A Study of Contraction Theory and Oscillators
by
Caroline Combescot
Ingenieur de l'Ecole polytechnique - France (1998)
Submitted to the Department of Mechanical Engineering
in partial fulfillment of the requirements for the degree of
Master of Science in Mechanical Engineering
at the
MASSACHUSETTS INSTITUTE OF TECHNOLOGY
September 2000
Institute of Technology. All rights reserved.
© 2000 Massachusetts
MASSACHUSETTS
INSTITUTE
OF TECHNOLOGY
SEP 2 0 2OOp
A uthor ....
LIBRARIES ...........
I........
.........
Department of Mechanical Engineering
August 4, 2000
-m
Certified by......
/
. -. ..........
Jean-Jacques E. Slotine
Professor of Mechanical Engineering and Information Sciences
Professor of Brain and Cognitive Sciences
Thesis Supervisor
A ccepted by ...........................
Ain A. Sonin
Chairman, Department Committee on Graduate Students
A Study of Contraction Theory and Oscillators
by
Caroline Combescot
Submitted to the Department of Mechanical Engineering
on August 4, 2000, in partial fulfillment of the
requirements for the degree of
Master of Science in Mechanical Engineering
Abstract
Oscillators have been the subject of numerous studies recently, as they show a very
fascinating synchronizing behavior. But most of the results are relying on simulations
and very few theoretical results have been derived to show this behavior. Recently,
Jean-Jacques Slotine and Winfried Lohmiller developed in the Nonlinear Systems
Laboratory a new analysis of non linear systems, called Contraction Theory, which
studies the stability of a system with respect to a trajectory. This thesis uses this
new approach to study the behavior of classes of nonlinear systems defined by an
equation derived from the linearly damped oscillator. Theoretical proofs of some
synchronization behaviors can then be derived in a fairly simple manner compared to
what is done in the to date literature of the theory of oscillators.
Thesis Supervisor: Jean-Jacques E. Slotine
Title: Professor of Mechanical Engineering and Information Sciences; Professor of
Brain and Cognitive Sciences
3
Acknowledgments
I would like to thank very deeply all the people that enabled me to go through this
work: My advisor Jean-Jacques Slotine for providing support and leading me the
whole way in my research. My lab mates and friends Alex, Lutz, Martin, Winni,
Emilio, Jeff, Danielle, and last but not least Gilles, as well as my family, for being
there to discuss any kind of matter and help me keep the right direction.
This work was supported in part by grant NSF/KDI 6777400.
4
Contents
1
Introduction
2
Oscillators
2.1 Introduction . . . . . . . . . . . .
2.1.1 Biological motivation . . .
2.1.2 The van der Pol equation
2.2 Van der Pol synchronization . . .
11
11
11
11
12
3
Contraction Theory
3.1 Definition and Basic result
3.1.1 Contracting systems
3.1.2 Justification . . . . . . .
3.1.3 Remarks . . . . . . . . .
3.2 Advanced derivations . . . . . .
3.2.1 Generalization . . . . . .
3.2.2 Converse Theorem . . .
3.2.3 Weak contraction analysis
3.2.4 Feedback combination .
3.3 Insight . . . . . . . . . . . . . ..
3.3.1 Introduction . . . . . . .
3.3.2 Geometrical view . . . .
3.3.3 Deeper mathematical expl anation
3.4 An example . . . . . . . . . . ..
15
15
15
16
16
18
18
19
19
21
22
22
22
25
26
9
4 Mathematical proof of the contraction behavior
of interest
4.1 Introduction . . . . . . . . . . . . . . . . . . . .
4.1.1 Statement of the problem . . . . . . . .
4.1.2 Intuition . . . . . . . . . . . . . . . . . .
4.2 Demonstration . . . . . . . . . . . . . . . . . .
4.2.1 Integration . . . . . . . . . . . . . . . .
4.2.2 Choice of a convenient origin of time . .
4.2.3 Final step . . . . . . . . . . . . . . . . .
5
of a class of systems
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
29
29
29
30
31
31
31
32
4.3
4.4
4.5
G eneralization . . . .
4.3.1 C ase n = 2 .
4.3.2 General Case
Extension . . . . . .
4.4.1 R esult . . . .
4.4.2 P roof . . . . .
4.4.3 Simulation . .
H igher order . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
39
5 Studies of Contraction of systems requiring the use of a Metric
5.1
33
33
34
36
36
36
37
37
Contraction analysis of a class of system similar to chapter 4's . . . .
39
. .
. .
. .
. .
. .
. .
. .
to
39
42
43
48
48
49
50
a space of dimension (n - 1) . . . . . . . . . . . . . . . . . . . . . . .
52
5.3.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.3.2 Second order system . . . . . . . . . . . . . . . . . . . . . . .
5.3.3 n dimensional case . . . . . . . . . . . . . . . . . . . . . . . .
Study of exponential convergence for the system introduced in 4.1.1 .
5.4.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.4.2 Analytical Study . . . . . . . . . . . . . . . . . . . . . . . . .
5.4.3 Visualization and interest . . . . . . . . . . . . . . . . . . . .
Contraction study of the damped van der Pol using a change of variables
5.5.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.5.2 Change of variables . . . . . . . . . . . . . . . . . . . . . . . .
5.5.3 Contraction study . . . . . . . . . . . . . . . . . . . . . . . . .
Weak Contraction study of the damped van der Pol . . . . . . . . .
5.6.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.6.2 Weak contraction study . . . . . . . . . . . . . . . . . . . . .
5.6.3 Expression of the change of variables as a e matrix . . . . . .
52
52
54
55
55
56
57
59
59
59
60
63
63
63
65
6 Proved synchronization behaviors of combinations of van der Pol
oscillators
6.1 Synchronization of van der Pol oscillators . . . . . . . . . . . . . . . .
6.1.1 Tuning of two van der Pol oscillators . . . . . . . . . . . . . .
6.1.2 Synchronization of n + 1 van der Pol oscillators . . . . . . . .
6.2 Synchronization using an Observer . . . . . . . . . . . . . . . . . . .
67
67
67
69
69
5.2
5.3
5.4
5.5
5.6
5.1.1
5.1.2
5.1.3
Scalar
5.2.1
5.2.2
5.2.3
Study
Introduction . . . . . . . . . . .
Mathematical derivation . . . .
Interpretation . . . . . . . . . .
system . . . . . . . . . . . . . .
Introduction . . . . . . . . . . .
M etric search . . . . . . . . . .
Exam ple . . . . . . . . . . . . .
of convergence of the state space
6
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
of a n
. . . . . . .
. . . . . . .
. . . . . . .
. . . . . . .
. . . . . . .
. . . . . . .
. . . . . . .
dimensional
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
system
6.3
6.4
6.5
Operations with van der Pol oscillators . . . . . . . . . . .
6.3.1 Addition of two van der Pol oscillators . . . . . . .
6.3.2 Addition of n van der Pol oscillators . . . . . . . .
6.3.3 Multiplication by a constant . . . . . . . . . . . . .
Extensions . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.4.1 Van der Pol as a pendulum . . . . . . . . . . . . .
6.4.2 Tuning of a van der Pol to any trajectory . . . . . .
6.4.3 Generalization . . . . . . . . . . . . . . . . . . . . .
6.4.4 Application of contraction to general control design
Feedback Combination of two van der Pol oscillators . . .
7 Conclusion
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
70
70
71
72
73
73
73
76
76
77
81
7
8
Chapter 1
Introduction
Oscillators govern a lot of physiological and biological rhythmic motions, enabling
synchronization of periodic oscillations in a noisy and disturbed environment. Examples go from heartbeat in our body, to control of a humanoid arm, achieved by
Matthew Williamson recently at MIT. So far very few theoretical results on stability
of systems controlled by oscillators have been shown.
The approach used in Contraction Theory is aimed to derive results on the stability
of a system with respect to a trajectory, it does not depend on the particular time
dependent input that is governing the system. Therefore changing the time dependent
input function does not alter the stability result derived. Contraction Theory can thus
be used to get a better understanding of how systems remain stable with very few
requirements on the knowledge of the environment, which may be characterized as
no requirements on the input to the system.
This thesis uses such an approach to derive theoretical results on behaviors of
nonlinear systems derived from the damped pendulum, and then prove the synchronization of certain types of oscillatory systems. Chapter 2 gives a general view of
the motivation for studying oscillators. It ends by describing the synchronization
behavior that triggered the interest in the systems studied in this thesis. Chapter 3
introduces Contraction Theory. It derives some intuitive and geometric explanations
of the mathematics involved, and gives an example to get better hands on understanding of how this theory can be applied. Chapter 4 gives a mathematical demonstration
of the contraction behavior of a certain class of nonlinear system derived from the
damped pendulum. Chapter 5 derives different types of use of metrics to get contraction results on systems of interest. It ends up with a weak contraction study of the
damped van der Pol which gives us contraction for this system. Chapter 6 uses some
of the previously derived theoretical results to prove some synchronization behaviors
of interest. Finally, chapter 7 concludes on the work done.
9
10
Chapter 2
Oscillators
2.1
2.1.1
Introduction
Biological motivation
Oscillations are ubiquitous, in Mechanics as well as in Biology. In Biology almost all
vital functions include in some way oscillations. Locomotion, be it using legs, wings
or fins, is rhythmic. Other familiar examples include breathing and heartbeat. Our
sensory and nervous system depend on periodic oscillations to perform many of their
tasks.
In nature, coupled neurons constitute the basic oscillators. In a real biological
system, one will never encounter an oscillator alone, as its signal would be too weak
to provoke any motor or other behavior of interest to us. In animals, oscillators tend
to occur clustered and interconnected in so-called CentralPattern Generators (CPGs)
that oscillate in synchrony and thus produce output signals that are strong enough
to actually influence the targeted part of the nervous system or muscle. These seem
to be at the core of all biological rhythmic activity. Examples for Central Pattern
Generators are pacemaker cells in the heart, or groups of nerve cells in the spinal cord
that actuate legs in a rhythmic fashion.
2.1.2
The van der Pol equation
To simulate coupled neurons a wide variety of models have been derived. One of the
most important equation among those is the van der Pol equation. This equation was
discovered by van der Pol while studying the "tetrode multivibrator" circuit used in
early radios. This circuit connects in parallel a magnetic coil and a capacitor, between
which the energy swings periodically back and forth, as well as a non-linear resistor.
The latter acts like an ordinary resistor for high voltages but for voltages below a
specific threshold, it reverses its behavior and the resistance becomes negative. This
can for example be realized by a twin-tunnel-diode circuit. This means that for high
11
voltages the system is damped down, whereas for low values, additional energy is
injected. Intuitively this should lead to a sustained oscillation at some intermediate
voltage.
For a general non-linear resistor with the voltage-controlled i - v characteristic
i = F(v), Kirchhoff's current laws yield the circuit equation
+ av F(v) + v = 0.
When F(v) = -v + !i3 the equation takes on the form
1 + a,(v 2
-
1) + v = 0
which is known as the van der Pol (vdP) equation.
A more general form of the van der Pol equation can be written as follows
+
2-
1)i
+
2X
= 0
Here w represents the natural frequency of the oscillation and a is a parameter whose
size has a very strong influence on the dynamics of the system.
The van der Pol equation has a stable limit cycle, whose existence can be proven
for a > 0 using the Poincare-Bendixson theorem. It can also be shown that the limit
0, the unstable
cycle is the unique solution aside from the trivial solution x
origin [3].
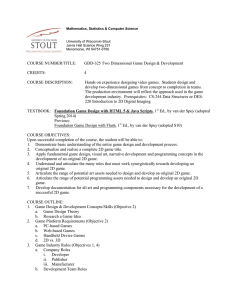
For small a the limit cycle in the (x, ±) plane looks like a circle with radius 2.
For larger a the limit cycle is heavily distorted as the effect of the damping is more
pronounced, thus its effects can be more easily observed. For JxJ > 1 the damping
is positive and large, and every increase in iJJis heavily penalized. At JxJ = 1 the
damping changes its sign and turns into a forcing, thus accelerating the system for
all JxJ < 1. This behavior can be seen on figure (2-1).
2.2
Van der Pol synchronization
There is a wide variety of synchronization behaviors of oscillators. One that kept our
attention is the following:
If a given van der Pol oscillator (1) is controlled by the difference of velocity
between his velocity and the one of another identical van der Pol (2), vdP(1) will end
up following the exact same trajectory as vdP(2).
This can be mathematically expressed by:
zi + a(Xz - 1)i + w 2 x1 = ak(±2 - XI) with any (xi(0), Ji(0)) given
with x 2 verifying i 2 + a(xj - )d2 + W2 x 2 = 0 and any (x 2 (0), ±2(0)) given
12
15
5
4
10
3
5
2
1
0
+--
0
-1
-5
-2
-10
-3
-4
-15
-5
-2
-1
0
1
2
-20
-4
3
-2
0
x
2
4
Figure 2-1: Limit cycle of the van der Pol equation with w = 1, for a = 0.1 on the
left, and a = 10 on the right. The plain and dotted lines correspond to different sets
of initial conditions.
13
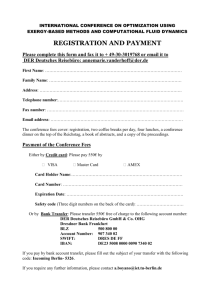
leads to x, converges to x 2 . In other words, x1 and x 2 will end up on the same point of
the limit cycle of the van der Pol. We thus end up with two exactly identical systems,
oscillating at the same frequency, whatever initial conditions of the two systems.
Figure (2-2) shows examples of such a behavior.
4
4
2
2
/V
0
X
-2
-4
0
10
20
40
30
0
10
30
40
20
time
30
40
20
30
40
20
time
time
5
2
0
V.
0
_0
C\J
X
C\1
-5
-10
0
-2
0
10
20
30
-4
40
0
10
0
10
time
10
5
5
0
C',J
X
0
0
*0
-101
0
10
20
30
-5
-10'
40
time
time
Figure 2-2: Convergence of vdP(1) to vdP(2). (a = 1, w = 1, k = 2)
Looking at the equations, we remark that the system actually converges to what
an obvious particular solution is. Thus, to prove this synchronization in a rigorous
manner, we need to show that the system will converge to a unique trajectory whatever initial conditions it starts with. Indeed, in such a case, as there is one trajectory
which is obvious if the system starts with the right initial conditions, we can conclude
that the system will always converge to this trajectory.
This is exactly the kind of results that Contraction Theory enables to prove. We
therefore introduce this new theory in the next chapter, before we use it to study
the contraction behavior of a variety of systems in the following two chapters. These
results enable us to go back to this synchronization behavior in chapter 6, and prove
it, as well as derive proofs for other types of synchronization.
14
Chapter 3
Contraction Theory
This chapter exposes the main concepts of Contraction Theory [8], and tries to give
insight in the mathematical formulae, by detailing the geometrical point of view, and
giving an example of use.
3.1
Definition and Basic result
Intuitively, contraction analysis is based on a slightly different view of what stability
is. Regardless of the exact technical form in which it is defined, stability is generally
viewed relative to some nominal motion or equilibrium. Contraction analysis is motivated by the elementary remark that talking about stability does not require one to
know what the nominal motion is.
3.1.1
Contracting systems
Let us consider a system in the form
f(x, t)
(3.1)
where f is a n x 1 vector function, continuously differentiable, and x is the n x 1 state
vector.
We define the Jacobian matrix J(x, t)
The main result of Contraction Theory is that in a region where the symmetric part of the Jacobian matrix is negative definite, the system converges
exponentially to a single trajectory, which does not depend on the initial
conditions of the system within this region. The system is then called a
contracting system in that region.
15
In particular, Contraction Theory enables to prove that the system will follow a
particular obvious trajectory if such a trajectory exists.
3.1.2
Justification
The proof of this result is the following. The virtual displacement 6x is an infinitesimal displacement at fixed time, thus 6xT6x characterizes the distance between two
neighboring trajectories. The dynamic of the virtual displacement is obtained by
differentiating (3.1):
(3.2)
6,+ = J(X, t) 6X
which leads us to the dynamic of the distance between two neighboring trajectories:
d
dtd-(6xT6x)
=
6T6x
+ xT5& =2 6xT(
J+± T
2 jx
Defining A)max(x, t) the largest eigenvalue of the symmetric part of J, we can write
dt+(6xT6x)
< 2Amax6x T6X
Defining the norm 116xll = V/6x 6x, we get
{
d (1k6X
{16X|2
d
2)
< 2Amax I
)
)<
2Amax(X, t)}
which integrates in
In( 11n11X1O1 2 ) 2<- 2 f jt Amax (X
t) dt #
||6X|| < 116xoI| efotA"(xt)dt
The symmetric part of the Jacobian being negative definite, we have 3 / >
0 such that Vx, V t, Amax(X, t) < -0 < 0, i.e. Amax(X, t) is uniformly strictly negative. Thus we have
|6x|
||x6 0| e--t
and 116xll converges to 0 exponentially.
3.1.3
Remarks
An important point is that one has to guarantee that a trajectory stays in the contracting region of the system, to be able to say that this trajectory is going to converge
to the single trajectory of that region. Indeed, the contracting behavior of a system
16
within a certain region, does not guarantee that any trajectory, starting in that region, will remain in the region. And thus this has to be shown.
Something that should be pointed out too is the strength of the Contraction
property. Indeed, if a system i
f(x, t) is contracting in a certain region, then for
any function of time u(t), the system i = f(x, t) + u(t) is also contracting. So two
things should always be kept in mind:
* If a system might intuitively have a contraction behavior with no input, one
should always be careful to try to apprehend how would the system behave with
some type of time dependent input, which could alter the contracting behavior
intuition. As an example, let us consider a system which, with no input, has a
stable equilibrium point. Thus this system, with no input, converges to a single
trajectory -which in this case is a point- independent of the initial conditions.
It is easy to understand that this does not imply, in the general case, that this
system is going to converge to a single trajectory when the system is input a
time dependent function u(t). This highlights the fact that Contraction is a
notion different from Stability -as a matter of fact, a contracting system can
very well follow a diverging (non stable) trajectory.
* And on the other hand, if a system, already when there is no input, has obviously
a behavior (trajectory) which depends on the initial conditions, it is for sure
not contracting. An example is the linear pendulum with no damping. The
easy study of this system with no input, shows that the trajectory followed is
totally dependent on the initial conditions. This should again give a feeling that
Contraction is a particular property, that might not be satisfied even for very
simple systems.
The last important remark is that, with the use of a differential approach, convergence
analysis and limit behavior are in a sense treated separately. Guaranteeing contraction
means that after exponential transients, the system's behavior will be independent of
the initial conditions.
In an observer context, one then needs only to verify that the observer equations
contain the actual plant state as a particular solution, to automatically guarantee convergence to that state. In a control context, once contraction is guaranteed through
feedback, specifying the final behavior reduces to the problem of shaping one particular solution, i.e., specifying an adequate open-loop control input to be added to the
feedback terms, a necessary step of any control method.
17
3.2
3.2.1
Advanced derivations
Generalization
The result stated in the previous section can be extended by using a more general
definition of distance between two trajectories.
This is done by defining a differential change of base
6Z = 196x
where e(x, t) is a square invertible matrix. By differentiating such an expression we
get:
6i = 66x +
&x =_(6 + EJ)E)--6z = Fz
(3.3)
This equation has the same form as (3.2). Thus, with the same reasoning as in
the previous section, we have the following result:
If the generalized Jacobian F = (E+EJ)E- 1 is uniformly negative definite in a certain region, 116zlI, and thus ||6xfl, converges exponentially to 0 in
that region, and thus the system converges exponentially to a single trajectory, regardless of the initial conditions within this region.
We can get an equivalent result by defining M = E8T. The metric M(x, t) is a
symmetric positive definite matrix representing the change of base from the distance
point of view. We shall assume M to be uniformly positive definite, so that the
exponential convergence of 6z to 0 also implies exponential convergence of 6x to 0.
In addition we assume M to be initially bounded, so that an initially bounded virtual
displacement 6x leads to an initially bounded squared infinitesimal length 6xTM6x.
We have
|16z||2
=
zTz -- 6xTE)T6X - 6XTM6X
and
dtd(xTMx) = 6xT(JTM + M- + MJ)x
Thus, if - 33 > 0 such that (JTM + Al + MJ) < -#M, then
nentially to 0, so does 116xl , and we get the same result.
18
(3.4)
|16zfl
converges expo-
3.2.2
Converse Theorem
The metric analysis exposed at the end of the previous section enables to get a
necessary and sufficient condition for a system to converge exponentially
to a trajectory.
Indeed, we already have a sufficient condition: the existence of a metric
M verifying (JTM + M + MJ) < -#M. Let us show that this condition is also a
necessary condition:
If a system converges exponentially to a trajectory, we have: 30 > 0 and Ek > 1,
such that the square distance between two neighboring trajectories
116x
|2
= 6xT6x
verifies
6xT6x
Defining a metric M(x(t), t) by M(t
< k 6xT6xoe-t
=
0)
(3.5)
kI and
M=-/3M-MJ-
JT M
(3.6)
we then have, using (3.4) and (3.6) for the equality, (the inequality is (3.5)),
6xTM6x
=
k 6xT6Xoe--t
>
6xT6x
(3.7)
Since this holds for any 6x, (3.7) shows that M > I and M is uniformly positive
definite. Thus the existence of such a metric is also a necessary condition
for a system to be exponentially convergent to a trajectory.
3.2.3
Weak contraction analysis
This analysis provides a way of studying contraction for semi-contracting systems.
A system is called semi-contracting if its (generalized) Jacobian is
negative semi-definite only.
Thus, a semi-contracting system
d
6z
dt
=
F 6z
is such that we have
d
dt-jazToz)
=
-26zTF soz
with positive semi-definite F, = -I(F + FT).
We are thus able to define
F8 which is such that F, =
19
FT F8 . Using the Lie
derivatives L)
F8 (x, t) defined as:
L0
d
/F
F) F + dt (L VF,)
F= VF and Lj+'F, = (Li
we can express the time derivatives of 6zU6z as:
d(6zT6Z) (6zT6Z) -
-2 6zT
(Lo
-2
(Li
L
z
FS)T (LO IF)
S)T
) 6L
T
(U0 IF8 ) + (U0 IF
8s)
(L2F))z
d(6ZT6Z)-
-2 JzT ((L2
Fs)T
(LO
/F8 )
T
F8 ) - (L0
+ 2 (LiV/F 8 ) (L1
F S )T (L2 rF8 ))
6
etc...
This enables to write the Taylor series expansion of 6zT6z(t + T), which is
6zT6z(t
+ T)
= 6zT6z(t)
T2 d2
+T d
(6ZT6Z (t)
+2!
(6T
Wt
Siz)t)
T
T2
T2
-
3! dt3
(6zT6z) (t)+
+ T) =
as 6z Tz(t
6zT6z
t
2
6zT
(
(L0 /FS) T
(L
/FS)T
--.
3!
2!
T3
(
3!
2T 3
3T4
3T 4
5
4T
4!
5!
VF8'
-F,
where all the terms on the right hand side are computed at time t.
For a given constant T > 0, the matrix of the previous expression, with the terms
, can be shown, by complete induction, to be uniformly
of the form k and
positive definite. In addition, we can factor T out of this matrix, thus there exists
# > 0 (for example the smallest eigenvalue of that matrix divided by T) such that
6zT6z(t
+ T)
< 6zT6z
- 2T
Now, if the matrix Tr,
/3
6zT
( (LO VFS)T
(L'
with
VF s
20
)
FS)T
...
VF 8s
F8 ~
6z
is uniformly positive definite, there exits y > 0 (again, for example the smallest
eigenvalue of FTr) such that
6z Tz(t
+ T)
< 6zT6z - 2 T
y ozT6z
6
which implies exponential convergence of ||azHI to zero.
An important point here is that, once fTf
is uniformly positive definite for a
finite number of Lie derivatives, the following ones do not influence the definiteness
of IT r anymore.
This study can be viewed as a generalization of the basic result of Contraction
Theory -which only consider the first time derivative. Here, the system being semicontracting, the first time derivative is not sufficient to determine contraction, and
we have to perform a Taylor expansion to analyze the contraction behavior which is
linked to higher order time derivatives.
We define a weak-contraction region as a semi-contraction region in
which the matrix ]T
is uniformly positive definite. Thus, we have obtained exponential convergence for weak contracting systems.
3.2.4
Feedback combination
Let us consider two contracting systems
x1 = fi (xi, t)
= f 2 (x 2 , t)
2
We know that there exists e 1 and 0 2 such that the respective generalized Jacobians
F 1 and F 2 are definite negative. The relations are:
i1 = F1 6z with 6z, =
6i2= F 2 6z
2
with 6z
2 =
E1 6x 1
0
2
6X2
If we consider the following feedback combination
d
dt
the Jacobian is
(
T
(
6z
_
-G
6Z2
{
F2,
F1
T
G
6z,
F2
Z2
GFI+FT
F
which symmetric part is
F2F
2
).
The
eigenvalues of this matrix are the ones of the two diagonal blocks, which are uniformly
negative, as F 1 and F 2 are definite negative. Thus the Jacobian of this feedback
combination is definite negative, and the resulting combined system (z 1 , z 2 ), as well
21
as the corresponding original one (x 1 , X 2 ) is contracting.
3.3
Insight
This section is aimed to gain more insight into what these mathematical formulae
and conditions mean.
3.3.1
Introduction
To do this we shall use some denominations common in fluid mechanics [2]. In
this field, the movement of a two dimensional infinitesimal material vector dM in a
velocity field U(x, t) is characterized by its derivative with respect to time:
dNI = gradU.dM
So here the similarity is clear, gradU is equivalent to our Jacobian J(x, t).
In fluid mechanics the skew-symmetric part of gradU(x, t) is called the rotation
rate and is denoted Q:
1
2
1
2
1
2
Q =-(gradU -t gradU) = -rotU = -w
with rotU = w representing the instantaneous rotation vector. And the symmetric
part is called the deformation rate:
d =
3.3.2
2
1
(gradU +t gradU)
( dil
d12
k\d
12
d12
d2
d22
N
,
Geometrical view
Figure (3-1) shows the specific action of those two matrices on a material vector.
The movement shown in (a) is the displacement of the material element as a whole
due to the velocity field (dynamics). The movement shown in (b) is the rotation of the
material element due to the instantaneous rotation induced by the skew-symmetric
part of gradU M J(x, t). The movements shown in (c) and (d) are induced by the
symmetric part of gradU # J(x, t). Drawing (c) shows the two lengthenings, one
in each direction, induced by each diagonal term of d. And drawing (d) shows the
shearing, induced by the non diagonal terms of d.
Those drawings enable also to see how the rate of variation of surfaces can be
computed, and extended to get the formula for the rate of variation of volumes for
the n-dimensional case. Indeed, we have 6S =6x1 6x 2 , so we see that 6S(t + 6t) =
[(1 + dtjt)6x1 (t)][(1 + d 2 2 6t)6x 2 (t)], which leads to (coherent with this first order
22
x2 f2
x2 f
dx2
wdt/2
Udt
dxI
(a)
X1
X1
(b)
x2 t
x2 t
d22dx2dt\
dl2dt
dlldxldt
(c)
XI
d12dt
(d)
XI
Figure 3-1: General movement of a material element (two dimensions) between t and
t + 6t. See text for more detailed explanation.
23
differential analysis) dS = (d11 + d22 )dS. Thus more generally we have
du
dQ
divU
=
Tr(d)
=
Tr(J(x, t))
(3.8)
which gives the following result: If the divergence of the velocity field is negative,
volumes decrease (known as the Gauss Theorem, a form of transport theorem). This
can be refined by saying that: in a region where the trace of the Jacobian is uniformly
definite negative, volumes that stay in that region, tend to 0. If we consider a system of
dimension n, this means that the state space converges to a space of dimension (n- 1).
We now can understand more intuitively why the skew-symmetric part of the
Jacobian does not play a role in the evolution of the distance between two neighboring
trajectories: it only corresponds to a rotation of one trajectory with respect to the
other, it does not affect the distance between the two trajectories. On the contrary,
both the diagonal and non diagonal terms of the symmetric part of the Jacobian
plays a role in the evolution of the distance between two points and their respective
trajectory.
Moreover, a symmetric real matrix is diagonalizable, which means that there exists a base (orthogonal) in which the matrix is diagonal, with its eigenvalues (real)
on the diagonal. Thus, if a symmetric matrix is negative definite, it means that
there exists a base in which its matrix is diagonal, with only negative terms on the
diagonal. Hence, in this base, there is no shearing, just negative lengthening on the
principal directions, so it is clear that distances shrink. Thus, intuitively, two neighboring trajectories converges. Indeed, in the general movement shown on figure (3-1),
any corner of the square can be viewed as a material point, and as in this case, the
surface of this square is going to 0, whatever couple of corners is representing the
two neighboring trajectories, they will converge to one another, leading to a single
trajectory.
We can remark here that when the state space is the (x, ±) phase plane, the
existence of a limit cycle implies that the system is not contracting. Indeed, in the
phase plane, a trajectory is, at each time, a point. So if the system is contracting,
it means that the state of the system will converge to a point in the phase plane
(point which is, in general, moving over time). The limit cycle is a space in the phase
plane, in which any point representing a trajectory of the system is going to end up
evolving. So it means that each trajectory ends up to follow the same pattern, but
spaced by a time interval depending on the initial conditions. So there is an infinity
of trajectories. This is for example the case of the van der Pol oscillator.
24
3.3.3
Deeper mathematical explanation
To understand intuitively the change of base/metric reasoning in contraction analysis,
we have to remember that a symmetric matrix is associated with an intrinsic quadratic
form that has intrinsic eigenvalues. A change of base for a quadratic form, and thus
for a symmetric matrix without changing its eigenvalues, is represented by a unitary
matrix P which verifies P-1 = PT. So a more general change of base, with just an
invertible matrix, like E, applied on a symmetric matrix, does change the quadratic
form associated with the matrix, and thus its eigenvalues.
This remark is fundamental to understand the manipulation done in section 3.2.1.
In fact, let us consider, to simplify, what happens if E, or equivalently M, is constant
(does not depend on time, nor on the state). The generalized Jacobian F = EJ (as e = 0) is just the matrix of the Jacobian expressed in the new base which is
defined, with respect to the canonical base, by E. Thus the eigenvalues of the generalized Jacobian are the same as the Jacobian ones, but here we are interested in the
eigenvalues of the symmetric part of the Jacobian, which is a quadratic form, that
is changed in general, as explained, if the change of base is not unitary. Thus the
manipulation done in section 3.2.1 indeed changes the eigenvalues of the symmetric
part of the Jacobian, enabling them to become negative as desired if possible.
Another remark is that the sum of the eigenvalues of the Jacobian is equal to the
sum of the eigenvalues of its symmetric part (the skew-symmetric part has its sum
of eigenvalues equal to zero). Thus the sum of the eigenvalues of the Jacobian in the
canonical base is equal to the sum of the eigenvalues of its symmetric part in any base
(as the change of base does not affect the eigenvalues of the Jacobian -the eigenvalues
are intrinsic, associated with the linear transformation that the matrix represents).
All these relations are written in the following expression (with A(A) denoting the
eigenvalues of the matrix A):
J+
JT
A(EJ
)
A(
J-
+ (JE-1)T
'The trace of a matrix is equal to the sum of its eigenvalues. So, if the trace of
the Jacobian in the canonical base is positive, there is no way that in another base,
defined by a constant change of base matrix E, all the eigenvalues of the symmetric
part of the Jacobian be negative. Thus, the system is not contracting with a constant
metric. Result which can be summed up in the following expression (which provides
'Let us recall at this point that the whole reasoning here applies for the case when E, or equivalently M, is constant (does not depend on time, nor on the state). This enables to get some intuition
on the meaning of the mathematical manipulations done. In the case E, or equivalently M, does
depend on time or the state, these explanations are not exactly true, but one should just feel that
it is a generalization of the constant case.
25
a necessary condition for a system to be contracting with a constant metric):
If Tr(J) > 0, the system is not contracting with a constant metric.
-but might be with a time/state dependent metric-[see footnote of the beginning of the
paragraph].
3.4
An example
As mentioned previously, the linear pendulum with no damping cannot be contracting, as its energy and trajectory is determined by the initial conditions. So we have to
introduce damping to try to get a simple example of a contracting system. Thus, let us
study the equation of the linearly damped oscillator with any kind of time-dependent
input u(t):
Y + kb + w2 x
u(t)
-
(3.9)
This will enable us to see how all the mathematics described in sections 3.1 and 3.2
can be used in practice.
Equation (3.9) can be put in the (3.1) form by the classic transformation of a
second order, one dimension equation, in a first order, two dimensions equation:
dt
)
-kz - W2 X + Uft)
The Jacobian is
1
(02
which symmetric part's eigenvalues are defined by the equation:
A(A + k)
-
(1 - w 2 )2
4
0
which gives:
-k±
k 2 + (1- w 2 )2
2
one of which is obviously positive.
So, if the system is contracting, we need to find the corresponding metric. We can
26
i the equation
bby solving
try to find a constant metric M=jm
M12
(
-1
0
JTM+MJ=
(the instead of -1 is there to keep coherent units). Here we know that the matrix
M resulting is going to be positive definite, as this is a formulation of the Lyapunov
matrix equation [14], and the system i = J x is stable. Thus we know that M will
actually be a metric satisfying the conditions for the system to be contracting.
We obtain, getting rid of a positive multiplicative factor (
(k2 + 2w2 ) k
2
k
),
)
We now find the matrix
b
c d
a
associated with this metric by solving the equation
M = 8ET
which yields to the constant change of base matrix
2
0
)
kx + 25z
/k2 + 4w 2 6x
)
/k2
vI-2
k
+4w 2
This means that
Z -I
= vz
We have
-/5
/k
1
2
As e does not depend on time,
F=
J-1
2
+±4w
O
1
=2
k2±4 w2
(
0
2
/k +
4w 2
2
k
= 0, and the generalized Jacobian equals
-kvA;2 4w
42
2
2
k +4w
27
k2 - 4
2
-k/k2±4 w2
The eigenvalues of the symmetric part are found by solving the equation
(A + k k2 +4w2)
2
- k4 = 0
which yields
A =-k vk2+4w2± k 2 < 0
and thus, the system studied is contracting in the whole state space.
Figure (3-2) shows the evolution over time of 6x, and 6z -that is 6x is the new
base. The first one converges to zero, but, as one of the eigenvalues of the symmetric
part of the Jacobian is positive, its norm is lengthening or shrinking depending on the
orientation of the (6x, &i) vector. The norm of the second one is always decreasing
to zero as the two main directions have a negative lengthening.
30
5
20
10
0
_0
0
N
_0
0
-5
-10
-10F
-20
-10
-5
0
dx
5
10
15
-20
0
20
dz
200
1200
1000
150
800
C'J
X 100
N
600
400
50
200
0
0
2
4
6
8
0
10
time
0
2
4
6
8
10
time
Figure 3-2: Evolution of the distance between two trajectories for the system studied
with k
1, w5. Comparison between the original base (on the left), and the
"contracting" base (on the right), for an initial vector (6x, 6±) of (3, 5).
28
Chapter 4
Mathematical proof of the
contraction behavior of a class of
systems of interest
4.1
Introduction
As pointed out in chapter 3, contraction behavior can only be found for oscillators
which behavior does not depend on the initial conditions. This implies that there must
be some energy dissipation in a way, and excludes free oscillation like the undamped
pendulum for example.
Starting with the equation of the damped oscillator with any kind of time-dependent
input U(t):
+k k ± w
= u(t)
which is a contracting system as seen in section 3.4, we felt that adding positive
nonlinear terms to the damping should not perturb too much the contracting behavior
of the system. But of course, any nonlinear system needs a precise analysis before
any conclusion can be drawn.
4.1.1
Statement of the problem
We want to prove that given any function of time u(t), the system verifying
+ (k + ax2 )± + w2 X = U(t)
(4.1)
with w > 0, k > 0, a > 0 and (k, a) y (0, 0), converges to a single trajectory,
independent of the initial conditions of the system (but of course dependent on u(t)).
29
Let us call Xo(t) a trajectory of (4.1) -that is a solution of (4.1) given a set of
initial conditions, and X(t) any other trajectory of (4.1) -that is another solution of
(4.1) differing from Xo(t) by the initial conditions. If we define (t) = X(t) - Xo(t)
we have:
(o
+ )+ (k + o(Xo + )2)(Xo + )+
W2(XO +
U(t)
or, using the fact that Xo(t) is a solution of equation (4.1),
E + (k + a(Xo +
)2)*
+ (w 2
+ 2aXoko) + a, g2 = 0
(4.2)
Thus our problem is to prove that limt,+, (t) = 0 for any trajectory Xo(t), this
is for actually any continuous function of time Xo(t) as u(t) can always be defined as
u(t) = Xo(t) + (k + aX2(t))Xo(t) +W2 Xo(t) so that the function of time Xo(t) chosen
is a trajectory of the system.
4.1.2
Intuition
Let us remark at this point that intuitively this result is at least not obvious. Indeed
if we look at equation (4.2) and try to interpret it physically, we have:
" the term {(k+ a(Xo+)
2 )(},
which is a damping term, depending on time, but
always positive,
" and a spring force term {(w 2 +2aXoio) + oaX 2}, which can be interpreted as
induced by a potential of the form {a(t) 2 + b(t)(3}, and thus intuitively could
suggest that at least with certain initial conditions, is going to diverge (due
to the term in
3).
But trying to find a counter example to the result we wanted to prove failed. This
lead us to the feeling that the dynamic of that potential linked to the dynamic of the
damping was such that, the coefficients {a(Xo + )2}, a, and b, were depending on
time in a way would always be "call back" to 0 soon enough so that it would not
diverge; this is what is proven next. To be more specific, it is interesting to note that
verifying equation (4.2) without the term {(Xo + c)2} in the damping, does not
always converge to 0 in general -there exists some Xo for which does not converge
to 0; thus, in this case, the intuition given by the form of the potential is right. We
can conclude that the dependence on time of the damping term is fundamental to
make converge.
30
4.2
Demonstration
4.2.1
Integration
Let us rewrite (4.2):
E + k + w2 d + a(Xg + 2XO
+
0
2c
+ 2X 0 ko +
0
2
) - 0
and remark that
(X
+ 2X 0
+
d (a(XO2
+ _kg2)
+ 2X2k
dt
+ Xg2 +
3
)
thus we have
. -+
2
d
(X
3
+Xg
dt
3
=0
that we can rewrite
(+ k + U)2 +
(d (2
+ (X0 +
)2)=0
which integrates in
(t) +(()+(t[k+
(t)[k + a(
=
+(X0 (t) +
2)
t b2((
(X(t
± (t))±fw(T)dT
(0) + (0)[k + a(
2
d
+ (Xo(0) +
-)2)]
(4.3)
The interesting feature of this formulation is that the term of damping in addition
to k is {a(')
(X 0 (t)+ K) 2)} which is always positive and thus confines the liberty
of Xo(t) in this positive term.
4.2.2
Choice of a convenient origin of time
We will suppose, without restricting the generality of our demonstration, that (0) > 0
and define ti as the first time (t) = 0 and (t) < 0, so for t c [0,t 1 ,1(t) > 0.
If t1 does not exist, then limt,+, (t) = 0. Indeed, if this is not the case, as (t)
is positive, it would mean that limt,+, ,(()dT
j, w 2
= +oc and as the second term of
(4.3) is a constant, and
(t)[k+a(
+(X
+t)
0 (t)+
))2)] >
0, the only way to counter
it would be that limte+, (t) = -oo which is of course incompatible with the fact
that (t) stays positive.
If t1 exists, with the same reasoning, either limt,+) (t) = 0, or there exists a t 2
such that (t 2 ) = 0, (t 2 ) > 0 and for t E [ti, t 2J, (t) < 031
Let us define h(t) = (t) + (t)[k + c()
h(ti) = (ti) < 0 and h(t 2 ) = (t 2 ) > 0 thus ]t
o
+ (Xo(t) -i
+
)2)].
We then have
E [ti, t2 such that h(to) = 0.
From now on, let us consider that we choose to as the origin of time and rewrite
(4.3) for t > to :
+
+(t)
4.2.3
[(t)[k + a(
+ (Xo(t) +
)2)] +
(4.4)
W2(()dT = 0
Final step
By multiplying equation (4.4) by (t) we get:
M(t)
(t) +
2
(t)[k + a(
2
12
+ (Xo(t) +
I
2
W)
2
w2 (T)dT = 0
and by integrating with respect to time:
2(t)
2
+
((r)[k
+ a( 12
+ W2
+(T) ) 2
2 2)]dr+T
+ (Xo(T)
(Td)dT]
2
2
2(to)
2
All the terms of the left side of this equation are positive, so if we do not have
limt+O p 2 (t) = 0, the term
J
$( )
t2 (T)[k+
12
+
T)2
+ (Xo (T) +
_)
k
_d
to
2
(-)d- or
I12
d
goes to infinity and there is no way it can be compensated by another term to get
the whole sum equal to a constant.
It is interesting to note that it is the term corresponding to the damping that
enable us to conclude, which is coherent with the intuition exposed in section 4.1.2.
Thus we have proved that limt,+
$2(t)= 0 and thus that for any input function
of time u(t) the system
, +
± 2x = u(t)
(k + ax2 )± +
converges to a single trajectory no matter what the initial conditions of the system
are.
32
4.3
Generalization
Let us generalize this result and prove it for the systems verifying:
z+
(k + ax2 ")d + wx = u(t)
n being an integer.
It is already true for n = 0 and 1. Let us prove it for n = 2.
The only thing we have to do in order to be able to use the previous demonstration
is to put the equation that satisfies in the form of (4.3) where the important feature
is that the term in addition of k in the damping is positive.
4.3.1
Case n = 2
So, for n = 2 we have
(X0 +
E)+
(k + a(Xo + )4)(Xo + ) + w2 (Xo + )
u(t)
which we can rewrite
a[
+ (4X
+6X2
2
+ 4X 0o 3 +
+4X03
)Xo + (X4
+6X2
2
+ 4X 0o 3 ) ]
0
or
d (a(X04
+ 2X03 + 2XE 2 + XO0 + 54
-)0
or
+ k +W2
+ d(a [X
I-+
2
) +
2
(X0 +
2
)2+
-])=0
80
which integrates in
(t)
+
(t)(k + oz[(Xo(t) +
=i(O)
+ ()(k
) +
+ a[(X (0)
2 (t)
+
)2
S80
2
2
+ M))4
+
2
2 20) (X (0) +
It
W2
(T)dT
p4 (0])
)2 + 80
From there, the same reasoning as in the case where n = 1 holds, and we get the
33
conclusion we want, which is that given any input function u(t) the system
i +
(k + ax%)i +W2x = u(t)
converges to a single trajectory.
4.3.2
General Case
The last case enables us to get insight on how the generalization is going to take
place:
We have
(X0 + ) + (k + a(Xo
Defining
+ )2n)(X§
+
)+
we have the expression (XO +
n!
w2 (Xo +
)=
) E2
n
u(t)
CkX k
2
n-k which
gives us:
2n
2n-1
+k
+ w2 + a[cO( >( CknXak
2n-k)
+ g2n + *(Z C XkY 2 n-k)] = 0
k=O
k=1
or
2n
+ k +
2
+ a[
2n+
(Ck
Xk-2n-k+1
2
+ c4kX
0
nki)=
k=1
which we can rewrite
2n
a[t2n
(2n)!
(kXk-1
+
2
n-k+lX 0 +
(2n - k +
l)Xk
2
n-k)]
0
k=1
or
S+ k +_2
d +[2n+1
+ + 1
dt 2n
d
2n
(2n)! +)!Xo
(kH 1 k! (2n - k + 1)! "10*
E
n-
0
2n
dt [a<(Yk2n -C2k + 1 X-
2
n-k)
0
At this point we would like to prove that the expression E"O 2n-X
34
2nk is
always positive.
Let us manipulate this expression in order to prove what we want:
2n
1
k=O
n-
Xk
2
1
nk
2
ZC n+1X
(Xo +
n-k-
(2n +1)
k=O
2n+1
2n+1 _ X
2
n+l
(4.5)
) 2n+1
0
X0
Of course in the two last expressions we have to exclude the times when X 0 (t) = 0
or (t) = 0, which is fine as at those times the expression we are looking at is 0 and
thus positive.
Now, excluding those cases, the sign of this expression is given by the sign of
{{[(1 +I
)2n+1 _ 1]}
" either X 0 and
have the same sign and the two factors of this expression are
positive, so is the expression.
" or X 0 and
have an opposite sign and the two factor of the expression are
negative, and the expression is positive (as either {1 > 1+
> 0} and {(1 +
< 0} and the second factor is also negative).
)2n+ - 1 < 0}, or {1 +
This is the result we were looking for and by defining
2n
w(e (t)
k
(t)) =
w
n
k=O
2n
X2n-k
lO
k
we can write
d
S+ k +w2 [ d [cal(Xo t), (t))]
0
which integrates in
(()+ (t) [k + wl (X0 (t),())
+
(t
W2 (T)dT
(0) + (0)[k + a (X(0), (0))]
--
and as {ca(X 0 (t), (t)) > 0} the same reasoning as in the case n = 1 holds which
leads us to the following general result:
The system verifying
z+
(k + ox 2,). + w
35
=
u(t)
(4.6)
(n being an integer; w, k, and a positive real numbers with (k, a) # (0, 0)) converges
to a single trajectory -depending of course on all the parameters n, W, k, a, and u(t),
but not on the initial conditions.
4.4
Extension
4.4.1
Result
The last result can be generalized to get the following result:
Given P(x) = EN- /X 2 n with Vn /n > 0 and not all the
#3 equal
0, the system
+ w2x = u(t)
i + [P(x)]
(4.7)
converges to a single trajectory in the same sense as described before.
4.4.2
Proof
Indeed, everything works the same way:
We have:
(X0 + ) + [P(X 0 +
(
+ W2 (Xo + )
+
U(t)
which gives us
N
+ w2 +v
2n
2n-1
+ (
3E X 0 (
Z
Xk 2 n-k)
C4
which, by defining
D2n
((t) + ((t)[ZEnO
0 n
-
+[
dt
n=O
O (S 2n
kr=O
(XO(t), (t)) =
2n (XO(t),
C2 Xk
+
2
n-k)l
= 0
k=1
2n
+w
2
k=O
n=1
2
+
2n
CCk2 "
-
k +1
C2_
X
Xk2n k)] = 0
2n-k
> 0, we can integrate in
(t))] + fo w2 (()dr
N
= (0) + ((0) [E On
2n
(XO (0), ((0)))
nz=O
The fact that ENO
> 0 enables us to follow the same reasoning
as in sections 4.2.2 and 4.2.3 which leads us to the result stated in section 4.4.1.
On 42n(Xo(t),
(t))
36
4.4.3
Simulation
Figure (4-1) shows an example of such a behavior for the system:
, + k(3X 2 + 3x 8 ) + w 2 x = ln(1 + sin 2 (t))
with k =1, w = 1, and the initial conditions for the two systems: (Xi(0), ±l(0), X2 (0),
(2, 1, 1, 0). This example was chosen so that it would not be simple, and thus give an
interesting illustration.
.
3
2
.
.
0.5 0
X
1
0
0
0
50
100
150
-0.5'
2C0
time
0
50
100
150
200
150
200
time
-
1
-- 4
0.4
0.2
1
0
-a.
0.5
0
-N
-0.2
0
C
50
100
150
2(
-0.4
0
0
50
100
time
time
2
1
1
0
0.5 F
_0
V~
X
0
-1
0
50
100
150
0
-0.5'
200
OMM 0
50
100
time
150
200
time
Figure 4-1: Contracting behavior of , + k(3x 2 + 3x 8 )± - w 2 x = ln(1 + sin 2 (t)) with
k = 1, i = 1, and (xi(0), Ji1(0), X2(0), x 2 (0)) = (2,1, 1, 0).
4.5
Higher order
We can extend this result to the study of higher order systems of the kind
±(n+2)
+ [P(x)]x(n+ 1 + W2(n
(t).
Indeed, the result we get applies to x('), and thus we know that for any initial
37
2(0))
conditions of the 0 to (n + 1) derivatives, the (n), and higher order derivatives, will
converge to a single trajectory. Or in another way, (n), (n+1) and (n+2) will converge
to 0, and thus (n-1) converges to a constant, (n-2) is converging to a linear function,
and so on, so that we at least know how the two neighboring trajectories diverge
(which is determined by the way behaves).
38
Chapter 5
Studies of Contraction of systems
requiring the use of a Metric
5.1
Contraction analysis of a class of system similar to chapter 4's
The generalizations made in the previous chapter lead us to wonder what is the
situation for a similar kind of class of systems. Thus, let us look at the systems of
the form
+
+
with Q(x)
5.1.1
=
0 Yn 2 n+ 1
k± + w2Q(x) = u(t)
(5.1)
with Vn ps., > 0 and not all the p, equal 0.
Introduction
The intuition is that we are adding to the linear damped oscillator only potentials of
2
the form nX2n+
which are stabilizing.
Moreover, trying to derive the same kind of proof as in the previous chapter starts
well. Indeed we have, with the same notations as previously,
(X 0 +)
+ k(Xo +)
+w 2Q(Xo-i+)
= u(t)
which gives us
N
k
2
pn[
(Xo +
w W2
n=O
39
) 2 n+1 _ X2n+l]
=0
or
.
.
&+ k g +
U)2
2
N
6 Z' pn[
(XO
+
)2n+1
-
X2n+1
-]X=
0
(5.2)
n=0
Now we know that the expression in brackets is positive, as it is the one studied in
derivation (4.5) times (2n+ 1). Equation (5.2) is very similar to the damped oscillator
one with no input; a time-dependent factor is modifying the last term but is always
positive. Thus we could legitimaly think that it would behave the same way the
damped oscillator does, and that we would be able to prove that limt,+oo (t) = 0.
So we tried to use the same kind of proof than the one exposed in section (4.2), taking
advantage of the fact again that the indefinite function of time Xo(t) is confined in
a positive term. Unfortunately, although the first integration works out well, as well
as the argument about the convenient origin of time, the second integration carried
in the final step cannot be done.
At this point, although we felt we were close to the result, we could not get it
rigorously, and some simulations showed us why: in general this type of system is
not always contracting. Indeed there are some counter examples. For example the
system z + 0.1± + x 5 = 6 sin(t) with initial conditions (2, 3) is chaotic, figure (5-1)
shows the simulation. 1
But some other systems of this type are definitely contracting; finding a condition
for a system of this type to be contracting is thus of interest.
We now can notice that the fact that in general the system (5.1) is not contracting can be understood by remarking that, contrary to the linearly damped oscillator,
here, in equation (5.2), the force that is applied to depends on the trajectory Xo(t),
and thus has no reason to converge to 0 in the general case - which makes the results
found in chapter 4 even more interesting.
We apply Contraction Analysis using a time varying metric to find a condition on
the system to be contracting. In the general case, trying to find a time varying metric
is difficult as there is no general method for that. Here, as the system has the same
form of equation as the damped oscillator's, we tried to find a time varying metric
close to the constant one found in section (3.4). This method works out well because
of the particular form of the Jacobian, featuring the same kind of property as the one
of the damped oscillator. The type of systems studied in chapter 4 contains a product
of type x., which appears in the Jacobian, and consequently make the direct search
of a metric intractable. This is why we were lead to a different derivation than the
one conducted here; but we will come back in this chapter on the contraction analysis
of the system (4.1) to be able to prove the exponential property of the convergence
'Chaos can only appear with at least third order systems when there is no input. Here the system
is second order, but there is a driving force which self frequency has nothing to do with the one of
the system, which is a supplementary source of disorder and thus induces the chaotic behavior.
40
4
10
2
x
0
0
0
-2
-5
0
20
40
0
60
20
40
60
40
60
40
60
time
time
4
10
2
-0
x
-2
0
-5
0
20
40
-10
60
0
20
time
time
4
20
2
~0 101
C,.j
x
0
-2
-40
0
_0
"AA4A.
0
.
20
40
-10
60
0
20
time
Figure 5-1: 5i+O.1±+x5
time
6 sin(t) with (x1(O), ±i(O), x2 (O),
41
±2(0)) =
(2, 3, 2.1, 3.1)
result found in chapter 4.
5.1.2
Mathematical derivation
Here the Jacobian is
2
-W2R(x) )0
-k1k)
dQ(x)
=
nZ$2i
thus R(x) > 0 which is fundamental to
0 (2n +
be able to choose for this case the following extension of the metric M of the linear
damped pendulum as
with R(x) =
[k
2
+ 2w 2 R(x)]
k
k
2
which is thus definite positive.
We now find the matrix
b
a
C
dJ
associated with this metric by solving the equation
M = OETE
which yields
k
+
(
1
2
4w2 R(x)
Vk
k2 + 4w 2 R(x)
2
0
)
0
2
4w2 R(x)
2k
-k
J
and
0
2
v-2w R'(x)
Vk 2 +4w 2 R(x)
)
0
0
d
with R'(x) =dlR(x)
This yields the generalized Jacobian F = (63 + 0J)8k2
1
F
2 j
+ 4W2 R(x)
2
-k k2 k+2 4w
+ 24w
R(x)
R(x)
42
2
2
R(x)k24w4w
R(x)
-
4W 2 R(x)
k jk
2
+ 4w 2 R(xc)
)
The condition for the system to be contracting is that the generalized Jacobian be
negative definite, which is equivalent to the following matrix being negative definite:
-k(k 2 + 4w 2 R(x))
k 2 \k 2 4W2 R(x)
k2
k2 + 4w 2R(x)
4w2 R'(x) - k(k
2
± 4W2 R(x)) )
The eigenvalue computation gives the following two conditions 2
k(k 2 + 4w 2 R(x)) - 2w 2 R'(x) > 0
(5.3)
k(k 2 + 4w 2 R(x)) - 4w 2 R'(x) > k3
(5.4)
and
The first condition leads to: 0 +2kR(x) > R'(x) and the second to: kR(x) > R'(x).
Thus, as R(x) > 0, if the second condition is verified, the first one is automatically,
and we obtain the condition for the system to be contracting:
kR(x) > R'(x)
5.1.3
(5.5)
Interpretation
So basically, this is always true if R'(x) < 0; and if k is large, there is less restriction on
the trajectory, which is verified in simulations. This is of course a sufficient condition
only.
It is satisfying to remark that this condition is not verified for the chaotic counterexample shown in figure (5-1). This case is reproduced on figure (5-2) with the last
plot showing the sign of the expression supposed to be positive (and which is not).
A simple example of this condition being satisfied appears when a trajectory of
the form x(t) = a + be-" (with a, b, c > 0) is picked, for which R'(x) is always going
to be negative as R'(x) =
n0 2n(2n + 1)pnx 24 1 ± and x > 0 and ± < 0. Such an
example is shown in figure (5-3).
Given this condition, and a particular system (giving k and R(x)), we can plot the
contraction region in the phase plane (x, -) in which the trajectory has to stay to guarantee contraction. Figure (5-4) shows this region for the system: , + 10 +1 Ox + x 5
U(t).
If we know that R(x) is never going to be null (for example if the x coefficient in
We get aA2 + bA + c = 0 with a = 1, b = 2k(k 2 + 4W2 R(x)) - 4W2 R'(x), and c = k(k 2 +
b-4ac
The conditions correspond
4w 2 R(x))(k(k 2 +4W 2 R(x)) - 4W2 R'(x) - k3 ). We have A = -b±2
2a
respectively to b > 0 and c > 0. As the matrix is symmetric real we know that its eigenvalues are
real and thus that the determinant A = b2 - 4ac is positive.
2
43
10
5
0
0
20
40
60
0
20
10
5
C\
40
60
40
60
40
60
tm
im
0
c\j
2
0
20
5
40
0
-10
60
0
ime
10
20
-timia
c'j
0
-5
00
40
40
20
20
- 0.
-10
60
-
0
20
time
1 OC
C
~0
0
0
U
- IUU
0
20
40
60
time
Figure 5-2: Same system as in figure (5-1) with the last plot showing the sign of the
expression {5kx 4 - 20x 3 ±} which doesn't stay positive.
44
4
0
3
.; 3.5 -
-0.5-
x
3
'
2
,
0
5
-1
6
4
8
10
-
0
20I
M'
2
4
2
4
6
8
10
6
8
10
6
8
10
4
X
2
0
X
3
2
0
6
4
8
-20
10
imP
0.2
0
tim
20!
05
-0
N~
X
0
I5 0
X
0
-0.2
0
4
'
'
2
4
101 xl,
'
'
'
6
8
10
X
-20
0
2
,
time
4
time
0
-50
0
2
4
6
8
10
time
Figure 5-3: Contraction behavior of the system ,++x
(3 + e-) 7 and initial conditions (xi(0), zI(0), x 2 (0),
3 +x 7
±2(0))
e-t -e-t+(3+et-)3 +
(4, - 1, 4.1, - 1.1).
The last plot shows that the expression {kR(x) - R'(x)} is always positive and thus
that the sufficient condition for the system to be contracting is satisfied -and we can
see that the system is indeed contracting.
45
80
.................
60
-
40
..............
.
...
.....
......
..
........
... ... -
20
...
...
.....
..
...
0
_0
x
-.
0
-.
-.
. .. .
....
........ -
.-..
-20 - . . . . . . . . . . . . . . . . . . . . . . .
. .-.
.-
-..
-40
-.
. . . .. . . .
.
-60
-80
-1
0
-8
-6
-4
-2
0
x
2
4
6
8
10
Figure 5-4: System ± + 10± + 10x + x5 = u(t). The contraction region lies between
the two plotted curves.
46
Q(x) is not null, that is [o
#
0), this condition can be rewritten as:
k >k>R'(x)d ='(x
- d[ln(R[x(t)])]
R(x)
dt
which means that the logarithm of R(x) do not increase too fast. This derivative
is likely to be big if R(x) increases when its value is between 0 and 1. Thus, if
for example [to is big, as R(x) ;> po, it is likely that for a smooth behavior of the
trajectory, the condition will be satisfied. An example is given in figure (5-5).
2
0
0-
X -1
-
-2
0
1
5
,
10
15
time
0
5
0
5
10
15
10
15
10
15
2
0-
C\ -1
0
-2
0
10
5
15
2
timin
2
time
~0
C\1
X
~0
0
0
-4
5
10
0
15
5
time
timo
100
5 5050
0
0
5
10
15
time
Figure 5-5: Contraction behavior of the system ,%+ 2i + 7x + 3x 3 = - cos(t) 2sin(t) + 7cos(t) + 3cos 3 (t) and initial conditions (xi(0), ±I(0), x 2 (0), ±2(0))
(1.5, - 1, 0, 0), with the last plot showing the positiveness of the expression
{kR(x) - R'(x)}, thus showing that the condition (5.5) is satisfied.
47
5.2
5.2.1
Scalar system
Introduction
One question which occurs naturally when studying contraction theory is: Is a system
exponentially convergent with a 0 input, contracting ?
Let us study the case of the following scalar system:
S=-g(x, t) x + u(t) with V x, V t, g(x, t) ;> a > 0
(5.6)
If u(t) = 0 (nominal system), this system is exponentially converging as we have
±
-
x
d
ln(x) = -g(x, t) < -a
dt
-> x(t) < xoet
Contraction theory studies the behavior of the infinitesimal distance 116xl| between
two neighboring trajectories, which has no reason to converge exponentially (one
should always have in mind that contraction analysis is valid for any input u(t)).
Indeed the Jacobian of the system is
J(x, t)
-
-g(x,
t)
- x
g(X, t)
ax
which has no reason to be always negative.
For example if g(x, t) = 1 + (x - 5)2, the Jacobian is J(x, t)
-1 - (x - 5)2
2x(x -5). If we take X(t) -3+ arctan(t), choose u(t) X(t)+g(X(t), t) X(t) and
set the initial condition to the adequate value X(0) = 3, then X(t) is the solution of
the differential equation (5.6), thus X(t) is the trajectory followed by the system. In
this case, the system is starting at 3 and increasing tending to 4, and the Jacobian is
always strictly positive, starting at 7, increasing, and then decreasing tending to 6.
2
If the Jacobian is always negative, the system is contracting in the whole state
space. This is the case for example if g does not depend on the trajectory, which
implies that L9
0 and J(t) = -g(t) < -a < 0. Or also if g(x, t) is increasing with
ax
x for x > 0, and decreasing with x for x < 0.
For the case the Jacobian is not always negative, determining whether the system
is or is not contracting implies to find a metric.
48
5.2.2
Metric search
As exposed in sections 3.2.1 and 3.2.2, if a metric m(x, t) uniformly definite positive
exists, there must exist a # > 0 such that
J(x, t)m(x, t) + rh(x, t) + m(x, t) J(x, t) < - Om(x, t)
,# r(x, t) < - (0 + 2J(x, t))m(X, t)
(5.7)
In the regions where J(x, t) < 0, any positive constant is a metric. In the regions
where J(x, t) > 0 we see that the metric has to be time dependent so that the inequality (5.7) can be verified.
Now if the Jacobian is always positive we have
Th(X, t) < -#m(X, t) -> m(X(t), t) < m(XO, 0)e-,3
and thus there is no way we can find a metric uniformly definite positive, and thus
the system is not contracting (converse theorem -section 3.2.2).
Here we can remark that this result can be derived just by looking at the equation
-_J(x, t) 6x. Indeed, this equation means that, anytime the distance between two
neighboring trajectories is infinitesimal, its dynamic verify this equation. And thus
if J(x, t) > 0, such an infinitesimal distance always stays constant or increase, so it
cannot converge to 0. So the system cannot be contracting.
In the case when the Jacobian changes sign over time we obtain a necessary and
sufficient condition for the system to be contracting by the following: we have from
equation (5.7), as m(x, t) > 0,
rh~~,
t)=
m(x, t)
->
dt
n (m (x, t)) <
(x (t),7t) < mn(x0)
( + 2J(x, t))
C-- fA ( +2J x
T,
))d
thus
a necessary and sufficient condition that a uniformly positive metric m(x(t), t) exists is that there exists a # > 0 such that the integral
0'(#+ 2J(x(T), r))dT be upper bounded over time.
Indeed if this is not the case, this integral tends to infinity, and m(x(t), t) cannot
be uniformly positive.
49
And if it is the case, we have
3# > 0 and " A > 0 such that V t
j(3 +
2J(x(T), T))d
<A
(5.8)
and the metric m(x(t), t) defined by
m(x(t), t) = m(Xo, 0)e- fO(/+2J(x(r),r))dT > m(xo, 0)e-A > 0
is uniformly definite positive (with of course m(xo, 0) chosen to be strictly positive).
The condition (5.8) is equivalent to
El
>0and 3 A >0 suchthatV t
J(X(r), 7)d7 < A2
which means that the Jacobian in mean is enough negative over time, even though it
might be positive sometimes; the condition is that the integral of the Jacobian over
time tends to -oc at least linearly with t.
5.2.3
Example
An example of condition (5.8) being verified although the Jacobian gets positive an
infinite number of times as t goes to infinity is the following:
We take g(x, t) = (x + 5)2 + 1, and make the trajectory be X(t) = sin(t) - 5 (by
choosing u(t) = cos(t) + (sin(t) - 5)(sin 2 (t) + 1) and X(0) = -5).
The Jacobian is in this case J(x, t) = -(x + 5)2 - 1 - 2x(x + 5), which is for this
trajectory, J(X, t) = -3 sin 2 (t) - 1 + 10 sin(t), and thus is not always negative as for
example t =[2ir] - J 6.
Let us look now at the integral of the Jacobian over time:
(-3 sin2(r) - 1 + 10sin(T))dr =-3]
-(+
3
2
1)t +
2s 2 dT
-
t + 10(1
-
cos(t))
3
5
3
sin(2t) + 10(1 - cos(t)) < - t + 20 +
4
- 2
4
So we have the condition (5.8) with A = 2 and
for this trajectory with the metric
5. Thus the system is contracting
m(X(t), t) = m(X (0), 0)C- ft(5+2J((T),T))dT > m(X(0), 0)e
> 0
(m(X(0), 0) being any strictly positive number). O(X(t), t) which verify 0 2 (X(t), t)
m(X(t), t) is such that 6z = 0(X(t), t) 6x is always decreasing.
50
Figure (5-6) shows the simulation.
X
-
-3
-4 -
-4
-5
-5
x
-6 -7
0
-6
5
10
-7
15
)
5
time
10
15
10
15
time
2
1.5r
-a
1
N
-a
1
0
O.5
C
0
5
10
-1
15
time
1ic
0
5
time
1
0
0
0
10
-20 '0
10
5
15
time
Figure 5-6: The two plots on the first line show: on the left, the nominal trajectory, on
the right, the perturbed trajectory (with initial perturbation equal to 0.01). The first
plot of the second line shows the difference between the nominal and the perturbed
trajectory (which tends to 0 as the system is contracting). The second plot of the
second line shows 6z = O(X(t), t) 6x which is always decreasing as the Generalized
Jacobian F
+ J is negative definite (~ -2.5).
And the last plot shows the
Jacobian over time, which is not always negative, still the system is contracting with
respect to the metric m(X(t), t) (here m(X(0), 0) = 4.104).
51
5.3
Study of convergence of the state space of a
n dimensional system to a space of dimension
(n - 1)
5.3.1
Introduction
The following second order system
_
+ X(1 -X2
Sz=y
-X
+ y(
2)
- X2 _ Y2)
with initial conditions different from (0, 0), tends to a limit cycle [10]. This can
be shown with the Lyapunov function V(x, y) = (1 - x2 _ y 2 )2 which is such that
V(x, y) = -4(X2 + y 2 )V(x, y), and thus the system tends to the centered circle of
radius 1. So this second order system tends to a one dimensional system.
Let us study this property using the result stated in section (3.3.2): in a region
where the trace of the Jacobian of a system is uniformly definite negative, volumes of
this system which stay in this region, tend to 0. If we consider a second order system,
this means that the state space in this region converges to a one dimensional space.
An interesting feature of this result is that, like the Contraction property, it does not
depend on any time varying input added to the system. Thus we are looking at the
property of converging to a one dimensional space for the following system:
Sy
(
5.3.2
+ X(1 - X2 _ Y 2))ut
)X
+ y(I
x2_
2)
)
±
V (t)
Second order system
The Jacobian of this system is
J
1 - 3X2 _2
-1 - 2xy
1 -2XY
I - x2 - 3y2
and we get Tr(J) = 2 - 4(x 2 + y2 ). This trace is thus uniformly definite negative in
any region of the two dimensional state space excluding strictly the centered circle of
radius 1 . And thus the state space in {!R2/C(0,
)}, the exclusion being strict, is
converging to a one dimensional space. This means that all the trajectories staying
in this region converge to a one dimensional space -this space being time dependent
in general.
We can extend this restriction on the trajectory by trying to find a change of base
E in which the trace of the generalized Jacobian F is still uniformly definite negative
although the trace of the Jacobian itself (in the canonical base) is not. Indeed, in a
52
region where Tr(F) is uniformly definite negative, volumes converges to 0 too, as this
property does not depend on the base in which volumes are computed, the same way
the dimension of a space does not depend on its base.
We have F = 00-1+J0 which implies that Tr(F) = Tr(60-1 )+Tr(OJO01 )
Tr(00') + Tr(J). Tr(F) is uniformly definite negative within a certain region is
equivalent to
3 E > 0 such that V(x, y) in that region Tr(F) <
-E
or, taking into account the expression of Tr(F) derived,
3 E > 0 such that V(x, y) in that region Tr(60- 1 )
Now, for any change of base matrix O(t) =
< -E
+
4(x2 + y2 ) - 2
(5.9)
(t)c (t)
b(t)
we have det(0)
d(t) ]
ad - bc, which has to stay uniformly different from 0 so that the associated metric
M = )T 0 is uniformly definite positive. We have, by computation
Tr (6 -1)
-
det (0)
det(0)
Combining with equation (5.9) we get
det ()<
det(0)
-E
+ 4(X2 + y 2 ) - 2
-
which gives
Sdet (E)(t))| < Idet (E)(0)) 1eCfO'[-+4(X2(T+y2(T))-]d
Thus
f[-E +
4(X2(T) +
y 2 (T))
- 2]dT has to be lower bounded so that det(0) can
stay uniformly different from 0.
Thus we have the following necessary and sufficient condition for the trace of F
to be uniformly definite negative:
E E > 0 and 3 B < 0 such that V t
[4(X2(T) + y 2 (T)) - 2]dT > B + Et
(5.10)
which intuitively means that the trajectory does not enter too much over time the
.
centered circle of radius
If this condition is verified, we can choose any matrix 0(t) such that det(0(t))
det( (0)) efKE+4
>(T)y(T)>-2]dT (with det(6(0)) being any strictly positive number), for example 0(t)
=
det((0))efj[-e4(x
det(E(0))
0
53
2
2
(T)+y (T)>2]dT
0
1
'
, and the trace of
the generalized Jacobian associated with this change of base is uniformly definite negative. Thus, all the trajectories within the region verifying condition (5.10) converge
to a one dimensional space (in general depending on time).
See last paragraph of next subsection for a discussion on why starting this whole
reasoning at t = 0 (as it is done here), or at any other time t = to leads to the same
result on the dimension of the space to which the trajectories converge, with the same
necessary and sufficient condition.
5.3.3
n dimensional case
It is interesting to note that the relation
1
Tr(eO
-
det ( )
det(0)
(5.11)
is true for any dimension. Indeed we have the following equality, true for any invertible
matrix,
1_
'Com(E)
det(0)
Com(e) being the matrix composed of O's cofactors. We then see by computation 3
that Tr(e Com(e)) = det (e), which leads to equation (5.11).
We thus can extend the previous result to any system of any dimension.
Let us consider a n dimensional system of the form + = f(x, t). We have, as
explained previously, Tr(F) = Tr(60-1)+Tr(J). Tr(F) is uniformly definite negative
is equivalent to
] E > 0 such that Vx Tr(F) < -E
or, using the previous derivations,
(0) <
-E-
Idet (E (t))l < Idet(E)(0))l cf1E
-'_'
A E>
0 such that Vx det
det(0)
Tr(J(x, t))
which leads similarly to
3
(X(T)'T))]d-
or by differential calculus: considering the analytical properties of the determinant, we have
d(det(E)).6 = Tr(OtCom(E))
54
and thus, J [E + Tr(J(X(T), T))]dT has to be upper bounded so that det(9) can stay
uniformly different from 0.
Thus we have the following necessary and sufficient condition for the existence of
a generalized Jacobian F which trace is uniformly definite negative:
SE >0 and ] A> 0 such thatVt j
Tr(J(x(T),T))dT < A - Et
(5.12)
and if this condition is verified within a certain region, all the trajectories within this
region converge to a space of dimension (n - 1).
Let us note that, to conclude that all the trajectories within a region converge
to a space of dimension (n - 1), only the behavior when t tends to infinity matters.
Indeed, if trace of F is not uniformly negative from t = 0, but only from any fixed
time t = to, the same reasoning apply. Indeed, it means that the rate of variation of
volume may not be always negative for t C [0, to], but as this interval is bounded, we
know that volumes at t = to will be bounded, and thus volumes will still converge to
0 as t goes to infinity if the trace of F is uniformly negative for t > to.
And actually, the necessary and sufficient condition (5.12) found, does not depend
neither on the origin of time. Indeed, if to exists such that
3
E>0
and
AO > 0 such that Vt> to
]
Tr(J(x(T), T))dT < Ao - Et
then
3 E > 0 and ]
A > 0 such that V t
Tr(J((T), T))dT <A
-
Et
/t
as A can for example be defined by A = Ao + f4o Tr(J(X(T), T))dT. This actually
shows that if a matrix 90 exists such that the trace of the corresponding generalized
Jacobian Fo is uniformly definite negative for t > to, then there exists a matrix 0
such that the trace of the corresponding generalized Jacobian F is uniformly negative
definite for all t.
5.4
5.4.1
Study of exponential convergence for the system introduced in 4.1.1
Introduction
Inspired by the studies of contracting regions for different types of systems in the
beginning of this chapter, we try here to determine a region where the system intro55
duced in 4.1.1 is contracting. This would enable to have the exponential convergence
in this region, and thus a stronger result, for this region, than the one we get in
chapter 4. Indeed, the result proved in chapter 4 is valid for the whole state space,
but does not prove exponential convergence -still, by looking at the similarities between the equations and the linearly damped oscillator equation, such an exponential
convergence is very likely.
5.4.2
Analytical Study
We use the constant metric found when studying Contraction for the linearly damped
oscillator (section 3.4). We compute the generalized Jacobian, and the required negative definiteness of the generalized Jacobian imposes a condition that defines the
contracting region with this metric.
The system is
i + (k + ax2 )± + w2 x
±))
Its Jacobian (with the variables (x,
e
u(t)
is
.- x_-W2
The change of base
-
(k + ax
2
)
corresponding to the constant metric found in section 3.4 is
1
k
(
/
k 2-+4w
20
2
and we have
0
/2/k2
As 9 does not depend on time,
F - OJ
-F -
1
k 2 44w
2 ee=2
(
2
O
k2 ±4w 2
4 w2 (
=
2
-k
0, and the generalized Jacobian equals
(k +2x
k
2
2
k2
)
4w
4w 2 k 2 -4
2
2
+ 2ax(kx - 4±)
-k k 2 +4w 2
which symmetric part is
F + FT
2
(-(k
1
2
2 /k ±4w
2
+ 2ax 2 )v/k2 +4w 2
k 2 + ax(kx - 4)
k2 + ax(kx - 4)
-k/k 2 + 4w 2
The equation that the eigenvalues A of this matrix satisfy is
A2 + 2A(k
2
+
)k2442+
Ux
k(k + 2)(k
56
2
+ 4 2)
(k 2 + ax(kx-4))
2
=0
For those eigenvalues to be strictly negative the conditions are (see footnote of 5.1.2)
2(k + ax 2 )v/k 2 + 4w2 > 0
and
(k 2 + ax(kx - 4.))2 - k(k + 2ax 2 )(k 2 + 4W2 ) < 0
The first condition is always true, and the second leads to
(16a
2
X2 ).2
- 8ax(akx2 + k 2 )± + (akx2 + k 2) 2 - k(k + 2ax 2 )(k 2 + 4W2 ) < 0 (5.13)
The solutions of the corresponding second degree equation in : are
1
4
k(x +
[
) -I
ax
k (k2
± 4W2)(
a
x2
+ 2a)
(5.14)
As 16a 2X2 > 0, the inequality (5.13) is true if ± lies between the solutions (5.14).
This defines a region in the (x, ±) plane in which the system is contracting. As
(5.14) is not defined for x = 0, this region is actually defined by 4 asymptotic curves,
symmetric 2 by 2 with respect to the origin.
5.4.3
Visualization and interest
Plotting these curves for different values of k, a, and w enables to visualize what
this region looks like. It then enables to realize that it can contain (depending on the
k, a, and w coefficients) the limit cycle of the corresponding van der Pol oscillator
defined by
+ a(X 2
-
1)w+
2
x
= 0
with the same coefficients a and w.
Plots showing the region, and the limit cycle of the corresponding van der Pol
oscillator, for different sets of coefficients, are presented in figure (5-7).
The interest here, is that we thus know, that if the trajectory followed by the
contracting system is the one of the corresponding van der Pol, this trajectory is
contracting.
57
1
20
100
100
.-
80
151...
.....
... -
60
80
- - - - --.
60
-- --
40
-.........
.-..
10
40 -- -5
-
0 -.. . .. . . . . . .
-20
-15
-205
--
0
-r
-5
-10
201
20
0-
0
. -
....
-20
- .--....... .-.
-40
-40
-
-60
-60
-
-80
-80--
-1
0
-100
-5
0
5
-100
-5
0
x
5
Figure 5-7: The region bounded by the 4 asymptotic curves on each plot is the
contracting region for the system, and the limit cycle of the corresponding van der
Pol is plotted inside this region. The coefficients (k, oz, w) are: (1, 0.1, 1) for the
left plot, (10, 1, 6) for the middle plot, and (12, 2, 10) for the right plot.
58
5.5
5.5.1
Contraction study of the damped van der Pol
using a change of variables
Introduction
The damped van der Pol is the original type of system studied in chapter 4. We
there show that this system has a contracting behavior as it converges to a single
trajectory. Section 5.4 studies cases when this convergence can be proved to be
exponential using Contraction Theory with the canonic variables (x, i). Here, using
a change of variables, we are able to refine this result using again Contraction Theory.
5.5.2
Change of variables
We are studying the following previously introduced system:
+ (k + aX2)± + w2 x = u(t)
(5.15)
When studying van der Pol oscillators of the form z + a(x 2 - 1)± + w 2 x = 0, a
useful change of variable is (x, ±) 4 (v, w) with v = x, and w
-x + _ +
which leads to
{ba
i) =
w(WW -
y,
V + V
. This formulation of the equations creates two
distinct variables whose dynamics act in different time domains for a / 0(1). For
example for a > 1, v can be seen as the fast variable, whereas the changes in w occur
on a time scale that is ' slower than for v. This is useful for large or small values of
a as it allows to treat the variables separately, thus considering for example the slow
variable as constant with respect to the fast transitions.
Inspired by this "slow/fast" change of variables, let us introduce the following
change of variables for our system:
x
= (x, )
x=(x,
=
y) with y
k
x3
The system (5.15) is equivalent to the following system in (x, y)
{
*
(y -
XW2X+
59
k)
±
=-X +
+ a
3
a
So if the system
k
X3
a(Y
X)
3
(5.16)
_W2X
a
Y
is contracting -that is, whatever time dependent input is added to the system (5.16),
the system converges exponentially to a single trajectory- then a fortiori, the system
(5.15) is contracting.
5.5.3
Contraction study
The Jacobian of the system (5.16) is
-a(x2
+
2
W
ae
Sa2(X2 + k)
_1
a
k)
a
2
0
W2
)
The two eigenvalues of the symmetric part of J in this base (the canonic base) are
always of opposite sign, so to study contraction, we need to find a metric.
Let us introduce a general constant
E
matrix linked to the corresponding metric
M by M = E T
a b
can write
c d
I ) and we
ad-bc
d
-b
( -c
The generalized Jacobian F then equals
F = OJE-1
a(ad -bc)
Z2(x
a b)(
C d )
+
2
a2
k)
0
-iw2
)(
d
-c
-b
a
)
which gives us
1
a(ad-bc)
(
-(ad a 2 (x 2 + k) + bd w 2 + ac a 2 ) ab a 2 (x 2 + ) + b2 2 + a2 a2
-(dc a 2 (x 2 + Z)+ d2W2 + c2 a2) bc a 2 (x 2 + -) + bd w2 + ac a2
which, to simplify the formulae, we write as
F
_1 a -I
(
F F
a(ad -bc) \
f12
-fi
-
f21
f 22
)
We want the symmetric part of this matrix to have its two eigenvalues always
fl2 - f21
- 2fii
strictly negative. This is true if ad - bc > 0 and if
has its
(
fi2
-
f21
2f22
)
two eigenvalues always strictly negative. The second condition is equivalent to the
second order equation (A+2f, )(A -2f
22 )-(f
60
12 -f
21
)2
2+2(f, -f22)A-4fn/22
)
(f12
-
f21)
2
= 0 have its two roots always strictly negative. Thus we need to have
0 and -4f11f22 - (f12 - f21) 2 > 0. The first inequality is equivalent to
(ad - bc)a (2 + ±)> 0 - ad - bc > 0.
So we end up with the two following condition for the system to be contracting:
fli -
f22
>
2
{
ad - bc> 0
4f11f22 + (f12 -
f21)
2
< 0
The second condition leads, after a certain amount of computation and manipulation, to the following second order inequality in the variable (x2 + k)
a 4 (ab + cd) 2 (x 2 +
+2a
2
+[(b
2
k)2
2
(ab + cd)[(b + d2 )W2 + (a 2 + c2 )ca2](X2 + k)
+ d2 )W2 + (a2 + c2 )a2]2 - 4W2a 2 (ad - bc) 2
J
<0
which implies (as a 4 (ab + cd) 2 > 0) that the value of (X 2 + k) has to be between the
roots of the second order equation.
The constant term of this second order equation is positive as it is also equal to
4(bd w 2 +ac G 2 ) 2 + ((b2 - d2 ) 2 +(a 2 - c 2 )a 2 ) 2 . Thus the two roots of this equation are
of the sign of -2a 2 (ab+cd)[(b2 +d 2 )W 2 + (a 2 +c 2 )a2], that is of the sign of -(ab+cd).
Thus, if we want the preceding second order inequality to have a possible solution,
as (2 + I) > 0, we need to have -(ab + cd) > 0.
Again after some computations, that simplify well though, we obtain the two roots
of this second order equation:
2w lad - bcj
a lab+ cd|
(b2 + d2 )W2 + (a2 + c2 )a2
a2(ab+cd)
Thus the contracting region is defined by
equality:
k
a
(b2 + d2 )W2 + (a2 + c 2 )a2
a2(ab + cd)
k
a
2
satisfying the following double in-
2w |ad - bc|
a |ab+ cd|
2
2
(b2 + d2 )W 2 + (a 2 + c )a
a 2 (ab+
cd)
2
2w |ad - bcj
a lab+cd|
To determine how to have this contraction region as large as we want, let us set
a positive real A as big as we want, and define the contraction region desired by
{x such that x2 < A}.
Thus we want the left hand term of the last double inequality to be negative or
zero, and the right hand term to be bigger than A.
61
One way of achieving this is to define (a, b, c, d) and k such that they satisfy
4w |ad - bc|
= A and
a |ab+ cd|
(b2 +
k
a
d 2 )w 2 + (a 2 + c 2 )a 2
a2(ab + cd)
2w |ad - bc|
c lab+ cd|
-the condition ad - bc > 0 has to be satisfied too.
We then obtain that the contraction region is the one desired, as it is defined by
0 < x 2 < A. (4)
Let us give an example of simple values of (a, b, c, d) and k that satisfy all the
conditions desired:
First let us set b = 0,c = -,
and a = A which implies, if d > 0, that
A, ad-bc = id > 0, and ab+cd=-wd < 0.
Iab+cdl
4
4w Iad-bcl
a
We now need _ ka
_
2
2
2
2
+(a +c )0
(b2 +d 2 )w
a2 (ab+cd)
which leads to k = a (dg +
_2ad-cl
a
+ w)
(
-
-+
ab+cdl
d2 W2 +( A 2
++2
A2 = 0
a 2 (wd)
a
(9. The function f (d) =
for d E R+ is first decreasing then increasing, its minimum value being 2
Thus the value of
k = a(2
(
+
;
+
a.
determines the minimum value that k can take, which is
-
a2(1 +
ford
). k can then take any value su-
perior to its minimum by determining the matching d.
Thus for any B fixed and any region defined as IxI < B, we can find a metric
in which the system (5.15) is contracting for any k > a (2
(=-tk
J34
16
w
2
C
B2\
2 2
This
B 20
metric is M = ETE with
4
0 ), d being any strictly positive number, its
d
value is linked to the value of k.
This result refines the one obtained in the previous section: the system converges
exponentially to a single trajectory in any bounded region, provided that k is superior
to a certain minimum value. It is interesting to note that this minimum value does
not diverge as B goes to infinity -and is even minimum for B tending to infinity.
4 -Of course,
more precisely we want 0 < x 2 < A, which can just be achieved by taking k slightly
bigger than the value defined here.
62
5.6
Weak Contraction study of the damped van
der Pol
5.6.1
Introduction
The result of the previous section, which leads to a minimum value of k which is
minimum for B tending to infinity, made us feel that a more general result could be
derived.
B32a
We first remarked that for large B, we had d ~
4B
and
E~
4
22
-
4w
4
(
which suggested that taking 2y instead of y as the second variable
1,
s
B2
\
tk
would simplify the calculus. It actually does simplify a little the formulae, but does
not change the reasoning and the different stages of the calculus. We obtain the same
result with the same condition on k.
But, at the beginning of the calculus one interesting thing appears: With this new
second variable, the Jacobian in the canonic base is semi-contracting, and thus we
can carry the weak contraction analysis introduced in section 3.2.3.
5.6.2
Weak contraction study
We consider the system
+ (k + ax2)± + w2 X
u(t)
(5.17)
o x3
k
y) with y =-x + -+ w
w 3
w
(5.18)
with the change of variables
x
= (x, ±) -> x=(x,
which leads to the system
{
wy -
x7- kx
which Jacobian is J
Thus we have
d 6xy = J 6xy and d (6 xTxy)
=
2 6
xTJ,6 xy
We thus can define
0+
63
0
+ k) w)
((ax2
with J,.
(
+ k
0
We are looking for the smallest dimension (if it exists) for which the matrix
with
]T r
L0 /
L VJ
is uniformly positive definite.
We have
L0
-S -
L1
= (LO
(
-(ax
1
J0: =
)
2
ax2 + k
\(
(ax2
0
2
+ k) 2 + ax±] [w(ax + k)]
0
0
)
0
0
+ k)
-w
0
> L
0
0
+ -)J\(Lo
ax2 + k 0
~L'
/ax2 + k 0
)
Let us look at
(
(IA
T
ax2
+k
0
1
ax2 + k
L(
0
+
ax2
)
L
1
(
+±k
)
1
axx
(Lo
)T
(ax2 + k) 2 0
w(ax 2 + k)
0
-
(v
+
)(
axx
-
)T
(Li
(ax
2
(1
+ k) 2 w(ax2 + k)
0
0
+ k ) 2 + [ax± - (ax2 + k ) 2 ]2 w(ax 2 + k)[ax± - (ax2 + k ) 2]
w(ax 2 + k)[axi - (ax2 + k) 2 ]
W2 (ax2 + k) 2
(ax2
For this matrix to be definite positive we need -Sylvester's Theorem for symmetric
matrices (page 79 of [14] for example),
2 2
(ax2 + k) 2 + [ax± - (ax2 + k) ] > 0
64
which is always true, and
w 2 (ax2 + k) 2 [(ax 2 + k ) 2 + [axi - (ax 2 +
Sw2 (a2 + k) 4 > 0
k) 2] 2]
-
+ k) 2 [ax± -
a 2 (ax 2
(ax 2
+
k) 2] 2 > 0
which is also always true.
Thus, the second order suffices to show positive definiteness of Tr, and thus to
prove exponential convergence to a single trajectory in the whole state space for the
system (5.17).
The result that we get here is actually stronger: indeed, we have exponential
convergence to a single trajectory for the system
{xz=wy-a-
kx
whatever input u(t) is added to the system; and the system (5.17) is a particular case
with u(t) = (0, u(t)).
5.6.3
Expression of the change of variables as a
E
matrix
We can express this last change of variables as a E matrix by differentiating (5.18)
-as, as stated in section 3.2.1, E corresponds to a differential change of base.
We have
1
6x
kx
x( 6
6w
+
3x 2 6X + (
+w
0\
/
2
i
6x\
6)
-06X
0
1 2
-2ax±-w2 -(k + ax2 )), the desired semi-contracting
generalized Jacobian F = (O + EJ)9 1
and we get, with J =
F=
(
200)
+
k
ax
-> F = (
-(2ax
+w
-(k + ax2 ) W
-W
65
0)
2
)
-(k +ax
2
)J
-(k +ax
2
)
66
Chapter 6
Proved synchronization behaviors
of combinations of van der Pol
oscillators
In this chapter, we present several types of combination of van der Pol oscillators, for
which we can prove, using the results of chapters 4 and 5, that they synchronize the
way they do in simulation.
6.1
Synchronization of van der Pol oscillators
6.1.1
Tuning of two van der Pol oscillators
The result stated in section 5.6.2 enables us to prove that, if a van der Pol oscillator
has, as an input, a velocity differential with respect to another identical independent
van der Pol oscillator, the first van der Pol will converge exponentially to the second
van der Pol.
Indeed, consider the following system
1+
with (x1(0), 1(0), x2(0),
bi 22
0.
{i
(t) = d 2 (t),
a(X2 - 1)± + W2x 1 = ak(±2 - ±i)
i2(0))
(6.1)
given, a > 0, and X2 defined by x 2 + c(x
z1+a(x2-1).1+w2 XI
=
-
1)±2 +
0} is a particular solution of this system;
and as its equation can be rewritten as
i+
±!+
k -
)
+
2
x 1 =kx
2
we know that for k > 1, this system converges exponentially to a single trajectory.
So this trajectory has to be the particular solution, which proves that the van der Pol
67
(1) will converge exponentially to the van der Pol (2).
Now let us derive a physical explanation so as to get an intuition on the behavior
of such a system. A van der Pol is not contracting as it tends to a limit cycle (see
the last paragraph of section 3.3.2 for a more detailed explanation). The velocity
feedback here can be interpreted as an energy input or withdrawal from van der Pol
(1), depending on where it lies on the limit cycle compared to the van der Pol (2).
This makes the point representing the van der Pol (1) on the limit cycle (in the (x, i)
phase plane) speed up or slow down to get in phase with the point representing the
van der Pol (2). An example is shown with this phase plane view on figure (6-1).
4
4
2
0
t= 11
0
C\j
0
-2
-4
-2
I= 0
-2
t 0
-4
-
X
0
x1
2
-4
-4
4
4
-2
0
x2
2
4
4
t= 11
20
2
t= 14.4
0
-
. .t.11
t =14.4
c'0
-
-2
-4
_4
-2
0
x1
2
-4
-4
4
4
4
2
2-
0
X
-4
-4
0
x2
2
4
0
_0
0
-2 -
-2
CM'
X
t=14.4
-2-
t =19
t = 14.4
t = 19
-4
-2
0
x1
2
-4
4
-2
0
x2
2
4
Figure 6-1: Phase plane view of the system plotted as a dotted line on figure (2-2).
The top two plots are showing the evolution of the two van der Pol oscillators from
time 0 to time 11 (times in seconds). The middle ones from time 11 to time 14.4
(going roughly from right to left). And the bottom ones, from time 14.4 to time
19 (roughly from left to right). We see that at time 11 vdP(1) is late compared to
vdP(2), and ends up a little in advance at time 14.4. At time 19 the two van der Pols
are oscillating in phase on the limit cycle.
68
Let us remark at this point that adding a position differential to the velocity
differential would give us the same result. Indeed, x1 verifying
j1 + a((X2
-
1)>i + W2 x1 = ak(2-
+ 3(x 2 - X1 )
(6.2)
with the same equation for X2 as the one of the beginning of this section, and #3> -W2
converges to the same desired particular solution, as equation (6.2) is equivalent to
the following contracting expression:
zi + a(Xj + k - 1)-i + (w2 + #)xi = ak±2 +
6.1.2
& 2
Synchronization of n + 1 van der Pol oscillators
Let us consider the following system:
zi
X2
+ a(X2 - 1)±i + w 2 x1 = k(z 2
+ a(X2 - 1)±2 + w 2 x 2 = ak(±
-
z2)
-
(6.3)
I n+ a(Xz
-
2
1)+n + w xn = ak(in+1 - i+ )
zn+1 + a(x +2
-
1)in+1 + W 2 Xn+1 = 0
If we consider the last two equations, (n + 1) and (n), and apply the same reasoning
as in the preceding section, we prove the exponential tuning of van der Pol (n) to van
der Pol (n + 1). We then can apply the same reasoning to the two equations (n) and
(n - 1), which proves that van der Pol (n - 1) tunes to van der Pol (n) exponentially,
and so forth until we reach van der Pol (1). We thus obtain that the n van der Pol
oscillators x1 , x 2 , --- , Xn all converge exponentially to van der Pol Xn+l, with any
initial conditions for the (n + 1) equations.
This can be expressed by saying that the first 1 to n equations of system (6.3) is a
hierarchy of contracting systems, and is thus a contracting system, and thus converges
exponentially to its particular solution x1
6.2
=
=
=n+-
...
Synchronization using an Observer
Let us consider the following van der Pol oscillator
z + 00
2 -
1)
+
w 2x
=
0
and assume that x is measured and v = ± is to be estimated.
We can then define a reduced-order observer for this system by:
{
v+
V
+a2k
-
2 + k
a0x
-
69
=x
1>13 + w 2:r
=
0
where k > 1 and the intermediate variable V can be initialized arbitrarily.
This choice implies that
a(X-
1)
+ ak(i -v) ±w2
= 0
Thus the equation for the observer contains the actual v as a particular solution. The
Jacobian of this equation being -a(x 2 + k - 1) < 0, this proves that the estimate i
converges globally exponentially to the actual v.
This observer can be used to get the synchronizations exposed in section 6.1 in
the case of unknown velocities. Indeed, in this case, the feedback can use the velocity
estimates determined by the observer, and the synchronization will still occur.
For example, in the case of subsection 6.1.1, if we define
{2
{±
1=
+ cikx 1 and V1 + ce(xl + k
2+
akX2 and 02 + oj
+ k
-
1)'
1
+ w2 x 1
2
1)X 2 + W x
2
0
=0
with V1 and V2 initialized arbitrarily, the input u(t) to van der Pol (1) so that it tunes
to van der Pol (2) is given by u(t) = ak(i 2
-
01)-
For the system exposed in subsection 6.1.2, the use of the observer simply creates
supplementary stages in the hierarchy which is now of 2n + 1 systems: in the input
of equation i, the term ij 1 creates the i + 1 supplementary stage in the hierarchy,
and, from the separation theorem [9], the term i does not perturb the convergence.
6.3
6.3.1
Operations with van der Pol oscillators
Addition of two van der Pol oscillators
Considering two van der Pols
I~~
x
+oj
' 2 +)0
_i+
1),± ±w 2 X1 -0
-1)± 2 +w 2 x 2
(6.4)
we can define the right hand side input to a third van der Pol so that it converges to
the sum of the two first ones.
Indeed, if we define the desired sum s =x 1 + X 2 and have
3 + a(X2 + k - 1)i
3
+ W2 x3
+ a(s2
+ k - 1)s + w 2 s
we know that x 3 will converge to s (for k > 1). This is equivalent to having u(t)
+
f(s2+k -)
-ozkz 3as an input to the third van der Pol {i 3
3a(x
-1): 3 +w 2 X 3 }.
70
Let us simplify u(t) using (6.4):
u(t) = (zi + -2) + C[(XI + x2 )2 + k - 1](±1 + ±2) + w 2 (xi + x 2 ) - ak±3
= (21 + w 2 x 1 ) ± (z2 + w2 x 2 ) + c[(xi - 1) + (2j - 1) + 2x 1x 2 + k + 1](±i + x 2 ) - ak,
=a(- 1)±2 + (X2 - 1)±i + (2xix 2 + k + 1)(zi + i2)] - ak±
3
-> u(t) =
4-[ix 2 (X1 + X 2 )+ k(xi + x 2 - X 3 )]
Thus, we have proven that if
~3 ±jx- )±±wX
3
=o-[XIX2 (XI +X 2 )±
dt
k(xl-HX 2 - X3 )]
van der Pol (3) will converge exponentially to the sum of the two inputed van der
Pols (1) and (2), independently of the initial conditions of the three oscillators.
Similarly the right hand side to be inputed to a van der Pol (3) to obtain the
difference between van der Pol (1) and (2) is
dt
a(t) = a+[-xix
2 (xi - x 2 ) + k (x 1
6.3.2
-
z2-
x3)]
Addition of n van der Pol oscillators
We can generalize the previous result to determine the input to a van der Pol (n + 1)
so that it outputs the sum of n van der Pols.
Let us consider an input of n van der Pols
2 + a(X2 - 1)±i + w 2 x=
0
2
+(xi-1)± 2 +w x 2 =0
2
z+ a (zn - 1)-'n +wXn
(6.5)
= 0
If we define u(t) = + a(s 2 + k - 1)a + w 2 s - ak n+1 with s = En
±n+1 +
a(x~± 1
-
X,
we know that
1)'n+1 + w 2xn+1 = U(t)
will converge exponentially to the sum of the n inputed van der Pols, independently
of the initial conditions of the n + 1 oscillators (for k > 1).
Although the simplification of u(t) is a little tedious, it is of interest for practical
applications:
u(t) =
, + a(
p=1
ZXP)
2
+ k
-
1](Z:P) + W2 E
p=1
p=1
71
p=1
-
k
n
=
3(zp -- w xp) +
2
n
n
-1) +
Z[1(x
p=1
p=1
XpXq
+ k + n - 1](
ppAq
p)
-
I
p=1
Using (6.5) we get
n
u(t) = c[(x
1)
-
q
+ (Exxq
+ k
+ n - 1)(E p) - k n+1]
p=1
p7!q
pAq
n
u(t)
=
(]
x>Vq
+-
u(t) = a {d[
xpxqr+
x x
+
k(
pq
k(Z
p
-
in+1)]
p=1
ppq
ppq
xp - xn+1)] +
E
Xpxq.r}
pAq~r
p=1
This result can be extended to a system having (n - p) inputed van der Pols
-instead of n here- and p van der Pols that computes interesting quantities -instead
of one here.
6.3.3
Multiplication by a constant
We can apply the same reasoning to get the input u(t) to a van der Pol (2) so that
its output is A times an inputed van der Pol (1). This is mathematically expressed
by finding u(t) so that x2 converges Ax 1 with
5z
X2
+ o(x2 - 1)ii + w2 xI = 0
+ a(x2 - 1)_2 + w 2 x 2 = u(t)
We just have to compute u(t) = Azi + a(A2 x2 + k - 1)A1i +w 2 Ax 1 - ozk± 2 which leads
to
u(t)
=
c[A(A2
+ k(A±i
+)i
-
-
x2 )]
Let us remark that for A = -1, u(t) = -Ok(± 1I+
2), which is a simple form of
input to a van der Pol (2) to get the opposite of an inputed van der Pol (1), regardless
of the initial conditions of both systems.
72
6.4
Extensions
6.4.1
Van der Pol as a pendulum
More generally, the results of chapters 4 and 5 enable us to determine the input
needed to make a van der Pol oscillator behave like an oscillating pendulum without
damping.
Indeed, {xi(t) = x 2 (t),
± 2 (t)} is a particular solution of the following
I(t) =
system
z + a(
2-
1)i + w2 Xi
with x 2 + w x 2
I) + a(xj - 1)2
ak(z2-
(6.6)
0
which can be rewritten as
21 + a(X2 + k - 1) Ii+ w2Xi
a(X2 + k
-
1)±2
As, for k > 1, we know that this system converges to a single trajectory, we know that
the van der Pol is going to behave like the pendulum. Figure (6-2) shows examples
of such a behavior.
6.4.2
Tuning of a van der Pol to any trajectory
Actually this method enables us to make a van der Pol follow any chosen trajectory
of the type
X2
+ f (x 2 ,
2, t)
=
0 given any (x 2 (0), x 2 (0))
by inputing the following
+1+ c(xi
-
1)±i + w2 x 1
Indeed, {x1(t)
= ak(±2 -
x 2 (t), ±1 (t)
=
d1) + a (2
-
1)±2 +
w2 x 2
-
f(x 2 , d 2 , t)
(6.7)
±2 (t)} is a particular solution of equation (6.7) which
can be rewritten as
zi +
(
+ k - 1)i + w 2x1 = a(X+k- 1)'2 + w 2x 2 -f ( 2 , 2 )
and thus for k > 1 we know that this system converges to a single trajectory, so that
the van der Pol will behave as our given system (2).
Figure (6-3) gives an example of such a behavior for
f(x 2 , ±2, t) = ±i + X - cos(ln(t + 1))
73
10
5
5
0
0
*0
-
A
-5
-5
)
10
20
30
-10
40
0
10
20
time
5
40
5
r/
x
0
10
20
30
\
:
}
-5
40
'
-
0 0
-5
30
time
10
0
time
II
20
}
;
'
30
40
30
40
time
10
I:k
_0
0
x
0
.7'
1**
-5
J.
-50
5
0
C'xj 5
0
'
'
'
10
20
30
-10
40
time
0
10
20
time
Figure 6-2: Convergence of a van der Pol oscillator x1 to an undamped pendulum X2
1, k = 2).
(a - 1, w
74
2
2
1
0
0
x
-2
-1
-2
)
50
100
-40
0
20 0
150
50
time
100
150
200
150
20 0
150
200
time
2
1
.5
-a
c'jx
1
-2
)
50
100
150
1
0
20 0
0
50
time
4
c-'J
2
0
-0
CMJ
2
x
0
-2
0
-0
0
-2-
100
time
-4
0
50
100
-6-
200
150
time
Figure 6-3: Van der Pol tuning on
(-1, 2) and various (xi(o), ±i(0))
0
50
100
time
2
i~±x
75
= cos(1n(t+ 1)) with (x2 (0), iJ2(0))
6.4.3
Generalization
The generalizations made in chapter 4 enable us to prove exactly the same behaviors
as the ones shown in the previous two subsections with any oscillator of the form:
i + [P(x) - a]- +w 2 x = 0
/37 2 , with Vn
#nx
with P(x) =
#3
> 0 and not all the
#,
equal 0, and a > 0.
Figure (6-4) shows for example the tuning of two oscillators of the type:
+
+
4(x
+ w2x =0
6 -- 1)
by inputing a velocity difference from one to the other.
4
4
2
2
0
-2[
-4
)
.
-2
20
40
-4
60
0
20
time
40
60
40
60
40
60
time
2
4
0
0
Cj
C"]
x
X
-2
0
-2
-4
)
20
40
-4
60
0
20
time
time
5
4
2
N"
X
0
0
~0
X
0
X -2
-50
0
20
40
-4
60
0
20
time
time
Figure 6-4: Tuning of two oscillators of the type: , + a(x
6.4.4
4
+ X6
-
1)z + w 2 x = 0
Application of contraction to general control design
Let us remark at this point that some similar manipulations can be used to make
any system of the form {i + h(±i,x 1 )} behave exactly the way we want using for
76
example the contraction property of the system
{ +
k+ + w2 x}.
The desired trajectory being described by the equation
x 2 + f (x 2,± 2 , t) =0 given any (x 2 (0), ±2(0))
this can be done by creating the following input to the system (1):
±i
) + w2 (x 2
+ h(±i, xi) =k(± 2 --
xi) + h( 1i, xi)
-
-
f
(X 2 , ±2, t)
Indeed this equation can be rewritten:
+k±i+ w2x 1
+i
k± 2 + w 2x 2
=
-
f (x 2 ,
2 , t)
which has the following particular solution:
{Xi(t)
x 2 (t), : I(t) =
2
(t),
±1
+ f (xi,±1, t) = 0}
and as we know that the system (1) will converge to a single trajectory with such an
input, this proves that it will behave as desired. Of course here we need to know at
each time {xi(t), ±I(t) and h(I(t), xi(t))} contrary to the previous cases where we
only needed to know the velocity of the system we were trying to control to make it
behave the way we want.
Figure (6-5) shows an example for
6.5
±2
+ (x 2
-
1)2±2
+ X2
=
sin(t).
Feedback Combination of two van der Pol oscillators
The following feedback combination of two contracting systems of the form (4.1) is
inspired by the result stated in section 3.2.4 :
f
zi +
a(+i + k - 1)
s2 + a(xz + k - 1)
2
+ w2 x =
± w2x2 = -ak
1
(6.8)
This system is equivalent to the following feedback combination of two van der
Pol oscillators:
{
±1+
c(xi - 1)
+ a(X
i
+ w 2 Xi = ak(±2
- 1)±2 +
2
-2
x2
=
-
-ak(±i +±±2)
(6.9)
As it can be seen in figure (6-6), the simulations do show a contracting behavior
for this feedback combination, but in this case the particular solution is (0, 0). This is
an illustration of the fact that contraction theory separates the convergence problem
from the limit of the convergence.
77
4
2
0
N.
x
0 I
x
'N
*\
-Z '
0
10
20
2
0
-2
30
I
)
10
20
time
30
time
2
1
0
1
CQi
x
0 I
0
.
05
_0
C\jx -1
Aw
M-
-2
20
10
30
0
10
time
20
30
20
30
time
10
C~j
x
x
0
2
5
~0 0
0/
0
10
20
30
0
10
time
time
Figure 6-5: Tuning of system (1) on
78
'2
+ (x 2
1)2
2
+ x 2 = sin(t)
10
5
0
0
0
-20-40
-10
-20
6
40 t20 60
80
i
80
1 00
x
-5
-101
0
20
40
60
80
100
60
80
10 0
60
80
100
time
time
10
4
2
5.-
0
c\j
x
-2
-5--
-4
)
1A
20
40
60
80
.10
10 0
20
40
time
1n
k
0
0
Coj
0
time
0
x
_0
0
_0 -10[
-10
0
20
40
60
80
100
0
time
20
40
time
Figure 6-6: Evolution of system (6.8) with a = 1, w = 1, and k = 2, and various
initial conditions.
79
Such a result has to be related to the following observation: if we do the following
feedback combination of two van der Pol oscillators:
{
zi + o(x?
X 2 + a(x2
-
1)±i + w 2 xI =ak(±2 - 'I)
1)±2 + w 2 x 2 = k(I - ±2)
(6.10)
the two van der Pol oscillators synchronize and end up oscillating together, with the
same trajectory (thus following the particular solution x1 = x 2 ). Figure (6-7) shows
an example of such a synchronization.
A.-
4
2
2
0
_0
......... .. .-
0
-2
-4
0
10
20
30
-2
-4
40
0
10
time
4
........ ......
..........
. ......
......
-2
0
30
40
30
40
0
_0
...
c\J 0
.....
-2
--I
10
20
30
40
0
10
0.5
0
4
C'J
2
-0-0.5
0
20
time
6
X
40
2
time
C\i
30
4
2
-4
20
time
10
20
30
-1
40
time
0
10
20
time
Figure 6-7: Evolution of system (6.10) with a = 1, w = 1, k = 2 and initial conditions (3, 0, -2, 1).
The interest here is that it appears, comparing system (6.9) and system (6.10),
that we have a feedback combination of two van der Pol oscillators, that can switch
from a synchronized oscillation to zero, and vice versa -regardless of the initial conditions of the two oscillators- just by changing the sign of a gain.
80
Chapter 7
Conclusion
As Contraction is a property independent of the initial conditions of the system,
Contraction Theory appears to be a very useful tool to study a system's behavior
that does not depend on the initial conditions. Thus, trying to apply this theory to
the behaviors studied in this thesis, which have the property to happen independently
of the initial conditions of the systems, is definitely of interest.
A thorough study of Contraction Theory, to get insight in what the mathematical
formulae stand for, was very useful to be able to achieve this goal. It was a struggle to
show the contraction property of the damped van der Pol oscillator; but once this was
achieved, the theoretical proof of synchronization behaviors of systems of van der Pol
oscillators, was straightforward. Along the way, some properties of systems, derived
from various use of Contraction Theory, were found, which contributes to show the
efficiency of this new theory.
81
82
Bibliography
[1] Berge, P., Pomeau, Y., Vidal, Ch. (1988). L'ORDRE DANS LE CHAOS.
Hermann, Paris.
[2]
Huerre, P. (1997). MECANIQUE DES FLUIDES. Ecole Polytechnique, France.
[3] Khalil, H. (1995). NONLINEAR SYSTEMS, 2ND ED. Prentice-Hall.
[4] Klinkner, L. (1999).
Two NEW CONTROLLER CONCEPTS FOR RHYTHMIC
MOTION GENERATION. Master Thesis, University of Stuttgart, Germany.
[5]
Lakshmikantham, V., Leela, S. (1969). DIFFERENTIAL AND INTEGRAL
INEQUALITIES; THEORY AND APPLICATIONS.
Academic Press, New York and
London.
[6] Leonov,
G.A.,
Burkin, I.M., Shepeljavyi,
A.I.
(1996).
FREQUENCY
METHODS IN OSCILLATION THEORY. Kluwer Academic Publishers.
[7] Leonov,
G.A.,
Ponomarenko,
D.V.,
Smirnova,
FREQUENCY-DOMAIN METHODS FOR NONLINEAR ANALYSIS.
V.B.
(1996).
AP-
THEORY AND
PLICATIONS. World Scientific.
[8] Lohmiller, W. (1999). CONTRACTION ANALYSIS OF NONLINEAR SYSTEMS.
PhD Thesis, Department of Mechanical Engineering, Massachusetts Institute of
Technology.
[9] Lohmiller, W., Slotine, J.J.E. (1998). ON CONTRACTION ANALYSIS FOR
NON-LINEAR SYSTEMS. Automatica, Vol. 34, No. 6, pp. 683-696.
[10] Luenberger, D.G. (1937). INTRODUCTION TO DYNAMIC SYSTEMS: THEORY, MODELS, AND APPLICATIONS. John Wiley and Sons, New York.
[11] Merlin, X. (1995). METHODIX -ANALYSE, ALGEBRE. Ellipses, Paris.
[12] Phillips, H.B. (1934). DIFFERENTIAL EQUATIONS. John Wiley and Sons.
[13] Salencon, J. (1997). MECANIQUE DES MILIEUX CONTINUS. Tome 1, Ecole
Polytechnique, France.
83
[14] Slotine, J.J.E., Li, W. (1991). APPLIED NONLINEAR CONTROL. Prentice-
Hall.
[15] Strogatz, SH. (1994). NONLINEAR DYNAMICS
AND CHAOS - WITH APPLICA-
TIONS TO PHYSICS, BIOLOGY, CHEMISTRY, AND ENGINEERING.
Addison- Wesley
Publishing Company, Reading, MA.
[16] Strogatz, SH., Stewart, I. (1993). COUPLED OSCILLATORS AND BIOLOGICAL SYNCHRONIZATION. Scientific American, 12/93: 102-109.
[17] Szarski, J. (1965). DIFFERENTIAL INEQUALITIES. Polish Scientific Publishers,
Poland.
[18] Vidyasagar, M. (1978). NONLINEAR SYSTEMS ANALYSIS. Prentice-Hall.
[19] Walter, W. (1970). DIFFERENTIAL
Verlag, Berlin, Heidelberg, New York.
84
AND INTEGRAL INEQUALITIES.
Springer-