Copyright 2005 Mark Holland
advertisement

Copyright 2005
Mark Holland
Automatic Creation of Product-Term-Based Reconfigurable Architectures for
System-on-a-Chip
Mark Holland
A dissertation submitted in partial fulfillment of the requirements for the degree of
Doctor of Philosophy
University of Washington
2005
Program Authorized to Offer Degree:
Department of Electrical Engineering
University of Washington
Graduate School
This is to certify that I have examined this copy of a doctoral dissertation by
Mark Holland
and have found that it is complete and satisfactory in all respects,
and that any and all revisions required by the final
examining committee have been made.
Chair of Supervisory Committee:
________________________________________________________________
Scott Hauck
Reading Committee:
________________________________________________________________
Carl Ebeling
________________________________________________________________
Scott Hauck
________________________________________________________________
Larry McMurchie
Date:_______________________________
In presenting this dissertation in partial fulfillment of the requirements for the doctoral
degree at the University of Washington, I agree that the Library shall make its copies
freely available for inspection. I further agree that extensive copying of the dissertation
is allowable only for scholarly purposes, consistent with “fair use” as prescribed in the
U.S. Copyright Law. Requests for copying or reproduction of this dissertation may be
referred to Proquest Information and Learning, 300 North Zeeb Road, Ann Arbor, MI
48106-1346, to whom the author has granted “the right to reproduce and sell (a) copies of
the manuscript in microform and/or (b) printed copies of the manuscript made from
microform.”
Signature______________________________________
Date__________________________________________
University of Washington
Abstract
Automatic Creation of Product-Term-Based Reconfigurable Architectures for
System-on-a-Chip
Mark Holland
Chair of the Supervisory Committee:
Professor Scott Hauck
Department of Electrical Engineering
Technology scaling has brought the IC industry to the point where several distinct
components can be integrated onto a single chip. Many of these System-on-a-Chip (SoC) devices
would benefit from the inclusion of reprogrammable logic on the silicon die, as it can add general
computing ability, provide run-time reconfigurability, or be used for post-fabrication
modifications. Also, by tailoring the reconfigurable fabric to the SoC domain, additional
area/delay/power gains can be achieved over current, more general fabrics.
Developing a
domain-specific reconfigurable fabric has traditionally taken too much time and effort to be
worthwhile. We are alleviating these design costs by automating the process of creating domainspecific reconfigurable fabrics: a project we call Totem.
This dissertation details our work in creating tools that will automate the creation of domainspecific PLAs, PALs, and CPLDs for use in SoC devices. The input to the toolset is a group of
circuits that need to be supported on the reconfigurable fabric. The tools then create a PLA, PAL,
or CPLD that is tailored to the specific test circuits, with an option for strategically providing
additional resources in order to support future, unknown circuits. The output of the toolset is a
fully optimized VLSI layout of the reconfigurable fabric. This VLSI layout can be provided to a
designer for direct integration into an SoC design.
Our domain-specific CPLD architectures based on full crossbars outperform
representative fixed architectures by 5.6x to 11.9x in terms of area-delay product. Our
toolset has also been used to find several more efficient fixed architectures, but our
domain-specific architectures still outperform these new fixed architectures by 1.8x to
2.5x. Sparse-crossbar-based CPLDs have also been created, and require only 37% of the
area and 30% of the propagation delay of the full-crossbar-based CPLDs. Lastly, an
analysis of our sparse-crossbar-based CPLD architectures suggests that, in order to
support future circuits, the crossbar switch density should be augmented by 5% over the
base density, and additional PLAs of the base PLA-size should be provided for additional
logic utilization.
Table of Contents
List of Figures .................................................................................................................... iv
List of Tables ..................................................................................................................... ix
1
Introduction................................................................................................................. 1
2
Programmable Logic Devices..................................................................................... 5
2.1
Programmable Logic Devices..................................................................... 5
2.1.1
Complex Programmable Logic Devices (CPLDs)................................ 12
2.1.2
Case Study – Xilinx CoolRunner XPLA3 CPLD ................................. 13
3
CAD for Programmable Logic.................................................................................. 17
4
Reconfigurable Hardware in SoC ............................................................................. 23
4.1
System-on-a-Chip Design Methodology .................................................. 23
4.2
Reconfigurable Hardware in SoC ............................................................. 24
4.2.1
Using HDLs .......................................................................................... 24
4.2.2
Using Reconfigurable IP....................................................................... 27
4.2.3
Reconfigurable Chips as the SoC ......................................................... 32
4.3
5
Research Framework ................................................................................................ 36
5.1
Totem-PLA ............................................................................................... 36
5.1.1
Circuits.................................................................................................. 36
5.1.2
Delay Model.......................................................................................... 38
5.2
6
Motivating Reconfigurable Hardware in SoC .......................................... 33
Totem-CPLD............................................................................................. 43
5.2.1
Circuits.................................................................................................. 43
5.2.2
Delay Model.......................................................................................... 46
5.2.3
Area Model ........................................................................................... 48
Domain-Specific PLAs and PALs ............................................................................ 49
6.1
Tool Flow.................................................................................................. 49
6.2
Architecture Generator.............................................................................. 51
i
6.3
Layout Generator ...................................................................................... 57
6.4
Methodology............................................................................................. 59
6.5
Results....................................................................................................... 60
6.5.1
Architecture Generator.......................................................................... 60
6.5.2
Layout Generator .................................................................................. 69
6.6
7
Logic in Domain-Specific CPLDs ............................................................................ 72
7.1
Tool Flow.................................................................................................. 73
7.2
Architecture Generator.............................................................................. 73
7.2.1
Search Algorithms ................................................................................ 78
7.2.2
Algorithm Add-Ons .............................................................................. 98
7.3
Layout Generator .................................................................................... 101
7.4
Methodology........................................................................................... 103
7.4.1
7.5
Failed PLAmap Runs.......................................................................... 104
Results..................................................................................................... 105
7.5.1
Benefits of Domain-Specific Devices................................................. 111
7.5.2
Using Other Evaluation Metrics ......................................................... 114
7.6
8
Conclusions............................................................................................... 69
Conclusions............................................................................................. 115
Routing in Domain-Specific CPLDs ...................................................................... 116
8.1
Crossbars................................................................................................. 117
8.2
Sparse-Crossbar Generation.................................................................... 119
8.2.1
Initial Switch Placement ..................................................................... 122
8.2.2
Moving Switches ................................................................................ 125
8.2.3
Algorithm Termination ....................................................................... 128
8.2.4
Switch Smoothing............................................................................... 129
8.3
Routing for CPLDs with Sparse Crossbars............................................. 134
8.4
Determining Switch Density of Sparse Crossbars .................................. 136
8.5
Results..................................................................................................... 136
8.5.1
Using Other Evaluation Metrics ......................................................... 139
ii
8.6
9
Adding Capacity to Domain-Specific CPLDs ........................................................ 142
9.1
Adding Capacity to CPLDs .................................................................... 143
9.2
Methodology........................................................................................... 144
9.2.1
10
Conclusions............................................................................................. 140
Routing Failures.................................................................................. 146
9.3
Results..................................................................................................... 148
9.4
Conclusions............................................................................................. 156
Conclusions and Future Work ............................................................................ 158
10.1
Contributions........................................................................................... 158
10.2
Conclusions and Future Work ................................................................ 160
References....................................................................................................................... 168
Appendix A: Kuhn/Munkres Algorithm......................................................................... 173
Appendix B: Layout Units .............................................................................................. 178
iii
List of Figures
Figure 1. An SRAM cell. ................................................................................................... 6
Figure 2. Wiring using an SRAM controlled transistor..................................................... 7
Figure 3. Using wires and switches to create a full crossbar ............................................. 7
Figure 4. Conceptual diagram of a PLA ............................................................................ 8
Figure 5. Representing array switches with dots ............................................................... 9
Figure 6. Representing gates in a PLA ............................................................................ 10
Figure 7. PLA representation we will use throughout this work ..................................... 10
Figure 8. A pseudo-nMOS (sense-amplifying) PLA ....................................................... 11
Figure 9. Complete Network PLA implementation......................................................... 12
Figure 10. Full, depopulated, and sparse crossbars ......................................................... 13
Figure 11. The Xilinx CoolRunner XPLA3 CPLD Architecture .................................... 14
Figure 12. The Xilinx CoolRunner XPLA3 CPLD Functional Block............................. 15
Figure 13. The Xilinx CoolRunner XPLA3 CPLD Macrocell ........................................ 16
Figure 14. CAD flow for programming reconfigurable hardware................................... 17
Figure 15. Representing a circuit with a DAG ................................................................ 18
Figure 16. Sample circuit after PLAmap's labeling stage................................................ 20
Figure 17. Sample circuit after PLAmap's mapping stage............................................... 21
Figure 18. Sample circuit after PLAmap's packing stage. ............................................... 22
Figure 19. Directional (left) and gradual (right) Wilton architectures............................. 25
Figure 20. Product-term-based synthesizable architectures............................................. 27
Figure 21. Glacier PLA (GPLA)...................................................................................... 28
Figure 22. A tile in the RaPiD array ................................................................................ 31
Figure 23. The Totem-RaPiD tool flow........................................................................... 32
Figure 24. The RC model for an inverter......................................................................... 38
Figure 25. Path propagation through a PLA .................................................................... 40
Figure 26. Transforming circuits to BLIF format............................................................ 44
iv
Figure 27. Delay path in a CPLD..................................................................................... 47
Figure 28. PLA/PAL Generation Tool Flow ................................................................... 50
Figure 29. Mapping circuits in PLAs/PALs .................................................................... 52
Figure 30. Options for using the Kuhn/Munkres algorithm ............................................ 53
Figure 31. Suboptimality introduced by the Kuhn/Munkres algorithm........................... 54
Figure 32. Cost function nuances..................................................................................... 55
Figure 33. Allowable annealing moves ........................................................................... 56
Figure 34. Tiling pre-made layout cells to create PLAs .................................................. 58
Figure 35. A PLA created using pseudo-nMOS .............................................................. 59
Figure 36. Possible cost reductions using our metric ...................................................... 61
Figure 37. A representative portion of the shift circuit.................................................... 63
Figure 38. Bit reduction vs. percent array utilization ...................................................... 67
Figure 39. Bit reduction vs. connection count agreement ............................................... 67
Figure 40. Failure of the compactor to reduce area ......................................................... 70
Figure 41. Totem-CPLD Tool Flow ................................................................................ 73
Figure 42. CPLD Architecture Generator........................................................................ 74
Figure 43. A 1-D search through the PLA space, input step ........................................... 77
Figure 44. A 1-D search through the PLA space, output step ......................................... 77
Figure 45. A 1-D search through the PLA space, product term step ............................... 78
Figure 46. General pseudocode for the search algorithms............................................... 79
Figure 47. Hill Descent Algorithm .................................................................................. 80
Figure 48. Pseudocode for the input step of the Hill Descent algorithm......................... 81
Figure 49. Pseudocode for the output step of the Hill Descent algorithm....................... 82
Figure 50. Pseudocode for the product-term step of the Hill Descent algorithm ............ 83
Figure 51. Input optimization step of the Successive Refinement algorithm .................. 84
Figure 52. Successive refinement trimming .................................................................... 85
Figure 53. Pseudocode for the input step of the Successive Refinement algorithm........ 86
Figure 54. Pseudocode for trimming ............................................................................... 87
Figure 55. Pseudocode for the output step of the Successive Refinement algorithm...... 88
v
Figure 56. Pseudocode for the product-term step of Successive Refinement................. 89
Figure 57. Choose N Regions Algorithm ........................................................................ 90
Figure 58. Pseudocode for the input step of the Choose N Regions algorithm ............... 91
Figure 59. Pseudocode for the output step of the Choose N Regions algorithm ............. 92
Figure 60. Pseudocode for the product-term step of the Choose N Regions algorithm .. 93
Figure 61. Run M Points Algorithm ................................................................................ 94
Figure 62. Pseudocode for the input step of the Run M Points algorithm....................... 95
Figure 63. Pseudocode for the output step of the Run M Points algorithm..................... 96
Figure 64. Pseudocode for the product-term step of the Run M Points algorithm .......... 97
Figure 65. Pseudocode for the radial search add-on ........................................................ 99
Figure 66. Top-level pseudocode when using a second algorithm iteration.................. 100
Figure 67. Top-level pseudocode when using the small PLA inflexibility add-on ....... 101
Figure 68. CPLD floorplan and layout .......................................................................... 102
Figure 69. Determination of N in Choose N Regions algorithm ................................... 106
Figure 70. Determination of M in Run M Points algorithm .......................................... 107
Figure 71. Our use of full and sparse crossbars ............................................................. 117
Figure 72. Full crossbar connectivity............................................................................. 117
Figure 73. Minimal full crossbar ................................................................................... 118
Figure 74. Maximizing connectivity in crossbars.......................................................... 120
Figure 75. Representing crossbar input lines as vectors of 1s and 0s............................ 120
Figure 76. Crossbars, their vector representations, and their hamming distances ......... 121
Figure 77. Top level pseudocode for the switch placement algorithm .......................... 122
Figure 78. Pseudocode for initial switch placement algorithm...................................... 123
Figure 79. Sample initial switch placement ................................................................... 124
Figure 80. Allowable switch moves............................................................................... 126
Figure 81. Pseudocode for the switch movement algorithm.......................................... 127
Figure 82. Routability results from several different switch patterns............................ 128
Figure 83. Routing full crossbars................................................................................... 130
Figure 84. Routing sparse crossbars .............................................................................. 130
vi
Figure 85. Ideal switch placement for layout................................................................. 131
Figure 86. Pseudocode for the switch smoothing algorithm.......................................... 132
Figure 87. Switch smoothing example........................................................................... 133
Figure 88. Representative layouts of unsmoothed and smoothed crossbars.................. 133
Figure 89. A simple CPLD and its routing graph .......................................................... 135
Figure 90. Binary Search pseudocode ........................................................................... 137
Figure 91. Evaluating CPLD augmentation strategies................................................... 145
Figure 92. Pseudocode for spreading out CPLD mappings........................................... 147
Figure 93. Results of adding switches to our crossbars ................................................. 150
Figure 94. Results of adding specific logic resources.................................................... 151
Figure 95. Results of adding specific logic resources, best case ................................... 153
Figure 96. Results of augmenting PLA size .................................................................. 154
Figure 97. Results of using hybrid augmentation strategy ............................................ 156
Figure 98. Difficulties of automatic 2-D FPGA generation .......................................... 165
Figure 99. Setting up the Kuhn/Munkres algorithm ...................................................... 173
Figure 100. Calculating product term costs for Kuhn/Munkres .................................... 174
Figure 101. Turning our product term problem into maximal perfect matching........... 174
Figure 102. Initial valuse for f in Kuhn/Munkres .......................................................... 175
Figure 103. The graph G, the values of f, and the spanning subgraph Gf ....................... 175
Figure 104. Pseudocode for the Kuhn/Munkres algorithm............................................. 176
Figure 105. Units in our CPLDs .................................................................................... 180
Figure 106. Programmable switch from the CPLD crossbar......................................... 181
Figure 107. Inverter and buffer that feed the PLA's AND-plane................................... 182
Figure 108. AND-plane connection............................................................................... 183
Figure 109. Pullup transistor for the AND-plane........................................................... 184
Figure 110. Buffer between the AND-plane and OR-plane .......................................... 185
Figure 111. OR-plane connection .................................................................................. 186
Figure 112. Pullup transistor for the OR-plane.............................................................. 187
Figure 113. Inverter appearing after the OR-plane........................................................ 188
vii
Figure 114. D-Flip-Flop used for optional registering of the PLA outputs ................... 189
Figure 115. 2-to-1 multiplexor for choosing the registered/unregistered PLA output .. 190
Figure 116. SRAM bit used for controlling the 2-to-1 multiplexor............................... 191
viii
List of Tables
Table 1. The circuits used for Totem-PLA ...................................................................... 37
Table 2. The sample domains used for preliminary testing ............................................. 44
Table 3. The main domains used in our work.................................................................. 45
Table 4. Additional domains used for Chapter 9 results.................................................. 46
Table 5. The circuits, with their information and groupings ........................................... 60
Table 6. Running the PLA/PAL algorithms on multiple occurrences of acircuit............ 62
Table 7. Results of PLA-Fixed and PLA-Variable algorithms vs circuit count .............. 65
Table 8. Reductions in programmable bits and delay for PLA/PAL algorithms............. 68
Table 9. Results for different PLA parameters in our test circuits .................................. 75
Table 10. Results for different PLA parameters in our test circuits, refined ................... 76
Table 11. Architecture results for our domain-specific algorithms ............................... 107
Table 12. Base algorithm results compared to using a second iteration........................ 108
Table 13. Search algorithms run with a second iteration............................................... 109
Table 14. Search algorithms run with a second iteration, using old models ................. 110
Table 15. Domain-specific architecture performance vs fixed architectures ................ 111
Table 16. Mapping results for the three largest circuits in the floating-point domain.... 112
Table 17. Mapping results for the four largest circuits in the arithmetic domain.......... 112
Table 18. Running each domain on the best domain-specific architectures.................. 113
Table 19. Running each domain on the consensus architecture .................................... 113
Table 20. Results for area-delay driven, area driven, and delay driven modes ............. 114
Table 21. Area of routing resources in CPLDs.............................................................. 116
Table 22. Switch smoothing algorithm results .............................................................. 134
Table 23. Full-crossbar results vs sparse-crossbar results ............................................. 138
Table 24. Switch densities of sparse crossbars .............................................................. 138
Table 25. Best results found for full and sparse-crossbar-based CPLDs....................... 138
Table 26. Results of area-delay driven, area driven, and delay driven modes .............. 139
ix
Table 27. Strategies for adding capacity to our CPLD architectures............................. 144
Table 28. Results of adding switches to our crossbars .................................................. 150
Table 29. Results of adding specific logic resources...................................................... 151
Table 30. Results of adding specific logic resources, best case..................................... 152
Table 31. Results of augmenting the PLA size.............................................................. 153
Table 32. Results of using hybrid augmentation strategy.............................................. 155
x
1
1 Introduction
As the semiconductor industry continues to follow Moore’s Law, a switch in design
paradigm is occurring.
The former “System-on-a-Board” style, which had several
discrete components individually fabricated and then integrated together on a board, is
becoming obsolete. Because of the constant increase in gate count (currently chips can
hold hundreds of millions of wirable gates), we are at a point where distinct VLSI
components can now be incorporated onto a single silicon chip. This “System-on-aChip” (SoC) methodology is becoming very popular, as its benefits include improved
area/delay/power characteristics as well as increased inter-device communication
bandwidth.
A drawback of the SoC methodology is that chip designs are much larger and more
complicated than in previous design methods. Designs tend to be more involved and
time consuming due to the need to tightly integrate multiple components onto a single
substrate. A result of this is that design decisions tend to be cemented earlier in the
design process, as any design modification will likely affect the integration of the entire
system. This leaves little room for any sort of modifiability late in the design cycle,
regardless of how useful such modifications might be.
An elegant solution to this problem is to include reconfigurable logic on SoC
devices. Reconfigurable logic is composed of a mixture of routing and logic resources
that are controlled by SRAM bits, such that programming the SRAM bits allows
designers to implement designs directly in hardware. Designing in hardware provides the
benefits of high speed and low power, while the reprogrammability of these devices gives
them much of the flexibility of a general-purpose processor. Including reconfigurable
logic on an SoC would allow designers to make design decisions late in the design cycle,
as they could implement these aspects on the reconfigurable fabric. Additionally, the
2
reconfigurable logic can be leveraged for general computing ability, can provide run-time
reconfigurability, or could even be used as a means for providing upgradeability for a
device that is already being used in its target environment.
Traditional reconfigurable logic devices can provide good performance, but they do
not approach the performance provided by an application specific integrated circuit
(ASIC). In order to retain generality, and to be able to support a large number of
disparate designs, reconfigurable devices need to have a large amount of flexibility. The
programming overhead required by this flexibility, however, is exactly what prevents
reconfigurable devices from performing as well as ASICs. As such, it would be useful to
remove unnecessary flexibility from a reconfigurable device in order to reduce the area,
delay, and power penalties that are incurred.
One way to remove flexibility from a reconfigurable device is to tailor it to a
particular domain.
A “domain-specific” reconfigurable architecture is one that is
designed to efficiently support a specific application domain, but which does not need to
support any sort of design outside of this domain. By specifying the applications that the
reconfigurable logic must support, the flexibility of the architecture can be greatly
reduced, resulting in greater performance.
Many examples of domain-specific reconfigurable architectures exist.
Within
academia, RaPiD [1, 2] and Pleiades [3] have been created to target the DSP domain,
while PipeRench [4] has been created for use within the multimedia domain. Domainspecific commercial architectures have also started to appear, as Xilinx’s Virtex-4
devices come in three different flavors: “Ultra-high-performance signal processing”,
“Embedded processing and high-speed serial connectivity”, and “High-performance
logic” [5].
All of these domain-specific architectures took a great amount of time and effort to
design, however. An SoC designer might not be willing to wait several months for a
domain-specific reconfigurable architecture to be created for their chip, as it would likely
delay the completion of the device. The dilemma thus becomes creating these domain-
3
specific reconfigurable fabrics in a short enough time that they can be useful to SoC
designers.
The Totem project is our attempt to reduce the amount of effort and time that goes
into the process of designing domain-specific reconfigurable logic. By automating the
generation process, we will be able to accept a domain description and quickly return a
reconfigurable architecture that targets the specific application domain, allowing SoC
designers to get an efficient architecture with no adverse effects on their design schedule.
Early work in Totem [6-25] has leveraged RaPiD, a one-dimensional word-wide
architecture that uses coarse-grained units (ALUs, Multipliers, RAMs, etc.) to target
applications within the DSP domain.
This work deals with the creation of domain-specific CPLD architectures for use in
SoC, a project termed Totem-CPLD.
CPLDs are relatively small reconfigurable
architectures that typically use PLAs or PALs as their functional units, and which connect
the units using a single, central interconnect structure. In commercial architectures, the
functional units tend to be relatively coarse-grained in order to provide shallow
mappings, leading to low, predictable delays.
•
Chapter 2: Programmable Logic Devices introduces the concept of
reconfigurable hardware, providing technical background for the reconfigurable
devices that are applicable to the work described in this dissertation.
•
Chapter 3: CAD for Programmable Logic introduces the basic CAD design flow
for reconfigurable devices and provides details for some of the algorithms that
we will be using.
•
Chapter 4: Reconfigurable Hardware in SoC provides an introduction to the
System-on-a-Chip methodology, and provides examples of reconfigurable
architectures that have been created with the SoC device in mind.
•
Chapter 5: Research Framework provides the experimental foundation of the
work presented here, including information on the benchmark sets used and the
methods employed in evaluating our results.
4
•
Chapter 6: Domain-Specific PLAs and PALs takes a look at the logic units
typically used in CPLDs and examines the ways in which they can be tailored to
an application domain.
•
Chapter 7: Logic in Domain-Specific CPLDs introduces the algorithms used to
tailor the logic in a full-crossbar-based CPLD to a specific application domain.
•
Chapter 8: Routing in Domain-Specific CPLDs introduces the use of sparse
switch matrices in the CPLD crossbar structures, and discusses how to tailor
these routing structures to a specific application domain.
•
Chapter 9: Adding Capacity to Domain-Specific CPLDs provides an analysis of
which CPLD characteristics are most essential for providing support for future
untested designs, ensuring that they will fit onto the CPLD architecture.
•
Chapter 10: Conclusions and Future Work provides a summary of the
contributions of this work, as well as suggestions for future work that can be
performed.
5
2 Programmable Logic Devices
Programmable logic devices (PLDs) are a popular solution for systems where fast
turn-around-time and/or low cost are high priorities.
PLDs achieve these features
through post-fabrication modifiability, as they are capable of changing the circuits that
they implement in response to user-supplied specifications. This chapter provides the
technical background necessary for understanding PLD architectures, with particular
emphasis on the Complex Programmable Logic Device (CPLD), as this is the primary
architecture that we consider in this dissertation. In order to familiarize the reader with
typical device specifications, we also provide a close examination of a popular
commercial CPLD, the Xilinx CoolRunner XPLA3.
2.1 Programmable Logic Devices
PLDs are devices that are capable of being dynamically reconfigured at any time to
implement new designs. They achieve this by containing routing and logic resources that
are controlled by modifiable memories: adjust the memory contents and you adjust the
routing structure and/or the functions being implemented by the logic resources.
Different styles of memory have been employed in the creation of PLDs, from basic
EEPROM (electrically erasable programmable read-only memory), to flash memory, to
SRAM (static random access memory). EEPROM and flash seem to be the preferred
memory style for CPLDs [26-29], as they have the attractive characteristic of retaining
their contents when powered off, allowing instant logic availability at boot-up. EEPROM
and flash memories retain their contents because they use floating-gate transistors:
application of extra high or low voltage differentials across a floating gate causes
tunneling to deposit or remove electrons from the floating gate, changing the threshold of
the EEPROM or flash transistor. Regular operating voltages have negligent effects upon
6
these floating gates, just as the absence of power does not effect them, so they are able to
retain their programmed states even when powered off.
One constraint on our designs is that we must implement our reconfigurable
architecture in the same process technology that the rest of the SoC is going to be using,
since everything will be implemented on a single piece of silicon. While floating gates
are useful in creating certain memories, they are not particularly useful in the design of
processors, DSPs, or custom logic, and it is these other blocks that will dictate the process
technology of the SoC. EEPROM and flash memories are therefore not reasonable
memory choices for us, because the SoC fabrication process won’t have the ability to
create the necessary floating gates.
SRAM memory cells, on the other hand, are created without the need for floating
gates. They can be fabricated using the same technology that most SoC devices will use,
and are therefore an attractive memory solution for our reconfigurable architectures. We
will be using SRAM as the configuration memory in our work, and it will be laid out as
individual SRAM cells as shown in Figure 1.
word
bit
bit_b
bit_out
Figure 1. A simple 6-transistor SRAM cell. The cell is programmed by setting word=1 and applying
the proper values to bit and bit_b. bit_out represents the value of the cell
Figure 2 shows how a single SRAM cell can be used to configure routing resources.
In the figure, two wires are connected by a transistor, with the gate of the transistor being
controlled by an SRAM cell (the circled P will be used to denote a single SRAM bit from
here forward). By setting the bit to 1, signals can be driven across the transistor. By
setting the bit to 0, the horizontal and vertical wires are isolated.
7
Wire2
P
Wire1
Figure 2. An SRAM controlled transistor can isolate or connect wire1 and wire2
Wires and configurable switches like the one shown in Figure 2 can easily be used to
create a full crossbar, as shown in Figure 3. We now have several horizontal wires that
can each be connected to any of several vertical wires. In the normal operation of a
crossbar, each output wire is connected to exactly one input wire, with the numbers of
output wires less than or equal to the number of input wires. Figure 3 also shows the
simplified drawing of this crossbar, representing the configurable switches with dots.
This is how we will draw the crossbar in future diagrams.
outputs
P
P
P
P
P
P
P
P
P
P
P
P
inputs
Figure 3. Using wires and switches to create a full crossbar. Right, the configurable switches are
represented by dots
One method of performing logic in PLDs is through the use of a programmable logic
array, or PLA. PLAs are devices that directly implement two level sum-of-products style
logic functions. They do this with the use of a programmable AND-plane that leads to a
8
programmable OR-plane, as shown in Figure 4. Input signals come into the array in both
true and negated form, and the appropriate signals are fed as inputs to the AND gates as
determined by configurable switches.
The outputs of these AND gates are then
selectively fed to OR gates, again controlled by configurable switches. The outputs of
the OR gates can then be registered or used as combinational signals, as determined by
the bit controlling the output multiplexer. Note that the actual hardware implementation
of a PLA, discussed later in this chapter, is actually much more efficient than what is
shown in the figure.
P
P
P
P
P
P
P
P
P
P
P
P
P
P
P
P
P
P
P
P
P
P
P
P
P
P
P
P
P
P
P
P
P
P
P
P
P
P
P
P
P
P
P
P
P
P
P
P
P
P
P
P
P
P
P
P
P
P
P
P
P
P
P
P
P
P
CLK
In0
CLK
In1
P
P
Out0
Out1
Figure 4. Conceptual diagram of a PLA, with a programmable AND-plane (left) and a
programmable OR-plane (right), including optional registering of the outputs
9
When drawing a PLA, it is common to omit the switches that connect orthogonal
wires in the arrays and to simply put dots in locations where the switches are configured
to connect wires. Figure 5 displays this transition, as the left half shows a configuration
with the programmable bits set to 1 (conducting) or 0 (not conducting), and the right half
shows the same function in the simplified representation. In future diagrams we will also
not be drawing the optional registering at the output of the PLA, despite the fact that it
always exists. This is done to make the diagram less cluttered.
0
1
0
0
0
0
0
1
0
0
1
0
1
0
0
0
=
Figure 5. Switches that are turned on in PLA arrays will be represented by dots. This is shown for
the AND-plane, and is also true for the OR-plane
Another convention is to omit the AND and OR gates in the drawing, and to merge
their respective input wires into one wire. Using this representation, the horizontal wires
that leave the AND-plane represent the outputs of AND gates, and the vertical wires that
leave the OR-plane represent the outputs of OR gates. Figure 6 displays this transition,
as the left half depicts the individual wires that feed the gates, and the right half shows
the same function being implemented in simplified form.
To give a specific example of this new simplified representation, Figure 7 displays
a small PLA. The functions being implemented by the array are also listed in the figure.
Notice that PLA arrays are defined by how many inputs, product terms, and outputs they
can represent. The PLA in the figure has four inputs, three product terms, and two
outputs, which will be written in shorthand as a 4-3-2 PLA.
Most PLAs are not actually implemented with AND and OR-planes, but instead with
two NOR-planes. As Equation 1 shows, equations in sum-of-products (or AND-OR)
form can easily be represented in NOR-NOR form by applying De Morgan’s law. In
10
order to ensure that the same equation is being implemented, we must simply negate all
the input values and then negate the subsequent output. Since we already have true and
negated forms of each input, this will be easy to do.
=
Figure 6. The gates will be represented by individual wires, and all inputs to the gates will be
connected by dots to the line. This is shown for the AND gates, and is also true for the OR gates
3 Product Terms
AND-Plane
OR-Plane
F0
F1
2 Outputs
X0
X1
X2
X3
F0 = X0X2 + X0 X1
4 Inputs
F1 = X0X1 + X3
Figure 7. The representation of a PLA that we will use throughout this work. PLAs are specified by
the number of inputs, product terms, and outputs that they can represent
AB + C D + AD = A + B + C + D + A + D = A + B + C + D + A + D
(1)
The method in which configurability is implemented in a PLA depends upon the
implementation style of the array, but NOR-NOR PLAs are particularly well suited to
11
pseudo-nMOS (also called sense amplifying) implementations, as shown in Figure 8.
Using this style, the array connections need only consist of two small series pull-down
transistors: the first transistor’s gate is controlled by the input line, and the second
transistor is controlled by a user-specified SRAM bit, controlling whether the output line
can actually be discharged by making the first transistor conduct.
An additional
advantage to this style is that only pull-up transistors are needed at the edges of the
arrays. It can be seen that each plane implements the NOR function, as plane-outputs are
initially charged to high through the pull-up transistors, and any array input that is a 1
will pull the output to low. Pseudo-nMOS PLAs have very compact layouts and very
reasonable delay characteristics, so this is the implementation style that we use.
GND
GND
GND
VDD
GND
P
P
P
P
P
GND
P
P
P
GND
VDD
X0
f0
f1
Figure 8. A PLA implemented in pseudo-nMOS (also called "sense-amplifying") style
There is another type of array that directly performs sum-of-products style logic, and
it is called a PAL. A PAL differs from a PLA in only one way: rather than having a fully
programmable OR-plane, a PAL has fixed OR gates. Because of this, PALs tend to be
12
slightly smaller than PLAs, but they are not as flexible as PLAs due to the fixed nature of
their OR implementation.
2.1.1
Complex Programmable Logic Devices (CPLDs)
All of the components that we’ve just introduced can be combined to form a popular
style of PLD, the Complex Programmable Logic Device (CPLD). CPLDs use either
PLAs or PALs as their functional units, and typically connect the functional units
together using a crossbar. Because they use crossbars as their interconnect structures,
and crossbars grow quickly in size, CPLDs have historically been limited to
implementing small to medium sized designs.
Routing in a CPLD is typically done through the use of a “complete network”.
Using this method, every device input (from I/O) and every PLA/PAL output directly
drives a wire that traverses the length of the device, as shown in Figure 9. Connections to
the PLA/PAL inputs are then made using crossbars. If full crossbars are used, then the
problem of routing signals in a CPLD is trivial because the crossbar delivers “full
capacity”.
Inputs
I/Os
Outputs
Figure 9. A "Complete Network" in which all outputs and I/Os are available as inputs to all units
A crossbar delivers full capacity if any subset of inputs wires (obeying
numInputsInSubset ≤ numOutputs ) can reach output wires. If depopulated crossbars are
13
used, such that not all of the crosspoints in the crossbars have switches, then routing
algorithms will need to be employed if full capacity is not still guaranteed. We will call
crossbars that do not provide full capacity “sparse” crossbars. Figure 10 displays a full
crossbar, a depopulated crossbar that still provides full capacity (choose any set of four or
fewer inputs and they can be connected to outputs), and a sparse crossbar that does not
provide full connectivity.
(A)
(B)
(C)
Figure 10. A full crossbar (A), a depopulated crossbar that still provides full capacity (B), and a
sparse crossbar that does not provide full capacity (C)
2.1.2
Case Study – Xilinx CoolRunner XPLA3 CPLD
The CPLD description given above is very basic, and commercial devices tend to
add many bells and whistles to the basic CPLD in order to increase performance and
flexibility. In order to further familiarize the reader with CPLD architectures, this section
gives a discussion of the Xilinx CoolRunner XPLA3 CPLD [26].
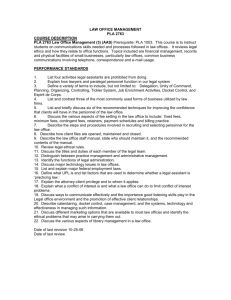
Figure 11 shows the Xilinx XPLA3 CPLD Architecture. A Function Block and 16
Macrocells (MC) combine to form each PLA, and the Zero-power Interconnect Array
(ZIA) is a virtual crosspoint switch, providing full connectivity between the PLAs. All
I/Os and PLA outputs feed the ZIA, and PLA inputs are pulled from the ZIA. The basic
PLA has 40 inputs, 48 product terms, and 16 outputs. These devices come in varying
sizes, ranging from 32 Macrocells (2 PLAs) to 512 Macrocells (32 PLAs). A 128
Macrocell device is shown. I/O capacities range from 36 I/Os for a 32 Macrocell device,
to 260 I/Os for a 512 Macrocell device.
14
Figure 11. The Xilinx CoolRunner XPLA3 CPLD Architecture [26]
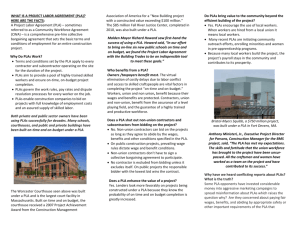
Figure 12 shows the functional block in more detail. The basic PLA can be seen in
this diagram, as 40 inputs from the ZIA feed the Product-Term Array, creating 48 product
terms that get ORed (along the bottom) to create 16 different outputs, with one output
going to each Macrocell. Xilinx has also added functionality to this basic PLA. Wider
logic equations can be synthesized using the eight Foldback NAND product terms at the
top of the diagram. Eight other product terms (PT0 – PT7) can be used as control signals
for the register that exists in the Macrocell. Additionally, 16 product terms (PT32-PT47)
are available for timing critical signals, and can be fed directly to the Macrocell rather
than feeding the ORed product terms to the Macrocell.
The Variable Function
Multiplexers (VFM), which choose between the high-speed wires and the ORed product
term outputs, can also increase logic density by implementing some two input logic
functions.
15
Figure 12. The Xilinx CoolRunner XPLA3 CPLD Functional Block [26]
The Macrocell is shown in Figure 13. The output of the VFM is fed to a register that
can be configured as a D-, T-, or Latch-type flip-flop, and which can be controlled by
many sources. There are then two muxed paths leading to the ZIA. The first mux selects
between the combinational or registered output of the VFM. The second mux selects
between the output of the register or the I/O pad of the Macrocell. If the I/O pad is being
used as an input, this is how the signal is driven onto the ZIA.
16
Figure 13. The Xilinx CoolRunner XPLA3 CPLD Macrocell [26]
The Xilinx CoolRunner XPLA3 CPLD provides all of the basic CPLD functionality
described earlier, and also provides hardware that increases logic density and allows for
high-speed signal paths. We will not be concerned with creating these optimizations in
our own CPLD architectures, but will instead be attempting to tailor the basic PLA/PAL
devices in order to optimize them to application domains.
This introduction to programmable logic devices provides sufficient background for
understanding the architectural issues present throughout the remainder of this
dissertation. If desired, additional details can be obtained by closer examination of the
device introduced in this section [26].
17
3 CAD for Programmable Logic
In the previous chapter we introduced some reconfigurable architectures, and showed
how they can be made to represent different designs by configuring the SRAM bits in the
architecture. The task of figuring out exactly how to program each SRAM bit is done by
Computer-Aided-Design (CAD) tools. A typical CAD design flow is shown in Figure
14. The designer describes their design either in a high-level hardware description
language (HDL) or in schematic form, and feeds this to the CAD tools. The design is
first synthesized into a gate-level description (if necessary), and then technology mapped
in order to use the actual functional units that the PLD architecture contains. The CAD
tools then place and route the circuit onto the target device architecture, and output the
configuration bitstream that is used to program the actual SRAM bits that reside on the
device. Feedback in the design cycle can occur if constraints (i.e. timing or area) are not
met.
Design Entry
Synthesis
Technology Mapping
Placement
Routing
Bitstream
Figure 14. Typical CAD flow for programming reconfigurable hardware
18
This dissertation is aimed at creating domain-specific CPLDs, so we need to examine
how this affects the basic CAD tool flow shown in Figure 14. Our CPLDs will use
complete networks, so all of the signals will traverse the length of the architecture by
default. This removes our need for a placement algorithm. We will initially use full
crossbars to connect the routing and logic resources, so this removes the need for a
routing algorithm in our early work. In Chapter 8 we will create architectures that do not
use full crossbars, but we will use well-established techniques for the task of routing
these architectures.
Synthesis for our CPLDs will also be done using standard
techniques. This leaves us with the task of technology mapping, which will actually have
a direct affect on our methodology and results.
In general, the technology-mapping problem for CPLDs has been most successfully
handled by graph-based algorithms, which are created from simple Boolean networks. A
Boolean network can be represented as a directed acyclic graph (DAG) where each node
is a logic gate and a directed edge (j, k) exists if the output of gate j is an input of gate k.
A primary input (PI) node has no input edges and a primary output (PO) node has no
output edges. Figure 15 shows the DAG representation of a simple circuit.
A
A
1
B
B
3
1
Z
C
2
3
C
Z
2
D
D
Figure 15. A simple circuit and its DAG representation
Currently, the best technology-mapping algorithm for CPLDs is a tool called
PLAmap [30] which was developed at UCLA in 2001. PLAmap is a performance driven
mapping algorithm whose primary goal is to minimize the delay/depth of the mapped
circuit. Heuristics are applied to reduce the area of a mapping, but area optimization is
19
secondary to delay optimization in this algorithm. This is the technology-mapper that we
will employ in this work.
Some background terminology is required to understand the basic PLAmap
algorithm. A (k, m, p)–PLA implies a PLA with k inputs, m product terms, and p
outputs. A cluster is a subgraph of the network graph with the property that any path
connecting two arbitrary nodes in the cluster lies entirely within the cluster. So if
PLAmap is mapping to an architecture with (k, m, p)-PLAs, then the goal of the
algorithm is to cover the entire Boolean network with (k, m, p)-feasible clusters, which
are then converted into PLAs.
The clusters need not be disjoint, as nodes can be
duplicated as long as the final network is equivalent to the original. The main objective
of the algorithm is to minimize circuit delay, which occurs by minimizing the depth of
the mapping. This is an NP-hard problem, so PLAmap uses heuristics to tackle it.
The input to PLAmap is a 2-bounded circuit, meaning that it consists of gates with
no more than two inputs. A pre-processing step transforms this gate representation into a
DAG. The main PLAmap algorithm then works in three steps. In the “labeling” step,
each node is given a level (corresponding to circuit depth) that provides clustering
information for future steps. Next is the “mapping” step, in which nodes are mapped into
specific (k, m, p)-PLAs. Last is a “packing” step, in which PLAmap tries to pack PLAs
into each other in order to reduce area.
In the labeling phase, we start by labeling each PI as 0.
The nodes are then
considered in topological order. For a node v, let l be the maximum label of all its fanin
nodes. If node v grouped with the predecessors of v that have label l form a (k, m, 1)feasible cluster, then we give v the label l. Otherwise we label v with (l + 1). This label
represents the logic depth of all the nodes in the network, and the maximum label from
this phase will be the depth of the final mapping. Figure 16 gives an example of the
labels applied to each node in a sample network that is mapping to 3-3-2 PLAs.
In the second stage, termed “mapping”, the algorithm transforms the (k, m, 1)feasible clusters into (k, m, p)-feasible clusters based on the labeling information from
stage 1. The nodes are considered individually, working backwards from POs to PIs (in
20
label-decreasing, slack-increasing order, and reordered before each node is considered).
If the node currently under consideration has not been put into a cluster yet, then a singleoutput cluster is formed to include the node and all of its predecessors that have the same
label. If this cluster attempts to cover a node that has already been mapped into some
other cluster, then one of three things can occur. First, the algorithm attempts to merge
the clusters that share the shared node. If this doesn’t work, the algorithm attempts to
form a reduced cluster that does not include the shared node. This requires “slack” in the
system, and if the depth of the mapping is affected by forming this reduced cluster, then
the reduced cluster is rejected. This leads to the final (and worst) case, in which the node
is simply duplicated.
a
b
c
d
e
1
1
1
f
1
1
2
1
2
g
2
3
y
z
Figure 16. Sample circuit after PLAmap's labeling stage. The labels are listed in the gates
If a node considered in the mapping stage has already been put into a cluster, a
problem may arise if the output of this node feeds out of the cluster it is in. First, the
algorithm attempts to introduce this output as a new output to the cluster. If it cannot
introduce a new output to the cluster, then the node must be duplicated, and the
duplicated node forms its own cluster. Figure 17 shows the circuit from Figure 16 after
mapping has occurred.
21
Last, the packing stage occurs, in which the algorithm attempts to reduce the total
number of PLAs. The first operation it performs is PLA collapsing, where the algorithm
attempts to collapse a PLA into all of its fanout PLAs so that the original PLA can be
eliminated. Since collapsing some PLAs into their fanout PLAs might preclude the
possibility of collapsing other PLAs, they used the empirical results shown in [31] that
suggest that smaller PLAs should be collapsed first (smaller in terms of inputs * product
terms). The second packing operation attempts to merge PLAs that share a large number
of inputs. So for each PLA, a list is formed containing the other PLAs that it shares
inputs with (in decreasing order of inputs shared), and the algorithm attempts to merge
them. Applying packing to the circuit from Figure 17 results in a reduction from 9
clusters to 5 clusters, and gives us our final network for 3-3-2 PLAs, shown in Figure 18.
PLAmap showed good mapping results when compared to preexisting technology
mapping algorithms. TEMPLA was the best academic technology-mapper for CPLDs
before PLAmap was created, but PLAmap was able to reduce the mapping depth (and
therefore the delay) of TEMPLA by 50% at a mere 10% cost in area. PLAmap was also
compared to Altera’s MAX+PLUS II tool, which uses 12% less area than PLAmap but
incurs 58% more delay. These results help justify our use of PLAmap as our technologymapper.
a
b
y
c
d
e
f
g
z
Figure 17. Sample circuit after PLAmap's mapping stage. Dashed boxes depict the clusters
22
a
b
y
c
d
e
f
g
z
Figure 18. Sample circuit after PLAmap's packing stage. Dashed boxes depict the clusters, and
ultimately the PLAs
23
4 Reconfigurable Hardware in SoC
This chapter provides information about the System-on-a-Chip design methodology,
and presents ways in which reconfigurable hardware can be introduced into the SoC
environment, citing examples of existing work. The chapter then concludes with some
design examples that motivate the incorporation of reconfigurable hardware in SoC
devices.
4.1 System-on-a-Chip Design Methodology
The System-on-a-Chip (SoC) design methodology has only recently become viable,
due to the ever-increasing device densities realizable in VLSI systems.
This
methodology has many benefits, including reduced area, reduced delay, reduced power,
and increased inter-device communication bandwidth. These advantages come at the cost
of design complexity, however. Instead of dealing with just a few million transistors, a
design team might now have to lay out hundreds of millions of transistors in order to
form a complete SoC design. This difficult task would lead to very expensive devices, in
terms of both time and money, if everything on the chip needed to be painstakingly laid
out by hand.
One way that designers get around this complexity is by using hardware description
languages (HDLs) and synthesis tools. In this process, a designer would write HDL code
to describe his design, and would then use a synthesis tool to map that design to a gatelevel description. This gate-level description would then be implemented in standard
cells and laid out on the chip. This design methodology provides fast turn-around time,
but the implementations suffer area, power, and delay penalties due to the intrinsic
overheads of standard cells. In many cases these penalties are acceptable, but sometimes
24
they are not. An emerging process that can remedy some of these performance issues is
the concept of intellectual property (IP) reuse.
The basic idea of IP reuse is that once a subcircuit is carefully designed, tested, and
verified, that the next user who wishes to use the subcircuit won’t have to go through
those steps again. Thus an SoC designer could grab the layouts of components that have
already been made (processors, DSPs, memories, etc.) and use custom logic or standard
cell logic to integrate them together onto a single die. This would dramatically reduce the
design time, not to mention that the verification of each component has already been
done. The functionality of the integrated SoC system will still need to be verified, but
this is true of any design.
4.2 Reconfigurable Hardware in SoC
Reconfigurable hardware can be integrated into an SoC device using either of the
above methods: by describing the reconfigurable fabric in a HDL and using standard
cells, or by integrating reconfigurable IP into the chip. HDL entry is typically easier to
incorporate into the design flow since other aspects of the SoC will probably be described
by HDLs as well, but using IP will provide better performance characteristics since the IP
core has already been meticulously laid out. Clearly, a trade-off exists between ease-ofuse and performance.
A third way to get reconfigurability onto an SoC is to simply use a large
reconfigurable device as your SoC device. As we’ll illustrate, there are chips currently
being marketed with this exact goal in mind, and they are very capable of handling many
SoC designs by themselves.
4.2.1
Using HDLs
Two examples of using HDLs to create reconfigurable hardware for SoC devices
have come from the University of British Columbia. In [32] and [33], Wilton et. al.
propose both LUT based and product-term-based reconfigurable architectures to be used
in SoC applications.
25
In [32], they outline the details of the process that a chip designer would go through
when using their logic. First, the SoC designer partitions the chip design into functions
that will use fixed logic (which he describes in a hardware description language or HDL)
vs. functions that will use programmable logic. He then acquires an HDL description of
the behavior of the programmable logic core, provided by the UBC tools. The designer
can then merge the HDL descriptions of the fixed and programmable logic and go
through ASIC synthesis, place, and route tools in order to implement the HDL
description. The chip is then fabricated, after which the programmable logic can be
configured to behave however the designer chooses.
The proposed reconfigurable architectures in [32] and [33] are all directional,
meaning that there are no feedback loops: this is a byproduct of the fact that they are
creating their cores using HDLs. The need for directionality comes from the fact that
many synthesis tools have problems with combinational loops. In [32], their directional
requirement led them to create two types of implementations, a standard island-style
architecture with directional routing and a gradual architecture, both of which used 3LUTs (look-up tables) as their logic elements. An n-LUT is a user-configurable memory
element that accepts n inputs and creates one output. These architectures are shown in
Figure 19.
Figure 19. Directional (left) and gradual (right) architectures from [32]
26
Results from [32] showed that the gradual architecture performed better than the
island-style architecture by 15% to 20%, and they also found that the gradual architecture
works better if it is not rectangular, but rather it tapers to a slightly smaller (triangular)
structure as you move along the datapath. These ideas helped guide the work in [33] in
which they develop directional architectures that use PLAs as logic elements instead of 3LUTs. For their PLAs, they used only the gradual architecture but again considered
rectangular and triangular designs (shown in Figure 20). Their exploration of PLA-size
showed that HDL cores with 9-input, 3-output, 9 or 18 product-term PLAs showed 35%
area improvements and 72% speed improvements over their LUT-based architectures
from [32]. They also showed that a triangular gradual architecture performs better than a
rectangular architecture for PLAs.
UBC’s deliverable is an HDL description, or “soft core”, of the reconfigurable logic.
Supplying a soft core would most likely make integration easier for the SoC designer, as
the same synthesis tools can be used to create the reconfigurable logic as are used to
synthesize the fixed portions of the chip. The synthesis of the reconfigurable logic would
most likely be done using standard cells, however, which are very inefficient at creating
reconfigurable architectures. Simple switches (which are often just single transistors),
SRAM cells, and PLA arrays (if they choose a product-term style) don’t exist in standard
cell libraries, but they are very prevalent in reconfigurable architectures, and instantiating
them in standard cells would create very drastic area, delay, and power penalties. The
group admits to this problem, and suggests that the area, delay, and power penalties
imposed by their soft cores would most likely only be acceptable for small amounts of
programmable logic.
27
Figure 20. Product-term-based synthesizable architectures [33]
4.2.2
Using Reconfigurable IP
One example of reconfigurable IP comes from Mo and Brayton, who propose a
highly regular “Glacier” PLA (GPLA) structure [34] for use in SoC devices. Their
28
proposal is to stack multiple configurable PLAs in a uni-directional structure using fixed
river routing to connect them together. Optional registering can be implemented in the
silicon below the river routing in order to support sequential designs. The result is a
structure that benefits from both high circuit regularity and predictable area and delay
formulation. This structure is shown in Figure 21.
GPLAs are very regular, and their authors site this as an advantage when
transforming layouts to masks, as fewer layout patterns need to be examined. Fixed
routing resources make the job of the CAD tools a bit more difficult by adding more
restrictions, but this is partially alleviated by the fact that most input and output tracks in
their PLAs are interchangeable – the only differences are that some input columns feed
directly through to input columns on the next PLA. In their results, they display that
GPLAs and Xilinx XC4000XL FPGAs with similar programmable bit counts can support
roughly the same number of designs, showing that their densities in terms of gate-count
per programmable bit are similar.
Figure 21. Glacier PLA (GPLA) with configurable PLAs and fixed river routing [34]
29
Another work presents a high-performance programmable logic core for SoC
applications [35]. In this paper, a new architecture is developed which uses a highperformance dynamic circuit design style called OPL. OPL is a precharged-high logic
family, so only discharging is necessary upon function evaluation. Due to this, they show
that OPL designs provide 5x speedups over conventional circuit design styles when
implementing circuits that map well to wide NOR gates. The work also introduces a
novel product-term-based logic structure that utilizes OPL-friendly NOR gates. While
most product-term-based reconfigurable logic provides a fixed input, product term, and
output capacity, the logic structures proposed in this paper provide further gains by
allowing these amounts to be variable. This avoids the area losses caused by unutilized
logic resources in most product-term-based designs, because most PLAs are only
partially utilized.
One important consideration for this OPL-based design is clock distribution, as the
logic family requires successive clock phases to be present with very short separation
times. This requires considerable clock-generation overhead, which takes up area that
could otherwise be utilized for logic. Power consumption is also increased due to the
need for a large number of minimally spaced clocks. The goal of this device, though,
was increased speed. A test chip was produced and timing values extracted, and results
showed that this new architecture provided an average speedup of 3.7x over a Xilinx
Virtex-E FPGA.
The previous examples were academic in nature, but commercial reconfigurable IP
cores exist as well. Actel, for example, has an embedded FPGA core that can be tiled
into SoC devices to provide anywhere from 5000 to 40,000 equivalent ASIC gates [36].
They also have tile configurations that provide cascadable RAM modules for applications
that require more memory. Elixent, another company creating reconfigurable IP cores,
has developed what they call a D-Fabrix Processing Array [37]. A D-Fabrix tile contains
two 4-bit ALUs, two registers, and two switchboxes.
By tiling these units in the
hundreds or thousands, the array is capable of efficiently supporting algorithms that
30
require high arithmetic throughput. Their reconfigurable IP is so useful that it is already
being licensed by companies for use in SoC applications [38].
4.2.2.1 Totem
The D-Fabrix Processing Array is an example of a reconfigurable fabric that is
tailored to a particular application domain: in this case, arithmetic designs. D-Fabrix
already exists, so it can easily be integrated into new SoC design starts. If an SoC
designer wanted a reconfigurable fabric that was tailored to some other domain, however,
the time required to design the domain-specific reconfigurable fabric would probably be
too time-prohibitive for the designer to accept. Quick turn-around time is an important
constraint for almost all designs, and should be considered when trying to create new
reconfigurable fabrics. The Totem project at the University of Washington is an attempt
to create these domain-specific reconfigurable architectures quickly and automatically,
such that there is no negative impact on the SoC’s design cycle.
Previous work in Totem [6-25] leveraged the RaPiD [1, 2] architecture, which was
developed by Carl Ebeling et. al. at the University of Washington.
RaPiD is an
architecture that targets the digital-signal-processing (DSP) domain.
It is a one-
dimensional word-wide architecture that uses coarse-grained units (ALUs, Multipliers,
RAMs, etc.) to perform computations. A picture of this is shown in Figure 22.
Data flows horizontally in the array, switching onto vertical wires to reach functional
units and then returning to horizontal wires. The routing structure is composed of three
types of tracks: feedback tracks which route a unit’s output back to its inputs, short tracks
that span a small number of functional units, and long tracks that span a large number of
functional units. Bus connectors exist on the long tracks in order to allow even longer
tracks to be formed, and also to provide registering in the interconnect. The datapath is
16-bits wide, leveraging the fact that DSP computations such as multiplication and
addition tend to operate on word-wide data rather than bit-wide data.
31
Figure 22. A tile in the RaPiD array [1, 2]
The RaPiD architecture is tailored to be domain specific by adjusting the blend of
resources that it contains.
Many modifications can be made, including varying the
amount and mixture of functional units, the bit-width of the datapath, the number of data
lines, the mix of long/short wire segments, and the number of registers in the datapath.
New functional units can even be created in order to target RaPiD-style architectures to
non-DSP applications, as was demonstrated by RaPiD-AES [12], which created a new set
of private-key encryption based functional units for targeting the algorithms from the
Advanced Encryption Standard competition [49].
Different algorithms will clearly
require different resource mixes, and Totem is able to provide this by modifying the
RaPiD architecture to meet the algorithm’s needs.
The basic flow of Totem-RaPiD is shown in Figure 23. The SoC designer supplies
the Architecture Generator with a domain description, including netlists and constraints.
The Architecture Generator uses this information to create an architecture description in a
hardware description language (HDL) that is sent to the VLSI Layout Generator and the
Place & Route Tool Generator. The VLSI Layout Generator creates an actual layout
mask for the described architecture and gives this layout to the designer. This layout is
what will physically be put onto the chip. The Place & Route Tool Generator creates the
32
physical design tools for the specified reconfigurable architecture. The tools created here
are responsible for mapping user designs to the architecture.
Domain
description Constraints
VLSI
Layout
Generator
Layout
Masks
*
Architecture
Generator
+
LUT
Circuit
architecture
description
P&R
Tool
Generator
Place
Route
01101100…
Figure 23. The Totem-RaPiD tool flow
Work
in
Totem-RaPiD
demonstrates
that
domain-specific
reconfigurable
architectures can be developed quickly and automatically in response to the input of a
domain specification. It is hoped that SoC designers will be more likely to utilize
reconfigurable hardware if it can be developed quickly and tailored to the specific
domain of the SoC. Totem provides these attributes.
4.2.3
Reconfigurable Chips as the SoC
A third option, and one that is becoming more and more viable, is the use of an
FPGA as a configurable-system-on-a-chip (CSoC). Instead of putting reconfigurable
hardware onto an SoC device, we are now implementing the SoC device totally in
reconfigurable hardware.
The XILINX Virtex-II Pro series of FPGAs are a good example of this configurableSoC idea.
The Virtex-II Pro (XC2VPX70) [39] has over 74000 LUTs, two IBM
PowerPC processor blocks, over 300 18 x 18 bit multiplier blocks, over 5 megabytes of
33
block RAM, and 20 multi-gigabit transceiver blocks. Such a large, dynamic device is
capable of handling many SoC designs by itself.
Xilinx has further targeted the CSoC market with the recent introduction of their
Virtex-IV devices. Each of these devices comes tailored to a specific application domain,
including signal processing, embedded processing/high-speed connectivity, and highperformance logic. Among the three domains there are seventeen available devices,
allowing the SoC designer to choose the product that best matches the size and resource
requirements of their design. As an example of how these devices are tailored to a
domain, the signal processing devices contain extra memory and DSP specific slices that
“support over 40 dynamically controlled operating modes including; multiplier,
multiplier-accumulator, multiplier-adder/subtractor, three input adder, barrel shifter, wide
bus multiplexers, or wide counters.” [40]
4.3 Motivating Reconfigurable Hardware in SoC
Reconfigurable hardware has many uses in the field of Systems-on-a-Chip. The
reconfigurable fabric can be used as a coprocessor to speed up computation, whether by
exploiting parallelism in code or targeting frequently executed loops. Reconfigurable
resources can also be used for supporting different standards/protocols, or for providing
easy upgradeability. The reconfigurable resources can even be used to test other parts of
the SoC device.
A coprocessor design that is targeted for SoC is described in [41]. The work targets
motion estimation, which is a complex computation that is found in video compression
algorithms such as MPEG-4. Their system is a chip that consists of a Digital Signal
Processor (DSP) and a number of reconfigurable arrays, with a bus providing
communication between them, and a controller integrating the elements together. During
runtime, the controller identifies algorithms that can be efficiently executed in hardware
and it dynamically programs the reconfigurable blocks to implement these algorithms.
The use of a coprocessor provides speed and power gains over a lone DSP, and their
34
results show that the mating of DSP and reconfigurable logic provide 4x power gains and
2x area gains over an FPGA implementation using a Xilinx Virtex-E.
Another use of reconfigurable logic in SoC is to allow conformity to different
standards. This could be especially useful in a domain like wireless communication,
where several different communication protocols are in use. Cell phones can operate
using either analog or digital service, and in the digital realm there are different
transmission technologies that a phone can use (TDMA/GSM or CDMA for example).
Because of these different technologies, a phone that works in the United States won’t
necessarily work in Europe, but a cell phone that contained a chip with reconfigurable
logic could use this logic to adjust its transmission protocols according to what is
required in the specific region. A phone could then conform to all wireless networks
without requiring hardware that is specifically dedicated to each protocol.
Along a similar line, reprogrammability allows upgrades to be made very easily. If a
chip uses a protocol that is likely to be upgraded or improved upon soon, it can be
implemented in programmable logic. As long as there is enough programmable logic
available to accommodate the new upgraded protocol, the chip will be able to
accommodate the change and continue functioning in its environment. This will save the
cost of having to fabricate a whole new device simply in order to support a change in
protocol or procedure.
Reconfigurable logic can also be included in an SoC in order to facilitate testing. As
described in [42], having an embedded FPGA on an SoC allows for built-in-self-test
(BIST) to occur without any overhead. They cite that logic BIST for an ASIC can
require a 20% area overhead and discernable performance degradation.
But by
implementing the BIST logic on the FPGA during testing one can eliminate these
overheads, and once the testing is done the BIST logic can be completely removed and
replace by functions that will be useful during normal operation. The work describes
both how to test the embedded FPGA and how to then use the embedded FPGA to test
the other cores on the chip.
35
A second work also considers using reconfigurable logic to test an SoC device [43].
In this work a flexible network is integrated on the SoC, and is used to select internal
signals that are of interest for specified debug tasks. These signals are then provided to a
programmable logic core (PLC), which is used to implement debugging circuitry. Tests
can be controlled using an on-chip processor if one is present; otherwise they are
controlled using an external JTAG interface. While the testing methods proposed in this
work use the reconfigurable logic solely for debug purposes, they predict that this debug
hardware will require less than 10% of the area of the SoC device. Considering the
improved observability and controllability that this process will provide, these area costs
seem quite reasonable.
These are just a few of the possible uses of reconfigurable hardware in SoC devices.
The work described in this paper is an effort to create reconfigurable hardware
specifically for SoC by tailoring the fabric to the SoC’s specific domain, and by
automating the hardware generation process so that SoC designers don’t have to worry
about adverse effects on their design cycle.
36
5 Research Framework
This dissertation presents tools that automate the creation of domain-specific CPLDs
for System-on-a-Chip. In order to develop and evaluate these tools, we first needed to
acquire the circuits that would be used in our test domains. We also had to create the
area and delay models that would be used for evaluating our architectures. This chapter
presents these items in more detail.
5.1 Totem-PLA
In Chapter 6 we will begin our exploration of the domain-specific CPLD space by
first considering domain-specific PLAs and PALs, a project termed Totem-PLA. In order
to create these structures, we first had to acquire appropriate circuits and group them into
domains. For each of these domains, we could then create domain-specific PLAs and
PALs.
Additionally, these PLA and PAL architectures had to be evaluated for
performance, which required the creation of accurate delay models.
5.1.1
Circuits
Individual PLAs and PALs are logic devices that are capable of picking up registers
only at their outputs, not internally. As such, sequential circuits cannot be mapped to
individual devices unless some sort of feedback is implemented and the arrays are
utilized for multiple passes of logic. This is not typically done, as it is much easier to
connect multiple PLAs/PALs into a CPLD structure that provides the desired behavior
with better performance.
Because of this characteristic of PLAs and PALs, only
combinational circuits are used in Totem-PLA.
The first source of circuits for Totem-PLA was the ESPRESSO suite [44].
ESPRESSO is the standard two-level logic minimization algorithm in use today, and the
circuits in the suite are the same ones that the ESPRESSO algorithm used for testing. A
37
second set of circuits came from the benchmark suite compiled by the 1993 Logic
Synthesis Workshop, also called LGSynth93 (the well known MCNC benchmark circuits
also come from this suite) [45]. As a whole, these circuits are commonly used in research
on programmable logic arrays. The circuits are already in PLA format, so they need no
manipulation before being sent through the tool flow presented in Chapter 6.
Table 1 gives information on the circuits used in Totem-PLA. The function of many
of these circuits is unknown, so we were unable to group them into domains according to
their target applications. For the purposes of this work, it was sufficient to group them
into domains according to relative size, as this will be a factor in how well our
subsequent algorithms perform.
Table 1. The circuits used for Totem-PLA
Domain
1
2
3
4
Circuit
IN
OUT
PT
Prog. Conn.
ti
xparc
b2
shift
b10
table5.pla
misex3c.pla
table3.pla
newcpla1
tms
m2
exp
seq
apex1
apex3
47
41
16
19
15
17
14
14
9
8
8
8
41
45
54
72
73
17
16
11
15
14
14
16
16
16
18
35
45
50
213
254
106
100
100
158
197
175
38
30
47
59
336
206
280
2573
7466
1941
493
1000
2501
1561
2644
264
465
641
558
6245
2842
3292
The table shows the input, output, product term, and programmable connection count
of each circuit used, as well as the domain groupings of the circuits. In sum-of-products
notation, each occurrence of a variable is called a literal. For a PAL, the number of
literals is equal to the number of programmable connections that are used in the array.
For a PLA, since the OR-plane is programmable, the number of programmable
connections in the array equals the number of literals plus the number of product terms.
The table lists the number of programmable connections used in a PLA implementation.
The number of programmable connections is similar to circuit size in that it will have an
38
effect on how well our algorithms perform, and it is therefore a consideration when
grouping circuits into domains.
5.1.2
Delay Model
We developed a delay model in order to evaluate the performance of the PLA and
PAL arrays: the model represents the propagation delay of a signal through the entire
array. We define the propagation delay as the time between the input reaching 50% of
VDD and the corresponding output reaching 50% of VDD: this is a common way to
measure propagation delay.
In CMOS design, a simple RC model is often used to obtain first-order estimates of
propagation delays. Using this model, a cutoff transistor is represented by an open
circuit, and an active transistor is represented by a closed switch in series with a resistor.
The delay is then based on the charging or discharging of some output capacitance in
response to a change in input voltage. Figure 24 shows this for an inverter circuit.
VDD
SWp
Rp
Cout
Vin
SWn
Vout
Rn
Figure 24. The RC model for an inverter [46]
Using this RC model, the propagation delay through a transistor can be estimated by
Equation 2 (derivation found in [46]). In this equation, X is a constant, R is the resistance
of the transistor, and Cout is the output capacitance. Since we will not be changing the
sizes of any of the transistors in our arrays, the value of the resistance R is constant for a
given transistor and can be absorbed into the constant X, giving us Equation 3. As this
39
equation states, the delay through any transistor in our PLA/PAL array is estimated to be
linearly proportional to the output capacitance.
t prop = X * R * Cout
(2)
t prop = X * Cout
(3)
Figure 25 highlights the worst-case propagation path in one of our pseudo-nMOS
PLAs. Notice that this figure differs from the previous pseudo-nMOS diagram, as there
are now buffers inserted to help drive the AND-plane and OR-plane. All AND-plane
array locations are laid out the same, and will contribute the same capacitance to the
corresponding signal path. This is also true of the locations in the OR-plane. We are
neglecting some very small capacitive variations that will be caused by differences in
location within the AND-plane or OR-plane, but these are small enough to be
insignificant. In Figure 25, the devices responsible for driving the signal path are
numbered so that we can examine them each individually. By summing the propagation
delays through each of these numbered items, we will obtain the propagation delay
through the PLA. There will be two propagation delays of interest, one for a rising
output and one for a falling output, and the analysis will be similar for each.
The PLA shown in Figure 25 has IN inputs, PT product terms, and OUT outputs.
The propagation delay through the input buffer, labeled 1 in the figure, is shown in
Equation 4. This buffer must drive the capacitance of one inverter (Cinv1), and PT array
locations (each Cloc). The inverter, labeled 2 in the diagram, must similarly drive PT
array locations (Equation 5). Next, either a pull-up or pull-down transistor (3a or 3b
respectively) must charge/discharge IN array locations of Cloc, plus Cbuf (Equation 6).
The buffer, labeled 4, must drive OUT array locations of Cloc (Equation 7). For the ORplane, again either a pull-up or pull-down transistor (5a or 5b respectively) must
charge/discharge PT array locations, plus the output inverter Cinv2 (Equation 8). The
output inverter, labeled 6, must then drive some Cout that we have fixed to a constant
value (Equation 9).
40
GND
GND
GND
VDD
GND
PT Product-Terms
5a
3a
P
3b
P
P
GND
P
4
5b
P
P
P
GND
P
2
VDD
6
1
out0
IN Inputs
in0
out1
OUT Outputs
Figure 25. The worst-case propagation path through a PLA is highlighted, and the devices driving
the path are number
t prop1 = X 1 * Cinv1 + X 2 * PT * Cloc
(4)
t prop 2 = X 3 * PT * Cloc
(5)
t prop 3 = X 4 * Cbuf + X 5 * IN * Cloc
(6)
t prop 4 = X 6 * OUT * Cloc
(7)
t prop 5 = X 7 * Cinv 2 + X 8 * PT * Cloc
(8)
t prop 6 = X 9 * Cout
(9)
Equations 4-9 represent the propagation delays through elements in the PLA array,
and can be summed to get the propagation delay through the entire PLA. We can do
some simplification by recognizing that Cinv1, Cbuf, Cinv2, and Cout are all independent of
PLA size, and are therefore constants. Summing the equations thus gives us Equation 10.
Cloc will also be a constant value, and this allows us to rewrite Equation 10 as Equation
11. Equation 11 displays that the delay through a PLA is linearly related to the number
41
of IN, PT, and OUT values in the device. We must now simply determine the constants
in Equation 11 for the respective cases of a rising and falling output value.
t prop = X 10 + (( X 2 + X 3 + X 8 ) * PT + X 5 * IN + X 6 * OUT ) * Cloc
(10)
t prop = X 11 + X 12 * PT + X 13 * IN + X 14 * OUT
(11)
In order to acquire the constants in Equation 11, we used Cadence’s layoutPlus to
create 39 PLAs with IN, PT, and OUT values that varied from 1 to 80. These PLAs were
then netlisted and simulated using hSpice, and the worst-case rise and fall times of the
arrays were acquired. Using this data, we then performed a linear fit and acquired the
constants in Equation 11. The models for the final rise- and fall-time propagation delays
for the PLAs are shown in Equations 12 and 13.
t rise _ PLA = (305 + 15.3 * IN + 15.0 * PT + 7.0 * OUT ) *10 −12 sec
(12)
t fall _ PLA = (345 + 16.0 * IN + 15.2 * PT + 4.1 * OUT ) *10 −12 sec
(13)
We next compared the predicted results to the actual results we obtained in order to
obtain the “error” imposed by these models. For the rise-time model, the worst-case error
was 12.8%, the average magnitude of the error was 2.1%, and the standard deviation of
the error was 3.0%. For the fall-time model, the worst-case error was 10.2%, the average
magnitude of the error was 2.6%, and the standard deviation of the error was 3.5%. As
can be seen, these models very accurately predict the timing through our PLA arrays.
Note that these equations are only valid because we are using constant device sizes
in our PLAs. This allows us to keep our design complexity at a reasonable level, at a cost
to the performance of our architectures. A production quality flow would use logical
effort to size the devices in order to maximize performance, which would have a
complicating effect on the area and delay models, and would also require a much more
significant design effort in terms of the creation of VLSI layouts.
The simplification of fixed device sizing is valid for our work because we are
interested in comparing the performance of domain-specific architectures versus domaingeneric architectures rather than obtaining the highest performance possible. Since our
fixed device sizing will affect the domain-specific and domain-generic architectures
42
similarly, our performance comparisons will still be accurate, despite the fact that the
overall performance may be an order of magnitude away from optimal for larger
architectures. The PLAs, PALs, and CPLDs that we create all use the same fixed device
sizings.
Determination of the propagation delays for PALs was very similar to that for PLAs.
The only difference is that PALs use fixed gates for the OR-plane (they actually use
NOR-gates since we do NOR-NOR style), so we needed to remove the variable
corresponding to output count and replace it with a variable that would take into account
the largest NOR-gate used in the PAL.
We allow our PALs to use NOR-gates of any size since we implement them in
pseudo-nMOS style, and this prevents us from having long charge/discharge paths. In
the worst case, a NOR-gate has a single transistor charging or discharging the output
node. Using the RC model, the output capacitance seen by the NOR-gate is roughly
linear in the size of the gate, because the number of transistors attached to the output
node is one more than the size of the NOR-gate (and any fanout and line capacitance will
be constant for our case).
We determined the constants for our PAL devices in the same method as for our
PLA devices. We created and simulated a total of 96 PALs, varying the IN and PT
values from 1 to 80, and varying the NOR-gate size from 3 to 7. We then performed a
linear fit to this data to acquire our constants.
Equations 14 and 15 model the
propagation delay for our PAL devices.
t rise _ PAL = (71 + 17.1 * IN + 6.3 * PT + 21.0 * MAX _ NOR _ SIZE ) *10 −12 sec
(14)
t fall _ PAL = (196 + 20.8 * IN + 8.1 * PT + 4.9 * MAX _ NOR _ SIZE ) *10 −12 sec
(15)
For the rise-time model, the worst-case error was 16.7%, the average magnitude of
the error was 5.1%, and the standard deviation of the error was 6.4%. For the fall-time
model, the worst-case error was 10.6%, the average error was 2.7%, and the standard
deviation of the error was 3.6%. One interesting thing to note about these equations is
43
that the rise time is heavily related to the size of the largest NOR-gate, since a wide
pseudo-nMOS NOR-gate will have a difficult time pulling up.
5.2 Totem-CPLD
In Chapter 7 we progress from domain-specific PLAs and PALs to domain-specific
CPLDs. Just as with PLAs and PALs, we first had to acquire circuits and group them
into domains. Using these domains, we created CPLD architectures that were evaluated
for performance, which required the creation of both area and delay models.
5.2.1
Circuits
We use PLAmap as the technology-mapper in our flow for creating domain-specific
CPLDs. While PLAmap’s algorithms will work on any circuit whose largest gate fits
within the specified PLA size, the program has been written such that it requires the input
circuits to be 2-bounded. We are thus restricted to the use of 2-bounded BLIF format
circuits (2-bounded means that no gates have more than 2 inputs).
Very few interesting circuits are available in BLIF format, so this necessitated some
pre-processing steps. Circuits are most easily obtained in HDL (Verilog or VHDL)
formats, so we developed a process that could take HDL files and transform them into 2bounded BLIF files. This process is shown in Figure 26.
The HDL files are first loaded into Altera’s Quartus 2 program. Quartus 2 performs
synthesis on the files, and dumps the designs into BLIF format (developers at Altera were
very helpful in providing this hidden functionality to us). SIS is then used to transform
the BLIF file into a 2-bounded network using the tech_decomp –a 1000 –o 1000 and
dmig –k 2 commands, followed by the sweep command.
Before the complete flow in Figure 26 was put together, we were performing
preliminary tests using some small circuits from the LGSynth93 suite. The functions of
these circuits are unknown, so we simply grouped them according to size into small,
medium, and large domains.
These circuits, along with their input, output, and 2-
bounded gate count, are shown in Table 2.
44
HDL Circuit
Quartus 2
BLIF Circuit
SIS
2-bounded BLIF
Figure 26. Flow for transforming circuits to BLIF format
Once the flow shown in Figure 26 was finalized, we used it to create five domains of
circuits.
Two of them, the combinational and sequential domains, consist of files
gathered from the LGSynth93 Benchmark Suite. These circuits were acquired in BLIF
format, and simply needed to be 2-bounded by SIS.
Table 2. The sample domains used for preliminary testing
small
misex1.blif
ldd.blif
i1.blif
decod.blif
pm1.blif
rd53.blif
IN
8
9
25
5
16
5
OUT GATES
7
60
19
106
13
43
16
50
3
73
3
101
medium
i4.blif
rd73.blif
apex7.blif
alu2.blif
9sym.blif
C880.blif
IN OUT GATES
192
6
246
7
3
457
49
37
253
10
6
455
9
1
395
60
26
352
large
IN OUT GATES
alu4.blif
14
8
2907
C7552.blif 207 107
2246
x1.blif
51
35
1888
cordic.blif 23
2
2814
i10.blif
257 224
2286
pair.blif
173 137
1525
The remaining three domains consist of floating-point, arithmetic, and encryption
files respectively. These files were accumulated from a variety of sources, including
OpenCores.org [47], from Altera software developers, as Quartus 2 megafunctions, and
from open source floating-point libraries [48]. All of these files were provided in HDL
format, and went through the entire flow shown in Figure 26 in order to be used in our
work.
The floating-point domain consists of several different units, including floating-point
multipliers, adders, and dividers. Also included is an LNS divider, an LNS multiplier,
45
LNS and floating-point square root calculators, and a floating-point to fixed-point format
converter.
The arithmetic domain consists of several different implementations of multipliers
and dividers, as well as a square root calculator and an adder/subtractor. The encryption
domain consists of the Cast, Crypton05, Magenta, Mars, Rijndael, and Twofish
encryption algorithms (all sans memories), all of which were recent competitors to
become the advanced encryption standard [49]. The domains are all summarized in
Table 3.
Table 3. The main domains used in our work
Comb
C1355
C17
C1908
C3540
C432
C499
C5315
C6288
C7552
C880
c8
cm138a
cm150a
cm151a
cm152a
cm162a
cm163a
cm42a
cm82a
cm85a
cmb
IN OUT GATES REGs
41
32
542
0
5
2
8
0
33
25
460
0
50
22
1045
0
36
7
175
0
41
32
406
0
178 123 1978
0
32
32
2350
0
207 107 2246
0
60
26
352
0
28
18
219
0
6
8
26
0
21
1
46
0
12
2
23
0
11
1
31
0
14
5
42
0
16
5
42
0
4
10
22
0
5
3
22
0
11
3
44
0
16
4
47
0
FP
FPMult
fpadd
fpmul
fpdiv
fpsqrt
lnsdiv
lnsmul
lnssqrt
float2fix
fp_mul
fp_sub
fp_add
IN
65
44
44
44
22
44
44
21
36
67
67
67
OUT GATES REGs
35
9895
698
22
2213
0
22
3687
0
22
5505
0
22
2675
0
22
340
0
22
331
0
22
24
0
34
704
142
57
8500
174
35
1786
199
35
1786
199
Seq
s1196
s1238
s208.1
s344
s349
s382
s400
s420.1
s444
s526
s526n
s838.1
s953
IN
15
15
11
10
10
4
4
19
4
4
4
35
17
OUT GATES REGs
14
481
18
14
552
18
1
77
8
11
122
15
11
125
15
6
150
21
6
160
21
1
165
16
6
173
21
6
241
21
6
272
21
1
341
32
23
369
29
Arith
MultAddShift
MultBooth2
MultBooth3
MultSeq
serial_divide_uu
Adder
AddSub
Mult
Div
AbsValue
IN
32
34
34
34
28
32
33
32
32
32
OUT GATES REGs
32
4392
0
33
759
37
33
2238
36
33
529
53
17
645
53
17
379
0
16
370
0
32
4361
0
32
3283
0
32
302
0
Enc
cast
crypton05
magenta
mars
rijndael
twofish
IN
298
388
452
389
388
261
OUT
166
260
387
172
132
196
GATES REGs
12934
301
6980
261
4876
713
23637 1071
11618
261
14784
517
In chapter 9, we will consider the question of how to intelligently add resources to
our CPLD architectures in order to support future circuits. The five main domains did
46
not provide as many data points as we desired, so we created an additional reduced
domain from each of the originals. These reduced domains are shown in Table 4.
Table 4. Additional domains used for Chapter 9 results
5.2.2
CombA
cm138a
cm150a
cm151a
cm152a
cm162a
cm163a
cm42a
cm82a
cm85a
cmb
IN
6
21
12
11
14
16
4
5
11
16
OUT GATES REGs
8
26
0
1
46
0
2
23
0
1
31
0
5
42
0
5
42
0
10
22
0
3
22
0
3
44
0
4
47
0
SeqA
s344
s349
s382
s400
s420.1
s444
IN
10
10
4
4
19
4
OUT GATES REGs
11
122
15
11
125
15
6
150
21
6
160
21
1
165
16
6
173
21
FPA
fpadd
fpmul
fpdiv
lnsdiv
lnsmul
IN
44
44
44
44
44
OUT GATES REGs
22
2213
0
22
3687
0
22
5505
0
22
340
0
22
331
0
ArithA
MultBooth2
MultSeq
serial_divide_uu
Adder
AddSub
AbsValue
IN
34
34
28
32
33
32
OUT GATES REGs
33
759
37
33
529
53
17
645
53
17
379
0
16
370
0
32
302
0
EncA
cast
rijndael
twofish
IN
298
388
261
OUT
166
132
196
GATES REGs
12934
301
11618
261
14784
517
Delay Model
Figure 27 represents the style of CPLD that our Chapter 7 tool flow creates, and the
figure highlights the critical path in terms of propagation delay. The same analysis that
was used to develop the delay model for the PLAs and PALs can be used to develop the
delay model for our CPLDs. The main difference is that we now need to consider the
interconnect network, as our path through the PLA must start and end in the CPLD
interconnect, as shown in the figure.
The signal starts by being switched from the interconnect fabric into a PLA input
track. This PLA input track is connected to each horizontal track in the interconnect. In
the interconnect, there is one horizontal track for each primary input from I/O, and one
track for each PLA output (of which there are PLA_COUNT * PLA_OUT). The signal
then propagates through the PLA, as our earlier analysis showed. After this, the PLA
must drive its output signal onto a vertical output track, which sees the same capacitive
elements as the PLA input track. Finally, the signal must be driven onto the proper
47
horizontal track in the interconnect. This horizontal track is connected to every PLA
input, of which there are PLA_IN*PLA_COUNT .
PLA
PLA
PLA
PLA
Interconnect
PLA
PLA
PLA
PLA
Figure 27. The delay through a PLA in our CPLD structure must start and end in the interconnect
The delay model for our CPLDs needs to account for these new terms.
We
developed the models in the same fashion as for the PLA and PAL arrays. We created 23
realistic CPLD architectures, varying IN from 2 to 12, PT from 2 to 36, OUT from 2 to 9,
PLA_COUNT (CT) from 2 to 9, PRIMARY_INPUT_COUNT (PI) from 2 to 18, then
performed linear fits to the results. The linear fit equations are shown in Equations 16
and 17, describing the propagation delay of a signal that starts in the interconnect,
traverses through a PLA, and returns to the interconnect.
t rise _ CPLD = (928 + 47.6 * IN + 3.7 * PT + 13.4 * OUT + 18.2 * PI + (8.63 * OUT + 32.5 * IN ) * CT ) *10 −12 sec
(16)
t fall _ CPLD = (867 + 46.0 * IN + 26.5 * PT + 8.7 * OUT + 5.4 * PI + (.5 * OUT + 23.8 * IN ) * CT ) *10 −12 sec
(17)
For our rise-time model, the worst-case error was 7.4%, the average magnitude of
the error was 2.0%, and the standard deviation of the error was 2.7%. For the fall-time
model, the worst-case error was 8.5%, the average magnitude of the error was 2.1%, and
the standard deviation of the error was 3.1%.
48
5.2.3
Area Model
Since we create the actual VLSI layout of the CPLDs that we specify, we can
determine the exact area required for the device. The area that we report for the CPLDs
is the area of the smallest rectangle that completely encompasses the CPLD architecture
along with any additional logic required for programming the memory elements in the
architecture.
49
6 Domain-Specific PLAs and PALs
The goal of our work is to automate the creation of domain-specific CPLD
architectures, where we define a CPLD as a collection of PLAs or PALs that are
interconnected by a crossbar. Using this simple definition, we can pinpoint two obvious
ways in which we can tailor a CPLD to a domain: by creating domain-specific
PLAs/PALs, and by creating domain-specific crossbar structures. This chapter addresses
the first of these two options, detailing our work involving the automatic creation of
domain-specific PLAs and PALs.
We are ultimately examining these PLAs and PALs in order to determine how they
can be best utilized in a domain-specific CPLD that is designed for SoC applications. To
achieve this, we decided to examine the usefulness of single PLA and PAL devices
within the same framework – by trying to tailor the arrays to a specific domain for use in
SoC. By examining the ways in which we can tailor individual PLAs/PALs to a domain,
we are providing a building block for our domain-specific CPLD explorations as well as
determining the feasibility of using PLAs and PALs as stand-alone reconfigurable
structures in SoC designs.
6.1 Tool Flow
The domain-specific PLAs/PALs are created using the flow shown in Figure 28.
The input from the customer is a specification of the target domain, containing a set of
circuits (in .pla format) that the target architecture must support. In addition to the
circuits, there may be a combination of delay or area requirements that the architecture
will need to meet.
The circuits are first processed by ESPRESSO in order to minimize the number of
product terms and literals that they contain. This allows us to implement the circuits
50
using less silicon. The resulting minimized circuits are then fed into the Architecture
Generator, which attempts to create the smallest single PLA or PAL array that is capable
of supporting every circuit. Only one circuit must be supported at any given time. The
Architecture Generator outputs information specifying the chosen PLA or PAL array, and
also provides configuration files for configuring each circuit on the specified PLA or
PAL. Additionally, any delay or area requirements provided by the customer can be
checked after the Architecture Generator creates the array, as we have accurate models
for calculating array delay and area.
Circuits
ESPRESSO
Minimized
Sum-of-Products
Circuits
Architecture
Generator
PLA/PAL
Description
Layout
Generator
Layout for
Reconfigurable
PLA/PAL
Configuration
Files
Figure 28. PLA/PAL Generation Tool Flow
After the Architecture Generator creates an array specification, the specification is
fed to the Layout Generator, which creates a full layout of the array in the native TSMC
.18µ process. This layout includes the PAL/PLA array as well as the hardware necessary
for programming the array.
51
6.2 Architecture Generator
The Architecture Generator must read in multiple circuits and create a PLA/PAL
array capable of supporting all of the circuits. The tool is written in C++.
The goal of the Architecture Generator is to map all the circuits into an array that is
of minimum size and which has as few programmable connections as are necessary. For
a PLA, minimizing the number of inputs, outputs, and product terms in the array is
actually trivial, as each of them is simply the maximum occurrence seen across the set of
circuits. For a PAL we minimize the number of inputs and outputs the same way as for a
PLA, and we minimize the number of product terms in the array by making each output
OR gate as small as is possible.
Having minimized the number of inputs, outputs, and product terms in the array, the
next goal is to minimize the number of programmable connections that are necessary in
order to support each circuit. This is where we need an intelligent algorithm.
Figure 29 displays the problem that we face when trying to minimize the number of
programmable connections that are necessary in the array. In this example we are trying
to map two circuits to the same array (for the sake of this example the circuits, grey and
black, implement the same function). A random mapping of the product terms (Figure
29, left) is shown to require 23 programmable connections, while an intelligent mapping
(Figure 29, right) is shown to require only 12 programmable connections - a 48%
reduction.
In this simple example the circuits happen to be the same, so we were able to obtain
a perfect mapping. Circuits that are not identical will also have optimal mappings, which
will result in a reduced number of programmable connections. Having fewer connections
will allow us to compact the array in order to save area, and it will lower the capacitance,
which will make our array faster.
The optimal mapping of product terms for two circuits can be found fairly
efficiently. We first apply a cost of 1 to locations where we require a programmable
connection, and a cost of 0 to locations where we do not require programmable
connections.
This accurately represents our problem because more programmable
52
connections will yield a higher cost – which directly represents the higher area and delay
values that the array will produce.
F0
X0
X1
X2
X3
F0
F1
X0
X1
X2
F1
X3
Figure 29. The left PLA shows two circuits mapped randomly, requiring 23 programmable
connections. On the right they are mapped intelligently, requiring only 12 connections
Using this 0/1 cost model, the cost of each possible product-term matching between
circuit A and B equals the number of programmable connections required by the pairing.
We must now simply pair each of the m product terms from circuit A with a product term
in circuit B such that we minimize the overall cost. This will give a mapping that uses as
few programmable connections as possible: an optimal mapping.
This problem is equivalent to the “Optimal Assignment Problem”, and an algorithm
developed by Kuhn and Munkres can be used to find the optimal assignment in O(m4),
where m is the number of product terms [50] (see Appendix A for treatment). This
algorithm works for two circuits, but our problem is to map n circuits onto the array, and
n is likely to be greater than two. Our literature searches have found no algorithms that
can efficiently find the optimal matching given more than two circuits.
One possibility, however, is to perform the Kuhn/Munkres algorithm on two circuits
at a time, and to use a tree structure to combine the mappings. This can be done a couple
ways, as shown in Figure 30. In this example we show two different ways of mapping
four circuits (N0 – N3) together. The greedy nature of this formulation, however, is
likely to provide poor mappings. An example of this is shown in Figure 31, which
53
displays a poor result that is obtained by using the Kuhn/Munkres algorithm in a tree
fashion for three circuits that each have two product terms.
N’’’
N’’
N’’’
N2
N’
N0
N3
N1
N’
N0
N’’
N1
N2
N3
Figure 30. Tree options for using the Kuhn/Munkres algorithm
We have chosen not to implement the Kuhn/Munkres algorithm for mapping circuits
to an array, largely because simulated annealing has proven to be very successful this
application.
The algorithm’s goal is to minimize the number of programmable
connections required in the array. We define a basic “move” as being the swapping of
two product-term rows within a circuit (we will introduce more complicated moves later),
and the “cost” of a mapping is the number of programmable bits that it requires. The
traditional annealing concept of a bounding box has no notion here, as our metric is not
distance dependent, so any product term can swap with any other product term from the
same circuit in a given move. For our annealing we use the temperature schedules
published in [51].
The development of a cost function requires serious consideration, as it will be the
only way in which the annealer can measure circuit placements.
The previously
mentioned cost function, in which we applied a cost of 1 to locations requiring a
programmable bit and a cost of 0 to locations not requiring a bit, initially seems
reasonable for our annealer. But looking deeper, the use of a simple 0/1 cost function
would actually hide a lot of useful information from the annealer. The degree to which a
programmable bit is required (how many circuits are using the array location) is also
useful information, as it can tell the annealer how close we are to removing a
programmable connection.
54
Circuit
Product Terms
Cost
N0
6
N1
6
N2
8
N’
9
N’’
N’
N0
N’’
13
Best
10
N2
N1
Figure 31. Suboptimality introduced by greedily combining the product terms in N0, N1, and N2 as
shown. The greedy use of Kuhn/Munkres requires 13 programmable locations (N’’), while the
optimal solution (Best) uses only 10
Figure 32 displays this notion.
In this example, we have one programmable
connection used by two circuits and another connection used by five circuits. Both
locations require a programmable bit, but it would be much wiser to move to situation A
than to situation B, because situation A brings us closer to freeing up a connection.
The cost function that we developed captures this subtlety by adding diminishing
costs to each circuit that uses a programmable connection. If only one circuit is using a
connection the cost is 1; if two circuits use a connection it costs 1.5; three circuits is 1.75,
then 1.875, 1.9375, and so on. Referring again to Figure 32 and using this cost function,
moving to A is now a cost of -.45 (a good move) while moving to B is a cost of .19,
which is a bad move. The cost function is shown in Equation 18, where x is the number
of circuits that are using a position. As seen, each additional circuit that loads a position
55
incurs a decreasing cost, such that going from 7 to 8 is much cheaper than going from 1
to 2, for example.
2
1
6
A)
5
3
4
B)
Figure 32. Moving to situation A puts us closer to removing a programmable connection
Because PALs and PLAs are structurally different, we need an annealing algorithm
that can work on both types of arrays. Additionally, we don’t know what hardware might
exist on the SoC at the periphery of our arrays. The existence of crossbars at the inputs
and outputs to our arrays would allow us to permute the input and output locations
between circuit mappings. For example, circuit1 might want the leftmost array input to
be in0 while circuit2 wants it to be in3.
An external crossbar would allow us to
accommodate both circuits and decrease the area and delay of the required array, giving
the user further benefits.
COST = 2 − .5 ( x −1)
(18)
Thus we are presented with a need for four annealing scenarios: using a PLA with
fixed I/O positions, using a PLA with variable I/O positions, using a PAL with fixed I/O
positions, and using a PAL with variable I/O positions.
The differences between the annealing scenarios are shown in Figure 33. Given a
PLA with fixed I/O positions, the only moves that we can make are swaps of product
terms within a circuit (A). Given variable I/O positions (B), however, we can also make
swaps between the inputs of a circuit or between the outputs of a circuit, which will likely
provide us with further reduction of the programmable connection cost.
56
The outputs in a PAL put restrictions on where the product terms can be located, so
the PAL with fixed I/O positions only allows product terms to be swapped within a given
output OR gate (C). In the PAL where we can vary the I/O positions, we actually order
the outputs by size (number of product terms) for each circuit such that the larger output
gates appear at the bottom. This minimizes the overall sizes of the output OR gates. We
are then permitted to make three types of moves: swapping input positions, swapping
product-term positions, and swapping output positions of equal size, as shown in (D).
f0
f1
f0
X0
X1
X2
B
X3
X0
X1
X2
f1
A
X3
f0
f0
f1
f1
X0
X1
X2
X3
D
X0
X1
X2
X3
C
Figure 33. Allowable annealing moves for the four scenarios
For the PLA with variable I/O positions, 50% of the moves are product-term swaps
and 50% are I/O swaps, with the ratio of input to output swaps equal to the ratio of inputs
to outputs. For the PAL with variable I/O positions, 50% of the moves are product terms
and 50% are input moves, with the output moves not currently considered because early
results showed no gain from including them. The choice of performing 50% productterm and 50% I/O moves was somewhat arbitrary: we wanted to ensure that both of these
57
dimensions were adequately explored, especially since moves in one of these dimensions
can allow new explorations in the other dimension, but providing exactly half the moves
to each space was an arbitrary decision.
The results that will be presented later,
particularly in Table 6, show that our choice provides quality results.
When the Architecture Generator is done annealing, it creates a file that completely
describes the array. This file is then read by the Layout Generator so that a layout of the
array can be created. The Architecture Generator also outputs a configuration file for
each circuit so that the circuit can be implemented on the created array.
6.3 Layout Generator
The Layout Generator is responsible for taking the array description created by the
Architecture Generator and turning it into a full layout. It does this by combining
instances of pre-made layout cells in order to make a larger design. After the cells are
laid down, a compaction tool is optionally run on the design in order to create a more
compact layout. The Layout Generator runs in Cadence’s LayoutPlus environment, and
uses a SKILL routine that was written by Shawn Phillips [19]. Designs are made in the
native TSMC .18µ process.
Figure 34 shows two PLAs that our Layout Generator created: the first PLA displays
the compactness of our layouts, while the second array gives an example of the array
depopulation that our algorithm achieves. Very small arrays have been shown for clarity,
but the arrays we create are often orders of magnitude larger. Pre-made cells exist for
every part of a PLA or PAL array, including the decoder logic needed to program the
arrays. The Layout Generator simply puts together these pre-made layout pieces as
specified by the Architecture Generator, thereby creating a full layout. The input file
created by the Architecture Generator contains cell names and layout positions, and the
SKILL routine must simply iteratively place the units as it is instructed.
58
Figure 34. PLAs are created by tiling pre-made, optimized layout cells. The top PLA displays a full
array, while the bottom PLA displays the effect of array depopulation
59
Currently, the PLAs and PALs are implemented using a pseudo-nMOS logic style
(see Figure 35). PALs and PLAs are well suited to pseudo-nMOS logic because the array
locations need only consist of small pull-down transistors controlled by a programmable
bit, and only pull-up transistors are needed at the edges of the arrays. The programmable
bits (not shown) are in series with the pull-down transistors in the arrays. The pseudonMOS PLAs and PALs will have small layouts, and we have found that the increased
delay that comes from using this logic style is quite acceptable.
GND
GND
GND
VDD
GND
GND
GND
VDD
X0
X0
X1
X1
f0
f1
Figure 35. A PLA created using pseudo-nMOS
6.4 Methodology
The use of PALs and PLAs restricts us to the use of .pla format circuits. The first
source of circuits is the ESPRESSO suite (the same circuits on which the ESPRESSO
algorithm was tested).
A second set of circuits comes from the benchmark suite
compiled by the Logic Synthesis Workshop of 1993 (LGSynth93). As a whole, these
circuits are commonly used in research on programmable logic arrays. The circuits are
generally fairly small, but this suits our needs as we are currently only using single arrays
to support them.
Table 5 gives information on the main circuits that we used for gathering results,
including the number of inputs, outputs, product terms, and programmable connections.
In sum-of-products notation, each occurrence of a variable is called a literal. For a PAL,
the number of literals is equal to the number of programmable connections that are
60
needed in the array. For a PLA one must add the number of literals to the number of
product terms in the equations in order to obtain the total number of programmable
connections in the array. The connection counts in Table 5 are for PLA representations.
The circuits are grouped according to size, as this will be a factor in how well our
algorithms perform.
Table 5. The circuits used, with their information and groupings
Group
1
2
3
4
Circuit
ti
xparc
b2
shift
b10
table5.pla
misex3c.pla
table3.pla
newcpla1
tms
m2
exp
seq
apex1
apex3
Inputs Outputs P.Terms Connections
47
41
16
19
15
17
14
14
9
8
8
8
41
45
54
72
73
17
16
11
15
14
14
16
16
16
18
35
45
50
213
254
106
100
100
158
197
175
38
30
47
59
336
206
280
2573
7466
1941
493
1000
2501
1561
2644
264
465
641
558
6245
2842
3292
6.5 Results
6.5.1
Architecture Generator
The Architecture Generator uses simulated annealing to reduce the total number of
programmable bits that the resultant array will require. While tools like VPR can have
annealing results where costs are reduced by orders of magnitude, such large cost
improvements are not possible for our annealer because our cost function is very
different.
In actuality, the best cost improvement that our annealer can obtain is bounded, as
shown by Figure 36. In part A we have the worst possible placement of the two circuits,
and in part B we have the best possible placement. Notice that our cost only goes from
20 to 15, while the total number of actual bits we require goes from 20 to 10. These are
61
actually the bounds of a two circuit anneal: the cost function can never improve more
than 25% and the number of programming bits required can never improve more than
50%.
Similarly, with three circuits the best improvement in cost function occurs when
three circuits are initially mapped to unique locations, but are all mapped onto the same
locations in the final placement. For this case the maximum cost function improvement
is 41.7%, while the optimal reduction in the number of programming bits is 66.7%.
Similar analysis can be performed on groups of four or more circuits. Since reducing the
number of bits is our final objective, the results that we present will show the number of
bits required for a mapping rather than the annealing cost.
The problem of determining the minimum possible programming bit cost of a circuit
mapping is very difficult. As previously mentioned, there is an O(n4) exact algorithm for
determining the minimum cost of a two circuit mapping, but we have chosen not
implement the exact algorithm because we will often be dealing with more than two
circuits.
A
Cost = 20
Bits = 20
B
Cost = 15
Bits = 10
Figure 36. The best possible cost reduction for two circuits is 25%, which is 50% fewer
programmable connections
Because of this, however, we do not have a method for determining the optimal bit
cost of an arbitrary mapping. But we can know the optimal mapping of a circuit mapped
with itself: it is simply the number of connections in the circuit, as all the connections
from the first circuit should map to the same locations as the connections from the second
62
circuit. This can be done with any quantity of the same circuit, and the optimal solution
will always remain the same.
By doing this we can see how close our annealing
algorithms come to an optimal mapping.Table 6 shows the results obtained from applying
this self-mapping test to several circuits using each of the four algorithms: PLA-fixed,
PLA-variable, PAL-fixed, and PAL-variable. The table shows that when two circuits are
mapped with themselves using the PLA-fixed algorithm that the final mapping is always
optimal. The PLA-variable algorithm had difficulty with only one circuit, shift, which
was 15.21% from optimal. Note that for this example the random placement (not shown)
was 92.49% worse than optimal, so our algorithm still showed major gains.
Table 6. Running the algorithms on multiple occurrences of the same circuit. The "Error" column
denotes deviation from the optimal result
PAL-Var.
PAL-Fixed
PLA-Var.
PLA-Fixed
Alg. Circuit
# Circuits Optimal
shift
2
493
table5.pla
2
2501
newcpla1
2
264
m2
2
641
tms
2
465
shift
2
493
table5.pla
2
2501
newcpla1
2
264
m2
2
641
tms
2
465
shift
2
399
table5.pla
2
7257
newcpla1
2
325
m2
2
2215
tms
2
1804
shift
2
399
table5.pla
2
7257
newcpla1
2
325
m2
2
2215
tms
2
1804
Achieved
493
2501
264
641
465
568
2501
264
641
465
399
7257
325
2215
1804
452
7257
325
2215
1804
Error
0.00%
0.00%
0.00%
0.00%
0.00%
15.21%
0.00%
0.00%
0.00%
0.00%
0.00%
0.00%
0.00%
0.00%
0.00%
13.28%
0.00%
0.00%
0.00%
0.00%
For the PAL-fixed algorithm, all of the tests returned an optimal result. The PALvariable algorithm had a similar result to the PLA-variable algorithm, as the shift circuit
was only able to get 13.28% from optimal (vs. 92.23% from optimal for a random
placement). The near optimal results shown in Table 6 give us confidence that our
63
annealing algorithms should return high quality mappings for arbitrary circuit mappings
as well.
Shift was the only circuit in Table 6 that displayed suboptimal performance, so we
took a closer look to see what was causing this behavior. The shift circuit has 19 inputs,
16 outputs, and 100 product terms, and all of product terms follow a very regular pattern
(Figure 37 shows a representative portion of the circuit). The leftmost 3 input lines of the
circuit are heavily populated (between 42 to 48 connections per input), while the
remaining 16 input lines are all very sparsely populated, containing at most 8 connections
on a single input line. The output lines are also sparsely populated, as no output line
contains more than 8 connections (and most of them contain exactly 8 connections).
Additionally, 98 of the 100 product terms have between 2 and 4 connections on them.
Inputs
Outputs
Figure 37. A representative portion of the shift circuit. The leftmost three input lines are heavily
populated, but all other lines are very sparsely populated
For the variable algorithms, the annealer begins with circuits whose product-term,
input, and output lines have been randomly permuted. In our test runs with the shift
64
circuit, the random initial state makes it nearly impossible to determine which productterm, input, or output lines from circuit1 match which product-term, input, or output lines
from circuit2, because so many of these lines have an equivalent number of connections
on them. The only lines that are decipherable are the first three input lines, as they have
an increased number of connections on them.
I believe that the reason the shift algorithm performed suboptimally is that most of
the product-term, input, and output lines look alike. In both of the suboptimal cases in
Table 6, the second and third input lines were swapped for one of the circuits in the final
mappings. Considering that the remaining input and output lines were probably quite
randomly permuted and largely indecipherable from each other when this move took
place, it is really no surprise that reversing the second and third input lines could have
resulted in a sustainable move.
Once these lines were reversed, the annealer then
optimized the rest of the product-term, input, and output lines according. The resulting
mapping displayed many product-term lines that were perfectly matched between the two
circuits, despite the fact that the specific product-term, input, and output lines were not
mapped to their perfect partners from the other circuit. I believe that the main concept to
take away from this result is that, if two circuits are so similar that many of their productterm, input, or output lines look alike, then the resulting mapping may be slightly less
optimal than if the perfect matchings between these lines were more clear.
Another thing to notice in Table 6 is that the PAL-fixed and PAL-variable algorithms
often require many more programmable connections than the PLA algorithms on the
same circuits (see the tms and table5.pla circuits). This is because, in its default state,
ESPRESSO attempts to assign product terms to as many outputs as possible in order to
reduce the final PLA size. This results in bad behavior for a PAL, as PALs use fixed
output gates and any output sharing must be unrolled. This can cause the number of
product terms in a PAL to be many times worse than in a PLA for the same circuits.
A solution to this problem would be to run ESPRESSO on each output individually
and concatenate the results in order to come up with an efficient PAL representation. We
did not implement this in practice, however, because we knew that we were going to be
65
using PLAs (rather than PALs) in our CPLD implementations, and we chose to put our
efforts elsewhere. Any future work considering the elimination of programming points in
a PAL should perform this step, however, to obtain the best possible PAL
implementations.
Table 7 shows the results of running the PLA-fixed and PLA-variable algorithms on
the different circuit groups from Table 5. The reduction in bit cost is the difference in the
number of programmable connections needed between a random mapping of the circuits
and a mapping performed by the specified algorithm. In the table, all possible 2-circuit
mappings were run for each specific group and the results were then averaged. The same
was done for all possible 3-circuit mappings, 4-circuit, etc., up to the number of circuits
in the group.
Table 7. Average improvement in programming bits for PLA-Fixed and PLA-Variable algorithms
over random placement as a function of circuit count
Group
1
2
3
4
# Circuits
2
2
3
4
5
6
2
3
4
2
3
PLA-Fixed
3.62%
10.19%
16.26%
20.20%
23.15%
25.64%
9.41%
14.33%
17.79%
3.41%
6.01%
PLA-Var.
14.27%
14.52%
22.97%
28.52%
20.07%
35.46%
16.44%
25.12%
29.81%
19.02%
28.83%
There are some interesting things to note from the results in Table 7. Firstly, the
PLA-variable algorithm always finds a better final mapping than the PLA-fixed
algorithm. This is to be expected, as the permuting of inputs and outputs in the PLAvariable algorithm gives the annealer more freedom. The resulting solution space is
much larger for the variable algorithm than the fixed algorithm, and it is intuitive that the
annealer would find a better mapping given a larger search space.
The practical
implications of this are that an SoC designer will acquire better area and delay results
from our reconfigurable arrays by supplying external hardware to support input and
66
output permutations – although the area and delay overhead of the crossbar would need to
be considered to see if the overall area and delay performance is still improved.
Another thing to notice is that the reduction always increases as the number of
circuits being mapped increases. This, too, is as we would expect, as adding more
circuits to a mapping would increase the amount of initial disorder, while the final
mapping is always close to optimally ordered. Note that this does not say that we end up
with fewer connections if we have more circuits, it only says that we reduce a greater
number of connections from a random mapping. The trends shown in Table 7 for the
PLA algorithms hold for the PAL algorithms as well.
Another important concept is how well circuits match each other, as higher
reductions will be possible when the circuits being mapped have similar sizes or a similar
number of connections. With regards to array size, any circuits that are far larger than
another circuit will dominate the resulting size of the PLA or PAL array, and we will be
left with a large amount of space that is used by only one or few circuits, resulting in poor
reduction. If the size of the resulting array is close to the sizes of each circuit being
mapped to it then we would expect the array to be well utilized by all circuits. This is
shown in Figure 38, which shows the bit reduction vs. array utilization. The array
utilization is defined as the percentage of the final PLA’s area that is being utilized by
both circuits. The PLA-variable algorithm was used for these results, and the circuit pairs
were chosen at random from the entire ESPRESSO and LGSynth93 benchmark suites.
Mapping circuits with a similar number of connections also results in better
reductions. If circuit A has far more connections than circuit B then the total number of
connections needed will be dominated by circuit A: even if we map all of the connections
from circuit B onto locations used by circuit A we will see a small reduction percentage
because B contained so few of the overall connections. It is intuitive that having a
similar number of connections in the circuits being mapped will allow a higher
percentage of the overall programmable connections to be removed. This is shown in
Figure 39, where we used the PLA-variable algorithm on random circuit pairs from the
67
benchmark suites. A connection count of 80% means that the smaller circuit has 80% of
the number of connections that the larger circuit has.
25.00%
Bit Reduction
20.00%
15.00%
10.00%
5.00%
0.00%
0.00%
20.00%
40.00%
60.00%
80.00% 100.00%
Array Utilization
Figure 38. The bit reduction obtained vs. percent array utilization for random circuit pairs
25.00%
Bit Reduction
20.00%
15.00%
10.00%
5.00%
0.00%
0.00%
20.00%
40.00%
60.00%
80.00% 100.00%
Connection Count Agreement
Figure 39. The bit reduction obtained vs. connection count agreement for random circuit pairs
68
One reason that we’re trying hard to reduce the number of programmable bits is that
it will allow us to use less silicon, and this will allow us to have a smaller array. The
reduced array we create will be the same size but with empty space where programmable
bits are not needed, and running a compactor on the layout will allow us to obtain more
area savings. Additionally, the removed silicon will result in delay gains.
We used hspice to develop delay models of both the PLA and PAL arrays that we
create. Table 8 shows the delay and programmable bit results obtained for several runs of
the algorithms, along with average improvements over the full arrays and the random
arrays (circuits randomly placed and unneeded connections removed).
All algorithms show improvements in delay over the full and random placements.
Additionally, as more circuits are mapped to the array, the delay gains tend to increase.
The PLA-Variable algorithm does somewhat better than the PLA-Fixed algorithm
with respect to programmable connections, but this does not scale to delay, as the PLA-V
and PLA-F algorithms perform very similarly. This is because the algorithms have no
concept of path criticality, and the connections that they are able to remove are often
from non-critical paths. Thus, further reduction in connections does not directly lead to
further reduction in delay.
Table 8. Reductions obtained in number of programmable bits and delay for PLA/PAL algorithms
Circuits
misex3c.pla, table3.pla
alu2, f51m
ti, xparc
b2, shift, b10
newcpla1, tms, m2
gary, b10, in2, dist
newcpla1, tms, m2, exp
gary, shift, in2, b2, dist
b2, shift, b10, table5.pla,
misex3c.pla, table3.pla
Average Improvement
Over Full
Average Improvement
Over Random
PLA Algorithms
Programmable Bits
Full Rand. PLA-F PLA-V Full
8274
3675
3165
2998
3620
2156
683
557
538
1708
42418 9796
9452
8207
5343
5830
2890
2510
2270
2329
1598
1000
862
779
1268
6664
3458
2658
2026
2760
2124
1319
1072
956
1459
7480
4410
3516
2960
2785
PAL Algorithms
Delay (ps)
Programmable Bits
Rand. PLA-F PLA-V Full Rand. PAL-F PAL-V Full
3089
2901
2905 19936 8611
8155
7739
8505
1081
916
908
2220
593
544
486
1627
4578
4561
4512 269686 55957 55548 51610 33696
2065
1999
1937 37620 10150 9627
9098 10557
1236
1216
1208
6984
3437
2998
2527
3993
2658
2610
2569 15010 5710
4852
3298
4800
1420
1323
1372
7218
3954
3276
2679
4095
2727
2646
2615 39216 12941 11437 9751 10887
18321
3718
-
6600
4914
4521
53.3% 61.4% 65.8%
-
16.7% 25.9%
4015
-
3009
3118
92796 21081 16987 13453 15692 10847
10.6% 16.0% 16.1%
-
6.4%
6.5%
Delay (ps)
Rand. PAL-F PAL-V
7218
6846
6760
969
914
866
25908 25715 25409
6798
6581
6544
3906
3831
3278
3715
3392
3190
4005
3940
3406
7794
7289
6741
-
65.0% 68.9% 73.5%
-
10.6% 23.1%
-
9514
8513
22.3% 26.0% 31.3%
-
5.1%
11.4%
The PAL-Variable algorithm performs better than the PAL-Fixed algorithm in terms
of both programmable connections and delay.
This is largely because the PAL-V
algorithm is able to permute the outputs (and therefore the output OR-gates), resulting in
smaller OR-gates in many circumstances.
69
On average, the PLA-Fixed and PLA-Variable algorithms improved upon the delay
of a full PLA array by 16.0% and 16.1% respectively. The PAL-Fixed and PAL-Variable
algorithms improved upon the delay of a full PAL array by 26.0% and 31.3%
respectively. Overall, delay improvements of 5.0% to 11.4% were achieved vs. a random
placement.
6.5.2
Layout Generator
In the Architecture Generator, unneeded programmable connections are removed
from the PLA and PAL arrays that we create. This leaves the arrays full of randomly
distributed empty space that a compaction tool should be able to leverage in order to
make a smaller, more compact layout.
We took several PLA and PAL layouts and applied Cadence’s compactor to them,
but found that the compactor was unable to reduce the area of any of the arrays (and in
fact resulted in a larger area implementation in all cases). Applying the compactor to the
depopulated PLA from Figure 34 resulted in the layout shown in Figure 40.
The failure of the compactor is due to the high regularity of PLA and PAL arrays.
The compactor iteratively attempts to compact in the vertical and horizontal directions,
but PLAs and PALs have strong vertical and horizontal relationships between array
elements which prevent the compactor from making any headway.
One interesting note is that the compacted image in Figure 40 actually does not
conform to all of the design rules for the layout process.
We were unable to get
Cadence’s compactor to fully adhere to the design rules while compacting, so the
resulting compacted PLAs are probably a lower bound for what a legal compaction could
have achieved.
6.6 Conclusions
This chapter presented our work in automating the creation of domain-specific PLAs
and PALs, including an Architecture Generator that that efficiently maps circuits to a
PLA or PAL array and a Layout Generator which tiles pre-made layouts in order to create
70
a full VLSI layout of the PLA or PAL array. Delay improvements of 16% to 31% were
achieved over full arrays, but compaction was unable to provide us with any area
improvements. The largest improvements were obtained when the PLA/PAL inputs and
outputs were permutable, but an SoC designer would need to examine the overhead of
input and output crossbars to and from the arrays in order to decide whether an area or
delay gain would actually be achieved.
Figure 40. The result of applying a compactor to the depopulated PLA from Figure 34. This layout
is actually 5% larger than the uncompacted layout in Figure 34
If the PLA or PAL array being created will only be used to implement the circuits
that were used to design the array, then depopulating the arrays is a good idea, as it will
provide delay gains over a fully populated array. If other designs are going to be
implemented on the array, however, the removal of programmable connections will make
71
it unlikely that a future circuit would successfully map to the array. Thus the removal of
programmable connections from a PLA or PAL is not suggested if unknown circuits are
going to be mapped to the array in the future.
Generally speaking, realistic PLA and PAL arrays are limited in size due to area and
delay considerations, and cannot support very large circuits. When performing large
amounts of computation, better performance can be achieved through the use of
architectures that utilize a large number of smaller functional units. These considerations
make standalone PLA or PAL arrays unattractive as reconfigurable solutions for SoC
devices.
72
7 Logic in Domain-Specific CPLDs
In the previous chapter we examined the methods in which a stand-alone PLA or
PAL can be tailored to an application domain. This chapter will build upon that work by
combining multiple of these units into a CPLD structure. The focus of this chapter is on
the CPLD logic elements, so in order to isolate the logic from routing
considerations/restrictions we will be connecting the elements through a full crossbar. In
the next chapter we will then focus on ways to modify the CPLD’s interconnect structure.
When progressing to CPLDs, we chose to make a decision between using either
PLAs or PALs as the logic element for the architectures. The majority of the techmapping algorithms available for product-term architectures map to PLA arrays rather
than PAL arrays. This includes an algorithm called PLAmap (see chapter 2), which is
currently the best academic tech-mapping algorithm for PLA-based CPLDs. While it
would be possible to modify one of these PLA-based algorithms to map to PAL arrays, it
is unclear whether such an undertaking would result in architectures that are better than
what we can get using PLAs, so we determined that our time would be better spent
exploring PLA-based CPLD architectures using existing tech-mapping tools.
The
decision to use PLAs has some useful side effects as well, including a smaller design
space to explore (because PALs must have their output OR-gate sizings specified), and
greater flexibility due to fully programmable OR-planes. For the rest of this dissertation
we will only be considering PLAs as the logic units in CPLDs.
In the previous chapter, the majority of our effort was put into removing unneeded
programmable connections in the arrays – a process which we ultimately concluded to be
too detrimental to the flexibility of the stand-alone devices. This is also true when we try
to combine multiple PLAs into a CPLD: reducing the connectivity in the logic elements
will make it difficult or impossible to map future designs to the architecture. Because of
73
this, removing programmable connections from the PLA arrays is no longer considered.
This chapter details the algorithms used to tailor a CPLD to an application domain by
varying the input capacity, product-term capacity, and output capacity of the PLAs within
the CPLD architecture. This represents a complete flow (from SoC designer through our
automated tools and back to the designer) for full-crossbar-based CPLDs.
7.1 Tool Flow
Figure 41 shows the tool flow used for tailoring CPLD logic to a particular
application domain. The input from the SoC designer is a specification of the target
domain, containing a set of circuits that the architecture must support. These circuits are
fed into an Architecture Generator, which will find a CPLD architecture that provides
good performance for the selected domain. The architecture description outputted by the
Architecture Generator is then sent to a Layout Generator, which creates a full VLSI
layout of the specified CPLD architecture in the TSMC .18µ process.
Circuits
Architecture Generator
Architecture
Layout Generator
Layout
Figure 41. Totem-CPLD Tool Flow
7.2 Architecture Generator
The Architecture Generator is responsible for reading in multiple circuits and finding
a CPLD architecture that supports the circuits efficiently. Search algorithms are used to
74
make calls to PLAmap, after which the results are analyzed according to area and delay
models that we have developed. The algorithms then make a decision to either make
further calls to PLAmap, or to exit and use the best CPLD architecture that has been
found. This is shown graphically in Figure 42. PLAmap assumes full connectivity
between the PLAs, and the Architecture Generator accommodates this by connecting all
the PLAs through a full crossbar.
Circuits
Search Algorithm
CPLD Specs
Architecture, Stats
PLAmap
Architecture
Figure 42. Architecture Generator
The Architecture Generator is responsible for finding a PLA size that leads to an
efficient CPLD architecture for the given domain. PLAs are specified by their number of
inputs (IN), product terms (PT), and outputs (OUT), so the search space for the
Architecture Generator is three-dimensional.
Searching the entire 3-D space is not
viable, as calls to PLAmap can take on the order of hours for larger circuits, and our
ultimate goal is to find a suitable CPLD architecture in a matter of hours or days. Also,
for each PLA architecture on which we test a domain, PLAmap must be called once for
each circuit in the domain.
Clearly, minimizing the number of PLAmap calls is
important to our runtime. Effective algorithms such as simulated annealing and particle
swarm require too much time for our scenario, and smart algorithms will be required if
we wish to acquire good results in the 3-D space using relatively few data points.
75
In order to gain some intuition about the search space, we ran five random
LGSynth93 circuits through PLAmap and acquired a coarse representation of the 3-D
space for each circuit. We tested PLAs with input (IN) values of 4, 8, 12, 16, 20, 24, and
28, product term (PT) values of .5*IN, 1*IN, 2*IN, 3*IN, and 4*IN, and output (OUT)
values of .25*IN, .5*IN, .75*IN, and 1*IN. All possible permutations of these values
were tested, so a total of 140 PLA sizes were tested for each circuit. The area-delay
product for each test case was acquired, and the geometric mean was calculated for each
PLA size across the five test circuits.
We chose to determine the ranges of PLA variables that perform well, rather than
simply find the best single architecture across the five test circuits. This is because we
did not want to rely too heavily on the test circuits we were using, as they might not be
very representative of the overall set of circuits that we would eventually use. In order to
do this, we took the geometric mean of all of the architectures with IN=4, for all
architectures with IN=8, and so on for each of the three PLA variables. The results of
this are shown in Table 9.
Table 9. Area-Delay results for different PLA parameters in our test circuits
IN
4
8
12
16
20
24
28
Geo. Mean
23.63
3.85
2.58
3.97
4.13
5.62
7.15
PT
.5*IN
1*IN
2*IN
3*IN
4*IN
Geo. Mean
17.91
5.10
3.49
3.69
4.32
OUT
.25*IN
.5*IN
.75*IN
1*IN
Geo. Mean
3.83
4.47
6.40
8.42
As Table 9 displays, the best results were obtained for IN values of 8 to 16, for PT
values of 2*IN to 4*IN, and for OUT values of .25*IN to .75*IN. In order to hone in on
these regions, we next discounted all of the PLA architectures that used variables outside
of these ranges: so we were now only considering PLAs with IN values of 8, 12, or 16,
PT values of 2*IN, 3*IN, or 4*IN, and OUT values of .25*IN, .50*IN, or .75*IN. The
results for these ranges are shown in Table 10.
As shown in Table 10, the best two IN values for our test circuits are 12 and 8, the
best two PT values are 3*IN and 2*IN, and the best two OUT values are .5*IN and
76
.25*IN. This has provided us with a region of PLA sizes that are effective, as well as a
relationship between the IN, PT, and OUT variables that tends to provide quality results.
To generalize, a ratio of 1x to 2x to .5x for the IN, PT, and OUT variables respectively
was found to consistently provide good results. Within the scope of these ratios, CPLDs
with roughly 10-20-5 PLAs were very effective. These results will be leveraged in the
formulation of our architecture generation algorithms.
Table 10. Area-Delay results for different PLA parameters in our test circuits. Data includes only
PLAs with the PLA parameters shown in the table
IN
8
12
16
Geo. Mean
2.30
1.35
2.35
PT
2*IN
3*IN
4*IN
Geo. Mean
1.88
1.78
2.18
OUT
.25*IN
.5*IN
.75*IN
Geo. Mean
1.84
1.74
2.29
Another thing that we observed from these preliminary results is that results tend to
get better as you approach the optimal point, and worse as you move away from it. This
observation led us to the concept of breaking the 3-D space into three 1-D spaces, which
can be searched sequentially and in much less time. Specifically, our algorithms will start
by searching for a good input size (while keeping a 1x-2x-.5x IN-PT-OUT relationship),
next search for a good output size, and finish by searching for a good product-term size.
Displaying the behavior of the 3-D space in a direct fashion would require four
dimensions, so we will do it by displaying the slices of the 3-D space that we see in our
algorithms. For our “large” sample domain, Figure 43 displays the 1-D space explored
by an input step, Figure 44 displays the 1-D space explored by an output step, and Figure
45 displays the 1-D space explored by a product-term step. Notice that all three of the
graphs are relatively concave, and that results do tend to get better as you approach the
optimal point in a 1-D slice of the 3-D space. But these 1-D slices (and therefore the 3-D
space) are far from being perfectly behaved, as there are many small perturbations in the
smoothness that lead to local optima. Using our method of sequential 1-D searches will
provide quality results despite the presence of these local optima, but we need to ensure
that our algorithms are robust enough that they can avoid getting trapped in the
suboptimal regions in these graphs.
77
4.00E-11
3.50E-11
Area * Delay
3.00E-11
2.50E-11
2.00E-11
1.50E-11
1.00E-11
5.00E-12
3
8
13
18
23
28
PLA Inputs (IN - 2*IN - IN/2)
Figure 43. Results of a 1-D search through the PLA space for the “large” sample domain, using a
fixed ratio of 1x-2x-.5x for the IN-PT-OUT values
1.00E-10
9.00E-11
8.00E-11
Area * Delay
7.00E-11
6.00E-11
5.00E-11
4.00E-11
3.00E-11
2.00E-11
1.00E-11
0.00E+00
0
5
10
15
20
25
PLA Outputs
Figure 44. Results of a 1-D search through the PLA space for the “large” sample domain, starting
from the best point in Figure 43 (18-36-9) and varying only the output value
78
1.00E-11
9.50E-12
9.00E-12
Area * Delay
8.50E-12
8.00E-12
7.50E-12
7.00E-12
6.50E-12
6.00E-12
5.50E-12
5.00E-12
18
28
38
48
58
68
78
PLA Product Term s
Figure 45. Results of a 1-D search through the PLA space for the "large" sample domain, starting
from the best point in Figure 44 (18-36-7) and varying only the product term value
Our architectures are evaluated using the metric of area-delay product.
When
reported for a domain, the area-delay product consists of the worst-case area
implementation in the domain (since the reconfigurable CPLD must be large enough to
hold each of the circuits), multiplied by the average case delay of the domain. The area
model for this calculation is derived from the actual sizings of the VLSI layout
components that we created, and the delay model was acquired by creating circuits in
layoutPlus and simulating them with hspice in order to acquire their worst-case delay
characteristics. This is described in more detail in Chapter 5.
7.2.1
Search Algorithms
We developed four different search algorithms with the aim of finding good CPLD
architectures: Hill Descent, Successive Refinement, Choose N Regions, and Run M
Points. All algorithms break the 3-D search space into 1-D steps by searching for good
input, output, and product-term sizes, in that order. Additionally, the input step always
uses PLAs with a 1x-2x-.5x IN-PT-OUT ratio, while the output and product-term steps
79
always alter ONLY the output and product-term values (respectively) from data point to
data point. At a high level, each of the basic search algorithms looks the same: the
pseudocode for the general search algorithm is shown in Figure 46. Note that we will
discuss some algorithm add-ons later in this section that will add some complexity to the
basic description discussed here.
generalSearchAlgorithm()
{
input circuits;
//circuits in the domain
output in, pt, out; //the PLA values for the preferred CPLD arch.
{in, pt, out} = runInputSearchGeneral(circuits);
{in, pt, out} = runOutputSearchGeneral(circuits, in, pt, out);
{in, pt, out} = runPTermSearchGeneral(circuits, in, pt, out);
return {in, pt, out};
}
Figure 46. General pseudocode for the search algorithms
7.2.1.1 Hill Descent
The Hill Descent algorithm is the first algorithm that we developed, and the most
basic. Like all of our algorithms, the 3-dimensional search space is broken into three
sequential 1-dimensional searches. The input search step starts by running PLAmap on
architectures with 10-20-5 and 12-24-6 PLAs. Whichever result is better, we continue to
take results in that direction (i.e. smaller or larger PLAs), keeping the 1x-2x-.5x ratio
intact and performing steps of IN = +/-2. We continue until a local optimum is reached,
as determined by the first result that does not improve upon the last result. At this point
we explore the PLAs with IN = +/-1 of the current local optimum. The best result is
noted, and the input value is permanently locked at this value, thus ending the input step.
This is shown graphically in Figure 47, and the pseudocode for it is shown in Figure 48.
80
Cost
local optimum
+/-1 of optimum
10
12
14
16
18
Input Size
Figure 47. Hill Descent Algorithm
The output optimization step occurs next. The first data point in this step is the local
optimum from the input step, and the second data point is acquired by running PLAmap
on a PLA with one more output than the current optimum (IN and PT do not change).
Again, we descend the hill by altering OUT by +/-1 until the first result that does not
improve upon the previous result. At this point we lock the output value and proceed to
the product-term optimization step.
The product-term optimization step repeats the
process from the previous two steps, varying the PT value by +/-2 until the descent stops.
At this point, the PT values +/-1 of the optimum are taken, and the best overall result seen
is the output of the algorithm.
The output and product-term steps are shown in
pseudocode in Figure 49 and Figure 50 respectively.
The Hill Descent algorithm is decidedly greedy, as it always moves in the direction
of initial improvement.
It also has no method for avoiding local minima, as any
minimum will stop the current step. Therefore it is somewhat difficult for this algorithm
to find architectures that vary much in size from the 10-20-5 PLA starting point, but
decent results are still obtained due to the fact that the 10-20-5 starting point is a
relatively good point in the 3-D search space.
81
runInputSearchHD(circuits)
{
output in, pt, out; //variables for the PLA-size
result1, result2;
gettingBigger;
//objects hold the results of running PLAmap
//whether our PLAs are getting bigger or smaller
result1 = runPLAmap(circuits, 10, 20, 5);
result2 = runPLAmap(circuits, 12, 24, 6);
//Determine whether to search larger or smaller PLA sizes
if(result2 < result1) {
gettingBigger = true;
in = 14; pt = 28; out = 7;
} else {
gettingBigger = false;
in = 8; pt = 16; out = 4;
result2 = result1;
//keep best result in result2
}
//Continue to go until we stop improving
while((result1 = runPLAmap(circuits, in, pt, out)) < result2) {
result2 = result1;
if(gettingBigger) {
in += 2;
} else {
in -= 2;
}
pt = 2*in; out = .5*in;
}
//We stopped improving, so go back to the best data point
if(gettingBigger) {
in -= 2;
} else {
in += 2;
}
//Run the points next to our best point
if(result1=runPLAmap(circuits, in+1, 2*(in+1), .5*(in+1)) < result2)
result2 = result1;
if(result1=runPLAmap(circuits, in-1, 2*(in-1), .5*(in-1)) < result2)
result2 = result1;
//return the PLA variables of the best result
return {result2.in(), result2.pt(), result2.out()};
}
Figure 48. Pseudocode for the input step of the Hill Descent algorithm
82
runOutputSearchHD(circuits, in, pt, out)
{
result1, result2; //objects hold the results of running PLAmap
gettingBigger;
//whether our PLAs are getting bigger or smaller
result1 = runPLAmap(circuits, in, pt, out);
result2 = runPLAmap(circuits, in, pt, (out+1));
//Determine whether to search larger or smaller PLA sizes
if(result2 < result1) {
gettingBigger = true;
out +=2;
} else {
gettingBigger = false;
out -= 1;
result2 = result1;
//keep best result in result2
}
//Continue to go until we stop improving
while((result1 = runPLAmap(circuits, in, pt, out)) < result2) {
result2 = result1;
if(gettingBigger) {
out += 1;
} else {
out -= 1;
}
}
//We stopped improving, so return PLA variables of best result
return {result2.in(), result2.pt(), result2.out()};
}
Figure 49. Pseudocode for the output step of the Hill Descent algorithm
7.2.1.2 Successive Refinement
The successive refinement algorithm is intended to slowly disregard the most
unsuitable PLA architectures, thereby ultimately deciding upon a good architecture by
process of elimination. In the input optimization step (Figure 51), data points are initially
taken for PLAs with input counts ranging from 4 (lower bound) to 28 (upper bound) with
a step size of 8. So initially, 4-8-2, 12-24-6, 20-40-10, and 28-56-14 PLAs are run (part a
in Figure 51). The left and right edges are then examined, and regions that are unlikely to
83
runPTermSearchHD(circuits, in, pt, out)
{
result1, result2;
//objects hold the results of running PLAmap
gettingBigger;
//whether our PLAs are getting bigger or smaller
result1 = runPLAmap(circuits, in, pt, out);
result2 = runPLAmap(circuits, in, pt+2, out);
//Determine whether to search larger or smaller PLA sizes
if(result2 < result1) {
gettingBigger = true;
pt += 4;
} else {
gettingBigger = false;
pt -= 2;
result2 = result1;
//keep best result in result2
}
//Continue to go until we stop improving
while((result1 = runPLAmap(circuits, in, pt, out)) < result2) {
result2 = result1;
if(gettingBigger) {
pt += 2;
} else {
pt -= 2;
}
}
//We stopped improving, so go back to the best data point
if(gettingBigger) {
pt -= 2;
} else {
pt += 2;
}
//Run the points next to our best point
if(result1=runPLAmap(circuits, in, pt+1, out) < result2)
result2 = result1;
if(result1=runPLAmap(circuits, in, pt-1, out) < result2)
result2 = result1;
//return the PLA variables of the best result
return {result2.in(), result2.pt(), result2.out()};
}
Figure 50. Pseudocode for the product-term step of the Hill Descent algorithm
84
provide good results are trimmed (shaded regions in part a). The step size is then halved,
and the above process is repeated (part b). This occurs until we have performed an
exploration with a step size of 1 (part d). The pseudocode for this input step is shown in
Cost
Figure 53.
4
12
20
28
Cost
Input Size
12
16
20
24
28
22
24
Input Size
Cost
Progress
16
18
20
Cost
Input Size
16
18
20
22
24
Input Size
Figure 51. Input optimization step of the Successive Refinement algorithm. At each iteration,
shaded regions are trimmed (not including the point at their edge) and the step size halved
The trimming algorithm deserves some additional consideration before we introduce
the pseudocode. Because our 3-D PLA search space is generally well behaved, we
expect our 1-D searches to come up with graphs that have only one minimum, with data
progressively getting worse as we move away from the minimum. The left half of the
graph in Figure 52 displays points that are well behaved. For well behaved 1-D sections,
the trimming algorithm simply trims away points until it reaches three points that form a
85
valley, representing a minimum. These three points are not trimmed. This is shown in
the Figure 52.
Because our space isn’t always well behaved, however, we expect some regions of
the 1-D space to have local minima. We always try to keep minima away from the edges
of our current intervals by trimming only up to any three points that create a valley,
ensuring that the edge is not a local minimum. Thus, if a local minimum appears at the
very edge of our current interval of consideration, it is because a new data point has been
explored causes the edge point to be a minimum. An example of this is shown on the
right edge of Figure 52, where the second point from the right has just been explored. In
these instances, the local optimum at the interval edge gets trimmed, as shown. The only
exception to this is if the point at the interval edge is the current global minimum, in
which case we do not trim it. The pseudocode for the trimming algorithm is shown in
Figure 54, including how to deal with special cases such as ties.
trim
Cost
trim
small
large
PLA Variable
Figure 52. Trimming occurs from the edges until reaching three points that make a valley. Local
optima that appear at interval edges are trimmed unless they are the current global minimum
For the output optimization step, the IN and PT values are locked at the best result
we found in the input step. The output values are now varied according to the above
refinement algorithm, using an initial lower bound of 1, upper bound of 25, and step size
of 8. The recursion again continues until the results for a step size of 1 have been taken,
at which point we lock the IN and OUT values. The product-term optimization step next
repeats this process for PT values between 2 and 90, after which the best result is
86
returned as the best architecture found. The pseudocode for the output and producttermssteps is shown in Figure 55 and Figure 56 respectively.
runInputSearchSR(circuits)
{
output in, pt, out; //variables for the PLA-size
leftEdge = 4;
//variables holding the in value of the left
rightEdge = 28;
stepSize = 8;
//and right edges of our search window
//current stepSize for taking data
results[];
bestResult;
//holds my result objects
//holds the best result at the end
//While we haven’t completed taking data at a step size of 1
while(stepSize > 0) {
//For the interval and step size, add the results we don’t have
for(i=leftEdge; i<=rightEdge; i+= stepSize) {
results = {results, runPLAmap(circuits, i, 2*i, .5*i)};
}
//Trim regions of poor results from the left and right edges
leftEdge = trimFromLeftIN(leftEdge, rightEdge, stepSize, results);
rightEdge = trimFromRightIN(leftEdge, rightEdge, stepSize, results);
//halve the step size
stepSize = floor(stepSize/2);
}
//get the best result within the interval
bestResult = getBestResultInInterval(leftEdge, rightEdge, results);
//return the PLA variables of the best result
return {bestResult.in(), bestResult.pt(), bestResult.out()};
}
Figure 53. Pseudocode for the input step of the Successive Refinement algorithm
87
trimFromLeftIN(leftEdge, rightEdge, stepSize, results)
{
newLeftEdge = leftEdge; //the new left edge we return
bestResult = results.getBestResult(); //the best result we’ve seen
//sort the results such that the smallest PLA is result[0]
//we are assuming here that result[0] is the point at leftEdge
results.sortBySize();
i = 0; //used for walking through results
//continue trimming until a point resists trimming, then break
while(1) {
//if the left point is better than the second point (rare case),
//we trim it unless it is our best current point
if(result[i] < result[i+1]) {
if(result[i] == bestResult) {
break;
} else {
newLeftEdge = result[i+1].in();
}
}
//if the left point is worse than the second point (typical case),
//trim it unless the three points create a valley
else {
if(result[i+1] < result[i+2]) {
break;
} else {
newLeftEdge = result[i+1].in();
}
}
i++;
//increment i to consider next point for trimming
}
return newLeftEdge;
//return the new left edge
}
Figure 54. Pseudocode for trimming the left edges of an interval in the input step of the Successive
Refinement algorithm. The "trim from right" case is symmetrical to this. For the output and
product-term steps, simply replace all “.in()” with “.out()” or “.pt()” respectively
88
runOutputSearchSR(circuits, in, pt, out)
{
leftEdge = 1;
//variables holding the in value of the left
rightEdge = 25;
stepSize = 8;
//and right edges of our search window
//current stepSize for taking data
results[];
bestResult;
//holds my result objects
//holds the best result at the end
//While we haven’t completed taking data at a step size of 1
while(stepSize > 0) {
//For the interval and step size, add the results we don’t have
for(i=leftEdge; i<=rightEdge; i+= stepSize) {
results = {results, runPLAmap(circuits, in, pt, i)};
}
//Trim regions of poor results from the left and right edges
leftEdge = trimFromLeftOUT(leftEdge, rightEdge, stepSize, results);
rightEdge = trimFromRightOUT(leftEdge,rightEdge, stepSize, results);
//halve the step size
stepSize = floor(stepSize/2);
}
//get the best result within the interval
bestResult = getBestResultInInterval(leftEdge, rightEdge, results);
//return the PLA variables of the best result
return {bestResult.in(), bestResult.pt(), bestResult.out()};
}
Figure 55. Pseudocode for the output step of the Successive Refinement algorithm
The Successive Refinement algorithm is greedy in the way it trims sub-optimal
PLAs from the edges of its consideration. It does not trim sub-optimal regions from the
middle, however, and can therefore require more PLAmap runs than is necessary.
Typically, several local minima get explored at maximum granularity, providing a good
survey of the areas around the minima at a small cost to runtime.
7.2.1.3 Choose N Regions
The Choose N Regions algorithm basically makes a wide sweep of each 1-D space,
and then uses the results to iteratively choose N regions to explore at a finer granularity.
A region consists of the space between two data points.
89
runPTermSearchSR(circuits, in, pt, out)
{
leftEdge = 10;
//variables holding the in value of the left
rightEdge = 90;
stepSize = 8;
//and right edges of our search window
//current stepSize for taking data
results[];
bestResult;
//holds my result objects
//holds the best result at the end
//While we haven’t completed taking data at a step size of 1
while(stepSize > 0) {
//For the interval and step size, add the results we don’t have
for(i=leftEdge; i<=rightEdge; i+= stepSize) {
results = {results, runPLAmap(circuits, in, i, out)};
}
//Trim regions of poor results from the left and right edges
leftEdge = trimFromLeftPT(leftEdge, rightEdge, stepSize, results);
rightEdge = trimFromRightPT(leftEdge, rightEdge, stepSize, results);
//halve the step size
stepSize = floor(stepSize/2);
}
//get the best result within the interval
bestResult = getBestResultInInterval(leftEdge, rightEdge, results);
//return the PLA variables of the best result
return {bestResult.in(), bestResult.pt(), bestResult.out()};
}
Figure 56. Pseudocode for the product-term step of the Successive Refinement algorithm
Like the Successive Refinement algorithm, the input optimization step of the Choose
N Regions algorithm is initiated by taking data points for PLAs with inputs ranging from
4 to 28, but now with a step size of 4. This initially separates the 1-D space into 6
regions, where a region consists of a data point on the left side, a data point on the right
side, and the unexplored space between them (see Figure 57). The N best regions are
then chosen for further exploration (N=2 was experimentally found to be a good value).
The best regions is the region with the best primary result: min(leftResult, rightResult).
For ties, the region with the best secondary result is taken, as shown in the figure. For the
N regions we retain, we halve the step size and acquire data in the center of the chosen
90
regions: this gives us 2N regions (of half the width as before), from which we will again
choose the best N regions. The whole process is iterated until N regions have been
explored with a step size of 1. The pseudocode for this input step is shown in Figure 58.
A
C
Cost
B
4
8
12
16
20
24
28
Input Size
Figure 57. Choose N Regions Algorithm. Region B is the best because it has the best primary point
(along with region A) and the best secondary point. Region A is 2nd best, region C is 3rd best
For the output optimization step, we lock the input and product-term values from the
best result found in the input step. The output value ranges from 1 to 25, with a step size
of 4, and the Choose N process is repeated. For the product-term optimization step, the
input and output values from the best result are locked, and the PT values are ranged
from 10 to 90 with a step size of 8. After the product-term step has completed its step
size of 1, the best overall result is returned. The pseudocode for the output and productterm steps is in Figure 59 and Figure 60 respectively.
The Choose N Regions algorithm has the advantage of retaining, at all steps, N
regions of consideration. This allows the algorithm to hone into multiple local minima,
as well as throw out old minima that get replaced by new, better results.
91
runInputSearchCN(circuits, N)
{
results[];
//holds my result objects
tempResult;
region[];
//holds a temporary result object
//holds the region objects
newRegion[];
//holds the newly made region objects
//Acquire the initial data points
for(i=4; i<=28; i+=4) {
results = {results, runPLAmap(circuits, i, 2*i, .5*i)};
}
//Build up our list of initial regions
for(i=0; i<6; i++) {
region[i] = makeRegion(result[i], result[i+1]);
}
//Iteratively find the best N regions, until we hit granularity
while(1) {
//Get the best N regions
newRegion[] = getBestRegions(region, N);
if(newRegion[0].getSpan() == 1) {
break;
//break when we’ve hit granularity
}
region.empty(); //empty the old list of regions
//Build the new 2N regions from the N best regions
for(i=0; i<N; i++) {
tempResult = runPLAmap(circuits, newRegion[i].middle());
region[2*i] = makeRegion(newRegion[i].leftResult(), tempResult);
region[2*i+1] =makeRegion(tempResult, newRegion[i].rightResult());
}
}
//Get the best result, and return the PLA variables
tempResult = getBestResult(newRegion);
return {tempResult.in(), tempResult.pt(), tempResult.out()};
}
Figure 58. Pseudocode for the input step of the Choose N Regions algorithm
92
runOutputSearchCN(circuits, in, pt, out, N)
{
results[];
//holds my result objects
tempResult;
region[];
//holds a temporary result object
//holds the region objects
newRegion[];
//holds the newly made region objects
//Acquire the initial data points
for(i=1; i<=25; i+=4) {
results = {results, runPLAmap(circuits, in, pt, i)};
}
//Build up our list of initial regions
for(i=0; i<6; i++) {
region[i] = makeRegion(result[i], result[i+1]);
}
//Iteratively find the best N regions, until we hit granularity
while(1) {
//Get the best N regions
newRegion[] = getBestRegions(region, N);
if(newRegion[0].getSpan() == 1) {
break;
//break when we’ve hit granularity
}
region.empty(); //empty the old list of regions
//Build the new 2N regions from the N best regions
for(i=0; i<N; i++) {
tempResult = runPLAmap(circuits, newRegion[i].middle());
region[2*i] = makeRegion(newRegion[i].leftResult(), tempResult);
region[2*i+1] =makeRegion(tempResult, newRegion[i].rightResult());
}
}
//Get the best result, and return the PLA variables
tempResult = getBestResult(newRegion);
return {tempResult.in(), tempResult.pt(), tempResult.out()};
}
Figure 59. Pseudocode for the output step of the Choose N Regions algorithm
93
runPTermSearchCN(circuits, in, pt, out, N)
{
results[];
//holds my result objects
tempResult;
region[];
//holds a temporary result object
//holds the region objects
newRegion[];
//holds the newly made region objects
//Acquire the initial data points
for(i=10; i<=90; i+=8) {
results = {results, runPLAmap(circuits, in, i, out)};
}
//Build up our list of initial regions
for(i=0; i<10; i++) {
region[i] = makeRegion(result[i], result[i+1]);
}
//Iteratively find the best N regions, until we hit granularity
while(1) {
//Get the best N regions
newRegion[] = getBestRegions(region, N);
if(newRegion[0].getSpan() == 1) {
break;
//break when we’ve hit granularity
}
region.empty(); //empty the old list of regions
//Build the new 2N regions from the N best regions
for(i=0; i<N; i++) {
tempResult = runPLAmap(circuits, newRegion[i].middle());
region[2*i] = makeRegion(newRegion[i].leftResult(), tempResult);
region[2*i+1] =makeRegion(tempResult, newRegion[i].rightResult());
}
}
//Get the best result, and return the PLA variables
tempResult = getBestResult(newRegion);
return {tempResult.in(), tempResult.pt(), tempResult.out()};
}
Figure 60. Pseudocode for the product-term step of the Choose N Regions algorithm
94
7.2.1.4 Run M Points
The Run M Points algorithm initiates each step by making a wide sweep of the 1-D
space, and then iteratively explores points near the best current point. For each 1-D
space, the algorithm collects data for M total points before progressing to the next step.
Experimentally, a value of M=15 was found to provide good results.
Again, the input optimization step starts by taking data points for PLAs with inputs
ranging from 4 to 28, with a step size of 4. Next, the best data point is found, and results
are taken on either side of it with the largest step size that results in unexplored data
points (options are 4, 2, and 1). This is shown in Figure 61. The process is repeated on
the best current data point, which is constantly updated, until M data points have been
explored for the input step. Once the direct neighbors of a point have been computed, it
is eliminated from further explorations; this allows other promising candidates to be
explored as well. The pseudocode for the input step is shown in Figure 62.
Cost
best point
new exploration
4
8
12
16
20
24
28
Input Size
Figure 61. Run M Points Algorithm. The best point is always chosen, and the regions to its left and
right are explored
For the output step, we lock the input and product-term values of the best result
found in the input step. We then range the output values from 1 to 25, with a step size of
4, and repeat the Run M Points algorithm mentioned above. The product-term step
repeats this process, with product-term values ranging from 10 to 90 and a step size of 8
(so possible step sizes are 8, 4, 2, and 1 now). These steps are shown in Figure 63 and
Figure 64.
95
runInputSearchRM(circuits, M)
{
results[];
//holds my result objects
tempResult;
pointsTaken = 0;
//holds a temporary result
//how many points we’ve taken so far
//Acquire the initial data points
for(i=4; i<=28; i+=4) {
results = {results, runPLAmap(circuits, i, 2*i, .5*i)};
pointsTaken++;
}
//Iteratively get the best available point, and run the points
//next to it. We will only grab results whose search
//neighborhood has not been exhausted.
while(pointsTaken <= M) {
tempResult = getBestResultNotExhausted(results);
if(tempResult.canRunToLeft()) {
results = {results, runPLAmap(circuits, tempResult.runToLeft())};
pointsTaken++;
}
if(tempResult.canRunToRight()) {
results = {results, runPLAmap(circuits, tempResult.runToRight())};
pointsTaken++;
}
}
//Get the best result, and return the PLA variables
tempResult = getBestResult(results);
return {tempResult.in(), tempResult.pt(), tempResult.out()};
}
Figure 62. Pseudocode for the input step of the Run M Points algorithm
Because we are exploring to either side of the best result, the range of 10 to 90 is not
strictly enforced for the product-term step, as exploration around 10 or 90 would take
data points on both sides of the given point. This concept is true for all steps in the Run
M Points algorithm. Also note that the input and output steps have the same interval size
and step size, while the product-term step has a larger interval and larger step size. The
initial sweep of the input and output spaces requires 7 data points, while the initial sweep
96
of the product-term space requires 11 data points. The product-term sweep is also
performed with a step size of 8, whereas the input and output steps use a step size of 4.
runOutputSearchRM(circuits, in, pt, out, M)
{
results[];
//holds my result objects
tempResult;
pointsTaken = 0;
//holds a temporary result
//how many points we’ve taken so far
//Acquire the initial data points
for(i=1; i<=25; i+=4) {
results = {results, runPLAmap(circuits, in, pt, i)};
pointsTaken++;
}
//Iteratively get the best available point, and run the points
//next to it. We will only grab results whose search
//neighborhood has not been exhausted.
while(pointsTaken <= M) {
tempResult = getBestResultNotExhausted(results);
if(tempResult.canRunToLeft()) {
results = {results, runPLAmap(circuits, tempResult.runToLeft())};
pointsTaken++;
}
if(tempResult.canRunToRight()) {
results = {results, runPLAmap(circuits, tempResult.runToRight())};
pointsTaken++;
}
}
//Get the best result, and return the PLA variables
tempResult = getBestResult(results);
return {tempResult.in(), tempResult.pt(), tempResult.out()};
}
Figure 63. Pseudocode for the output step of the Run M Points algorithm
In order to account for the differences in 1-D search space, the product-term step is
allowed to explore (M+6) total data points. Of the six additional allowed data points,
four of them are to account for the larger initial sweep, and the other two are used to
97
allow the algorithm to search roughly the same number of regions to the same depth as
the input and output steps.
runPTermSearchRM(circuits, in, pt, out, M)
{
results[];
//holds my result objects
tempResult;
pointsTaken = 0;
//holds a temporary result
//how many points we’ve taken so far
//Acquire the initial data points
for(i=10; i<=90; i+=8) {
results = {results, runPLAmap(circuits, in, i, out)};
pointsTaken++;
}
//Iteratively get the best available point, and run the points
//next to it. We will only grab results whose search
//neighborhood has not been exhausted.
//Allow it to run 6 more points than the input and output steps
//since it is searching a larger 1-D space
while(pointsTaken <= (M + 6)) {
tempResult = getBestResultNotExhausted(results);
if(tempResult.canRunToLeft()) {
results = {results, runPLAmap(circuits, tempResult.runToLeft())};
pointsTaken++;
}
if(tempResult.canRunToRight()) {
results = {results, runPLAmap(circuits, tempResult.runToRight())};
pointsTaken++;
}
}
//Get the best result, and return the PLA variables
tempResult = getBestResult(results);
return {tempResult.in(), tempResult.pt(), tempResult.out()};
}
Figure 64. Pseudocode for the product-term step of the Run M Points algorithm
While the Choose N Regions algorithm explores N possible optima in parallel, the
Run M Points algorithm can be seen as exploring the optima one at a time. It will
explore the best optimum until it runs out of granularity, then will turn to the second best
98
optimum, and so on.
In this way it also considers multiple possible optima, as
determined by the value chosen for M.
7.2.2
Algorithm Add-Ons
The four algorithms mentioned above comprise the bulk of the Architecture
Generator, but some additional routines have been deemed necessary in order to obtain
either better or more robust results.
7.2.2.1 Radial Search
As mentioned before, the 3-D search space for this problem is relatively well shaped,
but not perfectly so.
There are many local optima that might prevent the above
algorithms from finding the global optimum. One way to look outside of these local
optima is to search the 3-D space within some radius of the current optimum. So for a
radius R search around an X-Y-Z architecture, we would vary IN from X-R to X+R, PT
from Y-R to Y+R, and OUT from Z-R to Z+R, testing all architectures in this 3-D
subspace. Figure 65 shows the pseudocode for this.
We have a strict time constraint on the runtime of the Architecture Generator, so
performing the (2R+1)^3 extra PLAmap runs necessary for a radius = R search is not
feasible as part of our finalized tool flow. Given looser time constraints and moderately
sized circuits, however, small radial searches are not out of the question. Another reason
to run radial searches is that it can search a small (but good) part of the 3-D search space
exhaustively, and provide an idea of how well the basic algorithms are performing. For
this reason, we have performed radial searches of R = 3 at the conclusions of the basic
algorithms listed above.
99
runRadius(circuit, in, pt, out, R)
{
result[];
//the result objects we obtain
tempResult;
//for returning the best result
//Run the radial search
for(i=(in-R); i<=(in+R); i++) {
for(j=(pt-R); j<=(pt+R); j++) {
for(k=(out-R); k<=(out+R); k++) {
result = {result, runPLAmap(circuits, i, j, k)};
}
}
}
//get the best result and return it
tempResult = getBestResult(result);
return {tempResult.in(), tempResult.pt(), tempResult.out()};
}
Figure 65. Pseudocode for the radial search add-on
7.2.2.2 Algorithm Iteration
The Architecture Generator algorithms all assume that the PLAs should be in a 1x2x-.5x relationship in terms of inputs, product terms, and outputs. This is just a rough
guideline, however, and is very rarely the optimal ratio for a given domain. Thus, an
interesting idea is to run the basic algorithms and then look at the resulting PLA to obtain
a new IN-PT-OUT relationship. A second iteration of the algorithm can be run with this
new IN-PT-OUT relationship, exploring the 3-D search space using a relationship that
the domain has already been shown to prefer. For example, if the first iteration chose a
10-30-8 architecture, then the IN-PT-OUT relationship for the next iteration would be 1x3x-.8x. A second iteration has been carried out for all of the algorithms on each domain.
Figure 66 shows the general top level pseudocode when a second iteration is used.
100
generalSearchAlgorithmWithIteration()
{
input circuits;
//circuits in the domain
output in, pt, out; //the PLA values for the preferred CPLD arch.
ptRatio = 2;
outRatio = .5;
//The initial in-pt-out ratio is 1x-2x-.5x
for(i=0; i<2; i++) {
{in, pt, out} = runInputSearchGeneral(circuits, ptRatio, outRatio);
{in, pt, out} = runOutputSearchGeneral(circuits, in, pt, out);
{in, pt, out} = runPTermSearchGeneral(circuits, in, pt, out);
ptRatio = (pt/in);
outRatio = (out/in);
//get the new ratios for iteration #2
}
return {in, pt, out};
}
Figure 66. Pseudocode for the top level when using a second algorithm iteration
7.2.2.3 Small PLA Inflexibility
The initial step of each algorithm locks the input value at a value that it deems to be
appropriate by testing a wide range of PLA sizes. During the course of algorithms
development, we found that domains that migrate to small input values during the input
step (i.e. a 4-8-2 PLA) are left with very little flexibility for the corresponding output and
product-term steps. The PLAs become strictly input limited, and very few ranges of
outputs or product terms will result in reasonable results. When this occurs, the final
result of the algorithm tends to be very poor.
To alleviate this, we have added a modification to all of the algorithms. Now, if the
input step chooses a PLA with 6 or fewer inputs, the output step will be run both with the
PLA found in the input step (6-12-3 or smaller) and with a 10-20-5 PLA. Both of these
branches are propagated to the product-term step, and the best overall result of the two
branches is taken. We found that this process alleviated the problem of being trapped in
small PLA sizes, and it provided better results in all applicable cases. Figure 67 shows
the general top level pseudocode that includes this add-on.
101
generalSearchAlgorithmWithSmallPLAInflexibility()
{
input circuits;
in, pt, out;
in2, pt2, out2;
//circuits in the domain
//the PLA values for the preferred CPLD arch.
//temp PLA vars for the alternate path
{in, pt, out} = runInputSearchGeneral(circuits);
//run the parallel path if necessary
if(in <= 6) {
{in2, pt2, out2} = runOutputSearchGeneral(circuits, 10, 20, 5);
{in2, pt2, out2} = runPTermSearchGeneral(circuits,in2, pt2, out2);
}
{in, pt, out} = runOutputSearchGeneral(circuits, in, pt, out);
{in, pt, out} = runPTermSearchGeneral(circuits, in, pt, out);
if(getResult(in, pt, out) < getResult(in2, pt2, out2)) {
return {in, pt, out};
} else {
return {in2, pt2, out2};
}
}
Figure 67. Pseudocode for the top level when using the small PLA inflexibility add-on
7.3 Layout Generator
The Layout Generator is responsible for taking the CPLD architecture description
from the Architecture Generator and turning it into a full VLSI layout. It does this by
intelligently tiling pre-made, highly optimized layout cells into a full CPLD layout. The
Layout Generator runs in Cadence’s layoutPlus environment, and uses a SKILL routine
that was written by Shawn Phillips [19]. The layouts are designed in the TSMC .18µ
process.
Figure 68 displays a small CPLD that was created using the Layout Generator, along
with a floorplan that describes the different sections of the layout. For clarity’s sake, the
encoding logic required for programming the RAM bits is not shown, but would appear
along the left and bottom of the laid out CPLD. Pre-made cells exist for every part of the
CPLD: the Layout Generator simply puts together the pre-made pieces as specified by the
102
architecture description that the Architecture Generator provides.
The PLAs are
implemented in pseudo-nMOS in order to provide a compact layout.
Reg
Driver
Xbar2Drive Wire
AND-Plane
Reg
Driver
Xbar2Drive Wire
AND-Plane
Reg
Driver
Xbar2Drive Wire
Crossbar
ORPlane
Reg
Reg2Xbar Wire
Crossbar
ORPlane
Reg2Xbar Wire
Reg2Xbar Wire
Reg2Xbar Wire
Crossbar
ORPlane
Buf
AND-Plane
Buf
Driver
Xbar2Drive Wire
ORPlane
Buf
Buf
AND-Plane
Crossbar
Xbar2Drive Wire
Driver
Reg
Xbar2Drive Wire
Driver
Reg
AND-Plane
ORPlane
AND-Plane
ORPlane
AND-Plane
ORPlane
AND-Plane
ORPlane
Buf
Reg
Buf
Xbar2Drive Wire
Driver
Buf
Reg
Buf
Xbar2Drive Wire
Driver
Figure 68. The floorplan of the generated CPLD (top) [25] and the resulting layout (bottom)
103
7.4 Methodology
We will be creating CPLD architectures that are tailored to specific application
domains, but how will we know whether our architectures are actually better than more
general architectures? In order to examine this question, we will compare our domainspecific architecture results to some general fixed architectures that we believe to be
efficient. All results will be calculated using the same delay and area models that we use
for our domain-specific architectures.
We will compare our domain-specific architectures to three different fixed
architectures, all of which will use a full crossbar to connect the PLA units in order to
conform to our area and delay models.
A 1991 analysis of PLA sizing in
reprogrammable architectures by Kouloheris and El Gamal [52] showed that PLAs with
8-10 inputs, 12-13 product terms, and 3-4 outputs provide the best area performance for
island-style CPLD architectures.
While we are not creating island-style CPLD
architectures, we would still like to compare our results to the PLA-size proposed in this
paper, as it will allow us to model a CPLD architecture that uses relatively small
functional units. Therefore, to model this work, the first architecture we will compare to
uses 10-12-4 PLAs.
Secondly, our own initial analysis of running several LGSynth93 circuits through
PLAmap showed that CPLDs with roughly 10-20-5 PLAs displayed good performance.
We will us this as our second fixed architecture.
Third, we will compare against a XILINX CoolRunner-like architecture.
The
CoolRunner utilizes 36-48-16 PLAs for its functional units [26]: the choice of a large
PLA allows them to provide shallow mappings with predictable and fast timing
characteristics.
We will therefore compare our domain-specific results to a fixed
architecture that uses these PLAs.
Note that we are NOT making a direct comparison to XILINX’s CPLDs or any other
existing CPLD architecture.
By implementing everything using our own physical
layouts, we intend to remove the layout designer from the cost equation and simply show
104
the advantages obtained by using domain-specific architectures rather than implementing
designs on fixed architectures.
7.4.1
Failed PLAmap Runs
Our tool flow utilizes an executable of the PLAmap algorithm as part of the
architecture generation process.
For unknown reasons, PLAmap fails to provide
mappings for some circuits on specific architectures. The failures seem to appear at
random PLA sizes, although they are sometimes grouped such that a small 3-D region
might contain several data points that are unobtainable. The executable we use provides
deterministic results, so we have no method of acquiring data for these cases.
Because our algorithms can run for hours or days, we have designed them to raise a
visual flag when a failed PLAmap run occurs, but to continue running. In this way, the
algorithm continues to accumulate useful data (all PLAmap results are stored on disc to
expedite future runs) until we notice that a failed run has occurred, at which point we can
manually intervene by stopping the algorithm.
In the case of a failed PLAmap run, we first note the circuit and CPLD architecture
of the failure. We then look at the existing PLAmap results for that circuit, and find the
result for the architecture that is closest to the size of the failed architecture, requiring that
it is no larger than the failed architecture in any PLA variable. The results of this
architecture are then substituted for the failed architecture, which allows the algorithm to
be restarted. If multiple existing results look like promising candidates, we look at their
PLA counts and depths and choose the best result in terms of PLAs*depth (to emulate
area*delay).
As an example, say that PLAmap failed to provide a result for circuit FOO on an
architecture that uses 23-45-8 PLAs. When we notice it, we stop the algorithm. We then
look at the existing results for circuit FOO, and find results for 10-20-5, 15-35-20, 20-407, and 25-45-8 architectures. The closest matching result that is not larger than the failed
architecture is the 20-40-7 result, so we substitute this result for the failed 23-45-8 result.
We then restart the algorithm. In the very rare cases where we feel that there is no
105
reasonable existing result to substitute for the failed result, we run PLAmap offline in
order to obtain such a result.
While we haven’t collected data on it, we would estimate that PLAmap fails less
than 1% of the time. While this might seem insignificant, consider that a domain with 20
circuits that tests 50 architectures will result in 10 failed PLAmap runs if it fails only 1%
of the time. In hindsight, it would have been desirable to implement an automatic failure
recovery strategy for failed PLAmap runs, as the manual substitution of missing data
required significant time.
The process could have been automated by searching for all points within some
reasonable radius of the missing data point. The missing data could then be replaced by
the best existing data in this radius. Failure to find a reasonable replacement result would
cause the algorithm to start running PLAmap on architectures near the missing point, and
it would continue until a replacement result is successfully acquired.
7.5 Results
Of the four Architecture Generator algorithms, two of them, the Choose N Regions
and Run M Points algorithms, have a user-supplied variable. In the Choose N Regions
algorithm we must choose how many regions get explored each iteration, while in the
Run M Points algorithm we need to determine how many overall PLAmap runs get
executed in each of the three steps.
For the choose N Regions algorithm, the input step and output step both break the 1D search space into 6 regions, meaning that N can be no larger than 6. We decided to
vary N from 1 to 4 when evaluating the algorithm, as this would result in a reasonable
number of PLAmap runs. Results for running the Choose N Regions algorithm on the
small, medium, and large LGSynth93 domains are shown in Figure 69. The figure shows
that gains are achieved by increasing N from 1 to 2, but that further gains are not
achieved when setting N to 3 or 4. From this, we determined that N = 2 is a good value
to use.
106
1.2
SMALL
MEDIUM
LARGE
Normalized Area * Delay
1.0
0.8
0.6
0.4
0.2
0.0
11
22
33
44
5
16
27
38
9
4
10
11
1
12
2
13
3
14
4
N
Figure 69. Determination of N in Choose N Regions algorithm
For the Run M Points algorithm, we must determine how many total PLAmap runs
are performed for each step of the algorithm. Setting M to 25 would exhaustively search
the 1-D input and output spaces, while setting M to 7 would only search the top level
without making any interesting descents. We decided that setting M to 10, 15, and 20
would provide a good span of results in a reasonable number of PLAmap runs. The
results of running this test on the LGSynth93 domains are shown in Figure 70. The graph
shows that M = 15 always outperformed M = 10, and the going up to M = 20 only
provided further gains in the small domain, and those gains were very small. From these
results, we chose to use M = 15 in all future runs of the Run M Points algorithm.
Now that we have chosen the user-defined variables in the Choose N Regions and
Run M Points algorithms, all of the algorithms are fully specified. Next, we took our five
main domains and ran each of the four algorithms on each domain. These results are
shown in Table 11. All results are normalized to the values obtained for the Choose N
Regions algorithm. The columns labeled “Runs” depict how many architectures each
algorithm tested for each domain. The bottom row shows the geometric mean for
area*delay, and the average for runs.
107
1.2
SMALL
MEDIUM
LARGE
Normalized Area * Delay
1.0
0.8
0.6
0.4
0.2
0.0
1
10
2
15
3
20
4
5
10
6
15
7
20
8
9
10
10
15
11
20
M
Figure 70. Determination of M in Run M Points algorithm
As Table 11 shows, the Successive Refinement achieved the best results for each
of the five domains. The Choose N Regions, and Run M Points algorithms also found the
best architecture in most cases, but the simple Hill Descent algorithm only found it for
one of the five domains. With respect to runtime, the Hill Descent algorithm took 3.5x to
5.1x fewer runs than the other algorithms, while the Successive Refinement algorithm
required the most runs.
Table 11. Architecture results for domain-specific algorithms in terms of area*delay. Results are
normalized to the Choose N Regions algorithm, and geometric mean is used for area-delay results
Domain
Hill Descent
Arch
A*D Runs
Combinational 12-25-4 2.16
13
Sequential
14-27-5 1.18
14
Floating Point
9-26-4 4.50
15
Arithmetic
10-22-2 1.00
14
Encryption
10-20-2 1.47
13
Geo. Mean
1.76 13.8
Algorithms
Succ. Refinement Choose N Regions
Arch
A*D Runs Arch
A*D Runs
12-71-4 1.00
90 12-71-4 1.00
40
14-38-5 1.00
78 14-38-5 1.00
39
10-24-2 1.00
82 10-24-2 1.00
67
10-22-2 1.00
76 10-22-2 1.00
67
16-67-4 1.00
38 10-25-2 1.47
39
1.00 69.8
1.08 48.7
Run M Points
Arch
A*D Runs
12-70-4 1.01
52
14-38-5 1.00
50
10-24-2 1.00
85
10-22-2 1.00
85
10-25-2 1.47
51
1.08 62.6
The Successive Refinement, Choose N Regions, and Run M Points algorithms all
chose 4-8-2 PLAs for the floating-point and arithmetic domains in the first step, causing
them to be stuck in small PLA architectures. The “Small PLA Inflexibility” algorithm
108
add-on was applied to these instances to remove them from their sub optimal areas. This
caused a slight increase in the number of runs that were needed for these algorithms, most
notably in the Choose N Regions and Run M Points results.
Each base algorithm was also run with the second iteration and radial search addons described above. Table 12 displays the best architectures found by the base
algorithms compared to the best results found using these add-ons. If multiple algorithms
found the same result, the algorithm that used the fewest runs is reported.
Table 12. The best base algorithm results compared to best results after a second iteration, and the
best results after a radius=3 radial search. Results are normalized area*delay
Domain
Combinational
Sequential
Floating Point
Arithmetic
Encryption
G Mean / Avg
Best Base Algorithm
Alg
Arch
A*D Runs
CN 12-71-4 1.00
40
CN 14-38-5 1.00
39
CN 10-24-2 1.00
67
HD 10-22-2 1.00
14
SR 16-67-4 1.00
38
1.00 39.6
Best with 2nd Iteration
Alg
Arch
A*D Runs
CN 12-71-4 1.00
60
CN 14-38-4 0.99
77
CN 8-18-2 0.89 105
CN 10-22-2 1.00
87
SR 15-68-4 0.92
75
0.96 80.8
Best with Rad.=3 Search
Alg
Arch
A*D Runs
CN 9-72-4 0.85 377
CN 14-37-6 0.96 377
CN 8-21-2 0.90 307
HD 7-20-2 0.82 250
SR 15-68-4 0.92 375
0.89 337.2
As Table 12 shows, running a second iteration of the algorithms was able to
improve the area-delay product by up to .11x, with a mean area*delay gain of .04x and a
mean runtime penalty of 2.0x with respect to the base algorithms. The R=3 radial search
add-on was able to reduce the area-delay product by up to .18x, with a .11x mean
improvement. The runtime cost for the radius=3 add-on is about 8.5x when compared to
the base algorithms. Table 12 shows that running a second iteration can sometimes be as
effective as running a radial search, and it requires much less time. Also note that our
base algorithms are performing reasonably well, as in all cases they are within .18x of the
best results we can easily find.
The radial search add-on found the best architecture for 4 of the 5 domains, but at a
significant penalty to runtime. On average, it reduced the area-delay product of the base
algorithms by only 11%, but required 8.5x the number of runs. We feel that these
performance gains are generally not worth the runtime penalty, and that the radial search
add-on should only be used offline as a method of evaluating the results obtained by our
faster algorithms.
109
Running a second iteration was able to improve our performance by 4% at a 2.0x
cost to the number of runs required. Note that Table 12 shows that the Hill Descent
algorithm was the best base algorithm for the arithmetic domain: if one of the more
robust algorithms is reported for this data point, then the cost of running a second
iteration is at most 1.6x when compared to the base algorithms. This is a reasonable
consideration, as the results in Table 11 display that we would not want to use the Hill
Descent algorithm as our base algorithm.
These results show that running a second iteration can provide gains without a
drastic penalty to runtime. Closer examination is required, however, to determine which
of the algorithms performs best with a second iteration. Table 13 displays the results
obtained by running the different search algorithms with a second iteration.
Table 13 shows that, when run with a second iteration, the Successive Refinement
algorithm provides slightly better results than the Choose N Regions and Run M Points
algorithms. The simpler Hill Descent algorithm is again shown to provide poor results
compared to the other algorithms, although it does find them quickly. If only looking at
Table 12 and Table 13, we would probably choose the Successive Refinement algorithm
with a second iteration as our chosen algorithm. We happen to have data from earlier
experimentation, however, which provides slightly different insights.
Table 13. The search algorithms run with a second iteration. Results are normalized area*delay
Domain
Hill Descent
Arch
A*D Runs
Combinational 12-29-4 1.74
24
Sequential
14-27-5 1.19
21
Floating Point
9-28-5 3.86
25
Arithmetic
10-22-2 1.00
20
Encryption
8-17-2 1.16
25
Geo. Mean
1.56 22.9
Algorithms Run With Second Iteration
Succ. Refinement Choose N Regions
Arch
A*D Runs Arch
A*D Runs
12-71-4 1.00 108 12-71-4 1.00
60
14-38-4 1.00 151 14-38-4 1.00
77
8-18-2 1.00 116 8-18-2 1.00 105
10-22-2 1.00
92 10-22-2 1.00
87
15-68-4 1.00
75 8-32-2 1.15
78
1.00 105.5
1.03 80.1
Run M Points
Arch
A*D Runs
12-70-4 1.01
80
14-38-4 1.00
99
8-18-2 1.00 135
10-22-2 1.00 114
8-32-2 1.15 101
1.03 104.2
Prior to the finalization of our area and delay models, similar data to that in Table 11,
Table 12, and Table 13 was compiled using slightly less mature models. This earlier data
similarly showed that running a second iteration was a good idea, as it provided 19%
performance improvement with respect to the base algorithms. Table 14 shows the
110
performance of each of the algorithms when run with a second iteration, using these
earlier area and delay models.
Table 14. The search algorithms run with a second iteration, results from old area and delay models.
Results are normalized area*delay
Algorithms Run With Second Iteration, Old Models
Hill Descent
Succ. Refinement Choose N Regions
Run M Points
Arch
A*D Runs Arch
A*D Runs Arch
A*D Runs Arch
A*D Runs
Combinational 12-29-4 2.37
24 12-71-4 1.27 109 12-71-4 1.27
60 12-70-4 1.00
99
Sequential
14-27-5 1.19
16 14-38-4 1.19
92 14-38-4 1.19
54 14-38-4 1.00
97
Floating Point
9-28-5 2.97
21 8-18-2 1.00
94 8-18-2 1.00 104 8-18-2 1.00 134
Arithmetic
10-22-2 1.10
18 10-22-2 1.10
69 10-22-2 1.10
76 10-22-2 1.00 133
Encryption
8-17-2 1.43
20 15-68-4 1.00 117 8-32-2 1.00
78 8-32-2 1.00 116
Geo. Mean
1.68 19.6
1.11 94.7
1.11 72.5
1.00 114.7
Domain
We again see that the Successive Refinement, Choose N Regions, and Run M Points
algorithms all worked well when run with a second iteration. Using this old model,
however, it was the Run M Points algorithm that was clearly better than any of the other
algorithms. In fact, the architectures shown in Table 14 for the Run M Points algorithm
were the best architectures we found for each domain: even running radial searches was
unable to improve upon these architectures.
When considering the results in both Table 13 and Table 14, the Run M Points
algorithm with a second iteration is shown to be our best algorithm. It provided the best
architectures when considered across both the new and old sets of area/delay models, and
requires only slightly more runs than the Successive Refinement and Choose N Regions
algorithms.
But is it fair to consider results that were obtained from using slightly less mature
area and delay models? We think that it is quite reasonable, and in fact that it is a good
idea.
Our work provides guidelines for how to create domain-specific CPLD
architectures, but the methods that we employ are certainly not the only methods
available. For example, if our architectures used a CMOS design style rather than a
pseudo-nMOS style, it would result in very different area and delay models. We would
want our chosen search algorithm to work well on these new models as well as the
current models.
As such, it makes sense that we would consider multiple sets of
area/delay models when choosing the best search algorithm. We have determined that
111
the Run M Points algorithm with a second iteration is our best algorithm, so all future
results will show architectures that were obtained using this algorithm.
7.5.1
Benefits of Domain-Specific Devices
For a given domain, our tool flow provides us with an architecture that efficiently
supports the circuits in the domain. This has provided us with architectures for five
different domains, but how do these domain-specific architectures compare to some
representative fixed architectures? Table 15 compares the performance of our domainspecific architectures with the three representative fixed architectures mentioned above.
Table 15. Performance of domain-specific architectures and fixed architectures.
normalized area*delay
Domain
Combinational
Sequential
Floating Point
Arithmetic
Encryption
Geo. Mean
Domain Specific
Arch
12-70-4
14-38-4
8-18-2
10-22-2
8-32-2
A*D
1.00
1.00
1.00
1.00
1.00
1.00
Results are
Xilinx
El Gamal Observed
36-48-16 10-12-4
10-20-5
A*D
A*D
A*D
9.40
9.46
4.10
2.28
2.67
2.35
31.60
14.58
9.00
46.49
46.71
18.73
7.43
4.28
3.22
11.85
9.41
5.55
From Table 15 it is apparent that creating domain-specific CPLD architectures is a
win over using fixed architectures. For each of the five domains that we considered, the
algorithms that we developed always came up with a better CPLD architecture than any
of the fixed architectures. Considering the mean performance, the fixed architectures
perform 5.6x to 11.9x worse than our domain-specific architectures.
The results shown in Table 15 for implementing the floating point and arithmetic
domains on fixed architectures are surprisingly bad, and require some explanation. The
mappings of the three largest circuits from the floating-point domain are shown in Table
16. On the Xilinx architecture, the mappings are slightly better than the domain-specific
mappings in terms of depth and number of PLAs, but the performance degradation comes
from the fact that the Xilinx architecture uses so many PLA outputs, as the size of a
CPLD scales quadratically with respect to PLA outputs. The El Gamal and Observed
architectures also suffer from the area required by larger PLA output counts, and they
112
require more PLAs than the domain-specific mapping: CPLDs also scale quadratically
with respect to the number of PLAs in an architecture.
Table 16. Mapping results for the three largest circuits in the floating-point domain
Domain-Specific
8-18-2
PLAs
Depth
672
39
571
50
423
102
Circuit
FPMult
fp_mul
fpdiv
Xilinx
36-48-16
PLAs
Depth
464
18
456
26
197
53
El Gamal
10-12-4
PLAs
Depth
1088
25
1194
32
503
80
Observed
10-20-5
PLAs
Depth
762
20
954
27
440
72
Table 17 displays the mappings of the four largest circuits in the arithmetic domain.
The poor results achieved by the Xilinx architecture are again due to the large number of
PLA outputs in this architecture, as the Xilinx mappings are similar enough to the
domain-specific mappings that they do not overcome this area penalty. The El Gamal
and Observed architectures again suffer penalties from both increased PLA output counts,
and from an increased number of PLAs in the architecture.
Table 17. Mapping results for the four largest circuits in the arithmetic domain
Circuit
Div
MultAddShift
Mult
MultBooth3
Domain-Specific
10-22-2
PLAs
Depth
149
136
196
29
276
34
235
11
Xilinx
36-48-16
PLAs
Depth
174
64
247
26
235
19
93
7
El Gamal
10-12-4
PLAs
Depth
394
84
854
29
598
23
208
10
Observed
10-20-5
PLAs
Depth
383
70
590
29
540
19
186
8
Examining these results, it is likely that the fixed architectures in Table 15 are not
the best possible fixed architectures for our set of domains. In fact, we have already
found the architectures that each domain prefers, so it makes sense that these
architectures might work well as fixed architectures. Table 18 shows how these new
fixed architectures compare to the architectures obtained using our chosen algorithm.
Our domain-specific architecture outperforms the new fixed architectures by 1.8x to 2.5x,
even though we have hand selected the fixed architectures to go well with our domains.
This shows that even if you manage to pick the best possible domain-generic fixed
architecture, there is a bound as to how close you can come to domain-specific results –
in this case, domain-specific beats fixed architectures by 1.8x.
113
Table 18. Results of running each domain on the best domain-specific architectures found. Results
are normalized area*delay
Domain
Combinational
Sequential
Floating Point
Arithmetic
Encryption
Geo. Mean
Best 12-70-4 14-38-4 8-18-2 10-22-2 8-32-2
1.00
1.00
2.74
3.61
4.38
2.83
1.00
2.22
1.00
3.61
2.85
4.13
1.00
3.90
4.24
1.00
1.14
1.02
1.00
6.21
6.80
1.82
1.00
1.80
1.00
1.20
1.28
1.01
1.39
1.00
1.00
2.30
2.52
1.89
1.82
1.85
As a final test, we combined the circuits from our five domains into one domain, and
ran the architecture generation flow on this new “consensus” domain. While the domaingeneric architectures found in Table 18 were found to be effective at supporting specific
domains, the architecture that we find for this consensus domain should be effective at
supporting all of our domains. Table 19 shows the results of implementing each of our
five domains on the architecture found for the consensus domain, which uses 13-79-4
PLAs, and compares these results to the domain-specific results.
Table 19. Results of running each domain on the architecture found for the "consensus" domain.
Results are normalized area*delay
Domain
Combinational
Sequential
Floating Point
Arithmetic
Encryption
Geo. Mean
Best Alg
1.00
1.00
1.00
1.00
1.00
1.00
13-79-4
1.09
2.04
5.18
3.49
0.96
2.07
As Table 19 displays, using this new consensus architecture as a fixed architecture is
actually less effective than some of the architectures we used in Table 18. The circuits in
the encryption domain dominate the size of this new consensus domain, and this has
caused the consensus architecture to support the encryption domain very effectively
(actually better than our domain-specific architecture), while sacrificing performance on
the sequential, floating-point, and arithmetic domains. This data is again showing that,
even when the best domain-generic architectures are chosen, they will still perform about
2x worse than domain-specific architectures in terms of area-delay product.
114
7.5.2
Using Other Evaluation Metrics
We have been running our algorithms with the goal of finding a domain-specific
architecture with a minimal area-delay product. While this is a reasonable metric, it is
also reasonable to believe that many SoC designers will want to optimize for only area, or
only delay. In order to address this issue, we have run our chosen algorithm in both area
driven and delay driven modes. Table 20 displays the results of running our chosen
algorithm on each of our five domains for area-delay driven, area driven, and delay
driven modes. All results are normalized to the area-delay driven results.
Table 20. Results of running our chosen algorithm in area-delay driven, area driven, and delay
driven modes for full-crossbar based CPLDs. Results are normalized to area-delay driven values
Full
XBAR
comb
seq
fp
arith
enc
GeoMean
Area*Delay Driven
Area
Delay
A*D
1.00
1.00
1.00
1.00
1.00
1.00
1.00
1.00
1.00
1.00
1.00
1.00
1.00
1.00
1.00
1.00
1.00
1.00
Area
0.97
1.06
1.00
0.99
0.99
1.00
Area Driven
Delay
1.01
0.95
1.01
1.04
1.01
1.00
A*D
0.97
1.01
1.00
1.03
1.00
1.00
Area
1.12
1.18
1.55
3.52
3.41
1.90
Delay Driven
Delay
0.94
0.92
0.97
0.91
0.58
0.85
A*D
1.05
1.09
1.50
3.18
1.98
1.61
As Table 20 displays, running our algorithm in area driven mode does not have a
very large effect on our results, while using delay driven mode gives us noticeably better
delay characteristics at a severe cost to area. PLAmap primarily attempts to minimize
mapping depth (delay), and then applies heuristics that are used to minimize the area of
the mapping. Because of this, PLAmap always does a relatively good job of minimizing
delay, but often fails to minimize the area effectively. This is shown most clearly in the
delay driven results, where the delay characteristics of the architecture have been
optimized so effectively that the heuristics applied for area improvements were largely
ineffective. Both the area-delay driven and area driven results are sensitive to the area of
the architecture, and so they both tend toward architectures that are slightly less delay
optimized but which are successfully able to apply the area minimization heuristics. This
leads the area-delay and area driven results to be similar, as they are both largely driven
by the success of the area minimization heuristics.
Table 20 shows that, for full-crossbar based CPLD architectures, using a delay
driven metric can provide architectures that use .85x the delay and 1.90x the area of
115
results obtained using area-delay product as the metric.
The table also shows that
architectures obtained using an area driven metric are basically equivalent to the
architectures obtained using area-delay product.
7.6 Conclusions
This chapter presented a tool flow aimed at tailoring the PLAs in a CPLD to specific
application domains. This included an Architecture Generator that could use any of four
search algorithms to find a good PLA-size for the architecture, as well as a Layout
Generator which tiles pre-made layouts into a full layout.
When compared to realistic fixed CPLD architectures, the domain-specific
architectures perform 5.6x to 11.9x better in terms of area-delay product. Even when we
hand picked the fixed architectures to be those that were found by our algorithms, our
domain-specific architectures still performed at least 1.8x better than fixed architectures.
Additionally, iterating the algorithms and performing radial searches around the chosen
architectural points show that our algorithms are finding architectures that are within .18x
of the best architectures that we can easily find.
We also examined using either area or delay as the evaluation metric, instead of areadelay product. Using an area driven mode provided near equivalent results to using areadelay product, but using a delay driven mode we were able to reduce the delay by 15%
when compared to area-delay driven results. This is because we were able to find
architectures that PLAmap successfully optimized for depth, at a slight cost to area.
Running the Run M Points algorithm with a second iteration provided the best results
in terms of performance, at only a small increase to runtime over other algorithms. The
Run M Points algorithm has thus been chosen as the preferred method for tailoring CPLD
logic to an application domain, and will be used exclusively for future explorations.
116
8 Routing in Domain-Specific CPLDs
In the previous chapter we presented a tool flow that creates crossbar-based CPLDs
that are tailored to specific application domains. Those CPLDs are interconnected using
a crossbar interconnect that is fully populated with switches. Full crossbars require a
large amount of area, since their size scales quadratically with respect to PLA count.
This area inflation is one reason that commercial CPLDs don’t come in very large sizes.
The area effects of using crossbar-based CPLDs can be seen in Table 21. Table 21
lists the areas of the domain-specific architectures that we found in chapter 7 normalized
to the sequential domain, along with the percentage of area devoted to the CPLD’s
routing resources. As the table shows, the routing area is reasonable for quite small
architectures (only 61.5% for the sequential domain), but as architectures get larger the
percentage of the area that is used for routing becomes prohibitively large. For the
encryption domain, the routing resources utilize 75x more area than the logic resources.
Table 21. Area required by routing resources for crossbar-based CPLDs from the previous chapter
Domain
Sequential
Arithmetic
Combinational
Floating Point
Encryption
Normalized Area
1.00
21.03
22.12
97.26
1006.85
Routing Area
61.5%
93.0%
84.5%
96.8%
98.7%
This chapter presents a method for reducing the size of the CPLD’s routing structure
by reducing the number of switches in the crossbars. For the remainder of this section,
we will define a crossbar as the connection matrix that provides connectivity between the
general interconnect wires and the input wires of a PLA.
Figure 71 displays this
definition, showing a full crossbar on the left and a sparse crossbar on the right. Note
that this crossbar is repeated for each PLA in the CPLD architecture. In this section we
will be creating sparse crossbars for our CPLDs, which will provide area and delay gains
117
over full crossbars, but will also require the development of techniques to ensure
routability.
Full Crossbar
PLA1
PLA2
PLA3
Sparse Crossbar
PLA1
PLA2
PLA3
Figure 71. A full crossbar (left) and a sparse crossbar (right). Note that the crossbar gets repeated
for each PLA in the CPLD architecture
8.1 Crossbars
The advantage of using a full crossbar is that it provides full connectivity between
input and output wires, which makes the routing of signals through the crossbar trivial.
As Figure 72 shows, each output wire in a full crossbar can be connected to any input
wire, and multiple outputs can connect to the same input.
Outputs
Inputs
Figure 72. In a full crossbar, output lines can be connected to any input line
118
A simple full crossbar with n inputs and m outputs requires n*m switches. The
capacity of a crossbar, c, is the largest number of inputs in a crossbar that are always
routable to outputs. A full crossbar provides the maximum capacity possible, as c=m.
In the CPLD architectures that we create, the outputs of the crossbars are directly
connected to PLA inputs. One characteristic of PLAs is that their inputs are permutable,
so it doesn’t matter which input any given signal arrives on, just that it arrives. This
means that full crossbars provide more flexibility than we need, as our only requirement
is that the crossbars provide full capacity.
Crossbars can provide full capacity without requiring switches in every location.
This can be done with a “minimal full-capacity” (abbreviated minimal from here forward)
crossbar, like that shown in Figure 73. In the figure, the top 4 input wires can only be
switched onto a specific output wire, while the remaining input wires are fully connected
to the outputs. This style can be generalized for a crossbar with n inputs and m outputs
by saying that each of the top m inputs can be switched onto a specific output wire, while
the bottom (n-m) inputs will be fully connected to the outputs.
Outputs
Inputs
Figure 73. A minimal crossbar that provides full capacity
The number of switches required in a minimal crossbar is shown in Equation 19
(REF). As can be seen from the equation, if m ≈ n then p will be relatively small. For
crossbars that are nearly square, therefore, it is efficient to provide full connectivity using
one of these minimal crossbars. In our crossbars, however, we have a situation where
n>>m. Plugging this into Equation 19, it is apparent that the number of switches in a
119
minimal crossbar approaches n*m, and there is very little advantage gained from using
the minimal crossbar.
p = (n − m + 1) * m
(19)
It is clear that we will not be able to decrease the sizes of our crossbars while
maintaining full capacity. Crossbars that do not provide full capacity are called “sparse”
crossbars.
8.2 Sparse-Crossbar Generation
When creating sparse crossbars, the objective is to maximize the routability of the
crossbar for a given switch count, where routability is defined as the likelihood that an
arbitrarily chosen subset of inputs can be connected to outputs. While switch placement
is deterministic for crossbars that provide full capacity, it is not obvious how the switches
should be placed in a sparse crossbar in order to maximize routability. This problem,
though, has been effectively addressed by a sparse-crossbar-generation tool created by
Lemieux and Lewis [53].
The switch placement problem can be generalized by saying that subsets of input
wires should span as many output wires as possible in order to provide maximum
routability. So for a given set of input wires, we want to maximize the number of output
wires that can be reached by those input wires. This makes intuitive sense, as providing a
larger set of reachable outputs should make it more likely that each input can be assigned
to a unique output. Figure 74 gives an example of this. In the left crossbar, every subset
of four input wires spans all four output wires, and it turns out that this crossbar provides
a capacity of 4. In the crossbar on the right, the subset {a, b, e, f} spans only three output
wires, and therefore cannot be routed. This crossbar only has a capacity of 3.
Equation 20 displays how many input wire subsets exist for a crossbar with n inputs.
Clearly, we cannot maximize the span of this many subsets if n is even marginally large.
Because of this, we will simplify the problem to only considering input wire pairs. This
is a reasonable simplification to make, because we can find the span of large input groups
simply by unioning the spans of smaller input groups. An example of this is shown in
120
Equation 21. By spreading out the switches between every pair of input wires we will
maximize our routability, while only having to consider O(n2) subsets.
a
b
c
d
e
f
a
b
c
d
e
f
Figure 74. The crossbar on the left provides c=4, while the crossbar on the right only provides c=3.
Only one switch is in a different location on the right (on wire f), but it reduces the number of
outputs that are reachable by the input subset {a, b, e, f}
n
∑
n
(20)
Cl
l =2
outputSpan{a, b, c, d } = outputSpan{a, b} ∪ outputSpan{c, d }
(21)
Spreading out the switches between every pair of input wires is very similar to the
strategy used for creating communication codes. In fact, our problem can be mapped into
the communication code problem very easily. The locations where switches are placed
on an input wire can be represented by a vector of 1s (where switches are present) and 0s
(not present). Each vector is of length m, and there are n such vectors. An example of
this is shown in Figure 75.
4 Outputs
6 Inputs
1000
0100
0010
0001
1111
1111
Figure 75. Representing the input lines as vectors of 1s and 0s
121
When represented in this fashion, spreading out the switches between two input
wires is the same as maximizing the Hamming distance between the wires.
The
Hamming distance between two vectors is the sum of the bitwise XOR of the vectors.
Figure 76 gives some examples of switch placements, their vector representations, and
the resulting hamming distances. It is clear from the figure that the hamming distance
increases as the switches are spread out among the output wires.
Crossbar
Vectors
Hamming
Distance
1001
0110
4
1010
0110
2
0110
0110
0
1010
0111
3
Figure 76. Some crossbars, their vector representations, and their hamming distances
Maximizing the minimum Hamming distance between vectors is a common code
design technique, and the cost function in Equation 22 is one that has been used in
practice [54]. In the equation, bvx and bvy represent the bit vectors for input rows x and y
respectively.
An efficient switch placement can be found by minimizing this cost
function across all the vectors representing the crossbar input lines.
SwitchPlacementCost =
1
2
∀x , y| x ≠ y HammingDistance(bv x , bv y )
∑
(22)
One thing to note about Equation 22 is that, if the hamming distance of two vectors
is 0, then the cost is undefined. This works fine for communication codes, as it is illegal
to have two vectors with a hamming distance of 0 because the codes would be
122
indistinguishable from each other. In our application, however, two input lines can have
the same switch patterns and still be useful, so we must define a cost for this situation.
Moving from a hamming distance of 2 to 1 causes the cost to change by a factor of 4
(from ¼ to 1), so we decided that it would be reasonable for a move from 1 to 0 to change
the cost function by the same factor. Vectors with a hamming distance of 0 therefore
incur a cost of 4.
This rest of this subsection will introduce our implementation of the sparse-crossbargeneration algorithm from [53]. The goal of the algorithm is to create a sparse crossbar
of maximum routability given the values n (inputs), m (outputs), and p (switches). The
top level pseudocode for this process is shown in Figure 77.
switchPlacementAlgorithm()
{
input n, m, p;
output sw[n][m];
//crossbar has n inputs, m outputs, p switches
//switch placement matrix
initialSwitchPlacement(n, m, p, sw);
makeSwitchMoves(n, m, sw);
smoothSwitches(n, m, p, sw)
return sw
}
Figure 77. Top level pseudocode for the switch placement algorithm
8.2.1
Initial Switch Placement
To initiate the algorithm, p switches must be placed such that they are evenly
distributed both on the input and output lines.
We define the number of switches
connected to an input wire is its fanout, and the number of switches connected to an
output wire is its fanin. To be evenly distributed, we require that the fanout of any input
line differ from any other input line by no more than 1. Similarly, we require that the
fanin of any output line differ from any other output line by no more than 1. Requiring a
123
smooth switch distribution will help us obtain good routability, as each line will be
roughly as connected as any other line. The initial switch placement is performed
deterministically, using the algorithm in Figure 78.
initialSwitchPlacement(n, m, p, sw) // n inputs, m outputs, p switches
{
fanin = ceil(p/m);
switches_left = p;
switches_placed_on_output = 0;
current_in = 0;
current_out = 0;
//initialize switch matrix to 0
for(i=0; i<n; i++) {
for( j=0; j<m; j++) {
sw[i][j] = 0;
}
}
//place switches in matrix such that they are balanced
//across inputs and outputs respectively
while(switches_left > 0) {
sw[current_in][current_out] = 1;
switches_left--;
//cycle through inputs, top to bottom
if(++current_in == n) {
current_in = 0;
}
//cycle through outputs, left to right, obeying fanin
if(++switches_placed_on_output == fanin) {
current_out++;
switches_placed_on_output = 0;
fanin = ceil(p/m);
}
}
}
Figure 78. Pseudocode for initial switch placement algorithm
124
An example of an initial switch placement is shown in Figure 79, which displays a
crossbar with 12 inputs, 8 outputs, and 53 switches. One thing to note about the initial
placement is that output lines on the left will receive more switches than those on the
right if p %m ≠ 0 . This will not have any negative impact on our routing, however, since
the crossbar outputs directly feed the PLA inputs, which are freely permutable. For
example, nothing is lost by making PLA0_Input1 slightly easier to route to than
PLA0_Input15.
The initial placement algorithm also works such that input lines near the top will
receive more switches than those on the bottom if p %n ≠ 0 . If the crossbar remained
like this, the PLAs that feed their outputs to the upper interconnect wires (and thus the
upper crossbar wires) would have a routing advantage over PLAs that feed their outputs
to lower interconnect wires. This potential problem is alleviated by the switch smoothing
algorithm described in section 1.2.4, which redistributes the crossbar such that crossbar
input lines with higher fanout are not grouped together.
Figure 79. The initial switch placement for a 12-input, 8-output, 53-switch crossbar
125
There is a negative impact from this uneven switch fanout, however. Different
horizontal routing tracks will see different numbers of switches in their signal paths, and
will thus have slightly different delay characteristics. Since we repeat the same sparse
crossbar at each PLA within the CPLD architecture, this difference in switch fanout is
multiplied by the number of PLAs in the architecture. Thus, across the span of the
CPLD, some horizontal routing tracks can have PLA_Count more switches on them than
other tracks.
8.2.2
Moving Switches
The switches are initially placed in a very regular manner, so in order to obtain good
routability from our sparse crossbar we must be able to move the switches around. We
must be careful, however, to move the switches in such a way that they are still evenly
distributed among the input and output lines. In order to obtain this behavior, we ensure
that switch movements do not change the number of switches that exist on an input or
output line.
Figure 80 displays the two switch movements that we allow. At the intersection of
two input lines and two output lines, if switches exist on one of the diagonals but not on
the other diagonal then the switches can be moved as shown. This ensures that each of
the input and output lines retains the same number of switches.
Figure 81 shows the switch movement algorithm as implemented. When a switch
move is proposed, the cost function is updated by recalculating the hamming costs
involving only the vectors being altered. Lemieux and Lewis initially used simulated
annealing to conditionally accept moves based on cost and temperature criteria, but they
found that negative cost moves were nearly always found again and undone, and that a
greedy scheme worked just as well. We therefore reproduce this, and use a purely greedy
strategy for accepting moves.
126
Figure 80. Allowable switch moves. Switches must occur on one diagonal of the intersecting lines,
but not on the other diagonal
Figure 82 provides evidence that the algorithm developed by Lemieux and Lewis is
in fact providing highly routable sparse crossbars. The graph shows the routability of
various 80-input, 12-output, 160-switch sparse crossbars. The x-axis shows the test
vector size (number of inputs), and the y-axis shows the percentage of vectors that were
successfully routed at each size.
127
makeSwitchMoves(n, m, sw)
{
possible_outs[]; //output lines with legal moves – initially empty
for(i=0; i<(n*m); i++) { //try n*m moves
n1 = chooseRandomInputLine(sw); //get first input line
while(possible_outs.isEmpty()) {
n2 = chooseRandomInputLines(sw); //get second input line
possible_outs = identifyPossibleOutputMoves(n1, n2); //legal moves
}
//get output lines
m1 = chooseRandomOutputLine(n1, n2, sw, possible_outs);
m2 = chooseRandomOutputLine(n1, n2, sw, possible_outs);
//while they don’t make a legal move, change m2
while(!isLegalMove(n1, n2, m1, m2)) {
m2 = chooseRandomOutputLine(n1, n2, sw, possible_outs);
}
preCost = cost(n1, n2, sw); //initial cost
//move the chosen switches
moveSwitches(n1, n2, m1, m2);
postCost = cost(n1, n2, sw); //new cost
//undo the move if it was bad
if(postCost > preCost) {
moveSwitches(n1, n2, m1, m2);
}
possible_outs.makeEmpty();
//reset our possible moves to empty
}
}
Figure 81. Pseudocode for the switch movement algorithm
128
Figure 82. Routability results from several different switch patterns [53]
The most successful crossbar was created by the algorithm described herein, beating
out a manual switch pattern sparse crossbar that was meticulously hand-generated by a
PLD designer. Also included on the graph are lines for the best random switch pattern
generated (out of a large set), the average across several random switch patterns, and a
partial-crossbar pattern akin to that used in the HP Plasma architecture. These results
give us confidence that we are getting efficient crossbars out of our sparse crossbar
generation tool.
8.2.3
Algorithm Termination
The algorithm in [53] allows the user to specify how many switch movements are
attempted. Our process is automated, however, so we needed to determine how many
switch moves should be attempted as a function of n, m, and p in order to obtain a good
sparse crossbar. Experiments showed that attempting n*m switch moves provided good
results with a reasonable runtime: beyond this number of moves, the tool was never able
129
to improve the cost function by more than an additional 1% regardless of how many
moves were attempted.
8.2.4
Switch Smoothing
The resulting sparse crossbar has a switch distribution that is going to look fairly
random. Because of this, there are likely to be regions in the crossbar that have relatively
high switch densities, as well as regions that have relatively low switch densities. The
preceding algorithm has ensured that our crossbar is highly routable, but it has not
ensured that the switches are spread out in such a manner that they will lead to an
efficient layout. This issue of switch smoothing was not considered in the work done by
Lemieux and Lewis [53].
When considering the layout of a crossbar, it is clear that the switches and their
corresponding SRAM bits determine the area required by the crossbar, as the input and
output wires can simply be brought in on metal layers above these devices. In order to
achieve a compact layout, therefore, it is desirable to pack the switches as closely as
possible.
When creating full crossbars, it is easy to route the input lines to the switches
because there is a switch at the intersection of every input and output wire. Figure 83
shows this in cartoon fashion. When we remove switches from the crossbar, however,
there are additional considerations. First of all, the input wires will need to be closer
together since the overall height of the crossbar will decrease (due to fewer switches).
Second, the input wires may now need to connect to switches that are not directly below
the wire: vertical jogs will be required to connect wires to switches that are either north or
south of the input wire’s horizontal track. Figure 84 displays this detail.
In order to keep the switches packed tightly, we must limit the number of vertical
jogs that are required in our sparse crossbars. Otherwise, the pitch required by the
vertical jogs would start to dominate the east-west dimension of the crossbar layout. If
the layout contains N input wire pitches per vertical switch pitch, then we can minimize
the number of vertical jogs by requiring that each output line be attached to exactly one
130
switch for every N input lines. This will ensure that each input line attaches to a switch
that is underneath it. An example of this is shown in Figure 85.
Outputs
Programmable Switch
P
Inputs
Connection Points
Figure 83. Routing full crossbars is easy because there is a programmable switch at the intersection
of every input and output line
Outputs
Inputs
Jogs
Figure 84. Routing sparse crossbars requires us to pack the input lines closer together and to add
wire jogs in order to connect input lines to the proper switches
131
Outputs
Inputs
Figure 85. If each output line is attached to exactly one switch per every N input lines, then every
input line will connect to a switch directly below it, and only one pitch of jogs is required
Since we are creating an effectively random switch placement in our sparse
crossbars, it is unlikely that they will align such that each output has one switch per every
N input lines. The input lines in our sparse crossbar can be permuted, however, so we
can move them around in order to enforce this property.
The pseudocode for
accomplishing this is shown in Figure 86.
The basic principle of the algorithm in Figure 86 is to order the input lines from
north to south such that, after placing input line P, there have been P/N switches placed
on each output line (for N input lines per switch pitch). This is achieved by minimizing
the cost function shown in Equation 23 as each input line is placed. In this equation for
an n input, m output sparse crossbar, x is the current output line, Sx is the number of
switches that have been placed in output line x, P is the current input line, and N is the
number of input lines per switch pitch in the layout. Figure 87 shows an example of
running the switch smoothing algorithm on a sample crossbar, resulting in a smoothed
crossbar. Figure 88 shows the layouts derived from the unsmoothed and smoothed
crossbars from Figure 87, displaying the improvement in the lengths and pitches of the
required wire jogs.
132
smoothSwitches(n, m, p, sw)
{
//matrix to hold the smoothed switch matrix
ordered_sw[n][m];
//how many switches have been placed on each output line
swCount[m];
for(i=0;i<m;i++) { swCount[i]=0; }
//whether we’ve place an input line yet
inPlaced[n];
for(i=0;i<n;i++) { inPlaced[i]=0; }
//switch density
swDens = p/(n*m);
tempCost;
for(i=0;i<n;i++) { //must place n smoothed input lines
tempInput = -1;
bestCost = infinity;
for(j=0;j<n;j++) { //check which of n lines is next
//Calculate the cost of inserting input line j next
tempCost = smoothCost(sw[j], I, swCount, swDens);
if(tempCost < bestCost) {
if(!inPlaced[j])
tempInput = j;
bestCost = tempCost;
}
}
ordered_sw[i] = sw[tempInput]; //set proper line
for(k=0;k<m;,++) {
swCount[k] += ordered_sw[i][k];
}
inPlaced[tempInput] = 1;
}
//set the switch matrix to the smoothed result
sw = ordered_sw;
}
Figure 86. Pseudocode for the switch smoothing algorithm
133
∑ (S
x
−
∀x
P 2
)
N
Unsmoothed
Crossbar
0
0
0
1
0
0
1
0
1
1
0
0
1
0
0
1
0
1
1
0
0
1
0
0
1
1
1
0
0
0
1
1
1
1
0
0
0
0
0
0
10 Inputs
4 Outputs
16 Switches
2.5 wires per
vertical switch
pitch (N)
(23)
Input
Line (P)
Smoothed
Crossbar
Sx
Matrix
Cost
1
0
0
0
1
0
0
0
1
.84
2
0
1
1
0
0
1
1
1
.76
3
1
0
0
0
1
1
1
1
.64
4
0
0
1
1
1
1
2
2
1.04
5
1
1
0
0
2
2
2
2
.00
6
0
0
1
0
2
2
3
2
.84
7
0
1
0
1
2
3
3
3
.76
8
1
0
0
1
3
3
3
4
.76
9
1
0
1
0
4
3
4
4
.84
10
0
1
0
0
4
4
4
4
.00
Progress
Figure 87. Each step in the switch smoothing algorithm is displayed for the smoothing of the
crossbar on the left
Figure 88. Representative layouts of the unsmoothed (left) and smoothed (right) crossbars from
Figure 87. Notice that the switch smoothing algorithm has reduced the jog pitch to near minimum,
and has reduced the jog congestion significantly
We have chosen a layout style that restricts us to 8 or fewer jog pitches per crossbar
output. This means that any crossbar requiring more than 8 jog pitches would force us to
spread out our switches in the east-west direction, wasting area in our final layout. Table
134
22 displays the pre-smoothing and post-smoothing jog pitches required of the sparse
crossbars that we created for our five domains (the performance of these architectures
appears later in this section). As the table shows, four of the five crossbars would have
resulted in area penalties in the final layouts if the crossbar-smoothing algorithm had not
been applied. Also note that the final smoothed crossbars easily meet our requirement of
8 or fewer jog pitches.
Table 22. Results of running the switch smoothing algorithm on crossbars acquired for each domain
Domain
Sequential
Arithmetic
Combinational
Floating Point
Encryption
Inputs
155
613
735
1574
5002
Crossbar
Outputs Switches
14
293
21
1216
14
2647
18
4627
23
32099
Required Jog Pitches
Pre-Smoothing Post-Smoothing
6
2
12
3
19
2
17
3
48
3
8.3 Routing for CPLDs with Sparse Crossbars
Our sparse crossbars do not provide full capacity, so we will have to use a routing
algorithm in order to ensure that signals can reach their destinations. PLAmap provides
the necessary mapping information, which includes the inputs and outputs of each PLA in
the CPLD mapping. The inputs and outputs of a PLA are completely permutable, and we
are using a complete network implementation, so this results in a very simple routing
graph. Only two types of routing decisions need to be made: which horizontal routing
track a PLA output will connect to, and which PLA input track a horizontal routing track
will connect to.
Figure 89 shows a simple CPLD with sparse crossbars, and the
corresponding routing graph for the architecture.
We decided to use the Pathfinder [55] routing algorithm for our CPLD architectures.
All of our resources are of similar delay, so we can use their negotiated congestion router,
which does not account for delay. The corresponding cost function for using a resource
is shown in Equation 24, where bn is the base cost, hn is the history cost, and pn is the
sharing cost. We set bn to 0 so that the cost function simply considers hn * p n , and we
allow the algorithm to run for 1000 iterations before judging a mapping to be unroutable
135
with a given sparse crossbar. We can use an extremely large number of iterations
because of how simple our routing graphs are: a single iteration of the pathfinder
algorithm on our largest architecture takes only a couple seconds.
Primary
Inputs
PLA1
PLA2
PLA3
P.I.
PLA1
PLA2
PLA1
PLA2
PLA3
PLA3
Figure 89. A simple CPLD and its routing graph
cost n = (bn + hn ) * p n
(24)
136
8.4 Determining Switch Density of Sparse Crossbars
In order to determine how many switches our crossbars need, we perform a binary
search on the crossbar switch count. This is shown in pseudocode in Figure 90. For an n
input, m output crossbar, the minimum switch count is n and the maximum switch count
is n*m. Starting with a crossbar with .5(n*m) switches, we iteratively create a sparse
crossbar and route on the specified CPLD architecture, adjusting the switch count
according to whether our route fails or succeeds. We do this to maximum granularity,
which requires only log (n*m) iterations of the router.
8.5 Results
Our goal in using sparse crossbars is to reduce the overall area that our CPLD
architectures require, so we should start by examining how much of a reduction we can
obtain. Table 23 displays the area, delay, and area-delay product results obtained by
using sparse crossbars in the CPLD architectures that were found in the previous chapter.
The table shows that CPLDs with sparse crossbars require only 40% of the area that
CPLDs with full crossbars require, validating our use of sparse crossbars. Removing
connectivity from the crossbars also results in improved delay performance due to
decreased capacitance on our interconnect paths. The table shows that the delay of
sparse-crossbar-based CPLDs is only 40% that of full-crossbar-based CPLDs.
Combining the two terms to form area-delay product, we see that sparse-crossbar-based
CPLDs require only .16x the area-delay product of full-crossbar-based CPLDs.
One surprising result from Table 23 is that the area reductions obtained by using
sparse crossbars seem to be independent of the routing area of the full-crossbar CPLD
architecture. Intuitively, it seems that an architecture whose routing fabric requires more
of the CPLD area would have more to gain from using sparse crossbars, suggesting that
the encryption domain (98.7% routing) should benefit more than the sequential domain
(61.5% routing). The data in Table 23, however, shows little correlation between area
reduction and the sizes of the routing fabrics in the architectures, which we saw in Table
21.
137
findSwitchCount(n, m)
{
//min and max possible switch counts for binary search
min = n;
max = n*m;
swCount = (max+min)/2; //current switch count we’re attempting
while(swCount != min && swCount != max) {
sw = switchPlacementAlgorithm(n, m, swCount); //create crossbar
//attempt to route, adjust swCount according to success/failure
if(runPathfinder(circuits, sw)) {
max = swCount;
swCount = (min+swCount)/2;
} else {
min = swCount;
swCount = (max+swCount)/2;
}
}
return sw[n][m];
}
Figure 90. Pseudocode for using a binary search to find the smallest sparse crossbar that the CPLD
successfully routes on
The reason that the sparse crossbars are providing similar area improvements is that
the sparseness of the crossbars is varying according to the size of the CPLD. The circuits
in the sequential domain have fewer signals to route, and they can therefore subsist on
very sparse crossbars. The circuits in the encryption domain, however, have a large
number of signals to route, and require more connectivity in their crossbars. Table 24
displays this phenomenon, listing the crossbar switch densities of the different domains
and relating it to the sizes of the respective CPLD architectures using these sparse
crossbars.
138
Table 23. Performance comparison between full-crossbar results and sparse-crossbar results for the
architectures found in the last chapter
Domain
Sequential
Arithmetic
Combinational
Floating Point
Encryption
Geo. Mean
Arch
14-38-4
10-22-2
12-70-4
8-18-2
8-32-2
Full Crossbar
Area Delay
1.00
1.00
1.00
1.00
1.00
1.00
1.00
1.00
1.00
1.00
1.00
1.00
A*D
1.00
1.00
1.00
1.00
1.00
1.00
Sparse Crossbar
Arch
Area Delay
14-38-4
0.48
0.44
10-22-2
0.37
0.35
12-70-4
0.33
0.37
8-18-2
0.40
0.41
8-32-2
0.46
0.47
0.40
0.40
A*D
0.21
0.13
0.12
0.16
0.22
0.16
Table 24. Switch densities of sparse crossbars related to the area of the sparse-crossbar-based CPLD
Domain
Sequential
Combinational
Arithmetic
Floating Point
Encryption
Normalized Area
1.00
15.19
16.19
81.66
961.32
Switch Density
13.6%
20.0%
28.8%
35.5%
41.8%
Now that we are using sparse crossbars, with augmented area and delay models to
account for their effects, we might expect the Architecture Generator to find different
architectures than those it found for CPLDs with full crossbars. This is exactly what
happened, as the new models led the Architecture Generator to find a new architecture
for each of the domains that we are considering. Table 25 displays the architecture
results obtained by our tool flow using the new area and delay models, and compares the
results to those found in the previous chapter. The best sparse-crossbar-based CPLDs are
shown to require .37x the area, .30x the delay, and .11x the area-delay product of our best
full-crossbar-based CPLDs.
Table 25. Best results found for full and sparse-crossbar-based CPLDs
Domain
Sequential
Arithmetic
Combinational
Floating Point
Encryption
Geo. Mean
Arch
14-38-4
10-22-2
12-70-4
8-18-2
8-32-2
Full Crossbar
Area Delay
1.00
1.00
1.00
1.00
1.00
1.00
1.00
1.00
1.00
1.00
1.00
1.00
A*D
1.00
1.00
1.00
1.00
1.00
1.00
Sparse Crossbar
Arch
Area Delay
14-18-4
0.36
0.48
3-16-2
0.31
0.25
14-52-3
0.40
0.39
18-55-3
0.37
0.21
23-79-4
0.41
0.27
0.37
0.30
A*D
0.17
0.08
0.15
0.08
0.11
0.11
139
8.5.1
Using Other Evaluation Metrics
As with our full-crossbar based CPLD flow, we also ran our sparse-crossbar based
CPLD flow in both area driven and delay driven modes. The results of this are shown in
Table 26, which displays the results of running our chosen algorithm on each of our five
domains for area-delay driven, area driven, and delay driven metrics. All results are
again normalized to the area-delay driven results.
Table 26. Results of running our chosen algorithm in area-delay driven, area driven, and delay
driven modes for sparse-crossbar based CPLDs
Sparse
XBAR
comb
seq
fp
arith
enc
GeoMean
Area*Delay Driven
Area
Delay
A*D
1.00
1.00
1.00
1.00
1.00
1.00
1.00
1.00
1.00
1.00
1.00
1.00
1.00
1.00
1.00
1.00
1.00
1.00
Area
0.80
1.07
0.92
0.93
1.04
0.95
Area Driven
Delay
0.93
1.17
1.74
1.18
1.43
1.26
A*D
0.75
1.25
1.60
1.10
1.50
1.20
Area
1.13
1.49
1.52
3.39
1.60
1.69
Delay Driven
Delay
0.81
0.83
0.68
0.61
0.48
0.67
A*D
0.91
1.24
1.04
2.08
0.77
1.13
Table 26 shows that, when creating sparse-crossbar based CPLD, both area and
delay driven modes are successful at optimizing for their target metric. Using area as our
metric, our domain-specific architectures require only .95x the area of those found with
area-delay as the metric, and using delay as the metric we find architectures that require
only .67x the delay of those found with area-delay as the metric.
The analysis of Table 26 is very similar to that of Table 20, which showed results for
full-crossbar based CPLDs. Using delay as our metric, we are able to find architectures
where PLAmap was very successful at optimizing for delay (.67x of area-delay driven),
but not successful at optimizing for area (1.69x of area-delay driven). The area driven
results are again very close to the area-delay driven results, requiring .95x the area and
1.26x the delay of the architectures found using area-delay as the metric. Basically, when
PLAmap is very successful at optimizing for delay, it causes the area minimizing
heuristics to be less successful. These are the architectures found by delay driven mode.
Conversely, when PLAmap is not as successful at delay optimization, the area
minimizing heuristics are more successful. These are the architectures found by area
driven mode.
140
An interesting side note from Table 26 is that three of our area and delay driven
architectures actually provide better area-delay performance than our area-delay driven
architectures. This is an artifact of the fact that we must route our circuits on these
sparse-crossbar based CPLDs architectures, determining the minimum switch count on
which the circuits will route. The points that display improved area-delay performance
are instances where the router was somewhat lucky and successfully routed all the
circuits on a small sparse crossbar, therefore providing better delay and area performance
than was predicted by our models.
8.6 Conclusions
This chapter introduced the use of sparse crossbars in our CPLD architectures,
including the methods used to create the sparse crossbars for a specific architecture.
Sparse crossbars decrease the area and capacitance of the CPLD interconnect structure,
providing area and delay gains over full crossbars. Sparse crossbars do not provide full
capacity, however, so a routing algorithm was introduced to ensure that the CPLD’s
signals can all be routed.
Incorporating sparse crossbars into the architectures found in the previous chapter
resulted in architectures that required .40x the area and .40x the delay of those with full
crossbars. Running the Architecture Generator with new area and delay models was able
to find even better architectures, requiring .37x the area and .30x the delay of those found
in the previous chapter. The performance gains were evenly spread across the domains,
despite the fact that larger CPLDs seem to have more to gain from reducing the routing
area. This was explained by the fact that domains that require more routing resources are
not able to depopulate their crossbars as much as domains that require fewer routing
resources.
Also, using area and delay driven modes, we were able to find architectures that
were more optimized for their respective metrics. Architectures found in area driven
mode required .95x the area and 1.26x the delay of those found using area-delay, and
141
architectures found in delay driven mode required .67x the delay and 1.69x the area of
those found using area-delay as the metric.
142
9 Adding Capacity to Domain-Specific CPLDs
We envision that many SoC designers who use our flow will know the circuits that
they wish to implement in reconfigurable logic on their device. They can simply provide
us with the circuits, and our automated flow will create an architecture that is guaranteed
to efficiently implement their circuits.
Some designers, however, will not necessarily know the circuits they are going to
implement in reconfigurable logic. Perhaps the design of the whole SoC is still being
finalized, and they are unsure of what portions will be implemented in reconfigurable
logic. Another possibility is that the reconfigurable fabric will be used to implement
some common protocol that is going to be updated or modified shortly, and the fabric
will need to support the new version. Along a similar vein, what happens if a bug is
found in the circuit that is being implemented in reconfigurable logic, and it needs to be
slightly modified?
In these examples, the exact circuits that the reconfigurable logic will implement
cannot be provided in the testing set. The designer will likely know the general domain
of these circuits, however, and could therefore provide us with circuits that are similar to
those that the fabric must support. The question then becomes: given a domain of
circuits, how can we create an architecture that not only supports the sample circuits, but
which is as likely as possible to support an unknown circuit in the same domain.
The general solution to this problem is to take the base architecture created by the
tool flow, and to augment it with resources that are similar to what it already includes.
The base architecture will contain a good sample of the resources that the domain
requires, so adding more of these resources should help it support unknown, future
circuits. But is this actually the correct answer, and what exactly does “more of the same
143
resources” mean? Specifically, what resources should be added, and in exactly what
resource mixture? This is the question that is explored in this chapter.
9.1 Adding Capacity to CPLDs
In order to add “capacity” to our CPLDs, we’ll first need to identify the CPLD
architectural characteristics that can be easily augmented. In terms of routing resources,
the complete network implementation of our CPLDs guarantees that every signal is
available to every PLA in the architecture, so simply adding more routing tracks is
unlikely to be beneficial.
We are using sparse crossbars to connect to the PLAs,
however, so the switch density of the crossbars is something that can be modified in order
to support routing rich designs. In terms of logic resources, our CPLDs exclusively use
PLAs. PLAs can be modified in terms of their input, product-term, and output counts,
and we can also modify how many PLAs we have in our architecture. This gives us a
total of five variables to consider when adding capacity: crossbar switch density, PLA
input count, PLA product-term count, PLA output count, and PLA count.
Another thing to note is that the input, product-term, and output counts of PLAs are
related. While it might be beneficial to augment only one of these items in the PLAs in
our architecture, we are more likely to see benefits if we augment all three of the
variables in some intelligent fashion. We have already determined the in-pt-out ratio that
the architectures desire, so our first strategy will be to augment all three variables using
their existing in-pt-out ratio. For a second strategy, we will simultaneously augment each
of the variables by an additive factor.
Lastly, there might be some utility to a strategy that uses larger PLAs AND allows
an increase in PLA count: we will consider this strategy as well, using a fixed
multiplicative factor to make the PLAs larger. Table 27 lists the CPLD augmentation
strategies that we will employ in this section.
For the strategies which have fixed PLA sizes but which allow additional PLAs, we
find our mapping simply by providing PLAmap with the PLA size of the architecture.
PLAmap then provides us with the required PLA count, and the performance
144
characteristics are calculated. For strategies that alter the PLA sizes while keeping the
PLA count fixed, we iteratively call PLAmap with larger and larger PLA sizes (using the
smallest possible increment) until a mapping fits the PLA count constraint. If the PLA
variable(s) in question get increased to three times their initial values without finding a
mapping that fits the PLA count constraint, then it is considered a failure.
Table 27. Strategies for adding capacity to our CPLD architectures
Strategy
Switch Density
PLA Count
PLA Inputs
PLA Product Terms
PLA Outputs
PLA Size1
PLA Size2
PLA Size1 + PLA Count
Notes
Augment the switch density of sparse crossbars by x%, allow extra PLAs.
Allow extra PLAs of the base size.
Augment the input count of each PLA, but keep PLA count fixed.
Augment the pterm count of each PLA, but keep PLA count fixed.
Augment the output count of each PLA, but keep PLA count fixed.
PLA size = (c*in,c*pt,c*out), but keep PLA count fixed.
PLA size = (d+in,d+pt,d+out), but keep PLA count fixed.
PLA size = (c*in,c*pt,c*out), and allow extra PLAs of this size.
9.2 Methodology
We want to simulate a situation in which the SoC designer knows the general
domain of circuits that will be implemented in reconfigurable logic, but does not
necessarily know the exact circuits. We accomplish this by taking the domains that we
already have and by removing one or more of the circuits in order to create reduced
domains.
These reduced domains are used to create domain-specific architectures
according to our tool flow. If the architecture created for the reduced domain is different
than the architecture for the full domain, then we reintroduce the removed circuit(s) and
determine what additional CPLD resources (if any) are required to implement the new
circuit.
This process was applied to every circuit in each of our five domains. Each circuit
was individually removed, and the reduced architecture was created. We also created
five new sub-domains by grouping very similarly sized circuits from the main domains,
and we applied this process to each circuit in these sub-domains as well. These ten
domains had a total of 92 circuits in them.
Each of the 92 circuits was removed from its domain, and 35 of the corresponding
reduced architectures were different than their full-domain architectures.
Using
145
knowledge of the 35 cases where removing a single circuit resulted in a different
architecture, we then created 14 more such cases by removing multiple circuits from the
domains.
In all, we created 49 reduced architectures that were different from the
architectures obtained by the full domains.
With these 49 interesting reduced architectures, we will be intelligently adding
resources to the architectures in order to determine what is required to support the
removed circuits. The basic question we wish to answer is this: given an architecture
augmentation strategy, how much of an area penalty must we tolerate in order to support
the additional circuits? We will analyze this information using graphs of the form shown
in Figure 91. In the figure, the x-axis displays the area requirement of a given strategy,
normalized to the reduced domain. The y-axis displays the number of domains that can
support their additional circuits for the specified area requirement. Results that are
toward the upper left of the graph are good, because many domains can be supported by
the strategy with a small area overhead. Results that are toward the lower right of the
graph are bad, because few domains are supported and the area penalty is high.
Strategy 1
Domains Supported
Strategy 2
Normalized Area
Figure 91. The basic graph we will use to examine our different CPLD augmentation strategies
We will also compare the different resource strategies according to the geometric
mean of their data points. Each strategy will have data points in the exact same y-
146
locations on the graphs, so their x-values will be normalized to a particular strategy, and
their means calculated and compared: this will give a numerical value that can be used
for comparisons. The graphical data can be difficult to compare at times, and the graphs
often do not include all the data points (in order to increase the visibility of the interesting
areas), so a numerical metric will be helpful.
9.2.1
Routing Failures
When a circuit is mapped such that it fails to route on an architecture, there are two
possible ways to get the circuit to route: we can spread the mapping out among additional
PLAs, or we can make the existing PLAs larger. Both of these strategies will eventually
allow a circuit to route, but they have very different effects on the architecture to which
we are mapping.
Several of our augmentation strategies increase the number of PLAs in our
architecture until the reintroduced circuit(s) fit on the architecture.
Under these
strategies, the PLAs are set to a specific size and cannot be augmented. If a circuit fails
to route under this augmentation strategy, therefore, the only option is to spread the
mapping out among more PLAs. We spread out the mapping by running PLAmap on the
circuit, but with smaller PLAs than our actual architecture will use. For example, if a
circuit failed to route on an architecture using 10-20-5 PLAs, we will then run the circuit
through PLAmap with a 9-20-5 architecture, acquire the mapping, and attempt to route it
on the 10-20-5 architecture. If it fails to route again, a mapping using 8-20-5 PLAs will
be acquired, and we will again attempt to route it on the 10-20-5 architecture. The next
attempt would use a 10-20-4 mapping, then a 9-20-4 mapping, then 8-20-4, then 7-20-5,
and so on, until the circuit successfully routes. This algorithm is shown in Figure 92,
including the method for deciding upon the next mapping to attempt.
After compiling the data for this section, we determined that we should have been
using the strategy of spreading out mappings for ALL of the cases where we see a routing
failure. Routing failures occurred in so few cases, however, that we decided not to retake
all the data with this routing-failure strategy implemented. Rather, we will provide
147
graphs that show the best possible performance that could have been achieved from
implementing this routing-failure strategy, and we will display that the conclusions drawn
from the figures are unaffected by this omission. Figure 94 is actually the only graph that
uses augmentation strategies in which the PLA count of the architecture is fixed, so it is
the only figure affected.
routeBySpreadingMapping()
{
input circuit;
input swPerc;
//the circuit
//the switch percentage
input in, pt, out;
in2, out2;
//base PLA size is in-pt-out
//reduced PLA variables for getting mappings
ratio = ceil(in/out) //the ratio of inputs to outputs, rounded up
s, t;
//integers used in the loop
//Loops and variables to control what we set the in2 and out2
//variables to be. We will then get a mapping for a in2-pt-out2
//architecture and route it on an in-pt-out architecture
for(i=1; i<in; i++) {
s = i-1;
t = -1;
for(j=0; j<(ratio*i); j++) {
if(t++ == ratio) {
s--;
t = 1;
}
in2 = in-j;
out2 = out-s;
//if it successfully routes at this mapping, we’re done
if(runPLAmapAndRoute(circuit, swPerc, in2, pt, out2, in,pt,out)) {
return {in2, pt, out2};
}
}
}
throwError(); //should always route at SOME mapping size
}
Figure 92. Pseudocode for spreading out the mapping of a circuit among additional PLAs in order to
achieve a legal route
148
Notice that we are only decreasing the input and output values of the mapping, not
the product-term value. This is because decreasing the input and output values is going
to have a greater effect on the routability of our mapping, allowing us to converge to a
routable solution more quickly. Our routing problem involves routing signals from PLA
outputs to interconnect tracks to PLA inputs, so if our mappings use fewer inputs or
outputs, it will decongest the routing in these regions. Decreasing the number of product
terms in a mapping might spread the mapping out among more PLAs, but it would do
little to decongest the routing resources at the PLA inputs and outputs, and would
therefore be less effective.
For all of the augmentation strategies which allow PLAs to increase in size, no
special intervention is used to facilitate routing. In these cases, if a mapping fits the
constraint of PLA count but fails to route, then it is considered a failure (just as if it had
not met the PLA count constraint). The algorithm will continue to increase the PLA size
until a corresponding mapping routes on the architecture.
9.3 Results
When mapping to reconfigurable architectures, providing sufficient routing resources
is necessary if one wishes to fully utilize the architecture’s logic elements.
If
insufficient routing resources are available, mappings either fail to succeed or they get
spread out so that they require more logic elements than inherently necessary. This is
true of our CPLD architectures, as providing insufficient switch density in the crossbars
will either make architectures unroutable or it will force the PLAs to be underutilized,
causing an increase in the number of PLAs required. This suggests that finding a good
crossbar switch density should be the first thing done in our architectures, as providing
sufficient crossbar connectivity will allow any increased logic resources to be utilized
efficiently.
Our architectures are initially given the minimal switch density that allows all the
circuits in a domain to map, but this might be insufficient for future circuits. We
therefore ran an exploration of how switch density affects the amount of area required to
149
map future circuits to our reduced architectures.
In this exploration, the reduced
architectures were given additional switches according to a multiplicative factor and
allowed to use as many extra PLAs as necessary in order to map the additional circuits.
The results of this exploration are shown in Table 28 and Figure 93, and the data
represents architectures with the base number of switches, base*1.05 switches, base*1.10
switches, base*1.20 switches, and base*1.50 switches.
The data shows that good results are obtained when either 0% or 5% extra switches
are added to the basic crossbar in the CPLD. Indeed, for any normalized area shown in
the graph, either the c=1.00 or the c=1.05 graph provides the most domains supported.
Also note that the c=1.05 graph always outperforms the c=1.10, c=1.20, and c=1.50
graphs, so there appears to be no benefit from adding more than 5% to the crossbar
switch density.
But which strategy is better, using the base crossbar switch density or adding 5%?
According to Table 28 it is somewhat of a wash. If a new circuit can be mapped using
0% additional switches, then an architecture with 5% additional switches will end up
requiring up to 5% more area than the architecture with no additional switches. If a new
circuit successfully maps to an architecture with 5% more switches but fails on an
architecture with no additional switches, however, then the mapping will have to be
spread out among additional PLAs in order to reduce the routing demands. In this case,
the area cost might be much more than 5%, as it depends on how many additional PLAs
are required when the mapping gets spread out. Adding 5% to the crossbar switch
density therefore provides better worst-case behavior than not adding any switches. This
is one reason why we have concluded that one should add 5% to the crossbar switch
density when trying to support unknown circuits.
150
Table 28. Results of attempting to support future circuits by adding switches to our crossbars and
allowing any number of PLAs in the architecture. Results are geometric mean
Switch Count
BASE
BASE * 1.05
BASE * 1.10
BASE * 1.20
BASE * 1.50
Mean Result
1.00
1.01
1.03
1.07
1.18
45
40
Domains Supported
35
30
25
20
15
10
5
0
1.00
Switches in Crossbar = c * base_pct.
Circuits use as many PLAs as needed.
c=1.00
c=1.05
c=1.10
c=1.20
c=1.50
2.00
3.00
Normalized Area
Figure 93. Results of attempting to support future circuits by adding switches to our crossbars and
allowing any number of PLAs in the architecture
Another reason is shown in Table 24 from the previous chapter. This table showed
that larger architectures required a higher switch density than smaller architectures, so it
makes sense that we should provide some additional switch density if we are going to be
making our architectures larger. For all future explorations in this section, therefore, we
will be adding 5% to the base switch density in the corresponding architectures.
Having dealt with the routing structure, we must now examine the logic resources.
We can augment the logic in our reduced architectures by adding PLAs, by adding inputs,
product terms, or outputs to our PLAs, or by adding all three of these variables to our
151
PLAs in either a multiplicative manner, c*(in-p-out), or in an additive manner, c+(in-ptout). In the strategies in which we increase the sizes of the PLAs, the architecture is not
permitted to use more PLAs than the base architecture. We performed each of these
experiments with our 49 interesting reduced architectures, and acquired the results shown
in Table 29 and Figure 94.
Table 29. Results of attempting to support future circuits by adding the specified logic resources. All
strategies use 5% more switches than the base reduced architecture. Results are geometric mean,
and failure rate details how many domains were not supported by a strategy
Strategy
#PLAs
#PLA inputs
#PLA pterms
#PLA outputs
c*(in-pt-out)
c+(in-pt-out)
Mean Result
1.00
1.05
1.02
1.02
1.16
1.24
Failure Rate
0%
51%
49%
49%
0%
0%
45
40
Domains Supported
35
30
25
Augmentation Strategies
20
15
10
5
0
1.00
Strategies use larger
PLAs, but cannot use
additional PLAs
2.00
#PLAs
#PLAinputs
#ProductTerms
#PLAoutputs
c*(in-pt-out)
c+(in-pt-out)
3.00
Normalized Area
Figure 94. Results of attempting to support future circuits by adding the specified logic resources.
All strategies use 5% more switches than the base reduced architecture
As the data shows, the most efficient strategy for supporting additional circuits is
simply to add more PLAs to the architecture. The multiplicative and additive strategies
152
are also capable of supporting all of the additional circuits, but they do not do it as
efficiently as the strategy of adding more PLAs. Of the multiplicative and additive
strategies, the multiplicative strategy appears to perform slightly better for most of the
points in the graph, and this is also shown in the table. The strategies in which we simply
add inputs, outputs, or product terms to the PLAs are insufficient to even support all the
additional circuits, as the logic resources end up lacking in the variables that don’t get
augmented and they are unable to support many of the circuits.
As discussed above, some of the augmentation strategies shown in Figure 94 do not
use a routing-failure recovery strategy. This includes all but the blue data (#PLAs) in
Figure 94. Table 30 and Figure 95 show the best possible results that could have been
achieved by these strategies had they been using the routing-failure recovery strategy
described above. As can be seen, the differences between Figure 94 and Figure 95 are
practically imperceptible, and the same analysis that we applied to Figure 94 can be
applied to Figure 95. The similarities between Table 29 and Table 30 also back up this
conclusion.
Table 30. The best case performance of the data in Table 29, assuming a routing-failure recovery
strategy had been used
Strategy
#PLAs
#PLA inputs
#PLA pterms
#PLA outputs
c*(in-pt-out)
c+(in-pt-out)
Mean Result
1.00
1.03
1.01
1.01
1.14
1.22
Failure Rate
0%
51%
47%
49%
0%
0%
153
45
40
Domains Supported
35
30
25
Additional Resources
20
15
10
5
Strategies use larger
PLAs, but cannot use
additional PLAs
0
1.00
2.00
#PLAs
#PLAinputs
#ProductTerms
#PLAoutputs
c*(in-pt-out)
c+(in-pt-out)
3.00
Normalized Area
Figure 95. The best case performance of the data in Figure 94, assuming a routing-failure recovery
strategy had been used
The strategies of adding PLAs and adding inputs/outputs/product terms to the PLAs
multiplicatively are both shown to perform reasonably well in Figure 94, so another idea
is to attempt a mixture of these two strategies. The idea here is to make the PLAs some
percent larger, and then to allow the implementation to use as many PLAs as it requires.
Table 31 and Figure 96 show the results of doing this with PLAs that are 0%, 10%, 20%,
50%, and 100% larger than the base size.
Table 31. Results of attempting to support future circuits by augmenting the PLA size and allowing
any number of PLAs. All strategies use 5% more switches than the base reduced architecture
PLA Size
BASE
BASE * 1.10
BASE * 1.20
BASE * 1.50
BASE * 2.00
Mean Result
1.00
1.10
1.23
1.79
2.79
154
50
45
Domains Supported
40
35
30
25
Can use any # of
c*(in-pt-out) PLAs.
20
c=1.0
c=1.1
c=1.2
c=1.5
c=2.0
15
10
5
0
1.00
2.00
3.00
4.00
5.00
Normalized Area
Figure 96. Results of attempting to support future circuits by augmenting the PLA size and allowing
any number of PLAs. All strategies use 5% more switches than the base reduced architecture
As the data displays, adding PLAs of the base size still appears to be our best
augmentation strategy. Making the PLAs 10% or 20% larger also provided reasonable
results, but adding any more than 20% is shown to be area-prohibitive. These results are
much worse than we expected, as we thought that a hybrid strategy would perform
comparably to the strategy of simply adding more PLAs of the base size.
Closer
examination of this particular hybrid strategy showed us that we had approached the
problem in the wrong way.
This hybrid strategies begins by augmenting the PLAs in the architecture by a fixed
percentage, and this has the obvious effect of making the architecture larger. Using
larger PLAs may allow future circuits to require fewer PLAs, but since we are only
adding resources (not removing), we cannot reduce the number of PLAs in the
architecture below the number in the base architecture. Because of this, the minimum
area achievable by this hybrid strategy is going to be larger than the strategy which does
155
not make the PLAs larger. This can be seen in Figure 96, as the lines are no longer
intercepting the x-axis at a normalized area of 1.00. The basic pitfall of this hybrid
strategy is that we are not adding resources incrementally: we are instead providing a
large initial boost to the resources in terms of PLA size, and then allowing incremental
changes from that point on (in terms of additional PLAs).
We thus developed a second hybrid strategy that is capable of adding resources
incrementally. In this new strategy, λ of the additional area resources are provided to
additional PLAs, while (1- λ) of the additional area resources are provided to larger PLAs
(using a multiplicative scaling factor), where 0 ≤ λ ≤ 1. Resources are slowly added, using
these ratios, until the removed circuit is supported by the architecture. Table 32 and
Figure 97 display the results of running this new hybrid strategy with λ values of 1.00,
0.75, 0.50, 0.25, and 0.00.
This new hybrid method is successful at adding resources in an incremental fashion,
as shown by the fact that the lines in Figure 97 are intersecting the x-axis at a normalized
area of 1.00. The strategies of giving 75% and 50% of the additional area resources
toward more PLAs are both shown to be relatively effective, but the data still
demonstrates that the most effective method of supporting future circuits is simply to add
additional PLAs of the base size.
Table 32. Results of using the new hybrid strategy. All strategies use 5% more switches than the
base reduced architecture, and can use as many PLAs as required
λ
1.00
0.75
0.50
0.25
0.00
Mean Result
1.00
1.05
1.05
1.17
1.16
156
45
40
Domains Supported
35
30
25
20
#PLAs = base_pla_count + (c * λ * base_pla_count)
Architecture = base_pla_arch + (c * (1-λ ) * base_pla_arch)
Increase c until circuit fits.
15
10
λ=1.00
λ = 1, putting all extra area toward more PLAs
λ = 0, putting all extra area toward PLA-size
5
λ=0.75
λ=0.50
λ=0.25
λ=0.00
0
1.00
2.00
3.00
4.00
5.00
Normalized Area
Figure 97. Results of using the new hybrid strategy. All strategies use 5% more switches than the
base reduced architecture, and can use as many PLAs as required
9.4 Conclusions
In this chapter we explored the concept of adding capacity to our domain-specific
CPLDs. Some SoC designs will require their reconfigurable logic to support circuits that
have not yet been specified, so we need to examine the best way to add resources to our
architectures such that we maximize the likelihood of future circuits fitting on the
architecture.
Our results showed that, in terms of routing resources, it is good to add 5% to the
switch density of the sparse crossbars used in the CPLD architectures. In terms of logic
resources, the most area-efficient method of supporting future circuits is simply to add
more PLAs of the same size found in the base architecture. This is consistent with the
strategy that is most commonly employed with reconfigurable devices, in which
157
additional capacity is provided by adding more of the resources that already exist in the
architecture.
158
10 Conclusions and Future Work
Reconfigurable logic fills a useful niche between the flexibility provided by a
processor and the performance provided by custom hardware. This usefulness extends to
the SoC realm, where reconfigurable logic can provide cost-free upgradeability,
conformity to different but similar protocols, coprocessing hardware, and uncommitted
testing resources. Additionally, the paradigm of IP reuse makes it easy to incorporate
reconfigurable logic into an SoC device, because it can be provided to the designer as a
pre-made IP core.
General reconfigurable logic suffers performance penalties due to its flexible nature,
as it must be capable of supporting a wide range of designs. A unique opportunity exists
when creating reconfigurable fabrics for SoC, because the designer will already know the
application domain that the device will be targeting. Using this information, a domainspecific reconfigurable fabric can be designed that will target the exact applications that it
will need to support on the SoC, providing improved performance over more general
fabrics.
The dilemma then becomes creating these domain-specific reconfigurable
fabrics in a short enough time that they can be useful to SoC designers. The Totem
project is our attempt to reduce the amount of effort and time that goes into the process of
creating domain-specific reconfigurable fabrics, thereby providing SoC designers with
efficient reconfigurable architectures without adversely affecting their design schedules.
10.1 Contributions
This dissertation presented processes for creating domain-specific product-termbased reconfigurable architectures for use in SoC devices. This included a complete flow
for creating domain-specific PLAs and PALs: a project that we call Totem-PLA. Also
included was a complete flow for creating both full- and sparse-crossbar based CPLD
159
architectures: a project termed Totem-CPLD.
In addition to providing methods for
creating these architectures, we have also provided guidelines as to how to augment our
CPLD architectures with additional resources in order to maximize the likelihood that
they will support future, unknown circuits.
In Chapter 6 we introduced a complete flow that can be used to create domainspecific PLA and PAL devices for use in SoC applications. By intelligently mapping
circuits to these devices using simulated annealing, up to 73% of the programmable
connections in the AND and OR-planes could be removed while still supporting the
circuits.
This led to delay improvements of 16% to 31% in the arrays, although
compaction was unable to improve upon the area of our automatically generated layouts.
Chapter 7 next introduced a complete flow that can be used to create domain-specific
CPLD architectures that are based on full crossbars. We presented several algorithms
that, given a domain of circuits as input, are capable of finding a PLA size that results in
a CPLD architecture that efficiently supports the given circuits. Of the algorithms, the
Run M Points algorithm with a second iteration was shown to provide the best results.
This algorithm was able to create domain-specific architectures that outperform
representative fixed CPLD architectures by 5.6x to 11.9x in terms of area-delay product.
Even the best fixed-architectures that we could identify still performed 1.8x to 2.5x worse
than our domain-specific architectures. This flow also included a Layout Generator that
creates a full VLSI layout of the specified CPLD architecture in the tsmc .18µ process.
One of the main drawbacks of CPLDs is that their interconnect structures grow
quadratically with respect to PLA count. In order to help alleviate these area concerns,
Chapter 8 introduced the concept of using sparse crossbars in our CPLD architectures.
By utilizing an existing sparse-crossbar generation tool and implementing a congestionbased router, we were able to create CPLD architectures based on sparse crossbars that
required only 37% of the area and 30% of the propagation delay of their full-crossbar
based counterparts. A smoothing algorithm was also introduced which allowed us to
distribute switches evenly throughout the sparse crossbars: this allowed us to create
layouts that were as compact as possible.
160
Finally, Chapter 9 addressed the question of how to add additional resources to a
sparse-crossbar based CPLD in order to maximize the likelihood that unknown circuits
will be supported by the architecture. Results showed that the sparse crossbars should be
augmented with 5% more switches than were required in the base architecture, and that
the best way to add logic to the architecture is to add more PLAs of the base size.
Taken as a whole, this work provides a framework for the creation of domainspecific product-term-based reconfigurable architectures for use in SoC devices. We
have introduced algorithms that effectively create PLA, PAL, and CPLD architectures, as
well as providing tools that create high-performance VLSI layouts from these
architecture specifications. We have also explored the question of adding capacity to
these CPLD architectures, and provided guidelines for which resources should be added
in order to maximize the likelihood of supporting future designs.
While our architecture generation tools have used practical methods and provided
quality results, the tools described in this dissertation are in no way meant to be
production quality. Rather, they are intended to provide a framework for the creation of
domain-specific architectures, particularly those that are based on product-term style
logic. The methods employed in this work can be seen as guidelines for how to undergo
the different processes involved in creating domain-specific architectures.
10.2 Conclusions and Future Work
The work on Totem-PLA was intended to give us insight into how we can tailor
PLAs to a specific application domain. The eventual goal was to apply this knowledge to
the creation of PLA-based CPLDs, allowing us to tailor both the high-level CPLD
architecture and the low-level PLA architecture to the target domain. While we were
able to provide some delay gains by depopulating the AND- and OR-planes of the PLA
and PAL devices, we determined that this would come at too high of a cost to flexibility.
Therefore, when creating domain-specific CPLD architectures, we were only able to
modify the PLAs according to their input, product term, and output sizes.
161
Attempts to compact our depopulated PLAs and PALs provided us with no area
gains. In hindsight, it is apparent that we approached this problem in the wrong manner.
PLAs and PALs are such regular structures that, even if you depopulate their arrays by
more than 50% (which we did), a compaction tool would not be expected to provide any
real benefits. We should have designed the PLAs and PALs with the intent of leveraging
the packing methods that we employed for the sparse crossbars in Chapter 8. The layouts
of the switches in the sparse crossbars are very similar to the layouts of the AND- and
OR-plane cells in the PLAs and PALs, and the exact same methods could have been
employed in order to pack the cells in these planes. The only additional consideration
would be the drivers, pull-up devices, and registers at the peripheries of the AND- and
OR-planes. These cells could have been designed and laid out with multiple possible
aspect ratios such that, after the dimensions of the AND- and OR-planes are determined,
it is just a matter of choosing the periphery cells with the proper aspect ratios. If any
future work on PLA or PAL array depopulation is undertaken, such a strategy should be
implemented.
When sizing the devices in our final layouts, we attempted to choose sizes that would
result in reasonable performance for a wide range of PLA, PAL, and CPLD architectures.
The basic idea was to trade a small amount of architecture performance for lower design
complexity. Unfortunately, the architectures we create can vary in size by more than
three orders of magnitude. Considering the wide variation we see in architecture size, it
is clear that the use of fixed device sizes must be producing significant penalties in our
delay performance. An obvious avenue of future work would be to provide devices with
multiple sizing options, such that the devices in the final layout are sized according to the
characteristics of the final architecture. While we have not performed an analysis of the
performance gains this would provide, our guess is that delay improvements on the order
of 10x may be achievable for larger architectures.
Another concept that we did not consider is power dissipation. The standard metric
that we used to evaluate our architectures was area-delay product, but we also looked at
the architectures that would be chosen when using simple area-driven or delay-driven
162
flows. An obvious avenue of future work would be to create a power model for our
architectures using a tool like Powermill, and to run our tool flow using cost functions
that integrate power into the equation. This would likely lead to architectures that
penalize PLAs for their product terms and outputs, since the number of power hungry
pseudo-nMOS gates in one of our PLAs equals the sum of the product term and output
counts.
It would also be desirable to create architectures that don’t use pseudo-nMOS gates
at all, since gates of this style tend to dissipate a large amount of static power. While
most commercial CPLDs still use pseudo-nMOS PLAs and PALs, Xilinx has developed a
low power CoolRunner CPLD family [26-27] that uses static-CMOS PLAs [56-57]. In
order to provide truly power-friendly CPLD architectures, we would need to develop a
completely new architecture based on static-CMOS gates rather than pseudo-nMOS
gates. This would require a very large design effort, including new layout units, layout
generation code, area models, delay models, and power models. The effort may be
worthwhile, however, as the increasing feasibility of SoC devices is likely to cause an
increase in their deployment in low power devices such as PDAs and cell phones in
upcoming years.
One design decision that had a negative impact was our choice to use an executable
version of PLAmap in our tool flow for creating domain-specific CPLDs. The first
problem was that PLAmap would sometimes fail to provide us with results. This not
only led to slightly suboptimal results for the data points where PLAmap failed, but it
also required a significant amount of user intervention in order to create the missing data.
Another problem with using an executable of PLAmap was that it allowed us very
little control of the algorithm itself. We were not able to obtain fine-grained control of
delay and area tradeoffs for the algorithms, or make any modifications to the mapping
algorithms that might be useful, such as providing heuristics that give us faster results at a
slight penalty to mapping quality. This would have been useful for the circuits that
typically required an hour or more for a single run of PLAmap.
163
The main reason that we are creating domain-specific architectures is that we want to
leverage the similarities that exist between circuits in a domain. While PLAmap is the
best academic technology-mapping algorithm available for our use, it is not particularly
well suited to creating domain-specific architectures. PLAmap’s algorithm simply tries
to obtain a minimum-depth mapping, and then uses heuristics to pack PLAs into each
other to minimize the area of a mapping. The domain-specific gains that we achieved
were likely due to fairly coarse-grained similarities that existed between circuits in a
domain, such as the primary input count, the primary output count, and the number of
levels of logic existing between registers. PLAmap is unable to look closely at the
structure of different circuits in order to find similarities that it can exploit, which is a
distinct drawback of the algorithm.
If any future work is performed on the creation of domain-specific CPLD
architectures, I believe that a new tech-mapping algorithm should be developed for use in
the system. This would allow us to have complete control over the algorithms in the
technology-mapper, as well as allowing us to implement new algorithms that are able to
identify and utilize similarities between different circuits.
The proposed tech-mapper would be able to look at multiple circuits and find regions
of similarities that can be mapped to similar PLA structures. This would allow us to
better leverage the similarities that exist between circuits in a domain. I also propose that
the tech-mapping algorithm should be allowed to use PLAs of varying size within the
CPLD architecture, as different similarities that are extracted from the circuits are likely
to want to map to differently sized PLAs. This might not provide area gains due to the
fact that the CPLD’s bounding box is determined by the largest PLAs in the architecture,
but it would provide performance gains due to reduced capacitance in the architectures.
When put into a tool flow, the proposed tech-mapper would first perform these domainspecific optimizations in order to extract similarities from the circuits, and would then use
a PLAmap-like algorithm in order to map the remaining logic to PLAs. I believe that
these modifications would result in CPLD architectures that more accurately represent
the domains that they support.
164
In terms of the bigger picture, we now need to determine the next direction in which
to take Totem. One aspect of CPLD architectures is that their interconnect structures
limit them to implementing relatively small circuits. Totem-CPLD can therefore be seen
as a method of creating relatively low capacity domain-specific reconfigurable
architectures, using relatively fine-grained functional units.
Earlier work in Totem
leveraged RaPiD, a 1-D architecture targeted at the signal-processing domain. TotemRaPiD can provide us with a method for creating reconfigurable architectures for
implementing coarse-grained datapaths, but it is inefficient at supporting any fine-grained
circuits. A gap still exists in the Totem family, as there is currently no method of
creating large and effective reconfigurable fabrics that tailor to small-to-medium-grained
applications.
I believe that the next forays into Totem should address this issue. Since 1-D
architectures seem to be rather limited in their scope (RaPiD) or scalability (CPLDs), this
would suggest the creation of a 2-D reconfigurable architecture, most likely of an islandstyle nature. The trend in commercial devices is clearly toward these 2-D reconfigurable
architectures, especially when considering devices with reasonably large capacity.
The difficulties involved with creating a domain-specific 2-D architecture might
outweigh the foreseeable gains, however. Tile-based reconfigurable architectures are
already available for SoC designers, and the companies that provide them have put a
large amount of time and money into creating efficient (though general) architectures and
high-quality layouts.
While domain-specific 2-D architectures would hypothetically
provide performance gains over these more general fabrics, it is unclear whether the
performance gained by tailoring to a domain would overcome the performance lost in
terms of architecture and layout quality.
Additionally, domain-specific optimizations will be more difficult to make in 2-D
architectures, because there are more architectural constraints. As an example, consider
the basic island style FPGA diagram shown on the left half of Figure 98.
The
architecture has horizontal and vertical patterns that are very regular, such that changing
the size of any single item in the architecture will have an effect on both entire row and
165
column in which the item resides. On the right side of Figure 98 we have made just one
of the logic blocks larger, and it has left us with a large amount unutilized space in the
horizontal and vertical directions (shaded).
Switch
Block
Conn.
Block
Switch
Block
Conn.
Block
Switch
Block
Switch
Block
Conn.
Block
Switch
Block
Conn.
Block
Switch
Block
Conn.
Block
Logic
Block
Conn.
Block
Logic
Block
Conn.
Block
Conn.
Block
Logic
Block
Conn.
Block
Logic
Block
Conn.
Block
Switch
Block
Conn.
Block
Switch
Block
Conn.
Block
Switch
Block
Switch
Block
Conn.
Block
Switch
Block
Conn.
Block
Switch
Block
Conn.
Block
Logic
Block
Conn.
Block
Logic
Block
Conn.
Block
Conn.
Block
Logic
Block
Conn.
Block
Logic
Block
Conn.
Block
Switch
Block
Conn.
Block
Switch
Block
Conn.
Block
Switch
Block
Switch
Block
Conn.
Block
Switch
Block
Conn.
Block
Switch
Block
Figure 98. On the left, a basic diagram of a 2-D island style FPGA. On the right, the effects of
changing a single piece of the architecture. Note the extra unutilized space in the column and row
that the larger logic block resides in (the shaded regions in the diagram)
Clearly, we are limited in the types of optimizations that could be made in such an
architecture. In order to retain compact layouts, the logic blocks would all need to have
footprints of similar size. Another restriction is that routing channels would have to be of
uniform size across the entire width or height of the architecture in order to retain
compact implementations.
These layout constraints will make it difficult for the
architecture generation process to make many of the optimizations that a designer might
desire.
Another consideration is that, since we are now competing closely with tile-based
reconfigurable IP solutions, we will require very high-quality layouts for these 2-D
domain-specific architectures. This basically rules out the use of standard cell methods,
as the performance penalties imposed by these methods would almost certainly be too
high. In order to leverage the high regularity of the 2-D structure, I believe that an
additive layout generation process must be developed which tiles efficient layouts of the
logic, switch, and connection blocks.
This will require either the creation of very
166
efficient circuit generators, or the pre-designing of highly optimized cells that can be tiled
into a full architecture. In either method, a large amount of design effort will need to go
into the generation of 2-D layouts.
Despite being highly constrained, however, interesting things can definitely be done
within the framework of a domain-specific 2-D architecture. Clustering in the logic
blocks would allow different logic implementation schemes, including different LUT
sizes, small PLA blocks, small ALUs, and any other small units that are deemed
appropriate. Routing channels can contain different numbers of tracks, and switch and
connection blocks can contain different connectivity.
The big question, though, will be whether a domain-specific 2-D architecture would
be able to compete with and beat current tile-based reconfigurable fabrics. Because of
the large amount of effort that Totem-2D will require, I think that a detailed analysis
should first be undertaken in order to determine the feasibility of such an endeavor. If an
analysis shows that Totem-2D can provide gains over other solutions that currently exist,
then I believe that it should be explored.
If Totem-2D turns out to be infeasible, however, another future option for Totem is
to revisit the work that was done with RaPiD-AES. RaPiD-AES was a RaPiD-style
architecture that introduced new logic units that were optimized to private-key encryption
[12]. Work on RaPiD-AES was halted when the domain-specific results provided by
RaPiD-AES were found to be significantly worse than Verilog implementations on a
standard Xilinx FPGA.
In a recent Totem paper [25], RaPiD-AES is hypothesized to have failed largely
because it didn’t follow the strategy of “flexible-first”. The idea is that reconfigurable
architectures should start with a flexible fabric and add fixed functionality only as it
proves beneficial.
RaPiD-AES didn’t follow this methodology, as it provided only
coarse-grained functional units, which were often underutilized. In dealing with the
creating of domain-specific PLAs and PALs, this dissertation has basically introduced
PLA and PAL generators that could be used to create flexible units for RaPiD-AES. By
167
introducing these flexible units, we could take another look at the practicality of RaPiDAES architectures, as well as investigating the merit of adding “flexible-first”.
168
References
[1]
C. Ebeling, D.C. Cronquist, and P. Franklin, “RaPiD – Reconfigurable Pipelined
Datapath.”, Lecture Notes in Computer Science 1142—Field-Programmable Logic:
Smart Applications, New Paradigms and Compilers, R.W. Hartenstein, M. Glesner,
Eds. Springer-Verlag, Berlin, Germany, pp. 126-135, 1996.
[2]
D. C. Cronquist, P. Franklin, C. Fisher, M. Figueroa, C. Ebeling, “Architecture
Design of Reconfigurable Pipelined Datapaths”, Twentieth Anniversary Conference
on Advanced Research in VLSI, 1999.
[3]
A. Abnous, J. Rabaey, “Ultra-low-power domain-specific multimedia processors.”,
VLSI Signal Processing, IX, IEEE Signal Processing Society, pp. 461-470, 1996.
[4]
S. Goldstein, H. Schmidt, M. Budiu, S. Cadambi, M. Moe, R. Taylor, “PipeRench: A
Reconfigurable Architecture and Compiler”, IEEE Computer, 33(4):70-77, April
2000.
[5]
Xilinx, Inc, “Xilinx: Products & Services: Silicon Solutions: Virtex-4 Overview”,
<http://www.xilinx.com/products/virtex4/overview.htm> (2005).
[6]
K. Compton, S. Hauck, “Totem: Custom Reconfigurable Array Generation”, IEEE
Symposium on FPGAs for Custom Computing Machines, 2001.
[7]
K. Compton, A. Sharma, S. Phillips, S. Hauck, “Flexible Routing Architecture
Generation for Domain-Specific Reconfigurable Subsystems”, International
Conference on Field Programmable Logic and Applications, pp. 59-68, 2002.
[8]
K. Compton, Architecture Generation of Customized Reconfigurable Hardware,
Ph.D. Thesis, Northwestern University, Dept. of ECE, 2003.
[9]
K. Compton, S. Hauck, “Track Placement: Orchestrating Routing Structures to
Maximize Routability”, International Conference on Field Programmable Logic and
Applications, 2003.
[10]
K. Compton, S. Hauck, “Flexibility Measurement of Domain-Specific Reconfigurable
Hardware”, ACM/SIGDA Symposium on Field-Programmable Gate Arrays, pp. 155161, 2004.
169
[11]
K. Compton, S. Hauck, "Automatic Design of Configurable ASICs”, submitted to
IEEE Transactions on VLSI Systems.
[12]
K. Eguro, RaPiD-AES: Developing an Encryption-Specific FPGA Architecture,
Master’s Thesis, University of Washington, Dept. of EE, 2002.
[13]
K. Eguro, S. Hauck, “Issues and Approaches to Coarse-Grain Reconfigurable
Architecture Development”, IEEE Symposium on Field-Programmable Custom
Computing Machines, pp. 111-120, 2003.
[14]
K. Eguro, S. Hauck, “Resource Allocation for Coarse Grain FPGA Development”, to
appear in IEEE Transactions on Computer-Aided Design of Integrated Circuits and
Systems, October, 2005.
[15]
M. Holland, S. Hauck, “Automatic Creation of Reconfigurable PALs/PLAs for SoC”,
International Conference on Field Programmable Logic and Applications, pp. 536545, 2004.
[16]
M. Holland, S. Hauck, “Automatic Creation of Domain-Specific Reconfigurable
CPLDs for SoC”, International Conference on Field Programmable Logic and
Applications, 2005.
[17]
S. Phillips, Automatic Layout of Domain-Specific Reconfigurable Subsystems for
System-on-a-Chip, M.S. Thesis, Northwestern University, Dept. of ECE, July 2001.
[18]
S. Phillips, S. Hauck, “Automatic Layout of Domain-Specific Reconfigurable
Subsystems for System-on-a-Chip”, ACM/SIGDA Symposium on FieldProgrammable Gate Arrays, pp. 165-173, 2002.
[19]
S. Phillips, Automating Layout of Reconfigurable Subsystems for Systems-on-a-Chip,
Ph.D. Thesis, University of Washington, Dept. of EE, 2004.
[20]
S. Phillips, A. Sharma, S. Hauck, “Automating the Layout of Reconfigurable
Subsystems Via Template Reduction”, International Conference on Field
Programmable Logic and Applications, pp. 857-861, 2004.
[21]
S. Phillips, S. Hauck, “Automating the Layout of Reconfigurable Subsystems Using
Circuit Generators”, IEEE Symposium on Field-Programmable Custom Computing
Machines, 2005.
[22]
A. Sharma, Development of a Place and Route Tool for the RaPiD Architecture, M.S.
Thesis, University of Washington, 2001.
[23]
A. Sharma, Place and Route Techniques for FPGA Architecture Advancement, Ph.D.
Thesis, University of Washington, Dept. of EE, 2005.
170
[24]
A. Sharma, C. Ebeling, S. Hauck, “PipeRoute: A Pipelining-Aware Router for
FPGAs”, ACM/SIGDA Symposium on Field-Programmable Gate Arrays, pp. 68-77,
2003.
[25]
S. Hauck, K. Compton, K. Eguro, M. Holland, S. Phillips, A. Sharma, “Totem:
Domain-Specific Reconfigurable Logic”, submitted to IEEE Transactions on VLSI
Systems.
[26]
Xilinx, Inc., CoolRunner XPLA3 CPLD: Preliminary Product Specification, January
6, 2003.
[27]
Xilinx, Inc., CoolRunner-II CPLD Family: Advance Product Specification, March 12,
2003.
[28]
Xilinx, Inc., XC9500XV Family High-Performance CPLD: Preliminary Product
Specification, June 24, 2002.
[29]
Altera Corporation, Configuration Elements: Data Sheet, January 1988.
[30]
D. Chen, J. Cong, M. Ercegovac, Z. Huang, “Performance-Driven Mapping for
CPLD Architectures”, ACM/SIGDA Symposium on Field-Programmable Gate
Arrays, 2001.
[31]
J.H. Anderson, S.D. Brown, “Technology Mapping for Large Complex PLDs”,
Proceedings of the 35th ACM/IEEE Design Automation Conference, pp. 698-703,
1998.
[32]
N. Kafafi, K. Bozman, S. Wilton, “Architectures and Algorithms for Synthesizable
Embedded Programmable Logic Cores”, ACM/SIGDA Symposium on FieldProgrammable Gate Arrays, 2003.
[33]
A. Yan, S. Wilton, “Product-Term Based Synthesizable Embedded Programmable
Logic Cores”, IEEE International Conference on Field-Programmable Technology,
pp. 162-169, 2003.
[34]
F. Mo, R. Brayton, “River PLAs: A Regular Circuit Structure”, Proceedings of the
39th ACM/IEEE Design Automation Conference, 2002.
[35]
Y. Han, L. McMurchie, C. Sechen, “A High Performance Programmable Logic Core
for SoC Applications”, 13th ACM International Symposium on Field-Programamable
Gate Arrays, 2005.
[36]
Actel Corporation, “Varicore”, <http://www.actel.com/varicore/products/index.html>
(2005).
171
[37]
Elixent, “Reconfigurable Compute/Processing Array
<http://www.elixent.com/products/array.htm> (2005).
–
the
D-Fabrix”,
[38]
Elixent,
“matsushita”,
<http://www.elixent.com/press_area/pressreleases/matsushita.htm> (April 6, 2005).
[39]
Xilinx, Inc., Virtex-II Pro and Virtex-II Pro X Platform FPGAs: Complete Data
Sheet: Product Specification, June 20, 2005.
[40]
Xilinx Inc., “Xilinx: Products & Services: Silicon Solutions: Virtex-4 FPGAs: DSP
Applications”, <http://www.xilinx.com/products/virtex4/overview/dsp.htm> (2005).
[41]
S. Khawam, T. Arslan, F. Westall, “Embedded Reconfigurable Array Targeting
Motion Estimation Applications”, 2003.
[42]
M. Abramovici, C. Stroud, M. Emmert, “Using Embedded FPGAs for SoC Yield
Improvement”, Proceedings of the 39th ACM/IEEE Design Automation Conference,
2002.
[43]
B. Quinton, S. Wilton, “Post-Silicon Debug Using Programmable Logic Cores”,
IEEE International Conference on Field-Programmable Technology, 2005.
[44]
R. K. Brayton, G. D. Hachtel, C. T. McMullen, A. L. Sangiovanni-Vincentelli, Logic
Minimization Algorithms for VLSI Synthesis, Boston, Kluwer Academic Publishers,
1984.
[45]
“1993
LGSynth
Benchmarks”,
<http://vlsicad.eecs.umich.edu/BK/Slots/cache/www.cbl.ncsu.edu/CBL_Docs/lgs93.h
tml> (March 25, 1997).
[46]
J. P. Uyemura, CMOS Logic Circuit Design, Boston, Kluwer Academic Publishers,
1999.
[47]
OpenCores.org, “OPENCORES.ORG”, <http://www.opencores.org/> (2004).
[48]
M.
Leeser,
“Variable
Precision
Floating
Point
Modules”,
<http://www.ece.neu.edu/groups/rpl/projects/floatingpoint/> (May 20, 2004).
[49]
National Institute of Standards and Technology, FIPS PUB 197, Advanced
Encryption Standard (AES), November 2001.
[50]
Asratian, Denley, Häggkvist, Bipartite Graphs and Their Applications, UK,
Cambridge University Press, 1998.
172
[51]
V. Betz, J. Rose, “VPR: A New Packing, Placement and Routing Tool for FPGA
Research”, International Workshop on Field Programmable Logic and Applications,
1997.
[52]
J. Kouloheris, A. El Gamal, “FPGA Performance vs. Cell Granularity”, Proceedings
of the Custom Integrated Circuits Conference, 1991.
[53]
G. Lemieux and D. Lewis, Design of Interconnection Networks for Programmable
Logic, Boston, Kluwer Academic Publishers, 2004.
[54]
A. El Gamal, L.A. Heinachandra, I. Shperling, V. K. Wei, “Using simulated
annealing to design good codes.”, IEEE Transactions on Information Theory,
33(1):116:123, January 1987.
[55]
L. McMurchie, C. Ebeling, "PathFinder: A Negotiation-Based Performance-Driven
Router for FPGAs", Proceedings of the 1995 ACM Third International Symposium on
Field-Programmable Gate Arrays, pp. 111-117, February 1995.
[56]
Xilinx,
Inc,
“Technology
Update
<http://www.xilinx.com/xcell/xl36/xl36_10.pdf>.
[57]
Xilinx,
Inc,
“Fast
Zero
Power
(FZP)
<http://www.xilinx.com/products/coolpld/wp119.pdf>, 2000.
-
CoolRunner”,
Technology”,
173
Appendix A: Kuhn/Munkres Algorithm
This Appendix details an algorithm by Kuhn and Munkres that can be used to map
the product terms of two circuits onto PLA and PAL arrays such that they require the
minimal number of programmable connections. This is done by rephrasing the problem
as a problem on a bipartite graph with weighted edges, and finding the best perfect
matching. The algorithm for finding the best perfect matching is taken from [50].
The process begins with the product terms of each circuit. If one of the circuits
contains fewer product terms than the other circuit, then it must be filled with empty
product terms in order to contain the same number of product terms as the second circuit.
This is shown in Figure 99.
circuit1
circuit2
010010110
101010010
010110000
100100011
011011101
101000000
110010001
011101011
000000000
000000000
added terms
Figure 99. If one of the circuits has fewer product terms, then it is filled with empty product terms in
order to contain the same number as the other circuit. In this figure the product terms use their
vector representations, as introduced in Chapter 8
Next, the value of all possible product term matchings must be determined. The
value of a product term matching is the number of array locations that do not need
programmable connections when the two product terms are mapped to the same location.
It is formulated in this fashion so that we have a maximization problem rather than a
minimization problem.
174
circuit1
circuit2
a:010010110
b:101010010
c:010110000
d:100100011
e:011011101
v:101000000
w:110010001
x:011101011
y:000000000
z:000000000
Weight Table
v wx y z
a 3 3 1 5 5
b 5 3 1 5 5
c 4 4 2 6 6
d 4 3 2 5 5
e 2 3 1 3 3
Figure 100. The matching values are calculated for each possible product term matching between
two circuits. The Weight Table displays the values for the matchings
The problem is now recast as a problem on a bipartite graph, G. The product terms
from circuit1 become vertices in the left partition (V1) of G, and the product terms from
circuit2 become vertices in the right partition (V2) of G. For each vertex u in V1, an edge
is created to each vertex v in V2 with a weight w(uv) equaling the value calculated for the
corresponding product-term matching. An example of this is shown in Figure 101. The
problem is now to find the perfect matching between V1 and V2 whose edges sum to a
maximum value.
circuit1
a:01001
b:10101
c:01011
circuit2
x:01110
y:11000
z:01001
Weight Table
x y z
a 1 2 3
b 0 1 1
c 1 1 2
1
a
2
3
0
b
1
x
y
1
1
c
1
2
z
Figure 101. Casting the problem into the problem of finding the maximal perfect matching on a
bipartite graph
175
We define a function f which obeys f(u) + f(v) ≥ w(uv) for each u ∈ V1 , v ∈ V2 , and
instantiate the function as follows:
f 0 ( x) =
if x ∈ V1
if x ∈ V2
max{w( xy ) : y ∈ N ( x)}
0
where N(x) is the neighborhood of x. Basically, for each vertex in V1, f is set to the value
of the maximum edge connected to the vertex. For each vertex in V2, f is set to 0. An
example of this is shown in Figure 102.
1
a
f(a)=3
2
3
0
b
f(b)=1
1
x
f(x)=0
y
f(y)=0
z
f(z)=0
1
1
c
f(c)=2
1
2
Figure 102. Example of initial values for the function f
We next create the spanning subgraph of G, called Gf, which contains the subset of
edges uv for which f(u)+f(v)=w(uv). Gf therefore contains all the vertices from G, but
only some of the edges. An example of this subgraph Gf is shown in Figure 103.
G
1
f(a)=3
2
3
0
f(b)=1
1
Gf
f(x)=0
3
1
1
1
f(c)=2
1
2
1
f(y)=0
f(z)=0
2
Figure 103. On the left, the graph G with the values of f for each vertex. On the right, the spanning
subgraph Gf that is created from G
176
The problem has now been set up, and the Kuhn/Munkres algorithm can be used find
the optimal assignment on the bipartite graph, which will give us the optimal product
term assignment. The pseudocode for the Kuhn/Munkres algorithm is shown in Figure
104.
KuhnMunkresAlgorithm()
{
•
Begin with the feasible labeling f = f0, the equality graph Gf, and
a maximum matching of Gf, called M0, which is initially empty.
Let
i = 0.
•
While Mi is not a perfect matching of Gf
o
(1) o
Let u be a free vertex in V1.
If
Let S = {u} and T = ∅.
NG f (S ) = T
then
Compute
df =
Update the function f to
f (x) =
min
x ∈ S, y ∉T
f ( x) − d f
f ( x) + d f
f ( x)
{ f ( x) + f ( y ) − w( xy )}
if x ∈ S ,
if x ∈ T ,
if otherwise,
and calculate the new Gf.
y ∈ NG f (S ) \ T .
o
Select a vertex
o
If y is saturated then add y to T, and the neighbor of y in
o
Else there is an augmenting path P in Gf [S ∪ T] joining u to
Mi to S.
y.
Goto (1).
Let Mi+1 = Mi∆E(P) and i=i+1.
•
End while
•
Output Mi, an optimal matching.
}
Figure 104. The Kuhn/Munkres algorithm for finding the optimal matching in a bipartite graph [50]
The algorithm runs by searching for augmenting paths relative to the current
matching. When new augmenting paths are not found, it alters the function f in order to
modify the graph Gf, which allows new augmenting paths to be found. For circuits with
177
n product terms, there can be at most n matchings in Mi. For each matching, the set T can
be increased up to n times, which causes an update to f which can take O(n2) steps. The
overall runtime of the algorithm is thus O(n4).
178
Appendix B: Layout Units
This Appendix presents the major layout units that are used to build our CPLD
architectures, including their schematic representations. For brevity’s sake, only layout
units that utilize silicon are shown: any layout units that are comprised purely of routing
resources (metal layers) are omitted from this appendix. Additionally, many layout units
come in both a standard and upside-down form: this appendix will only display their
standard forms.
Figure 105 displays the very corner of a CPLD that our tool might create. Included
in this diagram is a very small (2-4-2) PLA, along with a row of programmable switches
that would be part of the crossbar that switches signals into the PLA. The figure also
depicts the individual layout units that are tiled in order to create the CPLD structure.
Each of the individual units displayed in Figure 105 is shown in this Appendix, along
with a schematic representation of the unit.
Signals are switched from the CPLD interconnect to a PLA through a programmable
switch, shown in Figure 106. The programmable switch consists of a transistor whose
gate is controlled by an SRAM bit. The output signal of this programmable switch feeds
an inverter and buffer, shown in Figure 107. This unit provides the true and negated form
of a signal to the AND-plane in the PLA.
Each product term in the PLA AND-plane is a pseudo-nMOS gate. The pulldown
section of the pseudo-nMOS gate is created by the AND-plane cells, which consist of
pulldown transistors that are either connected or disconnected from ground according to
SRAM bits (Figure 108). The pullup transistor for the pseudo-nMOS gate is shown in
Figure 109. This signal is then restored/amplified by a buffer, shown in Figure 110.
The outputs of the PLA are created in the OR-plane, and they are also formed using
pseudo-nMOS gates. The OR-plane cells (Figure 111) contain the pulldown transistors
179
for the pseudo-nMOS gates, and the pullup transistor is shown in Figure 112. This signal
is then inverted and amplified using the cell in Figure 113: inversion is necessary due to
our NOR-NOR PLA implementation.
The output of the PLA then feeds a D-Flip-Flop (Figure 114), which is used to
provide registering for the signal.
A 2-to-1 multiplexor (Figure 115) then chooses
between the registered and unregistered PLA output signal, as determined by an SRAM
bit, shown in Figure 116. This signal is then connected to a specific wire in the CPLD
interconnect, as required by our complete network implementation.
Pullup Pullup Pullup Pullup
180
Pullup
Pullup
AND
Cell
AND
Cell
AND
Cell
AND
Cell
Inter-Plane
Buffer
OR
Cell
OR
Cell
AND
Cell
AND
Cell
AND
Cell
AND
Cell
Inter-Plane
Buffer
OR
Cell
OR
Cell
AND
Cell
AND
Cell
AND
Cell
AND
Cell
Inter-Plane
Buffer
OR
Cell
OR
Cell
AND
Cell
AND
Cell
AND
Cell
AND
Cell
Inter-Plane
Buffer
OR
Cell
OR
Cell
Input
Inverter
And
Buffer
Prog.
Switch
Prog.
Switch
Input
Inverter
And
Buffer
Prog.
Switch
Prog.
Switch
Output Output
Inverter Inverter
RAM
Bit
RAM
Bit
2 to 1
Mux
2 to 1
Mux
DFF
DFF
Figure 105. Top, layout of a PLA and programmable switches (part of the crossbar) from a CPLD
that our tool creates. Bottom, the main cells used in creating this part of the layout
181
Figure 106. Programmable switch from the CPLD crossbar
182
Figure 107. Inverter and buffer that feed the PLA's AND-plane
183
Figure 108. AND-plane connection, a pulldown transistor in serires with an SRAM controlled
transistor
184
Figure 109. Pullup transistor for the AND-plane
185
Figure 110. Buffer between the AND-plane and OR-plane, used for signal restoration
186
Figure 111.
transistor
OR-plane connection, a pulldown transistor in serires with an SRAM controlled
187
Figure 112. Pullup transistor for the OR-plane
188
Figure 113. Inverter appearing after the OR-plane, used for needed inversion and signal restoration
189
Figure 114. D-Flip-Flop used for optional registering of the PLA outputs
190
Figure 115. 2-to-1 multiplexor used for chosing the registered or unregistered PLA output
191
Figure 116. SRAM bit used for controlling the 2-to-1 multiplexor
192
Vita
Mark Holland was born in Seattle, Washington in September of 1977, and has called
the city home for all of his life. He earned a Bachelor of Science in Engineering from
Harvey Mudd College in 2000, and a Master of Science in Electrical Engineering from
the University of Washington in 2002. In 2005 he earned a Doctor of Philosophy in
Electrical Engineering from the University of Washington.