Hindawi Publishing Corporation Discrete Dynamics in Nature and Society pages
advertisement

Hindawi Publishing Corporation
Discrete Dynamics in Nature and Society
Volume 2008, Article ID 793512, 21 pages
doi:10.1155/2008/793512
Research Article
Model-Matching-Based Control of
the Beverton-Holt Equation in Ecology
M. De La Sen and S. Alonso-Quesada
Department of Electricity and Electronics, Faculty of Science and Technology,
Institute of Research and Development of Processes, Campus of Leioa, 48940 Leioa Bilbao, Spain
Correspondence should be addressed to M. De La Sen, manuel.delasen@ehu.es
Received 24 July 2007; Revised 24 September 2007; Accepted 16 November 2007
Recommended by Juan Jose Nieto
This paper discusses the generation of a carrying capacity of the environment so that the famous
Beverton-Holt equation of Ecology has a prescribed solution. The way used to achieve the tracking
objective is the design of a carrying capacity through a feedback law so that the prescribed reference
sequence, which defines the suitable behavior, is achieved. The advantage that the inverse of the
Beverton-Holt equation is a linear time-varying discrete dynamic system whose external input is the
inverse of the environment carrying capacity is taken in mind. In the case when the intrinsic growth
rate is not perfectly known, an adaptive law implying parametrical estimation is incorporated to
the scheme so that the tracking property of the reference sequence becomes an asymptotic objective
in the absence of additive disturbances. The main advantage of the proposal is that the population
evolution might behave as a prescribed one either for all time or asymptotically, which defines the
desired population evolution. The technique might be of interest in some industrial exploitation
problems like, for instance, in aquaculture management.
Copyright q 2008 M. De La Sen and S. Alonso-Quesada. This is an open access article distributed
under the Creative Commons Attribution License, which permits unrestricted use, distribution,
and reproduction in any medium, provided the original work is properly cited.
1. Introduction
The nonautonomous discrete so-called Beverton-Holt equation BHE is very common in Ecology and, in particular, in studying the growth population dynamics see, e.g., 1–9. The equation is of great importance in the fishery industry concerning the growth and exploitation of
species like, for instance, plaice, haddock and coho salmon, as well as other bottom feeding
fish populations 1. It is proven that, for subcritical biomass, according to a low value of the
intrinsic growth rate of the studied population, zero is a stable attractor if the carrying capacity
is not independent of the intrinsic growth rate in order that the model is well posed. In particular, the carrying capacity should decrease as the spawning stock decreases converging to
zero. The BHE is a two-parameter widely used nonlinear equation of the form 1–9
2
Discrete Dynamics in Nature and Society
xk1 μk Kk xk
,
Kk μk − 1 xk
k ∈ N0 : N ∪ {0},
1.1
with N being the set of natural numbers, where x0 > 0, μk ∈ R0 : R ∪ {0} R being the set of
positive real numbers is the intrinsic growth rate of the population, determined by life cycle and
demographic properties specie growth rate, survivorship rate, etc., and Kk ∈ R , so-called
the environment carrying capacity, is a characteristic of the habitat being dependent on resources
availability, temperature, humidity, and so on. Typically, μk > 1 and Kk Kkp ∈ R0 , for some
p≥ 2 ∈ N, due to periodic fluctuations. It has been reported that a negative carrying capacity
is nonsense since a small carrying capacity is sufficient to interpret a very unfavorable situation
for the population 6, even to model the so-called Allee effect, that is, the difficulty of finding
mates due to the very scarce number of population 7. Note that Kk 0 is sufficiently unfavorable to extinguish the population since, from 1.1, a recruitment xk1 0 would occur for
any spawning stock. The population extinction has been dealt with in 10 for intrinsic growth
rates less than unity by discussing the spawning stock biomass conditions for the zero equilibrium to be a stable attractor. It has been concluded that the environment carrying capacity
is not independent of the intrinsic growth rate for subcritical spawning stock biomass. Generalizations of the BHE including bounded discontinuities at sampling points, which can be
interpreted as the consequence of impulsive effects 11, in the generating continuous logistic
equation, have been also studied.
This paper is devoted to the model matching of a prescribed reference model which is
also defined in practice by a BHE. The standard case of intrinsic growth-rate sequences being
greater than unity is considered. The environment carrying capacity is locally modified around
its reference values to achieve the prescribed behavior. Its inverse plays the role of the control
of the IBHE, namely, the inverse of the BHE which is a linear dynamic system 9, and then
much easier to deal with than the BHE. The control law consists of calculating the appropriate
carrying capacity inverse so that the solution of the IBHE namely, the inverse of the population levels coincides with the solution of the reference IBHE. In that way, the population
levels also coincide with the reference-suited ones. In the case when the intrinsic growth rate
is not exactly known, the scheme is extended by incorporating parametrical estimation and a
related adaptive control law. The tracking objective becomes asymptotic as a result of the incorporation of the estimation process. Since, in many practical situations, the reference model
and the current one are locally deviated from each other, the solution matches very closely the
reference solution for all time. The proposed technique is very feasible in close or semi-open
environments like, for instance, aquaculture industry, for instance, by local modification of the
temperature. In the case when the BHE parameters are not exactly known, an adaptive extension of the method incorporating parameter estimation is used instead. The paper is organized
as follows. Section 2 is devoted to the statement of a control law for the case of known parameters. The BHE is generalized to include, if suited, additive disturbances which may be useful to
describe uncertainties in the parameters of the BHE or phenomena which are not included in
the nominal standard equation like, for instance, local or global migrations of the population.
The reference model to be tracked also often referred to as “matched” in the literature is also
a BHE which potentially includes additive disturbances corresponding to those present in the
given BHE being defined as that possessing as its solution, the IBHE of the given BHE. Such
an inverse has a linear structure by nature so that it is easy to deal with, and it describes the
appropriate system behavior. The control law is of a feedback type and consists of designing
appropriately the environment carrying capacity, within some prescribed margins, so that the
M. De La Sen and S. Alonso-Quesada
3
reference model is perfectly tracked i.e., the solution of the controlled equation and that of
the reference model coincide for all samples. This is very feasible in closed environments like,
for instance, fisheries. It turns out that the achievement of a perfect tracking of the IBHE corresponds to achieving the objective of a perfect tracking of the corresponding reference BHE.
Section 3 extends the method to the adaptive case by incorporating an adaptive scheme. It is
assumed that certain a priori knowledge on the additive disturbances is available so that a
relative dead zone is used in the adaptation algorithm to freeze the adaptation under smalladaptation errors to prevent against stability caused by the disturbances when the parameters
are not fully known 12. The adaptive control law is implemented by replacing the controller
parameters in the case of perfect knowledge by those computed based on the estimates of
the IBHE. The closed-loop system is proven to be stable if the additive disturbances grow, at
most linearly, with the maximum of the solution of the IBHE. In the adaptive case, the tracking
objective is only achievable asymptotically provided that the contribution of the additive disturbances is zero or becomes extinguished asymptotically. The method to discuss the stability
and convergence of estimates relies on the use of a Lyapunov sequence, 8, 13, 14. Section 4
presents two numerical examples and, finally, conclusions end the paper.
2. Control law for the case of known parameters
Define an inverse system of 1.1 through the change of variable sk xk−1 resulting directly
from 1.1 in the time-varying discrete linear system
sk1 ak sk bk uk ,
s0 x0−1 > 0,
2.1
, bk 1 − μ−1
1 − ak , and uk Kk−1 , that is, the inverse carrying capacity is the
where ak μ−1
k
k
control action. If there exists an additive disturbance sequence ηk in 2.1, one gets, instead of
2.1 9,
sk1 ak sk bk uk ηk .
2.2
, to an extended BHE
The IBHE 2.2 corresponds, through the change of variable xk s−1
k
which includes a sequence of additive disturbances:
xk1 μk Kk xk
Kk x k
ak Kk bk Kk ηk xk Kk μk − 1 μk Kk ηk xk
μk Kk xk
μk Kk xk
vk ,
0
K
μ k − 1 xk
Kk μk − 1 xk vk
k
2.3
where
vk0 μk Kk ηk xk ,
vk − μk Kk xk vk0
Kk μk − 1 xk Kk μk − 1 μk Kk ηk xk
−
μ2 K 2 x2 ηk
k k k
.
Kk μk − 1 xk Kk μk − 1 μk Kk ηk xk
2.4
4
Discrete Dynamics in Nature and Society
Note that the sequence {vk }∞
0 is an additive disturbance of the BHE which is identically zero if
the additive disturbance sequence {ηk }∞
0 of its inverse is identically zero. The disturbance may
include the effects in the solution of parametrical uncertainties, for instance, in the intrinsic
growth rate, or effects like, for instance, migrations or local migrations which are not taken
into account in the standard BHE. The following assumptions are concerned with the stability
and controllability of the IBHE and with the knowledge of an upper bound of the disturbance
term if such a disturbance is unknown.
Assumption 2.1. ∞ > μk ≥ 1 εμ and ∞ > Kk ≥ εK , for all k ∈ N0 , and some εμ ∈ R , εK ∈ R .
is known.
Assumption 2.2. ηk ∈ R0 ≤ ηk , for all k ∈ N0 , and {ηk }∞
0
Note that Assumption 2.1 implies that the BHE is stable since μ−1
< 1, and also controlk
lable since bk ≥ εμ : εμ /1 εμ > 0 so that 1 − μ−1
,
for
all
k
∈
N
,
so
that sk in 2.2, and
0
k
then the BHE solution xk s−1
may
be
driven
to
sequences
of
prescribed
values. These two
k
properties are crucial for the solution to track a prescribed reference sequence. Note also that εμ
may be chosen in the real interval 0,1 without any loss in generality since, if Assumption 2.1
holds for any given εμ > 0, then it always holds for some εμ ∈ 0, 1. This fact is used in the
proof of the subsequent result, which is direct and related to the positivity and boundedness
of the solution.
Assertion 2.3. If Assumptions 2.1 and 2.2 hold and {ηk }∞
0 is uniformly bounded, then all solutions of the BHE and the IBHE are uniformly bounded and positive, provided that ∞ > x0 > 0.
Proof. μk ≥ 1 εμ ⇔ bk ∈ εμ , 1 − εμ . Define ρ : Max0≤k<∞ μ−1
∈ 0, 1/1 εμ ⊆ 0, 1. Since
k
−1
s0 x0 > 0, it follows from 2.2 that
0 < xk−1 sk ≤ ρk s0 k−1
ρk−i−1 1 − εμ Ki−1 ηi
i0
1 − εμ2
−1
1 − ρk ≤ ρ s0 Max ηi < ∞
1 − εμ Max Ki ηi ≤ s0 0≤i<∞
1−ρ
εμ εK 0≤i<∞
k
⇐⇒ xk ∈ 0, ∞,
∀k ∈ N0 , since
2.5
1 − εμ
1
1
, Max Ki−1 ≤
.
≤
1−ρ
εK
εμ 0≤i<∞
The subsequent set of structures is considered in order to be then able to formulate the
control law.
1 A reference
∗
BHE xk1
μ∗k Kk∗ xk∗ /Kk∗ μ∗k − 1xk∗ , for all k ∈ N0 , which defines the suitable solution
through the appropriate reference values of the intrinsic growth rate and the environment
carrying capacity of its corresponding reference IBHE s∗k1 a∗k s∗k bk∗ rk , with reference input
rk Kk∗ −1 > 0, and parameter sequences a∗k μ∗k −1 < 1 and bk∗ μ∗k −1 > 0.
M. De La Sen and S. Alonso-Quesada
5
2 The current
BHE xk1 μk Kk Xk /Kk μk − 1xk vk and its corresponding IBHE
sk1 ak sk bk uk ηk ,
2.6
, bk 1 − μ−1
are deviated from the suited ones a∗k μ∗k −1
whose parameters are ak μ−1
k
k
∗
∗ −1
and bk 1 − μk , which may include disturbance terms grouped in a sequence {vk }∞
0 with
control input uk Kk−1 obtained according to a feedback law.
3 The control law:
uk tk rk fk sk − ωk ,
2.7
provided that ηk is known, which is a relaxation of Assumption 2.2 which is parameterized by
fk a∗k − ak
bk
,
tk bk∗
bk
,
ωk ηk
,
bk
2.8
with bk 1 − ak 1 − μ−1
. Note that the control law generates the inverse carrying capacity
k
from the reference inverse carrying capacity and the solution of the IBHE with two paramet∞
∞
rical sequences {fk }∞
0 and {tk }0 and a correcting sequence {ωk }0 calculated from 2.8. The
subsequent constraint
rk Kk∗
−1
ωk xk − fk
1
>
tk xk
tk
ak − a∗k
ηk
1 − ak
xk
2.9
must hold for all samples to guarantee that the environment carrying capacity is positive. The
following result establishes that the tracking error in between the reference sequence and the
current solution for the given control law is zero. In that way, the perfect tracking objective is
achieved if the disturbance sequence is known.
Proposition 2.4. If s0 s∗0 , then the control law 2.7-2.8 achieves an identically zero tracking error
{εk : sk − s∗k }∞
0 .
Proof. It follows, by complete induction, by assuming sk s∗k ⇔ εk 0, for all k ∈ N0 , that
εk1 ak bk fk − a∗k s∗k bk tk − bk∗ rk 0,
∀k ∈ N0 .
2.10
If the disturbance is unknown, but Assumption 2.2 still holds, then the last identity in
the parameterization of the control law in 2.8 is replaced, with similar expressions, with the
disturbances absolute upper bounds, namely, ωk ηk /bk , where |ηk | ≤ ηk . Thus the tracking
error is not identically zero but it is uniformly bounded. It is also very close to zero, provided
that the deviation of the upper bound of the disturbance with respect to such a disturbance is
very close to zero. Then one has the subsequent result.
6
Discrete Dynamics in Nature and Society
Proposition 2.5. If Assumption 2.1 holds and |ηk | ≤ ηk with ηk being unknown, but ηk being known,
then the control law 2.7-2.8 of Proposition 2.4, with the modification ωk ηk /bk , achieves a uniformly bounded tracking error {εk : sk −s∗k }∞
0 , provided that the disturbance sequence is upper bounded
by a bounded sequence.
Proof. Direct calculations yield
sk1 ak sk bk uk ηk ,
s∗k1 a∗k s∗k bk∗ rk
2.11
so that, from 2.7-2.8,
εk1 a∗k εk ηk − ηk ≤ a∗ k1 ε0 mη
< ∞,
1 − a∗
∀k ∈ N0 ,
2.12
where 0 < a∗k ≤ a∗ < 1, for all k ∈ N0 , and
mη : Max ηi − ηi ≤ 2Max ηi < ∞.
0≤i<∞
2.13
0≤i<∞
Since the inverse of the environment carrying capacity is the control action, a large
deviation from its nominal values for tracking purposes may be not admissible. Note that
Assumption 2.1 also applies to the reference to be tracked by the control action consisting of
appropriate achievement of an environment carrying capacity, that is, ∞ > μ∗k ≥ 1 εμ > 1,
and ∞ > Kk∗ ≥ εk > 0, for all k ∈ N0 . That means that the maximum deviation of the suited
reference sequence, related to the current solution, depends on the maximum allowed variations of the environment carrying capacity with respect to its nominal value. More precisely,
the subsequent result follows.
Proposition 2.6. Assume that the maximum allowed absolute variation of the carrying capacity with
respect to its nominal value is ΔK > 0. Then the following properties hold.
∗
∗
i The control parameter sequence {tk }∞
0 is subject to the constraint tk ∈ 1 − ΔK /Kk , 1 ΔK /Kk ,
for all k ∈ N0 , which induces the parametrical constraints
ak ∈
Kk∗ a∗k − ΔK Kk∗ a∗k ΔK
,
,
Kk∗ − ΔK
Kk∗ ΔK
bk ∈
Kk∗ bk∗
,
Kk∗ bk∗
Kk∗ ΔK Kk∗ − ΔK
.
2.14
ii The tracking-error sequence {εk : sk − s∗k }∞
is subject to the constraint
0
ΔK
ΔK
εk1 − ak εk a∗k − ak s∗k ∈ ηk − bk∗ ∗ 2 , ηk bk∗ ∗ 2 ,
Kk
Kk
2.15
for all k ∈ N0 , which is trivially bounded, provided that the disturbance sequence is bounded.
iii A positive carrying capacity is obtained from the controller synthesis if Kk∗ −1 > ωk xk −
fk /tk xk 1/tk ηk /1 − ak ak − a∗k /xk , when ηk is unknown but ηk ≥ |ηk | is
known. The control parameter tk ∈ 0, 1 and the calculated Kk from the control law are positive if tk is calculated satisfying ΔK ∈ 0, Kk∗ − ηk /1 − ak a∗k − ak /xk with ηk ∈
0, 1 − ak Kk∗ ak − a∗k /xk .
M. De La Sen and S. Alonso-Quesada
7
Proof. i Note that
∗
Kk 1 − a∗k Kk∗ 1 − a∗k
ΔK
ΔK
tk ∈ 1 − ∗ , 1 ∗ ⇐⇒ 1 − ak ∈
,
Kk
Kk
Kk∗ ΔK
Kk∗ − ΔK
Kk∗ 1 − a∗k
Kk∗ 1 − a∗k
≥ ak ≥ 1 −
,
⇐⇒ 1 −
Kk∗ ΔK
Kk∗ − ΔK
2.16
which yields directly Property i since bk 1 − ak .
ii One gets from 2.6–2.8 and Property i that
εk1 sk1 − s∗k1 ak εk ak − a∗k s∗k tk − 1 bk∗ rk ηk
ΔK
ΔK
∈ ak εk ak − a∗k s∗k − ∗ bk∗ rk ηk , ak εk ak − a∗k s∗k ∗ bk∗ rk ηk ,
Kk
Kk
2.17
and the result follows.
iii The first part follows with the replacement of ηk → ηk ≥ |ηk | in 2.9. The second part
follows directly by replacing the admissibility domain of the controller parameter tk in
the above constraint.
3. Adaptive control
For the case when the parameters of the BHE are unknown, an estimation scheme with adaptation dead zone for robust closed-loop stabilization is incorporated see, e.g., 12, 13, 15, 16.
Such a mechanism governs the evolution of the IBHE and it is now discussed from a theoretical
point of view. It will then corroborate, through numerical simulation, the potential usefulness
of numerical and adaptive techniques as previously tested in some ecological models see, e.g.,
17–19. One takes the advantage that, since the parameters fulfill the constraint ak bk 1,
for all k ∈ N0 , the same constraint might be introduced in the estimation scheme, what reduces it to the estimation of one parameter only. A modification would consist of estimating
both sequences of parameters separately. In that case, the estimation is performed without taking into account the parametrical constraint at the expense of an increase in computation time
and memory storage. However, it may be proven that all the properties of boundedness and
convergence of the estimates still hold if existing parametrical constraints are not taken into
account, provided that each parameter is updated with its corresponding component in the set
of measured data see, e.g., 12, 13, 15. In a first step, a simple procedure is developed for
the nominal BHE through controlling its inverse, and then an extension is made to prevent a
good operation in the presence of additive disturbances. A relative dead zone to the estimation
scheme is added to prevent potential instability caused by those disturbances.
3.1. Adaptive control approach based on the intrinsic growth rate estimate
Additive disturbances
The deviations of the intrinsic growth rate with respect to a certain unknown constant value
μ a−1 , implying b 1 − a, are incorporated within a disturbance sequence {ηk }∞
0 which can
8
Discrete Dynamics in Nature and Society
∞
also include other unstructured disturbance contributions in a sequence {ηk0 }0 :
ηk : ak − a sk bk − b uk ηk0 ak − a sk − uk ηk0 ,
3.1
and uk Kk−1 . In this way, the nominal parameter vector of the IBHE, namely, θ a, bT , is
constant, which then facilitates an updating algorithm that has an identical structure for the
parameter estimates as for the parametrical errors. The IBHE, its estimate, the identification
error, the reference IBHE, the tracking error, and the parameter-adaptive law are, respectively,
as follows.
IBHE
sk1 ask buk ηk a sk − uk uk ηk .
3.2
If ηk ≡ 0, the resulting particular case of 3.2 is called the nominal IBHE, and its corresponding
∞
inverse equation, whose solution is the sequence {xk ≡ s−1
} , is called the nominal BHE.
k 0
Estimate of the IBHE
s
k1 a
k sk b
k uk a
k sk − uk uk ,
3.3
where a
k and b
k 1 − a
k are the estimates of a and b at the kth sample.
Identification error
ek1 : sk1 − s
k1 −
ak sk − bk uk ηk −
ak sk − uk ηk ,
3.4
ak are the parametrical errors. Note that although
where ak : a
k − a, b
k : b
k − b a − a
k −
ηk is unknown, the identification error is available for measurement through the first identity
in 3.4.
Reference IBHE
It is assumed to be time invariant as the nominal IBHE, namely,
s∗k1 a∗ s∗k b∗ rk a∗ s∗k − rk rk
3.5
with b∗ 1 − a∗ and rk Kk∗ −1 , is the reference environment carrying capacity inverse.
Tracking error
εk1 : s∗k1 − sk1 s∗k1 − s
k1 s
k1 − sk1 s∗k1 − s
k1 − ek1 .
3.6
M. De La Sen and S. Alonso-Quesada
9
Adaptation Algorithm 1:
a
k1
σk sk − uk ek1
a
k 2 ,
1 γk sk − uk
a
0 ∈ 0, 1, ∀k ∈ N0 ,
3.7
∞
is a recursive estimation of the intrinsic growth rate, where {σk }∞
0 and {γk }0 are real sequences
satisfying σk ≥ 0, γk > 0 to be specified later for purposes of convergence of the algorithm. The
control law has the same structure as 2.7–2.9 by replacing the true parameters by its estimates, and by deleting the correcting sequence ωk . Instability drawbacks due to disturbances
will be dealt with by using a specific dead-zone updating rule for the sequence σk ≥ 0 in the
parameter-adaptive algorithm.
Adaptive control law:
uk tk rk fk sk 1 1 − a∗k rk a∗k − a
k sk
1 − a
k
3.8
with rk Kk∗ −1 with the sample-dependent controller parameters
fk a∗k − a
k
1 − a
k
,
tk 1 − a∗k
1 − a
k
3.9
.
The following result concerning useful technical relationships in between the IBHE solution,
its estimated IBHE, and the reference IBHE independent of the parameter adaptive algorithm
is immediate.
Proposition 3.1. The adaptive control law 3.8-3.9 leads to s
k s∗k (i.e., the estimated solution
equalizes the reference solution), εk −ek (i.e., the tracking error equalizes the minus-identification
error), for all k ∈ N, for any finite s0 , s
0 s∗0 . The above results are independent of the parameteradaptive algorithm.
Proof. Proceed, by induction, by assuming s
k s∗k for any given k ∈ N0 . Then one gets, from
3.8-3.9 into 3.3 by using b
k 1 − a
k ,
s
k1 a
k sk 1 − a
k tk rk fk sk a
k 1 − fk fk sk 1 − a
k tk rk
a∗k sk bk∗ rk s∗k1
3.10
if sk s∗k , and then using 3.6,
εk1 s∗k1 − s
k1 s
k1 − sk1 s
k1 − sk1 −ek1 ,
∀k ∈ N0 ,
3.11
what completes the proof.
3.2. Boundedness and convergence results of the adaptation algorithm
In the following, the boundedness and convergence properties of the adaptation algorithm are
investigated in the subsequent result.
10
Discrete Dynamics in Nature and Society
Theorem 3.2. Assume that a sequence {ηk }∞
satisfying ηk ≥ |ηk |, for all k ∈ N0 , is known that the
0
adaptation algorithm 3.7 is updated by choosing γk ≥ ς0 , and
⎧
⎪
⎨0
σk 2γk ς − 1 − ς1
⎪
⎩
ς
if ek1 ≤ ςηk ,
if ek1 > ςηk ,
3.12
for all k ∈ N0 , for some prefixed real constants ς > 1, ς − 1 > ς0 > 0, and ς1 ∈ ς0 , ς − 1. Then the
following properties hold irrespective of the control law.
1/2
∞
2
2
2
i The sequences {
ak }∞
|ek1 |}∞
0 , {σk /1 γk sk − uk 0 , and {σk /1 γk sk − uk ek1 }0
are bounded and have limits a
∞ < ∞, and zero, respectively.
ii There exist the subsequent limits
lim
k→∞
k
i0
σi ηi2
1 γi si − ui 2
≤ lim
k→∞
≤ lim
k
σi η2i
i0
1 γi si − ui 2
k
2
σi ei1
< ∞,
1 γi si − ui 2
⎛ ⎛ 1/2 ⎞
1/2 ⎞
k
k
σi ηi2
σi η2i
⎠ ≤ lim ⎝
⎠
lim ⎝
2
2
k→∞
k→∞
1 γi si − ui
1 γi si − ui
i0
i0
⎛
1/2 ⎞
2
σi ei1
⎠ < ∞.
≤ lim ⎝
2
k→∞
1 γi si − ui
k→∞
i0
3.13
Proof. Let {Vk }∞
2k . Note, by subtracting a in both sides of 3.7, that
0 be defined by Vk : a
2
ak1 ak σk ϕk ek1 /1 γk ϕk , where ϕk : sk − uk . Since
ak ϕk ηk − ek1 ≤ ςηk − ek1 ,
3.14
from 3.4, for any absolute upper-bound ηk ≥ |ηk |, one gets
ΔVk :
a2k1
−
a2k
2
σk2 ϕ2k ek1
2σk ek1 ηk − ek1 ≤
2 1 γk ϕ2k
1 γk ϕ2k
σk ek1 σk ϕ2k ek1 ek1 − η
.
−
2
k
1 γk ϕ2k
1 γk ϕ2k
3.15
From 3.15, σk 0 ⇒ ΔVk 0. Assume |ek1 | > ςηk so that for any real ς > 1, one gets, from
3.15,
ΔVk ≤
2
σk ek1
1 γk ϕ2k
σk ϕ2k
1 γk ϕ2k
−2 1−ς
−1
2
2σk ς1 ek1
≤− ≤0
ς 1 γk ϕ2k
3.16
M. De La Sen and S. Alonso-Quesada
11
for all k ∈ N0 , provided that γk > 0 and σk satisfies 0 ≤ σk ϕ2k /1γk ϕ2k ≤ σk /γk ≤ 2ς−1−ς1 /ς0
for any real ς1 ∈ ς0 , ς − 1. Then Vk ≤ V0 < ∞, what implies that the sequences {|ΔVk |}∞
ak }∞
0
0 , {
∞
and {
ak }0 , and
σk
2
1 γk sk − uk
1/2
∞
ek1 ,
0
σk
2
1 γk sk − uk
1/2
∞
η k
3.17
0
2
are uniformly bounded and there exist limits limk→∞ |ΔVk | limk→∞ σk ek1
/1 γk sk −
2
uk 0, limk→∞ Vk V∞ ≤ V0 < ∞, limk→∞ ak a
∞ < ∞, and limk→∞ ak a∞ < ∞.
1/2
2
limk→∞ σk ek1
/1 γk sk − uk 2 0 ⇒ limk→∞ σk /1 γk sk − uk 2 |ek1 | 0 so that
1/2
limk→∞ σk /1 γk sk − uk 2 |ηk | 0 since either σk ≥ 2ς0 ς − 1 − ς1 /ς or σk 0, for all
k ∈ N0 , and Property i is proven. Since Vk converges to a finite limit, Property ii follows
from
k
i0
σk η2i
2
1 γk sk − uk ≤
k
i0
2
σk ek1
2
1 γk sk − uk k
|ΔVi | V0 − Vk1 ≤ V0 − V∞ < ∞
3.18
i0
as well as the boundedness of the square of each element of the sequence associate with the
above series.
The boundedness of the estimates and estimation and tracking errors as well as the convergence of the estimates to finite limits are crucial issues to formulate a well-posed problem.
The relative dead zone of the algorithm 3.12 is relevant for adaptive stabilization under external disturbances. The interpretation is direct; if the identification error is small related to the
known upper bound of the disturbances, the estimation is frozen i.e., stopped. The reason
is that the contribution to the identification error of the parameterized part, which is being
updated, may be smaller than that of the disturbance and then to maintain the estimation,
updating may lead to instability. The incorporation of relative adaptation dead zones into the
estimation scheme is a standard mechanism to cope against adaptive instability since the sequence {Vk }∞
0 is bounded, see, for instance, 12, 13, 15. Otherwise, the estimates computations and then the control law are unfeasible. If Assumption 2.1 is satisfied, then a projection
method may be used for the estimates to guarantee that they lie inside its definition domain.
Theorem 3.2 is then extended as follows.
Theorem 3.3. If both the nominal and current intrinsic growth rates satisfy Assumption 2.1, then there
exist real constants εμ ∈ R0 , ε1 > 1, such that
a, ak ∈
1
1
,
,
1 ε1 εμ 1 εμ
∀ k ∈ N0 ,
3.19
and the above adaptation algorithm is replaced with the set of modified recursive equations 3.20–3.22
below as to include projection of the estimates on an admissibility domain.
Adaptation Algorithm 2
It consists of two steps, namely, a priori and a posteriori estimations as follows.
12
Discrete Dynamics in Nature and Society
A priori estimation:
a
0k1
σk sk − uk ek1
a
k1 2 ,
1 γk sk − uk
a
0 ∈ 0, 1, ∀ k ∈ N0 ,
3.20
being updated by choosing γk ≥ ς0 , and
⎧
⎪
⎪
⎨0 σk 2γk ς − 1 − ς1
⎪
⎪
⎩
ς
if ek1 ≤ ςηk0 ,
a
k
0
0
if ek1 > ςηk : ς ηk 1 − 0 a
k sk − uk ,
a
k
3.21
for all k ∈ N0 , for some prefixed real constants ς > 1, ς0 > 0, and ς1 ∈ ς0 , ς − 1.
A posteriori estimation via projection on the interval 1/1 ε1 εμ , 1/1 εμ :
a
k1
⎧
1
⎪
⎪
⎪
⎪ 1 ε1 εμ
⎪
⎪
⎨
0
a
k1
⎪
⎪
⎪
⎪
1
⎪
⎪
⎩
1 εμ
1
,
1
ε1 εμ
1
1
,
∈
,
1 ε1 εμ 1 εμ
1
≥
.
1 εμ
0
if a
k1
≤
0
if a
k1
0
if a
k1
3.22
Then Theorem 3.2(i)-(ii) holds. In addition, similar properties hold by replacing
a
k
ηk −→ ηk0 ηk 1 − 0 a
k0 sk − uk ,
a
k
a
k
ηk −→ ηk0 ηk 1 − 0 a
k0 sk − uk ,
a
k
ek1 A posteriori identification error : sk1 − s
k1 sk1 − a
k sk − uk 3.23
0
0
−→ ek1
A priori identification error : sk1 − s
k1
sk1 − a
k0 sk − uk .
Proof. Define the sequence
0≤
ΔVk0
:
2
0
ak1
−
ak2
≤
σk ek1 σk ϕ2k ek1 1 γk ϕ2k
1 γk ϕ2k
− 2 ek1 − ηk0
≤0
3.24
from 3.20-3.21 using a close development to that in Theorem 3.2 so that it is monotonically
decreasing
ΔVk :
2
ak1
−
ak2
2
ak1
−
2
0
ak1
2 0 2 a
k1
0
− ΔVk ≤ − 1 −
ak1 − ΔVk0 ≤ 0
0
a
k1
3.25
0
ak1
≤ 1, for all k ∈ N0 , from the projection part 3.22 of the
for all k ∈ N0 since 0 < a
k1 /
∞
estimation algorithm. Then {Vk }∞
0 is bounded and converges to a finite limit, and {ΔVk }0
0
0
is also bounded and converges to zero. Also |ΔVk | 1 − a
k1 /
ak1 < 1 for all k ∈ N0 , and
M. De La Sen and S. Alonso-Quesada
13
2
0
0
|ΔVk0 | 1− a
k1 /
ak1
< 1. Since ΔVk0 : ak1
− ak2 0, for all k ∈ N0 , then there exists a finite
2
0
ak1
− ak2 converges to a finite limit and |
ak0 | converges
limit limk→∞ ki0 |ΔVi0 | < ∞, then since |
ak | converges since Vk converges to finite limits as k → ∞. Thus Theorem 3.2i-ii
follows. On the other hand, note that
ek1 A posteriori identification error : sk1 − s
k1 ηk − ak sk − uk
0
a
0k − a
k sk − uk ηk0 − ak0 sk − uk ,
ek1
0
0
A priori identification error : sk1 − s
k1
ηk − ak0 sk − uk
ek1
a
k 0
0
0
ek1 a
k − a
k sk − uk ηk 1 − 0 2
ak − a sk − uk .
a
k
3.26
2
Since the normalized sequences {σk /1 γk ϕ2k |ek1 |}∞
ηk0 }∞
0 and {σk /1 γk ϕk 0 are
bounded, it follows that the reported replacements may be performed leading to Theorem
3.3iii.
1/2
1/2
3.3. Some practical design constraints
The tracking error of the solutions of the IBHE and the reference IBHE are given by the set of
equivalent expressions:
εk1 s∗k1 − sk1 s∗k1 − s
k1 − ek1 s∗k1 − s
k1 ak sk − uk − ηk .
3.27
The solution of the IBHE is equivalently calculated either as a function of the nominal parameters a and b 1 − a or as a function of their estimates as follows, by considering the adaptive
control law 3.8:
sk1 a sk − uk uk ηk s
k1 ek1 a
k sk − uk uk ηk − ak sk − uk
s
k1 ek1 a
k sk − uk uk ηk − ak sk − uk
a
k sk 1 − a∗k rk a∗k − a
k sk ek1
a∗k sk 1 − a∗k rk ek1 .
3.28a
3.28b
3.28c
3.28d
It is important to discuss when the adaptive control law has no division by zero with the property being numerically robust. This translates, in practice, to a
k /
1 being sufficiently deviated
from unity and {sk }∞
0 with all its elements positive and sufficiently deviated from zero. This
guarantees that the BHE does not diverge when driven by an appropriate nonzero finitely
upper-bounded environment carrying capacity. More formally, a reasonable assumption for
practical design purposes is to extend the assumption of Theorem 3.3 to also consider the same
admissibility range referred to for the reference intrinsic growth-rate inverse and the estimated
intrinsic growth rate.
14
Discrete Dynamics in Nature and Society
Assumption 3.4. a, ak , a
k , a∗k ∈ 1/1 ε1 εμ , 1/1 εμ , for all k ∈ N0 , and some prefixed real
constants εμ > 0 and ε1 > 1. A direct calculation with Assumption 3.4 yields
ε1 ε μ
εμ
1
1
1
,
,1 ⊂ 0, 1,
∈ 1
,
1 εμ 1 ε1 εμ
ε1 εμ
εμ
1 − a
k
∗
ε μ ε1 − 1
a − a
k ≤ ,
k
1 ε1 ε μ 1 εμ
ε1 − 1 ε μ
ε1 − 1 ε μ
∗
ak − a
k ≤ − , ,
1 ε1 ε μ 1 εμ
1 ε 1 ε μ 1 εμ
1 − a
k ∈
3.29
while similar expressions follow for replacements involving any two elements of the quadruplet a, ak , a
k , a∗k as follows:
1 εμ
ε1 − 1
1
ε1 r k sk ≥ uk 1 − a∗k rk a
k − a∗k sk
1 ε1 εμ
1 εμ
1 − a
k
1 εμ
1 εμ
1
1
1
ε1 r k −
ε1 r k − s k ≥
sk sk ≥
sk .
1 ε1 εμ
1 εμ
1 εμ
1 ε1 εμ
1 εμ
3.30
The above expressions 3.29-3.30 lead to the following result referring to explicit positive
k −1 so that u−1 K ∗ K
k K ∗ r −1 since
lower and upper bounds of uk Kk−1 Kk∗ K
k
k
k
k
rk Kk∗ −1 .
Proposition 3.5. Assume sk < ε1 1 εμ /ε1 − 1Kk∗ , for all k ∈ N0 . Then the following constraints
hold:
1 εμ
1 εμ
1
,
≤u ≤ ∗ −1 ∗ −1
k
ε 1 1 ε μ Kk
ε1 − 1 s k
ε1 1 εμ
− sk sk
Kk
1 εμ
1 εμ
∗
∗
k ≤ − Kk ≤ K
− Kk .
∗ −1 ∗ −1 ε1 1 εμ Kk
ε1 − 1 s k
ε1 1 εμ Kk
− ε1 − 1 s k
3.31
3.32
Proof. It follows directly from 3.29-3.30. The necessary condition sk < ε1 1 εμ /ε1 − 1Kk∗
k,
is needed to keep ε1 1 εμ Kk∗ −1 − ε1 − 1sk > 0 in the right-hand-side upper bound of K
for all k ∈ N0 in 3.32.
3.4. Closed-loop stability
The boundedness and convergence properties of the parameter estimates have been proven.
In the following, the closed-loop stability is proven under a condition of slow growing of the
disturbances with respect to the solution of the IBHE if such a disturbance is unknown. In
particular, it is assumed that ηk OMax0≤i≤k si with known constants of the related linear
upper bound and with sufficiently slow growth of ηk with respect to Max0≤i≤k si . This is a
reasonable assumption used in the background literature since a complete lack of knowledge
of disturbances makes impossible the stabilization in the general case see, e.g., 12, 13, 15 and
references therein.
M. De La Sen and S. Alonso-Quesada
15
Assumption 3.6. There exist known finite nonnegative real constants λ1,2 such that
ηk ≤ λ1 λ2 Maxsi .
3.33
0≤i≤k
Then, from 3.28b, 3.31-3.32, and Assumptions 3.6–3.4, one gets
sk1 a
k sk − uk uk ek1 .
3.34
The following results are preparatory for the stability theorem to be stated later on. They basically establish that the absolute value of the identification error grows not faster than linearly
with the upper-bounding sequence {ηk }∞
of the additive disturbances.
0
Assertion 3.7. If the Adaptation Algorithm 1 is used, then |ek1 | ≤ ς1 ηk ς2 , for all k ∈ N0 , for
some real constants ς1 ≥ ς ∈ R and ς2 ∈ R0 .
Proof. If |ek1 | ≤ ςηk , the assertion is true with ς1 ς ∈ R and ς2 0. If |ek1 | > ς ηk , then, from
Theorem 3.2, i 0 < |ek1 | − ςηk /1 γk sk − uk 2 1/2
≤ M < ∞, for all k ∈ N0 . Thus
|ek1 | ≤ ςηk M1 γ k |sk − uk | ≤ ς M γηk M γ|uk | M
3.35
and the assertion follows with
ς1 ς M γ,
ς2 M1 γ Max |uk | < ∞
3.36
0≤k<∞
since Min0≤k<∞ Kk > 0.
Assertion 3.8. If the Adaptation Algorithm 2 is used and Assumption 3.4 holds, then |ek1 | ≤
ς1 ηk ς2 , for all k ∈ N0 , with
2 ε1 − 1 εμ
ς1 1 ,
1 ε 1 ε μ 1 εμ
ς2 Max ai Max ui .
0≤i<∞
0≤i<∞
3.37
Proof. It follows from Assumption 3.4, 3.4 and 3.29, and the fact that {Kk }∞
0 is positively
lower bounded, which yield directly
|ek1 | ≤ |
ak sk − uk | ηk
≤ 1 Max |
ai |Max |ui | ≤ ς1 ηk ς2 ,
ai | ηk Max |
0≤i<∞
0≤i<∞
0≤i<∞
∀k ∈ N0 .
3.38
From Assertions 2.3 and 3.7, for the Adaptation Algorithms 1 and 2, respectively,
Assumption 3.6 and 3.28c,
sk1 ≤ a∗k sk 1 − a∗k rk ς1 ηk ς2
1 − ρk
k
≤ ρ s0 ς1 λ1 Max sk ρ1 ρ2 ς1 λ2 ς2
3.39
1−ρ
0≤i≤k1
≤
1 ς1 λ1
Max sk ρ1 ρ2 ς1 λ2 ς2 s0 ,
1 − ρ 0≤i≤k1
1−ρ
∀k ∈ N0 ,
16
Discrete Dynamics in Nature and Society
for any s0 > 0 and some positive finite constants ρ, ρ1 , and ρ2 satisfying 1 > ρ ≥ Max0≤k<∞ a∗k ,
ρ1 ≤ 1 − Min0≤k<∞ a∗k < 1, and ρ2 ≥ Max0≤k<∞ rj . The last two inequalities of 3.39 follow
i
k
directly by proceeding recursively with the preceding one by using k−1
i0 ρ 1 − ρ /1 − ρ ≤
1/1 − ρ since ρ ∈ 0, 1. It is obvious that, for each k ∈ N0 , it exists a unique k k ∈ N0 ,
dependent in general on k, such that k k ≤ k such that sk Max0≤j≤k sj Max0≤j≤k sj and
there is no other j ∈ N0 such that k ≥ j > k k, where the same maximum is reached. A precise
definition is
k k : Arg j ∈ N0 : 0 ≤ j ≤ k ∧ sk Max
sj Maxsj ,
0≤j≤k
0≤j≤k k
3.40
¬∃jk k < j ≤ k ∈ N0 : sj Maxsj 0≤j≤k
with “∧” and “¬” being the conjunction and negation logic symbols. The substitution of 3.40
into 3.39 yields
Maxsj ≤ 1 − ϑ−1 C < ∞,
0≤j≤k
∀k ∈ N0 ,
3.41
provided that ς1 λ1 /1 − ρ < 1, which holds if and only if 0 ≤ λ1 < 1 − ρ/ς1 i.e., if Assumption
3.6 holds with sufficiently small λ1 , where
ϑ :
ς1 λ1
1−ρ
C :
1 ρ1 ρ2 ς1 λ2 ς2 s0
1−ρ
3.42
with C being a finite positive real, which depends on the initial conditions of the IBHE and
thus on the initial conditions of the BHE on the available upper bound of the additive disturbances, on the reference, and on the free-design parameters of the adaptation algorithm, γk ,
ς > 1, ξ0 , ξ1 , and so on. The above result also holds for the Adaptation Algorithm 2 with specific
constants redefined by
ρ :
1
< 1,
1 εμ
ρ1 :
ρ2 : ε1 1 εμ Max
0≤k<∞
ε1 εμ
,
1 ε1 εμ
−1
Kk∗
ρ1 :
ε 1 εμ
ρ1
,
1 ε1 εμ 1 ε1 εμ 2
3.43
< ∞,
and ξ1,2 defined in Assertion 2.3 for the Adaptation Algorithm 1 and in Assertion 3.7 for the
Adaptation Algorithm 2. The boundedness of the solution of the IBHE for finite initial conditions implies that of the additive disturbances via Assumption 3.6, that of the identification
error via Assertions 2.3–3.7, and that of the tracking error since the solutions of the current
and the reference one are both bounded. The estimated parameters and the estimated solution
are bounded from Theorems 3.2 and 3.3. Those conclusions are now summarized in the result
below.
Theorem 3.9 closed-loop stability. If Assumption 3.6 holds with sufficiently small coefficient λ1 ,
then all the signals in the closed-loop system remain bounded for all time so that the IBHE (and then the
associate BHE) is globally stable if any of the Adaptation Algorithms 1 or 2 is used.
M. De La Sen and S. Alonso-Quesada
17
Remark 3.10. Theorem 3.9 becomes stronger than formerly stated in the absence of additive
disturbances i.e., ηk ≡ 0 since asymptotic perfect tracking is furthermore achieved. Another
result is that the identification error converges asymptotically to zero if the relative dead zone
of the adaptation algorithms is removed, that is, the {σk }∞
0 is not zeroed at any sample as
a result of a comparison procedure of the identification error and the additive disturbances.
These results follow directly from Theorems 3.2 and 3.3 and 3.39. Note that the results may
be directly generalized to the extension of using relative dead zones for adaptive algorithms
by incorporating the estimation of the constants λ1,2 characterizing {ηk }∞
, provided they are
0
unknown 16.
Remark 3.11. The closeness between the IBHE and that of its reference model has been considered for feasibility reasons since, in many ecological problems, where such models are commonly of interest, the environment characteristics, which directly influence the value of the
environment carrying capacity, cannot be abruptly modified even in closed environments. The
employed philosophy about relative dead-zone adaptation seems to be promising to be also
applied to other ecological controlled problems involving, for instance, Kolmogorov-type ecological models or models for a biochemical aquariums 17, 18. The obtained results seem to be
promising for mathematical modeling and the use of adaptive control in other kinds of problems related to biology and ecology see, e.g., 20–22 and to extend the research to governing
extinction conditions 10.
4. Numerical examples
∗ ∞
Example 4.1. The objective is that the BHE solution {xk }∞
0 tracks a reference sequence {xk }0 by
synthesizing a control system in order that IBHE matches a reference model. Such a reference
model is another IBHE defined by the appropriated sequences {μ∗k }∞
and {Kk∗ }∞
to generate
0
0
∗ ∞
∗ ∞
the sequence {sk }0 associated to the desired {xk }0 to be tracked by the BHE solution. The reference values are μ∗k 1.55, and Kk∗ 170, for all k ∈ N0 , are used for the reference model and
BHE, respectively, with the period T 1 one year. It is assumed that small local variations of
the carrying capacity of the habitat are allowed. The evolution data of the population of cod in
the North Atlantic Sea in the period 1952–1992 are given in 4, and exhibit a quasiperiodic behavior of the intrinsic growth rate. Based on these data, the intrinsic growth rate is modeled as
a sinusoid defined by μk 2.3 0.15 sinKT/100, which adjusts closely to those experimental
data. The average value of Kk is 200, what is used as a fixed uncontrolled carrying capacity
for the whole set of data. The initial population of the cod is x0 500 being identical to the
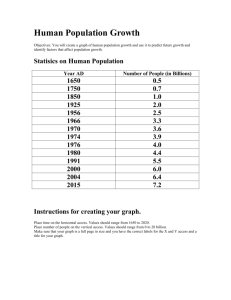
reference value. Figure 1 displays the population of cod if the BHE is controlled and if it is not
controlled.
The population of the controlled BHE tracks perfectly the reference sequence as in the
transient as in the stationary regime for all time since the true parameterization of the BHE is
known, and then the control law is not adaptive. Note, however, the uncontrolled BHE does not
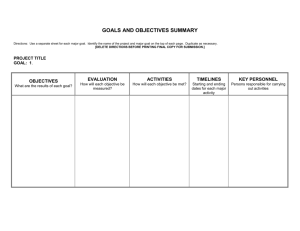
track the reference. Figure 2 displays the controlled carrying-capacity sequence, which leads to
a perfect tracking of the reference.
Example 4.2. A numerical adaptive example is now discussed. It is assumed that the environment carrying capacity of the reference model-environment carrying capacity is a constant
value of 200, and the reference intrinsic growth rate is constant of value 2. The objective is
to design the environment carrying-capacity sequence via estimation and feedback so that
18
Discrete Dynamics in Nature and Society
500
450
400
350
300
250
200
150
0
10
20
30
Samples
40
50
xk with control
x∗ k
xk without control
Figure 1: Evolution of the population of cod from x0 500.
230
220
Kk
210
200
190
180
170
160
0
10
20
30
Samples
40
50
Figure 2: Evolution of the control sequence for the solution of Figure 1.
asymptotic tracking of the reference solution is achieved with positive solutions. It is assumed
that no unmodeled dynamics or parametrical uncertainties are present so that a standard recursive least-squares algorithm is used for parametrical estimation of the intrinsic growth rate
whose initial value is chosen and the initial value of the time-decreasing covariance gain is
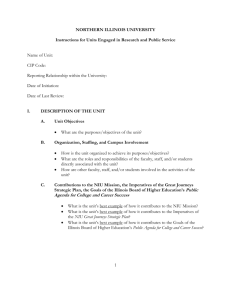
fixed to 1000. Figure 3 displays the reference BHE, the uncontrolled BHE, and the controlled
one. It is seen that the reference BHE is asymptotically tracked, while the uncontrolled one differs from the reference. The carrying capacity of the unknown uncontrolled BHE varies from
180 to 220 according to the shape of Figure 4, and its intrinsic growth rate is constant, equal to
1.6. The carrying capacity exerting the control action is also displayed on Figure 4 with maximum and minimum admissible values being constrained by the adaptive controller to 280 and
200, respectively.
M. De La Sen and S. Alonso-Quesada
19
Trajectory reference solution
Uncontrolled trajectory solution
200
200
150
150
100
100
50
50
10
20
30
Samples
40
50
10
20
30
Samples
a
40
50
b
Controlled trajectory solution
200
150
100
50
10
20
30
Samples
40
50
c
Figure 3: BHE Solutions: a reference, b uncontrolled, and c controlled for initial covariance gain 1000.
Uncontrolled carrying capacity
Controlled carrying capacity
220
280
210
260
200
240
190
220
10
20
30
Samples
a
40
50
10
20
30
Samples
40
50
b
Figure 4: Environment carrying capacities: a uncontrolled BHE and b controlled.
5. Conclusions
This paper has considered the well-known BHE used in ecology within a control problem
context where the control action on the linear IBHE is the inverse of the carrying capacity.
An extended version of the standard BHE has been considered by incorporating additive
20
Discrete Dynamics in Nature and Society
disturbances. The overall control problem is firstly stated on the IBHE by taking advantage of
its linear nature. This point of view is very feasible in close or semi-open environments where
humidity, temperature, and other factors of the environment may be selected within certain
margins. A reference is also defined, which describes the suited behavior for the system, the
control action having an objective that the solution of the current BHE is able to perfectly track
that of the reference a. For feasibility purposes, the overall problem is stated in terms of a
local variation of the inverse carrying capacity to perform the control action on the IBHE so
that the reference a is fully tracked. This implicitly means that, in practice, the current parameters of the BHE and then those of the IBHE are locally deviated from those of its reference
model. Then the method has been extended by incorporating an adaptive version for the case
when the BHE parameterization is partly or fully unknown. The use of a relative adaptation
dead zone freezes the adaptation when the identification error is sufficiently small according
to an available absolute upper bound of the disturbances sequence so that the algorithm is
proven to prevent potential instability caused by the presence of such additive disturbances.
The second one incorporates to the estimation dead zone and estimates projection procedure
by using a priori knowledge on the parameters of the BHE and the second algorithm, which
have been presented. It has been proven that both adaptation algorithms and associate control
law stabilize the current, provided that the absolute value of the additive disturbances grows
not faster than linearly with the maximum of the solution with a sufficiently small slope. Some
related numerical examples have been discussed to corroborate the theoretical results. The potential generalization to the general case, where the parameterizations of the current BHE and
its reference one to be tracked are not close to each other, is direct although it may be not feasible in some practical cases, since the adaptation algorithms and the main stability results are
formulated in a general way.
Acknowledgments
The authors are very grateful to the Spanish Ministry of Education for its partial support of
this work through Project DPI 2006-00174. They are also grateful to the referees for their useful
comments.
References
1 N. J. Barrowman, R. A. Myers, R. Hilborn, D. G. Kehler, and C. A. Field, “The variability among
populations of coho salmon in the maximum productive rate and depensation,” Ecological Applications,
vol. 13, no. 3, pp. 784–793, 2003.
2 A. L. Jensen, “Harvest reference points for the Beverton and Holt dynamic pool model,” Fisheries
Research, vol. 47, no. 1, pp. 93–96, 2000.
3 M. Holden, “Beverton and Holt revisited,” Fisheries Research, vol. 24, no. 1, pp. 3–8, 1995.
4 G. Stefansson, “Fish 480 stockrec spawning stock, recruitment and production,” Course at the Department of Biology of the University of Iceland using data of the Marine Research Institute of Reykjavik, Iceland, November 2005.
5 R. J. H. Beverton and S. J. Holt, “On the dynamics of exploited fish populations,” Fisheries Investment,
vol. 19, p. 1, 1957.
6 C. Hui, “Carrying capacity, population equilibrium, and environment’s maximal load,” Ecological
Modelling, vol. 192, no. 1–2, pp. 317–320, 2006.
7 M. A. McCarthy, “The Allee effect, finding mates and theoretical models,” Ecological Modelling,
vol. 103, no. 1, pp. 99–102, 1997.
M. De La Sen and S. Alonso-Quesada
21
8 M. De la Sen, “Parameter dependent Lyapunov functions for robust stability of time-varying linear
systems under point delays,” Applied Mathematics and Computation, vol. 179, no. 2, pp. 612–621, 2006.
9 S. Stević, “A short proof of the Cushing-Henson conjecture,” Discrete Dynamics in Nature and Society,
vol. 2006, Article ID 37264, 5 pages, 2006.
10 M. De la Sen, “The environment carrying capacity is not independent of the intrinsic growth rate
for subcritical spawning stock biomass in the Beverton-Holt equation,” Ecological Modelling, vol. 204,
no. 1-2, pp. 272–273, 2007.
11 M. De la Sen, “On impulsive time-varying systems with unbounded time-varying point delays: stability and compactness of the relevant operators mapping the input space into the state and output
spaces,” The Rocky Mountain Journal of Mathematics, vol. 37, no. 1, pp. 79–129, 2007.
12 M. De La Sen and S. Alonso, “Adaptive control of time-invariant systems with discrete delays subject
to multiestimation,” Discrete Dynamics in Nature and Society, vol. 2006, Article ID 41973, 27 pages, 2006.
13 S. Alonso-Quesada and M. De la Sen, “Robust adaptive control of discrete nominally stabilizable
plants,” Applied Mathematics and Computation, vol. 150, no. 2, pp. 555–583, 2004.
14 M. De la Sen and N. Luo, “On the uniform exponential stability of a wide class of linear time-delay
systems,” Journal of Mathematical Analysis and Applications, vol. 289, no. 2, pp. 456–476, 2004.
15 M. De la Sen, “Robust stable pole-placement adaptive control of linear systems with multiestimation,”
Applied Mathematics and Computation, vol. 172, no. 2, pp. 1145–1174, 2006.
16 G. Feng, “Analysis of a new algorithm for continuous-time robust adaptive control,” IEEE Transactions
on Automatic Control, vol. 44, no. 9, pp. 1764–1768, 1999.
17 Z. Huang, S. Chen, and Y. Xia, “Incorporate intelligence into an ecological system: an adaptive fuzzy
control approach,” Applied Mathematics and Computation, vol. 177, no. 1, pp. 243–250, 2006.
18 R. Fazio and A. Jannelli, “Mathematical and numerical modeling for a bio-chemical aquarium,” Applied Mathematics and Computation, vol. 174, no. 2, pp. 1370–1383, 2006.
19 F. Chen and C. Shi, “Global attractivity in an almost periodic multi-species nonlinear ecological
model,” Applied Mathematics and Computation, vol. 180, no. 1, pp. 376–392, 2006.
20 X. Ding and H. Su, “Dynamics of a discretization physiological control system,” Discrete Dynamics in
Nature and Society, vol. 2007, Article ID 51406, 16 pages, 2007.
21 N. Hritonenko, A. Rodkina, and Y. Yatsenko, “Stability analysis of stochastic Ricker population
model,” Discrete Dynamics in Nature and Society, vol. 2006, Article ID 64590, 13 pages, 2006.
22 N. Kamel, A. Mousavi, and A. Samraj, “Whitening of background brain activity via parametric modeling,” Discrete Dynamics in Nature and Society, vol. 2007, Article ID 48720, 11 pages, 2007.