Document 10851096

Hindawi Publishing Corporation
Discrete Dynamics in Nature and Society
Volume 2012, Article ID 350360, 16 pages doi:10.1155/2012/350360
Research Article
Handling Stability of Tractor Semitrailer
Based on Handling Diagram
Ren Yuan-yuan,
1, 2
Zheng Xue-lian,
2
and Li Xian-sheng
2
1 College of Computer Science and Technology, Jilin University, No. 2699 Qianjin Street,
2
Changchun 130012, China
Tra ffi c College, Jilin University, No. 5988 Renmin Street, Changchun 130022, China
Correspondence should be addressed to Li Xian-sheng, lixiansheng123@yahoo.com.cn
Received 9 May 2012; Revised 9 July 2012; Accepted 18 July 2012
Academic Editor: Wuhong Wang
Copyright q 2012 Ren Yuan-yuan et al. This is an open access article distributed under the
Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
Handling instability is a serious threat to driving safety. In order to analyze the handling stability of a tractor semitrailer, a handling diagram can be used. In our research, considering the impact of multiple nonsteering rear axles and nonlinear characteristics of tires on vehicle handling stability, the handling equations are developed for description of stability of tractor semi-trailer. Then we obtain handling diagrams so as to study the influence of driving speed, loaded mass, and fifth wheel lead on vehicle handling stability. The analysis results show that the handling stability of a tractor semi-trailer when the tractor has two nonsteering rear axles is better than that when the tractor has only one nonsteering rear axle. While the stability in the former case is slightly influenced by driving speed and loaded mass, the latter is strongly influenced by both. The fifth wheel lead is found to only slightly influence handling stability for both tractor semi-trailers.
Therefore, to ensure the driving safety of tractor semi-trailers when the tractor has only one nonsteering rear axle, much stricter restraints should be imposed on driving speed, and the loaded mass must not exceed the rated load of the trailer.
1. Introduction
Tractor semitrailers make up a large proportion of road transport vehicles due to their high transportation e ffi ciency and economy. In 2010, the number of lorries in China reached 17 million, of which 8.7% were tractor semitrailers, and the number is growing at a rate of 20% per year.
At the same time, the number of tra ffi c accidents involving tractor semitrailers remains high, and these accidents often cause serious personal injuries and property damage. Chinese statistics show that more than 1 in 3 tractors caused an accident on the highway in 2010, leaving 10,881 people dead.
2 Discrete Dynamics in Nature and Society
Steering instability is one of the main contributors to tra ffi c accidents involving tractor semitrailers. But, until now, little attention has been paid to it, and there are relatively few works on the topic 1 – 3 . This makes such a study essential.
Two di ff erent approaches are generally used to analyze vehicle handling stability: open and closed loop measurements. Unlike the former, the latter does not reflect the vehicle’s inherent stability because driver behavior is taken into consideration 4 – 6 . As a result, most scholars prefer to use open loop analysis.
There are many methods of analyzing the open loop handling stability of vehicles, including among others dynamic theory 4 – 10 and graphical representations 11 – 13 . One of the most useful methods is the handling diagram invented by Pacejka 14 – 16 , which has been used extensively due to its intuitive approach and convenience 11 , 12 , 17 – 22 . In 11 , 12 ,
17 , 18 , handling diagrams were used to describe a general vehicle’s handling stability based on linear or nonlinear models of vehicle dynamics. In 19 – 21 , the handling stability of special vehicles, such as heavy trucks and multiwheel combat vehicles, was analyzed using handling diagrams. As a result, compared to dynamic theory, handling diagrams are easy to obtain and comprehensively describe handling stability for most vehicles. However, for vehicles with a locked di ff erential or tandem rear axle, handling diagrams may be inadequate as the longitudinal forces on the two sides of the vehicle are not equal; see 22 . The new concept of the handling surface has been created to describe vehicle handling stability in these cases
23 , 24 .
To date, there has been too much focus on the handling stability of trucks and passenger cars, but few studies have attempted to characterize that of tractor semitrailers. Therefore, in this paper, the handling stability of tractor semitrailers is studied using handling diagrams, and the impact of vehicle design parameters and motion variables on the vehicle handling stability is analyzed. The research results have great importance for the development of active/passive safety control systems and for ensuring driving safety.
Given the importance of the number of nonsteering rear axles on the tractor on the handling stability of a tractor semitrailer and given that most tractors have one or two, tractor semitrailer when the tractor has two nonsteering rear axles and that when the tractor has one nonsteering rear axle are the two cases discussed in this paper. For simplicity, we refer to them as tractor semitrailers with two rear axles/one rear axle.
2. Handling Stability Analysis of the Tractor Semitrailer
First, we establish the handling equation to be used in plotting the handling diagram.
2.1. Review of Handling Equation for Simple Vehicles
In 14 , Pacejka supposed that the steer angle is small, and the vehicle can be simplified to a bicycle model, and the handling equation for a simple vehicle can be expressed as
δ − l
R
α f
− α r a y
F zf c
αf
−
F zr c
αr
, 2.1
where δ is the steering angle, l is the vehicle’s wheelbase, and R is the turning radius.
α f and
α r are the side-slip angles of the front and rear tires, respectively.
c
αf sti ff ness of the front and rear tires, respectively.
F zf and F zr and c
αr are the cornering are the vertical loads of the front and rear tires, respectively.
a y is lateral acceleration.
Discrete Dynamics in Nature and Society
The compliance factor K and the lateral acceleration are defined as follows:
K a y
F zf c
αf
−
F zr
, c
αr
V 2 gR
,
2.2
2.3
3 where V is driving speed.
2.2. Handling Equations for Tractor Semitrailers
Based on the handling equation for simple vehicles, Winkler 19 produced di ff erent handling equations for complex vehicles, which may be presented in any of the following forms:
δ − l
R
δ − l
R
δ
− l
R
α
α f
− α r
α f f
− α
−
α r r f
1 a y
, V , f
2 a y
,
1
R f
3
V,
1
R
.
,
2.4
2.5
2.6
Di ff erent from 2.1
, except for being a function of lateral acceleration, the tire-side slip angle of complex vehicles may be related to the turning radius when considering multiple nonsteering rear axles or the driving speed when considering the hysteresis e ff ect of the tires . Equation 2.6
, which is just a complement to 2.4
, and 2.5
, cannot be used individually.
It can be seen from 2.1
, 2.4
, and 2.5
that the vehicle handling stability is determined by the di ff erence between the side-slip angles of the front and rear tires. Unlike a single-unit vehicle, a tractor semitrailer is composed of two vehicle units—a tractor and a trailer. The latter is attached to the former at an articulated point, using a fifth wheel coupling.
Therefore, handling stability analysis of a tractor semitrailer is more complex as it must take the handling stabilities of each vehicle unit into account. For simplicity, we suppose that the tire-ground adhesion coe ffi cient is big enough, and the trailer will not experience side-slip.
Then, the tractor semitrailer’s handling stability will be determined by the di ff erence between the side-slip angles of the tractor’s front and rear tires.
According to market surveys, most tractors have one or two nonsteering rear axles, those with two being most popular. Considering the impact of multiple nonsteering axles on vehicle handling stability, the following handling equation introduced by Winkler 19 can be used as the handling equation for a tractor semitrailer with two rear axles:
δ
− l
R
1 /lR 1 c
αr n a y
F zf
/c
/c
αf
αf n i 1
− F zr
/c
αr
Δ i 2
, 2.7
where Δ i is the longitudinal distance from the compound rear axle of the tractor to the i th rear axle and the compound rear axle is located at the longitudinal position about which the vertical loads carried by all rear tires produce a net pitch moment of zero.
4 Discrete Dynamics in Nature and Society
To simplify our analysis of the handling stability, we define the following quantity:
T
1
2
2
Δ i
2
.
i 1
2.8
The nonlinear characteristics of tires on heavy vehicles mainly reflect the relationship between the tires’ vertical loads and cornering sti ff ness, which is commonly described by the following equation introduced by Frendo et al.
24 : c
α c c
1
F z c
2
F 2 z
, 2.9
where c , c
1
, c
2 are constants.
Heavy vehicle tires have more sti ff ness, which makes the tire side-slip angle smaller and keeps the relation between the cornering force and the cornering sti ff ness fairly linear.
This fact can be expressed by
F y
αc
α
, 2.10
where F y is the tires’ cornering force.
Now we define the following quantities:
K
C a y a y
F zf c
αf c
αr c
αf
,
−
F zr
.
c
αr
2.11
According to 2.7
– 2.11
, the handling equation for a tractor semitrailer with two rear axles can be written as follows:
δ − l
R
T lR
1 C a y a y
K a y
.
2.12
The total di ff erentials of δ − l/R and a y can be solved to analyze the change in vehicle handling stability with respect to lateral acceleration: d δ − l
R da y
∂δ
∂V dV
∂δ
∂ l/R
2 V gR dV
V 2 g d
− l
R
1
.
d l
R
, 2.13
2.14
According to 2.12
, the partial di ff erentials of δ with respect to V and l/R are as follows:
∂δ
∂V
2 V gR
K a y a y dK a y da y dC a da y y
, 2.15
∂
∂δ l/R
− 1 l
T
2
1 C a y
V 2 gl
K a y a y dK a da y y dC a y da y
.
2.16
Discrete Dynamics in Nature and Society
Supposing that the turning radius remains constant, we can substitute 2.15
and 2.14
into 2.13
to give
5 d δ − l/R da y
R R c
K a y dC a y da y a y dK a y da y
.
2.17
Now, supposing that the driving speed remains constant, we can substitute 2.16
and
2.14
into 2.13
to give d δ − l/R da y
V V c
Tg lV 2
1 C ay K a y a y dK a y da y dC a y da y
.
2.18
Equations 2.17
and 2.18
give the changes in vehicle handling stability with respect to lateral acceleration holding the turning radius and driving speed constant, respectively.
The handling diagram that is obtained by holding the turning radius constant is called the R -handling diagram, and the corresponding handling curves are called R -handling curves. Similarly the V -handling diagram and V -handling curves refer to the case where the driving speed is held constant.
For a tractor semitrailer with one rear axle, the handling equation and partial di ff erential with respect to a y are as follows: d δ − l/R da y
V V c
δ − l
R d δ − l/R da y a y
K a y
,
R R c
K a y a y dK a y da y
.
2.19
3. Solution of the Tractor Tires’ Vertical Load
From Section 2.2
, we know that the handling stability of a tractor semitrailer is actually determined by the vertical load distribution over the tractor’s front and rear tires.
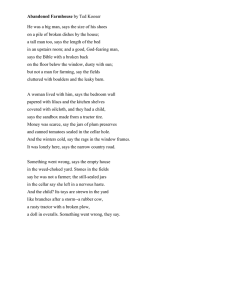
For analytical clearness, the tractor and its trailer are separated at the articulated point, and corresponding forces are applied to both vehicle units, as shown in Figure 1 .
Under steady-state turning, the articulated angle θ between the tractor and trailer always remains small. Thus, we can say cos θ
≈
1 , sin θ
≈
0 .
3.1
The semitrailer is partly supported by the tractor once the two are connected. The load that comes from the trailer and is carried by the tractor can be expressed by
F b l m s 2 m c g, 3.2
6 l
’ b
’ a
’
Semitrailer
F
X
Articulated point
F
Y
CG m
2 a y l
Discrete Dynamics in Nature and Society
Tractor
F yf a b l c
F
X
CG m
1 a y
Articulated point
F
Y
F yr
Figure 1: Representation of tractor semitrailer: main dimensions and lateral forces.
where b is the distance from the center of the trailer’s sprung mass to the compound rear axle, l is the distance from the center of the kingpin to the compound rear axle, m s 2 trailer’s sprung mass, and m c is the loaded mass.
is the
The fifth wheel is installed on the rear of the tractor, which moves the center of gravity
CG of the tractor’s sprung mass backwards when it is towing a trailer. The distance the CG moves can be expressed by
Δ l l m sf 1 b − l c b m s 2 m sr 1 b m m c s 2 m c
, 3.3
where b is the distance from the CG of the tractor’s sprung mass to its compound rear axle, l c is the fifth wheel lead, which is the distance from the center of the fifth wheel’s jaw to the CG of the tractor’s sprung mass, and and rear axles, respectively.
m sf 1 and m sr 1 are the sprung masses of the tractor’s front
According to 3.2
and 3.3
, the vertical loads of the tractor’s front and rear axles when the tractor is towing a trailer can be presented as follows:
F
F zf zr a l m sf 1 m uf 1 m sr 1 m ur 1 g l c l b l l − l c l m b l s 2 m m c s 2 m c g, g,
3.4
where m uf 1 and m ur 1 are the unsprung masses of the tractor’s front and rear axles, respectively, and a is the distance from the CG of the tractor’s sprung mass to the front axle.
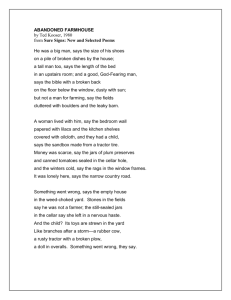
Side-to-side lateral load transfer is generated when a lateral force acts on the vehicles.
As seen from Figure 2 , the lateral load transfers of the tractor’s front and rear tires can be expressed by
Δ
Δ
F
F zf zr a y m s g d f a y m s g d r
1 k r
/k f h s
− m s gh s
/k f b − Δ l l h f
,
1 k f
/k r h s
− m s gh s
/k r a Δ l l h r
,
3.5
Discrete Dynamics in Nature and Society 7
φ
CG
∆ F zf h s k f
φ
Roll center h f
0.5
F y
∆ F zr
Figure 2: Roll plane model of tractor.
0.5 F yf where and d r m s is the tractor’s sprung mass, and the load coming from the trailer is included.
d f are the tractor’s front and rear treads, respectively.
h f and h r are the distances from the ground to the tractor’s front and rear roll centers, respectively.
CG of the tractor’s sprung mass to the tractor’s roll axis.
h s is the distance from the
From 3.4
3.5
, we can obtain the vertical loads of the tires on both sides of the front and rear axles.
4. Simulation and Discussion
First, we introduce the characteristics of the handling diagram before looking at the handling stability simulation for a tractor semitrailer.
4.1. Introduction to Handling Diagrams
A handling diagram for a passenger car under di ff erent driving conditions, obtained using
2.1
– 2.3
, is presented in Figure 3 . In a handling diagram, an upward slope to the left indicates understeer, a vertical slope indicates neutral steer, and an upward slope to the right indicates oversteer. The smaller is the slope, the more likely the vehicle is to understeer or oversteer see in 15 . In Figure 3 , the distance between points A and B is the steering angle needed under the specified driving conditions.
Based on the characteristics of the handling diagram shown, equivalent definitions for understeer, neutral steer, and oversteer for complex vehicles are given in Table 1 see in 19 .
4.2. Vehicle Description
The vehicle characteristics that were used in our numerical simulation of the handling stability of a tractor semitrailer with two rear axles are listed in Table 2 see in 25 . The tractor is a three-axle vehicle unit with single tires on the front axle and dual tires on the two rear axles. The trailer’s rated load is 30,000 kg.
For the tractor semitrailer with one rear axle, the characteristics are the same as for the two rear axle case, except for the tractor’s wheelbase, which is 3.5 m, and the number of tractor tires, which is 8.
8 Discrete Dynamics in Nature and Society
1
0.9
0.8
0.7
0.6
0.5
0.4
0.3
Oversteer
Neutral steer
Understeer
A
δ
B
R =
200 m
0.2
0.1
V =
10 m/s
0
0.05 0.04 0.03 0.02 0.01
0 0.01 0.02 0.03 0.04 0.05
←− δ − l/R l/R −→
Figure 3: Handling diagram for a passenger car.
Table 1: Equivalent definitions for understeer, neutral steer, and oversteer of a complex vehicle.
At a constant radius
At a constant velocity
Oversteer
Neutral steer
Understeer
Oversteer
Neutral steer
Understeer d δ − l/R /da y d d d d d
δ
δ
δ
δ
δ
−
−
−
−
− l/R l/R l/R l/R l/R
/da
/da
/da
/da
/da y y y y y
|
R R
|
R R
|
R R
|
|
V V c c
|
V V c
V V c c c
< 0
0
> 0
< 0
0
> 0
∂δ/∂V <
∂δ/∂V
∂δ/∂V >
0
0
0
∂δ/∂ l/R < 0
∂δ/∂ l/R 0
∂δ/∂ l/R > 0
The load distribution across the tractor’s front and rear axles when it is towing a trailer is determined by the fifth wheel lead, which can be adjusted within a certain range to allow the fifth wheel to engage with the kingpin. The fifth wheel for the tractor with two rear axles is arranged between the two rear axles, and the fifth wheel lead is about 0.3 m. According to collected statistics, the distance between the two rear axles is generally 1.45 m, 1.4 m, 1.37 m,
1.35 m, 1.3 m, and so forth, and 1.35 m is the most common distance. Therefore, the adjustment range for the fifth wheel lead for a tractor with two rear axles is somewhere between 0 and
0.675 m.
To analyze the influence of the fifth wheel lead on the handling stability of a tractor semitrailer with one rear axle, we assume that the adjustment range is the same as for the tractor with two rear axles.
All rear tires are assumed to be the same and to support equal loads. Taking lateral load transfer into consideration, tire cornering sti ff ness can be calculated as the average of the right and left tires’ cornering sti ff ness, and the vertical load can also be assumed to be the average of the right and left loads.
The constants in 2.9
are assumed to take the following values see in 25 : c
2 c 5000 N / rad , c
1
10 .
1 / rad ,
− 11 .
1 / N · rad .
4.1
Discrete Dynamics in Nature and Society
Parameter m sf 1 m uf 1 a l b k f k r d r h r m s 2
Table 2: Characteristics of the tractor semi-trailer with two rear axles.
Value
5069 kg
790 kg
1.288 m
140000 N/rad
202000 N/rad
1.8 m
0.5 m
6000 kg
3.34 m
8.11 m
Parameter m sr 1 m ur 1 b l c d f h f h s a l
T
2
1.8
1.6
1.4
× 10
5
2.4
2.2
1.2
1
0.8
1 2 3
Load
(
N
)
4
× 10
4
5
Figure 4: Tire cornering sti ff ness as a function of vertical load.
Based on the vehicle characteristics presented in Table 2 and the tire property parameters, we can calculate curves showing tire cornering sti ff ness and the ratio of rear tires’ to front tires’ cornering sti ff ness. These are presented in Figures 4 and 5 .
4.3. Influence of Vehicle Parameters on Handling Stability
We use Matlab to simulate the influence of di ff erent vehicle parameters on the handling stability of the tractor semitrailer with one or two rear axles.
4.3.1. Tractor Semitrailer with Two Rear Axles
We use 2.12
to simulate the vehicle handling stability of a tractor semitrailer with two rear axles under either a constant driving speed or turning radius. The simulation results are presented in Figures 6 and 7 .
9
Value
2431 kg
1590 kg
2.687 m
0.3 m
2.2 m
0.5 m
0.242 m
4.77 m
3.975 m
0.36 m
10 Discrete Dynamics in Nature and Society
1.55
1.5
1.45
1.4
1.35
1.75
1.7
1.65
1.6
1.3
1.25
0 0.2
0.4
a y
( g )
0.6
0.8
1
Cargo = 0 kg
Cargo = 1 e + 4 kg
Cargo = 2 e + 4 kg
Cargo
=
3 e +
4 kg
Figure 5: Ratio of rear tire’s to front tire’s cornering sti ff ness.
0.5
0.4
0.3
0.2
0.1
a y
1
( g )
0.9
0.8
0.7
0.6
30 m/s
25 m/s
20 m/s
15 m/s
0.06
0.04
0.02
←− δ − l/R
0 0.02
l/R −→
0.04
0.06
Cargo
=
0 kg
Cargo
=
1 e +
4 kg
Cargo
=
2 e +
4 kg
Cargo = 3 e + 4 kg
Figure 6:
V -handling diagram for tractor semitrailer with two rear axles.
As can be seen in Figures 6 and 7 , the V -handling curves and R -handling curves for a tractor semitrailer with two rear axles are quite similar to one another as the other parameters vary. Figure 5 shows that the range of 1 c
αr tractors, T/lR 1 C a y
/c
αf is 1.3–1.75. As T/lR
, the multiple nonsteering rear axles term in is quite small for most
2.12
has quite a small impact on the vehicle handling stability. However, a slight influence can still be seen in the
Discrete Dynamics in Nature and Society
0.4
0.3
0.2
0.1
a y
1
( g )
0.9
0.8
0.7
R
=
300 m R =
200 m
0.6
0.5
R =
100 m
0.06
0.04
0.02
←− δ − l/R
0 0.02
l/R −→
0.04
Cargo
=
0 kg
Cargo
=
1 e +
4 kg
Cargo
=
2 e +
4 kg
Cargo = 3 e + 4 kg
Figure 7:
R -handling diagram for tractor semitrailer with two rear axles.
11
R -handling diagram, as the starting points of the R -handling curves are not at the origin but at a positive value in the direction of the δ − l/R axis. The same explanation can also be obtained from 2.17
and 2.18
.
The most important finding that can be drawn from Figures 6 and 7 is that a tractor semitrailer with two rear axles has great handling stability within the trailer’s rated load range. The tractor has four times as many rear tires as front tires, making both the vertical load and the load transfer of a single rear tire smaller than those of a single front tire. In addition to the rear tire’s strong sti ff ness, K a y in 2.12
is positive, and the vehicle has great handling stability. However, there is a fall in the value of dC a y
/da y in 2.17
due to the increase in loaded mass, and this becomes negative when the loaded mass reaches a certain value. As the minimum value is larger than K a y dC a y
/da y can reach is − 0.06, which in absolute value terms
0.028–0.0525
, the vehicle handling stability becomes poor under an increase in the loaded mass.
Therefore, the excellent handling stability of a tractor semitrailer with two rear axles owes more to its rear tires than to its multiple nonsteering rear axles. Unlike the conclusions drawn in 19 , we find that multiple nonsteering rear axles do not strengthen the vehicle’s handling stability but weaken it.
A handling diagram for a tractor semitrailer with two rear axles and varying fifth wheel leads is presented in Figure 8 . The influence of the fifth wheel lead on vehicle handling stability is quite small. However, the larger the fifth wheel lead is, the better handling stability the vehicle has.
4.3.2. Tractor Semitrailer with One Rear Axle
For a tractor semitrailer with one rear axle, the V -handling and R -handling curves coincide.
However, for analytical convenience, we present the two diagrams separately, in Figures 9 and 10 .
12 Discrete Dynamics in Nature and Society
1
0.9
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0
0.03
0.025
0.02
0.015
δ − l/R
0.01
0.005
0
Fifth wheel lead = 0 .
3 m
Fifth wheel lead = 0 .
1 m
Fifth wheel lead
=
0
.
6 m
Figure 8: Handling diagram for a tractor semitrailer with two rear axles and varying fifth wheel leads.
0.7
0.6
0.5
0.4
0.3
0.2
0.1
a y
1
( g )
0.9
0.8
B ⋆
C
⋆
V = 30 m/s
V =
25 m/s
V = 20 m/s
V = 15 m/s
0.04
0.02
←− δ − l/R
0 0.02
l/R −→
0.04
0.06
Cargo
=
0 kg
Cargo
=
1 e +
4 kg
Cargo
=
2 e +
4 kg
Cargo = 3 e + 4 kg
Figure 9:
V -handling diagram for tractor semitrailer with one rear axle.
As Figures 9 and 10 show, vehicle handling stability quickly becomes poor as the loaded mass increases. In a fully loaded situation, the vehicle handling stability presents an understeering characteristic in a narrow lateral acceleration range and then turns into a neutral steer or oversteering situation.
Discrete Dynamics in Nature and Society a y
1
( g
)
0.9
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
R =
300 m
B
A
R =
200 m
C
R =
100 m
0.04
0.02
←− δ − l/R
0 0.02
l/R −→
0.04
0.06
Cargo
=
0 kg
Cargo
=
1 e +
4 kg
Cargo
=
2 e +
4 kg
Cargo = 3 e + 4 kg
Figure 10:
R -handling diagram for tractor semitrailer with one rear axle.
13
Figure 9 shows that the driving speed has a large impact on the vehicle handling stability when the loaded mass is large. When the loaded mass is 30,000 kg and driving speeds are 20 m/s, 25 m/s and 30 m/s, respectively, the critical lateral acceleration values at which instability may occur are at points A 0.8446 g , B 0.7031 g , and C 0.5203 g . An increase in driving speed will further weaken the vehicle handling stability and eventually result in instability. Considering heavy vehicles’ rollover thresholds, such vehicles are prone to rollover accidents at low speeds and handling instability accidents at high speeds, even if the turning radius is quite large R 177 m at point C .
Figure 10 shows that, when the loaded mass is 30,000 kg and the turning radii are
100 m, 200 m, and 300 m, respectively, the intersection points between the l/R lines and the
R -handling curve occur at points C, B, and A. The physical meaning of these intersection points is that the vehicle loses steering capacity δ 0 and rotates on its axis. The corresponding driving speeds for points A, B, and C are 39 m/s, 35.67 m/s, and 29.6 m/s, respectively, which are obtained from 2.3
. Taking into account the strong impact of driving speed on vehicle handling stability, even if the turning radius is large and there is no apparent road curvature, the vehicle will still lose its original stability in these conditions.
Based on the previous analysis, a vehicle handling stability threshold defined by driving speed is more appropriate than one defined by lateral acceleration. This implies that it is important to set limits on the driving speeds of heavy vehicles on highways.
The handling diagram for a tractor semitrailer with one rear axle and varying fifth wheel leads is presented in Figure 11 . The same conclusions can be drawn as in the case of two rear axles. Due to the poor handling stability of the tractor with one rear axle, the fifth wheel lead should be as large as possible when the loaded mass is large.
4.4. Conclusions
In this paper, we analyze the handling stability of tractor semitrailers with one or two rear axles, based on handling diagrams. The following conclusions are obtained.
14 Discrete Dynamics in Nature and Society
1
0.9
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0
0 0.01
0.02
0.03
l/R
0.04
0.05
0.06
Fifth wheel lead
=
0
.
3 m
Fifth wheel lead = 0 .
1 m
Fifth wheel lead = 0 .
6 m
Figure 11: Handling diagram for a tractor semitrailer with one rear axle and varying fifth wheel leads.
1 Tractor semitrailers with two rear axles have better handling stability than those with just one. Within the rated load range, the former always show good steering performance. This result is due to the larger number of rear tires on the two-rearaxle vehicle.
2 For a tractor with one rear axle, towing a trailer with a suitable total mass and driving at a low speed are quite important. This tractor semitrailer will lose handling stability when overloaded or if driven at high speeds. The vehicle may even lose steering capacity at high speeds.
3 Driving speed has much more influence on vehicle handling stability than the turning radius. Even on a gentle curve, these vehicles should not be driven at speeds above a certain level.
4 Fifth wheel lead has a slight influence on the handling stability of tractor semitrailers with one and with two rear axles. However, for tractors with one rear axle, it is especially important that the fifth wheel lead should be as large as possible in order to improve vehicle handling stability.
Since we make the assumption in deriving the handling equations that the tire-ground adhesion coe ffi cient is su ffi ciently large, the handling equations are limited to analyzing handling stability for vehicles driven under certain road and driving conditions only. Thus, handling stability analysis for tractor semitrailers driven on slippery roads will be conducted in a future study.
Acknowledgments
This research is supported by “Research on Evaluation and Detection Technology of
Handling and Driving Stability for Commercial Vehicles no. 2009BAG13A04 ” as part of the Major Project of the 11th Five-Year National Science and Technology Support Program:
Discrete Dynamics in Nature and Society 15 serious road tra ffi c accident prevention and integrated disposal technology development and demonstration applications, organized by the Ministry of Science and Technology, Public
Security, and Transportation of China.
References
1 H. G. Xu, T. Peng, and H. F. Liu, “Feedback linearization for steering stability control of tractorsemitrailer,” Journal of Jilin University, vol. 42, no. 2, pp. 272–278, 2012.
2 Z. W. Guan, X. J. Wang, and M. F. Zheng, “Analysis of steering stability of tractor-semitrailer combination vehicle,” Automobile Technology, no. 6, pp. 41–45, 2011.
3 S. Chang, H. G. Xu, and H. F. Liu, “Simulation on steering stability of 4WS tractor semi-trailer,” in Proceedings of the International Conference on Measuring Technology and Mechatronics Automation
(ICMTMA ’09), pp. 355–358, April 2009.
4 W. H. Wang, W. Zhang, H. W. Guo, H. Bubb, and K. Ikeuchi, “A safety-based approaching behavioural model with various driving characteristics,” Transportation Research Part C, vol. 19, no. 6, pp. 1202–
1214, 2011.
5 W. H. Wang, “A digital-driving system for smart vehicles,” IEEE Intelligent Systems, vol. 17, no. 5, pp.
81–83, 2002.
6 W. H. Wang, M. Yan, J. Jin et al., “Driver’s various information process and multi-ruled decisionmaking mechanism: a fundamental of intelligent driving shaping model,” International Journal of
Computational Intelligence Systems, vol. 4, no. 3, pp. 297–305, 2011.
7 K. Hussain, W. Stein, and A. J. Day, “Modelling commercial vehicle handling and rolling stability,”
Journal of Multi-Body Dynamics, vol. 219, no. 4, pp. 357–369, 2005.
8 E. Dahlberg and N.G. Vagstedt, “Advantages of a simple approach modeling heavy vehicle handling,” SAE Special Publications, vol. 1308, pp. 113–120, 1997.
9 W. Chen, Z. Zhang, and C. Zhou, “Simulation for the handling and stability of four-wheel steering vehicle based on Matlab/simulink,” in Proceedings of the 2nd International Conference on Transportation
Engineering (ICTE ’09), pp. 1908–1913, July 2009.
10 Q.F. Zhao, T. He, and W. J. Xu, “The research of vehicle handling stability based on ADAMS,” Applied
Mechanics and Materials, vol. 127, pp. 248–251, 2012.
11 K. Mathijs, Longitudinal force distribution and road vehicle handling [Ph.D. thesis], Department of Applied
Mechanics, Chialmers University of Technology, 2010.
12 N. Vincent, Vehicle handling, stability, and bifurcation analysis for nonlinear vehicle models [M.S. thesis],
Department of Mechanical Engineering, University of Maryland, 2005.
13 L. Liu, Nonlinear analysis and control strategy evaluation on the stability of vehicle 3-DOF planar motion
[Ph.D. thesis], College of Tra ffi c, Jilin University, 2010.
14 H. B. Pacejka, “Simplified analysis of steady-state turning behaviour of motor vehicles—part 1.
Handling diagrams of simple systems,” Vehicle System Dynamics, vol. 2, no. 3, pp. 161–172, 1973.
15 H. B. Pacejka, “Simplified analysis of steady-state turning behaviour of motor vehicles—part 2: stability of the steady-state turn,” Vehicle System Dynamics, vol. 2, no. 4, pp. 173–183, 1973.
16 H. B. Pacejka, “Simplified analysis of steady-state turning behaviour of motor vehicles—part 3: more elaborate systems,” Vehicle System Dynamics, vol. 2, no. 4, pp. 185–204, 1973.
17 A. F. Daniel and S. Adam, “Passenger vehicle steady-state directional stability analysis utilizing
EDVSM and SIMON,” in Proceedings of the WP HVE Forum, San Francisco, Calif, USA, May 2004.
18 S. Lukowski, M. Momot, D. Kraemer, and D. Kunz, “Basic linear theory of handling and stability of automobiles,” Journal of Automobile Engineering, vol. 223, no. 1, pp. 1–10, 2009.
19 C. B. Winkler, “Simplified analysis of the steady-state turning of complex vehicles,” Vehicle System
Dynamics, vol. 29, no. 3, pp. 141–180, 1998.
20 E. C. Yeh and Y. L. Chen, “Handling analysis of a motorcycle with added cambering of the front frame,” Vehicle System Dynamics, vol. 19, no. 2, pp. 49–70, 1990.
21 M. J. Hillegass, J. G. Faller, M. S. Bounds, M. El-Gindy, and A. S. Joshi, “Validating the directional performance of multi-wheeled combat vehicle computer simulation models,” in Proceedings of
the ASME International Mechanical Engineering Congress and Exposition (IMECE ’04), pp. 781–789,
November 2004.
16 Discrete Dynamics in Nature and Society
22 F. Frendo, G. Greco, and M. Guiggiani, “Critical review of handling diagram and understeer gradient for vehicles with locked di ff erential,” Vehicle System Dynamics, vol. 44, no. 6, pp. 431–447, 2006.
23 F. Frendo, G. Greco, M. Guiggiani, and A. Sponziello, “The handling surface: a new perspective in vehicle dynamics,” Vehicle System Dynamics, vol. 45, no. 11, pp. 1001–1016, 2007.
24 F. Frendo, G. Greco, M. Guiggiani, and A. Sponziello, “Evaluation of the vehicle handling performances by a new approach,” Vehicle System Dynamics, vol. 46, no. 1, pp. 857–868, 2008.
25 D. J. M. Sampson, Active roll control of articulated heavy vehicles [Ph.D. thesis], Churchill College, University of Cambridge, 2000.
Advances in
Operations Research
Volume 2014
Advances in
Decision Sciences
Volume 2014
Mathematical Problems in Engineering
Volume 2014
Algebra
Volume 2014
Journal of
Probability and Statistics
Volume 2014
The Scientific
World Journal
Hindawi Publishing Corporation http://www.hindawi.com
Volume 2014
International Journal of
Differential Equations
Volume 2014
Submit your manuscripts at http://www.hindawi.com
International Journal of
Combinatorics
Hindawi Publishing Corporation http://www.hindawi.com
Volume 2014
Advances in
Mathematical Physics
Hindawi Publishing Corporation http://www.hindawi.com
Volume 2014
Journal of
Complex Analysis
Volume 201 4
Journal of
Mathematics
Volume 2014
International
Journal of
Mathematics and
Mathematical
Sciences
Journal of
Discrete Mathematics
International Journal of
Stochastic Analysis
Volume 201 4
Abstract and
Applied Analysis
Volume 201 4
Journal of
Applied Mathematics
Discrete Dynamics in
Nature and Society
Volume 201 4
Volume 2014
Journal of
Function Spaces
Hindawi Publishing Corporation http://www.hindawi.com
Volume 2014
Hindawi Publishing Corporation http://www.hindawi.com
Volume 2014
Journal of
Optimization
Hindawi Publishing Corporation http://www.hindawi.com
Volume 2014
Hindawi Publishing Corporation http://www.hindawi.com
Volume 2014
Hindawi Publishing Corporation http://www.hindawi.com