Document 10778525
advertisement

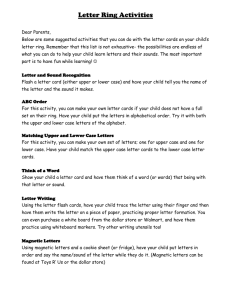
Rate dependent finite deformation of magneto-active polymers Yi Hana, Wei Hong*a, LeAnn E Faidleyb a Department of Aerospace Engineering, Iowa State University, Ames, IA, USA b Department of Mechanical Engineering, Iowa State University, Ames, IA, USA ABSTRACT Magneto-active polymers (MAPs), composed of polymer matrices and magnetic filler particles, are smart materials that deform quickly in an external magnetic field. The ability to produce large deformation of MAPs makes these materials promising for actuators and sensors. Due to the viscoelasticity of the polymer matrices, MAPs usually demonstrate ratedependent dynamic properties. However, very few models of coupled magnetic field and viscoelasticity in MAPs exist in the literature, and even fewer are capable of reliable predictions. Starting from nonequilibrium thermodynamics, a field theory is developed to fully couple the finite-deformation viscoelasticity and magnetostatics of MAPs. The theory provides a guideline for experimental characterization of MAPs, and most material laws are readily applicable in this framework. A specific material model is prescribed for an idealized MAP. As demonstrations, numerical examples are implemented on the responses of the MAP in response to both uniform and nonuniform magnetic fields. In the nonviscous limit, our theory recovers a model for elastic MAPs, and is capable of capturing instability phenomena observed in the experiments. Keywords: rate dependent; finite deformation; magneto-active polymers *whong@iastate.edu 1. INTRODUCTION Composed of cross-linked polymer networks and magnetic filler particles, magneto-active polymers (MAPs) are capable of large and recoverable deformation, and more significantly they can respond to an external magnetic field quickly and quietly.1-7 The unique performances have made MAPs promising materials in many applications, such as actuators,3-5 drug delivery,6-7 vibration absorbers and damping components.8-9 When exposed in a magnetic field, the filler particles in a MAP are magnetized and their magnetic moments are realigned. The local gradient of the magnetic field will drive the motion of each magnetic particle to reduce the magnetostatic energy. The motion of the particles and the deformation of the polymer matrix collectively minimize the total potential energy of the system, with both elastic and magnetic contributions included. Based on their microstructures, MAPs can be categorized into isotropic MAPs and anisotropic MAPs. In an isotropic MAP, the magnetic particles are randomly dispersed, and mechanical properties are usually non-directional.11-12 Ferrogel is a type of isotropic MAP with typical deformation patterns being elongation and contraction, rotation and torsion, or coiling and bending.3-5,12 On the other hand, the particles in anisotropic MAPs13-16 are aligned into chain structures by applying a magnetic field during the curing processes. The mechanical properties of anisotropic MAPs depend strongly on the orientations of magnetic field and chain structures.14,16 In addition to the orientations, the magnetizations, volume fraction and size of particles also have significant effect to the properties of MAPs.17-19 Recently, four classes of MAPs have been developed based on different permutation of particle alignments and magnetizations.18 The current paper will focus on the magnetic-field-induced finite deformation of isotropic MAPs. A great amount of research has been carried out in the past decades on modeling the coupled behavior of deformable magnetic materials. In a local field, magnetic dipole interactions are frequently used to explain the magnetorheological effect20-22 (the modulus of a MAP increases in the presence of an external magnetic field). In early continuum mechanics approaches, the magnetic and mechanical fields are solved separately. The field induced forces and moments are considered as body forces.2 More recently, fully coupled nonlinear field theories have been developed,23-28,48 as reviewed in Ref. 29. In these theories the specific material properties are described by free-energy functions of deformation and magnetic field. The theories have also been implemented numerically to handle boundaryvalue problems with complex geometries. 25-26 In addition to the elastic characteristics, most polymers exhibit viscoelastic behavior due to the conformation changes of polymer chains.46 The rate-dependent deformations of MAPs have also been demonstrated in various experiments.11-12,15-17,30-33 However, very little research has been carried out on modeling the viscoelastic behaviors of magneto-active polymers. Linear viscoelastic models such as Maxwell and Kelvin-Voigt models have been used to capture the dynamic responses of MAPs in cyclic magnetic fields.12,18,34 However, these simple rheological models are limited to small deformations in one dimension. The motivation of this paper is to provide a three dimensional model which can fully couple the magnetic field and large viscoelastic deformation in MAPs. The current paper is constructed as follows. In Section 2, following the approaches recently used for elastic36 and viscoelastic dielectrics,37-38 we define the stress and magnetic fields through an energy approach similar to the principle of virtual work. Then the governing equations for the coupled viscoelastic MAP is derived based on the principles of non-equilibrium thermodynamics. Section 3 proposes a simple material model and kinetic evolution law for three dimensional viscoelasticity. Finally, numerical calculations of MAP samples in response to external magnetic fields are demonstrated in Section 4 as an application of the theory. 2. A NONEQUALIBRUIM THERMODYNAMIC THEORY 2.1 Field equations Following an approach similar to that in theories of electro-active polymers,36,38 this section presents a field theory of magneto-active polymers. Fig.1 illustrates two states of a MAP, we take the undeformed MAP in the absence of any magnetic or mechanical load as the reference state (Fig. 1a), and name each particle using its coordinate X in the reference state. Let dV (X ) be a volume element, and dA(X ) be the area of a surface element. In the current state at X moves to a place with coordinate x(X, t ) . Denote the deformation gradient by F(X, t ) = ∇x . In the current paper, the gradient operator ∇ , the divergence operator ∇ ⋅ , and the curl operator ∇ × , all indicate time t , the particle differentials with respect to the coordinates in the reference state. a b A a L I (X , t ) l MAP P Reference State Current State Figure 1. A cylinder MAP loaded by a current resourced magnetic field the undeformed state, the elastomer has thickness homogeneously to thickness l and area a . L and area A. B(I ) and a mechanical load P . (a) In (b) In the current state, the elastomer deforms b(X, t )dV and that on a surface as t (X, t ) . Define the tensor of nominal stress (i.e. the first kind of Piola-Kirchhoff stress), P(X, t ) , such that In the reference state, we denote the mechanical force in the volume as ∫ P ⋅ ∇ξdV = ∫ b ⋅ ξdV + ∫ t ⋅ ξdA Ω Ω ∂Ω (1) holds true for arbitrary test field ξ (X ) . The inertial forces considered in a dynamic process can be included into the body force. Eq. (1) becomes the principle of virtual work when ξ is taken to be a virtual displacement field. The stress defined herein recovers the common definition in a state of thermodynamic equilibrium. Applying the divergence theorem to the left-hand side of Eq. (1), and integrating by parts, one would easily obtain a mathematically equivalent definition of the nominal stress: ∇ ⋅ PT + b = 0 in the volume, and (P − (2) ) − P+ ⋅ N = t (3) on an interface. N is the unit vector normal to the interface between media labeled as “+” and “–” in the reference state, pointing towards the medium “+”. In a general MAP system, a conductive part such as electro-magneto coil is always used to produce the magnetic field (Fig. 1b). For simplicity, we neglect the electric resistance and the elastic stiffness of the conductive phase, and consider the material to be homogenous. Similar as in the definition of nominal stress, we write the ~ ~ j (X, t ) and the interfacial current density as J (X, t ) , both measured with respect to the ~ undeformed geometry. Define the nominal magnetic field, H (X, t ) , such that ~ ~ ~ (4) ∫ (∇ × η) ⋅ HdV = ∫ η ⋅ j dV + ∫ η ⋅ JdA volumetric current density as Ω Ω ∂Ω holds true for arbitrary test field η(X ) . Upon application of the divergence theorem, Eq. (4) yields an equivalent definition of the nominal magnetic field in a differential form: in the volume and ~ ~ ∇×H = j (5) ( (6) ) ~ ~ ~ N × H− − H+ = J on an interface. Eqs. (5) and (6) are known as Ampère's circuit law. Similar to defining an electric field,36 we assume that at time t , the material particle X has magnetic potential ~ ~ ~ ~ A(X, t ) . The nominal magnetic induction is defined as B = ∇ × A . Utilizing the definitions of H , we may further simplify the work done by the current sources (4) into a volumetric integral over the whole domain: ∫ (∇ × δA )⋅ HdV . ~ ~ (7) The soft nature of magneto-active polymers usually results in large deformation, and the geometries in the current and reference states differ significantly. The quantities defined here are nominal fields in a Lagrange description. When needed, equations in terms of the nominal quantities can be easily rewritten in the current state using the geometric relations between the nominal and true fields, such as ~ ~ F⋅ j P ⋅ FT F⋅B ~ ~ , j= , A⋅F = A, B = , and H ⋅ F = H , σ= det F det F det F (8) where σ , j , A , B , and H are the true stress, true current density, true magnetic potential, true magnetic induction, and the true magnetic field, respectively. 2.2 Nonequilibrium thermodynamics Following the usual approach in finite-deformation viscoelasticity,39 we imagine an intermediate state between the reference state and the current state. The intermediate state in which the polymer network is locally relaxed has a F i (X, t ) , and the current state with respect to the intermediate state has a reversible e (elastic) deformation gradient, F (X, t ) . We introduce the multiplicative decomposition of the deformation gradient: viscous deformation gradient, F = Fe ⋅ Fi . (9) The magnetization of filler particles may involve two distinct processes: a) each particle changes its magnetization direction without any rotation relative to the network; and b) each particle maintains its magnetization along an easy-magnetization axis, but rotates against the matrix towards the direction of applied field. The first process dominates in soft-magnetic particles, such as carbonyl iron particles,12,14 which are often used in MAPs. The second process, which takes place in hard-magnetic particles, such as barium hexaferrite powder,18 dissipates energy and the rate of the process may be dependent on the viscoelastic matrix. In the current paper, we only consider the soft-magnetic materials, and assume that the magnetic domain switch reaches equilibrium much faster than the relaxation of matrix. Therefore, the magnetic energy is always in equilibrium and independent of the viscous deformation gradient Fi . In the current state, let W be the Helmholtz free energy of the material per unit reference volume. For a general inelastic material, the free energy in an equilibrium state differs from that in a non-equilibrium state. To distinguish them, following Reese and Govindjee,40 we introduce the equilibrium Helmholtz free-energy density W EQ (F, B ) , which is fully determined by the deformation gradient and the nominal magnetic induction. On the other hand, we assume that the non-equilibrium Helmholtz energy, depends only on the elastic deformation between the ( ) W − W EQ ≡ W NEQ F e . Since the irreversible deformation is more i suitable for characterizing a non-equilibrium state, here we take the corresponding deformation gradient F as an relaxed intermediate state and the current state, internal state variable, and write the total Helmholtz free energy density as ( ) ( ) ( ) −1 ~ ~ W F, F i , B = W EQ F, B + W NEQ F ⋅ F i . (10) To handle more general cases when filler particles exhibit significant magnetic anisotropy and the spatial rotation of particles are important, one may extend the current model by accounting for the dependence on magnetic induction in the non-equilibrium free energy density ~ B W NEQ . Thermodynamics requires that the increase in the free energy never exceeds the total work done, namely, ~ ~ δW ≤ P : δF + H ⋅ δB . (11) To make the inequality meaningful, here δf means the small change of the quantity f with respect to time. The inequality holds true on any material particle for any process, where the equal sign takes place only when the process is reversible, i.e. the system is locally in equilibrium. It also indicates that the thermodynamic equilibrium state of a material particle is fully determined by the deformation gradient and the magnetic induction. Inserting Eq. (10), we rewrite the thermodynamic inequality (11) as δW δW ~ ~ δW − P : δF + ~ − H ⋅ δB + i δF i ≤ 0 . ∂F ∂F ∂B (12) Inequality (12) must hold for all processes, including reversible processes in which the system is in in mechanical and magnetostatic equilibrium, δF i = 0 , and an equal sign should be taken. We thus assume that ~ ~ ∂W F, F i , B ~ ∂W F, F i , B , H= , P= ~ ∂F ∂B ( ) ( ) (13) even for general irreversible processes. Consequently, inequality (12) becomes ( ~ δW F, F i , B ∂F i )δF i ≤ 0, (14) which indicates that the energy of the system is only dissipated through the inelastic deformation. This thermodynamic inequality may be satisfied by adopting a kinetic law of evolution, 37,41 ( ) i ~ F i = −M : δW F, F , B . ∂F i (15) Here M is a positive-definite mobility tensor, which may be dependent on various state variables. Equations (9), (13) and (15), together with the definition of state variables in Section 2.1, constitute a closed system for the analysis of the coupled viscoelastic magneto-active polymers. 3. IDEAL VISCOELASTIC MAP To apply the nonlinear field theory developed in previous section, one needs to specify the Helmholtz free-energy ( i ~ ) function W F, F , B and the mobility tensor M . In the past decades, continuous studies have been carried out to characterize the finite deformation42-43 and viscoelastic behavior38,40-41,44-47 of polymer materials. Possible forms of the EQ ( ~) equilibrium free-energy function W F, B that couples magnetic field and finite deformation have also been studied recently.23-25,29 To give a demonstration and for qualitative studies, we will construct a simple model. We assume that the free-energy of MAPs consists of two parts: the stretching free energy of polymer networks from both equilibrium state and non-equilibrium state, and the magnetization energy which only depends on the true magnetic induction, ( ) ( ) −1 ~ W F, F i , B = WsEQ (F ) + WsNEQ F ⋅ F i + Wm (B ) . For simplicity, we assume that the MAP is an ideal soft-magnetic material: the remnant magnetization is always zero in absence of external magnetic field, and the permeability in the current state is deformation-independent. Thus the magnetization energy is where µ Wm (B ) = 1 B⋅B, 2µ is the homogeneous magnetic permeability of the material. We assume the free-energy of stretching to be 1 WsEQ (F ) = G EQ F : F , where G EQ is the equilibrium or long-term 2 NEQ Similarly, we assume the non-equilibrium free-energy to be Ws (F ) = 1 G NEQ F e : F e , where G NEQ is 2 purely entropic with Gaussian statistics, modulus.42 the non-equilibrium modulus. Fig. 2 shows a 1-D rheological model analogous to the ideal viscoelastic material.45 The spring in the top represents the pure elastic part of material, with a equivalent modulus G EQ . The spring-dashpot in the bottom represents the inelastic part, with a equivalent modulus G and a viscosity η . The elastic energy stored in the top spring recovers the free energy of stretching in the equilibrium state, while the elastic energy stored in the bottom spring recovers the stretching energy of the polymer networks in the nonequilibrium state. Finally we have the Helmholtz free energy function as NEQ ( ) ( )( ) ( )( ) −1 −1 1 1 ~ 1 ~ ~ W F, F i , B = G EQ F : F + G NEQ F ⋅ F i : F ⋅ F i + F⋅B ⋅ F⋅B . 2 2 2µ (16) In the current paper, the material is assumed to be incompressible, with both elastic and inelastic deformations being volume-conservative, namely det F = det F i = det F e = 1 . (17) Inserting the free-energy function (16) into (13), one obtains the following constitutive relations: ( P = G EQ F + G NEQ F ⋅ F i ⋅ F i T ) −1 + 1 µ ~ 1 ~ ~ ~ F ⋅ B ⊗ B − pF −T , H = FT ⋅ F ⋅ B , (18) µ where p is a hydrostatic pressure introduced by the incompressibility constraint (17). A combination of (8) and (18) gives the constitutive relations in terms of true quantities: −1 σ = G EQ F ⋅ FT + G NEQ F ⋅ F i ⋅ FT + 1 µ B ⊗ B − p1 , H = B µ , (19) where 1 represents the second rank identity tensor. The first term on the right-hand side of Eq. (19) is the true stress from the elastic deformation while the second term is from the inelastic deformation. The third term is the deviatoric part of magnetic Maxwell stress, while its hydrostatic part in the usual form is absorbed in the arbitrary pressure p . G EQ G NEQ η Figure 2. A 1-D rheological model for a viscoelastic magneto-active polymer. To specify the evolution law for the inelastic deformation, we assume the viscous property of the material to be isotropic in the current state, so that the inverse of the mobility tensor takes the form 1 M −1 = η 14 − 1 ⊗ 1 . 3 (20) Here 1 is the fourth rank symmetric identity tensor. Then Eq. (15) recovers a usual constitutive model of viscous material,38,48 Li = M : σ NEQ , (21) e −1 ⋅ F − F ⋅ F = F ⋅ F ⋅ F , and σ is where L is the inelastic part of the covariant velocity gradient, L = F the second term in the right-hand side of Eq. (19). When a constant viscosity η is used, the inelastic behavior of the material resembles a Newtonian fluid. Finally, Eqs. (16)-(20) constitute the basic equations for the analysis of magnetoactive polymers. A finite element numerical approach has been implemented to solve these equations with different boundary values.48 i i −1 e e i −1 NEQ 4. NUMERICAL EXAMPLES This section applies the above model to viscoelastic MAPs subject to external magnetic fields, as a demonstration of the theoretical framework developed in the current paper. To simplify the expressions, we will normalize all the stresses G = G EQ + G NEQ . The magnetic field and induction are µ0G , where µ 0 is the magnetic permeability of air. Instead of and energy densities by the instantaneous modulus, normalized respectively as ~ ~ H µ 0 G and B using a specific value for the viscosity, we normalize the time by η two dimensionless parameters: the relative permeability the instantaneous modulus, χ =G EQ µ r = µ µ0 G . The material model described in Section 3 has and the ratio between the equilibrium modulus and G . The parameter χ characterizes the fraction of the polymer network that has χ = 1 , and becomes a viscous rate-independent deformation.45 The viscoelastic material reduces to purely elastic when fluid when χ = 0. In a magnetic field, each filler particle is magnetized and can be considered as a magnetic dipole, and the motion of a magnetic dipole is only driven by the gradient of external field. Thus in a uniform magnetic field with zero gradient throughout the entire region, the dipole moments are aligned without deforming the matrix. On the other hand, since MAPs have higher magnetic permeability than air, the difference between the internal and external magnetic fields will result in an effective deviatoric stress and deform the MAPs. Previous studies have shown that a cylindrical MAP sample in a uniform magnetic field will be elongated,48 though the magnitude of the elongation is much smaller than that in a nonuniform field.2-3 As the first example, we will look at the relaxation test of viscoelastic MAPs in a uniform magnetic field. Fig. 3 illustrates a basic experiment of relaxation of a sample. At time zero, the sample is subject to a sudden stretch δl , and subsequently the stretch is held constant. The corresponding stress rises instantaneously, and then relaxes as a function of time. Ultimately, the sample approaches a new equilibrium state, and the stress reduces to a lower level. The characteristic time for this process is known as the viscoelastic relaxation time, which is determined by the ratio of the viscosity and shear modulus in the nonequilibrium state (described in Section 3), η b 0.3 δl L B /G Normalized σ stress σ G a G NEQ . η G NEQ 0.1 MAP sample ~ H µ0 G = 0 Relaxation time 0.2 0 2 4 0.2 0.1 6 tη /G Normalized time tG η 8 10 Figure 3. (a) Relaxation of a viscoelastic MAP sample in a uniform magnetic field. (b) The stress is a function of time, and asymptotes to a lower lever when the material approaches an equilibrium state. We choose a cylindrical sample with representative material properties: modulus G = 10 kPa, relative magnetic permeability µ r = 2 , and a moderate viscoelastic parameter χ = 0.5 . All the geometric parameters are normalized by the height of the sample, L . The diameter of cylinder is chosen as d L = 1 , and the applied stretch is set to be δl = 0.1L . A 3-D axial-symmetry finite element model is established in the numerical calculation. For a quasi-uniform field results in an extension deformation in the direction of the applied field,48 the mechanical tension becomes easier in the presence of magnetic fields. Fig. 3b shows both the initial stress and the ultimate stress decrease with respect to the magnetic field. Here the normalized magnetic field, ~ H µ 0 G = 0.2 , corresponds to a dimensional field strength of 17.8kA/m, which is comparable to that in experiments.2-5 The deformation of MAPs is usually large in a non-uniform magnetic field.2-3 Fig. 4a illustrates a setup of a rectangular strip of MAP subject to a nonuniform field produced by a pair of electromagnets. Experiments of cylindrical MAPs in such setup have been implemented in Ref. 2 and 3. In our numerical calculation, we use the length of the sample to normalize all other geometric parameters: the distance between the bottom of strip and the axis of magnets Z L = 1 , the size of the magnets d L = 1 , and the distance between the two magnets D L = 2 . While all these parameters can affect the final deformation of a MAP,3 we will only focus on the viscoelastic effect of the material and neglect all mechanical load. By symmetry, we establish a 2-D model consisting of half of the MAP strip and one magnet. The deformation pattern of the sample and the distribution of the magnetic field are plotted in Fig. 4b. An overall elongation is induced by the spatial gradient of the magnetic field. However, the lateral distribution of the field makes the lateral deformation nonuniform and the straight longitudinal extension unstable. In the absence of the symmetry boundary condition, the symmetry may be broken with the sample bending towards one of the magnets. To prevent such unwanted bending and nonuniform lateral deformation, extra constraints (e.g. by using a glass tube2,3) are often applied in the experiments. Similarly, in the following simulations, we add an additional constraint to the edges of the strip by forcing them to be straight. The distribution of the magnetic field is nonuniform: the amplitude of field maximizes near the axis of two magnets where H = H max , and decays exponentially away from the axis. In the undeformed geometry, H ≈ 0.04 H max at the bottom of the sample. As the sample deforms, the magnetic field near the sample is perturbed, but no noticeable change in H max is observed near the magnets axis. We will use H max as an indicator for the strength of the applied field. First, we study the dynamic response of the MAP sample in a cyclic magnetic field, a dimensionless time scale, τ = tG η . H max = H 0 sin ωτ , with The material properties are the same as those in the first example. The maximum dimensionless field strength is chosen to be ~ H µ0 G = 25 , and the corresponding magnetic field at the bottom of sample is about 90kA/m, which is a common value in the similar experiments.2,3 To show the viscoelasticity effect, we plot the total stretch λ and the nominal stress at the fixed end of the strip in Fig. 4c and 4d. When the magnetic field strength increases, the magnitude of both stretch and stress increase. The increase in the area of stressstrain hysterisis curves represents that more energy is dissipated in a higher magnetic field. Besides, the frequency of magnetic field also has a significant effect on the performance of viscoelastic MAPs, as shown in Fig. 4d. The relaxation time (shown in Fig. 3b) of the material with the chosen parameters is approximately τ = 2 , corresponding to a characteristic frequency, ω = 0.5 . Compared to this specific frequency, when the sample is actuated by a magnetic field at a relatively low frequency, the material has more time to relax and thus the stretch is higher. On the other hand, when the magnetic field alternates at a relatively high frequency, the hysteresis loop becomes smaller. As a prediction, the hysteresis will finally disappear at a much higher frequency, which indicates that there is insufficient time for the irreversible process to take place. In Fig. 4e, we vary the dimensionless parameter χ from 0.1 to 0.9, and plot the equilibrium deformation of the sample as a function of the applied field. As expected, the more elastic material (larger χ ) has a smaller deformation, while the more liquid-like material (smaller χ ) has a larger deformation. Fig. 4e also shows that the stretch λ increases drastically at higher but finite magnetic field. This trend is related to the instability observed in the experiments.2,3 The instability is mainly due to the geometry and the spatial distribution of the magnetic field. Multiple equilibrium states can be achieved under the same applied field: the sample can have a smaller elongation and remain in the region of lower magnetic field gradient; alternatively the sample can be highly stretched and reach a position much closer to the axis of the magnets where the gradient of magnetic field is much higher. To further capture the instability, we neglect the viscoelasticity of the material and study the response of a fully elastic ( χ = 1 ) MAP. Two stable branches of equilibrium state are shown by the solid curves in Fig. 4f. The magnetic field increases up to a certain value, the sample in the shorter state extends instantaneously to the longer state. Likewise, when the magnetic field decreases below a critical value, the sample originally in the longer state will retract suddenly to the shorter state. In between the two critical values, three equilibrium states are possible. Besides the two stable states, we also obtained the unstable states (shown as the dotted curve on Fig. 4f). The numerical results agree qualitatively with the existing experimental measurements,2,3 quantitative predictions may be possible upon calibration of the material behaviors and a more accurate representation of the actual 3-D geometry. a b MAP sample L Z N S N N S d D c 1.12 d ~ H max µ0 G = 23 1.1 ω = 0.2 1.08 stretch λ stretch λ 1.09 1.06 20 1.03 1 1.06 5 1.04 1.02 ~ H max µ0 G = 20 15 1 e 0 1 0.05 0.1 0.15 0.2 0.25 normalized nominal stress P/G f 1.3 0 0.05 0.1 0.15 normalized nominal stress P/G 0.2 1.5 stable χ = 0.1 1.4 0.9 fluid-like stretch λ 0.5 1.2 stretch λ S unstable 1.3 1.2 1.1 1.1 stable elastic 1 0 5 10 15 ~ H max µ 0 G 20 25 1 0 10 20 30 ~ H max µ 0 G 40 50 Figure 4. (a) A MAP sample is subject to a nonuniform magnetic field produced by two poles of an electromagnet. (b) Part of a 2-D model that captures the elongation of the sample. The color scale indicates the longitudinal stretch λ . The stretch vs. nominal stress in response to a cyclic magnetic field are plotted for different excitation magnitude (c) and frequencies (d). (e) Stretch as a function of field strength. Several values of the viscoelastic parameters χ are used. (f) An instability phenomenon captured by an elastic model. 5. CONCLUDIONS Based on the principles of nonequilibrium thermodynamics, a nonlinear field theory of MAP that couples rate-dependent finite deformation and magnetic field is developed. A simple material model is specified by assuming an ideal viscoelastic MAP with Newtonian-fluid-like kinetic property. Numerical simulations are implemented for the relaxation of a cylinder sample subject to a uniform field, and also on a rectangular strip sample in a non-uniform field. As a uniform magnetic field causes the MAP sample to extend along the field, the externally applied tensile stress in equilibrium of the relaxation is lower than that in the absence of magnetic field. The deformation of the strip sample in a cyclic nonuniform magnetic field is strongly rate dependent. Both the magnitude and the frequency of the applied field have significant effects on the performance of the sample. In a highly non-uniform magnetic field, the instability of the sample caused by geometric nonlinearity is revealed by the model, which achieves a quantitative agreement with existing experiments. 6. ACKNOWLEDGEMENT The authors acknowledge the support from the National Science Foundation through Grant No. CMMI-0900342. REFERENCES [1] Carlson, J.D. and Jolly, M.R., "MR fluid, foam and elastomer devices," Mechatronics 10, 555-569 (2000). [2] Zrínyi, M., Barsi, L. and Bukí, A., "Deformation of ferrogels induced by nonuniform magnetic fields," J. Chem. Phys. 104, 8750-8756 (1996). [3] Snyder, R.L., Nguyen, V.Q. and Ramanujan, R.V., "Design parameters for magneto-elastic soft actuators," Smart Mater. Struct. 19, 055017 (2010). [4] Ramanujan, R.V and Lao, L.L., "The mechanical behavior of smart magnet-hydrogel composites," Smart Mater. Struct. 15, 952-956 (2006). [5] Monz, S., Tschöpe, A. and Birringer, R., "Magnetic properties of isotropic and anisotropic CoFe2O4-based ferrogels and their application as torsional and rotational actuators," Physical Review E 78, 021404 (2008). [6] Zhao, X., Kim, J., Cezar, C.A., Huebsch, N., Lee, K., Bouhadir, K. and Mooney, D.J., "Active scaffolds for ondemand drug and cell delivery," P. Natl. Acad. Sci. USA 108, 67-62 (2011). [7] Liu, T.Y., Hu, S.H., Liu, T.Y., Liu, D.M. and Chen, S.Y., "Magnetic-sensitive behavior of intelligent ferrogels for controlled release of drug," Langmuir 22, 5974-5978 (2006). [8] Ginder, J.M., Schlotter, W.F. and Nichols, M.E., "Magnetorheological elastomers in tunable vibration absorbers," Proc. SPIE 4331, 103-110 (2001). [9] Deng, H., Gong, X. and Wang, L., "Development of an adaptive tuned vibration absorber with magnetorheological elastomer," Smart Mater. Struct. 15, N111-N116 (2006). [10] Lerner, A.A. and Cunefare, K.A., "Performance of MRE-based vibration absorbers," J. Intel. Mater. Syst. Struct. 19, 551-563 (2008). [11] Zajac, P., Kaleta, J., Lewandowski, D. and Gasperowicz, A., "Isotropic magnetorheological elastomers with thermoplastic matrices: structure, damping properties and testing," Smart Mater. Struct. 19, 045014 (2010). [12] Faidley, L.E., Han, Y., Tucker, K., Timmons, S. and Hong, W., "Axial strain of ferrogels under cyclic magnetic fields," Smart Mater. Struct. 19, 075001 (2010). [13] Farshad, M. and Benine, A., "Magnetoactive elastomer composites," Polymer testing 23, 347-353 (2004). [14] Varga, Z., Filipcsei, G. and Zrínyi, M., "Magnetic field sensitive functional elastomers with tunable elastic modulus," Polymer 47, 227-233 (2006). [15] Chen, L., Gong, X. and Li W. "Microstructures and viscoelastic properties of anisotropic magnetorheological elastomers," Smart Mater. Struct. 16, 2645-2650 (2007). [16] Zhou, G.Y., "Shear properties of a magnetorheological elastomer," Smart Mater. Struct. 12, 139-146 (2003). [17] Rao, P.V., Maniprakash, S., Srinivasan, S.M. and Srinivasa, A.R., "Functional behavior of isotropic magnetorheological gels," Smart Mater. Struct. 19, 1-9 (2010). [18] Lockette, P.V., Lofland, S., Biggs, J., Roche, J., Mineroff, J. and Babcock, M., "Investigating new symmetry classes in magneto-rheological elastomers: 1. Cantilever bending behavior," Submitted to Smart Mater. Struct. [19] Göktürk, H.S., Fiske, T.J. and Kalyon D.M., "Electric and magnetic properties of a thermoplastic elastomer incorporated with ferromagnetic powders," IEEE Trans on magnetics 28(6), 4170-4176 (1993). [20] Jolly, M.R., Carlson, J.D. and Munoz, B.C., "A model of the behavior of magnetorheological materials," Smart Mater. Struct. 5, 607-614 (1996). [21] Davis, L.C., "Model of magnetorheological elastomers," J. Appl. Phys. 85(6), 3348-3351 (1999). [22] Shen, Y., Golnaraghi, M.F. and Heppler, G.R., "Experimental research and modeling of magnetorheological elastomers," J. Intel. Mater. Syst. Struct. 15, 27-35 (2004). [23] Brigadnov, I.A. and Dorfmann, A., "Mathmatical modeling of magneto-sensitive elastomers," Inter. J. Solids. Strut. 40, 4659-4674 (2003). [24] Dorfmann, A. and Ogen, R.W., "Nonlinear magnetoelastic deformations of elastomers," Acta Mechanica. (2003). [25] Dorfmann, A., Ogden, R.W. and Saccomandi, G., "The effect of rotation on the nonlinear magnetoelastic response of a circular cylindrical tube," Int. J. Solid. Struct. 42, 3700-3715 (2005). [26] Bustamante, R., Dorfmann, A. and Ogden, R.W., "A nonlinear magnetoelastic tube under extension and inflation in an axial magnetic field: numerical solution," J. Eng. Math. 59, 139 (2007). [27] Bustamante, R., Dorfmann, A. and Ogden, R.W., "On variational formulations in nonlinear magnetoelastostatics," Math. Mech. Solids. 13, 725 (2008). [28] Castañeda, P.P. and Galipeau, E., "Homogenization-based constitutive models for magnetorheological elastomers at finite strain," J. Mech. Phys. Solids 59, 194-215 (2011). [29] Kankanala, S.V., Triantafyllidis, N., "On finitely strained magnetorheological elastomers," J. Mech. Phys. Solids 52, 2869-2908 (2004). [30] Stepanov, G.V., Abramchuk, S.S., Grishin, D.A., Nikitin, L.V., Kramarenko, E.Yu and Khokhlov, A.R., "Effect of a homogeneous magnetic field on the viscoelastic behavior of magnetic elastomers," Polymer 48, 488-495 (2007). [31] Li, W.H., Zhou, Y. and Tian, T.F., "Viscoelastic properties of MR elastomers under harmonic loading," Rheol Acta 49, 733-740 (2010). [32] Chertovich, A.V., Stepanov, G.V., Kramarenko, E.Yu. and Khokhlov, A.R., "New composite elastomers with giant magnetic response," Macromol. Mater. Eng 295, 336-341 (2010). [33] Bellan, C. and Bossis, G. "Field dependence of viscoelastic properties of MR elastomers," Int. J. Modern Phys. B 16, Nos.17&18, 2447-2453 (2002). [34] Spencer Jr., B.F., Dyke, S.J., Sain, S.J. and Carlson, J.D., "Phenomenological model of a magnetorheological damper," ASCE Journal of Engineering Mechanics 123(3), 230-238 (1997). [35] Yin, H.M., Sun, L.Z. and Chen, J.S., "Magneto-elastic modeling of composites containing chain-structured magnetostrictive particles," J. Mech. Phys. Solids 54, 975-1003 (2006). [36] Suo, Z., Zhao, X. and Greene, W.H., "A nonlinear field theory of deformable dielectrics," J. Mech. Phys. Solids 56, 467-286 (2008) [37] Suo, Z., "Theory of dielectric elastomers," Acta Mechanica Solida Sinica 23(6), 1-30 (2010). [38] Hong, W., "Modeling viscoelastic dielectrics," J. Mech. Phys. Solids 59, 637-650 (2011). [39] Lee, E.H., "Elastic plastic deformation at finite strain," ASME Trans. J. Appl. Mech. 36, 1-6 (1969). [40] Reese, S. and Govindjee, S., "A theory of finite viscoelasticity and numerical aspects," Int. J. Solids Struct. 35, 3455-3482 (1998). [41] Zhao, X., Koh, S. and Suo, Z., "Nonequlibrium thermodynamics of dielectric elastomers," International journal of applied mechanics, in press. [42] Treloar, L.R., [The physics of rubber elasticity], Oxford University Press, (1975) [43] Flory, P.J., "Theory of elasticity of polymer networks: The effect of local constraints on junctions," J. Chem. Phys. 66, 5720-5729 (1977). [44] Arruda, E.M. and Boyce, M.C., "A three-dimensional constitutive model for the large stretch behavior of rubber elastic materials," J. Mech. Phys. Solids 41, 389412 (1993). [45] Bergström, J.S. and Boyce, M.C., "Constitutive modeling of the large strain time-dependent behavior of elastomers," J. Mech. Phys. Solids 46, 931-954 (1998). [46] Ferry, J.D., "Viscoelastic properties of polymers, 3rd Ed," John Wiley and Sons, New York, NY (1980). [47] Huber, N. and Tsakmakis, C., "Finite deformation viscoelasticity laws," Mech. Mater. 32, 1-18 (2000). [48] Han, Y., Hong, W. and Faidley, L.E., "Coupled magnetic field and viscoelasticity of ferrogels," International Journal of Applied Mechanics, in press, preprint available online: http://imechanica.org/node/9602.