Instrumentation for quantum computers
by
Wei-Han Huang
Submitted to the Department of Electrical Engineering and Computer
Science
in partial fulfillment of the requirements for the degree of
Master of Science in Electrical Engineering and Computer Science
at the
MASSACHUSETTS INSTITUTE OF TECHNOLOGY
December 2003
@ Massachusetts Institute of Technology 2003. All rights reserved.
Author.
..
Department o'
... ........ .... ........ ............
ctrical Engineering and Computer Science
December 12, 2003
....... ..................
Certified by.
Isaac L. Chuang
Associate Professor
Thesis Supervisor
Accepted by .............
Chairman, Department Committee on Graduate Theses
MASSACHUSETTS INSTiTUTE
OF TECHNOLOGY
APR 1BARKER
LIBRARIES
Instrumentation for quantum computers
by
Wei-Han Huang
Submitted to the Department of Electrical Engineering and Computer Science
on December 12, 2003, in partial fulfillment of the
requirements for the degree of
Master of Science in Electrical Engineering and Computer Science
Abstract
Quantum computation poses challenging engineering and basic physics issues for the
control of nanoscale systems. In particular, experimental realizations of up to sevenqubit NMR quantum computers have acutely illustrated how quantum circuits require
extremely precise control instrumentation for pulsed excitation.
In this thesis, we develop two general-purpose, low-cost pulse programmers and
two Class E power amplifiers, designed for precise control of qubits and complex pulse
excitation. The first-generation pulse programmer has timing resolutions of 235 ns,
while the second-generation one has resolutions of 10 ns. The Class E power amplifier
has ps transient response times, a high quality-factor, and a small form factor.
The verification of the pulse programmer and the Class E power amplifier is
demonstrated using a customized nuclear quadrupole resonance (NQR) spectrometer, which incorporates both devices. The two devices control the generation of RF
pulses used in NQR experiments on paradichlorobenzene (C 6 H 4C1 2 ) and sodium ni35
trite (NaNO 2 ). The NQR signals originating from 14 N in sodium nitrite and from C1
in paradichlorobenzene are measured using the NQR spectrometer. The pulse programmer and the Class E power amplifier represent first steps towards development
of practical NMR quantum computers.
Thesis Supervisor: Isaac L. Chuang
Title: Associate Professor
3
4
Acknowledgments
During my senior year in undergraduate studies, I was introduced to a fascinating
subject - Quantum computation.
It involved all the subjects I loved - computer
science, electrical engineering, and quantum physics. Since coming to MIT, I had the
opportunity to continue my interest and learn more about the science. The past two
years has been an amazing learning experience, both in life and academics.
My advisor, Isaac Chuang has been a great inspiration. His wealth of knowledge
in the field has helped guide the work conducted in this thesis, and he has taught me
how to motivate my work and put it into perspective. His actions has set an example
for me on how to conduct myself as a scientist.
I would like to thank my lab mates in the Quanta group for being both a wonderful
source of support and friendship. I would like to thank Jeff Brock for being a great
friend both in and out of the lab. I wish Jeff and Amy's beautiful, baby girl LucyClare good health and a long, happy life. One of the nicest friends I have known is
Murali Kota - thanks for the many interesting late night dinner conversations and
Sunday lunches about physics. The old man of our group, Matthias Steffen, has been
a wonderful source for guidance. His advice on oral and writing presentations has been
extremely helpful. Terri Yu's suggestion on taking 8.321 was a great idea. The class
gave me better intuition about quantum physics. My UROP student Zilong Chen has
been a great help. He is a superposition of both theorist and experimentalist. What
can I say about Andrew Houck? His silly antics have always been a source for laughs.
Josh Folk, Andy's boss, is an incredible experimentalist as well as a BBQ chef. Many
thanks also to Aram, Francois, Andrew Cross, and Joshusa Powell for being great
group members and amazing theorists.
Working at NIST over the summer of 2003, I found John Martinis to be a great
source of knowledge about electronics and Josephson junctions. I greatly appreciate
his hospitality as well as his family's. John's excitement and energy shines through
day after day. To the NIST crew, Ray Simmons, Robert McDermott, and Dave
Pappas - thanks for the interesting conversation both about science, politics, and ape
5
behavior. Steve Waltman is truly a master of analog electronics, especially microwave
electonics.
electronics.
Every conversation I have had with him, I have learned
something new. Special thanks to Rebecca Tarantino for putting up with me over
the summer and being the best roommate that I have ever had.
To my closest friends from undergraduate:
thank you Willy, Phil, Cindy, and
Raymond for coming up and visiting, time to time, and keeping me grounded.
Finally, I would like to thank my family for their support and guidance. To mom,
dad, SueBee, Linda, Amy, Will, AK, Dave, Kay, Mike, and the two newest members
of our family Momo (Emily) and Giddy (Allison).
6
Contents
1
2
19
Introduction
1.1
Historical background . . .
19
1.2
Purpose of my work . . . .
21
1.2.1
Pulse programmer
22
1.2.2
Class E amplifier
23
1.2.3
Nuclear quadrupole resonance spectrometer
23
1.3
Organization of thesis . . .
24
1.4
Contributions
. . . . . . .
25
1.5
Literature
. . . . . . . . .
26
Background: Theory of Quantum Computation
29
2.1
Axioms of quantum mechanics . . . . . . .
29
2.2
Quantum bits ...................
32
2.3
Multiple qubits . . . . . . . . . . . . . . .
33
2.4
Computation using quantum systems . . .
34
2.4.1
Entanglement . . . . . . . . . . . .
34
2.4.2
Quantum parallelism and quantum measurement
35
2.5
2.6
. . . . . . . .
36
2.5.1
Unitary evolution . . . . . . . . . .
36
2.5.2
Single-qubit gates . . . . . . . . ..
37
2.5.3
Two-qubit gates . . . . . . . . . ..
40
. . . . . . . . . . .
42
Quantum gates and circuits
Quantum algorithms
2.6.1
Shor's algorithm
44
. .
7
2.7
3
Sum m ary
46
Nuclear Magnetic Resonance Quantum Computing
49
3.1
NMR historical background .....
.......................
50
3.2
NMR quantum computing ......
........................
51
3.3
3.2.1
NMR quantum computer: the physical system .........
51
3.2.2
RF pulses perform quantum operations . . . . . . . . . . . . .
53
NM R spectrom eter
. . . . . . . . . . . . . . . . . . . . . . . . . . . .
55
Transmitter: pulse programmer and power amplifier . . . . . .
57
NM R experiments . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
59
3.4.1
Experimental realization of Shor's algorithm . . . . . . . . . .
59
3.4.2
The experiment and the importance of the pulse programmer
60
3.3.1
3.4
3.5
3.6
4
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Instrumentation issue for quantum computers
. . . . . . . . . . . . .
63
3.5.1
NMR readout: measurement . . . . . . . . . . . . . . . . . . .
63
3.5.2
Transient data acquisition
. . . . . . . . . . . . . . . . . . . .
64
3.5.3
Recovery tim e . . . . . . . . . . . . . . . . . . . . . . . . . . .
65
Sum mary
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Class E Amplifier
4.1
66
67
History of the Class E amplifier . . . . . . . . .
. . . . .
67
4.1.1
Motivation: a solution to increasing SNR
. . . . .
70
4.2
Operation and design . . . . . . . . . . . . . . .
. . . . .
70
4.3
Design equations
. . . . . . . . . . . . . . . . .
. . . . .
73
4.4
Class E amplifier characteristics . . . . . . . . .
. . . . .
75
4.4.1
. . . . . . . . .
. . . . .
78
. . . . . . . . . . . . . . . . . . . . .
. . . . .
79
4.5
Measurement difficulties
Sum m ary
5 Pulse Programmer
5.1
81
Problem and approach . . . . . . . . . . . . . . . . . . . . . . . . . .
81
5.1.1
Introduction to the pulse programmer . . . . . . . . . . . . . .
82
5.1.2
A case study: the Varian pulse programmer
83
8
. . . . . . . . . .
5.2
Designing an NMR quantum computer pulse programmer . .
88
5.3
First-generation pulse programmer
. . . . . . . . . . . . . .
88
5.3.1
Architecture of first-generation pulse
program m er . . . . . . . . . . . . . . . . . . . . . . .
5.3.2
Hardware implementation of first-generation pulse
program mer . . . . . . . . . . . . . . . . . . . . . . .
5.3.3
5.4
program mer . . . . . . . . . . . . . . . . . . . . . . .
95
. . . . . . . . . . . . .
97
Architecture of second-generation pulse
program m er . . . . . . . . . . . . . . . . . . . . . . .
5.4.2
5.5
98
Software implementation of second-generation pulse
program m er . . . . . . . . . . . . . . . . . . . . . . .
5.4.4
97
Hardware implementation of second-generation pulse
program m er . . . . . . . . . . . . . . . . . . . . . . .
5.4.3
93
Performance evaluation of first-generation pulse
Second-generation pulse programmer
5.4.1
90
Software implementation of first-generation pulse
program mer . . . . . . . . . . . . . . . . . . . . . . .
5.3.4
88
99
Performance evaluation of second-generation pulse
program m er . . . . . . . . . . . . . . . . . . . . . . .
110
. . . . . . . . . . . . . . . . . . . . . . . . . . . .
112
Sum m ary
113
6 NQR Testbed
6.1
NQR spectrometer ........
. . . . . . . . . . . 114
6.2
Impedance matching probe . . .
. . . . . . . . . . . 115
6.2.1
LC resonator as a probe
6.2.2
Probe design
. . . . . . . . . . . 116
. . . . . .
. . . . . . . . . . . 119
. . . . . . . .
. . . . . . . . . . . 123
6.3
Pin diode switch
6.4
Receiver . . . . . . . . . . . . .
. . . . . . . . . . .
127
6.4.1
Homodyne receiver . . .
. . . . . . . . . . .
127
6.4.2
Heterodyne receiver . . .
. . . . . . . . . . .
128
9
7
6.5
Experiment
6.6
Summary
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
129
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
132
Conclusions
7.1
135
Future Prospects: pulse programmer
. . . . . . . . . . . . . . . . .
A NQR Theory
136
139
A.1
NQR historical background ...........
. . . . . . . . . . . . .
139
A.2
Qualitative comparisons of NMR and NQR . . . . . . . . . . . . . .
140
A.3
NQR Hamiltonian and resonance frequencies . . . . . . . . . . . . .
141
A.4 Pure NQR selection rules ..............
. . . . . . . . . . . . .
143
A.5 RF excitation and effective signal averaging
. . . . . . . . . . . . .
146
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
148
A.6
Summary
B Appendix A: First Generation Code
B.1 Source code . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
151
157
C VHDL Pulse Programmer
173
D Probes
199
E Class E amplifier
205
10
List of Figures
2-1
(a) Bloch sphere representation of the state 1,0) of a single qubit. (b)
The position in the Bloch sphere of five important states. The states
are not norm alized. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-2
33
Quantum circuit representation of (a) an arbitrary single-qubit rotation
U, and (b) the
NOT
gate. . . . . . . . . . . . . . . . . . . . . . . . . .
operation, and (b) the
operation. 40
2-3
Truth tables for (a) the
2-4
Quantum circuit representation of (a) a controlled-NOT gate, (b) a
CNOT 12
CNOT 2 1
40
zero-controlled-NOT, (c) a SWAP gate, and (d) a controlled-U gate.
The * symbol denotes the control qubit - the controlled operation is
only executed if the qubit is in the 1) state. The o symbol denotes the
zero-controlled qubit, i.e., the operation is only executed if the control
qubit is in the state 10).
2-5
. . . . . . . . . . . . . . . . . . . . . . . . .
Quantum circuit representation of a
TOFFOLI
gate and its decomposi-
tion into two-qubit gates. . . . . . . . . . . . . . . . . . . . . . . . . .
2-6
41
42
The quantum circuit which performs the order-finding algorithm in
Shor's algorithm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
46
3-1
Overview schematic of an NMR spectrometer [FR86]
56
3-2
Picture of an Oxford Instruments 500MHz narrow-bore NMR magnet
3-3
The NMR cabinet houses the transmitter and control electronics for
the Varian spectrometer.
3-4
. . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . .
57
58
Quantum circuit illustrating the order-finding algorithm in Shor's al-
gorithm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
11
60
3-5
The molecule hexafluoro butadiene is used as the NMR quantum computer in Shor's algorithm . . . . . . . . . . . . . . . . . . . . . . . . .
3-6
61
NMR pulse sequence for implementing Shor's algorithm to factor N=15
with seven qubits. The tall lines represent 90' pulses acting on one of
the seven qubits (horizontal lines) about the positive i (no cross),
negative , (lower cross) and positive
4-1
(top cross) axis.
. . . . . . .
A schematic of a Class E amplifier is shown. The resonant load network
circuit is used to tune the resonant frequency of the amplifier. ....
4-2
62
72
Example of ideal, transient waveforms for the input and output of the
Class E amplifier. When the gate is switched on, the voltage at the
drain VD decreases, while the voltage VOUT increases. When the gate
is switched off, VD rises and VOUT decreases. . . . . . . . . . . . . . .
72
4-3
The Class E amplifier schematic shown for amplifier tuned at 4.64 MHz. 75
4-4
Measurements of the voltages at the drain and the gate of the power
transistor are shown.
The drain voltage is about 3 times the gate
voltage, fitting closely with theoretical predictions . . . . . . . . . . .
4-5
77
The Class E amplifier shown for the amplifier constructed and tested.
The resonance frequency is 4.64MHz. . . . . . . . . . . . . . . . . . .
78
5-1
Structure of the Varian pulse programmer [VNMO1] . . . . . . . . . .
85
5-2
Block diagram of the first-generation pulse programmer.
90
5-3
The hardware uses a buffer to store the pulse sequence and access the
. . . . . . .
commands during execution. . . . . . . . . . . . . . . . . . . . . . . .
5-4
91
The Rabbit RCM2200 module used as the hardware for the firstgeneration pulse programmer.
. . . . . . . . . . . . . . . . . . . . . .
92
5-5
The daugther board customized for the Rabbit RCM2200 module. . .
92
5-6
The state machine for the rabbit pulse programmer. . . . . . . . . . .
95
5-7
Anatomy of a pulse sequence. Each operation has an associated overhead cost for processing a command. The larger the overhead time,
the higher the timing resolution. . . . . . . . . . . . . . . . . . . . . .
12
96
5-8
Structure of pulse programmer for the second-generation pulse program m er . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
98
.
100
5-10 Main framework for VHDL code . . . . . . . . . . . . . . . . . . . . .
101
5-9
Functional block diagram of Digilab 2E development board [Dig02]
5-11 The finite state machine for the pulse programmer entity. The initial state is the exit state. In this state, the pulse programmer loops
infinitely. When an enable signal is set, the state machine executes
command code fetched from the FIFO. . . . . . . . . . . . . . . . . .
104
5-12 UART data format. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
105
5-13 The finite state machine for the LED controller. The LED utilized is
on the Diligent Inc. D210 board.
. . . . . . . . . . . . . . . . . . . .
108
5-14 The main finite state machine shows the overall behavior of the pulse
program mer. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
109
5-15 At 100MHz, the minimum pulse width was 10 ns, which matched with
the predicted value. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6-1
110
A block diagram of an NQR spectrometer, illustrating the three main
components: the transmitter, probe, and receiver. The sample material
is placed in the coil.
6-2
. . . . . . . . . . . . . . . . . . . . . . . . . . .
115
LC matching network to the probe. When the capacitors are tuned
properly, impedance is matched to a 50Q coaxial line and power transfer is maxim ized.
6-3
. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Schematic of the matching network circuit used for analytic solution.
Rwire is the resistance of the wire. In the analysis Rwzre = 3Q.
6-4
117
The tuning and matching capacitors of the matching network.
. ..
.
118
The
capacitors are enclosed in a metal RF box to shield the system from
extraneous noise.
6-5
. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
119
A single coil used in the probe of the NQR spectrometer, where 1 is
the length of the coil. . . . . . . . . . . . . . . . . . . . . . . . . . . .
13
120
6-6
An example of a coil made using the described technique. The inductance of the coil is 9.7pH and the number of turns, N, is 32. . . . . .
6-7
121
The probe encapsulating the test tube and the coil. The sample material is placed in the test tube holder for NQR spectroscopy. . . . . .
122
6-8
The schematic of the pin diode switch. . . . . . . . . . . . . . . . . .
123
6-9
Design consideration: a notch filter forms when the PDS is shut off.
The resonance frequency of the notch filter must be considered in the
design of the system . . . . . . . . . . . . . . . . . . . . . . . . . . . .
124
6-10 The Bode plot of a poorly designed pin diode switch. The resonance
frequency is at 4.73MHz which is very close to the resonance frequency
of the matching network. Thus, small signals are attenuated by 1. . .
125
6-11 The transmission board containing: (1) RF mixers for producing gated
pulses, (2) a pin diode driver circuit, and (3) a pin diode switch. . . .
126
6-12 An example of a receiver chain is shown. A block diagram shown in
this figure corresponds to the real devices as seen on the right-hand side. 127
. . . . . . . . . . . . .
128
in paradichlorobenzene . . . . . .
130
. . . . . . . .
131
6-16 The data points from a nutation experiment on NaNO2 . . . . . . . .
132
6-13 A general schematic of a heterodyne receiver.
6-14 The FID signal produced from
3
1C1
6-15 The FID signal of NaNO 2 captured on an oscilloscope.
7-1
A block diagram of a pulse programmer designed for superconducting
Josephson-phase qubits.
A-1
. . . . . . . . . . . . . . . . . . . . . . . . .
137
A bessels function is the average FID signal induced in NQR experiments. A "7r/2" pulse is produced when wt is 0.667r. The amplitude is
normalized in this example.
. . . . . . . . . . . . . . . . . . . . . . .
148
B-1 Overview of the entire schematic for the first generation pulse programmer. The next 4 sections show full size schematic diagrams of the
daugther board. The sections start from left to right and move from
top to bottom .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
14
152
B-2 The top left corner schematic of the rabbit daugther . . . . . . . . . .
153
B-3 The top right corner schematic of the rabbit daugther board . . . . .
154
B-4 The bottom left corner schematic of the rabbit daugther board . . . .
155
B-5 The bottom right corner schematic of the rabbit daugther board . . .
156
. . . . . . . . . . . . .
172
B-6 The PCB layout of the rabbit daugther board
D-1 A die-cast Al RF box is used as the container for the probe and tuning
and matching capacitors.
Large copper sheet metal is used as the
wiring between components. Sheet metal is used to lower parasitic
inductance. The probe holder is a piece of paper rolled into a cylinder.
The coil is wrapped around the paper. The resonance frequency is
4.649MHz, with C1 = 260pF, C2 = 760pF, and L1 = 1.2pH.
. . . . .
200
D-2 The second probe utilizes similar construction methods as the first.
The major difference is variable air capacitors are used as the tuning
and matching capacitors. Use of the variable air capacitors turns out
to be a poor design choice, because the air capacitors have a lot of
undesired capacitively coupling to other components. The resonance
frequency was not attainable.
. . . . . . . . . . . . . . . . . . . . . .
201
D-3 The third probe is the same design as the first, except the length of
the coil is increased to maximize the
Q. The
length of the coil is the
same as the diameter of the coil, 0.78 inches. The resonant frequency
is 4.649MHz with C1 = 26pF, C2 = 95pF, and L, = 9.6uH. . . . . . .
202
D-4 The last probe is shown here with a 9.7pH coil. The coil slides over a
0.78 inch test tube which fits in the center of the copper cylinder. The
tuning and matching capacitors are described in section 6.2.1.
. ..
.
203
D-5 The mechanical drawings (completed in the software Omax) for the
probe (in Figure D-4) is show with lengths in units of inches.
. . . .
204
E-1 Protel schematic of a Class E amplifier tuned at 4.638MHz. A IRF510S
power transistor is used in the design.
15
. . . . . . . . . . . . . . . . .
206
E-2
Protel PCB layout for the Class E amplifier. The board is made to fit
into a NIM box. Additional debugging pins and thru holes (vias) are
added to the board. The back-to-back pin diode switches are incorporated into the design of the PCB. . . . . . . . . . . . . . . . . . . . .
207
E-3 Simulations of the Class E amplifier are completed in Protel. Here, the
voltage at the gate of the transistor (volt-b) is plotted along with the
voltage at the drain (v-out) and the voltage across the resistor (output). 208
16
List of Tables
2.1
The solution to order-finding problem is explicitly calculate for L
=
15.
Theorderof isr=2 for x=4. . . . . . . . . . . . . . . . . . . . . .
45
4.1
Dependence of P, R, V.c, and V on Qload [Sok98]
74
4.2
Parameters used for the design of a CEA. The resonance frequency is
tuned to 4.64M Hz.
4.3
. . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . .
75
Class E measurements: the measured and simulated values of the amplifier are shown in the table. The percent error is also displayed.
. .
78
5.1
Characteristics for evaluating the Varian pulse programmer . . . . . .
86
5.2
Characteristics for the Varian pulse programmer.
87
5.3
The performance of several lab-built pulse sequencers for various ap-
. . . . . . . . . . .
plications. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.4
87
The list of operational codes available to the RCM2200 pulse sequencer.
Currently port C is the only available output channel.
. . . . . . . .
93
. . . . . . . . . . .
96
5.5
Characteristics for the Rabbit pulse programmer.
5.6
Pulse sequence byte code and operational code for the pulse programmer. 102
5.7
Control code for the pulse programmer . . . . . . . . . . . . . . . . .
5.8
Characteristics for the second-generation pulse programmer. This table shows the parameters for clock speeds of 100MHz and 150MHz.
6.1
102
. 111
The calculated values used for NQR spectrometer matching network.
The resonance frequency of the circuit is 4.64MHz.
17
. . . . . . . . . .
119
18
Chapter 1
Introduction
"I'm not happy with all the analyses that go with just classical theory, because Nature
isn't classical, dammit, and if you want to make a simulation of Nature, you'd better
make it quantum mechanical, and by golly it's a wonderful problem!"
Quote from Richard Feynman [Fey8l]
1.1
Historical background
In 1947, research by Shockley, Bardeen and Brattain at Bell Labs led to the fortuitous discovery of the first solid state transistor [BB48].
The advent of transistors
ushered in a new era in modern computing. Soon after, integrated circuits were introduced. At that time, integrated circuits (ICs) yielded lower cost, higher reliability,
and simpler circuit designs than conventional electronics; consequently, the computing industry expanded rapidly. The burst in the field of digital computing led Moore
to propose that the number of transistors that could fit onto a square inch of silicon would double every 12 months [Moo65]. His prediction, known as Moore's Law,
has held surprisingly true for the past 30 years. But as the number of transistors in
microprocessors continued to increase, the sizes of transistors decreased in order to
maintain reasonable power efficiency and low costs. The shrinking sizes raised concern
among researchers. As technology continued to abide by Moore's Law, the sizes of
individual elements made their behavior increasingly affected by the laws of quantum
19
mechanics. Foreseeing this trend, researchers began to ponder the fundamental and
physical limits of computation.
In 1981, Feynman discussed the problem of simulating physics with computers
[Fey82].
He asked whether a universal, classical computer could simulate physics
exactly and efficiently. Then, he made a crucial insight. Instead of using classical
computers, he proposed using nature to simulate physics. Another words, rather than
a classical Turing machine, use a machine based on the laws of quantum mechanics
to perform simulations. He produced an abstract model illustrating how a quantum
system could be used to do computations.
As a result, research into the idea of
computational devices based on quantum mechanics quickly emerged.
Physicists and computer scientists explored the questions laid out by Feynman,
Deutsch, and Benioff [Fey82, Deu85, Ben82]. In 1985, Deutsch realized that Feynman's insight could lead to a general-purpose computer.
He extended the theory
of quantum computation with the development of the universal quantum computer
and the quantum Turing machine [Deu85]. The feasibility of a general-purpose quantum computer led scientists to investigate quantum algorithms. In 1992, Deutsch
and Jozsa discovered the Deutsch-Jozsa algorithm [DJ92], which suggested quantum
computers might be capable of efficiently solving mathematically hard problems.
Then Shor's discovery propelled quantum computing into the limelight. In 1994,
he showed that the problem of factoring the product of two prime numbers could
be solved efficiently using a quantum computer [Sho94]. Shor's algorithm not only
generated academic interest, but it also garnered the attention of the public because
of its potential to break encryption schemes, thereby disrupting electronic commerce.
Shor's algorithm enables one to decipher encryption codes based on the difficulty
of prime factorization. The Rivest-Shamir-Adleman (RSA) algorithm is an example
of a popular, public-key crypto-system used for electronic commerce, which can be
deciphered using Shor's algorithm.
Since the conception of Shor's algorithm, researchers have investigated suitable,
physical systems for quantum computers such as Josephson junction superconducting circuits, ion traps, silicon-based semiconductors, and quantum dots [MNAUO2,
20
Kan98, KMWO2, GAPA99] but these physical systems are still in their infancy. Even
so, one technology, nuclear magnetic resonance (NMR), has made moderate advances.
Through radio-frequency (RF) waves, one can manipulate a quantum system that
is physically represented by an ensemble of molecules in a liquid solution. NMR
quantum computing is the forerunner in demonstrating the tools and language necessary for quantum computation. Numerous experiments have been performed, which
demonstrate the Deutsch-Jozsa algorithm, Grover's algorithm, and Shor's algorithm
[SvDH+03a].
1.2
Purpose of my work
NMR quantum computing experiments have demonstrated the validity of quantum algorithms and have demonstrated the complexity of implementation. Current solution
NMR techniques for quantum computation, applied at room temperature and using
standard magnetic fields for polarization, face experimental challenges that make it
unlikely such systems will scale to many quantum bit (qubit) sizes. Because of this,
the usefulness of solution NMR quantum computing has been called into question
[War97].
Nevertheless, for the development of quantum computers, the techniques and instrumentation of NMR provide a powerful language and tool set.
The language
developed helps describe and provide physical understanding for controlling quantum
computers. Underlying the physical control of the qubit is the NMR spectrometer
and its RF electronics.
Modern NMR achieves exquisite control, typically apply-
ing several hundred RF pulses using sophisticated electronics such as digital pulse
programmers, RF amplifiers, phase shifters, mixers, and low-noise amplifiers. The
instrumentation is extremely large and expensive, requiring careful maintenance by
technicians. Although conventional NMR spectrometers are the cutting-edge tool for
quantum computing, they are not optimized for that purpose.
By designing electronics specifically for NMR quantum computing applications,
we can sidestep some problems associated with current systems. NMR quantum com21
puters require complex pulse programmers and power amplifiers to finely control the
generation of RF pulses and pulsed excitation. In our research, we investigate and
provide low-cost, compact pulse programmers and power amplifiers, which meet the
needs for NMR quantum computing. We study two electronic components: the pulse
programmer and the Class E amplifier (CEA) [Sok75]. We discuss the pulse programmer and the CEA in Sections 1.2.1 and 1.2.2 and the targeted design parameters for
each device. In Section 1.2.3, we test the pulse programmer and Class E amplifier by
incorporating both devices in a nuclear quadrupole resonance (NQR) spectrometer
and performing basic NQR experiments.
1.2.1
Pulse programmer
In an NMR quantum computer, a pulse programmer controls the duration, amplitude
and phase of RF waves applied to a qubit. A series of RF pulses, known as a pulse
sequence is generated by the programmer, and quantum logical operations can be
accomplished.
Pulse sequences are transmitted via RF electronics, known as RF
channels. Generally, there exists one RF channel to control one qubit.
NMR quantum computers demand complex, high-speed pulse programmers to
control the qubits.
There are several requirements for NMR quantum computing
applications, including scalability and high timing resolution.
As the number of
qubits increases, the number of RF channels increases. The pulse programmer needs
to control more RF channels, making scalability an important design issue. Another
design issue is the timing resolution of the pulse programmer. For example, suppose
a pulse programmer has a pulse resolution of 50 ns; then it can typically output pulse
durations in multiples of 50 ns. Interestingly, a timing resolution of 50 ns is available
in some commercial NMR spectrometers. High resolution pulses are used to perform
relaxation experiments with special pulse sequences such as the spin echo [Fre97].
For quantum computers, higher resolutions can possibly reduce errors in quantum
operations [Ste03].
In this work, we develop two multiple-channel pulse programmers with accurate
timing resolutions. For the first pulse programmer, we concentrate on the develop-
22
ment of a transparent, user-friendly interface. High timing resolution becomes central
to the design of the second programmer. We attempt to design and implement a pulse
programmer with 10 ns timing resolution.
1.2.2
Class E amplifier
The control of qubits often requires accurate control of RF field strengths applied
on the qubit.
Often, power amplifiers are used in NMR systems to obtain such
control. For accurate control, the power amplifier used in NMR technology poses
several problems and issues, including ringdown time, efficiency, large size, and high
production costs. We address the deficiencies of a typical power amplifier by replacing
it with a CEA topology [Sok75].
The CEA is a switching mode power amplifier that has high power efficiency, high
quality factor (Q), fast ringdown times, and a priori designability. Because of its fast
ringdown time, the signal-to-noise ratio in NMR measurements may be increased. In
this work, the goal was to improve the ringdown time of the power amplifier.
1.2.3
Nuclear quadrupole resonance spectrometer
To test the pulse programmer and the Class E amplifier, we built an NQR spectrometer, demonstrating both devices performing pure NQR spectroscopy experiments.
Pure NQR is very similar to NMR, requiring a similar spectrometer design with minor changes. In pure NQR spectroscopy, researchers exploit the nuclear quadrupole
moment and electric field gradient surrounding the nucleus with pulse sequences of
RF fields to detect a small signal, known as a free induction decay (FID) signal. To
produce pulse sequences, digital and analog electronics in NMR and NQR spectrometers are similar, both requiring a pulse programmer and a power amplifier. The main
difference between NMR and NQR spectrometers is the absence of a large, superconducting magnet in NQR systems. Since no magnet is required, an NQR spectrometer
is cheaper and faster to design and construct than an NMR spectrometer.
23
1.3
Organization of thesis
We start with two introductory chapters describing the basic requirements for NMR
quantum computing: quantum computation theory and NMR theory. In the next
two chapters, we motivate the need to build electronics for NMR quantum computers,
specifically the CEA and the pulse programmer. Next, we present the designs for the
CEA and for the pulse programmer. In the final chapter, we discuss a customized
NQR spectrometer for the express purpose of testing the pulse programmer and CEA.
Chapter 2 starts by laying out the fundamental theory of quantum computation, providing the language and background necessary to understand NMR quantum computation and the progress made in the field. We start with the basic axioms
of quantum mechanics, and illustrate how computation is accomplished based on the
fundamental unit of quantum information: the quantum bit or qubit. Building on this
foundation, we illustrate how the properties of entanglement and unitary evolution
can be used to compute quantum logical operations and how these operations can be
reduced to quantum circuits, which can be used to describe quantum algorithms. We
end by describing Shor's algorithm using quantum circuits.
Next, we delve into the world of NMR quantum computing in Chapter 3. A single
spin-1/2 nucleus is a suitable physical system to represent a qubit. We first describe
how a single qubit can be controlled by RF pulse sequences and how to apply quantum
computation on multiple qubits via the J-coupling among nuclei. We describe the
experimental progress on NMR quantum computing, highlighting Shor's algorithm
in Section 3.4. The NMR implementation of Shor's algorithm demonstrates the requirements for the pulse programmer and the power amplifier in an NMR quantum
computer. By defining the requirements for the pulse programmer and power amplifier, we can design low-cost control instrumentation for NMR quantum computers.
In Chapter 4, we introduce the CEA and present the design and implementation
of a CEA tuned for NQR spectroscopy. The circuit operation and topology is described in detail, emphasizing the trade-offs between high
Q and
power efficiency. As
an example, the design of an amplifier tuned at the resonance frequency of 4.64MHz
24
is illustrated. Finally, we discuss several electrical characteristics of a CEA, including:(1) the output power, (2) efficiency, (3)
Q and
Chapter 5 describes the pulse programmer.
(4) ringing time.
First, we describe the functionali-
ties of a pulse programmer citing an example of one from Varian, Inc. [VNMO1].
Next, we describe two generations of pulse programmers. The first-generation one is
implemented with a Rabbit RCM2200 programmable chip with a customized daughterboard, which I designed.
The second-generation programmer utilizes field pro-
grammable logic arrays (FPGA) to generate pulse sequences.
The framework of
the code is presented for the second generation pulse programmer. For each pulse
programmer, we characterize the behavior by evaluating parameters such as timing
resolution, memory size, minimum and maximum pulse delay, and number of RF
channels.
In order to validate the CEA and the pulse programmer, we develop an NQR
spectrometer as a testbed. In Chapter 6, we describe an implementation of an NQR
spectrometer and demonstrate the CEA and pulse programmer working in this system. We outline the hardware design, starting off by discussing the three main components of the spectrometer: (1) the transmitter, (2) the probe, and (3) the receiver.
The design of each component is discussed by describing the RF methodology for the
basic circuit elements, such as the mixer, the LC resonator, the inductor, and the
amplifier. Some preliminary results are obtained from the hardware, showing basic
signal response from sodium nitride (NaNO 2 ).
The last chapter, Chapter 7, summarizes the work in this thesis and recommends
future work. It addresses the extension of the pulse programmer to superconducting
Josephson phase qubits.
1.4
Contributions
In Chapter 4, the CEA is an extension of the work done by graduate student Yael
Maguire, who designed a 34MHz CEA for NQR spectroscopy of paradichlorobenzene.
Based on his initial designs, I redesigned a CEA tuned at 4.64MHz.
25
I laid out a
printed circuit board (PCB) and verified the functionality in Protel. Zilong Chen
and I "stuffed" the boards and characterized the behavior of the device.
The framework for the pulse programmer described in Chapter 5 was designed with
guidance from Professor Chuang. I created an initial version of the pulse programmer
using a low-cost, programmable logic device using the programming language C.
For the second generation pulse programmer, I wrote the code in very high-speed
integrated circuits (VHSIC) hardware description language (VHDL), and tested and
debugged the system.
The NQR spectrometer described in Chapter 6 was a collaborative effort including
me, Zilong Chen, and Professor Chuang. I laid out the transmission board, including
the pin diode switch, in Protel. Several versions of the matching network and probe
were created before a final circuit was completed. Measurement code was written in
Matlab. Prof. Chuang provided code for Fourier transform and GPIB data acquisition. Zilong Chen and I constructed nuclear instrumentation module (NIM) bins for
the spectrometer based on designs I produced in Omax. I built several versions of
the NQR spectrometer, slowly refining the electronics behind the spectrometer. The
goal is to continuously refine and advance the electronics in the system and integrate
much of the system into several PCBs. I also designed a well-shielded probe. UROP
student Jeff Brock assisted me in procuring the materials necessary for the completion
of the probe.
1.5
Literature
The following is a compilation of texts that are particularly useful to this thesis:
Quantum information theory
Nielson and Chuang's Quantum Computation and Quantum Information is a comprehensive introduction to quantum information theory [NCOO]. It covers a wide range
of topics, from quantum algorithms to error correction, and highlights the numerous
open problems in the field. Another useful book is Gruska's Quantum Computing
[GruOO]. This text merges the ideas in the fields of quantum information Theory and
26
Computer Science, making the book accessible to beginners. John Preskill's lecture
notes for Physics 219/Computer Science 219 course presents delightful discussions
describing quantum computing in an intuitive fashion [Pre98].
Nuclear magnetic resonance
Ernst, Bodenhausen, and Wokaun's Principlesof Nuclear Magnetic Resonance in One
and Two Dimensions is a wonderful and comprehensive resource for the treatment
of NMR, both classically and quantum mechanically [EBW87]. A great companion
to the book is Ray Freeman's Spin Choreography [Fre97], which gives an intuitive
overview of high-resolution NMR techniques and spin dynamics.
Spectrometer instrumentation
Experiment Pulse NMR: a Nuts and Bolts Approach is a great book for experimentalists. Fukushima and Roeder discuss NMR spectroscopy from a practical viewpoint
and various approaches for constructing a spectrometer [FR86].
Petersen's thesis
entitled Pulsed Nuclear Quadrupole Resonance Instrumentation and Study of N14
Spectrum and Relaxation in Sodium Nitrite is an invaluable resource [Pet75], providing tips and techniques that proved to be indispensable to the work covered in this
thesis.
27
28
Chapter 2
Background: Theory of Quantum
Computation
We review the fundamental principles in the theory of quantum computation, illustrating how quantum mechanical operations can be reduced to unitary, logic operations. Section 2.1 discusses the axioms of quantum mechanics. Building on these
concepts, we describe how quantum systems are abstractly represented in Sections 2.3
and 2.4 and introduce the necessary ingredients for performing quantum computations, including the phenomena of entanglement and quantum parallelism, which give
certain quantum algorithms their speed-up over their classical counterparts. Based
upon these properties, we show how quantum operations reduce to quantum gates
and circuits, as discussed in Section 2.5. Using quantum gates, we discuss the following algorithms in Section 2.6: the Deutsch-Jozsa algorithm, Grover's algorithm, and
Shor's algorithm.
2.1
Axioms of quantum mechanics
Quantum theory is a mathematical model of the microscopic, physical world.
To
characterize the model, we need to specify how it will represent states, observables,
measurements, and dynamics in a closed system. We present the basic axioms of
quantum mechanics, which are based on discussions in Preskill's lecture notes
29
[Pre98].
1. States: A state is a complete description of a physical system. In quantum
mechanics, a state is a vector in a Hilbert space over the complex numbers C. Vectors
are denoted in Dirac's notation as ket 1,0). The complex conjugate and transpose of
state IV)) is known as bra (41.
norm 11|0)11 2 = (4{4), where
The state is defined to be complete, such that, the
(..f..) denotes the inner product. The inner product of
1') and 1#), (V510), maps an ordered pair of vectors to a scalar in the set C and is
defined by the following properties:
* Positivity: (0140) > 0 for
4') # 0;
" Linearity: (#| (aI11) + b 102)) = a (#q11) + b (#412); and
* Skew symmetry: (01)
= ($0)* .
2. Observables: An observable is a property of a physical system that can be
measured in principle. In quantum mechanics, an observable is a self-adjoint operator,
i.e., A = At, where A is a linear operator. An operator is a linear map taking vectors
to vectors,
(2.1)
A: 14)->AI).
A self-adjoint operator in Hilbert space has a spectral representation. Another
words, the eigenstates form a complete orthonormal basis. We can express a selfadjoint operation A as
A
(2.2)
anPn,
=
n
where an is an eigenvalue of A and P, is the projector onto the eigenspace of A with
eigenvalue an. For example, if an is nondegenerate, then Pn
=
In )1(, where In) is
the eigenvector with eigenvalue an.
3. Measurement: The measurement process of a quantum system has numerous
interpretations, but the most common version is called the Copenhagen interpretation.
In quantum mechanics, the numerical outcome of a measurement of the observable
A is an eigenvalue of A, an. Measurement of a quantum state IV)) is described by the
30
measurement operator P, which gives the output a, with probability
P(an) = |IPnjV)f1 2 = (OjPnkb).
(2.3)
The measurement operator must satisfy the completeness relation
(2.4)
= I.
EP
n
If the outcome is an, then the normalized quantum state after measurement becomes
Pn|b)
1
((OlPn n)
10)) 1/2-+ .(2.5)
If the measurement is immediately repeated, then according to this rule, the same
outcome is attained again, with probability one. The state of the quantum system
collapses to a post-measurement state. Collapse of the quantum state implies that
the information contained in the coefficients of the eigenstates is instantaneously and
irreversibly destroyed.
Post-measurements cannot reveal information on the other
states.
4. Dynamics or Evolution: Under a closed system, the time-evolution of a
quantum state is described by unitary operators, where an unitary operation U has
the property UtU = I. In the Schr6dinger picture of dynamics, the vector describing
the system moves in time as governed by the Schr6dinger equation
hd
i. dth 1(t)) = HMO(t)),
where H is the Hamiltonian and h is Planck's constant.
(2.6)
Note that in subsequent
equations h is set to 1. For the time-independent Schr6dinger equation, the solution
is
14(t)) = exp (-i7=Lt)I (t = 0))).
31
(2.7)
We denote the time-evolution operator as U(t), where
U(t) = exp (-i'Ht)
(2.8)
|V(t)) = U(t)14'(t = 0)).
(2.9)
and
This completes the four axioms of quantum mechanics. Next, we explore the fundamental unit that makes quantum computation possible: the quantum bit.
2.2
Quantum bits
The indivisible unit of classical information is the bit, which takes on one of two possible values: logical 0, or logical 1. The corresponding unit of quantum information
is known as the "quantum bit" or qubit. In contrast to classical bits, a qubit can
exist in a superposition of states 0 or 1, otherwise denoted by the quantum states:
10) and 11).
The most general normalized state for a single qubit can be expressed
mathematically as
14)
(2.10)
= alO) + b1l),
where a and b are complex numbers that satisfy Ia12 + b12
=
1. The overall phase of
the qubit is physically irrelevant and cannot be revealed by any measurement. We
can also write |0) as
4') = cos
()
10) + exp (iq) sin
(0)
1).
(2.11)
The state of a qubit can be visualized as a vector in a sphere, called the Bloch
sphere, as shown in Figure 2-1. In this representation, the qubit has two degrees of
freedom, 6 and
#.
If the state of the qubit is along the i-axis, then 1') = 10) or 11).
When the vector lies along the 2
-
Q plane,
11).
32
the qubit is in a superposition of
10) and
10>
10>
IV>
10>-i>
-----------IV>
lo+ 1>
) +il1)
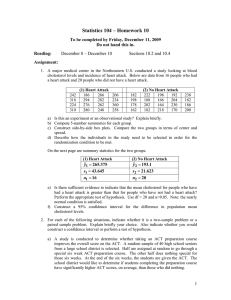
Figure 2-1: (a) Bloch sphere representation of the state 1') of a single qubit. (b) The
position in the Bloch sphere of five important states. The states are not normalized.
2.3
Multiple qubits
If we have two or more qubits, then the picture of the Bloch sphere does not hold
true. The state of two qubits, each in an arbitrary superposition
11) = a10) + bill)
and 1b2 ) = a 2 10) + b2 11), is written as
10)
=
101) 0102)
(2.12)
1')
=
aia 2 |00) + a 1 b2 101) + bia 2 10) + bib 2 |11).
(2.13)
where 0 is the tensor product or Kronecker product symbol. The coefficients of the
terms in the joint superposition state of the two qubits can be viewed independently
of each other. Thus, a more general statement is
1#) = cool00)
where ICool
2
+
coil 2 + cio|
2
+
+ cio10O) + ci11),
+ coi0)
(2.14)
Icnl 2 = 1. For n qubits, a general quantum state 1)
can be described as:
2n-1
I)
cili),
=
(2.15)
i=o
where i is the decimal representation, and ci satisfies the normalization condition
2
n-
1
Icil2
The Hilbert space in an n-qubit system has 2" dimensions, and the state of the
33
quantum system
4')
can be in a superposition of 2" states. Notice that the number
of degrees of freedom for an n-qubit system grows exponentially.
2.4
Computation using quantum systems
Now, we examine the quantum mechanical properties that makes quantum computations possible, such as entanglement, quantum parallelism, and unitary evolutions.
2.4.1
Entanglement
An n-qubit system can be expressed as
4')
(2.16)
=
where |0j) is the quantum state of the i-th qubit and D represents the tensor product
of n states. For example, Equation 2.13 is in the form of Equation 2.16. If the state
of a quantum system can be expressed in the form of Equation 2.16, then the state
is deemed separable.
One of the properties that makes quantum mechanics unique is that there exists
states (in the physical realm) where it is impossible to express a separable state in
such a form. We call such a state non-separable or entangled because the qubits are
correlated. Entanglement is a very important concept in quantum information theory
because it is believed to be a necessary resource to speed up certain algorithms. An
important entangled state is the two-qubit Bell states (also known as EPR pairs):
|3oo)
=
100),+i)
(2.17)
1001)
=
101),+10)
(2.18)
,00)-l)
and
)
111i)|#11)==
101) - 110) .
34
(2.19)
(2.20)
2.20
Note that the measurement of a qubit in the Bell state reveals the state of the second
qubit. This correlation is what Einstein called "spooky action at a distance."
2.4.2
Quantum parallelism and quantum measurement
Suppose we apply a classical reversible gate, g(x), where IV) = cob0)
+ ciii). By
linearity, applying g(x) on the superposition yields:
colo) + ciii)
'-4
colg(0)) + c1|g(1)).
(2.21)
Interestingly, application of the gate g(x) results in the parallel computation of both
states 10) and 11). We begin to see how quantum computation may yield exponential
speed-up for certain algorithms. Consider a two-qubit system in the state
+ cio10)
1') = coo 00) + coi01)
+ cii1l).
(2.22)
The execution of g(x) results in the output state
14)
= coo g(00)) + coilg(Ol)) + ciolg(10)) + c11 Ig(11)),
(2.23)
so that four values have been evaluated in parallel. In general, for every additional
qubit, the number of parallel evaluations doubles. A function that is applied on n
qubits results in the evaluation of 2" possible states:
2"-1
2"-1
1:1X) F- E
x=O
Ig W)
(2.24)
x=O
where x is the integer encoded by a string of n bits.
As the number of qubits grows linearly, the number of evaluations grows exponentially. Thus, a quantum computer can simultaneously perform a number of parallel
operations.
This property was first introduced by David Deutsch in 1995, and was termed
quantum parallelism [Deu85]. As a consequence of quantum parallelism, quantum
35
computers that utilize superposition appeared to have exponentially more power than
classical computers. However, as mentioned in Section 2.1, the measurement process
collapses the superposition of quantum state into a single eigenstate. Measurement
has great implications in the context of quantum parallelism.
Suppose, there exists a 2-qubit system. When a measurement of a superposition
state occurs, the result probabilistically returns either g(OO), g(01), g(10), or g(11). If
n qubits are in a superposition of 2n states, only one of the 2n states will be the result
after the measurement. It appears that the exponential power of quantum computers
is not accessible. However, quantum measurement is not necessarily detrimental to
quantum computation. Despite the necessity of measurement, algorithms exist that
utilize entanglement and quantum parallelism to speed up classical computations.
2.5
Quantum gates and circuits
The mathematics describing quantum computing can be abstracted to a quantum
circuit language, analogous to Boolean, logic gates in electrical engineering.
We
present a description of unitary operations at an intermediate level of abstraction
based on quantum gates analogous to classical gates, such as, the NOT, AND, and
XOR gates. We describe:
" quantum gates that can be implemented on a quantum computer,
* quantum circuit notation for relevant quantum gates, and
* a universal set of implementable quantum gates.
2.5.1
Unitary evolution
Unitary evolution is used to describe the construction of quantum circuit.
One of
the axioms of quantum mechanics (Section 2.1) dictates the dynamics of a quantum
system, i.e., the time-evolution of a quantum state, are described by:
10(t)) = U(t)10(t = 0)),
36
(2.25)
where we denote the time-evolution operator as U(t) as:
U(t) = exp (-iZHt).
(2.26)
H is the Hamiltonian and h is set to 1. Using density operator p, the time-evolution
is given by:
p(t)
=
Epi
(2.27)
piU(t)I i(t = 0))(Oi (t = 0)Ut (t).
Oi(t))(4'i(t)I
The time-evolution of the quantum state can be visualized as rotations of a single
qubit in the Bloch sphere, as shown in Figure 2-1, while multiple qubits can be
visualized as rotations in Hilbert space. We can utilize time-evolution to perform
quantum logic computations.
2.5.2
Single-qubit gates
Unitary evolutions are generated by Hamiltonians, and by controlling these Hamiltonians, specific quantum computations are achieved. A single qubit
Rb)
is described
by col0) + c1 1), which can be expressed in matrix notation as:
(co
1') =
(2.28)
C1
where
14))
is a column vector of two entries, co and ci, and Ico12 + c
Here, 10)
1
=
0)
and 11)
0
=
12
. Note that the matrix representation of (01 is
a row vector; specifically, it is the complex conjugate and transpose of
4').
A single-qubit operation can be describe as a 2x2, unitary matrix acting on
4'initial:
4 )final =
U4)initial.
(2.29)
For example, consider the NOT operation. The NOT function takes 10) to 1) and 11)
37
to |0). The unitary matrix for a NOT operation corresponds to:
UNOT
By applying
UNOT
0
1
1
0
(2.30)
=-
on state IQinitial, we see that:
0
0fnal -
1
cO
Ci
0)
ci
CO
(2.31)
This operation switches the states 10) and 1). We have shown that a single qubit can
be visualized as a rotation in the Bloch sphere (Figure 2-1). More specifically, any
single-qubit rotation takes the form
U = exp (ia)Rj(0),
(2.32)
where R(O) also corresponds to a 0 rotation in the Bloch sphere about the r-axis.
We can define Rf1(6) in the following manner:
) =cos (-)cr
2CO
R (0) = exp (- i '2
where 0 = (o,, u-Y, o-)
i
sin
-
(nru + nYo- + nzo-),
20
(2.33)
-y , and oz denote the Pauli matrices:
and o-,
0
-
1
1 0
,
=-
(
1
0
0
( -iJ
,o-,
7
(2.34)
and a- denotes identity matrix: The Pauli matrices give rise to three useful classes
of unitary matrices, the rotation operators about the
Rx(0)
Ry(6)
exp
exp (-i
2
2
Gi-?
RZ(6)- exp (-i 2)
2
= cos
)
(-)
2()
20
o-r
-
38
y-,
i sin
c-i -isin
-
(2
-,
i
and i-axes:
-
c-2,
(2.36)
-
sin -
(2.35)
o-.
2 UZ
(2.37)
A rotation about the i-axis of 90' corresponds to an unitary matrix R,(90'), while
a rotation R,(180') is a NOT operation with an overall global phase factor.
Another interesting single-qubit gate is the HADAMARD gate, given as the matrix
1(1
H=
vl2
1N
1
.
(2.38)
-1)'
The HADAMARD gate transforms the basis state, 10) or 11), into equal an equal su-
perposition of states 10) and 11) with different phases:
)
(2.39)
10)- 1)
(2.40)
0)
I1)
*
This gate can be implemented by -- and
Q-rotations:
H = R'(1800 )R9(900 ) = Rv(90')Rs(180 0 ).
Single quantum operations are represented using circuit diagrams.
(2.41)
A unitary
operation, U, is shown in Figure 2-2(a). The NOT gate is represented by the symbol
D, as shown in Figure 2-2(b).
39
U
(b)
(a)
Figure 2-2: Quantum circuit representation of (a) an arbitrary single-qubit rotation
U, and (b) the NOT gate.
2.5.3
Two-qubit gates
The "classical" two-qubit gate is the controlled-NOT, or CNOT, gate. The CNOTij
gate has two qubit inputs, i and
j.
Qubit
j
is called the target, and qubit i is known
as the control qubit. If qubit i is in the state 11), then the target qubit is flipped;
otherwise the target qubit remains the same. The truth table is shown in Figure 2-3.
Input(ij)
00
01
10
11
Output (i)
00
01
11
10
Input(ij)
00
01
10
11
(a)
Output(ij)
00
1 1
10
0 1
(b)
Figure 2-3: Truth tables for (a) the CNOT 12 operation, and (b) the CNOT 21 operation.
For a two-qubit state 1) = coo100)+coi 01) +c 1o110) +cjI| 11), the unitary matrices
for the CNOT gates are:
0 1 0 0
1 0 0 0
0 1 0 0
UCNOT
12 =
and
UCNOT 2 1
1 0 0 0
=
0 0 0 1
0 0 1 0
0 0 1 0
0 0 0
(2.42)
1
An extension of the CNOT gate is the controlled-U gate, where a single-qubit operation
U is performed on the target qubit if and only if the control qubit is 1). There is also
40
the zero-controlled-U gate, in which U is executed if and only if the control qubit is
10).
Finally, another two-qubit operation is the SWAP gate:
1
0 0 0
Uswap =
(2.43)
,
0 1
0
0 0
0 0
1)
which switches the state of the two qubits. An alternate to express the SWAP operation
is by a series of CNOT operations:
SWAP
12
= CNOT 12 CNOT 21 CNOT
(2.44)
12 .
The quantum circuit representations of all two-qubit operations presented in this
section are shown in Figure 2-4.
U
(a)
(b)
(c)
(d)
Figure 2-4: Quantum circuit representation of (a) a controlled-NOT gate, (b) a zerocontrolled-NOT, (c) a SWAP gate, and (d) a controlled-U gate. The e symbol denotes
the control qubit - the controlled operation is only executed if the qubit is in the
11) state. The o symbol denotes the zero-controlled qubit, i.e., the operation is only
executed if the control qubit is in the state 10).
One can create multiple-qubit operations, i.e., three or more qubits, using onequbit and two-qubit gates. For example, the TOFFOLI gate, as shown in Figure 2-5,
is composed of CNOT gates and controlled-V, where:
v=
2
41
(2.45)
The TOFFOLI operation flips the target qubit (the third qubit) if and only if the
two control qubits are 11); hence, it is also referred to as a doubly-controlled NOT or
CCNOT
gate.
V'
V
V
Figure 2-5: Quantum circuit representation of a TOFFOLI gate and its decomposition
into two-qubit gates.
The quantum circuits in this section correspond to logical operations similar to
classical Boolean circuits. In classical computation, a small set of gates (e.g. AND,
OR, NOT) can be used to compute an arbitrary classical function. Such a set is uni-
versal for classical computation. Similarly, there exists a set of quantum gates that is
universal for quantum computation, i.e., any unitary operation may be approximated
to arbitrary accuracy by a set of quantum gates. For example, an arbitrary singlequbit gate and CNOT gate form a set of universal quantum gates. With a universal
set of quantum gates, quantum algorithms can be implemented.
2.6
Quantum algorithms
This section discusses examples of some milestone quantum algorithms developed in
the field of quantum information theory and illustrates Shor's algorithm using quantum circuits. We also describe the Deutsch-Jozsa algorithm and Grover's algorithm.
These three algorithms have been proven to be faster in computational steps than
their known classical counterparts, requiring less resources, such as quantum memory
(e.g. spin of an electron) or quantum channels (e.g. fiber optic line). We briefly give
an overview of the Deutsch-Jozsa algorithm and Grover's algorithm, followed by a
quantum circuit description of Shor's algorithm.
42
In 1992, Deutsch solved Deutsch's problem, showing an exponential speed-up of
the quantum solution over the classical one. Deutsch's problem is stated as follows:
Suppose Bob has a black box, or oracle, f(x) with n input bits and one output bit.
Alice selects an n-bit number ranging from 0 to 2" - 1. She sends the number to Bob,
and he calculates the number using the oracle. The output of the oracle is promisedto
be either constant for all possible input values or balanced, i.e., equal to 1 for exactly
half of all possible input values, and 0 for the other half. Alice's goal is to determine
with certainty whether Bob's oracle is constant or balanced.
Classically, Alice needs to send Bob 2/2+1 different inputs to determine whether
Bob's oracle is constant or balanced. Deutsch and Jozsa realized that a quantum computer can solve the problem exponentially faster than the classical approach. In the
quantum algorithm, the initial input to the oracle is the equal superposition of all
possible values from 0 to 2' - 1. During the computation the wrong answers destructively interfere while the correct answer interferes constructively. In this approach,
only one query of the oracle is needed, highlighting the potential advantage of a
quantum computer. Unfortunately, there are no practical applications known to take
advantage of Deutsch's algorithm. It is only a clear demonstration of how a quantum
computer can solve certain problems with an exponential speed-up over a classical
computer.
In contrast to the Deutsch-Jozsa algorithm, Grover's algorithm has practical applications. Grover showed that a quantum computer can search an unsorted database
with polynomial speed-up over the best possible classical, unstructured search algorithm. An example of an unstructured search is finding the name corresponding with
the phone number in a phone book with n alphabetically listed names. On average,
one would look up (n(n + 1)/2 - 1) /n ~ n/2 different numbers before finding the
name. With Grover's algorithm, one can find the name in V/n attempts.
As in the Deutsch-Jozsa algorithm, there is the notion of a promise problem in
Grover's algorithm. In this case, an oracle returns either f(x) = 0, for all values of x
except for the unique entry x = x 0 , or f(x) = 1, where x = xo. The input is put into
an equal superposition of all possible values, using the HADAMARD transformation,
43
and sent through a quantum circuit, which performs a number of Grover iterations
and eventually returns xO. Intuitively, Grover's iteration constructively builds up the
amplitude of Ixo) while reducing the amplitudes of the remaining terms. Note that the
amplitude of Ixo) peaks to a maximum value, and afterwards, the amplitude oscillates
sinusoidally. The measurement of the output will be xO with high probability.
Shor's algorithm
2.6.1
Shortly before Grover's algorithm was discovered, another algorithm had made a
large impact in the field of quantum computing. In 1997, Shor made a tremendous
discovery in the problem of factorization and the computation of discrete logarithms
[Sho97]. He showed an exponential speed-up over the best known classical algorithms
and provided a method to efficiently decipher public-key crypto-systems that rely on
the difficulty of factoring, such as the RSA encryption algorithm. The factorization
algorithm quickly became famous and was dubbed as Shor's algorithm. We describe
Shor's algorithm and highlight the major steps necessary for obtaining the solution,
including the order-finding problem.
We outline the solution to the factorization problem. Note that much discussion
about the mathematics behind this algorithm is left out of the discussion. The solution
to factorization is mainly due to results from number theory.
Suppose L is the product of two prime numbers. Shor's algorithm states:
" If L is even, then return the factor 2, else
" If L = ab for a > 1, b > 2, and a, b E Z, then the factors can be efficiently,
probabilistically determined, and the factors are returned.
" If L fits neither of the first two conditions, randomly choose x such that 1 <
x < (L - 1). If gcd(x, L)> 1, then return the factor gcd(x, L).
* If the first three conditions do not return a factor, then use the order finding
subroutine to find the order r of x Modulo L.
44
* If r is even and x 2
-1(mod L), then the factors of L are computed by the
ged(xl + 1,L) and and the gcd(x" - 1,L). Finally, test to see if these factors
are non-trivial. If so, return the factors; otherwise, the algorithm fails.
The key step to the exponential speed-up over classical algorithms is the quantum
order-finding algorithm, which determines the order, r, of x(mod L).
function is represented by the function
f(j)
=
Suppose a
xi (mod L). If L = 15 and x = 4, then
the order r is 2. We explicitly calculate the order for L = 15 in Table 2.6.1.
j f(j)
0
1
2
3
4
5
1
4
1
4
1
4
Table 2.1: The solution to order-finding problem is explicitly calculate for L = 15.
The order of is r = 2 for x = 4.
The quantum circuit for the order-finding algorithm is shown in Figure 2-6. The
unitary operation U performs the transformation
Li) 1k)
-+
j) |ximod
L). The size of
the first register is approximated as t = 2 log(L), and the second register is approximated as log(L). The operation, controlled-Us, is efficiently implemented using the
modular exponentiation procedure [NCOO]. The circuit operates as follows:
" Initialize the quantum state to 10) 1).
* Apply the HADAMARD operation to create a superposition of states on the first
register, changing the quantum state to
2-1)1).
-E
* Apply controlled-Uj operations to create
1 E~-I I)lxj(modL)) ~
1 ENt--1
r_ exp (27ris/r) 1j) Ius),
where s/r is an n-bit approximation of s/r and us) =
exp (-2isk xkmod L)
Note that if we wish to approximate s/r to an accuracy of n-bits with probability of success at least 1 - e, we choose t = n + [log (2 + 1/2c)]
45
* By applying the quantum Fourier transform to the first register, the quantum
state becomes L 1
I s/r)Iu,).
" Measurement of the first register yields s/r.
t
)ot
H t
lif
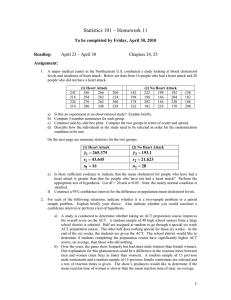
Figure 2-6: The quantum circuit which performs the order-finding algorithm in Shor's
algorithm.
The continued fractions algorithm is applied to the result of the quantum orderfinding circuit to reveal r [NCOO]. Finally, the factors of L are determined by calcu-
lating gcd(x' + 1,L) and gcd(xl - 1,L).
2.7
Summary
Based on the axioms of quantum mechanics, we have established methods to perform
quantum computations. Simple logical operations are accomplished on a single qubit,
which can be mapped to the Bloch sphere.
However, the Bloch sphere does not
apply for quantum operations on multiple qubits.
Operations on multiple qubits
can correspond to a parallel number of computations; quantum systems containing
n qubits can be represented by 2n complex variables.
This concept of quantum
parallelism can be used along with entanglement to possibly speed up certain quantum
algorithms, which can efficiently solve certain mathematically hard problems.
Quantum algorithms can be described by quantum circuits that correspond to
unitary evolutions. As quantum circuits increase in size, the complexity of the circuit
46
grows, raising the probability of failure in a quantum circuit; thus, implementing
complex RF pulse sequences is a challenging task, requiring precise control of the RF
pulse to accomplish a quantum logical operation.
In this chapter, we have focused on the ideal theoretical scenario. However, realistically generating precise pulsed excitation to control the qubit system requires
one to understand the physics of the system, representing the quantum computer,
and the requirements for control. In the next chapter, we describe nuclear magnetic
resonance (NMR) quantum computers and identify the methods and tools underlying
the control of qubits.
47
48
Chapter 3
Nuclear Magnetic Resonance
Quantum Computing
The language of quantum computation and quantum circuits can be translated to
a sequence of RF pulses, which are generated via analog and digital circuits, such
as the pulse programmer and the power amplifier, in a nuclear magnetic resonance
(NMR) spectrometer. We begin, in Section 3.1, by describing the history of NMR
spectroscopy. Then, Section 3.2 discusses how quantum circuits and operations are
accomplished using NMR techniques and RF pulses. Underlying pulsed NMR techniques, there is the NMR instrumentation, which consists of numerous components
including the magnet, probe, receiver, workstation, and receiver, as described in Section 3.3. Two major components are of interest: the power amplifier and the pulse
programmer.
Understanding the limitations of the NMR system for quantum computing helps
us identify the problems associated with it. The experimental demonstration of Shor's
algorithm shows the need for pulse programmers capable of executing complex, fast
RF pulse sequences and low-noise, power amplifiers.
In Sections 3.4 and 3.5, we
discuss the instrumentational issues with pulse programmers and power amplifiers
used for NMR quantum computers, highlighting the challenges of generating complex
pulses and decreasing ringdown time of power amplifier, which can increase the signalto-noise ratio (SNR) during readout.
49
3.1
NMR historical background
The purpose of spectroscopy is the characterization of a molecular system by a "spectrum." In most cases, the spectrum presents resonance properties of a physical system
and can thus provide insight into its quantum mechanical structure. One example
of a spectroscopy is nuclear magnetic resonance (NMR) spectroscopy. The first experiments and discoveries about NMR were executed by Bloch and Purcell in 1945
[BHP46, PTP46].
They discovered that it is possible to transfer energy from RF
waves to certain nuclei, whose resonance is defined by a uniform, strong magnetic
field applied along a fixed axis. Furthermore, they were able to excite the state of the
system, populating higher energy levels. When the system relaxed to its equilibrium
state, a small signal was induced, which was detected using using a coil.
Over the last two decades, NMR spectroscopy has gone through a renaissance.
The advancement of modern digital electronics have made it possible to apply novel
techniques in NMR such as Fourier analysis, which in turn, made high-resolution
NMR possible. The advancement in NMR spectroscopy has made it one of the most
powerful analytical tools in modern science with applications including solid state
physics, chemistry, molecular biology, and medicine. Interestingly, NMR spectroscopy
also has connections to quantum computation.
In 1997, Gershenfeld and Chuang [GC97a], and independently Cory, Havel, and
Fahmy [CFH97], proposed to use bulk spin NMR for experimental quantum computation. They showed how to implement quantum logic operations using liquid state
NMR techniques. In 1998, the first set of experiments that demonstrate a quantum
algorithm using NMR were completed by Chuang [CVZ+98] and independently by
Jones [JM98]. From 1998 to 2003, feverish work on NMR quantum computing led to
the increase from two-qubit systems to seven-qubit systems and to the implementation of the Deutsch-Jozsa algorithm, Grover's algorithm, and Shor's algorithm, the
cornerstone algorithms of quantum scomputing.
50
3.2
NMR quantum computing
NMR phenomenon provides a physical medium for the application of quantum information theory. In fact, DiVincenzo's criteria [DiVOO] provides a connection between
quantum information theory and physical systems. The criteria states that any physical system, considered as a candidate for quantum computation, should satisfy the
following: (1) one needs well-defined two-state quantum systems, (2) one should be
able to prepare the initial quantum state with sufficient accuracy, (3) a long phase
coherence time is needed for coherent operations, (4) control over the qubits' Hamiltonian is required to perform unitary operations, and (5) quantum measurement is
necessary for read out.
One system that meets these requirements is a spin-1/2 nuclear system. A nuclear
spin-1/2 system is a good candidate for a quantum computer.
A nuclear spin-1/2
system has a 2-level system, which naturally represents a qubit, as shown in Section
3.2.1. These spins have coherence times long enough to perform quantum operations
[GC97b]. Quantum logic circuits can be translated to RF pulses, which can be used
to carry out quantum operations with modern NMR spectrometers. Multiple-qubit
systems can be engineered with special designer molecules, utilizing inter-molecular
coupling and multiple-qubit operations can be carried out, as described in Section
3.2.2. In NMR, single spin detection is extremely difficult to achieve. Hence, quantum
operations are applied on a bulk sample of identical and independent spin systems.
Each independent system can be thought as an individual quantum computer which
runs its quantum operations in parallel with other systems.
3.2.1
NMR quantum computer: the physical system
In NMR quantum computing, the physical representation of each qubit is a different
nuclear spin, with I = 1/2. The Hamiltonian, of a spin-1/2 particle in a magnetic
51
field of strength B along the 2-axis is
hwo
Ho = -hyBI, = -hwoI
=
0
2
where y is the gyromagnetic ratio of the nucleus,
)
,
(2
'-
(3.1)
is the Larmor frequency, and
WO =yB. The eigenvalues of the Hamiltonian are
1
-hwo,
2
1
-hwo,
2
=
e
i
=
(3.2)
and
(3.3)
where each eigenvalue of the Hamiltonian corresponds to an energy level depending
on B.
A molecule of n distinguishable uncoupled spin-1/2 nuclei constitutes an n-qubit
quantum computer. The Hamiltonian for Zeeman splitting is given as:
'Ho = -
where i is the spin index, and
h
(3.4)
wiIl,
! is the Larmor frequency associated with spin i.
The Larmor frequencies for each spin are different depending on the atom's -y; thus,
different nuclei have distinguishable frequencies for a heteronuclear system.
Nuclear spins in a molecule have two distinct interaction mechanisms: (1) dipolar coupling (also known as magnetic dipole-dipole interaction) and (2) J-coupling or
scalar coupling. In general, in an isotropic liquid, molecular dipolar coupling is averaged away due to rapid tumbling of molecules. The second interaction, J-coupling,
is the dominant mechanism utilized for coupling qubits.
For a heteronuclear sys-
tem, the resulting coupling is mediated by shared electrons in the chemical bonds
between atoms in the molecule.
The coupling strength J depends on the element.
The first-order approximation is described by the Hamiltonian:
27rJij I® 9 Iz ,
Hj = h
i<j
52
(3.5)
where Jij is the coupling between spins i and
j.
The complete Hamiltonian, neglecting
higher order terms, is approximated as:
Htot = Hz + Hi
The additional J-coupling terms introduce shifts of ±
(3.6)
in the energy levels, which
are independent of the magnetic field. In this case, we have assume |wi
-W21
>> I
J.
For example, two qubits whose interactions are mediated through J-coupling give rise
to 4 distinct energy levels.
3.2.2
RF pulses perform quantum operations
Quantum circuits are implemented using RF pulses in NMR, which can accomplish
both single- and multiple-qubit operations.
The energy from electromagnetic RF
waves can be selectivity transferred to certain spins in a molecule, thereby producing
quantum operations depending on the field strength and time of RF wave. A single, unique pulsed RF of certain frequency corresponds to single gate operations, for
example the NOT gate. With multiple RF frequencies and a coupled spin-1/2 system, we can extend beyond single gates operations and perform multiple-qubit logic
operations like the CNOT gate.
Single qubit rotations
Recall from Chapter 2, a spin-1/2 particle can be classically viewed as a magnetization vector in 3-D space. A magnetic field applied along the 2-axis initializes the
magnetic vector, aligning it in the same direction as the field vector. The magnetic
vector precesses about the 2-axis, which is analogous to a spinning top. By applying
RF pulses in the
y- axis.
- plane, one can rotate the magnetic vector about the 1- and/or
This classical picture of spin can be mapped onto the Bloch sphere, where
RF pulses corresponds to rotations of the magnetic vector in the Bloch sphere.
By applying a polarized RF field in the :-
plane on a selected spin i at wi, we can
perform single qubit operations. An RF pulse along the ii-axis induces a 0 rotation in
the Bloch sphere as expressed by the rotation operator exp (-ig-). In the rotating
53
frame, the application of an RF pulse at the resonance frequency yields a rotation
about the applied axis at an angle:
0 = h-yj/t,,
(3.7)
where tPW is the duration of an RF field and 3 is the RF field strength. An RF pulse
about the J axis for an angle of 900 corresponds to the rotation operator Rx(9
0
). By
shifting the phase of the RF pulse by 90', the rotation operator is Ry(9 0 ').
Two-qubit rotations
Logic gates can be imple-
Two-qubit operations are mediated via J-coupling.
mented by allowing the system to evolve naturally. We assume that coupling is
between spins i and
j
and that individual couplings can be selectively turned on.
Using equation 3.5, the evolution under the coupling Hamiltonian for a duration t is:
Uj(t)
=exp (-iJijtl 0 Ij)
exp (-irJit)
0
0
0
0
exp(i'it)
0
0
(3.8)
2__.
0
0
exp(it)
0
0
0
0
exp (
2)
An example of a two-qubit operation is Z2ZjUj(t = 1/(2Jij))), which yields
0 0
0
0 1 0
0
0 0
1
0
0 0 0
-1
1
exp (iir/4)
The operation is a controlled-z acting on spins i and j.
CNOTij,
(
(3.9)
.
Another example is the
which can be implemented by the following pulse sequence:
ZjYj Uj(1/(2Jij))XjZj.
54
Single- and multiple-qubit gates are implemented by a sequence of precisely controlled RF pulses acting on a specially designed molecule. To accomplish single-qubit
operations, RF fields are applied at the Larmor frequency of interest, Wi for a finite
duration. For multiple-qubit systems, J-coupling interactions among nuclei give rise
to unique energy splitting that are accessible to RF pulses. However, as the number
of qubits grow, it becomes difficult to address with traditional RF pulses because the
splittings in the spectrum start to spread. Undesired transitions outside of the qubit
manifold are induced with off-resonance RF pulses, which induce errors in the quantum circuit, such as bit flips. Shaped pulses are used to reduce errors by increasing
the selectivity between energy levels due to a narrow spectral density [Ste03].
Pulse shaping is generated by a pulse programmer, which often controls the amplitude and phase of a pulse. Since control of qubits via RF pulses is vital, pulse
programmers are an integral part of the NMR spectrometer.
3.3
NMR spectrometer
Pulsed NMR techniques, such as pulse shaping, are achieved using a modern NMR
spectrometers, as shown in Figure 3-1. Typically, a sample is placed in the center of a
large superconducting magnet and under the influence of a large static magnetic field
B, causing Zeeman splitting. RF pulse sequences are generated by the spectrometer and applied to the sample through RF coils.
This section discusses the main
components of a NMR spectrometer, the magnet, probe, receiver, workstation, and
transmitter, and cites the Varian NMR spectrometer as an example [VNMO1].
The
Varian spectrometer is a commercial spectrometer used for NMR spectroscopy and
NMR quantum computing experiments. The version used in our lab is customized
for quantum computing, illustrating the need for specialized components. The pulse
programmer and the power amplifier are two important components because they
contribute to the control of a quantum operation.
Magnet and probe
In the Varian spectrometer, the magnet and the probe physically compose the greater
55
.9
A A £
Rcoil
P
a P
A
~
Figure 3-1: Overview schematic of an NMR spectrometer [FR86]
bulk of the system. A large well-shielded housing encases both the magnet and the
probe, with a large, magnetic field generated by a superconducting magnet.
The
magnet is a solenoid immersed in a bath of liquid helium, which cools it to a temperature of 4.2K, generating a field strength of 11.7 Tesla at 100A. Figure 3-2 shows
a picture of an NMR magnet. The probe consists of RF coils, tuning and matching
circuits, a temperature control system, and gradient coils. The probe is designed to
accommodate the transmission of RF pulses to the sample and the transmission of
the FID signal to the receiver (see Section 3.5 for more details). The FID signal is the
signal induced from the sample by the RF pulse (see Appendix A for more details).
Receiver
The receiver detects the FID signal from the probe, by amplifying a signal on the
order of [p-Volts. The FID signal travels down a quarter-wavelength cable, which acts
as an impedance transformer, to a preamplifier. The preamplifier is a low-noise amplifier with an overall noise figure of 1.7dB for high bandwidth operation preamplifier
and 1.6dB for low bandwidth operation. The total gain is 35dB.
Next, the FID signal is mixed by an intermediate frequency (IF) of 20MHz. The
resulting mixed signal is mixed down to audio frequencies (kHz) and sent through
56
Figure 3-2: Picture of an Oxford Instruments 500MHz narrow-bore NMR magnet
audio filters. Furthermore, the signals are mixed such that the
£-
and
Q- magneti-
zations from the FID signal are measured. This is known as quadrature detection,
and the details are discussed in Section 6.4. For the Varian NMR spectrometer, the
maximum sampling rate is 1MHz with a buffer holding up to 524288 points. After
the signals are captured, data are uploaded to the workstation.
Workstation
Central to the operation of an NMR spectrometer is the workstation, which is
composed of a Sun Ultra 10 computer with proprietary software (VNMR) from Varian. The user can design different experiments with the software and run multiple
automated experiments. Pulse sequences are written in C and compiled into an byte
code. Pulse sequences are generated by the pulse programmer, and the resultant
signals sent to the workstation for further analysis.
3.3.1
Transmitter: pulse programmer and power amplifier
The control of the qubit relies heavily on two components, the pulse programmer
and power amplifier, which together make up a large part of the transmitter. The
customized Varian NMR is equipped with four RF channels. Each RF signal is gener57
ated from a temperature-controlled master oscillator, which can generate a continuous
lVrms signal from 1 to 620MHz via PTS synthesizer.
Figure 3-3: The NMR cabinet houses the transmitter and control electronics for the
Varian spectrometer.
The pulse programmer "gates" the continuous RF wave using transistor-transistor
logic (TTL) pulses. In addition, the digital output from the pulse programmer can
be used to control analog circuits that determine both the amplitude and phase of
the RF pulse; thus, pulse shaping can be accomplished. The NMR spectrometer has
a minimum pulse length of 100 ns and a timing resolution of 25 ns. The phase can be
set in steps of 0.5' This is accomplished in two steps, either coarse or fine shifters. The
coarse shifter sets the phase in steps of 900, while a fine shifter achieves 0.5' resolution
by mixing two quadratures with adjustable amplitudes. Each transmitter is equipped
with a linear attenuator, which controls the amplitude of the pulse. There are a total
of 4096 discrete steps in the amplitude. After the RF-gated pulse is generated, the
signal is routed to another set of attenuators, which attenuate the signal over a range
of 79dB in steps of 1dB. Overall the coarse attenuators have a greater dynamic range
than the linear attenuators in the transmission boards. Figure 3-3 shows the housing
for the transmitter boards.
58
As seen in Equation 3.7, the amplitude of the RF pulse is vital to controlling the
angular rotation of the vector in the Bloch sphere. The pulse programmer provides
minimal amplification, whereas linear power amplifiers provide a large gain. There
are two amplifier units, consisting of a low frequency amplifier (6-200MHz) and a
high frequency amplifier (200-500MHz).
The maximum power is 100W in pulsed
mode, providing 50dB gain. In continuous mode, the maximum power is 30W at low
frequencies, and 15W at high frequencies. The amplifiers are designed to accept input
rise and fall times as short as 200 ns.
3.4
NMR experiments
The pulse programmer's and the power amplifier's importance have been demonstrated in recent NMR quantum computing experiments. These experiments have
shown the need for complex pulse sequences, requiring precise control of the pulse
durations and amplitudes in order to minimize errors in quantum operations. The
first experiments demonstrating the feasibility of quantum computers were two-qubit
implementations of Grover's algorithm [CGK98, JMH98]. Once NMR proved feasible
for the implementation of quantum algorithms, the next goal was to confirm other
quantum algorithms. Molecules were developed for three-qubit and five-qubit quantum systems, and the three-qubit Deutsch-Jozsa algorithm was demonstrated using
various quantum circuits [LBF98].
As more algorithms were demonstrated, the complexity of these experiments became clearer.
The experimental demonstration of the order-finding problem and
Shor's factoring algorithm [VSB+01, VSB+00] exhibited complex, shaped-pulses necessary to minimize undesirable transitions, which may lead to errors in quantum
operations.
3.4.1
Experimental realization of Shor's algorithm
The demonstration of Shor's algorithm illustrates the requirements the pulse programmer and the power amplifier for an NMR quantum computer. The smallest,
59
composite prime number that can be factored using Shor's algorithm is L = 15. A
quantum circuit two registers, where the first register is at least n = 2m = 8 and the
size of the second register is m = [log215] = 4. To factor 15, one can use quantum
circuit shown in Figure 3-4. The outline of this quantum circuit differs from the quan-
.H
X.,~
x4
6
H
0>
H
M
11
H
H
1>
lp __
P
VV
a
a2
Inverse
E
QFT
A
_S.
a4
a'
a
a
a"
a
Figure 3-4: Quantum circuit illustrating the order-finding algorithm in Shor's algorithm.
tum circuit presented in section 2.6, but the concept remains the same. The quantum
circuit implements the order-finding algorithm. The controlled-U operations is given
by the classical function:
f (X)
=
(3.10)
x2k (modL).
We can implement the order-finding algorithm using modular exponentiation and the
quantum Fourier transform. Additionally we observe if Ixk)
multiply by the first register a2k
=
1. If
IXk)
=
=
11) (for k > 2), we
0), then we do nothing. Thus, the
circuit can be simplified to seven-qubits, because only a and a2 are implemented and
at most two qubits of the first register act non-trivially during execution [VSB+00].
3.4.2
The experiment and the importance of the pulse programmer
The experimental demonstration of Shor's algorithm shows the need for complex pulse
sequences to achieve quantum computations. These computations are achieved using
the molecule hexafluoro butadiene, as shown in Figure 3-5. Five fluorine atoms and
60
two carbon atoms establish a seven-qubit quantum system. To selectively control the
quantum operations, individual qubits must be selectivity addressed by RF pulses
corresponding to the qubit's resonance frequency.
3
FJ
-N
_F
c00
4
C5 H5
CO
Figure 3-5: The molecule hexafluoro butadiene is used as the NMR quantum computer
in Shor's algorithm.
Shaped pulses are applied on the qubits in this experiment to effectively address
individual qubits. These pulses start at a low magnetic field /, gradually increase in
field strength to a maximum peak, and finally taper off to zero field. Shaped pulses
can be characterized by the following properties:
* selectivity: product of excitation bandwidth and pulse length (lower is more
selective)
* power: the peak power required for a given pulse length (low is less demanding)
" robustness: whether the spin response is very sensitive to experimental imperfections, such as RF field inhomogeneities and calibration errors
In this experiment, Gaussian 900 and Hermite 1800 shaped pulses are applied on
the qubits. Both Gaussian 90' and Hermite 180' pulses have excellent selectivity and
moderate power requirements when compared to traditional hard pulses. Figure 3-6
shows the RF pulse sequence applied on each qubit. A single experimental run consists
of approximately 300 Hermite 180' shaped pulses and 30 Gaussian 90' shaped pulses.
In the end, the total time for one experimental run is 720ms - 200 ms for initialization,
400ms for modular exponentiation, and 120ms for the quantum Fourier transform.
61
1
: iIJI& ILilunIiIll~ir1111Li
IUikU
I
2
3
:i_
4
:
5
IJ. 1 ULiLUIILLLRLiJJJ
14k]LLI
l
I I
II
:1
l
l
I
i
,
l
i
I
I
I
I
I
I
6
7
(0) 17-(1)(2()
Figure 3-6: NMR pulse sequence for implementing Shor's algorithm to factor N=15
with seven qubits. The tall lines represent 90' pulses acting on one of the seven
qubits (horizontal lines) about the positive : (no cross), negative i (lower cross) and
positive Q (top cross) axis.
As we can see, the experimental implementation of Shor's algorithm is a great
technical feat that requires complex, shaped pulses to control the qubits. The shaped
pulses are generated by a sophisticated pulse programmer, which precisely controls
the amplitude and duration of a pulse. The Varian pulse programmer, a commercial
system, creates shaped pulses by constantly modulating the RF signal in discrete
time slices. It is capable of outputting 2096 time slices with a minimum time of 0.2ps
per slice.
The experimental implantation of Shor's algorithm demonstrated the requirements
for a pulse programmer. The pulse programmer is necessary for control of the amplitude, phase, and duration of a RF pulse, requiring sub-pus pulse widths. Furthermore,
it needs to be scalable, flexible, and easy to use, or transparent. As the number of
qubits increases, the pulse programmer must be designed to scale by adding more
62
RF channels to address the qubits. The complexity of synchronization among pulse
programmers increases with the number of channels. A properly designed pulse programmer for quantum computing must be flexible so that adding another channel is
simple and transparent to the user.
Instrumentation issue for quantum computers
3.5
We have shown that precise control of phase and amplitude is required for performing quantum operations by illustrating the experimental implementation of Shor's
algorithm. The experiment highlights the requirements for a pulse programmer but
also identifies another problem in NMR quantum computing. The power amplifier's
ringdown time effects the readout of a qubit's value.
Section 3.5.1 discusses the
contributing factors to the SNR, and Section 3.5.2 discusses the effect of a power
amplifier's recovery time on the SNR.
3.5.1
NMR readout: measurement
We have shown the qubits of a molecule are distinguishable by their Larmor frequencies. In the measurement process, when we apply an on-resonance RF pulse, the
spectrum of the FID is characterized by a Lorentzian line. The result allows one to
determine the state of a qubit after quantum operations are conducted. However,
there are some considerations in the measurement process. In particular, the SNR
must be considered.
Signal-to-noise ratio
The maximum NMR signal, V, is measured by an RF pick coil after an NMR FID
signal is induced. V depends on the following:
* the number of molecules in the sample, which is proportional to the volume V
and the concentration nc,
" the filling factor, M, which is the fraction of the coil volume occupied by the
sample,
63
* the equilibrium polarization, co, which is proportional to y, B, and 1/T,
" the frequency, wo, is proportional to y and B,
" the geometry of the coil, known as the factor K,
" the number of equivalent sites, ne, in the molecule for spin, i.e., there are three
1H
in CH3Cl,
" the quality factor of the coil, Q, and
" the multiplicity of the NMR spectrum, m, which is inversely proportional.
The noise in NMR measurements is dominated by the thermal noise in the coil. The
root mean square (rms) noise amplitude is proportional to the square root of
" the absolute temperature of the coil Tc,
" the shunt resistance of the tuned circuit,
R = QLwo,
" and the bandwidth of the signal, Af.
The SNR can be expressed as [Ste03]:
S- 0c ncVnhe'y~/2
3/2Qi/2KT
Q1
,n-B
K2
N
MT (Tc Lof)(1/2)
(3.11)
The SNR is dependent on these parameters, but in practice, many of these parameters are interdependent.
Furthermore, the process of signal acquisition lowers
the overall, ideal SNR.
3.5.2
Transient data acquisition
After an RF pulse of duration t, an FID signal is induced from the bulk spin sample.
In order to measure the signal for data processing, such as Fourier analysis, the FID
is digitally sampled. Usually, the sampling rates are tens of kHz up to tens of MHz
such that Nyquist's limit is satisfied. Additionally, a low pass filter is used to limit
the bandwidth so that aliasing and folding do not pose a problem.
64
An external
trigger is used to enable digitization of the signal, which is useful for two reasons.
First, magnetization at the correct points in multiple experiments can be sampled for
signal averaging. Second, synchronization of two digitizers may be used for quadrature
detection.
Another important consideration during data acquisition is the recovery time of
the receiver. In practice, the maximum SNR cannot be achieved due to the recovery
time of the FID signal, which is a result of the rindown time of the power amplifier.
The next section explores the issues of recovery time and its relation to the SNR and
the ringdown time of the transmitter.
3.5.3
Recovery time
After a high-voltage RF pulse from the transmitter is completed, there exists dead
time during which no FID signal is detectable. The time that it takes to detect an
FID signal after the RF pulse is known as the recovery time. There are two main
contributions to the recovery time:
" The receiver is saturated by the transmitter signal, which is greater than 0.6V,
the break-through voltage of standard back-to-back diodes. This means the
FID will be swamped out by the high-voltage transmitter signal.
* After the RF pulse is completed, RF excitation takes a time constant, RC = r,
to decay to amplitudes comparable to NMR FID signals.
Long recovery times contribute to poor SNR. During an RF pulse on a qubit,
the FID signal originates from the nucleus because the magnetization vector always
precesses in the Bloch sphere picture. So, the entire FID signal cannot be captured
because the maximum amplitude of the NMR signal, Vo, occurs during the RF transmission. Furthermore, the amplitude decreases exponentially with respect to recovery
time, lowering the SNR.
Since the transmitter contributes to the recovery time, the power amplifier becomes an important component to NMR quantum computing. The time an RF pulse
65
takes to decay to amplitudes below the break-through regime of the back-to-back
diodes is known as the ringdown time. Generally, the larger the qubit system has
the lower the SNR. Hence, for quantum computing, the ringdown time of the power
amplifier needs to be decreased to shorten the recovery time during readout.
3.6
Summary
We have discussed how to utilize nuclear spin-1/2 systems under a large magnetic field
for quantum computation. Single- and multiple-qubit operations are achieved using
NMR techniques. Classically, an RF field applied to a single qubit at the resonance
frequency causes the magnetic moment of the nucleus to rotate about an axis as
described by the Bloch equations. This is a key concept introduced in this chapter,
i.e., quantum circuits can be implemented by a sequence of RF pulses. The control of
qubits is accomplished via the pulse programmer and the power amplifier; the pulse
programmer is used to generate pulse sequences, and the power amplifier contributes
to the amplification of the pulse as well as SNR on the readout.
We have examined the requirements for the pulse programmer and the power
amplifier. The pulse programmer requires complex, arbitrary pulses with precise amplitude and phase control. The pulse programmer is an integral part of the NMR
spectrometer, controlling most of the functionality of the system and interfacing between the computer and the spectrometer. The pulse programmer is an extremely
complex design to implement. What technologies can we adapt to design a pulse
programmer quickly, and yet, targeted for an NMR quantum computer?
The readout of the FID signal can be improved by examining alternative power
amplifiers applicable to NMR technology. The power amplifier requires fast ringdown
times and low-noise amplification. For the power amplifier, naturally we ask, what
are needs for an NMR quantum computer, and are there any RF designs that match
them?
In the next two chapters, we address these questions and discuss the first steps
towards designing a power amplifier and a pulse programmer.
66
Chapter 4
Class E Amplifier
We turn the focus of this thesis towards a low-cost, power amplifier with fast ringdown
times, which meets the requirements discussed in the previous chapter. We present the
Class E amplifier (CEA) as an alternative to typical NMR power amplifiers that can
be used in quantum computing experiments. The CEA offers high
Q, fast
switching
times, high efficiency, lower costs, and a small form factor. We start by describing the
history of the CEA in Section 4.1. Next, the design equations are described in Section
4.3. We follow the design equations and implement a CEA tuned to 4.64MHz. We
conclude by describing the device's characteristics in Section 4.4, such as the ringdown
time and power efficiency.
4.1
History of the Class E amplifier
Originally introduced and patented in 1975 by Nathan Sokal [Sok75], the Class E
amplifier (CEA) was a novel design which addressed several issues in power amplifiers.
There are several trade-offs in the design of power amplifiers, including:
* size and weight,
" efficiency,
* cost, and
67
*
bandwidth.
The purpose of the CEA is to address the design issues in power amplifiers, specifically
the power efficiency versus the operational bandwidth. The design of the CEA raises
the power efficiency by sacrificing the bandwidth. But, the size, weight and cost are
reduced as well.
The design has practical applications in several industries. In the areas of telecommunications, the CEA is used prevalently. Amateur radios enthusiast immediately
found use for RF communications.
Rutledge and Lau demonstrated a high-power,
low-cost transceiver for ham radios using CEAs [LCQ+97]. Transceivers for televisions
were created by Broadcast Electronics, Inc., and other companies [Sok98]. More recently, there have been large investments in developing integrated circuits (ICs) with
CEAs for cellular phones and other wireless applications [Tsa99].
To illuminate why companies invest in CEAs for telecommunication applications,
different classes of power amplifiers are listed with their salient features.
" Class A amplifiers
- Amplifier type: linear
- Efficiency: 30-40%
- Tradeoffs: sacrifice efficiency for predictable, linear behavior.
" Class B amplifiers
- Amplifier type: linear
- Efficiency: 45-55%
- Tradeoffs: sacrifice efficiency for predictable, linear behavior.
" Class C amplifiers
- Amplifier type: linear
- Efficiency: 55-65%
- Tradeoffs: wide operation bandwidth; efficiency varies with frequency
68
9
Class D amplifiers
- Amplifier type: switching
- Efficiency: 75-85%
- Tradeoffs: reasonable operational bandwidth with high efficiency in audio
frequencies
* Class E amplifiers
- Amplifier type: switching
- Efficiency: 85-95%
- Tradeoffs:
narrow operational bandwidth, but extremely high efficiency
and small size.
Compared to other amplifiers, CEAs are extremely efficient and small. For cellular
phones, these qualities are ideal for longer battery life and compactness.
Narrow
bandwidth and optimal operation in the microwave regime make them suitable for
communication protocols, such as code-division multiple access (CDMA) and timedivision multiple access (TDMA). Although not obvious, the features of CEAs can
also be attractive for NMR quantum computing applications.
Typically, Class C power amplifiers are used in NMR spectrometers.
Class C
amplifiers are linear amplifiers, offering a wide bandwidth of operation and higher
efficiency than Class A,B, or AB amplifiers. Class C designs are suitable for modern
NMR spectroscopy experiments that involve biology or chemistry because Class C
amplifiers are capable of operating over a wide range of frequencies, allowing the
spectrometer to tune to various frequencies.
However, quantum computers do not require wide bandwidth. In quantum computing, the Hamiltonian of the system is known in advance, and thus, the frequencies
to control qubits are known. Quantum computing requires optimizations not found in
general-purpose spectrometers. Narrow bandwidths and high Qs are two particularly
desirable features, making CEAs candidates.
69
4.1.1
Motivation: a solution to increasing SNR
In Section 3.5, we discussed some potential problems with NMR hardware in relation
to NMR quantum computers. As the number of qubits increases, the SNR poses a
critical problem for NMR quantum computers. One possible way to increase the SNR
is to maximize the FID signal by decreasing the ringdown time of the power amplifier.
The CEA provides a possible solution to increasing the SNR because it has switching
times with overall faster rise and fall times than Class C amplifiers.
Furthermore, the high
Q resonance
provides a narrow operational bandwidth. For
NMR quantum computation, narrow widths allows for accurate qubit control because
the amplifier acts as a filter, removing broadband frequencies, which may introduce
more errors in a quantum computation. In addition, the size of a CEA is small in
comparison to other classes of amplifiers. This makes it attractive for the possible
integration of a probe and amplifier on a single circuit board.
Although CEAs are suitable for NMR quantum computers, we briefly describe
two potential applications for CEAs in NMR spectroscopy. For small desktop NMR
devices [Mag99], CEAs can have an immediate impact because they may be cheaply
integrated into a desktop system.
Moving towards smaller scales, we find that CEAs may be potentially applied to
NMR micro-coil spectroscopy applications. ICs with coils on the scale of microns,
between 50Qpm to 100pm in diameter, have been developed in research labs for spectroscopy on drugs and small biological elements [PML94]. However, currently there
do not exist RF transmitters integrated with the micro-coils.
Since a CEA lends
itself well to digital logic, due to its switching behavior, IC designs of a CEA may
potentially be integrated into an NMR micro-coil spectrometer, which are known as
a spectrometer on a chip (SOC).
4.2
Operation and design
The operation of the switching CEA is described. Figure 4-1 is a schematic, and
Figure 4-2 is the ideal input and output to the amplifier. Intuitively, the CEA works
70
as follows:
* When the transistor is switched off, the current flows into the load network
causing a transient rise in voltage.
The inductor helps pull the voltage VD
above Vdd. In the ideal case, VD peaks at 3 times Vdd. The parallel capacitor
C1 is charged until it looks like a short to ground, causing VD to peak and fall
back to OV.
" When the transistor is switched on, the voltage remains at OV and C1 is discharged through the transistor.
The CEA only works for a narrow bandwidth. The input source VIN is applied at the
resonance frequency of the CEA, which is determined by the resonance load network,
as shown in Figure 4-3.
The configuration and operation of the CEA maximizes power efficiency by minimizing the power dissipation through the RF power transistor. The power dissipation
across the transistor is the product of the transistor voltage and transistor current at
each point in time during the RF period. Ideally, during operation of the circuit, high
voltage and high current do not exist at the same time. As long as the slope of the
voltage is OV during the transition from off to on, and vice versa, the ideal efficiency
is 100% [Sok75]. The efficiency assumes that ideal components are used. In practice,
the power efficiency ranges from 80% to 95%.
71
VDD
L1
VDi
C2
L2
OUT
L3
C1
IN
02
500
03
Figure 4-1: A schematic of a Class E amplifier is shown. The resonant load network
circuit is used to tune the resonant frequency of the amplifier.
VN
VD[
ON
AO/1>
VOUTj
time
1 period
Figure 4-2: Example of ideal, transient waveforms for the input and output of the
Class E amplifier. When the gate is switched on, the voltage at the drain VD decreases,
while the voltage VOUT increases. When the gate is switched off, VD rises and VOUT
decreases.
72
4.3
Design equations
We now present the design equations for the CEA. These equations are from the most
recent paper by Sokal [SokOO].
R
P =
0 .57 6 80 1
)
F(Qoad)
2 )
()2
S=V
P=
c/4 + 1 )FQo
V)
(V(VCC -Vc-)2
2
1.0012-
0.4517
0
0.4024)
(4.1)
l oad
Qload
where F(...) is a least-squares fitted function dependent on Qload and statifies the
relation among P, R, Qload, V, and Vo given in Table 4.1.
(VcC - Vo))
R = 0.576801
\P
1 ( r2/4+1)
C
27rf R
2/22
2iR
2 rf1R)
/)
)
0.4517
Qload
0.99836 + 0.91394
Qload
Qloa
0.4024
)
(2
0.7
2rf2L1
1.0316
0.7
Qoad
(27rf)2L 1
1.0147
1.0013+ Qload - 1.7879)
Qioad - 0.1048
QloadR
2=
27rf
(4.2)
l~oad
1.0316
(Qoad
0.99836 + 0.91394
C, 34.2219f R
C2 =
(1.0012
(4.3)
(4.4)
(4.5)
Here,
*
Qload is the desired
Q of the circuit,
" R is the load resistance,
* C1 is the parallel capacitance of the circuit, which includes the output capacitance,
73
o
C2 is the capacitance in series with L 1 ,
"
L 2 is the inductance, which is determined by the designer's choice of
"
L 1 is the inductance connecting the drain voltage to the power supply,
Qload,
" Vo is the transistor saturation offset voltage,
" L 3 and C 3 make up the tank circuit which transforms the R accordingly, and
* P is the desired output power with a 50% duty cycle.
00
20
10
PR/(Vec - V0 ) 2
0.57801
0.56402
0.54974
C27rfR
0.18360
0.19111
0.19790
C 2 2-FfR
0
0.05313
0.11375
Qload
5
0.51659
0.20907
0.26924
3
0.46453
0.21834
0.63467
2.5
2
1.7879
0.43550
0.3888
0.35969
0.22036
0.21994
0.21770
1.01219
3.05212
oo
Table 4.1: Dependence of P, R, V,
and V on Qload [Sok98]
Using the design equations, two CEAs were created, one at 34Mhz and the other
at 4.64MHz. Each amplifier was designed by a different graduate student. Based on
the design equations, Yael Maguire designed a CEA tuned at 34MHz, while I designed
a CEA tuned at 4.64MHz. Table 4.2 shows the values for the CEA. In the 4.64MHz
CEA, C3 and L 3 are used to transform the 50Q load to a 1OQ load. By transforming
the 50Q load to 1OQ, reasonable values for C1 and C2 can be attained. We focus the
design the 4.64MHz Class E amplifier.
We observe that designing a CEA for low frequencies is a rather difficult endeavor.
The design equations given by Sokal fail to match closely with ideal values, especially
with the introduction of the tank circuit. Intuitively, we can see that the imaginary
part of the tank circuit may yield an undesirable phase, thereby lowering the performance of the amplifier. The CEA has a bode plot such that the gain is attenuated
at the frequency of interest. Therefore, instead of strictly adhering to the results of
the design equations, we simulated the circuit using Protel.
74
parameter
value
C1
C2
330pF
10iF
03
L,
54pF
nF
1.8pF
6.5pH
L2
L3
Table 4.2: Parameters used for the design of a CEA. The resonance frequency is tuned
to 4.64MHz.
4.4
Class E amplifier characteristics
Figure 4-3 shows the design of the circuit. Once the design was verified, the circuit
was built using proto-boards outsourced to and fabricated by a manufacturer.
\k d= 22V
V
1.8pH
10gF
drain
1
AC f\
Signal
33pF
30F1-n
1 1500
in
Figure 4-3: The Class E amplifier schematic shown for amplifier tuned at 4.64 MHz.
The amplifier characteristics were measured after the circuit was stuffed by soldering discrete components onto the PCB. The power transistor chosen for this application was the IRFP45OLC from International Rectifier. First, the CEA behavior
was measured by examining the voltages at the drain and the gate of the switching
transistor with the Tektronix TDS3054. After the behavior was confirmed, the efficiency was measured. The efficiency was determined by measuring the total power
supplied through the drain of the transistor and the total power dissipated in a 50
test, or dummy, load. The power was measured by determining the current supplied
75
to the transistor and the current through the test load.
The drain voltage and gate voltage were measured and confirmed that the CEA
was operating in the optimal range, as shown in Figure 4-4. The peak drain voltage
was 2.7 times greater than Vdd, matching closely the ideal predictions. The spike
behavior observed in every drain voltage cycle was associated with the sudden change
in the MOSFET's current due to the transistor turning on
76
(gate
>
6.5V).
Voltage vs. Time
60
e
V rain
f\
400
0.2
0.4
time[psec]
Figure 4-4: Measurements of the voltages at the drain and the gate of the power
transistor are shown. The drain voltage is about 3 times the gate voltage, fitting
closely with theoretical predictions.
Several parameters were measured with Vdd set at 22V with a continuous waveform
at the input with th frequency of operation set to 4.64MHz. Table 4.3 shows the
measurements and simulation values. Two high-power dummy loads were used to
calculate the RMS current by measuring the RMS voltages across both loads. All
measurements were obtained while the circuit was running in continuous mode.
The measured value of efficiency is 98%. The percentage error is about 7.6%.
The efficiency is extremely high, suggesting the measured value may not be correct
because typical efficiencies are 90%. The ringdown time is 6 As, which is considerable
less than the 20ps ringdown time of a linear power amplifier from AR Amplifiers.
77
value
3.44W
3.5W
98%
2.85
Q
Ringdown time 6psec
parameter
Output power
Total power
Efficiency
simulated values
3.35W
3.7W
90%
3
N/A
% error
2.6%
5.4%
7.6%
5.2%
N/A
Table 4.3: Class E measurements: the measured and simulated values of the amplifier
are shown in the table. The percent error is also displayed.
4.4.1
Measurement difficulties
There are several issues involved in the measurement technique which may lead to
an inaccurate measurement. Although a high-power resistor was used to measure
the total power supplied to the circuit, the total output power was greater than the
maximum rating of the resistor. As a result, the resistor burned out and had to be
replaced several times.
A future technique to accurately determine the total power dissipation by the
CEA is to use several resistors in parallel to measure the power. By varying the
resistance load, the current at 0 Q can be extrapolated.
Figure 4-5: The Class E amplifier shown for the amplifier constructed and tested.
The resonance frequency is 4.64MHz.
78
4.5
Summary
The CEA has various characteristics and features that are applicable to the industries
of telecommunications and, more recently, NMR spectroscopy. The design of the CEA
trades operational bandwidth versus power efficiency, which fits the needs of NMR
quantum computers. We found that at low frequencies, the design equations are not
accurate. One of the main challenges was to conduct simulations using Protel, which
matched realistic values for CEA designs tuned at 4.64MHz. Once a prototype was
completed, the device's characteristics were measured and compared to simulated
values.
We provided the first steps in improving the ringdown of an NMR power amplifier,
by demonstrating CEA amplifiers operating at 4.64MHz and 34MHz and ringdown
times faster than typical power amplifiers used in modern NMR spectrometers.
79
80
Chapter 5
Pulse Programmer
NMR quantum computers require complex pulses with phase and amplitude control
to execute quantum algorithms. But what are the requirements needed for an NMR
pulse programmer? We delve into this question by examining the current advantages
and disadvantages of NMR pulse programmers, and by designing and developing two
pulse programmers, both aimed for complex, programmable pulse sequences in an
NMR quantum computer.
First, we examine a widely used commercial pulse programmer, and then several
previously built by other researchers in Section 5.1.
We analyze the architecture
behind such systems, developing a criteria for evaluating pulse programmers, as described in Section 5.2. Finally, we discuss the design of two pulse programmers in
Sections 5.3 and 5.4. The first system is designed around ease of use, or transparency.
For the second architecture, we concentrate on improving the timing resolution of the
system by targeting it for 10 ns.
5.1
Problem and approach
As discussed in Chapter 3, implementing quantum algorithms, such as Shor's algorithm, requires carefully designed shaped pulses. Pulse programmers are used in
modern spectrometers to produce RF pulses and perform quantum operations; however, in current state of the art pulse programmers, high cost and large size render
81
them impractical for inexpensive NMR quantum computing.
We evaluate existing hardware options for NMR pulse programmers and choose
low-cost, commercial systems to implement high-speed, sub-pus pulse programmers.
We concentrate on designing software architectures using digitally programmable logic
devices.
5.1.1
Introduction to the pulse programmer
Early in the history of NMR, typical experiments involved the use of continuous waves
(CW) methods [PW51]. CW methods offered the ability to scan across wide spectral
ranges and provided much early information about the dynamics of nuclear systems.
Since CW methods required continuous RF fields applied on the sample, the signal
at the receiver was often saturated and unstable over time. In the early 1950s, pulsed
techniques addressed the problems with CW methods.
The advantages of pulsed
excitation included:
" stable operation using linear circuitry,
" avoidance of saturation effects in the receiver,
" the ability to measure relaxation times, and
* the ability to signal-average.
These advantages made pulsed spectroscopy the preferred choice among researchers.
Pulsed methodologies are made possible by an electronic circuit known as a pulse
programmer. A pulse programmer is a digital signal generator capable of outputting
binary data patterns in parallel. The output of a single bit is represented by standard
digital input/output (I/O) signals, such as TTL, LVDS, and ECL. The outputs are
used for multifarious control purposes.
Often it digitally sets various RF circuits,
which in turn control the phase, amplitude, frequency, or time duration of an RF
signal.
As the field of NMR progressed, so did the electronics of the pulse programmer. Early spectrometers consisted of home-built pulse programmers.
82
Many first-
generation pulse programmers used analog timers and discrete logic gates for generating a limited number of pulses. This was a cumbersome approach to developing
more complex pulse sequences. In an effort to improve pulse sequence generation, engineers developed versatile, computer-controlled pulse programmers for commercial
and scientific applications. Although the pulse programmers worked extremely well,
they were often expensive and occupied several racks in a spectrometer. To address
these problems, we study a commercial pulse programmer from Varian, Inc.
5.1.2
A case study: the Varian pulse programmer
In order to understand the design parameters, we study a proven pulse programmer
used in NMR quantum computing, i.e., the Varian pulse programmer [VNM01]. The
Varian spectrometer has been used in several NMR quantum computing experiments
[VSB+01, SvDH+03b], as described in Section 3.4. In the spectrometer, the pulse
programmer acts as the interface board between the control electronics and the computer. From the computer, the user controls a multitude of parameters. The user
can change the phase, amplitude, and frequency of an RF signal.
Varian architecture
Usually, the pulses are generated in the following manner. First, the user creates the
desired pulse sequence via software on the Sun Ultra 10 workstation. When the experiment is executed, the software compiles the sequence into byte-wise code, known
as the pulse program. In Varian propriety software, the pulse program is known as
Acode. Once the code is compiled, it is transmitted via the computer's I/O bus to
the pulse programmer board's memory. Finally, a "go" command is executed, and
the byte-wise code is executed. Figure 5-1 shows a functional diagram of the pulse
programmer.
The compiled pulse sequence is fed into a first-in-first-out (FIFO) buffer, a memory
buffer, into which binary data is fed sequentially and which releases the same sequence
through the output ports. The number of words in a FIFO buffer is called the depth.
The depth of the FIFO is 4096 words. For the pulse programmer, the width of a word
is 54 bits.
83
There are two FIFO buffers in the pulse programmer, the preloop FIFO and the
loop FIFO. Normally, words "fall through" the preloop FIFO and fill the loop FIFO.
Once the loop FIFO is full, the preloop FIFO is filled until it is full. At that point, the
FIFO signals the computer, causing the words to temporarily stop filling the FIFO
buffers.
84
CPU 1/0 bus
bus decoder
fast bits (states)
times / AP bus words
preloop FIFO
width
04
loop control
multiplexer
cr D
loop FIFO
timers
CEHD
texres / AP bus words
fast bits
(states)
times
AP bus
:meter / rf
external trigger
Figure 5-1: Structure of the Varian pulse programmer [VNM01]
85
Every word in the pulse programmer contains state-related operational codes,
called "fast bits", and timing bits. Because the fast bits switch instantaneously with
any FIFO word, they directly drive the RF gates controlling various RF circuits
and blanking amplifiers through the output of the loop FIFO buffer. The timing bits
define the time count, ranging from 1 to 4096, and the time base (seconds, milliseconds,
microseconds).
When the "go" command is issued, the words in the loop FIFO are released. The
timing data are fed into the circuitry, activating the timer. The timer counts down
to zero from the time count and causes the next FIFO word to release via an external
trigger signal. With each time-step, the output of the loop FIFO is fed to the RF
circuits and a multiplexer that determines whether the data into the loop FIFO is
taken from the preloop FIFO or from the output. This scheme is known as hardware
looping.
We can characterize the Varian pulse programmer control board to the criteria
listed in Table 5.1:
characteristic
timing resolution
memory size
number of channels
minimum delay
minimum pulse width
maximum pulse width
number of control lines
system clock
definition
the minimum time-step difference,
or time to process one command
the length and width of the memory buffer
the number of pulsed RF signals
the minimum time between two pulses
the minimum duration of a pulse
the maximum duration of a pulse
the number of bits controlling the RF circuits
the frequency of the master oscillator
Table 5.1: Characteristics for evaluating the Varian pulse programmer
86
Based on our criteria, we summarize the characteristics of the Varian pulse programmer in Table 5-2.
value
25 ns
4096 words
54 bits
4
50 ns
25 ns
4096 s
34 bits
40 MHz (25 ns period)
parameter
timing resolution
memory depth
memory width
number of channels
minimum delay
minimum pulse width
maximum pulse width
number of control lines
system clock:
Table 5.2: Characteristics for the Varian pulse programmer.
Several groups have created low-cost programmers for various spectroscopy appli-
cations, including NMR spectroscopy [FMSR99, WPBM93, WSF88, Mag99].
We
summarize previously designed pulse programmers in Table 5.3, using the criteria
that we have developed:
parameter
Fisher [FMSR99]
Wachtar [WSF88]
Wu [WPBM93]
1 /-s
1 kBytes
150 ns
128 kBytes
4 /-s
64 kBytes
memory width
8 bits
16 bits
1 bit
number of channels
maximum pulse width
number of control lines
system clock
8
n/a
8 bits
n/a
16
42.9 s
16 bits
100MHz
1
1028 s
1 bit
80MHz
timing resolution
memory depth
Table 5.3: The performance of several lab-built pulse sequencers for various applications.
87
5.2
Designing an NMR quantum computer pulse
programmer
From Table 5.3, we find that programmers have a limited number of RF channels,
control lines, and memory size. For NMR quantum computing, the current generation
of pulse programmers are not optimized.
An ideally designed pulse programmer
should provide fine resolution times, under 1[ps, thus generally making the system
clock greater than 1MHz. It should also have maximum pulse widths greater than
the TI and T2 times of the samples (times on the order of hundreds of seconds
are more than adequate).
On the software side, the program to control the pulse
programmer should be simple and easy to use. We introduce two designs, using two
different hardware solutions; each one has their advantages and disadvantages. The
first design aims at typical NMR applications with sub-ps pulse widths and ease
of use, and whereas the second design aims is a general-purpose pulse programmer,
targeted for high-speed applications with pulse widths at 10 ns.
5.3
First-generation pulse programmer
As a first pass in the design phase, we design a pulse programmer that is comparable
to the Varian pulse programmer. First, we examine the design of the architecture
for the system. Then, we describe the hardware and software implementation of the
pulse programmer. Since the hardware is a Rabbit 2200RCM module, we dub this
pulse programmer the Rabbit pulse programmer.
5.3.1
Architecture of first-generation pulse
programmer
In the design of the Rabbit pulse programmer, we consider abstracting the functionality of the pulse programmer into the following layers of communication:
88
* user layer: the user interface to the pulse programmer, e.g., a personal computer connected to the pulse programmer.
" interface layer: the communication protocol between the user layer and execution layer; and
" execution layer: the implementation of the pulse sequencer (also known as
the hardware layer).
The design of the system is critical.
When we design the pulse programmer, the
following design issues are considered for each layer:
* The user interface: A transparentuser interface is desirable. In computer software, an action is transparent if it takes place and is hidden to the user. Another
relevant design parameter is the concept of platform independence. Platform
independent design accommodates multiple operating systems (OS), so that
future upgrades to personal computers will be compatible with the pulse programmer. Lastly and most importantly, the control of the pulse programmer
must be appropriate for quantum computing and address quantum computing
needs.
" The interface layer: The concept of a transparentuser interface also applies to
the interface layer. This layer dictates the communication between the user and
the pulse programmer. A transparent protocol is desired so that the communication between the user and the pulse programmer is reliable. The protocol
must guarantee that the data arrive in the proper order.
" The execution layer: We seek a synchronized microprocessor that is low-cost
and relatively easy to use.
Our solution is shown in Figure 5-2. The user layer consists of software, allowing
one to input a desired pulse sequence (see Section 5.3.3). There are three methods of
input: (1) a file containing the pulse sequence can be uploaded, (2) the pulse sequence
can be directly typed, and (3) the sequence can be sent via http post method. The
89
software is written in PHP - a wide purpose, general scripting language that can be
embedded into html [LT02]. PHP code utilizes the http protocol to communicate
with different clients. Hence, we achieve platform independence if the OS supports
http communication.
Given that Internet protocols are selected, we can take advantage of the TCP/IP
for the interface layer. The protocol guarantees reliable communication between the
client and the server. If the pulse programmer acts as a server, then pulse sequence
codes can be sent over a TCP/IP link. Through http post/get methods, the server
can extract the pulse sequence sent from the client, or user. The pulse sequence code
is compiled into byte code (sequence of bytes), which is sent to the execution layer.
Pulse Sequence
(fike,
;php-cgi itraeCompiler
text, Cgi inpuA)
(Co"pits putst s0q in
Opeodes ond nms it)
Interpreter
Figure 5-2: Block diagram of the first-generation pulse programmer.
The execution layer represents the hardware, or pulse generator. The architecture
is shown in Figure 5-3. The pulse generator stores the compiled data into a buffer.
Next, the pulse sequence executes the commands stored in the buffer. An interpreter
loops through the buffer, executing each command. These commands are listed in
Section 5.3.3.
5.3.2
Hardware implementation of first-generation pulse
programmer
The hardware for the pulse programmer is a Rabbit RCM2200 module, an embedded
microprocessor. A block diagram of the module is shown in Figure 5-4. The Rabbit
90
I
I
Data
512 kB program
Figure 5-3: The hardware uses a buffer to store the pulse sequence and access the
commands during execution.
RCM2200 is an 8-bit microprocessor that supports the "C" programming language.
512 kBytes of SRAM memory are reserved for the program, and 256 kBytes are
reserved for data. Other significant features of the processor include the following:
" a system clock of 22.1MHz,
* on-chip peripherals including serial ports, parallel I/O (shared among ports
A,B,C, and D), two built-in timers (ports A and B), and
" C library supporting UDP and TCP/IP protocol stack, FTP, http, SMTP, and
DNS.
Support for UDP and TCP/IP protocol ensures reliable communication between the
user and pulse programmer. UDP offers minimal service over IP and guarantees end91
Figure 5-4: The Rabbit RCM2200 module used as the hardware for the firstgeneration pulse programmer.
to-end communication. Meanwhile TCP guarantees proper order of data delivery and
end-to-end reliability.
The module is used in conjunction with a daughter board, which I designed. The
daughter board has several functions. First, it routes all the I/O pins to two 40-pin
headers, easing testing and debugging of the circuit. Second, it provides power to the
RCM2200 module. Third, it is small and modular for easy mounting to other boards
or RF boxes. Lastly, four channels output the pulse sequence. The daughter board
is shown in Figure 5-5. The hardware provides the foundation for the software.
Figure 5-5: The daugther board customized for the Rabbit RCM2200 module.
92
5.3.3
Software implementation of first-generation pulse
programmer
The software for the pulse programmer consists of two elements: the PHP code for
the client interface and the C code. The source codes are given in Appendix B. We
focus on operations for both the client and server applications.
Client software
The client software relays pulse sequence codes to the pulse programmer via an HTML
web page. It provides three options to relay data to the pulse programmer, as discussed in Section 5.3.1. The user can input data using the following methods: (1)
a file containing the pulse sequence can be uploaded, (2) the pulse sequence can be
directly typed, and (3) the sequence can be sent via http post method. In all three
methods, the pulse sequence code is being sent to the pulse programmer.
The pulse sequence code instructs the pulse programmer how to change the state
of the system. It is composed of individual operational codes. Each operational code
changes the state of the output channels of port C. The format is as follows: an
operational code is sent, followed by a one-byte parameter in ASCII format ranging
from 0 to 255. We summarize the available commands in Table 5.4.
operational code
CO
C1
C2
C3
C4
C5
description
delay execution of next command by x ps (range 0-255)
delay execution of next command by x ms (range 0-255)
delay execution of next command by x s (Range 0-255)
output one-byte of data on to port C
output one-byte of data on to port B
no operation
Table 5.4: The list of operational codes available to the RCM2200 pulse sequencer.
Currently port C is the only available output channel.
An example
We illustrate the client software by describing a pulse sequence. Let channel one be
pin CO, and channel two be pin C2. Both channels start with low output. After one
ms, channel one is set high. Then after 10 ps, channel two is set high. One second
93
later, both channels are set low. The pulse sequence code for this sequence is given
as:
C1 1 C3 1 CO 10 C3 5 C2 1 C3 0.
Pulse sequencer
In order to obtain the data sent by the client, the Rabbit RCM2200 runs a web
server, which listens to incoming connections on a specified port. In this case, the
port is set to 80, the standard http port. The web server instantiates events when
incoming data are detected. The port is read and the data arrive in the following
format: http://192.168.1.10/sendPulse.cgi?data=C&10&C1O,
where the ip
address denotes the server. The parameters are the code and the repeatnum. The code
is the pulse sequence code, and the repeatnum instructs the pulse programmer how
many times to repeat the pulse sequence. When the data is read by the server, it is in
the format sendPulse.cgi?code= Cl1C31C010C35C21C30&repeatnum=O.
The pulse sequencer parses the data and compiles the code into a byte sequence
and stores the sequence into a buffer. The operational code is directly translated
into the following byte codes: CO -* OxOA, C1 -- 0x10, C2 -- 0x11, C3 -
0x12, C4
-+ 0x13, and C5 -- 0x14. The operational code and parameters are stored in the
order of arrival. Once the code is translated to byte code, the sequencer executes the
program. If the repeatnum parameter is 0 or less, the pulse sequence is executed an
infinite number of times; otherwise it is run for x number of times, where x is the
parameter of repeatnum.
Now, we examine the state machine in Figure 5-6, which describes the execution
phase of the pulse programmer. From the state machine, we find there is an overhead
time associated with the execution of each command (see Section 5.3.4 for more
details). In the RCM2200, each command requires several clock cycles to determine
which operational code to execute. Thus the limiting factor to the timing resolution
is the amount of time to determine the command. With this knowledge, we can begin
assessing the performance of the pulse programmer.
94
zzi-rx1d
CO
pcommand
r
'
ddla
ay In
Nyfr
-
ytnopr
delay Inotu
0
-
outpu byte
to port C
sooonds
Figure 5-6: The state machine for the rabbit pulse programmer.
5.3.4
Performance evaluation of first-generation pulse
programmer
We characterize the performance of the pulse programmer by evaluating the (1) timing
resolution, (2) SRAM width and depth, (3) number of channels, (4) system clock, (5)
minimum delay, (6) minimum pulse width, and (7) maximum pulse width. The clock
speed and SRAM size and depth are determined by the hardware.
Measuring the timing resolution
Each byte code is interpreted in real time by the pulse programmer. During execution,
there is an overhead in time for processing the byte code. Figure 5-7 highlights the
overhead between each command. The additional overhead is critical to accurate
timing.
The shorter the time it takes to execute a command, the higher timing
resolutions we can achieve. We must minimize the overhead time to maximum the
resolution.
Measurements on the pulse programmer are made with a Tektronix TDS3054
oscilloscope. On average, the time to process one command, or the time resolution,
95
now
I-
T!=
a on
operation
off1-
70
overhead
I
Time
Figure 5-7: Anatomy of a pulse sequence. Each operation has an associated overhead
cost for processing a command. The larger the overhead time, the higher the timing
resolution.
is 1.15 Ms. This limits minimum delay time between two "on" pulses to 2.30 ps.
However, this does not mean the the pulse width is a multiple of 1.15 ps. From the
state machine, a for loop is used to delay in the software code. The delay loop has a
delay time of 235 ns. Because of the short delay times, we can finely tune the Rabbit
pulse programmer to generate ps pulse widths.
The characteristics of the Rabbit pulse programmer are summarized in Table 5.3.4:
parameter
timing resolution
memory size
number of channels
minimum delay
minimum pulse width
maximum pulse width
system clock:
value
1.15 Ps
256 kBytes (but 128 kBytes of commands)
4
2.30 ps
1.15 ps
255 s
22.1 MHz
Table 5.5: Characteristics for the Rabbit pulse programmer.
Lessons learned
The first-generation pulse programmer met most of our design goals. The pulse programmer has multiple interfaces that allows one to program complex pulse sequences.
96
There is enough memory to program large pulse sequences, easily accommodating
NMR quantum computing experiments. The minimum pulse width is 1.15 ps, which
did not meet our target range. Although, this is adequate for most NMR applications, it is not suitable for general-purpose applications, such as pulse programmers
for electron spin resonance (ESR) or superconducting quantum computing. Another
problem is the lack of control lines. For pulse shaping, the digital I/O from the pulse
programmer controls analog circuits, particularly the phase, amplitude, and duration of the pulse.
The hardware is limited in the number of control lines.
Thus,
another iteration of the design is necessary in order to improve the speed of the pulse
programmer.
5.4
Second-generation pulse programmer
In the next iteration of the design, the goals are higher speeds with a timing resolution
of 10 ns and more control lines for analog circuits. We concentrate on the software
architecture for this pulse programmer and limit our designs only to the digital I/O.
First, we describe the architecture in Section 5.4.1. Then, discuss the hardware and
software implementation. Finally, we evaluate the pulse programmer in Section 5.4.4.
5.4.1
Architecture of second-generation pulse
programmer
Figure 5-8 shows the structure of this version of the pulse programmer. The overall
structure is similar to that of the Varian design, which is shown Section 5.1.2, except
one FIFO is used in the system, which removes the multiplexer. The system works
as follows. Data is sent to the programmer from the acquisition CPU via the CPU
I/O bus. The data is decoded and stored into the FIFO in the order of arrival. Like
the Varian system, when a "go" command is issued, the data is read from the FIFO
and placed into the RF module.
97
CPU IO bus
bus decoder
depth aeng!h)
FIFO
Width
-VP
Figure 5-8: Structure of pulse programmer for the second-generation pulse programmer
The data sent to the FIFO are commands that change the state information
of the RF output. Like the previous design, shown in Section 5.3, the commands
includes timing information, such as n- and pa-s delay. The RF module represents
an interpreter which reads the commands and changes the state information of the
system. Section 5.4.3 contains more information about the software implementation
of the pulse sequencer.
5.4.2
Hardware implementation of second-generation pulse
programmer
The pulse programmer architecture described in Section 5.4.1 can be implemented by
extending the hardware platform to field programmable gate arrays (FPGAs). An
FPGA is a chip with combinatorial logic, lookup tables, wires, and flip flops in a
2-dimensional array. Each node, or logic cell, in the 2D grid has control circuitry that
tells it how to connect to the rest of the grid. Depending on how it is programmed, the
logic cell can perform digital logic operations such as AND, XOR, and OR. In large
2D grid arrays, the operations can be "strung" together to create complex, digital
98
circuits like multiplexers, adders, multipliers, and dividers. Using FPGAs allows precise allocation of digital resources, offers inherent parallelism, reduces implementation
time, and lowers production costs.
The pulse programmer is implemented on an FPGA system, using a Digilab 2E
(D2E) evaluation board from Digilent, Inc., as shown in Figure 5-9. The D2E uses
a Xilinx Spartan XC2S200E chip from the Spartan IE family. The XC2S200E has
200,000 system gates, 5,292 logic cells, 512K SRAM, 289 I/O pins, and 4 phase lock
loops (PLLs). On board a D2E, there are RS232 drivers, dual 1.5A power regulators
at 2.5V and 3.3V, a pulse button and LED for basic I/O, six 40-pin right-angle,
DIP sockets, and a 50 MHz oscillator. Six expansion slots are used on the board.
Expansion slots A and E share 37 pins, and expansion slots B and F share 11 pins.
Expansion slots C and D each use 37 pins. Slots C and D are closest to the FPGA,
providing the shortest possible route. Thus connectors C and D are used for high
speed output, with data rates up to 100 MHz attainable. Overall 74 pins are available
for I/O. The D2E board is designed to work with Xilinx ISE CAD tools. The software
used is Xilinx Foundation ISE 4.0. The programming language used for the Xilinx
FPGA is VHDL.
5.4.3
Software implementation of second-generation pulse
programmer
Since VHDL is a concurrent level language, i.e., it can be viewed as parallel programming, we can organize the flow of the code into separate entities, which makes the
code modular, easy to understand, and portable to other VHDL applications. The
entities include the following: (1) pulse programmer finite state machine (FSM), (2)
serial communication block, (3) LED FSM, (4) clock divider, (5) serializer, and (6) the
main FSM. The main entity instantiates all other components and concurrently runs
each component through its own FSM. Figure 5-10 shows each entity and connections
between entities.
99
Power
jackfl
5-9VDC
li
2.5VDC
guato
50MHz
CLK
Push
button
tatuS
LED
I.3vDcI
reguatr1
EPP or SP
parallel port
L
Xinx Spaitan2E
XC2S200E-PQ208
r4I
Por PPo
Port
fJ
TAG
Expansion A
control.
swichExpansion E
ExpansionB
Expansi n
F
Figure 5-9: Functional block diagram of Digilab 2E development board [Dig02]
A short description of each entity and its relationship to others is presented. The
pulse programmer FSM executes the sequence of byte codes stored in the FIFO, as
shown in Table 5.6. During the execution, the pulse programmer FSM requests new
commands from the main FSM. Once a new command is received, the command is
executed. The process of retrieving and executing a command is critical for high
timing resolution.
The serial communication block uses concurrent processes to transmit/receive
data to/from the computer. Data received is sent, via the receive signal (rdx), to
the main FSM for processing. The commands are sent via a DB9 serial cable to the
device. Transmission occurs when one-byte of data is latched to the device and when
transmission is enabled.
Sixteen LEDs are controlled via the LED controller. Data is read/written from/to
the LED through the main FSM. The main FSM requests read/write operations via
read/write signals.
The clock divider is an entity which divides the system clock to lower rates. The
lower frequencies are used to clock certain entities, such as the LED controller. Only
100
VHDL Microprocessor
Clock
Divider
-mclk-
reset
FIFO I
mik
d2io clk
uart-clkl
wr
e
rd-en
empty
reset
uartck2
+-
t_ data[7:0]
-
Iedu reemctk
rdx--
UART
C~nrO|er
dsr
tdx
Man
data[7:0]
rcv
uart~clk_1
uar~ci_2
txenable
-
FSM
tx-latch
Prstee "u s
rstNProgrammer
command[7:.
-- reqcmd
FSM
b-x_ready
reset
d2Controller
d2io-clk
Serializer
channeloutput
I
D210
Board
Figure 5-10: Main framework for VHDL code
one clock divider is instantiated.
The serializer entity enables a higher throughput of the pulses. It takes parallel
input data and clocks out the data serially.
The main FSM unifies all the components and controls communication between
components. It executes the command set described in Table 5.4.3. Although full
duplex communication is possible, for simplification, the main FSM implements halfduplex communication between the pulse programmer and the computer.
Pulse sequence code
The pulse sequence code is a language that describes the pulse sequence. A user
writes a sequence of codes which controls the output of the desired channel(s). The
101
code is compiled into byte code and sent from the computer to the pulse programmer.
Byte code is store in a FIFO on the pulse programmer. Once a "GO" command is
issued, the pulse programmer executes the byte code in the order originally sent.
The following table explains the syntax and command for the pulse programmer
code. The byte corresponding to the command is given as well.
opcode
CO
C1
C2
C3
C4
C5
C6
hexcode
Ox00
Ox01
0x02
0x03
0x04
0x05
0x06
description
null operation
set I/O pin y to ON state (3.3V)
set I/O pin y to OFF state (3.3V)
delay I/O pin y for x ns
delay I/O pin y for x ps
delay I/O pin y for x ms
delay I/O pin y for x secs
Table 5.6: Pulse sequence byte code and operational code for the pulse programmer.
Note that the pulse sequence commands for the pulse sequencer are limited to
hexadecimal codes under OxlO. This is subject to change in the future.
To control the general functionality of the pulse programmer, a set of general
control commands are sent. Thus far the control command set is small and performs
simple tasks. Table 5.7 lists the hexcode and the associated command.
Pulse programmer finite state machine
hexcode
OxOA
0x0B
Ox0C
OxOD
xOE
Ox11
description
store sequential byte code (pulse sequence commands) into the FIFO
indicate storage into FIFO is complete
state pulse programmer
request an acknowledgement from the pulse programmer
read data in FIFO
latch following byte to LEDs (debug tool)
Table 5.7: Control code for the pulse programmer
The pulse programmer FSM executes the pulse programmer sequence commands
stored in the FIFO. The FSM machine is shown in Figure 5-11. Initially, the state
starts in the the exit state. In this state, nothing occurs. When enable is set to "1",
the FSM moves to the idle state, where upon a request, the command flag is set to 1.
102
This indicates a byte code is requested by the interpreter. If the FIFO is empty, the
enable signal is set to 0, returning to the exit state. Otherwise the FIFO is read and
a new command is issued. The FSM executes the command, moving into the desired
states. After the command is executed, the state is set back to the idle state. This
cycle may repeat.
The main goal in this pulse programmer is to achieve 10 ns pulse widths, aiming
the overhead from executing a command critical to the design. The pulse programmer
is limited by the Xilinx FPGA architecture. For example, the time taken to request
a command, read from the FIFO, and detect a new command must be minimized.
Currently it takes 10 clock cycles to read from the FIFO, because the clock to drive
the FIFO is synchronized by the system clock. Thus overhead is approximately 200
ns on a 50 MHz clock. Scaling up to 150 MHz lowers the overhead to 66ns. We
examine three methods to increase the timing resolution.
The first method is to use pre-programmed pulses.
For extremely fast pulses,
i.e., less than the 200ns barrier, special codes may be used. An example is having a
command which sets the output channel high and, after a set period of time, sets it
low automatically.
Another way to speed up the overhead time and reduce the number of cycles is
to read from the FIFO as the pulse programmer FSM is executing. Then, in the
worst case scenario, the maximum number of clock cycles is 10. For most commands,
there will be 4-5 clock cycles of overhead. This reduces the overhead by a factor of
2. Reaching 100 ns (at 50 MHz) overhead is more than a possibility.
The last possibility is to process is to use parallel-to-serial converters to output the
pulse sequence at clock speed. The drawback is the difficulty in implementation. The
parallel-to-serial converter must be loaded at the appropriate times to keep the buffer
full. We choose to improve the initial timing resolution by using parallel-to-serial
converters.
103
---
reset
stReset
stExit
enable = 1
enable=O
stidle
n~comma
new command = 1
= stDelayMics
= eghcommand
new-command = 1
=stSetLwcmmn
command
new-command = I
=c1ommand = stDelayNs
command = stNull
stSetHigh
stSetLow
stNull
stDelayNs
stDelayMics
Figure 5-11: The finite state machine for the pulse programmer entity. The initial
state is the exit state. In this state, the pulse programmer loops infinitely. When
an enable signal is set, the state machine executes command code fetched from the
FIFO.
104
Serial (UART) communication
Communication to the pulse programmer occurs through a DB9 serial connection.
The serial communication protocol follows standard universal asynchronous
receive/transmit (UART) specifications. The UART implemented does not perform
handshaking (CTS/RTS) or parity checking. Currently, the serial communication is
set to transmit/receive for a baud rate of 9600 kBps, 8 bits, N (no) parity checking,
and 1 stop bit. The protocol works as follows:
For transmission: the transmission line (TXD) is held in a high state (1). When
the line goes low (0), it indicates a start bit. Eight bits of data are sent at the specified
data transfer rate. On the 10th bit, TXD is set to 1.
For receiving: the data are sampled on the receive line (RXD) at 16 times the
baud rate. When 0 is sampled, a start bit is indicated. Each bit is sampled after 16
clock cycles. On the 10th bit, a stop bit is detected. If a stop is not detected, the
receiver still assumes the data are completely sent.
Figure 5-12 displays the UART data format. The indication of a transmission is
a low start bit.
start bit
step bit
Figure 5-12: UART data format.
LED controller
The LED FSM reads/writes data to 16 LEDs on the Diligent Inc. D210 board.
The LEDs serve as a debugging tool. Sixteen bits of data can be sent out and viewed.
This process helps speed development time. The FSM is shown in Figure 5-13.
The component always outputs a slow clock to the D210 board. The state machine
starts in an idle state, which continuously updates the D210 board. When a read
signal is detected, data are latched from the input pins and stored in a read buffer.
105
When a write event occurs, the data in the write buffer are latched to the same input
pins. Note that it takes two clock cycles to read/write data.
The state machine
latches the first low byte followed by the next high byte. The status flag indicates
that the bus for the D210 board is ready to be read/written (when it is set to 1).
Clock divider
The clock divider is an entity which simply takes the master clock input and
divides the frequency down. The output frequencies include the clocks for the D210
board and the UART entity. It uses a counter to divide the system clock into the
appropriate frequencies.
Serializer
The serializer takes parallel data and clocks the output serially to the output pin.
The data are latched parallel via a latch flag. The serializer can be reset/set, causing
the parallel data to become 0/1. The serializer is implemented to decrease the timing
resolution of the pulse programmer.
The main state machine
The main FSM controls the messaging between entities. For instance, data can
be read/written to the FIFO, LEDs, and serial port. The state machine also controls
the flow of data to and from the computer. The FSM is shown in Figure 5-14. Only
the general states are shown in the diagram. There are numerous intermediate states,
but they are left out of the discussion (see Appendix B for more details).
The default state is the idle state. In this state, the FSM waits for commands
from the UART entity and responds accordingly. Based on the command received,
the next state will be set. The possible states which can be run are the following:
" Acknowledgement (stAck),
" Latch data into FIFO (stLatch),
" Latch data to LED (stWriteLed),
" Read FIFO (stRead), and
* Start pulse programmer (stStartPP).
106
A brief description of each state and its functionality is given in the order presented
above.
When an acknowledgement command is received, a one-byte code is sent back to
the computer, acknowledging the pulse programmer is alive. The one-byte code is
0x30.
If the data command
xOA is detected, then subsequent data received in the UART
is stored in the FIFO. There is one stipulation. The data sent to the FIFO must be
command codes (found in Table 5.6). An escape code (OxODB) is sent to change to
the idle state.
107
---
reset
stReset
stidle
read~latch = 1
;tatus = 1
write_latch = 1
stReadLo
stWriteLo
status = 1
status=1
status
stReadLob
stWriteLob
status = 1
status=1
stReadHigh~b
stWriteHigh~b
Figure 5-13: The finite state machine for the LED controller. The LED utilized is on
the Diligent Inc. D210 board.
108
Data can be latched to the LED. If the command is issued, then the next byte is
displayed on the LED. Once the byte is shown, the state changes to the idle state.
A read command (OxOE) causes data to be read from the FIFO and transmitted
to the computer via the UART. The state moves to the idle state after execution of
the transmission.
The last command is the "GO" command (OxOC), which starts the pulse sequence.
Upon execution of this command, the pulse programmer FSM is enabled. Data are
read from the FIFO and sent to the pulse programmer FSM, whenever a request
command is sent from the pulse programmer FSM entity. When the FIFO is empty,
the pulse programmer FSM is disabled, and the state changes to the idle state.
reset
stReset
stidle
read-latch = I
rcv-data =
recv__data = MxA
rcv_data =
OxE
FF
Ox0C
mt
1
revdtxBrcv_data =Ox
stAck
stLatch
stWriteLed
stRead
stStartPP
Figure 5-14: The main finite state machine shows the overall behavior of the pulse
programmer.
109
5.4.4
Performance evaluation of second-generation pulse
programmer
We measured the characteristics of the pulse programmer and examined the following:
(1) timing resolution, (2) memory size, (3) minimum delay, (4) minimum pulse width,
(5) maximum pulse width, (6) number of control lines, and (7) the clock speed.
We measured the timing resolution, minimum delay, and minimum and maximum
pulse width with an Agilent Infiniium 54833D oscilloscope. These characteristics
varied according to the clock speed. We used a HP 8664A signal generator, and
produced frequencies varying from 100 to 200MHz. At 100MHz, the timing resolution
was 10 ns, and at 150MHz and 200MHz, the timing resolution was 8 ns. The minimum
delay between pulses was 10 ns (at 100MHz), and 8 ns (at 150MHz and 200MHz).
At 100MHz, the minimum pulse width was 10 ns, as shown in Figure 5-15, and the
maximum pulse width was 256 s.
2
0
>0
I
o
I
I
100
I
Time [ns]
I
200
Figure 5-15: At 100MHz, the minimum pulse width was 10 ns, which matched with
the predicted value.
We found that as the frequency increased to 200MHz, the timing resolution remained constant at 8 ns. This was unexpected, as we believed the timing resolution
would scale inversely with the clock speed. We also observed as the clock speed in110
creased, the rise time decreased and leveled off. At 100MHz, the pulse rise time was
0.5 ns, and from 150MHz to 200MHz the rise time was 2 ns. We attributed this
behavior to the capacitance of the system gates. As the clock speeds increased, the
capacitor at the gates could not discharge fast enough. Even though the manufacturer specified 300 MHz at the maximum clock speed, we found that we reached the
limits of the FPGA's clock speed at 200MHz. We summarize characteristics of the
pulse programmer, with a 100MHz system clock, in Table 5.8.
parameter
timing resolution
memory depth
number of control lines
minimum delay
minimum pulse width
maximum pulse width
system clock
10 ns
512 kBytes
72
10 ns
10 ns
256 s
100MHz
8 ns
512 kBytes
72
8 ns
8 ns
256 ns
150MHz-200MHz
Table 5.8: Characteristics for the second-generation pulse programmer. This table
shows the parameters for clock speeds of 100MHz and 150MHz.
Lessons learned
To achieve 8 to 10 ns pulse widths, the control of timing among the entities was
critical. In particular, the clock cycles for reading and writing from the memory was
taken into account by using parallel-to-serial converters.
We also found that the timing resolution was linearly dependent on the clock speed
up to 150MHz. After 150MHz, the timing resolution saturated. The limitations on
the timing resolution are unclear, but it is most likely related to the FPGA architecture, suggesting that future goal of reaching sub-ns pulse widths are not achievable
using conventional FPGA architectures. This opens the possibility of investigating
customized ICs for high-speed pulse programmers.
111
5.5
Summary
We explore software architectures to gain insight into developing general-purpose, lowcost pulse programmers. Two architectures are studied, and both are implemented
using low-cost programmable devices. The first architecture is designed to tackle the
issues of transparency, and portability. Focusing on these issues, we develop a lowcost, portable system using commercial hardware - a Rabbit RCM2200. The second
architecture is designed to increase the timing resolution. The goal for the second
iteration of the pulse programmer is met with 8 ns pulse widths. This is achieved
using parallel-to-serial converters in an VHDL implementation on a FPGA chipset.
We found that the as clock speed increases, the pulse width decreases but only up to
a maximum threshold.
The two design architectures have their strengths and weaknesses. The strengths
of the first system are its transparency and platform independence. But it lacks the
timing resolution for high-speed applications. The second design focuses on better
timing resolution for high-speed design. Our conclusion is that the strengths of the
two systems can be incorporated into a single design. We believe a future direction is
to merge these two design philosophies, using TCP/IP for communication and FPGA
devices for pulse sequencing.
112
Chapter 6
NQR Testbed
In order to verify the functionalities of the Class E amplifier (CEA) and pulse programmer (PP), as described in Chapters 4 and 5, we designed a nuclear quadrupole
resonance (NQR) spectrometer, which incorporates both devices. An NQR spectrometer is a suitable testbed for the devices because the spectrometer design of nuclear
magnetic resonance (NMR) is similar to that of nuclear quadrupole resonance (NQR),
as described in Section 6.1. Designing an NQR spectrometer is a challenging task,
involving the design of several components: the probe, pin diode switch, receiver, and
transmitter. In Sections 6.2, 6.3, and 6.4, we describe RF design methodologies for
each component and the challenges associated with their implementation. In addition
to designing and developing the NQR spectrometer, the NQR signals from two materials are detected as a verification of the spectrometer's operation. The two chemicals
are: (1) paradichlorobenzene (C6 H4 C12 ) and (2) sodium nitrite (NaNO 2 ). Section 6.5
describes the experimental data obtained from NQR spectroscopy on sodium nitrite.
The details about the physics of NQR are found in Appendix A.
113
6.1
NQR spectrometer
NQR was discovered [Deh50] and studied [Pou50] shortly after the discovery of NMR
in bulk media [BHP46, PTP46]. NQR has been used to study phase transitions of
materials [PB76] and their ferroelectric properties [SNFY58], and whereas, NMR has
gained a wide acceptance as an analytic tool in science, NQR has not gained the
acceptance or popularity.
NQR has many advantages over NMR. It has greater sensitivity to the environment because the resonance frequency is dependent on the electric field gradient
surrounding the nucleus. One of the most important advantages of NQR over NMR
is the absence of a large static magnetic field. This means a large superconducting
magnet is unnecessary for an NQR spectrometer. As a result, an NQR spectrometer
is cheaper to produce.
The general components of the NQR spectrometer we designed are shown in Figure
6-1. The components are very similar to an NMR spectrometer, except the magnet
and probe are replaced by a small, well-shielded copper encasing, which houses the
sample material. The spectrometer requires three main components: the transmitter,
probe, and receiver. The operation is as follows:
* A computer downloads a pulse sequence into the pulse programmer and generates a sequence of TTL level pulses.
" A RF signal at the nuclear resonance frequency is amplitude-modulated (mixed)
with the pulse signal, from the pulse programmer, forming RF pulses at the
resonance frequency.
" The RF pulses are directed into the power amplifier, which is connected in series
with a pin diode switch.
" The pin diode switch actively filters, or shunts, noise from the power amplifier
when the amplifier is not driven. When a high-voltage signal is applied to the
input of the pin diode switch, the output follows the input.
114
Transmitter
Pulse
Programmer
Frequency
Generator
A/D
Receiver
Power
Splitter
Power
Amp
RF Mixer
PreAmp
Power
Amplifier
L_______J
Figure 6-1: A block diagram of an NQR spectrometer, illustrating the three main
components: the transmitter, probe, and receiver. The sample material is placed in
the coil.
" In series with the pin diode switch is the impedance matching probe. The probe
has two functions. The circuit isolates the receiver from the transmitter and
matches the impedance to 50Q, maximizing power transfer to the coil. When
the sample material is excited by the RF pulse, an FID signal is induced. The
coil picks up the signal, which in turn is detected by the receiver.
" The FID signal is amplified by the receiver. Then it is detected, filtered, and
transmitted to the computer for analysis.
6.2
Impedance matching probe
The probe is a critical component of an NQR spectrometer because it houses the
sample and maximizes the transfer of RF energy into and out of the nuclei. In this
115
section, we examine the RF methodology used to design a probe and the mechanical
aspects involved in the implementation of our design.
Section 6.2.1 describes how to maximize the power transfer and
Here,
Q is
Q
of the probe.
defined as:
Q
(6.1)
fo
Af'
where fo is the center frequency and Af is the bandwidth.
To maximize power
transfer, the probe's impedance is matched to 50Q using an LC resonator with variable
capacitors.
In Section 6.2.2, we describe how to design a coil to hold the sample as well
as the mechanical requirements of the probe.
The probe and matching network
must be durably constructed. Components should be welded or epoxied with nonmagnetic materials to prevent acoustic ringing, which is a potential source of noise.
All components should also be well-shielded to prevent the system from coupling with
stray RF signals in the environment.
6.2.1
LC resonator as a probe
One design issue to consider is that the probe needs to couple energy into and out of
the quantum system at the resonance frequency. Therefore, it is important to consider high
Q
circuits, which transfers the greatest amount of energy at the resonance
frequency. Figure 6-2 shows a canonical LC resonator placed in series with a capacitor
and series back-to-back diodes. This passive circuit performs two functions:
" it separates the power amplifier from the pre-amplifier, and
" it maximizes the power transfer by matching the impedance to 50Q.
Back-to-back diodes
Back-to-back diodes are used to decouple the transmitter and receiver. The diodes
are assumed to have a dropout voltage of 0.6V. If the voltage across the back-toback diodes is greater than 0.6V, current is conducted through the diodes. On the
116
other hand, current is not conducted when the voltage is less than 0.6V. In the NQR
spectrometer, the pin diode switch bridges the back-to-back diodes to C1.
from pin diode switch
C1
to receiver
2
Li
probe
Figure 6-2: LC matching network to the probe. When the capacitors are tuned
properly, impedance is matched to a 50Q coaxial line and power transfer is maximized.
The operation of the circuit may be understood by considering two models: the
large-signal model and the small-signal model. In the case of the large-signal model,
both sets of back-to-back diodes are conducting because a high-power RF pulse is
being transmitted across the diodes.
Assuming the power transfer is maximized,
most of the power will be transferred to the coil. The reflected power from the coil
is shunted to ground by the second set of back-to-back diodes, thereby protecting
the receiver. In the small-signal model, there is no longer an RF pulse, and thus,
the back-to-back diodes are open circuits because the voltage is less than O.6V. The
transmitter is essentially separated from the receiver.
Impedance matching
Impedance matching is achieved using high
series with L-C
2
Q air
capacitors, where C1 is placed in
resonant circuit. Variable capacitors are used such that the circuit
can be tuned to match 50Q at a resonant frequency. C1 is known as the tuning
capacitor, and C2 is known as the matching capacitor. Although the value of the
capacitors are experimentally found, an analytic solution is used to help determine
the range of valid capacitance values.
To solve for the ideal values of the capacitors, the circuit is simplified as shown in
Figure 6-3. A 3Q wire resistance is assumed.
117
C1
tuning
capacitor
2
Li
probe
matching
capacitor
Rwire
Figure 6-3: Schematic of the matching network circuit used for analytic solution.
Rwire is the resistance of the wire. In the analysis Rwire = 3Q.
The Thevien resistance looking into the circuit is:
Z
=
(
jj
1
++.C1
+
(Rwire + iu L1
)
iWC2
lRWwireW - iC2L 1w 2 - iC1 L 1w 2(6.2)
C2W (-1 - IC1RwireW + CiLiW2 )
i - C 2 &i
In order to match impedance, the following conditions must be met:
o Re(Z(w)) = 50Q, and
* Im(Z(w))
=
0.
Assuming C2, L, and w are fixed and using Im(Z) = 0, C1 is solved for, giving:
C
C2R2
(Lw(1
-
W 2 + (1 2 - C2LIW2)2
C Liw ) - C Rir-W)
2
2
Table 6.1 shows the final values used for the probe based on Equation 6.3. The
Q is
measured using an HP 3560A network analyzer.
The tuning and matching capacitors are shown in Figure 6-4. The input is a 50Q
BNC coaxial cable. A die-cast box encases the capacitors and shields the system from
RF noise. The air capacitors are the Polyflon NRP series.
118
parameter
C1
C2
value
26pF
95pF
9.6tH
100
L,
Q
Table 6.1: The calculated values used for NQR spectrometer matching network. The
resonance frequency of the circuit is 4.64MHz.
Figure 6-4: The tuning and matching capacitors of the matching network. The
capacitors are enclosed in a metal RF box to shield the system from extraneous
noise.
6.2.2
Probe design
The tuning and matching capacitors are connected to the inductor, which acts as the
"pickup" coil. We consider two parameters in the design of the coil: SNR and Q. The
goal is to maximize both parameters. A large inductance as well as small resistive
losses are required to maximize the Q of the circuit. As shown in Figure 6-5, the
length, 1, of the coil is increased to achieve a large inductance; however, doing so also
increases the resistance. In most cases, it has been found empirically that building a
coil with the same length and diameter maximizes the SNR [Pet75].
The method of constructing such a coil is quite simple, but effective. First, a test
119
Figure 6-5: A single coil used in the probe of the NQR spectrometer, where 1 is the
length of the coil.
tube is wrapped with adhesive tape, sticky side out. Next, we lay a copper wire with
a thinner wire side-by-side. Both wires are wrapped around the test tube and over
the tape. The thinner wire acts as a spacer for the thicker wire. The thinner wire
is unwrapped from the test tube; the thicker wire remains adequately affixed to the
tape. Finally, non-conductive epoxy is used to firmly bond the coil to the tube.
In order to design the coil, it is analytically modeled. The coil design is based on
several equations. The inductance, L, can be calculated as follows:
L =
,
1 7
(6.4)
where 1 is the length, A is the coil area, N is the number of turns, and /-o is the
permittivity of free space. The field strength of the coil can also be calculated, given
in CGS units:
H, = 6 104
2NAw
(6.5)
where H1 is the field strength, e, is the peak voltage applied across the coil, and w is
the resonance frequency.
Furthermore, the power at the coil can be calculated from
H= 1OPQ) 2
VV V
where V is the coil volume, v is the frequency, and P is the power.
120
(6.6)
Several coils were made using Equation 6.4. Figure 6-6 shows an example coil
of such a coil. The coil has a diameter of 0.7 inches, a length of 0.7 inches, and an
inductance of 9.7pH with 32 turns. Figure 6-7 is a picture of the actual probe. The
top plate is a screw mountable cover, which allows one to easily replace the sample
coil. Appendix D includes the mechanical specifications of the probe.
Figure 6-6: An example of a coil made using the described technique. The inductance
of the coil is 9.7pLH and the number of turns, N, is 32.
121
-I
~ILLW
Figure 6-7: The probe encapsulating the test tube and the coil. The sample material
is placed in the test tube holder for NQR spectroscopy.
122
6.3
Pin diode switch
The pin diode switch (PDS) controls the conduction of the RF signal from the power
amplifier to the probe, serving to filter noise from the power amplifier. It is used to
switch on and off the transmission from the power amplifier to the probe. When we
attempt to detect the NQR signal from the probe, the noise from the power amplifier
needs to be filtered; otherwise, the signal cannot be observed. So the PDS is used to
"cutoff" the power amplifier from the probe.
The operation of the circuit can be thought of as follows: when the PDS is turned
off, the voltage across both diodes allows conduction to flow from the input (IN)
to the output (OUT). However, when the PDS is turned on, conduction across the
diodes (D 1 and D 2 ) ceases, and the path of the input current is shunted to ground
through L 1 .
The circuit is actively driven by a driver circuit, in which the input is between R1
and R 2 , as shown in Figure 6-8. A gated pulse ranging from +12V to -12V is used
to turn the PDS on and off. The driver circuit is an inverting operational amplifier
with rail-to-rail output. The signal is switched quickly, on the order of a few ps.
C1
D1
D2
C2
C3
IN
OUT
Li
L2
L3
L4
R2
R1
output from pin diode driver
Figure 6-8: The schematic of the pin diode switch.
Lessons learned
Originally, the FID data shown in Section 6.5 could not be detected using the NQR
123
spectrometer. The source of the problem was narrowed down to the PDS. During the
design of the PDS, we did not consider the resonance frequency of the notch filter,
which turns out to be a critical design issue.
Notice that L 4 and C 3 are connected to the coil and probe. When the circuit is
shut off, the diode blocks the small signal and essentially separates the transmitter
from the probe. However, L 4 and C 3 ,as seen in Figure 6-9, are not separated from
the tuning capacitors. These elements form a notch filter. The frequency of the notch
filter is
(6.7)
1notch-
v/L 3 C 4
C3
50I
Vin
Vout
L4I
Figure 6-9: Design consideration: a notch filter forms when the PDS is shut off. The
resonance frequency of the notch filter must be considered in the design of the system.
Utmost precaution is taken in selection of
Wnothc.
Otherwise, the gain may be
reduced significantly near, or at, the resonance frequency, making the FID signal
extremely difficult to detect. Thus,
Wnotch
is designed to be less than the resonance
frequency.
An example is given for the resonance frequency of 4.64MHz. As seen in Figure
6-10, if L3 = 1.8 [pH and C 4 = 10OOpF, then the resonance frequency is at 3.713MHz,
124
and the 3dB point is 4.7368MHz. Since the free precession frequency is 4.64MHz, the
gain is close to !. The FID signal cannot be observed due to attenuation. In order to
capture the FID signal,
Wnotch
is pushed down to 1.0887MHz and
w3dB
to 0.6532MHz
by changing L3 = 7.9/uH and C4 = 10nF. The gain is unity at 4.64MHz, hence, the
FID signal can be captured.
"*-[
I
Amplitude vs. Frequency
C1041 . O0
I
c=1 ooop 1
a~25 F
01"',
02
0
N
4.7368MHz
an6
3.766MHz
_0
~.s
freq4mncy (Hz)
.5
4
4A5
5
,x107
Figure 6-10: The Bode plot of a poorly designed pin diode switch. The resonance
frequency is at 4.73MHz which is very close to the resonance frequency of the matching
network. Thus, small signals are attenuated by 2.
A picture of the actual PDS with the driver is shown in Figure 6-11.
125
Figure 6-11: The transmission board containing: (1) RF mixers for producing gated
pulses, (2) a pin diode driver circuit, and (3) a pin diode switch.
126
6.4
Receiver
The last major component of the NQR spectrometer is the receiver. We receive
two types of receiver. Section 6.4.1 describes homodyne receiving, and section 6.4.2
describes heterodyne receiving.
6.4.1
Homodyne receiver
The FID signal from the nucleus is very small (on the order of -150 dBm). To detect
the signal, a series of low-noise amplifiers is used. The overall gain is measured to be
140dBm. Figure 6-12 shows the receiver chain of the spectrometer. The components
of the receiver chain correspond to the actual devices.
Oscope
[varfawe Gain
Amp(SRS)
Synthesizer
signal
I
Detector
SPower
PreAmp
IN
Figure 6-12: An example of a receiver chain is shown. A block diagram shown in this
figure corresponds to the real devices as seen on the right-hand side.
An oscilloscope captures the waveform and digitizes the signal.
The data are
transferred to the computer using the GPIB interface, and they are analyzed using
127
Matlab 6.0. The current setup that we have described is known as a homodyne setup.
6.4.2
Heterodyne receiver
The process of measuring both the ;- and y- components of the magnetization vector
can be accomplished by phase-shifting the receiver reference frequency. Figure 6-13
is a block diagram illustrating the detection scheme.
mixer
low pass filter
from
recv
amr
mixer
L9
(t)
OW Pass filter
local oscillator
Figure 6-13: A general schematic of a heterodyne receiver.
Suppose the incoming signal is described as
S(t) = A cos (wot),
(6.8)
and the local oscillator signal is described as
VLo(t) = B cos (wf t),
(6.9)
where A and B are the amplitudes and wo and wf are incoming frequency and local
oscillator frequency. A 90' phase shift is applied on VLo(t), producing VLO90*(t).
VLo(t) and S(t) are fed into one mixer, and VLo 900 (t) and S(t) are fed into a different
128
mixer. Since a mixer multiply the two signals, the outputs for two mixers are the
following:
S(t)VLo(t)
S(t)VLo
90
=
AB cos (wot) cos (wft)
=
-AB (cos ((wo + wf)t) + cos ((wo - wf)t))
1
2
(6.10)
AB cos (wot) sin (Wf t)
(t)
1
-
-AB (sin ((wo + wrf)t) - sin ((wo - wrf)t))
2
(6.11)
The phase difference of the local oscillator introduces an offset in the mixer such that
the second mixer corresponds to the
y-component
in the rotating frame. Filters are
used to remove the high frequency wo + wrf, leaving the frequency wO - Wrf, given
that wf is close to wo.
6.5
Experiment
In order to verify the correctness of both the pulse programmer and the Class E amplifier, pure NQR spectroscopy is performed on two different materials: paradichlorobenzene and sodium nitrite. The spectrometer must be configured to detect each material.
Configuring the system requires changing the pre-amplifier in the receiver stage, as
well as changing the PDS, the matching and tuning capacitors, and the probe's coil
according to the material's NQR resonance frequency. Once the spectrometer is set
up, we can search for the FID at the frequency of interest.
Paradichlorobenzene
A sample of paradichlorobenzene (C 6 H4 C1 2 ) is chosen to test the functionality of
the spectrometer. Paradichlorobenzene is widely used as a repellent in low-pressure
aerosols for insect control, and is the principal ingredient in commercial moth balls,
which are 99.9% pure. In fact, our test samples are prepared using commercial moth
balls. A test tube is first filled with crystalline pellets, and then the pellets are melted
using a handheld torch, resulting in a polycrystalline sample.
The resonance frequency of "C1 in paradichlorobenzene was found to be 34.56MHz.
129
The FID signal is shown in Figure 6-14.
0
-5i
-7
.
..
-
0.6
0.
1
12
14
16
1.6
time [ms]
Figure 6-14: The FID signal produced from "Cl in paradichlorobenzene.
Sodium nitrite
After the NQR spectrometer's operation was validated using paradichlorobenzene,
we turn our focus to examining sodium nitrite (NaNO 2 ). This material is studied
because of its various properties. In 1958, Sawada [SNFY58] discovered NaNO 2 's ferroelectric property using various spectroscopy techniques, including NQR. Since this
discovery, many temperature experiments have been conducted using pure NQR to
understand the nature of this material's phase transitions [OMB67, KOB70]. NaNO 2
contains
' 4 N,
which turns out to be a common atom found in various explosives. A
query of 10,000 materials containing
14
N shows that the NQR resonance frequencies
are virtually unique [BGJM94]. As a result, researchers have developed explosive detectors and remote sensing landmine detectors that identify materials based on their
NQR frequencies [GBM+01, GBYM93]. Since NaNO 2 contains
14
N, it is a wonderful
control material for calibrating NQR explosive detection devices. In our experiment,
we have reproduced pure NQR experiments on NaNO 2 at room temperature.
The NQR spectrometer was reconfigured to examine
130
14
N in NaNO 2. The ob-
served resonance frequency of
14
N is 4.64MHz. This corresponds to an asymmetry
parameter of 0.37 and a quadrupole coupling constant of 5.5MHz (see Appendix A for
definitions). These parameters fit well with theory and are confirmed by Petersen's
experiments [Pet75]. The FID signal of NaNO 2 is shown in Figure 6-15.
Figure 6-15: The FID signal of NaNO 2 captured on an oscilloscope.
A nutation experiment is performed in order to locate a 900 pulse width. The
pulse width is varied from 10ps to 500ps with steps of 10ps. The data points are
plotted in Figure 6-16. The signal amplitude is plotted in arbitrary units. According
to the discussion in Section A.5, the resultant waveform follows a Bessel function (J1 ).
A curve fitted to the Bessel function exhibits a close fit with the chi squared equal to
14.7 and 96% confidence bounds.
Although the results are promising, showing the data fit the theory, these may not
be correct. A sine fit also exhibits similar confidence bounds with a reduced chi square
of 14.1. Unfortunately, because of the lower reduced chi squared value associated with
the sine function; this means the sine curve is a better fit than the Bessel curve. The
correspondence is associated with RF inhomogeneity. As the time of the pulse width
increases, RF inhomogeneity causes undesirable transitions to occur, and thus the
data points above 400Ls begin to deviate from the ideal Bessel function, as seen in
Figure 6-15.
131
Calibration of 90 deg pulse width
data
10000
-
8000-
6000-
4000
E
20000-
-2000
-400050
100
150
200
250
300
350
400
450
500
pulse width (s)
Figure 6-16: The data points from a nutation experiment on NaNO 2
6.6
Summary
An NQR spectrometer was designed and constructed to test the pulse programmer
and the Class E amplifier by incorporating the two devices into the NQR spectrometer. There were three major components of the NQR spectrometer: (1) the transmitter, (2) the probe, and (3) the receiver. Both the pulse programmer and Class E
amplifier were part of the transmitter. The functionality of both devices were verified by performing simple spectroscopy on two materials: paradichlorobenzene and
sodium nitrite. The FID signals for both materials were detected; the resonance frequency for paradichlorobenzene was 34.56MHz, and for sodium nitrite, the resonance
frequency was 4.64MHz.
The pulse programmer and the Class E amplifier were proven to work in the NQR
spectrometer, meeting our goals. However, we found that NQR signal detection is a
challenging endeavor. In particular, the pin diode switch must be carefully designed
132
such that
Wnotch
is less than the material's resonance frequency. In addition, NQR in
materials is extremely sensitive to the surrounding environment. Thus, the sample
must be well-shielded from stray RF signals; otherwise the resonance frequency will
shift constantly.
There are many future uses for the NQR spectrometer. Since the NQR spectrometer can detect sodium nitrite, a control material used for explosives detection,
we can extend the future use of the spectrometer towards the study of materials for
explosives detection. Another possible use is for NQR quantum computing; however, that requires further modification of the hardware, most notably designing and
constructing a two-coil probe.
Nevertheless, the NQR spectrometer has validated the pulse programmer and
Class E amplifier.
It demonstrated the flexibility, transparency, and portable of
the pulse programmer. It also demonstrated good recovery time of the NQR signal through the use of Class E power amplifier.
133
134
Chapter 7
Conclusions
While the field of quantum computing is in its infancy, experimental realization of
NMR quantum computers has provided proof of implementation. The implementation
of NMR quantum computing experiments imposes stringent requirements for the
control of qubits. The control of qubits, or implementation of precise quantum gates,
can be reduce to control of RF pulses, which are generated by the pulse programmer
and amplified by the power amplifier.
I studied the requirements for both these
control devices, and I designed and implemented two pulse programmers and two
Class E amplifiers.
In this thesis, I focused on the digital implementation of low-cost pulse programmers and the design issues associated with NMR pulse programmers.
The pulse
programmer digitally controls an analog circuit and sets the amplitude, phase, and
duration of an RF pulse. Additionally, the pulse programmer requires sub-ns timing
resolution to produce complex shaped pulses. We implemented two pulse programmers using programmable logic devices.
The first pulse programmer is capable of
generating minimum pulse widths of 1 ps, while the other one is capable of generating minimum pulse widths of 8 ns.
The Class E amplifier is a low-cost alternative for NMR power amplifiers that is
well-suited for the needs of NMR quantum computers. It has a ringdown time faster
than a Class C amplifier, which is used in commercial NMR spectrometers. The fast
ringdown time contributes to a fast recovery time during measurement of an FID
135
signal, which often results in a higher SNR when compared to slower recovery times.
I designed two class E amplifiers, one at 34MHz and the other at 4.64MHz.
The pulse programmer and power amplifier are integrated into an NQR spectrometer to test the control of RF pulses with these devices. The NQR signals originating
from
14
N in sodium nitrite and from
3
1CI
in paradichlorobenzene are measured using
the NQR spectrometer as validation of the pulse programmer's and Class E amplifier's
functionalities.
7.1
Future Prospects: pulse programmer
As quantum computers emerge and mature, the demand for pulse programmers will
grow. Quantum computers rely on precise and accurate control of different physical
systems. For instance, superconducting quantum computers are proposing high-speed
pulse programmers capable of ns and sub-ns timing resolutions. Ion traps are also
calling for high-speed pulse programmers capable of complex pulse sequences to manipulate quantum systems.
The work done on the pulse programmer in this thesis has established a basis
for a new project, which proposes to design and implement pulse programmers for
superconducting Josephson-phase quantum computers. The design requirements for
the superconducting Josephson-phase quantum computer calls for complex, precise
pulse programmers capable of outputting 8 to 10 ns minimum pulse widths, and
scalable up to 100 RF output channels. Since these requirements are similar to NMR
quantum computers, many of the design issues discussed in Chapter 5 apply to this
system. The work on the pulse programmers can be extended to a third-generation
pulse programmer.
Currently, the hardware design of the third-generation pulse programmer is completed. Figure 7-1 is a block diagram describing the general components of this device.
Like the previous pulse programmers, a programmable logic device is the foundation
of the pulse programmer. However, in order to develop a general-purpose pulse programmer, we have decided to develop a customized PCB. The pulse programmer has
136
55 MBytes of static memory with a depth of 512 kbits and 82 bits of I/O lines. For
clock cycles of 8 ns, this corresponds to a data rate of 12 Gbps, which interestingly,
is competitive to commercial grade Ethernet controllers.
In addition, the programmer is designed to be configurable. First, the board can be
constructed to use ground isolated LVDS connections which reduces the overall noise
in the board, and in turn, may reduce the errors in quantum operations. Second, the
clock driving the programmable logic device can be configured in one of three ways:
(1) a crystal can be used as the oscillator, (2) the clock pin from the connector can
be used to route clock signal, or (3) one of two SMA connectors can be used to feed
a clock signal.
512Mbit
clock
5M
SRA
J08
en
as
bts
Complex
7
Programmable
r is es
Logic Device
(CPLD 400 pin
BGA
fl t
pq a
*
Figure 7-1: A block diagram of a pulse programmer designed for superconducting
Josephson-phase qubits.
Once a properly functioning pulse programmer is designed and implemented, de-
sign files will be made open available. This milestone will represent a broadly useful
technical contribution of this thesis work to the experimental quantum computing
community, spreading lessons learned from NMR implementation to improve control
of other physical systems.
137
138
Appendix A
NQR Theory
We present some basic background on nuclear quadrupole resonance (NQR) theory
for spin I = 1 systems.
A.1
NQR historical background
NQR was discovered [Deh50] and studied [Pou50] shortly after the discovery of NMR
in bulk media [BHP46, PTP46]. NQR has been used to study phase transitions of
materials [PB76] and their ferroelectric properties [SNFY58], and whereas, NMR has
gained a wide acceptance as an analytic tool in science, NQR has not gained the
acceptance or popularity.
NQR has many advantages over NMR. It has greater sensitivity to the environment because the resonance is dependent on the electric field gradient surrounding the
nucleus. One of the most important advantages of NQR over NMR is the absence of a
large static magnetic field. This means a large superconducting magnet is unnecessary
for a NQR spectrometer. So for materials with large quadrupole coupling constants,
NQR signal detection is appealing for industrial and commercial applications because
of lower costs and easier maintenance. NQR has found practical applications.
The detection of "N via pure NQR [BGJM94] has gained attention because many
explosives and narcotics contain
14
N. A query of 10,000 materials containing
14
N shows
the NQR resonance frequencies are virtually unique. As a result, researchers have
139
developed explosives detectors and remote sensing landmine detectors that identify
materials based on their NQR frequencies [GBM+01, GBYM93].
Recently, theoretical work by Furman shows one can use the nuclear quadrupole
moment for quantum computation [FGMS02I.
Using two RF fields with different
phases and orientations, the degeneracy of a spin 1=3/2 can be theoretically removed.
The fields form four nondegenerate basis states, which represents two qubits. An
additional RF field is required to manipulate the qubits.
A.2
Qualitative comparisons of NMR and NQR
In Chapter 3, we introduced NMR. NQR turns out to be quite similar to NMR in
many ways, but there are distinct differences between NMR and NQR. The energy
splittings in NMR are due to Zeeman interaction, whereas in NQR, the splittings
are mainly attributed to electrostatic interactions between the nuclear and electron
charge distributions. The energy levels are highly sensitive to slight changes in the
molecular structure of the system. We highlight the main differences between NMR
and NQR:
e NQR signals are not observed in liquids. The energy splittings in NQR are due
to nonspherical electron charge distributions that create electric field gradients
(EFG) around the nucleus. Within the time scale of NQR experiments, EFG
of liquids is averaged to zero due to molecular tumbling motion.
In solids,
the rapid, random tumbling motion is removed and characterized by a rigid
molecular lattice.
e In NMR, the orientation of the external static magnetic field and the RF field
determine the efficiency of the excitation.
In NQR, the relative orientation
of the RF field and the molecular crystal structure determine the efficiency of
the excitation.
Since different crystallites in a powder sample have different
molecular frame orientations, it is impossible to excite all the crystallites with
maximum efficiency. In other words, all nuclei do not see the same effective
140
EFG; thus, the signal efficiency is lowered.
" NQR resonance frequencies are highly dependent on the crystal structure and
molecular dynamics. Identical molecules with different packing environments
may cause shifts in frequencies between the different systems. Furthermore, if
the surrounding field gradient environment forms symmetries about the nucleus,
then the frequency is considerablely reduced, even in the presence of a large
quadrupole moment. Temperature also plays a role in the NQR frequencies.
Temperature changes lead to different vibrational modes, leading to shifts in
the resonance frequency.
" For a spin system with I < 1, there exists no quadrupole moment, and so,
there are no observable NQR effects. However, this should not be interpreted
as such nuclei having spherically symmetric charge distributions as we had initially thought. Nuclear physicists generally define an intrinsic quadrupole moment (Qo) with respect to a coordinate axis system fixed on the nucleus. The
quadrupole moment (Q) measured in experiments is a projection of Qo onto a
coordinate axis system that is independent of the motion of the nucleus such
as the lab frame. In general, Qo is nonzero for all nuclei for which the sum of
the nucleons does not match the "magic" numbers of the nuclear shell model.
Because Qo transforms as a second rank tensor and is thus symmetric under
parity transformations, at least three orthogonal directions must be defined for
the nuclear body axis to have different probabilities of orientation along the
directions. Thus, Q = 0 for I < 1 [Seg77, BM75].
A.3
NQR Hamiltonian and resonance frequencies
The NQR phenomenon is a second order effect that arises from the interaction between
the nuclear quadrupole moment (Q) and the EFG surrounding the nucleus. The
effective Hamiltonian is [DH58]:
141
e2 qQ
Ho=41(21
(
1)
(
-1)
(
)+7(Xl
2))
(A.1)
The choice of axes is such that the EFG tensor is diagonalized and JVxj < IVyyl <
IV;zl.
is called the asymmetry parameter and is defined as
|V27 | - |VYI
=z I
I
(A.2)
We note that 0 < 77 < 1.
For the case of the spin I = 1, the Hamiltonian in the jm)-basis is represented as
1
Ho =
0
r/
0 -2
0
0
1
rTI
(A.3)
with eigenvalues
E1,2,3 = 1 +
(A.4)
,, -2, 1 -,
and corresponding eigenstates
1
v/2
)0
()
1
0
,12)
=
,|3) =
0
(A.5)
0
Equation (A.3) can be rewritten in its quadrupole basis by a basis transformation:
HOQ=
0
0
0
0
Ex
0
-2
01
0
E
01
0
0
1+17
0
0
Ez
The eigenbasis is then labeled by the Cartesian basis states:
142
(A.6)
1)
Ix)=
0
1z)
y) =
0
0)
0
(A.7)
Sometimes this frame of reference is referred to as the principle axis system (PAS)
[Lee02].
A.4
Pure NQR selection rules
We have established NMR obeys the familiar selection rules Am = ±1. In pure NQR,
the selection rules differ from NMR. There are three energy levels Ex,,,2 that result
in three possible frequency transitions:
WX
= Ez - Ey = 3+7,
Wy
=
E-Ex
Wz
=
Ex - Ez = -2
=-(3-1),
and
(A.8)
The selection rules for wx is Am = ±1, w, is Am = t1, and wz is Am = 0, ±2. At first
glance, this seems to violate well-known selection rules, established in NMR, where
Am = +1.
But the selection rules are not in violation. Upon closer examination, we
find the interaction of the 2nd order (quadrupole) electric nuclear wavefunction with
the electric field gradient leads to a way of establishing the selection rules through
spherical harmonic equations. The electrostatic potential energy of a nucleus of finite
dimensions in the field of surrounding electrons is given classically by the expression:
WE
JJ
WE
Te
l Pe(re)Pn(rn)dTedTn
Ir-(A.9)
ire - rni
Tn
where p, is the nuclear charge density, pe is the electron charge density, re is distance
of the electric field from the origin, and r, is the distance of the nucleus from the
143
origin. Equation (A.9) can be rewritten in terms of spherically harmonic equations
as
(A.10)
N"-E-",
WE
=
Nlm
=
247+
Ek-+
=
24+
I pn(rnirYnm(On,
n))drn, and
1prrY -"(Oe, #e))dTe,
(A.11)
(A.12)
where Y"(Oe, 0e) is the angular equation. If the state of the nucleus is described by
the wave function TI(R
1
, R 2 , ... RA), then Njn is given by the expectation value of the
Hamiltonian operator over the nuclear wave function described by
X17 =
p r' Y" (Oj, #0).
+1,,)
21+1j
(A. 13)
Similarly the expectation value of the operator over the electronic wave function is
-
=
24+
(11) Yv-(6k,#k).
r)r
(A.14)
Since the operators transform in the same way as the spherical harmonics, they are
called tensor operatorsof order 1. The expectation values of the operator N[" is known
as the nuclear multipole moment.
General dipole selection rules
Applying the operator
NGIX, we examine the allowable transitions for the dipole mo-
ment by calculating
(<DIf IMl
<D)
oc (n, 1, m fY' (0,
144
#)1n', l', m');.
(A.15)
After substituting in 1 = 1 and m = 0, (A.15) yields
(n, , mf1YI'(0,
r 3Rf (r) Ri (r)dr
#)
In', 1', M')i =
27r
+1
exp (i(mf - mj)#)d#,
(x)P"(x)d
xP,"
(A.16)
0
0
where x = cos 0. For Equation (A.16) to be nonzero, the following condition must be
27r
satisfied m 1 = mi (Am = 0) because f exp (i(mj - mj)O)d
=
Omf,mi
0
The following recursion relationship for Legrende polynomials
XFP1 (x) = 211
((1
-
|m|)P+(x) + (1 + Im)P"'irn(x))
(A.17)
shows that Al = ±1 because
+1
12
1 ((1
-1
-
jmf|)P+1 (x) + (1 + Imi)Pi'_"'(x)) P,,m(x)dx = 61,1
(A. 18)
when ' = 1 ± 1.
Similarly, the same argument applies for 1 = 1 and m = t1. For (A.15) to be
nonzero, Am = +1. Thus, the selection rules are Al = ±1 and Am = 0, ±1.
Quadrupole
moment selection rules
It is well established experimentally that nuclear wave functions are either even or odd
with respect to inversion. Since R(r)j is an even function, the expectation value will
be the integral of an odd or even function as Ym is odd or even. Since integrals of odd
functions are zero, only the even multipole terms of A/j" will survive. This means the
nuclear electrostatic dipole moment does not occur, ruling out the established dipole
selection rules. Thus, the first term of interest is the quadrupole moment (1 = 2).
We determine the selection rules by examining the allowable frequencies. Using
Equation A.15 with 1=2, we find that the equation is proportional to:
Oc
c
f(3x2
-
1)Plmf(x)PF"(x)dx
f(Pm-f(x) + Pi+f (x))(P177 1 (x) + P";1 (x)) - P m (x)Pj""(x)dx
145
(A.19)
(A.20)
So Al = 0, ±2 must hold true for the integral to have a nonzero result.
m ={0, 1,2, ... }, Equation (A.15) yields Am = 0, ±1,
selection rules are Al
A.5
=
0 and A
=
2.
For
Thus, the quadrupole
0, ±1, ±2.
RF excitation and effective signal averaging
The picture of NQR excitation can be seen as a 3-D extension of the excitation
process in spin-1/2 NMR. Because the spin-1 systems transforms as three-component
vector in 3 space, i.e. PAS frame, the classical notion of precession still applies. For
example, a RF field apply along the
ly).
Iz) basis
drives the transitions between
Ix)
and
This is analogous to precession about the 2-axis. Since we consider the PAS
frame, the relative orientation of the applied frequency determines the efficiency of
the excitation. As a direct consequence, NQR in crystallites cannot be maximally
excited in a powder crystalline samples.
The expected signal can be theoretically calculated using density matrices. For
high temperature, the thermal density matrix is approximated by
Pe = exp
(A.21)
I - -HQ
kT
kT
Since identity does not change under time evolution, this term can be ignored. Also,
-1 is constant factor that is dropped. Thus, Equation A.21 can be simplified to the
approximation:
po = HQ
(A.22)
In the spin 1=1 case, the density matrix is
1 - /
0
0
0
-2
0
0
0
1 +r
po =H As
(A.23)
in the quadrupole (PAS) basis. The rotating frame (interaction picture) is calculated
146
using the equation:
(A.24)
pro(t) = U(t)HTOUt(t)
where U(t)
=
Under an RF pulse, the total Hamiltonian, in the
exp(iHASst).
The RF field is linearly polarized on the
quadrupole basis, is HTOT = Ho + H.
sample due to relative orientation axis rather than circularly polarized electromagnetic field in NMR. So, the rf field cannot be decomposed into two components. An
RF field apply on a disoriented solid, in the i-axis, corresponds to
H3
w cos
(3 + 71)wt)(cos 6)IfAS,
where 0 is the angle between the excitation axis and the PAS
(A.25)
-
plane.
In the
rotating frame, the matrix for spin 1=1 is
0
rot
=
PTOT =
1coso
0
cos0
0
0
0
0
0
.
(A26
(A.26)
In Equation A.26, the fast oscillating terms go to zero. Under time evolution, the
Hamiltonian becomes
p(t) = U(t)HPAsUt(t)
(A.27)
where U(t) = exp(iHprott). The read out of the signal is measured in one axis, so the
trace of the Hamiltonian along the axis of measurement is
1.
Tr(p(t)A) = -(3 + q)w sin (
3
w(3 + )
3
t) sin (tw cos )
(A.28)
where the measurement operator A = I:AS.
The signal is dependent on the relative orientation of the excitation field, and for
crystal powders the signal cannot be maximized. Averaging the signal turns out to
be
f sin (t cos 0) sinOd9 = J(2tw).
147
(A.29)
We notice that the averaged signal does not follow a sinusoidal function as in NMR,
but rather the Bessel's function as shown in Figure A-1. The maximum signal intensity arises when wt = 1190 or 0.667r. This corresponds to a 90' pulse in NMR. Hence
the operation is known as a I pulse. In practice, the maximum signal obtainable
from the nuclei is 48% when compare to a signal crystal sample. In a single crystal,
the expected averaged signal is expected to follow a sinusoidal function.
0.667E
1
i
1.887t
Figure A-1: A bessels function is the average FID signal induced in NQR experiments.
A "7r/2" pulse is produced when wt is 0.667r. The amplitude is normalized in this
example.
A.6
Summary
In this appendix, we have introduced NQR theory for spin-1 systems and have highlighted the differences between NMR and NQR. Spin-1 NQR is similar to NMR in
many ways. The spin-1/2 precession applies to NQR, but with several key differences:
* NQR is not observed in liquids, but often in crystallites and power samples with
spin > 1/2.
" The interaction between the electric nuclear wavefunction and the electric field
orientation yields selection rules Am = 0, i, ±2. In spin-1 systems this results
148
in all possible transitions in the PAS frame.
* The resonance frequency is sensitive to the crystal structure and the packing
environment around the nuclei. Temperature also plays a role in the resonance
frequency, shifting it accordingly.
" Random orientations in the sample and different effective EFG in crystal powders reduces the maximum signal intensity is 48% when compared to a single
crystal. As a result, detection of a FID in NQR is more difficult in comparison
to NMR.
Despite these differences, the isolated two-level spin dynamics under signal resonance
frequency excitation in NMR has the similar relations to NQR. So methods introduced
in NMR (such as spin echo pulse sequences, composite pulses, shaped pulses, and
adiabatic pulses) may be applied in a similar fashion to NMR.
149
150
Appendix B
Appendix A: First Generation
Code
This appendix includes the Protel schematics and layout for the daughter used the
first generation of pulse programmers. Also included is the rabbit core code, written
in C. Several examples of Matlab code for controlling the pulse programmer are
included.
Some of the features of the rabbit pulse programmer include
e TCP/IP connection
* A webserver which allows the user to control the pulse programmer
o Ability to control the pulse programmer through matlab via cgi-style post methods
o TTL pulse as output (upto 4 channels)
o Pulse sequence compiler built in the chip
o 338ns pulse resolution
151
I
I
I
Figure B-1: Overview of the entire schematic for the first generation pulse programmer. The next 4 sections show full size schematic diagrams of the daugther board.
The sections start from left to right and move from top to bottom.
152
3
y
CL
4.
D
10
l
POW IN
SI
3
4
2 VM3
-42QCT.5.0
C1
1
AP
13 B~ll /
Al:l
151
21
21
237
FUSE
2
AAt
31
rcerca
23
Pi
SM
,G
UI
40PIN0
PU
E
L,4L
S2
I
J27
A
Figure B-2: The top left corner schematic of the rabbit daugther
153
I1I I'I I(7
7-fo~
11
q
2
R
US-KnVOU-IONN
LED
F)l
J6
LED
LFJ)
PAD
w
r
4' -;
1
.9
IMADM 4X2
Figure B-3: The top right corner schematic of the rabbit daugther board
154
L3
I
9
13 ;
Mo
GD
-I
19
191
A2
17
B
na
e
-l
31
s
32
SMMFI
34
35
s
sAes
37
640
o
-MOE,
1~
~
-j. 34
s1
oo
eoD
vc
GD
u
DAMTE 10
DAUXl 11
-
35
37
39
DAI
OAT
31
.
LOAD_
40PIN
R2
IK
4OPIN4
A
/
I
2
3
Figure B-4: The bottom left corner schematic of the rabbit daugther board
155
3
4
SIO
AG
0
DACLL
6DB
Dr
11
CowAN
AI
20
TICDv2%
0
.
99COAXCON
27
WA C
A
62
6IK
6= 6)
6
Ra
SI
SIG
13
8
Ra-
5
4
6
Figure B-5: The bottom right corner schematic of the rabbit daugther board
156
B.1
Source code
Author: Wei-Han Huang
Date: SEPT-01
Abstract: Pulse program code for the rabbit 2000
Offers webpage that serves as a controllerfor the rabbit
2000 board
Date: JUNE-02
Additions: Added code that reads cgi-style function calls
to the rabbit board
for example: "192.168.1.81\enterA.cgi
\variable1=valuel&variable2=value2"
current cgi commands that are available:
command: runOnce
example: runOnce.cgi ?prep=2&pw=40&recover=4&ack=2
abstract: the capturefunction sends rabbit the pulse width
and number of samples to be taken
the pulse width is in (micro-seconds, le-6)
prep time is in (see)
-> time between the pulse
pw time is in (us)
-> time of pulse width
recover time is in (us) -> time between the end of pulse
and the beginning of acquisition pulse
ack time is in (msec)
-> duraction of the acqusistion
pulse
repetitions
-> number of repetitions
(default case is to run forever)
if you just set the pulse width, the other values
(parameters will default to prep = 2 (Sec),
recover time = 5 (u-sec), ack = 2 (m-sec)
the purpose of this function is to run it with matlab,
where matlab tells it to run once, while it captures
the data.
we can then automate the code to capture data accordingly
Output ports for the rabbit board are the following:
port cO -> acquisition pulse
port c2 -> hpulse
port c4 -> acquisition pulse
command: runPulseSeq
example: runPulseSeq.cgireps=-1&code=C0C2C0C300
abstact: attempts to run pulse sequence for n repetitions
code -> the pulse sequence code "COC1. . ."
nsamp -> number of repetitions
#define MYIPADDRESS
#define MY-NETMASK
192.168.1.81"
"255.255.255.0"
*define REDIRECTTO "http://192.168.1.81"
#define MAX-INSTRUCTIONS 100
#define OPCODE1 0x0A
*define OPCODE2 0x40
#define OPCODE3 0x11
*define OPCODE4 0x12
*define OPCODE5 0x13
#define OPCODE6 0x14
//#define
//#define
DEBUG
-DEBUG-
#memmap xmem
*use "dcrtcp.lib"
*use "http.lib"
#ximport "E:\NQR\test2.html" indexhtml
#define MAX-FORMSIZE255
*define NUMFIELDINPUTS 19
typedef struct {
char *name;
char value[MAXFORMSIZE];
} FORMType;
FORMType FORMSpec[NUM-FIELD-INPUTS];
int
mainState;
157
States in the state machine
1-> http handler
2->run pulse
3->RunHpulseProgramwith TPrep in m-secs, Acq Time in m-sec
4->RunHpulseProgramwith TPrep in secs, Acq Time in rn-sec
5->RunHpulseProgramwith TPrep in m-sees, Acq Time in sec
6->RunHpulseProgramwith TPrep in secs, Acq Time in sec
7->RunOnce (RunHpulseProgramOnce!) Tprep in (secs),
and acq time in (rmsec)
8-> RunPulseProgram:run a pulse sequence program
int PortA;
PortB;
PortC;
PortD;
int
int
int
int
Freq;
int
TPrep;
THPulse;
int TRecover;
int TAck;
int TReps;
int
int num-ops;
static char ops [MAXINSTRUCTIONS];
static char code [MAXINSTRUCTIONS];
char last -error[255];
int
int
int
int
int
int
int
enterA
enterB
enterC
enterD
enterFreq
enter.pp
runHPulse
(HttpState * state);
(HttpState * state);
(HttpState * state);
(HttpState * state);
(HttpState * state);
(HttpState * state);
(HttpState * state);
/*test code +/
void test-repeat(int repetitions);
/* GET METHOD COMMANDS a/
int runOnce
(HttpState * state);
(HttpState * state);
int runPulseSeq
/* PARSING FUNCTIONS */
int ParseCommand(char * string);
int CompilePulseCode(char * program);
void RunPulseProgram(;
void RunPulseProgram2(int treps);
void initialize.parser ();
int
int
ASCII.to-Int
hex-to-int
(char * string);
(char c);
(char count);
void RunPulse
void initialize-ports 0;
// initialize
int
parsepost(HttpState* state);
void parse-token(HttpState* state);
const HttpType http-types[] ={
{ ".html", "text/html", NULL},
{ ".gif", "image/gif", NULL},
{ ".cgi", "", NULL }
1;
const HttpSpec http-flashspec[] = {
{HTTPSPEC-FILE, "/", index.html, NULL, 0, NULL, NULL},
{HTTPSPEC-FILE, "/index.html", index-html, NULL, 0, NULL, NULL},
{HTTPSPECSFUNCTION, "/enterA.cgi", 0, enterA, 0, NULL, NULL},
{HTTPSPEC-FUNCTION, "/enterB.cgi", 0, enterB, 0, NULL, NULL},
{HTTPSPEC-FUNCTION, "/enterC.cgi", 0, enterC, 0, NULL, NULL},
{HTTPSPECSFUNCTION, "/enterD.cgi", 0, enterD, 0, NULL, NULL},
{HTTPSPEC-FUNCTION, "/enterFreq.cgi", 0, enterFreq, 0, NULL, NULL},
{HTTPSPECSFUNCTION, "/enterpp.cgi", 0, enternpp, 0, NULL, NULL},
{HTTPSPECFUNCTION, "/runHPulse.cgi", 0, runHPulse, 0, NULL, NULL},
{HTTPSPEC-FUNCTION, "/runnce.cgi", 0, runOnce, 0, NULL, NULL},
{HTTPSPEC.FUNCTION, "/rnPulseSeq.cgi", 0, runPulseSeq, 0, NULL, NULL}
1;
int
{
hex-to-int(char hex)
// just
switch
{
case
case
a quick table
(hex)
'0':
'1':
158
case '2':
case '3':
case '4':
case '5':
case '6':
case '7':
case '8':
case '9':
return
case 'A':
return
case 'B':
return
case 'C':
return
case 'D':
return
case 'E':
return
case 'F':
return
}
return -1;
int
(hex -
x30);
10;
11;
12;
13;
14;
15;
runHPulse (HttpState * state)
const char sec[] = "sec";
const char msec[] = "ms";
if(parse.post(state))
TPrep = ASCII.to-Int(FORMSpec[6].value);
THPulse = ASCII1to-Int(FORMSpec[7].value);
TRecover = ASCII-to-Int(FORMSpec[8].value);
TAck = ASCII-to-Int(FORMSpec[9.value);
TReps = ASCII-to-Int(FORMSpec[12].value);
// returns -1 if it is a string,
//default automatically to infinite loop
if (strcmp(msec, FORMSpec[10].value) == 0
&& strcmp(msec, FORMSpec[11].value) == 0)
mainState = 3;
else if (strcmp(sec, FORMSpec[10].value) == 0
&& strcmp(msec, FORMSpec[11].value) ==0)
mainState = 4;
else if (strcmp(msec, FORMSpec[10].value) == 0
&& strcmp(sec, FORMSpec[11].value) == 0 )
mainState =5;
else if (strcmp(sec, FORMSpec[10].value) == 0
&& strcmp(sec, FORMSpec[11].value)== 0 )
mainState = 6;
}
cgi-redirectto(state, REDIRECTTO);
return 0;
}
set the pulse width, prep time, acquisition time, and the
recover time and run it once, and then stop
the assumption is that prep is in (sec) and ack is in (m-sec)
if you just set the pulse width, the other values
(parameters will default to prep = 2 (Sec), recover
time = 5 (u-sec), ack = 2 (m-sec)
int runOnce (HttpState * state)
int pulse-width, acquisition, recover, prep-time, reps;
if(parse-post(state))
pulse-width = ASCII-toInt(FORMSpec[13].value);
acquisition = ASCII-toInt(FORMSpec[14].value);
recover = ASCII.to.Int(FORMSpec[15].value);
prep-time = ASCII-to-Int(FORMSpec[16].value);
printf("string - %s\n", FORMSpec[17].value);
reps
= ASCI Ito-Int(FORMSpec[17].value);
mainState = 7;
// error checking
if (pulse-width > 255)
pulse-width = 255;
else if (pulse-width <=0)
pulse-width = 5;
if (acquisition > 255)
acquisition = 255;
else if (acquisition <= 0)
159
acquisition = 2;
if (recover > 255)
recover = 255;
else if (recover <= 0)
recover = 5;
if (prep-time > 255)
prep-time = 255;
else if (prep-time <= 0)
prep-time = 2;
if (reps > 255)
reps = -1;
// run forever
//(note that if reps is negative it will run forever)
TPrep = prep-time;
THPulse = pulse-width;
TRecover = recover;
TAck = acquisition;
printf("reps - d\n", reps);
TReps = reps;
}
cgi-redirectto(state, REDIRECTTO);
return 0;
}
Run a pulse sequence code given the parameters
passed to the rabbit chip. If there is an error
in the pulse sequence the compiler will catch it
and return the error to the user and will
not run the pulse sequence
int
runPulseSeq (HttpState * state)
int
reps;
char * program;
if(parse.post(state))
{
reps
= ASCII1toInt(FORMSpec[17].value);
program = FORMSpec[18].value;
initialize-parserO;
if (CompilePulseCode(program) == 1)
mainState = 8;
// error checking
if (reps > 255)
reps = -1;
// run forever
//(note that if reps is negative it will run forever)
if (reps == 0)
reps = -1;
TReps = reps;
cgi-redirectto(state, REDIRECTTO);
return 0;
}
else
{
mainState = 1;
printf("syntax error!\n");
}
}
cgi-redirectto(state, REDIRECTTO);
return 0;
}
int
enter-pp (HttpState * state)
int i;
#ifdef DEBUG
printf("enter pulse program\n");
#endif
if(parse-.post(state))
I
initialize-parser();
#ifdef DEBUG
printf("Program Entry: %s\n". FORMSpec[5].value);
#endif
if (CompilePulseCode(FORMSpec[5].value) == -1)
#ifdef DEBUG
160
printf("Last Error: %s", last-error);
else
{
printf("command
value\n");
for (i = 0; i < num-ops; i++)
printf("Xd
ld\n", ops[i], code[i]);
}
#else
#endif
I
cgi-redirectto(state, REDIRECTTO);
return 0;
int enterA (HttpState * state)
{
if(parse-post(state)) {
#ifdef DEBUG
printf("Port A out\n");
#endif
PortA = ASCII-to-Int(FORMSpec[0].value);
if (PortA >= 0)
{
#ifdef DEBUG
printf("Value:
#endif
%d\n", PortA);
tasm
push af
Id a, (PortA)
ioi Id (PADR), a
pop af
#endasm
I
//state->length = strlen(state-> buffer);
//state->substate++;
}
cgi-redirectto(state, REDIRECTTO);
return 0;
int
enterB (HttpState * state)
{
#ifdef DEBUG
printf("Port B
#endif
out\n");
if(parse-post(state)) {
PortB = ASCII.to.Int(FORMSpec[].value);
if (PortB >= 0)
{
*asm
push af
Id a, (PortB)
ioi Id (PBDR), a
pop af
#endasm
}
//state->length = strlen(state->buffer);
//state->substate++;
}
cgi-redirectto(state, REDIRECTTO);
return 0;
}
int
{
enterC (HttpState * state)
#ifdef DEBUG
printf("Port C out\n");
tendif
if(parse..post(state)) {
PortC = ASCII-to-Int(FORMSpec[2].value);
if (PortC
{
>=
0)
*asm
push af
ld a, (PortC)
ioi Id (PCDR), a
pop af
*endasm
}
161
//state->ength = strlen(state->buffer);
//state->subst ate++;
}
cgi-redirectto(state, REDIRECTTO);
return 0;
}
int
enterD (HttpState
state)
{
#ifdef DEBUG
printf("Port D out\n");
#endif
if(parse.post(state)) {
PortD = ASCIL1to-Int(FORMSpec[3].value);
if (PortD >= 0)
{
#asm
push af
Id a, (PortD)
ioi ld (PDDR), a
pop af
Sendasm
I
//state->length = strlen(state->buffer);
/ /state->substate++;
}
cgi-redirectto(state, REDIRECTTO);
return 0;
}
int
{
enterFreq (HttpState * state)
if(parse-post(state)) {
Freq = ASCI Ito-Int(FORMSpec[4].value);
if (Freq > 0)
mainState = 2;
//state->ength = strlen(state->buffer);
//state->substate++;
}
cgi-redirectto(state, REDIRECTTO);
return 0;
}
//
//
//
//
asssume it is null terminate and the value of the
char are ints (if not return -1)
also assume value of string is positive so,
mainly b/c there's no negative outputs that we are having
int ASCII.toInt(char * string)
{
int
i;
char cVal;
int rval;
// error checks
if (string -- 0)
return -1;
if (string[0] -return -1;
'-')
i - 0;
rval - 0;
cVal - string[i];
while ( cVal !- 0
{
if (cVal < 0x30 I I cVal >
return -1;
rval - (cVal -
Ox30)
Ox39)
// error!
+ 10 * rval;
cVal - string(++i];
}
return rval;
}
int
check-tokens(char c)
{
if (c-- I
return 1;
return -1;
c -- \n' I
c -- 0
c-- '\r')
162
check-validhex(char c)
int
{
if (c >return
if (c >return
'a'
I Ic
'f')
<-
1;
I c <-
'A '
'F')
1;
if (c >- '0'
return 1;
II
c
<-
'9')
return 0;
}
void RunPulseProgram2(int treps)
{
static int reps;
reps - treps;
#asm
// disable interrupts
ipset 3
push af// save the registers
push bc
push de
push hl
// disable watchdog
ld a, 0x51
ioi Id (WDTTR), a
disable the watch dog timer
ld a, Ox54
ioi ld (WDTTR),
ld a, OxOO//
ioi
ld
init
a
port c
(PCFR), a
// put the rep information into register a
//and save it on the stack
ld a, (reps)
ld c, a
BEGIN:
// b->num ops
// c->reps
// de->ops
// hl->code
//
cp a, OxO0
// if a is < 0 then don't dec it, just keep it so that
// we are in an infinite loop
jp m, CMP-A // a is a minus sign
dec c
CMP-A:
// point to the beginning of op code array
Id de, ops
Id hl, code
push bc
Id a, (hl)
POINTA:
// access array and figure out what op code to run
Id a, (de)
cp a, OxOA
jr Z, SHORTDELAY
cp a, Ox14
jr Z, NOOP
cp a, Ox12
jr Z, TURN-C
cp a, Ox13
jr Z, TURN-B
cp a, Ox1O
jr Z, MID-DELAY
cp a, Oxl
jr Z, LONG-DELAY
cp a, OxOO ; reached end of the pulse program
jr Z, CHECK
POINTD:
// compare num-ops to 0
pop de
inc hl // move to the next instuction
inc de
jr POINT-A
CHECK:
// get reps and determine whether to run again
// check if a == 0, if so then return,
// otherwise dec a, and jp to BEGIN
// pop de
163
//
pop hl
pop bc
Id a, c
cp a, OxOO; compare a with OxQO
jr Z, RETURN
jr BEGIN // loop forever
NOOP:
inc hl
inc de
jr POINTA
SHORTDELAY:
Id b, (hl)
// code that delays by 1 us (2 loops total,
// 1 loop for 1 u-sec)
delay-usec-:
Id c, b; load code[i]
ld a, OxGO
provides a 2-cycle delay
inc a
which makes everything delay by exact 1
usec (ain't this code crazy)
ld b, a
loop-usec_:
; delay by 1 u-sec
djnz loop-usec_
ld b, c
; delay by (variable)* usec -djnz delay-usec
;up to this point the delay is lusec
inc hl
inc de
jr POINTA; go to next instruction
MID-DELAY:
// push hl
push de
ld b, (hl)
// ld b,a
delay-msec_:
// code the delays by (variable) *
ld d, b
ld a, OxOA
ld b, a// b - 10
loop-msec_:
ld c, b// c - 10
Id a, OxFF
ld b, a// b - FF
1msec
msecA_:
djnz msecA_
ld a, OxA6
ld
b, a// b - A5
msecB_:
djnz msecB_
ld b, c// b - 10
djnz loop-msec//
ld b, d
delay by 1
msec
djnz delayamsec// delay (variable) *
jr POINTD// next instruction
msec
LONGDELAY:
// push hl
push de
ld b, (hl)
// ld b, a
// code the delay by 1 sec
delay-sec_:
ld e, b; e - counter
ld a, OxFF
ld b, a
loop.secC_:
ld d, b; d - 255
ld a, Ox78
ld b, a
loop-secB_:
ld c, b; c - 120
ld a, Ox8B
ld b, a; b - 139
loop-secA_:
djnz loop-secA_
ld b, c
djnz loop-secB_
Id b, d
djnz loop-secC_; delay by I sec
id b, e
djnz delay-sec_; delay by variable a 1 sec
jr POINTD// next instruction
TURNC:
// turn on or off port c depending on
ld a, (hl)
mio ld (PCDR), a
inc hl
164
inc de
jp POINT'A
TURNB:
Id a, (hl)
ioi ld (PBDR),
inc hl
inc de
jp POINTLA
a
RETURN:
ipres
// set interrupts back to normal
// re-enable the watchdog timer
ld a, Ox51
ld (WDTrR), a
pop
pop
pop
pop
hl
de
bc
af
#endasm
printf ("Returning from pulse program");
return;
}
void RunPulseProgram()
{
#ifdef DEBUG
int i;
// read in the op code and then run it
// loop around like this
if (TReps -- -1)
printf("Runs forever\n");
else
printf("Runs %d times\n", TReps);
for (i - 0; i
<
numops; i++)
{
switch (ops[i])
case OPCODEl:
// jump to some place in code (assembly and run the code)
printf("short delay for %d usec\n". code[i]);
break;
case OPCODE2:
printfC"med delay for 7d msec\n", code~i]);
break;
case OPCODE3:
printf("long delay for %d sec\n", code(i]);
break;
case OPCODE4:
printf ("turn port C to %d\n", code[i]);
break;
case OPCODE5:
printf("turn port B to Xd\n", code[il);
break;
case OPCODE6:
printf ("no operation\n");
break;
}
}
#endif
}
int
ParseCommand(char * string)
{
char c;
int i;
int num;
if (string
--
0)
strcpy(last.error, "empty string\n\0");
return -1;
}
c - string[D];
if (c <'0' I i c
>
'9')
{
strcpy(last-error, "unexpected token:
got a letter instead of a number \n\D");
#ifdef DEBUG
printf("parse command error expecting
a command between 0 and 9, but
got the letter %c\n\D", c);
printf("The next letter is %c\n\D", string[l));
Rendif
165
return -1;
ops[num-ops] - c - 0x30;
switch (ops(num-ops))
{
case 0:
case 1:
case 2:
// short delay: expect one byte (0-255) micro-sec (I byte)
// mid length delay: (0-255 msec)
long delay: delay is in secs
//
if (opsnum-ops) -- 0)
ops(num-ops) - OPCODE1;
else if (ops[num-ops] -- 1)
ops~numops] - OPCODE2;
else
ops(num-ops) - OPCODE3;
code[num-ops]
i
-
c
-
num
-
0;
1;
string[i]
- 0;
do
{
if (check-tokens(c)---l)
{
if (c < '0' II c > '9')
{
#ifdef DEBUG
printf("Error: expected number but got Xc", c);
#endif
return -1;
I
num - hex-to.int(c)
#ifdef DEBUG
printf("Xc\n", c);
+
10*num;
#endif
}
}
c - string[++i];
while ( (c >- '0') && (c <-'9') 1I
(c -- ' II c -- '\n' II c --'\r')
);
// convert the units (in u-sec) to count u
// nits and see what happens
code[num.ops] - num;
numops++;
return i;
break;
case 3:
case 4:
// set port b 1 byte data value
i - 1;
c - string[il;
num - 0;
do
{
if (checktokens(c)---1)
if (c
<
'0'
Ig c
>
'9')
#ifdef DEBUG
printf("Error: expected number but got
Xc",
c);
#endif
return -1;
I
num - hexto-int(c) + 10*num;
#ifdef DEBUG
printf("Xc\n", c);
tendif
}
c - string[++i];
0') && (c <-'9') 1
} while ((c >c -- '\r'))
I c - \n'
(c -- ''I
if (ops(num.ops] -- 3)
opsnum-ops] - OPCODE4;
else if (ops [numops] -- 4)
ops [numops) - OPCODE5;
code (numops) - num;
numops++;
return i;
break;
case 5:
166
// no opcode
ops [num-ops] - OPCODE6;
code[numops] - OPCODE6;
num-ops++;
// no operation
return 1;
break;
default:
return 1;
break;
/* compile the pulse code program - it'll even check for
errors if there is an error then put the error message in
the string last.error the parser is a very very very simple
parser that just parses the pulse code
int CompilePulseCode(char * program)
{
char c;
int i;
int rval;
char * str;
c
0;
=
i= 0;
rval =
0;
if (program == 0)
return -1;
c = program[i];
while (c != 0)
{
// found a token
#ifdef DEBUG
printf("HI HI 1 -> pass: token %c\n", c);
#endif
if
(c
'c'
==
c
==
'C')
{
// get the command
rval = ParseCommand( &program[i+1] );
if ( rval == -1 )
return -1;
i
rval;
+=
c = program[i];
if ( num.ops > MAX-INSTRUCTIONS )
return -1; // too many instructions
c = program[++i];
}
// kind of ugly code here <blah>
else if (c == ' IIc == '\n' IIc == '\r' II
c== ''
1c==
'+'
c ==OxD II c == '0'
c
==
I|c-==0x0A II
Ic == 'D' I|
'A')
{
c = program[++i];
}
else
{
strcpy(last..error, "Blah: unexpected token\n\0");
return -1;
}
}
*ifdef DEBUG
printf("Done Parsing data!\n");
#endif
return 1;
}
/** PARSING FUNCTIONS FOR GET METHODS
*
*
Parse one token 'foo=bar',matching 'foo' to the name field in
the struct, and storing 'bar' into the value
void parse-token(HttpState* state)
{
auto
int
i, len;
for(i=0; i<HTTP.MAXBUFFER; i++) {
if(state->buffer[i] == '-'
state ->buffer[i] = '\0';
}
state->p = state->buffer + strlen(state->buffer) + 1;
167
for(i=0; i<(sizeof(FORMSpec)/sizeof(FORMType)); i++) {
if(!strcmp(FORMSpec[i].name,state->buffer)) {
len = (strlen(state->p)>MAXFORMSIZE) ? MAX-FORMSIZE - 1: strlen(state->p);
strncpy(FORMSpec[i].value , state->p, 1+len);
FORMSpec[i].value[MAXFORMSIZE - 1] = \O';
}
}
}
parse the following string
"variable=data&variable2=data2&variable3=data3\
0"
no spaces allowed
int parse-get2(HttpState * state)
{
char lvalue[25];
char rvalue[255];
char * q;
int k;
int lvalSet;
int i;
memset(lvalue, 0, 25);
memset(rvalue, 0, 255);
IvalSet = 0;
k = 0;
q = state->p;
// if nul is already passed in just return 1
if (*state->p == '\0') return 1;
while (1)
{
if (*state->p ==
{ // copy the ivalue
strncpy(lvalue, q, k);
q = state->p + 1;
k = 0;
IvalSet
1;
}
if ( (*state->p == '&')
{
(*state->p ==\))
if (lvalSet == 0) { printf("GET: parse error\n"); return 0; } //error
strncpy(rvalue, q, k-1);
// copy the rvalue
q = state->p + 1;
k = -1;
// copy Ivalue and rvalue into formspec
// clear Ivalue and rvalue
for (i=0; i < NUM-FIELD-INPUTS; i++)
{
if (strcmp(lvalue, FORMSpec[i].name) == 0)
{
memset(FORMSpec[i].value, 0, 255);
strcpy(FORMSpec[i].value, rvalue);
}
}
#ifdef -DEBUGprintf("lvalue - %s\n", Ivalue);
printf("rvalue - %s\n", rvalue);
#endif
IvalSet = 0;
memset(lvalue, 0, 25);
memset(rvalue, 0, 255);
if (*state->p =='\0') return 1;
}
state->p++;
k++;
return 0;
}
+
*
parse the url-encoded POST data into the FORMSpec struct
(ie: parse 'foo=bar&baz=qux'into the struct
int
{
parse-post(HttpState* state)
auto int retval;
auto int len;
auto int status;
auto
int
j;
while (1)
{
retval = sock-fastread((sock-type *)&state->s, state->p,1);
168
// read data off of the socket
if (state->method == HTTP-METHOD-GET)
// get method is detected...
//rabbit board, doesn't provide a nice
// way of obtaining
// data from the client, but luckily i
// found out that the information is
// embedded in the url
// just after a null character!!!
j - 0;
'\O) j++;
while( state->url[j]
strcpy(state->buffer, &state->url[j+1l);
state->p - state->buffer;
#ifdef -DEBUG_
printf("URL Buffer: %s\n", state->buffer);
#endif
return parse-get2(state);
if (0 -- retval)
{
sstate->p -\'
parse-token(state);
return 1;
}
else if (-I -- retval)
printf("Socket Error\n");
1I (*state->p -'\r)
if((*state->p -- '&)
I (*state->p -- \n'))
{
/* found one token */
*state->p - '\0';
parse_token(state);
state->p - state->buffer;
}
else
{ state->p++; }
}
if ((state->p - state->buffer) > HTTPJMAXBUFFER)
return 1; // pass the bounds
// end while loop
return 0;
/* end of data - loop again to give it time to write more */
I
// run the pulse ...
//toggles the output of port c between 0 and 5
// for the period requested (period)
void RunPulse(char count)
{
// for now we assume that x is greater than 0
// (and not equal to it)
static char y;
y - count;
// printf ("count - %d", y);
#asm
ipset 3
push
push
Id a,
ioi Id
Id a,
ioi Id
; 4 clocks - turn off interrupts it's not reccomended i do this,
but i will any ways. :-)
af
bc
10 clocks - save the register
0x51
(WDTTR), a ; disable the watch dog timer
Ox54
(WDTTR), a
Id a, Ox00
ioi Id (PCFR). a
blink:
Id c, a
; save led state
ioi ld(PCDR),a ; blink
//ioi ld(PADR),a ; blink
Id a, (y)
id b, a; 6 clocks - a is suppose to be 16-bits
Id a, c
;restore led sate
loop:
djnz loop
; 5 clocks - jump two bytes
done:
xor a, OxFF
jr blink
pop bc
pop af
ipres ; 4 clocks - restore the interrupts
169
#endasm
}
/* initialize port a
void initialize-ports()
{
#asm
lda,0x84; port a all outputs
ioi ld(SPCR),a
ld(SPCRShadow), a; load value into shadow register
xora; port e bit 1..7 inputs, 0 output
ioi ld(PEFR),a
ld(PEFRShadow), a; load shadow register
lda,0x01
ioi ld(PEDDR),a
ld(PEDDRShadow), a; load shadow register
xora
ioi ld(PECR),a
ld(PECRShadow), a
Ida, OxOF; turn off the leds ( i hope)
ioi ld (PADR), a
#endasm
I
void initialize.parser()
{
num.ops = 0;
memset(code, 0, MAXINSTRUCTIONS);
memset(ops, 0, MAXINSTRUCTIONS);
memset(last-error, 0, 255);
}
void RunHPulseProgram(int t-prep, int t-prep-unit, int t-pulse,
int t.pulse-unit, int t.recover, int t.recover-unit, int t-acq,
int t-acq-unit, int t-reps)
{
return;
I
/*
MAIN
/
main()
{
int hpul-count;
int recover-count;
FORMSpec[0].name = "enterA";
FORMSpec[1].name = "enterB";
FORMSpec{2].name = "enterC";
FORMSpec{3].name = "enterD";
FORMSpec[4].name = "enterFreq";
FORMSpec[5].name = "enter-pp";
FORMSpec[6].name = "enterTprep";
FORMSpec[7].name = "enterHPulse";
FORMSpec[8].name = "enter-recover";
FORMSpec[9].name = "enter-ack";
FORMSpec[10].name = "enter-prep-unit";
FORMSpec[11].name = "enter-acq-unit";
FORMSpec[12].name = "enterreps";
FORMSpec[13].name = "p,";
FORMSpec[14].name = "acq";
FORMSpec[15].name = "recover";
FORMSpec[16].name = "prep";
FORMSpec[17].name = "nsamp";
FORMSpec[18].name = "code";
mainState = 1;
initialize-portsO;
initialize-parsero;
the TCP/IP stack
sock-inito; /Initializes
http-inito; // Initializes the web server
tcp-reserveport(80);
while (1)
switch (mainState)
case 1:
http-handlero;
break;
case 2:
// run pulse code here (halt the rest of the program)
hpul-count = (int) (Freq / 0.24);
RunPulse(Freq);
break;
case 3:
170
// run hpulse code
TReps = -1;
hpul-count = (int) (THPulse / 0.24); // convert to units
recover..count = (int) (TRecover / 0.24);
RunHPulseProgram(TPrep, 1, hpul.count, 1, recover-count, 1, TAck, 1. -1);
break;
case 4:
TReps = -1;
hpul-count = (int) (THPulse / 0.24);
recover-count = (int) (TRecover / 0.24);
RunHPulseProgram(TPrep, 0, hpul-count, 1, recover.count, 1, TAck, 1, -1);
break;
case 5:
TReps = -1;
hpul-count = (int) (THPulse / 0.24);
recover-count = (int) (TRecover / 0.24);
RunHPulseProgram(TPrep, 1, hpul.count, 1, recover-count, 1, TAck, 0, -1);
break;
case 6:
TReps = -1;
hpul-count = (int) (THPulse / 0.24);
recover-count = (int) (TRecover / 0.24);
RunHPulseProgram(TPrep, 0, hpul-count, 1, recover..count, 1, TAck, 0, -1);
case 7:
hpul-count = (int) (THPulse / 0.24);
recover-count = (int) (TRecover / 0.24);
#ifdef DEBUG
printf("run once code\n");
printf("T Prep - %d\n", TPrep);
printf("T HPulse - %d\n", THPulse);
printf("T Recover - Xd\n", TRecover);
printf("T Acqusition - Xd\n", TAck);
#endif
RunHPulseProgram(TPrep, 0, hpul-count, 1, recover-count, 1, TAck, 1, TReps);
http-handlero;
mainState = 1;
break;
case 8:
RunPulseProgram2(TReps);
http-handlero;
mainState = 1;
break;
default:
}
}
}
171
. . S1
S4 RF
.. .. ..
PULSE
85ACa DL~sE
.N
P..
.P......
... . ........
Figure B-6: The PCB layout of the rabbit daugther board
172
Appendix C
VHDL Pulse Programmer
The source code for the VHDL pulse programmer is included in this appendix section.
173
buscntrl.vhd
Entity: buscntrl (main test FSM)
File: buscntrl.vhd
-Date: 25-Mar-03
-- Abstract: bus controller... controls reading and writing
~~ to the DI02 board.
-INPUTS: (1) mclk (master clock) = 50MHz
-(2) clk (slowed clock for the DI02 display multiplexer)
-(3) stClk (slowed clock for the state Machine)
-(4) databuf (read or write data)
-(5) adrbuf (address of the device requested)
-(6) read '1' to executed
-- (7) write '1' to execute
-(8) ready '1' means it is waiting for a command
->>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
->>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
->>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
---
library IEEE;
use IEEE.STDLOGIC_1164.ALL;
use IEEE.STDLOGIC_ARITH.ALL;
entity buscntrl is
port (--mclk
: in STD._LOGIC;
- master clock
: in STDLOGIC;
-- slowed clock
stClk
: in STDLOGIC;
-state machine cl
ock
reset
: in STD_LOGIC;
-- input
databuf : in STDLOGICVECTOR(7 downto 0);
-data to read/write
adrbuf
: in STD_LOGICVECTOR(2 downto 0);
-device to address
read
: in STDLOGIC;
-- '1'
to read data
write
: in STD._LOGIC;
-'1' to write data
ready
: buffer STD_LOGIC;
-'1' when done,
or nothing is happening and it's
ready for use
-external lines
data
inout STD_LOGIC_VECTOR(7 downto 0);
adr
: out STDLOGICVECTOR(2 downto 0);
-: out STDLOGIC;
Os
chip select ('1' to write
/read)
out STD_LOGIC;
we
write enable ('1'
to lato
h data)
out STDLOGIC;
read enable ('1' to read
data)
dclk
: out STDLOGIC
clk
signal busdir
signal
signal ctlwe
signal ctloe
-- signal
begin
ctlcs
ctladr
cs
<=
-'1' read, '0' write
STDLOGIC;
STDLOGIC;
STDLOGIC;
STDLOGIC;
: STD.LOGICVECTOR(2 downto 0);
ctl_cs;
we <= ctl_we;
oe
<=
ctl-oe;
-- write pins if busdir = '0'
data <= databuf when busdir = '0' else "ZIZZIZZ";
--data <=
"11110000" when busdir = '0' else "01010101";
--and databuf = "11110000"
--data <= "11110000";
--adr <= "100" when adrbuf = "100" else
-"101" when adrbuf = "101";
adr <= adrbuf;
dclk <= clk;
-clock for DI02 display multiplexer
-state machine to output lines
process(stBusCurr, stBusNext, read, write)
begin
case stBusCurr is
when
=> -- idle state
-read data
if read = '1' then
stBusNext <= stBusRead;
elsif
write = '1' then
stBusNext <= stBusWrite;
else
stBusNext <= stBusIdle;
end if;
stBusIdle
output
otlocs <=
ctl we <=
ctloe <=
ready <= '1';
busdir <=
--
---
oe
:
:
:
:
on lines...
'0';
'0';
'0';
'0';
when stBusRead =>
-read 1
stBusNext <= stBusRead-b;
-output
ctl-cs <=
ctl-we <=
ctloe <=
ready <= '0';
busdir <=
end entity;
architecture behaviour of buscntrl is
bus states for writing and readii
type bstate is (stBusReset,
on lines...
'1';
'0';
'0';
'1';
--
when
stBusIdle,
--
stBusRead,
--
Idle bus
First state of read cycle
--
First state of write cycle
stBusRead__b,
stBusCurr
stBusNext
<=
read 2
stBusRead_c;
--
output on lines...
ctl-cs <= '1';
ctl-we <= '0';
ctl-oe <= '1';
ready <= '0';
busdir <= '1';
databuf <= data;
stBusWrite_b,
stBusWritec);
-signals
: bstate;
signal
signal stBusNext : bstate;
=>
--
stBusReadc,
stBusWrite,
StBusReadb
-when
stBusReadc
if
(read
=>
-read 3
= '1') then
buscntrl.vhd
Entity: buscntrl (main test FSM)
File: buscntrl.vhd
Date: 25-Mar-03
Abstract: bus controller... controls reading and writing
to the D102 board.
INPUTS: (1) mclk (master clock) = 50MHz
(2) clk (slowed clock for the DIO2 display multiplexer)
(3) stClk (slowed clock for the state Machine)
(4) databuf (read or write data)
-(5) adrbuf (address of the device requested)
-(6) read '1' to executed
-- (7) write '1' to execute
-(8) ready '1' means it is waiting for a command
->>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
->>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
->>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
signal busdir :
signal ctl_cs :
signal ctlwe :
signal ctl_oe :
-- signal ctladr
begin
----------
cs
<=
STD_LOGIC;
-'1' read, '0' write
STDLLOGIC;
STDLOGIC;
STD_LOGIC;
: STD_L.OGICVECTOR(2 downto 0);
ctl_cs;
we <= ctl-we;
Oe <= ctloe;
write pins if busdir = '0'
data <= databuf when busdir = '0'
else "ZZZZZZZZ";
--data <=
"11110000" when busdir = '0' else "01010101"
--and databuf = "11110000"
--data <= "11110000";
--adr <= "100" when adrbuf = "100" else
-"101" when adrbuf = "101";
adr <= adrbuf;
-clock for DI02 display multiplexer
dclk <=
--
library IEEE;
use IEEE.STDLOGIC.1164.ALL;
use IEEE.STD_LOGIC_kRITH.ALL;
clk;
state machine to output lines
process(stBusCurr, stBusNext, read, write)
begin
case stBusCurr is
when
=> -- idle state
-read data
if read = '1' then
stBusNext <= stBusRead;
elsif write = '1' then
stBusNext <= stBusWrite;
else
stBusNext <=
end if;
--
entity busentrl is
: in STD_LOGIC;
-port (--mclk
clk
: in STDLOGIC;
slowed clock
-stClk : in STDLOGIC;
ock
reset : in STDLOGIC;
-- input
databuf : in STD,_LOGICVECTOR(7 downto 0);
-data
adrbuf
: in STDLOGICVECTOR(2 downto 0);
read
: in STD_LOGIC;
write
: in STDLOGIC;
ready
: buffer STD_LOGIC;
or nothing is happening and it's ready for use
-- external lines
data
: inout STDLOGIC VECTOR(7 downto 0);
adr
: out STD_LOGICVECTOR(2 downto 0);
cs
: out STDLOGIC;
-/read)
out STD._LOGIC;
we
h data)
out STD_LOGIC;
data)
dolk
: out STD_LOGIC
Oe
master
clock
stBusIdle
--
state machine cl
to read/write
-- device to address
-'1' to read data
-'1' to write data
-- '1' when done,
stBusIdle;
--
output on lines...
ctlcs
ctl-oe
chip select
--write enable
-- read enable
('1'
('1'
to latc
('1'
to read
<=
'0';
'0';
ready <= '1';
busdir <= '0';
to write
when
stBusRead
=>
-read 1
stBusNext <= stBusReadb;
--
output on lines...
ctlcs
end entity;
<=
'1';
ctlwe <= '0';
ctleoe <= '0';
ready <= '0';
busdir <= '1';
architecture behaviour of buscntrl is
bus states for writing and readir
type bstate is (stBusReset,
stBusIdle,
-stBusRead,
-stBusReadb,
stBusReadtc,
stBusWrite,
-stBusWriteb,
stBusWritec);
<=
ctlwe <= '0';
--
signals
signal stBusCurr : bstate;
signal stBusNext : bstate;
--
when stBusReadb =>
-read 2
stBusNext <= stBusReadc;
Idle bus
First state of read cycle
output on lines...
<= '1';
we <= '0';
ctl-oe <= '1';
ready <= '0';
busdir <= '1';
databuf <= data;
--
ctlecs
First state of write cycle
ctl
-when
stBusReadc
if
(read
=
=>
-read 3
'1') then
buscntrl.vhd
signal busdir :
signal ctl-cs :
ctl_we :
ctloe
:
-- signal ctladr
begin
Entity: buscntrl (main test FSM)
File: buscntrl.vhd
Date: 25-Mar-03
-- Abstract: bus controller... controls reading and writing
-- to the DI02 board.
-INPUTS: (1) mclk (master clock) = 50MHz
-(2) clk (slowed clock for the DI02 display multiplexer)
-(3) stClk (slowed clock for the state Machine)
-(4) databuf (read or write data)
-(5) adrbuf (address of the device requested)
-(6) read '' to executed
(7) write '1' to
--(8) ready '1' means it is waiting for a command
->>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
->>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
->>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
----
signal
signal
STDLOGIC;
STDLOGIC;
--
''
read, '0' write
STDLOGIC;
STDLOGIC;
: STDLOGIC_VECTOR(2 downto 0);
cs
<= ctl-cs;
we <= ctlwe;
oe
execute
<=
ctl_oe;
write pins if busdir = '0'
data <= databuf when busdir = '0' else "ZZZZZZZZ";
"11110000" when busdir = '0' else "01010101";
--data <=
--and databuf = "11110000"
--data <= "11110000";
--adr <= "100" when adrbuf = "100" else
-"101" when adrbuf = "101";
adr <= adrbuf;
dclk <=
-clock for DIO2 display multiplexer
--
library IEEE;
use IEEE.STD_LOGICl64.ALL;
use IEEE.STDLOGIC_.ARITH.ALL;
clk;
state machine to output lines
process(stBusCurr, stBusNext, read, write)
begin
case stBusCurr is
when
=> -- idle state
-- read data
if read = '1' then
stBusNext <= stBusRead;
elsif write = '1' then
stBusNext <= stBusWrite;
else
stBusNext <=
end if;
--
entity buscntrl is
port (--mclk
: in STDLOGIC;
-clk
: in STD_LOGIC;
-slowed clock
stClk : in STDOLOGIC;
ock
reset : in STDLOGIC;
-input
databuf : in STDLOGICECTOR(7 downto 0);
-data
adrbuf
: in STD_LOGICVECTOR(2 downto 0);
read
: in STD_LOGIC;
write
: in STDLOGIC;
ready
: buffer STDLOGIC;
or nothing is happening and it's ready for use
-external lines
data
: inout STD_LOGIC_VECTOR(7 downto 0);
adr
: out STDLOGICVECTOR(2 downto 0);
out STDLOGIC;
-/read)
we
-out STDLOGIC;
h data)
out STDLOGIC;
-data)
dclk
: out STDLOGIC
cs
master clock
stBusIdle
--
state machine cl
to read/write
-- device to address
-'1' to read data
-'1' to write data
-'1' when done,
stBusIdle;
output on lines...
<= '0';
ctlwe <= '0';
otl-oe <= '0';
ready <= '1';
busdir <= '0';
--
ctlocs
chip select
('1'
to write
write enable ('1'
to latc
read enable
to read
when
('1'
output
ctl cs <=
ctl-we <=
otl-oe <=
ready <= '0';
busdir <=
--
end entity;
architecture behaviour of buscntrl is
bus states for writing and readir
type bstate is (stBusReset,
=>
-read 1
stBusNext <= stBusReadb;
stBusRead
on lines...
'l';
'0';
'0';
'1';
--
when
stBusIdle,
--
stBusRead,
stBusReadb,
stBusReadc,
--
Idle bus
First state of read cycle
stBusWrite,
--
First state of write cycle
-read 2
stBusNext <= stBusReadc;
--
=>
output on lines...
ctl cs
<=
'l';
ctl-we <= '0';
ctl-oe <= '1';
ready <= '0';
busdir <= '1';
databuf <= data;
stBusWriteb,
stBusWritec);
signals
signal stBusCurr : betate;
signal stBusNext : betate;
stBusRead-b
--
when
stBusRead_c
if
(read
=>
=
'1')
--
read 3
then
buscntrl.vhd
signal busdir : STDLOGIC;
-'1' read, '0' write
signal ctlcs
: STDLOGIC;
signal ctlwe : STDLOGIC;
signal ctloe
: STDLOGIC;
-- signal ctl-adr : STD._LOGICVECTOR(2 downto 0);
begin
Entity: buscntrl (main test FSM)
File: buscntrl.vhd
-- Date: 25-Mar-03
-Abstract: bus controller... controls reading and writing
-to the DI02 board.
INPUTS: (1) mclk (master clock) = 50MHz
--(2) olk (slowed clock for the DI02 display multiplexer)
-(3) stClk (slowed clock for the state Machine)
-(4) databuf (read or write data)
-(5) adrbuf (address of the device requested)
-(6) read '1' to executed
(7) write '1' to execute
--(8) ready '1' means it is waiting for a command
->>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
->>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
->>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
---
cs
we
oe
<=
<=
<=
ctl_cs;
ctlwe;
ctl oe;
-- write pins if busdir = '0'
data <= databuf when busdir = '0' else "ZZZZZZZZ";
--data <=
"11110000" when busdir = '0' else "01010101":
--and databuf = "11110000"
--data <= "11110000";
--adr <= "100" when adrbuf = "100" else
-"101" when adrbuf = "101";
adr <= adrbuf;
dclk <=
-clock for DI02 display multiplexer
library IEEE;
use IEEE.STDLOGIC_1164.ALL;
use IEEE.STD LOGICARITH.ALL;
clk;
state machine to output lines
process(stBusCurr, stBusNext, read, write)
begin
case stBusCurr is
when stBusIdle => -- idle state
-- read data
if read = '1' then
stBusNext <= stBusRead;
elsif
write = '1' then
stBusNext <= stBusWrite;
else
stBusNext <= stBusIdle;
end if;
--
entity buscntrl is
port (--mclk
: in STD_LOGIC;
-elk
: in STD._LOGIC;
-slowed clock
: in STDLOGIC;
ock
reset
: in STDLOGIC;
-- input
databuf : in STDLOGICVECTOR(7 downto 0);
-data
adrbuf
: in STDLOGICVECTOR(2 downto 0);
read
: in STDLOGIC;
write
: in STDLOGIC;
ready
: buffer STDLOGIC;
or nothing is happening and it's ready for use
-external lines
data
: inout STDLOGICVECTOR(7 downto 0);
adr
: out STD_LOGIC_VECTOR(2 downto 0);
cs
out STDLOGIC;
-/read)
out STDLOGIC;
h data)
out STDLOGIC;
data)
dclk
: out STDLOGIC
master clock
stClk
--
state machine
to read/write
-- device to address
-- '' to read data
-'1' to write data
-'1' when done,
chip select ('1'
-- write enable
-- read enable
we
cl
('1'
-output
ctl-cs <=
ctl-we <=
ctl-oe <=
ready <= '1;
busdir <=
to write
to late
when
('1'
stBusRead
=>
stBusNext
to read
--
on lines...
'0';
'0';
'0';
'0';
read 1
<= stBusReadb;
--
output on lines...
ctlocs
<=
'1';
ctl-we <= '0';
end entity;
ctl-oe
'0';
ready <= '0';
busdir <= '1';
architecture behaviour of buscntrl is
bus states for writing and readir
type bstate is (stBusReset,
stBusIdle,
--
<=
--
stBusRead,
--
Idle bus
First state of read cycle
stBusRead-b,
stBusRead_c,
stBusWrite,
stBusWriteb,
stBusWrite_c);
--
First state of write cycle
signals
signal stBusCurr : bstate;
signal stBusNext : betate;
--
when stBusRead-b =>
-read 2
stBusNext <= stBusReadc;
-- output on lines...
ctlocs <= 'l';
ctl-we <= '0';
ctl-oe
--
<=
'1';
ready <= '0';
busdir <= '1';
databuf <= data;
read 3
-when stBusReadc =>
if (read = '1') then
buscntrl.vhd
--------------
Entity: buscntrl (main test FSM)
File: buscntrl.vhd
Date: 25-Mar-03
Abstract: bus controller... controls reading and writing
to the DI02 board.
INPUTS: (1) mclk (master clock) = 50MHz
(2) clk (slowed clock for the DI02 display
(3) stClk (slowed clock for the state Machine)
(4) databuf (read or write data)
(5) adrbuf (address of the device requested)
(6) read '1' to executed
(7) write '1' to execute
(8) ready '1' means it is waiting for a command
->>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
->>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
->>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
-'l' read, '0' write
signal busdir : STDLOGIC;
signal ctl-cs : STDJLOGIC;
signal ctlwe : STD._LOGIC;
signal ctleoe : STDLOGIC;
-- signal ctl-adr : STDLOGICVECTOR(2 downto 0);
begin
multiplexer)
cs
<=
ctl_cs;
we <=
ctlwe;
oe
ctl_oe;
<=
write pins if busdir = '0'
data <= databuf when busdir = '0' else "ZZZZZZZZ";
--data <= "11110000" when busdir = '0' else "01010101":
--and databuf = "11110000"
--data <= "11110000";
--adr <= "100" when adrbuf = "100" else
-"101" when adrbuf = "101":
adr <= adrbuf;
dclk <= clk;
-clock for DI02 display multiplexer
--
library IEEE;
use IEEE.STD_LOGIC_1164.ALL;
use IEEE.STDLOGICARITH.ALL;
machine
state
to output lines
process(stBusCurr, stBusNext, read, write)
begin
case stBusCurr is
when stBusIdle => -- idle state
-read data
if read = '' then
stBusNext <= stBusRead;
elsif
write = '1' then
stBusNext <= stBusWrite;
else
stBusNext <= stBusIdle;
end if;
--
entity buscntrl is
port (--mclk
: in STDLOGIC;
-clk
: in STDLOGIC;
-slowed clock
stClk
: in STD._LOGIC;
ock
reset
: in STDELOGIC;
-- input
databuf : in STD_LOGICVECTOR(7 downto 0);
-data
adrbuf
: in STDLOGICVECTOR(2 downto 0);
read
: in STD._LOGIC;
write
: in STDLOGIC;
ready
: buffer STDLOGIC;
or nothing is happening and it's ready for use
-- external lines
data
: inout STDLLOGICVECTOR(7 downto 0);
adr
: out STDLOGICVECTOR(2 downto 0);
ce
: out STDLOGIC;
-/read)
out STD._LOGIC;
h data) we
out STD_LOGIC;
data)
dclk
: out STDLOGIC
master
--
clock
state machine
cl
to read/write
-device to address
-'1'
to read data
-'1' to write data
-'1'
when done,
output
on lines...
ctl-cs <= '0';
ctlwe <= '0';
--
ctloe
chip select ('1'
-- write enable
-- read enable
('1'
to write
<=
'0';
ready <= '1';
busdir <= '0';
to late
when stBusRead =>
stBusNext
('1' to read
--
-read 1
<= stBusRead-b;
output on lines...
<= '1';
<= '0';
ctlcs
end entity;
ctlwe
architecture behaviour of buscntrl
etloe
j
<=
ready <= '0';
busdir <=
bus states for writing and readir
type betate is (stBusReset,
'0';
'1';
--
stBusldle,
stBusRead,
---
Idle bus
First state of read cycle
stBusReadbD,
otBusReadtc,
stBusWrite,
stBusWriteb,
stBusWritc);
--
First state of write cycle
signals
signal stBusCurr : batate;
signal stBusNext : bstate;
--
when stBusRead b =>
-read 2
stBusNext <= stBusReadec;
output on lines...
ctlcs
<= '1';
ctlwe <= '0';
ctl-oe <= '1';
ready <= '0';
busdir <= '1';
databuf <= data;
--
--
when
stBusReadtc
if
(read
=
=>
-read 3
'1') then
buscntrlvhd
buscntrl
Entity:
(main test FSM)
File: buscntrl.vhd
Date: 25-Mar-03
Abstract: bus controller... controls reading and writing
-- to the DI02 board.
-INPUTS: (1) mclk (master clock) = 50MHz
-(2) clk (slowed clock for the D102 display multiplexer)
-(3) stClk (slowed clock for the state Machine)
-(4) databuf (read or write data)
(5) adrbuf (address of the device requested)
--(6) read '1' to executed
-- (7) write '1' to execute
-(8) ready '1' means it is waiting for a command
->>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
->>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
->>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
-----
signal busdir : STD_LOGIC;
-'1' read, '0' write
signal ctlcs
: STDILOGIC;
signal ctl_we : STD_LOGIC;
signal
: STD_LOGIC;
-- signal ctl-adr : STDLOGICVECTOR(2 downto 0);
begin
ctloe
cs <= ctlcs;
we <= ctl_we;
oe <= ctl-oe;
-write pins if busdir = '0'
data <= databuf when busdir = '0' else "ZZZZZZZZ";
--data <=
"11110000" when busdir = '0' else "01010101";
--and databuf = "11110000"
--data <= "11110000";
--adr <= "100" when adrbuf = "100" else
-"101" when adrbuf = "101";
adr <= adrbuf;
dclk <= clk;
-clock for D102 display multiplexer
library IEEE;
use IEEE.STDLOGIC_1164.ALL;
use IEEE.STDLOGICARITH.ALL;
entity buscntrl is
port (--mclk
: in STD_LOGIC;
-: in STDLOGIC;
-slowed clock
stClk : in STDLOGIC;
ock
reset
: in STDLOGIC;
-- input
databuf : in STDLOGICVECTOR(7 downto 0);
-data
adrbuf
: in
downto 0);
read
: in STDLOGIC;
write
: in
ready
: buffer STD_LOGIC;
or nothing is happening and it's
ready for use
-external lines
data
: inout STDLOGICVECTOR(7 downto 0);
adr
: out STD_LOGIC_VECTOR(2 downto 0);
-ce
: out
/read)
we
: out STD._LOGIC;
h data)
: out STD_LOGIC;
oe
data)
dclk
: out STD._LOGIC
clk
STDLOGICVECTOR(2
STD._LOGIC;
STDLOGIC;
-state machine to output lines
read, write)
process(stBusCurr,
begin
case stBusCurr is
when stBusIdle => -- idle state
-read data
if read = '1' then
stBusNext <= stBusRead;
elsif
write = '1'
then
stBusNext <= stBusWrite;
else
stBusNext <= stBusIdle;
end if;
stBusNext,
master clock
--
state machine
cl
to read/write
-device to address
-'1' to read data
-'1' to write data
-'1'
when done,
chip select ('1'
-- write enable
-- read enable
('1'
('1'
on lines...
'0';
'0';
'0';
output
-ctl-cs <=
ctl-we <=
ctl-oe <=
ready <= '1';
busdir <=
to write
'0';
to late
when stBusRead =>
-read 1
stBusNext <= stBusRead-b;
to read
--
output on lines...
ctl-cs <=
architecture behaviour of buscntrl is
bus states for writing and readir
type bstate is (stBusReset,
stBusIdle,
-stBusRead,
--
'1';
ctl-we <= '0';
ctl-oe <= '0';
ready <= '0';
busdir <= '1';
end entity;
--
when stBusRead.b =>
-read 2
stBusNext <= stBusRead-c;
Idle bus
First state of read cycle
stBusReadhb,
stBusReadc,
stBusWrite,
stBuswriteb,
stBusWrite_c);
signals
signal stBusCurr : bstate;
signal stBusNext : bstate;
--
output on lines...
ctl-cs <= '1';
ctlwe <= '0';
--
--
First state of write cycle
ctl-oe
--
'1';
<=
ready <= '0';
busdir <= '1';
databuf <= data;
when stBusRead-c =>
if
(read = '1')
--
read 3
then
buscntrl.vhd
Entity: buscntrl (main test FSM)
File: buscntrl.vhd
Date: 25-Mar-03
-- Abstract: bus controller... controls reading and writing
-to the D102 board.
-INPUTS: (1) mclk (master clock) = 50MHz
-(2)
(slowed clock for the DI02 display multiplexer)
-(3) stClk (slowed clock for the state Machine)
-(4) databuf (read or write data)
-(5) adrbuf (address of the device requested)
-(6) read '1' to executed
-(7) write '1' to execute
-(8) ready '1' means it is waiting for a command
->>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
->>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
->>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
>>>
----
signal busdir : STDLOGIC;
-'1' read, '0' write
signal ctl_cs : STD -LOGIC;
signal ctlwe : STD_LOGIC;
signal ctloe
: STD_LOGIC;
-- signal ctl-adr : STD__LOGICVECTOR(2 downto 0);
begin
clk
library IEEE;
use IEEE.STD LOGIC 1164.ALLuse IEEE.STDLOGICARITH.ALL;
STD_LOGIC;
STD_LOGIC;
STDLOGICVECTOR(7
STD_LOGIC;
oe
<= ctl cs;
we <= ctl we;
oe <= otl oe;
-- write pins if busdir = '0'
data <= databuf when busdir = '0' else "ZZZZZZZZ";
--data <=
"11110000" when busdir = '0' else "01010101";
--and databuf = "11110000"
--data <= "11110000";
--adr <= "100" when adrbuf = "100" else
-"101" when adrbuf = "101"adr <= adrbuf;
dclk <=
-clock for DI02 display multiplexer
clk;
entity buscntrl is
port (--mclk
: in STD_LOGIC;
-- master clock
: in
-slowed clock
stClk
: in
-state machine cl
ock
reset
: in STDLOGIC;
-- input
databuf : in
downto 0);
-data to read/write
adrbuf : in STDLOGIC VECTOR(2 downto 0);
-device to address
read
: in STD_LOGIC;
-'1'
to read data
write
: in STD._LOGIC;
-'1'
to write data
ready
: buffer
-'1' when done,
or nothing is happening and it's
ready for use
-external lines
data
: inout STDLOGICVECTOR(7 downto 0);
adr
: out
downto 0);
cs
: out
-chip select ('1' to write
/read)
we
out
write enable ('1' to latc
h data)
out
read enable
('1' to read
data)
dclk
: out STD LOGIC
clk
cs
STDLOGICVECTOR(2
STD_LOGIC;
STDLOGIC;
STD._LOGIC;
state machine to output lines
process(stBusCurr, stBusNext, read, write)
begin
case stBusCurr is
when stBusIdle =>
-idle state
-- read data
if read = '1' then
stBusNext <=
elsif write = '1' then
stBusNext <= stBusWrite;
else
stBusNext <= stBusIdle;
end if;
--
stBusRead;
--
output on lines...
ctlcs
<=
'0';
ctl we <= '0';
ctl ?e <= '0';
ready <= '1';
busdir <= '0';
---
when stBusRead =>
-read 1
stBusNext <= stBusRead-b;
output on lines...
<= '1';
<= '0';
ctl-oe <= '0';
ready <= '0';
busdir <= '1';
--
cs
ctl_we
ctl
end entity;
architecture behaviour of buscntrl is
bus states for writing and readir
type bstate is (stBusReset,
stBusIdle,
-stBusRead,
-stBusRead__b,
--
when stBusReadb
stBusNext
Idle bus
First state of read cycle
stBusReadtc'
stBusWrite,
stBusWrite_b,
stBusWritec);
signals
signal stBusCurr : bstate;
signal stBusNext : bstate;
--
First state of write cycle
--
--
=>
<=
-read 2
stBusRead_c;
-- output
ctlcs <=
ctlwe <=
ctl-oe <=
ready <= '0';
busdir <=
databuf <=
on lines...
'1';
'0';
'1';
'1';
data;
when stBusReadoc => -read 3
if (read = '1') then
buscntrl.vhd
signal busdir
signal
signal
signal ctloe
-- signal ctladr
begin
Entity: buscntrl (main test FSM)
-File: buscntrl.vhd
-Date: 25-Mar-03
-- Abstract: bus controller... controls reading and writing
-to the DI02 board.
-INPUTS: (1) mclk (master clock) = 50MHz
-(2)
(slowed clock for the DI02 display multiplexer)
-(3) stClk (slowed clock for the state Machine)
-- (4) databuf (read or write data)
(5) adrbuf (address of the device requested)
--- (6) read '1' to executed
-(7) write '1' to execute
-(8) ready '1' means it is waiting for a command
->>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
->>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
->>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
--
ctl_cs
ctl-we
clk
<= ctlcs;
we <= otl we;
oe
master clock
clk
--
state machine
cl
STDLOGIC;
STD_LOGICVECTOR(2
oe
<=
ctl-oe;
-- write pins if busdir = '0'
data <= databuf when busdir = '0' else "ZZZZZZZZ";
"11110000" when busdir = '0' else "01010101";
--data <=
--and databuf = "11110000"
--data <= "11110000";
--adr <= "100" when adrbuf = "100" else
-"101" when adrbuf = "101";
adr <= adrbuf;
dclk <=
-clock for D102 display multiplexer
clk;
entity buscntrl is
port (--mclk
: in STDLOGIC;
-: in STDLOGIC;
-slowed clock
stClk : in STDLOGIC;
ock
reset
: in
-- input
-data
databuf : in STDLOGICVECTOR(7 downto 0);
adrbuf
: in
downto 0);
read
: in STDLOGIC;
write
: in STDLOGIC;
ready
: buffer STD_LOGIC;
or nothing is happening and it's ready for use
-external lines
downto 0);
data
: inout
downto 0);
adr
: out
-: out STDLOGIC;
/read)
-we
out
h data)
-out
da ta)
dclk
: out STDLOGIC
to read/write
-- device to address
-- '' to read data
-- '1' to write data
-- '1' when done,
-- state machine to output lines
process(stBusCurr, stBusNext, read, write)
begin
case stBusCurr is
when stBusIdle => -- idle state
-- read data
if read = '1' then
st~usNext <= stBusRead;
elsif write = '1' then
stBusNext <=
else
stBusNext <= stBusIdle;
end if;
stBusWrite;
output on lines...
<= '';
<= '0';
<= '0';
ready <= '1';
busdir <= '0';
--
ctlocs
ctl we
ctl-oe
STDLOGICVECTOR(7
STD_LOGICVECTOR(2
STDLOGIC;
STDLOGIC;
chip select
('1'
to write
write enable
('1' to lato
read enable
('1' to read
when stBusRead =>
-read 1
stBusNext <= stBusReadhb;
--
output on lines...
cs
ctl we
ctl-oe
ctl
<=
'';
<= '0';
<= '0';
ready <= '0';
busdir <= '1';
end entity;
architecture behaviour of buscntrl is
bus states for writing and readiz
type bstate is (stBusReset,
stBusIdle,
--stBusRead,
stBusReadtb,
stBusRead.c,
stBusWrite,
-stBusWriteb,
stBusWritec);
--
signals
signal stBusCurr : betate;
signal
: bstate;
--
stBusNext
write
cs
library IEEE;
use IEEE.STDLOGIC_1164.ALL;
use IEEE. STDLOGICARITH . ALL;
cs
STDLOGIC;
:
-'1' read, '0'
: STD-LOGIC;
: STD LOGIC;
: STDLOGIC;
: STD_LOGIC_VECTOR(2 downto 0);
Idle bus
First state of read cycle
First state of write cycle
read 2
-when stBusRead-b =>
stBusNext <= stBusRead
c;
-- output on lines...
ctl-cs <= '1';
ctl-we <= '0';
ctl-oe
<=
'1';
ready <= '0';
busdir <= '1';
databuf <= data;
when stBusReadc => -read 3
if (read = '1') then
buscntrl.vhd
Entity: buscntrl (main test FSM)
File: buscntrl.vhd
-Date: 25-Mar-03
-Abstract: bus controller... controls reading and writing
-to the DI02 board.
-INPUTS: (1) molk (master clock) = 50MHz
-(2)
(slowed clock for the DIO2 display multiplexer)
-(3) stClk (slowed clock for the state Machine)
-- (4) databuf (read or write data)
-- (5) adrbuf (address of the device requested)
-(6) read '1' to executed
-(7) write '1' to execute
-(8) ready '1' means it is waiting for a command
->>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
->>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
->>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
---
clk
library IEEE;
use IEEE.STD_LOGIC_1164.ALL;
use IEEE.STDLOGICARITH.ALL;
signal busdir
signal ctl-cs
signal ctlwe
signal ctloe
-- signal ctladr
begin
: STD LOGIC;
-'1' read, '0' write
: STDLOGIC;
: STD_LOGIC;
: STDLOGIC;
: STDLOGICVECTOR(2 downto 0);
cs
<= ctlcs;
we <= ctl we;
oe <= ctloe;
-- write pins if busdir = '0'
data <= databuf when busdir = '0' else "ZZZZZZZZ";
--data <=
"11110000" when busdir = '0' else "01010101";
--and databuf = "11110000"
--data <= "11110000";
--adr <= "100" when adrbuf = "100" else
-"101" when adrbuf = "101";
adr <= adrbuf;
dclk <= clk;
-clock for DI02 display multiplexer
state machine to output lines
process(stBusCurr, stBusNext, read, write)
begin
case stBusCurr is
when stBusIdle => -- idle state
-- read data
if read = '1' then
stBusNext <= stBusRead;
elsif write = '1' then
stBusNext <= stBusWrite;
else
stBusNext <= stBusIdle;
end if;
--
entity busecntrl is
- master clock
port (--mclk
: in STDLOGIC;
: in STD_LOGIC;
-slowed clock
-state machine cl
stClk : in
ock
reset : in
-- input
-- data to read/write
databuf : in STDLOGICVECTOR(7 downto 0);
downto 0);
-- device to address
adrbuf
: in
-'1' to read data
: in
read
-'1' to write data
write
: in STD_LOGIC;
-'1' when done,
: buffer
ready
or nothing is happening and it's ready for use
external lines
-: inout STDLOGICVECTOR(7 downto 0);
data
downto 0);
: out
adr
-chip select ('1' to write
: out STD_LOGIC;
/read)
out STDLOGIC;
write enable ('1'
to lato
we
h data)
out STDLOGIC;
-read enable
('l' to read
data)
dclk
: out STDLOGIC
clk
STDLOGIC;
STDLOGIC;
STD_LOGIC_VECTOR(2
STDLOGIC;
STDLOGIC;
cs
STD_LOGIC_VECTOR(2
--
oe
ctlocs
on lines...
'0';
'0';
'0';
'0';
-read 1
when stBusRead =>
stBusNext <= stBusRead-b;
output on lines...
<= '1';
<= '0';
<= '0';
ready <= '0';
busdir <= '1';
--
ctlocs
ctl we
ctl-oe
end entity;
architecture behaviour of buscntrl is
-- bus states for writing and reading
type bstate is (stBusReset,
stBusIdle,
stBusRead,
stBusReadb,
---
Idle bus
First state of read cycle
--
First state of write cycle
stBusWrite,
stBusWrite-b,
stBusWriteC);
signals
signal stBusCurr : bstate;
signal stBusNext : bstate;
when stBusRead-b =>
-read 2
stBusNext <= stBusRead_c;
output on lines...
<= '1';
<= '0';
ctloe <= 1';
ready <= '0';
busdir <= '1';
databuf <= data;
--
stBusRead,
--
output
<=
ctl we <=
ctl oe <=
ready <= '1';
busdir <=
--
ctlocs
ctlwe
when stBusRead-c => -read 3
if (read = '1') then
buscntrl.vhd
---
--------
----
--
Entity: busontrl (main test FSM)
File: buscntrl.vhd
Date: 25-Mar-03
Abstract: bus controller... controls reading and writing
to the DIO2 board.
INPUTS: (1) mclk (master clock) = 50MHz
(2) clk (slowed clock for the DI02 display multiplexer)
(3) stClk (slowed clock for the state Machine)
(4) databuf (read or write data)
(5) adrbuf (address of the device requested)
(6) read 'l' to executed
(7) write '' to execute
(8) ready '' means it is waiting for a command
->>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
->>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
->>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
signal
signal
signal
signal
-begin
busdir : STDLOGIC;
-'1' read, '0' write
ctl cs : STD-LOGIC;
ctlwe : STDLOGIC;
ctl-oe
STDLOGIC;
ctl-adr : STDLOGICVECTOR(2 downto 0);
signal
cs
we
<=
ctlcs;
<=
ctl_we;
oe
<=
ctl-oe;
write pins if busdir = '0'
data <= databuf when busdir = '0' else "ZZZZZZZZ";
--data <=
"11110000" when busdir = '0' else "01010101";
--and databuf = "11110000"
--data <= "11110000":
-- adr <= "100" when adrbuf = "100" else
"101" when adrbuf = "101";
-adr <= adrbuf;
dclk <= clk;
-clock for DI02 display multiplexer
--
library IEEE;
use IEEE.STDLOGIC_1164.ALL;
use IEEE.STD_LOGICARITH.ALL;
state machine to output lines
process(stBusCurr, stBusNext, read, write)
begin
case
is
when stBusIdle => -- idle state
-- read data
if read = '1' then
stBusNext <= stBusRead;
elsif write = '1' then
stBusNext <=
else
stBusNext <= stBusIdle;
end if;
--
entity buscntrl is
port (--mclk
: in STDLOGIC;
-: in STDLOGIC;
-slowed clock
stClk : in STDLOGIC;
ock
reset
: in STDLOGIC;
-- input
databuf : in
VECTOR(7 downto 0);
-- data
adrbuf
: in STDLOGICVECTOR(2 downto 0);
read
: in STD LOGIC;
write
: in STDLOGIC;
ready
: buffer STDLOGIC;
ready for use
or nothing is happening and it's
-- external lines
data
: inout STDLOGICVECTOR(7 downto 0);
adr
: out STDLOGICVECTOR(2 downto 0);
: out STDLOGIC;
-/read)
out STD.LOGIC;
h data)
out STDLOGIC;
data)
dclk
: out STDOLOGIC
clk
STDLOGIC
cs
master clock
--
to read/write
-- device to address
-'1' to read data
-- '1' to write data
-'1' when done,
output on lines...
<= '0';
'0';
'0';
ctlcs
chip select ('1'
end entity;
architecture behaviour of buscntrl is
bus states for writing and readir
type bstate is (stBusReset,
-stBusIdle,
-stBusRead,
stBusWrite;
--
-- write enable
-- read enable
we
stBusCurr
elt. machine cI
('1'
('1'
to write
ctl-we <=
ctl-oe <=
ready <= '1';
busdir <=
'0';
to latc
to read
-read 1
when stBusRead =>
stBusNext <= stBusRead-b;
output on lines...
ctlcs
<= '1';
ctl we <=
ctl-oe <=
ready <= '0';
busdir <= '1';
--
--
stBusRead_b,
Idle bus
First state of read cycle
--
stBusRead-c,
stBusWrite,
stBusWrite-b,
stBusWritec);
-signals
signal
: bstate;
signal stBusNext : bstate;
stBusCurr
when stBusReadb =>
-read 2
stBusNext <= stBusReadc;
output on lines...
ctlcs <= '';
--
First state of write cycle
ctlwe <= '0';
ctleoe <= '1';
ready <= '0';
busdir <= 'I';
databuf <= data;
when stBusRead.C =>
-read 3
if (read = '1') then
buscntrl.vhd
STDLOGIC;
STDLOGIC;
--
signal busdir
-'1' read, '0' write
signal ctlcs :
signal ctlwe
STDLOGIC;
signal ctloe
STD_LOGIC;
--signal ctl-adr : STDLOGICVECTOR(2 downto 0);
begin
Entity: buscntrl (main test FSM)
-File: buscntrl.vhd
-Date: 25-Mar-03
-- Abstract: bus controller... controls reading and writing
-- to the DI02 board.
-INPUTS: (1) mclk (master clock) = 50MHz
-(2) clk (slowed clock for the DI02 display multiplexer)
-(3) stClk (slowed clock for the state Machine)
-- (4) databuf (read or write data)
-(5) adrbuf (address of the device requested)
-- (6) read '1' to executed
-(7) write '1' to execute
-(8) ready '1' means it is waiting for a command
->>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
->>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
->>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
STDLOGIC;
STDLOGIC..VECTOR(7
STD_LOGICVECTOR(2
STDLOGIC;
STDLOGICVECTOR(7
STD_LOGICVECTOR(2
STDLOGIC;
es
0);
ctl_cs;
ctl we;
oe
ctl-oe;
master clock
--
state machine ol
to read/write
-device to address
-'1' to read data
-'1' to write data
-'1' when done,
chip select ('1'
-- state machine to output lines
process(stBusCurr, stBusNext, read, write)
begin
case stBusCurr is
when stBusIdle => -- idle state
-- read data
if read = '1' then
stBusNext <= stBusRead;
elsif
write = '1' then
stBusNext <= stBusWrite;
else
stBusNext <=
end if;
stBusidle;
-- output on lines...
ctl cs <= '0';
ctl we <= '0';
tl-oe
<= '0';
ready <= '1';
busdir <= '0';
to write
write enable
('1'
to lato
read enable
('1'
to read
when stBusRead =>
-read 1
stBusNext <= stBusRead-b;
--
-- bus states for writing and readir
type bstate is (stBusReset,
stBusIdle,
--
stBusRead,
stBusRead.b,
stBusReadc,
stBusWrite,
stBuswrite_b,
stBusWrite-c);
--
Idle bus
First state of read cycle
--
First state of write cycle
'';
when stBusRead-b =>
-read 2
stBusNext <= stBusReadc;
--
output on lines...
<= '1';
<= '0';
ctl.oe <= '1';
ready <= '0';
busdir <= 'l';
databuf <= data;
ctlecs
ctl-we
-bstate;
bstate;
<=
<= '0';
<= '0';
ready <= '0';
busdir <= '1';
architecture behaviour of buscntrl is
:
:
output on lines...
ctlcs
ctl we
ctl-oe
end entity;
-signals
signal stBusCurr
signal stBusNext
<=
-- write pins if busdir = '0'
data <= databuf when busdir = '0' else "ZZZZZZZZ";
--data <=
"11110000" when busdir = '0' else "01010101";
--and databuf = "11110000"
--data <= "11110000";
--adr <= "100" when adrbuf = "100" else
-"101" when adrbuf = "101";
adr <= adrbuf;
dclk <= clk;
-clock for DI02 display multiplexer
library IEEE;
use IEEE.STDLOGIC_1164.ALL;
use IEEE.STD_LOGICARITH.ALL;
entity busontrl is
-: in STDLOGIC;
port (--mclk
clk
: in STD_LOGIC;
-slowed clock
stClk : in STDLOGIC;
ock
reset : in
-- input
downto 0);
-data
databuf : in
downto
adrbuf : in
: in
read
write
: in STDLOGIC;
ready
: buffer STD_LOGIC;
or nothing is happening and it's ready for use
-external lines
downto 0);
: inout
data
downto 0);
adr
: out
-: out
/read)
-we
: out STDLOGIC;
h data)
-oe
out STDLOGIC;
data)
dclk
: out STDLOGIC
ces <=
we <=
when stBusReadoc => -read 3
if (read = '1') then
buscntrl.vhd
STDLOGIC;
--
Entity: buscntrl (main test FSM)
-File: buscntrl.vhd
-Date: 25-Mar-03
-Abstract: bus controller... controls reading and writing
-- to the DI02 board.
-INPUTS: (1) mclk (master clock) = 50MHz
-(2)
(slowed clock for the DI02 display multiplexer)
-(3) stClk (slowed clock for the state Machine)
-(4) databuf (read or write data)
-(5) adrbuf (address of the device requested)
-(6) read '1' to executed
-(7) write '1' to execute
-- (8) ready '1' means it is waiting for a command
->>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
->>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
->>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
signal busdir :
-- '1' read, '0' write
signal ctlcs
: STD-LOGIC;
signal ctl_we : STDLOGIC;
signal ctloe
: STDLOGIC;
-- signal ctl-adr : STDLOGICVECTOR(2 downto 0);
begin
clk
cs
<=
<=
ctlcs;
we
oe
<=
ctl-oe;
ctl_we;
-- write pins if busdir = '0'
data <= databuf when busdir = '0' else "ZZZZZZZZ";
-- data <=
"11110000" when busdir = '0' else "01010101";
--and databuf = "11110000"
--data <= "11110000";
--adr <= "100" when adrbuf = "100" else
-"101" when adrbuf = "101";
adr <= adrbuf;
dclk <=
-clock for DI02 display multiplexer
library IEEE;
use IEEE.STD_LOGIC_1164.ALL;
use IEEE.STDLOGICMITH.ALL;
clk;
state machine to output lines
process(stBusCurr, stBusNext, read, write)
begin
case stBusCurr is
stBusIdle => -- idle state
-read data
if read = '1' then
stBusNext <= stBusRead;
elsif
write = '1' then
stBusNext <= stBusWrite;
else
stBusNext <= stBusIdle;
end if;
--
entity buscntrl is
port (--mclk
: in STD_LOGIC;
: in STDLOGIC;
clk
-- slowed clock
stClk : in STDLOGIC;
ock
reset : in
-- input
databuf : in STDLOGICVECTOR(7 downto 0);
-- data
adrbuf
: in STD_LOGICVECTOR(2 downto 0);
read
: in
LOGIC;
write
: in STD_LOGIC;
ready
: buffer STD_LOGIC;
or nothing is happening and it's ready for use
-external lines
data
: inout STDLOGICVECTOR(7 downto 0);
adr
: out STD_-LOGICVECTOR(2 downto 0);
cs
: out STDLOGIC;
/read)
out STDLOGIC;
we
h data)
out STDLOGIC;
-data)
dclk
: out
- master clock
when
--
state machine ol
STDLOGIC;
STD
to read/write
-- device to address
-- '1' to read data
-- '1'
to write data
-'1' when done,
--
-- chip select ('1'
-- write enable ('l'
read enable
('1'
<=
'0';
<= '0';
<= '0';
ready <= '1';
busdir <= '0';
to write
to latc
when stBusRead =>
-read 1
stBusNext <= stBusRead-b;
to read
STDLOGIC
output
<=
<=
ctl-oe <=
ready <= '0';
busdir <=
on lines...
'1';
'0';
'0';
--
ctlocs
ctl_we
end entity;
architecture behaviour of buscntrl is
bus states for writing and readi
type bstate is (stBusReset,
stBusIdle,
-stBusRead,
-stBusReadb,
stBusReadc,
output on lines...
ctlocs
ctl-we
ctl-oe
'';
--
stBusWrite,
when stBusReadb =>
-read 2
stBusNext <= stBusReadc;
Idle bus
First state of read cycle
output on lines...
ctl-cs <= '1';
--
ctlwe
First state of write cycle
signals
signal stBusCurr : bstate;
signal stBusNext : betate;
--
<=
'0';
ctl0oe <= '1';
ready <= '0';
busdir <= '1';
databuf <= data;
stBusWriteb,
stBusWritec);
-when
stBusRead_c
=>
--
if (read = '1')
read 3
then
buscntrl.vhd
ctlcs
clk
STDLOGIC;
STDLOGIC;
STDLOGICVECTOR(7
STDLOGIC;
STDLOGIC;
oe
STDLOGIC;
cs
bus states for writing and readi
type bstate is (stBusReset,
-stBusIdle,
-stBusRead,
stBusReadb,
stBusRead_c,
-stBusWrite,
stBusWrite b,
st3usWritee);
<=
state machine
el
to read/write
-- device to address
-- '1' to read data
-'1' to write data
-- '1' when done,
ctl cs;
-state machine to output lines
process(stBusCurr, stBusNext, read, write)
begin
case stBusCurr is
when stBusIdle => -- idle state
-- read data
if read = '1' then
stBusNext <= stBusRead;
elsif write = '1' then
stBusNext <= stBusWrite;
else
stBusNext <= stBusIdle;
end if;
on lines...
'0';
'0';
<= '0';
ready <= '1';
busdir <= '0';
--
output
ctlocs
ctl we
ctleoe
chip select ('I' to write
-- write enable
--read enable
<=
<=
('1' to late
('1'
to read
when stBusRead =>
-read 1
stBusNext <= stBusReadb;
output
<=
<=
<=
ready <= '0';
busdir <=
--
etlocs
ctlwe
ctloe
on lines...
'1';
'0';
'0';
'1';
--
signals
signal stBusCurr
signal stBusNext
--
: bstate;
: bstate;
Idle bus
First state of read cycle
when stBusRead-b =>
-read 2
stBusNext <= stBusRead_c;
output on lines...
cs <= '1';
we <= '0';
<= '1';
ctloe
ready <= '0';
busdir <= '1';
databuf <= data;
--
First state of write cycle
downto 0);
-- write pins if busdir = '0'
data <= databuf when busdir = '0' else "ZZZZZZZZ";
--data <=
"11110000" when busdir = '0' else "01010101":
--and databuf = "11110000"
-- data <= "11110000";
--adr <= "100" when adrbuf = "100" else
-"101" when adrbuf = "101";
adr <= adrbuf;
dclk <= clk;
-clock for DI02 display multiplexer
--
architecture behaviour of buscntrl is
'1' read, '0' write
we <= ctl,we;
oe <= ctloe;
master clock
end entity;
--
STD.LOGICVECTOR(2
library IEEE;
use IEEE.STDLOGIC_1164.ALL;
use IEEE.STDLOGICARITH.ALL;
entity buscntrl is
-port (--mclk
: in STD_LOGIC;
: in
-- slowed clock
stClk
: in
ock
reset
: in STD LOGIC;
-- input
-data
downto 0);
databuf : in
adrbuf
: in STD_LOGICVECTOR(2 downto 0);
read
: in
: in STD_LOGIC;
write
ready
: buffer
ready for use
or nothing is happening and it's
-- external lines
: inout STDLOGICVECTOR(7 downto 0);
data
: out STDLOGICVECTOR(2 downto 0);
adr
-cs
: out STDLOGIC;
/read)
out STD_LOGIC;
we
h data)
out
data)
dclk
: out STDLOGIC
STD_LOGIC;
signal busdir :
signal
STDLOGIC;
signal ctl_we : STDLOGIC;
signal ctl_oe : STD_LOGIC;
-- signal ctl-adr :
begin
Entity: buscntrl (main test FSM)
-- File: buscntrl.vhd
-- Date: 25-Mar-03
-- Abstract: bus controller... controls reading and writing
-- to the DI02 board.
-INPUTS: (1) molk (master clock) = 50MHz
-(2) clk (slowed clock for the DI02 display multiplexer)
-(3) stClk (slowed clock for the state Machine)
-(4) databuf (read or write data)
-(5) adrbuf (address of the device requested)
-(6) read '1' to executed
-(7) write '1' to execute
(8) ready '1' means it is waiting for a command
-->>>>>>>>>>>>>>>>>>>>>>>>>>> >>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
->>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
->>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
--
ctl
ctl
when stBusReadc =>
-read 3
if (read = '1') then
buscntrl.vhd
Entity: buscntrl (main test FSM)
File: buscntrl.vhd
Date: 25-Mar-03
Abstract: bus controller... controls reading and writing
-to the D102 board.
-INPUTS: (1) mclk (master clock) = 50MHz
-(2) clk (slowed clock for the DI02 display multiplexer)
-(3) stClk (slowed clock for the state Machine)
-(4) databuf (read or write data)
-(5) adrbuf (address of the device requested)
-(6) read '1' to executed
-(7) write 'P' to execute
-- (8) ready '1' means it is waiting for a command
->>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
->>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
->>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
signal busdir : STD-LOGIC;
-'1' read, '0' write
signal ctl_cs : STDLOGIC;
signal ctl_we : STDLOGIC;
signal ctl_oe : STDLOGIC;
-- signal ctl-adr : STDLOGIC_VECTOR(2 downto 0);
begin
-----
cs
<=
ctlocs;
we <= ctl we;
oe <= ctl-oe;
-- write pins if busdir = '0'
data <= databuf when busdir = '0' else "ZZZZZZZZ";
--data <=
"11110000" when busdir = '0' else "01010101":
--and databuf = "11110000"
--data <= "11110000";
--adr <= "100" when adrbuf = "100" else
"101" when adrbuf = "101":
adr <= adrbuf;
dclk <=
-clock for DI02 display multiplexer
library IEEE;
use IEEE.STD_LOGIC_1164.ALL;
use IEEE.STD_LOGICARITH.ALL;
clk;
state machine to output lines
process(stBusCurr, stBusNext, read, write)
begin
case stBusCurr is
when
=>
-idle state
-- read data
if read = '1' then
stBusNext <= stBusRead;
elsif write = '1' then
stBusNext <= stBusWrite;
else
stBusNext <= stBusIdle;
end if;
--
entity busontrl
port (--mclk
clk
--
is
: in STD._LOGIC;
: in STD_LOGIC;
slowed
stClk : in STDLOGIC;
--
master clock
clock
--
state machine
cl
ock
reset
--
: in STD_LOGIC;
input
databuf : in STDLOGICVECTOR(7 downto 0);
-- data
adrbuf
: in STD_.LOGIC_.VECTOR(2 downto 0);
read
: in STD_LOGIC;
write
: in STDLOGIC;
ready
: buffer STDLOGIC;
or nothing is happening and it's ready for use
-external lines
data
: inout STDLOGICVECTOR(7 downto 0);
adr
: out STDLOGICVECTOR(2 downto 0);
cs
: out STDLOGIC;
-/read)
out STDLOGIC;
h data)
out STD._LOGIC;
-data)
: out STDLOGIC
dclk
to read/write
-device to address
-'1'
to read data
-- '1' to write data
-'1' when done,
output on lines...
ctl-cs <= '0';
ctlwe <= '0';
--
ctl-oe
chip select ('1'
-- write
we
stBusIdle
enable ('1'
read enable
('1'
to write
to latc
1
output on lines...
ctl-cs <= '1';
ctl we <= '0';
ctl-oe <= '0';
ready <= '0';
busdir <= '1';
--
architecture behaviour of buscntrl
stBusWrite,
--
when stBusRead-b =>
-read 2
stBusNext <= stBusRead-c;
Idle bus
First state of read cycle
output on lines...
ctl cs <= '1';
ctl we <= '0';
<= 'l';
ready <= '0';
busdir <= '1';
databuf <= data;
--
First state of write cycle
ctl-oe
stBusWriteb,
stBusWritec);
signals
signal stBusCurr : bstate;
signal stBusNext : betate;
--
'0';
when stBusRead =>
-read
stBusNext <= stBusRead-b;
to read
end entity;
-bus states for writing and readii
type bstate is (stBusReset,
stBusIdle,
-stBusRead,
-stBusReadb,
stBusReadc,
<=
ready <= '1';
busdir <= '0';
-when
stBusReadc
=> -read 3
if (read = '1') then
buscntrl.vhd
----
------
---
----
signal busdir : STDLOGIC;
-'1' read, '0' write
signal ctl_cs : STDLOGIC;
signal ctlywe : STDLOGIC;
signal ctloe : STDLOGIC;
--signal ctladr : STDLOGICVECTOR(2 downto 0);
begin
Entity: buscntrl (main test FSM)
File: buscntrl.vhd
Date: 25-Mar-03
Abstract: bus controller... controls reading and writing
to the DI02 board.
INPUTS: (1) molk (master clock) = 50MHz
(2)
(slowed clock for the DIO2 display multiplexer)
(3) stClk (slowed clock for the state Machine)
(4) databuf (read or write data)
(5) adrbuf (address of the device requested)
(6) read '1' to executed
(7) write '' to execute
(8) ready '1' means it is waiting for a command
->>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
->>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
clk
cs
<=
ctl_cs;
we
<=
<=
ctlwe;
ctl_oe;
oe
-- write pins if busdir = '0'
data <= databuf when busdir = '0' else "ZZZZZZZZ";
--data <=
"11110000" when busdir = '0' else "01010101";
--and databuf = "11110000"
--data <= "11110000";
--adr <= "100" when adrbuf = "100" else
-"101" when adrbuf = "101";
adr <= adrbuf;
dclk <=
-clock for DIO2 display multiplexer
->>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
library IEEE;
use IEEE.STDLOGIC_1164.ALL;
use IEEE.STDLOGICARITH.ALL;
clk;
entity buscntrl is
-: in STDLOGIC;
port (--mclk
: in STDLOGIC;
-slowed clock
stClk
: in STD_LOGIC;
ock
reset
: in STD_LOGIC;
-- input
-data
databuf : in STDLOGIC3VECTOR(7 downto 0);
: in STDLOGICVECTOR(2 downto 0);
read
: in STDLOGIC;
: in STD_LOGIC;
write
ready
: buffer STDJLOGIC;
or nothing is happening and it's ready for use
-external lines
: inout STDLOGICVECTOR(7 downto 0);
data
adr
: out STDLOGICVECTOR(2 downto 0);
-cs
: out STDLOGIC;
/read)
out STD_LOGIC;
we
h data)
out STDLOGIC;
data)
dclk
: out STD LOGIC
clk
adrbuf
master clock
--
-- state machine to output lines
process(stBusCurr, stBusNext, read, write)
begin
case
is
when stBusIdle => -- idle
-read data
if read = '1' then
stBusNext <= stBusRead;
elsif write = '1' then
stBusNext <= stBusWrite;
else
stBusNext <= stBusIdle;
end if;
stBusCurr
state machine ci
to read/write
-- device to address
-- '1' to read data
-'1' to write data
-- '1' when done,
state
output
<=
<=
<=
ready <= '1';
busdir <=
--
ctlcs
ctlwe
ctl oe
chip select ('1'
-- write enable
-- read enable
('l'
to write
to latc
when
('1'
to read
on lines...
'0';
'0';
'0';
'0';
stBusRead
=>
-read 1
stBusNext <= stBusRead-b;
output on lines...
<= '1';
<= '0';
ctloe <= '0';
ready <= '0';
busdir <= '1';
--
ctlocs
ctlwe
end entity;
architecture behaviour of buscntrl is
-- bus states for writing and readir
type bstate is (stBusReset,
stBusIdle,
stBusRead,
---
Idle bus
First state of read cycle
--
First state of write cycle
stBusReadb,
when stBusRead-b =>
-read 2
stBusNext <= stBusReadc;
stBusWrite,
stBusWriteb,
stBusWrite-c);
-signals
signal stBusCurr
signal stBusNext
-: bstate;
: bstate;
output on lines...
ctl-cs <= '1';
ctl we <= '0';
ctloe <= '1';
ready <= '0';
busdir <= '1';
databuf <= data;
--
stBusRead.c,
when stBusReadoc => -read 3
if (read = '1') then
buscntrl.vhd
----
-------
-----
-'1' read, '0' write
signal busdir : STDLOGIC;
signal ctl_cs : STD_LOGIC;
signal ctl-we : STDLOGIC;
signal ctl-oe : STDLOGIC;
-- signal ctl-adr : STDLOGICVECTOR(2 downto 0);
begin
Entity: buscntrl (main test FSM)
File: buscntrl.vhd
Date: 25-Mar-03
Abstract: bus controller... controls reading and writing
to the DI02 board.
INPUTS: (1)
(master clock) = 50MHz
(2)
(slowed clock for the DI02 display multiplexer)
(3) stClk (slowed clock for the state Machine)
(4) databuf (read or write data)
(5) adrbuf (address of the device requested)
(6) read '1' to executed
(7) write '1' to execute
(8) ready '1' means it is waiting for a command
>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
clk
mclk
cs
0)
STDLOGIC;
oe
ctlcs;
ctlwe;
oe
ctl_oe;
master clock
--
state machine
cl
to read/write
device to address
--'1' to read data
-'1' to write data
-- '1' when done,
-- state machine to output lines
process(stBusCurr, stBusNext, read, write)
begin
case stBusCurr is
when stBusIdle => -- idle state
-- read data
if read = '1'
then
stBusNext <= stBusRead;
elsif
write = '1'
then
stBusNext <= stBusWrite;
else
stBusNext <=
end if;
stBusIdle;
output
ctlcs <=
ctl we <=
ctloe <=
ready <= '1';
busdir <=
--
chip select ('1'
write enable ('1'
to write
to latc
when
read enable
('1'
to read
signals
signal stBusCurr
signal
stBusNext
'0';
1
read
stBusNext <= stBusRead-b;
=>
--
when stBusReadb =>
-read 2
stBusNext <= stBusReadc;
Idle bus
First state of read cycle
output on lines...
<= '';
ctlwe <= '0';
ctl-oe <= '1';
ready <= '0';
busdir <= '1';
databuf <= data;
--
ctIbcs
--
First state of write cycle
-: bstate;
: bstate;
'0';
'0';
output on lines...
<= '1';
ctl-we <= '0';
ctl-oe <= '0';
ready <= '0';
busdir <= '1';
stBusRead-.b,
--
'0';
ctl-cs
architecture behaviour of buscntrl is
stBusRead.c,
stBusWrite,
stBusWrite_b,
stBusWrite_c);
stBusRead
on lines...
--
end entity;
-- bus states for writing and readii
type bstate is (stBusReset,
-stBusIdle,
etBusRead,
--
<=
-- write pins if busdir = '0'
data <= databuf when busdir = '0' else "ZZZZZZZZ";
--data <=
"11110000" when busdir = '0' else "01010101";
--and databuf = "11110000"
--data <= "11110000";
-- adr <= "100" when adrbuf = "100" else
-"101" when adrbuf = "101";
adr <= adrbuf;
dclk <= clk;
-clock for DI02 display multiplexer
library IEEE;
use IEEE.STDLOGIC_1164.ALL;
use IEEE.STDLOGIC_ARITH.ALL;
entity buscntrl is
port (--mclk
: in STD._LOGIC;
-elk
: in STD_LOGIC;
-slowed clock
stClk : in STD_LOGIC;
ock
reset
: in STDLOGIC;
-- input
databuf : in STDLOGICVECTOR(7 downto 0);
-d ata
adrbuf
: in STD._LOGICVECTOR(2 downto
read
: in STDLOGIC;
write
: in STD_LOGIC;
ready
: buffer STD_LOGIC;
or nothing is happening and it's ready for use
-external lines
data
: inout STDLOGICVECTOR(7 downto 0);
adr
: out STDLOGICVECTOR(2 downto 0);
-cs
: out STD_LOGIC;
/read)
-out
h data)
out STDLOGIC;
-data)
dclk
: out STDLOGIC
<=
we <=
when stBusReadc => -read 3
if (read = '1') then
buscntrl.vhd
----
-----
------
--
Entity: buscntrl (main test FSM)
File: buscntrl.vhd
Date: 25-Mar-03
Abstract: bus controller... controls reading and writing
to the DI02 board.
INPUTS: (1) mclk (master clock) =
(2)
(slowed clock for the DI02 display multiplexer)
(3) stClk (slowed clock for the state Machine)
(4) databuf (read or write data)
(5) adrbuf (address of the device requested)
(6) read '1' to executed
(7) write '1' to execute
(8) ready '1' means it is waiting for a command
->>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
->>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
->>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
signal busdir : STDLOGIC;
-- '1' read, '0'
signal ctlcs
:
signal ctlwe : STD-LOGIC;
signal ctloe : STDLOGIC;
-- signal ctl-adr : STD LOGICVECTOR(2 downto 0);
begin
STDLOGIC;
50MHz
clk
cs
<= ctlcs;
we <= ctl_we;
oe <= ctl-oe;
-- write pins if busdir = '0'
data <= databuf when busdir = '0' else "ZZZZZZZZ";
--data <=
"11110000" when busdir = '0' else "01010101";
--and databuf = "11110000"
-- data <= "11110000";
-- adr <= "100" when adrbuf = "100" else
-"101" when adrbuf = "101";
adr <= adrbuf;
dclk <= elk;
-clock for DI02 display multiplexer
library IEEE;
use IEEE.STDLOGIC_1164.ALL;
use IEEE.STDLOGICARITH.ALL;
state machine to output lines
process(stBusCurr, stBusNext, read, write)
begin
case stBusCurr is
when stBusIdle => -- idle state
-- read data
if read = '1'
then
stBusNext <= stBusRead;
elsif
write = '1'
then
stBusNext <= stBusWrite;
else
stBusNext <= stBusIdle;
end if;
--
entity buscntrl is
-: in
port (--mclk
elk
: in STDLOGIC;
-slowed
stClk : in
ock
reset : in
-- input
downto 0);
-data
databuf : in
downto 0);
adrbuf : in
read
: in STDLOGIC;
write
: in STD LOGIC;
ready
: buffer
ready for use
or nothing is happening and it's
-- external lines
: inout STD_LOGIC_VECTOR(7 downto 0);
data
adr
: out STDLOGIC_.VECTOR(2 downto 0);
cs
: out STDLOGIC;
-/read)
out STDLOGIC;
h data)
out STDLOGIC;
data)
dclk
: out STDLOGIC
STDLOGIC;
clock
STDLOGIC;
STD.LOGIC;
STD_LOGICVECTOR(7
STDLOGICVECTOR(2
STD_LOGIC;
master clock
--
state machine
cl
to read/write
-- device to address
-- '1' to read data
-- '1'
to write data
-- '1' when done,
output on lines...
ctl-cs <= '0';
ctlwe <= '0';
ctl-oe <= '0';
ready <= '1';
busdir <= '0';
--
chip select ('I'
-- write enable
-- read enable
we
to write
('1'
to late
('1'
to read
when stBusRead =>
-read 1
stBusNext <= stBusReadb;
output on lines...
<= '1';
<= '0';
otloe
<= '0';
ready <= '0';
busdir <= '1';
--
ctlocs
ctlwe
end entity;
architecture behaviour of buscntrl
is
-- bus states for writing and readir
type bstate is (stBusReset,
stBusIdle,
stBusRead,
stBusReadb,
---
Idle bus
First state of read cycle
--
First state of write cycle
when stBusReadb =>
-read 2
stBusNext <= stBusRead-c;
--
-signals
signal stBusCurr : bstate;
signal stBusNext : bstate;
output on lines...
ctlocs
stBusRead-c,
stBusWrite,
stBusWriteb,
stBusWritec);
write
ctlwe
--
<=
<=
'1';
'0';
ctl-oe <= '1';
ready <= '0';
busdir <= '1';
databuf <= data;
when stBusRead-c =>
-read 3
if (read = '1') then
buscntr.vhd
Entity: buscntrl (main test FSM)
File: buscntrl.vhd
-Date: 25-Mar-03
-- Abstract: bus controller... controls reading and writing
-to the DIO2 board.
-INPUTS: (1) mclk (master clock) = 50MHz
-(2)
(slowed clock for the DI02 display multiplexer)
-(3) stClk (slowed clock for the state Machine)
-- (4) databuf (read or write data)
-(5) adrbuf (address of the device requested)
-- (6) read '1' to executed
-(7) write 'l' to execute
-(8) ready '1' means it is waiting for a command
->>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
->>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
->>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
---
signal busdir
signal ctl-cs
signal ctlwe
signal ctloe
:
-- signal ctladr
begin
clk
cs
we
oe
<=
<=
<=
STD_LOGIC;
-'1' read, '0' write
STD-LOGIC;
STDLOGIC;
STDLOGIC;
: STD._LOGIC_VECTOR(2 downto 0);
ctl_cs;
ctlwe;
ctloe;
-- write pins if busdir = '0'
data <= databuf when busdir = '0' else "ZZZZZZZZ";
--data <=
"11110000" when busdir = '0' else "01010101";
--and databuf = "11110000"
-- data <= "11110000";
--adr <= "100" when adrbuf = "100" else
-"101" when adrbuf = "101";
adr <= adrbuf;
dclk <=
-clock for DI02 display multiplexer
library IEEE;
use IEEE.STD._LOGICll64.ALL;
use IEEE.STDLOGICARITH.ALL;
clk;
state machine to output lines
process(stBusCurr, stBusNext, read, write)
begin
case stBusCurr is
when stBusIdle => -- idle state
-- read data
if read = '1' then
<= stBusRead;
elsif write = '1'
then
stBusNext <= stBusWrite;
else
stBusNext <= stBusIdle;
end if;
--
entity buscntrl
port (--mclk
is
: in STD_LOGIC;
: in STDLOGIC;
slowed clock
stClk : in STD-LOGIC;
--
master clock
clk
--
--
state machine cl
ock
reset
--
stBusNext
: in STD LOGIC;
input
databuf : in STDLOGIC.VECTOR(7 downto 0);
-- data
adrbuf
: in STDLOGICVECTOR(2 downto 0);
read
: in STDLOGIC;
write
: in STDLOGIC;
ready
: buffer STD_.LOGIC;
or nothing is happening and it's
ready for use
-- external lines
data
: inout STDLOGICVECTOR(7 downto 0);
adr
: out STDLOGICVECTOR(2 downto 0);
-: out STD_LOGIC;
/read)
: out STDLOGIC;
h data)
oe
: out STD_LOGIC;
-data)
dclk
: out STDLOGIC
cs
we
to read/write
-device to address
-- '1' to read data
-- '1' to write data
-- '1' when done,
--
output on lines...
<= '0';
<= '0';
ctl-oe <= '0';
ready <= '1';
busdir <= '0';
ctlocs
ctl-we
chip select ('1'
-- write enable
read enable
to write
('1'
to latc
('1'
to read
when stBusRead =>
-read I
stBusNext <= stBusRead-b;
output on lines...
ctlcs
<= '1';
ctl we <= '0';
ctl-oe <= '0';
ready <= '0';
busdir <= '1';
--
end entity;
architecture behaviour of buscntrl is
-bus states for writing and readii
type bstate is (stBusReset,
stBusIdle,
stBusRead,
---
Idle bus
First state of read cycle
--
First state of write cycle
when stBusRead-b =>
-read 2
stBusNext <= stBusReadc;
stBusReadb,
stBusReadc,
stBusWrite,
stBusWriteb,
stBusWritec);
-signals
signal stBusCurr : bstate;
signal stBusNext : bstate;
output on lines...
ctlcs <= '1';
ctlwe <= '0';
ctloe <= '1';
ready <= '0';
busdir <= '1';
databuf <= data;
--
--
c => -(read = '1')
when stBusRead
if
read 3
then
buscntrl.vhd
--
signal busdir : STD_LOGIC;
signal ctlcs : STD_LOGIC;
signal ctlwe : STDLOGIC;
signal ctl_oe : STD_LOGIC;
--signal ctl-adr :
begin
Entity: buscntrl (main test FSM)
File: buscntrl.vhd
-Date: 25-Mar-03
-- Abstract: bus controller... controls reading and writing
-- to the DI02 board.
-INPUTS: (1) mclk (master clock) = 50MHz
(slowed clock for the DI02 display multiplexer)
-(2)
(3) stClk (slowed clock for the state Machine)
-(4) databuf (read or write data)
-(5) adrbuf (address of the device requested)
--- (6) read '1' to executed
-- (7) write '1' to execute
-- (8) ready '1' means it is waiting for a command
->>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
---
'1' read,
STDLOGICVECTOR(2
clk
cs
we
oe
->>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
library IEEE;
use IEEE.STDLOGIC-1164.ALL;
use IEEE.STDLOGIC_ARITH.ALL;
<= ctl_cs;
<= ctl we;
<= ctl-oe;
clk;
state machine to output lines
process(stBusCurr, stBusNext, read, write)
begin
case stBusCurr is
when stBusIdle => -- idle state
-read data
if read = '1' then
stBusNext <= stBusRead;
elsif write = '1'
then
stBusNext <= stBusWrite;
else
stBusNext <= stBusIdle;
end if;
--
elk
cs
:
master clock
--
state machine cl
to read/write
-- device to address
-'1' to read data
-'1' to write data
-- '1' when done,
output on lines...
ctlcs <= '0';
--
ctl-we
chip select ('1'
write enable ('1'
to latc
read enable
to read
('1'
<=
when stBusRead =>
-read 1
stousNext <= stBusRead-b;
--
output on lines...
ctlocs
end entity;
ctloe
<=
0'';
'0';
--
output on lines...
<= '1';
<= '0';
ctl-oe <= '1';
ready <= '0';
busdir <= '1';
databuf <= data;
ctlocs
ctlwe
First state of write cycle
stBusWriteb,
stBusWrite-c);
-- signals
signal stBusCurr : bstate;
signal stBusNext : bstate;
'1';
when stBusRead-b =>
-read 2
stBusNext <= stBusReadc;
Idle bus
First state of read cycle
stBusReadc,
--
<=
ready <= '0';
busdir <= '1';
architecture behaviour of buscntrl is
-- bus states for writing and readir
type bstate is (stBusReset,
-stBusIdle,
-stBusRead,
stBusReadb,
'0';
ctl-oe <= '0';
ready <= '1';
busdir <= '0';
to write
ctl-we <=
stBusWrite,
downto 0);
-- write pins if busdir = '0'
data <= databuf when busdir = '0' else "ZZZZZZZZ";
"11110000" when busdir = '0' else '01010101":
--data <=
--and databuf = "11110000"
--data <= "11110000";
--adr <= "100" when adrbuf = "100" else
-"101" when adrbuf = "101";
adr <= adrbuf;
dclk <=
-clock for DI02 display multiplexer
->>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
entity buscntrl is
-: in STDLOGIC;
port (--mclk
: in STDLOGIC;
-slowed clock
stClk : in STDLOGIC;
ock
reset : in STDLOGIC;
-- input
-data
in STD_LOGICVECTOR(7 downto 0);
databuf
adrbuf
: in STDLOGICVECTOR(2 downto 0);
: in STD_LOGIC;
read
write
: in STD_LOGIC;
ready
: buffer STDLOGIC;
ready for use
or nothing is happ ening and it's
-- external lines
inout STDLOGICVECTOR(7 downto 0);
data
out STD LOGICVECTOR(2 downto 0);
adr
out STDLOGIC;
-/read)
out STDLOGIC;
we
h data)
out STDLOGIC;
data)
dclk
: out STDLOGIC
'0' write
--
read 3
when stBusReadc => -if (read = '1') then
buscntrl.vhd
----
----
Entity: buscntrl (main test FSM)
File: buscntrl.vhd
Date: 25-Mar-03
Abstract: bus controller... controls reading and writing
to the DIO2 board.
INPUTS: (1) mclk (master clock) = 50MHz
(2)
(slowed clock for the DI02 display multiplexer)
(3) stClk (slowed clock for the state Machine)
(4) databuf (read or write data)
(5) adrbuf (address of the device requested)
(6) read '1' to executed
(7) write '1' to execute
(8) ready '1' means it is waiting for a command
->>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
signal busdir
STD-LOGIC;
-'1' read, '0' write
signal ctl cs : STD-LOGIC;
signal ctl_we : STDLOGIC;
signal ctloe
: STDjLOGIC;
-- signal ctl-adr : STDLOGICVECTOR(2 downto 0);
begin
clk
---
---
---
--
cs
<= ctlcs;
we <= ctl we;
oe <= ctl-oe;
-- write pins if busdir = '0'
data <= databuf when busdir = '0' else "ZZZZZZZZ";
--data <=
"11110000" when busdir = '0' else "01010101"
--and databuf = "11110000"
--data <= "11110000";
--adr <= "100" when adrbuf = "100" else
-"101" when adrbuf = "101";
adr <= adrbuf;
dclk <=
-clock for DI02 display multiplexer
->>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
library IEEE;
use IEEE.STD_LOGIC_1164.ALL;
use IEEE.STDLOGIC ARITH.ALL;
clk;
state machine to output lines
process(stBusCurr, stBusNext, read, write)
begin
case stBusCurr is
when
=>
-idle state
-- read data
if read = '1' then
stBusNext <=
elsif write = '1' then
stBusNext <= stBusWrite;
else
stBusNext <= stBusIdle;
end if;
--
entity buscntrl is
port (--mclk
: in STD.LOGIC;
-master clock
: in
LOGIC;
-slowed clock
stClk : in STD LOGIC:
-state machine cl
ock
reset : in STDLOGIC;
-- input
databuf : in
downto 0);
-- data to read/write
adrbuf
: in
-device to address
downto 0);
read
: in STD_LOGIC;
-'1' to read data
write
: in STD_LOGIC;
-'1' to write data
ready
: buffer STDLOGIC;
-'1' when done,
or nothing is happening and it's ready for use
-- external lines
data
: inout STDLOGIC_VECTOR(7 downto
adr
: out STDLOGICVECTOR(2 downto
cs
: out STDLOGIC;
-chip select ('1' to write
STD
clk
STD_LOGICVECTOR(7
STDLOGICVECTOR(2
0);
/read)
out
STDLOGIC;
stBusIdle
stBusRead;
--
-- write enable
data)
dclk
:
out
--
read enable
('1'
to latc
('1'
to read
'0';
when stBusRead =>
-read 1
stBusNext <= stBusRead-b;
STD_LOGIC
-output
ctlcs <=
otlewe <=
ctl-oe <=
ready <= '0';
busdir <=
end entity;
architecture behaviour of buscntrl is
bus states for writing and readi
type bstate is (stBusReset,
-stBusIdle,
stBusRead,
-stBusRead~b,
stBusReadc,
stBusWrite,
-stBusWritb,
stBusWritec);
<=
<=
'0';
<= '0';
ready <= '1';
busdir <= '0';
h data) we
out STDLOGIC;
output on lines...
ctl cs
ctlewe
ctl-oe
0);
on lines...
'1';
'0';
'0';
'1';
--
-signals
signal stBusCurr : betate;
signal stBusNext : bstate;
when stBusRead-b =>
-read 2
stBusNext <= stBusRead-c;
Idle bus
First state of read cycle
--
output on lines...
<= '1';
<= '0';
ctlocs
ctl we
ctl-oe
First state of write cycle
--
<=
'l';
ready <= '0';
busdir <= '';
databuf <= data;
when stBusReadc => -read 3
if (read = '1') then
buscntrl.vhd
signal busdir
STDLOGIC;
-'1' read, '0'
signal ctlcs:
STDLOGIC;
signal ctlwe
STDLOGIC;
signal ctlhoe
STDLOGIC;
-- signal ctl-adr : STDLOGIC_VECTOR(2 downto 0);
begin
Entity: buscntrl (main test FSM)
-File: buscntrl.vhd
-Date: 25-Mar-03
-- Abstract: bus controller... controls reading and writing
-to the DI02 board.
-INPUTS: (1) mclk (master clock) = 50MHz
(slowed clock for the DI02 display multiplexer)
-(2)
-(3) stClk (slowed clock for the state Machine)
-- (4) databuf (read or write data)
(5) adrbuf (address of the device requested)
--(6) read '1' to executed
-- (7) write '1' to execute
-- (8) ready '1' means it is waiting for a command
-- >>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
->>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
->>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
--
clk
cs
<=
ctl_cs;
we
<=
<=
ctlwe;
ctloe;
oe
-write pins if busdir = '0'
data <= databuf when busdir = '0' else "ZZZZZZZZ";
--data <=
"11110000" when busdir = '0' else "01010101";
--and databuf = "11110000"
--data <= "11110000";
--adr <= "100" when adrbuf = "100" else
-"101" when adrbuf = "101";
adr <= adrbuf;
-clock for DI02 display multiplexer
dclk <= clk;
library IEEE;
use IEEE.STDLOGIC_1164.ALL;
use IEEE.STDLOGIC_ARITH.ALL;
state machine to output lines
process(stBusCurr, stBusNext, read, write)
begin
case 5tBusCurr is
when stBusIdle => -- idle state
-- read data
if read = '1' then
stBusNext <= stBusRead;
elsif write = '1'
then
stBusNext <= stBusWrite;
else
stBusNext <= stBusIdle;
end if;
--
entity buscntrl is
-: in STDLOGIC;
port (--mclk
; in STD_LOGIC;
-slowed clock
stClk : in
ock
reset : in STDLOGIC;
-- input
-data
databuf : in STD LOGICVECTOR(7 downto 0);
LOGICVECTOR(2 downto 0);
in
adrbuf
read
in STD-LOGIC;
in
write
buffer STDOLOGIC;
ready
or nothing is happening and it's ready for use
-- external lines
: inout STDLOGICVECTOR(7 downto 0);
data
:out STDLOGICVECTOR(2 downto 0);
adr
-: out STD_LOGIC;
cs
/read)
-we
out STD_LOGIC;
h data)
-out STD_LOGIC;
data)
: out STD_LOGIC
dclk
master clock
clk
STDLOGIC;
STD
STD_LOGIC;
--
state machine
cl
to read/write
-device to address
'' to read data
--'1' to write data
-'1' when done,
--
output on lines...
<= '0';
<= '0';
ctlocs
ctl_we
ctl oe
chip select ('1'
write enable ('1'
to latc
read enable
to read
('1'
<=
'0';
ready <= '1';
busdir <= '0';
to write
when stBusRead =>
-read 1
stBusNext <= stBusRead-b;
output on lines...
otlcs <= 1';
ctlwe <= '0';
ctl-oe <= '0';
ready <= 'g';
busdir <= '1';
--
end entity;
architecture behaviour of buscntrl is
bus states for writing and readir
type bstate is (stBusReset,
-stBusIdle,
-stBusReadb,
stBusRead c,
-stBusWrite,
stBusWriteb,
stBusWritec);
--
stBusRead,
signals
signal stBusCurr
signal stBusNext
when stBusRead b =>
stBusNext <=
Idle bus
First state of read cycle
:
:
bstate;
bstate;
--
read 2
stBusReadc;
output on lines...
<= 'I';
ctlwe <= '0';
ctl-oe <= '1';
ready <= '0';
busdir <=
databuf <= data;
--
ctl-cs
First state of write cycle
1';
--
--
write
when stBusRead-c => -read 3
if (read = '1') then
buscntrlvhd
Entity: buscntrl (main test FSM)
-File: buscntrl.vhd
-Date: 25-Mar-03
-- Abstract: bus controller... controls reading and writing
-to the DI02 board.
-INPUTS: (1) mclk (master clock) = 50MHz
-- (2)
(slowed clock for the DI02 display multiplexer)
-(3)
(slowed clock for the state Machine)
-- (4) databuf (read or write data)
-(5) adrbuf (address of the device requested)
-(6) read '1' to executed
-(7) write '1' to execute
-(8) ready '1' means it is waiting for a command
->>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
->>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
->>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
--
signal busdir
signal ctl_cs
signal ctlwe
signal
--signal
begin
: STD-LOGIC;
-'1' read, '0' write
: STDLOGIC;
: STD-LOGIC;
: STDLOGIC;
; STDLOGIC_VECTOR(2 downto 0);
ctloe
ctl-adr
clk
stClk
cs
<= ctl cs;
we <= ctlwe;
oe <= ctloe;
write pins if busdir = '0'
data <= databuf when busdir = '0' else "ZZZZZZZZ";
--data <=
"11110000" when busdir = 'I' else "01010101";
--and databuf = "11110000"
-- data <= "11110000";
--adr <= "100" when adrbuf = "100" else
-"101" when adrbuf = "101";
adr <= adrbuf;
dclk <=
-clock for DI02 display multiplexer
--
library IEEE;
use IEEE.STDLOGIC_1164.ALL;
use IEEE.STD._LOGICARITH.ALL;
clk;
state machine to output lines
process(stBusCurr, stBusNext, read, write)
begin
case stBusCurr is
when stBusIdle =>
-idle state
-- read data
if read = '1' then
stBusNext <=
elsif write = '1' then
stBusNext <= stBusWrite;
else
stBusNext <= stBusIdle;
end if;
--
entity buscntrl is
port (--mclk
: in STDLOGIC;
- master clock
: in
LOGIC;
-slowed clock
stClk : in
-state machine
ock
reset : in STDLOGIC;
-- input
databuf : in
downto 0);
-data to read/write
adrbuf
: in STDLOGICVECTOR(2 downto 0);
-device to address
read
: in STD_LOGIC;
-'l to read data
write
: in
-'1'
to write data
ready
: buffer
-'1' when done,
or nothing is happening and it's
ready for use
-- external lines
data
: inout
downto 0);
adr
: out STD.LOGICVECTOR(2 downto 0);
cs
out STDLOGIC;
-chip select ('1' to write
/read)
out
write enable ('1' to latc
h data)
out
read enable ('1'
to read
data)
dclk
: out STDLOGIC
clk
STD
cl
STDLOGIC;
STDLOGICVECTOR(7
STDLOGIC;
STDLOGIC;
stBusRead;
output
<=
ctl-we <=
ctl-oe <=
ready <= '1';
busdir <=
--
ctl cs
STDLOGIC.VECTOR(7
---
STDLOGIC;
oe
STDLOGIC;
on lines...
'0';
'0';
'I';
'0';
when stBusRead =>
-read I
stBusNext <= stBusReadb;
output on lines...
ctl.cs <= 'l';
<= '0';
ctleoe <= '0';
ready <= '0';
busdir <= '1';
--
ctl-we
end entity;
architecture behaviour of busentrl is
bus states for writing and readii
type bstate is (stBusReset,
stBusIdle,
---
stBusRead,
--
Idle bus
First state of read cycle
--
First state of write cycle
when stBusRead_b =>
-read 2
stBusNext <= stBusReadc;
stBusRead_b,
stBusReadc,
stBusWrite,
--
stBusWriteb,
stBusWritec);
signals
signal
: bstate;
signal stBusNext : bstate;
--
stBusCurr
on
output
lines...
<= '1';
ctl-cs
--
ctlwe
<=
'0';
ctl_oe
<=
'1';
ready <= '0';
busdir <= '1';
databuf <= data;
when stBusRead_c =>
-read 3
if (read = '1') then
buscntrl.vhd
----
------
------
signal busdir : STD_LOGIC;
-'1' read, '0' write
signal ctlcs
: STDLOGIC;
signal ctlwe : STDLOGIC;
signal ctl-oe : STDLOGIC;
-- signal ctl-adr : STDLOGIC_VECTOR(2 downto 0);
begin
Entity: busontrl (main test FSM)
File: buscntrl.vhd
Date: 25-Mar-03
Abstract: bus controller... controls reading and writing
to the DI02 board.
INPUTS: (1) mclk (master clock) = 50MHz
(2)
(slowed clock for the DI02 display multiplexer)
(3) stClk (slowed clock for the state Machine)
(4) databuf (read or write data)
(5) adrbuf (address of the device requested)
(6) read '1' to executed
(7) write 'V' to execute
(8) ready '' means it is waiting for a command
->>>>>>>>>>>> >>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
->>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
->>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
clk
cs
we
oe
clk
--
ock
is
: in STDLOGIC;
: in STDLOGIC;
slowed
stClk : in STD_LOGIC;
STDLOGIC;
STDLOGICVECTOR(7 downto
input
master clock
--
state machine ol
: in
data
0);
-databuf : in
: in STDLOGICVECTOR(2 downto 0);
adrbuf
: in STD_LOGIC;
read
write
: in
ready
: buffer STDLOGIC;
or nothing is happening and it's ready for use
-- external lines
LOGICYVECTOR(7 downto 0);
data
: inout
: out STD_LOGICVECTOR(2 downto 0);
adr
-: out STDLOGIC;
/read)
-out
h data)
-out
LOGIC;
data)
dclk
: out STD_LOGIC
STD_LOGIC;
to read/write
-device to address
-'1' to read data
'1' to write data
--'1' when done,
-- state machine to output lines
process(stBusCurr, stBusNext, read, write)
begin
case st~usCurr is
when stBusIdle => -- idle state
-read data
if read = '1' then
stBusNext <= stBusRead;
elsif write = '1' then
stBusNext <= stBusWrite;
else
stBusNext <= stBusIdle;
end if;
output on lines...
<= '0';
ctl we <= '0';
--
ctlocs
STD
cs
STD_LOGIC;
oe
STD
ctl-oe
write enable ('1'
read enable
<=
ready <= '1';
busdir <=
chip select (' 1' to write
'0';
'0';
to latc
when stBusRead =>
-read 1
stBusNext <= stBusRead-b;
('1' to read
--
output on lines...
<= '1';
<= '0';
<= '0';
ready <= '0';
busdir <= '1';
ctlocs
otl_we
ctl-oe
end entity;
architecture behaviour of buscntrl is
bus states for writing and readir
type bstate is (stBusReset,
stBusIdle,
--stBusRead,
stBusReadb,
stBusReadc,
-stBusWrite,
stBusWriteb,
stBusWritec);
ctl oe;
write pins if busdir = '0'
data <= databuf when busdir = '0' else "ZZZZZZZZ";
-- data <=
"11110000" when busdir = '0' else "01010101":
--and databuf = "11110000"
-- data <= "11110000";
-- adr <= "100" when adrbuf = "100" else
-"101" when adrbuf = "101";
adr <= adrbuf;
dclk <= clk;
-clock for DIO2 display multiplexer
clock
reset
--
--
ctlocs;
ctl-we;
--
library IEEE;
use IEEE.STDLOGICl164.ALL;
use IEEE.STDLOGICARITH.ALL;
entity buscntrl
port (--mclk
<=
<=
<=
--
signals
signal stBusCurr : bstate;
signal stBusNext : bstate;
--
when stBusRead-b =>
-read 2
stBusNext <= stBusReadtc;
Idle bus
First state of read cycle
--
output on lines...
ctlcs
ctl-we
First state of write cycle
<=
<=
'1';
'0';
ctl-oe
--
<= '1';
ready <= '0';
busdir <= '1';
databuf <= data;
when stBusRead-c => -read 3
if (read = '1') then
buscntrl.vhd
Entity: buscntrl (main test FSM)
-File: buscntrl.vhd
-- Date: 25-Mar-03
-- Abstract: bus controller... controls reading and writing
-- to the DI02 board.
-INPUTS: (1) mclk (master clock) = 50MHz
-(2)
(slowed clock for the DI02 display multiplexer)
-(3) stClk (slowed clock for the state Machine)
-(4) databuf (read or write data)
-- (5) adrbuf (address of the device requested)
-(6) read '1' to executed
-- (7) write '1' to execute
-(8) ready '1' means it is waiting for a command
->>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
->>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
->>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
--
signal busdir
signal ctl-cs
signal ctl_we
signal
--signal
begin
: STDLOGIC;
-- '1' read, '0' write
:
: STDLOGIC;
: STDLOGIC;
: STDILOGICVECTOR(2 downto 0);
STDLOGIC;
ctloe
ctl-adr
clk
cs
<=
ctlocs;
we <= ctl_we;
oe <= ctloe;
-- write pins if busdir = '0'
data <= databuf when busdir = '0' else "ZZZZZZZZ";
--data <=
"11110000" when busdir = '0' else "01010101";
--and databuf = "11110000"
--data <= "11110000";
--adr <= "100" when adrbuf = "100" else
-"101" when adrbuf = "101";
adr <= adrbuf;
dclk <=
-clock for DI02 display multiplexer
library IEEE;
use IEEE.STDLOGIC-1164.ALL;
use IEEE.STDLOGICARITH.ALL;
clk;
state machine to output lines
process(stBusCurr, stBusNext, read, write)
begin
case stBusCurr is
when stBusIdle =>
-idle state
-read data
if read = '1' then
stBusNext <= stBusRead;
elsif write = '1' then
stBusNext <= stBusWrite;
else
stBusNext <= stBusIdle;
end if;
--
entity busontrl is
port (--mclk
: in STD_LOGIC;
-clk
: in STDLOGIC;
-slowed clock
stClk : in STDLOGIC;
ock
reset : in STD_LOGIC;
-- input
databuf : in STD_LOGIC_VECTOR(7 downto 0);
-data
adrbuf : in STDLOGICVECTOR(2 downto 0);
read
: in STDLOGIC;
write
: in STDLOGIC;
ready
: buffer STD_LOGIC;
or nothing is happening and it's ready for use
-external lines
data
: inout STDLOGIC VECTOR(7 downto 0);
adr
: out STD LOGICVECTOR(2 downto 0);
out STDLOGIC;
-/read)
out STD_LOGIC;
we
-h data)
out STDLOGIC;
-data)
dclk
: out STDLOGIC
cs
oe
master clock
--
state machine
cl
to read/write
device t o address
-'1' to r
data
-'1' to w rite data
-- '1' when done,
ead
output on lines...
<= '0';
<= '0';
<= '0';
ready <= 'l';
busdir <= '0';
--
ctlocs
ctl-we
ctl oe
chip select
'1'
to write
write enable ('1' to lato
read enable
('1' to read
when stBusRead =>
-read 1
stBusNext <= stBusReadb;
--
<=
<=
ctl-oe
ready <= '0';
busdir <=
architecture behaviour of buscntrl is
bus states for writing and readir
type bstate is (stBusReset,
stBusIdle,
--stBusRead,
stBusReadb,
stBusRead_c,
stBusWrite,
-stBusWritekb,
stBusWritec);
on lines...
'l';
'0';
'0';
output
<=
ctlocs
ctlwe
end entity;
'l';
--
-signals
signal stBusCurr :
signal stBusNext :
bstate;
bstate;
Idle bus
First state of read cycle
when stBusReadb =>
stBusNext <=
--
read 2
stBusReadc;
output on lines...
<= 'l';
<= '0';
<= 'I';
ready <= '0';
busdir <= 'l';
databuf <= data;
--
First state of write cycle
ctlocs
ctlewe
ctl-oe
when stBusRead_c =>
if (read = '1')
--
read 3
then
buscntrl.vhd
----
----
---
---
---
--
-'1' read, '0' write
signal busdir : STD-LOGIC;
signal ctl-cs : STDLOGIC;
signal ctlwe : STDLOGIC;
signal ctlcoe : STDLOGIC;
-- signal ctl-adr : STDLOGICVECTOR(2 downto 0);
begin
Entity: buscntrl (main test FSM)
File: buscntrl.vhd
Date: 25-Mar-03
Abstract: bus controller... controls reading and writing
to the DIO2 board.
INPUTS: (1) mclk (master clock) = 50MHz
(2) clk (slowed clock for the DI02 display multiplexer)
(3) stClk (slowed clock for the state Machine)
(4) databuf (read or write data)
(5) adrbuf (address of the device requested)
(6) read '1' to executed
(7) write '1' to execute
(8) ready '1' means it is waiting for a command
->>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
->>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
->>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
cs
we
oe
<=
<=
<=
ctl cs;
ctl we;
ctl_oe;
write pins if busdir = '0'
data <= databuf when busdir = '0' else "ZZZZZZZZ";
--data <=
"11110000" when busdir = '0' else "01010101":
--and databuf = "11110000"
--data <= "11110000";
--adr <= "100" when adrbuf = "100" else
-"101" when adrbuf = "101";
adr <= adrbuf;
dclk <=
-clock for DI02 display multiplexer
--
library IEEE;
use IEEE.STDLOGIC_1164.ALL;
use IEEE.STDLOGICARITH.ALL;
clk;
state machine to output lines
process(stBusCurr, stBusNext, read, write)
begin
case stBusCurr is
when stBusIdle => -- idle state
-- read data
if read = '1' then
stBusNext <= stBusRead;
elsif write = '1' then
stBusNext <= stBusWrite;
else
stBusNext <= stBusIdle;
end if;
--
entity buscntrl is
: in STDLOGIC;
port (--mclk
: in STD_LOGIC;
clk
-slowed clock
: in STD_LOGIC;
ock
: in STDLOGIC;
reset
-- input
-- data
databuf : in STD_LOGICVECTOR(7 downto 0);
downto 0);
adrbuf
: in
read
: in STDLOGIC;
: in STDLOGIC;
write
ready
: buffer STDLOGIC;
or nothing is happening and it's ready for use
-- external lines
: inout STD_LOGICVECTOR(7 downto 0);
data
downto 0);
adr
: out
-: out STDLOGIC;
/read)
out STDLOGIC;
we
h data)
out STDLOGIC;
data)
dclk
: out STD_LOGIC
- master clock
stClk
STDLOGICVECTOR(2
cs
--
cl
to read/write
-- device to address
-'1' to read data
-- '1' to write data
-'1' when done,
ctlcs
ctl we
ctl-oe
STD_LOGICVECTOR(2
chip select
: bstate;
: bstate;
('1' to write
write enable ('1'
read enable
architecture behaviour of buscntrl is
-- bus states for writing and reading
type bstate is (stBusReset,
stBusIdle,
-stBusRead,
-stBusRead.b,
stBusReadc,
stBusWrite,
-stBusWrite-b,
stBusWritec);
output on lines...
<= '0';
<=
<= '0';
ready <= '1';
busdir <= '0';
--
end entity;
-signals
signal stBusCurr
signal stBusNext
state machine
Idle bus
First state of read cycle
('1'
to latc
to read
when stBusRead =>
-read 1
stBusNext <= stBusReadb;
--
output
<=
ctl.we <=
ctloe <=
ready <= '0';
busdir <=
etlcs
--
state of write cycle
'l';
read 2
-when stBusRead-b =>
stBusNext <= stBusReadc;
output
ctlecs
First
on lines...
'1';
'0';
'0';
ctluwe
<=
<=
on
lines...
'1';
'0';
ctl-oe <= '1';
ready <= '0';
busdir <= '1';
databuf <= data;
when stBusRead-c => -read 3
if (read = '1') then
Appendix D
Probes
Several different versions of the probe and matching network were created. There
were numerous unsuccessful versions of the probe before a final design was settled
upon. The following pictures are successive interations of the probe. All the probes
follow the schematic shown in Figure 6-2, section 6.2.1.
A mechanical diagram (done in Omax) of the final probe is also included. The
final probe was constructed using a copper cylinder and 0.25 inch copper plates. The
patterns were cut with a water jet. The probe was welded together with silver solder.
199
Figure D-1: A die-cast Al RF box is used as the container for the probe and tuning
and matching capacitors. Large copper sheet metal is used as the wiring between
components. Sheet metal is used to lower parasitic inductance. The probe holder is
a piece of paper rolled into a cylinder. The coil is wrapped around the paper. The
resonance frequency is 4.649MHz, with C1 = 260pF, C2 = 760pF, and L, = 1.2pH.
200
Figure D-2: The second probe utilizes similar construction methods as the first.
The major difference is variable air capacitors are used as the tuning and matching
capacitors. Use of the variable air capacitors turns out to be a poor design choice,
because the air capacitors have a lot of undesired capacitively coupling to other
components. The resonance frequency was not attainable.
201
Figure D-3: The third probe is the same design as the first, except the length of the
coil is increased to maximize the Q. The length of the coil is the same as the diameter
of the coil, 0.78 inches. The resonant frequency is 4.649MHz with C1 = 26pF, C2 =
95pF, and L, = 9.6pH.
202
Figure D-4: The last probe is shown here with a 9.7pH coil. The coil slides over a
0.78 inch test tube which fits in the center of the copper cylinder. The tuning and
matching capacitors are described in section 6.2.1.
203
Figure D-5: The mechanical drawings (completed in the software Omax) for the probe
(in Figure D-4) is show with lengths in units of inches.
204
Appendix E
Class E amplifier
This appendix contains the relevant schematic, in Protel, for the Class E amplifier.
The design shown is tuned for 4.638MHz. The PCB layout is also shown in Figure
E-2. Lastly the waveforms from the simulations are shown in Figure E-3.
205
2
3
CQypass
100n
4
Vcc
22V
1il
54u
V Oxt
A
Ot
1.8u
?cp IOU
a
Rload
10.0
Figure E-1: Protel schematic of a Class E amplifier tuned at 4.638MHz. A IRF51OS
power transistor is used in the design.
206
............ ........
U
UCC
In
O
S
n
-
(;I
019
027
.
8D29
D28
022
022
dUpower
U
CouA
1
I
.1
I
*
_
Figure E-2: Protel PCB layout for the Class E amplifier. The board is made to fit
into a NIM box. Additional debugging pins and thru holes (vias) are added to the
board. The back-to-back pin diode switches are incorporated into the design of the
PCB.
207
5.750us
6.000us
6.750uS
6.500us
6.250us
7.000us
7.250us
voltb
0.000 V
V
v.0u190.00
tp
-10.00V
30.00OV
outpu
._______
.......
..
____
______________-00
Figure E-3: Simulations of the Class E amplifier are completed in Protel. Here, the
voltage at the gate of the transistor (volt-b) is plotted along with the voltage at the
drain (v-out) and the voltage across the resistor (output).
208
Bibliography
[BB48]
J. Bardeen and W.H. Bratain. The Transistor, A Semi-Conductor Triode. Phys. Rev., 64:230, June 1948.
[Ben82]
P. Benioff. Quantum mechanical models of Turing machines that dissipate no energy. J. Theor. Phys., 21(182):177, 1982.
[BGJM94]
M.L. Buess, A.N. Garroway, P. JPYJ, and J.B. Miller. Pure 14N NQR
of large specimens. In: Proceeding of the XXVII Congress Ampere, 1:58,
1994.
[BHP46]
F. Bloch, W.W. Hansen, and M. Packard. Nuclear induction. Phys.
Rev., 69:127, 1946.
[BM75]
A. Bohr and B.R. Mottelson.
Nuclear structure. Volume II. Nuclear
deformations. W.A. Benjamin Inc., 1975.
[CFH97]
D.G. Cory, A.F. Fahmy, and T.F. Havel. Ensemble quantum computing
by NMR spectroscopy. Proc. Natl. A cad. Sci., 94:1634-1639, 1997.
[CGK98]
I.L. Chuang, N. Gershenfeld, and M. Kubinec. Experimental implementation of fast quantum searching. Phys. Rev. Lett., 18(15):3408-3411,
1998.
[CVZ+98]
I.L. Chuang, L.M.K. Vandersypen, X.L. Zhou, D.W. Leung, and
S. Lloyd. Experimental realization of a quantum algorithm. Nature,
393:143-146, 1998.
209
[Deh50]
H.G. Dehmelt.
Pure quadrupole resonance in solids.
Naturwiseen-
schaften, 31:111, 1950.
[Deu85]
David Deutsch.
Quantum Theory, the Church-Turing Principle and
the Universal Quantum Computer.
Proc. R. Soc. of London A.,
400(1818):97-117, 1985.
[DH58]
T.P. Dasand and E.L. Hahn.
Nuclear Quadrupole Resonance Spec-
troscopy. London LtD., 1958.
[Dig02]
Digilent. Digilent 2E manual. 2002.
[DiVOG]
David. P. DiVincenzo. The physical implementation of quantum computation. Fortschritteder Physik, 48:771-80, 2000.
[DJ92]
D. Deutsch and R. Jozsa. Rapid solution of problems by quantum computation. Proc. R. Soc. of London A., 439:553, 1992.
[EBW87]
R.R. Ernst, G. Bodenhausen, and A. Wokaun. Principles of Nuclear
Magnetic Resonance in One and Two Dimensions. Oxford Sci. Pub.,
1987.
[Fey8l]
R.P. Feynman. Simulating physics with computers. In Inter. J. Theor.
Phys., volume 21, page 486, 1981.
[Fey82]
Richard P. Feynman.
Simulating physics with computers.
Int. J. of
Theor. Phys., 21(6&7):467, 1982.
[FGMS02]
G.B. Fuman, S.D. Goren, V.M. Meerovich, and V.L. Sokolovsky. Two
qubits in pure nuclear quadrupole resonance. Journal of Physics: Condensed Matter, 14:8715-8723, 2002.
[FMSR99]
G. Fisher, E. MacNamara, R.E. Santini, and D. Raftery. A versatile
computer-controlled pulsed nuclear quadrupole resonance spectrometer.
Review of Scientific Instruments, 70(12):4676-4681, 1999.
210
[FR86]
Eiichi Fukushima and Stephen B.W. Roeder. Experimental Pulse Nmr:
a Nuts and Bolts Approach. Perseus Publishing, 1986.
[Fre97]
R. Freeman. Spin Choreography. Spectrum Oxford, 1997.
[GAPA99]
J.A. Gupta, D.D. Awschalom, X. Peng, and A.P. Alivisatos.
Spin-
coherence in semiconductor quantum dots. Phys. Rev. B, 59:R10421R10424, 1999.
[GBM+01]
A.N. Garroway, M.L. Buess, J.B. Miller, B.H. Suits, A.D. Hibbs, G.A.
Barrall, R. Matthews, and L.J. Burnett.
Remote sensing by nuclear
quadrupole resonance. IEEE Trans, 39:1108-1118, 2001.
[GBYM93]
A.N. Garroway, N.L. Buess, J.P. Yesinowski, and J.B. Miller. Narcotics
and explosives detection by 14N pure NQR. SPIE Substance Detection
Systems, 2092:318-327, 1993.
[GC97a]
N. Gershenfeld and I.L. Chuang. Bulk spin resonance quantum computation. Science, 275:350-356, 1997.
[GC97b]
N. Gershenfeld and I.L. Chuang. The Usefulness of NMR Quantum
Computing: Response. Science, page 1689, September 1997.
[Gru00]
Josef Gruska. Quantum Computing. McGraw Hill, 2000.
[JM98]
J.A. Jones and M. Mosca. Implementation of a quantum search algorithm on a nuclear magnetic resonance quantum computer. Nature,
393(6683):344, 1998.
[JMH98]
J.A. Jones, M. Mosca, and R.H. Hansen. Implementation of a quantum
search algorithm on a nuclear magnetic resonance quantum computer.
Nature, 393:6683, 1998.
[Kan98]
B.E. Kane. A silicon-based nuclear spin quantum computer. Nature,
393(6681):133-137, 1998.
211
[KMW02]
D. Kielpinski, C. Monro, and D.J. Wineland. Architecture for a largescale ion-trap quantum computer. Nature, 417:709-711, 2002.
[KOB70]
P.K. Kadaba, D.E. O'Reilly, and R. Blinc. Physics of Solids, 42:855,
1970.
[LBF98]
N. Linden, H. Barjat, and R. Freeman.
An implementation of the
Deutsch-Jozsa algorithm on a three-qubit NMR quantum computer.
Chem. Phys. Lett., 296:61-67, 1998.
[LCQ+97]
E. Lau, K.W. Chiu, J. Qin, J. Davis, K. Potter, and D. Rutledge.
High-Efficiency Class-E Power Amlifiers - Part 1. QST: Amateur Radio,
page 42, May 1997.
[Lee02]
Y.K. Lee. Spin-1 Nuclear Quadrupole Resonance Theory with Comparisons to Nuclear. Magnetic Resonance Concepts in Magnetic Resonance,
14(3):155-171, 2002.
[LT02]
R. Lerdorf and K. Tatroe. Programming PHP. O'Reilly, 2002.
[Mag99]
Yael G. Maguire. Towards a Table Top Quantum Computer. Master's
thesis, MIT, 1999.
[MNAU02]
J.M. Martinis, S. Nam, J. Aumentado, and C. Urbina. Rabi Oscillations
in a Large Josephson-Junction Qubit. Phys. Rev. Lett., 89(11):1-4, 2002.
[Moo65]
Gordon Moore. Cramming more components onto integrated circuits.
Electronics, 38(8), 1965.
[NCOO]
M. Nielson and I.L. Chuang. Quantum Computation and Quantum Information. Cambridge Press, 2000.
[OMB67]
T. Oja, R.A. Marino, and P.J. Bray. 14N nuclear quadrupole resonance
in the ferroelectric phase of sodium nitrite. Phys. Lett. A, 26:11, 1967.
212
[PB76]
G. Petersen and P.J. Bray. 14N nuclear quadrupole resonance and relaxation measurements of sodium nitrite. Jour. Chem. Phys., 64(2):522530, 1976.
[Pet75]
G.L. Petersen. Pusled Nuclear Quadrupole Resonance Instrumentation
and Study of N14 Spectrum and Relaxation in Sodium Nitrite. PhD
thesis, Brown University, 1975.
[PML94]
T.L. Peck, R.L. Magin, and P.C. Lauterbur. NMR microspectroscopy using 100micro planar RF coils fabricated on gallium arsenide substrates.
IEEE Trans. on Biomedical Eng., 1994.
[Pou50]
R.V. Pound. Nuclear electric quadrupole interaction in crystals. Phys.
Rev., 79:685-702, 1950.
[Pre98]
J. Preskill. Physics 229: Advanced Mathematical Methods of Physics Quantum Computation and Information. California Institue of Technology, 1998.
[PTP46]
E.M. Purcell, H.C. Torrey, and R.V. Pound. Resonance absorption by
nuclear magnetic moments in a solid. Phys. Rev., 69:37-38, 1946.
[PW51]
R.V. Pound and G.D. Watkins. An improved rf spectrometer. Rev. Sci.
Instrum., 82:343, 1951.
[Seg77]
E. Segre. Nuclei and particles: An introduction to nuclear and subnuclear physics. W.A. Benjamin Inc, 1977.
[Sho94]
Peter W. Shor. Algorithms for quantum computation: discrete logarithms and factoring* Proceedings of the 35th Annual Symposium on
Foundations of Computer Science, page 124, 1994.
[Sho97]
Peter W. Shor.
Polynomial-time algorithms for prime factorization
and discrete logarithms on a quantum computer.
26(5):1484-1509, 1997.
213
SIAM J. Comp.,
[SNFY58]
S. Sawada, S. Nomura, S. Fujii, and I. Yoshida.
Ferroelectricity in
NaNO2. Phys. Rev. Lett., 1:320, 1958.
[Sok75]
N.O. Sokal. Class E-A new class of high-efficiency tuned single-ended
switching power amplifiers. IEEE Jour. Solid-State Cir., 10(3):168-176,
June 1975.
[Sok98]
N.O. Sokal. Class E High-efficiency Power Amplifiers, from HF to Microwave. IEEE, 0-7803-4471-5:1109-112, 1998.
[Sok0O]
N.O.
Sokal.
Class
E Switching-mode
High-efficiency
Tuned
RF/Microwave Power Amplifier: Improved Equations. 1EE MTT, pages
779-781, 2000.
[Ste03]
M. Steffen. A prototype quantum computer using nuclear spins in liquid
solution. PhD thesis, Stanford, 2003.
[SvDH+03a] M. Steffen, W. van Dam, T. Hogg, G. Breyta, and I.L. Chuang. Experimental implementation of an adiabatic quantum optimization algorithm.
Phys. Rev. Lett., 90:067903, 2003.
[SvDH+03b] M. Steffen, W. van Dam, T. Hogg, G. Breyta, and I.L. Chuang. Experimental implementation of an adiabatic quantum optimization algorithm.
Phys. Rev. Lett., 90:067903, 2003.
[Tsa99]
K.C. Tsai. A 1.9GHz 1W CMOS Class E Power Amplifier for Wireless
Communications. IEEE Jour. Solid-State Cir., 34(7):962, July 1999.
[VNMO1]
Varian VNMR. VNMR Pulse Sequences. Varian, Inc., 2001.
[VSB+00]
L.M.K. Vandersypen, M. Steffen, G. Breyta, C.S. Yannoni, R. Cleve,
and I.L. Chuang. Experimental realization of Shor's quantum factoring
algorithm using nuclear magnetic resonance.
2000.
214
Nature, 76(5):646-648,
[VSB+01]
L.M.K. Vandersypen, M. Steffen, G. Breyta, C.S. Yannoni, R. Cleve,
and I.L. Chuang. Experimental realization of an order-finding algorithm
with an NMR quantum computer. Phys. Rev. Lett., 85(25):2480-2482,
2001.
[War97]
W.S. Warren. The Usefulness of NMR Quantum Computing. Science,
page 1688, September 1997.
[WPBM93]
X. Wu, D.A. Patterson, L.G. Butler, and J.B. Miller.
band
nuclear-magnetic-resonance
and flexible pulse programmer.
A broad-
spectrometer-digital-phase-shifting
Review of Scientific Instruments,
64(5):1235-1238, 1993.
[WSF88]
E.A. Wachter, E.Y. Sidky, and T.C. Farrar. Enhanced state-machine
pulse programmer for very-high-precision pulse programming. Review
of Scientific Instruments, 59(10):2285-2289, 1988.
215