HIGH RESOLUTION RAINFALL-RUNOFF SIMULATION IN URBAN AREA: ASSESSMENT OF TELEMAC-
advertisement

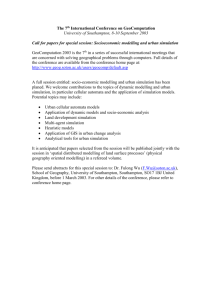
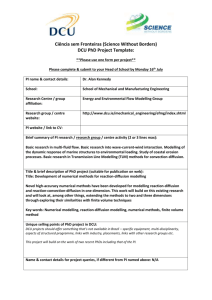
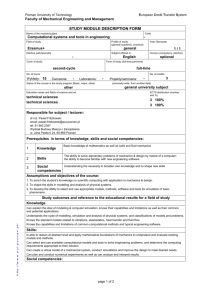
E-proceedings of the 36th IAHR World Congress 28 June – 3 July, 2015, The Hague, the Netherlands HIGH RESOLUTION RAINFALL-RUNOFF SIMULATION IN URBAN AREA: ASSESSMENT OF TELEMAC2D AND FULLSWOF-2D Qiang Ma(1), Morgan Abily(1), Ngoc duong Vo(1) (2), Philippe Gourbesville(1) (1) University of Nice Sophia Antipolis/URE Innovative-CiTy, Polytech Nice Sophia, NICE, France. e-mail: maqia2@aquacloud.net (2) Faculty of Water Resource Engineering, University of Science and Technology, The University of Da Nang, Viet Nam. ABSTRACT Under extreme rainfall events, the complexity of urban environment makes difficult to estimate the flooding processes. To overcome this issue, practitioners are widely using high resolution data with numerical codes solving the 2D-Shallow Water Equations (SWEs). However, due to inherent limitations in the numerical simulations, the outcome of different mesh structures and numerical schemes may generate differences between the model results. This paper focuses on the possibilities, performance and limits of using standard numerical modelling approaches for high resolution rainfall-runoff process in the urban area. An extreme rainfall scenario in the city centre of NICE, France, is simulated with two different numerical codes (Telemac-2D and FullSWOF-2D) using LiDAR dataset. These 2D SWEs based codes rely on different meshing strategies (non-structured and structured) and different numerical schemes (Finite Element and Finite Volume). For high resolution modelling, the differences between the water depths simulated by these two models were compared and discussed to find the major causes and to evaluate the impact of modelling strategies on model quality. The emphasis is to optimize the balance including the strategy for LiDAR data inclusion, the computation time, the stability and the accuracy of the high resolution rainfall-runoff models in the urban flood simulation. Keywords: urban area, high resolution rainfall-runoff modelling, Telemac-2D, FullSWOF-2D, LiDAR data 1. INTRODUCTION Urbanisation associated with the economic and population growth has become a significant global trend in the past half century (United Nations, 2010). Nowadays, flood hazards in urban area increased rapidly as a consequence of the climate change, sea level rise, environment change, human activities or even infrastructure decaying (Gourbesville, 2014; Powell, 2010; Mitchell, 2003). Urban flood can either come directly from extreme storm, from overbank flows of river network, from coastal surges or from their combination (Meesuk et al., 2014). Beside of the various urban flood causes, some special characteristics (complicated geometry, short reaction time, etc.) also bring difficulties to the use of numerical modelling tools for urban flood management. Among extreme events, intense rainfall storm may lead to catastrophic consequences especially in the highly urbanised and industrialised areas. It has been enhanced in previous studies that standard numerical modelling tools used for free surface numerical modelling relying on 2D Shallow Water Equations (SWEs) can provide a good support for flood risk assessment. In Mignot et al., (2006) it is enhanced that the 2D SWEs based on numerical modelling tools can be widely used to support the mitigation measures in a dense urban area. These tools can cover a wide range of applications including unsteady flows with wetting and drying fronts, etc. Abily et al., (2013a) and Delestre (2010) gave another illustration of possibilities of 2D SWEs codes use for intense rainfall risk modelling. At the same time, requirements limitations and cautions related to such practice have been raised up. Requirements are related to the need of good representation of urban topography. Inherent limitations are related to process of inclusion of this topographical information in the numerical simulation (Abily et al., 2014a). The fact that use of 2D SWEs based codes over rapidly changing topography goes beyond underlying assumptions and therefore requires a rigorous control of simulation quality. Indeed, high resolution (HR) urban flood modelling is particularly challenging because of the geometrically complex environment and the metric to metric scale feature that highly impact the flow path and resistances distribution in the overland flow simulation (Schubert et al., 2012). Different types of aspects have therefore to be taken into consideration of this HR modelling of intense rainfall event over highly urbanised area: 1.Numerical method performance For the numerical performance aspects nowadays by using three difference methods (Finite Difference (FD) method, Finite Volume (FV) method and Finite Element (FE) method), the 2D SWEs can be numerically solved in the hydraulic models. Nevertheless due to above mentioned the high topographical gradient constraint, to a low water level in rainfall induced runoff (along with important velocity) and to important flooding and drying processes, numerical issues might occur if code is not well-balanced and positivity preserving see Delestre et al., (2013) and Abily et al., (2013a; 2013b). 2.Level of accuracy of topographic data to include in models To well descript the complicated geometry of urban area, the fine resolution data, LiDAR (Light Detection and Ranging) and photogrammetry datasets become popular and available for the urban flood modelling community. The data from E-proceedings of the 36th IAHR World Congress, 28 June – 3 July, 2015, The Hague, the Netherlands new remote sensing technology can produce the high accuracy DSM (Digital Surface Model) of the study area. It has been proven extremely valuable as the main topography input of the 2D hydraulic models (Neal et al., 2010; Hunter et al., 2008) to estimate flood intensities at building scale (Schubert et al., 2012). 3.Process of HR topographic data inclusion in codes (meshing process) As we know, the model will be highly affected by the meshing strategy resolution. When the cell size of the mesh is in accordance with the unitary cell size of the finest available DEM, the maximal quantity and quality of topographic surface information will be included in the spatial discretisation. However, the balance between the topographic description accuracy and computation time is always a big issue for the hydraulic modelling simulation. The computation time will be exponentially increased with the decreasing of the mesh cell size. Hence, finding the balance between simulation accuracy and computation time to catch a suitable modelling strategy in the urban area is challenging in the urban flood modelling. Our interest here is to compare feasibility and performance of two codes (Telamac-2D and FullSWOF-2D) to investigate on feasibility of HR rainfall-runoff simulation in urban area. These two codes rely on different strategies for spatial discretisation. None of these two codes has been tested for runoff modelling over urban area yet. With acceptable numerical methods, the model will calculate the flow movement based on the different shapes of the grids, two main kinds of meshes can be applied for the hydraulic calculation. One is non-structured used in Telemac-2D, which is a type of polygon mesh consisted by a set of triangles connected by their common edges or corners. FullSWOF-2D uses the regular gird which is a tessellation of n-dimensional Euclidean space by congruent parallel topes. Various modelling strategies with different mesh shapes and numerical methods may lead to the significant distinction first in topographic information inclusion and in computation time, modelling stability. 2. MATERIALS AND METHOD 2.1. Codes In this study, two standard hydraulic models (Telemac-2D and FullSWOF-2D) with different modelling strategies were selected for the urban extreme rainfall simulation. 2.1.1. FullSWOF-2D FullSWOF stands for Full Shallow Water equations for Overland Flow (Delestre et al., 2013). It is a set of open source C++ (ANSI) codes distributed under a GPL like free software license. This software resolves the shallow water equations thanks to a well-balanced finite volume method based on the hydrostatic reconstruction (introduced in Audusse et al., (2004)). This numerical method has good properties: water mass conservation, well–balanced (at least preservation of lake at rest equilibrium) and positivity water height preservation. In FullSWOF-2D, the 2D SWFs are solved on a regular grid. The shallow water system in 2D writes: [1] Where, the unknowns are the velocities , [m/s] and the water height (respectively y) stands for the x-direction (respectively y-direction). and . The subscript x are the ground slope and Sfx and Sfy are the friction terms. The hydrostatic reconstruction is based on a general principle of as described below for a first order finite volume scheme for the form of SW1D (without source terms): choosing a positive and consistent numerical flux F(UL,UR) (e.g. Rusanov, HLL, kinetic…), a finite volume scheme writes under the general form: [2] is the time step and is the space step. The idea is to modify this scheme by applying the flux to reconstructed variables. To treat properly the topography source term , this reconstrcution is applied on , and . This gives us the reconstructed variables and , on which the hydrostatic reconstruction is applied. Detail of this method is not the purpose of this communication and can be found in Delestre, (2010). Briefly, the aim of the hydrostatic reconstruction is to be well-balanced. It is designed to preserve at least steady states at rest ( ). When it is directly applied on the initial scheme, it leads to an order one scheme, while coupling it with high order (using MuSCL, ENO, etc.) reconstruction increasese the order and the acuracy. Where FullSWOF-2D has already been tested on analytical solution library (SWASHES) and has been used to simulate runoff over agricultural field (Delestre, 2013, 2010) and dam-break (Cordier et al., 2013). FullSWOF-2D’s above mentioned properties are of good interest for urban overland flow and in Abily et al., (2014). FullSWOF-2D has been used with HR 3D classified topographic data to model river overland flow over an urban area. Nevertheless runoff modelling over urban area with FullSWOF has not been tested yet. The MPI and SKELGIS parallel versions of the FullSWOF-2D code are presented in Cordier et al., (2013). 2 2.1.2. Telemac-2D Telemac-2D (product of EDF & TELEMAC-MASCARET consortium) is based on resolution of the 2D SWEs system with the possibility to choose either FE or FV method over the non-structured grids. This code is widely used to simulate freesurface flows in two dimensions of horizontal space for various hydrodynamic modelling applications (dam-break, river flood etc.). Telemac-2D FE method relies on a Stream Upwind Petroy Galerkin (SUPG) numerical scheme, decentring the basic functions in order to account for the flow direction in the discretization of the advection terms. Telemac-2D FV method has well-balanced scheme properties including a rewriting of the SWEs using a hydrostatic reconstruction leading to an oscillation free and permanently positivity solution (Audusse et al., 2014). The FE method has been used in this study as the introduction of rainfall as a source term has not been implemented yet in the FV version of the code. So far, no cases of urban runoff modelling using this aspect code property have been tested. Telemac-2D offers the user a set of FORTRAN sub-routines that can be modified to meet the specific requirements of each case (e.g., specification of initial conditions or complex boundary conditions, link-ups with other modelling systems, introduction of new functions, etc.). Moreover, the model supports to run on the parallel mode with several CPUs to reduce the simulation time 2.2.Case study scenario 2 Nice (France) has a 721km urban area (figure 1) being subject to typical Mediterranean climate. The intense rainfall event occurs frequently and can lead to important flooding events. Figure 1: Case study area: city centre of Nice, France Our study area, the city centre of Nice (figure 1) located closed to the coastal line and also surrounded by three small hills is suffered flash flood frequently (November, 2014). The heavy rainfall lands on the hills and flows down into the urban area could course big flood damage. Test case scenario of extreme rainfall event has 100mm/hour rainfall intensity in 1 hour duration. The rainfall is spatially uniform over the computational domain. For our study, considering possibilities of sewer system access clogging and sewer network design which is saturated during intense rainfall events, it has been decided to put ourselves in this “worst case” situation as in ASN (2013). Only the local rainfall is considered in this test, therefore, three closed boundaries around our study area were designed in both two models and one open boundary with the sea level equal to 0m was selected at the coastal line. 2.3.Topographic dataset The LiDAR data used in this study was produced by NICE Municipality in 2005 with specific flight at average altitude 2 2 around 1300m. Produced airborne LiDAR mapping covers 350km with 1 per 1.25m average densities of laser points. Thirty georeferenced land-markers were used for the geo-referencing of the dataset. The above ground features like buildings, bridges are caught by the measurements, but some narrow features such as walls are not. The treatment for removing the vegetation and building structures was applied during the data processing for the DTM. The produced LiDAR based DTM with 2m per 2m resolution has an average vertical and horizontal accuracy of 0.15m and 0.3m, respectively. Figure 2 illustrates a part of LiDAR born DTM shown the buildings are removed. E-proceedings of the 36th IAHR World Congress, 28 June – 3 July, 2015, The Hague, the Netherlands Figure 2: Visualization on a part of fine resolution data (© Metropole Nice Cote d’Azur): (a) Aerial picture; (b) LiDAR born DTM; (c) Shapes of buildings; (d) DTM combined with building shapes. Some noise still existed in the dataset. As we mentioned before, the LiDAR measurement caught the above-ground element, but locally, especially where conditions for aerial topographic data gathering are not optimal, the vertical accuracy is below the average accuracy of the data set (up to 1.5m in some sub areas). In the figure 3, the red rectangle shows that for some small structures in the urban place (car parking entrance), the shapes of the structures described in the DTM dataset are changed. It will lead to some impacts on the water movement and flood accumulation in the modelling computation. However, in our case, the main topographic reference for mesh generation was consisted with the LiDAR born DTM and the building shapes digitalized from photogrammetry data. The process for shaping the buildings may also create some inaccuracy in the dataset. For instance, at figure 3, the yellow rectangles indicate some mistakes when digitalizing the shapes of the buildings. Figure 3: Difference between reality and LiDAR born DTM dataset combined with building shapes. 2.4.Model strategies comparison Two hydraulic models, Telemac-2D and FullSWOF-2D were created mainly focus on the areas indicated by the red line (figure 1). The extreme storm event with 100mm/hour rainfall intensity of 1 hour duration was designed for the urban flood modelling. As the study area is the commercial centre of the city, the friction coefficient of the ground surface equalled to 1/3 60 (L /T) by Strickler’s law and set as spatially uniform. The model strategies of two models were shown in table 1. 4 Table 1: Setup the model parameters Main Parameters Test Model Telemac-2D FullSWOF-2D Finite Element Finite Volume (1st & 2nd order) Non-structured mesh 1 m × 1 m regular grid Calculation elements 122,085 534,954 Initial condition 0.002 m 0m Open boundary at costal line Open boundary at costal line Solid boundary Building block (elevation data) Numerical scheme Mesh size Boundary condition Building representation 60 m /s 60 m1/3/s Variable time step Variable time step 3600 s 3600 s Rainfall input Constant rainfall 100mm/hour Constant rainfall 100mm/hour Parallel mode MPI MPI Strickler coefficient Time step Duration 1/3 The meshes of those two models were generated based on same topographical data (2m resolution LiDAR born DTM combined with shapes of buildings). In the FullSWOF-2D model, the 1m square grid was used as the geo-input data for the model. And in the Telemac-2D model, the non-structured mesh was created by resampling the boundary of the buildings and catchment with 1m equal distance to make sure the similar mesh size would be applied in those two models. We can notice the difference of the calculation elements between two models to estimate the more calculation elements may cause longer simulation time. As mentioned in previous section, similar boundary conditions were defined in those two models. With same scenario, we tested those two models on two different computer environments, the Telemac-2D model was run on the laptop with 2 CPUs, and the FullSWOF-2D model was run on the sever with 16 CPUs. The simulation results from two different models were compared and discussed in this study to enhance effects of HR DEM inclusion strategy for rainfall-runoff urban flood simulations with these two codes. 3. RESULTS AND DISCUSSION 3.1 Mesh comparison The direct use of produced HR DSM (LiDAR data born DTM combined with building shapes) as a regular grid in FullSWOF-2D is feasible requiring resampling of the grid to get enough computational points in narrow streets. In Telemac-2D, the non-structured mesh generating tool is not efficient when over constrained (like in really narrow streets). Therefor to get a reasonable structured and non-structured grid for comparison, the narrowest streets were removed by agglomerating building shape file. Figure 4 shows difference between these treatments ignoring some small street or some open ground surrounded by the buildings in the case study area. It might have some impacts on modelling work. Using the full building and streets description are in progress. Nevertheless it is a first interesting outcome for comparison to mention that is will be more straightforward to do it with the regular grid than with the non-structured mesh which requires important effort for mesh generation. Figure 4: Comparison between before and after the narrow streets removal treatment on the topography input. After the treatment, HR DEM was used for generating meshes (non-structured & regular grids). Comparing the different meshes, the most significant difference which can directly impact the model result is the flow path description. It is well known that with the regular grid meshing, the flow direction, when not strictly following a Cartesian direction, flow path length becomes overestimated (figure 5). In the non-structured mesh, the computation direction is less affected. Hence, if the open ground or streets in the study area are in the “horizontal” or “vertical” directions, there is no big difference between those two meshes. But if not, the flow movement in the regular grids shown in “stepwise” (figure 5), will cause the difference of the water depth at several points along these streets. E-proceedings of the 36th IAHR World Congress, 28 June – 3 July, 2015, The Hague, the Netherlands Figure 5: Impacts of mesh styles on the flow path (green line representing the flow path in non-structured mesh, black line representing the flow path in regular grid). 3.2 Model results comparison 3.2.1 Maximum water depth comparison Comparing simulations based on different model strategies, the maximum water depth distributions in the study area are nearly same. Overview of computed maximal water depth with the one hour intense rainfall event in FullSWOF-2D and Telemac-2D are presented in figure 6. The two models results show that for the simulated extreme event, flooded area appears at the old town (lower middle part) which has lower elevation (figure 6). It illustrates that even though based on different mesh structures and numerical methods, the Telemac-2D and FullSWOF-2D codes can catch the similar results for the HR urban flood rainfall-runoff simulation. Except the water accumulation at closed boundary places (which is due to DEM grid errors at this location), the significant difference between those models results is appeared at the upper part of the down town (red place in the comparison map). In this narrow place in the old town, the Telemac-2D model has nearly more than 1m higher computed maximum water depth compared with the FullSWOF-2D. Figure 6: Maximum water depth of FullSWOF-2D and Telemac-2D simulation and the difference between them. For the difference in the narrow place at old town could be as the results of the influences by initial condition d esign of two models. In Telemac-2D model, to make sure that the model can be run with rainfall implemented as a source term, the 0.002m water depth was inputted in the open ground of study area as the initial condition. In the urban area with many buildings and not too much open place, this difference may not affect a lot on the final simulation. Nevertheless the difference between those two models is located at the one “outlet” of the mountain area. Hence it is reasonable to get higher maximum water depth because of different initial conditions. 6 3.2.2 Time series water depth comparison After the assessment of maximum water depth computed by different models, four points time series water depth were abstracted from the results to make more detailed comparisons. Figure 7, compares water depth evolution at given points of interest points 1 and 2 located in the old town area, and points 3 and 4 took at the free open ground to test the model simulations at general places. Figure 7: Time series water depth comparison at 4 selected points in the study area nd st Globally, at points of interest, results are comparable between Telemac-2D and FullSWOF-2D 2 order simulation. At 1 order, with FullSWOF-2D important differences occur. These differences are almost due to the steep slope gradient st which not properly handled by hydrostatic reconstruction method at 1 order as mentioned in Delestre et al., (2012). At comparison point 1, both the time series water depth from two models showed similar shapes, after around 40mins, the nd water depth of Telemac-2D simulation increased faster than the FullSWOF-2D 2 order which caused almost 0.2m difference at the end. At point 2, the difference appeared much earlier, after 20mins, the Telemac-2D simulation showed nd same trend unless with lower increasing speed. And in the FullSWOF-2D with 2 order FV at this point, there is almost no water accumulated during the simulation. Beside water depth abstracted at the main different places detected from previous assessments, in other places of the study area, the simulation of all the models was almost same. Whether the serious flooded area (point 4) or the not flooded places (point 3), both the shape and the computation values of models was basically the same. 3.3 Computation time comparison For the pre-processing for HR DEM inclusion the different mesh generation strategies, involve different time consumption. For instance, to generate the non-structured mesh, by the software BlueKenue from (TELEMAC-MASCARET), it took 12 hours for generating the mesh with equal distance 1m resampled boundary. But the time for regular grid generation was incomparably shorter. However, at equal hardware (CPU) resources, Telemac-2D computational time is much swifter than FullSWOF-2D. This is due to FE method efficiency and to the non-structured mesh reduction of computational points. Hence, if we assume that those two models will run with same hardware (the computer with same number of CUPs), for the business project which normally has more powerful computer resource, the simulation with regular mesh will save a lot of time. 4. CONCLUSIONS AND PERSPECTIVES High resolution LiDAR data has the clear advantage of describing the ground surface in the urban area. Nevertheless, there are still some obstructions and limitations on the way to directly input it in the hydraulic model. Before running the simulation, the assessment and treatment on the dataset is very necessary in the whole modelling process to decrease the impacts of the noisy from the data measurement itself. In our case, resampling the building boundaries by removing narrow structures inside the blocks can help the model computation running more smoothly and stably. However, two different kinds of standard modelling tools (Telemac-2D and FullSWOF-2D) with different model strategies are tested in this study, focussing on feasibility and limits of (i) HR runoff modelling over complex area and (ii) strategies of spatial discretisation of HR topographic data. With the reasonable computation nodes, the non-structured mesh generation consumes longer time but can better describe the buildings shapes and the flow path than the regular grids. Limited by the mesh structure itself, the flow path in the regular grids mesh somewhere shows the stepwise shape which can lead to the influences on the model computation, especially at the place along the building boundaries with angled directions. Beside the impacts of the mesh structures, the influences of using various numerical schemes to solve the 2D E-proceedings of the 36th IAHR World Congress, 28 June – 3 July, 2015, The Hague, the Netherlands SWEs in different models are also analysed in this case by running two standard hydraulic models (Telemac-2D and FulSWOF-2D) with two different strategies ( FE and FV). For the general places at the study area, the simulation results nd are quite same. Furthermore, the water depth computed by using 2 order FV and FE schemes are almost similar. At the complicated and narrow flooded places, the numerical impacts are quite significant due to high gradient occurring in the st topography hardly numerically handled by codes. Considering flood distribution results, by using the 1 order FV scheme nd to solve the 2D SWEs, the computed water depth is usually overestimated than applying other two schemes (2 order FV and FE) at the serious flooded area. One cause of differences is from the difference at the initial condition which is a way for Telemac-2D to deal with small water depth as FE approach is not strictly preserving water depth positivity. Further analysis is in progress to compare efficiency and limitations of numerical aspects regarding this type application (runoff modelling over complex environment) which is close to limit of 2D SWEs codes essence. 5. ACKNOWLEDGEMENT Photogrammetric and photo-interpreted dataset used for this study have been kindly provided by DIGNCA for research purpose. This work was granted access to the HPC and visualization resources of “Centre de Calcul Interactif” hosted by “Universite Nice Sophia Antipolis”. 6. REFERENCES Abily, M. Duluc, C.M., Faes, J.B., and Gourbesville, P., 2013a. Performance assessment of modelling tools for high resolution runoff simulation over an industrial site, Journal of Hydroinformatics, 15(4), 1296-1311. Abily, M., Gourbesville, P., and Andres, L., 2013b. Photogrammetric and LiDAR data for high reolution runoff modeling over industrial and urban sites. Proceedings of 2013 IAHR World Congress. Abily, M., Delestre, O., Amosse, L., Bertrand. N., Laguerre, C., Duluc, C.M., and Bourbesville. P., 2014. Use of 3D rd classified topographic data with FullSWOF for High Resolution simulation of river flood event over a dense urban area. 3 IAHR EuropeCongress, Book of Proceedings, 2014, Porto, Portugal. ASN, 2013. Protection des installations nucléaires de base contre les inondations externes. Guide de l’ASN n°13, p.44. Cordier, S., Coullon. H., Delestre, O., Laguerre, C., Le, M.H., Pierre. D., and Sadaka. G., 2013. FullSWOF Paral: Comparison of two parallelization strategies (MPI and SKELGIS) on a software designed for hydrology applications, In ESAIM: Proceedings (Vol. 43, pp. 59-79), EDP Scoences. Delestre, O. 2010. Simulation du ruissellement d’eau de pluie sur des surfaces agricoles (Doctoral dissertation, Universite d’Orleans) Delestre, O., Cordier, S., Darboux, F., and James, F., 2012. Alimitation of the hydrostatic reconstruction technique for Shallow Water Equations. Comptes Rendus Mathematique, 350 (13), 677-681. Delestre, O., Lucas. C., Ksinant, P.A., Darboux, F., Laguerre, C., Vo, T.N., and Cordier, S., 2013. SWASHES: a compilation of shallow water analytic solutions for hydraulic and environmental studies. International Journal for Numerical Method in Fluids, 72(3), 269-300. Delestre, O., Darboux, F., James, F., Lucas, C., Laguerre, C., and Cordier, S., 2014. FullSWOF: A free software package for the simulation of shallow water flows. HAL Id: hal-00932234 https://hal.archives-ouvertes.fr/hal-00932234 Gourbesville, P., 2014. Hydroinformatics and Its Role in Flood Management. Hydrmeteorological Hazards: Interfacing Seience and Policy, 137-169. Hunter, N.M., Bates, P.D., Neelz, S., Pender, G., Villanueva, I., Wright, N.G., et al., 2008. Benchmarking 2D hydraulic models for urban flood simulations. Proceedings of the ICE - Water Management 2008; 16 (1) 13-30. Lang, P., Desombre, J., 2013. TELEMAC MODELLING SYSTEM Release 6.2. Meesuk, V., Vojinovic, Z.,Mynett, A.E., and Abdullah, A.F., 2014. Urban flood modelling combining top-view LiDAR data with ground-view SfM observations. Advances in Water Resources 75(2015) 105-117. Mignot, E., Paquier, A., and Haider, S., 2006. Modeling floods in a dense urban area using 2D shallow water equations. Journal of Hydrology (2006) 327, 186-199. Mitchell, J.K., 2003. European river floods in a changing world. Risk Anal.23, 567-574. Neal, J.C., Fewtrell T.J., Bates, P.D., and Wright, N.G., 2010. A comparison of three parallelisation methods for 2D flood inundation models. Environ Model Software 2010 25: 398-411. Powell A.E., 2010. The infrastructure roundtables: seeking solution to an American crisis. Civil Engineering-ASCE 2010, 80(4), 62-70. Schubert, J.E., Sanders, B.F., 2012. Building treatments for urban flood inundation models and implications for predictive skill and modeling efficiency. Advances in Water Resources 41(2012) 49-64. United Nations, 2010. World Urbanization Prospects: the 2009 Revision, United Nations, Department of Economic and Social Affairs, Population Division, New York 2010. 8