Dynamic Characterization and Active Control of JL0RR12004 ES
advertisement

Dynamic Characterization and Active Control of
Unstarts in a Near-Isentropic Supersonic Inlet
by
OFTECHNOLOGY
4
JL0RR12004
Umair Ahsun
LIBRARI ES
B.Sc. Electrical Engineering, University of Engineering & Technology,
Lahore Pakistan (1996).
Submitted to the Department of Aeronautics and Astronautics in partial fulfillment of the
requirements for the degree of
MASTER OF SCIENCE in AERONAUTICS & ASTRONAUTICS
at the
MASSACHUSETTS INSTITUTE OF TECHNOLOGY
February 2004
© Massachusetts Institute of Technology 2004. All rights reserved.
Author
DepartmenterAepo'autics and Astronautics
27th January, 2004
Certified by
Dr. James D. Paduano
Principle Research Engier, Department of Aeronautics and Astronautics
i
Thl i S
es s upervsor
Accepted by
Y Edward M. Greitzer
H.N. Slater Professor of Aeronautics and Astronautics
Chair, Committee on Graduate Students
1
AERO
-
-r
Dynamic Characterization and Active Control of Unstarts in a
Near-Isentropic Supersonic Inlet
by
Umair Ahsun
B.Sc. Electrical Engineering, University of Engineering & Technology, Lahore Pakistan
(1996).
Submitted to the Department of Aeronautics and Astronautics
February 2004
in partial fulfillment of the requirements for the degree of
MASTER OF SCIENCE in AERONAUTICS AND ASTRONAUTICS
Abstract
A near-isentropic supersonic inlet, at Mach 2.2, has been designed to give enhanced
recovery and thus increased range for a supersonic transport aircraft. In such a design a
mixed compression inlet design is typically used. Enhanced recovery of 97% in total
pressure is achieved by reducing the unstart-tolerance of the inlet and by an efficient
boundary layer control mechanism. Thus the resulting inlet design has reduced stability
to unstart in the face of atmospheric and engine-born disturbances, necessitating active
control. An active stabilization bleed system is introduced that recovers the disturbancerejection capabilities required of modem inlets. The bleed system requires 4% steady
state bleed and up to 6% additional unsteady bleed for active stabilization. Two separate
physical mechanisms for unstart are identified, and active control algorithms to prevent
these forms of unstart are designed and demonstrated using quasi-i -D and 2-D unsteady
Euler simulations. The CFD codes used have been optimized for accurate propagation of
disturbances, to insure that physical mechanisms are correctly captured. The resulting
actively stabilized inlet can withstand worst-case empirically determined (by NASA)
atmospheric disturbances such as flight velocity, temperature, and angle of attack
perturbations consistent with atmospheric flight.
Thesis Supervisor: Dr. James D. Paduano
Title: Principle Research Engineer, Department of Aeronautics and Astronautics
3
Acknowledgements
The purpose of research is to learn new ideas and explore new frontiers. During my
research at Gas Turbine Lab I have learnt a great deal but in reality I have just started on
the road to explore new ideas. I want to acknowledge and thank my advisor Dr. James D.
Paduano for giving me the opportunity to work on this project and guiding me throughout
with patience and understanding. I would also like to thank him for reading my thesis
meticulously and making it more readable.
I would also like to thank Dr. Ali Merchant for his involvement in the development of
CFD design tools that were essential for the project. I would also like to thank Dr. Gerald
R. Guenette, Jr. for his suggestions during the experimentations.
In the end I would like to thank my wife Sarah and little cute son Arslan for their
understanding and patience.
Funding for this research was provided by DARPA under the MAFC program.
5
6
Contents
Abstract..............................................................................................................................
3
Acknowledgem ents ........................................................................................................
5
Contents .............................................................................................................................
7
List of Figures.............................................................................................................
9
List of Tables ...................................................................................................................
11
Chapter 1
Introduction.....................................................................................................................
13
Chapter 2
Atm ospheric Disturbance Characterization..............................................................
19
2.1
Atmospheric Disturbance Types and Scales...........................................................................
19
2.2
Atmospheric Disturbance Models ...........................................................................................
20
2.3
Transformation of atmospheric disturbances to Characteristic Canonical Form....................
21
2.3.1 Isothermal Horizontal Gust .....................................................................................................
23
2.3.2 Isothermal Vertical Gust .........................................................................................................
23
2.3.3 T emp erature G ust.......................................................................................................................
25
2.4
Spectra of atmospheric disturbances in Characteristic form....................................................
27
2.5
Non-dimensionalization of disturbance variables....................................................................
28
2.6
Modification of disturbance spectra by velocity hold and ramp control.................................
29
2.6.1 Estimate of the Attenuation due to Ramp Control System....................................................
29
2.6.2 Estimate of the Attenuation due to Velocity/Mach Hold System..........................................
30
2 .7
S u m mary .....................................................................................................................................
32
Chapter 3
Inlet Dynam ic Characterization .................................................................................
33
3.1
Unsteady Quasi-1 D Euler Simulation.....................................................................................
33
3.2
Frequency Response Study of the Inlet .................................................................................
35
3.2.1 Fast Acoustic W ave Perturbations (dJ+)...............................................................................
36
3.2.2 Shock Motion due to J+ Perturbations ....................................................................................
36
3.2.3 Slow Acoustic W ave Perturbations (dJ-) ...............................................................................
39
3.2.4 Shock Motion due to J- Perturbations ....................................................................................
41
3.2.5 Entropy Perturbations.................................................................................................................
41
3.2.6 Shock Motion due to Entropy perturbations ..........................................................................
42
7
3.2.7 Frequency Response Plots for Atmospheric Perturbations .....................................................
43
3.2.8 Upstream Bleed Perturbations................................................................................................
45
3.3
Effect of Back Pressure on Shock Location ..........................................................................
48
3.4
Constant Exit Pressure B. C. Assumption and its Implications on Shock Motion ..................
50
3.5
Constant Delay approximations of the Transfer Functions ....................................................
52
3.5.1 Transfer Function from Inlet dJ+ to Sensor and Throat ..........................................................
54
3.5.2 Transfer Function from Inlet dJ- to Sensor and Throat..........................................................
55
3.5.3 Transfer Function from Inlet Forward Velocity to Throat Mach Number ..............................
56
Unsteady 2D Euler Simulation ................................................................................................
58
3.6
3.6.1 Frequency Response Study of the 2D Inlet .............................................................................
58
3.7
Inlet Unstart Mechanisms.......................................................................................................
65
3.8
Bandwidth Requirement of the Actuators ...............................................................................
69
3.9
Throat Mach number Variations due to Characteristic Disturbances ....................................
69
Chapter 4
Control System Design and Testing ..............................................................................
73
Throat Mach Number Control ...............................................................................................
73
4.1.1 Throat Mach Number Controller Design Based on Atmospheric Disturbances ....................
74
4.1.2 Throat Mach Number Controller Design based on Characteristic Disturbances.....................
83
Shock M otion Control................................................................................................................
85
4.1
4 .2
Chapter 5
Summary, Results and Conclusions............................................................................
87
5.1
Some Time Domain Results ....................................................................................................
87
5 .2
C onclu sion s ................................................................................................................................
90
Appendix A
Code Listing for Constant Delay Approximation of the Transfer Functions ........
91
Appendix B
Gaussian Bump used as an Atmospheric Disturbance.............................................
95
References ........................................................................................................................
97
8
List of Figures
Figure 1.1: Total Pressure loss across a normal shock as a function of upstream Mach number.............. 13
Figure 1.2: Internal compression inlet with oblique shock waves............................................................
14
Figure 2.1: Forward velocity and temperature gust time histories and their spectra for an aircraft flying at
Mach 2.2 at altitude of 60000 ft. (Note that the worst case empirical values of e, 7x 10-, were used.)
.......................................................
22
Figure 2.2: Effect of forebody on the vertical gust..................................................................................
24
Figure 2.3: Atmospheric disturbance spectra in characteristic form. ......................................................
29
Figure 2.4: Closed loop bandwidth estimation for the velocity hold control system for a typical (39000 lb)
supersonic aircraft at Mach 2 at an altitude of 55000 ft.................................................................
30
Figure 2.5: Spectrum for forward gust velocity and its modification due to ramp control and velocity hold
system s................................................................................................................................................
31
Figure 3.1: 1D Simulink M odel of the inlet. ............................................................................................
34
Figure 3.2: Pictorial representation of inlet physical interface. ................................................................
34
Figure 3.3: Frequency response of the inlet J+ disturbance to throat Mach number. ...............................
36
Figure 3.4: Frequency response of the inlet J+ disturbance to sensor and throat J+.................................
37
Figure 3.5: Shock Motion as a function of frequency for J+ perturbation at the inlet lip......................... 37
Figure 3.6: Shock Motion for sinusoidal J+ perturbation at inlet lip........................................................
38
Figure 3.7: Frequency response of inlet J- to Mach No. at Throat and Sensor........................................
39
Figure 3.8: Frequency response of the inlet J- disturbance to sensor and throat J- ....................... 40
Figure 3.9: Shock Motion as a function of frequency for J- perturbations at inlet lip.............................. 40
Figure 3.10: Throat and Sensor Mach number as a function of frequency for inlet lip entropy perturbations.
(Sensor is located 0.5 inlet heights downstream of inlet lip). .........................................................
41
Figure 3.11: Inlet lip entropy perturbations to entropy perturbations at Throat and sensor (located at 0.5
inlet heights dow nstream of inlet lip)..............................................................................................
42
Figure 3.12: Shock Motion as a function of frequency for Entropy perturbations at inlet lip.................. 43
Figure 3.13: Frequency response of forward velocity to Mach number at throat.....................................
44
Figure 3.14: Vertical velocity to throat Mach number frequency response............................................
44
Figure 3.15: Temperature perturbations to throat Mach number frequency response..............................
45
Figure 3.16: Frequency response of the throat Mach for upstream bleed perturbations........................... 46
Figure 3.17: Upstream bleed perturbations to throat J+ variations as a function of frequency. ............... 47
Figure 3.18: Upstream bleed perturbations to throat J- variations as a function of frequency................. 47
Figure 3.19: Upstream bleed perturbations to throat Entropy variations as a function of frequency. .......... 48
Figure 3.20: Exit pressure to Shock Location transfer function. Magnitude is the percentage of the shock
movement of its distance from throat for 1% change in exit pressure from its nominal value. .......... 49
Figure 3.21: Dead band at DC, of shock motion, due to 1% and 2% bleed at nominal shock location........ 50
Figure 3.22: Shock motion due to J+ as function of frequency with no reflection condition at the exit
b ound ary . ............................................................................................................................................
51
Figure 3.23: Flow velocity and speed of sound from quasi- 1D simulation. The speed of fast and slow waves
as a function of inlet position is also shown....................................................................................
53
Figure 3.24: Time delays for fast and slow waves in the inlet..................................................................
54
Figure 3.25: Comparison of the numerical and constant delay TFs from inlet lip J+ to Throat J+
p ertu rb atio n s. ......................................................................................................................................
55
Figure 3.26: Comparison of the numerical and constant delay TFs for inlet lip J- to Throat Mach number
p ertu rb atio ns. ......................................................................................................................................
56
Figure 3.27: Comparison of constant delay approximation to the numerical TF from inlet lip forward
57
velocity to throat M ach num ber.......................................................................................................
Figure 3.28: Inlet lip dJ+ to area averaged throat Mach number transfer function and its comparison with
59
q u asi- D ca se .......................................................................................................................................
9
Figure 3.29: Inlet lip dJ+ perturbations to Throat Mach number perturbations and its variation along inlet
he igh t ..................................................................................................................................................
59
Figure 3.30: Inlet lip dJ- to area averaged throat Mach number transfer function and its comparison with
qu asi-ID case ......................................................................................................................................
60
Figure 3.31: Inlet lip dJ- perturbations to Throat Mach number and its variation along inlet height. .......... 61
Figure 3.32: Upstream bleed to area averaged throat Mach number transfer function and its comparison
w ith qu asi- ID case..............................................................................................................................
61
Figure 3.33: Transfer function from upstream bleed perturbations (using symmetrical bleed) to Throat
M ach number and its variation along inlet height..........................................................................
62
Figure 3.34: Transfer function phase from J+ perturbations to Throat Mach number and its variation along
62
inlet height. (Phase is shown unwrapped.)......................................................................................
Figure 3.35: Transfer function phase from dbl perturbations to Throat Mach number and its variation along
inlet height. (Phase is shown unwrapped.)......................................................................................
63
Figure 3.36: Transfer function from upstream bleed perturbations (using bottom bleed valve only) to Throat
64
M ach number and its variation along inlet height..........................................................................
Figure 3.37: Transfer function from inlet lip Entropy perturbation to area averaged throat Mach number
64
transfer function and its comparison with quasi-ID case.................................................................
Figure 3.38: Transfer function from inlet lip Entropy perturbations to Throat Mach number perturbations
and its variation along inlet height ..................................................................................................
65
Figure 3.39: Mach number profiles for different time instants during an unstart event. The shock is moving
towards the inlet lip due to an incoming atmospheric disturbance. Unstart due to shock motion....... 66
Figure 3.40: Location of the shock as a function of time for the unstart event due to shock motion. .......... 66
Figure 3.41: Mach number profiles for different positions of the shock. Shock is moving towards the inlet
lip due to incoming atmospheric disturbance. Unstart due to new shock forming at throat. .......... 67
Figure 3.42: Location of the first shock as a function of time for the unstart event due to shock motion.... 68
Figure 3.43: Contours of Mach number for the unstarting inlet due to new shock formation.................. 68
Figure 3.44: Throat Mach no. perturbation spectral density for (worst case) J+ disturbance at the inlet
70
upstream boundary..............................................................................................................................
Figure 3.45: Throat Mach no. perturbation spectral density for (worst case) J- disturbance at the inlet
71
upstream boundary..............................................................................................................................
Figure 3.46: Throat Mach no. perturbation spectral density for (worst case) Entropy disturbance at the inlet
71
upstream boundary..............................................................................................................................
Figure 4.1: Feed-forward control law architecture, for throat Mach number control, based on Mach number
74
estim ation at the sensor.......................................................................................................................
76
.........
inlet.
the
along
locations
sensor
Figure 4.2: The sensitivity of the static pressure sensor at different
78
Figure 4.3: Frequency response of the feed-forward controller and its realizations................................
78
Figure 4.4: Pole-zero diagram for the discrete feed-forward controller. .................................................
79
Figure 4.5: Step response of the discrete feed-forward controller............................................................
79
Figure 4.6: Controller effectiveness for changes in throat Mach number and pressure............................
Figure 4.7: Controller effectiveness for changes in throat Mach number due to vertical velocity
80
perturbations (dv) and temperature perturbations (dT)...................................................................
Figure 4.8: PSD of throat Mach number variations with control and without control for forward velocity. 81
Figure 4.9: PSD of throat Mach number variations with control and without control for up velocity. ........ 81
Figure 4.10: PSD of throat Mach number variations with control and without control for temperature...... 82
Figure 4.11: Feed-forward control law architecture, for cancellation of slow acoustic waves at the throat,
83
using the characteristic disturbance estim ation...............................................................................
84
Figure 4.12: Detection of slow acoustic waves using four static pressure sensors..................................
85
Figure 4.13: Shock position control using shock location feedback..........................................................
Figure 5.1: Time response, using quai-l D simulation, of the inlet to a Gaussian bump perturbation in the
88
forw ard v elocity ..................................................................................................................................
Figure 5.2 Time response, using ID simulation, of the inlet to a typical atmospheric gust in forward
88
velocity, w ith and w ithout control. ..................................................................................................
Figure 5.3 Time response, using 2D simulation, of the inlet to a typical atmospheric gust in forward
89
velocity. Note that area-averaged values of the variables are shown..............................................
10
List of Tables
Table 1.1: Concord supersonic transport aircraft performance sensitivity to changes in inlet pressure
recovery and aircraft drag. ..................................................................................................................
Table 3.1: Estimated RMS values for throat Mach number variations due to canonical atmospheric
d istu rbanc e s. .......................................................................................................................................
Table 4.1: RMS value of throat Mach number variations with control and without control. ...................
11
15
70
82
12
Chapter 1
Introduction
The purpose of an aircraft inlet is to act as an interface between the free stream and the
engine compressor. In supersonic airbreathing engines flying at cruise conditions, the
inlet decelerates the free stream flow from flight Mach number to a Mach number
required at the face of the compressor, recovering the energy in the form of increased
pressure. Most compressors, in a supersonic propulsion system, require a flow at their
face at around Mach 0.5. Since the flow decelerates from supersonic to subsonic, a
normal shock is formed somewhere in the diffuser section of the inlet (where the flow
Mach number crosses the value of 1). If the normal shock is formed outside the inlet then
the inlet is called an external compression inlet, while if the normal shock is formed
inside the inlet, behind the throat, then this type of inlet is called an internal compression
inlet. A high efficiency inlet supplies the air to the engine, at the required operating
conditions, with the minimum possible loss. The efficiency of the inlet is generally
measured in terms of its total pressure recovery. Total pressure recovery is defined as the
ratio of the total pressure at the face of the compressor (at some suitably defined point or
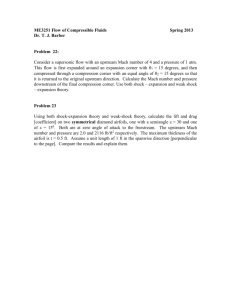
average value) to the free stream total pressure. In a supersonic inlet the major sources of
total pressure loss are the normal shock and the boundary layers. The total pressure loss
across a normal shock wave as a function of upstream Mach number is shown in Figure
1.1 [4].
90 k
70
C)
I
I
t
I
I
I
I
I
I
I
I
I
I
r
r
-
I
I
4I
-
60
I
I
I
I
-a
50k
-
-
I
-- I
/
/
-'
-I
I
I
1I
----
----
-
L
-
-
L
40
17
4-------4
In
In
-
/----
-
,1
/
I
I
i
I
I
I
1~'-------1
30-
F
------
A'
------
I
20--
7 /
10
-4
O'L
1
1
1.5
1.5
2
2
2.5
2.5
3.5
3
3
3.5
Upstream Mach No.
4
4
45
4.5
5
5
Figure 1.1: Total Pressure loss across a normal shock as a function of upstream Mach number.
13
Figure 1.1 shows that for low supersonic speeds an external compression inlet may give
satisfactory performance as the total pressure loss is low, but for inlets flying at
supersonic speeds above Mach 2.0, an internal compression inlet design gives better
efficiency as compared to an external compression inlet as explained in the following
paragraphs.
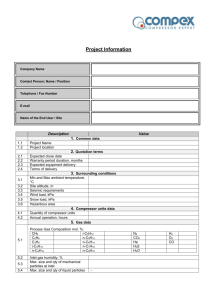
A near-isentropic supersonic inlet can be designed, using internal compression, by
gradually slowing down the incoming flow through a series of oblique shock waves and a
weak terminal normal shock just behind the throat [20]. With such a design one can
achieve a total pressure recovery as high as 97%. The flow structure in such a design is
shown in Figure 1.2.
Contours of Mach No.
1.5 -
0.5
05
1
1
1.5
2
25
3
3.5
4
4.5
5
5.5
3
3.5
4
4.5
5
5.5
X
0.5
L -/7-/-
.ZI
1
0
i
- -I
0.5
1
1.5
2
2.5
x
Figure 1.2: Internal compression inlet with oblique shock waves
With such a design the length of the inlet cannot be too small, as the flow has to
decelerate gradually. This has implications for the growth of boundary layer losses.
Specifically, although we can minimize the loss through the terminal normal shock, since
it is weak, we get an increased boundary layer loss instead. It is clear that there is a tradeoff between the loss in pressure recovery through the shock system and loss through the
boundary layer growth. In order to minimize both, Merchant [2] carefully placed bleed
valves at key locations in the inlet. The boundary layer growth is managed with the help
of bleed valves situated at these locations. These valves bleed the air at the walls of the
14
inlet and prevent the boundary layer from growing. In this way we can achieve nearisentropic compression if we assume that we can dump the boundary-layer management
bleed over-board with zero loss. But in practice this cannot be done ideally, and there is
always some loss associated with bleed flow in the form of increased inlet drag. Thus
from the system point of view there is a trade-off between pressure recovery and inlet
drag, i.e. we can achieve near ideal pressure recovery but at the expense of increased inlet
drag. In order to quantify these two parameters, data for Concord is shown in Table 1.1
[19] (this table gives the inlet efficiency in terms of the total pressure recovery and the
aircraft drag includes the drag contributed by the inlet). From this table it is clear that in
order to achieve higher performance of the propulsion system, a high inlet efficiency
coupled with a low drag is required. A high efficiency inlet would be one that not only
has high pressure recovery, but also uses as low bleed as possible to achieve high
recovery.
Reduction of Payload (%)
Aerodynamic Loss
1% inlet efficiency (subsonic)
1
1% inlet efficiency (supersonic)
1% aircraft drag (subsonic)
2.5
1
1% aircraft drag (supersonic)
4.5
1% inlet efficiency (take off)
5
Table 1.1: Concord supersonic transport aircraft performance sensitivity to changes in inlet pressure
recovery and aircraft drag.
Internal compression inlet operation is strongly affected by atmospheric disturbances as it
has a 'bi-stable' operation. In the 'started' condition, the normal shock sits behind the
throat as shown in Figure 1.2. Atmospheric disturbances can cause the normal shock to
move upstream in such a way that it can even come out of the inlet completely, forming a
bow-shock wave [1]. This shock blowout event is known as inlet unstart and results in a
severe increase in aircraft drag; the mass flow through the inlet may also decrease below
the engine's requirements and the engine itself may surge or shut off [2]. In order to
'start' the inlet again, one needs to suck the external shock and move it downstream
behind the throat, where it remains in a stable condition in the absence of external
disturbances. For this starting action one needs variable inlet geometry as discussed later
in this chapter.
We can define the unstart tolerance of the inlet as the magnitude of the disturbance that
can be tolerated without unstart. In other words, an inlet that has higher unstart tolerance
is more robust in the face of disturbances. There is a tradeoff in inlet operation between
robustness and efficiency (in terms of total pressure recovery) [3]. For a supersonic
diffuser, behind the throat the flow re-accelerates to higher Mach numbers as given by
the area velocity relationship for a converging diverging duct [4]:
15
dA =(M
A
(1.1)
- 1)
u
Here A is the cross-section area along the inlet, M is the Mach number and u is the flow
velocity. Equation 1.1 shows that, for a positive change in the area the change in the
velocity is also positive for supersonic Mach numbers. Therefore, if the normal shock
forms farther down the throat then it will be stronger (i.e., it goes subsonic from a higher
value). For stable operation, the throat Mach number must be greater than one. If the
throat Mach number is exactly one, then the flow downstream of the throat will be
subsonic and there will be a very weak shock standing at the throat. This flow condition
is marginally stable, as even a very small disturbance can move the shock either
downstream or upstream. If the shock moves upstream then it enters the unstable region
and it would continue to move upstream until the inlet unstarts. Combining this
requirement with equation 1.1 we see that:
1 < Mthroat < Mshock
(1.2)
From the discussion in the above paragraph, it is clear that a shock placed farther
downstream of the throat is more immune to disturbances as compared to a shock placed
nearer to the throat. Increased efficiency is achieved (at the expense of decreased
robustness) with the normal shock closer to the throat. In this case the normal shock is
very weak, consequently minimizing the losses across the shock. Similarly we can
enhance the unstart tolerance, and inlet robustness, by placing the shock a bit farther
downstream of the throat; in this case, however, we get a stronger shock resulting in
increased pressure loss and lower efficiency. So it is clear that one can achieve enhanced
recovery but at the cost of reduced inlet robustness. Therefore normal operation of the
enhanced recovery inlet requires active stabilization during the cruise conditions to
achieve an acceptable level of unstart tolerance.
In the design of an inlet, for the purpose of supplying air to the engine, the designer is
primarily concerned with the properties of the internal flow such as mass flow, pressure
recovery, static and dynamic distortion, flow angularity and flow stability [19]. For
mixed compression inlets, the most important dynamic characteristic is the robustness of
the shock system inside the inlet as discussed above. In order to achieve the required
performance and robustness one has to vary the throat area of the inlet for different flight
conditions while the overall structure of the inlet is optimized for the cruise conditions. In
current supersonic internal compression inlet designs, the "operating point" of the inlet is
varied with the help of a translating center body or mechanical system, called "ramp
control". The ramp control is also required for "starting" the internal compression inlet as
discussed earlier. It should be noted that bleeds are used only for boundary layer
management and shock control, to reject disturbances in steady-state, and are not
currently used for the atmospheric disturbance rejection in an unsteady fashion. The
translating center body has large inertia; therefore if the inlet encounters a large
atmospheric gust then the ramp control system cannot react in time to avoid unstart. This
16
means that during the cruise condition, where a transport aircraft engine operates most of
the time, the operating point of the inlet has to be adjusted such that the terminal normal
shock is placed sufficiently behind the throat to give acceptable level of unstart tolerance.
Therefore, the inlet has to operate with a lower pressure recovery to account for the
atmospheric gusts that are normally encountered during a flight.
This thesis suggests a control system on top of the "ramp control" to allow the designer to
reduce the uncontrolled unstart tolerance further to achieve near isentropic operation of
the inlet. The reduced static margin for unstarts is accounted for by the dynamic rejection
of the atmospheric disturbances with the help of an active bleed control system.
In order to design an effective inlet stabilization control system we need to quantify the
dynamic behavior of the inlet in the face of atmospheric and compressor disturbances.
For that a quasi-ID and a 2D inviscid Euler simulations of the inlet were prepared by Ali
Merchant [2] and integrated into Matlab and Simulink. The Euler simulation uses
numerical solvers utilizing a second-order accurate finite-volume scheme for spatial
discretization. Stabilization and shock capturing are enabled using Roe's scheme. A four
stage Runge-Kutta method is used to time march the solution. Boundary conditions are
applied using Riemann invariants. With the help of these tools we can model the dynamic
behavior of the inlet quite accurately for the design and analysis of a control system.
During normal operation, many mechanisms such as aircraft maneuvers, back pressure,
engine transients etc. can cause the inlet to unstart, but atmospheric disturbance is the
least controllable and least predictable; therefore it is the most important factor in
avoiding inlet unstarts [3]. To study the effectiveness of the control system we need to
quantitatively express the worst-case atmospheric disturbances. A detailed study of
atmospheric turbulence models was conducted as part of this work and worst-case PSD
(Power Spectral Density) estimates were generated for inlet cruise conditions. The study
of the atmospheric disturbances is important for a realistic evaluation of the performance
of the inlet. The reason being that, the inlet itself does not dictate the bandwidth
requirements for the control system. The inlet passes some of the disturbances unattenuated even for higher frequencies. Thus it is the spectrum of the atmospheric
disturbances that sets the bandwidth requirements for the actuators and controller.
This thesis presents a systematic way of predicting the dynamic behavior of a highrecovery supersonic inlet. Using the dynamic behavior, control schemes are presented
that can be used to increase the robustness of the inlet in the face of atmospheric
disturbances. In order to achieve that effectively, in chapter 2 of the thesis, we discuss
different atmospheric disturbances and their characterization as applicable to our system.
In chapter 3 we discuss dynamic characterization of the inlet itself. Different unstart
mechanisms are also discussed. Different transfer functions for both 1D and 2D models
are calculated and compared. In chapter 4 we discuss different control architectures for
the stabilization of inlet. Chapter 4 also gives the results for the implementation of the
control laws and their quantitative assessment in enhancing the inlet robustness. Finally
chapter 5 provides some time-domain results and conclusions.
17
18
Chapter 2
Atmospheric Disturbance Characterization
As discussed in chapter 1, the bandwidth requirements of the inlet are not dictated by the
inlet itself (that this is the case will be shown in chapter 3). This means that we have to
look at the spectrum of disturbances affecting the inlet to find out the bandwidth
requirements of the control system and actuators. Many different types of disturbances
such as aircraft maneuvers, back pressure, engine transients etc. can cause the inlet to
unstart but atmospheric turbulence is the least controllable and least predictable and
therefore it is the most important factor in avoiding the inlet unstarts [3]. In this thesis we
are not considering the downstream disturbances generated by the compressor; instead
we concentrate entirely on the atmospheric disturbances.
2.1 Atmospheric Disturbance Types and Scales
Supersonic airplanes may encounter atmospheric turbulence comprised of four
components: the three components of velocity and temperature. There is also pressure
turbulence but it is related to velocity perturbations via the momentum equation, so we
can eliminate it. In order to have a realistic study of the effects of atmospheric
disturbances on the inlet, we need to express the disturbances in some quantitative form.
Atmospheric disturbances come in all sizes, from the macroscale (sizes greater than a few
hundred kilometers) through mesoscale (from a few hundred km to tens of km) to
microscale (tens of km to a few cm) [5, 6]. By "scale" we mean the horizontal distance
over which the disturbance parameter, say velocity, changes by its own order of
magnitude. For the purpose of quantitatively expressing the disturbances we can treat
them as quasi-steady, since the change in the atmospheric disturbance properties takes
place at a very slow rate and the aircraft is flying at a high Mach number. This means that
as the airplane is flying through the disturbances, we can treat them to be stationary for
an observer not moving w.r.t. the atmosphere. Therefore, for an observer sitting on the
airplane, moving with a true air speed U, the atmosphere presents different turbulence
lengths from a few hundred km down to a few cm, corresponding to different spatial
wavelengths. Under this "frozen field" assumption we can convert between spatial
wavelengths or corresponding wavenumbers to temporal frequencies using the following
relationship:
f
=
True Air Speed in m/s
Spatial Wavelength in m
-
U
-
A
Ma
=A
kMa
(2.1)
Here M is the flight Mach number, a the local speed of sound in m/s and k is
wavenumber in cycles/m.
19
We will be interested primarily in mesoscale and microscale disturbances as the
macroscale disturbances are adequately handled by the flight control and ramp control
systems as discussed in the following sections.
2.2 Atmospheric Disturbance Models
Assuming the disturbances to be stationary, as discussed above, we can describe the
atmospheric disturbances statistically in terms of their power spectral density (PSD)
functions. In the micro and meso-scales the 3D turbulence is isotropic and we can use the
Kolmogorov's spectrum for turbulence modeling [6]. A brief review of Kolmogorov's
theory and its application to atmospheric turbulence is given in this section.
From the first law of thermodynamics we know that the total energy of an isolated gas
volume remains constant over time. But the total kinetic energy of the turbulent eddies of
an isolated gas decreases with time due to viscous dissipation. Hence a turbulent fluid can
be maintained in steady state, in the kinetic sense, only if the energy injection rate equals
the rate of dissipation.
Kolmogorov's theory is based on the notion that large eddies in a turbulent gas can feed
energy to the smaller eddies, which in turn feed energy to smaller scales, resulting in a
cascade of energy from the largest eddies to the smallest ones. That this notion is true can
be seen from the fact that large eddies of size say 1 have large Reynolds number lV/v
where V is the typical velocity associated with the eddy (which may be small but / is very
large). This large Reynolds number allows us to treat this flow as inviscid and from an
application of Kelvin's vorticity theorem [7] we see that vorticity is conserved across
different scales and thus we can imagine different fluid elements "carrying" the vorticity
to smaller dimensions. For very small eddies the Reynolds number becomes small and
thus viscous dissipation occurs at very small scales, resulting in the loss of kinetic energy.
Thus according to Kolmogorov's theory an isolated turbulent gas would have an energy
dissipation rate, c, called the eddy dissipation rate, per unit mass per unit time (having
units of energy/(mass x time) = M 2 / S3) in order to maintain equilibrium. Kinetic energy
does not build up at any scale and the intermediate eddies merely transmit this energy e to
the smaller scales to be dissipated there. From the above discussion we see that the
concept of energy cascade is applicable to some range of wavenumbers between very
large eddies and some small eddy scale. Within this range of wavenumbers, called the
inertial subrange, the energy is transferred to smaller eddies without dissipation and
hence total energy remains constant. Using this constraint of constant energy and a
constant eddy dissipation rate e, of transport of turbulent kinetic energy from smaller
wavenumbers to higher wavenumbers, for an isotropic turbulence, we can show using
dimensional analysis that the power spectral density of atmospheric turbulence is given
by [6]:
S, (k) = a,e2/ k-5!3
20
(2.2)
Where the subscript t denotes the type of disturbance being modeled. The coefficient a, is
a constant for each type of disturbance and given by:
a= 0.15
a= 0.2
aT= 0.39
ap= 0.0005(po/To) 2
(longitudinal wind velocity gust, dimensionless)
(vertical or horizontal wind velocity gust, dimensionless)
(temperature disturbance, 'K2 s2 m-2 )
(pressure disturbance, Pa 2 s 2m 2)
Note that these values of the coefficients a, and e are determined experimentally using a
large number of actual wind gust measurements as described by [6].
Data indicate that the -5/3 law spectral behavior, described above, extends uninterrupted
to an outer scale disturbance wavelength of around 400 km [5]. This means, for a study of
the effect of atmospheric disturbances on inlets only one parameter, i.e., e the eddy
dissipation rate, sets the spectral intensity over the entire frequency range of our interest.
The eddy dissipation rate is a function of terrain, altitude, latitude and different times of
the year. A typical value for e is 2.0 x 10-5 m2 s-3 and can vary by as much as a factor of
10.
Using the given model spectra for different atmospheric disturbances we can use the
Fourier Series method for the generation of random time series that have the same spectra
as those of atmospheric disturbances [8]. Using the turbulence model developed by
William Tank [6], as described above, a code was developed at UTRC [21], which
simulates such time histories of the atmospheric turbulence. This code allows one to
adjust different parameters (as given above) in the atmospheric turbulence model such as
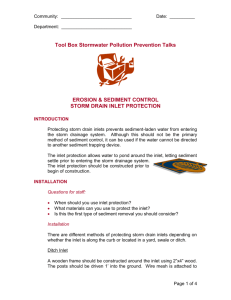
eddy dissipation rate, flight speed etc. A typical output of the code, along with the
relevant spectra, is shown in Figure 2.1. This figure shows the spectra for forward or
longitudinal velocity gust and the temperature gust. The time histories of the gusts are
also shown in the figure. These time histories are generated by the code for the worst case
setting of the eddy dissipation rate, e. Gust histories such as those shown in the Figure 2.1
will be used for the time-domain testing of control algorithms in chapter 4 and 5. For
frequency domain studies analytical spectra, such as those denoted as "model", will be
used in chapter 3 and 4.
2.3 Transformation of atmospheric disturbances to
Characteristic Canonical Form
From the discussion in the previous section it is clear that the atmospheric disturbances
can be broken down into three types for our purposes:
1. Forward velocity disturbances.
2. Vertical velocity disturbances.
3. Temperature disturbances.
21
These disturbances in the atmosphere appear at the face of the inlet and travel down the
inlet as three distinct modes, namely a fast acoustic wave J+, a slow acoustic wave J- and
Longitudinal gust
2
Temperature gust
102
10 Random signal PSD
Model
------------
----
N
-
0
---
10
-
- -
Random signal PSD
Model
--------
0)
a)
N
10a
100 -
4, 10-2
C,
- ---
- -
- ----
C
a)
0,
-2
Co)
10-6
100
102
100
102
100
freq Hz
freq Hz
10r
E
C
5
0
0)
E
6)
-5
-J
1
Time (sec)
1
Time (sec)
2
Figure 2.1: Forward velocity and temperature gust time histories and their spectra for an aircraft flying at
Mach 2.2 at altitude of 60000 ft. (Note that the worst case empirical values of C,7x10-5, were used.)
an entropy disturbance. We can represent each of the atmospheric disturbances as a
combination of these 'canonical' or characteristic forms, namely J+, J- and entropy. Each
of the canonical disturbances can be regarded as a fundamental mode of the disturbance.
Therefore, from the standpoint of control system design, these modes are to be controlled
or rejected for the stabilization of inlets.
One comment is needed here about the canonical form of the disturbances: these
canonical forms are not really independent of each other, e.g., if we have an entropy
perturbation at the face of the inlet then it will also result in variations of J+ and J- in the
inlet. This can be seen from Equations (2.3) and (2.4), below, as a coupling between
speed of sound change and J+ and J-. Therefore these are not really independent modes
of the disturbances. But still studying the inlet response to disturbances in canonical form
reveals very useful information as discussed in chapter 3 and we can even implement a
control law based on canonical form as described in chapter 4. The reason being that the
coupling between different modes is relatively weak as the rate of travel of each
disturbance is different, so from the point of view of control law design these modes are
fairly decoupled and we can treat them as independent modes of the disturbances. From
22
this discussion it is clear that it would be useful to transform the atmospheric disturbances
to these characteristics canonical disturbances for the study of control law design.
We will break the atmospheric disturbances into three independent parts:
* Isothermal Horizontal Gust Au.
* Isothermal Vertical Gust Av.
* Temperature Gust AT.
For a calorically perfect gas the Riemann Invariants, J+ and J-, along the characteristic
lines are defined as [4]:
J+= U+ 2a
y -1
2a
J-= u -
(2.3)
(2.4)
Here u is forward velocity, a is speed of sound and y is the ratio of the specific heat at
constant pressure and specific heat at constant volume, i.e., y=cp/c,.
Let us define the entropy as:
s = pv,
(2.5)
where p is the pressure and v is specific volume i.e., volume per unit mass.
2.3.1 Isothermal Horizontal Gust
For an isothermal horizontal gust Au we have only forward velocity perturbation and
from Equations 2.3 to 2.5 we obtain:
AJ+ = Au
AJ- = Au
(2.6)
As = 0
2.3.2 Isothermal Vertical Gust
If we have an isothermal vertical gust without any forebody (i.e., no fuselage above or
below the inlet) then the vertical gust simply transforms into an angle of attack change.
But if a forebody is present, as it is in our case, whether above or below (Figure 2.2), the
flow in front of the inlet is turned onto itself, isentropically, through a series of weak
oblique shocks. Thus a change in vertical velocity is transformed into a change in
forward velocity. Note that, due to the presence of the forebody, the vertical velocity of
the flow cannot change due to the boundary condition imposed by the forebody.
23
AW
U00
Cr
Figure 2.2: Effect of forebody on the vertical gust.
From the Prandtl-Meyer wave relation [4] we can write for a turning flow through a
compression wave:
-AO
Au
Uco Mcj
(2.7)
I
Here A0 is the flow turning angle which would equal the change in the free stream flow
direction due to the vertical gust given by:
Av
(2.8)
AO -U00
From equations 2.7 and 2.8 we get the change in the forward velocity due to an
isothermal vertical gust as:
Av
Au ~
(2.9)
Mc: -1
Since the vertical gust velocity is very small as compared to the forward free stream
velocity, the turning angle would also be very small. Also, for smooth turning the oblique
shocks are vanishingly weak and we get isentropic compression. For an isentropic
compression we have a constant total enthalpy H across the compression. Thus:
(2.10)
H =h+-u2 = Hoc
2
The speed of sound a is related to static enthalpy h as:
2
(2.11)
h= a
y -1
Combining Equations 2.10 and 2.11 with 2.9, for small perturbations Au we obtain:
24
1
Aa;z
2
m
IMc-1
Av
(2.12)
hence the characteristics variables become:
Aj+ - (Mo -1) AV
Mj -1
AJ-
(M + 1) Av
M-1
(2.13)
As = 0
Note that these relations are accurate only for small vertical velocity perturbations, which
is necessarily the case in atmospheric disturbances.
2.3.3 Temperature Gust
A temperature gust AT is the same as a speed of sound change for and ideal gas. We can
write:
Aa = YRAT
(2.14)
2a
For a temperature gust the forward velocity perturbation would be zero and combining
Equation 2.14 with Equations 2.3 and 2.4 we get:
AJ+ =
(7J
-)a
yR
AT
( ,y
AJ-
=-
(y -1)a.
I~ a .(2
.15 )
AT
From the definition of the entropy (Equation 2.5) we obtain for a pure temperature gust
(the pressure is constant),
As = ypvd Av
(2.16)
a 2 =7RT = ypv
(2.17)
Combining Equations 2.17 and 2.11 we get:
Av= Y
NP.
Ah=
~1 cAT
7POO
25
(2.18)
From Equations 2.18 and 2.16 we obtain finally:
As =
yR
p00
(2.19)
AT
We can write the transformation from the atmospheric disturbance variables to the
characteristic variables in matrix form as follows:
AJ -S
yR
Moo-1
-Mi-1
1
-)au~
(~y-
AV
-
= 1
(yR Ia -
-_
yR
0
0
(2.20)
A-1
For a full scale inlet flying at 60,000 ft with a speed of Mach 2.2 in standard atmosphere,
we get the above transformation matrix in SI units as:
AJ As
0.6124
3.4046
Au
- 0.6124
- 3.4046
Av
1
AJ +
=
936.11 ][AT]
0
0
(2.21)
For the Euler simulation of the inlet we assume a stagnation speed of sound and
stagnation density of 1.0 (for normalization purposes), thus the transformation matrix for
the simulation becomes:
AJ+
0.0024
0.0015
AJ-
=0.0024
-0.0039
LAs
0
0.0082 ~ Au
-0.0082
Av
(2.23)
0.0046 _ _AT_
0
Here the transformation matrix is scaled such that the characteristic disturbance variables
are non-dimensional while the atmospheric disturbance variables are dimensional, i.e.,
the non-dimensionalization factor is included in the transformation matrix (2.23).
26
2.4 Spectra of atmospheric disturbances in Characteristic
form
In order to find the spectra of atmospheric disturbances in characteristic form we see that
any disturbance in characteristic form is a linear combination of forward velocity, vertical
velocity and temperature disturbances, e.g., in the case of J+ we get:
AJ+ =
p,3Au + fl,Av+ pTAT
(2.24)
Where the scaling coefficients, p's, are given by the transformation matrix. The spectra
of J+ in terms of spatial wavenumbers is given by definition as:
S,,(k)= f R,,(l)e
2
'i
t*Idl
(2.25)
Where Rj+(l) is the spatial autocorrelation function of J+ disturbance given by:
R1 , (1) = (AJ+ (x)AJ' (x +1))
(2.26)
Here ( ) denotes the expectation. Assuming that the expectations of the products of
forward velocity with other disturbances is zero or in other words the atmospheric
disturbances are independent of each other, the autocorrelation function for J+ reduces to:
2
R1 , (1) = fu 2 Ru (1)
+ ,|R,
(1)
+ 8T 2 RT (1)
(2.27)
From the above it is clear that the spectrum of J+ disturbance is given by:
S,,(k)
=
,8u2S(k)+/|
2
S,(k)+&
2
ST(k)
(2.28)
Since all the spectra have the same relationship with only the scaling coefficient different
as given by Equation (2.2), we can write the above expression in a more compact form as:
SJ,(k) = aj+s2/k-5
(2.29)
Where the coefficient is given by:
a-, =
p
2
a, +
a,+ pr2 aT
Similarly we can define the spectra for J- and entropy s.
27
(2.30)
2.5 Non-dimensionalization of disturbance variables
We can convert a quasi-steady spatial disturbance to temporal disturbance for an aircraft
flying at some Mach number M using relation (2.1). Suppose that we want to test a scaled
version of an inlet at some different local conditions. For that we need to nondimensionalize all the variables so that we can have a correspondence between different
scales and test conditions. To non-dimensionalize length we use inlet height H, for speed
we use local stagnation speed of sound ao. Thus for time the factor is ao /H. We can nondimensionalize the frequency as follows:
dimension - less wavelength =
A
H
=
Ma
fH
Ma0
,ao
f = A*H
(2.31)
Thus we can relate the frequency of disturbance as seen by the full-scale inlet to some
scaled experimental inlet using the above relationship as follows:
fim = ff, aosim H full
a 0 full
(2.32)
H,,,
Here fan, is the actual frequency of disturbances as seen by a full-scale inlet while fsim is
the reduced frequency for the scaled inlet of height Hsim used in the simulation or
experiments.
To non-dimensionalize temperature we use the relationship:
2
(2.33)
TO = ao
7R
Where R is the universal gas constant and To is the local stagnation temperature. Thus for
the simulation we get:
2
(2.34)
aosim
= Tomi
Tos,,Osim
O
full
The atmospheric disturbance spectra in the characteristic form are shown in Figure 2.3
after scaling the actual disturbance velocities and temperature.
28
2-
10
10
J+ (dotted)
.2 10
10
E
101
0
-6
-14
2
-7
10
Atmospheric
controy
iurnes
havin
vtopery itrarge waveegths
cactesi
in
fmacocl.
ein
a
exhibit large variations in gust velocities as discussed previously. From the point of view
of inlet control we can assume that these large scale disturbances (> 6-20 km or
frequencies below 0.03 to 0.1 Hz) will be absorbed by the aircraft velocity hold system.
We also require a ramp control system in the inlet as discussed in chapter 1, which can
modify the area properties of the inlet depending on the engine demand and atmospheric
turbulence to avoid the unstart. Thus the inlet control system will see the atmospheric
disturbance spectra attenuated by the vehicle velocity hold system and the inlet ramp
control system.
2.6.1 Estimate of the Attenuation due to Ramp Control System
We assume a second order closed-loop response of the ramp control system with a slew
rate of 60 deg/sec. Assuming a transfer function of the ramp control from the atmospheric
disturbances to the throat Mach number as a second order system given by:
29
GR (S)
s2
S2
(2.35)
+0.8376s +1.0962
Where the natural frequency is 1.047 (corresponding to a slew rate of 60 deg/sec) and
damping ratio is assumed to be 0.4. Thus we see that the ramp control system acts as a
high pass filter and attenuates the larger scale disturbances.
2.6.2 Estimate of the Attenuation due to Velocity/Mach Hold System
To get a quick estimate of the closed loop performance of a typical velocity/Mach hold
system for the class of aircraft we are interested in, the data from [9] of a supersonic
aircraft in the same weight class was used to estimate the velocity hold cutoff at around
0.33 rad/s (corresponding to a closed loop settling time of 15 sec giving an approximate
time constant of 3 sec). For simplicity a full state feedback LQR controller was designed
to get the step response in forward velocity as shown in Figure 2.4.
Closed Loop Step Response (Step Change in Forward Velocity)
10
42
0
'2
0L
Time (sec)
2
2
0
1.5
- ----
I
-
1
0
-- - -
0.5
W
a
--
0
4 50
1
2
3
4
5
Time (sec)
6
7
8
9
10
Figure 2.4: Closed loop bandwidth estimation for the velocity hold control system for a typical (39000 lb)
supersonic aircraft at Mach 2 at an altitude of 55000 ft.
Assuming a dominant first order closed loop transfer function from atmospheric
disturbance to forward velocity:
30
s
G, (s) = +
s +0.33
(2.36)
Using these transfer functions we can modify the spectra of atmospheric disturbances
according to the following relationship [10]:
SO, (s) = G(s)|2 S, (s)
(2.37)
Where Sin(s) is the input spectrum to a system with transfer function G(s) and Sow(s) is
the spectrum at the output of the system. A modified spectrum for the forward gust is
shown in Figure 2.5.
i0
3
1 I---
I
I
Ili
111I
11|l
I1[lilt
1 1
I
1i
I
I
14I
I
With Ramp Control
-- With Ramp+Vel hold
I I
I i i i fiV-'tL
I i I | ii
11111
|1 I
|1 -I Jicld
I
I
1
Il1
I I 11 1 1
I
1IIl
Original PSD du
I
l
1
101
:V
E
10-1
rr r-r--r
~~~~~~~~~~~~~~~~~
111111
I
-- --IIII Iii
I
(0
I i iI lit
I
I
I
*
II
lil
f
uI ll
I1111
10-3
*
-3
10
I
i
1
I
I 1
I
l1111
1
L 111
lI
10'2
|
i1
1
11
1
l
rn
-I
- --
1
111I
I I
I 111111li
I
I
I
1111I|||
II
I
I
I
I1
|
I11
i
I1
1r
I
r-
,-r
I
I
I
1l
I
11
i
I
1 I1111 1i
10-1
100
n
rr 11111
--I
-, I
iill
1111
11
|
1
I
|
I I
i i
lI
[1l1 I
I
I|
i
-- rI
-1Ilil
I1I111i
1 1111II
|1
I1i
I
101
I
1
1
I
r1
I I
I
il
1111
l iI II
-r,I
I
|I
|
I1l
iI
111
|
|
I
I
1
I
11
117111
- ||
|
102
Frequency (Hz)
Figure 2.5: Spectrum for forward gust velocity and its modification due to ramp control and velocity hold
systems.
From this modified spectrum we can calculate the maximum frequency of interest for the
inlet disturbance rejection control system. This maximum frequency is calculated as that
frequency which gives 99% of the spectral energy. For this particular spectrum it turns
out to be approximately 18 Hz. Thus frequencies up to 18 Hz contribute 99% of the
energy in the disturbance while higher frequencies only contribute the remainingl%. So
from the point of view of the inlet control system we need only consider frequencies up
to 18 Hz. Also as can be seen from the modified spectrum on the lower side, the
31
frequencies below 0.01 Hz are cutoff by the ramp control and velocity hold systems.
Thus the range of frequencies of interest in the study of control system effectiveness in
rejection of atmospheric disturbances is approximately from 0.01 Hz to 18 Hz for the full
scale and 4.4x10- to 0.088 for the non-dimensional case.
It should be noted that the effective gain of the ramp and velocity/Mach hold systems is
not infinity thus for very low frequencies we may not get the roll-off as shown in Figure
2.5. But the atmospheric spectra also do not obey the -5/3 law for very low frequencies;
rather it gives an overestimate as compared to the actual measurements of the
disturbances [6]. We also assume that although we get a flattened spectrum at very low
frequencies, it is attenuated enough that the effect of disturbances at these low
frequencies is negligible.
2.7 Summary
We need to express the atmospheric disturbances in terms of canonical variables. We can
represent the disturbances in terms of power spectral densities. The inlet sees the
disturbances modified by the ramp control and velocity/Mach hold systems. Thus in
order to have a realistic estimate of the disturbances to be rejected by the control system,
one should use the modified power spectral density functions.
32
Chapter 3
Inlet Dynamic Characterization
As mentioned in previous chapters, in order to design an effective control system
architecture for the stabilization of the inlet during all flight regimes, it is necessary to be
able to predict the dynamic behavior of the inlet with reasonable accuracy. If we can
predict the dynamic behavior of the inlet using a relatively small number of parameters,
then it is easier to design a control system based on these parameters. Keeping this in
mind, this chapter first describes the creation of the necessary tools for the prediction of
dynamic behavior. Then using these tools the dynamic behavior of the inlet is
characterized in the form of transfer functions. Then simple models are fitted to these
transfer functions to extract the parameters necessary for the understanding of the
dynamic characteristics of the inlet.
3.1 Unsteady Quasi-ID Euler Simulation
An unsteady quasi-1D numerical code was developed by Merchant [2] and was used in
the study of the dynamic characterization of the inlet. Area variation at the throat and exit
boundary was used in the simulation to match the steady state Mach profile of the ID
simulation with the designed Mach profile for the actual 2D inlet design. In order to use
this code for dynamic characterization of the inlet it is necessary to be able to excite the
inlet with different disturbances and apply some control to analyze the control system
design. For this purpose, the code was embedded in Simulink and integrated into Matlab
to generate routines with the help of which different transfer functions can be generated
and different control schemes can be tested and analyzed.
A block diagram of the Simulink model (called an S-function) of the inlet is shown in
Figure 3.1. As can be seen in the figure, we can excite the inlet with a number of different
disturbances. Also we can apply control through upstream and shock bleed perturbations.
Atmospheric disturbances are introduced in terms of forward velocity, vertical/up
velocity and temperature perturbations. As discussed in the previous chapter, from the
point of view of the dynamic behavior of the inlet it is important to be able to study the
characteristic form of the disturbances. Thus we also have the option of applying the
disturbances in the form of Riemann's Invariants J+ and J-. For the temperature or speed
of sound change an entropy perturbation input is also provided. Thus we can excite the
inlet using the characteristic form. As discussed later in this chapter, this capability
reveals very useful information about the dynamic response of the inlet to atmospheric
disturbances. The physical interface of the Simulink model is explained pictorially in
Figure 3.2.
33
Pet
I
Temperature_Per
Shock Location
dT
Throat_MachNo
du
ForwardVelPert
Up_Vel Pert
FExitPressurePert
Pet
PressureSensors
~-
dPe
----
dbl
Upstream Bleed Pert
Inlet_1D_Model
MachSensor
ShockBleedPert
--
dM
MachNoPert
-
.
5
JMinusSensor
Y
EntropySensor
---dJ+
JPlusPert
MinusdJJ
- - J_. in sPert
J_Plus_Se
-PlusThroat
-J MinusThroat
EntropyPert
dn
-
Entropy_Throat
S-Function
Figure 3.1: 1D Simulink Model of the inlet.
Y (along inlet height)
Pressure Sensors
Normal Shock
dPe
du,dv,dT
dJ+,dJ-,dEnt
db2
dbl
Throat
X (along the inlet flow)
Figure 3.2: Pictorial representation of inlet physical interface.
34
3.2 Frequency Response Study of the Inlet
Using the Simulink model we can excite each input with a small sinusoidal signal at
different frequencies and find out the frequency response of the inlet at any desired
output. Such numerically obtained frequency responses provide good physical insight
into the dynamic operation of the inlet under consideration but they are parameter free.
Thus they do not provide insight into the physics of the problem at hand, i.e., we cannot
generalize the results. For this reason we will study the frequency response of the inlet for
the disturbances in characteristic form and try to fit the responses with simple models to
get an understanding of the physical phenomena.
The following transfer functions are studied and are described in detail in following
sections:
1. Inlet lip fast acoustic wave perturbations (dJ+) to static pressure sensor, throat
Mach number (Mth) and shock position.
2. Inlet lip slow acoustic wave perturbations (dJ-) to static pressure sensor, throat
Mach number (Mth) and shock position.
3. Inlet lip entropy perturbations to static pressure sensor, throat Mach number (Mth)
and shock position.
4. Inlet lip forward velocity perturbations (du) to static pressure sensor, throat Mach
number (Mth) and shock position.
5. Inlet lip vertical/up velocity perturbations (dv) to static pressure sensor, throat
Mach number (Mth) and shock position.
6. Inlet lip temperature perturbation (dT) to static pressure sensor and throat Mach
number (Mth) and shock position.
7. Upstream bleed perturbations (dbl) to throat Mach number (Mth) and Shock.
The static pressure sensor is located upstream of the throat near to the lip of the inlet. For
this study a location of 0.5 inlet heights from the inlet lip was used (first star in Figure
3.2).
For the 1D study the following nominal values of the inlet parameters were used:
Inlet Mach No. = 2.2
Mean Upstream Bleed = 1%of inlet mass flow
Mean Shock Bleed = 2% of inlet mass flow
Shock Location = 4.0
Throat Location = 3.5
Inlet Height/Length = 1.0/5.5
Exit Pressure Boundary Condition = Constant Exit Pressure
These nominal values are based on the steady-state inlet design as described in [2]. For a
detailed description of non-dimensionalization of different variables see chapter 2.
35
3.2.1 Fast Acoustic Wave Perturbations (dJ+)
As discussed in chapter 2, the fast acoustic wave perturbation can result from a
perturbation in forward velocity or vertical velocity, or from a perturbation in the speed
of sound, as given by expression (2.3). The perturbation in the speed of sound is
equivalent to a temperature perturbation since the speed of sound, in a perfect gas, is
related to the temperature according to:
(3.1)
yRT
a=
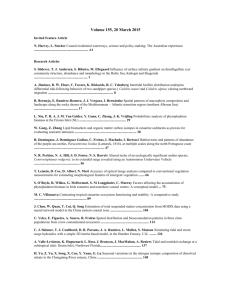
The frequency response from the inlet lip J+ disturbance to throat Mach number is shown
in Figure 3.3. Similarly Figure 3.4 gives the response from the inlet J+ disturbance to the
J+ value at the sensor and throat. From the plot it can be seen that the inlet actually
passes the disturbance with very little amplification at the throat. It can be seen that low
frequencies are most important as far as the throat Mach number is concerned.
3.2.2 Shock Motion due to J+ Perturbations
Normal shock motion is affected by the J+ perturbations but it is a highly non-linear
J+ to Mach No. at sensor and throat
tt
I
+ 4
I
I
I i |
1
1r----
r1Tn
|
I
|
-
-T,-cn
rn
T'J7FI_
-T
I
|
I
1I
i
I IF
IF
I
I '
i
- I -I F
-
Throat
Sensor
I
I
I
I
-- r
I
I
|
I
I
I|
I
T I
C
(01
1I1
77
I
-- 1I
IL
IJ~I
I 1 11I111
1 111
1I
L4
LU-
I I
II
1 I 1i1
I
I
Il
S
I
I I I
I
I
I
I
I
i
I
n
20
I
100|[
I
|
|
I
I
I
-- -F--
I
I
1 1 1 1 I il
11
| I
1|
1I 111II1
I
c
I
I
~~' ~
I
11
111
1I1
1
1
I 1111I
I
I
cci
0
-----I
l I il
I
I111
1 I
-200
-3
10
I
I
I
ll111
T T rn
~ T
I
I
I
I
I
I
-c
1
I
I
I
I
11
I
I
I
I
11
I
I
11
I
|
lilll
1
| ||
I
I
1I
I
I
i
Il
lil
I
I
I
I
I
I
I
Ii
1
1 11111.1
I
I
I
10'1
Il
I
I
I
ltIII
.
|I|
Il
I
I
I
I
I
l
I
I
I
I
|I
1
II
|
II
II
II
l
II
I
I 1~
I
I
-T
1
I
I
I
I
I
I
I
- -1 ~ T
||
-----
I1
t
I
I
I
I
I
Ft
-----
---
1 ilI
l
II
Ii
I
1111
I
i
i
i
I
T TT
I
I
Il
11111Il
I 1 I 11
Ill
1 1 1 1
1 1 11
1
I
I
I1
I
|
T r - ~_ -
--IT
I
10-2
T
-----IITI
I
111111
I
1111111
I
| Il
1 1I
1
i li
1 1 1 1i 1i
il
11111i
|111111Il
111
111
I ll1
|
I
I|
11II
101
100
10-1
10-2
103
I
I
I
T
I
1
11111I
|t'l 1 I
1h
I1
1 I
I
I
I I
1
II
1
100
Reduced Freq. (f)
Figure 3.3: Frequency response of the inlet J+ disturbance to throat Mach number.
36
101
Inlet boundary dJ+ to J+ at sensor & throat
I
- Throat
F
;1.1
1
1
i
I
I
Sensor
Il
I I
-
-
I
1
0.9
I
---- -
I
I
-
L
11
S1
i .I
11 1- - -I
-3
-
1 1I
I I IL
S0.8
.7 L -
I
I
L
---
|
I
|
111 1I
- I
10
I
II
I
I
I
,
-,
ITF
F
I-
-LL - - -
102
-
-
1 L IA
L1
I
1111
10 1
10 0
101
20 0
L
I
1010 - 10 -
I
FTTI
11
1I
I
I
I
III
i-'
- -
11111
|
|
1111II1i
I
I i
1
i
1
1
0
0~
--
-10
I
I
I
I
I
111
I
I
I
111
I1|11
I
11111
I
I
0
|
1
i
I
I
I
I
I
I
I II
II
I- I
K
I
~
ii
1
|
1
||
2
- - - Fr -
-1
I
I
--
I
i
-
I
i
ii
i
II
I
1
Ii|t
I
|||I
I
I
I
I
I
1
IIi|I
11
10
I
I
11F
T
II
|11
I
I
I
111
11
10'
I
I
~~I
I
i
I
|
I I|
I
I
i
111
IL
I
I1 lL1
~I
wi
1
111 1I
1
1
--- i i' TI FTI1r -
I11
I
-20
F
I
I
1
I
I
0
i
I
0|11
a,
C,,
a
I
-r
Ii
1
|
I
11
I
I
I
11
I
11
1
I
10"
101
10 0
Reduced Frequency (f)
Figure 3.4: Frequency response of the inlet J+ disturbance to sensor and throat J+.
dJ+ to Shock Motion (Large Signal)
+
60
O0
50
-- - -
40
E
-
-
-
-
Ii
IL
1111
I-
30
E
-
-
-
-
-
11
-4
-
4 -
-
-
-1
1
FI
-
-
0I
x
X,
I
-
--
2
-- bleed=0%
bleed=1%
------ bleed=2%
--
-
7
-1
-
E
Li
F IT
T
-
- - - - - -
20-------
- -
-
-1rl
R
I
I
I
I
lii
F
I
-
-~
I
**.
-1
~---
I
I1
-
1
I
IIl
C
0U
|
I
(D
I
III
I
A"
1 |
a
1
0
102
100
10-1
200
200I
10 0 - -
-
I
I
I
C,,
a
0
-
-
I
-
- - -
-100
200
-
- I
I
~
ii
i-
I
I
I
I
I
I
-I
--I
I
-l
I I
11|T
I
I
I
.
.,
-
.1
I
I
-
1
-
I
I2l0
1.1I
*
I
I
iT
I
I
I
10'2
-
I
10
I
I
1
- - F - i
10
Reduced Frequency (f)
Figure 3.5: Shock Motion as a function of frequency for J+ perturbation at the inlet lip.
37
II
-
I I
e..I I
I
I
II
*
I
IIF
I
I
*.
1 1
I
-
1
I
0
- F F
function of different parameters such as shock bleed, distance of normal shock from
throat etc. In order to study the effect of J+ perturbations on shock motion the large signal
frequency response of the shock motion is obtained for different mean shock bleed values.
The results are shown in Figure 3.5.
The reason for using large excitation signals for the generation of the frequency response
in Figure 3.5 is the grid size used in the discretization of the inlet. For small perturbations
the shock motion is negligibly small and the number of grid points required to resolve the
shock motion is prohibitively large. Hence in order to get an estimate of the response of
shock motion to the disturbances, large input signals that are typical of the worst-case
atmospheric perturbations, were used. Although these large signals result in the nonlinear operation of the inlet and thus are not true representation of the linear frequency
response of the system, nevertheless these plots still reveal some useful information about
the dynamic characteristics of the shock motion.
The motion of the shock is a non-linear function of both perturbations and bleed control
as shown in Figure 3.6 for a sinusoidal J+ input perturbation. For instance in Figure 3.6
we see that the shock not only oscillates according to the input, it also has a tendency to
shift towards the throat after each oscillation. Nevertheless, such a frequency response
study (as in Figure 3.5) still provides very useful information regarding the dynamics of
the shock motion. It is very clear that the shock motion is a strong function of the
frequency of the perturbation. The shock is most severely affected by the zero frequency
or DC perturbation. As the frequency increases the shock amplitude becomes smaller and
4.5
Shock
Locaton
3.5
Throat Loc ition
3
0
20
40
60
Sim Ume sec
80
100
Figure 3.6: Shock Motion for sinusoidal J+ perturbation at inlet lip.
for non-dimensional frequencies of values higher than 0.1 we get almost negligible shock
motion. Secondly, the shock motion is an inverse function of the steady-state bleed level.
38
Thus for higher values of steady-state bleed the shock motion is reduced. This
immediately suggests a simple form of controller for shock motion control. We can
simply employ a controller that provides shock motion control by a bleed that is
proportional to the distance of the shock from its nominal position. This type of controller
is presented in detail in [15] and will be discussed further in chapter 4.
3.2.3 Slow Acoustic Wave Perturbations (dJ-)
Slow acoustic wave perturbations also result from all the atmospheric perturbations that
we are considering, namely forward velocity, vertical velocity and temperature
perturbations as given in chapter 2. The frequency response of the inlet from Jperturbations to throat Mach number is given in Figure 3.7. Figure 3.8 gives the
frequency response for J- at the static presser sensor location and the throat. It can be
seen that the inlet has almost a flat response for J- perturbations. Throat Mach number is
affected to a higher non-dimensional frequency of approximately 1.0. Also from Figure
3.8 we see that the inlet amplifies the J- perturbations at the throat by a factor of almost
2.25. From the spectra of J+ and J- disturbances shown in Figure 2.3 in chapter 2, we see
that incoming J+ and J- disturbances have almost equal magnitudes; therefore (comparing
Figures 3.4 and 3.8) from the point of view of the control of throat Mach number Jperturbations are more important than J+perturbations.
J-to Mach No. at throat and sensor
5
--Throat
7I
-
TF
F
1--7
I
2
-
- -
I
I
I
F
I
10
- -
TF
1
1
--
F
-
I
- -
1
1
1
1
1
L I
10-3
--
I1
1
- -
1- -
F
Sensor,
---
T,
-
ii
I
-TI
I
I T
-ii
- -
0-2
11
J
I L1
-I
7iii
10
TF
I
-
F
I
F
I
T
- -
i 10 010
I
F
F1 T
-1- -I
T
1
a)
0__
-
~~I
F
- F
I
I
T1 T 1
111
i1
1
I
- - -
- -
1
I
I
l
i
1
p
200
10
1011
10
I
- - -- -
200
10-3
-
-
II
--
-
- -
F
-
- - - - -
- -
I
'
10_2
10Reduced Freq.
100
Figure 3.7: Frequency response of inlet J- to Mach No. at Throat and Sensor.
39
10
Inlet boundary dJ- to Throat & Sensor J-
-
Throat
Sensor
--3
111
- - -|11I
I111
2
-
I
C
0)j
i
-
||
-
I
i
10'3I
|
-I
1
0-2
i i iI i
I1 I I-
i
I
1
-
-
-
I
I
I
1
|I
1
r
I
L111111
1
I
I
0-11
11 11
I
1
1
|
T
|1 |
I
I
i
I
1
iii
I
11I 111
I
1111 1
T
I
- -|
|11
I-1
II
I
1
I
i i iii|
I
1|
-
|1
)1
|
|
Iii
I
1i
iI
0
I
I
I
I
i
1 11
I
I
1111
I
I
1111|
I
1
I
1111
I
I
it
I
11
I
11111I
I
I
!
i
|
|
I
i li i
ii|i
200
I
0
-
-
-
I
I
I
-I
-
1
I
I
I I
I
I
I i 1
I
I
- - - T F I
-
i
'
'al
'
'
-200
i
I
T - -
I
I
I I
I
I
I
1
|1
I
a
-10
|
I
'1 .
I
l
I
I
I
I
i
I
11111I
I
I
I
I
-
I
-
T
-
I
1
Reduced Freq.
i
I
I
10
100
1011
I iI
T -M
''
t
i
111111
-
10- 102
I
EI
I
I
I
i
I
lilti
J-.
J- disturbanceI to sensor andI throat
of
the
inlet
response
Frequency
Figure 3.8:
I
i
i
I
t
t
I t
l
I
I
|
i
1 111
3
I
|1
SdJ-
to
i
Shock Motion (Large Signal)
0
-
Z:)
E
I
10
|
| I
I
05
i
hi
lt
|
1
Ii
ilt
i t
1 11
1I I
ii
ittiI
|
II
I
I
2
'
-
---
-
i_
I
1111 1
-I I 111111
I
I
------------I
I '
I
11111l-r----ri-----r4
I
I 1 1 1 |
It
-
1
i
i
iiI
iii
I
i
I
i
i iI
Ii
i
-
I
I
I
it...
1
S. .............
I
I
1 1
-- bleed=0%
bleed=1%
-----bleed=2%
I
I
11th l
.......
i
3
I
i
t
I
iI
l
I
i
IIi
I
i
I
I
I
II
-I
I
-,
I
t
I
4......
I
, i
I
I
1I
I
I
|
I
|
i
L
il
Ii I
i Ii
|I*Ii
-
T
I
i
ItI
I
-2
I
I-
i
I
I
i
-- r-,--rrr-
I
I
I
.''**.... ..,..
I
I
I
I
L
I
I
I
l
I
II
11I
I
I
L
Ii
I I
i11
I111
i
I
t.1
-10
10
10~
iiI
Ii t
'-I
I
I
'.
I
t
*
10
10
200
0
-100 -
|
~ I ~ I ~~~~
I
I
I I
|
I
I
1
.I
1%1 1 1II
' . I
I
--
-200
10
Figure 3.9: Shock
I|
I
*
I
I
--
iIt
1111
..
il
10-2
Reduced Frequency
i
li
10
. -r
.I
1
10
Motion as a function of frequency for J- perturbations at inlet lip.
40
3.2.4 Shock Motion due to J- Perturbations
Shock motion is also affected by J- perturbations and a large signal frequency response of
shock motion for J- perturbations is shown in Figure 3.9.
Comparing Figures 3.5 and 3.9, it is immediately clear that as far as shock motion is
concerned J- perturbations have far less affect (by almost an order of magnitude) as
compared to J+ perturbations. Also shock motion is again severely affected by the
amount of bleed, which has a much stronger attenuating effect in this case as compared to
J+.
3.2.5 Entropy Perturbations
Entropy perturbations result from a speed of sound or temperature change in the
atmosphere as discussed in chapter 2. The frequency response plots for throat Mach
number and values of entropy at a static pressure sensor, located 0.5 inlet heights
downstream of the inlet lip, and at the throat are shown in Figures 3.10 and 3.11
respectively.
dE (Entropy) to Mach No. at Throat and Sensor
I
4
-Throat
Sensor]
-v3
r
I I I1
1
a
1
1
TTT
!-,- --
II
1I
1
1||1
1
I
I
-
- -
7-
T
II
I
I
-
CM
0L
I
I
10
.3
10-2
101
100
101
200
I
100
--- -
-
I
-I
1
-
11
1I1I
II
U)
100
0
10'3
- -
-I
T
~
|
|
1
0I
L-1
I
i -i
1
I -I
1
F 1II
1
1
1I
1- 1
10-2
I
I
-- II-- I
-
i - - -i
T
I
I
I
-- - - I - - I-I --I
l
ii
II
I
r
-
F
1
1
1
- -1
7
I
I
I
It
-
'I
I
I
I|
I
-
-
-
- -I
I
1 |
i
ii
I
-
100
1
-- -
I
11
101
Reduced Freq.
I
I
-
101
Figure 3.10: Throat and Sensor Mach number as a function of frequency for inlet lip entropy perturbations.
(Sensor is located 0.5 inlet heights downstream of inlet lip).
41
dE to Sensor and Throat entropy pert.
1.1
a
1.05
-
4-
-
--
LL4
0.91
-
-
-
I
111I-
--
--
-
11
-
I
111111I
---I
I
-11
I
lil
1
i
~i
ll
|
|
I
1
I
11i
|
i ||
|---------
I
i
|
111
I
.
I
II
1
II
I
11I11
1I111
1
IllI
11
-
|
|
|
I
I
I
I
|
--I|
|
I
I
|
|
I
|
I
1111
|1111
I-|--
I i
11111|1l
I
I
- --
I
111111
l
102
I
I
I
I
|
I
-
I
I
1I
I
1i
1 111F
1
1
I |||1
1
I I
1
1
1I
Il|l
I
I
i
I
I
I
1 i|Ill1I
T
I
T 1T
11 11I
1 11
111i
1|
||
I
-200110'
I
I
I
-100 -
101
10
I
)
I
1
10 -0.
-0
200
10
01
1
101
10
10I
I
I
11
0.81
10-3
-
---
I
|11Il
1
-Throat
Sensor
-
III
- -
|
I
1-1
1
0
0.
-
-
--
I
I
I
|I
|
11I
11I
II
I
l I tI
}
I
1l II
|
I I
|
|
I
T
|
|
|
-
I
I
II
1
I
11
I
100
||ii
|
|
I
I
I
ll
1
FI
I
III||
I
I
101
F
l
I
1
1
-
10
Reduced Freq.
Figure 3.11: Inlet lip entropy perturbations to entropy perturbations at Throat and sensor (located at 0.5
inlet heights downstream of inlet lip).
As can be seen from Figure 3.10, the throat Mach number is not affected much by the
low frequency components of the entropy perturbations; it is affected mostly by
perturbations that have a non-dimensional frequency higher than about 0.1. By looking at
the entropy, as an output, at the static pressure sensor location and at the throat we can
see that the inlet does not amplify the entropy perturbations; and it remains almost
constant from the lip of the inlet to the throat.
3.2.6 Shock Motion due to Entropy perturbations
Figure 3.12 shows the large signal frequency response for the entropy perturbations. This
response is almost identical to that for J+ except for a phase reversal, i.e., for positive
entropy perturbations at the inlet lip we get negative shock motion which means the
shock moves away from the throat.
From the transfer functions of shock motion for different canonical perturbations it is
clear that J+ and entropy perturbations are most important from the point of view of
shock motion control. Similarly for the control of throat Mach number the J- perturbation
is most important.
42
Entropy to Shock Motion (Large Signal)
80
bleed=0%
'a
2
60 -
- - -- -- -- --
-5
1
E
L
-
--
liiilI
-- -
1I
I
I|
....
-LI". i j*
i- -
I
I I
..
I
1
beee|
I |1I o
I|
I2. . ... .
. . . . ..
I
...
~ ~-I
~ ~_1
- - - - - -- 7 -1 CiI I1
F
I
-bleed=1%
-- --- bleed= 2%
1
I
IL
IL
I
:| 20 -030
10-2
100
10'1
11111
I
I
I
I
I111
I
%i
10ook
I-
I
I
-
F TI 1
I
_
()
0
a.
111
1
-100 k- --
|
i iLi
i
_j
[
|~
~ ~~~_
1
I
I
- 4.
i _j
_j
11
iI
|lIIII
L
I
I
j
10-2
I I1
I
"
*.~
10-1
I,-
10 0
Reduced Frequency (f)
Figure 3.12: Shock Motion as a function of frequency for Entropy perturbations at inlet lip.
3.2.7 Frequency Response Plots for Atmospheric Perturbations
The frequency response plots for atmospheric perturbations in forward velocity, vertical
velocity and temperature are also computed and are given in Figures 3.13 to 3.15
respectively for comparison purposes.
Note that the temperature perturbation results in all three canonical perturbations i.e., J+,
J- and entropy and thus its frequency response plot is a combination of all three canonical
plots scaled by different factors. From a comparison of the effect on throat Mach number
response to different atmospheric disturbances it is apparent that the temperature
perturbation has the smallest affect on the throat Mach number. Throat Mach number
perturbations due to the temperature perturbations are significant up to a non-dimensional
frequency of around 0.4, while other atmospheric perturbations are significant up to and
beyond a non-dimensional frequency of 1.0.
43
Forward Velocity to Throat Mach No.
6
I
--
5
.-
4
I
I I 1
I
--
4
I
1
I
-
--
4
I I
I
- --
- -
I
1
1
i>2
- - --
-
C
(D
---
1
1
r -
--
-
I
IL
- 7
r-
-
-
1
I
I
- -I
l
-
II I
-
-
I
I
- 1-
1 -
I
I
I
1
I I
I
----
I
-I l
1I
-|
|I
I
I
I
------
-
I
1
I
I
-T
I-
-
-I -I
-
I
I
I
.1
-I-
-
rT
1-
I
Ul
1
I
1 -
- +-
CA
I
1
- - - ---111 I
I
II
-
3
1
---
I
I
I_
1
1
I
I
1
|
- 1 11
-
_
10,2
- -
f-
-
I
1I
1
I
1
--
-
I
I
I
I
100
10-1
1
I
a1)
-C
00
-1
-
-
-
--
-
-
-
--
-
--
-
-
-
t
)no
10 2
10-3
100
10~1
Reduced Freq.
Figure 3.13: Frequency response of forward velocity to Mach number at throat.
UpVelocity to Throat Mach No.
8
I
I
L
I
I
I
I
L-
-4-
I
I
7--
f-++f+ +I
-I
4-I
- --
I
-- - -
-
-
-
-7
23 I-
F
- -
L
L -I-
I
I
I
I
I
I
TI
I
I -
-
-
4- i
1-
10-3
-I-
- 4 -
-
T
T
- - - -
4
10-1
-4
I -
- - -
4
~
-
4--4
10-,
1 0"
20011
150 --100-
--
- --
r-
-- -
50----
-
--
-
-
-
- --
T
r-
-
L
--
0-- --
(D
-100
- ---
-150 - -
r
-
-
--
--
+ -+ - - --
--
L
.L
T-
- -I-
- -- --
L - - --
-
--
-+-I-++
4
+ -
-
I-
-
4 -
-
-L
-
-,--
- 1
-l-
-
7 -
17
-
----
a
-
I
---
-
- r-1-
-
-
-
-
-
-
-4
-
- -- ---- ----- - --- ------ ------
1
r - r-
-
--
T-- ----
r
-
---
- - -+
-- - - -
I-r- -r
- - -
4
-4-
I
104
-- -
-
-T7-r-T
--
-4
ii
-r
-r-r
4
4
-
--- -
-4
10,1
10-2
Reduced Freq.
Figure 3.14: Vertical velocity to throat Mach number frequency response.
44
-
10
-
-
--
Temperatureto ThroatMach No.
t r
$
i
~
- 0.5- -----
-
--
10'3
--
- -
I- r
--
- -
10-2
-
-
--
- -
100
10-
200
(D
Cn
50-
--
- -
--
-
-100 ----15-
10'3
- - - -
I
-
-
-
--
--
-
---
7-
-
-- -
- -
-
- --F--- -
-7
t
- - - - - -1
10-2
_|
-
-1
--
--
--
- -
t
101
100
Reduced Freq.
Figure 3.15: Temperature perturbations to throat Mach number frequency response.
3.2.8 Upstream Bleed Perturbations
In order to control the throat Mach number an upstream bleed or suction valve is used to
cancel the disturbances propagating through the inlet. The purpose of the upstream
suction is to launch a counter disturbance with the right magnitude and timing so that by
the time the incoming disturbance reaches the throat the counter disturbance is there to
cancel it. In this way we can use the upstream bleed to act as a disturbance rejection
actuator. In order to perform this function we need its dynamic characteristics or more
specifically its transfer function to throat Mach number as given in Figure 3.16. From this
we see that if we bleed 1%of inlet mass flow we get around 2.5% variation in throat
Mach number, which comes out to be around 0.03. This does not give us enough control
authority to control throat Mach number variations due to atmospheric disturbances,
which cause around 3% to 5% variation in throat Mach number for worst-case inputs.
From this discussion it is apparent that in order to reject the worst-case atmospheric
disturbances we need to bleed around 2% of the inlet mass flow. The main purpose of the
upstream bleed is to prevent the inlet unstart by not allowing the throat Mach number to
fall below unity due to incoming disturbances (see inlet unstart mechanisms in section
3.7). From Figure 3.16 it is clear that we need to bleed more to prevent the throat Mach
number from falling below its nominal value. This means that we can have a mean bleed
value of 1%and then allow the control system to bleed up to 3% (i.e. 2% perturbation) or
45
more to prevent the throat Mach number from falling. At the other extreme, we can at
most completely close the valve, therefore we can only decrease the bleed by 1%(i.e. by
mean bleed value). This gives us less control authority to prevent the throat Mach number
from rising. However, an increased throat Mach number, due to incoming disturbances, is
not as critical as a decrease in throat Mach number as it would push the shock
downstream and would not result in unstart of the inlet.
Upstream Bleed dbl to Throat Mach No.
4
I
I
I
I
I
II
|
Il i i
11
l
I|
121-
CD
i
11
I
1
I
I
-
_
1
1
11 I 1I
I
11
I
1
111
1
| 1I iI 1 iI
i
1
-
I
I
I
I
I
IIII11
11
~-
-
-
I
I
i iL - - - Ji
I
1 11
1
I~ I it i t1
1 1 11111
1
11
1
1
I
I
I
-
T
i-I
T11
I Fli
i
i iiII
II
I
I
1
I
I
I
I
I
|
I
I
I
i
l11
1
I
I
_ JI
11 I
1
102
00~~~
I
I
1 11i
i i 1i
iI i1 1 i 1
I
Ii
I
I1
1
1
l
1
L
-l
1
I
I
-
i
1
I
111
T
I
I
|
~0
1
FI
I
I L
0I~I
100I
CL
-1
L
- -|- -
~~ '
00
I
T ||T
1F - - - -111
I!L1I
I
'
JIJJ.
11
10
~
' ' ' ''-
-
'
I
IL
ILi I
' ' ' ' --
|
I
I
I I
-
I
I
I
I
I
I
I
I
I
I
I
I
|
-
I
II
II|
|II I
|
|
-I
iI
I
|
I
F
I 1
|
|
I
-
I-
|I
'-
T
I
i
'
i1
10
1
|1-r
..
I
I I
100
F
I
I
I
|
11111
|
-C
11
I I|
I I1I
111
II|I
10'1
-
I
1I
|
I
i - ii
1
- -
iI
i
I
I
I
I
I
i i|| |
111
I
I
il
I I l
1 1 11 11
|
1
I
I
li
T|
I|
|
- -- '
2
10-3
102
10-1
100
101
Reduced Freq.
Figure 3.16: Frequency response of the throat Mach for upstream bleed perturbations.
Another way to look at the upstream bleed effectiveness for canceling disturbances is to
look at the transfer function from upstream bleed to characteristic disturbances at the
throat. Figures 3.17 to 3.19 show the ability of the bleed to change the J-, J+ and entropy
at the throat respectively and hence give a measure of effectiveness of the bleed in
canceling these disturbances. As can be seen in these figures the upstream bleed is very
poor for canceling the fast acoustic wave and entropy perturbations at the throat; it is
most effective in canceling the slow acoustic waves. The throat Mach number is most
strongly affected by the slow acoustic waves, so it is fortunate that we can control it most
effectively.
46
dbl to Throat J+
i i i i iIi
F
i
| T
iI I
i
T1
-F
F
- - -
1
I
III
6
I
iI
I
- - -
1I11II
I
I
li1
0.1
-I - FR0.05
- - i-
[ 1
F
i
11
[
F
T
1
- -'t
i
1
F
111
F
1
1|02
|
|
I
- - - - -1 t - -1
- -
|
I
11
1 0
1
1
li
I
-- - - -
1
F
1
I
i
F
F
FilT
0
1
0
F
T
F
-
F
I
I
-20
-C-ii
IIi 11 1
111I111
I1
0
F
-
|
S
-
|
1
l
)
|
I
1
1
[
1
|
|
I
i
i
-
I
FF|11|l1
11
11 1
1
I
I
11
II|
I
1
F F
|
|
F
|
11
1-
|
|
--
-
|
|
1
-
1
1
1
ii
F
-- iTi
1
1
-
1
I
F
I
I
F
I
I
I
|
1
|1|
I
1
|
1
F
-
i
-- |44
0|
i
F
-4
|
li i
-4|
|
|
I
F
|
I iIiii
l
l1 i
|F|}
I -4l i
F
[
|
1
|l
1
-i
|
II,-||1
I
F
F
||1
I
I
1
F --
-
11
IT
lI
1
|
F
F
T11 11
0
1i
-60
Ca
F
11111
F
F
-
l1
1
|
-40
(D
U)
F
I
111|
|1
1
I
F
-i
|
F
[
|
|
I|I
I
|
|
I|
|I
[
-C
1|
11 11
i
|
F
F
|
i
|
l
|
-80
-100
-120
1 0-3
10-2
100
10'1
Reduced Freq.
101
Figure 3.17: Upstream bleed perturbations to throat J+ variations as a function of frequency.
dbl to Throat J2
1.5
F-
-
i --
HFF
1[1
03I
-
-H-H
-I
0
I1
F
f
ii
--
I
--
l
H-
1
|
1
H
-
----
00
10
*0
-o>
i
1
1
F
I
I
11
I I
104
I
1
[ [
I I I
10
1
11
1
I
F
11
1
0
0
->-21n10n
I
100k --a
U)
a
-C
0
+
-
-
- 1 -
I 111111
jijii
--
--
r r
-
-
-
-
j
F
+
+
r
r
-
-
- --
-
iji
-
-- -
ilIiI11
4
-
-
-1
-
I
+
-
T
- - - - r -1 -
-
i-4 -4-1
1
1-
-1
0~
-100--
-200 -10-3
-- |--
-j
10-2
--
- -|
- -
-
10-1
Reduced Freq.
-
-
100
-
10'
Figure 3.18: Upstream bleed perturbations to throat J- variations as a function of frequency.
47
|
|
dbl to Throat Entropy
0.035
00
-
II
-
S0.015 - -1T T---
- -
0.0 5
II
I
-1
-
1
|
I
I
F
I
0 2
I
IF-T
1- F
I
I T
-
-
1
|
-
1.ti-
-
-A
--
---
-
I
111
111111
i iF
F
I
F F
I
I 1--1 | |
I
I11
FI
I
-
-
-L
F
I
1
F
I
IJ
F
I -
I
T
1
IF
-
-
1
I
I
F
I
IJF
II
I
I
I
I I
I
I
T
1FFI
1 -|
100
r
-
I
F
0 r1 -
fl
I
_
- - -
1F
I
F
F
-I T111
711i
i
00
F 1
F
0
1F
01
10-3
1
F
1
1|
|
|F
IF
I
I
-
-
11
|
F
FF1
|
-
1
I
1
11
I
--
'
I
I
11
F
F
F
0
-0
10
1000
10104
10'2
102
I Il
FIFIF
_
IL
I1
1
I1
Reduced Freq.
supersic
F
I I'll
101
10
of th ine an
ine-compressor
Figure 3.19: Upstream bleed perturbations to throat Entropy variations as a function of frequency.
ide about
to hav a
|q|uatitiv
it is ver imotn
Thrfoe
an vic vesa
surge/stall
copesin mie
For~~~~~~
engine
are coupled
hig
reovr
I in I th
ses
that
ile
i
thintdya
untr
1engIIca
cas
i
3.3 Effect of Back Pressure on Shock Location
For mixed compression, high recovery supersonic inlets the dynamics of the inlet and
engine are coupled [11] in the sense that inlet unstart can cause engine-compressor
surge/stall and vice versa. Therefore, it is very important to have a quantitative idea about
the effect of the back pressure on the shock location. Back pressure cannot affect the
throat Mach number as the throat is in the supersonic flow region; therefore, the back
pressure perturbations affect only the subsonic flow region after the shock. Varying the
back pressure also affects the shock location, because it changes the exit boundary
condition. The transfer function of back/exit pressure to shock location is shown in
Figure 3.20.
To investigate the effect of shock bleed on the ability of the exit pressure to move the
shock, transfer functions were calculated for different mean bleeds at the shock. As can
be seen in Figure 3.20, at low frequencies the effect of bleed on shock motion is
significant and the shock becomes less sensitive to the exit pressure perturbations. But at
higher frequencies from a non-dimensional value of about 0.08 onwards, steady bleed has
almost no effect. But since the shock motion is small at higher frequencies, this
ineffectiveness of the bleed at high frequencies is not a problem.
48
Shock Location/Exit Pressure
-25
M 20 -
2*****
E-
-10-----
-----
--1no bleed
-- 1%bleed
r-2-1'-1'-
-
---
-
-
-r
-
i
II
I
*-.
2% bleed
...
I
Y---
-
---- -
I
rr1
I
0T
10-3
102
. . . . . . . . . . .. . ...
110
.I
.-
I'-.1,
I
I
200
I
i
i
I
-10------
I
II
I
il
I
*
.
l
I
I
I
I
10
I
I
I
I
II
I
I I
I
10
10
II
t1
'
I
I
I
I
.--
--
I
I
I
I
10.
"
-|---------
I 11111
I
..
1
L I
I--
---
I I
-200 - -10
J
I
I
I
|1021
2100
I
10
Reduced Freq.
Figure 3.20: Exit pressure to Shock Location transfer function. Magnitude is the percentage of the shock
movement of its distance from throat for 1% change in exit pressure from its nominal value.
Not shown by the linear response plots is the fact that the bleed effectively adds a
deadband effect to the shock motion, especially at DC and very low frequencies. For
higher frequencies the dead band almost vanishes. A typical hysteresis plot for shock
motion due to exit pressure perturbation at DC is shown in Figure 3.21. From this figure
it is clear that the shock has more tendency to move towards the throat as compared to
move away from it. Also, increasing the bleed at the nominal position tends to keep the
shock fixed and requires a larger perturbation to actually start the shock moving.
Another aspect of the effect of back pressure on shock motion is its comparison with
other disturbances. From the sensitivity magnitudes one can readily conclude that back
pressure has a smaller effect on shock motion. But while we can reduce the shock motion
due to atmospheric disturbances to quite low values using both upstream and shock
bleeds, the shock motion due to back pressure is only affected by shock bleed and hence
must be taken into account in an unstart control architecture.
49
15
C
0
E5-
c
-10 -------------.
-5
--
l
an
-105-it
-6
-
-
-
-
-
----
----
-
-
-
-
--------
-------- -
--- -----
-
-
-
-
-
Throat
m
lctoso
-4
hc
o
in
0
2
-2
Exit pressure Change (%of Nominal)
4
6
Figure 3.2 1: Dead band at DC, of shock motion, due to 1% and 2% bleed at nominal shock location.
3.4 Constant Exit Pressure Boundary Condition Assumption
and its Implications on Shock Motion
To understand the shock motion as a function of different parameters it is useful to have a
simplified model of the shock motion that captures the dynamics of the shock with
reasonable accuracy. Such models are based on a linearization approach described in [12].
This method is used to analyze the acoustic reflection and transmission properties of
normal shocks in ducts [13, 14]. Using these analytical techniques MacMartin [15] has
derived an ODE that captures the shock dynamics with reasonable accuracy. From the
model it is apparent that the transmission coefficient of upstream fast acoustic
disturbances, or J+, is nearly unity. Thus J+ disturbances effectively pass through the
shock and have almost negligible effect on shock motion. But from Figure 3.5, we see
that in our 1D simulation the shock is very strongly affected by the upstream J+
disturbances. This can be explained by the fact that we are using a fixed exit pressure
boundary condition for the inlet. Thus in the simulation, the exit pressure boundary
condition is such that it gives a reflection coefficient of -1 for downstream propagating
disturbances. Thus a J+ disturbance, although it passes through the shock almost
unchanged, gets reflected at the exit boundary and thus appears as upstream propagating
50
pressure disturbance, as though the exit pressure generated it. Thus Figure 3.5 is showing
the shock motion due to perturbations in J+ if we keep the exit boundary pressure
constant. If we make the exit boundary condition such that there are no reflections from
the boundary then the shock motion is reduced, as shown in Figure 3.22:
dJ+ to Shock Motion (Large Signal)
30
-25-
- -
-
-
- -- -
-4
-
-
-
-
- -
- - - -4-
bleed=0%
bleed=1%
------ bleed=2%
-
-- -- -
20-
E
2
E 15-
-- -
I
I
I
I
I
I
-0
-
II
-1- _- - - - -
I
I
I
II
I
ii
I
I
I
- - --
I*'e
1
I
I
I
I
* .
I
I
I
- - I 11
1-11I
I
I
1
I*
-1 I 11I4I . - - -1- -
I
I
I
.
I
t
-
I
I
I
*
1
I1
10
3
I I
1***.
I
10-1
102
I
I
0
- - - -- |
|
I
I
I
I
|
I
- -| --
-
I
I
I
I
I
I
I
II
4I I I4--
I
II
i
I
I
t
I
i
I
I
i iiI
100
200
I
II
100 1---
I
I
11111
I
II
I
I
I
I
I
I|
II
CL
i iii
I
|
|
|
1
|
1
I|
1-
|
0
-
-
I-
-
-
---
-100ok---I
-2C^
10-3
I
I
I
I
I
I
I
I I I
I
10-2
10-1
100
Reduced Frequency (f)
Figure 3.22: Shock motion due to J+ as function of frequency with no reflection condition at the exit
boundary.
We see that even after implementing a no reflection boundary condition at the exit, the
shock is still strongly affected by the J+ disturbances which is contrary to the conclusion
drawn in [15]. From a comparison of Figure 3.5 and Figure 3.22 it is clear that the shock
motion is a strong function of both upstream and exit boundary perturbations.
In the real operating environment we need to interface the inlet with a compressor. In
order to have realistic exit boundary conditions at the inlet-compressor interface we need
a coupled inlet-engine dynamic model [16]. Using such a model we can define
Compressor-Face Boundary Conditions (CFBC) that are a simplified representation of
the dynamic response of the compressor to the incoming disturbances arriving from
upstream. There have been a number of studies to create simplified models for the
prediction of unsteady CFBC [17, 18]. Sajben [18] presented a simplified model for the
computation of transmission and reflection coefficients accounting for compressor
51
configuration and Mach number. His results show that for different compressor
configurations and Mach numbers the reflection coefficient can vary widely from -1 to 1.
In a small-scale wind tunnel experiment, we can reasonably assume the exit pressure to
be constant and thus for these conditions the frequency response plots of the shock
motion given in previous figures are applicable. Moreover in any real scenario with inlet
compressor interface there are bound to be some J+ reflections, and although they may
not have a reflection coefficient value of -1, assuming a value of -1 for the reflection
coefficient gives us the worst-case scenario. Thus from the point of view of the study of
the effect of atmospheric disturbances on inlet stability, assuming a constant pressure exit
boundary condition gives us a worst-case scenario (as it reflects back all the incoming
disturbances) and stabilization of inlet for this condition will ensure stability for other
compressor face boundary conditions (CFBC) except for the disturbances that are
generated by the compressor or engine surges.
3.5 Constant Delay approximations of the Transfer Functions
Acoustic wave perturbations AJ+ and AJ- travel with speeds u(xt)+c(xt) and u(x,t)-c(x,t)
in a duct, where u is the local stream velocity and c is the speed of sound. Note that both
u and c are functions of space and time. Thus in the frame of reference of the inlet the
acoustic waves may travel at different speeds at different locations. The area variation
appears as a source term and these characteristic acoustic perturbations may change their
amplitude as they are propagating down the inlet. An acoustic perturbation traveling
down an inlet with or without amplification can be modeled as a constant time delay in
the frequency domain. The value of the time delay depends upon the distance along the
inlet and the speed of propagation of the disturbance. The amplitude at any given point
along the inlet depends upon the amplification factor of the given disturbance.
This immediately suggests a simplified model for the transfer functions of different
perturbations. It is apparent from Figure 3.4 that J+ perturbations travel down the inlet
with almost no change in amplitude at different frequencies, as the magnitude of the
transfer function is almost the same at the static pressure sensor location and at the throat.
The phase difference at the sensor and throat signifies different time delays
corresponding to their physical location along the inlet.
We can represent the transfer function of a given disturbance by using one or more
constant delay terms over the range of frequencies of interest. For example forward
velocity perturbations comprise J+ and J- disturbance. Thus a constant velocity
perturbation would travel down the inlet with velocities u+c and u-c. Thus we need to
approximate the forward velocity transfer functions with at least two constant delay terms.
Therefore we can write:
N
TF = >ZAi exp(-j247i)
i=1
52
(3.2)
Where A, is the amplitude and Ti is the constant delay. The delay T, for each perturbation
depends upon the propagation speed of the mode. N is the number of terms with which
we need to approximate the transfer function. For fast and slow modes the delays can be
evaluated as:
J
T+ fdx
U+C
(3.3)
T-fdx
T=Where T + is the time delay for fast acoustic waves and T - is the time delay for slow
acoustic waves. The integral is taken from the start of the inlet to the point where we
want the transfer function such as sensor or throat. Once the time delays are evaluated the
amplitudes Ai's can be evaluated by doing a least squares fit with the numerical transfer
function (see appendix A for the code listing). Flow velocity u and speed of sound c in
the inlet are the steady-state values established by the nominal operating conditions. For
an inlet Mach number of 2.2, the quasi-ID solution gives the following profiles for the
isentropic inlet:
2
1
-
Co
0.95
CI()
S1.5
SDFE1.5 ----.
- --
1 -U-9
I
S
0
-- -- - -
- -- -- -
--
0.8 -- --
- - -- - --
-
-
- - -- -
S
-- - - --
*0
75
0
I
I
-- ---- -.
-
- -
0.75
0
2
4
X (position along inlet, non-dimensional)
6-2
0
2
4
6
X (position along inlet, non-dimensional)
I
EI
2.5
-
1a
-
7
- -
--
- -- -08-- -- --
I
0.5- - - - - - -
-2
-
- - - -- - 9 -- --- - - -
-- -
I
I
- -.
1.
I
I
2
0.5
L
i
0
21
2
4
6
2_
3
4__
-
1
'S,
0
0.
-
- -
X (position along inlet, non-dimensional)
- -0
2
4
6
01
1
0.
-
-1
1o2
- -- ---- - - - 0 X (position along inlet, non-dimensional)
0
--
.
--
.0
1.51~
U
I'
0
1
2
Figure 3.23: Flow velocity and speed of sound from quasi- 1D simulation. The speed of fast and slow waves
as a function of inlet position is also shown.
53
Using these values of u and c we can calculate the time delays at different locations along
the inlet as shown in Figure 3.24. From the Figure 3.23 it can be seen that, in the frame of
reference of the inlet, the change in the speed of fast waves is not significant while the
slow wave exhibit a considerable decrease in the velocity near the throat. This change is
reflected by an increase in the time delay for the slow waves near the throat.
0
1.5
- -----------
-
-
-
--
---
-
-
-
- -
--
- - --
----
-
-
-
-
----
-
-
-
--
a)
E0
'a
a)
E
0
-
j- -0.5
0
0.5
1
1.5
2
2.5
3
3.5
4
X (position along inlet, non-dimensional)
Figure 3.24: Time delays for fast and slow waves in the inlet.
A few sample transfer function approximations using the method described above are
given in the following paragraphs.
3.5.1 Transfer Function from Inlet dJ+ to Sensor and Throat
Using the integral for fast acoustic wave perturbations (or from Figure 3.24 for
approximate values) we find the following time delays for the sensor located at X=0.5
along the inlet:
T* for TF at throat = 1.615
T* for TF at sensor = 0.23 80
54
For J+ perturbations we expect only one term in the constant delay approximation, as it is
the characteristic disturbance. Thus the transfer function from inlet lip J+ perturbations to
sensor or throat can be written as:
dJ, (jo)
.U = Ah exp(-jcoT*)
dn (jcv)
(3.4)
We can determine the amplitude Ath from theory or from the numerical transfer function
(Figure 3.4). As expected the constant delay model of the transfer function is in good
agreement with the numerical transfer function as shown in Figure 3.25.
Numecal TF
---+const.
Delay TF
F
(D
1
L
I
F
I1
_0
I
F
F1 FF1
F
ill
F
I
I
FT
F
I1
F-1F
F
IFFIF
1,F
F
|F|1I
F
-
F
_ _
I
F F FFFFFI
F
F
F~~ IF
FF F
F
F
FO
10-3
F
I
FIF
I
F
FI
I
F
10-2
I
F
I
F F
10-1
Fu
100
101
Reduced Frequencey
200
I I .
I
- -
100
-- -
IT1
(D
ci)
cu
F IF
I
I IF
l
I
10
1
I
I I
- - -
1
I
0
1
F
.th-
F1-
C
FF
-
I
-
I
100 -
FI
F
F F
|
I
Fl
l
I
l
F
FI
F
F~
F
F F
I
1
F
[
FFI
i
IF-
T
I 1
-
10F
IF
F
F F
10
10
I
-200
10-2
i[
ILL |
10'1
Reduced Frequencey
Figure 3.25: Comparison of the numerical and constant delay TFs from inlet lip J+ to Throat J+
perturbations.
3.5.2 Transfer Function from Inlet dJ- to Sensor and Throat
Similarly as in the case of fast waves we can model the slow waves transfer function as a
constant delay. Using the integral for slow waves (3.3) we get:
'This can be done by linearizing the Euler equations as described in [2].
55
T-for TF at throat
6.81
=
0.6390
T-for TF at sensor
The fitted and numerical transfer function at the throat is shown in Figure 3.26. It can be
seen that the fitted and numerical TFs are in good agreement.
given mag and fitted mag
4
Numerical TF
+ConSt. DlT
--3
-
-
2
I
T T
|'
-
i
I
|
Fi
-
-I I
Lil
|
|I
i
1I|
1
i111
I
I
I
11 1
II
I
-21
1l -I
It 11
l
i
I
Lit Ii
L i
11
Ii
i i
i
I
i
I
i
1
i
1
-
-
i
I
l
1
I
- - -
-
I
11
1
i
I
I
I
i1
1
I
I
I
TF ii
1
11
-1
|3
I
1
1111
1
IIl
I
I
iiiII
I
i
ii
I
i
i
I
I
I
i
i
it
i |
11,11
I
I
i
i i
I
LI
IIi
i i iI
I i
i i
0iii
I
101
100
10
102
103
'
I
l
ili
I1 i
I
I
7
T
t#4
II
I
i
t
TI F-
ttt~is
11
1
i
I
I
I
1 i
::
-
ii |
|11
1
I
111111
0-
|
I
I
l11
lii
|
|I
til
I
I
I
I
I,
I
I
--i
-
--
|it:|
gien phase and fitted phase
200
10
-
100
I
T
1
7
--
I
I
-
1|
li
I
I
-
|
I
I
I I
|
1
1
I
I
F
I
I
|
|
lii
l
1
i
-20'
104
1
I
ii
ii
11111
|-
-f,e -
I
I
t
I
|I
I
I
I
I
IT
t
l
I
I
1
I
I
I
I
ill
I
F
I
t
I
I
-'1
''
i
1T
T
10
I
i
l
I 1111
I
I
II
|1
- -
----Throat
-- -c -I
II
iiI
II
I
I
t
i
I
T
i
i
l
I
1-I
10 1
I
-I
I
T
1
II
I
iti
lil
I
I
I
11
a
F I
~~~~
il
1 0
I
- -Il t
I
I
I
i
I I
I
I
11 1
ii
l
I
1
1|
I
I
i
I
IT
ill
i
I
II
ii
1
I
l
i
I
11
ii
iT
I
1
111
li
t
-1-1-1-
iii
111
I
i
II
1
11111i
I
I
I
I
I
T F --
I 11
1
|
--
1
111T1T
T
103I
-100
1
~~I
I
I
1111111
111111i
1
|
I
I
I
I
|
|
|11
1
|
iti
|11
0
100
101
Figure 3.26: Comparison of the numerical and constant delay TFs for inlet lip J- to Throat Mach number
perturbations.
3.5.3 Transfer Function from Inlet Forward Velocity to Throat Mach
Number
As discussed in chapter 2, the forward velocity perturbations result in the perturbations of
both fast waves and slow waves. Therefore from Equation 3.2, we expect the transfer
function to be of the form:
dMthfto)
du(
=
A'exp(-ftoT,+) + Ath exp(-]t-)
jc)
56
(3.5)
Where:
A
= Amplification of fast waves at the throat
A
= Amplification of slow waves at the throat
T = Time delay of fast waves from the inlet lip to the throat
Ta- = Time delay of slow waves from the inlet lip to the throat
From the transfer functions shown in Figures 3.3 and 3.7 we can estimate amplification
factors for fast and slow waves respectively. The time delays are given in Figure 3.24.
Using this data the constant delay approximated TF along with the numerical TF is
shown in Figure 3.27. Although the amplification factor for fast waves is not constant as
a function of frequency, but still the approximation is reasonably accurate.
Transfer function from forward \el. to Mth
5
-- Numerical TF
-
4-
-- -1 I I ...
F1
FT 1
---
O
I
I
I
I
I
I
I
|
|I
-
_
iI
~
~
_
I
-.-- Const. Delay App. TF
1_1_
.
_
|
|
I 1.I
,1
1.
11_
_ _ _
j
it
-1
J
I
-L -1
-
L LIL.
|I
|i
1 04
~
I
1
I
I|I
|
|
I
- --I
1
1
1 _I
1 _|_
I
Ii
I
I
I
F
.. .
1-j
_I _ J
-
.J.,
l...,....
3_ _ _
-
---
| 11
I
I
102
I
I I I
10
10-
Reduced Frequency
200
I
1
IliiiI
I
I
|
I
|
I
I
|
I
I
II
I
I
1001-I--.
I
O-
l.i.
i
1 11 1 1
I
i i
I
I
-100
I
1
I
I
i
III
iI I I
I
I
I
Jil
I
I
I
I
1111I
I
i
I
I
|I
I
I
I
I I1
I I
II
I
I
I II
1 1 1i
1
I
i i i i
I
I
I
I I*
II
I
I
I
I
I
i
i
I
I
I
I
I I I
i
I
i
I
11I 111I
0
-
I
I
II
I
1
IiI
1
10-2
10-1
1
100
Reduced Frequency
Figure 3.27: Comparison of constant delay approximation to the numerical TF from inlet lip forward
velocity to throat Mach number.
57
3.6 Unsteady 2D Euler Simulation
As discussed earlier the isentropic inlet essentially uses oblique shocks to slow down the
incoming flow gradually and there is a weak normal shock after the throat to get subsonic
flow. The presence of an oblique shock structure makes the inlet flow essentially twodimensional in the supersonic part of the inlet. Thus using a quasi-ID approximation for
the dynamic analysis may be misleading. Thus it is important to use the 2D analysis to
see the effects of the oblique shock structure on the dynamic characteristics of the inlet.
An unsteady 2D Euler code was developed by Merchant [2] and was embedded in
Simulink to study the dynamic characteristics of the inlet. Its interface is essentially the
same as the quasi-ID model and we can use the atmospheric perturbations as well as
characteristic perturbations to get the dynamic response of the inlet in the form of transfer
functions.
3.6.1 Frequency Response Study of the 2D Inlet
To analyze the effects of the 2D flow structure on the dynamic characteristics of the inlet,
a frequency response study, similar to the quasi-iD case, was conducted using the 2D
Euler Simulink model. In this case since we have flow variations along the inlet height,
we must define the transfer functions along the inlet as a function of the inlet height.
Thus we get transfer functions for the throat Mach number at each grid point along the
inlet height at the throat. In order to compare the results with quasi-i D transfer functions
we have to use area averaged transfer functions at the desired location. Different transfer
functions obtained from the 2D frequency response study are discussed in the following
paragraphs.
Figure 3.28 shows the area averaged 2D transfer function from the inlet lip fast waves to
throat Mach number. It can be seen in Figure 3.28 that the area averaged 2D transfer
function, for fast acoustic wave perturbations dJ+, matches very closely with the quasi1D transfer function over the frequency range of interest. At higher frequencies the larger
difference between the area averaged 2D transfer function and the quasi-iD transfer
function is thought to be due to numerical dissipation in the Euler simulation.
Figure 3.29 shows the variation of the magnitude of the transfer function for different
locations along the inlet height. It can be seen that there are large variations in the
transfer function at different locations but the averaged response matches the ID
simulations. Note that in this figure the y-axis is normalized with the height of the inlet at
the throat, therefore 1.0 along the y-axis represents the height of the inlet at the throat.
58
J+ to Av. Throat Mach No.
i
l
0.8
I
I
i
I
I
i
I
t-- 4
I
I
I
i iii
I
I
I
I
-
II
IF- 1,
c 0.6
I
I
i
I
i
I
I1
|
0.4
1
I
I
I
1111
I
I
I
1
I
I
I
II I
I
i
I
i i i
I
I
I
I
i
i i
I
|
i
I
1
i
I
iI
I
I
i
I
i iI
I
II
0
I
-1.I
I
II i
I
1
I
I
I
10
1
I
I
-
I
I
I
11
I
l
l
I
l
1
11
I
-3
I
I
l
i
i
11111
10
iI
I
I
I
i!
g
I
g
I
+ + -'-:
I
I
||
I
i
i
10
-
1
-4
I Il
, II
I1
I
I
I _____
I
10
|
|
I
i
1
1
I l 1 i
-- -1-1-1 4-
-- 1 +#-1
I
i
t
iI
I
I
I
I
II
I
I
I
1
I
I
|
|||
1
|
I -I
- I
I
Ji
I
I
1111
|
11111i
I
I
I 1111
|
I
I
|1
I
I
|I I
I
II
IIII
I
-
|
|
I
t111I -I I
I
I
-
1
1
I
I
41
I
i
11111i
I
i
I
I
I
-
I
|
III
I
I
I
I
0
1
I
I
I
I
-I
I
I
1
- - I
1I
l
I
-0-1
i Ii
I
I
i i
I
|1
|
I
-
14
II
I - I -I
I 1 I 'I
l
|
I|
II
T
II
I
1
1
I
I
F
1
|111
1111
I
T
I
iII
~I
I
,
-I
v
I
I
I
|
i
i
I
1111
|
I
I
11
|
I 1
I 1 1 1 1 |||
I
1 i111
1
I 1
1
i1
1
-2
4-
I-
10
1
I
1
II
i i
I
I
I
|
I
1I
11
|
T
|
I
111 1
I
1
1
ji
|
11111I
1
I
111111||1
I
I
T
III
i i
I
|11 i i t1i1
iI
I
I
I
I
i
s I1
i i
I
- -
--
I
I
iII
11
I I
I
1111111i
I
11 11
I
I
-
11
I
I
I
I
I11 1
1 1 1I 1 1
I
I
-T
-
10
- - - I
-
-
D1ea
I
I
I
-
-1
ili
1
I
-
A flI11
-1,-Irar---
i
I
111
I
11111gl
r
I
11111|[
I Ii
|
?
-
I
10
200
T
fr +I
1
-2
10
1
iI
1
I
II
I
I
i
I
U.-3
00
I
I
I
I
I
I
i i
I
I
1
1
I
I
I
-rr Ir-- -,- I - I -rI -----I
I
I I IT
I
I
1111II
i
I _
I
- --- r- ,
I
1I
I
I1
- -
11 11
1
i1
11I
1
I
I111
I
I
1
I
1
[111iii
Ii
LIIi
I
11
10
100
10
Reduced Freq
Figure 3.28: Inlet lip dJ+ to area averaged throat Mach number transfer function and its comparison with
quasi-ID case.
LL
3.5I
3
I
IL
r
-
0
..
2.5
0
1
1
L
L
-
00.5
Height
.4
-0'
0.8
0.6
-0.2
nit
0 3
-.- '
0.1
0.2
0
non
0
Figure 3.29: Inlet lip dJ+ perturbations to Throat Mach number perturbations and its variation along inlet
height
59
-
I
I
-1
- 1 1
For the slow acoustic waves Figure 3.30 shows the transfer function from inlet lip to
throat Mach number. Again the area averaged solution matches closely with the quasi-ID
case over the frequency range of interest. In the 2D case the phase delay is higher as
expected; since in 2D the perturbation wave actually has to pass through a number of
oblique shocks, a little bit longer time delay occurs due to change in the flow direction. It
can be seen from Figure 3.31 that the throat Mach number transfer function magnitude
for slow acoustic waves varies considerably along the inlet height. But still the average
effect resembles closely the quasi-iD transfer functions. The variation of the transfer
function over the inlet height is similar to the fast acoustic waves.
The frequency response from the upstream bleed perturbations to throat Mach number
variations is shown in Figures 3.32 and 3.33. The area averaged value of the response can
be seen to follow closely with the quasi-iD results, at least over the frequency range of
interest. From Figure 3.33 it is clear that the upstream suction has greater effect along the
inlet height where the atmospheric disturbances have the highest magnitudes of the
transfer function. The variation of the phase as a function of inlet height and frequency is
shown in Figures 3.34 and 3.35 for J+ and upstream bleed perturbations to throat Mach
number. These figures again show that the control effectiveness follows the phase
variations (except for a sign reversal) due to atmospheric perturbations. Thus variation of
the effect of atmospheric disturbances along the inlet height is not an issue, since the
effectiveness of control also follows the same variations.
J- to Av. Throat Mach No.
I
3
2.5
1
I
- -
I
-
-
11
I
lii
-
-
-L-l- 1
-l-l
I
I
I
i
0 .I
1 1i
-
I 111
I
1
I
l
i
II
II
-il
il
I1 I
I
I
i
|lil
I
II -
111
1
I
4
- -I--- - - - -
I
i
i
1
1
1
I1
1
1
I
I
- -t I
I
l
I
I
I
1
I
I
1I
Qusi-ID
1
|1
|
I
iI
1
.1
|1
---------------1 1
I1
-1- ---l I I I I iii
4-5l---------------
lil
Il1
~
|
-----
Ill
I
I 11
|
I
11I1Il
.
AreaAv.
-2D
- .1 I-6,
1-I.
I|
|I
I
- - - - -- -
-
I1
-
II11
-
-4
- 1-141.--
-4 -4-1-
I
--
L--LL.1-
"!-l- I
I
I|
L
l-
I
I
; 1
1 11
-
2.5-- - L IL
-
2
I I
I
1111
I I1I 1 II
I
i
I
i
1
I
I
-
1
1
I
I
I
I
0
100
10
102
103
101
200100
1
-
1T0---I
I
IT
I
I
cI
T -
IT
----
I
l
I
|--
I
I
I
I
I
111 I
I
I
I
I I
-200,
2-
10
~i
1 1
il
II
I
i
i
-
II
5
i
I
1 5 1
I
~jI
I I I
I
T
T
I
-i
1
I
I
I I
I
i1
:is
I I
-i
I
I
I
Il
it' ol
I
-2
10
I
11
--
-I
I
l
--
-:-I
I
--
I
111| 11I
4-:--:
-100 - - - -
II
III:SII
I
F
III
l
-
i
11
10
i
IIl
Olli
11
10
10
Reduced Freq
Figure 3.30: Inlet lip dJ- to area averaged throat Mach number transfer function and its comparison with
quasi-ID case.
60
L
IL
*0
0
0.5
1
V
--
0.8
Ne0.6
0.4
0.4
g
0.2
0.1r0
0.3
ed
0.2
- -
0.4e
0
Figure 3.31: Inlet lip dJ- perturbations to Throat Mach number and its variation along inlet height.
Upstream bleed to Av. Throat Mach No.
2D Area Av.
Quasi-1D
I I
11111
1,
10
I
1I
|
I
IJ
I
11111I
I
|
|
I
5
I1
1111 |
I I
1111111
L
| LI
|
|
|
i
I I
I
|
i
I
I
I-I
Ii
I
IIi
I
I
111111[I
I
li
I
I
I
|
i
I
1
I 1111
i
i i
I
l
I
1
11
i
I
I
I
Ii
I
!
S10
I|
I
I
I
I
I
I
I
i
1
I
I I
I
I
I
I
|
I
l
I
I
I
III
111
il
i
11I
I
I
I
I
I
I
I
111
I
I
I
!
i
I
|
11I111i
I
I1
!
|
11111iii
I
I
II
L L
I
i
|
1
I
II
I
1
I
I
I
I
I
.
t
I
I
IlI
1
I
I
0-2
1
I
I
I I
1i
I
ii
111
1
I'
I
I
---
SO
1
YI
"
I
I
-
I
11111
I
I
111
1111
I I IiIi IJ
-
11I
111111
1-3
I
I
1
I
I
i
II
I
1
1
111'1
|
|
II
11I11111i
I 11 1
I
I'r
I
I
1 11
I
I1
II
|
I
I
i
I
111I111
I
I
Ii
I
I
I
I
I
I
li
I
|
|
I
I
Il
Ii
i
i
|I
01
10
100
0-1
20 0
100
ai)
CU
I
0
a-
I
----
I
I
I
T-- Fr
1
I
I
I
I
I
r-~
-i-rT~~~rn
---I ,--,
1
T T I
I
I
IT
I
1
1T
I I
1
||7
I
i I -1 - - T-1- I
~~~~~~~~~~
L -
il
I
1
I
, -
NI
I
-,r
% I
I
%
I
gT
I
V II
I I
I
I
I
I
III
I I
II
I I
li
-I r T - -- ----- I-- -F-,I -- II ------I - -i IT
I - I||
-100
-200'
-3
10
10-1
10 0
101
Reduced Freq
Figure 3.32: Upstream bleed to area averaged throat Mach number transfer function and its comparison
with quasi-l D case.
61
2018--3 16
112
6-
-
11
-
4
2
0
1
0.5
0.4
0.8
.
0.6
HegtaigUe
O.3
-0--'
iet
04
0.1
0.2
0
0.
ed jced Ve
0
Figure 3.33: Transfer function from upstream bleed perturbations (using symmetrical bleed) to Throat
Mach number and its variation along inlet height.
S20011- 100,
0
-300
-
-
L -100
"-200
1
o 400
N.
-C71
|)
0
O~-2-'0''40
0.8
0.5
0.4
tv 0.6
050
0.4
'.3
0.2
.2
'0.2
0.1
0
.e-
0
Figure 3.34: Transfer function phase from J+ perturbations to Throat Mach number and its variation along
inlet height. (Phase is shown unwrapped.)
62
5
200
0
-200
0
0,
-,
-
........
-600
0.8
60.5
A/. 0.6
6
0.4
0.3
0.4/,
0
4
0.1
0
0
Figure 3.35: Transfer function phase from dbl perturbations to Throat Mach number and its variation along
inlet height. (Phase is shown unwrapped.)
The plots shown in Figures 3.32 and 3.33 are generated by using a symmetrical upstream
bleed, i.e., a bleed slot at the top wall and also at the bottom wall is used. If we just use a
bleed at the bottom wall then the result is shown in Figure 3.36. It is clear that using an
asymmetrical bleed results in much higher control authority in the bottom half of the inlet
throat and a minimal control authority at the top half of the inlet throat. In contrast, the
disturbances have large impact on the throat Mach number at the top half of the inlet
throat; therefore using an asymmetrical bleed would not result in the response predicted
by the quasi-ID simulations.
Frequency response plots for the inlet lip entropy perturbations to the throat Mach
number are shown in Figures 3.37 and 3.38. Again it is clear from the figures, the area
averaged results of the 2D simulation match closely with the quasi-lD results over the
frequency range of interest. The variation of the transfer function magnitude along the
inlet height at throat is also similar to that for the previous transfer functions.
63
25-
2
20I--It
Z
I
I
'
I):
.0
10-
5
0
%0
0
1 0.7
0.80.
h-eight
0.5
- -O.4
ab0. 0.14
rgte ihlet
0.3
e
gedu-ed v%
0.2
0.1
0
0
0.2
Figure 3.36: Transfer function from upstream bleed perturbations (using bottom bleed valve only) to Throat
Macinumber and its variation along inlet height.
Entropy to Av. Throat Mach No.
6
-
---
~T --
r
-1-
I
I
T
T
II111
I SI 11
1111111
I
F
11
1
T
T
I
~^
i
I
F
|
I
I
~~-l~~~F T~ T
III1111
1| I
I|
i
1
I
11111
-
-
i
1
-
I
06-
-
FTf1~
I-
-
e"
~ 7-1-1
I
T
-
I
I
11
-,
I
7 1-~ T
1|1
1 I 1it
It
i II
1
1
T
I
1|
|
1
|
1
I
I
10
i
-200-
-
---
|
I
1
I
I
I
I
L
1
I
1
|
|1
1
I
1
I
i
I
1
i
I I
11
f
transfe
1
I
1
1
11L1
I
1
I
I
I
|
I and .'I
iI
I
I
111--
I
1
Ii
its
1
10
1
\
I
11
1
j
|
A
I
|I
1
1
I
I
I
11111
I
I
I
I
I
lf
ilg
1
lli
sIg
10
I5I
l
!
jf
I
i itcoimpariso
|
I
I
I
I
I
10
I
I
|llll
I
I
1
I
I
I
I
I
1
I
I
I
I
100
1o'10
|
i
I|
'
'1''
g
I
il
i
Il
i
ib
gf gilt
l
I
I
Ig
t
I
1111
I
I
|
g
1
I1
'
I
lI
1111
11111i
1111
1
iS
1
1
111||
i
|l
'
1
1I
I
I
I
I
I
I
i
I
I
I
I
I
1
T ~l n ~
I11|1|1
i
IllII
jili
lil
1
~~~ -F ~
I
|
*I't'l'
1
|||
ii
I
i i
I
I
1111|1111
1 1 | 1 lil
i
i
-
T
I
Ir%-12~lF~f
I
i
1111
|
I
i II
'
'I''
-200L -1 0 I
I
111111
CAP
0.
I
I
11111Il
S
I I
FFO
I
11l
I
T
2D AreaAv.
J-1
I
I I
I
I
I
I
I
1
|
|1
I II
t
Iill
10
11111i
1 1
DI case.
i i
I1
i
1
1111
101
Reduced Freq
Figure 3.37: Transfer function from inlet lip Entropy perturbation to area averaged throat Mach number
transfer function and its comparison with quasi-1D case.
64
I
16
84
a)
0
0.
80.4
*00
Figure 3.38: Transfer function from inlet lip Entropy perturbations to Throat Mach number perturbations
and its variation along inlet height.
3.7 Inlet Unstart Mechanisms
As far as the dynamic behavior of inlet unstart is concerned, an inlet can unstart in two
distinct ways. The disturbances that affect the shock directly, such as fast waves and
entropy disturbances, tend to move the shock considerably, depending upon the
magnitude of the disturbance, from its mean position. Thus a negative going fast acoustic
wave pulse can cause the shock to move upstream towards the throat, as can be seen from
Figure 3.5, and if this disturbance persists for enough time it can cause the shock to move
forward and hence come out of the inlet completely, causing the unstart. Such an event is
shown in Figure 3.39. A negative going fast acoustic wave step of magnitude 0.04 was
used in the simulation, with controls off, to generate the response shown in Figure 3.39.
Note that in this mode of unstart the shock continues to move upstream and as soon as it
passes the throat it accelerates and completely comes out of the inlet as shown in Figure
3.40. This figure clearly shows that the shock continues to move towards the throat and
its velocity increases with time.
65
2.4
-
S-
2.2-----------
--
14- -- -- ---
082-
--
--
--
0.4
-L--------- --
-+---
--
--
0
-1
- - - -- -----
-
--
-
2
1
- - - -
-
- -- - -
--4
-
-
- -- --
-- -- - ---
-- -
-- -- -- -- -- -- -- -
-
-- - - - + ------
4
3
-- - - -
- - - - - -- - - -- - -
- -
I
------
-T -
-
--------------
-
- --
-
--
l-
1- -- -- -- -- - -- - -- -
- -- - - -------
-----------
----- -- --- T ------
Nominal Profile
About to unstart
- - - -- -- -- - -- - --
--------
- - - -- -- ----- -------
- --- -------1.4 -- -- - - - -- -----
1.2
--------
,----------------------
-------- - - -----
2.2 ---- ----
1.6- -- -- --
------
-
---
- --
--
--
--
--
-
6
5
X position along inlet (non-dimensional)
Figure 3.39: Mach number profiles for different time instants during an unstart event. The shock is moving
towards the inlet lip due to an incoming atmospheric disturbance. Unstart due to shock motion.
4.5,
8
8l
0
10
20
30
50
40
Time (Non-dimensional)
60
70
80
90
Figure 3.40: Location of the shock as a function of time for the unstart event due to shock motion.
66
There is another way in which inlet unstart can occur. The slow acoustic wave
disturbances, J-, have much stronger effect on the throat Mach number than on the shock
itself. Consequently when a pulse of slow acoustic wave disturbance hits the inlet, it
tends to change the throat Mach number. For a negative going slow acoustic wave pulse
the throat Mach number decreases, as can be seen in Figure 3.7. Therefore, for a strong Jdisturbance, the throat Mach number may drop below 1, while the shock behind the
throat has not appreciably moved. In this case a new shock forms at the throat and starts
moving upstream as shown in Figure 3.41. The formation of the new shock is clear from
the Figure 3.42, which shows the position of the first shock in the inlet. Figure 3.43
shows the 2D shock structure with a new shock just formed upstream of the throat.
From this discussion it is clear that in order to prevent the inlet from unstarting, it is not
sufficient to keep the shock position stable. We also have to control the throat Mach
number and prevent it from dropping below unity.
Another important factor affecting the shock motion, other than atmospheric disturbances,
is the exit pressure perturbations due to the compressor. If there is a sufficiently strong
positive going perturbation in the exit pressure then it can also cause the shock to move
. .
24
1~
Nominal Profile
--- About toi unstart
2.2 k
-
-I-
- --
-
-
-
-
I - -
- -
-
2
1.8 [
-
-
~--
- - -
1.61 -6
z
1.4 k
1.21-
-
1
0.8k0.6
0.4
_1
0
1
2
3
X position along inlet (non-dimensional)
4
5
6
Figure 3.41: Mach number profiles for different positions of the shock. Shock is moving towards the inlet
lip due to incoming atmospheric disturbance. Unstart due to new shock forming at throat.
67
1.5
-----
2
0 .2.5-- -
-
-
--
--
-
----
-
- - - --
- - -- ---- -- -- -- --- -- - - - - - - -I-- - -- -----------
01
0
10
20
30
I
-
--- -
--
--
- - -- - T-- - ---
- - - - - -_-_-_-_
---
40
50
nme (Non-dimensional)
60
--
90
80
70
Figure 3.42: Location of the first shock as a function of time for the unstart event due to shock motion.
S
I
I
III
Contours of Mach No.
0.5
1.5
-
S
0
0.
0
I
1
0.5
I
II
I
I
I
I
I
1
1.5
2
I
|
1
111
70 40
30 205 405
1015
I
I
II
2.5
3
3.5
4
50.9
4.0
4.5
5
5.5
x
Figure 3.43: Contours of Mach number for the unstarting inlet due to new shock formation.
68
upstream and unstart the inlet. In this report the effect of atmospheric perturbations is
considered mostly and effects due to exit pressure perturbations are generally ignored for
the purpose of limiting the overall scope of the thesis.
3.8 Bandwidth Requirement of the Actuators
An important parameter from the point of view of the control system design is the
bandwidth requirements of the control system and actuator. It can be seen from the
transfer function plots (qausi-ID) of the atmospheric disturbances that the inlet has a flat
response over reduced frequencies up to 1. The inlet actually tends to amplify the entropy
perturbations for higher frequencies. Thus it is apparent that the atmospheric perturbation
cut-off, rather than the inlet itself, sets the bandwidth requirement. From the previous
chapter it is apparent that most of the atmospheric turbulence energy is concentrated at
lower frequencies. Thus we see from the results that a dimensional frequency of around
25 Hz (corresponding to a non-dimensional frequency of approximately 0.11) is the
upper cut-off as far as the atmospheric perturbations are concerned. Thus the bleed
actuator has to have at least this bandwidth in order to cancel the affects of atmospheric
perturbations. Equation 2.32, in chapter 2, gives the relationship between the full-scale
frequency and the reduced frequency. Using this relationship, we can calculate the nondimensional bandwidth for a simulation or for a wind tunnel test.
3.9 Throat Mach number Variations due to Characteristic
Disturbances
From the 1D Euler simulations we have the transfer functions from different atmospheric
disturbances in characteristic form to the throat Mach number as given in the previous
sections of this chapter. Using these transfer functions, we can estimate the effect of
atmospheric disturbances on throat Mach number without control. The modified spectra
for each atmospheric disturbance in characteristic form are shown in Figures 3.44 to 3.46.
These figures show the original PSD for each of the disturbance in characteristic form, its
modification due to ramp control and Mach hold system and also the resulting spectrum
of throat Mach number variations. The vertical lines in these figures show the range of
frequencies that are significant as stated in the previous section. Using these spectra we
can calculate the RMS values of throat Mach number variations due to each type of
disturbance. These RMS values are tabulated in Table 3.1.
From this table we see that, for throat Mach number, the most dominant or important
atmospheric disturbance is J- or the slow acoustic wave. Although the entropy
perturbation is large at the inlet boundary, it is attenuated by the inlet itself by virtue of its
design and thus has only about 1/ 6 th of the impact of the J- disturbances. The only
69
disturbance that is significantly amplified by the inlet is J- disturbance and thus it is the
disturbance that needs to be controlled most effectively for throat Mach number control.
RMS value of Mth (x1O)
Disturbance Type
J+
16.2
J-
48.3
Entropy
8.7
Table 3.1: Estimated RMS values for throat Mach number variations due to canonical atmospheric
disturbances.
- - -Original PSD (J+)
It
I -
100
II
1
0
102
[
I
I l ilt
I I |i l t
I
| l t
1I i ii
II
i
I I I l il1
iIi I iii
I
I
I
I I |l
I
i
1
i
0
-----
|i | I l
|
Ii
C
E
-
I I II
I
C
--
I
|
I
i lt
l Ii ll
-
I I
I
I
I
-i ---
lil
I il t
I It il l
l
1
l1II
11111 l
I
Wiroat Mach No. V riations
.
.
I
i
ii l
I
I I
I II i
I
I
I
I
l
I
l
I
l I
i
I
-
I
i
I
I
III
l
Ii IIi
II
I I
|
I
I I I III
:
I
I I I
Il il t
I
I
i
I I lit
I
I
I
i
[
I I
|1
I I
11 1| li l t
1 1 11 1
I I I
I
l i l tI I I
i
I
!I I
I I 1 1I
I I I I I
Z
|1
| |
|
|
CO
I
1|1 F||
I
F 1-I
I I I
1
II
F
I I
I
I l 1i 1l ti
lt
l
ir
-
1
1I
i
I
Tl - - -
7 I I -1 1 F
i I I II lIllii l t\
1
1
-3
10
102
Reduced frequency (Hz)
I
I
i 1 1
10-8
10,10
II I
I
"i~~
10-6
I
I
l i lt11
| |
1
1
F I%
|I
I
1
1 1 l
I
l
____________
1011
100
Figure 3.44: Throat Mach no. perturbation spectral density for (worst case) J+ disturbance at the inlet
upstream boundary.
70
I I
1
-
1|
I
|
|
I
I
I
I
I
1 F
L 10
FIF-
II I
|
II:
F
F
-
I 1 1
1I 1
I
F1 I
1t
I
ii
F
t
lI
li
lt
I
1
|
F
ll
I
I
1
I1
I I FIIlF
T1
1
F
||F
FIt
F
10
-
-
-
MI .
u
T1
T1 1 T1
11
F
I
I11
-T
I
F 1
-
_
10
-
T -
---
__
_
-
_
10
0
0i1
01
|0
-4
10
-
1
I
t
i-
J i l l l1F
F
F
I
11111|1
|
11I1111
-
I
iF
4 k
Fil l I
|4
t
|-
I/
11 T IF F
I i
F
1
|1
r-
il
- -n
|
ICFil|
F
~~~~
10
10
Throat Mach No. Variations
FTIFi
u
10
t
I I
1
[
I
|
i
I
2'
C
1 1Or1 ---Oiginal PSD (J-)
- - With Ramp+Vel hold
--...
_
-
-- -
'-
I---
10II [ I
0
1.11.1I
- -
- -1111-
-
10 0 -- - - - -
I 11F-A
11F
Reduced frequency (Hz)
Figure
3.45:
Throat Mach no. perturbation spectral density for (worst case) J- disturbance at the inlet
I~~upstream
Il l il
I iltt
boundary.
I
II I J i l I
I I J i
I I I Il
2
1 1
I
1,1I
)
0
1
I
1
II
I
F
lilt
I
1 1411
I lilt
11
1
100
i
l
F1 111I F
F 1111 i 1l
I
I I
[ -
I I
I
I I
I I
1
11111
______ll
11111
I
1---1
-
I lilt
II
I
F I
F lilt
F 1111
1 1 [
I
I I
I I
Origina PSD (Entroy)
I
lltF
I
tI
1 hold
Throat Mach No.Variations
Wit R .. mn4-V
I I
I
I
I
I
I F II l
I
l
I I
I
I
ill
I
I
0
L
- -
100
I
-s--
-
-
-
W it
-I
I
Ra p+ e hold~--
Reduced frequency (Hz)
10
10
10
7 11- - I l
10
10
I
Figure 3.4: Throat Mach no. flperturbation
spectral density for (worst case) ntop disturbance at the inlet
0-2
I
-1
- Tupstream
Tboundary.
T --: T1 rrr
L
I
I
l
I-
I
IF
1|
1|0
EI
I I lilt
1
|
C
0
~ ~
i
~
Reue
i
I frqec
3.6 Thoa Mac no| pert1baio spcta dest
|
1bIundIry.
upItream
I
Figure
I/_____II
|1
71
10
[
||
(Hz)1II
fo (wrs
|0|
lae
Enrp
ditrac
at th
in[et
[
l
72
Chapter 4
Control System Design and Testing
By examining the dynamic response of the inlet, we have shown in chapter 3 that, in the
range of the frequencies of interest, the quasi-i D and area-averaged 2D transfer functions
are almost identical. We have also shown that a symmetrical bleed implementation gives
us control authority that closely mimics the non-uniformity of the atmospheric
disturbance transfer functions across the inlet throat. Thus the frequency response of the
inlet is represented well, to a good approximation, by quasi-i D simulation. Motivated by
this observation, it is reasonable in this initial study to base the control architecture
design on the quasi-1D simulation results, as it is easier and simpler to work with ID
simulation. Then the designed control law can be tested and verified in the full twodimensional simulation.
As discussed in the previous chapter, there are two unstart mechanisms. Thus we need to
take into account both of the mechanisms in order to prevent unstart. So the control part
can be subdivided into two distinct parts, namely the throat Mach number control and
shock motion control. Although the throat Mach number is controlled by the upstream
bleed, that also helps to some extent in the control of the shock position and shock
position control is done using the shock bleed that in turn also helps a little in the control
of throat Mach number. But these effects are only secondary and to a first order
approximation we can ignore them. This results in a decoupled design of control laws for
throat Mach number and shock position and simplifies the problem.
4.1 Throat Mach Number Control
As discussed in the previous chapter, atmospheric disturbances can change the throat
Mach number significantly. Thus throat Mach number may increase, pushing the shock
downstream and reducing the inlet efficiency. Similarly the throat Mach number may
decrease, resulting in shock motion toward the throat and eventual unstart. Both of these
are undesirable and must be controlled to enhance the robustness of the inlet. We can
control the throat Mach number by using the upstream bleed perturbations as mentioned
in the previous chapter.
The upstream bleed perturbations result in mostly slow acoustic waves, as can be seen
from Figures 3.17 to 3.19 and Table 3.1 in chapter 3. From the speed of the propagation
of the slow acoustic waves, we can estimate a time delay of approximately 2.0 nondimensional units. Therefore, a feedback control loop can be used to control the throat
Mach number at very low frequencies. In a natural setting, this problem is a disturbance
73
rejection problem and a feedforward control is not only natural but much simpler to
implement as well. Feedback control can be used on top of the feedforward controller to
add robustness to the system especially at low frequencies. In this section a feed-forward
control implementation for the throat Mach number control is discussed.
We can design a feed-forward controller based on canonical disturbances, namely J-, J+
and entropy, or we can use the atmospheric disturbances directly. We will discuss both
approaches and controllers implemented using both techniques will be presented.
4.1.1 Throat Mach Number Controller Design Based on Atmospheric
Disturbances
The response of an inlet to forward velocity atmospheric perturbations comprise both
slow acoustic waves and fast acoustic wave perturbations. Therefore, by using forward
velocity perturbations as our prime disturbance to be controlled, we can account for both
J+ and J- perturbations. Moreover, since J- is the perturbation that we want to control
most effectively, using forward velocity perturbation also satisfies this requirement.
Using a static pressure sensor upstream of the bleed to estimate the Mach number
perturbations, the feed-forward control architecture looks as shown in Figure 4.1.
Normal Shock
dPe
du,dvdT
A14A I..
r-
Upstream Total
Pressure
Measurement
Figure 4.1: Feed-forward control law architecture, for throat Mach number control, based on Mach number
estimation at the sensor.
The change in throat Mach number due to upstream forward velocity perturbation and
upstream bleed perturbation is given as:
74
dMth
dMth
du
du+ dM'h dbl
dbl
(4.1)
Here du is the forward velocity perturbation at the inlet face and dbl is the upstream
bleed perturbation.
We can write Equation 4.1 in frequency domain using transfer function notation as:
dMth
=GMth_du
(jco)du + GMth _db1 (jco)db1
(4.2)
Here GMth duc) is the frequency response of the inlet from the forward velocity
perturbation to the throat Mach number and GMth_dbl] ( w) is the frequency response of the
inlet from the upstream bleed perturbation to the throat Mach number.
The bleed value can be written in terms of a postulated controller as:
dM
dbl = KdM, = K A du
(4.3)
In frequency domain using the transfer function notation:
dbl = K(jco)GMs du (jw)du
(4.4)
Where GMsdu(go) is the frequency response of the inlet from the forward velocity
perturbation to the sensor located upstream of the bleed as shown in Figure 4.1. The
sensor has to be located upstream as far from the bleed as possible. Locating the static
pressure sensor far upstream of the bleed gives enough lead time to the actuator to
respond to the incoming disturbances. But we cannot place the pressure sensor too close
to the inlet face as it reduces the pressure sensor sensitivity to the incoming disturbances
as shown in Figure 4.2.
Substituting Equation 4.4 into 4.2 we get:
dMth = GMh
-du(jco)du
+ GMh
75
db,
(jO )KGsdu (jw )du
(4.5)
Forward Velocity to Pressure at different Sensor locations
---0
4
-at
-- ---- ----- - -
0.05
0.0--
-
--
-
I
cu 0.03
-- -
-I
I-
1
I
|
--
- i
1
I
I
-
--
0.02-- - --1
Ilii
I
-
-- -
-I
--
Il
-
I
0
--
-
ill
t
111I
-- -1
F
-
-
I
-
L
I
I
r
7
|i
T-
I
I
--
100-----------
T -i i i
I,-
J
IL
J,
------
I
I
I
-
--
-I
I
II
I
i
-
.1LI.I-
I
I
-
rrr
-----
101
102
104
II
Ii
- - -I
I - -I,-L--
,
I
-
I
-I -i-Ii
T - - -i
----
-
100
10-1
102
-100---
I
~
- - -
TI
0
I
I-
I
103
--10
I
--
- - -
I
- - - -111
-
X = 0.275000
I
1---
- --- -
atX = 0.550000
-
--
-
-
-
-
I
-
I
.L
I
L-
100
Reduced Freq.
Figure 4.2: The sensitivity of the static pressure sensor at different sensor locations along the inlet.
For perfect cancellation we want:
(4.6)
dMth =0
From Equation 4.5 we can solve for the controller K to be:
K=
GMth d(IC)
GMh dbl (j)GMs du
(]o)
(4.7)
From Equation 4.7 it is clear that the controller transfer function, K, depends on the
inverse of the transfer function from bleed to throat Mach number and transfer function
from forward velocity to Mach number sensor. Thus if these transfer functions have nonminimum phase behavior, i.e., they have right half plane zeros, then the controller gain
would contain right half plane poles and would be unstable. Also, if the transfer function
has more poles than zeros (strictly causal) then its inverse will be acausal and therefore
would not be realizable. Thus there is an issue of realizability and stability of the
controller filter. That is the main reason for using the Mach number sensor to sense the
upstream perturbations, rather than using the pressure sensor value directly. It was
observed that if we use the pressure sensor value directly then the filter is very difficult to
76
realize due to non-minimum phase transfer functions. Also we want to place the pressure
sensors as far as possible downstream from the throat, near to the inlet lip. This provides
sufficient lead time for the actuators and the extra delay in the transfer functions makes
the realization of the filters easier.
From the quasi-iD transfer functions for the inlet, shown in Figures 3.13 and 3.16, we
can get the desired frequency response of the feed-forward controller. The desired
frequency response of the feed-forward controller along with its realization, in both
continuous and discrete cases, is shown in Figure 4.3. The realization was done in the
continuous domain by doing a least squares fit, by a filter with the specified number of
poles and zeros, to the desired frequency response. In the realization shown in Figure 4.3,
a filter with 4 zeros and 5 poles was used to fit the desired frequency response data over
the frequency range of interest. For the realization shown in Figure 4.3, a frequency range
up to 0.4 was used, which is well beyond the highest frequency of interest. We can use a
lower value for the maximum frequency, but unfortunately the resulting controller would
be unstable. The Matlab command "INVFREQS" implements the least squares fit. Once
the continuous domain filter is obtained we can transform it to a discrete time filter for
testing in the inlet simulation. The discrete transfer function shown in Figure 4.3 was
obtained by using a sampling frequency of 8.8 (corresponding to a dimensional sampling
frequency of 2000 Hz for full scale inlet) and assuming that the inputs stay constant
during each sampling interval (a zero-order hold approximation). The Matlab command
"C2D" implements this transformation from the continuous time domain to the discrete
time domain.
Figure 4.4 shows the pole-zero map for the discrete realization of the controller. It can be
seen that it is stable as also shown by its step response in Figure 4.5. Note that the
controller is realized well beyond the highest non-dimensional frequency of interest of
0.1.
We can see the effectiveness of the feed-forward controller in canceling the effect of
incoming disturbances to the throat Mach number by plotting the frequency response of
the incoming disturbances to the throat Mach number with controller and without
controller. These plots are shown in Figures 4.6 and 4.7. The controller reduces the
perturbations to throat Mach number due to forward-velocity and vertical-velocity but is
not that effective, especially at higher frequencies, at rejecting temperature perturbations.
We will discuss the implications of this in the next paragraphs.
The ineffectiveness of the controller for higher frequencies for temperature perturbations
is not surprising, since we ignored the temperature perturbations in the design of the
controller. Temperature perturbations comprise all three characteristic types, namely J+,
J- and entropy, as discussed in section 2.3.3.
77
Frequency Response of the Feed-Forward Controller
0.5
0.4 k
o)
0
0)
T T rn-
1-
---
-T
-1
n
-
I
T
F
1
T
F J. IL
--.
0.1
0
-3
1
I
-I F
F
I
I
|.
1 L
I
I
iI
11
FI
1F
F
F11
~
11
1 L
1
F
F
I
I
F
F
-
L
F
I-
IT
I
-1
|
I
I
I
i
1
i - -- -
i-L i
0
10
I
|
I
I
I
IT
|I
F
I
F
L
\,
-2
I
Fi1I
1~~1
0102
-- Desired K
Cont. Realization
-- Discrete Realization
I
0.3K0.2 k
---
cTT
i ii
-
1J
r
-,
r
II
I
1
10
200 ,
I
I1
F
-- - - T
100|
11
1
1I1I1II
r T 1T
F
1F
I
IF
LLI
|111I1
I
I
IT
ITIT r
11 - -T
F
11
I
111
1
1
II
I
1
TI
I
|I
I
F
FL 1 F I
II
I
F
FI
-1
|IT -
i
l
F
I
I
F
LII|
F
I
F I
|F
0
a.
I
I
I I
-100
II9
I 1
11
-200
-3
11
1111
IF 11
F
F
|1
I
IFI
I
1
1111
F
F
F
1111
F
F
F
FFF
|
1
111
F
i
I
IFI
I
I
I
I
I
-
i IF
i
I
111I
I
-
-
- -
I
I
|
100 0
10
10-1
Reduced Frequency
Figure 4.3: Frequency response of the feed-forward controller and its realizations.
Pole-zero diagram for the discrete realization of the controller
1
0.80.6-
0.4 x
CL
0.2x
0
XL
-c
E
0
x
-0.2
x
10
-0.4-0.6 F
-0.8
-1
-1
-0.5
F
F
FLLLLL
10-2
10
I
0
Real Part
0.5
1
Figure 4.4: Pole-zero diagram for the discrete feed-forward controller.
78
10'
10
10
Step Response of the discrete realization of the controller
02
-
0.15
o
C
E
0.1
0
0 05
if
0
I
.1
-
ii
.0.05
0
0.02
0.01
0.03
0.04
0.05
Time (non-dimensional)
Figure 4.5: Step response of the discrete feed-forward controller.
du to Throat Mach No.
du to Throat Pressure
5
i
-
with cont.
w/o cont.
---
4
cu3
I~
l
li
1
rrnn-r
F r
I
I
i
II
I
1T
11
11
I I I1I]II
i
i
1
-- r
F11
I
I
iT
i
I
I
I-
I
I
I
I
-
I
1
a)
II
IlI I I11111ill
I 1ilt[
[lil
II1I
I
0')
,
-
I-
-II
i T II
I I I I 1
1
I |I 1
111111 1
|i
~
I
1_ 1
1
I
,
LI
I
IL
IL L
I
,
,
I l
IL
-3
10
I
I
I
I
10
I I 1 11111
1
I I I I Hl l
100 - -1 1 - TII
1
Ir
|
[
II
I
I
Tr
n
444
-1
I
0
10
(o
10
|
|
|
II
I
I
I
,
I
1
I
U
gI
Il
-200
-3
10
I
-20 1
I
10
F
S1
1
II
r
t
-
nrr--r11
r
II~
f
Irr
I
I
F!11
Ai
-2
[
-1
10
0
10
10
91 1
iiii
-
n nr\
i -i} -
J
-
I
I I
'" j III
10
I'
-1
I
I
|lilt
'I
'
'
0
P
1111111
1i
111
it
I
1I
-2001
0-3
10
Reduced Freq.
10
-2
I
I
1
I
I
11
~I
I 1111111 I
--100111 -1L _ 1%11
IIll
I
111111
I
-2
I
~ ~
f
%
s
i
g
(D
I
1111in11
I
'''"111
f
F
-rr
I
ll1
100
0
i
~
O
11111 11
-3
a.
-
I
i
llitt
II
200
Hl
CA.
-100 -
~~
i 1l, 11
li
I
I I I
Reduced Freq.
1 11
ll
I I 1 l
9 I
rrr
n 17A
1
i
I
1
-2
ll
I I Ii
I I
mr -,
-
Reduced Freq.
200
I
111111
I Ililt
A
10
t 1
-,
I,
,
I
II1 1111 111
i
S
0.5 F
~ I I 1it ll l
I 1 11111
1ill
I II
'0
I
1
11 ilm
II1
1111
I1
M ill
T
iII
-C
m2
I I I lilt
I 11111
w/o cont.
I
il
0i
with cot.
-
---
11
I~
;I
1II~
111uiil *
l
I
II
I
1
10
-1
Reduced Freq.
Figure 4.6: Controller effectiveness for changes in throat Mach number and pressure.
79
0
10
dv to Throat Mach no.
dT to Throat Mach no.
---- with cont.
with cont.
-
w/o cont.
TmT --
3
- -,
-
rn
-
I I
|
T
r
2lI
0
II
Hi1
I
I
Ii
I 11Il
[i111
llt -2
113
111111
I
I
I
I
'
'II'
lll
I
I
Iil
I
I
II
IIII
lj:
Ii
i i i iI
I
111|
I|I I1
Ill1
I
_ _ _ j*I
I
I
l ilt
I1
1
I
I|
Ii
I I
I
Nil
10
10
Reduced freq
III
I II 1 ll
|I 11illl|
Il111
Ill11
!
1I
I I i ll
I I
I I i t .. . I
I
I
I
I
t
1
f
I i i i Ii i
I I
il
I
I
I
I *I
I I
l
I
100
It
11
i
I j t i i!5
111
i
0
t
ImI
IF
I1111
I
|
|
1 I
|II
I
I
I
I
I
II
Il
11111I1Ill
llII
|
|
I
I I I1 1
1 I II
1
n
--
-
-11-
100
I
I
I
I
I
I
I
-
I-
100
(0
-c
II
II
0
||
0.
SI I
1 1
|ilt
I
I
I
I
I
900
10
11L
-
-100
'
10
I
TA
I
III
i
II
1111
"'
10L
!
'I
I II I II
-200
-
I ||
10-1
I
L
I lUILA
- -I
1!1 1 -
I
Ill
1Il
I
I
I
iI
03
-
-100 --
I
1
i I
I
i
4 I4 I
-~
I II I
I
I II
1
I
10-
I
1 |III
I|
F
|
|
i
I 1111
I
200
111
I
I II I
Reduced freq
200
0
I
ti
Il1
1111111
I I
I
I
I
iI111111il
tI
1
I
I
I
103
100
II
1IIH
1|| 11
i
II I I~
I
iI111111
I
~-
|
0
"
l1
|
uI I
I i-1
I
il
I I I
Ii
I II 1 1
-f--II11 i-41-4
-I -I-4M
1--141411I IIIt- - -4
||
II 111
I
l
I
I
H
I
-----
il
|
!IIIII
I I1II 1I III
II
0
10
iII II
I
I
1
1 1 I11I11
I ll
I
II'I
iI i
II
F
.
Ill11
IT
11iI
'
|1|||"|
w/o cont.
--I II
,
-3
-2
10-
102
L11:
I111
-1
10
0
100
Reduced Freq
Reduced Freq
Figure 4.7: Controller effectiveness for changes in throat Mach number due to vertical velocity
perturbations (dv) and temperature perturbations (dT).
Another way of looking at the controller effectiveness is to look at the spectrum of
atmospheric disturbance effect at the throat with the controller on and with the controller
off. Figures 4.8 through 4.10 give the spectra of variations in throat Mach number with
the control off and with the control on. Figure 4.10 shows that the controller actually
amplifies the temperature disturbance spectrum beyond the maximum frequency of
interest of 0.1. But still the controller is effective for lower frequency disturbances, where
the maximum energy is concentrated. Thus we see that although we ignored the
temperature and vertical velocity perturbations in the design of the controller, the
controller is still effective over the most important range of frequencies. Table 4.1 gives
the RMS values of the throat Mach number variations due to different types of
disturbances. From this table it is apparent that this control architecture is most effective
for slow acoustic waves. The entropy perturbations are actually amplified a little bit by
the controller. This is expected since the bleed cancels the slow acoustic perturbations
most effectively as given in Figures 3.17 through 3.19 in the last chapter.
80
T~ir
10
- - -L LL -I-
-
10
--
I
I||
10
--
-
-
-r
I
r
iI
1
I
r1rI
l
I
t
1I
7
1
ii
[
1
C:
1 11
[
_
-
E
I
1J!I
I
1I
I
I
I
rnr-
1
J
-1
I
I I I
1
-
I
T--
-T-
I
I
I
I
-
1
.
1
1 1 1 1 1 1
-
I
II
11
I
I
I
1
i1
cont.
I [
CI7
M
Original PSD (forw.-rel.)
With Ramp+Vel hold
Throat Mach No. Vars w/o cont.
1.-.-.-Throat
Mach
No. Vars with
I
t-
I I
J i l I
J l
I til
I
I I
I I
II)
I
1
--
S
I I 1 11 s
I
I
0 I It
I
I
I
I
i
t
L I
" .1I I
I I
I
I
I
I
.0
||
S
C
|-
-F F
I-
10
I I
2
-u l
1C11
I i
T
1 1
-1
I
1
-
1
I
I
I1
11
1 1 11
A-
10
Ig 1i-a D -lC eI-
--
I
riii
|
I
L
[Ti T
1
1 -111111-1
I
i
o|10
T
I
11|1|
1*
-10-e
I
I|
I
f|||
1
I
~~10
1111
i
1O
f
|I
SI II-i
*
I3
I
I
1
I
1 11
-i
I| I 1II IIIl i
I
I
I
1
|
I I 11
IIi I
I
|
I
1111l1|1|
.1
i
1
lo0
iI
l
I
I
igi.L.IlI
al
I
.Throat
II
I
IIliI
I
}1
I I
II
I I
1 111
10oI
I
I
[I
I
I
111
MachNo. Vars with cont.
I
1
1 1
I
A
1
i
-
|
10
Uf 10 '
-
- 1 -
-
-
-
I I-I -
I
-
-
I-
-
-
i i -
1 F - 1 -
,
I
I I I
TI
I
-{ -I
i
i l I I| Is I Reduced
I
l l
I t i t
I I I IIJ l
l
uI
l I
I
I
I
l frequency
i t I I (Hz)
I I I
l[ I
I
i t I I I I
l
I I I I t i l l % I1 I I J i l l I I I I I J l
-2
I
|
I I I
I with
i lt
I[
I J i l I
i l
Figure 48: PSD
ofvthroat
Mach
control
control
for orar l 10
velocity.
10t number variations
104
10I and without
I I I
I
I I I I
I
I
1 1 110
CL
If I
I I
10
t
I
Ji l
I
J
I
I l
|t
I t J l
I l
f i l
!
I I l i l| |
s
|
181
1 0
r-
10
T-
-1rI
1
LA AAi
I
||
O
-
18
t- -t
~
1
-
I
tl
I
I
I
10 -4
Eeue
Figure~~ of thoa
4.9 Mac|
~
-
-1
i
-
I I
I
0
-1
3
[
t
I
T
-I'
-.- I
10, I01
rquny(z
oto
1aitoswt n
nube
I i iil
i 1
I8*
-1} 1
1
-1I 1
~
-
*
-
1
-
1
T -
A -i-L
-
r
-I
-
-
LL I
10 0
itotcnrlfrueoiy
I
- r
I
t
I
t
-
1 T 11
I
11
-,I
I I I I ilt I I I I Jil I I I I I I I I - Original PS D (Temp.)
I li
t
I
I
J il
l1
I
With Ramp+Vel hold
lilt-I I
I
100
-
L-|-|-1
I Jill
4L*
I
- -
C
'
|
-
-- -
I I
1Lill
I
I
111
I
I
1f
|
1
102
If
11111
I
11 I
I
-
I
111
s
I
I
- -
I
I I Ii
I
I
-Iil
111111I
1
I
I
I
1111
1T I
i i i Ii
I
I-
I
I
I1
I
I
I
J
Throat Mach No. Vars w/o cont.
~Throat Mach No. Vars with cont.
.
I I
%||
r
- ---
I
111
1
I
|11
i ii
I
11i
I
11111|
|
1 -
I
|
I
I
-
111111
0
CO
E
.4
- 10-
I
I
|
|
|
i
i
1
i
i
i
11T
I
I i
i i i i
i
,
C
1
I
1.f
0)
it
6
10-
1
1
I
I
~
I
ilia.
J l l
~
I
I
I
J i l I
I
I
I
I I 1
I
I I
J lll
I
I
I
1i
I
I
i tI
I I
i l
I I I Il l
I
I I
l l
l
I
1 %
t I I I I I J l
I
i
111111
I I1
II
t I I II I J1ll I i l I I I II I II I 1 11111
I.*. I1| i 11
i l 1 J i l lI I |i tI
I i Il t I I I 1 1 l l
1| .4
1. .
I
I
ll.....
i
Ii
I
1I -PT.
-I V I
I
-
|
I
I - -
I
-r-t-t--1-1-r--
-
-r-
108
1010
-04
1-2
1 63 e f
10
Reduced frequency (Hz)
100
1011
Figure 4.10: PSD of throat Mach number variations with control and without control for temperature.
Disturbance Type
RMS value of Mth
without control (x10 3)
Forwd. Vel.
11.0
Up Vel.
13.8
Temperature
10.8
J+
JEntropy
RMS value of Mth with
control (x10-3)
1.7
2.7
2.6
16.2
5.2
48.3
6.4
8.7
9.7
Table 4.1: RMS value of throat Mach number variations with control and without control.
82
F
T
4.1.2 Throat Mach Number Controller Design based on Characteristic
Disturbances
We have observed that the design based on the atmospheric disturbances is not
completely effective in controlling the temperature disturbance; in characteristic form we
see that it actually amplifies the entropy disturbance. We can improve our controller by
designing it specifically for each type of characteristic disturbance. For that we will need
an estimator that gives us an estimate of the perturbation in each characteristic
disturbance.
From the transfer function of the upstream bleed to the characteristic variables at the
throat, shown in Figures 3.17 to 3.19, it is clear that the bleed affects the slow acoustic
waves mostly and fast waves and entropy perturbations are not affected much by the
bleed. Thus in this section a simple controller will be designed to cancel the slow acoustic
wave perturbations at the throat. Since throat Mach number perturbations can be broken
down into the characteristic perturbations, controlling the characteristic perturbations
should ensure the stability of the throat Mach number. Using this approach the controller
architecture looks as shown in Figure 4.11.
Normal Shock
du,dv,dT
dJ+,dJ-,dEnt
dPe
dbl
db2
Pressure sensors
Slow acoustic
wave
estimation
dJs
jK
Feed-forward
Controller
Figure 4.11: Feed-forward control law architecture, for cancellation of slow acoustic waves at the throat,
using the characteristic disturbance estimation.
Using the same procedure as outlined in section 4.1.1, we can show that the controller
gain required for a perfect cancellation of the slow acoustic wave disturbances at the
throat is:
K =-(4.8)
G
Gjo r _"
db (j
_)G
(jw)
Where:
83
The frequency response of the inlet form the J- perturbations at the inlet face
GJth,(jw)=
to the J- perturbations at the throat (Figure 3.8).
db](jw) = The frequency response of the inlet from the upstream bleed perturbations
to the J- perturbations at the throat (Figure 3.18).
GJt
Gj; 2(jw) = The frequency response of the inlet form the J- perturbations at the inlet face
to the J- perturbations at the output of the sensor estimator (Figure 3.8).
Each of the transfer function plots, in chapter 3, shown in figures as mentioned above,
can be approximated by a constant delay function in the range of the frequencies of
interest. Thus the controller also becomes simply a constant delay function with the
constant gain and phase computed from Equation 4.8.
Thus the controller in this form is a very simple one, but now the complexity of the
controller is shifted to the estimation problem. We need to estimate the slow acoustic
waves propagating down the inlet. A detection scheme, for the slow acoustic waves, is
shown in Figure 4.12.
ps1
ps
ps2
3
4
ps
G2
Gi1
D1
dJ-
ds, dJ-
ds, J-
4
G3
+
D2
D3
Figure 4.12: Detection of slow acoustic waves using four static pressure sensors.
Here psi to ps4 are static pressure sensors located along the inlet. They act in pairs such
that psl and ps2 form one pair while ps3 and ps4 form the other pair. Gain G1 and delay
Dl are selected such that the perturbations due to fast acoustic waves are cancelled at the
output of the difference. Thus we get perturbations due to slow waves and entropy at the
output. Similarly gain G2 and delay D2 are selected such that we get only perturbations
due to entropy and slow waves at the output of the difference. Now treating each pair as a
single pressure sensor that gives us only two perturbations, namely entropy and slow
waves, we can select gain G3 and delay D3 such that the perturbations due to the entropy
are cancelled at the output and we get only slow acoustic wave perturbations. The gains
84
and delays can be selected from the transfer function plots for each type of disturbance
based on the location of pressure sensors along the inlet. Due to time constraints, this
controller configuration was not implemented and tested to get the results for comparison.
The implementation of this controller is recommended for future work.
4.2 Shock Motion Control
From the large signal frequency response of the shock motion due to various types of
perturbations in the previous chapter, it can be seen that the shock motion magnitude is
an inverse function of the amount of bleed located at the shock. Thus a simple form of
control for preventing unstarts due to shock motion would be to use a linear proportional
feedback controller based on the shock location [15]. Shock location can be estimated by
using an array of static pressure sensors located close to each other as described in [22].
In this scheme location of the shock would be given by the discontinuity in the pressure
across the pressure sensor array. Such a control scheme is shown in Figure 4.13.
P~-Shock Location
Estimation
Array of pressure sensors
N\NVVVVVVV\NV\n
Normal Shock
Bleed Vale
Figure 4.13: Shock position control using shock location feedback.
The gain K is selected such that the shock bleed valve is saturated for a given maximum
allowable shock displacement. Under the nominal operating conditions the bleed valve
typically bleeds around 1 to 2% of inlet mass flow. This steady bleed is required to
prevent the growth of the boundary layer. It also serves to add a "dead band" around the
nominal position of the shock as shown in Figure 3.21. As the shock tends to move
upstream or downstream due to atmospheric or exit pressure perturbations the
85
proportional controller simply bleeds more air thus tending to prevent the shock from
moving. This configuration was implemented along with the throat Mach number control
and some test results are presented in the next chapter.
86
Chapter 5
Summary, Results and Conclusions
At supersonic speeds mixed compression inlets give high efficiency. High efficiency of
the inlet is measured in terms of high total pressure recovery and low inlet drag. One can
design a near isentropic supersonic inlet that requires bleed to prevent the growth of
boundary layers. However, such a design has reduced stability, due to reduced unstart
tolerance, and is prone to unstart in the face of atmospheric disturbances. Steady-state
bleed for improving unstart robustness and boundary-layer control tends to increase the
inlet drag, therefore, we need to use as low steady-state bleed as possible. We also need
to use active control to increase the unstart tolerance of the inlet to acceptable levels
during normal operation of the inlet.
In this thesis different issues that must be addressed for successful design of a controller
for the active control of the inlet are investigated. First the atmospheric disturbances are
characterized in terms of power spectral density and worst case atmospheric disturbance
PSDs are transformed into the characteristic form for use in the control law design and
analysis. CFD models, both quasi-ID and 2D, are used to obtain frequency response data,
on the basis of which different feedforward controllers are designed to reject the
incoming atmospheric disturbances. Shock position control is briefly discussed in terms
of shock position feedback.
5.1 Some Time Domain Results
To see the effect of gusts in time domain on the throat Mach number and shock position
in the presence of the controller, discussed in sections 4.1 and 4.2, a Gaussian bump
(described in appendix B) is used as the worst-case atmospheric disturbance at the input
of the inlet. Based on results of the quasi-iD simulation, different time histories of the
input and controlled parameters are shown in Figure 5.1. One can clearly see the effect of
the actuator saturation on the throat Mach number. It can also be seen that the upstream
bleed is very effective in stabilizing the throat Mach number (if the actuator is not
saturated), and that it does not affect the position of the shock significantly. Similarly
Figure 5.2 shows the time histories, using the quasi-ID simulation, for a typical
realization of worst-case atmospheric gust in the forward velocity and Figure 5.3 shows
the response to the same input disturbance, using the 2D simulation. Figure 5.2 shows the
effect of turning off the controller for the same disturbance.
From Figure 5.1, it is clear that 1%upstream bleed is barely enough to control the throat
Mach number in the face of typical atmospheric disturbances. Therefore, to control the
throat Mach number effectively for worst-case disturbances one must use a maximum
87
Throat Mach No. vs time
Forward Vel. pert. du vs time
0
1.3
-0.005-
1.25
1.2
-0.01 -
_-- _- _
-
-0.015-
1.15
-0.02-
1.1
--
--
-
-
----------------------
I-
db-l%limit
db1=3% limit
1.05
-0.025-
I
-
1
-0.03 0
0
150
100
50
time (non-dim)
150
50
100
time (non-dim)
Shock Location vs time
Upstream bleed vs time
1
--- - - - -- --
0
LL
CA
CA
(U
-- -- --- _
-
-1
0
-2
.C
-3
-- -
- db1=1% limit
-- db1=3% limit
---
db1=1% limit
db1=3% limit
-
-
-
150
100
50
0
150
100
50
0
- ------
3.4
time (non-dim)
time (non-dim)
Figure 5.1: Time response, using quai-1 D simulation, of the inlet to a Gaussian bump perturbation in the
forward velocity.
Throat Mach No. vs time
Forward Vel. pert. du vs time
1.3
0
cont on
-
-0.005
1.25
-----------------------
-
- -----
-0.02 -- - --
---
-
-0.015
-0.025
--
-
-
--
-
1.15 --
----
1
100
50
time (non-dim)
0
- --
-
150
contoff
-
- -
-
-
------
---
1.05--------
-- ----
-0.03
-
- - -
1.2--
1-1
----
----
--
-
--
-
-
----
----------
------
-0.01
_
-
--
----- - -- - --- - --
--
-----
-----
-
50
0
100
1l50
time (non-dim)
Shock Location vs time
Upstream & Shock bleed vs time
4'
- -- - -- -- -
0
-
- -
- -
cont on
-ocont off
dtdt
4
-2- --
-----
---
-
-I
-I--
-
3.8
0
-
-
-
-
-
-
-I
I
-
"'3.6
-6 --------
---
----------
--
---+
--
-
-
3.4
0
100
50
time (non-dim)
0
150
100
50
time (non-dim)
150
Figure 5.2 Time response, using 1D simulation, of the inlet to a typical atmospheric gust in forward
velocity, with and without control.
88
Forward Vel. pert. du vs time
-,
-
0
-0.005 L
-
I
-0.01
L-
--
I
1.25
- --
- -
-0. 015 --0.02
-
I
4
--
-
---
-
-
-0.03
--
0
-
20
-
I i~~el
1.1
~
'
-
40
60
80
time (non-dim)
-
-
1.15 -
--
-
1.
- -
\,
-0.025
Throat Mach No. vs time
1.3
--
1.05-
-
-1
100
120
-
-
rI
--
20
Upstream & Shock bleed vs time
-
--
I
---- -
I
4-
-
40
60
80
time (non-dim)
--
100
120
100
120
Shock Location vs time
4.2
dbl
db2
----u,4-2
3.8 -- --
FI
-6
20
-
I
-
-
L
- -
4
I.
U_~~-
-8
0
-
- -T---
I
-
-
-
- r- -
0
0
U)
-
-
40
60
80
time (non-dim)
--
-
100
--
120
0
20
40
60
80
time (non-dim)
Figure 5.3 Time response, using 2D simulation, of the inlet to a typical atmospheric gust in forward
velocity. Note that area-averaged values of the variables are shown.
value of the upstream bleed, dbl, of 2 to 3% of the inlet mass flow. Figure 5.2 also shows
the maximum shock bleed required in order to keep the shock from moving in the face of
a typical realization of worst-case atmospheric perturbations in forward velocity.
For controlling this typical realization of the worst-case gust, the maximum transient
shock-bleed required is around 5 to 6% of the inlet mass flow. Although these bleeds are
large, they represent a transient and would go to the maximum only during the peak gust
encountered during flight; this would happen over a very small time interval and overall
efficiency of the system would not degrade significantly even for large bleed values. A
comparison between the results of quasi-iD and 2D simulations shows that the controller
controls the throat Mach number in quasi-iD simulation almost perfectly while in the 2D
simulation there is a little drop in the throat Mach number. That is not surprising as the
controller was specifically designed using the quasi-iD simulation results. Nevertheless,
given this fact, the performance of the controller in 2D simulation is quite acceptable.
These time-domain results also validate our initial conclusion, using the frequency
response analysis, that over the range of frequencies of interest the quasi-i D Euler model
is similar to the 2D Euler model of the inlet.
89
5.2 Conclusions
From the analysis and results presented in this thesis it is clear that a high recovery inlet
can be designed that has low steady bleed requirements; if one relaxes the requirements
for unstart tolerance to atmospheric disturbances. The unstart tolerance can then be
enhanced using active control. During normal operation, when the inlet encounters the
atmospheric gusts, the bleed valves bleed air as required and the robustness of the inlet
increases. The net bleed required for this setup is much less as compared to a system that
has to add robustness to unstart in the form of a static margin; which results in higher
bleed requirements and lower recovery even when there are no atmospheric disturbances
present. The low bleed requirements and enhanced recovery can have a significant impact
on the propulsion system efficiency for long-range supersonic transport aircraft. It was
shown that the quasi-iD model of the inlet is sufficient to design and implement the
control law as the area-averaged 2D results are similar to the quasi-iD results if a
symmetrical upstream bleed is used. A simple feedforward controller can significantly
reduce the throat Mach number perturbations due to the atmospheric disturbances. Using
a separate estimator for fast and slow waves, and designing the controller to cancel these
waves specifically, can improve the performance of the presented throat Mach number
controller. A (possibly reduced scale) experimental setup is necessary to verify the ideas
presented in this thesis.
90
Appendix A:
Code Listing for Constant Delay Approximation of the
Transfer Functions
In this appendix a sample code for the constant delay approximation fitting for the
forward velocity to throat Mach number perturbations is listed. First of all the
constPhaseFito function is called that extracts the dominant mode in the transfer function.
Then the function expFito is used in the same manner as constPhaseFit() to find the
remaining modes using a global search method. The amplitude of each mode is found by
using a least square fit.
% main m file
used for constant delay fitting:
% fit a tf from the Inlet U to throat Mach No.
(MtDU):
clear all;
clc
global f mag phase;
load .. \ident\dutfs;
% used by expFit:
mag = abs(dutfs.MtDU);
phase = angle(dutfs.MtDU);
f = dutfs.f;
inv = 1;
Ti = constPhaseFit(2,10,0.001,inv,1);
the TF for MtDU)
% -l
pause;
% do a global search one by one:
n = 1;
dT2 = 1.0;
for num=2:2
for y=0.002:0.01:1.5
err(n)
= expFit([dT2
delT(n) = y;
n = n+1;
y]*T1,
0,inv);
end
index = find(err == min(err));
dT2(num) = delT(index)
figure (2);
clf;
[minerr(num-1),A]
pause;
n
=
= expFit(dT2*T1,
1;
end
i = sqrt(-1);
fmtdu = linspace(0, max(f),
250);
91
1,inv);
for inversion
(+ve sign of
tf = zeros(1,length(fmtdu));
delT = dT2*T1
for n=l:length(delT)
inv*A(n)*exp(-i*2*pi*fmtdu*delT(n));
cph
tf = tf + cph;
end
figure (2);
clf;
subplot(211);
lhl
= semilogx(f, mag);
set(lhl, 'LineWidth',2);
hold on;
lh2= semilogx(fmtdu, abs(tf), 'r-.');
set(lh2, 'LineWidth',2);
title('Transfer function from forward vel. to Mth');
xlabel('Reduced Frequency');
ylabel ('Magnitude');
grid;
axis([10^-3 1 0 51);
legend([lhl lh2],'Numerical TF','Const. Delay App. TF');
subplot(212);
lhl= semilogx(f, phase*180.0/pi);
set(lhl, 'LineWidth',2);
hold on;
lh2=semilogx(fmtdu, angle(tf)*180.0/pi,'r-.');
set(lh2, 'LineWidth',2);
xlabel('Reduced Frequency');
ylabel ('Phase');
grid;
axis ([10^-3
1 -200 200]);
% save the model:
MtDUMod = tf;
save MtDuMod.mat MtDUMod fmtdu
function dT = constPhaseFit(lowlimit, highlimit, delta, inv, disp)
% fitting a constant phase to the inlet
freq. resp. data:
global f mag phase;
Ph = phase*180/pi;
%figure (1);
%subplot(211);
Ph);grid;
%plot(f,
% estimate the constant phase fit from the input phase:
n = 1;
v = [lowlimit:delta:highlimit];
% weightings
wt = exp(-2.5*f);
92
for delT=v
i = sqrt(-1);
constPh = angle(inv*exp(-i*2*pi*f*delT))*180.0/pi;
%hold on;
%subplot(211);
%plot(f,constPh,'r');
% subtract the constant phase:
Phdiff = wt.*(Ph - constPh);
%subplot(212);
%plot(f,Phdiff);grid;
err(n)
= norm(Phdiff);
n = n + 1;
end
delT = v;
%plot(delT,err);grid;
minerr = min(err);
ind = find(err == minerr);
dT = delT(ind);
if disp == 1
figure(1);
clf;
subplot(211);
% plot the error function:
plot(delT, err);
grid on;
title('error function vs delays');
xlabel('delay');
% plot the given phase:
subplot(212);
plot(f,Ph);
hold on;
constPh = angle (inv*exp(-i*2*pi*f*dT))*180.0/pi;
plot(f,constPh, 'r-.');
grid on;
title('given phase (solid) and fitted constant phase
xlabel('frequency');
dT
end
return;
function
[err,A] = expFit (delT,debug,invt);
global f mag phase;
i = sqrt(-1);
len = length(delT);
v
= zeros(length(f)*2,
len);
% weighting function:
93
(dotted)');
W =
[exp(-f) exp(-f)];
for n=l:len
% inv
cPh = invt*exp(-i*2*pi*f*delT(n));
imag(cPh)]'.*W';
v(:,n) = [real(cPh)
end
M
for -ve tfs
v;
H
=
H
A
=
=
[mag.*cos(phase) mag.*sin(phase)].*W;
H(:);
M\H;
% [real part
% least squares fit for the gains
Hhat = M*A;
% combine the real and img parts
len = length(f);
Hfit = complex(Hhat(1:len), Hhat(len+1:2*len));
if debug
subplot(211);
plot(f,mag);
hold on;
plot(f,abs(Hfit)./W(1:len)','r-.');
grid;
title('given mag
(solid) and fitted mag
(dotted)');
subplot(212);
cPhase = angle(invt*exp(-i*2*pi*f*delT(1)));
phl = medfiltl(phase-cPhase,8);
plot(f,phl*180.0/pi);
hold on;
ph2 = medfiltl(angle(Hfit)'-cPhase,10);
plot(f,ph2*180.0/pi,'r-.');
grid;
title('given phase
A
(solid) and fitted phase
end
Hgiven = complex(H(1:len),
H(len+1:2*len));
if debug
err = norm(abs(Hfit-Hgiven))
else
err = norm(abs(Hfit-Hgiven));
end
94
(dotted)');
imag part]
Appendix B:
Gaussian Bump used as an Atmospheric
Disturbance
Atmospheric disturbances having a Gaussian distribution in space can be used to model
the typical gusts. Though these "Gaussian bumps" do not have the same spectral
characteristics as those of typical atmospheric gusts but still they are useful as their
spectral content can be adopted to lie within the atmospheric gust spectra by multiplying
the Gaussian bumps with a sinusoidal waveform. Also these bumps do not have sharp
edges as in a step thus representing the actual variations in the atmospheric variables to a
good approximation.
A "Gaussian bump" is defined as:
h(t) = AO exp[- g(t - tp
cos(2ufmt)
(B. 1)
Where:
Ao = Peak Amplitude of the disturbance.
tp = Bump peak amplitude time (50 in figure 5.1).
g = Variable that sets the width of the bump (0.002 for figure 5.1). Smaller values
of g make the bump wider and therefore reducing the higher frequency
content.
fm = Center frequency where we want to shift the spectral peak of the bump
(0.001 for figure 5.1).
The spectrum of the "Gaussian bump" modulated by the cosine is given by:
H(f) =
A0
exp(j2rt,(f - f,.))exp -
2)gr
(ffM)2J
g
95
(B.2)
96
References:
[1] David W. Mayer, Gerald C. Paynter, "Prediction of Supersonic Inlet Unstart Caused
by Free stream Disturbances." AIAA Journal Vol. 33 No. 2 Feb 1995
[2] Jim Paduano, Ali Merchant, Mark Drela, Guillaume Lassaux, Brian Schuler, "Design
and Tesing of a High-Recovery, Actively Controlled Supersonic Inlet." MIT GTL report.
[3] David Soreide, Rodney Bogue, Jonathan Seidel, L.J. Ehemberger "The use of a
LIDAR Forward-Looking Turbulence Sensor for Mixed-Compression Inlet Unstart
Avoidance and Gross Weight Reduction on a High Speed Civil Transport." AIAA Paper
1997
[4] John D. Anderson, "Modern Compressible flow with historical perspective." McGraw
Hill Books 1982.
[5] W. Tank, J, Gillis, "Atmospheric Disturbance models for linear and nonlinear system
response analysis." AIAA 34 Aerospace Sciences Meeting and Exhibit, Reno, NV Jan
1996
[6] William G. Tank, "Atmospheric Disturbance Environment Definition", NASA report
CR-195315 Feb. 1994
[7] James A. Fay "Introduction to Fluid Mechanics". Book.
[8] C. W. Fairall, A. B. White, "A Stochastic Model of Gravity-Wave Induced Clear Air
Turbulence." Journal of Atmospheric Sciences, 49, pages 1771-1790, 1991.
[9] J. Roskam, "Airplane Flight Dynamics and Automatic Flight Controls." Part 1.
[10] Brown & Hwang, "Stochastic Estimation and Control"
[11] Peter Giannola, Martin Haas, "Modeling the Dynamics of Supersonic Inlet/GasTurbine Engine Systems for Large-Amplitude High-Frequency Disturbances", 36th
AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit July 17-19, 2000 /
Huntsvilie, AL
[12] Hurrell, H. G., "Analysis of Shock Motion in Ducts During Disturbances in
Downstream Pressure." TN 4090, NACA, 1957.
[13] Culick, F. E. C. and Rogers, T., "The Response of Normal Shocks in Diffusers."
AIAA Journal, Vol. 21, No. 10, pp. 1382-1390, 1983.
97
[14] Yang, V. and Culick, F. E. C., "Analysis of Unsteady Inviscid Diffuser Flow with a
Shock Wave." AIAA Journal of Propulsion and Power, Vol. 1, No. 3, pp. 222-228, 1985.
[15] MacMartin, Douglas G., "Dynamics and Control of Shock Motion in a NearIsentropic Inlet." AIAA 2002-2943.
[16] Numbers, Keith and Hamed, Awatef, "Development of a Coupled Inlet-Engine
Dynamic Analysis Method." AIAA/ASME/SAE/ASEE Joint Propulsion Conference &
Exhibit, 33rd, Seattle, WA, July 6-9, 1997.
[17] Freund, Donald and Sajben, Miklos, "Experimental Investigation of outflow
boundary conditions used in unsteady inlet flow computation." AIAA Aerospace
Sciences Meeting & Exhibit, 3 5 th, Rno, NV, Jan. 6-9, 1997.
[18] Sajben, Miklos and Said, Hazem, "Acoustic-Wave/Balde-Row Interactions Establish
Boundary Conditions for Unsteady Inlet Flows." Journal of Propulsion and Power, Vol.
17, No. 5, September-October 2001.
[19] E.L. Goldsmith, J. Seddon, "Practical Intake Aerodynamic Design." Blackwell
Scientific Publications 1993.
[20] Umair Ahsun, Ali Merchant, James D. Paduano, Mark Drela, "Design of an Actively
Stabilized, Near Isentropic Supersonic Inlet." AIAA Summer Conference, June 2 3 -2 6 th
2003, Orlando Florida.
[21] Martin Haas, United Technologies Research Center, East Hartford, CT. Personal
communications.
[22] Miklos Sajben, John F. Donovan and Martin Morris, "Experimental Investigation of
Terminal Shock Sensors for Mixed-Compression Inlets." Journal of Propulsion and
Power, Volume 8 No. 1, 1992.
98
P~I;)-) -__