SPACECRAFT TRAJECTORY TARGETING BY BOUNDARY-CONDITION ORBIT FITTING by
advertisement

SPACECRAFT TRAJECTORY TARGETING
BY BOUNDARY-CONDITION ORBIT FITTING
by
DALE GORDON STUART
S.B., Massachusetts Institute of Technology
(1982)
SUBMITTED IN PARTIAL FULFILLMENT
OF THE REOUIREMENTS FOR THE
DEGREE OF
MASTER OF SCIENCE
IN AERONAUTICS AND ASTRONAUTICS
at the
MASSACHUSETTS INSTITUTE OF TECHNOLOGY
June 1984
@
Dale G. Stuart
The author hereby grants to M.I.T. permission to reproduce and to
distribute copies of this thesis document in whole or in part.
Signature of Author
Department of Aeronautics and Astronautics
June 4, 1984
Certified by
Prof. David L. Akin
Thesis Supervisor
Accepted by
?rof. Harold Y. Wachman
Chairman, Departmencai Graduate Commictee
SPACECRAFT TRAJECTORY TARGETING
BY BOUNDARY-CONDITION ORBIT FITTING
by
DALE GORDON STUART
Submitted to the Department
on May
11,
of Aeronautics and Astronautics
1984 in partial
requirements
fulfillment of
for the degree Master of
the
Science
in
Aeronautics and Astronautics
ABSTRACT
The
finding
classic
orbital
feasible
fixed
extends
the
nation
to
three
of
apogee
at
for
powered
flight,
use
a
and
into
chronous
Earth Orbit
Results
Low
provides a
initial
a
between
values
the
Orbit
choice
of
any combialtitude,
the
are
The
the
a
transfer orbit
targeting
for
computer
studied:
and
a
be
actual
very
achieved,
and
spacecraft
simulation
in
of space-
launch from
the
from LEO
indicate
that
of
technique
target
to optimal
targeting
generating
a
satisfies
is
with typically
desired
close
that
earth's
to Geosyn-
a
easy
difficulties,
to
for
values,
a
large
technique
feasible
chosen
extremely good
less
than 0.001
and
(in
some
a
implement,
contains
and can be applied
David L.
(75063i7
close
target
no
to a wide
Akin
Professor of
Aeronautics and Astronautics
cases.
fast and
cases
combination of
%
resulting
number of
provides
two-body space flight navigation problems.
Thesis Supervisor:
has its
technique is
transfer
computer simulations
can
means
computational
are
attention is
(GEO).
orbit-fitting
trajectory
Special
algorithm
(LEO),
and a
developed that
target velocity, altitude, and
guidance
in
is
parameters:
In addition, the
implemented
means of
position
method
target
case where
Two cases
from the
straightforward
major
a
allows
four
choice of
the
general
Earth
targeting accuracy
ditions.
to
is
trajectories.
optimal)
and
following
and
as
surface
Overall,
an
thesis,
problem
the
the target altitude.
adapted
delta-v
through
this
the algorithm allowing
path angle,
error
pass
In
problem
angle, velocity, and flight path angle.
flight
craft
that
position.
boundary-value
of
downrange
paid
orbits
target
boundary-value
to
con-
inherent
range of
ACKNOWLEDGMENTS
.Special thanks to Professor Dave Akin, for being my thesis
supervisor," for keeping me on target, and for knowing how to keep me
encouraged despite his being the busiest person I know. Thanks also to
Professor Battin, who provided inspiration and valuable tips when I
most needed them, and whose courses taught me -- always one month too
late, however -- how I could have done everything much more easily.
An education at M.I.T. is not provided by the professors alone,
and I wish to thank all my fellow friends in the Space Systems Lab -that's you Mary, Sarah, Janice, Russ, John, Cliff, George, Dan, Ray,
Janet, Joe, and too many more to mention -- for reminding me there's a
lighter side to M.I.T., for sharing my enthusiasm for space exploration, and for not letting me get hopelessly submerged in work, although
I hope you'll forgive me for "always bein-g so organized!"
And, of
course, to one of the most valuable people in the Aero/Astro department, Susie Fennelly, who knows everything you always wanted to know
about surviving The System, many thanks for helping me throughout these
years.
My sincere thanks
considered me lost in
and encouragement all
thank my husband, Dave,
to my parents and sisters, who may have long ago
space, but who never ceased providing me support
my life.
Last, but not at all least, I deeply
to whom I owe more than words can tell.
This work was supported by fellowships from the Fannie and John Hertz
Foundation, and from Zonta International.
TABLE OF CONTENTS
PAGE
ABSTRACT ................................................
ACKNOWLEDGEMENTS
LIST OF SYMBOLS
.......................
........ 2
.......................................
..............................
3
..........................
6
LIST OF FIGURES AND TABLES ..........................................
CHAPTER I
Introduction ..............................
9
...............
10
CHAPTER 2 Development of the Orbit-Fi tting Targeting Technique
2.1
Orbital Boundary-Value Problem .............................. 12
2.2
Solution Technique for Any Choi ce of Target Parameters ...... 15
2.3
Altitude, Velocity, and Flight Path Angle as Target
Parameters .............................
............. ...18
2.4
Finding the Required Velocity ............
............ . ...19
2.5
Specialization for Target Point at Apogee
............... 25
2.6
Range of Feasible Velocities .............
................ 27
CHAPTER 3
Guidance Algorithm
3.1
Overview ... .... ........................................... 29
3.2
Velocity-to-be-Gained Determination ...........................30
3.3
Thrust Angle Determination ................................... 31
3.4
Thrust Level Determination .................................... 32
3.5
Guidance for Infeasible Target Velocities ....................34
CHAPTER 4
Technique Applications and Results
4.1
Overview ............... ........
.....................................
37
4.2
Simulation Technique ......................................... 38
4.3
Orbit-to-Orbit Transfer Trajectories ........................ 39
4.4
Launch Trajectories ........................................ 47
CHAPTER 5
Conclusions
.............................................
APPENDIX A
Alternative Choices of Target Parameters
A.1
Altitude, Velocity, and Transfer Angle as Target
Parameters .... .....................................
A.2
Velocity, Flight Path Angle, and Transfer Angle as Target
Parameters ..........................................................
A.3
Altitude, Flight Path Angle, and Transfer Angle as Target
?arameters .....
............
.....
...........................
53
.54
56
37
TABLE OF CONTENTS
(cont.)
APPENDIX B
PAGE
Alternative Technique for Finding the Required
Velocity ......
.................. ......... .......... 58
APPENDIX C
Spacecraft Equations of Motion ............................ 60
APPENDIX D
Tangential Thrust Transfers
....
......
........
......... 63
Sample Trajectories
LEO to GEO Transfer ......... .........
....... ................ 65
Earth Launch to LEO ............................................... 70
APPENDIX E
E.1
E.2
APPENDIX F
Computer Program Listing ....... ..
LIST OF REFERENCES
..... .. .... .....
.... 72
................................................. 91
LIST OF SYMBOLS
Variables in parentheses are the variable names used in the computer
program.
A -
perpendicular distance from V
a -
semi-major axis of an elliptical orbit
a -
coefficient of a term in a polynomial
to the radius
-
coefficient of a term in a polynomial
a2 -
coefficient of a term in a polynomial
a
a
-
maximum feasible semi-major axis
ain -
minimum feasible semi-maior axis
-
normal component of acceleration
min
a
(SMA)
(Amax)
B -
perpendicular distance from V 2 to the chord
b -
coefficient of a term in a polynomial
C -
chord
c -
exhaust velocity
c -
coefficient of a term in a polynomial
D -
drag
e -
eccentricity of an elliptical orbit
c -
(c)
(Drag)
circumferential component of force
-
F
(chord)
radial component of force
g -
gravitational acceleration
h -
angular momentum of an orbit
I
-
sp
(g)
specific impulse
L -
lift
m -
vehicle mass
m. -
vehicle mass at start of time interval k
M
(Lift)
final mass
(Mk)
LIST OF SYMBOLS
M
o
Pi
-
initial mass
-
initial point
(cont.)
(MO)
P2 -
target point
p -
parameter of an elliptical orbit
r
radius
-
(Rk)
rI
-
initial radius
r2
-
target radius
(R2)
ra -
apogee radius
of an
-
rGE O
-
r
p
elliptical
orbit
GEO.orbital radius
perigee radius
-
T
(RO)
thrust
of an elliptical
orbit
(Thrust)
V -
vehicle velocity
VI -
vehicle's
(Vk)
current velocity
velocity
(Vk)
(V2)
V2 -
arget
V2c -
chordal
Vmax
maximum feasible target velocity
V2min -
minimum feasible target velocity
V2p -
radial component of V
2
V2t -
a temporarily assigned target velocity
a -
apogee velocity of an elliptical orbit
-
chordal velocityv component of V 2 and V
V
c
-
V
VG
V
a velocity component
-
GEO
component of V 2
velocity-to-be-gained
-
GEO orbital velocitv
(VCR)
(VG)
(V2Max)
req
(VC)
LIST OF SYMBOLS (cont.)
V
LEO
LEO orbital velocity
V
radial velocity component of V 2 and V re
p
V
-
r
V
rc
radial component of vehicle velocity
-
chordal component of V
radial component of V
V
a velocity component
(VRR)
a velocity component
(VSig)
-
-
V
(Vrk)
req
V
rp
rr
(VP)
req
a substitute variable
thrust angle, angle between V I and V G
angle between extension of V 1 and V G
1
angle between Vc and V 2
O-0*
8-
(alpha)
(beta)
(gamma)
angle between chord and
r2
angle between Vc and V
at target point
angle between V 2 and extension of the radius
angle between V
a '- -
req
and local horizontal
gravitational constant of
0-
(theta)
the central body
transfer angle between r. and r 2
(Mu)
(sigma2)
downrange angle between launch site and vehicle position
(sigma)
vehicle's
flight path angle
(Phk)
target flight path angle
02 -
delta-v required for orbit circularization
iV
t
V total
-
delta-v required during initial thrusting phase (DeltaV)
delta-v required for the entire mission
angular compoonent of vehicle velocity
(Vomk)
LIST OF FIGURES ANDTABLES
FIGURE
PAGE
2-1
Geometry. of the Orbital Boundary-Value Problem ..
2-2
Hyperbolic Velocity Loci at P
2-3
Detail of Geometry at P
2-4
Geometry of Velocity Components at P1
and P
3-1
Velocity-to-be-Gained Determination
4-1
Sample LEO to GEO Transfer Trajectory ............
..
....13
and P
.... ..17
...... 21
....
.............
4-2a Thrust, Thrust Angle vs Time -- LEO to GEO Transf
4-2b Altitude vs Time --
LEO to GEO Transfer .........
4-2c Velocity vs Time --
LEO to GEO Transfer
o
....
....... 31
....... 41
....... 43
rrer
o
.o
er
.........
....... 43
....... 44
4-2d Flight Path Angle vs Time -- LEO to GEO Transfer
ree
....... 44
4-3
Partial LEO to GEO Transfer Trajectory ..........
roe
....... 46
4-4
Sample Launch Trajectory .......................
r
4-5a Thrust, Thrust Angle vs Time -- Launch to LEO
... ....r~rr....
,r
....... 48
....... 49
....
4-5b Altitude vs Time --
Launch to LEO ...............
....... 49
4-5c Velocity vs Time --
Launch to LEO .............
....... 50
4-5d Flight Path Angle vs Time -- Launch to LEO
TABLE
4-1
LV
.................... 50
PAGE
Comparisons for LEO to GEO Transfer
........................47
CHAPTER
1
Introduction
Since
Shuttle
the Apollo
program,
have
era,
and especially with the advent of
guidance
flourished.
techniques
for spacecraft
in
the Space
powered flight
Elaboraee algorithms exist that find an optimum tra-
jectory
for
given
mission,
and
these
target conditions,
algorithms
sophisticated spacecraft.
perform
It
and for a given spaceflight
the task very well
for today's
is of course necessary to use an exact,
optimal guidance technique with an actual vehicle, but the requirements
for
exactness
and optimality
are precisely
what lead to the enormous
complexity of these algorithms.
When a
real
vehicle
is
not
involved,
and such precise accuracy
or
optimality is not required, the currently available guidance techniques
--
such as those based on Pontryagin's maximum principal, Bellman's dy-
namic
more
programming,
or Raleigh-Ritz
type procedures
elaborate and detailed than necessary.
studies,
can end up being
Especially early in design
when a vehicle can be modelled by a small set of parameters,
and a quick, easy method
algorithms
based on these
for finding a feasible trajectory is needed,
optimal
control
theories are
and time-consuming
to implement.
rithm is
around one specified set of
position,
--
developed
velocity,
transfer angle,
In
addition,
and flight
zannoc be used for anv other zombinacion of
too cumbersome
each particular
target
parameters
path angle,
:ese paramecers.
algoamong
and usually
No technique exists,
optimum,
however,
that is
easy to implement,
and works for more than one combination of target parameters,
or for more than a limited type of spaceflight missions.
classic
calculus-of-variations-derived
simplest form, works
tightly
more versatile, it
linear tangent algorithm,
very realistic --
spacecraft
the requirement
that
guidance techniques
conditions are satisfied.
so
1)
can be filled by reand by
mechanics to ensure that the target
A means already exists, known as the orbital
boundary-value problem, for finding an orbit that passes
initial point and a selected target point,
through a
thus providing a
technique for guiding a vehicle to a desired target position.
boundary-value problem,
its
(See Space
the trajectory be exactly optimum,
using basic methods from orbital
given
in
and when made
too becomes complex and cumbersome.
Shuttle Ascent, Guidance, Navigation, and Control, ref.
This gap in
Even the
for only a very narrow range of problems --
constrained that they aren't
laxing
close to
however,
The
allows only a.limited choice of target
parameters, with the restriction that the target be a fixed position in
space.
The
intent of this
thesis,
therefore,
is
to extend the basic
boundary-value technique to allow multiple choices of target parameters,
including
space missions.
choices
better suited to the requirements
for current
The technique can thus be adapted for use in a wide
variety of two-dimensional
spaceflight
targeting problems,
ranging from
planetary launch trajectories to orbital insertion and orbit-to-orbit
transfers, as well as interplanetary missions, and most two-body targeting problems
in general.
CHAPTER 2
Development of the Orbit-Fitting Targeting Techniaue
2.1
The Orbital Boundary-Value Problem
The starting point
the classic
two-point orbital
formulation is:
tion
for the technique developed in this thesis is
measured
boundary-value problem.
The problem
given an initial position and a desired target posi-
from a
central
body,
find the feasible orbits
that pass
through both points, and find the required velocity vectors at the
tial
point
transfer
that
correspond
orbits.
to flight
paths along any of
ini-
the feasible
The technique for solving this problem has been des-
cribed in detail by Battin (ref. 2) and will be summarized below.
If
a
points,
(the
chord)
is
drawn connecting
then any velocity vector at
terms of
radius
line
a component
vector
(see
parallel
figure
equal to 180 degrees.
to
2-1)
If
the initial
either point
the chord and
provided
the transfer
and
can.be defined in
one parallel
angle,
or,
then from fundamental properties
relationships
V
re
ItD
to the
is
not
Vreq and V2 are velocity vectors at PI and
P2 respectively, and if they correspond to an orbit that passes
P1 and P2'
target
= V
2c
= V
c
D3
through
of orbital mechanics,
the
_____ __ __ __ _ _ I_
_ _~ _ _ _
_
- ----- -
- ---- --
__
_
_
__ _
',N
\
at
\
9
/p, Vrp
Figure 2-1
can
Geometry of the Orbital Boundary-Value Problem
easily be derived, where
tial
position;
components;
lity,
the
radius.
2 denotes
and
target
target or
radius can
city
the
final position;
be
taken to
c denotes
or inichordal
Without loss of genera-
be greater than the
initial
The chord can be found from the law of cosines
2
the
subscript r denotes current
p denotes radial components.
C
and
the
2
= r
2
+ r2
- 2rr
2
cos
(2.1)
product of the chordal velocity component, Vc, and radial velo-
component,
Vp,
can then be expressed as a function of the chord,
initial and final radii, and the transfer angle, a,
in the form
VV
-
c p
This relationship
at
the
initial
(2.2)
r r2(1+cos)
defines
an infinite family of velocity vectors
point and at the target point,
and is
in
the asymptotic
form of an equation for a hyperbola -- with the chord as one asymptote
and the radius as the second asymptote.
sents
the locus of all
This hyperbola at PI repre-
feasible velocity vectors at the initial
point,
and the hyperbola at P2 corresponds to the locus of the resulting velocity vectors at the target point-, as shown in figure 2-2.
N
Properties
N
N
N
N
r
Figure 2-2
of this hyperbolic
the orbit-fitting
veczor,
e
from P. co ?)
Hyperbolic Velocity Loci at P
locus will be exploited later in
targeting
(chat
PI
technique.
wnich corresponcs
:o
Since
the
and ?
the development of
required
velocity
light along a feasible orbit
is not yet uniqueiv specified, one more parameter, such
UI
as
target velocity
or target flight path angle, may be specified.
Se-
lecting either one of these will uniquely determine a feasible transfer
orbit, and hence will also determine a unique required velocity at the
initial point.
permit
The orbital
boundary-value problem,
desirable
means
does not
the designation of both the target velocity and target flight
path angle as target parameters.
is
however,
Since, for many types of missions, it
to specify both these variables as target parameters,
must be found to eliminate
a
this restriction from the boundary-
value problem.
If
either of
the target parameters upon which the boundary-value
based --
problem is
target radius
fied as a target parameter,
or transfer angle --
the restriction is
is not speci-
removed and any two of
the remaining three unspecified variables may now be selected as target
parameters.
velocity,
Thus,
of the complete set of four parameters available --
altitude,
may be chosen as the
flight path angle,
target parameters,
and transfer angle --
any three
and they will uniquely deter-
mine an orbital path that passes through the initial point and achieves
the desired target conditions at the target point.
sections,
In the following
the necessary relationships will be established that allow a
solution to be found for any of the four such combinations of target
parameters.
2.2
Solution Techniaue for Any Choice of Target Parameters
When any three of the targec parameters are specified and the
initial oosition is known,
the
fourth parameter is also determined,
and can be found as a function of the three specified parameters and
the initial
radius.
completely specify
The fourth parameter must be found in
order to
th-e geometry at the target point and to eventually
find the required velocity at the initial point.
To start, the geometry at the target point is expressed in terms
of the angles
3
and q , as shown in
figure 2-3.
The perpendicular dis-
tance, A, from the the radius to the tip of V2, can be found as
A = V 2 sinr
(2.3)
and the perpendicular distance from the extension of the chord to V 2 is
B M -V 2 sin(3+)
A and B can also be expressed
and V
in
(2.4)
terms of the velocity components,
Vc
as
A = Vc sinS
(2.5)
B = V
(2.6)
sins
Since the locus of possible velocities at P2 is a hyperbola (as
established in equation 2.2), using the property of hyperbolas that the
product AB is equal to a constant, AB can be found by multiplying
equations
(2.6).
(2.3)
and
(2.4),
and also by multiplying equations
(2.5)
and
Setting the resulting expressions equal to each other gives
AB = -V,
Now equation
sinr
sin( +i)
2.2) can be subst _tutea
= V V
sin
(2.7)
for :he product 7 V
and if the
c D'
r
C
Figure 2-3
chord, C,
Detail of Geometry at P
is replaced by
sinr
C = r
sina
(2.8)
the resulting expression is
,u
an'-=
s slnn t2
-s2
2
scnn
sin(--)
(2.9)
To eliminate
3 from this equation,
a useful relationship can be
developed by expressing r2 as
r
2
= rl cdsc
-
and substituting equation (2.8) for C,
cot3 = cota -
3
Then
C cos
(2.10)
for 5
then solving
gives
(2.11)
rI sino
can be eliminated between equations (2.9)
and -(2.11),
with the
final result
+ r 1 r 2 V2
)rl(1-cose)
Recognizing that rq =T/2 -
)rl(1-coso-) + r r2V2
This
is
the
parameters
--
to
desired
--
sinrlsin(a+q) = r
2
2
V2
2
2
sin 2
(2.12)
2' equation (2.12) can be written
2
22
cos42 cos(2-cr) = r 2 V 2
expression which relates
altitude,
each other,
2
velocity,
and once any
flight
all
cos
2
(2.13)
the possible
path angle,
three of
2
target
and transfer
these parameters
angle
are spe-
cified, the fourth can be found directly from this relationship.
2.3
Altitude, Velocity, and Flight Path Angle as Target Parameters
In
city,
variable,
this
V2,
particular
case,
and flight
o,
must
the target altitude
path angle,
be
metry of the problem.
found
in
2', are
order
To solve for
or radius,
specified,
and
r,, velo-
the remaining
to comoletelv determine
a from equation (2.13), the
the geo-
substitution
x =
(2.14)
cot-
2
can be used, with
sina =
2x2
-+x
2
1+x
cosa
-
l -x
2
i-Cos'
= -2
l+x
1+x
The result is a quadratic in x, of the form
ax 2 + bx + c = 0
where
a =
2 2 (r2-r1
) cos-0
(2.15)
2
(2.16)
c
= 2=rI
- r2V
2
2 (r+r
2
2
) cos .02
(2.17)
The quadratic can easily
be solved
with the standard quadratic
equa-
tion, and once x is found, equation (2.14) gives the answer for a.
Equation (2.13)
parameters.
2.4
used for
any other combination of target
However, only the case completed above will be explored in
further depth, since
missions.
can be
this case
is
the most useful
for common space
(The remaining three cases are solved in Appendix A).
Finding the Required Velocity
Once the values of all four target variables are known, the
geometry of the feasible transfer orbit is fixed and the velocity at
the initial point can be determined.
the geometry
is
To find the required velocity,
figure 2-4.
set up as shown in
The internal angle,
g,
between the chord and the radius vector to P2, can be found from the
law of sines
sine
r
sin
C
(2.18)
(2.18)
but the geometry also shows that
2 '- -
Substituting equation
(2.19)
for
8
- *2
(2.19)
into (2.18)
and using a trig iden-
tity gives
cos(4
which allows solving for
2
+
2)
- sincr
(2.20)
2 once 02 and o are known.
The velocity at the target point, V2 ,
can be resolved into its
component in the chordal direction, Vc, and its comDonent in the radial
direction, V
p
V 2 cos*
2
= Vc cos(6
V2 sinO2 = VC sin(,2 + 02
and Vp and Vc can be solved
2)
2
)
2.2)
- Vp
(2.22)
for in terms of V 2 from equations (2.21)
and (2.22)
V
V
tan(-
-
)
oso
-
sin1
(2.23)
_ ___
_____
_______
_______I____
________________
________
VVI
Figure 2-4
Geometry of Velocity Components at P and
1
1 an
?
and
V
If
equation
(2.24),
V
c
(2.20) is
and V
used
can be
p
c
V2C
=
cos#
2
(2.24)
cos(2+ 2
to eliminate
$2
from equations
expressed solely in terms
(2.23) and
of known target
parameters and r
2 sin Y
1V
cos2 - sino-
= V
(2.25)
- sinW
cC
V
c
2C cos2
rI sincr
(2.26)
Additional useful relationships are
Va
V
To
find
the
cr
required
sin(o+S)
V
= V
c
(2.27)
icos(a+S)
velocity
(2.28)
vector
at
the
point,
initial
two
cases must be considered:
1)
a +
g
< r/2:
From the geometry, clearly
V
= V
p
rr
and
the
angle,
veloci=v vec=or is
9,
between
the
local
(2.29)
horizontal
and
the
required
V
9
-
+ V
cr
V
V
p
arctan
(2.30)
then the magnitude of the required velocity is given by
V
req
2)
a +
S
>
2
)
(V +V
p
cr
-
2
+ V
a
2
(2.31)
/2:
In this case the geometry shows that
V
= V - V
rr
p
cr
(2.32)
9=arctan (r
(2.33)
leading to
V
req
Substituting
equations
2
2
2
MV
+ V
rr
a
the appropriate expressions
(2.30)
(2.34)
for Vrr'
rr'
V
through (2.34) yields expressions for V
,
and
req
Vcr into
and 9 which
hold for both cases
V
2
req
= 2V V
p c
cos(a+6) + V
V9
=
arctan
V
V
9
c
(2.35)
cos(a+8)l
(2.36)
sin(ca+)
c
where
S
is found, from equation (2.18) as
i
arcsin
C
sinr
,
(2.37)
To
9
eliminate
from
equation
(2.35)
are expanded, and equation (2.37) substituted for
cos(0+)
cosa
=
cos(o+S)
and (2.36),
-
sin cr
-
S
and sin(a+S)
to give
sin o
-
C
(2.38)
and
sin(a+S) = sin
1 cosa +
2 sin2c
and (2.39)
(2.38)
substituting equations
and finally,
1 -
(2.39)
into equations
(2.35) and (2.36) gives the result
2
req
req
2
2V V
cp
cosa
-
1
r
2
sin a
1
- -C
2
I
2
a + V 2
c
(2.40)
with
F
r
cosa
1 ---
sn
r
--
a
SV arctan
(2.41)
Va sina I-
These expressions
coscr+
involve only the chordal and radial velocity compo-
nents of V2, found from equations
variables,
sin a
(2.25) and (2.26), and other known
and provide a way of finding the required velocity once all
the target parameters and initial point are specified.
technique for finding V
req
(An alternative
and 9 is presented in Appendix 3.)
2.5
Soecialization for Target Point at Apogee
Since most orbital
tually
fer
flight
transfers
reach a. circular orbit,
and maneuvers are intended to-even-
it is
useful
to specify that the trans-
orbit reach the altitude of the desired circular orbit with a
path angle equal to zero.
the transfer orbit is
vector perpendicular
This means that the apogee radius of
the radius of the circular orbit, with velocity
to the radius.
The transfer angle,
a, can now be
determined directly by using an additional relationship specific to the
case of the target point at apogee of the transfer orbit.
Knowing V 2 and r2 , the semi-major axis,
a,
of the transfer orbit
can immediately be found from the Vis-Viva equation
V
(
2
-
(2.42)
thus
a =
-
--
(2.43)
From Battin (ref. 3) the parameter, p, can be expressed in the form
rlr
p =
r
2
-
2
r I cosO
(1-coso)
(2.44)
and the eccentricity, e, is found from
r
e
where a still remains
to
r2
- r
2
- r
be found.
(2.45)
c o s cr
3y using the relationship
25
p = a(i-e )
equations
p and e,
(2.46)
(2.44) and (2.45) can be substituted into equation (2.46) for
and o can be found in terms of the semi-major axis, with the
result
2ar
coso =
ar
I
-
2
2
- yr I
r 1r2 V2
this
2
r r2
V
coscr =
check,
r2
finally gives
r2
As a
-
(2.47)
ar
Substituting for a from (2.43)
-
(2.48)
2
- yr
agrees with the result obtained from equation (2.13)
if 02 is set equal to zero.
With o now determined, 02 can
(2.25)
and
(2.26),
be set
and the chordal and
equal
to zero
radial velocity
in
equations
components
become
V2C
V
c
V2
V
p
The
required
and (2.41).
=
=
r
r.
-
(2.49)
sino*
sin
0-
(2.50)
sina"
velocity and 9 can now be found
from equations
(2.40)
2.6
Range of Feasible Required Velocities
At
V 2 as a
this point, it is advantageous to explore the feasible range of
function
ding on rl
and
of
r
2
--
ble orbit
passes
satisfies
the target
are
selected,
the
r
and r2.
i
through
both the
less
initial
conditions.
and target points
and also
This is true because once r 2 and V
2
semi-major axis of the orbit is fixed from equation
r
is
of V 2 is restricted, depen-
there being a maximum value above which no feasi-
(2.43) and the perigee radius of
If rl
The choice
than r
,
then
= 2a -
r2
clearly
through the initial point,
actual maximum value
the orbit is
no
(2.51)
point
in
the orbit
and the problem cannot
be
will pass
solved.
of V 2 can be found by determining
The
the maximum
feasible semi-major axis for the transfer orbit
r
a
+r
1
max
(2.52)
2
corresponding to an elliptical orbit with perigee at r i and apogee at
r2
.
This gives an upper limit
on V 2
2
2
1
a(2.53)
r
2max
2
max)
The lower limit of V 2 that still yields a feasible orbit is
V2min = 0
2min
and :he associaced semi-major axis is
(2.54)
a
min
=
"2
2
(2.55)
corresponding to an orbit that travels a straight line from P
to P
and reaches P2 with zero velocity -- not very useful for practical
purposes.
The upper limit will become important later, however.
CHAPTER 3
Guidance Algorithm
3.1
Overview
The technique developed
required velocity vector can
algorithm for a spacecraft
spacecraft's
nated
trajectory,
the initial
in the preceding chapter for finding the
easily
be
incorporated into a guidance
in powered flight.
the
point, Pi,
At any point
in the
vehicle's current position can be desigin the boundary-value problem, and the
problem can be solved for that particular initial point and a specified
set of
target
however,
it will not
velocity, and
with the
conditions.
Unless
be able
the process
to
the vehicle has
instantaneously achieve the required
must be repeated some time interval later,
vehicle's updated current position as
the problem.
infinite thrust,
This procedure
therefore
the new initial point in
lends itself well to computer
trajectory simulations in which the vehicle's position is determined-at
discrete
time
motion.
At
has
intervals
each time
been chosen, the
interval,
integrating
the equations of
then, once a set of target conditions
required velocity vector for the vehicle at its
current position can be
that
by numerically
found, and a guidance algorithm followed such
the vehicle's velocity vector eventually equals the required velo-
city vector.
The control
are :he vehicle :hrusc
variables available for use
in this problem
level -- most convenienivy measured as a per-
centage of the maximum available thrust --
and the thrust angle, the
angle between the thrust vector and the velocity vector.
While a
spacecraft cannot directly control the thrust angle, it does so indirectly by controlling the rocket nozzle gimbal angle, but using the
thrust angle as a control variable avoids the necessity of including
the dynamic relations between the nozzle gimbal angle and resulting
thrust angle;
these relations are vehicle-dependent, and contribute
nothing to the analysis of the original problem.
Hence the choice of
thrust angle as the second control variable.
3.2
Velocity-to-be-Gained Determination
Once the required velocity for the vehicle's current position has
been found, the velocity-to-be-gained, VG, is defined as the vector
difference between the required velocity and the vehicle's current
velocity (see figure 3-1).
If 0 is
from the
the current
flight
path angle of
the vehicle, measured
local horizontal, and V 1 its current velocity, then V G can be
determined from the
V
2
G
law of cosines
2
= V
+ V
2
-
2V
Vl cos(*-9)
(3.1)
req 1
req
and the angle,p , between V I and VG can be found from the law of sines
/3=
arcsin
re
\ vG
sin!o-l)
(3.2)
__
__~___~___~___~_
___
_________I____________________
e<0
Figure 3-1
In many cases, 0
is
Velocity-to-be-Gained Determination
greater than 90 degrees, but the arcsin function
will return values only between -90
and 90 degrees,
so for the case
where
2
V
G
3 must be corrected
+V
2
1
<V
2
req
to
V
?T -
3.3
arcsin
(VG
sinL4-9
(3.3)
Thrust Angle Determination
For
choose
the sake of simplicity, the guidance algorithm to be used will
zhe thrust vector such :hac
its direction is aligned wich :he
angle,
IF
v,
it easy to find the thrust
This makes
velocity-to-be-gained direction.
as follows.
9 < 1:
and if
9 >
0(. = 7T
-
(3.4)
0( =
- T
(3.5)
p:
and of course if 9 = p:
C<= 0
3.4
Thrust Level Determination
A spacecraft
will
rl)
in powered flight,
and must avoid
target
occurs,
its main engines
tune"
its
it can reduce
therefore,
thrust
interval
the
be
that corresponds
predicted,
if
to the
increment to the
must
orbit
vehicle
than Vreq.
(provided
the
2
>
for the
velocity must be
vehicle can either stop thrusting
using smaller
the vehicle has
level
required
overshooting
vehicle's
and
r
During the time interval
to the target,
or
trajectory,
required velocity without
this,
the
Specifically,
and coast
its
its
its energy beyond that required
from becoming greater
before this
"fine
increasing
transfer orbit.
prevented
the energy of
increasing
be continuously
thrusting in the VG direction,
then
to a velocity increment
it.
engines to
engines,
throttleable
to exactly match the
In order
to
accomplish
velocity during the next
the
thrust
that is
level
time
must be found
less tnan or equal to
VG.
This can be done in the following manner.
The
propellant
mass
flow
rate
is
determined
from
the vehicle
thrust, T, and exhaust velocity, c
dm
dt
-T T
(3.6)
c
and for a given time interval, Dt, the change in vehicle mass, Dm, is
T
Dt
c
Dm = -
(3.7)
IF mk is the vehicle mass at the beginning of the time interval, and
mk+ 1 is the mass at the end of the interval, then
mk+1 = mk - Dm
(3.8)
and substituting equation (3.8) into equation (3.7) for Dm gives
mk
m
T
- -- Dt
(3.9)
The rocket equation can be applied now, since, if Dt is
enough,
pulsively
the behavior
of the vehicle will be as if
at the beginning of the time interval,
small
it had thrusted imand the velocity
increment, DVk, is then
DVks i -cfoimk+0e
n
solving for mk-1 g3ves
(3.10)
finally, substituting for mk+
(3.11)
mk e
mk+ 1
from equation (3.9) and solving for T
1
determines the thrust required to achieve a specified DV
DV
T
1-
Dt
e
(3.12)
c
At- the point where using maximum thrust would cause DVk to exceed
VG ,
VG should be substituted
thrust
level
when a
new V G
is
priate
thrust
level
zero,
way
the
to
than
its
the
process
determined
it
has
be repeated and
Once
achieved
and the new
At the next time interval,
should
again.
(3.12)
VG
the appro-
becomes exacly equal to
perfect
the
rest of
alignment
with
the
the
maximum
altitude,
as
has
ter than V
if
with
discussed
the
target
climbed
the
feasible
position.
orbit
and
Infeasible Target Velocities
arrises
current
vehicle
time interval.
since
for
problem
the
low
equation
transfer orbit.
elliptical
is
that
found,
target,
Guidance
A
for
in
vehicle can stop thrusting entirely and coast
the
desired
3.5
used
for DV.
target
(Recall
the
in
selected
vehicle's
section
high
high,
is the
current
2.6)
In
it
enough altitude
During :his phase of
velocity,
velocity, V2max)
that V2max
velocity
to a
target
V2,
for
is
the vehicle
apogee
if
could be
that
its perigee
the vehicle
some
at
velocity of an
altitude as
fact,
greater
time
V.ma x
-he flignht a "emporary"
thrust
before
the
becomes grea-
guiaance
scheme must be used, and several options exist for doing this.
First, a temporary
is almost
target velocity,
equal to V2max*
V2t
'
can be chosen, where V2t
(If V2t were set exactly equal to V2max
,
the
180 degrees, where a singularity exists in
transfer angle would be at
At each time step, as the vehicle altitude increases,
the algorithm.)
V2max will increase, and therefore V2t can also be increased.
Even
tually V2max will be greater than the original desired V 2 and the
targeting technique may be used.
orbit-fitting
abrupt changes
in
the required
has the disadvantage
path angle of zero,
phase to the second,
from the first
tees a smooth transition
that
since
it
velocity or flight path angle,
but it
the perigee of the temporary transfer orbit
Since a vehicle under
tends to spiral outward and its flight path angle
tends to increase,
against
with no
attempts to keep the vehicle at a flight
is always placed at the vehicle's position.
thrust naturally
This technique.guaran-
this
the radial
scheme would require that the vehicle thrust
component of its velocity --
an inefficient
proce-
dure and wasteful use of fuel.
A second possible scheme would simply allow the vehicle to thrust
tangentially to its flight path and follow a natural gravity-turn
is
spiral trajectory until it has reached the altitude where V
greater
fer
orbit
than V2.
at
vehicle will
its
first
perigee,
it has intersected the feasible trans-
where the
flight
path angle
immediately be required to 1hrust against
city component.
the
At that point,
scheme,
It
spends much
since now
the
less
flight
is
zero,
and the
its radial velo-
time doing so, however, than in
path angle
transfer orbit increases wi:h altizude, and :he cesul:
of
the feasible
is better
:uel
efficiency than the first scheme.
thrust angle rate of change,
If a constraint is placed on the
abrupt changes in
the vehicle's pitch can
be avoided, and the transition from this first phase into the orbitfitting targeting phase can be made smoothly.
The third possible scheme would involve intercepting the feasible
transfer orbit at some point other than at perigee.
where
the difference between the tangential-thrust
An a-ltitude exists
trajectory velocity
and the transfer orbit velocity is a minimmum. ,Presumably, it would be
most efficient
VG point
to perform the transition at this point,
but the minimum
cannot be found analytically, and can only be
identified
during the trajectory by monitoring VG and watching for the point where
VG just starts to increase after reaching a minimum.
By that time,
however, the required thrust angle is very large, often greater than 90
degrees,
is
and if
required
the transition is
performed at this point,
to thrust at a large angle from its flight path until it
aligns itself with the desired transfer orbit.
of
the vehicle
minimum VG could be found, since
sharply away from the vehicle's
inefficient
the minimum VG usually points
velocity,
use of fuel during this
Even if the exact point
transition
the result would still
be
to the orbit-fitting
targeting technique.
The second scheme ends up being the most efficient of the three
alternatives
trajectory
than V
2max'
described,
simulations
and this
is
the technique implemented in
the
to handle cases where V2 is initially greater
CHAPTER 4
Technique Applications and Results
4.1
Overview
Two
missions
were
technique:
LEO
These
represent
cases
spacecraft
the
case
fairly
GEO
two
of LEO to GEO
of
any
for
the
as
and
of
given
technique
thrust
transfer
is but
For
to
find
blished
in
launch
launch
optimum
and
the
to LEO
targeting
insertion.
maneuvers
in
future operations as
and
involve
from
therefore
well.
the
be
In
perforcompared
this case can also be
orbit-to-orbit
of
current
can be found
paper can easily
this
of maneuvers
results
can be
effects
the
are
earth
involving
case,
trajectory,
from any celestial
situations
the
which
circular
transfers,
LEO to GEO
one example.
the
body,
frequent
The results
which
broad class
earth
the
atmospheric
another
maneuvers
the
launch
level,
developed
other
is
for
transfer, a near-optimum trajectory
applied
this
most
probably in
near-optimum values.
since
applications
earth
the
with known
to
test
transfer,.and
operations,
easily
mance
to
selected
while
a
body,
compared
case
and
is
considerably
reasonable
neglected
launch
it
value
with
or are
can
this
has
known
changed
be
the results
launch and insertion
more difficult
into
to
considered
been well
value.
match
If
the
those of
an example
may be applied
any orbit.
esta-
of
to other
4.2
Simulation Technique
The
simulations were performed by applying a standard
trajectory
Fourth-Order Runga-Kutta integration algorithm to the spacecraft equations of motion.
(For a description and development of these equa-
tions, see Appendix C.)
The set of initial conditions --
velocity, and flight path angle --
altitude,
were selected according to the
specific mission being analyzed.
Constant thrust was used throughout
most of the engine-firing phases,
without regard to maximum accelera-
tion limits,-
limits could be imposed if
although acceleration
desired.
For all of the missions studied, however, the acceleration levels never
became high enough that constraints would have significantly affected
the performance.
The vehicle was therefore allowed to use maximum
thrust until
the end of the burn when the vehicle velocity ap-
near
proached the required velocity,
at which point the thrust,
assumed to
be throttleable, was reduced as required.
Values could be chosen to limit the maximum thrust angle (hence
vehicle pitch rate)
and the maximum thrust angle rate of change during
the thrusting phase.
However, after thrust was reduced and the veloci-
ty-to-be-gained
below
left
fell
unconstrained
the trajectory.
listic,
--
1 m/s,
the thrust angle and pitch rate were
to allow "fine-tuning" or continuous corrections
While
an actual
this type of continuous adjustment
spacecraft
lified.
not rea-
would only perform a small number of
discrete mid-course correction burns -ments,
is
to
by allowing continuous adjust-
the accumulated numerical and roundoff errors end up being nulThis occurs
exactly at each
time
because
the desired transfer orbit is
calculated
step, wich no approximations, and the guidance
algorithm corrects
numerical
for any deviation from thisb transfer orbit.
arising from the use of an approximate
errors
The
integration
technique are regarded simply as deviations from the desired path and
are thus corrected for, with the end result that the trajectory is
closer to an exact actual trajectory and the target values are reached
with extremely
high precision.
Since allowing continuous correction
ends up consuming more fuel than would otherwise be necessary, the
delta-v required for the mission is calculated at the point where the
thrust
the
is
first
reduced and the velocity-to-be-gained
point at which an actual
coast
the
rest
of
the way to
is
vehicle would shut off its
the
target.
below-I m/s,
engines and
(The computer program to
perform the simulations is listed in Appendix F.)
Once
the
vehicle
has reached
the
target
altitude,
an additional
burn must be performed to insert the vehicle into a circular orbit. For
the sake
least
fuel,
of simplicity,
this
and the required
and because it
burn was
chosen
is
the option that requires
to be impulsive in
the
the simulations,
delta-v is simply the difference between the circular
orbital velocity and the apogee velocity of the transfer orbit.
4.3
Orbit-to-Orbit Transfer Trajectories
The Orbital Transfer Vehicle (OTV) model was selected on the basis
of
For
what might
eventually be in
reuseability,
space
engine,
liquid
use as part of future
space activities.
fuels, with an engine such as the advanced
would be used,
target conditions as follows:
with vehicle
parameters
and initial
and
specific impulse: 450 seconds
initial mass:
25,000 kg
initial acceleration: 0.03 to 3.0 g's
initial altitude:
LEO at 372 km
initial velocity:
7684.5 m/s
target altitude:
GEO at 35,863 km
target velocity:
1612.6 to 2110.0 m/s
final velocity:
GEO velocity -- 3071.9 m/s
The apogee velocity of the transfer orbit was varied between 1612.6 m/s
--
the Hohmann transfer orbit apogee velocity --
ding on the thrust level.
through trial
The actual
and 2110.0 m/s, depen-
target velocity was arrived at
and error as the one that yielded the minimum total mis-
sion delta-v for a given thrust level.
For high thrust, the optimum
target velocity is clearly near the Hohmann orbit apogee velocity,
since the Hohmann transfer is optimal for infinite thrust capability.
The optimum target
ses,
since,
equal
for
velocity will increase as the thrust level decrea-
infinitesimal
to the circular
thrust,
the target velocity is
velocity and the vehicle is
exactly
very close to circu-
lar velocity throughout its trajectory (see ref. 4).
The near-optimum
was
to be used for performance
found by requiring the vehicle
gential
it
trajectory
to
would be
tude,
its
in
flight
if
path.
it
stopped
the vehicle was
delta-v
calculated
at
to thrust
comparisons
in a direction always tan-
When the instantaneous orbit ---
thrusting
allowed to stop
that point.
the orbit
had an apogee at GEO alti-
thrusting, and the
required
(For details of how this trajectory
can be found, see Appendix D.)
The
initial
resulting
trajectory
for
a
sample
LEO
acceleration of 0.03 g's and thrust angle
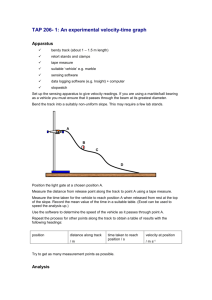
is shown in polar form in figure J-.
to GEO
transfer
with
limit of _ 25 degrees
Since the target velocity of
4500
GEO
--
I
900
tangential
-thrust
phase -180 °
-- -
earth
--
-3600
- - ---
' LEO
t
~thrust
cutoff
270*
Figure 4-1
2110 m/s
kin,
a
tion
tude.
led
to a
tangential
3.5,
until
targeting
start
Sample LEO to GEO Transfer Trajectory
transfer orbit with a perigee at an altitude of 6600
thrust
the
trajectory was
vehicle
reached
followed, as
the
transfer
After that point, the orbit-fitting targeting
explained
in sec-
orbit perigee alti-
technique was used
until the vehicle velocity matcahed the required velocity and could stoD
the vehicle coasted
For the remainder of the trajectory,
thrusting.
along the elliptical transfer orbit until it achieved the target conditions.
Figure 4-2 shows the plots of the individual variables versus
time, giv-ing the behavior of the trajectory in more detail.
The thrust
is sustained at its maximum value until cutoff.
The thrust angle moves
to its
initiated,
lower limit as soon as the targeting
to a slightly
after
positive value,
thrust
cutoff,
as discussed in
is reached.
then climbs
and then can be considered equal to zero
even though minute corrections are taking place,
section 4.2.
The altitude increases steadily until GEO
The velocity increases at first,
vehicle spirals
energy.
is
outward,
then decreases as the
gaining potential energy rather than kinetic
When the targeting begins and the vehicle is commanded to
pitch down,
the velocity increases again until it
velocity for the vehicle's current altitude.
reaches
the required
After thrust cutoff,
the
vehicle coasts,
trading kinetic for potential energy as the velocity
decreases until
it reaches the target value.
increases
as the vehicle spirals outward --
at first
of the changing
acceleration
of increase of the
the vehicle is
The -flight path angle
flight
unsteadily because
as the vehicle burns off fuel.
The rate
path angle slows when targeting begins and
commanded to thrust slightly downward,
the thrust angle becomes positive.
then steepens as
At thrust cutoff, the flight path
angle has matched that required on the transfer orbit, and it follows
the
transfer orbit profile until the vehicle reaches apogee where the
flight path angle crosses zero.
Figure 4-3 shows a partial listing of the actual output from the
100
S
S~
80
-
60
-
o
20
S0
-
targeting
start-.*
S
o
S
i
5,000
l
10,000
15,000
20,000
25,000
30,000
Time, seconds
Figure 4-2a
-
Thrust, Thrust Angle vs Time -- LEO to GEO Transfer
40,000
35,000
30,000
25,000
20,000
15,000
10,000
5,000
0
5000
10,000
15,000
20,000
25,000
30, 000
Time, seconds
Figure 4-2b
--
Altitude vs Time -- LEO to GEO Transfer
--------------
- -------
- ---------------
_~_~___~_
______________I_______
______________________
8000
7000
6000
5000
4000
3000
2000
1000
-
0
5 ,000
10,000
15,000
20,000
25,000
30,000
Time, seconds
Figure 4-2c
Velocity vs Time -- LEO to GEO Transfer
5,000
10,000
15,000
20,000
25,000
Time, seconds
Figure 4-2d
Flight
Path Angle vs Time -- LEO to GEO Transfer
30,000
printed out
trajectory, with values
complete
listing is
every five integration steps.
shown in Appendix E.)
The values
(A
for the velocity,
altitude, and flight path angle in the last line of the trajectory show
that
the
target
values
figures
as
are
closest
to
zero,
for
cases
all
nique.
In
behaved as
The
as
at
for
requirement
burn,
gential-thrust
performance
on this
have
m/s.
The
of
and
required
a
unrestrained
were made
based
The
in
4-1
tory
thrust
very
table
levels,
transfer
for
this
total
values
delta-v,
differ
of
a
and
m/s
the
--
an
technique,
that
the
g
thrust
technique
thrust
The
restric-
trajectory
of
66
the worst-case
and
thus
--
levels.
as
other
trajectory.
performed
initial acceleration,
is-optimal for high
tan-
%.
increase
angle
transfer ellipse
of
the
from the
by only 0.88
m/s
case
including
constraint,
on an unrestricted
above 1
tech-
value
slightly by having
4515
targeting
show
the
particular
compared with-4410
closely resembled a Hohmann
since a Hohmann
viability of
is
achieved
near-optimum
such
orbit-fitting
angle
the accuracy
trajectory, however, represents
comparisons
the
path
relatively stable and well-
3486 m/s
delta-v
for
higher
These
flight
significant
target.
with a
without
total
of
the basic
trajectory was improved
angle,
the
tangential-thrust
4449 m/s,
performance
figures
of
phase,
trajectory.
thrust
would
the
thrusting
circularization
where
is typical
the
as many
(to
the algorithm remains
with
the
point
This
the vehicle approaches
3425
exactly
and demonstrates
addition,
favorably
the
the
desired.
tested,
compares
ted
achieved
displayed)
delta-v
m/s
are
better
at
the trajecit
should,
_1_
__1_1___1_____ _____I_______________
thrust/M=0.03 s.
LEO to GEO trans+er with
7355.0 N,
0.0 m^2,
AloaMax= 25.0 deg,
TargetH= 35863.0 km,
Sre+=
t
C= 4500.0 m/s,
MO= 25000.0 kg~
Ot= 20.0 se: 0.0 km,
hstart=
AiphotMax=360.0 de
TargetV= 2110.0 m/s
=hi
ima
VG
0.000
0.000
0.00
372.074
372.746
374.689
378. 562
385. 09
394.6 &3
408.031
.019
.08
.206
.372
582
.35
1.127
0.00
425.699
I
/48.107
1.813
&75. 650
508.653
547.362
591.969
642.505
699.049
761.530
2. 199
2.608
3.035
3. 75
3. 923
4.376
6.535
13.095
19.677
26.280
32.898
39-.526
46.157
52. 7854
59. 399
65. 992
72.552
79.071
529.834
5.279
5.721
V
0.0
Starting
100.0
200.0
300.0
400. 0
600.0
700.0
900.0
I000 .0
1100 .0
1200.0
1300.0
1400.0
1500.0
1600. 0
1700.0
1800.0
1900.0
2000.0
2100.0
2200. 0
2300.0
2400.0
2500.0
7684.5
targeting
7713.9
7742.8
7770.6
7796.3
7819.4
7839.2
7855. 1
7566.6
7873. 3
7874.8
7871.0
7861.6
7846.6
7826.2
7800.5
7769.8
7734.3
7694.5
7650.8
7603.7
7553.5
7500.
7&46. 1
7389.8
7332.2
28200.0
2123.9
2122.1
2120.5
2118.9
2117.5
2116.2
2115.0
2113.9
2113.0
2112.2
2111.5
2111.0
2110.5
25300. 0
2110.2
27000 .0
27100.0
27200.0
27300 .0
27400.0
27500 .0
27600.0
27700.0
27800.0
27900.0
28100. 0
25400 .0
372.000
2110.0
M+uei= 24000.0 kg
aimha
Thrust
DeitaV
0 .00
mow.
903.790
983. 180
1067.746
1157.203
1251.242
1349.542
1451.774
1557.614
35731.360
35768.400
35764.Z70
35778.950
35792.450
35804.770
35815.900
35825 .60
3583& A 40
35842.230
35848.660
35853.370
35857.930
35860.300
35862.490
Alignment acnieveO, ::ast:ns
28500.0
____________
T-ajectory
Tareted Saceffisqt
Thrust-
_____
35863.000
.454
85.539
6.574
6.980
7.370
7.7463
8.097
8. 33
91.965
98.280
104.535
110.703
116.777
122.750
128.616
134.373
140.017
145.546
150 .958
156.253
4.764
444 .066
4. 4458
44a. 354
4.131
3. 13
3. 495
3.177
2. 58
2.539
2.219
1.900
1.580
444.641
4.829
6'.154
S1.260
940
.621
.299
444 929
&&5.216
&5.503
4&5. 790
4a6. 077
4a6. 363
446.6 50
6. 936
447 .223
447.509
4a7.795
/48.01
:.Oc
0.00
0.00
0.00
0.00
0 .00
0.00
U.
0.00
100.000
100. 000
0.00
100.000
:30.
00
100.000
100. 000
0
10. 000
.00
loc. 000
0.00
C.CC
0 .00
C.cc
0.00
0.00
.00
0
O0
0
000.00
0 .0
0.00
0.00
0 .00
0.00
0 .00
0.00
0.00
0.00
0.00
100.00
100.000
100.000
100.000
100.000
100.000
100.000
100. 000
130. 000
100.000
100.000
100.000
0.00
o oo
100.
C
100.000
100.000
100.000
81.05
025
0.00
.00
.01
00
.20
-98.54c
.00
*UO0
.00
.02
90 . 02
55.26
138.93
90.00
86.02
57.50
.i00
.02
.01
.30
90 . 00
58 .25
-90 . 96
90. 00
210.50
241.74
272. 9
30
2.
335 . 85
367.66
399.70
431.97
4664.47
497.21
530. 19
563.41.
596.88
630 .60
664.57
698.81
733.30
768.06
503.10
.010
3506.
3506.51
3506.55
3506.58
3506 .60
3506.62
3506.66
3506. 69
3506.76
3506.51
3506.54
3506.87
3506.91
3507. 1
3507.19
0.000
3508.69
55. 08
87.1
.038
.013
.029
.1359
.002
.004
027
.130
.010
186
.113
now.
-. 0440
0.00
0.00
7arget acnievec.
Figure 4-3
29.52
59.23
9. 14
119. 25
56
19.
150.08
Partial LEO to GEO Transfer Trajectory
Thrust/M 0
V 2 for
aV Tangential
g's
min AV
Thrust
m/s
% Difference
Trajectory
m/s
in
AV's
m/s
0.03
2110.0
4409.9
4514.6
2.49
0.10
1680.0
3998.8
4081.0
2.06
0.30
1620.0
3871.0
3897.2
0.667
1.00
1612.6
3866.8
3872.6
0.150
3.00
1612.6
3865.9
3867.1
0.031
Table 4-1
4.4
AV Targeted
AV Comparisons for LEO to GEO Transfer
Launch Trajectories
The launch vehicle model was chosen, for simplicity, to represent
a single-stage-to-orbit vehicle with a 100,000 kg launch mass.
A Space
Shuttle Main Engine (SSME) could be used, and the vehicle parameters,
initial and target conditions were as follows:
specific impulse: 450 seconds
initial mass:
100,000 kg
thrust:
1.6 million Newtons
initial altitude:
0 km
initial velocity:
I m/s
target altitude:
LEO at 372
km
target velocity:
7000 m/s
final velocity:
LEO velocity -- 7684.5 m/s
The
initial
singularity
was
in
chosen
with a
size,
to
variable
velocity
the
is
equations
resemble
a
area
50 sq.
Since flight near the earth's
rather
of motion.
streamlined
reference
but a value of
1 m/s
than
0 m/s
to avoid
a
The vehicle aerodynamic model
delta-wing
shuttle-type vehicle,
which could be scaled with the vehicle
m was
used for most of
the simulations.
surface is dominated by atmospheric
/,7
effects and it
is
desirable to climb out of the atmosphere as soon as'
possible, open-loop
guidance is commonly used in the early phase of a
launch and the targeting initiated only when atmospheric effects are no
longer dominant.
ascent,
gravity-turn trajectory until the atmospheric effects had di-
minished and
at which
and was
this case followed a vertical
The vehicle model in
the
targeting algorithm could be followed.
The altitude
the targeting began could be set to equal any desired value,
typically between 5 and
10 km.
The thrust angle was limited to
±10-degrees, and its maximum allowed rate of change was 2 deg/sec.
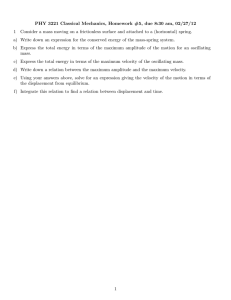
The trajectory
form in
from a sample launch simulation is shown in polar
figure 4-4.
In this
run, targeting was initiated at an alti-
tude of 10 km.
15'
100
20"
25'
SLEO
LEO
30
00'30"
Note:
trajectory altitude scale is
2X actual scale
Figure L 4-4
Sample
Launch Trajectory
~ ~~~~
,.,
,-.--
The
behavior of
the
individual variables is
As soon as targeting begins, 4
js soon as =argeting bgins,
-.
-----
- ------
shown in figure
seconds into the flight,
thrust
u
secondis into =he flight, =he thrust
4-3.
_~~___
____________________________
__
____________
100
80
60
40
20
0
s
II
I
'-targeting
starthrust
I
cutoff
r
!
10
I
-10
I
I
,
100
200
300
400
500
600
700
Time, seconds
Figure 4-5a
Thrust, Thrust Angle vs Time --
Launch to LEO
400
300
200
100
0
Time, seconds
Figure 4-5b
- - - - -
-
-
- - - -
-
-
Altitude vs Time -- -
-
-
- - -
- --
Launch to LEO
- - -
-
800
_~
_ _ _ ~_ _~
_-
__l _ _- - _- -_ - _--_ l_
---- --
__
8000
7000
6000
6ooo
5000
4000
3000
2000
1000
0
200
100
400
300
500
600
700
800
700
800
Time, seconds
Figure 4-5c
100
Velocity vs Time -- Launch to LEO
200
400
300
500
600
Time, seconds
Figure 4-3d
Flight ?aCh Angle
vs Time
--
Launch :=o
L0
angle decreases
value
of -10
at
the maximum'allowed
degrees,
in order
gaining circumferential
strained,
the
initial
to
its
maximum negative
to pitch the vehicle down
velocity.
value,
rate
when
to start
If the thrust angle were not contargeting
began,
would be close to
-80 degrees, since the transfer orbit requires a near-horizontal
path angle at
vehicle
that
altitude.
would pitch
flight
required.
ficient
velocity
flight,
and because
tinue
or
to pitch
sity
for
thrust
quickly and attempt to maintain the low
But,
to
atmospheric
down
since the vehicle does not have suf-
maintain
altitude
drag further
and eventually
constraining
rate of change.
If allowed to proceed unconstrained, the
over very
path angle
so that,
impedes
of
With these contraints,
pitch over only slowly,
in
the
near-horizontal
it,
impact the earth.
the maximum value
-
flight
Hence
thrust
the vehicle is
by the time it
it
would conthe neces-
angle and its
permitted to
approaches a horizontal
flight path, it has left the atmosphere and it has sufficient velocity
to maintain the desired flight path angle.
ted
at
mance
a
lower
since
altitude
the
vehicle
atmosphere because
For
example,
delta-v,
the
than at
would
10 km,
Targeting could be initia-
but with penalties
be required
in
perfor-
to spend more time in
the pitch-over maneuver would be started earlier.
same
run with
targeting
initiated
at 5 km requires a
during the thrusting phase, of approximately 200 m/s more
the run with targeting
higher altitudes
ting delta-v,
than
since,
the
initiated at
10 km.
than
Initiating targeting at
10 km produces only small changes in
the resul-
at 10 km, the vehicle is already above the densest
part of the atmosphere.
The delta-v required
9530 m/s.
If
for launch and LEO insertion for this run is
the rotation of the earth is
included, a bonus of 408 m/s
from a 28.5 degree inclination
down
to 9122 m/s.
launch site
brings the actual delta-v
This compares very well with commonly accepted
launch delta-v requirements of 30,000 ft/sec or 9144 m/s,
that the technique
and shows
performs acceptably well for the difficult problem
of generating a feasible launch trajectory.
CHAPTER 5
Conclusions
The cases studied in
excellent
targeting
the preceding
accuracy and the good performance achievable with
the orbit-fitting targeting technique.
standing of the technique is
be applied,
It
section demonstrate both the
the technique
While, in some cases, an under-
required and appropriate constraints must
is
basically easy to implement and to use.
is ideally suited for use in applications such as design studies and
mission feasibility studies, where reasonable trajectories must be
generated for many different choices of design parameters,
the exact optimum trajectory is not needed.
initial
feasible
trajectory
but where
It also provides a good
for use with gradient-search type optimi-
zation techniques that require such a trajectory as a starting point.
In
addition,
multiple choices
nated set,
methods.
the orbit-fitting
technique can be used to satisfy
of target parameter combinations, not just one desig-
thus making it more flexible than most current targeting
Because
of
any two-dimensional,
its
general nature,
it
two-body spaceflight
target parameters among those discussed.
could be applied
to almost
targeting problem involving
APPENDIX A
Alternative Choices of Target Parameters
A.1
Target Parameters
Altitude, Velocity, and Transfer Angle as
In
this
case
the
unknown
variable
which can be found by using equation
X
=
is
the flight
If the
(2.13).
path angle, 0 2
substitution
c2
(A.1)
Cot -2..
is made for 02, with
2x
sin 2
2
1+x
cosO
2
the result is a quartic in x, of
4
(al-a2)x-
-
bx
2
l-x
2
1+x
(A.2)
2
the form
)x
bx
(a
2(a 1 +a 2 )x" + bx + (a -a)
1
2
l1.2
=
0
(A.3)
where
al I
r2V
a2 =
b
Equation
(A.3)
2
2
r2
(rl coso-
r
(1-coso-)
2rlr2V2
2
sin
used to find A.
(A.4)
(A.5)
(A.6)
can be solved for x by traditional
and then equation (A.i)
)
root finding methods,
Two feasible roots will be
found as solutions
to the quartic, due to the axial summetry of the
hyperbolic locus of velocities at PI.
The smaller angle will corres-
pond to a shorter time of flight from P1 to P2, and should therefore be
selected as the solution.
A.2
Velocity, Flight Path Angle, and Transfer Angle as Target
Parameters
The variable
left
to be found now is
the.radius,
r2
.
Collecting
terms in r2 from equation (2.13) gives a quadratic in r 2 of the form
2
ar
2
+ br
2
+ c = 0
(A.7)
where
a = V2
2
b = rlV
22
2
2
cos 2
cos52 cos(O
c = pr 1 (1-cos)
(A.8)
2 -0)
(A.9)
(A.10)
Equation (A.7) can be solved easily for r 2 with the quadratic equation.
A.3
Altitude, Flight Path Angle, and Transfer Angle as Target
Parameters
This case
leaves the velocity, V 2 , to be found.
Equation
(2.13)
can be solved for V 2 directly, giving
prl(
2
V
2
1
r
cos
r1r 22 cs
2
2
1 -coso)
cos( 2-o) -
2
r 2 cos 2
2
2
(A. 1)
(
APPENDIX B
Alternative Technique for Finding the Required Velocity
The orbit-fitting targeting technique was originally developed by
applying
the
the
Therefore,
the
required
and V
(as developed
the
targeting
set,
city
into
the computer routines for
the
chordal and radial
in section 2.3),
capabilities
(2.13),
the target
signated
guidance technique.
since these
of the
which makes
parameters,
it
is
no
chordal and
it
technique,
possible
regardless
longer
necessary
finding
components,
Vc
components were
in solving the original boundary-value problem.
loping equation
of all
involved
problem as a
in
method implemented
velocity-
essential
ding
boundary-value
orbital
After exten-
however,
and deve-
to determine
the values
of which are used as the deto resolve the required
radial components.
velo-
Instead, it can be found
quite easily, as follows.
The
semi-major
the values
axis
of
the
transfer
for the radius and velocity at
2
2
a
=
-
r2
Since
the
orbit
radius
at
the initial
\
can be found by using
the target point from
-1
-
(B.1)
}a
point is known, V
can be determined
req
from
V
2
req
-- u
2
r
(B.2)
-
a
for a and simplifying gives
Substituting equation (B.1)
2
2p(r
=
V
req
2 -r
)
- V2
r1 r2
2
(B.3)
2
The angular momentum of the transfer orbit, h, is defined as
h = rx
(B.4)
and its magnitude can be found by using values from the target point
h = r2V 2 coso2
(B.5)
Since the angular momentum of an orbit is constant, h can be -used to
find 9, since at the initial point
h
rlV e
1 req
Thus, substituting equation (B.5)
9 = arccos
cos@
(B.6)
for h and solving for 9 gives
r2V 2 Vcos 2
(B.7)
E t req
Equations
~(8.3)
and
(8.7) now give a
8, once r2, V2, and 02 are known.
simple means
for finding V
req
and
APPENDIX C
Spacecraft Equations
The equations
non-rotating
earth,
solving
and
of motion for a
the
including
forces
acting
circumferential
radial
is
Motion
vehicle in
atmospheric
on the vehicle
directions.
direction, F r
of
flight around a
effects,
into
The sum of
can be
components
the force
spherical
found by rein
the
components
radial
in-
the
found to be
Fr = T sin(Cx+)
+ L cosp -
D sing -
Mg
(C.1)
and the sum of the components in the circumferential direction, F , is
.c
F
where T is
the
= T cos(ok+0) - L sing - D coso
the vehicle thrust,
L the
lift,
D the drag,
.(C.2)
M the mass,
local gravitational acceleration, o< the angle of attack,
flight path angle.
g
and 0 the
These equations can be converted to an earth-fixed
reference frame by using the relationships
F
r
where
r
is
the
distance
downrange angle measured
from
=
Fr
-- + r
the
from an
.2
center
initial
(C.3)
of
point.
the
earth,
and
The vehicle
a
is
the
pitch be-
havior can be found by equating the normal components of acceleration
(perpendiculdr
an,
to the velocity),
with the centrifugal acceleration
caused by the vehicle pitching about some point other than its
of mass.
center
The angular pitch rate, 9, is then
a
n
(C.5)
V
where an is
an
L + T sinc(
M
(C.6)
- g cos
The pitch rate seen from the earth-fixed reference frame is then
- =
+
(C.7)
All together, the equations of motion, reduced to first otder, are-
V
r
T sin(o+0) + L coso -
r
1
D sine
- L sine - D coso
T cos(m+)
r
M
r = V
a
-g + r
-2
V
r
-r
2
(C.8)
(C.9)
(C.10)
(C.11)
I
V
L + T sino.
M
- g cos 4-.
(C.12)
(C.13)
where c is
the characteristic
rocket exhaust velocity,
specific impulse and the relation c = Iasp
spg
found from the
APPENDIX D
Thrust Transfers
Tangential
When
flight
performing
path
unit
mass
A
rection.
level
vehicle
generally
of
it
semi-major
found
stopped
from the
to
parameters of
axis
a,
than
the
thrusting.
instantaneous
e,
and
any other
for
Starting
path,
to
orbital
per
di-
any
thrust
from LEO,
while
orbit
the
energy
in
trajectory
flight
to
orbital
thrusting
The parameters
eccentricity
the
continuously
it would
be in if
be monitered --
apogee
ra --
the
can be
following relationships
e
the
desired
GEO radius,
allowed
to
vehicle
=
hicle must circularize
-1
a
1
rV
-
= a
(1 +
reaches
rGEO,
the
2
(D.1)
2 2
2
r
coast
transfer
its
a. (2
Whenever
does
in
following this principal.
tangentially
the
tangentially
increase
LEO to GEO
found by
thrusting
greater
expended
near-optimum
thrusts
suddenly
produces a
propellant
can be
monitering
maneuvers,
orbital
the
the
engines
ramainder
of
its
requiring
oroit,
the
cos
2
p
(D.2)
e)
(D.3)
point
where
can
be shut
way
to rGEO.
a
delta-v
ra is
off
and
equal
the
the vehicle
At apogee
equal
to
the ve-
to the
difference
between GEO circular velocity,
VGEO,
and the transfer orbit
apogee velocity, Va, found from
aa
The delta-v
required for circularization,
AV
,
is thus
c
The delta-v required
AV
c
= V
GEO
for the thrusting phase of the transfer,
Vt,
-
V .
a
can
be found from the rocket equation
V
= t
where M
f
is
launch mass.
c
n
--
(D.5)
0
the vehicle mass at engine cutoff,
and M
o
is
its
initial
The total delta-v required for a tangential thrust LEO to
GEO transfer is therefore
AVtotal - dVt + AV
totalc
(D.6)
APPENDIX E
Samole Traiectories
E.1
T
LEO to GEO Transfer
armetee
Smace4S<zt
to GEO transfer
LEO
with thrust/M0C0.03 9.
7hrust=
7355.0 N,
Sr.e+
0.0 m^2,
AlckaMax= 25.0 ces,
TargetH= 35863.0 Km,
V
t
0.0
7684.5
Starting targeting
100.0
200.0
300.0
400. 0
700. 0
800.0
1000.0
:100.0
z 0 0
1200.0
1300
.0
1.00.0
4600
.0
1900.0
2200. 0
2300.0
20C. 0
2500. 0
2600.0
27300.
2900.0
3000. 0
3100.0
32w.2
3500.0
7713.9
7742.8
7770.6
7796.3
7819.4.
7839.2
7855.1
7866. 6
7873.3
7874 .5
7871.0
7861.6
7866.6
7526.2
7500 .5
7769. E
773a. 3
7694.5
7650.8
7603.7
7553.5
7500.5
7446.1
73589.
7332. 2
7273. 9
7215.2
7156.3
7097.7
7039 .5
6982.0
925 .5
:762.7
r-ajectcvy
,1 4500.0 m/s,
"0= 25000.0 kq,
hstarr=
0.0 kmi
Ot= 20.0 se:
AlpiOatMax=360.0 deg/sec
TargetV= 2110.0 m/s
k
372.000
=hi
iama
VG
0.000
0.000
0.00
.019
.088
.206
.372
6.535
13.095
:9.677
26. 250
32.398
39. 526
0. 00
0.00
M+uel= 24000.0
ks
Thkr ust
Oe I taV
0.00
100.000
0.00
0.00
100.000
100.000
100.000
29.52
59. 23
89. 14
119.25
:L9.56
185.0
ai=a
now.
372.074
372.746
374. 689
378.562
385.009
394 . 663
4E .031
.35
1.127
425. 699
448. 107
475.650
508.653
547 .362
591.969
2. 199
2. 608
3. 035
3.&75
3. 923
4.376
4..29
642. 505
699. 069
761.530
E29.834
5.279
903. 790
5.721
983.180
6.154
1067.766
6.574
I157.203
6.9-0
1251 .242
7. 370
1349. 42
7.7463
1451.774
5. 097
1557. 1&
.433
1666.740
8.750
9. 0. 9
1778.41
1593.622
9.330
2010.804
9. 594
2130.127
2251.354
:0.071
374 . 267
10.258
:0.491
262751.
6
0751.257
:0. 61
0 .00
0.00
0.00
0.00
46.157
52. 781
.9. 399
65.992
72.552
79.071
e5.339
91 .94
0.00
0.00
0. 00
0.00
0.00
100. 000
100. 000
100. 000
100.000
-. C
0.00
0 .00
3.30
C.-C
100.000
:00.000
100. 00
0.00
:1n . 20
:10.703
116. 777
122.750
125.616
:3&.373
0.00
0.00
n
120 .0
00. 000
100 .000
100
000
100.000
166.494
0.
Cc
l.1.00
0
0.30
176.277
181..002
155.619
:90.132
2:3.'.68
0 00
1.00
0.30
0.00
60
100. 000
100.
100.
00
00. 000
000
573. 99
909 . 56
946.02
92. 47
1019.22
1056.27
0 . 000
-.
0 00
0.00
0.00
630 .
100.000
0.00
C-c
356.253
97. 21
530.19
563.4
596.88
664.57
698.51
733. 30
768.06
803.10
0-0
140.017
130.958
241.74
272 .89
30C. Z
335.55
367 .66
399.70
431.97
100.000
1293.03
1169.29
0.
II
-0
i
i
N
F- D (DW
4
LI
-O --0 L LI
L LI
-L -O L
I
EL
L IC-- -L I
I
N
I-'
--
N"
iL) E
I
D
I
:I
I FL -ON
(1
. .
-
i
-
I
D -
-
I
LI
-
(40-
-A -oa
L"
I
I "
- -0 -O
....
. L. (.
- L li
-
L
I LI
Il
I
Ul
Fp
-4
F (D
- P|
- k- &-- N N N (4l (
4-- W
-O
L
ILIL
I) I
LaI
r
L I
I
(
-
(
01
-
1. (1JLI (
I
t
GI
(4 0-
3DU)E(D 4
(.4
l(
U-
Ai
-
- aO (J
-
(
Li -1 ti IJ -b (-
F-
#Z(4, -0
(4(
01 F
Al -0 41 -0
(04
L.1
j -
(4 (A(4
I
( (t
L
r_
L
ai
1(tA 4(1(
- 01
u
L
(4(.
(4J
N
(Di
- 0- 0- ED W 0
J 0L]
) I]U
L
N" N N
CI 0
'
'
-1 -0 -0 .0 -44
1
I
I- - v
(
O140:3
-0a
l (3W
I-
-, IJ N
0IN
"0
N
i- O
- (Y- 0--
F F F F-F F-F-
-
)-
1(I
D 0
-(
-
NN 0
A
N
-
(4
W
((A4
0-
4(4
10-
] (AJ
U--LiLi(I ILL
I
-
N
N
J F-
(
N
) N
0
N
4
N
N
N
N
F--Al(Al(
F(- F-
NN N
F-
W
(4
I
)
r-"
I
_
(tIn
1
-
t-
- -A
N F- (04
"N "
LJ
(4 -3 ut L
N
_- 1
r
I
0
N
N
N
N
N
- 0-
N N
)N
.(...NN.N.Nl--
N
j W v
r--
"
ri
L 0 L
t : LL4 1
"
44'
-
-4
0
N
ED E3 C)
__Ci a
4-CD01 N
a -1 3
0
-a
N
N
0- (A(1
N
-a L
-N
N N - J-I
(J-N -00(nt-
N
1j
E
-
tli L
l
1 0- W &- -6 (4 LI
N
1 01 I
F- P- F- (1
W
4
4
A(A3
L"I (A4
N
-0 LI
W
-0 -0 01 W Wa
0)
0 11
N8 a
-4(1
01 (4
WD-0
(A U,
ti0
- -
(I I CD
D
N
0 N
W
I- I-
LIL
LILILILI4
L
L
L
II
I
II
i LI LI3ILILI LI LI-'L D" A C
L M Lr-I L LI LI LI LM LI LI
r
LI Q-I I--U
E31 C3rC Ur 1- C0
r0
n El U3-C0I
FC
FNM- N
LILILI
It-I I- LJ
LI-ILIbCILI Ii
1 1 - F- (- ULV)A1
--
-I I -I- -I Ia'-I LILILILILILILILiiLi
N -0 N N N 4 (U"- (40
Li I
L U-CL I L.I
A
LI0LLI
I- U-1[ 1 I I LI LI I Li L L i L4;I L.-I
0(C FA
F
1- LI LI LI LI L LI LI LI LI L LI LI LI M i I
I LI LI ILILILILILI 3 LI
a) -- JI I l(114
N
(f4 N (
CL N
I-
4
ao
-
"
"
tAJ
10
Ul
N
p
F)
- -O (44 I- 0- LI 01 -O F- L F - D (4 01W(41
F -O F -)o 01
L I- 0- N D (4
-0
01 LI 0 - N 0i
F- LI 0-0 -O
-0 0 01
ED
010
10-401 01
01 -0
(44
I-A
4
IED
- N -04 - 0i F- F
- -Ff
0 4
I LI 0 a
0) ED
00(4
-LI
-0o -a-I
(A1
-41 (4 4 (4 -O 0- (A.
-- 001 -a -O
N Ut
) 1 - (1 -0 F- -0 0
-" -41 (i I 0- N 4 (4 (Ii (4 0 F V ( . i 0- -O -- i 0- LI
0 N (4 L F- (A
4 -0 IM
-I
- -0 (4A-" E1(40- F- 0- N ( 01-)A Ll 0LI- F (.401
o
No ul oN N
1
I
N
tl1ut
-
t\)
I. r to
( C- -
(Aw
f-I N
F LI
-4I V,
F0LI LIC
F-(A
(l -O
N 0- F- F-Nf3DOCICICIC
F-I
o DOCIOOLICI
000l
P~ao
P -04 - ttt- 0 (40 N 010ratil1\lf
a raO0- 0UI
) Q~oO 9 Oa
~l
LIODODDo
arIn1
wa~Ct
I3h
a 9
DOODCIDD
QtN
mo M
wPONDOD
ODODOOD
hulcna
woDOOODOOOOODL1000000000000t ws Na pN
N
0-N
a- 014(
urtD
- 1 )
a
N
-4 LIC3D (4 (4 -
N Li
F N N F 4
II
N WJ
V #-F i0 - - 401
- ED
O a
N 4 (4 -O F- LI 4 N -- -
o- N
0-
j o- F- 0- F ID
0-
-
- Or- -A
L3I
3
. at-0. F. LI
. a- .
M (i
0 N
8- , LI
LI I)
Lw
I I
4 -8
-0 16a1 0
0-L LI
LIa-A
0 0 -'E
(4
--L
4 0- 0- "1
N it_ D1-4 F- -'40 -0 011 t 1 - m 1-,
0I
-al
N (40- -001 0- -'0tit FP -
(1D 4 4
1 -J - 0- 6- - I 1:11 I3 L L I
-a ) -- 00 0
-4In 1, -O
F- a
LI
10t(Al0 4V" N L it1 h n
CA
-
-r'0-U-
VI -I
LI LI LI Li LI
-I LI LI LI LI4L
LI LI
( t:)
N
l L
I 1-_-
LIL
A
-I J01 -j (.4N
N N F L
6 (11 C3 a-
L a ,I-
(A
N F- (40- F- F- 4 0- ut (
0 1 In L -0 4 -0010- 41 4 LIn
N
~ PNeM(A>dJg
hilbD(t~t
hi-raaa1Nxi
1 C N 1 1 44DHO
t
aO
a(i)
(M(JtwD
LUW
-(l
C 3W
00 -WNVBUmr Ia
o
ctPN
ANN
I\IN
-U
a-
,(A
- (11
L3
N N
N- N N
It 01 01 F- F - F- F- (4 (4 (4(4 ((A (4N "to VF N
0
0N
"Ft61) 1 l -0 -4 0- - W t-, --j
W(4(1
t
F ( (A
-
a--C - -O
( (1C0O'
LiE (i
(' 0
(l LI -0 1
C 0) (.4 (l
A -1 1
1
D1-O
LI O- 401 F- t C- -4 N ]L I
I -4
0-N CD " N -O I-E 01
it F- 0-
t,
L1
i A (LI
IC
(i
Ii il
LI
Li
J LIrL
- 4- LI 0
0- 0- 0A-a- 4
40
1 -1
4 4 (i (It -a -,0 OA)Li
U-i LI
M a-- N (4 4-1 LI
I
-1 (
(AC
ILA F-3 W "
Ca 1- Li
PPCI
m-
(,D U U
l
ill iL 1 4_Li ( )
1 ill (I 0- 0- 0- 0-
(it lI Li (ft - 4.AN
tv
F-
-AN- - 11--11Fl
I-
- (t it01(
-0- - 0-1 0tI(4 \3a
9- -,A 0i
i
' I
O -L)
1(Al ( 1
J0
(
F-
0iO-O(
W - - -0
. V
FC
LI
(1 A
I. (U (it l A (4
G.1*-"-4
-- U (1
I
(1
LU L N U (4
p
N 4 "
Ii
a"
- 0- 0r- 0- -O0
-4 -0 -1) -0 LI lN a1 -j i- P- ED -0 " I (401
L I L3 L 1
N o 0- (i 00
()(il
t3 (- LI LD
"
L lI LI I I L L I1 Il t I
)I
L
(4 F P' Et 0P
I
I I
-. 0. .4 - . (. 0. N
. .
. F. 4
. . 0. 4-
"-
NFN - -
k- P-
L
I- LI.4I I C
C) LI
LI
M
l
L' L
L LI (I
LI
-LJI
l
-CD
-
L
N J-- L
F
IL
Ol
1 -4) -)
I
0- 4 1: P LI C) N C
01
-4010D -O L
0
I LI
Cl Li
LI LI LI " li-LI
-,, -4 (1ED 01 1010 0
L I LI
)
I- ,L LI
LIi
-A
I
N 4 N
" LI 41 -O N -3 -
D
-A 4
I
I
-O
. .F O -04
. . . .e
. (it
. 01
. .( .-O 4
. LI
. . -4
.-IL
. .4 F
. 4
. L
. L. 0
. 4
. .F 4
. 4
(4t
L
I -I-I
LI -O -1D
(M0- o- -A -A 01 01 ED (i
i Ll
I
F 0- -O N Ut -0(A -A W 0 'L
.3 . D.- Ut
. CU
. .-4 ND
. 4. (I
.
1I\)N (
IL I
LI LI LI
1
(j
A (4i
1 i -A 0]D Cl 0 [ -L
0 u -j [I 1 (itrii (1
p IN P v v P, v,
L3 -1C"
41- -8
1 -1 -0
ED ( 0 I D
- - -j
I.,
i it1V v - V P W 61 (A
l" N
1)N k1M
- -^ l'
- A (), (j] (1 N
tp-w N C.
I.- C: 0]) j 0
N C)I E.V
V- W
1,
- - 0 0- ti(
(1) (A11,
- 13 01 Or- P (_t b. -4 03[
V N"
.11
[0(
IA
", - - - (11
J t\1
C* -. -, (t,CI 1)a
tt
0'"
I- - 34
LI 0- ( -0A0-F
(40 - I)Ill
FUt -4
- -(t LI F- - F- CL
0 Li1(
pF -.
tl (4
I0 01
1 -L
IN
V) -0N\
, - (11
O V a- -J ( l
-O
a
4
I
0
,I
N
" L
C LI a - F - 4 - ' a L 0- 01 0 - -0
-0
- ((1
-0 F M -O
4 D
0
( F- ,I 1I
F E N
FL 0 , ,W 0
. .(4 .D .0 .-' .D . .
S4iD(I
. . N
L Lj
L
N NLA"I-"
(A (A V F Ut
41 i
-j
LI
-
a-- L1)0- P0B LI ItP
0
L (II
"I -i--
-1 01 ()
-
C i) L
l LI L
(UI
LI 1*I L
LI l
f
p1
> (l
I.)
a C3
aU.
i--*
-Ac
0-
LI L
LI
-0 w
O Li
L
LII 4
-, a
-a
l'-J 0.-
0 (110
(Aa a
CI
441 >CA IA
LI
e_- LI
CA rn
CaO ooa a O (-u .I L
N
a-,
O-
>
-
uIa a
LI
uI
a a Oa a LIa oaa Cl
ma " LI
O
0000
-O0C
aa
-
-0
Qa uO
a 0a a
1 -OD
;-
'6 (1)
l
03
-Itk-
tj
,D
i
LI L L
- i)
I
(j) [.I (
ICl(
G
lI
N
c
(010
1.
U (
L-
(P
"i -l
U- 0-
-
-l 1) C
-
E
M
-A
()I -
N
"
*-
-
LAIi-
Q
-
lN
11-
D
(,I(.At
ClI
I
Pl &
W
CI
v
(A
-
0-
U
N
w Ca
V-
N
l
l
-
N
M1
(I (
In
nl
UI
N
N
nl Ul01Mn lal
Al(il
El
I.1 IJ
(b0
i-r C- LI U) F (4 (A
I- UP -4
,1 (4
(i
411
(ElNll
(11 (
it
11l
N1 N
.-
i
N
(11 il l41
NN
N
NN
1
:a
-o'1-
-a -
k----"
a-0D
-o N 4-
N'I
0
-
- F,4
I .
-
4> 0- -j
t
t
-0
-
N
-
(
-
A4 CI
(
0-
--. 1*1104*,a01
'A
ID
I
II.->
a--
W -0 a
--a-
1
-
u,
E
U
-0
-
tI
II
M
A
v
(
4
0 0- aE EI
E- --M
--
UI
(i
4
I-- I-*
0
--
-
N(W
N
4(I(I1
j
( 1 C
01 -,
--
a"
P
0 i "-
0
-
)
-
>
-0
CA
(.
p
a
-
a
-O
) 0,4 "
ul
01
- 1
-0
L
4>
P -
UV
-4 - 0
-A
(41l
M
-0 -0
M
I 01
P- P
-4 -.
N
c
1
l iq
i>l
-
(
--
-
"
-
I0-
j
>-P>
- -0- P
U
C
I
-A
f N
-J
P>
4>
-0
P
U
L
LU
-
0
(4
4>c-
0-
v (la-
El 1) 1,0
0-
-f>
(.D
11 0
--
N
-01 -1 u1 N
to
(-
( I
(
IU
U(11
3 U-0
l
Or- -
L
-J
O1(A
-4 0- 0-
P>
>-0
P> -0
4 -0
P> - - - 4>
4
-0i P>
(J
1-
C3
EQ
-" 01
4
" P
V
I- V- I-
-4cC
1
0
-'
p
- I0
W N
-41 3
(3
(4.-A
-a -a C 01 0- (401
OA(A(A(4COACI(DC
V-. -4 "
- J
0-
(11v
LI
.
OI
I
U3-0 -01
Or- 01 U, (
E
C
P
i
0- ctn-Na-0
l
W (
a"
N
0- -.4)
".01 r-
nEl
0
El "
-1 -A -
>I
P
W
El 0
1 l)
LI l
P P
r-N
0. - CA c
U
t
0
NN 0- (4 P ( -
00
O
N
"
- -- .j
W
N 091Ua
D El 3N (44
A P-
- -4
"j
(.-.
PV -
("-
01-a
Ul UI (
> Pl-0
a -
1.4
-
P
L L L
(4(4(4(e(
s
-J
>0-
4 01--
" --
C 1-J
0D
01
-
101OD OD0)
(444-0vC
(CD A
0 1)
M
-
-
EWl
El
1 UU
-401 -0EM-a
L
01
a-
-. I-
4> -001 El P> N
1I
Ca _OWll1pl
-4-03
D0
0N (
0-
01 -
LLI
I
L
((4 W (A(
N(1
01 -
LI
I L
GN (4(4
N
El 0- 0- -
1-
C
1 ID
03 fb G I
-
"--
" Or
[''N
-'N
- -0 0- N
El 0l El
0 E3
M
*
U I- i -t- r0- o
-0O-Lt
1
0P W
-j U
"-U
N -00-
a v
4
4;,
D -,J 0-
a
a O
oo M
0a a
0i
#Ii
a
0- () U) 0
W
INVP
aa i
.E N
- V- M
((4(4.- C3 (A 0 aCO
W W
4W(44(
(4( W
El 0I4P
I C)
M El
0
4>
>-0P>- P,
- 4 - P4 -aP>
4>1 P>-4P.
-> , -041-a
(
-*1
(
(4
0
l'- I,- a- I,-
W(
-. (111 fl
k-
E i C3 E
FI
4
- ,-j -I -j
0, A
3 0
- 4 -P,
I0-
-
0-
PP
(4 N (11(40- p -
P
V
P
a a 0a a 0a
-,0 .
P
4
f p
N N E 01 4 0- GI
C1)'(EC*(A0tIDI
1 Ul (11 C- (O I (II u
a .1E
LI LI3
-
01
(11
l El
i 01 to
aD --
1
.j0-
UlU
L LIA
L C
N
" NA
N
N N N
01 -
N
-0 -
aN
0- to 0- 0- -0AP
W
0 -j
(
(4 El N -41El -
-0010
"
-j 00- ( 1>
N'- k E P r-a -- (-CD -CAI
0 - 1-11- b- El l-la
- r P NO
--i a- EM (
01 ll
p01CD (itl
(
-0 1- (11
(4I 0301
-D Ita-a 0
.N--N
CD LI
J(I
01
L El
L
(11
El (I11 tip0(1 (P
-,jC41 )
-
-0 -
4,0-
"
I0-(o- (AD-0 CA (A
-4 -
Nl
I ,-- 1- 1-
4>
f- [BCD PCN
t-
(t
a- NA(001 Na
w
l
aOO
a CE
a a a a a a
-,1 0-
r ,
j N N " t' ri
r-N
N
N N i i
L
-4
-O
4 D
D0
"E
- c)
l M
(1 o- P " 1:3 (1) 0El -A (in CA " -0
-014WN
l 0
C
NN
(A(((
NNu t-l
-) 01 0-
-k
a) P ODal-G (a
i
N
"
ra
0- p
>-4- (
N
M M "l
E3
4
N N
"- -
m01
lI0EA-A
l
NtN
010- O
L3 EJi
N
N
N
-
-4 -0 -B -0 -0
N
b-
1- 0-EC f-
ID EL4 t -
CII 0- (1
1
-
0- -01 I
k-
-A CA P>-(10I- a
IIlIU "
N N
1
(11 c l F0 El
(I (I (11
101 l Ul
I r(1l ci
l Ill
El 1 0l cI01 li 01 i0lt
-I4 It I
014
( 4 N
-.4 1- UI 01 0-- 011C31- IN
.
L (1i
1Il
Ci
En
D
-0 -4
j -.-AIIa40E0103CA
a
I
N
LI -
"I Ul (D i(r
0- 01
-
b-
1 0- 4> -0
UICC1 0(D
-a
-
0- 4, W - ( 1 l
E3
E CA
I Cl
El C.I E-
--C
D0-
l
N
(110u- al1(4 N mi
(
a o
)
1l0
r-0-03
I-1r
N
( W
vF-4
03
- -80L 0-oaaaa
N 0- a 4>
VD
a(40- a ( -.J a 91
-j a N (1101a1- p - a (40- -0(G001
(4& A
a a a- -41 " V> -4
a 0aW
-0- 1 0-0CO> P>1 0 -.4
$
(A
--
(A4 W W W W W
4W 4( W W W(4W(4W(4W W W W
0--0I l ZI
'i4 *p * l
(4C (A (A (
LIU[a
LJI f I11
N
f\)
l
-a (D -O P N
- I E3 N N
CD (4 -4 -0 -a 0 0- ND -,
(11 (N
.E11 0 U
CA I.4A --,A (A1 (I)I
1 td
J>
0L
L
0
I LI
N NW ' N
l -
3
D -
U
L4
1 1
E3 0
CI
-
N
N
I'A
' 13 h) VI
i'l il N t I N i- N
I- N
t
V P> 84> P CA
(
G C 4(
4. N N N
j1
J 0F"
'l --. U1 W " - D-l4 E A
E - (1
N 0- N
-4 P 0- IN -A a--L
l -4
t-
O- W U- "I C11 U- (itJ
an-)
b
0,
I LI IUL-LLIC
-- -
-(1 w LA 1\
l
L LIU
-
I
-4 0- 01 0- -0a
- U3CI0- (D
LI U- LI
(A N"01
a13
C
-lEl 0
(A
C(A(4W 6(W 4
Il
l E M
-o
01
-,
MEl3l E
-0 N\
P 0"- -1 1a-
06-NJ
-b- -a-C
a
I O- -,J -
a-
l Ci
W 17
C
-
Ua--.- ,--
' I
0 LI U3 C I
I CD 4> 0- (4- (40- -4 to -a
N01
i k-1
N
40-
P-
IDN
El
Cl
- -0 -41V
N N N)
N N\ IA N (
0--0
E l
-0 ---
1 -L)
-
-1 -0 1
(4 1-01
--
N
0F -04>
V
N 4>
CACD -A 0(11 0-I -A
CAID
w71 -. CAN
1A CA I. (1faI* -J El
: C
: L1f0
- tN v0) E3
, I0- fO
O
" 0- -A4
0-0-41 0- It
N
I,
0
u
IL
-
(1
N
i--: s-
0-01
ib
O0l-n-
(0I
i
(a
1
El m-,:- El
-t
(13 ID-
I NII
VI EU01, "
-I
(.1
-1N
(1
IN
la,0N a) 0I3 - U3 IA
D,
-A N -4301 -I)(4IE 0-
rJ 13N iJ i
r i
I\i'i
N
" Ii\i i3
I'll i. N
i i. i
S N
I\
I1 P
0-0- 1 1 (D -J,1-. j
-.1 -A -4 -A 0- 0- 0- 00
- -- ,1 (I1 CP
1 -1
P- I\ 3
ca_t .0 -4
O l G,lN
c
l1U-3-(0
-CD
-0 N
li
4> -4 W I- ()l a 0" 1 1
"
N 4> 0- 0- P> v, 0- El 4 P (-A
-,1 Ill N (I N C 0-0- (II N
Ui P->
(11 3
I 1)(
I- 0-
(I
ii
1- a
Ela aaa Ia ;
PI- G , N
C(4 CA 4I( (w
(
W
(( 4(4
(WC W
C( 4
( W W (4
(4
I
N i i N N1 W I
(A I
(
( 4 (4W ((1 CA(
- Pp
U11 00--JDU0( r0-((I.
N (AA G(P,4 -O -O -0 -0 - a 3ElZWL0LMI3l-l-NN-N'N
4>
-0 N rL i- (A1I 0- CO 1 - (41 1 (- C) a N P a- UD -O -- CA CA- -o N 4> 0- 01 a N Ul -j -6 N V, a- -0O- PO1 "
NV 03 #0 a N I 0
W
a (400C
AN0-i a
- a 0C
(D
D -o
0- "a
a -1 1- N -o J (11a N P-a
-(1
) 1 t-A -
LiLICA
a CA
a
a"I
(
'
.
0
or-
1 N
(A
l
-
-A
F-- (
(
a
I
IA
V-F
-
00 0 000
l El El El 0 El Ill M 00l El
0
000
000
l)I 0 Ql El
El "
El U El
0 C) El
0 " IEl
00 L00 I lEl
0 El
00 El El El El
00 El
0
00
00
0000
3 El1
El El El
00 El El
0
00
0000
"
I-
1 0-
e.,oneg~e
0-t
b- 0
F- F- (I iII
-
F-
1180
Li L
C tW
4
E
.I [_I
11
1)-i A Us W
tit
l
(110
(f
',O I" ;L-
ElIEl
1ii
(
11
I I1
Ll
t
13I
U
"ti-In
F-- 1 4l
M
mlD4
0 0
P
4
O
j
D
P
D "
.
.
.
.
IN) .
Nl
M
0
( (A(A(A
" I- - "
V (AN
N
LI l
N 1- (1 El
N W l
a 0
O
-E
.
.
(
.
F- F F
1-1 .
V
0- a]1
W
v
lNa
"
t 1 0(A -
P
.
.
P
r') "
P90(P4
0N
"
L 0l
"
b-
RkI P-
1\) .
00
P
-41
I_
>
F-
-< F-
(0
i ii
i-QO0
C4
i
(I 0I (0I
i
Li
EL
-A tn"
C
L-L L
Li
vi rFL,,
t
IL.) F:
L
JICI I
,.
(r1
-(
F01
i
V(-
LII
01NV
Li
1:1 #-
Lii
A-j
O- - F
a'(A V- -,,\lb"i #
(I)
tit -A 03 " G14A
(1-4(31-cl v--) "4o
-- -LI
-I
(it A 0r &-
I L
L3 l
icL
-13
LL1
En
L
V Or-FO-
a
- 0
I
(1UIf-
Li
La
i LI
i
rLt
Li
L 1E1 L L
cl
-A
l E ii
CI
(11(11 (
O-
k
ir
.
.
"
-
I.-
"
k
F--P--F-F
-,JI
0-
J
J
6i-F
0)v
-,'CD I "
40
IJ
(0 IN0
)o
"
O
P
-A i
lC
N
F--i-- L(4
W
L
1
44(4
W GJ
Utl
0 (I1
0
- 13 )L-
N -(
l
cl
Cl
- F- F-I- I
lOl
G(
U l(
El
I
LI E
akP_
W
CD
N
-
I.
"
4
E
Li E
E
L
.
1\1 "
U
P
I,-
I-
&I P
F- GI (4(4
"
P_ P, 1f-F-
U-, l'
l i
-
W1--
I1 Ln
U-F-ElQ
FV
N
-L
"0L-,,CLI-.
F-
E
E
(-003
El40L0
El E
0
U
-1ElN
-1j ID 0
)
l LI LI"1
(D f
-0 (1
01
lnI
l i 0
Wt
(
on
l
t Elt
W
l El l
(w(
O
En
(P (Al
3
E
0 1GCLo(-WCN W-P
Cil I E
4Ii(A4 (J
L
4
.
cl
Usl
n
(A
E
(A I.Cl W (A 4J(4444(a
(l
Al(
W GJ(L
(4(41(l
0 0
U 01
t
0 0 0 103 1
0o1 0l01 0 1o 03
li El IE
F-( t (
il
LI 11
C1 sp
.
W A -0 to &- Wn
0-L
-J -A D- 0- L03033l
k-
.
P0
.
-A -41N
.
- 4-0 A'
.
ma
-
a- fir
0-
- 0- 0- r0-- F- F F- F
t,, "% (11('- " to to (1I
(,jto
F - F
) L
-LO-CU0-
- FFa- (
- -A i
1L
"F Ol-CQ0-,
t0
01 (i
U Ol
i
031
U
" Cl 3
CIllC)O
FP
- - F- I- FT -
t
Or
,
rll
L
0a- 1kIl-
(A
L) E
- ) (I f-
[
11I. I:L
-
-
3 L
(
CLl(4FF-(0I0-Ci-A
-0- o - I
P #-L 0Irl
I
L
Ei
r- 0- O-" 0- WF
CD Oi
W rn 0-
U I)
0- GL N IPCCa)LI)LU
a0
LAI
-A
It
O #-
F0-
L1 L
0 to (C-0
Aaa- - j Ia, 0
) -,J0"-N
i
0( -1) AC)
"'
L
01(FN-,tFNv
F-
-a,
a
L
R
N N N N N N N N N N
-4 -O -4 -a -a CDu]
0-t
P WF- E -0 4
-k-W El -4 P- " -4
VA so -J -O CD UL G4 -0
- -- j~ ul "
-(4
D -A
(to
.
F-PF- F
tW
0)IVIIN
0
F-VFvv
P
-
-0(-
V. I-
j
F-V-
-AC 01 Co 03 (D -j
C4-)C- 0- (At0
(A
.
F- F- t3 0n 03 0
.
N
(
F-l (AF- El a -0
P
N 3 (1) U- FC3 N N N l-
El Cl E3 Q -a -a -
..................
R (4 FRinPMs--
l-
( (4(4l W 1 (.4
(A
0 n E El E
-0(1"
a) -J
-o -4 1k 0 (A
l) 0- N1k-
4 tN-AfQ"V-1DlrFIC 1J LcDl1N
P 0-
N N N ( w ("(u
0 ti -FtoL
P
N
M
tit ID
W-0 U0)-
(11
01 1
f--4-F-F1- "4V -0)--4
-a 1 M 64
-41 (At n
I--I
( CA
WN- P
(A G( G(4(61W 1I
W W
((A
(.1 1(W
(4 ( ((41W (A.W((44(144(J
4
(1
G4(44(W W
W
ol
( iii t (t 4o1Uitt (11 (11 0o 0o ii Iso (i (PII (I ( P (II 03 ( 03 0 01
01 Us l t (it
3l03(si 030 (i
c
lJ
E E ) l l I Il
El C C)
-l
I
1 LI
n
I ft
i l
C
lJ
C O
El
O cIl lcl
il
cl
El
il
p
1 to UI
(ltn(t U1 0oUI
(1 ( II (I It (11 (1 (Ii1 I1l F- - FfF- F- F- I- - F- F FI -
E AF- (
WV-
I Li LI
" C0
-4
El
A
-A- -I -J so in -1 - -( o M -0 P
IOII LIi
L-1 F(D
III Li
El 3 El3
00
CD - ca
-A
-a L.1 t t L. -8
-4
1j to
-0 r') " (is Q in -A to-4
C
a
0 ao
d
-INF41-F--0(403(4-41N1-4-4m-DN-NWFEl3-0341l-J-0)
0
-A
03 -A
LO
- -1 (A -0
.n 0ka 4O
F- om - k (AU (A L U LI El
F- -J (A 0 CD CD -O 0)
oNM
NN
ah -0
m
0 01 (
El El
C
El l El
M
El El El E El El)
Q 1
l LI3
171 " El LI El El LI El El El El 3 El El El M El El El
M El
tP
-El
C4
4 (AW
W
A(A 14 W 4
NN N N N .N
.- - *to
3n P G
- LI) -") 01
W
(-Ut
E - - "N N G ((A
W4
N
ElC3
-A N -A El N
N N El 1
0-
I...............................................
a(4)04 &D
F- F-F-Vp--F-F-F-F-P-FF-F
p-FVF-F-F-FF
P
v V v
-F-F-FF-F--F-F-F-F- PF
F
P P V P, P, V v
(4(4C4hadl.444A(4(A((4GANNNN1INNNNNNNNNNNNNNNNNNNNNNNNN-FI-F-FF--,-.FF--F--I.F---.F
W GW
I (.1 ( .1 A
(AW C4GW GWW
I r~J"
J t I . . . . . . . . . . . N . . . . . . (A UJ
N
F F- (
(
t-El El LI -) (13 (1 ED
C -A -A -A - k- L030303 F- F
AACAN \1 4' )
-
0
wO IN)vm
D
(A G U ( 4(
N
N NN
-4
-4
J03
F 01 (D -4
E ut -0 " N
- -O
mm
.,sa-pbr,-..NNNNNNNNNNNNNNNNNNNNNNNNNNNNNNNNNNNNNNNNNN
t &
*r # . k- V_ 6- 1- 1- &. #_ 1'
N . . . . . .
A -.1 -A CD (1) 1 () -0 -4)I -41 - 0 U LC M L I- - I- I.-
- -0 -F- -- 0--4Nt
0- 0-W--
F- -A _t) N Uti iIJ(Al
-
01kff- W
F- - 0- -a -4 --a (L1k- cl -OU0uDINFaaa~oaN(00444o~
El El
cl LI LI
C)
0 L LI
El
0
Ill
-4-6
-A "~ Ul W v CA 61 v tA Oj o.) () W in
00-INILL-CUiF-OJNIIICCDIN
,E
,n
it -O -0 -A JA (4
(a El El M El 171LI El
a-
W
(Aid
(A (_4 (4
G( (A(AW W(4 4
F- (AIN o- ts
N F- La0 cD N
(3 0) -0 -0 -A -
N
N -41 L- WL1- -A
Li -IF (-iut N-0(itN -41u- tL -011Ckt
0- C4"Il(W4Cl(A C0- W -Go-Fo
(
--A -UCJ
(A 0- 4-1--F
1) P, C3l - " 01 PSl- F-- (A (
AN
-003
M -1 CL t (4
W O- 134to GI
CDIsI (A 1- 0) (P
-00
N
Ns
F-El 0- N -4 N -I N -41
U 01 1- 4k- CDU s0- ElFPD
0 CL
)
G.F1P00- N C) O- N -A LF-0- -,j -A-UIN-1F-C
D k
A- GI
-O 1" -,
P-FU(A
V-F-W1
UI 4 n P
WlF--4 Us0t-3F0
M(,cD N N
N11
(A -40
toF-()(A-
,t
W
I-
--
W(1W (4(.1
(A CjWAA (4
F- F-F (( W (
I0El -a )03 -] -I kiL -0 W (- 0 (A L -4 N 03
-A W n) N - (II 03 Fv-
-F F-
(A(4(
AG
U
- El
-4 N
.........................
D~~~~tN444PPDP~rNW~~mgrNP4(U
- FF- P, -4 L (
(A
L (i N -0--
&4eMNG
Ul3F-tFmN
1 (4 1(.1 (AW W (At414
(tit (il(i ( 03
/I0o ( (1
U
I-I (.4
o-
F-
-A
(in - U.) C3 0 0- P- -0 0- (A C3 -A GI -4 W 1A _j (At t0
sCt 4 -4 (A 0I
a 0)ir-o
w
C)
-
1)
- (13 It
Ll Lj
F v
(t
i
SU-
0
I I Li L
i
a- 0-
Ii i
so f
011
0- "
icl 0-- -
1
-O
#1(J
(3
&-
-( 0 0i-.i-- C F- -4
(4AW (I
UOala
LI
El
"QLI aolaao
E
Lij ul LA El
ODaaoOO
na LI
0Oa1000
IF
(AN
E0 -0 C) -4 &
E3
l
El El
l
Ml
El
0
0 C0 0 0
N N\ N N NJ N N N N N3 N N3 N N N N3 N N N N N N N3 N N N N N\ N N N N N N3 N NJ N N N N N N N N N N N3 N N N N N N N N3 N N N N
N (iNN
N (4 N 1 N N N UJ
N t\N
W A (A
A LAI
4 A
C 41 ((A P
F- FP- F- FF- F- FF- 0
03 (41 Li
03 03
03 03
(in
to O a, aak0'
k-cl
-4 -4 -4 -4 -- -4 0CD C D C0CD0C0
vFt 0
- L-AI -4 CD -0 -a El - " N U4 P- ( 03 0- -A WD-O El "&- N (4 - M3a- - 03 -a El s,- " U4 P- Q- -A MD-a] El F- N f- M Or- -A -O LI "- U #- M -4 MD-o " N P, M3 - CD
Li"il a
u aa
"IL
L oo
i l aa El
noaa
0000UO000000000000
(4 (4 (A 4 w (A(4(
P- F- F- F(MP- V~-Js
((4
3 -0 P 03wN
0- -a k- N N
LI LILP iL
C.1 V tit V- -
-4 Li1 il
#1- v (4I
P
003
I
L3 At- k- NV
13 I
I,)1 t-
Li
L L
LI
Li LI
LJ
liii
I3
IA IJ N tj IAL4N1\iC4CiNNNNONNNNL~lt1\IiNNNNNNNNNNNNNN1lNF--F--F-FF-F--F-FF-FF-F--F-FF-F-m
I- VF-p F f-- P(
it v" (4 ri F
NI,1 L Cb -A1k- (1 - (AN "
l -4 0) -4 0- to INi A "El -a 0) -1 G- U
L V Wi k'
C( -a 1) -0- 03
(t-0 o) -A o- (11P- (A N - E3 -0a3 -A - (1 p
U3
El El La
"i Ql 0l
)I nl U-1
El El El El
El M M El El
El El El El El El
C)i l
l
l E l
000l
SMM cl C:)
M0M
0 0l Ul
ElIll
00 clo 00l nnl - l FEl n 0 n El0 El
M0
0 El El
M El
M El lE0M0U
EMC3 El El II 0l3 00 El El
0E0l0M0
Ij
:~:"-,;J
24600.0
2&700.0
24800.0
24900.0
25000.0
25100.0
25200-0
25300.0
25400.0
25500.0
25600.0
25700.0
25a00.0
25900.0
26000.0
26100.0
26200.0
26300.0
26400.0
26500.0
26600.0
26700.0
26800.0
26900.0
27000.0
27100.0
27200.0
27300.0
27400.0
27500.0
27600.0
27700.0
27800.0
27900.0
25000.0
28100.0
28200.0
28300.0
28400.0
2205.0 - 3965.200
2200.1
35010.900
2195.4
35055.390
2190.9 35098.670
2186.4
35140.750
2152.1
35181.630
2177.9 35221.310
2173.8 35259.790
2169.9
35297.070
2166.1
35333.150
2162.4
35368.030
2158.8 35a01.720
2155.4
35434.220
2152.1
35465.520
2148.9
35495.630
2145.8
35524.550
2142.9 35552.280
2140.1
35578.820
2137.4
35604.170
2134.5. 35628.330
2132.4
35651.310
2130.1
35673.100
2127.9
35693.700
2125.9
35713.120
2123.9
35731.360
2122.1
3574.400
2120.5
35764.270
2118.9
35778.950
2117.5 35792.450
2116.2 35a04.770
2115.0
35815.900
2113.9 35825.860
2113.0
35834.640
2112.2 35842.230
2111.5
3584a.640
2111.0
35853.870
2110.5 35857.930
2110.2
35860.800
2110.1
35862.490
12.121
11.827
11.531
11.234
10.936
10.637
10.336
10.035
9.732
9.428
9.124
8.818
8.511
8.203
7.895
7.585
7.275
6.963
6.651
6.338
6.025
437.045
437.344
437.64-1
437.938
438.235
438.531
438.826
439.121
439.415
439.709
440.003
440.295
4a0.5ES
440.80
441.171
441.462
441.753
4a2.043
5.711
443.201
5.396
5.0-0
4.764
443. 89
4A3.778
444.066
A4&.354
Aiignment
ac
==astin;
now.
28500.0
2110.0
35863.000
-.
Target
ieved
acmieve.
A4.48
4.131
3.813
3.495
3.177
2.858
2.539
2.219
1.900
1.580
1.260
.940
.621
.299
442.333
442.622
A42.912
444.64
444.929
445.216
445.503
445.790
&6.077
446.363
446.650
446.936
447.223
447.509
/47.795
448.051
a44 44..368
.01
.00
.01
.01
.01
.01
.01
.00
.00
.01
.01
.00
.01
.01
.00
.00
.00
.00
.00
.01
.01
.00
.01
.20
.0
.01
.00
.00
.00
.02
.00
.00
.00
.02
.00
.00
.02
.01
.00
0.20
74.70
51.53
75.93
74.24
75.98
79.14
79.08
81.17
83.57
81.22
78.72
90.00
80.02
50.89
99.03
158.55
79.44
75.21
163.07
84.08
84.68
-103.12
81.54
86.22
81.05
85.08
57.14
-98.54
90.02
35.26
138.93
90.00
86.02
87.50
-99.60
90.00
8.2-5
-90.96
90.00
0.00
.042
.038
.069
-. 042
.046
.069
.040
.025
.033
.050
.107
.004
.054
.71
.013
.002
.021
.308
.006
.073
.061
.:a8
.Z77
.229
.025
.088
.038
.013
.029
.159
.002
.004
.027
.130
.010
.010
.186
.113
.010
0.000
3505.89
3505.91
3505.94
3505.97
3505.99
3506.01
3506.04
3506.06
3506.09
3506.11
3506.13
3506.17
3506.19
3506.21
3506.24
3506.26
3506.29
3506.31
3506.34
3506.36
3506.38
3506.41
3506.43
3506.45
3506.18
3506.51
3506.55
3506.58
3506.60
3506.62
3506.66
3506.69
3506.76
3506.81
3506.84
3506.87
3506.91
3507.01
3507.19
3508.69
-
I
(
J Li -
1
-41-aL
a
.
-L
1-i t>
4
J
-1
i
1
l (I
CiJ IJ
-4a
- IP
- (II
-(1
A I
-.
-A 4
I jP
in
(N)(
1i
Ci I I
N
I
f
J IC
N
41
,
-
N
(
II-
-
UII
j
a"
LC1
I
IC
1
L
S
3
-Ii C- Ii
(D
C-l I] CO) 4
(11i I
i
-
L
(
IC
I
(.I C-il
4
l
i
al-
4
C-
I
c
ID
CI
I I I (11 aCr(in L
n
i
C-
t-
iL
Il
C
(r
' a-
1i
(-
(
L
-0
a-
l
0I
- (
(II4
-I("
- N cI I
- cJ
Ii - -
-(I.I
(04
-A
Nj C-C-
1-
0D UI C-
NP
L
PN(II
-I
C
i 171
(3 (
(:i
Iit CI) D (It
I- W I I C I
- -4)
01J1 (II Ili
:I t\)c r-I( 1,CLI C
k
C
I I)
(iD )0
-R C
- LA N
- (
N L-
I(11-
- (iI
1i4 --A aI (I l
V
til I 1 tAN
i
14 I(li
4 0- -4 -1 Vi s
-41 i
C3
NIi
1 GI v
-0 LA -1 N
i
e
(
Cl 1I7 1
C- vC:v
-v-I C CIl
C-C-i-Li -01
- Lp f(1 I -0 (1
1 -4
(o CI 1N
-4 Ct (JI I
N NH-> -O1-
I'
0-
1
-
r- 4A- I WL(- uJ fl
N a- IN) -
r
-.
L
4 a- (l
I 0 a-I CL
C iI -A - 1I (1)IO
Cl1
r#- - 0-, I
r -O
4 i -j l UF
Ci N
r ) )
I l
I1
CE CC
Vill
- 0- .
I(IID C(
-4 LI (
-- a3
t- a- M
i
LI 4
\3
V
I CI N
-0 &- -
N
(I -
t-l -0 lJ
-C - -
In
WUGI
.
N -41
5
CJ N
J
I C
Im
N
-I.LI ar- ID N
(I -A -01-11(1
4) Go 0) (L
Jt-
(I
P - N
(1 w U(41
ELl
CJ 1 (4 N
CO (D - V PD 0-
-i I>- i
4
P
-4
LI (4
(II
(15 (It
Cli
(Ii CtI
III Cl
C- a- CII -41 -0
3r i
-I LI N
(- (Ir
(.AI-J aJ- C - 'i
iL Il IJ t -I N
(1) t1
(1)1
OI
( -I fn
-ACi
LI-.1-1r s -I- Ni>
t-
11
I- (4- ci
i
IO
CI E
I)
Li a- LI
I
-Ill
11J Ci
a-a-
l
LI
a
#.
(
I
&
i
i 0-
)Il (11 (II CO
(I
-
1"
(D
(
l
1
4 I
-o0 -
iI
I I
-
rJl -
P
-0
I:
I I
I
II
- II I
(t-
-4 4)
,t
I
6 -
1Il
(it
,
-.8
LI
1-
i-0
L) -1
-0
Il
_)
1 I ( I I
LlU3 ( Cl
I
-4
N N Cl
-3 -0 1:1
(
LI GLI *
3
1 I
-lCi
E)
UCI
V.)
(t ) (A
- 0- -011
r)
N
(it -1 -
-
(li-0 111 B "
II
C(3
tI
1.) i 1
I I Ci (I
.I LI-- ( f
C]
111(
I 11
I1 11 ll ( I C"
IZI I ;I(i]
C+ IC(1
i I l
i .I I I I I I
1i (1L C 1
I1 I
I I Ci I I Cl 1i LI
11 I I -L71: -)
13 Cl LI (I ClCI
-I N
-
s--
CII
. (At(.4 (.
Ct-I I I
II
-4i0
(Ill
(W4LI f
U1
D( -
N I I
C-
(II .
(I
(II
-LI -I
1
(I
r-
WI N L"I
() I I l
Itl'- I
C
UI1tli
Lo
C:l cl
dIIl
14 1i
.1 :I tl _"Li I
-li-I [IC L Li
u
I1l
4 III a- 4 -0
A 4
(11
CI Il
a - -O -0 & (W IN
CI
U-1 Ul IC- 1-
-B C 4 I
(ID LI ft- It -
(DID
(1
-0)
-0
-
f
I--1 I
I
I I I CI I
1 i C II (1
CIL I
C:) II II II 5.1 l:J 1:111
F C- CI 4] LI l - I -)
1-1 I ( I
1
l
Ci 1
iII 1 1
i
C " Cl
_11I
:I I I (VI
I
:ll M I i)
Lis- t I I --' k- I II I V
LI C I I r
-C- (II 4 CIl i - 1 111 -I i
SI
II _InCl 1(1C
OC3n
B I1
ICJ (II I- LI I*, -0 II-J --. I'a- a- 1l
I -II
II I
II C I I
I I i
I I i II I
i
I
(II -(1 N LI
~4
C w -Ai
. I CI
I4 to (111MC
.i
. . I t
C
.i
Ii . . C:
C
. .
Il C
CIUI 1I'lCl1 fI I
"
VI
[I
() v II)U Cl3n
C I I UI III-0
C
L.-I a--C-O
1
LI
U- I
(Ij 1(11
-,
U
U- CO
a-t'
lu
t
CP"
-:1
I3 -
ILi
It- U(i( 11CP
i
A
I I - I
t
i ci a m cl Confl
I
N -a -U 1 I- - 1 P
(11 '- (U N 0%--j 1, av
(11 0 ri( N -4 A - 1U s.
-
(J (1 1 1 1
L L1
I IA
CU
-
" -O LIN A LI Al- (I) U N
L
(D
(II (II
4 1
V 14, -0(l r41
-
(fIt
IN
f-
C-
C- -ID I
C-
N
IIi
I J
I-(
i
I 4 4 -A A )I-- -I
V N
i(- Np
Ii
N 4
-0- - - 0(
-0
-1
-0 L
-
L) (
aI
C- Li, C-I -0
(I ii - (U1 I- L (--,1
N (- -4 -D OCl -+ IJ Ci ,
C
t
[]
{}
C-o1i (4) (D [II
a-(UI
(A
L Il LILi
L
LIC
i
C- - C- Ci
3) ' (3 Ci
-0 - L LIGA UI P (it N
0
5-
I(
V
C) - O
C-LI4
I CIl. k
14( N L
t i
-
LI
N
I
(Al 44 N 1 ,4i
l -o
-oN t
1 1 1C (a
Il ID
IlIIl l1 ( l ( (
)I (CI
-0 -0 - -41
0 -0 -O-0 )- -) -0 -0 -0 -O -L -0 -1 - -D - -0
ED(D (D () toIn D DtOID (D
in (D D iC(D
ID to CD LD
a- a- ar- tII IiitIl I Iif tII
(a-- 0I-4
I (H
(,I
1 -( " 1 a 1 ( ( (l a- -
I(
1 I
LI
14
LAC(i
SelVj
I
t
-11 i1
I-
IIII
(o
4
N
F- F
(15 4)Gi -s-Il-tIeA
Ill ID 41 (-
1iJ -1i (1 -.1 17
I
P-
iN
F
-1Ctaj-
--
I I 0- (II IIt P C
(
-
S11-i
4
-
I
-
I
(t
(.
CJ N I) '-IJ I'I N N
\3 I
- to (f IV> (.1d
o(4-4. -I
N
-A -A
*
IU1 (I IfJ11( W
-
LI I ('
- I (L (II
-4)111 II
4t Ci
- (It 01N 0- 4 0- p- Ci C- 0D N (-
-
I
4
-I
-
I 1 II
CI (UICI C- U- Li
N G
1I
(4
W(1P -0 f1 -t0
iC
I
I
i-
A (L
C l CI
LI
4
-A -A -A -i tA
LIL I
W,J ( 1 tI (W
W C
I V V -P
V 1 (U1 ->
t-V - ca -o I
( J1
LI
A
171i 17 171 l C "
lCi C)U3
C-1 U Cl
Go1(-I IlICJ IJ I N
I
1 -) -0 4)0 1
-I
(1D
I 11-
A] A A
til
tI
V
I 1
)
V) d: IC
"
-
-4
U-1
Z
Ili
.Cl
It
ra
1 t-
-I-C
I
M
t
()
4
Cl
ill
N
Ii
i
-
3
El
I
U
(I
I
-1Iu.
-
It 4C
)
13
11
I]X
II11 311
a A P-l
rt (1
(OC)
-197F
fes n Ia
(A
ID As
ti I
tO
A1 --
-11 1>
0
0Cr1
t
Cu
-4
it
Pl
r1
490.0
500.0
510.0
520.0
530. 0
540.0
550.0
560. 0
570C.
580. 0
590.0
600.0
620.0
63:.0
6.
0
65.0
S660.0
670.0
90 .0
690.0
710.0
720. 0
730.0
74C.0
750. 0
760. 0
770.
Alignment
775.0
7075.3
7070.1
7065.1
7060.3
7055.6
7051.2
7046. 9
311.971
316. 99
320.082
323.919
327.610
331.156
334 .555
7001.
7001 .1
7000.6
7000 .2
7000.0
337.807
340.913
343.872
346.684
349. 348
351.866
354.236
356. 457
358.531
36 . 457
362 .23&4
363.564
365.345
366.678
367.562
368. 97
369. 78
370. 522
371.112
371.552
371.8a43
371. 586
achieved,
::astI:S
7000.0
372.002
7042.8
703 . 9
7035 .2
7031. 7
7025 .3
7025. 2
7022.2
7019.4
7016.8
7014.4
7012.2
7010 .2
700 8.3
7006. 7
7005.2
7003. 9
7002.8
Target achieved.
3.403
3.288
3.172
3. 056
2.940
2.523
2.705
2.587
2.469
2.351
z 232
2.113
1.993
1.573
•.753
-. 633
1.392
1.271
3.150
1.029
.786
. 65
.543
.*421
.299
.177
.057
19.016
19.620
20. 22&
20.827
21 .30
22. 031
22.632
23.233
23.833
24. 32
25.031
25.630
26. 227
Z6.525
27.422
29.019
25.615
29 .211
.29.507
30. 462
30.998
.02
.00
.01
.01
.01
.01
.01
.00
.01
32. 187
32.752
33.377
33 .971
83:-22
86.79
-112.75
82.61
-106.18
90. 02
103.03
-96.33
-94.99
-93. 11
90.00
90. 0
10. 76
-93.95
90.00
-82 .65
-92.99
-91.51
92.17
-92.56
.030
006
.015
.020
.015
.006
.019
.020
.015
.107
.035
.015
.23-
.22
700
-90. CO
9 .11
8987.63
987. 75
8987.83
987. 92
8988.07
5988.20
8988. 35
8988.51
8988.70
988. 89
899.
06
9859.31
8989.53
3989.51
.001
.060
.012
8990.08
5990.33
8990.65
5990.90
8991.29
5991.55
Q991.54
5992.21
.026
.22
265
992. 75
5993.31
5993
.2
5996.91
38.56
34.565
35.159
35.754
78.85
-97.29
-106.17
89.50
.024
124
376
996. 13
5995.51
=gge.
=I
0.00
0.000
9004.19
now.
-.
003
36. 251
APPENDIX F
Computer Program Listing
9, 198 -------------------------------------------- TARGET.TEXT - Apri
C-----------------------------------------------------------------------------PROGRAM Target;
USES
CSU /CCUTL/CCLIS)
CCclkiO
CSU /SYSTEM/PASCLIB) Atmosoere, Exend;
LABEL
', 2, 3;
CONST
REarth=6. 378165e6; CM}
CM/S^2)
GEarth9.80665;
CMA3/S^2)
Mu=3.986032el;
RadTo0e=57.2957795131;
mrintout='/PRNTER';
out+i ie=/V O ALE/TARGET.UTPUT
TYPE
headrecord
R=
ECOR
: STRING CO];
R:EAL;
ThrustlH
MOH
: REAL;
MfueiH
: REAL;
CH
: REAL;
Sre+H
: REAL;
Alpha0MaxH: REAL;
Alph0OOMaxH: REAL;
t"
: REAL;
TitleH
: REAL;
REAL;
REAL;
Rstar
EA t.-A
;
: REAL;
ki
j
S tQa r,
H,2H
EN0;
datareccrd =
time
:
mass
:
VtCoai
:
aititucae :
itan
i
ie :
Yraciai
Vangular :
ranceang :
vreaulrea:
VT3ainec:
thrustang:
tmrustivi:
ieita 'j
,essage
:
RECORD
REAL;
REAL;
REAL;
REAL;
REAL;
REAL;
REAL;
REAL;
REAL;
REAL;
REAL.;
REAL;
REAL;
STRINGC7- 5
ENO;
Stri-
C
=
SThiNGCC30
'
;
VAR
BVRJ
SOM, SP,
SS
BP,
ARRAYCZ..41 OF REAL;
ARRAYC16. .4 OF REAL;
am:
Ot, t;
Sk, PHk, Mki MCI, Mfuei, PHniD, c
ino Vk, Vrkj VQMki Omk-, Rk
multi Cd, Cl, Oraq) Li+t,
vsu,~
-density', pressure) tempi 9 'JO',Q
HZ, YZ, VZO, c-Inrdi
5,-sf, TH,-ust, Tinrusti sigma~i knstart, R~ RZ
VC) VPY VRR, VSiq, VCR, VG; Y~ec, aipina, aipinaO, aldAlciHa) t~leta,
beta, sigrna2i Sammas AlpinaMax, Al=HaOMax, AlzinOotMaxi AlzrvOotOMax,
QeitaVi Oeita~k, SMAi epsilon, OeltaSiST, oicSky Amnax, Y2Max)
REAL;
THrustPerceit, Ystep, t'swvai:
option)
N, couflti
i ntarvai :
First~arget, =Mnd~arget)
at's:
Title, tewtitle:
ineadname:
prnter:
i-eacer set:
H4eajer +i e:
datas Ut:
data+iig:
FUNCTION BrkPress:
INTEGE;
termit'atei
Target~ea&'ned'
STRINGC32;
STRINGES0];
INTERAC"77Ei
Clkstr~o;
aOF
narrec-l-d
datarecoci;
F7LE= OF atarec~rd
BOOLEAN;
EXTERNAL;
savedatal
BOOLEAN;
------------------------------------------.------------------------------C GetInput:
Interactively prompts user for run initialization data
}
------------------------------------------------------------------------PROCEDURE GetInput;
S--------------------------------------------------------C Getinput.ReadHeader:
2
{
j
eads data from file for selected run
initialization
i--------------------------------------------------------PROCEDURE
ReadHeader;
BEGIN
RESET(keaderfiie
CONCAT(heaname,'.HEAOER
REAO(headerfiie, headerset);
Title
:= headerset.TitlieH;
ThrustI
:= headerset.ThrustlH;
MD
:= eaderset.MOH;
M+uel
:= headerset.MfuelH;
C
:= ieaaerse .CH;
Sre+
:= Headerset.Sre+H;
Al=naDMax
:= neaderset.AionmaMaxH;
Aipn0ot0Max:= neacerset.Aion00MaxH;
Dt
:= neacerset.DtH;
Vk
:= neaderset.VkHi;
M=
eaderset.HH;
PhiO
:z= eaderset.PhiOH;
.start
:= readerset.istartH;
H2
:= keaderset.H2H;
V20
:= headerset.VZH;
CLOSE(headerile, LOCK);
END;
---------------------------------------------------------C Getout.WriteHeader:
Writes data
Sinir
iaiization
to
fiie
));
for seiected run
-----------------------------------------------------------------------'POCEDURE Wr
teHeader;
BEGIN
REWRITE(header+ile, CONCAT(headname'.HEAOER'));
WITH headerset D0 BEGIN
TitieH
:= Title;
7 rustH
Trusti;
T=
MOH
:= MO;
M+ueiH
:= Mfuei;
Sre+H
:= Sre+;
Ainha0Max:= A'l=a0Max;
Aipn0OMaxH:= AlriOotOMax;
OtH
VkH
nH
Phi0H
Hstar:H
HZH
V2[H
:= Ot;
:= Vk;
:= Hi
:= PhiS;
:= nstart;
:= H2;
:= V2O;
ENO;
RITE(neacer i
e, heaoerset);
CLOSE(neaderi ie, LOCK);
END;
C----------------------------------------------------------------------C Get-ut
-- -- - -- -- -- - -- -- -- - -- -------- -- -- - -- -- -- - --"------BEGIN
CGetmnmut.
WRITELN;
WRITELN('Initialization options are:');
WRITELN;
1) Use values from an existing -un );
WRITELN('
2) Change vaiues of an existing run');
WRITELN('
3) Create a new run');
WRITELN('
WRITELN;
WRITE('Enter option number: ');
REAOLN(aption);
IF NOT (amtion
REPEAT
WRITELN;
IN C1..3]) THEN
ARITE(cotion:3,' is not an
REAOLN(ootion);
UNT:L (aotion iN C1..3]);
CASE option
Please choose
omtion.
or
1, 2
3:
');
OF
CUse existing run3
1: BEGIN
WRITELN;
WRITE('Enter name of existing run:
REAOLN(Headname);
)
ReadHeader;
ENO;
2:
BEGIN
(CHange existing run3
WRITELN;
WRITE('Enter name at
REAOLN(Headname);
ReadHeader;
existing run:
');
WRITELN;
WRITELN('Title: ',Title);
WRITELN;
WRITE('New title (return for no cnange): ');
REAOLN(newti tie);
=
THEN Titie:=newtitle;
'')
IF NOT(newtitle
WRITELN;
RITELN('Enter vaiues (negative for no c=ange):');
WRITELN;
)
N.
New vaiue=');
WRITE('Trust=',Thrusti:9:,
REAOLN(newval);
IF (newvai>=0) THEN Thrusti:=newvai;
New vaiue= );
ks.
URITE('Initiai mass, MO=1,MOQ:8:1,
;EAOLN(newval)
THEN MO:=newvai;
IF (newval>=O)
RITE(' uel mass, Mfuei=',M+uel:8:u, ' kg. New value=');
REAOLN(newvai );
IF (newvai>=0) THEN M1+uei:=newvai;
JRITE('Exmaust
veincity,
C=',< :
'
m/s.
New
vaiue='
REAOLN(n.ewvai);
IF (newvai>=C) THEN ::=newva,;
RITE('Reference area,
zre=~=
,ref:5:i,'
m^2.
REAOLN(newvai);
(newvai>=0) THEN Sret:=newvai;
\F
URiTE('Max ai=ma, Ai=maMax=,Aloma0Max;6:1'
New vaiue=');
deg.
New vaiue=
REAOLN(newvai);
IF (newval>=O) THEN AiJnaOMax:=newvai;
,RiTE('Max ai=nadot, A iOct~ax=;,AiaOo2Max:6:1,
:es/sec.
New
wa
e
=
);
READLN(newvaI );
IF (rnewvai)0G) THEN Alino~t0Max:=newvai;
WRITE(ITime incrementi Ot=',Dt:6:1,' secs.
REAOLN(newva)
IF (rnewval)G) THEN Ot:rnewvai;
New
value=');
WJiTELN;
itOns:')
'4RITEL:N( 'Enter int ita ~i
WRITELN;
New value=');
WRITE('VelocitY' yinJYk:7:lyj mis.
READLN(newval)
IF (nowvai>=O) THEN Vk:=newva,;
New value=');
/.O:1'km.
WRITEPAltitude, k
READLN( mewva i)
0
IF (rewvai>= ) THEN 4:=newval*1000C
New value=');
e.
~
WRITE(PFliiHt angle,
REACLN(newvaI)
0
1F (rnewva0> ) 71HEN PkilO:innewvai;
WR ITELN;
LRTELNU'Enter
WRITELN;
target values:');
W~ilTE('Aitude
at wIini=L
tz
star-t
tarqem'ng)
'-s
REAOLN(rrewval)
0
THEN Hstart:=ewvai*1OOO
.67F (newvai>= )
km.
2,2~~S,
WRITE('Target altitude)
READLN(nrewval
IF (rewval>=0) THEN H2:=riewval*1COO;
ikm.
New value=');
New value=');
RO=-+Ear tm;
=Z:HZ+REartH;
Amax :z(Ro+RZ) 12;
V2Max:-SQRT(Mu*(Z/RZ2I/An8x));
easibie is JSQRT(MuIR2):9:3,' m/s)');
JRTELN('Tarqet veiccit' (max
(Horimnarn traris~er veica; ty is ',Vzax-9:3,' M/S)');
WRLTELN('
New vaiue');
y2=',VZo:9:3,' rn/S.
WRITE('
REAOLN(mewvaI/'
li (mewvai>=0) THEN V20:=rrewvai;
WRIITELN;
name wrncer
WR17TE('u
REAOLN(lneadmame);
wini-n tn save
"NO'
3: BEGIN
CCreate new rurn1
WR I ELN;
LRTELN('Et~e:-le
REAOLN(7 i 1 1
)
4AEI OLNti)
w T'E( ' 71ire
REAOLN(MQ)
(Na~
s ausm
;?
REAOLN(aDax
E.4LA(~ct~2~are
(t2)
tnis data:
1);
WR17E('7;me
READUN(Ot);
incrgment
WRITELN;
WRITELN( 'Ernter
WRITELN;
WRITE('Velocity
imrt
(seas),
ta i =n
(mis),
Ot=');
itions_
');
V=J);
READLN(VK);
READLN(H);
REACLN(PiO);
WRiTELN('Enter target svaiues:')
WRITELN;
WRITE('Altitude at wic~~n to start targeting (kin), istart=');
REAOLN(start);
,start: 4start*1000O
WaRITE('Target aititude (km), H2=J);
REAOLN(HZ);
HZ: =H2*1COO;
R0:*+REar t~;
R:HZ+REar tHr;
Amnax :i(RO+R2) /2;
V2Max:-SQRT(Mu*(2/R2-1/Amax));
WRITELN('Target veiacity (max +easible is ,SQRT(Mu/R2) :9:3,'
WRITE
('
(Hoinmani trans+er veiccity is
REAOLN(VZO);
WiR17ELN;
eaderr+'
4wRITE(PName a+
REAOLN(Headriame);
WrteHeader;
to
wini
.ji
n th~is cata
is to be
ENO;
END;
[CASE!
,.R1 FE('Sa ve t ine a u .ut
-or t:nis j n
;
REAOLN(arns);
! (ariscl]'Y') OR (ansLjU.='Y)
7THEN savedata:=:RLE
ELSE saveaaa:=FALS=E;
R 1ELN;
REAOLN(Interva')
END;
Czet>7nut2
saved:
m/s)')
');
---------------------------------------Writes out data to screen and disk
C Putut:
C----------------------------------------------------PROCEOURE Putauti
BEGIN
WRITE(t:7:1);
WRITE(Vk:9:1);
WRITE(H/1000:11:3);
WRiTE(Phli:8:3);
WRITE(SiqmaO:9:3);
WRITE(VG:9:2);
WRITE(AlpmaO0:9:2);
WRITE(ThrustPercnt:9:3);
WRITELN(OeitaV:9:Z);
WITH dataset ..0 3EGIN
time:=t;
mass:=Mk;
Vtotai :=Vk;
aititude:=-;
fitang ie:h ic;
Vradial :=Vrk;
Vanguiar :=VomK;
Vreu ired:=VReq;
VTBaine:=VG;
rangeang:=SigmaO;
trustang:=AiciaO;
tnruSt!vi :==Thinruste
deita V:=Oeitav;
nr
messagae:=';
ENO;
IF savedata
ENO;
CFutout'
THEN WRITE(datai
e, catasat);
file at each time step
------
C setup:
Imitia-lizes internal variables and
in~ormation to screen
C
writes rlum
initialization
;R-OCEDURE Setum;
BEGIN
it:;
Drag :=0;
Yreq :=0;
De Itav =0;
o Sk
0;
Mk:=MC;
Yrk :-Vk*SIN(Pk);
\ omk:=Vk*COS(P~k);
Onmk:= k*CS(P-k )/Rk;
7rst~ecnt:n100;
.2:=i42+REa r :r
BYS01 : C
3MCOI 2=0;
aSCOJ :=O;
3iMCO:=;
Al plaMax 2 A Pka0Max/RadTo~eq;
Al prn0otr~ax :A iok~t0Max/RadTcOes;
Fi rstTarget:=TRUE;
En67arget:=FALSE;
terminate:ALE
Tarqe. eacmea:=FALSE';
REURITE(printer;
orintout);
WRI 7ELN;
,.RITEL7;N;
WRT1ELN (Ti
mis,
Mo=,,MO:8:'Ljl
kg,) )
WR1.TELN;
-ns t a r -, = ' , ri 9 c a r -: / 1120 C : 6 - . j ' '<-n i ' )
WI 7ELN (
kin,
r.S t
Oei tav)
ar~etY~,Y20:7~,~
deg/ acc
rn/si);
2
C--------------------------------------------------------------}
Guidance aigorithm to find target trajectory and control
C DoTarget:
2
variable values to steer vehicie onto target trajectory
C
------------------------------------------------------------------------PROCEDURE DoTarget;
r-------------------------------------------------------from roacket equation that will keep 2
Finds.:trust
C OoTarget.FindThrust:
2
at eacr time step
Vk<VRea
t
i------------------------------------------------PROCEOURE FindThrust;
BEGIN
Vstem:=0.99*VG;
Thrust:=(C*Mk/dt)*(1-EXP(-Vstep/c));
IF Thrust > ThrustI THEN Thrust:=Thrustli
ThrustPercent:=Th/rust/Thrustl*10
CFindThrust1
END;
C OoTarget.Cutoff:
S=casting
C
Ends targeting oraceaure anc resets varia=ies
+ight
wnen :icseness to target w~uid
a numericai er-r in ARCCOS or ARCSIN
PROCEDURE Cutoff(reason:
StringaO);
BEGIN
Thrust:=0;
a Lpha:=0;
alphaO:=O;
VReo:=0;
VG:=O;
ThrustPercent:=0;
EndTarget:=TRUE;
RITELN;
IRITELN('Alignment ac.ieved) coasting now.');
')reason);
WRITELN('
jRITELN;
dataset.message:=Al ignment achieved, coasting now.';
WRITE(oatafiie, dataset);
EXIT (DoTarget);
EN0;
CCutoff2
------------------------------------------------------C OoTarget.OneMinusCOS:
FUNCT!ON OneMinusCOS
(X:
Soives
1-COS(X) acc=urateiy
REAL):
;EAL;
BEGIN
OneMinusCOS:=24*QR(EN(X/2));
ENO;
or smaii
X
car
cause
2
}
--------------------------------------------------------C OoTarget
----------------------------------------------------------------------C-}
BEGIN
COoTaret)
-IF
FirstTarget THEN BEGIN
WRITELN;
WRITELN('Starting targeting now.');
-WRITELN;
dataset.messaqe:=Startinq
targeting now.';
WRITE(datafile, dataset);
FirstTarget:=FALSE;
ENO;
IF Rk>=R2 THEN Cutof+('Rk >= R2');
Amax:=(Rk+R2)/2;
V2Max:=SQRT(Mu*(2/R2-1/Amax));
IF V20 <= 0.9999*V2Max THEN BEGIN
V2:=V20;
IF
((2 SMA*R2-SMAR-SM
(R2))/(SMA* k-RkA2
>= 1) THEN Cutof
('sigma = ARCCOS (ars>=l)
R
M
k
(
)/(SMA*k-Rk*R2))l
Q
si ma2 =ARCCO
2
easi on:=R2-Rk;
cord:=GQRT(2*(SQR(Rk)+Rkwaosilan)*(OneMinusCOS(s
ma2))+SQR(epsilan));
samma:=(Pi/2)-ARCSIN((Rk/chrd)*SIN(sigma2));
VC:=V2/COS(amma);
VP:=V2*TAN(gamma);
VSis:=VC*COS(AS(sisma2-samma));
VCR:=VCWIN(S5(sisma2-samma)) ;
gamma>=sigma2
VRR:=VP;
THEN BEGIN
tmeta:=ARCTAN((UP+)C7)/U~is);
END
ELSE :F 3amma<sisma2 THEN BEGIN
thett:ARCTAN(YRR/Y5is);
V
SQ:r SQR(VRR
<T
)+QR (
ENO;
Ss
iOn:=Ve
s);
-Ujk;
+SQem (ep si:)
IF (VG=0)
THEN BEGIN
Thrust:=C;
alphaO:=
;
VG:=(;
TGrus=r0P;rnt:=G;
EXIT (DoTarset);
ENO
=L E Find7Trust;
IF ((VReq/VG)*SIN(AES(Pik-&te-a))
>=
ELSE bta :=ARICSI(
(jec/VG)*S
N AES (
:F (SfCT(SQR(VG)?$QR(Vk))<Vem) THEN
aidai~ba:=aleHa;
:Feta>=5k THEN aiha:=i-=ea
:Feta<PLK THEN aia:eea-=i;
END
ELSE ai=a:=0;
1) THEN =eta:=Pi/2
K-tme-a)));
e'a==i-deral
);
:(TinrustP~rceant>1.C) AND (-G>i.0' AND (Yk<C.5S*Veq) THEN- BEGIN
(ABS(aip ,a-cldAip~la)/Dt > AlmkOatmax) THEN
IF
ioka )*(Alp~DotMax*Ot ) cl ala.
oalA
a io~a:=SGN (a
IF (ABS(aipka) > AlzokaMax) THEN
a' ora:-SIGN( a ioka )*A ipkraMax;
END0
a i=okaD
=aipia*RadToDeq;
IF Brk~ress THEN BEGIN 7ermimate=7RUE;
END ;
rCDTarqetl
GO-T0 2;
END;
C----------------------------------------------------------------------C
Integrate:
Performs Fourth-Order Runga
frame emuations of motion
C
C---------------------------------------------------------------------
FROCEDURE
VAR
CC
1:
Kutta
integration
on
inertial
integrate;
INTEGER;
Integrate.FindOra:
Finds aeradynamic f+orces on vehicie
standard atmos=here mce!
----------------------------------------------------------
i
PROCEDURE
using
1976
}
I
FindOrag;
BEGIN
FinAtmosmhere (density,
Ci :1
aipsa;
Cd:=O.I+Z*CI*Ci;
(CdC
=
pressurey
tmm, 9g
vscundi
);
-12
Q:5=0.ensity*SQR(Vk);
Oras:=QgCd*Sr9;
Lift:=Q*Ci*Sre+;
ENO;
CFindOra
----------------------------------------------------------------------Finds intermediate state
variabie increments
i---------------------------------------------------------
C inegrate.FindB:
PROCEDOUE
2
FindB;
C Integrate.FindB.Imact:
Prevents
iiigit
beneath the earth;s surface
{-------------------------------------------------------------------------3
PROCEDURE
immact;
CsS Cases
BEGIN
RWTELN('moact
an Earth at Q=-,VCN3:7:1);
WRiTELN('End o
run.');
ataset.message:="'mact
on Earth.
End
GOTO 3;
ENO;
Crlmact
83
C+ run.
C--------------------------------------C Integrate.FindS.FuelGone:
C
-
Aliows choice of coasting or
trajectory if fuei burns out
ending
(-------------------------------------------------------------------------}
PROCEDURE FuelGone;
CSS Cases)
BEGIN
WRITELN;
WRiTE('Fuel has burned out,
REAOLN(ans);
IF (ansCll='Y')
THrust:=0;
aipna:=O;
OR
do you want to
(ansCil='y '
)
coast?
');
THEN BESIN
VRe9:=Q;
VG: =0;
ndTarget:=TRUE;
WRITE"N('Coasting now.
WRITELN;
dataser.message:=' Fei gone,
:asting
now
. J;
cataset);
WRITE(oata+iie
GOTO 1;
ENO
ELSE BEGIN
WRiTELN('Ending
trajectory.');
oataset.message:=
Fue; sone;
ending traje =ct ry.';
GOTO 2;
END;
ENO;
t
CFuelGonel
integrate.Find
-------------------------------------------------------------------------
BEF N
in
THEN
IF RCNjN<REartH THEN 7mpa-t;
IF MCN]<M-M+uet THEN FueiGone;
BVRCN]:=Ot*((T7rust*SIN(a :Ha=iEN])+Li7
-Ora
*sIN(=
*COS(=HiN])
iCN]))MCN]-G+R[NN]QR(0mlN]))
SOMEN]>:=t*((Thrust*COS(a
N-a+Pni:N])-Lits:N(PiN])
-Orag*COS(PHiEN]))/(MCNI*RCN])-2*VrN]*O0mN]/RCN]);
BR[N]:=Ot*VrCN];
ESCNJ:=0t*OmCN];
3NPC~N=Ot*(((Lift
Trus*SIN(ai=a))/MENl-=COS(hiLN))/VFN:+OmEN);
SMCN]:O0t*(-T7rust/c);
ENO;
CFincBs
BEGIN
IF
CIntegratal
(Sre+>G)
FOR
THEN '::n6raq ELSE -9 =Ear~*SQR(REartin/Rk)
6:=l TO 4 00 BEGIN
F (1-2) OR (13)
ELSE muJt:=;
THEN
mi:.
vR[.71=rk+BYRA6-.*mult;
OMCI1: Omk+SOME I-i
*mult
REAJ:=Rk+BRE-13*muj t;
MCI1:=Mk+8MCI-13*mui ti
VCEA:=SQR(SR(YR :)i-SR(RCCJ*OMCEAJ));
END;
Vrk:-rk+(SRC1+*BYR2J42*BVRC334.2R&4/6;
Omk:iOrk+(BOM1+2OMC2J+2*OMC3+6OMC4P/)6;
k :=kk(ECJ+2*82JZ+26C3+EPC4.J)/;
Vk:=SQRT SQR(Vrk)+SQR(Rk*Omk));
IF (in>-start) AND (NOT End~arget) THEN 3EGIN
Dci tiS i 3 T=5k-C dSkj
T.
rOt
Ycmk :=k*Omk;
DeltaV;-*N(Mk/M0);
END;
c:Mtegrats!
-- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -C rimt~ata:
Sends all output to printer if user requests data printout3
PROCEOURE PrintOata;
(55 Cases)
BEGIN
RESET(datafiie, outfile);
CDk~ateZ(ateStrins);
ClkimeTimeString);
WRJITELN(or interi
WRITELN(pr inter);
LWRITELN(pr inter);
WRITELN(PrimteriTitle);
,jRITELN(pr imter);
WRJITELN(printer,
Nj
17KrustT)7rust:9:1,'
Mfuel=' M~uel :8:1,'ks)
R1ELN( primter,
C=) ,c:
WR1TELN( pr inter)
1Alp~aMax=',AlphaDMax:5:1,'
iew,
7
:1;1
m/s;
Al ph~ot~1ax= ,Al =KotOMax
::,
Jdeg/sec');
WRITELN(orinter)
IRITELN(pr inter);
WRITELN( printery
I-_ __
Y
__
ThrustDOetaV');
_
_
_
___PH_
S i cza
VG_
_
a inka
WRITELN(pr inter);
WJHILE NOT EOF(catafi Ic)
READ(!ataf:!i
00 BEGIN
6ataset);
WIH ataset 00 BEGIN
IF
message = ''THEN BEGIN
lRITE(pr interi time:7:1);
LWiRI
TErinter,
a ittuoe/
10CC:11:3);
WITE(pr inter, iitangie:S3);
W&RITE(printer, Pangeang:9:3);
WITE(printer, YTBgaine:2);
WRITELN(primter, deita v:9:2);
END
ELS
BEGIN
WRITELN(pr inrter);
WRITELN(or-tnter, -message),
:F (message-'7rajectcrv terminata hy u~ser.'
OR (message-jTarget achievewd.
OR (message='Fwei
some, ending trajectory.')
WRIELN(primter,
END;
WRITELN(printer);
END;
MCI~
END ;
:
14
'Finai
Masa=
,rmass:a:!j
7PEN
ky
BEGIN
I
IF SrkPress THEN BEGIN
CLOSE (datafile, LOCK);
EXIT (Print0ata);
END;
ENO;
CWHILE)
CLOSE(dataiiia, LOCK);
END;
CPrintOatal
C Target
c--------------------------------------------------------
BEGIN
(Target)
WRITELN;
WRITELN('Tarete
IF (Sref>0) THEN
Getinout;
Setup;
Soacejfi=
Tat ectory
Anaivss');
InitAtmosomere;
=unt:=0;
1:
REPEAT
Integrate;
count:mcount+l;
iF (:unt=intervai) THEN BEGIN
.=::ut;
IF BrkPress THEN terminate:=TRUE;
IF
=munt:=0;
(-( >=H2) AND ((P K<O) OR (H>H2*.D1)))
OR ((Pk<D) AND (H2-h < H2*1..e-3))
END;
THEN
TarsetReached:=TRUE
UNTIL terminate OR TargetReaced;
IF terminate THEN BEGIN
IF (count>O) THEN outout;
WRITELN;
WRITELN('Trajectory terminated by user.');
dataset.message:='Trajectory terminated by user.'
END
ELSE IF TargetReached THEN BEGIN
IF (count>O) THEN putout;
WRITELN;
WRITELN('Target acnieved.');
dataset.message:=7Target achieved.';
EN0;
2:
WRITELN;
'RITELN('OeltaV= ',OeitaV:9:Z , m/s');
WRITELN;
RITELN('Finai Mass=',Mk:8:,1
kg,3:
WRITE(ata+iie,
Mass
Ratio=',Mk/MO:7:5);
dataset);
savedata THEN SEGIN
CLOSE(dataiie, 'LOCK);
'F
WR7TELN;
~RITE( 'Pr:resuits? (Y/N) ');
REAOLN(ans);
:F (ansC17='Y') OR (ansE:7=v ') THEN
ENO
ELSE CLOSE(datai ie, =URGE);
ENC.
-i~Daa;
2
UN17
Atrncspkare;
Atmcsz~iere.;
-C1976 Stamdar
LIN TR FAC 7
OONS7 Ge=9.SO665;
R96356756e6;
Ri r-E7. 0;
9Ltemm=288. 15;
~t
VAR
REAL;
ARAY!6
b:m~
..
a:7O
REAL;
up:ARRAYC'. .151 OF REAL;
Imittmsnes
PROCEDUR
PROCEOLRE Fin Atrnsmar
(VAR
c~nsity,
oressLu-gi
tei~
s
vscuman:
REAL;
E~
.4AJ;
I MP LE!.ENT)A 7 ON
SE~j:N
upoer::2CI
7
umperC4:=4 ;
a[
w==erC5>517 l;
j=0e ,C 7: :=%2;
aC
ummercsap=91;
.0486;bCZ
aC 22'
43~ 216.491;
-0
InC4.
0 38;
-Z
1~:=-0-
aZ
at
7
7 465i85;
a: 9
b :7>-
156;
[tem=[::2635
1267;
155 8;
1775;
ltemo[67j:=7C.65;
I~n
-. m 7 : -1 ,5
ltem=C-t.
: I 6.S
=31.34.;
9'
730
upr.2
~r
13
ummerc
a13
46
!qve :!
7N\40
~
a 2
nc~-es
Z.24659-7;
=~4L.23 1e-i7
=
14: =2.5;
3s
00
46
PROCEDURE
FindAtmospierel
REPE.AT
.. t>uo~mrCievei] THEN levei:,evei+l
ELSE IF Ht(u;oer
i eve i-11 THEN i!evi
-ieve-'
UNTIL (upperCevei-l1J(.,t) AND 0nt<u~pr[ eveK:);
CASE
ievei
1) 2) 3,
Cc
4,1 Si 6, 7,
8:
pressup-e :=ens ity*Ra ir*temp;
END',
BEGIN
6ersity:=aeve*EXP~b~ieveiK*h,);
pressur6 :=tmityRr*teno;
ENO;
BEGIN
pressure:=emsty*Ra ir*:tem=;
ENO:
END;
ENO .
CrnAtrncsmm'er-ei
~-l-~ac~,-=-===~a~qr~~ IIICI
-"
-
-
e
--
1.
I
P~
I
REFERENCES
(1)
McHenry, R.L., Brand, T.J., et al, "Space Shuttle Ascent, Guidance, Navigation, and Control", Journal of the Astronautical
Sciences, Vol. XXVII, No. 1, pp. 1-38, January-March, 1979
(2)
Battin, R.H., An Introduction to the Mathematics and Methods of
Astrodvnamics, in publication, 1984
(3)
Battin, R.H.,
(4)
Stuhlinger, E.,
(5)
U.S. Standard Atmosphere, 1976, U.S. Government Printing Office,
Washington, D.C., October 1976
Astronautical Guidance, McGraw-Hill,
1964
Ion Propulsion for Space Flight, McGraw-Hill, 1964
I
I-