Research Article A Finite Difference Scheme for Compressible Local Refinement in Time
advertisement

Hindawi Publishing Corporation
Abstract and Applied Analysis
Volume 2013, Article ID 521835, 8 pages
http://dx.doi.org/10.1155/2013/521835
Research Article
A Finite Difference Scheme for Compressible
Miscible Displacement Flow in Porous Media on Grids with
Local Refinement in Time
Wei Liu
School of Mathematic and Quantitative Economics, Shandong University of Finance and Economics, Jinan 250014, China
Correspondence should be addressed to Wei Liu; liuwei@sdufe.edu.cn
Received 19 October 2012; Accepted 19 December 2012
Academic Editor: Xinan Hao
Copyright © 2013 Wei Liu. This is an open access article distributed under the Creative Commons Attribution License, which
permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
Considering two-dimensional compressible miscible displacement flow in porous media, finite difference schemes on grids with
local refinement in time are constructed and studied. The construction utilizes a modified upwind approximation and linear
interpolation at the slave nodes. Error analysis is presented in the maximum norm and numerical examples illustrating the theory
are given.
1. Introduction
Numerical models of percolation flow are almost built up
on a basis of the finite difference method to solve the system
of partial differential equations. Usually, grids that we used
are thinner, then the truncation error is smaller and the
computing accuracy is higher. In order to assure certain
computation accuracy, the grid number cannot be too little.
But on the other hand, along with the increment of the grid
number, the computation cost is greatly increased and the
algebraic system which is formed finally cannot be resolved,
even with the largest of today’s supercomputers. Actually,
we only need to refine grids around wells, cracks, obstacles,
domain boundaries, and so forth, where the pressure changes
radically. But because the finite difference grid is composed of
straight lines and the grid density cannot be varied with space,
it limits the simulating scale and the simulating accuracy.
For the local grid refinement technique, we still make use
of the finite difference grid system and divide partial grids
which are needed to be refined into fine grids. In this way,
we can resolve problems, such as small well spacing, fault,
and boundary, and we can improve the simulating accuracy
and extend the simulating scale [1]. Ewing et al. construct
some finite difference approximations on grids with local
refinement in space for the ellipse equation and obtain error
estimates in the 𝐻1 -norm [2]. Cai et al. analyze stationary
local grid refinement for the diffusion equation [3, 4]. Ewing
et al. derive implicit schemes on the basis of a finite volume
approach by approximation of the balance equation. This
approach leads to schemes that are locally conservative and
are absolutely stable [5]. Ewing et al. construct and study
finite difference schemes for transient convection-diffusion
problems on grids with local refinement in time and space.
The proposed schemes are unconditionally stable and use
linear interpolation along the interface [6]. Respectively for
incompressible miscible displacement flow in porous media
and the semiconductor device problem, authors discuss
discrete schemes, error estimates, and numerical examples
on composite triangular grids [7, 8].
In this paper, we study a finite difference scheme on
grids with local refinement in time for two-dimensional compressible miscible displacement flow in porous media. The
pressure equation is approximated by a five-point difference
scheme, and the saturation equation is discretized by a modified upwind scheme. At the slave nodes, the construction
utilizes linear interpolation. Finally, error analysis in the
maximum norm is derived and numerical examples are given
to support the numerical method and its convergence.
The paper is organized as follows. In Sections 2 and 3, we
formulate the problem and introduce the necessary notations.
In Section 4 the construction of the finite difference scheme
is presented. The error analysis is addressed in Section 5.
2
Abstract and Applied Analysis
Finally, in Section 6 we present numerical experiments that
conform our theoretical results.
2. Problem Formulation
where 𝑎∗ , 𝑎∗ , 𝑑∗ , 𝑑∗ , 𝐷∗ , 𝐷∗ , 𝐾∗ are positive constants
and 𝑑(𝑐), 𝑏(𝑐), and 𝑓(𝑐) are Lipschitz continuous in the 𝜀0
neighborhood of the solution.
We suppose that the exact solutions of (1) are distributed
smoothly; 𝑝 and 𝑐 satisfy
We will consider a system of three nonlinear partial differential equations in a bounded domain Ω ⊂ 𝑅2 , which forms
a basic model of compressible miscible displacement flow in
porous media [9–11]:
(a)
𝑑 (𝑐)
𝜕𝑝
+ ∇ ⋅ 𝑢 = 𝑞 (𝑥, 𝑡) ,
𝜕𝑡
𝑥 = (𝑥1 , 𝑥2 ) ∈ Ω,
𝑝, 𝑐 ∈ 𝐿∞ (0, 𝑇; 𝑊4,∞ (Ω)) ,
(6)
𝜕2 𝑝 𝜕 2 𝑐
,
∈ 𝐿∞ (0, 𝑇; 𝐿∞ (Ω)) .
𝜕𝑡2 𝜕𝑡2
Throughout this paper, the notations 𝐾𝑖 (𝑖 = 0, 1, . . . , 𝑀) are
used to denote generic constants.
𝑡 ∈ 𝐽 = [0, 𝑇] ,
(b)
𝑢 = −𝑎 (𝑐) ∇𝑝,
(c)
𝜙 (𝑥)
(𝑥, 𝑡) ∈ Ω × 𝐽,
𝜕𝑝
𝜕𝑐
+ 𝑏 (𝑐)
+ 𝑢 ⋅ ∇𝑐 − ∇ ⋅ (𝐷∇𝑐) = 𝑓 (𝑥, 𝑡, 𝑐) ,
𝜕𝑡
𝜕𝑡
(𝑥, 𝑡) ∈ Ω × 𝐽,
(1)
where
𝑐 = 𝑐1 = 1 − 𝑐2 ,
𝑎 (𝑐) = 𝑎 (𝑥, 𝑐) =
𝑘 (𝑥)
,
𝜇 (𝑐)
(2)
2
𝑑 (𝑐) = 𝑑 (𝑥, 𝑐) = 𝜙 (𝑥) ∑𝑍𝑗 𝑐𝑗 ,
𝑗=1
𝑐𝑖 (𝑖 = 1, 2) is the saturation of the 𝑖th component in mixed
liquid, 𝑍𝑗 is the 𝑗th component of compression constant
factor, 𝜙 is the porosity of the rock, 𝑘 is the permeability of
the rock, 𝜇 is the viscosity of the fluid, 𝐷 = 𝜙(𝑥)𝑑𝑚 𝐼 which is
the 2 × 2 diffusion matrix, 𝑑𝑚 is the diffusion coefficient, and
𝐼 is the unit matrix. The unknowns are the pressure function
𝑝(𝑥, 𝑡) and the saturation function 𝑐(𝑥, 𝑡).
In addition, we have boundary conditions
𝑝 = 𝑒 (𝑥, 𝑡) ,
𝑥 ∈ 𝜕Ω, 𝑡 ∈ 𝐽,
𝑐 = ℎ (𝑥, 𝑡) ,
𝑥 ∈ 𝜕Ω, 𝑡 ∈ 𝐽,
(3)
3. Grids, Grid Functions, and
Associated Notations
First, Ω = [0, 1]2 is discretized using a regular grid with a
parameter ℎ. The spatial nodes of the grid on Ω are then
defined by 𝑥 = (𝑥1 , 𝑥2 ) = (𝑛1 ℎ, 𝑛2 ℎ), where 𝑛1 = 0, . . . , 𝑁,
𝑛2 = 0, . . . , 𝑁, ℎ = 1/𝑁. Next, we introduce closed domains
{Ω𝑘 }𝑀
𝑘=1 , which are subsets of Ω with boundaries aligned
with the spatial discretization already defined. Further, it is
𝑀
required that ⋃𝑀
𝑘=1 Ω𝑘 ⊂ Ω, and we set Ω0 = Ω \ ⋃𝑘=1 Ω𝑘 .
In order to avoid unnecessary complications, for 𝑖, 𝑗 > 0, we
assume that dist(Ω𝑖 , Ω𝑗 ) ≥ 𝑙ℎ, where 𝑙 > 1 is an integer.
With each subdomain Ω𝑖 , we associate corresponding sets
of nodal points: 𝜔𝑖 is defined to be the set of all nodes of the
discretization of Ω that are in Ω𝑖 . We require 𝜔𝑖 ⋂ 𝜔𝑗 = 0,
for 𝑖 ≠ 𝑗, 𝑖, 𝑗 = 0, . . . , 𝑀. And assume that there is no spatial
refinement. In each 𝜔𝑖 , 𝑖 = 0, . . . , 𝑀, we define a subset
of boundary nodes 𝛾𝑖 as the nodes which have at least one
neighbor not in 𝜔𝑖 . Then set 𝜔 = ⋃𝑀
𝑖=0 𝜔𝑖 .
A discrete time-step 𝜏𝑖 is associated with each Ω𝑖 such
that, for integers 𝑚𝑖 ,
𝜏0 = 𝑚𝑖 𝜏𝑖 ,
𝑖 = 0, . . . , 𝑀,
𝑗
𝑝 (𝑥, 0) = 𝑝0 (𝑥) ,
𝑥 ∈ Ω,
𝑐 (𝑥, 0) = 𝑐0 (𝑥) ,
𝑥 ∈ Ω,
𝑥∈𝜔𝑖
𝑗=1,2,...
(4)
where Ω is a plane bounded domain and 𝜕Ω is the boundary
of Ω.
Usually this question is positive. Suppose the coefficients
of (1) satisfy
0 < 𝑎∗ ≤ 𝑎 (𝑐) ≤ 𝑎∗ ,
0 < 𝐷∗ ≤ 𝐷 (𝑥) ≤ 𝐷 ,
𝜕𝑎
∗
(𝑥, 𝑐) ≤ 𝐾 ,
𝜕𝑐
𝑗
𝑖 = 0, . . . , 𝑀,
𝑀
𝑔 = ⋃𝑔𝑖 .
𝑖=0
(8)
We continue by specifying the nodes in 𝑔𝑖 between time levels
𝑡0𝑙 and 𝑡0𝑙+1 as
𝑚𝑖
𝑚𝑖
𝑥∈𝜔𝑖
𝑗=0
𝑥∈𝜔𝑖
𝑗=0
𝑙,𝑗
𝑔𝑖𝑙 = ⋃ (𝑥, 𝑡0𝑙 + 𝑗𝜏𝑖 ) = ⋃ (𝑥, 𝑡𝑖 ) ,
(9)
𝑙,𝑗
𝑡𝑖 = 𝑡0𝑙 + 𝑗𝜏𝑖 , 𝑖 = 0, . . . , 𝑀.
0 < 𝑑∗ ≤ 𝑑 (𝑐) ≤ 𝑑∗ ,
∗
(7)
Consequently, discrete time levels 𝑡𝑖 for Ω𝑖 are defined by 𝑡𝑖 =
𝑗𝜏𝑖 , 𝑗 = 1, 2, . . . , [𝑇/𝜏𝑖 ]. Finally, we define the grid points 𝑔 by
setting
𝑔𝑖 = ⋃ (𝑥, 𝑗𝜏𝑖 ) ,
and initial conditions
𝑚0 = 1.
(5)
Correspondingly, the boundary nodes of 𝑔𝑖𝑙 are defined by
𝑚𝑖
𝑙,𝑗
𝜕𝑔𝑖𝑙 = ⋃ (𝑥, 𝑡𝑖 ) ,
𝑥∈𝛾𝑖
𝑗=0
𝑖 = 0, . . . , 𝑀.
(10)
Abstract and Applied Analysis
3
The grid function 𝑦(𝑥, 𝑡) is a function defined at the grid
points of 𝑔. we denote the nodal values of a grid function
𝑦(𝑥, 𝑡) between time levels 𝑡0𝑙 and 𝑡0𝑙+1 as
𝑦 (𝑥, 𝑡) =
𝑙,𝑗
𝑦 (𝑥1 , 𝑥2 , 𝑡𝑖 )
𝑦𝑛𝑙,𝑗1 ,𝑛2 ,
=
(11)
for 𝑥 ∈ 𝜔𝑖 , 𝑖 > 0, 𝑗 = 0, . . . , 𝑚𝑖 . For 𝑥 ∈ 𝜔0 we define
𝑦 (𝑥, 𝑡) = 𝑦 (𝑥1 , 𝑥2 , 𝑡0𝑙+1 ) = 𝑦𝑛𝑙+1
.
1 ,𝑛2
𝑦𝑙 (𝑥) − 𝑦0𝑙−1 (𝑥)
,
(𝑥) = 0
𝜏0
𝑙,𝑗
𝑙,𝑗
𝛿𝜏𝑖 𝑦𝑖 (𝑥) =
𝑙,𝑗−1
𝑦𝑖 (𝑥) − 𝑦𝑖
𝜏𝑖
(𝑥)
(12)
ℎ
1
𝑙
𝑈1,0
(𝑥) = − [𝐴𝑙0 (𝑥1 + , 𝑥2 ) 𝛿𝑥1 𝑃0𝑙+1 (𝑥)
2
2
𝑥 ∈ 𝜔0 ,
,
𝑥 ∈ 𝜔𝑖 ,
(13)
4. Construction of the Finite
Difference Schemes
Let 𝑃, 𝑈, and 𝐶 be the numerical approximations to the
pressure 𝑝, the velocity 𝑢, and the saturation 𝑐, respectively.
The approximation for the pressure and the concentration
approximation are done on composite grids in time.
First for the pressure equation, we let
ℎ
𝐴𝑙0 (𝑥1 + , 𝑥2 )
2
(17)
𝑙
corresponds to another direction, and the computational
𝑈2,0
𝑙
.
formula is similar to 𝑈1,0
Next we consider the saturation equation (1)(c). The
positive and negative of the function 𝑣 are defined as 𝑣+ =
(1/2)(𝑣 + |𝑣|) ≥ 0 and 𝑣− = (1/2)(𝑣 − |𝑣|) ≤ 0. For regular
coarse grids, the upwind difference scheme of the saturation
equation is
𝜙 (𝑥) 𝛿𝜏0 𝐶0𝑙+1 (𝑥) − 𝐿𝑐ℎ 𝐶0𝑙+1 (𝑥)
= 𝑓 (𝑥, 𝑡0𝑙 , 𝐶0𝑙 (𝑥)) − 𝑏 (𝐶0𝑙 (𝑥)) 𝛿𝜏0 𝑃0𝑙+1 (𝑥) ,
𝐿𝑐ℎ 𝐶0𝑙+1 (𝑥) = (1 +
𝑥 ∈ 𝑔0𝑙 ,
(18)
ℎ 𝑙 −1 −1
𝑈 𝐷 ) 𝛿𝑥1 (𝐷𝛿𝑥1 𝐶0𝑙+1 ) (𝑥)
2 1,0
+ (1 +
Similarly we define 𝐴𝑙0 (𝑥1 , 𝑥2 + ℎ/2), then let
ℎ 𝑙 −1 −1
𝑈 𝐷 ) 𝛿𝑥2 (𝐷𝛿𝑥2 𝐶0𝑙+1 ) (𝑥)
2 2,0
𝑙+1
𝑙+1
− 𝛿𝑈1,0
𝑙
𝑙
(𝑥) − 𝛿𝑈2,0
(𝑥) ,
,𝑥1 𝐶
,𝑥2 𝐶
𝛿𝑥1 (𝐴𝑙0 𝛿𝑥1 𝑃0𝑙+1 ) (𝑥)
𝑙+1
𝛿𝑈1,0
𝑙
,𝑥1 𝐶0 (𝑥)
ℎ
= ℎ−2 [𝐴𝑙0 (𝑥1 + , 𝑥2 ) (𝑃0𝑙+1 (𝑥1 + ℎ, 𝑥2 ) − 𝑃0𝑙+1 (𝑥))
2
𝑙
= 𝑈1,0
(𝑥)
ℎ
−𝐴𝑙0 (𝑥1 − , 𝑥2 ) (𝑃0𝑙+1 (𝑥) − 𝑃0𝑙+1 (𝑥1 − ℎ, 𝑥2 ))] ,
2
𝛿𝑥2 (𝐴𝑙0 𝛿𝑥2 𝑃0𝑙+1 ) (𝑥)
𝑙
× {𝐻 (𝑈1,0
(𝑥)) 𝐷−1 𝐷𝑥1 −ℎ/2,𝑥2 𝛿𝑥1 𝐶0𝑙+1 (𝑥)
𝑙
+ (1 − 𝐻 (𝑈1,0
(𝑥))) 𝐷−1 𝐷𝑥1 +ℎ/2,𝑥2 𝛿𝑥1 𝐶0𝑙+1 (𝑥)} ,
𝑙+1
𝛿𝑈2,0
𝑙
,𝑥2 𝐶0 (𝑥)
ℎ
= ℎ−2 [𝐴𝑙0 (𝑥1 , 𝑥2 + ) (𝑃0𝑙+1 (𝑥1 , 𝑥2 + ℎ) − 𝑃0𝑙+1 (𝑥))
2
𝑙
= 𝑈2,0
(𝑥)
ℎ
−𝐴𝑙0 (𝑥1 , 𝑥2 − ) (𝑃0𝑙+1 (𝑥) − 𝑃0𝑙+1 (𝑥1 , 𝑥2 − ℎ))] ,
2
=
ℎ
(𝑥1 − , 𝑥2 ) 𝛿𝑥1 𝑃0𝑙+1 (𝑥)] .
2
where
1
[𝑎 (𝑥, 𝐶0𝑙 (𝑥)) + 𝑎 (𝑥1 + ℎ, 𝑥2 , 𝐶0𝑙 (𝑥1 + ℎ, 𝑥2 ))] .
2
(14)
∇ℎ (𝐴𝑙0 ∇ℎ 𝑃0𝑙+1 ) (𝑥)
𝑥 ∈ 𝑔0𝑙 ,
(16)
where the difference operator 𝐿 ℎ 𝑃0𝑙+1 (𝑥) = −∇ℎ (𝐴𝑙0 ∇ℎ 𝑃0𝑙+1 )
𝑙
𝑙
(𝑥). The Darcy velocity 𝑈𝑙 = (𝑈1,0
, 𝑈2,0
) is computed as
follows:
+𝐴𝑙0
𝑗 = 1, 2, . . . , 𝑚𝑖 , 𝑖 = 1, . . . , 𝑀.
=
𝑝
𝑑 (𝐶0𝑙 (𝑥)) 𝛿𝜏0 𝑃0𝑙+1 (𝑥) − 𝐿 ℎ 𝑃0𝑙+1 (𝑥) = 𝑞0𝑙+1 (𝑥) ,
𝑝
𝛿𝑥1 , 𝛿𝑥1 and 𝛿𝑥2 , 𝛿𝑥2 are the divided forward and backward
difference operators, respectively, in 𝑥1 and 𝑥2 direction. Also
define the divided backward time difference by
𝛿𝜏0 𝑦0𝑙
For regular coarse grids, the five-point difference scheme
is
𝛿𝑥1 (𝐴𝑙0 𝛿𝑥1 𝑃0𝑙+1 ) (𝑥)
𝑙
× {𝐻 (𝑈2,0
(𝑥)) 𝐷−1 𝐷𝑥1 ,𝑥2 −ℎ/2 𝛿𝑥2 𝐶0𝑙+1 (𝑥)
𝑙
+ (1 − 𝐻 (𝑈2,0
(𝑥))) 𝐷−1 𝐷𝑥1 ,𝑥2 +ℎ/2 𝛿𝑥2 𝐶0𝑙+1 (𝑥)} ,
𝐻 (𝑧) = {
+ 𝛿𝑥2 (𝐴𝑙0 𝛿𝑥2 𝑃0𝑙+1 ) (𝑥) .
(15)
1, 𝑧 ≥ 0,
0, 𝑧 < 0.
(19)
4
Abstract and Applied Analysis
𝑙,𝑗
𝑈1,𝑖 (𝑥)
𝑡∗
∗
𝑡0𝑙+1
∗
ℎ
1
𝑙,𝑗
𝑙,𝑗+1
= − [𝐴 𝑖 (𝑥1 + , 𝑥2 ) 𝜕𝑥1 𝑃𝑖
(𝑥)
2
2
𝑡𝑖𝑙,3
𝑡𝑖𝑙,2
𝑙,𝑗
+𝐴 𝑖
𝑡𝑖𝑙,1
∗
∗
𝜏𝑖
𝜏0
∗
𝛾0
ℎ
∗
Ω0 , 𝜔0
∗
𝑙,𝑗
𝑙
𝑈2,0
, 𝑈2,𝑖 correspond to another direction, and computational
formulae are similar to (22).
𝜙 (𝑥) 𝛿𝜏0 𝐶0𝑙+1 (𝑥) − 𝐿𝑐ℎ 𝐶0𝑙+1 (𝑥)
𝑥
Ω𝑖 , 𝜔𝑖
𝛾𝑖
(22)
𝑥 ∈ 𝑔𝑖𝑙 , 𝑖 = 1, . . . , 𝑀, 𝑚 = 1, 2.
𝑡0𝑙
∗
ℎ
𝑙,𝑗+1
(𝑥1 − , 𝑥2 ) 𝜕𝑥1 𝑃𝑖
(𝑥)] ,
2
= 𝑓 (𝑥, 𝑡0𝑙 , 𝐶0𝑙 (𝑥))
∗ Grid points 𝑔0
Grid points 𝑔𝑖
Slave nodes
− 𝑏 (𝐶𝑙 (𝑥)) 𝛿𝜏0 𝑃0𝑙+1 (𝑥) ,
𝑥 ∈ 𝑔0𝑙 ,
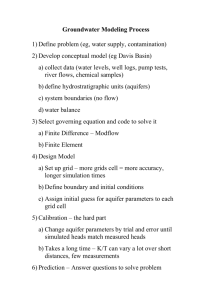
Figure 1: Grid with local refinement in time.
𝑙,𝑗+1
𝜙 (𝑥) 𝛿𝜏𝑖 𝐶𝑖
In the region that is refined in time, we can construct
finite difference schemes similar to (16)–(18). It is obvious that
𝑙,𝑗
at time 𝑡𝑖 = 𝑙𝜏0 + 𝑗𝜏𝑖 , 𝑗 = 1, . . . , 𝑚𝑖 , when the difference
operators defined above are applied to the points of 𝛾𝑖 , not all
space-time positions required correspond to actual nodes in
𝑔. For such cases, we define
𝑙,𝑗
𝑃 (𝑥, 𝑡𝑖 )
𝑙,𝑗
𝑗
𝑚 −𝑗
=
𝑃 (𝑥, 𝑡0𝑙+1 ) + 𝑖
𝑃 (𝑥, 𝑡0𝑙 ) ,
𝑚𝑖
𝑚𝑖
𝐶 (𝑥, 𝑡𝑖 ) =
(20)
𝑗
𝑚 −𝑗
𝐶 (𝑥, 𝑡0𝑙+1 ) + 𝑖
𝐶 (𝑥, 𝑡0𝑙 ) .
𝑚𝑖
𝑚𝑖
In Figure 1, the slave nodes represent the missing space-time
positions in the stencil of nodes in 𝜕𝑞𝑖𝑙 , 𝑖 > 0. The values there
are computed by the interpolation formula (20).
The discretization schemes of (1)–(4) on composite grids
are given by
𝑝
𝑑 (𝐶0𝑙 (𝑥)) 𝛿𝜏0 𝑃0𝑙+1 (𝑥) − 𝐿 ℎ 𝑃0𝑙+1 (𝑥) = 𝑞0𝑙+1 (𝑥) ,
𝑙,𝑗
𝑙,𝑗+1
𝑑 (𝐶𝑖 (𝑥)) 𝛿𝜏𝑖 𝑃𝑖
𝑝
𝑙,𝑗+1
(𝑥) = 𝑞𝑖
𝑥∈
𝑔𝑖𝑙 ,
(𝑥) − 𝐿 ℎ 𝑃𝑖
𝑃 (𝑥, 𝑡) = 𝑒 (𝑥, 𝑡) ,
𝑙,𝑗+1
𝑥 ∈ 𝑔0𝑙 ,
(𝑥) ,
𝑙,𝑗
𝑙,𝑗+1
(𝑥) − 𝐿𝑐ℎ 𝐶𝑖
(𝑥)
𝑙,𝑗
= 𝑓 (𝑥, 𝑡𝑖 , 𝐶𝑖 (𝑥))
𝑙,𝑗
𝑙,𝑗+1
− 𝑏 (𝐶𝑖 (𝑥)) 𝛿𝜏0 𝑃𝑖
𝑥 ∈ 𝑔𝑖𝑙 , 𝑖 = 1, . . . , 𝑀,
(𝑥) ,
𝐶 (𝑥, 𝑡) = ℎ (𝑥, 𝑡) ,
𝑥 ∈ 𝜕Ω.
(23)
5. Error Analysis
The discrete inner product and 𝐿2 -norm of grid functions are
defined, respectively, by
(𝑦, 𝑣) = ∑ ℎ2 𝑦 (𝑥) 𝑣 (𝑥) ,
𝑥∈𝜔
We also use the standard notation for the discrete 𝐻1 -norm
of a grid function in the Sobolev space 𝐻01 (𝜔):
2
2
2
2
𝑦1,𝜔 = 𝑦0,𝜔 + ∑𝛿𝑥𝑖 𝑦0,𝜔 .
(25)
𝑖=1
𝑖 = 1, . . . , 𝑀,
Define the error of the above scheme by
𝑥 ∈ 𝜕Ω,
(21)
𝜋0𝑙 (𝑥) = 𝑝0𝑙 (𝑥) − 𝑃0𝑙 (𝑥) ,
𝜉0𝑙 (𝑥) = 𝑐0𝑙 (𝑥) − 𝐶0𝑙 (𝑥) ,
𝑙
𝑈1,0
(𝑥)
𝑙,𝑗
𝑙,𝑗
𝑥 ∈ 𝜔0 ,
𝑙,𝑗
𝜋𝑖 (𝑥) = 𝑝𝑖 (𝑥) − 𝑃𝑖 (𝑥) ,
1
ℎ
= − [𝐴𝑙0 (𝑥1 + , 𝑥2 ) 𝜕𝑥1 𝑃0𝑙+1 (𝑥)
2
2
ℎ
+𝐴𝑙0 (𝑥1 − , 𝑥2 ) 𝜕𝑥1 𝑃0𝑙+1 (𝑥)] ,
2
(24)
1/2
𝑦0,𝜔 = (𝑦, 𝑦) .
𝑙,𝑗
𝑙,𝑗
𝑙,𝑗
𝜉𝑖 (𝑥) = 𝑐𝑖 (𝑥) − 𝐶𝑖 (𝑥) ,
𝑥 ∈ 𝑔0𝑙 ,
𝑥 ∈ 𝜔𝑖 , 𝑖 = 1, . . . , 𝑀.
(26)
Abstract and Applied Analysis
5
Firstly consider the pressure equation. Using (1)(a) and
(21), we get the error equation:
(a)
𝜋 (𝑥, 𝑡) = 0,
(b)
𝑑 (𝐶0𝑙
𝑥 ∈ 𝜕Ω,
(𝑥)) 𝛿𝜏0 𝜋0𝑙+1
(𝑥) −
𝑝
𝐿 ℎ 𝜋0𝑙+1
= 𝐾0 (ℎ2 + 𝜏0 + 𝜉0𝑙 (𝑥)) ,
(c)
𝑙,𝑗
𝑙,𝑗+1
𝑑 (𝐶𝑖 (𝑥)) 𝛿𝜏𝑖 𝜋𝑖
𝑥 ∈ 𝑔0𝑙 ,
𝑝 𝑙,𝑗+1
𝑙,𝑗
= 𝐾𝑖 (ℎ2 + 𝜏𝑖 + 𝜉𝑖 (𝑥)) ,
𝑙,𝑗
𝑙,𝑗+1
𝑑 (𝐶𝑖 (𝑥)) 𝛿𝜏𝑖 𝜋𝑖
𝑥 ∈ 𝑔𝑖𝑙 \ 𝜕𝑔𝑖𝑙 ,
𝑝 𝑙,𝑗+1
(𝑥) − 𝐿 ℎ 𝜋𝑖
𝜏2
𝑙,𝑗
= 𝐾𝑖 (ℎ + 𝜏𝑖 + 02 + 𝜉𝑖 (𝑥)) ,
ℎ
(27)
2
− (𝐿𝑐ℎ 𝜑, 𝜑) ≥ 𝜇𝜑1,𝜔 ,
∀𝜑 ∈ 𝐻01 (𝜔) .
(33)
𝑙
𝑙
𝑢𝑚,0
− 𝑈𝑚,0
= 𝐾0 (𝜉0𝑙 + ∇ℎ 𝜋0𝑙 + ℎ2 ) ,
𝑥 ∈ 𝜕𝑔𝑖𝑙 ,
𝑙,𝑗
𝑙,𝑗
𝑙,𝑗
𝑙,𝑗
𝑢𝑚,𝑖 − 𝑈𝑚,𝑖 = 𝐾𝑖 (𝜉𝑖 + ∇ℎ 𝜋𝑖 + ℎ2 ) ,
(34)
𝑚 = 1, 2, 𝑖 = 1, 2, . . . , 𝑀,
and using (1)(c), (23), we can get the error equation of the
saturation equation
Using (27)(b), we can get
𝜏0
𝑝
𝐿 𝜋𝑙+1 (𝑥)
𝑑 (𝐶0𝑙 (𝑥)) ℎ 0
2
+ 𝐾0 𝜏0 (ℎ + 𝜏0 +
𝜉0𝑙
𝜉 (𝑥, 𝑡) = 0,
(28)
(𝑥)) .
𝑥
+ 𝐾0 𝜏0 (ℎ + 𝜏0 + max 𝜉0𝑙 (𝑥)) .
𝑥
2
(29)
𝑑 (𝐶0𝑙+1 (𝑥))
−
𝑙,𝑗+1
𝐿𝑐ℎ 𝜉𝑖
𝑙,𝑗+1
= 𝐾𝑖 (𝜏𝑖 + ℎ2 + 𝜉𝑖
𝑙,𝑗+1
+
𝑥 ∈ 𝑔0𝑙 ,
𝑏 (𝐶𝑖
(𝑥))
𝑙,𝑗+1
𝑑 (𝐶𝑖
(𝑥))
𝑙,𝑗+1
+ ∇ℎ 𝜋𝑖
𝑝
𝐿 ℎ 𝜋0𝑙+1
𝑝 𝑙,𝑗+1
𝐿 ℎ 𝜋𝑖
𝑥 ∈ 𝑔𝑖𝑙 \ 𝜕𝑔𝑖𝑙 ,
),
(35)
𝑖 = 1, . . . , 𝑀,
With the method of recursion and noticing that 𝜋00 (𝑥) = 0,
we obtain the error estimate:
𝑙
max 𝜋0𝑙+1 (𝑥) ≤ 𝐾0 𝜏0 (ℎ2 + 𝜏0 + ∑ max 𝜉0𝑘 (𝑥)) .
𝑥
𝑥
𝑏 (𝐶0𝑙+1 (𝑥))
= 𝐾0 (𝜏0 + ℎ2 + 𝜉𝑙+1 + ∇ℎ 𝜋𝑙+1 ) ,
𝑙,𝑗+1
𝜙 (𝑥) 𝛿𝜏𝑖 𝜉𝑖
max 𝜋0𝑙+1 (𝑥) ≤ max 𝜋0𝑙 (𝑥)
𝑥 ∈ 𝜕Ω,
𝜙 (𝑥) 𝛿𝜏0 𝜉0𝑙+1 − 𝐿𝑐ℎ 𝜉0𝑙+1 +
Then using the maximum principle
𝑥
(32)
Considering
(𝑥)
𝑖 = 1, . . . , 𝑀.
𝜋0𝑙+1 (𝑥) = 𝜋0𝑙 (𝑥) +
𝑚 = 1, 2, ℎ → 0,
Theorem 1. The finite difference schemes (23) comply with
the requirements of the maximum principle and the difference
operator 𝐿𝑐ℎ is coercive in 𝐻01 , that is, ∃𝜇 > 0 such that
(𝑥)
𝑖 = 1, . . . , 𝑀,
(d)
𝑙,𝑗
𝑈 ≤ 𝑈,
𝑚,𝑖
𝑙
𝑈𝑚,0 ≤ 𝑈,
where 𝑈 is a positive constant. In the end of error analysis, we
will prove the supposition (32). Under the supposition (32),
we can prove the discretizations (23) satisfy the following
property.
(𝑥)
(𝑥) − 𝐿 ℎ 𝜋𝑖
Then we consider the saturation equation. Suppose that
(30)
𝑘=0
Similarly using (27)(c) and (27)(d),
𝑗
𝑙,𝑗+1
max 𝜋𝑖 (𝑥) ≤ 𝐾𝑖 𝜏𝑖 (ℎ2 + 𝜏𝑖 + ∑ max 𝜉𝑖𝑙,𝑘 (𝑥)) ,
𝑥
𝑥
𝑘=0
𝑗
𝑙,𝑗+1
𝜏02
max 𝜋𝑖 (𝑥) ≤ 𝐾𝑖 𝜏𝑖 (ℎ + 𝜏𝑖 + 2 + ∑ max 𝜉𝑖𝑙,𝑘 (𝑥)) .
𝑥
𝑥
ℎ
𝑘=0
(31)
𝑙,𝑗+1
𝜙 (𝑥) 𝛿𝜏𝑖 𝜉𝑖
𝑙,𝑗+1
− 𝐿𝑐ℎ 𝜉𝑖
= 𝐾𝑖 (𝜏𝑖 + ℎ +
+
𝑏 (𝐶𝑖
𝑙,𝑗+1
(𝑥))
𝑙,𝑗+1
𝑑 (𝐶𝑖
(𝑥))
𝑝 𝑙,𝑗+1
𝐿 ℎ 𝜋𝑖
𝜏02
𝑙,𝑗+1
𝑙,𝑗+1
+ 𝜉𝑖
+ ∇ℎ 𝜋𝑖 ) ,
ℎ2
𝑥 ∈ 𝜕𝑔𝑖𝑙 ,
𝑖 = 1, . . . , 𝑀.
We need an induction hypothesis. Let 𝜏0 = 𝑂(ℎ), we
assume that
𝑙
𝜉0 = 𝑂 (log ℎ1/2 ℎ) ,
(36)
𝑙,𝑗
𝜉 = 𝑂 (log ℎ1/2 ℎ) , ℎ → 0,
𝑖
for 0 ≤ 𝑙 ≤ 𝑛, 0 ≤ 𝑗 ≤ 𝑛. When 𝑛 = 0, we can obtain (36) by
using (4) and (23). At the end of error analysis, we will prove
(36) for 𝑙 = 𝑛 + 1, 𝑗 = 𝑛 + 1.
6
Abstract and Applied Analysis
From error estimates of the pressure equation (30) and
(31) and the induction hypothesis (36), we have
𝜉 (𝑥, 𝑡) = 0,
𝑥 ∈ 𝜕Ω,
𝜙 (𝑥) 𝛿𝜏0 (𝜂 (𝑥) − 𝜉𝑙+1 (𝑥)) − 𝐿𝑐ℎ (𝜂 (𝑥) − 𝜉𝑙+1 (𝑥)) ≥ 0,
𝜙 (𝑥) 𝛿𝜏0 𝜉0𝑙+1 − 𝐿𝑐ℎ 𝜉0𝑙+1
𝑥 ∈ 𝑔0𝑙 ,
1/2
= 𝐾0 (𝜏0 + ℎ2 + log ℎ ℎ) ,
𝑙,𝑗+1
𝜙 (𝑥) 𝛿𝜏𝑖 𝜉𝑖
where 𝐶𝑖 = max𝑔𝑖𝑙 \𝜕𝑔𝑖𝑙 |𝐾𝑖 (𝑥, 𝑡)|, 𝐼𝑖 = max𝜕𝑔𝑖𝑙 |𝐾𝑖 (𝑥, 𝑡)|. Using
induction over 𝑙, it easy to observe that
𝑥 ∈ 𝑔0𝑙 ,
𝑙,𝑗+1
𝜙 (𝑥) 𝛿𝜏𝑖 (𝜂 (𝑥) − 𝜉𝑖
𝑙,𝑗+1
− 𝐿𝑐ℎ 𝜉𝑖
1/2
= 𝐾𝑖 (𝜏𝑖 + ℎ2 + log ℎ ℎ) ,
𝑥 ∈ 𝑔𝑖𝑙 \ 𝜕𝑔𝑖𝑙 ,
𝑙,𝑗+1
𝜙 (𝑥) 𝛿𝜏𝑖 𝜉𝑖
(37)
Moreover,
(𝜂 (𝑥) − 𝜉 (𝑥, 𝑡))𝜕Ω ≥ 0,
𝑙,𝑗+1
− 𝐿𝑐ℎ 𝜉𝑖
= 𝐾𝑖 (𝜏𝑖 + ℎ +
𝜏02
ℎ2
∀𝑡 ≥ 0.
(43)
Using the maximum principle, it follows that
1/2
+ log ℎ ℎ) ,
𝜉0𝑙 ≤ 𝜂 (𝑥) ,
𝑙,𝑗
𝜉𝑖 (𝑥) ≤ 𝜂 (𝑥) ,
𝑥 ∈ 𝜕𝑔𝑖𝑙 , 𝑖 = 1, . . . , 𝑀.
In order to get an estimate for the error 𝜉(𝑥, 𝑡), we need
two types of auxiliary functions 𝜓𝑖 and 𝜑𝑖 . The grid functions
𝑀
{𝜓𝑖 (𝑥)}𝑀
𝑖=0 and {𝜑𝑖 (𝑥)}𝑖=1 , respectively, satisfy
𝜓𝑖 (𝑥)𝜕Ω = 0,
−𝐿𝑐ℎ 𝜓𝑖 (𝑥) = 𝜒𝑖 (𝑥) ,
(38)
−𝐿𝑐ℎ 𝜑𝑖 (𝑥) = 𝛼𝑖 (𝑥) ,
𝜑𝑖 (𝑥)𝜕Ω = 0,
where 𝜒𝑖 (𝑥) is the characteristic function of 𝜔𝑖 \𝛾𝑖 , 𝜒0 (𝑥) is the
characteristic function of 𝜔0 , and 𝛼𝑖 (𝑥) is the characteristic
function of 𝛾𝑖 . On condition that 𝐿𝑐ℎ is coercive in 𝐻01 , Ewing
et al. have proved 𝜓𝑖 and 𝜑𝑖 satisfy the following lemma [6].
𝑀
Lemma 2. {𝜓𝑖 (𝑥)}𝑀
𝑖=0 and {𝜑𝑖 (𝑥)}𝑖=1 exist and are nonnegative,
and the following estimates hold:
1/2
max𝜓𝑖 (𝑥) ≤ 𝐶log ℎ ,
𝜔
1/2
max𝜑𝑖 (𝑥) ≤ 𝐶ℎlog ℎ .
𝜔
(39)
Theorem 3. Let the exact solutions 𝑐(𝑥, 𝑡) of (1) satisfy the
condition (6), then the discretization scheme (23) is stable, and
if 𝜏0 = 𝑂(ℎ) the following estimate for the error holds:
𝑖=0
𝜏2
1/2
+𝐼𝑖 (ℎ𝜏𝑖 + 0 + log ℎ ℎ2 )} .
ℎ
(40)
𝑀
1/2
𝜂 (𝑥) = ∑𝜓𝑖 (𝑥) 𝐶𝑖 (𝜏𝑖 + ℎ2 + log ℎ ℎ)
+ ∑𝜑𝑖 (𝑥) 𝐼𝑖 (𝜏𝑖 + ℎ +
𝜏02
1/2
+ log ℎ ℎ) ,
ℎ2
𝑥 ∈ 𝜔𝑖 , 𝑖 = 1, . . . , 𝑀,
(44)
𝑗 = 1, 2, . . . , 𝑚𝑖 .
Similarly,
−𝜉0𝑙 ≤ 𝜂 (𝑥) ,
𝑙,𝑗
−𝜉𝑖 (𝑥) ≤ 𝜂 (𝑥) ,
𝑥 ∈ 𝜔0 ,
𝑥 ∈ 𝜔𝑖 , 𝑖 = 1, . . . , 𝑀,
(45)
𝑗 = 1, 2, . . . , 𝑚𝑖 .
Therefore,
max 𝜉 ≤ 𝜂 (𝑥) ,
𝑔
𝑥 ∈ 𝜔𝑖 , 𝑖 = 0, . . . , 𝑀.
(46)
Then in view of (39), we conclude (40).
It remains to check (32) and the induction hypothesis (36)
for 𝑙 = 𝑛 + 1. From 𝜏0 = 𝑂(ℎ) and the error estimate (40), it is
easy to obtain (36). Then using (30) and (31), (34), and (40),
we can obtain the supposition (32). The proof of Theorem 3
is complete.
6. Numerical Results
𝜕𝑝 𝜕𝑢
+
= 𝑞 (𝑥, 𝑡) ,
𝜕𝑡 𝜕𝑥
𝑢=−
𝜕𝑝
,
𝜕𝑥
(𝑥, 𝑡) ∈ Ω × 𝐽,
(𝑥, 𝑡) ∈ Ω × 𝐽,
𝜕𝑐 𝜕𝑝
𝜕𝑐
𝜕2 𝑐
+
+𝑢⋅
− 𝐷 (𝑥) 2
𝜕𝑡 𝜕𝑡
𝜕𝑥
𝜕𝑥
Proof. Define
𝑖=0
𝑥 ∈ 𝜔0 ,
We consider a system of coupled partial differential equations:
𝑀
1/2
1/2
2
max
𝜉 ≤ log ℎ ∑ {𝐶𝑖 (𝜏𝑖 + ℎ + log ℎ ℎ)
𝑔
𝑖=1
(𝑥)) ≥ 0,
𝑥 ∈ 𝑔𝑖𝑙 , 𝑖 = 1, . . . , 𝑀.
(42)
𝑖 = 1, . . . , 𝑀,
𝑀
𝑙,𝑗+1
(𝑥)) − 𝐿𝑐ℎ (𝜂 (𝑥) − 𝜉𝑖
= 𝑓 (𝑐, 𝑥, 𝑡) ,
(41)
(𝑥, 𝑡) ∈ Ω × 𝐽,
𝑐 (𝑥, 0) = 𝑐0 (𝑥) ,
𝑐 (0, 𝑡) = 𝑐𝑙 (𝑡) ,
(47)
𝑥 ∈ Ω,
𝑐 (1, 𝑡) = 𝑐𝑟 (𝑡) ,
𝑡 ∈ 𝐽,
Abstract and Applied Analysis
7
Table 1: Error estimate in maximum norm when 𝐷(𝑥) = 1.
𝑡 = 0.5
𝑚
1
2
4
8
𝑡=1
𝛾
0.0159
0.0062
0.0026
0.0012
Computational cost
0.1560
0.5780
2.3440
9.2810
Reduction
𝛾
0.0356
0.0137
0.0058
0.0026
Computational cost
0.3130
1.1560
4.6080
18.6800
2.56
2.38
2.17
Reduction
2.60
2.36
2.23
Table 2: Error estimate in maximum norm when 𝐷(𝑥) = 𝑥.
𝑡 = 0.5
𝑚
1
2
4
8
𝑡=1
𝛾
0.0535
0.0254
0.0124
0.0061
Computational cost
0.1710
0.5920
2.3840
9.8810
Reduction
𝛾
0.1342
0.0641
0.0313
0.0154
Computational cost
0.3270
1.1680
4.6590
19.7440
2.11
2.05
2.03
6
0.35
5
0.3
Reduction
2.10
2.05
2.03
0.25
4
0.2
3
0.15
2
0.1
1
0
0.05
0
0.5
1
1.5
2
𝑡 = 0.5
𝑡=1
0
0
0.5
1
1.5
2
𝑡 = 0.5
𝑡=1
Figure 2: The exact solution 𝑝.
Figure 3: The exact solution 𝑐.
where Ω = [0, 2]2 , 𝐽 = [0, 𝑇]. The following functions are
used as exact solutions of (47):
numerical approximation to 𝑐 obtained by (23). And let the
error estimate in maximum norm 𝛾 = max𝑔 |𝑐 − 𝐶|.
𝑝 = exp (𝑡 − 𝑡2 ) exp (−35𝑥2 + 40𝑥 − 10) ,
Example 4. Let 𝐷(𝑥) = 1. Choosing 𝑚 = 1, 2, 4, 8, computational results obtained by (23) are shown in Figures 4 and 5
and Table 1.
𝑐 = exp (𝑡) exp (−37𝑥2 + 45𝑥 − 16) .
(48)
When 𝑡 = 0.5 and 𝑡 = 1, exact solutions of (47) are shown in
Figures 2 and 3. Specific forms of 𝑐0 , 𝑐𝑙 , 𝑐𝑟 , 𝑞, and 𝑓 are derived
by exact solutions.
From Figures 2 and 3, we can see exact solutions of
(47) possess highly localized properties in [0.2, 1]2 . First,
Ω is discretized using a regular grid. Let the space-step
ℎ = 1/160 and the time-step 𝜏0 = ℎ. Then choose the
subregion Ω1 = [0, 1.3]2 , which is refined in time. Let the
discretization parameters 𝜏 = 𝜏0 /𝑚 in the refined region
Ω1 , where 𝑚 is a positive integer. We denote by 𝐶 the
Example 5. Let 𝐷(𝑥) = 𝑥. Choosing 𝑚 = 1, 2, 4, 8, computational results obtained by (23) are shown in Table 2.
From Figures 4 and 5 and Tables 1 and 2, we can see
that numerical results produced by using the local refinement
technique are more accurate than those produced without
refinement. From Tables 1 and 2, we observe a monotonic
improvement of the accuracy in maximum norm when
using difference refinement factors 𝑚. These results are of
great importance for the research on numerical simulation
of the fluid flow problem and also indicate that the method
8
Abstract and Applied Analysis
0.04
0.035
0.03
0.025
0.02
𝑚=1
0.015
0.01
𝑚=2
0.005
0
𝑚=4
𝑚=8
0
0.5
1
1.5
2
Figure 4: Error |𝑐 − 𝐶| when 𝑡 = 0.5.
0.04
𝑚=1
0.035
0.03
0.025
0.02
𝑚=2
0.015
0.01
𝑚=4
0.005
0
𝑚=8
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
Figure 5: Error |𝑐 − 𝐶| when 𝑡 = 1.
proposed in this paper can be widely applied to some
application fields, such as energy numerical simulation and
environmental science.
Acknowledgments
The author thanks Professor Yirang Yuan for his valuable constructive suggestions which lead to a significant improvement
of this paper. This work is supported in part by the National
Natural Science Foundation of China (Grant no. 71071088)
and the Natural Science Foundation of Shandong Province of
China (Grant no. ZR2011AQ021).
References
[1] Y. R. Yuan, “Some new progress in the fileds of computational
petroleum geology and others,” Chinese Journal of Computational Physics, vol. 20, no. 4, pp. 283–290, 2003.
[2] R. E. Ewing, R. D. Lazarov, and P. S. Vassilevski, “Local
refinement techniques for elliptic problems on cell-centered
grids. I. Error analysis,” Mathematics of Computation, vol. 56,
no. 194, pp. 437–461, 1991.
[3] Z. Q. Cai, J. Mandel, and S. F. McCormick, “The finite volume
element method for diffusion equations on general triangulations,” SIAM Journal on Numerical Analysis, vol. 28, no. 2, pp.
392–402, 1991.
[4] Z. Q. Cai and S. F. McCormick, “On the accuracy of the finite
volume element method for diffusion equations on composite
grids,” SIAM Journal on Numerical Analysis, vol. 27, no. 3, pp.
636–655, 1990.
[5] R. E. Ewing, R. D. Lazarov, and P. S. Vassilevski, “Finite
difference schemes on grids with local refinement in time and
space for parabolic problems. I. Derivation, stability, and error
analysis,” Computing, vol. 45, no. 3, pp. 193–215, 1990.
[6] R. E. Ewing, R. D. Lazarov, and A. T. Vassilev, “Finite difference
scheme for parabolic problems on composite grids with refinement in time and space,” SIAM Journal on Numerical Analysis,
vol. 31, no. 6, pp. 1605–1622, 1994.
[7] W. Liu and Y. R. Yuan, “Finite difference schemes for twodimensional miscible displacement flow in porous media on
composite triangular grids,” Computers & Mathematics with
Applications, vol. 55, no. 3, pp. 470–484, 2008.
[8] W. Liu and Y. R. Yuan, “A finite difference scheme for twodimensional semiconductor device of heat conduction on composite triangular grids,” Applied Mathematics and Computation,
vol. 218, no. 11, pp. 6458–6468, 2012.
[9] J. Douglas, Jr. and J. E. Roberts, “Numerical methods for
a model for compressible miscible displacement in porous
media,” Mathematics of Computation, vol. 41, no. 164, pp. 441–
459, 1983.
[10] R. Yi Yuan, “Time stepping along charcteristics for the finite
element approximation of compressible miscible displacement
in porous media,” Mathematica Numerica Sinica, vol. 14, no. 4,
pp. 385–406, 1992.
[11] J. M. Yang and Y. P. Chen, “A priori error analysis of a discontinuous Galerkin approximation for a kind of compressible
miscible displacement problems,” Science China, Mathematics,
vol. 53, no. 10, pp. 2679–2696, 2010.
Advances in
Operations Research
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Advances in
Decision Sciences
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Mathematical Problems
in Engineering
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Journal of
Algebra
Hindawi Publishing Corporation
http://www.hindawi.com
Probability and Statistics
Volume 2014
The Scientific
World Journal
Hindawi Publishing Corporation
http://www.hindawi.com
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
International Journal of
Differential Equations
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Volume 2014
Submit your manuscripts at
http://www.hindawi.com
International Journal of
Advances in
Combinatorics
Hindawi Publishing Corporation
http://www.hindawi.com
Mathematical Physics
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Journal of
Complex Analysis
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
International
Journal of
Mathematics and
Mathematical
Sciences
Journal of
Hindawi Publishing Corporation
http://www.hindawi.com
Stochastic Analysis
Abstract and
Applied Analysis
Hindawi Publishing Corporation
http://www.hindawi.com
Hindawi Publishing Corporation
http://www.hindawi.com
International Journal of
Mathematics
Volume 2014
Volume 2014
Discrete Dynamics in
Nature and Society
Volume 2014
Volume 2014
Journal of
Journal of
Discrete Mathematics
Journal of
Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com
Applied Mathematics
Journal of
Function Spaces
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Optimization
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014