Experimental Study of the HUM Control Operator for Linear Waves Gilles Lebeau Ma¨
advertisement

Experimental Study of the HUM Control
Operator for Linear Waves
Gilles Lebeau1
1 Université
Maëlle Nodet2
de Nice, Institut Universitaire de France
2 Université
de Grenoble, INRIA
Orléans, juin 2009
Experimental study of HUM for waves
Outline
1
HUM control operator
2
Numerical method
3
Experimental study of HUM operator properties
Convergence rate
Frequency localization
Space localization
Condition number
Non controlling domains
Lebeau, Nodet
2 / 36
Experimental study of HUM for waves
HUM control operator
Outline
1
HUM control operator
2
Numerical method
3
Experimental study of HUM operator properties
Convergence rate
Frequency localization
Space localization
Condition number
Non controlling domains
Lebeau, Nodet
3 / 36
Experimental study of HUM for waves
HUM control operator
Lebeau, Nodet
Controllability of linear waves
For a given f = (u0 , u1 ) ∈ H01 (Ω) × L2 (Ω), the problem is to find
a source v (t, x)∈ L2 (0, T ; L2 (Ω)) such that the solution
u = S(v ) of the linear wave equation
2
(∂tt − ∆)u = χv in ]0, +∞[×Ω
u
= 0, t > 0
(1)
|∂Ω
(u|t=0 , ∂u|t=0 ) = (0, 0)
reaches the state f = (u0 , u1 ) = (u(T , .), ∂t u(T , .)) at time T ,
where:
Ω is a bounded open subset of Rd ,
the “control domain” U is a non empty open subset of Ω,
χ(t, x) = ψ(t)χ0 (x) where χ0 is a real L∞ function on Ω,
such that support(χ0 ) = U and χ0 (x) is continuous and
positive for x ∈ U, ψ ∈ C ∞ ([0, T ]) and ψ(t) > 0 on ]0, T [.
4 / 36
Experimental study of HUM for waves
HUM control operator
Lebeau, Nodet
Controllability of linear waves
The reachable set at time T is the subspace of
H = H01 (Ω) × L2 (Ω):
RT = {f = (u0 , u1 ) ∈ H, ∃v , (S(v )(T , .), ∂t S(v )(T , .)) = (u0 , u1 )}
Approximate controllability: RT is dense in H.
Exact controllability: RT = H.
5 / 36
Experimental study of HUM for waves
HUM control operator
Lebeau, Nodet
The HUM method
The Hilbert Uniqueness Method (HUM) [Lions 1988] consists in
choosing the function v with L2 -minimal norm. Then v is
necessarily of the form χ∂t w where w is a solution of the dual
control problem:
2
(∂tt − ∆)w = 0 in ]0, +∞[×Ω
w
= 0, t > 0
|∂Ω
(w |t=T , ∂t w |t=T ) = (w0 , w1 ) = h ∈ H = H01 (Ω) × L2 (Ω)
The HUM control operator is then defined by
Λ:
H → H
data f = (u0 , u1 ) 7→ control h = (w0 , w1 )
6 / 36
Experimental study of HUM for waves
HUM control operator
Lebeau, Nodet
HUM optimal control operator
Let A = A∗ be the operator on H = H01 (Ω) × L2 (Ω) defined by
0 Id
iA =
∆ 0
√
Let λ = −∆D . Then (1) becomes (∂t − iA)u = B(t)g with
0
0
0 λ−1 χ(t, .)
∗
B(t) =
, B (t) =
χ(t, .)λ 0
0
0
and g = (λ−1 v , 0). Then we have exact controlability iff
Z T
∗
∃C > 0, MT =
eitA B(T − t)B ∗ (T − t)e −itA dt ≥ C Id
0
And in that case we have
Λ = MT−1
7 / 36
Experimental study of HUM for waves
HUM control operator
Lebeau, Nodet
Geometric control condition
We recall that the source v in (1) is multiplied by χ(t, x) =
ψ(t)χ0 (x), where χ0 ∈ L∞ (Ω), such that support(χ0 ) = U and
χ0 (x) is continuous and positive for x ∈ U, ψ ∈ C ∞ ([0, T ]) and
ψ(t) > 0 on ]0, T [. We also assume that there is no contact of
infinite order between ∂Ω and the optical rays of the wave operator
in the free space. Let us recall the Geometric Control Condition of
C. Bardos, G. Lebeau and J. Rauch:
GCC
Every geodesic ray of Ω traveling with speed 1 and starting at
t = 0 enters the open set U = {x ∈ Ω, χ0 (x) 6= 0} in time t < T .
Theorem
If χ and T are such that the GCC condition holds true, then MT
is an isomorphism, i.e. one has exact controlability (RT = H).
8 / 36
Experimental study of HUM for waves
Numerical method
Outline
1
HUM control operator
2
Numerical method
3
Experimental study of HUM operator properties
Convergence rate
Frequency localization
Space localization
Condition number
Non controlling domains
Lebeau, Nodet
9 / 36
Experimental study of HUM for waves
Numerical method
Lebeau, Nodet
Previous numerical approach
Idea: [R. Glowinski et al.] first discretize the continuous wave
equation, then compute the control of the discrete system.
Major drawback: As observed by R. Glowinski et al. and precisely
studied by E. Zuazua, the discrete model is not uniformly exactly
controllable when the mesh size goes to zero, and the interaction
of waves with the numerical mesh produces spurious high
frequency oscillations.
In other words, the processes of numerical discretization and
control do not commute for the wave equation.
10 / 36
Experimental study of HUM for waves
Numerical method
Lebeau, Nodet
Spectral Galerkin method
Let (ωj2 ) be the sequence of −∆D eigenvalues, and (ej ) the
associated orthonormal basis of L2 (Ω):
−∆ej = ωj2 ej , ej |∂Ω = 0
For a given cutoff frequency ω, we define
L2ω = Span{ej , ωj ≤ ω}
and we denote by Πω the orthogonal projector on L2ω , which
obviously acts also on H = H01 × L2 :
Hω = Πω (H01 × L2 )
and we define the matrix MT ,ω :
MT ,ω = Πω MT Πω
MT ,ω,n,m = (MT φn |φm )H
where (φn ) is an orthonormal basis of Hω .
11 / 36
Experimental study of HUM for waves
Numerical method
Lebeau, Nodet
Spectral Galerkin method
Let us recall that Λ = MT−1 and MT ,ω = Πω MT Πω .
Then we have:
MT ,ω is invertible on Hω (always true)
kMT−1,ω k is bounded uniformly in ω (because of exact
controlability)
Lemma
Assume GCC. Then there exists c > 0 such that for all f ∈ H:
kΛ(f ) − MT−1,ω (fω )kH ≤ ckf − fω kH + kΛ(fω ) − MT−1,ω (fω )kH
with fω = Πω f and limω→∞ kΛ(fω ) − MT−1,ω (fω )kH = 0.
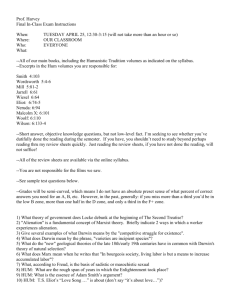
In other words, the processes of Galerkin approximation and
inversion “almost” commute for MT .
12 / 36
Experimental study of HUM for waves
Numerical method
Lebeau, Nodet
Comparison between ((MT )−1 )ω and ((MT )ω )−1
log abs (trunc(inv JMJ) − inv(trunc JMJ))
−5
100
−10
200
−15
300
−20
400
−25
500
−30
600
−35
700
−40
800
−45
900
−50
1000
100
200
300
400
500
600
700
800
900
1000
13 / 36
Experimental study of HUM for waves
Numerical method
Lebeau, Nodet
Computation of MT ,ω
Z
MT =
T
∗
eitA B(T − t)B ∗ (T − t)e −itA dt
0
Computation of the eigenvectors (ej ) of −∆ in Ω
Computation of MT ,ω,m,n :
MT ,ω,m,n = (MT φn |φm )H = Dn,m (T , ψ, Ω)Gn,m (χ0 , Ω)
Dn,m is a time integral
Gn,m is a space integral:
Z
Gn,m =
χ0 (x)2 φn (x)φm (x) dx
Ω
Inversion of MT ,ω
OFFLINE: for each Ω and χ0 (x): eigenvectors, G matrix
ONLINE: for various T and data f = (u0 , u1 ), computation of Λ(f )
14 / 36
Experimental study of HUM for waves
Numerical method
Lebeau, Nodet
Geometries, control domains and smoothing
Three geometries: square, disc and general domain
For each geometry, one “standard” control domain satisfying GCC
Two cases:
non-smooth control: χ(t, x) = 1[0,T ] 1U
smooth control: χ(t, x) = ψ(t)χ0 (x) with
−t)
ψ(t) = 4t(T
1[0,T ] and χ0 (x) similarly smoothed
T2
control domain
smooth control domain
control domain
smooth control domain
control domain
smooth control domain
15 / 36
Experimental study of HUM for waves
Numerical method
Lebeau, Nodet
16 / 36
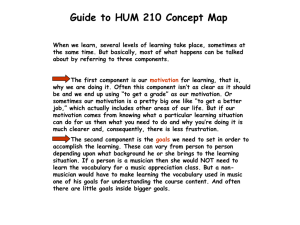
Impact of smoothing on MT ,ω
Smooth control
Non-smooth control
log J*M*inv(J)
log J*M*inv(J)
0
−5
500
−5
500
−10
1000
−10
1000
−15
1500
−15
1500
−20
−20
2000
2000
−25
−25
2500
2500
−30
−30
3000
−35
−40
3500
4000
−45
500
1000
1500
2000
2500
3000
(same color scaling)
3500
4000
3000
−35
−40
3500
−45
4000
500
1000
1500
2000
2500
3000
3500
4000
Experimental study of HUM for waves
Experimental study of HUM operator properties
Outline
1
HUM control operator
2
Numerical method
3
Experimental study of HUM operator properties
Convergence rate
Frequency localization
Space localization
Condition number
Non controlling domains
Lebeau, Nodet
17 / 36
Experimental study of HUM for waves
Experimental study of HUM operator properties
Convergence rate
Outline
1
HUM control operator
2
Numerical method
3
Experimental study of HUM operator properties
Convergence rate
Frequency localization
Space localization
Condition number
Non controlling domains
Lebeau, Nodet
18 / 36
Experimental study of HUM for waves
Experimental study of HUM operator properties
Convergence rate
Lebeau, Nodet
Theoretical results
Convergence lemma: with ω0 ≤ ω and fω0 ,ω = (Πω − Πω0 )f we
have
kΛ(fω ) − MT−1,ω (fω )kH ≤ (1 + ckMT k) (rΛ (ω, ω0 )kf kH + ckfω0 ,ω kH )
where the rate of convergence rΛ (ω, ω0 ) defined by:
rΛ (ω, ω0 ) = kΠ⊥
ω ΛΠω0 kH
satisfies the following lemma:
Lemma
Assume GCC holds true and χ is smooth. Then there exists g
with rapid decay such that:
ω
rΛ (ω, ω0 ) ≤ g
ω0
19 / 36
Experimental study of HUM for waves
Experimental study of HUM operator properties
Convergence rate
Lebeau, Nodet
Convergence rate: reconstruction errors
FINITE DIFF: Reconstruction error as a function of the cutoff frequency
0
square ; no smoothing
square ; smoothing
trapezoid ; no smoothing
trapezoid ; smoothing
−1
Reconstruction error in % (log10 scale)
−2
−3
−4
−5
−6
−7
−0.5
0
0.5
1
Cutoff frequency (log10 scale)
1.5
2
20 / 36
Experimental study of HUM for waves
Experimental study of HUM operator properties
Frequency localization
Outline
1
HUM control operator
2
Numerical method
3
Experimental study of HUM operator properties
Convergence rate
Frequency localization
Space localization
Condition number
Non controlling domains
Lebeau, Nodet
21 / 36
Experimental study of HUM for waves
Experimental study of HUM operator properties
Frequency localization
Lebeau, Nodet
Theoretical results
Let ψk (D), k ∈ N, be the spectral localization operators associated
to the Littlewood-Paley decomposition:
X
X
ψk (D)(
aj ej ) =
ψk (ωj )aj ej ,
j
j
Sk (D) =
k
X
ψj (D), k ≥ 0
j=0
Theorem (Dehman-Lebeau)
Assume that the geometric control condition GCC holds true, and
that the control function χ(t, x) is smooth. There exists C > 0
such that for every k ∈ N, the following inequality holds true
kψk (D)Λ − Λψk (D)kH ≤ C 2−k
kSk (D)Λ − ΛSk (D)kH ≤ C 2−k
22 / 36
Experimental study of HUM for waves
Experimental study of HUM operator properties
Frequency localization
Lebeau, Nodet
23 / 36
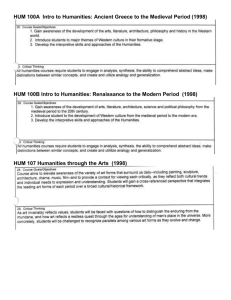
Frequency localization in the square
Data
Non smooth control
Spectral coeffs of the data
20
15
10
5
Control, with smoothing
140
70
120
60
absolute value of the spectral coefficient
absolute value of the spectral coefficient
absolute value of the spectral coefficient
25
0
100
80
60
40
20
0
20
40
frequency
Smooth control
Control, no smoothing
30
60
0
50
40
30
20
10
0
20
40
frequency
60
0
0
20
40
frequency
60
Experimental study of HUM for waves
Experimental study of HUM operator properties
Space localization
Outline
1
HUM control operator
2
Numerical method
3
Experimental study of HUM operator properties
Convergence rate
Frequency localization
Space localization
Condition number
Non controlling domains
Lebeau, Nodet
24 / 36
Experimental study of HUM for waves
Experimental study of HUM operator properties
Space localization
Space localization in the square
Lebeau, Nodet
25 / 36
Experimental study of HUM for waves
Experimental study of HUM operator properties
Space localization
Space localization in the disc
Lebeau, Nodet
26 / 36
Experimental study of HUM for waves
Experimental study of HUM operator properties
Space localization
Lebeau, Nodet
Box experiment in the square, no smoothing
27 / 36
Experimental study of HUM for waves
Experimental study of HUM operator properties
Space localization
Lebeau, Nodet
Box experiment in the square, with smoothing
28 / 36
Experimental study of HUM for waves
Experimental study of HUM operator properties
Space localization
Lebeau, Nodet
Theoretical results
Our experiments suggest that Λ preserves both space and frequency
localization, so that the following conjecture may hold true:
Conjecture
Assume that the geometric control condition GCC holds true, that
the control function χ(t, x) is smooth, and that the optical rays
have no infinite order of contact with the boundary. Then Λ is a
microlocal operator.
29 / 36
Experimental study of HUM for waves
Experimental study of HUM operator properties
Condition number
Outline
1
HUM control operator
2
Numerical method
3
Experimental study of HUM operator properties
Convergence rate
Frequency localization
Space localization
Condition number
Non controlling domains
Lebeau, Nodet
30 / 36
Experimental study of HUM for waves
Experimental study of HUM operator properties
Condition number
Lebeau, Nodet
Condition number of MT ,ω as a function of ω
Condition number of HUM matrix as a function of the cutoff frequency
1.5
1.6
1.7
1.8
1.9
2
2.1
2.2
2.3
2.4
2.5
2.6
40
Condition number of MT (log scale)
35
30
25
20
15
10
5
60
80
100
120
140
Cutoff frequency
160
180
200
220
31 / 36
Experimental study of HUM for waves
Experimental study of HUM operator properties
Condition number
Lebeau, Nodet
Theoretical results
Our experiments lead us to think that the following conjecture may
be true for a “generic” choice of the control function χ(t, x):
Conjecture
There exists C (T , U) such that
lim
ω→∞
log kMT−1,ω kH
ω
with
C (T , U) = 0 for T ≥ TGCC
C (T , U) > 0 for T < TGCC
= C (T , U)
32 / 36
Experimental study of HUM for waves
Experimental study of HUM operator properties
Non controlling domains
Outline
1
HUM control operator
2
Numerical method
3
Experimental study of HUM operator properties
Convergence rate
Frequency localization
Space localization
Condition number
Non controlling domains
Lebeau, Nodet
33 / 36
Experimental study of HUM for waves
Experimental study of HUM operator properties
Non controlling domains
Lebeau, Nodet
34 / 36
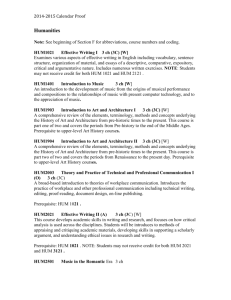
Non-controlling domains and special eigenvectors
500
500
500
500
450
450
450
450
400
400
400
400
350
350
350
350
300
300
300
300
250
250
250
250
200
200
200
200
150
150
150
150
100
100
100
100
50
50
50
100
200
300
400
500
100
200
300
400
50
500
100
200
300
Eigenvector 53
400
500
100
200
300
400
Eigenvector 60
500
2.5
500
4
450
2
450
3
400
1.5
400
350
1
350
0.5
300
0
250
−0.5
200
−1
150
2
1
300
0
250
−1
200
150
−2
100
−3
−1.5
100
−2
50
50
−4
−2.5
100
200
300
400
500
100
200
300
400
500
500
Experimental study of HUM for waves
Experimental study of HUM operator properties
Non controlling domains
Lebeau, Nodet
Influence of the choice of the data
Experiments with the first non-controlling domain U (radius
truncated around the boundary), and two different data to be
reached.
On the left, the 53rd eigenmode is localized around the boundary
of the circle, as is the control domain. On the right, the 60th
eigenmode is localized around the center of the circle.
smooth?
no
yes
Condition
number
4960
6042
53rd Eigenmode
Error (%) kw k
0.63
15
0.00065
24
60th Eigenmode
Error (%) kw k
26
4583
0.11
8872
35 / 36
Experimental study of HUM for waves
Experimental study of HUM operator properties
Non controlling domains
Lebeau, Nodet
36 / 36
Influence of the choice of the domain
Experiments with the data u53 localized at the boundary of the disc
for two different non-controlling domains U, the first one being
localized around the boundary, the second one around the center.
smooth?
no
yes
Cond.
4960
6042
First domain
Error (%) kw k
0.63
15
0.00065
24
Second domain
Cond. Error (%)
kw k
6
3.6 10
68
1.9 104
5
3.3 10
0.0094
6.5 105
Experimental study of HUM for waves
Movie
Lebeau, Nodet
Time evolution of the reconstructed solution
37 / 37
Experimental study of HUM for waves
Errors
Lebeau, Nodet
38 / 42
Frequency loc: reconstruction error
Non smooth control
−3
2.5
Smooth control
−7
Spectral coeffs relative error U0
x 10
9
Spectral coeffs relative error U0
x 10
8
7
relative error
relative error
2
1.5
1
6
5
4
3
2
0.5
1
0
0
20
40
60
80
100
120
140
160
0
180
0
20
40
60
80
frequency
−3
2.5
−6
Spectral coeffs relative error U1
x 10
100
120
140
160
180
120
140
160
180
frequency
4.5
Spectral coeffs relative error U1
x 10
4
3.5
relative error
relative error
2
1.5
1
3
2.5
2
1.5
1
0.5
0.5
0
0
20
40
60
80
100
frequency
120
140
160
180
0
0
20
40
60
80
100
frequency
Experimental study of HUM for waves
Errors
Space loc: error in the square
Lebeau, Nodet
39 / 42
Experimental study of HUM for waves
Errors
Space loc: error in the disc
Lebeau, Nodet
40 / 42
Experimental study of HUM for waves
Errors
Error for the box experiment
Lebeau, Nodet
41 / 42
Experimental study of HUM for waves
Errors
Error for the rotated box experiment
Lebeau, Nodet
42 / 42