Document 10834699
advertisement

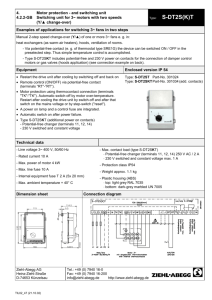
-=1
Using Shape Memory Alloy as Dampers: Design
Methodology
by
Siu Loong Leong
Submitted to the Department of Civil and Environmental
Engineering
in partial fulfillment of the requirements for the degree of
Master of Science
at the
MASSACHUSETTS INSTITUTE OF TECHNOLOGY
September 2005
@
Massachusetts Institute of Technology 2005. All rights reserved.
.. . . . . . . . . . . . . . . ..
... ...... .... ....
A uthor....................
Department of Civil and Environmental Engineering
August 12, 2005
/7
/7
/11)
Certified by ....... /........
Jerome J. Connor
Professor of Civil and Environmental Engineering
Thesis Supervisor
Iii'! I I
A ccepted by......................
...
A.....r.
A
J.
.
Andrew J. Whittle
Chairman, Department Committee on Graduate Students
MA SSACHUSETTS INSTTE
OF TECHNOLOGY
SEP 15 2005
1I
iE
M MAMI0
BARKER
2
Using Shape Memory Alloy as Dampers: Design
Methodology
by
Siu Loong Leong
Submitted to the Department of Civil and Environmental Engineering
on August 12, 2005, in partial fulfillment of the
requirements for the degree of
Master of Science
Abstract
Many shape memory alloy (SMA) material models have been proposed in the literature, but most are suited only to forward analysis and not to design.
This project proposes a generalized friction element, the lambda box, to model
the stress-strain curve of SMA during pseudoelasticity. Simulation is carried out to
study the dynamic response of such a system under harmonic loading. Three kinds
of systems were examined, in order of increasing complexity: the friction damper
system, the hysteretic damper system, and the hysteretic lambda damper system,
which dynamically is equivalent to the SMA damper system.
Using the simulation results, various asymptotes on the design space are identified, and design methodologies for the three systems are proposed. As the determination of the system parameters is decoupled from the actual damper design, a
design methodology to dimension and configure the SMA damper is then proposed,
for two kinds of problems, initial design and retrofit design.
Thesis Supervisor: Jerome J. Connor
Title: Professor of Civil and Environmental Engineering
3
4
Contents
1
2
1.1
The Problem
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
11
1.2
The V ision . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
12
1.3
T his Project . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
13
15
Review of Shape Memory Alloys
2.1
2.2
2.3
3
11
Introduction
. . . . . . . . . . . . . . . . . . . . . . . . .
16
2.1.1
Phase Transformations . . . . . . . . . . . . . . . . . . . . . .
16
2.1.2
Shape Memory Effect . . . . . . . . . . . . . . . . . . . . . . .
16
2.1.3
Pseudoelasticity . . . . . . . . . . . . . . . . . . . . . . . . . .
18
. . . . . . . . . . . . . . . . . . . . . . . . . . .
20
2.2.1
Tanaka, Liang and Rogers, and Brinson . . . . . . . . . . . . .
20
2.2.2
Phase Interaction Energy Function
. . . . . . . . . . . . . . .
20
2.2.3
Pseudoelasticity-only Models . . . . . . . . . . . . . . . . . . .
21
More on Pseudoelasticity . . . . . . . . . . . . . . . . . . . . . . . . .
21
Material Characteristics
Constitutive Models
23
Method
3.1
. . . . . . . . . . . . . . . . . . . . . .
23
. . . . . . . . . . . . . . . . . . . . . . . . . . .
23
General SMA Damper Model
3.1.1
Lambda box.
5
3.1.2
3.2
3.3
4
SMA Damper Model .......................
General SMA Damper System Model .....
25
..................
26
3.2.1
SMA Damper and Hysteretic Lambda Damper Systems . . . .
26
3.2.2
Boundary cases . . . . . . . . . . . . . . . . . . . . . . . . . .
27
M ethod
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
27
3.3.1
Dimensional Analysis . . . . . . . . . . . . . . . . . . . . . . .
28
3.3.2
Dimensionless System Parameters . . . . . . . . . . . . . . . .
29
On Friction Damper System
31
4.1
Scenario: Initial Displacement . . . . . . . . . . . . . . . . . . . . . .
32
4.1.1
Viscous Damper System . . . . . . . . . . . . . . . . . . . . .
32
4.1.2
Pure Friction Damper System . . . . . . . . . . . . . . . . . .
33
4.1.3
Friction Damper System . . . . . . . . . . . . . . . . . . . . .
34
4.1.4
Plastic Deformation . . . . . . . . . . . . . . . . . . . . . . . .
36
4.1.5
D esign space . . . . . . . . . . . . . . . . . . . . . . . . . . . .
36
Pure Friction Damper System under Harmonic Loading . . . . . . . .
39
4.2.1
R esults . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
39
Friction Damper System under Harmonic Loading . . . . . . . . . . .
41
4.3.1
Known Boundary . . . . . . . . . . . . . . . . . . . . . . . . .
41
4.3.2
R esults . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
42
Proposed Design Chart . . . . . . . . . . . . . . . . . . . . . . . . . .
43
4.4.1
A Value for r/* . . . . . . . . . . . . . . . . . . . . . . . . . . .
43
4.4.2
Approximate Resonance Equation . . . . . . . . . . . . . . . .
44
Design M ethod . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
45
4.5.1
Design Charts and Equation . . . . . . . . . . . . . . . . . . .
46
Linear M odels . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
46
4.2
4.3
4.4
4.5
4.6
6
4.7
4.6.1
1-P Collocation Linear Model . . . . . . . . . . . . . . . . . .
46
4.6.2
2-P Collocation Linear Model . . . . . . . . . . . . . . . . . .
48
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
48
Summary
51
5 On Hysteretic Damper System
5.1
External viscous damper . . . . . . . . . . . . . . . . . . . . . . . . .
52
5.2
Harmonic excitation
. . . . . . . . . . . . . . . . . . . . . . . . . . .
54
Condition for Yielding . . . . . . . . . . . . . . . . . . . . . .
54
. . . . . . . . . . . . . . . . . . . . . . . . . . . .
58
5.3.1
Bode Plots . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
58
5.3.2
Linear Models . . . . . . . . . . . . . . . . . . . . . . . . . . .
60
5.3.3
r/-Diagrams
. . . . . . . . . . . . . . . . . . . . . . . . . . . .
63
5.3.4
i-Diagrams . . . . . . . . . . . . . . . . . . . . . . . . . . . .
66
Design Procedure . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
67
5.4.1
Specific Solution Method . . . . . . . . . . . . . . . . . . . . .
67
5.4.2
Design Charts and Equation . . . . . . . . . . . . . . . . . . .
68
5.4.3
Viable Design Space Method . . . . . . . . . . . . . . . . . . .
69
5.4.4
Comparison of the Two Design Methods . . . . . . . . . . . .
70
5.4.5
Hybrid Design Schemes . . . . . . . . . . . . . . . . . . . . . .
71
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
72
5.2.1
5.3
5.4
5.5
Simulation Results
Summary
75
6 On Lambda Damper System
6.1
r Equivalent . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
76
6.2
Simulation Results . . . . . . . . . . . . . . . . . . . . . . . . . . . .
77
6.2.1
Bode Plots . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
77
6.2.2
Linear Models . . . . . . . . . . . . . . . . . . . . . . . . . . .
78
7
6.3
6.2.3
A-Diagram . . . . . . . . . . . . . .
78
6.2.4
Approximate Resonance Equation .
79
Design Method
6.3.1
6.4
7
80
Design Procedure . . . . . . . . . .
80
Summary
. . . . . . . . . . . . . . . . . .
82
On Hysteretic Lambda Damper System
83
7.1
Pre-simulation Analysis . . . . . . . . . . .
84
7.2
Simulation Results
. . . . . . . . . . . . .
86
7.2.1
Bode Plots . . . . . . . . . . . . . .
86
7.2.2
Missed Resonance . . . . . . . . . .
86
7.2.3
Approximate Resonance Equation .
88
7.2.4
Linear Models . . . . . . . . . . . .
89
7.2.5
TI-Diagram . . . . . . . . . . . . . .
90
7.3
7.4
8
. . . . . . . . . . . . . . .
Design Method
. . . . . . . . . . . . . . .
93
7.3.1
q-Diagrams
. . . . . . . . . . . . .
95
7.3.2
Procedure . . . . . . . . . . . . . .
96
Summary
. . . . . . . . . . . . . . . . . .
97
On SMA Damper System
99
8.1
On Shape Memory Alloy
100
8.2
Design Scenarios
102
8.3
. . . . .
8.2.1
SMA Dampers with Springs
102
8.2.2
Initial Design . . .
104
8.2.3
Retrofit Design
.
107
.
109
Damper Configurations
8
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
8.3.1
Bar Type
8.3.2
W ire Type . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
8.3.3
Prestressed Double Wire . . . . . . . . . . . . . . . . . . . . . 109
8.4
Material Parameters from Brinson's model . . . . . . . . . . . . . . . 111
8.5
Summ ary
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
Conclusion
115
10 Further Works
119
9
10.1 SMA embedded beam
. . . . . . . . . . . . . . . . . . . . . . . . . . 119
10.1.1 Moment-Curvature Relation . . . . . . . . . . . . . . . . . . . 119
10.1.2 Statically Determinate Structure
. . . . . . . . . . . . . . . . 120
10.1.3 Suggested Further Works . . . . . . . . . . . . . . . . . . . . . 122
127
A Simulation Details
A.1 Various Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . 127
A.2 Convergence criteria
A.2.1
. . . . . . . . . . . . . . . . . . . . . . . . . . . 128
Energy Balance . . . . . . . . . . . . . . . . . . . . . . . . . . 128
A.3 Newmark's Method . . . . . . . . . . . . . . . . . . . . . . . . . . . . 129
A.4 Equations of motion
. . . . . . . . . . . . . . . . . . . . . . . . . . . 130
A.4.1
Viscous Damper System . . . . . . . . . . . . . . . . . . . . . 130
A.4.2
Friction Damper System . . . . . . . . . . . . . . . . . . . . . 131
A.4.3
Hysteretic Damper System . . . . . . . . . . . . . . . . . . . . 132
A.4.4
Lambda Damper System . . . . . . . . . . . . . . . . . . . . . 135
A.4.5
Hysteretic Lambda Damper System . . . . . . . . . . . . . . . 137
9
10
Chapter 1
Introduction
Shape Memory Alloy (SMA), while initially named so due to its shape memory effect,
exhibits another interesting effect called pseudo-elasticity, which is a special form of
material damping. We wish to model the damping capacity of this material.
This project provides a framework to characterize a dynamical system which
involves SMA-type materials. Specifically, this project aims to
1. Develop a material model for SMA that is suitable for structural dynamics
design;
2. Develop a step-by-step design method for using SMA as structural dampers;
1.1
The Problem
The problem of engineering design can be stated succinctly as
Given the input and the desired output, or a set of restrictions on output
Find values, or ranges of values of system parameters
11
such that the restrictions are satisfied.
This is the reverse process of engineering analysis, which we state as
Given the complete set of system parameters
Find the desired output, or ranges of output
Typically there is a divergence between analysis models and design models. Take
the field of structural dynamics design as an example. The designer may have a number of different kinds of dampers to choose from (e.g. viscous, friction, hysteretic),
and each kind of damper would have a distinct material model, which would be employed in analysis, a forward process. But in the design phase the designer is very
likely to model all dampers as linear viscous dampers, as this damper model is
1. simple (simpler than others, and simpler to be "inverted"), and
2. well documented; in many cases step-by-step design method exists.
At the moment there is a big gap between analysis models and design models for
the SMA. As detailed in chapter 2, a number of material models are proposed in the
literature, but most of them are not simple enough to be inverted to give a design
model. This project attempts to fill this gap in the SMA system design models.
1.2
The Vision
The scale of structures for which structural mechanics is applicable spans several
orders of magnitude: from large scale civil structures at one end (103 m) down to
nano-structures at the other end (10-
m).
12
On the other hand, the smallest mechanical dampers around are at the scale of
centimeters. As these dampers contain moving parts, miniaturization is difficult.
Going further down the scale, piezoelectric materials has been successfully employed as dampers. Its small size allows it to be embedded in thin structures such
as skis [15].
It is envisioned that, as a passive device, SMA wires can fit in the same niche: a
structural damper, in sub-centimeter range, not involving moving parts. SMA would
have the advantage over piezoelectric materials that it is more robust, and requires
less physical care to handle.
1.3
This Project
U
F
-SMA
Figure 1-1: An SDOF SMA damper system.
We concentrate on the behavior of an SDOF system with an SMA element under
harmonic loading (Figure 1-1).
The properties of SMA are reviewed in Chapter 2. A new model for SMA is
13
proposed in Chapter 3, and Chapters 4-7 are devoted to investigating how the model
parameters determine the dynamic behavior of the system. Chapter 8 describes and
illustrates the design method developed.
14
Chapter 2
Review of Shape Memory Alloys
Shape memory alloys (SMAs) were initially named because they exhibit the shape
memory effect (SME): a piece of this alloy can memorize a certain shape. It can be
deformed permanently by force, but it can recover its memorized shape by heating,
and it can stay in its recovered shape when cooled.
The name stuck, even after people discovered other interesting properties of this
alloy. In particular, we could utilize a characteristic of this alloy's called pseudoelasticity, for its damping properties.
In this chapter, we first review some special properties of this material. We then
look at some commonly used constitutive models for the material. Lastly we suggest
a way to model the stress-strain curve for pseudoelasticity.
15
2.1
Material Characteristics
2.1.1
Phase Transformations
SMA's have two stable phases, depending on its temperature and stress state; martensite at low temperature and high stress, and austenite at high temperature and low
stress. Furthermore there are two variants to martensite, twinned and detwinned.
Hence phase transformation can be brought by a change in stress, or temperature,
or both; Figure 2-1 identifies the transformation fronts on the T-O- plane. Associated
with phase transformation is a transformation strain; this leads to the two most
important characteristics of SMA, the shape memory effect and pseudoelasticity.
There exists models which identify more phases, to model some subtler effects
(for example [11]).
2.1.2
Shape Memory Effect
The SME refers to a cycle of applying stress, removing stress, applying heat and
removing heat; see Figure 2-2.
Apply stress Twinned martensite is rearranged to detwinned martensite, leaving
a transformation strain.
Remove stress Elastic strain is recovered but the transformation strain stays. The
alloy remains to be detwinned martensite.
Apply heat The martensite present is transformed to austenite; the transformation
strain is recovered.
Remove heat The austenite is transformed back to twinned martensite.
16
(Tcrit
Superelasticity
Cycle
SME
Cycle
CM
cr
I
C
~CA
Two way SME Cycle
Af
Mf
Figure 2-1: Transformation fronts for austenite and the two martensites, on the a - T
plane. The dash-dotted lines show the SME and superelasticity cycle on this plane.
F7
Remove Stress
Apply Stress
detwinned
detwinned
martensite
martensite
~Cr
If
Icr
uTs
no change
twinned
martensite
4. Remove Hea
3. Apply Heat
detwinned
martensite
17
austenite
As
Af -M
twinned
martensite i
austenite
Ms
----------------
Figure 2-2: The transformations involved curing a cycle of shape memory effect.
At the end of the cycle the once-permanent plastic strain is removed; the alloy
has "memorized" its shape (or at least, its strain state).
Two Way Shape Memory Effect
In the one way SME, heating recovers the transformation strain, and the subsequent
cooling has no effect on the shape. In two way SME, the piece of alloy would take
two different shapes at two different temperatures, with no external force acting on
it. So instead of the applying stress, removing stress, applying heat and removing
heat cycle we have in one way SME, in two way SME we only have applying heat
and removing heat in the cycle. The simple explanation is that the residual stress in
the structure, together with the temperature change, would give the transformation
strain required for the shape change [6].
2.1.3
Pseudoelasticity
This is also called superelasticity. At temperatures higher than the austenite transition temperature, a cycle of applying stress, removing stress will transform the
austenite to detwinned martensite and then back. It exhibits one characteristic of
elasticity, namely no residual strain at the removal of external stress, hence the name
of the effect.
Energy is lost in form of heat during hysteresis, as austenite is transformed to
detwinned martensite and then back.
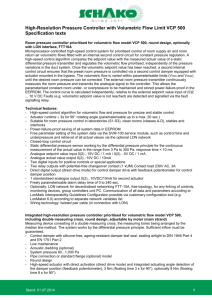
In practice the pseudoelastic hysteresis loop does not remain constant. Some
studied effects include:
Strain Rate Effect At a high strain rate, the transitional stress for both austenitemartensite and the reverse increases, and the net effect is that the hysteresis
18
500
450400 350300
U 250 200
150
100
50
01
0
0.02
0.04
0.06
0.08
E
Figure 2-3: Typical hysteresis loops in pseudoelasticity.
loop becomes smaller [4]. There's no generally accepted answer as to what
brings this increase in transitional stress; several models attributed the effect
to the heat generated during hysteresis. They start with a phenomenological
model e.g. Brinson's, and they include the strain rate effect by coupling the
quasi-static constitutive model with a heat conduction relation [12] [16].
Training Effect If you compare the hysteresis loop of a virgin piece of alloy and
that of a piece of alloy that has been deformed repeatedly, you can see that the
transition stress decreases after repeated deformation, and permanent deformation may be present at the removal of stress
[4].
This is termed the training
effect, and is due to the build up of residual stress and residual martensite after
each cycle of deformation [5] [1].
19
2.2
Constitutive Models
Most models describe stress-strain-temperature relationships, with an internal variable of m the volume fraction of martensite. There are two large families of constitutive models for SMA; most of the models in the literature is derived from either of
them.
2.2.1
Tanaka, Liang and Rogers, and Brinson
These are phenomenological models of the form
do- = DdE + OdT + Qdm
where m is a function of material properties, T and -. The 3 models
[14]
[8] [3] use
different functions for m = f(T, o-), and Brinson's model identifies the two variants
of martensite, detwinned and twinned, by m =
d
+
t.
The three models were invented in that order, and Brinson's model is generally held to be the most accurate [17]. These models assume uniform stress-straintemperature states in the alloy, and describe uniaxial quasi-static loadings only.
2.2.2
Phase Interaction Energy Function
[10] gives a good review. These models are based on microthermomechanics, and
the material behavior is wholly determined by two functions, the Helmholtz specific
free energy and the dissipation potential. In these models a particular form of dissipation potential function, known as the phase interaction energy function (PIEF),
is used. The PIEF is typically a polynomial function of the martensitic fraction and
temperature, constructed to fit the experimental data.
20
2.2.3
Pseudoelasticity-only Models
There exists a group of models which does not intend to "explain" the material, but
only to describe certainly aspects of the material. These models describes the stressstrain relationship of the alloy under pseudoelasticity, without making reference to
the phase changes experienced by the alloy.
Mechanism Based Models
One example is [9]. The model uses only structural element familiar to engineers,
including friction element and spring, linear and non-linear, to model the stress-strain
relationship of the alloy under pseudo-elasticity.
Stress-strain Relationship-only Models
One example is [13], which uses the concept of trigger line inside the hysteretic loop:
phase transformation occurs whenever the trigger line is crossed.
2.3
More on Pseudoelasticity
For the purpose of this project, pseudoelasticity is the only material characteristic
we need to know. Figure 2-4a shows pseudoelasticity as represented by the Brinson
model. We observe:
1. There is a clear stress limit at which the phase transformation begins; see
dotted lines.
2. The curve is fairly linear piece-wise.
21
Soo
500
450
450
.. . . . .. . .. . .. .. . .. .. .. .. . .. .
400
400
350
350
..
. . . . . . . . . . . . . . .
300
300
e
z 250
250
200
200
150
150
100
100
50
50
0
0
0
0.02
0.04
0.06
0.08
0
0.02
0.04
0.06
0.08
E
(b)
(a)
Figure 2-4: (a) The stress limit at which phase transformation starts is shown in
dotted lines. (b) The approximate piece-wise linear stress-strain is shown in solid
line.
Figure 2-4b shows the approximate stress-strain curve that will be used in this
project. The next chapter (3) describes a novel structural element which enables this
stress-strain relationship.
22
Chapter 3
Method
In this chapter we shall develop a new material model for the SMA, and fit it in an
SDOF system for dynamics analysis.
3.1
General SMA Damper Model
An SMA damper is idealized to have a piece-wise linear stress-strain curve (Figure
3-1a). We introduce a novel structural element called the A-box for this model.
3.1.1
Lambda box
A A-box (Figure 3-1b) is a generalization of a friction element. The force-displacement
relationship is summarized in the table below.
u>0
it>0 n<0
f
Af
u<0
-Af
23
-f
tp
F
F
f
A
Af
fT
F
f
A
Af
'U/
UP
(It + -Y)
-Af
(b)
(a)
Figure 3-1: (a) Model for an SMA damper with a piece-wise linear stress-strain curve.
(b) Stress-strain plot of a lambda box. Sub-loops are shown in dotted lines.
Remember pseudoelasticity was so named because it leaves no plastic strain at
the removal of stress. The A-box shows the same property: for A > 0, the A-box
admits no plastic strain at zero stress.
We can call A the return stroke parameter. One way to understand it is to
visualize it as the quality of friction; A = -1
gives a normal friction element, while
A = 1 presents no damping.
The relationship can be written as
F = f A (A, up, itp) =
f (A
+ (1 - A)H (upnii)) sgn(up)
24
where H(x) is the Heaviside step function:
1
if X > 1
H(x) =
0 otherwise
Sometimes the A is not written as an argument of the A function when A is
understood as a system parameter.
Then we write the stress-strain relationship
simply as
F
3.1.2
f A(up, ip)
SMA Damper Model
The SMA damper is modeled as a A-box with 2 springs; see Figure 3-2. This would
give the force-displacement relationship as defined earlier at Figure 7-1b.
01
k2
ki
Figure 3-2: Constructing a SMA damper with two springs and a A-box.
25
3.2
General SMA Damper System Model
The general SMA damper system model consists of a normal viscous damper system, of parameters m, c and k, plus an SMA damper represented by a A-damper,
defined by f and A, and a spring connection kh between the A-damper and the mass,
which represents a non-rigid connection between SMA damper and the mass plus
the tangent stiffness of the SMA before superelasticity.
3.2.1
SMA Damper and Hysteretic Lambda Damper Systems
a
k
/
7
/
/
/
/
/
/
/
/
/
/
/
/
/
k
k
C
m
c_V_
m
SM
F
m
F
F
A
A
f k~i
/(b)
(C)
(a)
Figure 3-3: (a) The SMA Damper (SMAD) System. (b) The black box SMA damper
replaced by the SMA Damper model. (c) The Hysteretic Lambda Damper (HLD)
System.
We replace the black box SMA Damper with our own SMA Damper model. After
consolidation of spring, we arrive at a simplified model. This model, having the same
static F-u relationship as the SMAD system, is called the Hysteretic Lambda Damper
(HLD) system.
26
This decouples two design processes, as we shall see later; the first step is to
shape the static F-u curve to control the system response, and the second step is to
construct a damper using SMA which gives the desired F-u relationship.
3.2.2
Boundary cases
Here if we set (kh, A)
=
(kh, -1),
we recover a model for a hysteretic damper (HD)
system, and if we set (kh, A) = (oc, -1),
we recover a model for a friction damper
(FD) system.
A third system model, which we would call the lambda damper system model,
is obtained by setting (kh, A)
=
(oc, A).
While being physically unrealizable, this
model does allow us to understand the behavior of the lambda damper better, and
serves as a stepping stone to the SMA damper system.
This suggest that we start with devising a design method for the FD system,
then extend the method to include HD system, then the LD system, and finally, the
HLD system.
System
Design variables
Friction damper
(f)
Hysteretic damper
(f,
Lambda damper
(f, A)
SMA-type damper
3.3
kh)
(f,kh, A)
Method
We aim to develop a rational design method for the SMA damper system under
harmonic loading. The main tools we have are dimensional analysis and computer
simulations.
27
In chapter 4 we shall develop the design method for the friction damper system;
chapter 5, the hysteretic damper system; chapter 6, the lambda damper system; and
chapter 7, the hysteretic lambda damper system. In chapter 8 we shall see how we
can construct an SMA damper to fit the HLD system designed.
Dimensional Analysis
3.3.1
This is a trivial form of dimensional analysis; we aim to identify the dimensionless system parameters. We shall employ the same non-dimensionalization scheme
throughout the whole report.
1
Taking the two dimensional governing equations ,
mi + ci + ku + kh(u - up)= F for
mu + ci + ka + fA(A, up, ii) =F
Af < sgn(up)kh(u- up) < f
otherwise
Applying the usual w, = k and c = 2mw, , with kh = -yk, we have
ii
2.
U+U+
Wk+
ii
2
2
+-U
F
y(U-UP)
f
+
U
+ -A(A, up,itp)
f
for
=
F
-
A
f
< sgn(up)Y(u - up) <
otherwise
Next we separate the magnitude and the profile of the forcing function, such that
'This is a mostly complete description of the motion; for a complete description, we need to
take into account the vertical portion of the Fx-up graph: up does not leave origin unless the force
acting on the damping exceeds a certain threshold, and up may get "locked" at zeros whenever it
changes sign. See § A.4.5 for details.
28
F(t) = F(t). We normalized a with ', with
u = fz.
Then we get
T
k
wn
2.
- Z + z + -Y(z - zP)
+
7A(A, zp,
z+z+z
-2
n
=
P
for
Aq < sgn(zp)-(z - zp) <rg
Wfl
n
)= P
otherwise
where q = 4.
For simulation purpose we would like to further reduce the number of
F
parameters in the governing equation, and by taking
d2 z
dz
d2Z+ 2 dr + z +
d 2z
-y(z- z ) = P
dz
dr + 2dr + z + A(A, z, zi) = P
2
for
T = wUt,
we have
Arj < sgn(zp)-y(z - zp) < r
otherwise
Now we specialize for the case of harmonic loading, with F = F sin(pwot). This
gives
d 2z
dT
2
d2 z
dr
2
dz
+ 2 dr + z + y(z - zp) = sin(pT)
dz
+ 2
A(A, z,
+ z+
) = sin(pT)
for
A1 < sgn(zp)-y(z - zp) < 7
otherwise
This is the equation used in most of the simulations. The main output we want
from this equation is H, the magnitude of the transfer function. In dimensional
terms, H relates a to
3.3.2
.
Dimensionless System Parameters
We identified 4 system parameters:
29
System Parameter
System Parameter
Significance
Significance
Amount of viscous damping present.
Level of friction damping; with respect to the applied
force.
-y
Rigidity of the connection to the friction element; with
respect to the system stiffness. y
=
oc represents a rigid
connection; -y = 0 none.
A
The return stroke parameter, as defined in section 3.1.1.
Here we identify again the boundary cases which reduces the HLD system to
certain simpler and sometimes more familiar systems:
The HLD System reduces to...
Viscous Damper (VD) System
Friction Damper (FD) System
I
when. ..
when...
Y = 0 or q = 0
oc and A = -1
Hysteretic Damper (HD) System
A= -1
Extra Stiffness (ES) System
71 = 00
Lambda Damper (FD) System
-Y = 00
30
Chapter 4
On Friction Damper System
/
/
/
/
/
/
/
/
/
/
/
/
/
/
/
/
/
/
/
/
/
/
/
/
/
/
/
/
/
/
7
a
7;
k
fF
m
F
f
k:
a
X
( a) U
--f
(b)
Figure 4-1: (a) An SDOF Friction Damper (FD) System. (b) Its static stress-strain
curve.
A friction damper (FD) system (Figure 4-la) consists of a viscous damper (VD)
system plus a friction damper. Its equation of motion is
31
mni+c'+ ku+fsgn(n)
d2z
dT
dz
dz
dT
dT
F
-
+26-+z±rsgn(- )=F
2
In this chapter we aim to develop a design methodology for an FD system under
harmonic loading. As a warm up we first look at another design scenario, on the
decay of initial displacement.
4.1
Scenario: Initial Displacement
Take a specific example. We are given an SDOF system, with an initial displacement of uO, and we want to determine the damper properties such that the initial
displacement would decay to 6 uo = 0.01uo by N = 10 cycles of free vibration.
4.1.1
Viscous Damper System
The decay profile of a VD system is described by
UN
e
VT
C 27rN
Hence to satisfy the decay requirement we require
27rN = ln(6)
-
V1
which implies (
-2
0.0733; see Figure 4-2a.
32
C
1
1
0.8
0.8
0.6
0.6
0.4
0.4
0.2
0.2
0
:3C
0
-0.2
-0.2
-0.4
-0.4
-0.6
-0.6
-0.8
-0.8
-1
)
2
4
6
8
N, number of cycles
10
-1
12
.
0
2
(a)
.
-
4
6
8
N, number of cycles
10
12
(b)
Figure 4-2: (a) Free vibration response of a VD system, satisfying the requirement
that initial disturbance decay to 1% in 10 natural periods. (b) That of an FD system.
4.1.2
Pure Friction Damper System
The governing equation of the system is
mii + ku + f sgn(t) = 0
We follow the non-dimensionalization scheme as detailed in § 3.3.1. The greatest
internal force experienced by the system, F
force F. z is then defined by z = -,
=
kumax
=
ku 0 , is chosen as the reference
and the equation in dimensionless form is
d 2z
da 2 + z + rosgn() = 0
and zo is, be definition, always 1. We label r/ with a subscript i as this r/ is non33
dimensionalized by an internal measure of force.
The requirement that the initial displacement uO decays from uO to 6uO then
translates to that z decays from 1 to 6, by N = 10 cycles of free vibration.
The free vibration amplitude of a fractionally damped system decays by a constant amount of Az = 217 every half cycle. To satisfy the requirement that z decays
from I to 6 = 0.01, by N = 10 cycles of free vibration,
1 - 4N7i
7 = 6
1-6
4N
In this case we require qj = 0.02475. See Figure 4-2b.
4.1.3
Friction Damper System
Most systems inherently contain some damping; this can be modeled by an additional
viscous damper. The governing equation is
d2 z
dT
2Z+
2
dz
d
+ z+ 7i sgn()
= 0
Looking at any particular half cycle within which
ri sgn(%) stays constant too.
stays constant, the term
We can then solve the equation of motion, and the
magnitudes of two successive peaks in a half-cycle are related by
zn =
where a = e
(zn_-
--
7)a -
1
7r. So the magnitude of the free vibration after N cycles (2N half
34
cycles) is
2
ZN = az2N 0 ~- 1(a
=
a2NZ0 _ TI(a
=
a 2 N zo - r(a+)
a2N-1 + 2a2 N-2 + - - -
N +
2
1)(a
2
N-1 + a
2a + 1)
+a+±1)
N-2
Hence r, is given by
1
1+
2N
-
_
(4.2)
a 1 - a2N
3
r=
2.5
0.02
0
0.01
;= 0.04
= 0.073294
2
0.015
1
.5
0.01
1
0.005
0
0.51
0
0.04
0.02
-
-2
0.06
0
2
4
6
8
N, number of cycles
10
12
(b)
(a)
Figure 4-3: (a) Possible solutions in the ( , r7j) space for 6 = 0.01, N = 10. (b)
Different decay profiles all passes through (N, 6).
For example, if the system has 1% inherent viscous damping, we only need a
friction damper of riT
=
0.0176 instead of rTi = 0.02475.
Figure 4-3a shows the
possible ( , r/) pairs that satisfies the requirements that u = 0.01u 0 by N = 10
35
cycles.
4.1.4
Plastic Deformation
A system with qi can admit a plastic deformation of -i
< zp <
mi.
Taking the last
example, we may add one more constraint about the residual plastic deformation,
that zUpJ
buo. This implies JzpJ < b, which implies qi < b.
This imposes a restriction on the amount of friction damping we can use. If we
take b = J = 0.01, we can see from figure 4-3a that we need to have at least 0.025 of
viscous damping, and no more than Ti = b = 0.01 friction damping.
4.1.5
Design space
The design space is ( , rf). The admissible design space is bounded by the the curve
which proportions the
and qi, and the straight line which defines the maximum
allowable plastic strain. The curve, in the above example, was defined by two parameters, N and J.
Instead of defining N and 6 explicitly, one usual practice is just to say we want a
certain amount of equivalent viscous damping
'c.
One way to define the equivalence
is to force the two systems to have the same 'half-life' i.e. the time it takes for an
initial disturbance to decay to half of its original value is to be the same.
After fixing a value for 6, from the decay profile of the viscously-damped system,
we have
a2N
_> N =
2w
36
G
,
To define the equivalence by half-life we take &= 0.5. Then
In 2
27r
The equivalent purely frictionally damped system would have, from Eq. (4.1)
7r
4 In 2
2-
For systems with both viscous and friction damping, the expression for 77 is still
given by Eq. (4.2). See Figure 4-4a for a series of iso-
e(
, q), equivalence as defined
by half life.
=
0.05
1
=0.01
0.1
__
=
S=0.01
S=0.02
0.8
=0.05
- =0.03
0. 1
0.08 [
r= 0
0.9
0.02
0.7 F
(=0.04
=0.05
0.6
0.06
N
0.5
0.4
0.04
0.3
N\-
0.2
0.02
.1
0.
0
0.02
0.04
0.06
0.08
0
0.1
0
2
4
6
8
10
12
N, number of cycles
(b)
(a)
Figure 4-4: (a) Interaction diagram between and 77j, equivalence defined by same
half-life. (b) Decay profile of different systems with e = 0.05.
One can also define equivalence as having the same initial decay rate. This is the
37
same as setting 6 = 1, and the equivalent purely frictionally damped system would
have
See Figure 4-5a for a series of iso- ,(,
(4.3)
l-_2
2 V
Ti), equivalence as defined by initial decay
rate.
e = 0.05
1
0.15
-
0.01
(=
-
0.9
0.02
_=
0
0.01
0.05
0.8
S=0.02
0.1
0.7
S=0.04
0.1
0.03
(=0.05
0.6
N
.
0.5
0.4
0.05
0.3
0.2
0.1
0
0
0
0.02
0.04
0.06
0.08
0.1
0
2
2
8
6
4
4
6
8
N, number of cycles
10
12
(b)
(a)
Figure 4-5: (a) Interaction diagram between and mi for initial disturbance, equivalence defined by same initial decay rate. (b) Decay profile of different systems with
G = 0.05.
38
4.2
Pure Friction Damper System under Harmonic
Loading
The equation of motion is
mii + ci + ku + f sgn(it)
=
F sin wt
d2 z
dz
2
dT + 2-dz+ z +1 sgn(*) = sinpT
Here
=.
We restate the definition of r7z as
f
divided by the greatest internal
force experienced by the system at steady state. If the magnitude if the transfer
function is H, then r/ and 77i are related by
/i =
T/
H
(4.4)
We identify the design space as (p, , rI).
4.2.1
Results
We explore a restricted design space of (p,
=
0, 7). Key observations are
1. Unlike viscous damping, friction damping decreases the response H, in the
pseudo-static range, where H, = 1 - r.
2. From the Bode plots we see that at high frequency (p > 1), the response H
decreases two decades for each decade increase in p, with a downward shift.
3. If we now define an equivalent damping ratio
e
the resonance response, we'll find that HVD(p,
39
= (e(r) by equating the Hres,
=
e)
< HFD(p,
= 0,1),
10
5
4.5
~11=
. =
Ti
3.5
=
=
0.7
0.74
0.78
10
Ti
0.7
-- =
0.74
0.78
0.82
Y =
10
0.86
-i= 0.9
2.5
-] =
-- =
Y= 0.82
3
0
- -= 0.3
r = 0.3
4
I
2
0
-ii=
=
M
0.9
2
10
1
10
1.5
-1
0.5
0
0
0.5
1
1.5
P
2
2.5
103
10
3
-2
10
P
10
10
10
(b)
(a)
Figure 4-6: (a) Transfer function H, =
. (b) In Bode plot.
because the friction damper is active at both the pseudo-static range and the
high frequency range. Hence it is safe (conservative) if we design only with
G
= de(T). This also leads to the 1-Parameter linear model in section 4.6.1.
4. Figure 4-7a shows
e
as a function of q. We note that the friction damper
provides virtually no damping for q < 0.8, but provides very, very high damping
for r > 0.8. This critical level of r,, which we would call
in the later chapters.
40
i*.
will feature heavily
0 =0.01
0.7
=
0.5.
e = 0.02
=0.05
0.6~
0.6.1
0.4
0.1
0.5-
~0.3
0.4
0.3
0.2
-
0.2
0.1
0.1
0
0
0.2
0.4
0.6
0-0
0
0.8
(a)
0.02
0.04
0
0.06
0.08
0.1
(b)
Figure 4-7: (a) Equivalent viscous damping, (e given r. Note the big jump at r- ~ 0.8.
(b) The draft of a contour plot for ',. The circled points are known. The simulation
aims to discover the shape of the iso- e's joining the known end points.
4.3
Friction Damper System under Harmonic Loading
We explore the design space of (p, , r7).
4.3.1
Known Boundary
As this simulation is built on an earlier one with a restricted design space, it's a good
exercise to figure out what we already know before going into the simulation.
See Figure 4-7b, a contour plot of e in the design space of ( , r/). We know the
values on the
axis, which are simply
( r/ = 0) =
. The values on the r/ axis are
given by simulation 1, which can be read off Figure 4-7a as e( = 0, r/). These are
41
the end points of the iso- e's; the purpose of this simulation is to find out exactly
the shapes of these iso-
4.3.2
e's.
Results
0.9
0.2
=0.01
0.18-
0.8
-=0.02
.=0.05
0.16-
0.7
=0. 1
0.14-
0.6
0.12
ni
/-
0,.
0.5
0.1[
0.4
0.08
0.3
0.06
0.04
0.2
0.02
0.1
0
0.2
0.6
0.4
0-
0
-
0
0.8
0.02
0-70-
0.06
0.04
0.08
0.1
TI
(a)
(b)
Figure 4-8: (a) True iso- e profile on the design space of ((, j). The assumed profile
T(I). Dotted lines show the estimation
is shown in dotted lines. (b) Plots of true
given by the assumed iso-ce profile.
As pointed out in Simulation 1, because the friction damper is active at both
the pseudo-static range and the high frequency range, it is safe (conservative) if we
design only with the resonance response. By
a grid of values for
rs
~
2
we get
e over
and ij.
Results are summarized in Figures 4-8a and 4-8b.
1. We see that the iso-ce profiles on the ((, r) plane are remarkably straight; see
42
Figure 4-8b. The iso- ,'s seem to converge at a single point in the rj axis. We
call the value of r1 at that point 7*.
2. Next we approximate the iso-
e's
with straight lines joining the if* point to
respective values of . See again Figure 4-8b; the approximate iso- c's are
donated by dotted lines.
3. Figure 4-8a is another representation of the same set of data. This time the
dotted line donates the
e
values predicted by the aforementioned straight line
approximation. In both cases we see a close fit.
4.4
Proposed Design Chart
We propose design curves as in Figure 4-9a, namely, given the end points of the
iso-
c's
as specified in the last section, we simply join the end points linearly; see
Figure 4-8b.
4.4.1
A Value for
r*
Next we plot the same graph on ( , 7i) plane instead of
(
, ri) plane, 1 and ri related
by Eq. (4.4). We see that this design graph looks amazingly similar to the design
graph for design for initial disturbance (equivalence by initial decay rate); compare
with Figure 4-5a. Assuming the two graphs are in some ways related,
1. We quote from Eq (4.3), 71 = Le
4
for small c.
2r.
2. From Eq. (4.4),
7
43
0.7
o
~=0.01
0
0.01
o
= 0.02
0.15
0.01
S0.02
o=0.05.
0.6
0.1
-
0.05
-
0.1
0.1
0.5
0.4
-
0.30.05
0.2
0.1
0
n
0
0.02
0.04
0.06
0.08
0.1
0.02
0
0.04
0.06
0.08
0.1
(b)
(a)
Figure 4-9: (a) Assumed iso- e profile on the design space of ((, }). (b) The same
plane instead of ( , ) plane. Compare with Figure 4-5a, which
curves on ( , mq)
looks almost the same.
Eliminating 71i, we get
2
H
- -0.7854
4
We take this, !, as the value for T*.
4.4.2
Approximate Resonance Equation
As we have assumed a specific profile for the iso-
e's
we can write down the equation
. By simple geometry,
for the assumed profile relating e, 71 and
44
r7* -1r/
17
T1 *
(4.5)
1 - 7
We can express the same relation in terms of Hres instead:
Hres
1
1
2 e
(1 - 17
r/*]
This is of the form Hres( , 17) = f ()g(r7).
= Hres()
(I -
(4.6)
We uncoupled the contribution from
the VD and the FD. Similar expressions will come up when we analyze the more
complex models.
4.5
Design Method
The design algorithm is as follows:
1. Specify Hres; translate to e ~r
1;
2. Construct the iso-se line as in Figure 4-9a.
3. Choose a specific ((, 17) pair:
(a) If the system has some inherent viscous damping, use that as
and read
17 of the chart correspondingly.
(b) If a specific level of pseudo-static response H, is desired, we can fix r7 at
,q = 1 - H, and vary
accordingly.
45
4.5.1
Design Charts and Equation
Only one design chart is involved: the FD resonance design chart (Figure 4-9a),
which can be generated by the user.with the FD approximate resonance equation
(Eq (4.6)). Later we'll see some design methods which involves design charts derived
from simulation data; those are the non-user-generated type of design charts. In
general, the inclusion of non-user-generatable charts lowers the usability (especially
portability) of the design method.
4.6
Linear Models
For the ease of use, for familiarity, or for interfacing with other programs, people
would want an equivalent linear model. Our approach to equivalence is by matching
the Bode plot of the system interested and that of another system containing only
linear elements.
4.6.1
1-P Collocation Linear Model
By matching the peak of the two Bode plots, we come up with the notion of ,. This
is roughly a collocation scheme by requiring Hr
= H es.
We call this model the
1-Point (1-P) Collocation Linear Model, and the only parameter to be determined,
is given by
-1H1 1 H2
1
2e
2res
'Not strictly collocation as we are not equating the p at resonance; but given Pres ~1 for low
damping, this is near enough.
46
=
0.02,
rj =
0.4
5
1I
--
2
H friction
4
100
H 2P
-X
10
2
1
10
0
0
1
2
4=002,
10-2
3
100
102
100
102
100
102
=0.6
5
10
4
100
3
2
/
0-2
-
1
0
0
10
1
2
0.02,
j =
-4
2
3
0.8
10-
102
1
0.8
100
0.6
-r
10
0.4
0.2
10-4
0
0
2
1
P
3
10-2
P
Figure 4-10: Linear and Bode plots of ( , r/) = (0.02, 0.4), (0.02, 0.6) and (0.02, 0.8)
in solid lines, and those of the two linear4 eguivalent models in dotted lines.
4.6.2
2-P Collocation Linear Model
But one characteristic of a friction system is its ability to control the response in
the pseudo-static range. The second step to develop the linear model is to require
Hs'p = HFD; we are collocating 2 points instead of 1.
We construct the transfer
function H 2p as
e (1
2P
TI)
-
'
H2P -I
P(1
-
p 2)2 + ( 2 pe2P)2
Physically the 2-P model is equivalent to altering the system by
m
m
2P
k
2P
= C
-C2P
The approximation works well for light damping, up to around '
=
0.7; see
Figure 4-10. It also shifts the high frequency asymptote downwards, which fits the
high frequency response better.
4.7
Summary
The response of a Friction Damper (FD) system under harmonic loading on the
Bode plot is very much like that of a Viscous Damper (VD) system, but with some
difference:
1. The shape of the Bode plots are very similar.
2. Resonance for an FD system occurs near p
48
=
1
3. The FD system response curve starts with the static deflection H, = 1
-
instead of 1.
4. The high frequency asymptote of the FD response curve is shifted downwards.
The magnitude of the resonance response can be accurately predicted by the
proposed approximate resonance equation for FD system.
A non-cyclic design method for the FD system is proposed, taking as input Hres
and H8 , and giving
and r/ as output.
Linear models that approximate the FD system Bode plots are proposed. In
particular, the model gives
1. The correct resonance position and magnitude;
2. The correct static asymptote;
3. The correct high frequency asymptote.
49
50
Chapter 5
On Hysteretic Damper System
U
k
F
m
F
f
UL
//l
k(1.:I 7y)
-f
(a)
(b)
Figure 5-1: (a) An SDOF Hysteretic Damper (HD) System. (b) Its static stressstrain curve.
A hysteretic damper (HD) system (Figure 5-la) consists of a viscous damper
51
(VD) system plus a hysteretic damper. Its equation of motion is
+ cu + ku +
m
kh(u
-
up)= F
mi + cit + ku + f sgn(ii) = F
for |kh(U-up) < f
otherwise
or in dimensionless terms,
d2z
2
dz
F
z,)
2
dz
dz
d z
2
+ z +q rsgn( y) = F
2
+
dr
dT
+ z + y(z
+2
for 1y(z
-zp)l
< r
-
otherwise
In this chapter we aim to develop a design methodology for an HD system under
harmonic loading. As a warm up we first look at another seemingly similar system,
the external viscous damper system.
5.1
/
External viscous damper
7]A
U
k
F
m
C
c
k
Figure 5-2: An SDOF External Viscous Damper (EVD) System.
This model (see Figure 5-2)can be used when we connect an external viscous
52
damper to a system. We define -y =
If the damper-system connection is rigid,
kg.
then -y = oc and the model reverts to a normal viscous damper system.
Under harmonic excitation, the transfer function Hj F/k is given by
HuIF/k
where p and
1
1
_
p2 +
2 p-i
are the tuning ratio and damping ratio with respect to the viscous
damper model i.e. when -y = 00.
S= 0.01
S= 0.05
102
1
10 2
S=
0.1
100
I
I
100
100
.y= A.5
10-2
10-2
100
10
10
y~oo
A
10-
p
0
1
10
10
10
100
601
10
p
p
12,
10
40
5-
/
I:
T
I.
8
_r
I.
20
jl
00.9
.
1
p
1.1
4
6
/
4'
0.9
1
p
1.1
3
0.9
1
p
1.1
Figure 5-3: Transfer functions for an external viscous damper system. Top row shows
the shape of the Bode plot, bottom row zooms in the resonance region.
Figure 5-3 shows the simulation results: we want to know how H deviates from
that of the case of a rigidly attached viscous damper, as
53
increases and y decreases.
increases and -y decreases, but H essentially
We see that deviation increases as
keeps its shape on the Bode plot. Even at quite a high value of
= 0.1 and low
value of -y = 0.5, the highest deviation, which is at resonance, is still only 12.8%; at
= 1ythe deviation is down to 2.0%.
This shows that, as long as the connection is reasonably stiff (for example -y > 1),
we really need not bother with the external damper model and can just use the
simpler viscous damper model. But this is not the case for a hysteretic damper;
hence the rest of this chapter.
Harmonic excitation
5.2
We explore the design space of (p, , TI, 0y).
As this simulation is built on an earlier one with a restricted design space, it's a
good exercise to figure out what we already know before going into the simulation.
5.2.1
Condition for Yielding
The friction element will not be active if -y(z - zp) < q. For pseudo-static loading,
, or equivalently, 'y <
the system will not yield if 7 >
.
Generally, the friction element will not be active if 7H <
T1,
where H is the
dimensionless transfer function connecting u and : . In these cases the system reverts
to the Extra Stiffness (ES) System.
Known Boundary
1. At one end, if we take y
=
oc, we obtain the friction damper (FD) system
model, discussed in § 4.
54
U
k
c
F
Figure 5-4: Under certain conditions the friction element will never be active; the
system reverts to the Extra Stiffness (ES) System.
2. At the other end, when we take y = 0, we obtain the viscous damper (VD)
system model. rT is immaterial; the response is defined solely by H = H(p, ).
3. The pseudo-static case is worth examining as it is a special case for the next
regime we'd discuss.
The condition for yielding is yku
f,
=
or in dimensionless terms, yz
=
r7.
When the damper yields, from static equilibrium,
ku+f= F
-
z = H = 1 -r
remembering that z is more or less designed to be H, definition of z being z =
55
'.
F/k
And when the damper is not yielding, again by simple static equilibrium,
ku+ yku = F
*
1
H=
There exists a value -y, which is the switching point between the two behavior.
At -y, both equations above would be true, so
1
H =-
=
-F
is =
1
4. Moving on from the pseudo-static case. For any combinations of (p, , TI), we
y < -y, in which the hysteretic damper does not
can always find the regime 0
yield. We state again the non-yielding condition as
H<HNY
-'1
(5.1)
When the damper is not yielding the system behaves like an ES system. Hence
the dynamic response can be found by
HVD
(
p
/ +_YI
1
V/1+y
k(1 +-y)
where HVD is the transfer function for a conventional viscous damper system:
HVD(p,
(1
and the
-
2
2
p2 ) 2 + ( p )
factors account for the change in natural frequency of the system
due to the addition of the extra stiffness. Normalizing with j (not with k(1F))
56
we obtain the ES transfer function:
HES
= HVD
(l
p
,
+
_
)
lv 1+
1
1
± )
_
y
y(1 + ~y
-
(5.2)
p 2 ) 2 + (2pg)2
Given (p, , r)), the intersection of curve (5.1) and (5.2) gives 'y8 . Equating the
two equations,
1
(1 + _y - p 2 ) 2 +
(1 -
1
(5.3)
(2 p ) 2
+2(1 - p 2)> + (1 - p2 ) 2
2
+I
2,
+ (2pE)2 = 0
The positive root of the above quadratic equation gives -y,.
il =0.7,
(=0.01,
p=
0
p = 0.8
p = 1.2
1G
4
0.91
3.5
2.5f
0.8
3
2
0.7
2.5
M:
0.6
1.M
0.5
0.4
(
-
2
)
1
10
10
10
102
1.5
1
10
Y
0
10
2
0.5
10
[
cit~
2
10
10
Figure 5-5: A hysteretic damper system forms a continuum between the viscous
damper and the friction damper, whose response are shown by the circles at the two
ends of the charts. -y., where the non-yielding response curve and the yield limit
intersects, is marked by a cross.
Figure 5-5 shows some typical H--y plots. For the non-yielding values of 7:
(a) For p < 1, increasing -y increases the natural frequency of the system, making the forcing frequency to be further away from resonance; increasing y
decreases H.
57
(b) The reverse is true for p > 1, and increasing -y increases H, up to the yield
limit HNY
-
When we set up the problem like this the task looks less daunting. Instead of
having to juggle all 4 parameters of (p, , T1, -y) at the same time, it seems that we
can first deal with the friction damper parameters (p, , 17), then correct the result
for (-y).
Simulation Results
5.3
We are interested in H, the dimensionless transfer function relating fi and
shall examine its relationship with the 4 system parameters, p,
5.3.1
. We
, 71 and y.
Bode Plots
We make the following observations:
1. Static deflection is given by
if
I- T >
(5.4)
Hs =
otherwise
In the first case the damper yields, second doesn't. This gives the static asymptote on the Bode plot.
2. Resonance occurs near p = 1.
58
3. Given 1 and rj, with Eq. (5.3), we can estimate the range of p for which the
hysteretic damper is non-yielding:
p4 + (4
2
2(1 + 7Y))p
-
2
+ ((1
±1)2
(5.5)
02
(a) If 1 - 7 < 1, the above equation should give two non-negative solutions
pi and
and the response H of the system at p < pi and p > P2 is given
P2,
by Eq. (5.2). See Figure 5-6a, left.
(b) If 1 -
> -, there is only one real solution
P2,
and the response H of the
system at p > P2 is given by Eq. (5.2). See Figure 5-6b, right.
=
0.01,
= 0.6, y = 1
S= 0.01, rj =0.6,
-
Hny
H
10
- Hny
H
100
yield limit
--- H 1
- -
1
-
II
-H -
-
- yield limit
-/-
-
H2
2P
/
'r
y =2
/
-
1:
100
10
/\
- - --
\
\
\
\
-
10
10
10
10
0
10
10
10
P
10
(b)
(a)
Figure 5-6: (a) Bode plots for a typical HD system, with 2 non-yielding regions. (b)
With 1 non-yielding region.
4. At high frequency, H < 1 - rj and the HD system reverts to an ES system.
59
Hence the high frequency asymptote of the HD system is the same as that
of the ES system (which is also the same as that of the VD system). To be
specific, the on bode plot, the high frequency asymptote passes (1, 1) and has
a slop of -2.
5.3.2
Linear Models
1-P Collocation Linear Model
Again we take (e
=
2
Hr.
Specifically, we are collocating the peak at
(p = 1, Hres).
1. The fitted cure is higher than the actual response curve in most area except
in the vicinity of p = V1 -+I-,
the resonance frequency of the ES system if the
damper never yields; again see Figure 3.
2. This can be viewed as a slight widening of the resonance region.
3. The effect is not significant as
(a) For a small value of -y, the effect would be reflected in Hres of the transfer
function;
(b) For y > 1, the second resonance occurs in a region where H < 1.
This model gives the right peak response (at the right frequency) and the right
high frequency asymptote, but not the right static asymptote; see Figure 5-7a.
60
2-P Collocation Linear Model
The next step is to collocate the static response. The static deflection is given by
Eq. 5.4. The 2-P transfer function is then given by
&2
= GeHs
H2P
({1 -
Hes
p ) + (2 pt2P) 2
2 2
For the third time, see Figure 3. This model gives the right peak response (at
the right frequency) and the right static asymptote, but not the right high frequency
asymptote; see Figure 5-7a.
3-P Collocation Linear Model
When -y > 1 we see some interesting "asymptote jumping" for the region p >
P2.
For 1 < p < P2, the H function tries to follow the response curve for a FD system,
but it has to jump to the non-yielding response curve
p > P2. Given that -y > 1,
P2
HES
1
,\/(J+_yp2)2+(2p )2
for
would also acquire a high value and the phenomenon
will probably not happen in the interested range of p.
If for some reason you want to model this part of the response curve, we can
add a second order phase-lead compensator (same as 2 first order ones in series) to
the 2-P model. The aim is to translate the high frequency asymptote of the 2-P
equivalent model up such that it coincides with that of the 1-P model. The transfer
function would then take the form
H1P= H2P
1+ p2
H 2
1HsP2
H
(1 _22
P2)
61
1+ p
2
+ (2p&2)2 1 +Hsp2
S=0.01,
2
10
i
= 0.6,
y
=100
H
yield
10
).
- -H,
-,T"_.
limit
H
-3H
10
10
......... comp.ensato.r
1-P
0-2
10
2-P
(1, H
10
-4
10 -5
10-2
10
10
10
10
(b)
(a)
Figure 5-7: (a) Asymptotes of the 3 models in Bode plot. Adding the phase lead
compensator to the 2-P model shifts the high frequency asymptote to the right. (b)
Notice the close fit in the high frequency region, at the expanse of a less accurately
modeled peak.
The peak response offshoots a bit', but its high frequency response is very similar
to that of the HD system, apart from the 'hump' at the second resonance region.
A warning: while the 1-P and 2-P models both represents some physically realizable systems, the phase lead compensator in the 3-P model cannot be realized by
any passive structural device. We are essentially just playing around with asymptote
on the Bode plot, without worrying about the physical implications.
'Specifically, it offshoots by a factor of
'2P
-2
H.
e
2
+
1Hp2I=1
_IH
Perfectionists 2 can set
to correct for the effect of the phase lead compensator on resonance.
62
3P =
5.3.3
rI-Diagrams
When we specify ( , TI) and plot Hres against rj, we have an 1-diagram; see Figure 5-8.
We can identify 2 salient points and 2 asymptotes on the 71-diagram:
0.05, y = 2
=
10
9
8
7
=L0
0,
II,
Tidis
+
1ES
O
Topt
TI-
-
6
I
-~
X
5
-2
-4
4
3
-
-
2
1
0
0
2
4
6
10
8
12
T1
Figure 5-8: A typical 1-diagram. See main text for descriptions of each regime. The
two asymptotes are shown in dotted lines.
1. At q = 0, the friction element is always active but provides no damping, and
the system reverts to a VD system. Then
2. We identify
TIES,
Hres
=
HF(().
the minimum friction level at which the friction element is
never active, even at resonance.
63
On one hand we have the non-yielding limit, HNY = ". On the other hand,
Hres for the ES system is given by
1
HES _
Equating the two equations gives
17ES =
3. For n >
nES,
Hres stays constant. The friction element is never active, and
behaves as if a rigid connection. The system reverts to an ES system. We call
this region the ES plateau.
4. For 17 <
TES,
the system yields during resonance.
tems with r7 smaller than but near to
respective non-yielding limit of
TIES,
It turns out that for sys-
their Hres follows quite closely their
. We take this H = 1 as the non-yielding
asymptote. The asymptote represents the non-yielding limit of the system; for
any values of H under the line, the system does not yield.
5. For low values of q, the system behaves like an FD system, and Hres approaches
the H e . This is the FD asymptote.
As 71 increases, the actual HD response curve dissociates itself from the FD
asymptote. We define
17dis
as follows: For 71 <
1dis,
the HD system behaves like
an FD system at resonance. In practice we also need to define a tolerance level
for 77dis, due to numerical uncertainty. Then
17dis
is a function only of (, 1 and
the tolerance level.
6. We identify a minimum value for Hres in the region between the two asymptotes.
64
0.9
0.8
- -
- = 0.01
=002
0.05
0.7 -
0.1
0.6 0.5 0.4 -
0.3
0.2
-
0.1
-
0
10
10
10
10
Y
Figure 5-9:
77dis
as a function of ( and 71.
We call the value of 77 at which this happens
ryopt,
and the corresponding Hes
value Hres opt. Both qopt and Hres opt are functions of
c
and -y only.
The 77-diagram raises one interesting point. Typically the VD approximation for
an HD, by energy balance, is given by
4Ff
[-i
Exact notation is not important, but it implies that the damping is linear to the
friction force level. This is true only in the FD-asymptotic region; once past this
regime, the formula is invalid. The key is to understand that raising 'q the friction
level brings out two effects:
1. The damping force is increased when the damping yields.
2. The actual yield time ratio, defined as the duration of time the damper yields
65
2.5
45
= 0.01
40
=
S=0.0"
C= .0E2~
-
35
0.01
- =0.02
2
=
0.05
30
1.5
25
I'
20
1
15
10
0.5
5
0
10
- - -----''
-2
'
10
10
- -
0
10
10
-2
100
10~
10
Y
Y
(a)
(b)
Figure 5-10: (a) Hres opt as a function of ( and -y. (b) The corresponding %lpt,again
as a function of
and '.
in a loading period divided by the loading period, decreases.
In the FD asymptotic regime, the first effect dominates, and in the ES asymptotic
regime, the second effect dominates. %0pt can be considered as the switching point.
5.3.4
'-Diagrams
We plot the resonance response
Hres
bounded by two values; at y = 0, Hres
of the HD systems against 7. H,
=
Hv(
must be
Tsy
, Hres = Hj.
), and at
The actual HD response curve stays at the FD response level for high values of -Y,
and dissociate from the FD curve at a certain lower value of -y which we'd call
The significance of -ydis is this: given an HD system, for -y >
like an FD system; and for -y < -ydis, the system does not.
66
'Ydis,
-ydis.
the system behaves
Given numerical uncertainty we define
with a tolerance level: for example
'Ydis
with a tolerance level of 5%, Hres of the HD system at -ydis would be 5% higher than
that of the FD system at -y = oc. See Figure 5-11a.
11
=
0.4,
,
=
0.01
44
8
Hres
42
---
H
40
.
(y=oo)
=
r(1
sol)Hres
- - - -
6
38
(
0.05
0 .1
5
36
cn
= 0.01
=0.02
7
LO
34
32
4
3
30
2
28-
1
26
24-2
10
10
-1
0
10
Y
10
1
10
0
2
(a)
0
0.2
0.4
0.6
0.8
1
(b)
Figure 5-11: (a) A -- diagram that gives ydis. (b) 'ydis as a function of , 71 and
tolerance. Graph is truncated as those ( ,y) triplets lead to high damping.
Theoretically -ydis and
T/is
form a function-inverse pair. In practice the values
would be a bit off due to the way the tolerance level is applied.
5.4
5.4.1
Design Procedure
Specific Solution Method
We propose the Specific Solution Method, which first treats HD systems as approximations to FD systems. That means, we design for an FD for the system, then
67
check if we can supply -y
> ydis.
If that proves impossible, we would design with the
maximum -y that can be supplied, and look up a value for Tept using design charts.
Here we assume the design constraints are Hres, Hs and Ymax, the maximum level
of -y that can be provided.
The design procedure is:
1. Given Hres and H, desired, follow the FD system design method and fix design
values of 77 and
.
A quick recap on the FD design method:
(a) Given inherent viscous damping
, determine 71 according to the approxi-
mate resonance relation; or
(b) Given Hs, determine
T,
then determine
according to the approximate
resonance relation.
2. Given Tj and
, look up the value for -ydis. This is the minimum value for -y.
3. If -ymax < ydis, we cannot use the FD approximation. We look up Hes opt (, 7max)
5.4.2
(a) If
Hres opt(6, 7max) < Hres, we use n = 7ept.
(b) If
Hres opt((, 7Ymax) > Hres,
there is no solution.
Design Charts and Equation
The FD design chart can be generated by the user.
Design charts for
}dis(
, 7), Hres opt(
,
-y) and
data and are not generated by users.
68
77pt(
, -y) are derived from simulation
5.4.3
Viable Design Space Method
The importance of this chapter is that we provided a framework to characterize the
HD system. The design method proposed above is just one of the many ways to get
a design decision. For example, we may be interested in identifying a viable design
space in instead of coming up with a single set of values for the system parameters.
We can do this with the help of the q-diagram.
1 )
2He7
Hres
/
/
/
/
/
/
lin
12-line
r
decreasing (
/
/
/
/
/
/
/
/
/
/
/
decreasing 7
1
'711
'(
'(7
)
T1(
(a)
0
,-2-inn
r/-ine
ThI
(7*
(b)
'(72
Figure 5-12: (a) As and -y decreases, the range of viable rq shrinks from the thin
horizontal line to the thick line. (b) Given 1 on the left axis and -y1 on the right
-y axis, T1 and 72 can be read off the chart.
See Figure 5-12a; once we specify
space for q/, with ql < r/ <
'r2.
Hres,
In particular,
69
and -y, we can bound the viable design
determines only the lower bound for
T,
and
'y
determines only the upper bound, where
,i = (1 - 2 Hres)7 *
Hres7
q2=
Decreasing
or 'y decreases the viable range of q; see again Figure 5-12a. We can
express this relation on a plot with
ij
as the x-axis and
and -y as a double y-axes; see
Figure 5-12b. If a static deflection limit H, is present, we can add another constraint
to the plot by requiring y >Tj, = 1 - H. To construct the viable 'q diagram,
1. Mark the x-axis for 77, the left y-axis for
2. Join (
and the right y-axis for -Y.
= 2 1, ) and (rj*, 0). This is the 71-line.
3. Construct a straight line, starting from the origin, with a slope of
respect to the 'y-axis. This is the
with
' 2 -line.
4. Construct a vertical straight line at n,
5.4.4
1
1 - H,. This is the q,-line.
Comparison of the Two Design Methods
The Specific Solution Method in
@5.4.1
can be seen as a special case of this Viable
Design Space Method: we always choose the lowest value for T1.
The rest of the
steps in the Specific Solution Method serves to confirm that the solution is indeed
admissible.
1. The Viable Design Space Method can be used when knowing the design space
is useful. For example, it can be used to input or tighten the solution space in
a optimization.
70
2. The Viable Design Space Method uses only design equations, and knowledge
of simulation data is not needed.
3. The Viable Design Space Method appeals more to the engineering "gut feeling":
you can see graphically different system parameters interact.
4. While any design space outside the Viable Design Space is inviable, not all
solutions inside the space is admissible. The asymptotes are, after all, just
asymptotes; while the Specific Solution Method uses simulation data to accurately gauge how far the true response is from the asymptote.
5.4.5
Hybrid Design Schemes
We can incorporate some simulation data into the Viable Design Space Method, to
refine the and tighten the solution range. For example, to simulate the first steps
of the Specific Solution Method, which uses -yis( , 71), we can put the -ydis curve on
the q design diagram; see Figure 5-13. The following procedure, which in spirit is
identical to the Specific Solution Method, is used:
1. Given
Hres
and maybe Hs, using the FD design method, determine
and
?.
This value for q will be 1.
2. Given
1, the 'Ydis(
-
1, 77) curve can be constructed.
3. Given 11, the corresponding -ydis value can be read of the curve.
4. The Specific Solution is then (
of the graph, for example the
1,
11, g i,). Additional information can be read
T1
2 value.
71
1
2He
7Ydis(
i)-line
?1 -line
/
r72 -line
............ .. d is
Figure 5-13: A hybrid design scheme that incorporates simulation data; in this case
Ndis(
5.5
, T) is used.
Summary
The response of a Hysteretic Damper (HD) system under harmonic loading on the
Bode plot is very much like that of a Viscous Damper (VD) system, but with some
difference:
1. Resonance for an HD system occurs near p
1
2. Static deflection is not 1 but is given by
1-7yif
1-
>L
Hs =Y
otherwise
3. It has the same high frequency asymptote as that of the VD system.
In terms of resonance response, we can identify 4 regimes:
72
1. For low 7,the HD system behaves like an FD system. This is the FD asymptotic
regime, and the resonance response can be predicted using the FD approximate
resonance equation.
2. At 77 ~ -opt, we have the minimum resonance response, holding all other parameters constant.
3. At higher values for 1, the resonance response follows closely the non-yielding
asymptote. Resonance response in this regime can be predicted using the nonyielding asymptote.
4. At even higher values of 77, the HD never yield and the HD system reverts to
an ES system.
Linear models that approximate the HD system Bode plots are proposed. In
particular, the model gives
1. The correct resonance position and magnitude;
2. The correct static asymptote;
3. The correct high frequency asymptote.
Two design methods for the HD system under harmonic loading is proposed. The
Specific Solution Method gives specific solutions to the problem, and uses simulation
data; the Viable Design Space Method works only with various asymptotes and is
more easy to use, as it involves no simulation data. It is possible to hybrid methods:
you can first use the Viable Design Space Method, and then use simulation data to
refine your answer.
73
74
Chapter 6
On Lambda Damper System
U
k
F
f
m
F
Af
-Af
Lf
k
-f
(b)
Figure 6-1: (a) An SDOF Lambda Damper (LD) System. (b) Its static stress-strain
curve.
A lambda damper (LD) system (Figure 6-la) consists of a viscous damper (VD)
system plus a lambda damper. Its equation of motion is
75
mi + cii + ku + fA(A, up,i)
=
F
d 2z
dz
2
d
+
2
d +z+rA(A,zp,,%)=
4dT
dT2
where
A(A, up, itp) = (A + (1 - A)H (upii)) sgn(up)
The LD system is, by itself, not physically realizable. But just as we managed to
base the design method of an HD system on that of an FD system, we hope that, by
studying the behavior of the LD system, we can gain some insight to the behavior
of the SMAD system.
In this chapter we aim to develop a design methodology for a LD system under
harmonic loading.
6.1
T1
Equivalent
Now assume the system undergoes a periodic motion (not necessarily harmonic), with
only one peak and one trough per cycle, with magnitude iL. The energy dissipated
by the LD is
Edis = 2fft(1 - A)
Compare this expression with that of an FD system:
E=is = 4f ft
If we equate the two equations we can define an equivalent friction level for the
76
LD system:
fe-
fe
=
A
f
F
fe f
y
-----Af4-----
zp
Figure 6-2:
f, represents
the mean level of force provided by the LD.
fe represents the mean level of force provided by the LD; see Figure 6-2. If we
now divide both sides by any F we have
1-A
22
7e
6.2
(6.1)
n
Simulation Results
We are interested in H, the dimensionless transfer function relating ft and
F.
We
shall examine its relationship with the 4 system parameters, p, , q and A.
6.2.1
Bode Plots
The Bode plots are almost boring; see Figure 6-3. We make the following observations:
1. Static deflection H, is still defined by H = 1 -;
77
10
X
2
=
-0.4,
4 = 0.02
2
10
-,
2
X = 0.6,
= 0.02
10
0
10
10
102
10
10
0
M
__
10-
10
10
102
0
10
-2
.
r = 0.2
__ = 0.4
. = 0.6
Yj = 0.8
4
-4
10
0
=
10-4
10 2
102
100
102
=
-2 log p. How-
P
Figure 6-3: Bode plots for the LD system.
2. Resonance still occurs at around p
=
1;
3. At high frequency we still have the same asymptote of log H
ever we do note that the asymptote is shifted downwards as A and rj increases.
6.2.2
Linear Models
Linear models proposed for the FD systems can be used here with no alteration.
6.2.3
A-Diagram
We know that in the boundary case of A = 1, the lambda damper provides no
damping.
Now the simulation result shows that, regardless of the value of
17,
a
lambda damper with A = 1 has very little effect on the magnitude of the resonance
response; see Figure 6-4. We can write this down as
Hres(, 7, A = 1) ~ Hres(()
78
0.02
25
20
15
Y1 =
5
0.2
a= 0.4
-
0.6
S= 0.8
-......
=
0
-1
-0.5
0
0.5
1
Figure 6-4: H,,, for A and 77. Dotted lines shows linear design curves.
We also know, by simulation or by the design method of the last chapter, the
resonance response of an FD system, HreS( ,,q, A = -1).
For value of A between -1
and 1, Hres varies fairly linearly with A; see again Figure 6-4.
Here we propose an approximation method to predict the resonance response of
an LD system: We join the two points described above with a straight line, and
assume Hre, varies linearly with A; see again Figure 6-4, the dotted lines show the
proposed approximation curves.
We base our design method on the proposed approximation curves.
6.2.4
Approximate Resonance Equation
If we accept the approximate resonance relationship, then, by geometry,
H VD(F
res \ /
-
LD
res
- A
_
HLD
res - HFD
1 res
1+
79
A
Rearranging,
H
1+ A
IAHFD~c
W
2
LD A)
VD
2
Substituting the expression for H( , TI) from Eq. (4.6) the FD approximate resonance equation, we have
Hrkei( , 7, A) =
H-A
)D
Hre(t)
1+A HVD
(1
Hrk (Drs A) = Hi (()
2
g*
S A*)
(1
(6.2)
We note that this is almost the same form as Eq. (4.6): we merely need to replace
ij
with Ie =
6.3
6.3.1
Ar, as defined by Eq (6.1).
Design Method
Design Procedure
We assume we are given
Hres
and A; A is material dependent and it's unlikely the
designer would have access to materials with a wide range of A.
1. Given :
(a) Find HrFe, as shown on Figure 6-5a. By geometry,
H
D2
1- A
LD
res
I1+ A
-
-,A~re
V
(6.3)
(b) With HrFX and , determine q following the FD system design method.
80
0.01
=
e= 0.0125, X = 0.5
50
.
4540 35.
El
HF
X
HLD
res
VD
H res( )
3
res
0
2.5k
2
30
I
25
1.5
20
1
15
10f
0.5 [
5-
0-1
-0.5
0
0
1
0.5
0.002 0.004 0.006 0.008
0.01
0.012
X
(a)
Figure 6-5: (a) Finding HFD when
(b)
c
is given. Here, given we want He
to be 40,
and given HVD = 50, we have to design for an FD system with HFD = 10. (b) Same
procedure performed over a range of .
2. We can repeat the procedure over a range of values of . Taking de =
2H---,
and using the approximate resonance relationship from Eq. (6.2),
277*
1- A
(I (e)
See Figure 6-5b.
3. Figure 6-5b suggests raising 77 over 1 for systems with
< 0.0085, in this
particular example. But q > 1 is fairly undefined for the LD system, as it is
in the FD system. This question of "What lies beyond one?" will be further
dealt with in the next chapter.
81
4. As usual, feel free to throw in any restrictions for static deflection, which would
appear on Figure 6-5b as a horizontal line of
6.4
m1
= 1-
H.
Summary
The response of a Lambda Damper (LD) system under harmonic loading on the
Bode plot is very much like that of a Viscous Damper (VD) system, but with some
difference:
1. The shape of the Bode plots are very similar.
2. Resonance for an LD system occurs near p
=
1
3. The LD system response curve starts with the static deflection H,
=
1 - 1,
instead of 1.
4. The high frequency asymptote of the LD response curve is shifted downwards.
The magnitude of the resonance response can be accurately predicted by the
proposed approximate resonance equation for LD system.
A non-cyclic design method for the LD system is proposed, taking as input Hres,
H, and A, and giving
and 77 as output.
82
Chapter 7
On Hysteretic Lambda Damper
System
'U
k
F
f
111A
m
F
Af
U
I+
//l
(a)
-Y)
(b)
Figure 7-1: (a) An SDOF Hysteretic Lambda Damper (HLD) System. (b) Its static
stress-strain curve.
83
A hysteretic lambda damper (HLD) system (Figure 7-1a) consists of a viscous
damper (VD) system plus a hysteretic lambda damper. Its equation of motion is
mu + ci + ku + kh(u
-
up) = F
for
mi + c + ku + f A(A,up,it) = F
Af < sgn(up)kh(u
-
up) < f
otherwise
or in dimensionless terms,
d 2z
dT
d4z
d
dr2
2
dz
+d
+ 2
dz
dT
+ z + y(z
+ z +IA(A,
z,
for
p
-
q1 <sgn(zp)(z
-
z) <-
otherwise
)
In this chapter we aim to develop a design methodology for a HLD system under
harmonic loading.
7.1
Pre-simulation Analysis
Here we think about how the 7-diagram changes when we go from the HD system
to the HLD system.
The non-yielding asymptote and the ES plateau should stay constant; they are
not functions of A. The FD asymptote would be replaced by the LD asymptote. We
can list the effects of the system parameter on the asymptotes of the 71-diagram:
84
Hres
decreasing (
increasing A
decreasing
Figure 7-2: This is the kind of r7 diagram we expect to see.
(
Controls the height of the LD asymptote and the Extra
Stiffness (ES) plateau.
-y
Controls the slope of the non-yielding (NY) asymptote;
increasing -y decreases the slope, and at -y = oc, the asymptote coincides with the r7 axis.
A
Controls the slope of the LD asymptote; increasing y
decreases the slope.
This is what we expect to happen, and we look forward to using the bulk of the
HD design method, only changing the FD asymptote to the LD asymptote to allow
for different values for A.
If we are lucky.
85
7.2
Simulation Results
We are interested in H, the dimensionless transfer function relating i and
. We
shall examine its relationship with the 5 system parameters, p, , rT, y and A.
7.2.1
Bode Plots
For low damping, specifically for r7 < 1, the systems behaves as expected, namely
that, on a Bode plot, we can identify:
1. A static asymptote at H, = 1 - 17;
2. A resonance peak at p ~ 1; and
3. A high frequency asymptote at log H
=
-2 log p.
The "other" cases exhibits this effect which we call the "missed resonance".
7.2.2
Missed Resonance
Remember the non-yielding limits p, and P2, defined by Eq (5.5):
p4
+
(4 2 -
2(l + y))p
2
+ ((1
)2
+
_
j2
If pi > 1, it means that the system "missed" its resonance. We call the value
of rj at which this first happens r/dip. When r/ = rlip, P1 = 1. We also note that at
T/ = rNip, HES(p = 1) = HNY . This gives an easier equation to work with:
HEs (p
=
1)
1
72 + (2 )2
86
-
HNY
-/dip
y
10
S=0.01,y= 1
2
10
2
= 0.01, y = 1
r
10
10
100
M
-101
increasing j
/
10
10
S= 0.8
S=1
-2
i
..........
0.8
q = 1.2
10-3
11 = 1.4
-Q= 1.24
10
104
10
100
-2
---
10
01
10
10
10
P
P
(a)
(b)
Figure 7-3: (a) A typical Bode plot showing the phenomenon of missed resonance.
Dotted lines donates the non-yielding limits for the 4 systems. Dashed line represents
the limiting ES system. (b) A zoomed-out view.
Hence
7/dip
Assuming -y >
2
+ (2 )2
(7.1)
, we have
rNdip
Theoretically this phenomenon also occurs in an HD system. In § 7.2.5 we shall
see why it was not discussed in Chapter 5.
We make the following observations:
1. Resonance occurs almost spot-on at p1, when the system is first allowed to
yield; this gives an almost vertical jump.
87
2. This peak is between the two peaks of two related systems:
(a) The LD system, with its peak occurring near p = 1 and its magnitude
predicted by the approximate relation in Eq. (6.2); this is the boundary
case when -y = 00.
(b) The Extra Stiffness (ES) system, with its peak occurring near p =
and its magnitude given Hes
1
=
; this is the boundary case when
1
=
1+ y
00.
And we note that Hes is smaller than the resonance response of either system.
The HLD system can be thought of as a passive variable stiffness system; tangent
The missed resonance is brought by this
stiffness decreases once we have H > (.
variability in stiffness.
7.2.3
When
Approximate Resonance Equation
and -y are given, Eq (7.1) gives
N7ip.
For SMAD systems with
71 < 7dip,
we
can predict its resonance response using Eq. (6.2), the LD approximate resonance
equation. Here we shall develop an approximate equation to predict the resonance
response for 1 >
N7ip.
We note that the portion of the H curve above
the non-yielding limit, is
HNY,
fairly piece-wise linear on the Bode plot. We propose a linear profile for this portion,
and that the portion joining (pi, Hres) and
(p2, HNY)
be approximated by a segment
of the straight line joining (p = 1, Hrs). Then by simple geometry (on the Bode
plot), Hes would be predicted by
log Hgs
log HL
H
± log HNY l
res
88
H~loge
1
P
(7.2)
10
12
10'
10
-11
1010 0
P
Figure 7-4: The resonance peak, at p = 1 is fairly well predicted by the LD approximate resonance equation. This point is joined to P2 at H = HNY. The value of H
read off at p, is our estimate of Hres. It is donated by a plus sign in the figure.
7.2.4
Linear Models
For HLD systems with 77
< Nlip,
the linear models introduced for the HD systems in
§ 5.3.2 can be used with no alteration.
For systems with 7 > qdip, we now follow through the same procedure in § 5.3.2
to produce a linear model.
1-P Collocation Linear Model
Here we collocate the resonance response at (pi, Hres). To shift the resonance away
from p
=
1 the base system employed would be an ES system. We state the result
89
as
p
liP
--
1
1
F.e
2HresVI +
Hip =I
VI + Y1
-Y1P
1-
/(i + 71YP - p2)2 + (2p(p) 2
The unintended side effect is that H,,
=p +
see Figure 7-5.
2-P Collocation Linear Model
We collocate the static response such that Hs,2P = H. We state the result as
$2P
H2P
=
=
HH(1 +
=
-V(I +
+)1ip
~H 8 (1+-I
71p
-
1p)
2
p )
2
)
+ ( 2 pt2P)2
Again, the unintended side effect is that the high frequency asymptote is shifted
downwards; again, see Figure 7-5.
3-P Collocation Linear Model
We add a phase gain compensator to translate the high frequency asymptote back
to its right position; see Figure 7-6. We simply state the result as
1 + p2
HP = H2P I+H(1
I+
7.2.5
r/-Diagram
Figure 7-7 shows some typical rl-diagrams.
90
)p 2
10
=0.01, i=1.2,y=1
2
10
10
Y=1.4, y=1
H
HI
H
10
10
=0.01,
H:
-
I
2
0
10
. .. .. .. .. .. .. .
\
.
.. .. . .. .. .. .
H2
-
2P
-H-3H
10
100
10
10
-.-.
.
0
I
10-2
-H
.-
-
-A
-1
102
-1
10
100
P
10
(a)
100
P
(b)
10
Figure 7-5: Two typical Bode plots, showing the 3 linear models. Note how both
Hip and H 2 p got only one asymptote right while H 2p got both asymptotes right.
(
......... comp.ensatox.
-P
2---aP
2-P
1)
(PI,
-P,
~(PI,
1+p
(--
Hs)
VITpH
Figure 7-6: Asymptotes of the 3 models in Bode plot. Adding the phase lead compensator to the 2-P model shifts the high frequency asymptote to the right.
91
=0.01, y= 1,
=0.01,y= 1, X=0
50
50
40
40
30
30
M:
M
20
20
10
10
0
= 0.2
5
.
0
10
0
5
10
TI
0=.Ol, y= 1, X =0.6
0.01, y= 1, X= 0.4
50
50
40
40
30
30
Ir
3I
20
20
10
10
01
0
5
0
10
0
5
10
1I
TI
Figure 7-7: Some typical ri-diagrams. LD and NY asymptotes are shown in dotted
lines, q = 1 is marked by a vertical dash-dot line.
92
We know increasing A decreases the slope of the lambda damper system (LD)
asymptote. We see a very obvious trend: H does follow the LD asymptote for small
values of 77, then at r7 = 1, it goes vertically down and then follows the non-yielding
(NY) asymptote. This big drop in H is due to the missed resonance phenomenon, as
described in
§ 7.2.2,
and we identified the value of r/ at which this happens at q = 1.
Here we understand why we did not notice the missed resonance phenomenon
when we were discussing the HD system. For the HD system, once we get to anywhere
r ~- 1 and 7 ~ 1, we can no longer associate the system with the FD approximate
resonance relations. Hence we never tried to characterize the resonance response of
the HD system in this regime.
The LD asymptote crosses the 7-axis at 2.
equivalently A < 1 - 2r* = 1 -
2 =
If this value is smaller than 1, or
-0.57, the phenomenon of missed resonance will
not happen.
Here we see very clearly the two ways which an HLD controls the resonance
response:
1. When we design in the LD asymptotic region, we are relying on the hysteresis
provided by the HLD to dissipate energy. The magnitude of the resonance
response is described by the LD approximate resonance equation.
2. When we design in the missed resonance region, we are relying on the passive
variability of stiffness provided by HLD to control energy input.
7.3
Design Method
As the system grows more complex, it becomes increasingly difficult to specify a
design method which gives specific answers, as in the Specific Solution Method for
93
the HD system. If we are to follow the same route, we would find
'ydis
or T/Opt to be
1
functions of 3 variables; hardly feasible to be documented on a design chart .
Hence we identify our job as to identify a "reasonable" design space. The user
would choose a solution from this design space, and the user may then use the
simulation data to fine tune the design.
The fine-tuning is likely to be a manual process; see for example Figure 7-8, a
program developed to present the simulation data with a graphical user interface.
1
102
50E
40
0.5
30
100
-- - -- - -
>1 0 - -- - ---
20
-0.5
10
0
-1
0.5
t
0
5
0
1
10-2
10 10
xi
40
40
30
n n-7
0.01
0rho= 0.4
0.5
X
1
n
-
Ita = 1.4
10
0
7
0A
4 A
=
01W
20
20
0.01
C -r)4
~ambda=
I
=
H_{max} = 5.4727 at rho = 1.2, \ide
= 0.09175
H = 0.54347, sr = 0, sstype= 1
rho_{ny }= 1.1341, 1.6473
50:
60
20
101
100
i
F
\gamma =J4
100
.1
Figure 7-8: This program shows how H and Hres varies with any of the system
variables, together with asymptotes and other features. After identifying an initial
design, this kind of program would be useful for fine-tuning the final solution.
'Unless there are ways to decouple the influence of different variables; the prime example is
the approximate resonance relation for LD, where 4 dimensionless variables interacts to form a
relationship concerning only two variables, Hf and
j +.
94
7.3.1
rI-Diagrams
We shall base our design method on the Viable Design Space Method we developed
for the HD system. This means the central diagram we work with is the a-diagram.
/
/
/
/
/
/
Hres
d creasing
,-line
increasing A
r/2-line
/
/
/
/
/
/
/
/
/
/
decreasing 7
7* I
7
0
(a)
1-line
71
1
(b)
Figure 7-9: (a) How the LD and NY asymptotes change as the 3 system parameter
change on the ri-diagram. (b) The viable q design chart.
Figure 7-9a shows the truncated LD asymptote and the non-yielding asymptote,
and how they varies as the system parameter varies. As for the HD Viable Design
Space Method, if we now specify a desired value for Hres, and if we fix the value for
A, we can construct the viable r/ diagram on the double-y-axis graph of r71- -72-7Y; see
Figure 7-9b. To construct the viable rq diagram,
1. Mark the x-axis for r7,the left y-axis for
2. Join (O,
2=re)
and (*,
0).
95
and the right y-axis for .
(a) If
2
< 1, this is the rj1-line.
(b) Otherwise we draw a vertical line at 7 = 1. The lower portion of this
vertical line, with the higher portion of the original q-line, forms the
actual 71-line. We call the vertical portion the missed resonance (MR)
asymptote.
3. Construct a straight line, starting from the origin, with a slope of
- with
respect to the -y-axis. This is the T 2 -line.
4. Construct a vertical straight line at I, = 1 - H. This is the n,-line.
7.3.2
Procedure
Given the viable 7-diagram we want to come up with some specific value for the
system parameters. We understand the values suggested by the viable 7-diagram
only represent the asymptotic values; nevertheless, the approximation is fairly good
as long as we start with a reasonably large value value of -y (-Y > 2 is often good
enough).
That fixes a value for -y. A is assumed to be given. Then we have the following
viable 77-diagram (Figure 7-10):
At this stage the design decision involves only choosing a ( , 77) pair on the 71 -line.
The FD design method has already laid out guidelines as to how to choose the
(
, TI)
pair. We do a quick recap here:
1. We can use the viscous damping inherent in the system as , then determine 77
by reading off the 7i-line.
2. If there is a H, restriction we need 77 > 1 - H,.
96
/r-line
2H,
) 1-line
0
12n
1-A
Figure 7-10: Assuming y is reasonably large, the r/1-line is a good approximation to
the actual response.
3. Later in chapter 8 we shall see that 71 is directly related to the amount of
SMA used. If we want to minimize the amount of SMA used, we may opt to
compromise by providing less rj and more viscous damping. We may choose to
pass the 71-line directly to an optimization routine to get the ( , 77) pair.
7.4
Summary
The response of a Hysteretic Lambda Damper (HLD) system under harmonic loading
is studied. The responses are very much like that of an HD system, apart from the
regime where A > 1 - 27* and r7 > 1. There we see the phenomenon we call the
"missed resonance": resonance occurs at p > 1, and the resonance response decreases
drastically as r increases. The HD linear model is revised to accommodate the shift
of resonance position.
97
The Viable Design Space Method for the HD system is revised to take into account
the effect of A and missed resonance.
98
Chapter 8
On SMA Damper System
U
//
k
I
k
/
C
m
C
m
F
F
A
SMA
-V
-
/
(a)
(b)
Figure 8-1: (a) The SDOF SMA Damper (SMAD) System, modeled by (b) the
Hysteretic Lambda Damper (HLD) System.
In the HLD system the design parameters of r, -y and A are supposed to be
99
independent. You can vary one without affecting the others.
This is not the case for the SMA damper (SMAD) system. Using SMA poses
additional restraints on the design space accessible.
This chapter addresses these issues, and aims to provide design procedures that
takes these factors into account.
On Shape Memory Alloy
8.1
Figure 8-2a shows a typical stress-strain plot of SMA. On stress-strain graph we can
identify
500
450
/
400,
350
300
'
250
6p
20(
150
X
100
CF
Xa
50
0
0
0.02
0.04
0.06
0.08
/
/
/
/
/
/
/
/
/
/
/
/
/
a
7A
(a)
)
Et
(b)
Figure 8-2: (a) Et, EA, cf and ASMA can be identified from a stress-strain plot. (b)
# fulfills
the function of -y in the material model.
100
Et
The Young's modulus during phase transformation
EA
The austenite Young's modulus
Of
The transformation stress
ASMA
The return stroke parameter
Emax
The maximum allowable strain
Et
We define
The maximum transformation strain
A=A-1.
#
works like -y, but on the material level; see Figure 8-2b.
Assume we use a bar-type SMA specimen, which take both tension and compression. Take any specimen with constant cross-section A and length 1. The stress-strain
graph is transformed to the force-displacement graph by
F-aA
e
=
El
nF
in reasing A
icreasin
I
'U
Figure 8-3: Changing the length and cross-section area of the SMA bar does not
change # and A.
101
This is a simple scaling, and we note that the graph keeps its shape. Specifically,
the ratio
- stays constant at (1 +
#), and
A stays constant. Then the SMA damper
can be modeled as a hysteretic lambda damper, with parameters k= EtA/l, A
ASMA,
f =raf A and -y = q. Note that of the 4 parameters, A and
'y =
=
are wholly
determined by the material parameters and cannot be changed (unless by changing
the alloy composition, or operation temperature).
Typical values for
ASMA
are 0.5-0.6; typical values for
how we can estimate these parameter in
8.2
8.2.1
#
are 60-70. We shall see
§ 8.4.
Design Scenarios
SMA Dampers with Springs
The SMA damper, in most cases, does not work alone. Figure 8-4a shows the SMAD
connected in series with a spring, Figure 8-4b, in parallel. The way these connections
affects the shape of the static F-u curve is shown on Figures 8-4c and 8-4d. If we
label the resultant -y of the series system
,, and that of the parallel system ^yp, Y,
and 7p are given by the following equations:
-(1'y
1
7_ (=
1 + # +1
' 1+q5-(I
1+ # +
+
1+
=
In particular, we note that at y
=
(8.1)
(8.2)
0, the parallel system reverts to a simple SMAD
and at -y = oc, the series system reverts to a simple SMAD. The equations (8.1)-(8.2)
are shown graphically in Figure 8-5. Here we see that -y ultimately stems from 0; in
102
a
a
k
IF
/
F
SMA
SMA
/
(a)
F
(b)
hF
k(c k /ykt
(I+#O)kt
(I + #kt
(+
(I
+ -)kt
(1 + #kt //7kt
a
(C)
(d)
Figure 8-4: An SMA damper connected to a spring (a) in series and (b) in parallel.
Figures (c) and (d) shows how the spring changes the static F-u curve. ki // k2
means ki is connected in series to k2 , and is a shorthand for the operation kk 2
103
a real system, -y can never go above 0. The best that we can do is to use use only
SMA and no other springs to provide stiffness, and use a rigid link to connect the
SMA damper to the system.
70
60
YP
50
LIV
40
30
20
10
O'
10
10
10
10
4
Y
Figure 8-5: Showing -X, and -y as -y varies.
We note that A and
8.2.2
f stays
constant.
Initial Design
Figure 8-6 shows the system under consideration. By "initial design" we mean that
we know the final desired k of the system i.e. the k for the HLD system. This implies
two things:
1. k, in Figure 8-6 is not fixed; it can be changed to keep the resultant k at the
desired level.
104
U
F-
F
M
c
ke
-
SMA
Figure 8-6: The SDOF SMAD system under consideration.
2. For all design methods proposed so far, they work with H =
. We cannot
know H without knowing k. Similarly, we need to know k to get from c to (.
To simplify life we assume the SMA damper is attached to the system interested
by a rigid link: k, = oo.
We shall label the parameters that apply to the resultant HLD system with
subscript "HLD". First we note
kHLD
is given simply by
kHLD =
k1 + kt
This is a parallel connection, and Eq (8.2) applies:
7HLD
where -y1,t =
--
+
1+ -1,t
k.
1. The following variables are treated as given:
105
1
kHLD,
m, nmax, A,
,
Et, 0f, F
We aim to come up with value for the dimension of a bar-type SMAD (A and
1), and k 1 .
2. Determine
max
Hes
F/kHLD
3. Given Hres, A, using the HLD system design method, determine
and r.
4. Determine
0f
Emax
5. If 1 is unpractically small (too short to make connection to, for example), use
a reasonable value for 1.
6. Determine
Et A
1
k1
7YHLD
=kHLD
-
1 + Y1,t
kt
~ I
7. Check if the value for 7HLD is "reasonably high" (typically a value of 2-5
suffice), or feed the values to a simulation program (or check with a database
of simulation result) to see if the design is adequate. If not, we can rearrange
106
Eq (8.2) to give
-
YHLD
'YHLD
kt
kHLD
=
1 + -Y1,t
This would lead to a larger SMAD:
A =
8.2.3
1
Et
Retrofit Design
The same system is under consideration, but this time, the value of k, is fixed. The
obvious challenge is that
kHLD
is a variable this time.
Again to simplify life we assume the SMA damper is attached to the system
interested by a rigid link: k, = oc. And we note again that
kHLD
k1 + kt.
1. The following variables are treated as given:
ki, m,
Umax, A, 0, Et, of,
F
We aim to come up with value for the dimension of a bar-type SMAD (A and
1), and kl.
2. Using engineering judgement, choose a value for
is
?HLD=
5.
3. Determine
kt
=
7YHLD
-
kHLD=
107
_
_7HLD
k1 + kt
YHLD.
One recommended value
Hres =
4. Given Hres, A,
'YHLD,
max
F/kHLD
using the HLD system design method, determine
and r7.
5. Determine
f = gi7
A= f
07
EtA
6. Check I >
u-ax ,
and also that 1 is large enough for actual construction of
damper. If I is to be increased, we need to increase A as well:
~
Et
A =
This increases
7I,
and you may decrease c according to the HLD design method.
From the two design scenarios we see several factors affecting the amount of SMA
to be used:
1. A high 77 comes from a high cross-section area for the damper; to boost rj we
need more SMA. This effectively specifies a minimum value for A.
2. A high -y comes from a high SMA/k
ratio; to boost -y we need more SMA.
This effectively specifies a minimum value for
A.
3. The strain range of the stress plateau for SMA is well defined at Emax
accommodate uma, we require 1 >
Umax
value for 1.
108
To
. This effectively specifies a minimum
8.3
Damper Configurations
The bar-type damper is the simplest configuration, but is not the most common one;
SMA wires are far more common. Prestressing in SMA wires is also common. We
shall look at how these configurations affect the static F-u plots.
8.3.1
Bar Type
An SMA bar takes both tension and compression, and has a simple F-u relationship
shown in Figure 8-3. kt is given by
Et A
# and A
8.3.2
are not changed.
Wire Type
A wire gives no compression force; mathematically, F = 0 for u < 0, see Figure 8-7a.
With a configuration like Figure 8-7b, two wires are used and together they provide
stiffness for both positive and negative directions of u. kt is given by
EtA
kt = E cos 2 o
1
8.3.3
Prestressed Double Wire
One boring way to prestress is to move the origin to the center of the hysteretic loop,
and treat the system as an HD system; see Figure 8-8a. We can call it complete
prestressing.
109
Fu
f
Af
U0
(b)
(a)
Figure 8-7: (a) The F-u plot for an SMA wire. (b) One way to use SMA wires to
provide stiffness in both positive and negative directions of u.
An interesting case is partial prestressing; in particular, we prestress the wire
such that we relocate the origin at one corner of the hysteresis loop; see Figure 8-
f,
8b.
for A
A and kt are not affected by this prestressing, but
=
0.5,
#
#
is; in the ideal case
increases to 20 + 1. The system is strictly speaking not an HLD
system any more-note, in particular, that the stiffness provided in the subloops is
still (1 +
# 0)kt
instead of the 2(1 + O)kt near the origin. But it is close enough, and
in cases where a particularly high b is needed, this configuration can be considered.
The reason partial prestressing has this special ability to increase 0 is that the
"tail" part of the stress strain curve provides stiffness only around the origin. So
around origin the stiffness is doubled, but once outside that region the stiffness stays
at kt.
110
I
(a)
j
(b)
Figure 8-8: (a) Using complete prestressing to simulate an HD system. (b) Partial
prestressing effectively doubles #.
8.4
Material Parameters from Brinson's model
Apart from presenting a series of stress-strain curves, one of the most common way
to specific the properties of an SMA in the literature is by specifying its Brinson
parameters. This section shows how to extract various parameters from the Brinson
parameters. For more information on Brinson's model, consult
[3],
[2].
Figure 8-9 shows how to read the transformation stresses off Brinson's transformation diagram on the right, given a specific temperature. We shall go through the
parameters that we are interested in one by one.
EA
The austenite Young's modulus.
This is given in the Brinson parameters as Da.
'We give the parameters this collective name for the lack of a better name. The actual parameter
names predates Brinson's model; for example [7] used the same parameter names.
111
%nCt
500
450
450
- . . . . . . . . . .. . . . . . . .. .. .. .
400
CY
.400
350
350
300
300
. Ms
. ................... ....
250-
e 250
- . . . . . . . .. . . . . . . .
200
200
150
1501
100
100
50
M
f
M
.... .......
s, f
50t
0
0
0.02
'S
0.04
m'x
0.06
0.08
20
Wi1
S40
60
T (deq C)
Figure 8-9: Given temperature T, we can read off the critical transformation stresses
off the Brinson parameters.
6max
The maximum allowable strain.
We consider a special case, where we specify the load path from g.AI 8 , the
martensite transformation start stress, to aMf, the martensite transformation
finish stress. The strain state at umf gives
6
max.
-(t)(s
Q(o)so + 0(T - To)
-- go = D(c - D( o)6o +
Plugging in the right quantities, we have
UMf
Emax =
Dm
+
EL
where Dm and EL are both Brinson parameters.
Et
The maximum transformation strain.
112
Brinson's model gives
This is just
max,
minus the elastic strain. It is given by
t
= Emax -D
07M8
Et The Young's modulus during phase transformation.
This is given by
Et= (amf -
aM,)/Et
cif The transformation stress.
We extrapolate the straight line approximation during martensitic transformation and get
- (iE) Et
afUMS
Uf = 0-Ms
ASMA
EA
The return stroke parameter.
This is given by
ASMA
=
JMf
~-
As
aMs
8.5
Summary
Design method that links the SMA damper to an HLD system is proposed.
In
particular, we identify two large class of problems, the initial design type and the
retrofit type, which requires different design techniques.
The SMA damper dimension can be specified by 2 (generalized) parameters, cross
section area A and length 1. Three factors affect the amount of SMA to be used:
1. q; specifies a minimum value for A.
113
2. -y specifies a minimum value for
1*
.
3. umax specifies a minimum value for 1.
While wires cannot withstand compression, using wires in pairs can provide stiffness in both directions. Wires also allow prestressing, which gives further tools to
manipulate the stress-strain curve of the system.
This chapter also shows how design parameters can be derived from the Brinson
parameters.
114
Chapter 9
Conclusion
The behavior of 3 systems under harmonic loading were examined: the friction
damper (FD) system, the hysteretic damper (HD) system, and the hysteretic lambda
damper (HLD) system. Their behavior is compared to that of a basic viscous damper
system without the FD/HD/HLD.
The Friction Damper System behaves like a viscous damper (VD) system in
some ways:
1. The shape of the Bode plots are very similar.
2. Resonance for an FD system occurs when the tuning ratio p
=
~ 1
3. The high frequency asymptote of the FD response curve on Bode plot has the
same slope of -2 as that of the VD system.
One important difference is that its static deflection H, is decreased from 1 as the
friction level increases.
A linear model for the FD system is developed. A simple relation is found to relate
the viscous damping ratio and the friction level to the magnitude of the resonance
115
response. A design method is accordingly developed.
The Hysteretic Damper System behaves like an FD system up to some value
of 1I,
ij
being a measure of the friction level. If the friction level goes beyond this
level, the resonance response rises again.
Two design methods for the HD system are proposed:
1. The Viable Design Space Method, which involves only asymptotes and uses
no simulation data. It is intuitive, easy to use, and approximates the system
response well as the HD system approaches the FD system.
2. The Specific Solution Method, which uses simulation data to give the exact
bounds of permissible system parameters.
The Hysteretic Lambda Damper System behaves like an HD system up to
a certain value of A, the return stroke parameter; it is discovered that, as A increases
beyond a certain value, the phenomenon of missed resonance occurs. This can be
thought of as a passive variable stiffness scheme, and the resonance response is greatly
decreased. Important features for the missed resonance include
1. Resonance occurs at p > 1.
2. Static deflection decreases from 1 to 1 3. The high frequency asymptote is the same as that of a VD system.
A linear model for this regime is also developed. A design method, based on the
Viable Design Space Method for HD systems, is developed, taking into account the
effect of A and the missed resonance effect.
For the SMA Damper System, a two step design method is proposed:
116
1. Design for an HLD system.
2. Size the SMA damper according to the system parameters of the HLD system
designed.
Several SMA damper configurations are discussed, and method to extract relevant
design parameters from the Brinson parameters are given.
117
118
Chapter 10
Further Works
This chapter suggests the direction of some further work.
10.1
SMA embedded beam
10.1.1
Moment-Curvature Relation
Assume some SMA bars, of total cross section area A, is embedded in a beam section,
symmetric about the neutral axis; see Figure 10-1a. We scale the SMA stress-strain
curve to get the moment-curvature relationship of the embedded bars (Figure 10-1b):
M =
Ad
d
Hence, in terms of moment-curvature relationships, any section of the embedded
beam behaves like an HLD system on its own.
119
M
00
7
N. A.
E(1J
0
+
0
(b)
(a)
Figure 10-1: (a) Cross section of an SMA embedded beam.
curvature relationship contributed by the embedded SMA bar.
10.1.2
(b) The moment-
Statically Determinate Structure
One characteristic of a statically determinate structure is that its moment distribution is not affected by the material constitutive relation; see Figure 10-3a. The
curvature response of this system would be the same as the displacement response
of a series of unconnected HLD systems; see Figure 10-3b.
The simplest of these systems would be a cantilever with end moment loading;
see Figure 10-4a. Let the cantilever be uniform along its length. Since the moment
profile is constant along the length, its moment-rotation relationship is again given
by simple scaling; see Figure 10-4b.
Take the cantilever under an end point load as a more interesting example. We
define a loading parameter, a, as P = acC.
Figure 10-5a shows the curvature profile
of the cantilever during loading, and Figure 10-5b unloading, for a cantilever with
y = 20 and A = 0.6.
120
El
M
-yEI
m
Figure 10-2: The equivalent HLD system, relating moment to curvature.
In order to get to the deflection profile from the curvature profile, we use a small
displacement assumption:
d 2v
dx 2
We can then integrate the curvature profile twice to get the displacement profile. Figure 10-6a shows how the end displacement UL varies with with end load P,
with a few subloops included. We note that, while not piece-wise linear, the forcedisplacement relationship does show the typical HLD characteristics. In particular,
1.
=7
as expected in the yielding regime;
2. Hence the non-yielding/yielding stiffness ratio is still 1 + -y. The ratio -y + 1 is
being carried over from the moment-curvature relationship.
3. As the whole beam does not yield at the same time, there is a gradual transition
between the non-yielding regime, with slope (1+y) ', and the yielding regime,
121
P
F
(b)
(a)
Figure 10-3: (a) Moment distribution of a cantilever, a statically determinate structure, under point load. (b) The effect of the moment profile on the curvature profile
of the beam is the same as the effect of a force profile on the displacement profile of
a series of unconnected HLD systems.
with slope
3E.
The overall effect is that the yielding regime is shifted upwards,
and A is effectively lowered.
10.1.3
Suggested Further Works
Apart from bar-type and wire-type SMA dampers, we found that the SMA-embedded
beam can also be described by an HLD system; for example, the two systems shown
on Figure 10-7 can both be reduced to a simple SDOF HDL system. This is one step
forward to placing SMA in the niche of micro-damper, as discussed in
@1.2.
The aim
is to come up with a design methodology, which specifies the spatial distribution of
the relevant parameters.
122
M1 0
ANm
Moment
M
(1+
L
(a)
Y)
(b)
Figure 10-4: (a) A cantilever under end moment loading gives a constant moment
profile. (b) Its moment-rotation relationship is again given by simple scaling.
Loading,
a increasing from
0 to 1.3
unloading, a decreasing from 1.3 to 0
0.3
0.3
0.25
0.25
0.2
0.2
E 0. 151
E 0.15
0.1
0.1
a
increasing
-
-
0.05
0I
0
0.2
0.4
a decreasing
--
0.6
0.05
0.8
-j
n
1
0
x/L
0.2
0.4
0.6
0.8
1
x/L
(a)
(b)
Figure 10-5: (a) Curvature profile of th e cantilever during loading. (b) Curvature
profile of the cantilever during unloadin g.
123
y = 20, X = 0.6
4
6
3.5
5
increasing y
3
4
E
2.5 F
E
3
y=
2[
a-
-y=
1.5
-
_
2
1
0
.
I.
1
=
_y
-
1
0 5
2
y=
5
y= 10
y= 20
0.5
y =50
0
0
0.5
0
1.5
1
0.2
0.6
0.4
0.8
1
2
UL [mfL /E1]
UL [mfL2/El]
(b)
(a)
Figure 10-6: (a) Force-displacement relationship for the cantilever end point. (b) Its
behavior over a range of -y.
SMA embedded bea
P, U
U
P
m
m
Figure 10-7: Both systems can be approximated by a simple SDOF HLD system.
124
P
Figure 10-8: The SMA bar position d is now a function of x. -y becomes a function
of x too, while qj is still waiting to be redefined.
125
126
Appendix A
Simulation Details
In all simulation we work with the non-dimensionalized equations.
A. 1
Various Parameters
Parameter nprec donates the precision level desired. In general we want a time step
At to be
1
lnprec
of the shorter between the loading and the natural period of the system.
In the simulations, we used
rtprec
=
50.
p<1
Shorter Period
dr
=
dT'P
1
nprec
T= WnTn
of the shorter period
Number of intervals in Tp
p>
=
27
1
rp = P
27r
27r
flprec
flprecP
flpre
p
-h
27r
=
P
nprec
But the program check for convergence every loading period, so for an easy implementation of the algorithm we require m to be an integer. We recast the above
table:
127
p<
1
p>
rn = WnTn = 27r
Shorter Period
m, Number of intervals in Tp
ceil(nPrc)
p
dT
ceil(
-
__
m
27r
mp
27r
fprec
p
1
=
-
2=
nprec
27r
)p
nprccP
Convergence criteria
A.2
We consider the system to be in steady state when
1. During the last 5 loading periods, the largest difference in umax is less than 2%
of the mean level of umax; or
2. During the last 5 loading periods, the largest imbalance in energy flow is less
2% of the smallest energy input over one cycle
The whole history of umax for each loading cycle forms the envelope function. If
the envelope appear to be oscillating, and the magnitudes of its last 5 peaks agree to
each other within 2%, AND the magnitudes of its last 5 troughs agree to each other
within 2%, we would also conclude that the system is in steady state, and that H is
given by the mean value of the last 5 peaks and troughs.
A.2.1
Energy Balance
Energy input is given by
1 F2)
k 12
128
dz
d
Energy dissipation is given by
E=
1F2
(2
k
)
4 dTZE
4(drdT)
A(zp, %p)dzp=
2rq/
dz
1F2
2r/dT
2 k)
Note that we can use dTr instead of dT7-- because A
-
not yielding, and whenever the damping is yielding,
A.3
2
Z A(z,, %')dTdz
0 whenever
the
is
hnvr
h damper
apri
dz = d.
Newmark's Method
In this project all numerical time integrations are done by the Newmark's Method.
Z= 0.25 and 6 = 0.5 are chosen; the Newmark's scheme reduces to the constant
acceleration scheme, which is unconditionally stable.
Newmark's Method makes the following approximation to the response:
i+1 = &i + [(1 - 6)Ui + 6Ui+1 ] At
Ui+ = U + U2 At + [(1/2 - a)U2 + aUi+i]At 2
Substituting the above approximation to the governing equation at time step i +1
M
i+1 + CUi+1 + KUi+ 1
129
=
Rq+1
leads to
I 0
-aAt
:1
2
U
L
0 I
0 o M+6AtC+aA
I
AtI
0
I
-K
(1/2
-
a)At 2l
U
0
+
(1 - 6)Atl
-(C + AtK) -((1
- 6)AtC + (1/2
A.4
Equations of motion
A.4.1
Viscous Damper System
a)At 2 K)_
-
U
i
0
R
mii+ciz+ku=F
d2 z
CTr
+ 2
dz
fIT
+ z= I
The actual implementation is
z
(1 + 2(5Ar + aAT 2 )Zi+1
z
=
-
-
Si+1
1
AT
1
AT+
(1/2
(1-
130
2
(1/2 - a)AT2 + 2 (1 -
a)AT21
6)AT
J
z
+ zi}
6AT
A.4.2
Friction Damper System
mii+cit+ku+fsgn(it)=F
d2 z
dz
2c
dT2+
dz
+ z + 7/sgn( -- )
The mass may "stick" and stop moving whenever velocity changes sign. The
condition for stick is
P - z| < r7
|F - kxf < F or
The actual implementation is
(1 + 2&5AT +
aAT2 )Zi+1 =
Fj+1 - 71 sgn(ij)
z
- [I
(1/2 - a )AT 2 +
AT + 2
2 (1 - 6)AT I
z
Whenever
zl
L
z i
[o
AT
(1/2
1
(1
-a)Ar
-J)A
2
aAT
6AT
changes sign, condition for stick, P - z < r7, is checked. If it does
not stick, the same calculation is carried out, with the -r sgn(%i) term left out; we
assume the friction damper is not active in the interval AT when the velocity changes
sign.
On the other hand, if
does not change sign, r sgn( 2 ) = r7sgn(%j+ 1 ), so the above
equilibrium equation is still describing
T =
131
ri+1-
Hysteretic Damper System
A.4.3
Before yielding
mii+cit+ku+kh(u-up)= F
d 2z
dT
2
dz
+ 2-
+ (y + 1)z= F +
zp
Note that, in order to preserve the accuracy of the Newmark's method, the yz
term has to be grouped to the LHS
-y is an extra stiffness to be accounted for, -yz
is not just an extra external force.
The actual implementation is
(1 + 2(6r+a(y + 1)AT2 )zi+l
=
F+ 1 +
yzP,i
z
(-Y
+ 1)
zl
-~
1
I
z
1 AT (1/2 -a)Ar21
~[0
Again, -
(1/2 - a)(-y + 1)AT 2 + 2 (1 - 6)AT
(-y + 1)Ar + 2
ozAT2}
+ zi+1
(1- 6)AT I
6AT
=yzp,i+1 if the damper is not yielding, so the above equilibrium
equation describes the system at
T = Ti+1.
Test for yielding
Condition for yielding is -yk Lu - upl >
f,
or Iz - zJ > -1. If the damper yields, the
calculation below is carried out.
132
During yielding
mi +cit+ku+fsgn(t)= F
d2 z
dz
dz
2+26-+z+sgn(-)=F
dr
dT2
dT
The expressions are the same as those for a friction damper, and the same algorithms are used for simulation. One extra equation is needed:
zp,i+l = zi+l - sgn(zi+l - z,,)
Permanent plastic strain
Earlier in Chapter 5 we stated that the non-yielding condition under harmonic loading as H < -2.ly But due to transient response, the steady state solution may acquire
a permanent plastic strain in the simulation.
1+Y
rL
ZP
-y
..............
...........
------------
-------------------------
I/
Figure A-1: At steady state, due to a non-zero z, the equilibrium position may shift
from z = 0 to zo, the dash-dot line. The limit of vibration for which the friction
element is not active is shown in dotted lines.
Assume the system is in a non-yielding steady state with a plastic strain of zp.
133
This shifts the equilibrium position zo of the system:
zo +-y(zo - zp) = 0
kuo + yk(o - up) = 0
1O
+
-P
The difference between the actual vibration magnitude H relative to z = zo and
the measured vibration magnitude Hm relative to z = 0 is zo:
Hm= H + zo
and the non-yielding condition is
H + (zp - zo) <
This two piece of information are useful in the following situations.
1. In the simulation, given a non-yielding response with z, > 0, we can get the
actual vibration magnitude by
H = H, - zo = Hm
-
1 +
z
P
2. Given a system of rI, -y with a response of H, we understand that a plastic
strain up to
zp <
2
- H) (1-+ -Y)
can be admitted while the system remains non-yielding.
134
A.4.4
Lambda Damper System
mi + i + ku + fA(A, up, it) = F
d2z
dz
2
dT
dT
z+r yA(A,z,,p)
=
P
For the LD system, z = zp, but we keep the separate notation for clarity.
The mass may "stick" and stop moving whenever velocity changes sign.
condition for stick is
FA =F-z-2
d2 z
dz
-
dT
-
2
dT2
for z>0
for z < 0
This is equivalent to
7A
< sgn(z)F < r
135
The
The actual implementation is
(1 + 2
,AT + aAT 2 )Z
F+ - i7 A(A, z,,i, %P,i)
z
-
zN
4+
[I
-
AT+
AT
1
(1/2 - a)AT2 + 2 (1 -
2
(1/2 - a)A21
-z
2
aAT
6A T2
(1 - 6)AT
Two transitional cases need to be considered:
*A
-.
...- .
1 -...I+A
2
A
{-1-A
2
A*
----
Figure A-2: The A-box is assumed to provide the mean level of force during the AT
when zp or %p changes sign.
1. Whenever %changes sign, condition for stick, r7A < sgn(z)F < r, is checked.
136
If it does not stick, the same calculation is carried out, with A = sgn(z)+
;
we assume the lambda damper spends equal amount of time in the two states
(2 < 0 and 2 > 0) when it changes states, and provides the mean level of force
of the two states during the AT when the velocity changes sign.
2. Whenever z, changes sign, the same calculation is carried out, with A =
sgn(i) -
; we assume the lambda damper spends equal amount of time in
the two states (zp < 0 and zp > 0) when it changes states, and provides the
mean level of force of the two states during the AT when zp changes sign.
In all other cases, A(A, zp,i, 2p,,)
equation is still describing T
A.4.5
=
= A(A, z1,i+1, p,,ji), so the above equilibrium
ri+j.
Hysteretic Lambda Damper System
Before yielding
mu + cit + ku + kh(u d 2z
2
=
F
dz
dT + 2(d
+ ('
+ 1)z = F + -Yzp
This is the same expression as that of a HD system, and we use the same algorithm.
137
Test for yielding
This is a special procedure to be carried out if we have z,,
=
0. It represents a
special kind of yielding test; the damper does not yield if
I -T
This represents the vertical portion of the stress-strain curve for the lambda-box.
In any other case i.e. z, / 0, condition for sticking is
< sgn(zp)(z - zp) <
Otherwise the damper yields.
1
-Y
If the damper yields, the calculation below is
carried out.
During yielding
mii+c6+ ku + fA(A,up,ni)
dz
d2 z
2
dr2
+
2
-+z+qA(Azp,,zp)
dr
+
d
=
F
=F
The expressions are the same as those for a lambda damper, and the same algorithms are used for simulation. We note that, while yielding,
P=
138
z
One extra equation is needed:
zp,i+l = zi+1 - Aj+1
Test for locking
If the damper yields, and zp changes sign, we again have to do the locking test. If
tzw <
then we set zp,i+l to zero.
139
140
Bibliography
[1] F. Auricchio, S. Marfia, and E. Sacco. Modelling of sma materials: Training
and two way memory effects. Computers and Structures, 81:2301-2317, 2003.
[2] A. Bekker and L. C. Brinson. Phase diagram based description of the hysteresis
behavior of shape memory alloys. Acta Metallurgica, 46(10):3649-3665, 1998.
[3] L. C. Brinson. One-dimensional constitutive behavior of shape memory alloys:
thermomechanical derivation with non-constant material functions and refined
martensite internal variable. Journal of Intelligent MaterialSystems and Structures, 4:229-242, April 1993.
[4] Reginald DesRoches, Jason McCormick, and Michael Delemont. Cyclic properties of superelastic shape memory alloy wires and bars. Journal of Structural
Engineering,pages 38-46, January 2004.
[5]
Mark A. Iadicola and John A. Shaw. The effect of uniaxial cyclic deformation on
the evolution on phase transformation fronts in pseudoelastic niti wire. Journal
of Intelligent Material Systems and Structures, 13:143-155, February/March
2002.
141
[6] C. Lexcellent, S. Leclercq, B. Gabry, and G. Bourbon. The two way shape
memory effect of shape memory alloys: an experimental study and a phenomenological model. InternationalJournal of Plasticity, 16, 2000.
[7] C. Liang and C. A. Rogers. The one-dimensional thermomechanical constitutive
relations for shape memory materials. Journal of Intelligent Material Systems
and Structures, 1:207-234, April 1990.
[8] C. Liang and C. A. Rogers. The multi-dimensional constitutive relations for
shape memory alloy. AIAA Paper,91:1165, 1991.
[9] Brendon Malovrh and Farhan Gandhi.
Mechanism-based phenomenological
models for the pseudoelastic hysteresis behavior of shape memory alloys. Journal
of Intelligent Material Systems and Structures, 12(1):21-30, January 2001.
[10] Yuji Matsuzaki and Hisashi Naito. Macroscopic and microscopic constitutive
models of shape memory alloys based on phase iteration energy function: A
review.
Journal of Intelligent Material Systems and Structures, 15:141-155,
February 2004.
[11] Hisashi Naito, Yuji Matsuzaki, and Tadashige Ikeda. A unified constitutive
model of phase transformations and rearrangements of shape memory alloy wires
subjected to quasistatic load. Smart Materials and Structures, 13:535-543, 2004.
[12] Harsha Prahlad and Inderjit Chopra. Development of a strain-rate dependent
model for uniaxial loading of sma wires. Journal of Intelligent Material Systems
and Structures, 14:429-442, July 2003.
142
[13] S Saadat, J Salichs, M Noori, Z Hou, H Davoodi, I Bar-on, Y Suzuki, and
A Masuda. An overview of vibration and seismic applications of niti shape
memory alloy. Smart Materials and Structures, 11:218-229, 2002.
[14] K. Tanaka.
A thermomechanical sketch of shape memory effects:
one-
dimensional tensile behavior. Res. Mech., 18:251-263, 1986.
[15] James A. Vandergrift, Anthony 0. DeRocco, Bard Glenne, and Shane M. K.
Sterling. Active piezoelectric damper for a snow ski or snowboard. United States
Patent, 6095547, August 2000.
[16] Antonio Vitiello, Giuseppe Giorleo, and Renata Renata Morace. Analysis of
thermomechanical behavior of nitinol wires with high strain rates. Smart Materials and Structures, 14:215-221, 2005.
[17] A J Zak, M P Cartmell, W M Ostachowicz, and M Wiercihroch.
One-
dimensional shape memory alloy models for use with reinforced composite structures. Smart Materials and Structures, 12:338-346, 2003.
143