ROBUST CONTROL PROBLEMS OF VORTEX DYNAMICS IN SUPERCONDUCTING FILMS WITH GINZBURG-LANDAU
advertisement

ROBUST CONTROL PROBLEMS OF VORTEX DYNAMICS IN
SUPERCONDUCTING FILMS WITH GINZBURG-LANDAU
COMPLEX SYSTEMS
AZIZ BELMILOUDI
Received 10 December 2004; Accepted 1 March 2005
We formulate and study robust control problems for a two-dimensional time-dependent
Ginzburg-Landau model with Robin boundary conditions on phase-field parameter,
which describes the phase transitions taking place in superconductor films with variable
thickness. The objective of such study is to control the motion of vortices in the superconductor films by taking into account the influence of noises in data. Firstly, we introduce
the perturbation problem of the nonlinear governing coupled system of equations (the
deviation from the desired target). The existence and the uniqueness of the solution of
the perturbation are proved as well as stability under mild assumptions. Afterwards, the
robust control problems are formulated in the case when the control is in the external
magnetic field and in the case when the control is in the initial condition of the vector
potential. We show the existence of an optimal solution, and we also find necessary conditions for a saddle point optimality.
Copyright © 2006 Aziz Belmiloudi. This is an open access article distributed under the
Creative Commons Attribution License, which permits unrestricted use, distribution,
and reproduction in any medium, provided the original work is properly cited.
1. Introduction
The aim of this contribution is the study of robust control problems to describe the phenomenon of vortex structure in the superconducting phase transitions, using the timedependent Ginzburg-Landau (TDGL) complex superconductivity model. Such model
was derived by Gor’kov and Eliashberg in [28] from the microscopic BCS (BardeenCooper-Schieffer) theory [4] for a superconductor with paramagnetic impurities. It involves the real vector potential U for the total magnetic field and a complex phase-field
variable φ so that |φ|2 = φφ (φ is the complex conjugate of φ) gives the relative density of
the superconducting charge carriers (Cooper pairs of electrons), which varies between 0
in the normal phase and 1 in the superconducting phase. The need for φ to be complex
is associated with the macroscopic quantum nature of superconductivity. Here we will
be connected with the response of a superconducting material to an applied magnetic
field under isothermal conditions below its critical temperature Tc (the transition from
Hindawi Publishing Corporation
Abstract and Applied Analysis
Volume 2006, Article ID 26724, Pages 1–43
DOI 10.1155/AAA/2006/26724
2
Robust control of Ginzburg-Landau models
normally conducting to superconducting is usually associated with critical temperature).
The time evolution of (U,φ) is then governed by the following system:
ηρ
∂φ
− iηκ div(ρU)φ + b(U) · ρb(U) (φ) + ρG(φ) = 0 in ᏽ = Ω × (0,T),
∂t
∂U
+ curl ρ curl(U) − ∇ div(ρU) + ρ b(U)(φ)φ = curl(ρH) in ᏽ,
ρ
∂t
(1.1a)
subjected to the Robin-type boundary conditions
1 ∂φ
= μφ,
κ2 ∂n
U · n = 0,
curl(U) = H
in Σ = ∂Ω × (0,T),
(1.1b)
in Ω,
(1.1c)
and the initial conditions
φ(0) = φ0 ,
U(0) = U0
where the operator b (the covariant derivative) and the function G are defined by: b(U) =
((i/κ)∇ + U), b(U) = ((−i/κ)∇ + U) and G(z) = (|z|2 − 1)z. The domain Ω is an open
bounded domain in R2 with Lipschitz boundary ∂Ω, n is the unit normal to the surface
of the superconductor Γ = ∂Ω and μ is an arbitrary real number (the boundary condition
is appropriate for the superconductor interface with vacuum or an insulator if μ = 0 and
for the superconductor interface with normal metal if μ = 0). (·) (resp., Ᏽ(·)) denotes
the real part (resp., the imaginary part) of the quantity in (·) and curl denote the curl
operators defined by (on the (x, y)-plane)
curl(φ) =
∂φ ∂φ
,−
∂y ∂x
T
∂u
∂u
curl(U) = 2 − 1
∂x
∂y
(φ is a scalar)
(1.2)
U = u1 ,u2 is a vector .
H is the applied magnetic field, η is the nondimensional diffusivity and ρ > 0 is a smooth
function characterizing the vertical shape of the superconducting films and satisfying the
following hypothesis
ρ ∈ C 1 (Ω) such that ρ0 ≤ ρ ≤ ρ1 and |∇ρ| ≤ ρd ,
(1.3)
where (ρ0 ,ρ1 ,ρd ) are nonnegative constants.
The positive constant κ is the Ginzburg-Landau parameter with κ = λ/ξ, where ξ is
a coherence length describing the size of thermodynamic fluctuations in the superconducting phase, and λ is the London penetration depth describing the depth to which an
external magnetic field can penetrate the superconductor.
The parameter κ determine the
√
√
type of superconducting material: κ < 1/ 2 describes type-I superconductors, κ > 1/ 2
describes type-II superconductors.
Aziz Belmiloudi 3
Applied magnetic field
H
Type-I
Type-II
Huc
Normal state
Hc
Mixed state: vortices
Superconducting state
√
1/ 2
Hlc
κ
Ginzburg-Landau parameter
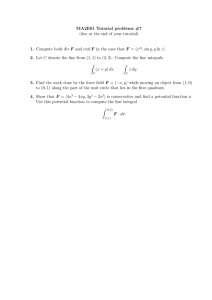
Figure 1.1. The reaction of a superconducting material.
Most applications of superconducting materials involve type-II superconductors in
high magnetic fields. It is known that for the type-II superconductors, there is a critical
magnetic field which splits into a lower critical field Hlc and an upper critical field Huc
(cf. Figure 1.1). For the magnetic fields below Hlc the material is in the superconducting
state and for magnetic field above Huc the material is in the normal state. For the magnetic fields between Hlc and Huc the material is in the mixed state. This mixed state is
described by physicists as follows: around some isolated points (called vortices, which are
most commonly arranged in a hexagonal arrangement, see Abrikosov [1]) inside the material, the superconducting property is destroyed and the magnetic field become stronger
in the nearby regions surrounding these vortices. While elsewhere, the superconducting
property is still dominant and the field magnetic is excluded. Moreover, the motion of
the vortices depends highly on the magnetization processes of the material (this is the
result of the “Lorentz force”—that is more than anchorage forces of vortices and causes
the displacement of the vortex—on the magnetic flux line carried by the vortex due to the
transport current, e.g.). The motion of the vortices is undesirable, because this motion
dissipate energy and leads to an electric field. So it is very interesting to study the applied
magnetic in order to prevent their motion.
The objective of a robust control theory, which generalizes optimal control theory,
is to compensate the undesirable effects of system disturbances through control actions
such that a cost function achieves its minimum for the worst disturbances, that is, to find
the best control which takes into account the worst-case (maximal) disturbance. More
recently robust control frameworks have been the object of numerous studies either from
a theoretical or from a numerical point of view to some classes of infinite (or finite)dimensional linear or nonlinear systems (see, e.g., [5–8, 10, 18, 24–26, 29, 31, 36, 37, 40]
and the references therein).
Various problems associated with the Ginzburg-Landau models in superconductivity
have been studied these last years (the literature on such model is vast, see, for example,
[9, 11–13, 15, 17, 19–22, 30, 38, 39] and the references therein). For the optimal control
4
Robust control of Ginzburg-Landau models
problems associated with the TDGL models, we can mention [14] in which the authors
studied the control of the vortices in superconducting films through the external magnetic field. Here, we consider a robust control problem, for the TDGL models with a
Robin boundary condition on phase-field variable, which describes the phase transitions
taking place in superconductors films, in order to take account the influence of noises in
data. Indeed, such perturbations (noises) have the effect of impeding the ability of the
material to become superconducting.
1.1. Assumptions and notations. We denote by Vn = {U ∈ H 1 (Ω); U · n = 0 on Ω} and
Vn the dual of Vn . We denote by , Vn ,Vn the duality product between Vn and Vn . For any
pair of real number r,s ≥ 0, we introduce the Sobolev space H r,s (ᏽ) defined by H r,s (ᏽ) =
L2 (0,T,H r (Ω)) ∩ H s (0,T,L2 (Ω)), which is a Hilbert space normed by
T
0
1/2
v 2H r (Ω) dt + v 2H s (0,T,L2 (Ω))
,
(1.4)
where H s (0,T,L2 (Ω)) denotes the Sobolev space of order s of functions defined on (0, T)
and taking values in L2 (Ω) and defined by H s (0,T,L2 (Ω)) = [H m (0,T,L2 (Ω)),L2 (ᏽ)]θ ,
where θ ∈ (0,1), s = (1 − θ)m, m is an integer and H m (0,T,L2 (Ω)) = {v ∈ L2 (ᏽ) | ∂ j v/∂t j
∈ L2 (ᏽ), ∀ j = 1,m}.
Remark 1.1. (i) According to [27], we have the following embedding inequality on Vn :
2 2 U 2H 1 ≤ C U 2L2 + div(U)
L2 + curl(U)
L2 ,
∀ U ∈ Vn .
(1.5)
(ii) For v ∈ H r,s (ᏽ), the trace functions of v: ∂ j v/∂n j on Σ = ∂ Ω × (0,T) for an integer
j such that j ∈ [0,r − (1/2)] exist and satisfy ∂ j v/∂ n j ∈ H r j ,s j (Σ), where r j = r − j − 1/2
and s j = s(r − j − 1/2)/r. Moreover the functions v → ∂ j v/∂n j are continuous linear mappings from H r,s (ᏽ) into H r j ,s j (Σ) (see, e.g., [34, 35]).
If X denotes some Banach space of real-valued functions, the corresponding space of
complex-valued functions will be denoted by ᐄ and the corresponding space of vectorvalued functions, each of components belonging to X, will be denoted by X, and we use
· X to denote the norms of spaces X, X or ᐄ.
We can now introduce the following spaces: Wn = L2 (0,T,Vn ) ∩ H 1 (0,T,Vn ), En =
2
L (0,T,Vn ) ∩ L∞ (0,T,L2 (Ω)), ᐃ = L2 (0,T,Ᏼ1 (Ω)) ∩ H 1 (0,T,(Ᏼ1 ) (Ω)), Ᏹ = L2 (0,T,
2 (Ω) = {φ ∈ ᏸ2 (Ω); |φ| is bounded a.e. in Ω}.
Ᏼ1 (Ω)) ∩ L∞ (0,T,ᏸ2 (Ω)) and ᏸ∞
Remark 1.2. (i) ᐃ and Wn are continuously embedded into C 0 ([0,T],ᏸ2 (Ω)) and C 0 ([0,
T],L2 (Ω)), respectively (see, e.g., [34, 35]).
2 (Ω) is a subset of ᏸ∞ (Ω), we equipped this space by the standard
(ii) Although ᏸ∞
norm of the space ᏸ2 (Ω).
Aziz Belmiloudi 5
The weak formulation associated to problem (1.1) is then to find (φ,U) ∈ ᐃ × Wn
such that
∂φ
η ρ q dx − iηκ
Ω ∂t
− iμ
Γ
∂U
ρ
v dx +
Ω ∂t
+
φ(0) = φ0 ,
Ω
div(ρU)φq dx +
ρφq dΓ +
Ω
Ω
a.e. t ∈ (0,T), ∀q ∈ Ᏼ1 (Ω),
ρ b(U)(φ)φ v dx =
U(0) = U0
ρb(U)(φ)b(U)(q)dx
ρG(φ)q dx = 0,
ρ curl(U)curl(v)dx +
Ω
Ω
Ω
Ω
div(ρU)div(v)dx
ρH curl(v)dx,
(1.6)
a.e. t ∈ (0,T), ∀v ∈ Vn ,
in Ω.
1.2. Preliminary results
Definition 1.3. Let 1 and 2 be two arbitrary sets (whose nature will be stated precisely
at each situation) and denote = 1 × 2 .
A pair ( f ∗ ,g ∗ ) ∈ is a saddle point of the cost function J on if
J( f ∗ ,g) ≤ J( f ∗ ,g ∗ ) ≤ J( f ,g ∗ ),
∀( f ,g) ∈ .
(1.7)
Lemma 1.4. Let Ω ⊂ Rm , m ≥ 1, be an open and bounded set with a smooth boundary and
let q be a nonnegative integer. There exist the following results.
(i) H q (Ω) ⊂ L p (Ω), for all p ∈ [1,2m/(m − 2q)], with continuous embedding (with the
exception that if 2q = m, then p ∈ [1,+∞[ and if 2q > m, then p ∈ [1,+∞]).
(ii) (Gagliardo-Nirenberg inequalities). There exists C > 0 such that vL p ≤
C vθH q v1L−2 θ , for all v ∈ H q (Ω), where 0 ≤ θ < 1 and p = 2m/(m − 2θq) (with the exception that if q − m/2 is a nonnegative integer, then θ is restricted to 0).
For the proof of this lemma, see for example Adams [2].
Lemma 1.5. (i) For all z ∈ C, G(z)z ∈ R.
(ii) For all (z1 ,z2 ) ∈ C2 , G(z1 ) − G(z2 ) = (|z1 |2 + |z2 |2 − 1)(z1 − z2 ) + z1 z2 (z1 − z2 ).
Lemma 1.6. For (ϕ,u) and (ψ,v) sufficiently regular,
(i) b(u)(ϕ) = b(v)(ϕ) + (u − v)ϕ;
(ii) b(u)(ϕ) − b(u)(ψ) = b(u)(ϕ − ψ);
(iii) b(u)(ϕ) · b(u)(ϕ) = (1/κ2 )|∇ϕ|2 + |u|2 |ϕ|2 − (2/κ)Ᏽ(ϕ∇ϕ) · u.
The proof of the previous lemmas are immediate.
Lemma 1.7. For (u,v,w,X) sufficiently regular,
(i) uH 1 vL4 X L4 ≤ C1 u2H 1 vL2 + δ ∇X 2L2 + C2 (vH 1 + v2H 1 )X 2L2 , with δ
chooses suitably at each situation,
(ii) uL4 vL4 wL4 X L4 ≤ C1 u2L4 v2L4 + γ∇X 2L2 + C2 (w4L4 + w2L4 )X 2L2 ,
with γ chooses suitably at each situation.
6
Robust control of Ginzburg-Landau models
Proof. (i) By using Gagliardo-Nirenberg inequalities (Lemma 1.4, with m = 2), we obtain
uH 1 v L4 X L4 ≤ c1 u2H 1 v L2 + c2 v H 1 X 2L2 + c3 v H 1 X L2 ∇X L2 and then by
using the Young’s formula, we can deduce the result (i).
(ii) uL4 vL4 wL4 X L4 ≤ c1 u2L4 v2L4 + c2 w2L4 X 2L4 .
By using Gagliardo-Nirenberg inequalities, we can deduce that w2L4 X 2L4 ≤
c3 w2L4 X 2L2 + c4 w2L4 X L2 ∇X L2 .
According to Young’s formula, we can deduce the result (ii).
1.3. Outline of paper. The rest of the paper is organized as follows. In Section 2, we
prove the existence and uniqueness of the problem (1.1). In Section 3, we introduce the
initial perturbation problem and prove the existence and the uniqueness of the perturbation and obtain a stability result. In Section 4, we study the Fréchet differentiability of the
solution operator of the perturbation problem. This property is necessary to develop the
robust control problem. In Section 5, we study the robust control problem corresponding to obtain the saddle point of the cost function J. The functional J is depending on the
disturbance (or noise), the control and the perturbation solution in the domain Ω over
the time interval under consideration [0, T]. The robust problem is formulated in two
cases of control: firstly the control is in the external magnetic field and the disturbance is
in the external magnetic field or in the initial condition of the order parameter variable,
secondly the control is in the initial condition of the vector potential and the disturbance
is in the external magnetic field or in the initial condition of the order parameter variable. We prove the existence of an optimal solution (saddle point), to the robust control
problem under consideration, and give necessary optimality conditions. The optimality
system is corresponding to identify the gradient of the cost function that is necessary to
develop a numerical computation in order to solve the robust control problem.
2. Existence and uniqueness of the solution of the TDGL model
The following results concern the existence and the uniqueness of the solution of the
Ginzburg-Landau model with Robin-type boundary conditions on phase-field parameter
(1.1).
Theorem 2.1. For any (φ0 ,U0 ) ∈ ᏸ2 (Ω) × L2 (Ω) satisfying |φ0 | ≤ 1 a.e. in Ω and H ∈
L2 (ᏽ), there exists a unique solution (φ,U) ∈ ᐃ × Wn of (1.6) satisfying |φ| ≤ 1 a.e. in ᏽ.
Moreover, the following estimation exists:
2
2
φ2W + U 2Wn ≤ C H 2L2 (ᏽ) + φ0 L2 (Ω) + U0 L2 (Ω) .
(2.1)
Proof. The proof of this result is obtained by using the same technique as in, for example,
[14, 15]. Here, we sketch only the proof of the existence by using the method of lines.
The uniqueness is obtained by using the same technique as to prove the stability result in
Theorem 3.1.
To begin with, we introduce the following semidiscretized approximation problem: let
N ≥ 1 be an integer, let τ = T/N be the time size, t j = jτ, for j = 0,...,N. The
Aziz Belmiloudi 7
approximation problem is then to find (ϕ j ,u j ) ∈ Ᏼ1 (Ω) × Vn , j = 1,N, such that
η
Ω
ρ
φ j − ϕ j −1
q dx − iηκ
τ
− iμ
Γ
ρφ j q dΓ +
U j − U j −1
ρ
v dx +
τ
Ω
+
Ω
Ω
Ω
Ω
ρb U j φ j b U j (q)dx
ρG φ j q dx = 0,
Ω
div ρU j φ j q dx +
ρ φ j −1 b U j −1 φ j −1 v dx +
Ω
div ρU j div(v)dx =
Ω
(2.2)
ρ curl U j curl(v)dx
ρH j curl(v)dx,
tj
where (φ0 ,U0 ) is given by (1.6), and H j (·) = (1/τ) t j −1 H(·,t)dt, j = 1,N.
We first notice that the first part and the second part of system (2.2) are independent
of each other. The second part of (2.2) is a linear elliptic problem for U j with (U j −1 ,φ j −1 )
given by the previous step. By using the standard argument we obtain the existence and
the uniqueness of U j ∈ Vn . The first part of (2.2) is a semilinear elliptic problem with
respect to φ j . By using the regularity of (U j ,φ j −1 ) and a standard argument, we obtain
the existence and the uniqueness of φ j .
Prove now, by using the maximum principal, that |φ j | ≤ 1, ∀ j ≥ 1.
Let us consider the following notation: r + = max(r,0) and r − = (−r)+ and then r =
+
r − r − . Prove now that if |φ0 | ≤ 1 a.e. in Ω then |φ j | ≤ 1, ∀ j ≥ 1 a.e. in Ω. Suppose now
that |φ j −1 | ≤ 1 a.e. in Ω, and prove that |φ j | ≤ 1 a.e. in Ω. By choosing q = (|φ j |2 − 1)+ φ j
in the first part of (2.2) and by taking the real part we have then
η
Ω
ρ
2
φ j − 1 + 2
τ
+
+
Ω
dx + η
Ω
ρ
2
φ j − 1 +
τ
dx − η
Ω
ρ φ j φ j −1
+
2
φ j − 1
τ
dx
2 2
+
ρb U j φ j φ j − 1 dx
Ω+
ρ ∇φ j 2 2 dx +
2
2κ
Ω
2 2
φ j − 1 + 2 dx = 0,
ρ φ j (2.3)
where Ω+ = {x ∈ Ω | |φ j |2 − 1 > 0}. This implies (since |φ j −1 | ≤ 1)
η
Ω
ρ
2
φ j − 1 + 2
dx + η
ρ
2
φ j − 1 +
dx +
2 2
+
ρb U j φ j φ j − 1 dx
2τ
2τ
Ω
Ω
2 2
2 2
ρ ∇φ j dx + ρφ j φ j − 1 + 2 dx ≤ 0.
+
2
+
Ω 2κ
Ω
Therefore, we have that |φ j | ≤ 1 a.e. in Ω.
(2.4)
8
Robust control of Ginzburg-Landau models
Prove now some estimates. First, we take (q,v) = (φ j ,U j ) in (2.2), by using the uniform
boundness of the sequence (φ j ) j ≥1 and the discrete Gronwall’s formula we obtain the
following estimate
2 2
max φ j L2 + U j L2 + τ
j =1,n
∇φ j 2 2 + div U j 2 2 + curl U j 2 2
L
j =1,N
2 2
≤ C φ0 2 + U0 2 + H 2 2
L
L (ᏽ)
L
L
L
(2.5)
.
By taking now (q,v) = (1/τ)(φ j − φ j −1 ,U j − U j −1 ) in (2.2), by using the uniform boundness of the sequence (φ j ) j ≥1 and the discrete Gronwall’s formula, we have
τ
j =1,N
1
2 2
φ j − φ j −1 + 1 u j − u j −1 τ
2 τ
2
L
+
L
∇φ j 2 2 + div U j 2 2 + curl U j 2 2
L
j =1,N
L
L
(2.6)
2 2
≤ C φ0 L2 + U0 L2 + H 2L2 (ᏽ) .
By using (2.2), Green’s formula, the estimates (2.5), (2.6), the uniform boundness of
(φ j ) j ≥1 , and Lemma 1.4 we obtain the following estimation:
j =1,N
1
2
φ j − ϕ j −1 τ
2 1
(H 1 (Ω))
+
τ
U j − U j −1 2 2
≤ C φ0 2 + U0 2 + H 2 2
L
L
L (ᏽ)
Vn
(2.7)
.
The proof of theorem can be completed by standard convergence arguments (see, e.g.,
[32]), by taking advantage of the above estimates and by using the continuous mapping
from Ᏼ1/2+s (Ω) into ᏸ2 (Γ), 0 < s < 1/2, see, for example, [34, 35] (to pass to the limit in
term Γ ρφ j q dΓ).
Remark 2.2. Throughout the paper, we suppose that the hypotheses of Theorem 2.1 are
satisfied, to ensure that the solution of problem (1.1), is in (ᐃ ∩ ᏸ∞ (ᏽ)) × Wn .
3. Studying the perturbation problem
In the following, the solution (φ,U) of problem (1.1) will be treated as the target function. We are then interested in the robust regulation of the deviation of the problem from
the desired target (φ,U). We analyze the full nonlinear equation which models large perturbations (ϕ,u) to the target (φ,U). Hence we consider the following system (for (φ,U)
Aziz Belmiloudi 9
given satisfying the regularity of Theorem 2.1):
ηρ
∂ϕ
− iηκ div ρ(u + U) ϕ − iηκ div(ρu)φ + b(u + U) · ρb(u + U) (ϕ)
∂t
+ b(u + U) · ρb(u + U) − b(U) · ρb(U) (φ)
+ ρ G(φ + ϕ) − G(φ) = 0 in ᏽ,
ρ
(3.1a)
∂v
+ curl ρ curl(u) − ∇ div(ρu)
∂t
+ ρ b(u + U)(ϕ + φ)(ϕ + φ) − b(U)(φ)φ = curl(ρh) in ᏽ,
subjected to the Robin-type boundary conditions
1 ∂ϕ
= μϕ,
κ2 ∂n
u · n = 0,
curl(u) = h in Σ,
(3.1b)
and the initial conditions
ϕ(0) = ϕ0 ,
u(0) = u0
in Ω.
(3.1c)
If we set F(ϕ) = G(ϕ + φ) − G(φ), B(u) = b(U + u) then (3.1) is reduced to
ηρ
∂ϕ
− iηκ div ρ(u + U) ϕ − iηκ div(ρu)φ
∂t
+ B(u) · ρB(u) (ϕ + φ) + ρF(ϕ) = B(0) · ρB(0) (φ)
in ᏽ,
∂u
ρ + curl ρ curl(u) − ∇ div(ρu) + ρ B(u)(ϕ + φ)(ϕ + φ)
∂t
= ρ B(0)(φ)φ + curl(ρh)
(3.2a)
in ᏽ,
subjected to the Robin-type boundary conditions
1 ∂ϕ
= μϕ,
κ2 ∂n
u · n = 0,
curl(u) = h in Σ,
(3.2b)
and the initial conditions
ϕ(0) = ϕ0 ,
u(0) = u0
in Ω.
(3.2c)
Now we give the weak formulation associated to problem (3.2).
Multiplying the first part of (3.2) by q ∈ Ᏼ1 (Ω) and the second part by v ∈ Vn and
integrating over Ω gives (according to the third part of (3.2)) the weak formulation
10
Robust control of Ginzburg-Landau models
(a.e. t ∈ (0,T))
η
Ω
ρ
∂ϕ
q dx − iηκ
∂t
+
Ω
ρ
Ω
Ω
div ρ(u + U) ϕq dx − iηκ
ρB(u)(ϕ + φ)B(u)(q)dx +
∂v
v dx +
∂t
+
Ω
Ω
ρ curl(u)curl(v)dx +
Ω
Ω
Ω
ρF(ϕ)q dx =
Ω
Γ
ρϕq dΓ
ρB(0)(φ)B(0)(q)dx,
div(ρu)div(v)dx
ρ (ϕ + φ)B(u)(ϕ + φ) v dx =
div(ρu)φq dx − iμ
Ω
ρ φB(0)(φ) v dx +
Ω
ρhcurl(v)dx,
ϕ(0),u(0) = ϕ0 ,u0 .
(3.3)
3.1. The existence and the stability results. Now we show the existence of the solution
to the problem (3.3).
2 (Ω) × L2 (Ω) and h ∈ L2 (ᏽ), there exists (ϕ,u) ∈
Theorem 3.1. For any (ϕ0 ,u0 ) ∈ ᏸ∞
∞
(ᐃ ∩ ᏸ (ᏽ)) × Wn solution of (3.3). Moreover, the following estimation exists:
2
2
ϕ2W + u2Wn ≤ C h2L2 (ᏽ) + ϕ0 L2 (Ω) + u0 L2 (Ω) .
(3.4)
Proof. The proof of this result is a consequence of the result of Theorem 2.1, so we omit
the tedious details.
Next we will establish a stability result which gives us uniqueness of solution of (3.2)
as a corollary.
2 (Ω) × L2 (ᏽ).
Theorem 3.2. Let (u01 ,ϕ01 ,h1 ) and (u02 ,ϕ02 ,h2 ) be functions of L2 (Ω) × ᏸ∞
∞
∞
If (u1 ,ϕ1 ) ∈ Wn × (ᐃ ∩ ᏸ (ᏽ)) (resp., (u2 ,ϕ2 ) ∈ Wn × (ᐃ ∩ ᏸ (ᏽ))) is solution of (3.3)
with (ϕ01 ,u01 ,h1 ) (resp., (ϕ02 ,u02 ,h1 )) the given data, then the following estimation exists:
2 2
ϕ2W + u2Wn ≤ C ϕ0 L2 + u0 L2 + h2L2 (ᏽ) ,
(3.5)
where ϕ = ϕ1 − ϕ2 , u = u1 − u2 , ϕ0 = ϕ01 − ϕ02 , u0 = u01 − u02 , and h = h1 − h2 .
Proof. Let (ϕi ,ui ,ϕ0i ,u0i ,hi )i=1,2 be two solutions of (3.3) with (ϕ0i ,u0i )i=1,2 the initial data
respectively. We denote by ϕ = ϕ1 − ϕ2 , u = u1 − u2 , ϕ0 = ϕ01 − ϕ02 , u0 = u01 − u02 , and
Aziz Belmiloudi 11
h = h1 − h2 . Then the couple (ϕ,u) is solution of
η
Ω
ρ
∂ϕ
q dx − iηκ
∂t
+
+
Ω
ρ
Ω
Ω
Ω
ρB u1 φ2 uq dx +
Ω
ρϕq dΓ
ρuφ2 B u2 (q)dx
Ω
Ω
ρ φ2 B u1 (ϕ) v dx +
Γ
ρ F ϕ1 − F ϕ2 q dx = 0,
ρ curl(u)curl(v)dx +
div(ρu)φ1 q dx − iμ
Ω
Ω
Ω
Ω
div ρU2 ϕq dx +
ρB u1 (ϕ)B u1 (q)dx +
∂u
v dx +
∂t
+
div(ρu)div(v)dx +
2
uφ2 v dx =
Ω
Ω
ρ ϕB u1 φ1 v dx
ρhcurl(v)dx,
ϕ(0),u(0) = ϕ0 ,u0 ,
(3.6)
where Ui = ui + U and φi = ϕi + φ, for i = 1,2 (according to the regularity of (ϕi ,ui ) and
(φ,U), the couple (φi ,Ui ) is in (ᐃ ∩ ᏸ∞ (ᏽ)) × Wn ).
By choosing (q,v) = (ϕ,u) in (3.6) and taking the real part of the first part of the
system, we have (according to Lemma 1.5 and to the expression of F)
∂|ϕ|2
dx + ηκ
η ρ
2∂t
Ω
Ω
div(ρu)Ᏽ φ1 ϕ dx +
ρu φ2 B u2 (ϕ) dx +
+
Ω
ρB u1 (ϕ)B u1 (ϕ)dx
ρu B u1 φ2 ϕ dx
Ω
Ω 2
2 2
+ ρ φ1 + φ2 − 1 ϕ dx + ρ φ1 φ2 (ϕ)2 dx = 0,
Ω
Ω
2
∂|u|2
ρ
v dx + ρ curl(u) dx + div(ρu)div(u)dx + ρ ϕB u1 φ1 udx
Ω
2∂t Ω
Ω
Ω
2
+ ρ φ2 B u1 (ϕ) u + |u|2 φ2 dx = ρhcurl(u)dx,
Ω
ϕ(0),u(0) = ϕ0 ,u0
Ω
Ω
(3.7)
and then (according to hypothesis (1.3), Lemma 1.6 and to the regularity of φ, (φi )i=1,2 ,
that is, in ᏸ∞ (ᏽ))
ηρ0
dϕ2L2 ρ0
+ ∇ϕ2L2
2dt κ2
≤ c1
Ω
+ c4
div(ρu)|ϕ|dx + c2
Ω
Ω
U1 |ϕ||∇ϕ|dx + c3
∇φ2 + U2 + U1 |ϕ||u|dx + c5
Ω
Ω
2 1 + U1 |ϕ|2 dx
|∇ϕ||u|dx,
12
Robust control of Ginzburg-Landau models
ρ0
2 2 du2L2
+ ρ0 curl(u)
L2 + div(u)
L2
2dt
≤ c6
|u| div(u) dx + |h| curl(u) dx + c7 |u||ϕ| ∇φ1 + U1 dx
Ω
Ω
Ω
+ c8 |u||∇ϕ|dx + c9 |u|2 dx,
Ω
Ω
ϕ(0),u(0) = ϕ0 ,u0 .
(3.8)
According to the regularity of Ui , φi , and by using Young’s inequality, we have then for all
δ > 0 and γ > 0 (since H 1 ⊂ L4 ),
ηρ0
dϕ2L2 ρ0
+ 2 ∇ϕ2L2
2dt
κ
2 2 ρ0
≤ δ curl(u)
L2 + div(u)
L2 + 2 ∇ϕ2L2 + c10 U1 L4 ϕL4 ∇ϕL2
4κ
2 2 + c11 U1 L4 + U2 L4 ϕ2L4 + c12 uL4 ϕL4 ∇φ2 L2 + c13 ϕ2L2 + u2L2 ,
ρ0
2 2 du2L2
+ ρ0 curl(u)
L2 + div(u)
L2
2dt
ρ0 curl(u)
2 2 + div(u)
2 2 + γ∇ϕ2 2 + c14 h2 2
≤
L
L
L
L
4
+ c15 uL4 ϕL4 ∇φ1 L2 + U1 L2 + c16 ϕ2L2 + u2L2 ,
ϕ(0),u(0) = ϕ0 ,u0 .
(3.9)
By using Gagliardo-Nirenberg inequalities (Lemma 1.4), we have
2 2 d
ϕ2L2 + u2L2 + ∇ϕ2L2 + curl(u)
L2 + div(u)
L2
dt
2 2 ≤ c17 h2L2 + c18 1 + ∇φ1 L2 + ∇φ2 L2 ϕ2L2 + u2L2
4 4 2 2 + c19 U1 4 + U2 4 + U1 4 + U2 4 ϕ2 2 ,
L
L
L
(3.10)
L
L
ϕ(0),u(0) = ϕ0 ,u0 .
Since Ui , i = 1,2, are in L∞ (0,T,L2 (Ω)), by using again Gagliardo-Nirenberg inequalities,
we can deduce that (by integrating over (0,t) for t ∈ (0,T))
ϕ2L2 + u2L2 +
≤ c20
t
0
t
0
∇ϕ2L2 ds +
2
t
0
2
curl(u)
2 2 + div(u)
2 2 ds
L
2
L
2 1 + φ1 H 1 + φ2 H 1 + U1 H 1 + U2 H 1
2 2
+ c21 ϕ0 L2 + u0 L2 + h2L2 (ᏽ) .
ϕ2L2 + u2L2 ds
(3.11)
Aziz Belmiloudi 13
Gronwall’s formula implies
2 2
ϕ2Ᏹ + u2En ≤ C ϕ0 L2 + u0 L2 + h2L2 (ᏽ) .
(3.12)
By using (3.6), Green’s formula, the estimate (3.12), and Lemma 1.4, we can deduce the
result of the theorem.
According to Theorem 3.2, we have the following result.
Corollary 3.3. The solution of problem (3.3) is unique.
We are now going to study the differentiability of the operator solution of problem
(3.3).
4. Differentiability of the operator solution
Before proceeding with investigation of the Fréchet differentiability of the function Ᏺ :
2 (Ω) × L2 (Ω) × L2 (ᏽ) of
(ϕ0 ,u0 ,h) → (ϕ,u), which maps the source term (ϕ0 ,u0 ,h) ∈ ᏸ∞
problem (3.3) into the corresponding solution (ϕ,u) ∈ Ᏹ × En , we study the following
problem (ᏼI ): find (ψ,w) ∈ Ᏹ × En such that (∀(q,v) ∈ Ᏼ1 (Ω) × Vn and a.e. t ∈ (0,T)):
∂ψ
η ρ q dx − iηκ
Ω ∂t
+
Ω
ρ
Ω
Ω
div ρU1 ψq dx − iηκ
Ω
div(ρw)φ1 q dx − iμ
Ω
Γ
ρψq dΓ
ρB(u) φ1 wq dx
2
ρ 2φ1 − 1 ψ + φ2 ψ q dx = 0,
1
Ω
ρ curl(w)curl(v)dx +
Ω
div(ρw)div(v)dx +
2 ρ φ1 B(u)(ψ) + wφ1 v dx =
Ω
ρ B(u)(ψ) + φ1 w B(u)(q)dx +
∂w
v dx +
∂t
+
Ω
+
Ω
Ω
ρ ψB(u) φ1 v dx
ρk curl(v)dx,
ψ(0),w(0) = ψ0 ,w0 ,
(4.1)
where U1 = U + u and φ1 = φ + ϕ.
Remark 4.1. The problem (P I ) is the weak formulation of the following problem:
ηρ
∂ψ
− iηκ div ρU1 ψ + div(ρw)φ1 + B(u) · ρ B(u)(ψ) + φ1 w + ρB(u) φ1 w
∂t
2
+ ρ 2φ1 − 1 ψ + φ12 ψ = 0 in ᏽ,
ρ
∂w
+ curl ρ curl(w) + ∇ div(ρw) + ρ ψB(u) φ1
∂t
2 + ρ φ1 B(u)(ψ) + wφ1 = curl(ρk)
in ᏽ,
(4.2a)
14
Robust control of Ginzburg-Landau models
subjected to the Robin-type boundary conditions
1 ∂ψ
= μψ,
κ2 ∂n
w · n = 0,
in Σ,
curl(w) = k
(4.2b)
and the initial conditions
ψ(0),w(0) = ψ0 ,w0
in Ω.
(4.2c)
Theorem 4.2. If (u,ϕ) and (U,φ) are in Wn × (ᐃ ∩ ᏸ∞ (ᏽ)), then
2 (Ω) × L2 (Ω) × L2 (ᏽ), there exists a unique couple of func(i) for any (ψ0 ,w0 ,k) ∈ ᏸ∞
tions (ψ,w) ∈ Ᏹ × En , solution of problem (ᏼI ), such that
2 2
ψ 2Ᏹ + w 2En ≤ Ce ψ0 L2 + w0 L2 + k 2L2 (ᏽ) ,
(4.3)
2 (Ω) × L2 (Ω) × L2 (ᏽ). If (ψ ,w ) is
(ii) let (ψ0i ,w0i ,ki ), i = 1,2, be two couples of ∈ ᏸ∞
i
i
the solution of (ᏼI ), where the initial condition is (ψ0i ,w0i ), i = 1,2, then
ψ1 − ψ2 2 + w1 − w2 2 ≤ Ce ψ01 − ψ02 2 2 + w01 − w02 2 2 + k1 − k2 2 2
Ᏹ
En
L
L
L (ᏽ) .
(4.4)
Proof. (i) The existence of the solution of (ᏼI ) is obtained in the same way as to prove
the Theorem 2.1 and by using the regularity of (U1 ,φ1 ). The uniqueness is a consequence
of the estimate (4.3) (since the problem (ᏼI ) is linear).
To prove the estimate (4.3), we put (q,v) = (ψ,w) in (P I ) and we obtain
∂ψ
η ρ ψdx − iηκ
Ω ∂t
− iμ
+
Ω
ρ
Ω
div ρU1 |ψ |2 dx − iηκ
ρ|ψ |2 dΓ +
Ω
2
ρB(u)(ψ) dx +
Ω
div(ρw)φ1 ψdx
Ω
ρ B(u) φ1 ψ + φ1 B(u)(ψ) w dx
1
Ω
2
ρ curl(w) dx +
Ω
2
ρ 2φ1 − 1 |ψ |2 + φ2 (ψ)2 dx = 0,
∂|w|2
dx +
2∂t
+
Ω
Γ
Ω
div(ρw)div(w)dx +
2 ρ φ1 B(u)(ψ) + wφ1 w dx =
Ω
Ω
ρ ψB(u) φ1 w dx
ρk curl(w)dx,
ψ(0),w(0) = ψ0 ,w0 .
(4.5)
By taking the real part of the first part of previous system, by using the same technique
as to prove the stability result and the regularity of (U1 ,φ1 ) (so we omit the details), we
obtain the estimate given in (i).
(ii) Since the problem (ᏼI ) is linear, then the result (ii) is a consequence of the estimate
(4.3).
Aziz Belmiloudi 15
We are now going to study the Fréchet differentiability of Ᏺ.
2 (Ω) and (u ,h) ∈ L2 (Ω) × L2 (ᏽ) with Ᏺ(ϕ ,u ,h)
Theorem 4.3. (i) Let ϕ0 ,ϕ0 + β ∈ ᏸ∞
0
0 0
and Ᏺ(ϕ0 + β,u0 ,h) being the corresponding solutions of (3.3). Then
Ᏺ ϕ0 + β,u0 ,h − Ᏺ ϕ0 ,u0 ,h − Ᏺ ϕ0 ,u0 ,h β
ϕ
Ᏹ×En
≤ C β3/2
ᏸ2 ,
(4.6)
2 (Ω) → Ᏹ × E is a linear operator, and (ψ,w) = Ᏺ (ϕ ,u ,h)β is
where Ᏺϕ (ϕ0 ,u0 ,h) : ᏸ∞
n
ϕ 0 0
the solution of the problem (ᏼI ) satisfying (ψ,w)(t = 0) = (β,0) and k = 0 (denote this
problem by (ᏼFP )).
2 (Ω) × L2 (Ω) × L2 (ᏽ), i = 1,2, the
Moreover, for all Xh(i) = (ϕ0i ,u0i ,hi ) ∈ ᏸ∞
(1)
(2)
following estimate exists: Ᏺϕ (Xh )β − Ᏺϕ (Xh )β2Ᏹ×En ≤ Ce (βᏸ2 Xh 2ᏸ2 ×L2 ×L2 (ᏽ) +
(1)
β2ᏸ2 Xh ᏸ2 ×L2 ×L2 (ᏽ) ), where ϕ0 = ϕ01 − ϕ02 , u0 = u01 − u02 , h = h1 − h2 and Xh = Xh −
Xh(2) .
2 (Ω) × L2 (ᏽ) with Ᏺ(ϕ ,u ,h) and Ᏺ(ϕ ,u
(ii) Let u0 ,u0 + z ∈ L2 (Ω) and (ϕ0 ,h) ∈ ᏸ∞
0 0
0 0
+ z,h) being the corresponding solutions of (3.3). Then
Ᏺ ϕ0 ,u0 + z,h − Ᏺ ϕ0 ,u0 ,h − Ᏺ ϕ0 ,u0 ,h z
u
Ᏹ×En
≤ C z3/2
L2 ,
(4.7)
where Ᏺu (ϕ0 ,u0 ,h) : L2 (Ω) → Ᏹ × En is a linear operator, and (ψ,w) = Ᏺu (ϕ0 ,u0 ,h)z is the
solution of the problem (ᏼI ) satisfying (ψ,w)(t = 0) = (0,z) and k = 0 (denote this problem
by (ᏼFu )).
2 (Ω) × L2 (Ω) × L2 (ᏽ), i = 1,2, the following
Moreover, for all Xh(i) = (ϕ0i ,u0i ,hi ) ∈ ᏸ∞
estimate exists:
(1)
(2) 2
Ᏺu Xh z − Ᏺu Xh z
Ᏹ×En
2
≤ Ce zL2 Xh ᏸ2 ×L2 ×L2 (ᏽ) + z2L2 Xh ᏸ2 ×L2 ×L2 (ᏽ) ,
(4.8)
where ϕ0 = ϕ01 − ϕ02 , u0 = u01 − u02 , h = h1 − h2 and Xh = Xh(1) − Xh(2) .
2 (Ω) × L2 (Ω) with Ᏺ(ϕ ,u ,h) and Ᏺ(ϕ ,
(iii) Let h,h + f ∈ L2 (ᏽ) and (ϕ0 ,u0 ) ∈ ᏸ∞
0 0
0
u0 ,h + f ) being the corresponding solutions of (3.3). Then
3/2
Ᏺ ϕ0 ,u0 ,h + f − Ᏺ ϕ0 ,u0 ,h − Ᏺ ϕ0 ,u0 ,h f h
Ᏹ×En ≤ C f L2 ,
(4.9)
where Ᏺh (ϕ0 ,u0 ,h) : L2 (ᏽ) → Ᏹ × En is a linear operator, and (ψ,w) = Ᏺh (ϕ0 ,u0 ,h) f is the
solution of the problem (ᏼI ) satisfying (ψ,w)(t = 0) = (0,0) and k = f (denote this problem
by (ᏼFh )).
16
Robust control of Ginzburg-Landau models
2 (Ω) × L2 (Ω) × L2 (ᏽ), i = 1,2, the following
Moreover, for all Xh(i) = (ϕ0i ,u0i ,hi ) ∈ ᏸ∞
estimate exists:
2
(1)
(2)
Ᏺh Xh f − Ᏺh Xh f Ᏹ×En
2
≤ Ce f L2 (ᏽ) Xh ᏸ2 ×L2 ×L2 (ᏽ) + f 2L2 (ᏽ) Xh ᏸ2 ×L2 ×L2 (ᏽ) ,
(4.10)
where ϕ0 = ϕ01 − ϕ02 , u0 = u01 − u02 , h = h1 − h2 and Xh = Xh(1) − Xh(2) .
Proof. According to Theorem 4.2, the problems (ᏼFP ), (ᏼFu ), and (ᏼFh ) have a unique
solution in Ᏹ × En .
(i) Let be (ϕ,u) = Ᏺ(ϕ0 ,u0 ,h) and (ϕβ ,uβ ) = Ᏺ(ϕ0 + β,u0 ,h). From the stability estimate in Theorem 3.2, we know that
ϕβ − ϕ
2 + uβ − u
2 ≤ C β2 2 .
ᏸ
Ᏹ
En
(4.11)
Denote φβ = ϕβ − ϕ, Uβ = uβ − u, U1 = U + u, φ1 = φ + ϕ, ϕ∗ = φβ − ψ, u∗ = Uβ − w.
It is easy to see that (ϕ∗ ,u∗ ) satisfies the linear problem (a.e. t ∈ (0,T))
η
Ω
ρ
∂ϕ∗
q dx
∂t
− iηκ
− iμ
+
Ω
+
Ω
+
Ω
Γ
Ω
+
Ω
+
Ω
+
Ω
ρϕ∗ q dΓ +
Ω
div(ρu∗ )φ1 q dx +
Ω
Ω
div ρUβ φβ q dx
ρ u∗ φ1 + B(u)(ϕ∗ ) + Uβ φβ B(u)(q)dx
ρUβ Uβ φ1 + B(u) φβ + Uβ φβ q dx
ρB(u) φ1 u∗ q dx +
Ω
2
2
ρ φβ + 2 φ1 φβ φβ + φ1 φβ q dx
2
2 ρ 2φ1 − 1 ϕ∗ + φ1 ϕ∗ q dx = 0,
∂u∗
ρ
v dx +
∂t
Ω
div ρU1 ϕ∗ q dx +
Ω
ρ curl(u∗ )curl(v)dx +
Ω
div(ρu∗ )div(v)dx
ρ φβ B(u) φβ v dx
2 ρUβ 2 φ1 φβ + φβ v dx +
2
ρu∗ φ1 v dx = 0,
Ω
ρ φ1 B(u)(ϕ∗ ) + ϕ∗ B(u) φ1 v dx
(ϕ∗ ,u∗ )(0) = (0,0) in Ω.
(4.12)
Aziz Belmiloudi 17
By choosing (q,v) = (ϕ∗ ,u∗ ) in (4.12), we obtain (a.e. t ∈ (0,T))
η
Ω
ρ
∂ϕ∗ ∗
ϕ dx − iηκ
∂t
Ω
+
− iμ
Γ
div ρU1 |ϕ∗ |2 dx +
ρ|ϕ∗ |2 dΓ +
Ω
Ω
div ρu∗ )φ1 ϕ∗ dx
div ρUβ φβ ϕ∗ dx
Ω
ρ u∗ φ1 + B(u)(ϕ∗ ) + Uβ φβ B(u)(ϕ∗ )dx
ρUβ Uβ φ1 + B(u) φβ + Uβ φβ ϕ∗ dx +
+
ρB(u) φ1 u∗ ϕ∗ dx
Ω
Ω 2 2
∗
+ ρ φβ + 2 φ1 φβ φβ + φ1 φβ ϕ dx
Ω 2
2 + ρ 2φ1 − 1)|ϕ∗ |2 + φ1 ϕ∗ dx = 0,
Ω
∂|u∗ |2
ρ
dx +
2∂t Ω
+
Ω
+
Ω
Ω
2
ρ curl(u∗ ) dx +
ρUβ 2 φ1 φβ
Ω
div(ρu∗ )div(u∗ )dx +
2 + φβ u∗ dx +
2
Ω
Ω
ρ φβ B(u) φβ u∗ dx
ρ φ1 B(u)(ϕ∗ ) + ϕ∗ B(u) φ1 u∗ dx
ρ|u∗ |2 φ1 dx = 0.
(4.13)
Since φ1 and φβ are in ᏸ∞ (ᏽ) and according to hypothesis (1.3) and Lemma 1.6, we have
(by taking the real part of the first part of previous system)
ηρ0
dϕ∗ 2L2 ρ0
+ 2 ∇ϕ∗ 2L2
2dt
κ
≤C
Ω
div(ρu∗ )|ϕ∗ |dx +
Ω
div ρUβ φβ |ϕ∗ |dx
∗ |u | + Uβ φβ B(u)(ϕ∗ )dx
Ω
2
+ U1 |ϕ∗ |2 dx + U1 |ϕ∗ ||∇ϕ∗ |dx
Ω
Ω
+ Uβ Uβ + B(u) φβ |ϕ∗ |dx
+
Ω
+
∗ 2
ρ0
d u L 2
2dt
Ω
Ω
2 ∗
φβ |ϕ |dx +
Ω
|ϕ∗ |2 dx ,
2 2 + ρ0 curl(u∗ )
2 + div(u∗ )
2
L
≤C
B(u) φ1 |u∗ ||ϕ∗ |dx +
Ω
|u∗ | div(u∗ )dx +
+
Ω
L
Ω
∗
Uβ φβ |u |dx +
|u∗ |2 dx +
Ω
Ω
φβ B(u) φβ |u∗ |dx
B(u)(ϕ∗ ) + |ϕ∗ |B(u) φ1 |u∗ |dx ,
(4.14)
18
Robust control of Ginzburg-Landau models
and then
ηρ0
dϕ∗ 2L2 ρ0
+ 2 ∇ϕ∗ 2L2
2dt
κ
≤ C Uβ H 1 φβ L4 ϕ∗ L4 + u∗ H 1 ϕ∗ L2 + ϕ∗ 2L2 + U1 L4 ϕ∗ L4 ∇ϕ∗ L2
2
+ U1 L4 ϕ∗ 2L4
+
∗
2 2 u L2 + Uβ L4 + φβ L4 + Uβ L4 φβ H 1 ϕ∗ L4
1 + U1 L4
+ u∗ L2 + Uβ L4 φβ L4 ϕ∗ H 1
4
+ U1 H 1 + φ1 H 1 ϕ∗ L4 u∗ L4 + φβ L4 ,
ρ0
2 du∗ 2L2
+ ρ0 curl(u∗ )
L2 + div(u∗ )2L2
2dt
≤ C u∗ L2 div(u∗ )
L2 + u∗ 2L2 + φβ L4 φβ H 1 + U1 L4 φβ L4 u∗ L4
+ Uβ L4 φβ L4 u∗ L4 + u∗ L2 ϕ∗ H 1 + U1 L4 ϕ∗ L4
+ u∗ L4 φ1 H 1 + U1 L4 φ1 L4 ϕ∗ L4 .
(4.15)
By using Nirenberg-Gagliardo inequality and Lemma 1.7, we have then
ηρ0
dϕ∗ 2L2 ρ0
ρ0 curl(u∗ )
2 2 + div(u∗ )
2 2 + ρ0 ∇ϕ∗ 2 2
+ 2 ∇ϕ∗ 2L2 ≤
L
L
L
2dt
κ
4
4κ2
2
2
2
2 4 + c1 1 + U1 H 1 + φ1 H 1 + U1 L4
+ c2 1 + Uβ H 1 + φβ H 1
u∗ 2L2 + ϕ∗ 2L2
u∗ 2L2 + ϕ∗ 2L2
2 2 4 4
+ c3 Uβ H 1 φβ L2 + c4 φβ H 1 Uβ L2 + c5 φβ L4 + Uβ L4 ,
ρ0
2 2 ρ0 du∗ 2L2
curl(u∗ )
2 2 + div(u∗ )
2 2
+ ρ0 curl(u∗ )
L2 + div(u∗ )
L2 ≤
L
L
2dt
4
2
2
4 ρ0
+ 2 ∇ϕ∗ 2L2 + c6 1 + U1 H 1 + φ1 H 1 + U1 L4 u∗ 2L2 + ϕ∗ 2L2
4κ
2 4 4
+ c7 φβ H 1 φβ L2 + c8 φβ L4 + Uβ L4 .
(4.16)
Aziz Belmiloudi 19
By adding the first part and the second part of (4.16) and integrating in time, we obtain
t
2 2 ϕ L 2 + u L 2 +
∇ϕ∗ 2L2 + curl(u∗ )
L2 + div(u∗ )
L2 ds
0
t
2
2
4 2
2 ≤ c9
1 + U1 H 1 + φ1 H 1 + U1 L4 + Uβ H 1 + φβ H 1 u∗ 2L2 + ϕ∗ 2L2 ds
0
t
t
2
4 4 Uβ 1 + φβ 2 1 φβ 2 + Uβ 2 ds +
φβ 4 + Uβ 4 ds.
+ c10
∗ 2
∗ 2
H
0
H
L
L
0
L
L
(4.17)
By using again Nirenberg-Gagliardo inequality, we have (since all functions in previous
result are in L∞ (0,T,L2 (Ω)))
t
2 2 ϕ∗ 2L2 + u∗ 2L2 +
∇ϕ∗ 2L2 + curl(u∗ )
L2 + div(u∗ )
L2 ds
0
t
2
2
2
2 ≤ c11
1 + U1 H 1 + φ1 H 1 + Uβ H 1 + φβ H 1 u∗ 2L2 + ϕ∗ 2L2 ds
0
3
4
+ c12 φβ ,Uβ + φβ ,Uβ .
Ᏹ×En
(4.18)
Ᏹ×En
Using now Gronwall’s formula and the stability result (4.11), we can deduce that (since
all functions in previous inequality are bounded in L2 (0,T,H 1 (Ω))) (ϕ∗ ,u∗ )Ᏹ×En ≤
β3/2
L2 . Therefore, we have the first part of (i).
Prove now the second part of (i).
2 (Ω) × L2 (Ω) × L2 (ᏽ), i = 1,2, (given) and (ψ ,w ) = Ᏺ (ϕ ,
Let (ϕ0i ,u0i ,hi ) be in ᏸ∞
i
i
ϕ 0i
u0i ,hi ) · β be solution of (ᏼFP ) (we denote by (ϕi ,ui ) = Ᏺ(ϕ0i ,u0i ,hi ) and by (ϕ,u) = (ϕ1 −
ϕ2 ,u1 − u2 )).
Set (ψ,w) = (ψ1 − ψ2 ,w1 − w2 ), (ϕ0 ,u0 ,h) = (ϕ01 − ϕ02 ,u01 − u02 ,h1 − h2 ), Ui = ui + U
and φi = ϕi + φ, (i = 1,2). According to the equations satisfied by (ψ1 ,w1 ) and (ψ2 ,w2 ) we
have (∀(q,v) ∈ Ᏼ1 (Ω) × Vn and a.e. t ∈ (0,T)):
∂ψ
η ρ q dx − iηκ
Ω ∂t
Ω
div ρU2 ψ + div(ρw)φ1 q dx
− iηκ
div(ρu)ψ1 + div ρw2 ϕ q dx
Ω
− iμ ρψq dΓ + ρ B u2 (ψ) + uψ1 + ϕw1 + φ2 w B u2 (q)dx
Γ
Ω
+
Ω
+
Ω
+
Ω
+
Ω
ρ B u1 ψ1 + w1 φ1 uq dx +
Ω
ρB u1 φ1 wq dx
ρ B u2 (ϕ) + uφ1 w2 q dx
2
ρ 2φ1 − 1 ψ + φ12 ψ q dx
ρ 2 |ϕ|2 + 2 ϕφ2 ψ2 + ϕ φ1 + φ2 ψ2 q dx = 0,
20
Robust control of Ginzburg-Landau models
Ω
ρ
∂w
v dx +
∂t
+
Ω
Ω
2 + wφ1 v dx
ρ ψ2 B u2 (ϕ) + uφ1 v dx +
Ω
div(ρw)div(v)dx
ρ φ2 B u2 (ψ) + uψ1 + ϕB u1 ψ1 v dx
Ω
+
Ω
ρ ψB u1 φ1
+
ρ curl(w)curl(v)dx +
Ω
ρw2 |ϕ|2 + 2 ϕφ2 v dx = 0,
ψ(0),w(0) = (0,0).
(4.19)
Putting (q,v) = (ψ,w) in (4.19), we have then
∂ψ
η ρ ψdx − iηκ
Ω ∂t
− iηκ
Ω
− iμ
+
Ω
+
Ω
+
Ω
Ω
ρ
Ω
∂|w|2
2∂t
+
Ω
Ω
+
Ω
div ρU2 |ψ |2 + div(ρw)φ1 ψ dx
div(ρu)ψ1 + div ρw2 ϕ ψdx
ρ|ψ |2 dΓ +
Ω
ρ B u2 (ψ) + uψ1 + ϕw1 + φ2 w B u2 (ψ)dx
ρ B u1 ψ1 + w1 φ1 uψ dx +
Ω
ρB u1 φ1 wψ dx
ρ B u2 (ϕ) + uφ1 w2 ψ dx
2
ρ 2φ1 − 1 ψ + φ12 ψ ψ dx
(4.20)
ρ 2 |ϕ|2 + 2 ϕφ2 ψ2 + ϕ φ1 + φ2 ψ2 ψ dx = 0,
dx +
+
Γ
Ω
+
Ω
2
ρ curl(w) dx +
Ω
ρ ψB u1 φ1
div(ρw)div(w)dx
2 + wφ1 w dx
ρ φ2 B u2 (ψ) + uψ1 + ϕB u1 ψ1 w dx
ρ ψ2 B u2 (ϕ) + uφ1 w dx +
Ω
ρw2 |ϕ|2 + 2 ϕφ2 w dx = 0,
ψ(0),w(0) = (0,0).
By taking the real part of the first part of previous system, we obtain (since (φi )i=1,2 , ϕ are
Aziz Belmiloudi 21
in ᏸ∞ (ᏽ) and according to Lemma 1.6)
ηρ0
dψ 2L2 ρ0
+ 2 ∇ψ 2L2
2dt
κ
≤ C w H 1 ψ L2 + uH 1 ψ1 L4 ψ L4 + w2 H 1 ϕL4 ψ L4
+ ψ H 1 + U2 L4 ψ L4 uL4 ψ1 L4 + w1 L4 ϕL4 + wL2 + U2 L4 ψ L4
+ uL4 ψ L4 w1 L2 + ψ1 H 1 + U1 L4 ψ1 L4
+ ψ L4 wL4 φ1 H 1 + U1 L2
+ w2 L4 ψ L4 ϕH 1 + U2 L4 ϕL4 + uL2 + ψ 2L2
+ ψ2 L4 ϕL4 ψ L4 ,
ρ0
2 2 dw2L2
+ ρ0 curl(w)
L2 + div(w)
L2
2dt
ρ0 curl(w)
2 2 + div(w)2 2
≤
L
L
4
+ C wL4 ψ L4 φ1 H 1 + U1 L2
+ wL2 1 + ψ H 1 + U2 L4 ψ L4 + uL4 ψ1 L4
+ wL4 ϕL4 ψ1 H 1 + U1 L4 ψ1 L4 + w2 L4
+ wL4 ψ2 L4 U2 L4 ϕL4 + ϕH 1 + uL2 .
(4.21)
By using Lemma 1.7 and Young’s formula, we can deduce that
ηρ0
dψ 2L2 ρ0
+ 2 ∇ψ 2L2
2dt
κ
ρ0 ρ0
curl(w)
2 2 + div(w)
2 2
≤ 2 ∇ψ 2L2 +
L
L
4κ
4
2
4 + c0 ψ L2 1 + U2 H 1 + U2 L4
2
2
2
2
+ c1 ψ L2 φ1 ,U1 H 1 + (ϕ,u)
H 1 + ψ1 ,w1 H 1 + ψ2 ,w2 H 1
2 2 2 2 + c2 1 + φ1 ,U1 H 1 w2L2 + c3 (ϕ,u)
L4 ψ1 ,w1 L4 + ψ2 ,w2 L4
2
2 + c4 (ϕ,u)
L2 ψ1 ,w1 H 1 + ψ2 ,w2 H 1
2 + (ϕ,u)
H 1 ψ1 ,w1 L2 + ψ2 ,w2 L2
,
22
ρ0
Robust control of Ginzburg-Landau models
2 2 dw2L2
+ ρ0 curl(w)
L2 + div(w)
L2
2dt
ρ0 curl(w)
2 2 + div(w)
2 2 + ρ0 ∇ψ 2 2 + c5 w L2 1 + U2 2 1 + U2 4 4
≤
L
L
L
H
L
2
4
4κ
2
2
2
2
+ c6 wL2 φ1 ,U1 H 1 + (ϕ,u)
H 1 + ψ1 ,w1 H 1 + ψ2 ,w2 H 1
4
2
+ c7 1 + φ1 ,U1 H 1 + U2 L4 ψ 2L2
2 2 2
+ c8 (ϕ,u)
L4 ψ1 ,w1 L4 + ψ2 ,w2 L4
2
2 + c9 (ϕ,u)
L2 ψ1 ,w1 H 1 + ψ2 ,w2 H 1
2 + (ϕ,u)
H 1 ψ1 ,w1 L2 + ψ2 ,w2 L2
.
(4.22)
Integrating over (0,t) for t ∈ (0,T) and using Theorems 3.2 and 4.2, we obtain then (since
(φi ,Ui ), (ψi ,wi ), i = 1,2, and (ϕ,u) are in L∞ (0,T,L2 (Ω)))
ηρ0 ψ 2L2 +
≤
ρ0
2κ2
2ρ0
κ2
t
0
0
t
+ c11
+ c12
ρ0
2
0
0
+ c16
t
curl(w)
2 2 + div(w)
2 2 ds
L
0
L
2
2
2
2 ψ L2 φ1 ,U1 H 1 + (ϕ,u)
H 1 + ψ1 ,w1 H 1 + ψ2 ,w2 H 1 ds
curl(w)
2 2 + div(w)
2 2 ds
L
0
L
curl(w)
2 2 + div(w)
2 2 ds + ρ0
L
t
0
0
L
2κ2
t
0
∇ψ 2L2 ds
2 w L2 1 + U2 H 1 ds
2
2
2
2 w L2 φ1 ,U1 H 1 + (ϕ,u)
H 1 + ψ1 ,w1 H 1 + ψ2 ,w2 H 1 ds
t
0
2
1 + φ1 ,U1 H 1 w2L2 ds + c13 X 2L2 βL2 + β2L2 Xh L2 ,
t
t
+ c15
ρ0
2
2 ψ L2 1 + U2 H 1 ds
0
t
+ c14
∇ψ 2L2 ds
t
ρ0 w2L2 + 2ρ0
≤
0
∇ψ 2L2 ds +
t
+ c10
t
4
2
1 + φ1 ,U1 H 1 + U2 L4 ψ 2L2 ds + c17 X 2L2 βL2 + β2L2 Xh L2 ,
where Xh = (ϕ0 ,u0 ,h).
(4.23)
Aziz Belmiloudi 23
The previous statements lead to
ψ 2L2 + w 2L2 +
≤ c18
t
0
t
0
2 2 ∇ψ 2L2 + curl(w)
L2 + div(w)
L2 ds
ψ 2L2 + w 2L2
2
2
1 + φ1 ,U1 H 1 + U2 H 1 ds
t
2
2
2 ψ 2L2 + w 2L2 (ϕ,u)
H 1 + ψ1 ,w1 H 1 + ψ2 ,w2 H 1 ds
+ c19
0
+ c20 X 2L2 βL2 + β2L2 Xh L2 .
(4.24)
According to Gronwall’s formula, we can deduce the second part of (i) (since (φi ,Ui )i=1,2 ,
(ψi ,wi )i=1,2 and (ϕ,u) are in L2 (0,T,H 1 (Ω))).
By using the same technique to prove the results of (i), we have the result of (ii) and
(iii). So, we omit the tedious details.
5. Robust control problem
The objective of the robust control problem is to find the best admissible control in the
presence of the worst disturbance which maximally spoils the control objective. We formulated the problem in two situations: firstly the case where the control is in the external
magnetic field and secondly the case where the control is in the initial condition u0 (data
assimilation).
5.1. The control in the external magnetic field. In this section, we consider two situations: firstly the case where the worst disturbance is in the external magnetic field h and
secondly the case where the disturbance is in the initial condition ϕ0 .
5.1.1. Distributed disturbance in the external magnetic field. We suppose now that the
value h is decomposed into the disturbance f ∈ L2 (ᏽ) and the control g ∈ L2 (ᏽ), that is,
h = f + g. So the function (ϕ,u) is assumed to be related to the disturbance f and control
g through the problem (3.3) (∀(q,v) ∈ Ᏼ1 (Ω) × Vn and a.e. t ∈ (0,T))
∂ϕ
η ρ q dx − iηκ
Ω ∂t
+
Ω
ρ
Ω
=
Ω
Ω
div ρ(u + U) ϕq dx − iηκ
Ω
ρ curl(u)curl(v)dx +
ρ φB(0)(φ) v dx +
Ω
Ω
Ω
div(ρu)φq dx − iμ
ρF(ϕ)q dx =
ϕ(0),u(0) = ϕ0 ,u0 .
Ω
Ω
div(ρu)div(v)dx
ρ ϕ + φ B(u)(ϕ + φ) v dx
Ω
+
ρB(u)(ϕ + φ)B(u)(q)dx +
∂u
v dx +
∂t
ρ( f + g)curl(v)dx,
Γ
ρϕq dΓ
ρB(0)(φ)B(0)(q)dx,
(5.1)
24
Robust control of Ginzburg-Landau models
To obtain the regularity of Theorem 4.2, we suppose the following hypotheses: (ϕ0 ,u0 ) ∈
2 (Ω) × L2 (Ω). Let ᏼ : ( f ,g) → (ϕ,u) = ᏼ( f ,g) be the map: (L2 (ᏽ))2 → Ᏹ × E defined
ᏸ∞
n
by (5.1) and introduce the cost function defined by
2
2
γ
b
α
a
J( f ,g) = |ϕ|2 − Λ
L2 (ᏽ) + u − uobs L2 (ᏽ) + f 2L2 (ᏽ) − g 2L2 (ᏽ) ,
4
2
2
2
(5.2)
where a, b, α, γ are fixed such that α,γ > 0, a,b ≥ 0, and a + b > 0. The functions uobs ∈
L2 (ᏽ) and Λ ∈ L∞ (ᏽ) are given and represent the observation.
Let = 1 × 2 such that 1 and 2 are (given) nonempty, closed, convex, bounded
subsets of L2 (ᏽ). We want to minimize the functional J with respect to f and maximize J
with respect to g, that is, to study the following problem (ᏹᏼ1 ):
find an admissible control f ∗ ∈ 1 and a disturbance g ∗ ∈ 2 such that
( f ∗ ,g ∗ ) is a saddle point of the functional J on , subject to system
(5.1).
Such a pair ( f ∗ ,g ∗ ) is called an optimal solution to (ᏹᏼ1 ).
Proposition 5.1. The function ᏼ is continuously Fréchet differentiable from (L2 (ᏽ))2 to
Ᏹ × En with the derivative ᏼ ( f ,g) : Y = (β1 ,β2 ) → (ψ,w) given by the linear problem
(ᏼF1 ) (∀(q,v) ∈ Ᏼ1 (Ω) × Vn and a.e. t ∈ (0,T))
η
Ω
ρ
∂ψ
q dx − iηκ
∂t
+
Ω
2
Ω
div(ρw)φ1 q dx − iμ
Ω
Γ
ρψq dΓ
ρB(u) φ1 wq dx
ρ 2φ1 − 1 ψ + φ12 ψ q dx = 0,
Ω
ρ curl(w)curl(v)dx +
Ω
Ω
Ω
ρ B(u)(ψ) + φ1 w B(u)(q)dx +
∂w
ρ v dx +
Ω ∂t
+
div ρU1 ψq dx − iηκ
+
Ω
2 div(ρw)div(v)dx +
ρ φ1 B(u)(ψ) + wφ1 v dx =
Ω
Ω
ρ ψB(u) φ1 v dx
ρ β1 + β2 curl(v)dx,
ψ(0),w(0) = (0,0),
(5.3)
where (U1 ,φ1 ) = (u + U,ϕ + φ).
Moreover the following estimates exist: (∀( fi ,gi ) ∈ (L2 (Ω))2 , i = 1,2)
(i) ᏼ ( f1 ,g1 )ᏸ((L2 (ᏽ))2 ,Ᏹ×En ) ≤ Ce ;
(ii) ᏼ ( f1 ,g1 )Y − ᏼ ( f2 ,g2 )Y 2Ᏹ×En ≤ Ce (X L2 (ᏽ) Y 2L2 (ᏽ) + X 2L2 (ᏽ) Y L2 (ᏽ) ),
where f = f1 − f2 , g = g1 − g2 and X = ( f ,g).
Aziz Belmiloudi 25
Proof. The proof of this proposition is the consequence of the result of Theorem 4.3. Here
we omit the tedious details.
Proposition 5.2. The map ᏼ defined by (5.1) is continuous from the weak topology of
(L2 (ᏽ))2 to the strong topology of ᏸ2 (ᏽ) × L2 (ᏽ).
Proof. Let f = ( f ,g) be given in (L2 (ᏽ))2 and let be a sequence fk = ( fk ,gk ) such that fk is
weakly convergent in (L2 (ᏽ))2 to f.
Set (ϕ,u) = ᏼ( f ,g) and (ϕk ,uk ) = ᏼ( fk ,gk ). Since fk f weakly in (L2 (ᏽ))2 then fk is
uniformly bounded in (L2 (ᏽ))2 . In view of Theorem 3.2, we can deduce that the sequence
(ϕk ,uk ) is uniformly bounded in Ᏹ × En . Therefore we can extract from (fk ,ϕk ,uk ) a subsequence also denoted by (fk ,ϕk ,uk ) and such that
fk ,gk
ϕk ,uk
ϕk ,uk
2
( f ,g) weakly in L2 (ᏽ) ,
ϕ̃, ũ weakly in Ᏹ × En ,
(5.4)
ϕ̃, ũ strongly in ᏸ2 (ᏽ) × L2 (ᏽ),
ϕk
ϕ̃ weakly in ᏸ2 (Σ).
We prove easily that (ϕ̃, ũ) = ᏼ( f ,g) and according to the uniqueness of the solution of
(5.1), we have then ϕ̃ = ϕ and ũ = u.
Theorem 5.3. For α and γ sufficiently large (i.e., there exists (αl ,γl ) such that α ≥ αl and
γ ≥ γl ), there exists ( f ∗ ,g ∗ ) ∈ and (ϕ∗ ,u∗ ) ∈ Ᏹ × En such that ( f ∗ ,g ∗ ) is defined by
(ᏹᏼ1 ) and (ϕ∗ ,u∗ ) = ᏼ( f ∗ ,g ∗ ) is solution of (5.1).
Proof. Let Pg be the map f → J( f ,g) and let Q f be the map: g → J( f ,g). To obtain the
existence of the robust control problem, we prove that Pg is convex and lower semicontinuous for all g ∈ 2 , and Q f is concave and upper semicontinuous for all f ∈ 1 and
we use the classical minimax theorem in infinite dimensions (see, e.g., [3, 23]).
Firstly we prove, for α and γ sufficiently large, the convexity of the map Pg and the
concavity of the map Q f . In order to prove the convexity, it is sufficient to show that
for all ( f1 , f2 ) ∈ 1 we have (Pg ( f1 ) − Pg ( f2 )) · f ≥ 0, where f = f1 − f2 (because Pg is
Gâteaux differentiable). According to the definition of J, we have that
Pg f1 − Pg f2
·f
2 2 = α f 2L2 (ᏽ) + a
ϕ1 − ϕ2 ψ2 ϕ2 dx dt
ᏽ
2
+a
ϕ1 − Λ ϕ1 − ϕ2 ψ dx dt + b
u1 − u2 w2 dx dt
ᏽ
+a
ᏽ
1
2
ϕ1 − Λ ψ1 − ψ2 ϕ dx dt + b
2
ᏽ
ᏽ
u1 − uobs w1 − w2 dx dt,
(5.5)
where (ϕi ,ui ) = ᏼ( fi ,g), (ψi ,wi ) = ᏼ ( fi ,g) · ( f ,0) (solution of problem (ᏼF1 )), for i =
1,2.
26
Robust control of Ginzburg-Landau models
According to Theorem 3.2 and Proposition 5.1, we have
a
ᏽ
2 2 2
ϕ1 − ϕ2 ψ2 ϕ2 + ϕ1 − Λ ϕ1 − ϕ2 ψ 1 dx dt
+b
ᏽ
u1 − u2 w2 dx dt
≤ C ϕ1 − ϕ2 ψ1 L2 (ᏽ) +
ψ2 ᏽ
L2 (ᏽ)
+ u1 − u2 L2 (ᏽ) w2 L2 (ᏽ)
(5.6)
≤ C0 f 2L2 (ᏽ) ,
a
L2 (ᏽ)
2
ϕ1 − Λ ψ1 − ψ2 ϕ2 dx dt + b
2
≤ C ϕ1 − Λ
L2 (ᏽ)
ψ1 − ψ 2 L2 (ᏽ)
ᏽ
u1 − uobs w1 − w2 dx dt
+ u1 − uobs L2 (ᏽ)
w1 − w2 L2 (ᏽ)
≤ C1 f 3/2
L2 (ᏽ) .
From (5.5)-(5.6) we deduce that for α ≥ αl such that αl > C0 and (αl − C0 )min f ∈1 f 1/2
L2
= C1 , we have (Pg ( f1 ) − Pg ( f2 )) · f ≥ 0 and then the convexity of Pg . In the same way, we
can find γl such that for γ ≥ γl we have the concavity of Q f .
We prove now that Pg is lower semicontinuous for all g ∈ 2 , and Q f is upper semicontinuous for all f ∈ 1 . Let fk be a minimizing sequence of J, that is, liminf k J( fk ,g) =
min f ∈1 J( f ,g) (∀g ∈ 2 ). Then fk is uniformly bounded in 1 and we can extract
from fk a subsequence also denoted by fk such that fk fg weakly in 1 . By using
Proposition 5.2, we have then
ᏼ fk ,g −→ ϕg ,ug strongly in ᏸ2 (ᏽ) × L2 (ᏽ).
(5.7)
Therefore, since the norm is lower semicontinuous, we have that the map Pg : f → J( f ,g)
is lower semicontinuous for all g ∈ 2 . By using the same technique we obtain then Q f
is upper semicontinuous for all f ∈ 1 .
In order to obtain the necessary optimality conditions which have been satisfied by
the solution of the robust control problem, we introduce the following adjoint problem
corresponding to the primal problem (5.1) (we denote by (ϕ,u) = ᏼ( f ,g) and (φ1 ,U1 ) =
(ϕ + φ,u + U)): find (P,Q) ∈ Ᏹ × En such that (∀(q,v) ∈ Ᏼ1 (Ω) × Vn and a.e. t ∈ (0,T)):
−η
Ω
ρ
∂P
q dx − iηκ
∂t
+
Ω
+
Ω
Ω
div ρU1 Pq dx − iμ
ρB(u) φ1 Qq dx +
Ω
−
Γ
ρPq dΓ +
Ω
ρB(u)(P)B(u)(q)dx
i
div ρφ1 Q + ρU1 φ1 Q q dx
κ
2
2 ρ 2φ1 − 1 P + φ1 P q dx = a
Ω
|ϕ|2 − Λ ϕq dx,
Aziz Belmiloudi 27
−
Ω
ρ
∂Q
v dx +
∂t
+
Ω
ρ curl(Q)curl(v)dx +
Ω
Ω
div(Q)div(ρq)dx +
Ω
ρ iηκ∇ φ1 P + PB(u) φ1 + φ1 B(u)(P) v dx = b
2
ρQφ1 v dx
Ω
u − uobs v dx,
P(T),Q(T) = (0,0).
(5.8)
Remark 5.4. (i) The adjoint problem (5.8) is a linear system. By reversing sense of time,
that is, t := T − t, and by applying the same way to obtain the result of Theorem 4.2, we
obtain the existence and the uniqueness of (P,Q).
(ii) The adjoint system (5.8) is the weak formulation of the following problem:
− ηρ
∂P
i
− iηκ div ρU1 P + B(u) · ρB(u)(P) + ρB(u) φ1 Q − div ρφ1 Q + ρU1 φ1 Q
∂t
κ
2
+ ρ 2φ1 − 1 P + φ1 P = a |ϕ|2 − Λ ϕ,
−ρ
2
2
∂Q
+ curl ρ curl(Q) − ρ∇ div(Q) + ρQφ1 ∂t
+ ρ iηκ∇ φ1 P + PB(u) φ1 + φ1 B(u)(P) = b u − uobs ,
(5.9a)
subjected to the boundary conditions
1 ∂P
= μP,
κ2 ∂n
Q · n = 0,
curl(Q) = 0,
in Σ,
(5.9b)
and the final condition
P(T),Q(T) = (0,0).
(5.9c)
We can now give the first-order optimality conditions for the robust control problem
(ᏹᏼ1 ).
Theorem 5.5. Under the assumptions of Theorem 5.3, the optimal solution ( f ∗ ,g ∗ ,u∗ ,ϕ∗ )
∈ × En × Ᏹ, such that ( f ∗ ,g ∗ ) is defined by (ᏹᏼ1 ) and (ϕ∗ ,u∗ ) = ᏼ( f ∗ ,g ∗ ) solution
of (5.1), satisfies
ᏽ
ᏽ
ρ curl(Q∗ ) + α f ∗
f ∗ − f dx dt ≥ 0,
ρ curl(Q∗ ) − γg ∗ (g ∗ − g)dx dt ≤ 0,
(5.10)
∀( f ,g) ∈ ,
where (P ∗ ,Q∗ ) is solution of the adjoint problem (5.8) (corresponding to (ϕ∗ ,u∗ )).
28
Robust control of Ginzburg-Landau models
Proof. The cost function J is a composition of (Fréchet) differentiable maps then J is
differentiable and we have (∀Y = (β1 ,β2 ) ∈ )
J ( f ,g) · Y = a
|ϕ|2 − Λ ϕψ dx dt + b
ᏽ
+α
f β1 dx dt − γ
u − uobs w dx dt
ᏽ
ᏽ
(5.11)
gβ2 dx dt,
ᏽ
where (ψ,w) = ᏼ ( f ,g) · Y is solution of problem (ᏼF1 ).
By taking (q,v) = (P,Q) in (ᏼF1 ), using Green’s formula and integrating by time, we
obtain (according to the initial condition)
−η
ρ
ᏽ
∂P
ψ dx dt +
∂t
+
+
ᏽ
ρ
ᏽ
ᏽ
+
ᏽ
ᏽ
Σ
ρφ1 wB(u)(P)dx dt +
ρPψ dΓdt +
ᏽ
div ρU1 Pψ dx dt
ᏽ
ρB(u)(P)B(u)(ψ)dx dt
ρB(u) φ1 wP dx dt
2
ρ 2φ1 − 1 Pψ + φ2 Pψ dx dt = 0,
1
ᏽ
ρw∇ φ1 P dx dt − iμ
∂Q
w dx dt +
∂t
+
ρP(T)ψ(T)dx − iηκ
ᏽ
Ω
+ iηκ
−
Ω
ρQ(T)w(T)dx +
div(Q)div(ρw)dx dt +
ρ curl(Q)curl(w)dx dt
ᏽ
ᏽ
ρ ψB(u) φ1 Q dx dt
2 ρ φ1 B(u)(ψ) Q + wφ1 Q dx dt =
ᏽ
ρ β1 + β2 curl(Q)dx dt.
(5.12)
Since (P,Q) is solution of (5.8), we have that
iηκ
ᏽ
+
ᏽ
−
ᏽ
ᏽ
ᏽ
ρφ1 wB(u)(P)dx dt +
2
ρ φ12 Pψ − φ1 Pψ dx dt −
ρw∇ φ1 P dx dt +
ᏽ
ᏽ
=
ᏽ
ᏽ
2
|ϕ| − Λ ϕψ dx dt = 0,
u − uobs w dx dt
ρ iηκ∇ φ1 P + PB(u) φ1 + φ1 B(u)(P) w dx dt
ᏽ
ρB(u) φ1 Qψdx dt
ρ ψB(u) φ1 + φ1 B(u)(ψ) Q dx dt + b
−
ᏽ
i
− div ρφ1 Q + ρU1 φ1 Q ψ dx dt + a
κ
ρB(u) φ1 wP dx dt
ρ β1 + β2 curl(Q)dx dt.
(5.13)
Aziz Belmiloudi 29
By adding the real part of the first part of (5.13) and the second part of (5.13), we obtain
2
(since (φ12 Pψ − φ1 Pψ)=0 and Ω (−(i/κ)div(ρφ1 Q)+ρU1 φ1 Q)ψ dx = Ω ρφ1 B(u)(ψ)Q dx,
because Q · n = 0)
a
ᏽ
|ϕ|2 − Λ ϕψ dx dt + b
u − uobs w dx dt =
ᏽ
ᏽ
ρ β1 + β2 curl(Q)dx dt.
(5.14)
According to the expression of J ( f ,g) · Y , we can deduce that
J ( f ,g) · Y =
ρ curl(Q) + α f β1 dx dt +
ᏽ
ρ curl(Q) − γg β2 dx dt.
ᏽ
(5.15)
Since ( f ∗ ,g ∗ ) is an optimal solution, we have
∂J ∗ ∗
( f ,g ) · ( f ∗ − f ) ≥ 0,
∂f
∂J ∗ ∗
( f ,g ) · (g ∗ − g) ≤ 0,
∂f
and then
ᏽ
∀( f ,g) ∈ ,
ρ curl(Q∗ ) + α f ∗ ( f ∗ − f )dx dt ≥ 0,
ᏽ
(5.16)
(5.17)
ρ curl(Q∗ ) − γg ∗ (g ∗ − g)dx dt ≤ 0,
∀( f ,g) ∈ .
This completes the proof.
5.1.2. Distributed disturbance in the initial condition of the order parameter. In this sec2 (Ω)), h =
tion, the disturbance is in ϕ0 and the control is in h, that is, ϕ0 = g(g ∈ ᏸ∞
2
f ( f ∈ L (ᏽ)). So the function (ϕ,u) is assumed to be related to the disturbance f and
control g through the problem (3.3) (a.e. t ∈ (0,T))
η
Ω
ρ
∂ϕ
q dx − iηκ
∂t
+
Ω
ρ
Ω
Ω
ρ curl(u)curl(v)dx +
Ω
div ρ(u + U) ϕq dx − iηκ
ρB(u)(ϕ + φ)B(u)(q)dx +
∂u
v dx +
∂t
+
Ω
Ω
Ω
Ω
ρF(ϕ)q dx =
Γ
Ω
ρϕq dΓ
ρB(0)(φ)B(0)(q)dx,
div(ρu)div(v)dx
ρ ϕ + φ B(u)(ϕ + φ) v dx =
div(ρu)φq dx − iμ
Ω
ρ φB(0)(φ) v dx +
Ω
ρ f curl(v)dx,
ϕ(0),u(0) = g,u0 .
(5.18)
To obtain the regularity of Theorem 4.2, we suppose that u0 ∈ L2 (Ω). Let ᏼ : ( f ,g) →
2 (Ω) → Ᏹ × E defined by (5.18) and introduce
(ϕ,u) = ᏼ( f ,g) be the map: L2 (ᏽ) × ᏸ∞
n
30
Robust control of Ginzburg-Landau models
the cost function defined by
2
2
γ
b
α
a
J( f ,g) = |ϕ|2 − Λ
L2 (ᏽ) + u − uobs L2 (ᏽ) + f 2L2 (ᏽ) − g 2L2 ,
4
2
2
2
(5.19)
where α,β > 0, a,b ≥ 0 and a + b > 0. The functions (uobs ,Λ) ∈ L2 (ᏽ) × L∞ (ᏽ) represent
the observation.
In this section, we study the following minimax control problem (ᏹᏼ2 ):
find an admissible control f ∗ ∈ 1 and a disturbance g ∗ ∈ 2 such that
( f ∗ ,g ∗ ) is a saddle point of the functional J on , subject to system
(5.18),
where, = 1 × 2 such that 1 and 2 are nonempty, closed, convex, bounded subsets
2 (Ω), respectively.
of L2 (ᏽ) and ᏸ∞
The proof of the following propositions and theorem of existence is very similar to
that of Propositions 5.1, 5.2 and of Theorem 5.3. So we omit the details.
Proposition 5.6. The function ᏼ is continuously Fréchet differentiable from L2 (ᏽ) ×
2 (Ω) to Ᏹ × E with the derivative ᏼ ( f ,g) : Y = (β ,β ) → (ψ,w) given by the linear
ᏸ∞
n
1 2
problem (ᏼF2 ) (a.e. t ∈ (0,T))
η
Ω
ρ
∂ψ
q dx − iηκ
∂t +
+
Ω
Ω
Ω
div ρU1 ψq dx − iηκ
ρ B(u)(ψ) + φ1 w B(u)(q)dx +
Ω
Ω
div(ρw)φ1 q dx − iμ
Γ
ρψq dΓ
ρB(u) φ1 wq dx
2
ρ 2φ1 − 1 ψ + φ2 ψ q dx = 0,
∂w
ρ udx +
Ω ∂t
1
Ω
ρ curl(w)curl(v)dx +
Ω
div(ρw)div(v)dx +
2 + ρ φ1 B(u)(ψ) + wφ1 v dx =
Ω
ψ(0),w(0) = β2 ,0 ,
Ω
Ω
ρ ψB(u) φ1 v dx
ρβ1 curl(v)dx,
(5.20)
where (U1 ,φ1 ) = (u + U,ϕ + φ).
2 (Ω), i = 1,2) exist:
Moreover the following estimates (∀( fi ,gi ) ∈ L2 (ᏽ) × ᏸ∞
(i) ᏼ ( f1 ,g1 )ᏸ(L2 (ᏽ)×L2 ,Ᏹ×En ) ≤ Ce ,
(ii) ᏼ(f1 ,g1)Y − ᏼ(f2 ,g2)Y2Ᏹ×En≤Ce(XL2 (ᏽ)×L2Y2L2 (ᏽ)×L2 + X2L2 (ᏽ)×L2YL2 (ᏽ)×L2),
where f = f1 − f2 , g = g1 − g2 and X = ( f ,g).
Proposition 5.7. The map ᏼ defined by (5.18) is continuous from the weak topology of
2 (Ω) to the strong topology of ᏸ2 (ᏽ) × L2 (ᏽ).
L2 (ᏽ) × ᏸ∞
Theorem 5.8. For α and γ sufficiently large, there exist ( f ∗ ,g ∗ ) ∈ and (u∗ ,ϕ∗ ) ∈ En × Ᏹ
such that ( f ∗ ,g ∗ ) is defined by (ᏹᏼ2 ) and (ϕ∗ ,u∗ ) = ᏼ( f ∗ ,g ∗ ) is solution of (5.18).
Aziz Belmiloudi 31
Now we establish necessary optimality conditions for the robust control problem
(ᏹᏼ2 ).
Theorem 5.9. Under the assumptions of Theorem 5.8, the optimal solution ( f ∗ ,g ∗ ,u∗ ,ϕ∗ )
∈ × En × Ᏹ, such that ( f ∗ ,g ∗ ) is defined by (ᏹᏼ2 ) and (ϕ∗ ,u∗ ) = ᏼ( f ∗ ,g ∗ ) is solution
of (5.18), satisfies
ᏽ
ρ curl(Q∗ ) + α f ∗ ( f ∗ − f )dx dt ≥ 0,
Ω
(5.21)
ηρP ∗ (0) − γg ∗ (g ∗ − g) dx ≤ 0,
∀( f ,g) ∈ ,
where (P ∗ ,Q∗ ) is solution of the adjoint problem (5.8) (corresponding to (ϕ∗ ,u∗ )).
Proof. The cost function J is a composition of (Fréchet) differentiable maps, then J is
differentiable and we have (∀Y = (β1 ,β2 ) ∈ )
J ( f ,g) · Y = a
α
ᏽ
ᏽ
|ϕ| − Λ ϕψ dx dt + b
2
f β1 dx dt − γ
Ω
u − uobs w dx dt+
ᏽ
(5.22)
gβ2 dx,
where (ψ,w) = ᏼ ( f ,g) · Y is solution of problem (ᏼF2 ).
By taking (q,v) = (P,Q) in (ᏼF2 ) and integrating by time, we obtain (according to the
initial condition)
−η
ᏽ
ρ
∂P
ψ dx dt + η
∂t
+ iηκ
+
+
−
ᏽ
ρ
ᏽ
ᏽ
+
Σ
Ω
ρψP dΓdt +
ᏽ
ᏽ
div ρU1 Pψ dx dt
ρB(u)(P)B(u)(ψ)dx dt
ᏽ
ρB(u) φ1 wP dx dt
Ω
ρQ(T)w(T)dx +
div(Q)div(ρw)dx dt +
ᏽ
ρ curl(Q)curl(w)dx dt
ᏽ
ρ ψB(u) φ1 Q dx dt
2 ρ φ1 B(u)(ψ) Q + wφ1 Q dx dt =
ᏽ
ρP(0)β2 dx − iηκ
ρ 2|ϕ|2 − 1 Pψ + ϕ2 Pψ dx dt = 0,
ᏽ
Ω
ρφ1 wB(u)(P)dx dt +
∂Q
w dx dt +
∂t
ρP(T)ψ(T)dx − η
ρw∇ φ1 P dx dt − iμ
ᏽ
+
ᏽ
ρβ1 curl(Q)dx dt.
(5.23)
32
Robust control of Ginzburg-Landau models
Since (P,Q) is solution of (5.8), we have that
iηκ
ᏽ
+
ᏽ
ρ
φ12 Pψ
−
ᏽ
ρφ1 wB(u)(P)dx dt +
− φ1 Pψ dx dt − η
ᏽ
+b
Ω
ᏽ
ᏽ
ρB(u) φ1 wP dx dt
ρP(0)β2 dx −
i
div ρφ1 Q + ρU1 φ1 Q ψ dx dt + a
κ
ρ ψB(u) φ1 Q dx dt +
−
2
−
ᏽ
ᏽ
ρw∇ φ1 P dx dt +
ᏽ
ᏽ
ρB(u) φ1 Qψ dx dt
2
|ϕ| − Λ ϕψ dx dt = 0,
ρ φ1 B(u)(ψ) Q dx dt
ρ iηκ∇ φ1 P + PB(u) φ1 + φ1 B(u)(P) w dx dt
ᏽ
u − uobs w dx dt =
ᏽ
ρβ1 curl(Q)dx dt.
(5.24)
By adding the real part of the first part of (5.24) and the second part of (5.24), we obtain
(by using Green’s formula)
−η
Ω
ρ P(0)β2 dx + a
=
ᏽ
ᏽ
|ϕ|2 − Λ ϕψ dx dt + b
ᏽ
u − uobs w dx dt
(5.25)
ρβ1 curl(Q)dx dt.
According to the expression of J ( f ,g) · Y , we can deduce that
J ( f ,g) · Y =
ρ curl(Q) + α f β1 dx dt +
ᏽ
Ω
ηρP(0) − γg β2 dx.
(5.26)
Since ( f ∗ ,g ∗ ) is an optimal solution, we have then
Ω
ᏽ
ρ curl(Q∗ ) + α f ∗ ( f ∗ − f )dx dt ≥ 0,
ηρP ∗ (0) − γg ∗ (g ∗ − g) dx ≤ 0,
(5.27)
∀( f ,g) ∈ .
This completes the proof.
Remark 5.10. In the case where the distributed disturbance is in the initial condition of
the potential, we obtain the same results. In this case, the cost functional is given by
2
2
γ
b
α
a
J( f ,g) = |ϕ|2 − Λ
L2 (ᏽ) + u − uobs L2 (ᏽ) + f 2L2 (ᏽ) − g 2L2 ,
4
2
2
2
(5.28)
where α,γ > 0, a,b ≥ 0 and a + b > 0. The functions (uobs ,Λ) ∈ L2 (ᏽ) × L∞ (ᏽ) represent
the observation.
We can prove also an existence theorem of the robust control problem and obtain
necessary optimality conditions for its solution using the same method.
Let = 1 × 2 such that 1 and 2 are nonempty, closed, convex, bounded subsets
of L2 (ᏽ) and L2 (Ω), respectively.
Aziz Belmiloudi 33
For α and γ sufficiently large, there exists ( f ∗ ,g ∗ ,u,ϕ) ∈ × En × Ᏹ satisfying (a.e.
t ∈ (0,T))
η
ρ
Ω
∂ϕ
q dx − iηκ
∂t +
Ω
ρ
Ω
Ω
Ω
div ρ(u + U) ϕq dx − iηκ
Ω
Ω
ρ curl(u)curl(v)dx +
Ω
ρϕq dΓ
ρB(0)(φ)B(0)(q)dx,
Ω
ρ φB(0)(φ) v dx +
Ω
ρ f ∗ curl(v)dx,
ρ curl(Q) + α f ∗ ( f ∗ − f )dx dt ≥ 0,
ᏽ
Γ
div(ρu)div(v)dx
Ω
ϕ(0),u(0) = ϕ0 ,g ∗ ,
div(ρu)φq dx − iμ
ρF(ϕ)q dx =
ρ ϕ + φ B(u)(ϕ + φ) v dx =
Ω
ρB(u)(ϕ + φ)B(u)(q)dx +
∂u
v dx +
∂t +
ρQ(0) − γg ∗ (g ∗ − g)dx ≤ 0,
Ω
∀( f ,g) ∈ ,
(5.29)
where (P,Q) is solution of (5.8).
5.2. The control in the initial condition of the vector potential. In this section, we formulate the problem in two situations: firstly, the case where the worst disturbance is in
the initial condition ϕ0 , and secondly the case where the disturbance is in the external
magnetic field h.
5.2.1. Distributed disturbance in the initial condition of the order parameter. We suppose
that the control is in u0 , that is, u0 = f ( f ∈ L2 (Ω)) and the disturbance is in ϕ0 , that is,
2 (Ω)). So the function (ϕ,u) is assumed to be related to the disturbance f
ϕ0 = g (g ∈ ᏸ∞
and control g through the problem (3.3):
η
Ω
ρ
∂ϕ
q dx − iηκ
∂t
+
Ω
=
Ω
ρ
Ω
Ω
Ω
Ω
div(ρu)div(v)dx
ρ ϕ + φ B(u)(ϕ + φ) v dx
ϕ(0),u(0) = (g, f ).
Γ
ρϕq dΓ
ρF(ϕ)q dx
ρ curl(u)curl(v)dx +
ρ φB(0)(φ) v dx +
Ω
Ω
div(ρu)φq dx − iμ
a.e. t ∈ (0,T),
Ω
ρB(0)(φ)B(0)(q)dx,
=
Ω
div ρ(u + U) ϕq dx − iηκ
ρB(u)(ϕ + φ)B(u)(q)dx +
∂u
v dx +
∂t
+
Ω
ρhcurl(v)dx,
a.e. t ∈ (0,T),
(5.30)
34
Robust control of Ginzburg-Landau models
To obtain the regularity of Theorem 4.2, we suppose that h ∈ L2 (ᏽ). Let ᏼ : ( f ,g) →
2 (Ω) → Ᏹ × E defined by (5.30) and the cost
(ϕ,u) = ᏼ( f ,g) be the map: L2 (Ω) × ᏸ∞
n
function is defined by
2
2
β
b
α
a
J( f ,g) = |ϕ|2 − Λ
L2 (ᏽ) + u − uobs L2 (ᏽ) + f 2L2 − g 2L2 ,
4
2
2
2
(5.31)
where α,γ > 0, a,b ≥ 0, and a + b > 0. The functions (uobs ,Λ) ∈ L2 (ᏽ) × L∞ (ᏽ) are given.
In this section, we study the following minimax control problem (ᏹᏼ3 ):
find an admissible control f ∗ ∈ 1 and a disturbance g ∗ ∈ 2 such that
( f ∗ ,g ∗ ) is a saddle point of the functional J on , subject to system
(5.30),
where = 1 × 2 such that 1 and 2 are nonempty, closed, convex, bounded subsets
2 (Ω), respectively.
of L2 (Ω) and ᏸ∞
The arguments of Section 5.1 extend directly to the present case without further estimates, so we omit the details. We have then the following results
Proposition 5.11. The function ᏼ is continuously Fréchet differentiable from L2 (Ω) ×
2 (Ω) to Ᏹ × E with the derivative ᏼ ( f ,g) : Y = (β ,β ) → (ψ,w) given by the linear
ᏸ∞
n
1 2
problem (ᏼF3 ) (a.e. t ∈ (0,T)):
η
Ω
ρ
∂ψ
q dx − iηκ
∂t +
+
Ω
Ω
Ω
div ρU1 ψq dx − iηκ
Ω
ρ B(u)(ψ) + φ1 w B(u)(q)dx +
2
2
Ω
div(ρw)φ1 q dx − iμ
Γ
ρψq dΓ
ρB(u) φ1 wq dx
ρ 2|ϕ| − 1 ψ + ϕ ψ q dx = 0,
∂w
ρ v dx +
Ω ∂t
Ω
ρ curl(w)curl(v)dx +
Ω
div(ρw)div(v)dx +
2 + ρ φ1 B(u)(ψ) + wφ1 v dx = 0,
Ω
ψ(0),w(0) = β2 ,β1 ,
Ω
ρ ψB(u) φ1 v dx
(5.32)
where (U1 ,φ1 ) = (u + U,ϕ + φ).
2 (Ω), i = 1,2) exist:
Moreover the following estimates (∀( fi ,gi ) ∈ L2 (Ω) × ᏸ∞
(i) ᏼ ( f1 ,g1 )ᏸ(L2 (Ω)×ᏸ2 (Ω),Ᏹ×En ) ≤ Ce ,
(ii) ᏼ ( f1 ,g1 )Y − ᏼ ( f2 ,g2 )Y 2Ᏹ×En ≤ Ce (X L2 Y 2L2 + X 2L2 Y L2 ),
where f = f1 − f2 , g = g1 − g2 and X = ( f ,g).
Proposition 5.12. The map ᏼ defined by (5.30) is continuous from the weak topology of
2 (Ω) to the strong topology of ᏸ2 (ᏽ) × L2 (ᏽ).
L2 (Ω) × ᏸ∞
Theorem 5.13. For α and γ sufficiently large (i.e., there exists (αl ,γl ) such that α ≥ αl and
γ ≥ γl ), there exist ( f ∗ ,g ∗ ) ∈ and (ϕ∗ ,u∗ ) ∈ Ᏹ × En such that ( f ∗ ,g ∗ ) is defined by
(ᏹᏼ3 ) and (ϕ∗ ,u∗ ) = ᏼ( f ∗ ,g ∗ ) is solution of (5.30).
Aziz Belmiloudi 35
Next, we establish necessary optimality conditions for the robust control problem
(ᏹᏼ3 ).
Theorem 5.14. Under the assumptions of Theorem 3.1, the optimal solution ( f ∗ ,g ∗ ,u∗ ,
ϕ∗ ) ∈ × En × Ᏹ, such that ( f ∗ ,g ∗ ) is defined by (ᏹᏼ3 ) and (ϕ∗ ,u∗ ) = ᏼ( f ∗ ,g ∗ ) is
solution of (5.30), satisfies
ρQ∗ (0) + α f ∗ ( f ∗ − f )dx ≥ 0,
Ω
Ω
ηρP ∗ (0) − γg ∗ (g ∗ − g) dx ≤ 0,
(5.33)
∀( f ,g) ∈ ,
where (P ∗ ,Q∗ ) is solution of the adjoint problem (5.8) (corresponding to (ϕ∗ ,u∗ )).
Proof. The cost function J is a composition of (Fréchet) differentiable maps, then J is
differentiable and we have (∀Y = (β1 ,β2 ) ∈ )
J ( f ,g) · Y = a
ᏽ
+α
|ϕ|2 − Λ ϕψ dx dt + b
Ω
f β1 dx − γ
u − uobs w dx dt
ᏽ
(5.34)
gβ2 dx,
Ω
where (ψ,w) = ᏼ ( f ,g) · Y is solution of problem (ᏼF3 ).
By taking (q,v) = (P,Q) in (ᏼF3 ) and integrating by time, we obtain (according to the
homogeneous boundary conditions and to the initial condition)
∂P
−η
ρ ψ dx dt +
ᏽ ∂t
Ω
+ iηκ
+
ᏽ
+
−
ᏽ
ρ
ᏽ
ᏽ
ᏽ
+
ᏽ
Σ
2
Ω
ρφ1 wB(u)(P)dx dt +
ρψP dΓdt +
ᏽ
ηρP(0)β2 dx − iηκ
ᏽ
div ρU1 Pψ dx dt
ρB(u)(P)B(u)(ψ)dx dt
ᏽ
ρB(u) φ1 wP dx dt
ρ 2φ1 − 1 Pψ + φ12 Pψ dx dt = 0,
ηρP(T)ψ(T)dx −
ρw∇ φ1 P dx dt − iμ
∂Q
w dx dt +
∂t
+
Ω
ρQ(T)w(T)dx −
div(Q)div(ρw)dx dt +
Ω
ρQ(0)β1 dx +
ᏽ
ᏽ
ρ curl(Q)curl(w)dx dt
ρ ψB(u) φ1 Q dx dt
2 ρ φ1 B(u)(ψ) Q + wφ1 Q dx dt = 0.
(5.35)
36
Robust control of Ginzburg-Landau models
Since (P,Q) is solution of (5.8), we have that
−
Ω
ηρP(0)β2 dx + iηκ
Ω
ᏽ
ρw∇ φ1 P dx dt +
ρφ1 wB(u)(P)dx dt
ᏽ
ρQ(0)β1 dx +
−
ᏽ
ᏽ
+b
ρ
− φ1 Pψ dx dt −
ρB(u) φ1 Qψ dx dt
ᏽ
ᏽ
ᏽ
2
i
−
− div ρφ1 Q + ρU1 φ1 Q ψ dx dt + a
|ϕ| − Λ ϕψ dx dt = 0,
κ
ᏽ
ᏽ
ρB(u) φ1 wP dx dt +
+
−
2
φ12 Pψ
ρ ψB(u) φ1 + φ1 B(u)(ψ) Q dx dt
ρ iηκ∇ φ1 P + PB(u) φ1 + φ1 B(u)(P) w dx dt
ᏽ
u − uobs w dx dt = 0.
(5.36)
By adding the real part of the first part of (5.36) and the second part of (5.36), we obtain
a
ᏽ
|ϕ|2 − Λ ϕψ dx dt + b
=
Ω
ρQ(0)β1 dx +
ᏽ
Ω
u − uobs w dx dt
(5.37)
ηρ P(0)β2 dx.
According to the expression of J ( f ,g) · Y , we can deduce that
J ( f ,g) · Y =
Ω
ρQ(0) + α f β1 dx +
Ω
ηρP(0) − γg β2 dx.
(5.38)
Since ( f ∗ ,g ∗ ) is an optimal solution we have then
Ω
Ω
ρQ∗ (0) + α f ∗ ( f ∗ − f )dx ≥ 0,
ηρP ∗ (0) − γg ∗ (g ∗ − g) dx ≤ 0,
(5.39)
∀( f ,g) ∈ .
This completes the proof.
5.2.2. Distributed disturbance in the external magnetic field. In this section, the disturbance is in h and the control is in u0 , that is, u0 = f ( f ∈ L2 (Ω)), h = g (g ∈ L2 (ᏽ)). So
the function (ϕ,u) is assumed to be related to the disturbance g and control f through
the problem (3.3) (a.e. t ∈ (0,T)):
∂ϕ
η ρ q dx − iηκ
Ω ∂t
+
Ω
Ω
div ρ(u + U) ϕq dx − iηκ
ρB(u)(ϕ + φ)B(u)(q)dx +
Ω
Ω
div(ρu)φq dx − iμ
ρF(ϕ)qdx =
Ω
Γ
ρϕq dΓ
ρB(0)(φ)B(0)(q)dx,
Aziz Belmiloudi 37
Ω
ρ
∂u
v dx +
∂t
Ω
+
ρ curl(u)curl(v)dx +
Ω
Ω
div(ρu)div(v)dx
ρ ϕ + φ B(u)(ϕ + φ) v dx =
Ω
ρ φB(0)(φ) v dx +
Ω
ρg curl(v)dx,
ϕ(0),u(0) = ϕ0 , f .
(5.40)
2 (Ω). Let ᏼ : ( f ,g) →
To obtain the regularity of Theorem 4.2, we suppose that ϕ0 ∈ ᏸ∞
2
2
(ϕ,u) = ᏼ( f ,g) be the map: L (Ω) × L (ᏽ) → Ᏹ × En defined by (5.40) and the cost function is defined by
2
2
γ
b
α
a
J( f ,g) = |ϕ|2 − Λ
L2 (ᏽ) + u − uobs L2 (ᏽ) + f 2L2 − g 2L2 (ᏽ) ,
4
2
2
2
(5.41)
where α,γ > 0, a,b ≥ 0 and a + b > 0. The functions (uobs ,Λ) ∈ L2 (ᏽ) × L∞ (ᏽ) are given.
In this section, we study the following minimax control problem (ᏹᏼ4 ):
find an admissible control f ∗ ∈ 1 and a disturbance g ∗ ∈ 2 such that
( f ∗ ,g ∗ ) is a saddle point of the functional J on , subject to system
(5.40),
where, = 1 × 2 such that 1 and 2 are nonempty, closed, convex, bounded subsets
of L2 (Ω) and L2 (ᏽ), respectively.
The proof of the following propositions and theorem of existence is obtained by using
similar arguments of Section 5.1, so we omit the details.
Proposition 5.15. The function ᏼ is continuously Fréchet differentiable from L2 (Ω) ×
L2 (ᏽ) to Ᏹ × En with the derivative ᏼ ( f ,g) : Y = (β1 ,β2 ) → (ψ,w) given by the linear
problem (P F4 ) (a.e. t ∈ (0,T)):
η
Ω
ρ
∂ψ
q dx − iηκ
∂t
+
+
Ω
ρ
Ω
div(ρU1 )ψq dx − iηκ
Ω
Ω
Ω
Ω
Γ
ρψq dΓ
ρB(u) φ1 wq dx
ρ 2|ϕ|2 − 1 ψ + ϕ2 ψ q dx = 0,
Ω
ρ curl(w)curl(v)dx +
Ω
div(ρw)div(v)dx +
2 ρ φ1 B(u)(ψ) + wφ1 v dx =
Ω
div(ρw)φ1 q dx − iμ
ρ B(u)(ψ) + φ1 w B(u)(q)dx +
∂w
udx +
∂t
+
Ω
Ω
ρ ψB(u) φ1 v dx
ρβ2 curl(v)dx,
ψ(0),w(0) = 0,β1 ,
(5.42)
where (U1 ,φ1 ) = (u + U,ϕ + φ).
38
Robust control of Ginzburg-Landau models
Moreover the following estimates (∀( fi ,gi ) ∈ L2 (Ω) × L2 (ᏽ), i = 1,2) exist:
(i) ᏼ ( f1 ,g1 )ᏸ(L2 ×L2 (ᏽ),Ᏹ×En ) ≤ Ce ,
(ii) ᏼ(f1 ,g1)Y − ᏼ(f2 ,g2)Y2Ᏹ×En≤Ce(XL2 ×L2 (ᏽ)Y2L2 ×L2 (ᏽ)+ X2L2 ×L2 (ᏽ) YL2 ×L2 (ᏽ)),
where f = f1 − f2 , g = g1 − g2 and X = ( f ,g).
Proposition 5.16. The map ᏼ defined by (5.40) is continuous from the weak topology of
L2 (Ω) × L2 (ᏽ) to the strong topology of ᏸ2 (ᏽ) × L2 (ᏽ).
Theorem 5.17. For α and γ sufficiently large, there exist ( f ∗ ,g ∗ ) ∈ and (u∗ ,ϕ∗ ) ∈
En × Ᏹ such that ( f ∗ ,g ∗ ) is defined by (ᏹᏼ4 ) and (ϕ∗ ,u∗ ) = ᏼ( f ∗ ,g ∗ ) is solution of
(5.40).
Next we give necessary optimality conditions for the robust control problem (ᏹᏼ4 ).
Theorem 5.18. Under the assumptions of Theorem 5.8, the optimal solution ( f ∗ ,g ∗ ,u∗ ,
ϕ∗ ) ∈ × En × Ᏹ, such that ( f ∗ ,g ∗ ) is defined by (ᏹᏼ4 ) and (ϕ∗ ,u∗ ) = ᏼ( f ∗ ,g ∗ ) is
solution of (5.40), satisfies
Ω
ᏽ
ρQ∗ (0) + α f ∗ ( f ∗ − f )dx ≥ 0,
ρ curl(Q∗ ) − γg ∗ g ∗ − g dx dt ≤ 0,
∀( f ,g) ∈ ,
(5.43)
where (P ∗ ,Q∗ ) is solution of the adjoint problem (5.8) (corresponding to (ϕ∗ ,u∗ )).
Proof. The cost function J is a composition of (Fréchet) differentiable maps, then J is
differentiable and we have (∀Y = (β1 ,β2 ) ∈ )
J ( f ,g) · Y = a
ᏽ
+α
|ϕ|2 − Λ ϕψ dx dt + b
Ω
f β1 dx − γ
ᏽ
ᏽ
u − uobs w dx dt
(5.44)
gβ2 dx dt,
where (ψ,w) = ᏼ ( f ,g) · Y is solution of problem (ᏼF4 ).
By taking (q,v) = (P,Q) in (ᏼF4 ), using Green’s formula, and integrating by time, we
obtain (according to the homogeneous boundary conditions and to the initial condition)
−η
ᏽ
ρ
∂P
ψ dx dt + η
∂t
Ω
ρP(T)ψ(T)dx
− iηκ
div(ρU1 )Pψ dx dt + iηκ
ρw∇ φ1 P dx dt
ᏽ
ᏽ
− iμ ρψP dΓ +
ρB(u)(P)B(u)(ψ)dx dt +
ρφ1 wB(u)(P)dx dt
Γ
ᏽ
ᏽ
2
ρB(u) φ1 wP dx dt +
ρ 2φ1 − 1 Pψ + φ12 Pψ dx dt = 0,
+
ᏽ
ᏽ
Aziz Belmiloudi 39
−
ᏽ
ρ
∂Q
w dx dt +
∂t
Ω
+
ᏽ
+
Ω
div(Q)div(ρw)dx dt +
ρQ(0)β1 dx +
ᏽ
ᏽ
ρ curl(Q)curl(w)dx dt
ρ ψB(u) φ1 Q dx dt
2 ρ φ1 B(u)(ψ) Q + wφ1 Q dx dt =
ᏽ
ρQ(T)w(T)dx −
ᏽ
ρβ2 curl(Q)dx dt.
(5.45)
Since (P,Q) is solution of (5.8), we have that
iηκ
ᏽ
+
ᏽ
ρ
−
ᏽ
−
Ω
ρw∇ φ1 P dx dt +
φ12 Pψ
+b
− φ1 Pψ dx dt −
ᏽ
ᏽ
ᏽ
ρ ψB(u) φ1 Q dx dt +
ρB(u) φ1 wP dx dt
ρB(u) φ1 Qψ dx dt
ᏽ
ᏽ
2
i
− div ρφ1 Q + ρU1 φ1 Q ψ dx dt + a
κ
ρQ(0)β1 dx +
−
ρφ1 wB(u)(P)dx dt +
ᏽ
ᏽ
2
|ϕ| − Λ ϕψ dx dt = 0,
ρ φ1 B(u)(ψ) Q dx dt
ρ iηκ∇ φ1 P dx dt + PB(u) φ1 + φ1 B(u)(P) w dx dt
u − uobs w dx dt =
ᏽ
ᏽ
ρβ2 curl(Q)dx dt.
(5.46)
By adding the real part of the first part of (5.46) and the second part of (5.46), we obtain
−
Ω
ρQ(0)β1 dx + a
ᏽ
=
ᏽ
|ϕ|2 − Λ ϕψ dx dt + b
ᏽ
u − uobs w dx dt
(5.47)
ρβ2 curl(Q)dx dt.
According to the expression of J ( f ,g) · Y , we can deduce that
J ( f ,g) · Y =
Ω
ρQ(0) + α f β1 dx +
ᏽ
ρ curl(Q) − γg β2 dx dt.
(5.48)
Since ( f ∗ ,g ∗ ) is an optimal solution, we obtain
ᏽ
Ω
ρQ∗ (0) + α f ∗ ( f ∗ − f )dx ≥ 0,
ρ curl(Q∗ ) − γg ∗ (g ∗ − g)dx dt ≤ 0,
This completes the proof.
∀( f ,g) ∈ .
(5.49)
40
Robust control of Ginzburg-Landau models
Remark 5.19. In the case where the distributed disturbance is in the initial condition of
the potential, we obtain the same results. In this case the cost functional is given by
2
2
γ
b
α
a
J( f ,g) = |ϕ|2 − Λ
L2 (ᏽ) + u − uobs L2 (ᏽ) + f 2L2 − g 2L2 ,
4
2
2
2
(5.50)
where α,γ > 0, a,b ≥ 0 and a + b > 0.
We can prove also an existence theorem of the robust control problem and obtain
necessary optimality conditions for its solution using the same method. Let = 1 × 2
such that 1 and 2 are nonempty, closed, convex, bounded subsets of L2 (Ω).
For α and γ sufficiently large, there exists ( f ∗ ,g ∗ ,ϕ,u) satisfying
η
ρ
Ω
∂ϕ
q dx − iηκ
∂t +
=
Ω
Ω
=
Ω
Ω
ρB(0)(φ)B(0)(q)dx,
Ω
Ω
Ω
Γ
ρϕP dΓ
ρF(ϕ)q dx
Ω
ρ curl(u)curl(v)dx +
Ω
div(ρu)div(v)dx
ρ ϕ + φ B(u)(ϕ + φ) v dx
ϕ(0),u(0) = ϕ0 , f ∗ + g
Ω
Ω
div(ρu)φq dx − iμ
a.e. t ∈ (0,T)
ρ φB(0)(φ) v dx dt +
div ρ(u + U) ϕq dx − iηκ
ρB(u)(ϕ + φ)B(u)(q)dx +
∂u
ρ v dx +
Ω ∂t
+
∗
ρQ(0) + α f
∗
Ω
ρhcurl(v)dx,
a.e. t ∈ (0,T)
,
( f ∗ − f )dx ≥ 0,
ρQ(0) − γg ∗ (g ∗ − g)dx ≤ 0,
∀( f ,g) ∈ ,
(5.51)
where (P,Q) is solution of (5.8).
6. Conclusion
We have developed a robust control method for the time-dependent complex GinzburgLandau vortices in superconductivity. This model contains two unknowns, the vector
potential u and an order parameter ϕ (or a complex phase-field variable) coming from
thermodynamics, where ϕ describes the phase of the underlying superconductivity. The
case |ϕ| close to 1 corresponds to the superconducting phase, |ϕ| close to 0 to the normal phase. The existence of weak solution as well as regularity and stability results are
established. A robust control problem has been studied for two sets of distributed controls: firstly the control is in the external magnetic field (the disturbance is in the external
magnetic field or in the initial condition of the parameter), secondly the control is in the
initial condition of the vector potential (the disturbance is in the external magnetic field
or in the initial condition of the parameter). Under suitable hypotheses, it is shown that
Aziz Belmiloudi 41
one has existence of solution to a corresponding robust control problem, and the appropriate necessary conditions for saddle point optimality are obtained. These conditions
are corresponding to identify the gradient of the cost functional that is very useful in the
numerical resolution of the robust control problem. For example we can combining the
optimal necessary conditions obtained in this paper and the gradient-iterative algorithm
to solve the robust control problem numerically (at each iteration i, we obtain the numerical approximation ( fi ,gi ) of the optimal solution ( f ,g) by fi = fi−1 − θJ f ( fi−1 ,gi−1 ) and
gi = gi−1 + ωJg ( fi−1 ,gi−1 ), where 0 < m ≤ θ, ω ≤ M are the sequences of step lengths and
m, M depending on the second Fréchet derivative of J to ensure the convergence result
(see, e.g., Ciarlet [16])).
References
[1] A. A. Abrikosov, On the magnetic properties of superconductors of the second group, Soviet Physics
JETP 5 (1957), no. 6, 1174–1182.
[2] R. A. Adams, Sobolev Spaces, Pure and Applied Mathematics, vol. 65, Academic Press, New York,
1975.
[3] V. Barbu and T. Precupanu, Convexity and Optimization in Banach Spaces, 2nd ed., Mathematics
and Its Applications (East European Series), vol. 10, D. Reidel, Dordrecht; Editura Academiei
Republicii Socialiste România, Bucharest, 1986.
[4] J. Bardeen, L. N. Cooper, and J. R. Schrieffer, Theory of superconductivity, Physical Review 108
(1957), 1175–1204.
[5] A. Belmiloudi, Analysis of robust control problems for a quasilinear parabolic equations, Proceedings of the 9th IEEE MMAR, “Optimisation of Infinite Dimensional Systems” (Miedzyzdroje,
2003) (S. Domek and R. Kaszynski, eds.), Wydawnictwo Uczelniane Politechniki Szczecińskiej,
2003, pp. 99–108.
, Nonlinear robust control problems of parabolic type equations with time-varying delays
[6]
given in the integral form, Journal of Dynamical and Control Systems 9 (2003), no. 4, 469–512.
, Robust control problems associated with time-varying delay nonlinear parabolic equations,
[7]
IMA Journal of Mathematical Control and Information 20 (2003), no. 3, 305–334.
, Robust and optimal control problems to a phase-field model for the solidification of a
[8]
binary alloy with a constant temperature, Journal of Dynamical and Control Systems 10 (2004),
no. 4, 453–499.
[9] F. Bethuel, H. Brezis, and F. Hélein, Ginzburg-Landau Vortices, Progress in Nonlinear Differential
Equations and Their Applications, vol. 13, Birkhäuser Boston, Massachusetts, 1994.
[10] M. W. Cantoni and K. Glover, Gap-metric robustness analysis of linear periodically time-varying
feedback systems, SIAM Journal on Control and Optimization 38 (2000), no. 3, 803–822.
[11] S. J. Chapman, A hierarchy of models for type-II superconductors, SIAM Review 42 (2000), no. 4,
555–598.
[12] S. J. Chapman, J. Rubinstein, and M. Schatzman, A mean-field model of superconducting vortices,
European Journal of Applied Mathematics 7 (1996), no. 2, 97–111.
[13] Z. Chen and K.-H. Hoffmann, Numerical studies of a non-stationary Ginzburg-Landau model for
superconductivity, Advances in Mathematical Sciences and Applications 5 (1995), no. 2, 363–
389.
, Optimal control of dynamical Ginzburg-Landau vortices in superconductivity, Numerical
[14]
Functional Analysis and Optimization 17 (1996), no. 3-4, 241–258.
[15] Z. Chen, K.-H. Hoffmann, and J. Liang, On a nonstationary Ginzburg-Landau superconductivity
model, Mathematical Methods in the Applied Sciences 16 (1993), no. 12, 855–875.
42
Robust control of Ginzburg-Landau models
[16] P. G. Ciarlet, Introduction to Numerical Linear Algebra and Optimisation, Cambridge Texts in
Applied Mathematics, Cambridge University Press, Cambridge, 1989.
[17] E. Coskun and M. K. Kwong, Simulating vortex motion in superconducting films with the timedependent Ginzburg-Landau equations, Nonlinearity 10 (1997), no. 3, 579–593.
[18] W. N. Dale and M. C. Smith, Stabilizability and existence of system representations for discretetime time-varying systems, SIAM Journal on Control and Optimization 31 (1993), no. 6, 1538–
1557.
[19] K. Deckelnick, C. M. Elliott, and G. Richardson, Long time asymptotics for forced curvature flow
with applications to the motion of a superconducting vortex, Nonlinearity 10 (1997), no. 3, 655–
678.
[20] Q. Du, Global existence and uniqueness of solutions of the time-dependent Ginzburg-Landau model
for superconductivity, Applicable Analysis 53 (1994), no. 1-2, 1–17.
[21] Q. Du and M. D. Gunzburger, A model for superconducting thin films having variable thickness,
Applicable Analysis 5 (1992), 363–389.
[22] Q. Du, M. D. Gunzburger, and J. S. Peterson, Analysis and approximation of the Ginzburg-Landau
model of superconductivity, SIAM Review 34 (1992), no. 1, 54–81.
[23] I. Ekeland and R. Temam, Convex Analysis and Variational Problems, North-Holland, Amsterdam, 1976.
[24] C. Foias, H. Özbay, and A. Tannenbaum, Robust Control of Infinite-Dimensional Systems. Frequency Domain Methods, Lecture Notes in Control and Information Sciences, vol. 209, Springer,
Berlin, 1996.
[25] T. T. Georgiou, Differential stability and robust control of nonlinear systems, Mathematics of Control, Signals, and Systems 6 (1993), no. 4, 289–306.
[26] T. T. Georgiou and M. C. Smith, Robustness analysis of nonlinear feedback systems: an inputoutput approach, IEEE Transactions on Automatic Control 42 (1997), no. 9, 1200–1221.
[27] V. Girault and P.-A. Raviart, Finite Element Methods for Navier-Stokes Equations, Springer Series
in Computational Mathematics, vol. 5, Springer, Berlin, 1986.
[28] L. P. Gor’kov and G. M. Eliashberg, Generalization of the Ginzburg-Landau equations for nonstationary problems in the case of alloys with paramagnetic impurities, Soviet Physics JETP 27
(1968), 328–334.
[29] M. Green and D. J. N. Limebeer, Linear Robust Control, Prentice-Hall, New Jersey, 1995.
[30] W. D. Gropp, H. G. Kaper, G. K. Leaf, D. M. Levine, M. Palumbo, and V. M. Vinokur, Numerical
simulation of vortex dynamics in type-II superconductors, Journal of Computational Physics 123
(1996), no. 2, 254–266.
[31] C. Hu and R. Temam, Robust control of the Kuramoto-Sivashinsky equation, Dynamics of Continuous, Discrete & Impulsive Systems. Series B. Applications & Algorithms 8 (2001), no. 3,
315–338.
[32] O. A. Ladyzenskaya, V. A. Solonnikov, and N. N. Uralceva, Linear and Quasilinear Equations Parabolic Type, Transl. Math. Monographs, vol. 23, American Mathematical Society, Rhode Island,
1968.
[33] J.-L. Lions, Équations différentielles opérationnelles et problèmes aux limites, Die Grundlehren der
Mathematischen Wissenschaften, vol. 111, Springer, Berlin, 1961.
[34] J.-L. Lions and E. Magenes, Problèmes aux limites non homogènes et applications. Vol. 1, Travaux
et Recherches Mathématiques, no. 17, Dunod, Paris, 1968.
, Problèmes aux limites non homogènes et applications. Vol. 2, Travaux et Recherches
[35]
Mathématiques, no. 18, Dunod, Paris, 1968.
[36] B. S. Mordukhovich and K. Zhang, Minimax control of parabolic systems with Dirichlet boundary
conditions and state constraints, Applied Mathematics and Optimization 36 (1997), no. 3, 323–
360.
Aziz Belmiloudi 43
[37] J. Reinschke, M. W. Cantoni, and M. C. Smith, A robust control framework for linear, timeinvariant, spatially distributed systems, SIAM Journal on Control and Optimization 40 (2001),
no. 2, 610–627.
[38] E. Sandier and S. Serfaty, Ginzburg-Landau minimizers near the first critical field have bounded
vorticity, Calculus of Variations and Partial Differential Equations 17 (2003), no. 1, 17–28.
[39] Q. Tang and S. Wang, Long time behavior of the Ginzburg-Landau superconductivity equations,
Applied Mathematics Letters 8 (1995), no. 2, 31–34.
[40] K. Zhou, J. C. Doyle, and K. Glover, Robust and Optimal Control, Prentice-hall, New Jersey, 1996.
Aziz Belmiloudi: Institut de Recherche Mathématique de Rennes (IRMAR), Université de Rennes1,
35042 Rennes Cedex, France; Center de Maths, Institut National des Sciences, Appliquées (INSA),
20 Avenue des Buttes de Coësmes, CS 14315, 35043 Rennes Cedex, France
E-mail address: aziz.belmiloudi@insa-rennes.fr