical systems to the lower wing surface, which remains in constant contact with
the cryogenic fuel. The physics of the problem are complicated by the need to model
transition with consideration of non-isothermal flows. Instead a first order estimate
for the overall reduction in profile drag was made using the eN method. A preliminary
analysis of increasing Ncrit was performed using XFOIL1 , and about a 17% reduction
in overall skin friction drag was expected.
By analyzing the inverse design problem, assuming laminar flow on the lower wing
surface and turbulent flow on the upper wing surface, the insulation was sized to
match the fuel boil-off rate to the required fuel flow rate at cruise. Additional fuel
flow could be supplied via a small heating element with minimal power consumption
and without significant contribution to weight and complexity. In contrast to the
non-integral design that requires liquid fuel to be pumped or gravity fed, the fuel
is supplied in its vaporized form through self pressurization as it boils off. Since
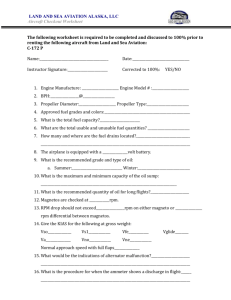
the laminar flow promotion was expected primarily for 2D BLs, the problem could
be solved numerically in 2D sections created at Gaussian quadrature points to allow
spanwise integration as illustrated in Figure 2-5.
The problem was addressed numerically by solving the steady heat equation given
in Equation 2.5 for the temperature T on a domain Ω ∈ R2 with Dirichlet (D) and
non-linear, solution dependent Neumann (N ) boundary conditions, on ΓD and ΓN ,
respectively.
1
XFOIL, Drela, M., MIT, Cambridge, MA. http://raphael.mit.edu/xfoil
33
Qturbulent
,•.-1eeconv,"ction
•
<if
Tu rbu lent
Flow
<
~
'l'
Insulation
I
Q ,ree conv,"ction
i - 1,}
ue
r
A
••
•
!
"
Bon.om
~
,
;, j - 1
i,j
1J.Yb
i
i,j+ 1
+ 1,j
Laminar Flow
Qlaminar
Figure 2-5: Integral Tank Design
∂T
∂n
∇2 T = 0
on Ω
T = TD
on ΓD
(2.5)
= TN f (TN ) on ΓN
The physical wing box was approximated as a hollow rectangular structure with a
lining of insulation material. The thin insulation material was modeled as the computational domain Ω. The interior boundary was assumed to be at a fixed temperature
of 110K, the boiling point of LNG. The thermal boundary conditions for the outer
surfaces were derived from expected cruise flight flow conditions.
The upper outer surface thermal boundary condition ∈ ΓD was determined for
forced convection on a flat plate with turbulent flow and an un-cooled starting length.
The lower outer surface thermal boundary condition ∈ ΓD was determined for forced
convection on a flat plate with laminar flow and an un-cooled starting length [5].
Assuming uniform heat flux, solutions for the local Nusselt number (Nux ) on a flat
plate with un-cooled starting length ξ were extended to the upper and lower outer
surfaces as shown in Equation 2.6
Laminar:
Nux =
hx x
kamb
=
Turbulent:
Nux =
hx x
kamb
=
34
0.453 Re0.5
Pr1/3
x
[1−(ξ/x)3/4 ]1/3
0.0308 Re0.8
Pr1/3
x
9/10
[1−(ξ/x)
]1/9
(2.6)
where, hx is the local convective heat transfer coefficient, kamb is the thermal conductivity of the fluid, Rex is the local Reynolds Number, Pr is the Prandtl for the
fluid and ξ is the un-cooled starting length. The average Nusselt number for free convection on a vertical flat plate of height ~ was estimated using the following empirical
correlation [5]:
h(Ts )~
=
Nu =
kamb
1/6
0.387 Ra~
0.825 +
[1 + (0.492/P r)9/16 ]8/27
!2
(2.7)
Where, h(Ts ) is the convective heat transfer coefficient for an isothermal wall with
temperature Ts . The isothermal assumption was required for simplification and would
result in non-smooth solutions near the outer corners and hence was only weakly
enforced. Ra~ is the Rayleigh number given by the product of the Grashof (Gr) and
Prandtl (Pr) numbers:
Ra~ = Gr~ Pr =
g β (Ts − Tamb ) ~3
Pr
ν2
(2.8)
Where, g is gravitational acceleration, β is the coefficient of volume expansion
(β = 1/T for ideal gases) and ν is the kinematic viscosity of the fluid.
The center tank was treated identically to the wing tank except for the top surface
of the centertank which was no longer exposed to the freestream. Heat transfer through
this surface was estimated assuming free convection for a horizontal isothermal flat
plate with the averaged Nusselt number empirically [5] given by:
Nu =
h(Ts )`
1/4
= 0.27 Ra`
kamb
(2.9)
Unlike the vertical plate, the characteristic length ` for the horizontal flat plate is
given by the ratio of the plate area to perimeter. Applying finite difference approx-
35
imations, the system of governing equations and boundary conditions above can be
converted to a non-linear matrix system of the form A(x) x = b, where x ∈ RM N is
the solution vector of discretized temperatures Ti,j given at nodes i, j of an M × N
grid, A(x) ∈ RM N ×M N is the discrete Laplacian operator matrix that is a function of
x since it includes the solution-dependent, non-linear Neumann boundary conditions,
and b ∈ RM N is a set of constants arising from Dirichlet boundary conditions.
Due to the non-linear nature of the boundary conditions, the Newton-Raphson
method (NRM) was used to iteratively find the roots of the corresponding discrete
residuals r(x) = b − A(x)x = 0.
Algorithm 2.1 Newton-Raphson Method
Estimate x(0)
for k = 1, 2, . . . do
Compute r(k) and J(k)
Solve J(k) δx(k) = −r(k)
x(k+1) = x(k) + δx(k)
Stopping Criterion: f (x(k) ) ∼
= f (x(k−1) )
end for
Each Newton step shown above requires solution of an M N × M N linear system
Jδx = −r, where r ∈ RM N is the residual vector and J ∈ RM N ×M N is Jacobian matrix
(k)
with entries defined as Ji,j (x(k) ) = ∂ri (x(k) )/∂xj
for i, j = 1, . . . , M N .
J was different at each iteration since its included the values of the residual derivatives evaluated at the current iteration. However, matrix J was always square and
sparse (banded) since the residuals were based on finite difference discretization using
a small local stencil. Hence, the sparse linear subsystem could be efficiently solved
using Gaussian Elimination. NRM convergence was obtained for a steady state solution when the net convective heat flow computed at the domain boundary matched
the net conductive heat flow through the domain interior. Hence the method could
converge despite the presence of large residuals near the interface of the forward/aft
and upper/lower boundaries where the problem was ill-posed. Typical results for conventional foam insulation (ρ = 39 kg/m3 , k = 0.033 W/mK) show insulation weight
requirements were only about 1% of the fuel weight since the insulation requirements
36
were only O(mm).
The true constraint for integral wing tanks is volume, since LNG requires 39%
more volume than Jet A for the same fuel energy. Hence maximum range of existing
tube-and-wing designs would be limited, even if application as a retrofit were viable.
However, in HWB configurations, the wingbox is not volume limited. This is due to
the presence of a thick mid-wing section not suitable for cabin usage due to height
constraints. Another serious issue not addressed here is the requirement to disable
wall cooling at low altitudes due to icing concerns. Solutions to this problem have
been proposed in other work [46], however additional consideration for the thermal
management system is also required.
37
Chapter 3
Hybrid Wing Body Aircraft Design
This chapter describes the methodology developed for conceptual design and assessment of the N+3 hybrid wing body aircraft, designated the H-series aircraft.
3.1
Mission Definition
The 2035 scenario analysis [12], which was based on historical trends as well as the
NASA specified performance goals and their potential fleet wide impact, set the highlevel mission definition for the N+3 aircraft given in Table 3.1. This scenario analysis
identified two high impact missions for the N+3 technology:
• Mid-size domestic transport in the 150-180 seat class, capable of U.S. transcontinental missions
• Long haul international transport in the 301+ class, capable of intercontinental
missions
The former mission represents aircraft like the B737 and A320 that form the largest
subset of the global commercial aircraft fleet. The latter mission represents aircraft like
the B777 and A340 that have significant fleet wide impact due to increased operational
productivity (payload × range). Because the potential N+3 vehicle configurations and
39
technologies optimize differently at the two high impact leverage points, both sets of
vehicle requirements were assessed.
The high-level aircraft design requirements are summarized in Table 3.1. For the
mid-size domestic vehicle the Boeing B737-800 was used as the current technology
baseline. For the long-haul international vehicle the Boeing B777-200LR was used as
the current technology baseline. These aircraft were chosen for their relatively high
fuel efficiency relative to other similarly sized aircraft.
Capacity
Design Range
Cruise Speed
Runway Length
Noise
Fuel Burn
NOx
Compliance
3.2
Table 3.1: N+3 Design Requirements
Mid-Sized Domestic
Long-Haul International
180 passengers
350 passengers
3000 nm
7600 nm
> Mach 0.72
> Mach 0.80
5,000 ft balanced field
9,000 ft balanced field
> 71 EPNdB cumulative reduction below FAA Stage 4
< 55 bD LDN at average airport boundary
70% below baseline aircraft
75% below CAEP 6
FAA and JAA safety standards, NextGen compatibility
Cabin Design
To achieve a step-change in fuel efficiency, the H-series designs require effective use of
the unconventional internal volume to minimize unused “white” space. To examine
the potential trade-off in performance with payload capacity, three aircraft cabins
were created by Ed Wen1 to span the passenger capacities highlighted in the design
requirements. The additional cabin represented an intermediate case.
For simplicity, the cabins were designed based on the SAX-40 outer mold line
(OML) since all the H-series aircraft used scaled versions of the SAX-40 centerbody.
The designs assumed that structural walls were periodically located along the width
of the cabin, running in the fore-aft direction. These walls allow the wing to efficiently
1
Structures Engineer, Aurora Flight Sciences, Manassas, VA.
40
react to internal pressure loads and were estimated to be 6 inches wide, which includes
4 inches structural width and 1 inch of insulation/paneling on either side. A trade
study was performed to determine the number of seats between the structural walls.
Economy seat combinations of 2-3 (e.g. MD-80) and 3-3 (e.g. B737, A320), where
the values signify the number of seats on either side of the aisle, were found to be the
most efficient grouping to be placed between the evenly spaced structural walls. The
layouts used either combination to maximize passenger capacity within the cabin. For
long range aircraft, economy seat widths were based on the A350 XWB (Extra Wide
Body), while short range aircraft were based on the A320. These are the widest of
any commercial aircraft in their class. Details of the cabins are presented in Table 3.2
while the layouts are compared in Figure 3-1.
G G ll
G: Galley
L : Lavatory
Business B
i
Class
Economy Class
H1: 180 PAX (1‐Class)
H1: 180 PAX (1
Class)
Business Cl
Class
First Class
First Class
Structural Walls
Economy Class
H2: 256 PAX (3‐Class)
H2: 256 PAX (3
Class)
Economy Class
H3: 354 PAX (3‐Class)
H3: 354 PAX (3
Class)
Figure 3-1: H-Series: Cabin Layouts
Unlike the domestic H1 aircraft, the long haul H2 and H3 aircraft cabins were
designed in a three-class configuration utilizing groupings of 2-3 seating in economy
class. The cabins were divided into two compartments with first and business class in
the forward section and economy class in the aft section. A cross-aisle located at the
41
Scale
H1
H2
H3
Table 3.2: H-Series: Payload/Range Definition
Reference
PAX
Revenue Cargo (m2 ) Range (nm)
B737-800
180 (1-Class)
3000
B787-8
256 (3-Class)
143
8300
B777-200LR 354 (3-Class)
194
7600
front of economy class served as the evacuation route. It also provided a secondary
ground servicing point for galley carts in addition to the forward servicing point for
first and business class. In all cases a centerline group of seats was utilized instead of
a centerline wall dividing the forward compartment because the latter would make it
difficult to locate galleys, lavatories and aisles in the nose section.
In addition to passenger and baggage payload, wide body aircraft utilize their belly
capacity to carry revenue cargo as shown in Figure 3-2.
Cargo/P
Paylod Weiight Fraction
60%
50%
40%
H2
H3
30%
20%
Single Class
Si
l Cl
Multi‐Class
H2
H3
10%
0%
0
20000
40000
60000
80000
Maximum Structural Payload (kg)
Figure 3-2: Revenue cargo capacity as a fraction of maximum structural payload for
varied aircraft sizes from single aisle to wide body aircraft
Available cargo volume of 143 m2 (22 LD3 containers and 4 LD7 Long Pallets)
was utilized in the H2 design for revenue cargo payload. In the H3 design, the cargo
compartment could accommodate 194 m2 (22 LD3 containers + 8 LD7 Long Pallets)
of revenue cargo volume. In both cases, the revenue cargo fractions were within typical
ranges shown in Figure 3-2.
42
3.3
Aircraft Design
The hybrid wing body design methodology utilized a modular design framework packaged into the HWBOpt Matlab program. The methodology consisted of a complete
aircraft system design loop wrapped in a global optimization routine. A large portion
of the system design analysis was leveraged from work on the Silent Aircraft Initiative (SAI), with details discussed in individual modules. As shown in Figure 3-3, the
design loop was organized to be modular by discipline to accommodate continuous
evolution of the program, while minimizing feedback loops.
Risks
TMPs
Final Configuration
no
Adjust Technology Selection, Configuration
Aircraft Development
HWBOpt
Generate 3D Planform
Technologies
Mission / Scenario
N+3 Goals
Size
Propulsion
Cruise Aero Performance
yes
Acceptable?
p
Evaluation against goals
Noise
LTO NOx
Fuel Burn
Bal. Field
Climate
Weight Estimation
Trimmed?
yes
Approach Analysis
l
no
Adjust Wing Twist
Fuel Burn Calculation
Take‐Off Analysis
no
Converged
Weight
yes
Stall Speed Analysis
Figure 3-3: H-Series: Design/Optimization Methodology (HWBOpt)
The analysis began with the specification of mission and technologies as discussed
in Section 3.1, which led to the detailed design of fixed cabins as discussed in Section 3.2. The design variables optimized by the system level global optimization loop
described the airframe planform, propulsion configuration, engine cycle and operating
environment and will be discussed in Subsection 4.1.2. For each input vector, the
43
design process began by lofting the planform into a 3D airframe that envelops the
pre-configured cabin. As will be discussed in Subsection 3.3.3, the aircraft weight was
estimated and used along with initial aerodynamic analysis to size the propulsion system for cruise thrust requirements. Performance of the propulsion system, which will
be discussed in Subsection 3.3.2, was then input into the cruise aerodynamic analysis to compute fuel burn, which will be discussed in Subsection 3.3.1. The cruise
analysis also required adjustment of the wing twist to trim the aircraft at the start
of cruise without control surface deflection or thrust vectoring as will be discussed in
Subsection 3.3.5. The new fuel estimate fed back to the initial weight estimate and
the design loop iterated until a converged statically stable design was achieved. This
was followed by off-design analysis that involved stall speed estimation for takeoff and
approach analysis, as was required to assess the N+3 metrics, and will be discussed
in Subsection 3.3.4. The inability to trim the aircraft or close the engine cycle at any
off-design condition resulted in a non-convergent design. The global optimizer, which
will be discussed in Chaper 4, iterated on the design variables with the objective function being defined by fuel burn targets. Additional trades with airframe noise were
also considered.
3.3.1
Aerodynamic Model
The quasi-3D aerodynamic analysis methodology, developed and validated to assess
SAX-40 [19, 20] and N2A/N2B [30, 47] airframes, was expanded for integration into
HWBOpt. The airframe lift distribution, induced drag and neutral point were computed for each lofted airframe, including twist and control surface deflection, using a
vortex-lattice analysis performed using AVL2 . AVL uses a Prandtl-Glauert correction
to capture compressibility effects and hence is limited to wing-perpendicular Mach
numbers below the transonic regime. The twist distribution was parameterized to
meet static margin (SM) limits (> 5%). Fuel burn optimization resulted in near elliptical span loading (including the centerbody) at cruise, as expected to minimize
2
Athena Vortex Lattice, Drela, M., MIT, Cambridge, MA. http://raphael.mit.edu/avl
44
induced drag. Profile, viscous and wave drag for the outer wing supercritical airfoil were computed offline with 2D viscous analysis using MSES3 at the cruise Mach
number and a representative Reynolds number of 2 × 107 . The resulting drag polar
was integrated as a lookup table of sectional drag as a function of sectional lift and
sweep shown in Figure 3-4. The figure shows the near step increase in drag due to
transonic drag rise at low wing sweep. This approach expanded upon the original
9% t/c supercritical airoil
Profile Drag
Viscous Drag
Wave Drag
Drag Coefficient Cd
0.08
0.06
0.04
0.02
1
0
60
0.5
40
Wing Sweep
(Deg)
20
0
0
Lift Coefficient Cl
Figure 3-4: MSES analysis for outer wing supercritical airfoil
implementation by capturing the effect of drag divergence on the outer wing airfoils
for wing sweep optimization. This 2-D approach is not applicable for the centerbody
due to the 3-D nature of the flow field. The centerbody profile and viscous drag was
computed using Hoerner correlations [40] for bodies of revolution with lift coefficient
dependence.
As part of the N+2 program, Boeing performed a CFD study using CFL3Dv64
on the untrimmed SAX-40F airframe (excluding winglets) with 7% thick outer wing
supercritical airfoils, operating at Mach 0.8 at 40000 ft altitude. Based on the recommendation of the N+2 study, the H-series aircraft outer wings were updated to
3
4
Multi-Element Airfoil Design/Analysis Software, Drela, M., MIT, Cambridge, MA
CFL3D Version 6, NASA Langley Research Center
45
a 9% thick airfoil for structural considerations. The N+2 study also computed the
drag divergence Mach number for SAX-40F as 0.83, which was set as the cruise Mach
numbers for the H-series aircraft. Both the SAX-40F airframe and cruise points were
similar to the H-series models, providing relatively high confidence in the applicability
of these results to the H-series designs. For the purpose of validation, the HWBOpt
aerodynamic model was used to assess the untrimmed SAX-40F airframe with no
winglets and with updated MSES lookup tables to include the 7% thick outer wing
airfoil. The different aircraft planforms and drag polars are compared in the Figure
3-5.
Longitudinal Coordinate (m)
0
10
0.04
0.035
HWBOpt
Boeing CFD
0.03
20
0.025
0.02
30
0.015
40
50
0.045
Coefficient of Drag CD
SAX-40 Planform
SAX-40F Planform
H3
Planform
-30
-20
-10
0
10
20
Lateral Coordinate (m)
0.01
0.005
30
0.2
0.25
0.3 0.35 0.4
Coefficient of Lift CL
0.45
0.5
0.55
Figure 3-5: Comparison of SAX-40, SAX-40F and H3.2 planforms (left) and Comparison of SAX40F (untrimmed, no winglets) HWBOpt Aerodynamic Model to Boeing
CFD analysis (right)
The comparison shows that at lower CL values both calculations yielded similar
results, within 2% difference at CL = 0.2348. Disparity in the results occurred only
at higher values of CL where the sectional Cl approached the stall regime for the
airfoil. As such, the associated 2D MSES analysis for separation was no longer reliable.
By ignoring transition and assuming turbulent flow in the domain, CFD analysis
encourages delayed separation and hence is not entirely applicable in that regime
either. The SAX-40F operated around CL = 0.26 at start of cruise, where as mentioned
previously, both methods were applicable and in good agreement. Since the H-series
designs also operated in a similar CL range at cruise, the HWBOpt aerodynamic
46
model was deemed to be suitable for such analysis. Since wing sweep was optimized,
the wing-perpendicular Mach numbers remain within the transonic regime where AVL
analysis is applicable.
3.3.2
Propulsion Model
The propulsion system model for the N+3 H-series aircraft and the resulting propulsion
system configurations (PROP) represent the work of N+3 team members Sho Sato,
Mark Drela, David Hall and Elena de la Rosa Blanco. Pertinent details of the model
and propulsion systems are given here, with additional detail provided in the N+3
final report [12].
All of the propulsion systems considered were aft-located and embedded for ingestion of the vehicle upper surface boundary layer to improve propulsive efficiency.
Boundary layer ingestion (BLI) by the engines could benefit the vehicle aerodynamic performance by eliminating kinetic energy dissipation in the wake and by reducing dissipation in the mixing of engine exhaust jet. The first effect comes from
the elimination of the wake defect itself through ingestion, while the second effect
comes from the reduction of jet kinetic energy required associated with the first effect. However, inlet pressure non-uniformity and distortion coming into the fan would
require innovative inlet designs. The ingestion of low kinetic energy flow (and hence
low total pressure flow) also increases the specific fuel consumption (SFC) of the engine. The rise in SFC with the amount of BLI through different span coverage of a
distributed propulsion system, leads to a trade-off between aerodynamic performance
of the vehicle and the efficiency of the propulsion system.
Embedding the propulsion allowed for more effective packaging of very high bypass
ratio engines without subsequent increase in wetted area and resulting drag. The configurations could be distributed using direct/planetary gears, bevel gears or electrical
transmission. The considered electric transmission system replaced the mechanical
transmission system between the low pressure turbine and the fan with a High Temperature Super Conductor (HTSC) generator and motor, cryocooler and inverter. The
47
system was enabled by the LNG heat sink used for weight reduction of the cryocoolers required to maintain superconductivity in the windings of generators and motors.
Major benefits of this technology to the performance of the aircraft include:
• Large boundary layer ingestion enabled by flexible distribution of propulsors
• Mechanical decoupling between fan and core
• Thrust redistribution between propulsors for vehicle control
The reduction of the fan diameter through distributing propulsion also leads to narrower exhaust ducts (higher length-to-diameter ratio) that are more effective at attenuating fan rearward noise using acoustic liners. In addition, smaller fans have higher
rotational speed giving rise to an increase in the blade passing frequency, which results
in noise that is more readily attenuated.
Table 3.3 provides the complete listing and Figure 3-6 graphically depicts some of
the propulsion system configurations with their corresponding transmission systems.
Table 3.3: H-Series: Propulsion System Configuration Options [12]
PROP
# Fans
# Cores
Transmission
1
1
1
direct/planetary gears
2
2
2
direct/planetary gears
3
3
3
direct/planetary gears
4
4
4
direct/planetary gears
5
4
2
bevel gears
6
6
2
bevel gears
7
8
4
bevel gears
8
9
3
bevel gears
9
12
4
bevel gears
10
5
3
electric
11
7
3
electric
12
10
3
electric
13
11
3
electric
14
12
3
electric
..
..
.
.
3
electric
..
.
100% span
3
electric
48
DIRECT / PLANETARY
BEVEL GEARS
ELECTRIC
3 Fans, 3 Cores
6 Fans, 2 Cores
12 Fans, 3 Cores
4 Fans, 4 Cores
9 Fans, 3 Cores
20 Fans, 3 Cores
Figure 3-6: H-Series: Sample Propulsion Configurations Illustrations [12]
For a given aircraft design and propulsion configuration, the engine was sized to meet
the cruise thrust requirements. During design optimization, it was assumed that the
propulsion could meet other off-design requirements such as takeoff and top of climb.
Post processing of the finalized aircraft included detailed off-design calculations using
the commercial software package GasTurb5 to check that the propulsion system could
meet all operational requirements.
A component-based turbofan model was developed by Prof. Mark Drela based
on the approach of Kerrebrock [23], with added models for turbine cooling flow and
cooling loss definitions. The design assumed clean flow in the engine core and engine
flows were treated as a mixture of semi-perfect gases with tabulated temperature
dependent specific heat data. The fuel was also treated as a semi-perfect gas, making
the heat released in combustion dependent on the state of both the air and fuel prior
to burning. This helped assess both Jet A and LNG fuels, since fuel temperature may
have a significant effect on cycle performance and thermal management of the entire
5
GasTurb, Gas Turbine Performance, Joachim Kurzke
49
aircraft system. The advances considered for the N+3 timeframe included:
• Advanced materials with higher allowable hot section temperatures to enable
higher bypass ratios and better propulsive efficiency
• Evolutionary gains in component performances assuming high efficiency even at
small core sizes
• Efficient turbine cooling schemes to reduce cruise fuel consumption
• Advanced Lean Direct Injection (LDI) combustors, currently under development
at NASA Glenn, to meet the N+3 LTO NOX goal without trading fuel burn or
carbon emissions
3.3.3
Structural Model and Weight Buildup
The weight buildup within HWBOpt was based on the models that were used to create
the SAX-40 designs [19, 20, 22].
Because of a lack of publicly available data for HWB designs, the structural weight
model for the HWB used a Response Surface Model (RSM) based on WingMod [51],
a proprietary multidisciplinary design and optimization code that has been used by
Boeing for blended wing body aircraft design. The RSM estimated the bare structural
weight as a function of design fuel weight, propulsion weight and planform area. The
RSM model did not take into consideration wing sweep and hence the structural
impact of varying Mach number could not be captured using this model. Some of
the HWB aircraft concepts that were created fall outside of the design range for the
RSM as it was originally intended. The RSM results were scaled by 70%, for the N+3
time frame. The scaling was optimistic and was based on the recommendation of N+3
collaborators considering the use of:
• Advanced materials: Carbon fiber reinforced polymer (CFRP) with short carbon
nanotubes (CNTs)
50
• Load alleviation: Gust load alleviation, flight envelope protection, predictive
path planning, and structural health monitoring
The payload for the H-series concept consisted of 215 lb per passenger (180 lb
per passenger with 35 lb of check baggage) with additional cargo payload based on
available cargo volume and average cargo density of 132.15 kg/m3 (8.25 lb/ft3 ).
The landing gear weight was estimated as a fixed 4% of the MTOW with additional fixed weight for the fairings. The weight of fixed equipment and furnishings on
the aircraft was estimated using Roskam’s correlations [36] for a Class II commercial
transport aircraft, based on the planform, cabin/cargo dimensions and payload. For
the design ranges under considerations, the majority of the fuel weight fraction was
represented by the cruise flight segment. Fuel weight for cruise was computed using
mean cruise SFC for continuous cruise climb. Initial climb fuel weight was estimated
as a fixed 2% of MTOW. Reserve fuel for an hour of flight at the end of cruise condition
and unusable fuel was also accounted.
The propulsion system weight buildup used various empirical weight models and
scaling laws developed by the N+3 team, summarized here for completeness. The
weight of the bare engine was estimated based on diameter and thrust scaling of
the Granta-3401 engine [8] from the SAX-40 aircraft. The engine components in the
Granta engine were separated into the fan and the core. The weight of the fan was
scaled based on its diameter, and the weight of the core was scaled based on the design
thrust generated by the engine at cruise. The weight of the nacelle and the exhaust
duct was computed based on Raymer’s [33] empirical correlation for military engine
inlets using fan diameter, duct length to diameter ratio, and the inlet geometry.
Since different transmission systems were assessed, different weight correlations
were established for each engine transmission system. The weight calculation of planetary gears used the correlation from the NASA GRC WATE++ [48] model. This
correlation related the weight of the transmission system with the fan mass flow and
core shaft power output at takeoff condition. The weight of bevel gear transmission
was based on scaling the torque carried by the transmission system, using the trans-
51
mission weight of the Granta-3401 as a baseline. Finally, the weight calculation of
the electric transmission system, which included the HTSC generator and motor, cryocooler, inverter was conducted using a weight correlation developed by the research
team [12]. This model used core shaft power and torque to compute the weight of
each component in the electric transmission system.
3.3.4
Operations Model
The flight segments assessed as part of the design included standard takeoff, balanced
field takeoff, begin cruise, end cruise, approach, and landing.
The takeoff field length and balanced field length calculation for optimization assumed quadratic dependence of thrust on velocity in order to analytically relate takeoff
velocity to distance. The force balance results in a system of first order ODE’s as discussed in the N+3 final report [12]. The drag for the airframe was computed using the
aerodynamic model already discussed, assuming a representative takeoff Mach number of 0.2. The balanced field length calculation was based on FAR-25 regulations,
accounting for the additional wind-mill drag [26] and trim drag required to balance
the spanwise asymmetric thrust moment from engine-out. Configurations with electrically distributed propulsion were assumed to circumvent the latter by redistributing
thrust as required. The takeoff analysis for noise was based on a first order time
marching solution assuming three segments: ground roll, instantaneous rotation, and
initial climb, using thrust vectoring for pitch trim.
The cruise analysis considered start of cruise and end of cruise with continuous
cruise climb between the two states assuming NextGen operations. The former governed the geometric twist distribution by requiring pitch trim without elevon deflection
or thrust vectoring as is discussed in Subsection 3.3.5. The altitude for the latter was
adjusted to maintain the same lift coefficient as start of cruise and required the aircraft
to be trimmable using only thrust vectoring. The static margin increased through the
cruise segment as the fuel weight was reduced and the CG moved forward, hence the
start of cruise point was used to ensure static stability and cabin angle of attack limits.
52
The tailless H-series design was trimmed at approach using a combination of thrust
vectoring and elevator deflection [17, 20]. In addition to trimming the pitching moment, the combination was used to increase the induced drag being generated by the
airframe, which enabled a steeper approach path. Directing thrust downward required
increasing elevator deflections to pitch trim the aircraft. This required a larger airframe angle of attack because the aft section of the outer wings was unloaded and
the thrust opposed lift. The increased lift was accompanied by an increase in induced
drag, and a steeper approach path was necessary for trim. This increased the distance
between the aircraft and the ground and reduced noise impact. Regulations require
the approach speed to not exceed 1.23 times the stall speed in the approach configuration. Hence the stall characteristics were enhanced using deployable drooped leading
edges instead of flaps to reduce airframe noise from the shedding of turbulence. In
addition, the engines operated at idle thrust to lower noise and reduce the amount
of drag generation required to trim the aircraft. Aircraft trim analysis was based on
steady approach conditions with aerodynamic forces computed using the HWBOpt
aerodynamic model.
3.3.5
Stability
Longitudinal static stability during cruise implies generation of required lift while
maintaining zero moment about the center of gravity (CG). Hileman et al. [18, 42]
described a procedure to attain this goal at the start of cruise for the tailless SAX
aircraft by adjusting the spanwise twist distribution scaling factor (T ) and cruise angle
of attack (α). The desired lift coefficient (CL ) and moment coefficient (CM ) about the
CG, were approximated to first order by a multivariate Taylor expansion about a
reference angle of attack (α0 ) and reference twist distribution scaling factor (T0 )
CL,Spec (α, T ) = CL,α0 ,T0 +
CM,Spec (α, T ) = CM,α0 ,T0 +
53
∂CL
∆α
∂α
+
∂CM
∆α
∂α
+
∂CL
∆T
∂T
∂CM
∆T
∂T
(3.1)
The solution to the linear system formed by Equation 3.1 gave the cruise angle of
attack and twist distribution scaling factor required to obtain the specified coefficients
of lift (CL,Spec ) and moment (CM,Spec ).
∂CL
∂α
∂CM
∂α
∆α
α
α
∆α
C
− CL,α0 ,T0
→ = 0 +
= L,Spec
∂CM
∆T
T0
T
∆T
CM,Spec − CM,α0 ,T0
∂T
∂CL
∂T
(3.2)
CL and CM along with derivatives with respect to pitch angle were computed explicitly
using AVL. The derivatives with respect to twist were approximated with finite differencing. This required AVL computation at two reference twist distribution scaling
factors T0 = [T (1)
(2)
∂CL
∂α(2)
∂CM
∂α
(2)
(1)
T (2) ], and the system was modified as follows:
CL −CL
∆α
T (2) −T (1)
(2)
(1)
CM −CM
∆T
T (2) −T (1)
CL,Spec − CL,α0 ,T (2)
α
α
∆α
→ = 0 +
=
CM,Spec − CM,α0 ,T (2)
T
T (2)
∆T
(3.3)
An additional AVL call was required once the twist distribution scaling factor was
computed, in order to estimate the location of the neutral point (NP) and determine
the static margin (SM).
As such, a total of three AVL calls was required to compute the required twist
distribution. Because the inner loop of the aircraft design methodology required iteration to calculate the fuel weight and this changed the CG location, three AVL calls
would have to be performed at every iteration. In order to reduce runtime, the lift
and moment coefficients and their derivatives were computed about the NP instead
of the CG after the first fuel weight iteration. The NP is defined as the location of
the CG where longitudinal static stability is neutral, (i.e., the net moment is constant
with respect to angle of attack). Hence, once the NP was computed it remains fixed
and the moment about any other point (including changing CG) could be computed
analytically at minimal computational cost. During the first fuel weight iteration the
(1)
two NPs: xNP = [xNP
(2)
xNP ], corresponding to each twist distribution in T0 , were also
54
output. For the second fuel weight iteration the NPs could be used as moment reference points for AVL and related quantities were scaled using Equation 3.4, where c is
the reference chord. CL and its derivative are independent of the choice of reference
point and remained unaffected.
CM,CG = CL
xCG − xNP
c
+ CM,NP
∂CM,CG
∂CL
⇒
=
∂α
∂α
xCG − xNP
c
+
∂CM,NP
∂α
(3.4)
From the third fuel weight iteration onward, CM,NP and its derivative could be scaled
to the CG as the reference point without requiring additional AVL calls. The original
system in Equation 3.3 could now be solved for the required twist distribution, without
the need of further AVL calls, since all of the lift and moment coefficients about the
CG and derivatives were known. AVL calls consumed >90% of the computational
runtime for an average computation requiring 5-10 fuel iterations. Using the NP
based twist computation, the reduction of the number of AVL calls contributed to a
40-50% reduction in runtime.
55
Chapter 4
Global Optimization Setup
This chapter describes the design philosophy employed for the H-series aircraft, to
optimize the airframe, propulsion and operations simultaneously.
4.1
Problem Definition
The general design optimization problem for objective function J can be written as:
minimize
J(x)
subject to gj (x) ≤ 0
j = 1, . . . , m
(4.1)
i = 1, . . . , n
≤ xi ≤ xmax
xmin
i
i
where, x ∈ Rn is the vector of design variables bounded by xmin , xmax ∈ Rn and g(x)
is the set of m inequality constraints.
4.1.1
Objective Function
The objective function for the H-series aircraft was the fuel burn computed at the
maximum design payload and range, which also partially addressed combustion emissions implicitly. The fuel burn metric considered was Payload Fuel Energy Intensity
(PFEI) [15]. PFEI is defined as the fuel energy required per aircraft productivity (pay-
57
load weight × range) and allows for comparison of fuel burn for different fuel types
and missions. Noise assessment from all sources at all design segments was computationally prohibitive since it requires detailed off-design engine cycle analysis, aircraft
trim computation and acoustic computation. Instead, the airframe noise at approach
was computed and examined as a second objective. This favored design for reduced
stall speed since airframe noise scales with the 5th or 6th power of approach speed,
which is limited by regulation to 1.23 × stall speed. Because decreasing the wing
loading by increasing wing area (and consequently weight) can also be used to lower
the aircraft stall speed there is a potential trade-off between airframe noise and cruise
performance. Designs were not explicitly optimized for NOX (or other emissions) and
those goals were addressed at a higher level through architecture, fuel and technology
selection.
PFEI @ Max. Design Payload and Range
J(x) =
Airframe Noise @ Approach
4.1.2
(4.2)
Design Variables
The mission-dependent PFEI, as set by the N+3 scenario, is a non-linear function of
the airframe geometry, propulsion system, and flight profile. The approach noise is
governed by the wing-loading, maximum lift coefficient and the approach flight profile,
which are also governed by the same variables.
These design variables, which are shown in Figure 4-1, were optimized to achieve
the final design. The HWB planform was specified using 6 variables that uniquely specify the outer-wing planform and allow partial modification of the centerbody. The scale
of the centerbody was set by the fixed geometry of the cabin box. The overall spanwise
twist distribution was considered piecewise linear and specified by 3 additional variables. The twist distribution was scaled during the design process to achieve desired
lift and static longitudinal stability characteristics. The engine cycle was uniquely
specified by 4 engine parameters at the design point (OPR,FPR,Tt4 /Tt2 ,PROP) plus
58
Propulsion:
FPR
OPR
T /T
t4 t2
xle3
xle5
PROP
cho9
span
ale1
cho5
Fixed
Cabin
Operations:
hCEN
Figure 4-1: H-Series: Global Optimization Design Variables
the BPR and cooling flow rate. PROP specifies the propulsion configuration from a
list which includes all the permutations on number of fans, cores and transmission
systems as was given in Table 3.3. The BPR for minimum SFC was computed by
solving an optimization sub-problem during the engine design process. Tt4 /Tt2 at
take-off was set to its cruise value assuming the use of variable area inlets and used
to compute the required cooling flow rate. This assumption was relaxed post optimization to reduce take-off noise. Since performance during the cruise flight segment
has the largest impact on the PFEI, start of cruise altitude, hCBN , was also considered
a design variable. The end of cruise altitude, hCEN , follows from the assumed cruise
Mach number, the assumed cruise lift coefficient and the weight change over the cruise
segment.
4.1.3
Design Parameters
Design parameters, the quantities that affect the objective function but are preset
to desired values, were selected based on design choices or apriori knowledge. The
airfoil stack was fixed and the scale of the centerbody was preset based on the cabin
box design. Though impact of payload was a research focus, the number of passengers was not a design variable since parametric cabin design for the HWB airframe
59
is complicated by the unconventional interior geometry. The design range was set by
the payload based on comparable existing aircraft and the N+3 mission definition.
As discussed in Subsection 3.3.1, the cruise Mach number was set to 0.83 based on
a Boeing CFD study on the drag divergence Mach number of the SAX-40F aircraft,
not taking into consideration structural tradeoffs. The fuel could be selected to be
either conventional Jet A or LNG. The latter enabled turboelectric propulsion options with cryogenic engine cycles and laminar flow on the bottom of the outer wing;
however, the use of LNG would also require additional fuel volume, insulation weight
and introduced risk. Another parameter was the overall technology level, which could
be set to current or advanced. The current technology parameter used efficiency and
weight estimation models for present day propulsion systems and airframe structures
whereas the advanced technology parameter was based on predicted values for the
N+3 timeframe.
4.1.4
Design Constraints
To bound the multidisciplinary global design space, system level constraints shown in
Equation 4.3 were established based on the mission definition and operational constraints. Since the airframe planform geometry and twist distribution were design
variables, longitudinal static stability of the aircraft was enforced through constraints
on the static margin. The cruise angle of attack and consequently the cabin floor angle
were also constrained for passenger comfort. Consideration of different fuels required
strict enforcement of wing fuel volume constraints. The metroplex operational scenario
required utilization of existing secondary airports for short haul domestic missions and
primary airports for long haul international missions, which set the corresponding field
length constraints. Taxiway width restrictions set airframe span constraints that were
also enforced based on ICAO Annex 14 standards. Span constraints of 36 m (ICAO
Code C) satisfied by the B737-800 could not be satisfied by the H1 configuration since
the spanwise extended cabin results in a larger wingspan for the HWB airframe compared to the tube and wing airframe. Hence, the constraint in that case was relaxed
60
to the next larger aerodrome class (ICAO Code D) with 52 m wing span allowances.
Both the H2 and H3 fall under the 65 m span limit for ICAO Code E airports based on
B787 and B777 operations. Designs limited to airports that handle A380 type aircraft
were considered contradictory to the N+3 metroplex mission and were not considered. Additional constraints were incorporated to ensure non-degenerate planform
geometries and solutions within bounds of disciplinary modeling fidelity.
Static Margin ≥ 5%
o
o
−3 < Cabin Floor Angle < 3
o
o
−1 < Root Twist < 1
g(x) =
Span ≤ 52 or 65m
Balanced Field Length ≤ 5000 or 9000ft
Max. delta Pressure Coefficient ≤ 1
Wing Volume ≥ Fuel Volume
4.2
Static Stability
Passenger Comfort
Passenger Comfort
Airport Requirements
(4.3)
Airport Requirements
Model Fidelity
Fuel Storage
Optimization Method
Initial manual exploration and gradient based optimization for the H-series designs
revealed sensitivity to the starting guess, with several regions of infeasible and nonconvergent designs. Optimized solutions at different aircraft scales were also observed
not to be within some local vicinity of each other. This indicated that the problem was
highly non-linear, as expected for the multidisciplinary system level analysis. Hence
gradient based optimization approaches yielded only local minima in a small neighborhood of convergent starting solutions. Also, since the combined HWB airframe-engine
design landscape is largely uncharted, the research objectives favored optimization
frameworks that focused on global search.
The solution space was characterized by islands of feasibility created by imposing multiple non-linear constraints on the airframe combined with the exploration of
an exhaustive set of propulsion configurations and cycles. The inclusion of discrete
propulsion configuration choices resulted in a mixed-integer programming problem
61
that is known to be NP-complete, non-deterministic polynomial-time complete, and
formally intractable. The highly multidisciplinary nature of the analysis resulted in
several non-convergent designs due to the inability of the individual design modules
to run for all of the test cases. Both these attributes introduced non-smoothness in
the solution space but with no measure of the objective for non-convergent designs.
Since the gradient/Hessian information required for efficient implementation of most
deterministic approaches was not available as part of the design computation, the
inability to converge several cases would hinder its estimation in those regions. In addition, deterministic search of the non-smooth space would require apriori knowledge
of the target design space or full-factorial expansion of the discrete variables. The
former was unavailable for such an unconventional advanced concept and the latter
was computationally prohibitive for the large number of propulsion configurations.
Additionally, since neither could address the large regions of non-convergence, the use
of a heuristic optimization method was favored. The focus on global optimization
favored population based search in order to better explore the design landscape while
simultaneously assessing multi-objective trade-offs. Based on these considerations, a
hybrid multi-objective genetic algorithm (MOGA) was used with initial designs chosen using uniform Monte Carlo sampling of the design space. Since the MOGA is
not provably convergent, the hybrid nature involved gradient based optimization as a
post step to ensure local optimality through satisfaction of the Karush-Kuhn-Tucker
(KKT) conditions. This second tier optimization used Sequential Quadratic Programming (SQP) and required elimination of the discrete propulsion configuration variable
PROP to ensure smoothness of the solution space. The two tier hybrid optimization
approach was matched to the multi-objective, mixed integer, non-smooth, non-linear
programming problem and other viable approaches for this class of problem were not
explored.
62
4.2.1
Genetic Algorithm
The genetic algorithm (GA) is a heuristic population based optimization method which
is a particular class of evolutionary computation inspired by evolutionary biology. A
modified version of Matlab’s genetic algorithm tool was used and observed to perform robustly on this problem. Most notably, the population based optimization was
well matched to evolution of design modules by allowing incorporation of previous
optimal designs over the development cycle. Additionally, the algorithm is naively
parallelizable to compensate for any undue computational burden.
The constraints in the problem were incorporated using an exterior quadratic
penalty method to penalize constraint violation through the objective function without
introducing additional non-smoothness.
minimize
φ(x) ≡ J(x) +
Pm
j=1
Mj max [0, gj (x)]2
subject to xmin
≤ xi ≤ xmax
i
i
for fixed
i = 1, . . . , n
Mj 0
(4.4)
j = 1, . . . , m
In the limit M → ∞, this approach converges to the original formulation, however,
it allowed relative weighting of different constraints and relaxed strict enforcement of
feasibility. This also allowed for quantification of fitness φ of all individuals in the
population, taking into account feasibility.
The elitist single-objective GA optimizes a population of N individuals (containing
Ne elites) over k successive generations of evolution, until fitness is optimized by
meeting some ad-hoc convergence criteria. This process is illustrated through the
simplified pseudo code in Algorithm 4.1.
The multi-objective implementation is similar but uses a controlled elitist genetic
algorithm. Whereas the elitist GA favors the fitter individuals (lower φ), the controlled
elitist MOGA favors individuals that help improve population diversity (in the function
or design variable space) in order to converge to an optimal Pareto front [9].
The individuals in the population were represented by chromosome strings of fixed
63
Algorithm 4.1 Elitist Genetic Algorithm
Initialization {Select initial population of N individuals}
Function Call {Evaluate fitness φ of each individual}
for i = 1 to k generations do
Elitism {Retain Ne fittest individuals from previous generation unaltered}
Selection {Stochastic fitness based picking of population subset for breeding}
Crossover {Recombination of selected parents to generate children}
Mutation {Maintain genetic diversity by randomly altering some individuals}
Function Call {Evaluate fitness of each individual in new population of size}
Convergence Criterion {Overall fitness,time limit,etc.}
end for
length. A common choice is encoding the design variables into binary (0,1) strings of
length B as shown in Equation 4.5.
x = [x1
x2
. . . xn ] = 011010
. . . 1010}
|
{z
length B
n max
min
X
xi − xi + 1
/ ln 2
B=
ln
∆xi
i=1
(4.5)
The minimum size of the initial binary encoded population required to make every point in the resulting subspace reachable by crossover alone with probability P
(=99.99%) is given by Reeves [34] as:
Nmin ≈ d1 + log(−B/ log P )/ log 2e
(4.6)
This population size grows as O(log B), which implies lower computation cost
compared to the general higher cardinality q-ary alphabet (q > 2) encoding where the
population size grows linearly with q. It was also noted that this estimate is typically
lower than the common rule of thumb where Nmax ≈ 4−5B. The algorithm implementation used intermediate population sizes typically selected to balance computational
cost per generation with the total number of generations of evolution required for convergence. The total number of unique populations Np attainable by a binary encoded
population of size N is given by:
64
B −1
Np =N +2
⇒ Np ≥
CN =
(N +2B −1)!
(2B −1)!N !
(Nmin +2B −1)!
(2B −1)!Nmin !
(4.7)
By discretizing the solution space to acceptably coarse precision ∆x machine ⇒
B Bsingle precision , the resulting solution subspace can be significantly smaller than if
represented in single precision floating point. This subspace still contains the optimal
solution (up to the desired accuracy) and can be more efficiently searched. Since the
solutions of this problem were not required up to machine single precision, binary
encoding was favored to alternative real-valued encodings.
Consider the Markov transition matrix P ∈ RNp ×Np , where Pij is the probability
of transitioning from the ith population to the j th population. Proof of convergence
by Markov chain analysis requires that the chain is ergodic and irreducible (any state
is accessible from any state). Since Np is typically large, P could not be explicitly
computed. However, Rudolph [38] proved that in general, the canonical GA without
elitism is non convergent, since the optimal solution, if found, could be lost through
crossover and mutation. Hence an Elitist GA was used, with Ne = 2 for all single
objective applications. In the multi-objective variation, Pareto optimal solutions are
designated elite and retained until superseded.
Ideally, individuals in the initial population would be seeded with solutions in the
vicinity of the global optimal or normal distributions of design variables based on apriori knowledge of optimal variable means and distributions. Since neither were typically
available for most design cases, the initial population was created with a Monte Carlo
approach using constrained random search (CRS). The approach iteratively increased
the sample size of a randomly generated population until the number of convergent
designs satisfying the geometric constraints was of adequate size. This ensured that
all population seeds were convergent (not necessarily feasible) and spanned the design space without the inclusion of geometrically degenerate designs. Sampling of
most design variables was performed using uniform distribution, which was critical for
thorough assessment of the discrete propulsion configurations (PROP). Design vari-
65
ables like xle3 (Refer Figure 4-1) with expected Gaussian behavior due to fixed cabin
geometry were sampled as such.
The procedure for picking individuals for crossover was tournament selection. Two
individuals are selected at random and the fitter of the two is selected to be a parent.
The deterministic outcome of the tournament favors fitter individuals while stochastic selection of competitors helps maintain genetic diversity. According to Spall [43],
empirical evidence suggests tournament selection performs better than other popular choices like roulette selection. The selected parents reproduced by single-point
crossover, where genetic material is swapped at a randomly selected crossover point
as illustrated.
110|010110 ⊕ 010|100100 → 110|100100 and 010|010110
{z
}
|
{z
}
|
Parents
(4.8)
Children
In order to expand the search beyond interpolations of the initial designs obtained
through crossover, chromosomes were randomly mutated. This was done by flipping
bits of the chromosome of a fixed percentage of the population with a probability
Pm . Rudolph [37] proved that the Markov chain approach yields convergence when
0 < Pm < 0.01, though the typical rule of thumb is Pm ≤ 0.05. Since the solution
space was highly non-linear and disjointed, Pm was selected to be 0.0099 to allow
more exhaustive global search. Though within Rudolph’s bound, this choice does not
guarantee convergence without explicit computation of the Markov transition matrix,
not tractable here.
The stopping criterion for the GA is not well defined since the KKT conditions are
not applicable. Hence stagnation is typically considered convergence, (i.e. marginal
or no improvement of the objective over successive generations). For this analysis
stagnation over 50 generations was considered convergence.
66
4.2.2
Sequential Quadratic Programming
The hybrid nature of the overall optimization methodology incorporated gradient
based sequential quadratic programming (SQP) [10] for refinement of the Pareto front
extrema. This step ensured thorough local search and satisfaction of the necessary
optimality conditions for a constrained optimization problem though the KKT conditions which include solution feasibility and zero gradient of the Lagrangian L.
minimize
L(x, λ) ≡ J(x) +
Pm
j=1
λj gj (x)
subject to xmin
≤ xi ≤ xmax
i
i
= 0, g (x) < 0
j
λj =
≥ 0, g (x) ≥ 0
j
i = 1, . . . , n
(4.9)
j = 1, . . . , m
Unlike the external quadratic penalty function approach used for GA constraint
handling, the SQP approach estimates Lagrangian multipliers λ to penalize constraint
violation. When KKT conditions are satisfied, the Lagrange multipliers (computed in
a least squares setting) quantify local sensitivity of the objective to changes in active
constraints around the SQP optimum.
KKT: ∇L(x∗ , λ∗ ) = ∇J(x∗ ) +
Pm
⇒ λ∗j ∼
= −∂J(x∗ )/∂gj (x∗ )
j=1
λ∗j ∇gj (x∗ ) = 0
(4.10)
SQP creates a local quadratic approximation of the Lagrangian and the solution
is iteratively updated. The search direction is computed by solving the associated
quadratic programming (QP) subproblem. The step length is estimated using line
search to produce a sufficient decrease of a seperate merit function created using a
external penalty method for the non-linear constraints. The required gradients were
estimated using finite difference approximations and the approximated Lagrangian
Hessian H was iteratively built-up starting from the identity matrix. Matlab’s fmincon
67
algorithm was used, with Broyden-Fletcher-Goldfarb-Shanno (BFGS) Hessian update.
The process is illustrated through the simplified pseudo code in Algorithm 4.2.
Algorithm 4.2 Sequential Quadratic Programming
for k = 1, 2, . . . do
Solve quadratic subproblem for search direction dk :
minimizedk dT H(xk )d/2 + ∇J(xk )T d
subject to ∇gi (xk )T d + gi (xk ) ≤ 0
i = 1, . . . , m
Compute step length α using line search to decrease merit function
Update solution: xk+1 = xk + αdk
Compute Hessian update Hk+1 , using BFGS
Check KKT conditions for convergence
end for
For the unconstrained problem, the local behavior of the objective J in the neighborhood of the optimum solution x∗ can be approximated using a quadratic Taylor
expansion for an arbitrary search direction d, step size α and Hessian H
J(x∗ + αd) ∼
= J(x∗ ) + ∇J(x∗ )αd + α2 dT H(x∗ )d/2
Optimality: ∇J(x∗ ) = 0
(4.11)
⇒ J(x∗ + αd) ∼
= J(x∗ ) + α2 dT H(x∗ )d/2
∗
Setting d to eigenvectors vj of H(x∗ ), with eigenvalues λeig
j , such that H(x )vj =
∗
λeig
j vj , the expression for J in the space surrounding x can be updated as:
eig
J(x∗ + αvj ) ∼
= J(x∗ ) + α2 λj /2
(4.12)
Hence, the sign of the eigenvectors of the Hessian determines the local change of
the objective function. In addition, the contours of J around x∗ can be approximated
by ellipsoids with principal axes in the directions of the eigenvectors and principle
axes lengths inversely proportional to the square roots of the eigenvectors. If the
Hessian is well conditioned, κ(H(x∗ )) = O(1), the principal axis lengths will be the
68
eig
same order of magnitude since λeig
min ≈ λmax and the contours will be near circular. If
the Hessian is ill-conditioned κ(H(x∗ )) O(1), the contours will be highly skewed
eig
ellipsoids since λeig
min λmax . Gradient based search of the resulting space will be less
efficient and with potentially increased numerical errors. To assess conditioning, the
diagonal entries of the Hessian were estimated with a second order accurate central
difference about the stagnated MOGA solution:
∂ 2J
J(x + ∆x) − 2J(x) + J(x − ∆x)
=
+ O(∆x2 J iv (x));
∂x2
∆x2
(4.13)
To minimize computational errors, the required step size ∆x was approximated
2
as 0.25
machine ∆x such that the rounding errors machine J(x)/∆x were the same order of
magnitude as the truncation errors ∆x2 J iv (x).
In order to address ill-conditioning, the design variables were scaled using a nonsingular transformation y = Lx, leading to an updated Hessian of the form LT HL ≈ I.
p
This required scaling factors Li,i ≈ 1/ O(Hi,i ). This rescaling was based around a
single point for the unconstrained problem and hence the Hessian was only approximated by the order of magnitude of its diagonal entries to minimize any scaling bias.
It is to be noted, that the actual objective and constraint values obtained are identical
for both unscaled and scaled problems, though the design landscape is much better
conditioned for the latter.
69
Chapter 5
Global Optimization Results
This chapter presents the results and assesses the trade space from the H-series global
optimization analysis. The results focus on payload-range scalability relative to fuel
burn and airframe noise trades and the impact of constraints for the following cases:
• 3 Payload/Range Scales: H1, H2 and H3 (see Table 3.2)
• 2 Fuels: Jet A and LNG
All compatible N+3 advanced technologies were also incorporated into the design
including structural weight improvements and advanced propulsion systems. Some
of the technologies were dependent on the fuel choice since LNG enables electrically
distributed propulsion, laminar flow promotion on the outer wing bottom surface and
alternative gas turbine cycles.
The HWBOpt framework was used for optimization of each case separately. Based
on ICAO regulations, the span constraint was set to 52, 65, 65 m, for the H1, H2,
and H3 respectively. The corresponding take-off constraint was set to 5000, 9000,
9000 ft, for the H1, H2, and H3 respectively. Figure 5-1 shows the results of the
first tier multi-objective optimization using the MOGA to assess the trade space of
PFEI and airframe noise at approach. The MOGA extrema for PFEI were locally
re-optimized using gradient based SQP optimization. The GA ensured solutions were
in the vicinity of the global optimum while the SQP ensured that designs satisfied the
71
KKT conditions for local optimality. Figure 5-1 shows a broad range in performance
attainable based on the design objective, payload/range scale and fuel choice.
92
H1 ‐ Jet A
H1 ‐ LNG
H2 ‐ Jet A
H2 ‐ LNG
H3 ‐ Jet A
H3 ‐ LNG
88
86
0
Airframe Noise @ 3 Approach (EPNdB)
90
84
82
80
78
2.5
3
3.5
4
4.5
5
PFEI (kJ/kg‐km)
5.5
6
6.5
Figure 5-1: H-Series: Pareto optimal designs at all scales for Jet A and LNG
The propulsion system for nearly all designs was optimized to a 2 core, 4 fan architecture. Although BLI improves the aerodynamic performance of the aircraft, it
also degrades propulsion system performance. In addition, the chord length decreases
rapidly in the spanwise direction away from the aircraft centerline, providing diminishing returns for increased spanwise fuselage BLI coverage. Hence, the optimal amount
of BLI was found to occur at less than complete fuselage span coverage which could be
obtained using a beveled gear transmission system with lower weight than the electrical system. The mechanical design drove the propulsion system to a design with fewer
fans. Increased engine component efficiencies, associated with larger core size, drove
to the design to the minimum allowable value of two cores. The elimination of the
72
electrical transmission system, based on BLI and weight considerations, also resulted
in under utilization of the LNG heat sink, which could lead to new opportunities or
penalties not considered here.
Additional factors not considered in detail in this work are acquisition and operating costs. Gross take-off weight is the typical surrogate for the former. Though the
latter is typically not well correlated, PFEI serves as a preliminary surrogate since it
represents fuel prices. Not considered are infrastructure and development costs, both
of which may play a significant factor in adoption of LNG as an aviation fuel.
To expand on the results, a detailed analysis of the performance fundamentals
is first presented in Section 5.1, followed by an assessment of the individuals trades.
Payload/range scaling trades for PFEI will be discussed in Section 5.2. The fuel choice
trades for PFEI will be discussed in Section 5.3. Section 5.4 will discuss the results
and scale/fuel specific trade-offs between PFEI and airframe noise at approach for the
final designs.
5.1
5.1.1
Performance Fundamentals and Trades
Fundamentals of PFEI
The PFEI optimization objective is defined in Equation 5.1.
PFEI =
WF LHV
R WP
(5.1)
The PFEI is impacted by trades embedded in the Breguet range equation, modified
for BLI during SAI [41], as shown in Equation 5.2
v
L
R=
ln
g SFC ψD
WE /WM T OW
1
+ WP /WM T OW + WR /WM T OW
(5.2)
The HWB can be modeled as a simple cambered wing with an offset parabolic drag
polar of the form CD = CDmin + K(CL − CLminD )2 , where K = 1/πeAR with Oswald
73
efficiency factor e and aspect ratio AR. For steady level flight (L = W and F = ψD),
the cruise wing loading and lift-to-drag ratio can be directly related.
2
1
q(CDmin + KCLminD
) K WM T OW
1 F
=
=
+
− 2KCLminD
ψW
L/D
WM T OW /S
q
S
(5.3)
More simplified consideration, using the identity WM T OW /S = 0.5γpMa2 CL , shows for
a fixed Mach number and lift coefficient, there is an optimum wing loading associated
with the cruise altitude. The optimum altitude based on aerodynamic considerations,
occurs where lower altitude increases drag on the fixed centerbody and increased
altitude increases induced and profile drag on the wing. The equations show that the
PFEI is governed by the following:
• Mission definition: Payload, WP ; range, R; cruise velocity, v
• Propulsion: Engine specific fuel consumption, SFC
• Airframe aerodynamics: Airframe lift/drag, L/D
• Airframe/propulsion interaction: ψ, defined as the ratio of net required thrust
to total airframe drag without BLI
• System weights: Empty weight fraction, WE /WM T OW ; payload weight fraction,
WP /WM T OW ; reserve fuel weight fraction, WR /WM T OW
• Fuel: Fuel weight, WF ; fuel lower heating value, LHV
The mission payload and range were evaluated for three discrete design points: H1,
H2 and H3 as described in Table 3.2. The cruise Mach number for each of the aircraft
was set to 0.83 for this analysis. The cycle performance plays a significant role through
the SFC which can have varying effect on the fuel weight, depending on the range and
associated fuel weight fraction. Irrespective of the range, all the subsystem weights
are interlinked since weight increases compound to impact the overall system. BLI
reduces ψ, improving the corrected lift to drag ratio but increases the SFC as discussed
in Subsection 3.3.2. The reserve fuel weight fraction was negligible for the ranges being
74
considered, relative to the payload weight fraction and the empty weight fraction, and
had limited impact on PFEI. Low empty weight fractions are favorable but were
constrained by the ability to efficiently use the unconventional geometry of the HWB
and reduce “white” space.
5.1.2
Fundamentals of Airframe Noise at Approach
In order to assess the second optimization objective, the airframe noise at approach,
the stall speed was examined because sound pressure levels of airframe noise sources
at approach scale with inverse square of the distance to the observer and either 5th or
6th power of the approach velocity, depending on source. To minimize airframe noise
at approach, the approach velocity uapproach was set to the minimum allowable (FAR
25.125) of 1.23 times the stall speed.
uapproach = 1.23 × ustall
(5.4)
If the analysis is simplified to a steady level flight profile excluding thrust vectoring,
the stall speed ustall of the aircraft at approach is governed by the wing-loading at
approach WApproach /S and maximum lift coefficient CLmax . S is the planform area and
ρ is the air density.
s
ustall ≈
2 WApproach 1
ρ
S
CLmax
(5.5)
The maximum lift coefficient depends on the wing geometry, airfoil, flap/slat configuration and Reynolds number. All of the designs assessed operated in comparable
subsonic approach regimes with identical airfoils and slats. The dominant driver was
the wing geometry, and the cosine square scaling of mid-chord sweep, Λ. The offline stall-speed estimation, using XFOIL, captured sectional sweep effects for a fixed
representative Reynolds number.
Wing loading during the approach configuration is a consequence of the planform
area sized for the entire mission (not just approach) and system weights based on
75
gross take-off weight and cruise fuel weight. The planform area has a direct effect on
the airframe aerodynamics through both the lifting surface area and skin friction drag
based on wetted area. The RSM structural model incorporated in HWBOpt is based
on planform area, design fuel weight and propulsion weight, approximately capturing
the coupling between the wing-loading and empty weight fraction. The wing loading
at approach can be rewritten with the system weight fractions shown in Equation 5.6.
WApproach ∼ WE + WR + WP
WM T OW
=
=
S
S
S
WE
WM T OW
+
WR
WM T OW
+
WP
WM T OW
(5.6)
These equations show that the second objective, the airframe noise at approach, is
governed by the following:
• Airframe Geometry: Wing loading ,WMTOW /S; wing sweep, Λ
• Airframe aerodynamics: Maximum lift coefficient, CLmax
• System weights: Empty weight fraction, WE /WM T OW ; payload weight fraction,
WP /WM T OW ; reserve fuel weight fraction, WR /WM T OW
5.1.3
Fundamental Trade Space of PFEI and Airframe Noise
at Approach
Based on this simplified analysis, it is observed that airframe corrected lift to drag ratio, which affects PFEI, is coupled with the wing sweep and wing loading, which affect
the approach airframe noise. This results in a possible trade between the aerodynamic
and acoustic performance. The choice of a fuel with higher specific energy reduces fuel
weight and overall system weight, supporting both PFEI and noise goals. However, it
is also to be noted that trades for alternative fuels may often lie outside the aircraft
performance space, with economic considerations, infrastructural requirements, safety
regulations and development risks being of considerable importance.
76
5.2
Payload and Range Scalability
This discussion focuses on the optimization objective of PFEI and how it changes
with payload and range. PFEI, which as indicated in Equation 5.1, favors increased
productivity (payload × range) for a given fuel weight. This introduces a potential
trade between increased payload and increased range, which is typically addressed in
the mission definition based on the target route, desired flight frequency and operating
cost trades. At first glance, the Breguet equation suggests increases in both payload
and range result in proportionally higher fuel weight and correspondingly higher PFEI.
Increased range often can be achieved without significant PFEI change, since the the
required fuel can be held with a moderately larger wing with associated aerodynamic
and structural impacts. However, the trades are more complicated for increased payload, since most subsystems scale with the airframe size, each according to a unique
scaling law. Increasing the payload may introduce new constraints, but it may also
create new opportunities for design optimization.
The final performance results from SQP optimization of the MOGA PFEI extrema,
along with the governing parameters for PFEI from Subsection 5.1.1 are shown in Table
5.1 along with airframe planforms shown in Figure 5-2.
Table 5.1: H-Series: Payload/Range Scalability Effect on PFEI
H1
H2
H3
Fuel
Jet A
LNG
Jet A
LNG
Jet A
LNG
PFEI (kJ/kg-km)
4.08
4.08
3.02
2.67
2.83
2.62
SFC (g/kN-s)
15.10
13.29
14.41
12.44
13.95
12.32
L/D
22.1
23.1
24.4
26.1
24.1
25.2
ψ
0.80
0.81
0.84
0.82
0.86
0.85
WE /WM T OW
0.62
0.64
0.45
0.48
0.44
0.46
WP /WM T OW
0.23
0.23
0.26
0.27
0.27
0.30
WR /WM T OW
0.02
0.01
0.01
0.01
0.01
0.01
77
20
40
60
‐20
0
20
Lateral Coordinate (m)
Longitudinal Coordinate (m)
0
H3
H2
Longitudinal Coordinate (m)
Longitudinal Coordinate (m)
H1
0
20
40
60
‐20
0
20
Lateral Coordinate (m)
0
20
40
60
‐20
0
20
Lateral Coordinate (m)
Figure 5-2: H-Series: Planform for optimal PFEI with Jet A (black) and LNG (blue)
The results show that the PFEI improves with increasing payload size. Data
from Piano-X1 for the B737-800 and B777-200LR operated at maximum range with
maximum structural payload was also used to compute reference PFEI of 7.43 and 5.94
kJ/kg-km, respectively. In all cases the H-series aircraft performance was better than
the reference aircraft. This is because compared to conventional aircraft, the all lifting
surface of the HWB planform with BLI has a higher lift-to-drag ratio, the advanced
propulsion system improves SFC, and material advancements and load alleviation
allows for reduced structural weight. Depending on the fuel choice, the H1 design
PFEI was 45% lower than the B737-800, whereas the H3 design PFEI was 52-56% lower
than the more efficient B777-200LR. Though the aerodynamic benefits of the HWB
appear scalable with comparable lift-to-drag ratios at all aircraft sizes, the propulsion
performance improved with size and structural performance was limited by geometric
constraints. At small scales, the internal volume in the outboard and aft centerbody
could not be adequately utilized due of cabin height restrictions. The unusable “white”
space resulted in a relatively high empty weight fraction, relative to both larger HWB
aircraft and to comparably sized tube and wing aircraft. At larger scales, such as the
H3 design, the cabin space could be more efficiently packaged and the empty weight
fraction decreased as a consequence. In addition, long haul missions where cargo forms
40-50% of the payload weight, obtain further benefit from typically lower secondary
1
Piano-X, Lissys Limited, United Kingdom
78
weight multipliers for cargo payload as compared to passenger payload. The PFEI
improvement in going from H2 to H3 was less than that from H1 to H2 because the
relative changes in empty weight fraction and L/D were less. This was a consequence
of the 65 m span being the same for both and in their reaching similar reductions in
white space.
Sensitivity of the results to constraint bounds was also assessed for each case
for post-optimality assessment. Table 5.2 includes the values of the approximated
Lagrange multipliers λj (see Equation 4.10) for each of the active constraints. Their
values locally estimate the decrease in the objective (PFEI) per unit relaxation of the
constraint bound.
Table 5.2: H-Series: Local Constraint Sensitivity
H1
H2
H3
Constraint
Bound
λJetA
λLNG
Bound
λJetA
λLNG
Bound
λJetA
λLNG
Span
≤52m
0.00
0.00
≤65m
0.00
0.00
≤65m
0.02
0.04
OPR
≤50
0.00
0.01
≤50
0.01
0.01
≤50
0.02
0.01
max(∆Cp )
≤1
0.00
0.00
≤1
1.21
1.37
≤1
0.06
0.03
The results show that different constraints played a different role at different scales
and for different fuels. Since the span limit for the H1 was already relaxed, it was not
a key driver for that design. The diminishing PFEI improvement from H2 to H3 could
be attributed in part to the impact of the span constraint that was identical for both
designs but only limited the larger H3 design. In most cases, OPR was maximized
to its bound limit of 50 assuming advanced cooling technologies for the N+3 time
frame. The Lagrange multiplier suggested marginal PFEI benefit for increasing the
OPR bound but it was not favored since it would also require cooling of the compressor
stages. The active maximum delta pressure coefficient constraint suggested the designs
were being driven to model fidelity limits but it also highlighted the need for a first
principles structural sizing model to expand the centerbody aerodynamic design space.
This would allow one to examine the trade-offs between aerodynamic performance and
79
the resulting structural loading and expand the feasible design space. It is to be noted
that due to the non-linear and disjointed nature of the solution space, the information
conveyed by the Lagrangian multipliers is strictly local. Hence, even though other
constraints such as the cruise angle of attack and static margin were not active for
the designs considered, they may play a dominant role in other regions of the design
space with designs of comparable performance.
5.3
Fuel Type
The PFEI objective was specifically selected to normalize aircraft productivity to
fuel energy, not fuel weight, to allow system level energetic cost comparison with
different fuels like Jet A and LNG. The lifecycle CO2 intensity (LC-CO2 I) can be
addressed by the PFEI metric when multiplied by specific lifecycle GHG emissions
(gCO2 eq/MJ) for the fuel. As discussed in Chapter 2 the lifecycle GHG emissions for
LNG from conventional sources were estimated as 73.6 gCO2 e/MJ, compared to 87.5
gCO2 e/MJ for conventional jet fuel. Using the Piano-X PFEI estimate at maximum
range with maximum structural payload, LC-CO2 I for the B737-800 and B777-200LR
were estimated at 0.65 and 0.52 g CO2e/kg-km respectively.
PFEI improves with increasing fuel LHV since proportionally lower fuel weight is
required to meet a fixed energy requirement. LHV for LNG is 50 MJ/kg-km compared
to 43.2 MJ/kg-km for conventional jet fuel. However the actual benefit of compounding
fuel weight reduction is only captured when one considers the changes in additional
on board fuel system requirements. In the case of LNG with integral tank designs, the
approximated 1% insulation/fuel weight penalty partly reduces the benefit from the
16% increased fuel specific energy. The most significant limiting factor in the case of
LNG is volume and the subsequent weight and balance challenges, since LNG has 39%
lower energy density than jet fuel. However, the fuel’s cryogenic state could improve
aerodynamic performance by promoting laminar flow on the wing bottom through
wall cooling. The cold sink could also enable alternative gas turbine cycles resulting
80
in slightly improved core power and SFC.
Table 5.3 supplements the data in Table 5.1 from SQP optimization of the MOGA
PFEI extrema. Figure 5-3 shows the different aircraft layouts for both fuels side-byside and at each scale.
Table 5.3: H-Series: Fuel Trades
H1
H2
Fuel
Jet A LNG Jet A LNG
PFEI (kJ/kg-km)
4.08
4.08
3.02
2.67
LC-CO2 I (gLCCO2 eq/kg-km) 0.36
0.30
0.26
0.20
WF (kg)
10636 9173
49876 38084
WMTOW (kg)
76687 75599 171950 16190
Static Margin (%)
10.41 16.39 10.21
9.82
LNG
Jet A
20
40
60
‐20
0
20
Lateral Coordinate (m)
0
LNG
Jet A
20
40
60
‐20
0
20
Lateral Coordinate (m)
Longitudinal Coordinate (m)
0
Jet A
2.83
0.25
58956
215760
8.26
LNG
2.62
0.19
47272
201970
10.89
H3
H2
Longitudinal Coordinate (m)
Longitudinal Coordinate (m)
H1
H3
0
LNG
Jet A
20
40
60
‐20
0
20
Lateral Coordinate (m)
Figure 5-3: H-Series: Planform for optimal PFEI with LNG and Jet A
The results in Table 5.3 show that even though fuel weight and gross take-off weight
increased with increasing payload and range, the fuel energy normalized by productivity (PFEI) decreased with scale suggesting lower fuel energy costs per payload-distance
flown. At all scales, the fuel and gross take-off weight were lower for LNG designs compared to Jet A designs. Results in Table 5.1 show the benefits on LNG over Jet A
on the disciplinary level. The BLI adjusted propulsive performance (ψSFC) showed
11-16% improvement through the use of alternative cycles. The aerodynamic performance (L/D) showed only 4-7% improvement since wall-cooling was limited to the
outer wings, which did not form a significant fraction of the aircraft wetted area con-
81
tribution to the friction drag (see Figure 5-3). The reduction in fuel weight due to
increased specific energy of LNG and the impact of payload/range scaling was observed to be 14-24%. Since at the smallest scale, the inability to adequately utilize
“white” space greatly limits the possible trades between weight and balance and aerodynamic performance and stability, the opportunity to efficiently integrate LNG was
not captured and almost no PFEI benefit was obtained. This was highlighted through
the excessive static margin for the nose-heavy H1 design with lower specific energy
LNG fuel. Though positive static margin is required for longitudinal static stablity,
the excess margin would result in limited control authority during take-off and landing configurations where pitch manuevers are essential. At the largest scale additional
volume requirements for LNG translate to increased wing volume, which is restricted
by the imposed span constraint, and only 7% lower PFEI was obtained. The H2 scale
where both restrictions were absent, the design was able to maximize benefit of LNG
to obtain nearly 12% lower PFEI. These trends are also observed through the varied
seperation of the pareto fronts for the different fuels in Figure 5-1.
Due to lower lifecycle GHG emissions from LNG, the LC-CO2 I improvements from
PFEI reduction are directly amplified. Considering both Jet A and LNG, the H1 design
LC-CO2 I was 45-54% lower than the B737-800, whereas the H3 design LC-CO2 I was
52-63% lower than the B777-200LR.
5.4
Airframe Approach Noise
As discussed in the introduction, the objectives of PFEI and airframe noise at approach
are interlinked by the coupling between the lift-to-drag ratio and wing loading through
the wing-sweep and cruise aerodynamic performance. As a reminder, the trade space
between PFEI and overall noise levels is much broader and involves the propulsion
configuration and performance. The results from the multi-objective optimization in
the trade space of PFEI and airframe noise at approach are presented in Table 5.4
with associated aircraft planforms depicted in Figure 5-4
82
Table 5.4: H-Series: PFEI and Airframe Noise
Fuel Scale Obj.
SFC
L/D
PFEI
J(x) (g/kN-s)
(kJ/kg-km)
PFEI
15.10
22.1
4.08
H1
Noise
14.94
16.2
6.38
PFEI
14.41
24.4
3.02
Jet A
H2
Noise
14.24
21.6
3.87
PFEI
13.95
24.1
2.83
H3
Noise
13.78
22.2
3.41
PFEI
13.29
23.1
4.08
H1
Noise
13.09
18.9
5.96
PFEI
12.44
26.1
2.67
LNG
H2
Noise
12.27
24.4
3.02
PFEI
12.32
25.2
2.62
H3
Noise
11.50
21.7
3.51
at Approach Trades
Λ
WApproach /S uapproach
(deg)
(kg/m2 )
(m/s)
31.65
126.3
73.29
20.24
134.3
62.11
30.51
196.5
90.91
25.83
200.7
80.58
32.30
206.3
92.43
28.31
202.3
81.68
31.40
128.5
77.80
30.10
120.8
61.53
30.24
179.9
83.63
26.91
178.5
76.36
30.73
197.9
91.29
28.07
192.2
76.73
Figure 5-4 shows that in order to reduce the approach speed, increased wing area
and a wing sweep reduction were favored in nearly all cases through an extension of
the aft mid wing area. The reduction in sweep led to an increase in the maximum
lift coefficient allowing for reduced stall and approach speeds. However, the wing area
increase resulted in increased weight, and the sweep reduction resulted in transonic
drag rise at the cruise flight regime considered. The subsequent decrease in the cruise
lift-to-drag ratio led to increased thrust requirements at cruise. The associated engine
up-sizing allowed for minor reduction of the cruise SFC but the overall system weight
increases resulted in generally higher PFEI and also approach wing-loading. The wingloading increase was dominated by the maximum lift coefficient increase for a overall
lower approach speed and airframe noise.
Evaluating only aircraft scaling effects, increased payload translated to increased
lifting area and overall system weight with greater wing loading at cruise and approach.
This was partially offset by the empty weight fraction reduction obtained at increased
sizes, which benefits PFEI but also airframe noise at approach through a reduction
in the wing-loading at approach. Also, at the largest H3 scale the span constraints
limited wing sweep reduction.
Comparing the Jet A and LNG fueled aircraft, the lower gross take-off weight of
83
40
‐20
0
20
Lateral Coordinate (m)
0
20
40
60
20
40
60
‐20
0
20
Lateral Coordinate (m)
‐20
0
20
Lateral Coordinate (m)
0
20
40
60
H2 ‐ LNG
Longitudinal Coordinate (m)
Longitudinal Coordinate (m)
H1 ‐ LNG
0
Longitudinal Coordinate (m)
20
H3 ‐ Jet A
0
20
40
60
‐20
0
20
Lateral Coordinate (m)
‐20
0
20
Lateral Coordinate (m)
H3 ‐ LNG
Longitudinal Coordinate (m)
0
60
H2 ‐ Jet A
Longitudinal Coordinate (m)
Longitudinal Coordinate (m)
H1 ‐ Jet A
0
20
40
60
‐20
0
20
Lateral Coordinate (m)
Figure 5-4: H-Series: Planform for optimal PFEI (solid line) and optimal airframe
noise at approach (dash line)
the latter allowed for reduced wing loading in nearly all cases and reduced airframe
noise at approach. The lift-to-drag ratio improvement offered through wall cooling of
the outer wings, impacted the wing loading required for optimal cruise fuel burn and
modified the trade space of cruise fuel burn and approach acoustic performance. New
design constraints were also introduced due to increased volumetric requirements of
LNG fuel and associated weight and balance considerations. At the H1 scale, the LNG
fueled aircraft that was optimized for airframe noise at approach had increased forward
and aft wing area due to fuel volume requirements, leading to a lower reduction in
wing sweep. However, combined with the marginal improvement of the wing loading at
approach, similar approach speeds could be obtained as with the Jet A fueled designs.
84
Chapter 6
Conclusion
6.1
Summary and Conclusions
The work in this thesis was completed as part of a NASA sponsored team effort to
develop advanced subsonic transport aircraft for the 2030 N+3 timeframe with improvements across the corners of the aviation performance trade space: noise, landing
and take-off (LTO) NOX emissions, fuel burn and field length. In particular, HWB
aircraft configurations with advanced technologies were studied, with a focus on the
impact of LNG fuel and payload/range scaling on fuel burn and airframe noise performance. The HWB design methodology developed during SAI was expanded along with
the addition of a multidisciplinary system design optimization framework to optimize
airframe, propulsion and operations simultaneously.
Due to its higher specific energy and lower carbon content, LNG was selected for
assessment as an aviation fuel on the basis of lifecycle GHG emissions and airframe
integration. Compared to conventional jet fuel, LNG from conventional sources was
estimated to have 16% lower lifecycle GHG emissions per unit of combustion energy.
The analysis assumed no venting of methane gas during aircraft operations so this may
be an optimistic estimate of lifecycle GHG emissions. Integral and non-integral tank
designs were also assessed based on the usage of existing wing box structure or sizing
of additional structural material, respectively. Non-integral tanks were shown to have
85
a weight that is at least 3-4% of the fuel weight being held; this analysis assumed
the use of advanced evacuated insulants such as MLI and Al-Li alloys for structural
loads at cryogenic temperatures. On a system specific energy basis, the geometric
requirements for non-integral LNG tanks would make them non-competitive, relative
to conventional jet fuel storage systems unless cargo capacity was compromised or
the fuselage was extended. Integral tanks for LNG were shown to require only about
1% insulation/fuel weight using conventional insulation such as foam. The design
was based on minimal insulation of the fuel, to allow cooling of the wing bottom for
laminar flow promotion. The minimalistic design improved aerodynamic performance
but mitigation of related de-icing and safety issues were not considered here.
Advanced technologies included for HWB design and optimization included boundary layer ingestion, distributed propulsion systems with increased component efficiencies, advanced turbine and airframe materials, structural load alleviation, thrust vectoring nozzles, variable area inlets and deployable drooped leading edge devices. The
technology infused HWB aircraft was optimized for fuel burn (PFEI) and airframe
noise at approach using both LNG and Jet A fuel for three distinct payload/range
scales: H1 (B737-800), H2 (B787-9) and H3 (B777-200LR).
In all cases the H-series aircraft fuel burn performance was better than the reference aircraft. This is because, when compared to conventional aircraft, the all lifting
surface of the HWB planform with BLI had a higher corrected lift-to-drag ratio, the
advanced propulsion systems had improved SFC, and material advancements and load
alleviation allows for reduced structural weight. Due to the cabin aisle height restrictions, the H1 designs were unable to extend the passenger cabin in the aft and outboard
sections of centerbody. This resulted in unusable “white” space and excessive empty
weight fractions. The H2 and H3 designs mitigated this drawback by carrying increased payload in larger, more efficiently packaged centerbodies using larger, more
efficient propulsion systems, leading to improvements in fuel burn. Depending on the
fuel choice, the H1 design PFEI was 45% lower than the B737-800, whereas the H3 design PFEI was 52-56% lower than the more efficient B777-200LR. However as airport
86
span constraints for the B777 class aircraft were reached, the scaling performance was
observed to asymptote with lower improvement from H2 to H3 as compared from H1
to H2.
LNG fuel use enabled several technologies including electrically distributed propulsion, laminar flow promotion on the outer wing bottom surface and alternative gas
turbine cycles. Widely distributed propulsors enabled by electrical transmission systems were not selected since the optimal boundary layer ingestion span coverage could
be obtained using lighter, beveled gear transmission systems. Compared to Jet A fueled H-series aircraft, BLI adjusted propulsive performance (λSFC) showed 11-16%
improvement through use of alternative cycles. The aerodynamic performance (L/D)
showed only 4-7% improvement since wall-cooling was limited to the outer wings
which did not form a significant fraction of the aircraft wetted area contribution to
the friction drag. The increased specific energy of LNG resulted in 14-24% fuel weight
reduction. However, the subsequent decrease in the gross take-off weight led to a
potential trade between the fuel weight and the empty weight fraction for PFEI optimization. At the H1 scale, the inability to adequately utilize “white” space along
with the increased LNG fuel volume requirements resulted in excessive static margin
with almost no PFEI benefit. At the largest H3 scale additional volume requirements
for LNG translated to increased wing volume which is restricted by the imposed span
constraint and only 7% lower PFEI was obtained. The H2 scale where both restrictions were absent, the design was able to maximize benefit of LNG to obtain nearly
12% lower PFEI.
Stall speed was used as a surrogate for the noise-based objective because sound
pressure levels of airframe noise sources at approach scale to the 5th or 6th power of
the approach velocity. In nearly all cases, decreased approach velocity was obtained
through extension of the aft mid wing area for increased maximum lift coefficient
through wing sweep reduction. The subsequent transonic drag rise resulted in higher
PFEI and wing loading at approach. Increased payload requirements from H1 to
H3 translated into increased lifting area and overall system weight with greater wing
87
loading at cruise and approach. This was partially offset by the empty weight fraction reduction obtained at increased payload sizes, which benefited PFEI but also
airframe noise at approach through a reduction in the wing-loading at approach. The
lower gross take-off weight of the LNG fueled configurations allowed for reduced wing
loading. The lift-to-drag ratio improvement offered through wall cooling of the outer
wings, impacted the wing loading required for optimal cruise fuel burn and modified
the trade space of cruise fuel burn and approach acoustic performance. New design
constraints were also introduced due to increased volumetric requirements of LNG fuel
and associated weight and balance considerations. At the H1 scale, the LNG fueled
aircraft which was optimized for airframe noise at approach, had increased forward
and aft wing area due to fuel volume requirements, and this led to a lower reduction
in wing sweep. However, combined with the marginal improvement of the wing loading at approach, similar approach speeds could be obtained as with the Jet A fueled
designs.
6.2
Recommendations for Future Work
The results show that optimal fuel burn performance of the HWB aircraft requires
efficient utilization of the unconventional internal volume and minimization of unused
“white” space. To this end, it is noted that the fixed cabins used for this assessment
did not allow exploration of the entire design space and a parametric cabin design is
recommended. This includes consideration for multi-deck cabins viable at larger design
scales or cargo configurations with less stringent geometric requirements. In addition,
the fixed centerbody aerodynamics and lack of a first principles structural sizing model
do not capture all of the interdisciplinary interactions required for centerbody design.
Hence, further development of both disciplinary models is recommended.
The performance trades showed improvements in fuel burn with increasing scale
through improvements in the empty weight fraction and SFC improvements from engine up-sizing. Such trends are also speculated to extend to ultra-large HWB (A380
88
class) aircraft. The observed asymptotic performance was partly due to imposed span
constraints which would be relaxed for such designs. These improvements were amplified by use the of LNG due to the higher fuel specific energy, SFC improvements from
alternative cycles and L/D improvements from wall cooling. Larger designs may have
relaxed fuel volume constraints and increased scale may create opportunity for additional wall cooling though laminar flow promotion at larger Reynolds numbers may
be more challenging. For ultra-large aircraft where gross take-off weight constraints
limit the design space, efficient LNG fueled aircraft may open the design space to even
larger scales not accessible to heavier jet fueled counterparts. The elimination of the
electrically distributed propulsion system resulted in underutilization of the LNG heat
sink and additional synergies with the cryogenic fuel need to be explored to exploit its
full benefit. Since, this work focused largely on the potential benefits of LNG, work
is also recommended to quantify the risks including icing, methane venting and safety
concerns.
The trade space of fuel burn and airframe noise at approach showed the noise benefit from effective wing unsweeping through extension of the aft mid wing area. This
suggests the opportunity to decouple cruise fuel burn performance and LTO airframe
noise through morphing technologies that would allow on-demand area extension for
sweep reduction. Alternatively, the sweep requirement set by transonic cruise performance could also be traded by incorporating the cruise Mach number as a design
variable. This would also require a first principles structural model to capture the
effects of wing unsweep on structural performance.
89
Bibliography
[1] Energy Information Administration. Annual Energy Outlook 2009. Technical
report, US DOE, 2009.
[2] Energy Information Administration. Natural Gas Annual 2007. Technical report,
US DOE, 2009.
[3] Not available. Natural gas: An unconventional glut. The Economist, Mar. 2010.
[4] L. Carson, G. Davis, E. Versaw, Jr. G. Cunnington, and E. Daniels. Study of
methane fuel for subsonic transport aircraft. Technical Report NASA CR-1980159320, NASA Langley Research Center, 1980.
[5] Y. Cengel. Heat and mass transfer - A practical approach. McGraw-Hill, New
York, NY, 2007.
[6] V Chandra. Fundamentals of natural gas: An international perspective. PennWell
Corp., Tulsa, OK, 2006.
[7] Q. Chen, J. Wegrzyn, and V. Prasad. Analysis of temperature and pressure
changes in liquefied natural gas (LNG) cryogenic tanks. Cryogenics, 44:701–709,
Mar. 2004.
[8] E. de la Rosa Blanco, C. Hall, and D. Crichton. Challenges in the silent aircraft
engine design. In 45th AIAA Aerospace Sciences Meeting and Exhibit, Reno, NV,
2007. AIAA-2007-0454.
[9] K. Deb. Multi-Objective Optimization using Evolutionary Algorithms. John Wiley
& Sons, 2001.
[10] R. Fletcher. Practical Methods of Optimization. John Wiley and Sons, 1987.
[11] Center for Liquefied Natural Gas. Life cycle assessment of GHG emissions from
LNG and coal fired generation scenarios: assumptions and results. Technical
report, PACE, Fairfax, VA, 2009.
[12] E. Greitzer et al. Aircraft and technology concepts for an N+3 subsonic transport. Technical report, NASA, 2010. NASA Grant/Cooperative Agreement No.
NNX08AW63A Final Report.
91
[13] R. Hendricks. Methane hydrates: More than a viable fuel feedstock option. Technical Report NASA TM-214816 / AIAA-2007-4757, NASA Glenn Research Center, 2007.
[14] J. Hileman. Alternative jet fuel feasibility. Transport Policy, 2010.
[15] J. Hileman, J. Katz, J. Mantilla, and G. Fleming. Payload fuel energy efficiency
as a metric for aviation environmental performance. In Proceedings of the 26th
International Congress of the Aeronautical Sciences, Anchorage, AK, 2008.
[16] J. Hileman, D. Ortiz, J. Bartis, H. Wong, P. Donohoo, M. Weiss, and I. Waitz.
PARTNER Project 17 Report: Near-Term Feasibility of Alternative Jet Fuels.
Technical Report PARTNER-COE-2009-001, Partnership for AiR Transportation
Noise and Emissions Reduction, 2010.
[17] J. Hileman, T. Reynolds, E. de la Rosa Blanco, T. Law, and S. Thomas. Development of approach procedures for silent aircraft. In 45th AIAA Aerospace
Sciences Meeting, Reno, NV, 2007. AIAA-2007-451.
[18] J. Hileman, Z. Spakovsky, M. Drela, and M. Sargeant. Aerodynamic and aeroacoustic three-dimensional design for a silent aircraft. In 44th AIAA Aerospace
Sciences Meeting and Exhibit, Reno, NV, 2006. AIAA-2006-241.
[19] J. Hileman, Z. Spakovsky, M. Drela, and M. Sargeant. Airframe design for ’Silent
Aircraft’. In 45th AIAA Aerospace Sciences Meeting and Exhibit, Reno, NV, 2007.
AIAA-2007-0453.
[20] J. Hileman, Z. Spakovsky, M. Drela, M. Sargeant, and A. Jones. Airframe design
for silent fuel-efficient aircraft. Journal of Aircraft, 2010.
[21] P. Jaramillo, W. Griffin, and H. Matthews. Comparative life-cycle air emissions
of coal, domestic natural gas, LNG, and SNG for electricity generation. Environmental Science and Technology, pages 6290–6296, 2007.
[22] A. Jones. Multidisciplinary optimization of aircraft design and takeoff operations
for low noise. Master’s thesis, Massachusetts Institute of Technology, Cambridge,
MA, 2006.
[23] J. Kerrebrock. Aircraft Engines and Gas Turbines. The MIT Press, Cambridge,
MA, 1992.
[24] Y. Kikkawa and I. Aoki. Gas to liquid of 21st century. In Spring Meeting of
American Institute of Chemical Engineers, Houston, TX, 1999.
[25] I Kroo and V. Manning. Collaborative optimization - Status and directions. In
8th AIAA/USAF/NASA/ISSMO Symposium on Multidisciplinary Analysis and
Optimization, Long Beach, CA, 2000. AIAA-2000-4721.
92
[26] I. Kroo and R. Shevell. Aircraft design: Synthesis and analysis. Desktop Aeronautics Inc., 2006.
[27] National Energy Technology Laboratory. Methane hydrate - future energy within
our grasp. Technical report, US DOE, 2007.
[28] R. Liebeck. Design of the blended wing body subsonic transport. Journal of
aircraft, 41(1), 2004.
[29] R. Liebeck, M. Page, and B. Rawdon. Blended-wing-body subsonic commercial
transport. In 36th AIAA Aerospace Sciences Meeting and Exhibit, Reno, NV,
1998. AIAA-1998-0438.
[30] L. Ng. Design and acoustic shielding prediction of hybrid wing-body aircraft.
Master’s thesis, Massachusetts Institute of Technology, Cambridge, MA, 2009.
[31] Office of Fossil Fuels. An interagency roadmap for methane hydrate research and
development. Technical report, US DOE, 2006.
[32] Office of Global Warming. Inventory of US greenhouse gas emissions and sinks:
1990-2007. Technical report, US EPA, 2009.
[33] D. Raymer. Aircraft design: A conceptual approach. AIAA Education Series,
New York, NY, 2006.
[34] C. Reeves and J. Rowe. Genetic Algorithms - Principles and Perspectives: A
Guide to GA Theory. Kluwer Academic, Boston, MA, 2003.
[35] E. Reshotko. Drag reduction by cooling in hydrogen-fueled aircraft. Journal of
Aircraft, 16-6(79-4112), Feb. 1979.
[36] J. Roskam. Airplane design, Part V: Component weight estimation 2nd ed.
Roskam Aviation and Engineering Corporation, Ottawa, KS, 1989.
[37] G. Rudolp. Convergence Properties of Evolutionary Algorithms. Verlag, Kovac,
Hamburg, 1997.
[38] G. Rudolph. Convergence analysis of canonical genetic algorithms. IEEE Transactions on Neural Networks, 5:96–101, 1994.
[39] J. Ruether, M. Ramezan, and E. Grol. Life cycle analysis of greenhouse gas
emissions from hydrogen fuel production in the US from LNG and coal. Technical
Report DOE/NETL-2006/1227, US DOE, 2005.
[40] Hoerner S. Fluid-Dynamic Drag. Hoerner Fluid Dynamics, 1965.
[41] M. Sargeant. Boundary layer ingestion for advanced airframes. Master’s thesis,
University of Cambridge, Cambridge, UK, 2007.
93
[42] M. Sargeant, T. Hynes, W. Graham, J. Hileman, M. Drela, and Z. Spakovszky.
Stability of hybrid-wingbody-type aircraft with centerbody leading-edge carving.
Journal of Aircraft, 2010.
[43] J. Spall. Introduction to stochastic search and optimization: Estimation, simulation, and control. Wiley, Hoboken, NJ, 2003.
[44] R. Stratton, H. Wong, and J. Hileman. PARTNER Project 28 Report: Life
Cycle Greenhouse Gas Emissions from Alternative Jet Fuels. Technical Report PARTNER-RAND-2009-001, Partnership for AiR Transportation Noise and
Emissions Reduction, 2010.
[45] I. Tamura, T. Tanaka, T. Kagajoa, S. Kuwabarab, T. Yoshiokab, T. Nagatab,
K. Kurahashic, and H. Ishitani. Life cycle CO2 analysis of LNG and city gas.
Applied Energy, pages 301–319, 2001.
[46] J. Theisen, G. Brewer, and L. Miranda. Laminar flow stabilization by surface
cooling on hydrogen fueled aircraft. In AIAA Aircraft Systems and Technology
Meeting, New York, NY, 1979. AIAA-1979-1863.
[47] M. Tong, S. Jones, and J. Haller. Engine conceptual design studies for a hybrid
wing body aircraft. Technical Report NASA TM-2009-215680, NASA, 2009.
[48] M. Tong and B. Naylor. An object-oriented computer code for aircraft engine
weight estimation. Technical Report NASA TM2009-215656, NASA, 2009.
[49] Tupolev PSC. Development of cryogenic fuel aircraft. http://www.tupolev.ru/
English/Show.asp?SectionID=82&Page=1, May 2010.
[50] S. Wakayama.
Blended-wing-body optimization problem setup.
In 8th
AIAA/USAF/NASA/ISSMO Symposium on Multidisciplinary Analysis and Optimization, Long Beach, CA, 2000. AIAA 2000-4740.
[51] S. Wakayama and I. Kroo. The challenge and promise of blended wing body optimization. In 7th AIAA/USAF/NASA/ISSMO Symposium on Multidisciplinary
Analysis and Optimization, St. Louis, MO, 1998. AIAA-1998-4736.
[52] M. Wang. The Greenhouse Gases, Regulated Emissions, and Energy Use in
Transportation (GREET) model, 2009.
[53] K. Willcox and S. Wakayama. Simultaneous optimization of a multiple-aircraft
family. Journal of Aircraft, 40(4), 2003.
94