Document 10851686
advertisement

Hindawi Publishing Corporation
Discrete Dynamics in Nature and Society
Volume 2011, Article ID 285809, 19 pages
doi:10.1155/2011/285809
Research Article
Spectral Approximation of an Oldroyd Liquid
Draining down a Porous Vertical Surface
F. Talay Akyildiz,1 Mehmet Emir Koksal,2 and Nurhan Kaplan3
1
Department of Mathematics, University of Gaziantep, 27310 Gaziantep, Turkey
Department of Elementary Mathematics Education, Mevlana University, 42003 Konya, Turkey
3
Department of Mathematics, Nigde University, 51240 Nigde, Turkey
2
Correspondence should be addressed to F. Talay Akyildiz, fakyildiz@pi.ac.ae
Received 29 June 2011; Revised 5 October 2011; Accepted 10 October 2011
Academic Editor: Carlo Piccardi
Copyright q 2011 F. Talay Akyildiz et al. This is an open access article distributed under the
Creative Commons Attribution License, which permits unrestricted use, distribution, and
reproduction in any medium, provided the original work is properly cited.
Consideration is given to the free drainage of an Oldroyd four-constant liquid from a vertical porous surface. The governing systems of quasilinear partial differential equations are solved by
the Fourier-Galerkin spectral method. It is shown that Fourier-Galerkin approximations are convergent with spectral accuracy. An efficient and accurate algorithm based on the Fourier-Galerkin
approximations for the governing system of quasilinear partial differential equations is developed
and implemented. Numerical results indicating the high accuracy and effectiveness of this algorithm are presented. The effect of the material parameters, elasticity, and porous medium constant
on the centerline velocity and drainage rate is discussed.
1. Introduction
Thin-film drainage down porous vertical surfaces is important in industry. Draining films
occur in processes as diverse as dip coating, electroplating, enameling, emptying storage
vessels, and oil recovery mechanisms 1, 2. Spectral projection and corresponding error analysis of the system of nonlinear partial differential equations arising in the free drainage startup flow of Oldroyd four constant liquids over a porous vertical surface is considered.
Literature review reveals that this problem is not considered. But for the case of impermeable wall, Goshawk and Waters 3 and Pennington and Waters 4 investigated the
drainage of an Oldroyd four-constant liquid from a vertical surface via a finite difference
method. But the problem they consider is a special case of the expended investigation in this
paper, and error analysis is not explored in their work. Again, for case of steady flow or startup phase neglected, the literature more richer, in this case, Keeley et al. 5 investigate the
drainage of thin films of non-Newtonian liquids from vertical surface, and the behavior of the
Phan Thain-Tanner models are investigated in detail 6, 7. In the present study, Galerkin’s
2
Discrete Dynamics in Nature and Society
method of the system of quasilinear partial differential equations governing the free drainage
problem is investigated for a porous vertical surface. It is shown that method converges and
that the convergence is not at all dependent on whether or not the physical parameters of the
problem assume special values. The paper is organized as follows. The problem is defined
in Section 2, and some basic results on Fourier approximations are given. A suitable FourierGalerkin approximation for the problem under consideration is proposed in Section 3 and
error analysis given following 8–11. Efficient and robust algorithms for the problem under
consideration are constructed and numerical results presented in Section 4.
2. Mathematical Formulation and Preliminary Results on
Fourier Approximation
Consider a thin liquid film draining down a flat porous vertical surface defined by Cartesian
coordinates x, y, z. The x axis points vertically downwards, the solid surface lies in the
plane y 0 with the thickness of the liquid film measured in the positive y direction, and
the z axis is positioned perpendicular to the gravitational force completing a set of righthanded axes. The nondimensionalized equations of motion and the dimensionless Oldroyd
four constant constitutive model form a quasilinear system of PDEs, where details can be
found in 3, 4, 12, 13 for the interested reader
∂Sxy ∂u
− 1 α2 u,
∂y
∂t
∂Sxy 1
∂u
∂u
∂2 u
Sxy S1
μ1 Sxx
S2
,
∂t
2
∂y
∂y
∂y∂t
Sxx S1
2.1
2.2
2
∂Sxx
∂u
∂u
− 2S1 Sxy
−2S2
,
∂t
∂y
∂y
2.3
where above we used the following dimensionless parameters as in 3
g
yY
ν2
1/3
g
xx 2
ν
,
S 1 λ1
g2
ν
1/3
g
h Hx, ty Y
ν2
,
1/3
,
S 2 λ2
μg
Sij Pij 1/3 ,
ν
g2
ν
1/3
,
μ1 μ0
g2
ν
1/3
,
U
1/3 ,
νg
u 1/3
t Ty Y
g2
ν
1/3
,
V
1/3 ,
νg
v ,
α2 1/3
νg
.
ρg
2.4
And here u uy, t, Sxy Sxy y, t, Sxx Sxx y, t are the dimensionless velocity and the
dimensionless deviatoric stress tensor; α2 , S1 , S2 , and μ1 represent the porous medium constant, dimensionless relaxation and retardation time constants, and a dimensionless material
Discrete Dynamics in Nature and Society
3
parameter, respectively. No slip at the wall y 0 and zero shear rate on the free surface of the
liquid are assumed,
u0, t 0,
∂u
0
∂y
t ≥ 0,
on y h.
2.5
The liquid is at rest at t 0, therefore initial conditions are
u y, 0 Sxy y, 0 Sxx y, 0 0.
2.6
To calculate the shape of the film profile at a given time t, the thickness h is allowed to vary
with x while assuming the flow is still locally parallel. Combining the material derivative at
the free surface
vx, h, t ∂h
∂h
ux, h, t ,
∂t
∂x
2.7
with the equation of continuity yields a differential equation in h,
∂h
−
∂x
h
0
∂u
dy u
∂h
∂h
.
∂t
2.8
Introducing the flow rate Qh, t per unit width across the film thickness h,
Qh, t h
u x, y, t dy,
2.9
0
differentiating Q with respect to h, and substituting the result into 2.8 and integrating give
xh, t − x0 h t
0
∂Q
dτ,
∂h
2.10
where x0 h xh, 0 is the initial profile and can be chosen to represent any suitable initial
shape. Equation 2.10 effectively determines the position of the free surface x as a function
of h and t.
Next some mathematical notation is introduced. Denote the inner product in L2 0, h
by
f, g h
f y g y dy.
2.11
0
If f ∈ L2 0, H, then Fourier sine series is defined as
∞
f y f
s k sin
k1
2k − 1π
y ,
2h
2.12
4
Discrete Dynamics in Nature and Society
where
2
f
s k h
π
sin
0
2k − 1πy
f y dy
2h
k 1, 2, . . . .
2.13
Similarly, Fourier cosine series is defined as
∞
f
c 0 2k − 1π
f
c k cos
f y y ,
2
2h
k1
2.14
where
2
f
c k H
H
cos
0
2k − 1πy
f y dy
2
k 1, 2, . . . .
2.15
Denote by H m the Sobolev norm, given by
2
f m
H
⎧ m ∞
2
2k − 1 2
⎪
⎪
⎪
1
f
k
,
⎪
s
2 ⎪
⎨ k1
2
m ⎪
∞
2
fc 0
⎪
2k − 1 2
⎪
⎪
⎪
1
f
k
.
c
⎩
2 2
k1
2.16
The space of periodic Sobolev functions on the interval 0, h is defined as the closure
of the space of smooth periodic functions with respect to the H m -norm and will be simply
denoted by H m . In particular, the space L2 0, h with norm denoted by L2 is recovered for
m 0. We now define subspaces of L2 0, h spanned by the set
∗
DN
∗∗
DN
√
2 sin 2k − 1 πy/2h
, 1≤k≤N ,
√
h
√
2 cos 2k − 1 πy/2h
, 1≤k≤N .
√
h
2.17
∗
∗
The operators PN and PN
denote the orthogonal, self-adjoint projection of L2 onto DN
and
∗∗
DN defined, respectively, by
N
2k − 1πy PN f y fs k,
sin
2h
k1
N
f
c 0 2k − 1πy ∗
fc k.
PN
f y cos
2
2h
k1
2.18
Discrete Dynamics in Nature and Society
5
For f ∈ H m , the estimates:
f − PN f 2 ≤ Cp N −m ∂m
y f 2,
L
L
2.19
m f − PN f n ≤ Cp N n−m f
∂
y 2,
H
L
hold for an appropriate constant Cp and a positive integer n. The reader is referred to 8 for
the proof of these inequalities.
The space of continuous functions from the interval 0, T into the space H n is denoted
∗
, where the topology on
by C0, T , H n . Similarly, we also consider the space C0, T , DN
∗
can be given by any norm. Finally, note the inverse inequathe finite-dimensional space DN
lity
m ∂y ϕ
L2
≤ N m ϕL2 ,
2.20
∗
which holds for integers m > 0 and ϕ ∈ DN
. A proof of this estimate can also be found in
11. We will make use of the Sobolev lemma, which guarantees the existence of a constant c
such that
supf y ≤ cf H 1 .
2.21
y
∗
We now note that exactly the same estimates hold for PN
. In the following, it will
always be assumed that a solution of our problem 2.11–2.15 exists on some time interval 0, T with a certain amount of spatial regularity. In particular, we suppose that a solution
3
exists in the C0, T , H 1 space for some T > 0. With these preliminaries in place, we are
now set to tackle the problem of defining a suitable spectral projection of 2.11–2.15 and
proving the convergence of such a projection. First, the Fourier-Galerkin method is presented
and a proof of convergence given.
3. The Fourier-Galerkin Method
√
√
√
{ek y, k
N}
−
√ { 2 sin2k − 1πy/2h/ h, k ∈ N} and {fk y, k
N} { 2 cos2k
1πy/2h/ h, k ∈ N} are chosen to be an orthonormal basis of the Hilbert space L20 0, h
∗
and L2 0, h, respectively. Then, the subspace of these Hilbert spaces spanned by the DN
√
√
√
√
∗∗
{ 2 sin2k − 1 πy/2h/ h, 1 ≤ k ≤ N} and DN
{ 2 cos2k − 1πy/2h/ h, 0 ≤
k ≤ N}, respectively. Fourier-Galerkin approximation of 2.1–2.5 are find the functions
∗
∗∗
N
, SN
uN t ∈ DN
xy t, and Sxx ∈ DN for all 0 ≤ t ≤ T , such that
2
∂t uN − 1 − ∂Y SN
xy , ω1 β u, ω1 0,
t ∈ 0, T ,
1
N
N
N
N
N
2 N
Sxy S1 ∂t Sxy μ1 Sxx ∂y u − ∂y u − S2 ∂ty u , ω2 0,
2
3.1
t ∈ 0, T ,
3.2
6
Discrete Dynamics in Nature and Society
2
N
N
N
N
∂
S
∂
S
−
2S
S
∂
u
−
2S
u
,
ω
0, t ∈ 0, T ,
3.3
SN
1
t
1
y
2
y
2
xy
xx
xx
uN 0 0,
SN
xy 0 0,
SN
xx 0 0,
3.4
∗
∗∗
N
for all ω1 ∈ DN
and for all ω2 ∈ DN
. Since for each t, uN ·, t, SN
xy ·, t, and Sxy ·, t have the
form
√
N
2 sin 2k − 1 πy/2h
N
u
k, t
u y, t ,
√
h
k1
√
2 cos 2k − 1πy/2h
N
N
s
t
,
k,
√
xy
SN
xy y, t h
N
k1
√
2 cos 2k − 1πy/2h
N
N
s
xx k, t
√
.
y, t h
N
Sxx
3.5
k1
Taking ω1 2/H sin2k − 1 πy/2h, ω2 2/H cos2k − 1πy/2h, 1 ≤ k ≤
N in 3.1–3.3 yields the following system of equations for the Fourier coefficients of uN ,
N
SN
xy , and Sxx :
d N
2k − 1π N
u
k, t −
s
xy k, t dt
2h
s
N
xy k, t S1
2h
2
,
h π2k − 1
d N
2k − 1π d N
2k − 1π N
s
k, t u
k, t S2
u
k, t
dt xy
2h
2h
dt
N
2k − 1π 2 μ1
cijN s
N
uN k, t,
xx i, t
4h
h i,j1
d N
2k − 1π N
s
xx k, t −
u
k, t
dt
2h
N
2k − 1π 2 − 2S1
cijN s
N
uN k, t
xy i, t
4h
h i,j1
N
2k − 1π 2 2 −2S2
dijN u
N i, t
uN j, t ,
4h
h i,j1
3.6
3.7
s
N
xx k, t S1
3.8
u
N k, t 0,
s
N
s
N
3.9
xy k, t 0,
xx k, t 0,
h
2j − 1 πy
2N − 1πy
2i − 1πy
sin
cos
dy,
cijN cos
2h
2h
2h
0
h
2j − 1 πy
2N − 1πy
2i − 1πy
sin
cos
dy.
dijN sin
2h
2h
2h
0
3.10
Discrete Dynamics in Nature and Society
7
This is a nonlinear system of ordinary differential equations for the functions
N
{
u k, t, s
N
N
xy k, t, s
xx k, t}k1 ; by standard existence theory, there is a unique solution which
exists on some time interval 0, TN , where TN possibly may be equal to T . Since the
argument is standard, the proof is omitted here. The main result of this paper is the fact
N
that the Galerkin approximation {uN , SN
xy , Sxx } converges to the exact solution {u, Sxy , Sxx }
when u is smooth enough. This is stated in the next theorem.
N
Theorem 3.1. Suppose that a solution {u, Sxy , Sxx } of 2.1–2.5 exists in the space
C0, T , H m 3 for m ≥ 1 and for some time T > 0. If PN uh, t − uN u, t ≤ cN 1−m and
1−m
∗
N
Sxy − SN
, then, for large enough N, there exists a unique solution {uN , SN
PN
xy ≤ cN
xy , Sxx } of
the finite dimensional problem 3.1–3.4. Moreover, there exist constants Γ1 , Γ2 , and Γ3 such that
sup u − uN L2
t∈0,T ≤ Γ1 N 1−m ,
sup Sxy − SN
xy sup Sxx − SN
xx t∈0,T L2
t∈0,T L2
≤ Γ2 N 1−m ,
3.11
≤ Γ3 N 1−m .
Before the proof is given, note that the assumptions of the theorem encompass the existence of constants κ, κ1 , and κ2 such that
sup u y, t H m ≤ κ,
sup Sxx y, t H m ≤ κ1 ,
t∈0,T t∈0,T sup Sxy y, t H m ≤ κ2 .
t∈0,T 3.12
In particular, it follows that there are other constants ψ, ψ1 , and ψ2 such that
sup u y, t H m ≤ ψ,
t∈0,T sup Sxx y, t H m ≤ ψ1 ,
t∈0,T sup Sxy y, t H m ≤ ψ2 .
t∈0,T 3.13
The main ingredient in the proof of the theorem is a local error estimate which will be established by the following lemma.
N
Lemma 3.2. Suppose that the solution {uN , SN
xy , Sxx } of 3.1–3.4 exists on the time interval
0, t∗N and that supt∈0,t∗ uN y, tH 2 ≤ 2ψ, supt∈0,t∗ SN
xy y, tH 2 ≤ 2ψ1 , supt∈0,t∗ N
N
N
∗
N
1−m
SN
, and supt∈0,t∗ |PN
Sxy h, t −
xx y, tH 2 ≤ 2ψ2 , supt∈0,t∗ |PN uh, t − u h, t| ≤ βN
N
1−m
, then the error estimate:
SN
xy h, t| ≤ β1 N
N
1−m
sup u − uN 2 ≤ Γ1 N 1−m ,
sup Sxy − SN
,
xy 2 ≤ Γ2 N
L
L
∗
∗
t∈0,tN t∈0,tN 1−m
,
sup Sxx − SN
xx 2 ≤ Γ3 N
L
∗
t∈0,tN 3.14
holds for constant Γ1 which is the function of T, α2 , Cp , κ, β, and c, constant Γ2 which is
the function of T, S1 , S2 , κ1 , ψ, ψ1 , ψ2 , c1 , β1 , and c, and constant Γ3 which is the function of
T, S1 , κ1 , ψ, ψ1 , c1 , κ, and c.
8
Discrete Dynamics in Nature and Society
∗
∗
N
Sxy −SN
Proof. Let σ 1 PN u−uN , σ2 PN
xy , σ3 PN Sxx − Sxx . Also, from the definition of PN
∗
∗
and PN
, we have ∂y σ 1 PN
∂y u − ∂y uN , ∂y σ 2 PN ∂y Sxy − ∂y SN
, ∂y σ 3 PN ∂y Sxx − ∂y SN
.
xy
xx
∗
∗
∗
commute
We apply P N , P N and PN to both sides of 2.1–2.3, respectively. Since PN , PN
with derivation, we obtain
∂t PN uα2 u 1 ∂y PN Sxy ,
1
∗
∗
∗
∗
PN
Sxy S1 ∂t PN
Sxy μ1 PN
∂y u S2 ∂t P ∗N ∂y u,
Sxx ∂y u PN
2
2
∗
∗
∗
∗
Sxy ∂y u −2S2 PN
PN
Sxx S1 ∂t PN
Sxx − 2S1 PN
∂y u .
3.15
∗
∗∗
∗∗
We multiply these equations with test functions σ1 ∈ DN
, σ2 ∈ DN
, and σ3 ∈ DN
, respectively, integrate over 0, h, and subtract the resulting expressions from 3.1, 3.2, and
3.3 to get
1 d
σ1 2L2 α2 σ1 2L2 PN 1 − 1N , σ1 PN ∂y Sxy − SN
xy , σ1 ,
2 dt
1 d
1 ∗
N
Sxx ∂y u − SN
σ2 2L2 μ1 PN
xx ∂y u , σ2
2 dt
2
∗
∗ 2
∂y u − uN , σ2 S2 PN
∂ty u − uN , σ2 ,
PN
σ2 2L2 S1
1 d
1 ∗
N
∂
u
,
σ
Sxx ∂y u − SN
σ2 2L2 μ1 PN
y
2
xx
2 dt
2
∗
∂y u − uN , σ2 S2 ∂t P ∗N ∂y u − uN , σ2 ,
PN
σ2 2L2 S1
3.16
1 d
∗
N
Sxy ∂y u − SN
σ3 2L2 − 2S1 PN
xy ∂y u , σ3
2 dt
2 2 ∗
N
−2S2 PN ∂y u − ∂y u
, σ3 .
σ3 2L2 S1
∗
∗∗
Since σ1 ∈ DN
, σ2 , σ3 ∈ DN
,
1 d
σ1 2L2 α2 σ1 2L2 ∂y σ2 , σ1 ≤ ∂y σ2 L2 σ1 L2 ,
2 dt
3.17
1 d
σ1 2L2 α2 σ1 2L2 ≤ ∂y σ2 L2 ≤ |σ2 H, t|.
2 dt
3.18
then we have
Discrete Dynamics in Nature and Society
9
Consequently, from hypothesis and Gronwall’s inequality, we obtain
sup σ1 L2 ≤ Γ1 N 1−m
,
t∈0,t∗N 3.19
where Γ1 is a function of T, β, α2 , and c:
σ2 2L2 S1
1 d
1 N
2
∂
S
∂
.
∂
u
,
σ
σ
,
σ
σ
,
σ
σ2 2L2 μ1 Sxx ∂y u − SN
y
2
y
2
2
1
2
xx
ty
1
2 dt
2
3.20
Hence, we get
1 d
1 N
σ2 2L2 μ1 Sxx ∂y u − SN
xx ∂y u , σ2
2 dt
2
≤ ∂y σ1 L2 σ2 L2 S2 ∂2ty σ1 2 σ2 L2 ,
σ2 2L2 S1
3.21
L
1 d
N
σ3 2L2 − 2S1 Sxy ∂y u − SN
xy ∂y u , σ3
2 dt
2 2 −2S2 ∂y u − ∂y uN , σ3 .
σ3 2L2 S1
3.22
Let us estimate third term on the left-hand side of 3.20 in the time interval 0, TN :
N
Sxx − SN
∂y u uN
Sxx ∂y u − SN
xx ∂y u , σ2 xx
SN
xx
∂y u − u
N
∂y u
N
Sxx −
SN
xx
, σ2
3.23
.
Thus,
N
N Sxx ∂y u − SN
Sxx − SN
xx ∂y u , σ2 ≤ sup∂y u u
xx 2 σ2 L2
L
y
N N N
u
−
u
supSN
sup
u
−
S
σ
∂
S
∂
2
y
2
y
xx
xx
xx 2 σ2 L2
L
2
L
y
≤ cu uN H2
cSN
xx H1
cuN H2
L
y
Sxx − PN Sxx L2 PN Sxx − SN
xx 2 σ2 L2
L
u − PN uH 1 PN u − uN H1
σ2 L2 ≤ 5cψ
× Cp N −m Sxx H m σ2 L2 σ2 L2 2c 1 Cp N 1−m uH m σ2 L2 σ2 L2 .
3.24
10
Discrete Dynamics in Nature and Society
Hence,
d
σ2 L2 ≤ ψ2 σ2 L2 5cψκN −m 2cκ1 ψ1 Cp N 1−m ∂y σ 1 2
L
dt
≤ ψ2 − 1 σ2 L2 5cψCp κN −m 2cκ1 ψ1 Cp N 1−m ∂y σ 1 2
σ2 2L2 S1
L
≤ c1 σ2 L2 cN 1−m ∂y σ 1 L2
3.25
S2 ∂2ty σ 2 .
1
L
Using the hypothesis and Gronwall’s inequality,
sup σ2 L2 ≤ Γ2 N 1−m ,
t∈0,t∗N 3.26
Γ1 is a function of T, S1 , S2 , κ1 , ψ, ψ1 , ψ2 , c1 , β1 , and c. Estimating the RHS of 3.22 in the
time interval 0, TN ,
2
∂y u
2 − ∂y uN , σ3 ∂y u uN u − uN , σ3
∂y u uN u − uN , σ3 u uN ∂y u − uN , σ3
3.27
∂y u uN u − uN , σ3 u uN ∂y u − PN u, σ3
u uN ∂y PN u − uN , σ3 ,
2
∂y u 2 − ∂y uN , σ3 ≤ sup∂y u uN u − uN 2 σ3 L2
L
y
sup ∂y u uN ∂y u − PN uL2 σ3 L2
y
H
N
u u ∂y σ3 σ3 dy
0
≤ cu uN 2 u − PN uL2 PN u − uN 2 σ3 L2
H
L
H 1
cu uN 1 u − PN uH 1 σ3 L2 σ32 ∂y u uN dy
H
2 0
≤ 3cψ Cp N −m uH m σ3 L2 σ3 L2
H
1
3cψCp N 1−m uH m σ3 L2 sup∂y u uN σ32 dy.
2 y
0
3.28
Noting that the last integral is bounded by 1/23cψ, the estimate is
2 ∂y u 2 − ∂y uN , σ3 ≤ 3cψσ3 2 3 σ3 2 Cp u m N −m N 1−m .
L
L
H
2
3.29
Discrete Dynamics in Nature and Society
11
N
N
N
Sxy ∂y u − SN
xy ∂y u , σ3 can be estimated in exactly the same way as Sxx ∂y u − Sxx ∂y u , σ2 .
Then, 3.22 as a whole is estimated as
σ3 L2 S1
d
σ3 L2 ≤ ψ2 σ3 L2 5cψCp κN −m 2cκ1 ψ1 Cp N 1−m
dt
3
3cψ
σ3 L2 Cp κ N −m N 1−m .
2
3.30
Therefore, we get
c1 σ3 L2 S1
d
σ3 L2 ≤ cN 1−m .
dt
3.31
Then, using the Gronwall’s inequality,
sup σ3 L2 ≤ Γ3 N 1−m ,
t∈0,t∗N 3.32
where Γ3 is a function of T, S1 , κ1 , ψ, ψ1 , c1 , and c. Since
u − uN L2
u PN u − PN u − uN L2
≤ u − PN uL2
Sxy − SN
xy L2
Sxx − SN
xx L2
3.33
PN u − uN 2 ,
L
∗
∗
Sxy PN
Sxy − PN
Sxy − SN
xy L2
∗
∗
≤ Sxy − PN
Sxy L2 PN
Sxy − SN
xy 2 ,
∗
∗
Sxx PN
Sxx − PN
Sxx − SN
xx 3.34
L
L2
∗
∗
≤ Sxx − PN
Sxx L2 PN
Sxx − SN
xx 2 .
3.35
L
Using 2.18 and 3.19 in 3.33, 2.18 and 3.26 in 3.34, 2.18 and 3.32 in 3.35, respectively, we obtain
1−m
sup u − uN 2 ≤ Γ1 N 1−m ,
sup Sxy − SN
,
xy 2 ≤ Γ2 N
L
L
∗
∗
t∈0,tN t∈0,tN 1−m
,
sup Sxx − SN
xx 2 ≤ Γ3 N
L
∗
t∈0,tN 3.36
where Γ1 , Γ2 , and Γ3 are constants, functions of T, α2 , Cp , κ, β, and c, T, S1 , S2 , κ1 ,
ψ, ψ1 , ψ2 , c1 , β1 , and c, and of T, S1 , κ1 , ψ, ψ1 , c1 , κ, and c, respectively.
12
Discrete Dynamics in Nature and Society
0.5
α=0
0.4
u(0.5, t)
α=1
0.3
0.2
0.1
0
0
1
2
3
4
5
t
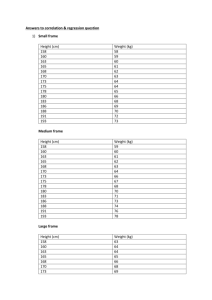
Figure 1: Comparison of exact analytical and numerical solutions of centerline velocity field for μ1 0,
S1 2, S2 1, and h 1 for both permeable wall α 1 and impermeable wall.
μ1 = 50
0.7
μ1 = 10
0.6
0.5
u(0.5, t)
μ1 = 1
0.4
μ1 = 0
0.3
0.2
0.1
0
0
2
4
6
8
10
t
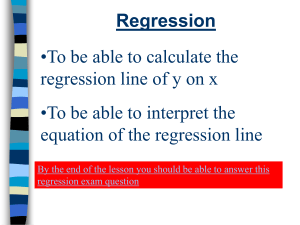
Figure 2: The effect of the nonlinear parameter μ1 on the centerline velocity profile for S1 2, S2 1, α 0,
and h 1.
N
Lemma 3.3. Suppose that the solution {uN , SN
xy , Sxx } of 3.1–3.3 exists on the time interval
0, t∗N and that supt∈0,t∗ uN y, tH 2 ≤ 2ψ, supt∈0,t∗ SN
xy y, tH 2 ≤ 2ψ1 , supt∈0,t∗ N
N
N
∗
N
1−m
SN
, and supt∈0,t∗ |PN
Sxy h, t −
xx y, tH 2 ≤ 2ψ2 , supt∈0,t∗ |PN uh, t − u h, t| ≤ βN
N
1−m
, then the error estimate:
SN
xy h, t| ≤ β1 N
N
3−m
sup u − uN 2 ≤ Γ1 N 3−m ,
sup Sxy − SN
,
xy 2 ≤ Γ2 N
H
H
t∈0,t∗N t∈0,t∗N 3−m
,
sup Sxx − SN
xx 2 ≤ Γ3 N
H
∗
t∈0,tN 3.37
Discrete Dynamics in Nature and Society
13
0.7
α=0
0.6
0.5
u(0.5, t)
α=1
0.4
0.3
α=2
0.2
α=5
0.1
0
0
2
4
6
8
10
t
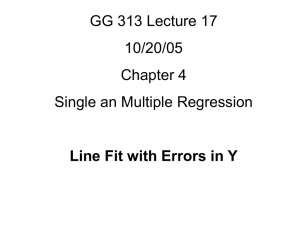
Figure 3: The effect of the porous medium parameter α2 on the centerline velocity profile for S1 2, S2 1,
μ1 10, and h 1.
holds for the constants Γ1 , Γ2 , and Γ3 . The proof of the Lemma follows from 3.19, 3.26, and 3.32
after application of the triangle inequality and the inverse inequality 2.19.
Proof of Theorem 3.1. To extend the estimate of the first inequality in 3.14 to the time interval 0, T t∗N unspecified in Lemma 3.2 is defined as
t∗N sup t ∈ 0, T | for all t ≤ t, uN y, t H2
≤ 2ψ .
3.38
Thus, the time t∗N corresponds to the largest time in 0, T for which the H 2 -norm of uN is
uniformly bounded by 2ψ. Since uN y, 0H 2 PN y, 0H 2 ,
N
u y, 0 H2
≤ u y, 0 H 2 ≤ ψ,
3.39
therefore t∗N > 0 for all N. Note that t∗N is smaller than the maximum time of existence of the
solution TN . Now, we need to show that there exists N L such that
t∗N T
∀N ≥ N L ,
3.40
and therefore the supremum in 3.14 holds on 0, T . From the definition 3.38, we either
have t∗N T or t∗N < T in which case uN y, t H 2 2ψ. Now assume that t∗N < T , then
2ψ uN y, t∗N H2
≤ uN y, t∗N − u y, t uN y, t∗N − u y, t H2
H2
ψ.
u y, t H 2
3.41
14
Discrete Dynamics in Nature and Society
s1 /s2 = 6
0.6
s1 /s2 = 4
0.5
s1 /s2 = 2
u(0.5, t)
0.4
0.3
0.2
0.1
0
0
2
4
6
8
10
12
16
14
18
20
t
Figure 4: The effect of the elasticity on the centerline velocity profile for μ1 10 and h 1 for permeable
wall α 1.
Hence, we obtain
ψ ≤ uN y, t∗N − u y, t H2
.
3.42
On the other hand, Lemma 3.3 implies
3.43
ψ ≤ Γ1 N 3−m
or
N≤
Γ1
ψ
1/m−3
3.44
.
In conclusion, for N L > Γ1 /ψ1/m−3 , we cannot have t∗N < T and claim 3.40 holds. It follows
that N ≥ N L the solution uN of 3.1 is defined on 0, T , since as noted before t∗N < TN , and,
from 3.14,
sup u y, t − uN y, t t∈0,T L2
≤ Γ1 N 1−m .
3.45
Discrete Dynamics in Nature and Society
15
s1 /s2 = 6
2
s1 /s2 = 4
u(0.5, t)
1.5
1
s1 /s2 = 2
0.5
0
0
2
4
6
8
10
12
14
16
18
20
t
Figure 5: The effect of the elasticity on the centerline velocity profile for μ1 10 and h 1 for impermeable
wall.
In exactly the same way, we can extend the estimate of the second and third inequalities in 3.14 to the time interval 0, T and show that
sup Sxy y, t − SN
xy y, t t∈0,T sup Sxx y, t − SN
xx y, t t∈0,T L2
≤ Γ2 N 1−m ,
3.46
L2
≤ Γ3 N 1−m .
4. Numerical Results and Discussion
The system of differential equations 3.6–3.9 is of the following form
d N
,
u
k, t G1 s
N
t
k,
xy
dt
d N
s
xy k, t G2 s
N
N
N k, t, S1 , S2 ,
xx i, t, s
xy k, t, u
dt
d N
N
N
,
s
xx k, t G3 s
N
,
S
t,
s
t,
u
t,
S
i,
k,
k,
1
2
xx
xy
dt
u
N k, t 0,
s
N
xy k, t 0,
4.1
s
N
xx k, t 0.
Runge-Kutta method is applied to this system. The integrals in equations 2.8 and 2.9 are
calculated analytically and numerically, respectively, with ∂Q/∂h approximated by a central
difference formula. To illustrate the spectral accuracy, the time step is chosen to be sufficiently
16
Discrete Dynamics in Nature and Society
h
0
0.1
0.2
0.3
0.5
0.4
0.6
0.7
0.8
0.9
0
1
x(h, t) − x0 (h)
2
3
4
5
6
7
μ1 = 10
μ1 = 50
μ1 = 0
μ1 = 1
Figure 6: The effect of the material parameter μ1 on the drainage rate for S1 2, S2 1 for impermeable
wall.
Table 1
N number of modes
10
15
20
log10 error impermeable wall
log10 error permeable wall α 1
−5.1
−6.45
−7.12
−5.3
−6.55
−7.14
small so that the error is dominated by the spatial discretization. The free drainage of the
Oldroyd-B liquid μ1 0 for which an exact analytical solution is possible is considered first
14. Figure 1 compares the exact analytical solution in 14 with the approximate solution
with N 5 nodes only for both permeable and impermeable wall. The exact and approximate
solutions are indistinguishable in the figure. The error log10 uN − uL∞ 0,h at t 1 of
the Fourier-Galerkin approximations with increasing number of nodes for the drainage of
Oldroyd-B liquid is listed in Table 1.
This shows that numerical results are at least accurate up to the seventh decimal for
N 20. The aim of this paper is to elaborate the effects of the nonlinear parameter μ1 and
porous medium parameter α2 on the centerline velocity and drainage rate. The effect of these
Discrete Dynamics in Nature and Society
17
h
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
0
1
x(h, t) − x0 (h)
2
3
4
5
6
7
α=0
α=1
α=2
Figure 7: The effect of porous medium parameter α2 on the drainage rate for S1 2, S2 1, and μ1 10.
parameters on the velocity field is shown in Figures 2 and 3. Figure 2 displays the effect of the
nonlinear parameter μ1 on the centerline velocity when the wall is impermeable α 0, and
S1 2, S2 1, and h 1. Clearly, the overshoot gradually disappears as numerical values of
the nonlinear parameter μ1 increase. In addition, the steady centerline velocity increases with
increasing values of μ1 . Figure 3 explores the effect of porosity on the centerline velocity for
μ1 10. Increasing the porosity parameter triggers a decrease in the value of the centerline
velocity. The difference between the relaxation and retardation times, S1 − S2 , is a measure of
the elasticity of the Oldroyd four-constant liquid, the greater the difference is the more elastic
the liquid is. The effect of elasticity on the centerline velocity of constant viscosity Oldroyd
four-constant liquids is shown in Figures 4 and 5 for permeable and impermeable walls,
respectively. In either case, the centerline velocity increases with an increase in elasticity. The
effect of the nonlinear parameter μ1 and porous medium parameter α2 on the drainage rate is
examined in Figures 6 and 7, respectively. Since in all cases the nonlinear parameter μ1 has an
increasing effect on the velocity, we expect increasing μ1 will lead to a thinner film over either
type of wall, impermeable or permeable. That is evident in Figure 6, which shows that liquid
drain more rapidly as μ1 is increased from zero. Since the porous medium parameter α2 has
a decreasing effect on the velocity in all cases both permeable and impermeable wall, we
expect increasing α2 will lead to a thicker film over either impermeable or permeable wall,
18
Discrete Dynamics in Nature and Society
h
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
0
0.5
1
x(h, t) − x0 (h)
1.5
2
2.5
3
3.5
4
s1 /s2 = 1
s1 /s2 = 2
s1 /s2 = 4
Figure 8: The effect of elasticity on the drainage rate for α 1 and μ1 1.
Figure 7. The effect of the elasticity on the drainage rate is shown in Figure 8 for three liquids
of which liquid 1 is the most elastic and liquid 3 is the least elastic. Liquid 1 drains more
rapidly than liquid 2, which in turn drains more rapidly than liquid 3.
References
1 J. Q. Xu, “Modeling unsteady-state gravity-driven flow in porous media,” Journal of Petroleum Science
and Engineering, vol. 62, no. 3-4, pp. 80–86, 2008.
2 J. A. Goshawk, N. D. Waters, G. K. Rennie, and E. J. Staples, “Enhancement of the drainage of nonNewtonian liquid films by oscillation,” Journal of Non-Newtonian Fluid Mechanics, vol. 51, no. 1, pp.
21–60, 1994.
3 J. A. Goshawk and N. D. Waters, “The effect of oscillation on the drainage of an elastico-viscous
liquid,” Journal of Non-Newtonian Fluid Mechanics, vol. 54, pp. 449–464, 1994.
4 S. V. Pennington, N. D. Waters, and E. W. Williams, “The numerical simulation of an oldroyd liquid
draining down a vertical surface,” Journal of Non-Newtonian Fluid Mechanics, vol. 34, no. 2, pp. 221–239,
1990.
5 A. M. Keeley, G. K. Rennie, and N. D. Waters, “Draining thin films-part 1,” Journal of Non-Newtonian
Fluid Mechanics, vol. 28, no. 2, pp. 213–226, 1988.
6 Y. Dimakopoulos and J. Tsamopoulos, “On the gas-penetration in straight tubes completely filled with
a viscoelastic fluid,” Journal of Non-Newtonian Fluid Mechanics, vol. 117, no. 2-3, pp. 117–139, 2004.
Discrete Dynamics in Nature and Society
19
7 M. Pavlidis, Y. Dimakopoulos, and J. Tsamopoulos, “Fully developed flow of a viscoelastic film down
a vertical cylindrical or planar wall,” Rheologica Acta, vol. 48, no. 9, pp. 1031–1048, 2009.
8 Y. Maday and A. Quarteroni, “Error analysis for spectral approximation of the Korteweg-de Vries
equation,” RAIRO Modélisation Mathématique et Analyse Numérique, vol. 22, no. 3, pp. 499–529, 1988.
9 H. Kalisch and X. Raynaud, “Convergence of a spectral projection of the Camassa-Holm equation,”
Numerical Methods for Partial Differential Equations, vol. 22, no. 5, pp. 1197–1215, 2006.
10 A. Quarteroni and A. Valli, Numerical Approximation of Partial Differential Equations, Springer, Berlin,
Germany, 1997.
11 C. Canuto, M. Y. Hussaini, A. Quarteroni, and T. A. Zang, Spectral Methods in Fluid Dynamics, Springer,
New York, NY, USA, 1988.
12 F. T. Akyildiz, K. Vajravelu, and H. Ozekes, “Fourier-Galerkin domain truncation method for Stokes’
first problem with Oldroyd four-constant liquid,” Computers and Mathematics with Applications, vol.
55, no. 11, pp. 2452–2457, 2008.
13 N. D. Waters and A. M. Keeley, “Start-up of an elastico-viscous liquid draining from a vertical surface,” Journal of Non-Newtonian Fluid Mechanics, vol. 22, no. 3, pp. 325–334, 1987.
14 F. T. Akyildiz and D. A. Siginer, “Start-up of an elastico-viscous liquid draining from a porous vertical
surface,” Journal of Non-Newtonian Fluid Mechanics. In press.
Advances in
Operations Research
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Advances in
Decision Sciences
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Mathematical Problems
in Engineering
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Journal of
Algebra
Hindawi Publishing Corporation
http://www.hindawi.com
Probability and Statistics
Volume 2014
The Scientific
World Journal
Hindawi Publishing Corporation
http://www.hindawi.com
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
International Journal of
Differential Equations
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Volume 2014
Submit your manuscripts at
http://www.hindawi.com
International Journal of
Advances in
Combinatorics
Hindawi Publishing Corporation
http://www.hindawi.com
Mathematical Physics
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Journal of
Complex Analysis
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
International
Journal of
Mathematics and
Mathematical
Sciences
Journal of
Hindawi Publishing Corporation
http://www.hindawi.com
Stochastic Analysis
Abstract and
Applied Analysis
Hindawi Publishing Corporation
http://www.hindawi.com
Hindawi Publishing Corporation
http://www.hindawi.com
International Journal of
Mathematics
Volume 2014
Volume 2014
Discrete Dynamics in
Nature and Society
Volume 2014
Volume 2014
Journal of
Journal of
Discrete Mathematics
Journal of
Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com
Applied Mathematics
Journal of
Function Spaces
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Optimization
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014