On the stiffening effect of magneto-rheological elastomers
advertisement

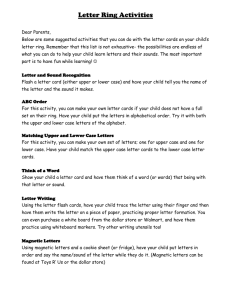
On the stiffening effect of magneto-rheological elastomers Yi Hana, Wei Honga*, LeAnn E. Faidleyb a b Department of Aerospace Engineering, Iowa State University, Ames, IA 50011, USA Department of Chemistry and Engineering Science, Wartburg College, Waverly, IA 50677, USA Abstract Magneto-rheological elastomers (MREs), a class of polymer-based composites with dispersed magnetic filler particles, are known for their tunable stiffness. The magnetic-field-induced stiffening effect, namely the magneto-rheological (MR) effect, is often attributed to the magnetic dipolar interaction. The direct attraction between two magnetic dipoles could increase the shear modulus of the material, but not the tensile modulus, while experiments showed increases in both. In this paper, we investigate the possible mechanisms of the MR effect using two different methods: a dipolar interaction model and a micromechanics model based on a continuum field theory. It is found that while the magnetic dipolar interaction is indeed the major cause of the MR effect, the specific microstructure of an MRE is the key to the modulus increase. An MRE of straight chains has a negative MR effect in tension, but one of wavy chains can have tensile modulus increase under a magnetic field. While the chain-chain magnetic interaction is shown to be insignificant, the filler concentration plays an important role on the strength of MR effect, just as observed in experiments. Keywords: stiffening effect, magneto-rheological elastomers, dipolar interaction, microstructure *whong@iastate.edu 1 Introduction As a class of soft active materials, magneto-rheological elastomers (MREs) have been utilized in various applications for their controllable mechanical properties. An MRE consists of dispersed magnetic particles, typically iron particles in micron size, and a polymeric matrix, such as silicone rubber, natural rubber, or polyurethane (e.g. Carlson and Jolly, 2000; Varga et al., 2006; Zajac et al, 2010; Wu et al., 2010). By virtue of their strong magneto-mechanical coupling, MREs can change their stiffness significantly when exposed to an external magnetic field. Such a characteristic has found MREs applications in variable vibration absorbers and damping components (e.g. Ginder et al., 2000; Deng et al., 2006; Lerner and Cunefare, 2008; Hoang et al., 2011), noise barrier system (Farshad and Roux, 2004), and sensors (e.g. Tian et al., 2011). In addition to the tunable stiffness, a magnetic field may also result in a fast and reversible deformation in the material (e.g. Guan et al., 2008; Danas et al., 2012). The fieldinduced deformation is more significant when the matrix is a polymeric gel (e.g. Filipcsei and Zrínyi, 2010; Wu et al., 2011). The high sensitivity and large deformation of gel-based magneto composites has made 1 12/16/2011 them promising candidates for actuators and sensors (e.g. Zrínyi et al., 1997; Monz et al., 2008; Faidley et al., 2010; Snyder et al., 2010). Subject to a magnetic field, the modulus of an MRE increases. Such a field-induced stiffening phenomenon is often referred to as the magneto-rheological (MR) effect. A great number of experiments have been carried out to study the MR effect of these filled elastomers. MR effects in both shear modulus (e.g. Jolly et al., 1996; Zhou et al., 2003; Shen et al., 2004) and tensile modulus (e.g. Bellan & Bossis, 2002; Zhou, 2003; Varga et al., 2006) have been observed. In these experiments, it has been noticed that microstructure plays an important role in the macroscopic behavior of the materials. Stronger MR effect is obtained in anisotropic MREs, in which the particles are aligned and form chainlike structures during curing (e.g. Zhou, 2003; Chen et al., 2007; Wu et al., 2010). Moreover, MR effect is most significant when the magnetic field is applied in the direction along the chains (e.g. Varga et al., 2006). MR effect is also obtained, although not as strong, in isotropic MREs with randomly dispersed particles (e.g. Zajac et al., 2010). Experiments also showed that the stiffness change also depends on the magnitude and frequency of the strain (e.g. Zhou, 2003; Blom & Kari, 2005; Stepanov et al., 2007; Wu et al., 2010), and the volume fraction of particles (e.g. Bellan and Bossis, 2002; Nikitin et al., 2006). Theoretical and numerical models have been developed to search for the mechanism of the MR effect. By assuming that the filler particles in an MRE are magnetized into dipoles in a magnetic field, and that these dipoles are aligned into straight chains as sketched in Fig. 1a, Jolly et al. (1996) used the interaction between two neighboring particles to explain the increase in shear modulus. Subsequently the interaction among all the particles of an infinite long chain has been modeled (Shen et al., 2004). Finite element calculations also show the same effect on the shear modulus for infinitely long straight chain structures (Davis 1999). However, the increased shear modulus in an anisotropic material does not necessarily imply an increased tensile modulus. In fact, the same dipolar interaction model predicts the opposite trend for tensile modulus. For example, an MRE with a rectangular lattice of dipoles would have a tensile modulus decreasing with the applied field (Ivaneyko et al. 2011). In addition to the dipolar interaction, it is believed that the strain-stiffening of the elastomer matrix would contribute to the MR effect (e.g. Kankanala and Triantafyllidis, 2004): the attraction narrows the gap between adjacent particles and locally stiffens the material. It is also suggested that the local non-affine deformation could be important for the MR effect (Yin and Sun, 2005). Moreover, the chain-chain magnetic interaction is believed to contribute to the MR effect (e.g. Ivaneyko et al., 2011; Stolbov et al., 2011). With all these mechanisms proposed but none verified, the question remains: which is the ultimate mechanism of the MR effect in MREs? In order to identify the dominating effect, the current paper will compare the contributions from various possible mechanisms. Available micrographs (e.g. Coquelle et al., 2006; Chen et al., 2007) of MREs show that the aligned particle chains are rarely straight, but more often wavy, like those sketched in Fig. 1b or Fig. 1c. The wavy pattern has been used to explain the magnetostriction of an MRE subjected to a homogeneous magnetic field (Danas et al., 2012), and has also been suggested as a possible cause of the MR effect in tensile modulus (Ivaneyko et al., 2011). In section 2, the simple dipolar interaction model will be extended to study the effect of non-straight chains. Dipolar 2 12/16/2011 interactions between particles in wavy chains can explain the observed MR effect in tensile modulus, but is not satisfactory in studying the shear modulus. A more detailed model is needed to fully consider the magneto-mechanical interactions between the soft matrix and rigid particles, as well as the interaction between particles. Following Han et al. (2011), we implement the field theory of finitedeformation magneto-elasticity (described in Section 3) into a finite element method. In Section 4, the field theory and the numerical method is applied to the composite microstructure of MREs. In Section 5, the MR effects in both tensile and shear moduli are analyzed for several microstructure patterns, and contributions of different mechanisms are discussed. The effect of filler volume fraction is also studied. 2 Dipolar interaction in an MRE Magnetically soft particles are often used as fillers in MREs to induce the magneto-mechanical coupling. The distribution of the magnetic particles can be either isotropic or partially aligned by curing under a magnetic field. Following Jolly et al. (1996), we will consider each filler particle as a magnetic dipole, and model the magnetic interaction approximately as dipolar interactions. While the actual curing process is complex, basic physics tells us that there is no stable equilibrium state for magnetic dipoles aligned in a magnetic field (Earnshaw, 1842). The alignment of filler particles depends on various aspects of the curing process, such as the strength of the applied field, the initial dispersion, and the speed of curing. Therefore, instead of idealizing the microstructure as perfectly aligned straight chains, we will study three representative microstructures in this section. They are, as shown in Fig. 1, a) a straight chain, b) a two-dimensional (2D) wavy chain, and c) a three-dimensional (3D) helical chain. For simplicity, we consider the chain structures to be periodic and infinitely long. Except for the straight chain, two parameters are needed to describe the geometry: the horizontal and vertical spacing between neighboring particles, b and h , respectively. In particular, when b 0 , both the wavy chain and the helical chain reduce to a straight chain. The effect of the magnetic interaction can be accounted for by calculating the magnetic interaction energy between dipoles. Let us assume that the field is applied in the vertical direction, along the aligned chains. At least for the straight chain and the 2D wavy chain, the symmetry suggests the dipole moment to be vertical. Here, we will assume that the dipoles are in the vertical direction in all three cases, and each dipole carries a moment, m . For two magnetic dipoles separated by distance, r , the magnetic interaction energy is (Rosensweig, 1985) u 0 m 2 1 3 cos 2 , 3 4r (1) where 0 is the magnetic constant, and is the angle between the line connecting the two dipoles and the direction of magnetization. The magnetic interaction per particle can be calculated by summing Eq. (1) over the contributions from all other particles. For example, the interaction energy per dipole of an infinitely long straight chain (Fig. 1a) is 3 12/16/2011 0 m 2 1 0 m 2 Ua 1.2021 h3 , h3 n1 n3 (2) The interaction energy per dipole in a 2D wavy chain (Fig. 1b) can also be directly evaluated: Ub where f n 1 2 0 m 2 0.5 f 0.1503 , h3 22n 1 2 2n 1 2 2 5 2 (3) , and b h is a dimensionless parameter for the chain geometry. Let N be the number of particles per unit volume. The magnetic interaction energy per unit volume can be written as Wm NU b . The magnetic interaction energy is not only a function of the dipole moment, m , but also dependent on the chain geometry, which varies during a deformation process. Following the usual approach in composite theories, we assume an affine deformation. Let us first consider the uniaxial tension along the chain direction. When an axial stretch is applied to the chain structure, the geometry changes accordingly: h changes to h while b becomes 1b , and thus becomes 2 . The magnetic energy density, as a function of the axial stretch, reads Wm N0 m 2 3h3 0.5 f 2 0.1503 . (4) Adding the magnetic energy to the elastic strain energy yields the total internal energy of the composite, W . In a uniaxial state of deformation, the nominal axial stress is given by s W , while the tensile stiffness is usually defined as E 2W 2 . The stiffness is in general a function of the stretch. Here we will only look at the modulus, namely the initial stiffness E 1 . Normalizing stresses by N 0 m2 h3 , we obtain the magnetic contribution to the tensile modulus in a dimensionless form, Em 6 f 9f 2 2 f 1.8032 . (5) Eq. (5) is plotted in Fig. 2. It can be seen that the magnetic dipolar interaction has a negative contribution to the modulus at 0 and at a relatively small , i.e. when the particle chains are almost straight. In the other extreme, at relatively large , a wavy chain reduces to two parallel straight chains, and the magnetic contribution to modulus is also negative. Only at an intermediate value, Em is positive, and it peaks at 0.6 . A similar calculation on the 3D pattern (Fig. 1c), as plotted in Fig. 2, shows the same trend. The results have demonstrated a strong dependence of the MR effect on the microstructure of the filler particles, especially on the chain alignment. If all particle chains are straight and perfectly aligned in the 4 12/16/2011 direction of the magnetic field, the MRE would have a negative tensile MR effect, i.e. a reduction of tensile modulus (in the chain direction) upon application of a magnetic field. Only when the filler particles form a wavy chain with the magnitude of waviness comparable to the inter-particle distance, a positive MR effect can be expected. The negative value of Em at relatively large also implies that the magnetic interaction between two chains would not give an MR effect, and the chain-chain interaction is negligible when the distance between two chains is much larger than that between neighboring particles, which is the case often observed in physical MREs. The convergence of the series summation in f has also been tested by taking a truncated series. It is found that the magnetic dipolar interaction decays very fast in space and considering only the adjacent particles (i.e. 4 particles in 2D, 6 particles in 3D) would already give a good approximate. A comparison between the 2D and 3D results shows that the 3D helical chain gives approximately 45% higher modulus increase than the 2D wavy chains. This is because a particle in a helical chain has more misaligned adjacent particles. We could imagine that with more than 3 particles agglomerate in the cross-section of a filler chain in an actual polymer composite, the MR effect could be even stronger. Using the same approach, we also calculate the change in the shear modulus due to the magnetic dipolar interaction, and plot the results of a 2D wavy chain in Fig. 3. The result is dependent on the relative direction of shear. When the applied shear is parallel to the direction of the magnetic moments (case 2 on Fig. 3), the result is similar to the change in tensile modulus: a wavy chain will be stiffened against shearing while a straight chain is more compliant. If the applied shear is perpendicular to the direction of the magnetic moments (case 1 on Fig. 3), the result is opposite. At the first sight, case 1 may seem to be closer to the usual experimental setup, i.e. a shear perpendicular to the applied magnetic field (e.g. Jolly et al., 1996; Zhou, 2003; Shen et al., 2004). Nevertheless, the direction of magnetic dipoles may not always be in the direction of the applied field. In the composite, the particle chains form a highly permeable path. As a result, the magnetization of the particles is more likely to be in the chain direction and the direction of magnetization will thus tend to follow the rotation induced by shear. Under such circumstances, the actual deformation process may be close to case 2 shown by Fig. 3. The two cases illustrated here are the extreme cases, and the actual shear behavior of MREs is expected to fall between them. To further investigate on the MR effect on shear, a detailed numerical model based on a field theory will be presented in Section 5. Although the dipolar interaction model provides a means of understanding the mechanism of the MR effect, it is also limited by its simplicity. First, to be considered as dipoles, the inter-particle distance needs to be much larger than the size of individual particle, whereas the available micrographs (e.g. Chen et al. 2007) showed that the gaps between particles are often comparable or even smaller than a particle. Second, the model assumes constant dipole moment on each filler particle, while in reality both the magnitude and the direction of the magnetization may be changed by deformation. Third, the presence of the rigid particles may induce highly non-affine deformation. The local non-affine deformation, e.g. relative motion of particles due to magnetic attraction, may result in a change in the overall mechanical stiffness. The large local deformation may also induce stiffening in the matrix because of the material nonlinearity. To verify the prediction of the simple model and to investigate the 5 12/16/2011 effect of other possible mechanisms, a continuum model will be introduced and used to study the microstructural interactions. 3 Continuum field theory of magneto-elasticity The macroscopic magneto-mechanical behavior of polymer composites consisting of randomly distributed particles has been analyzed using micromechanics (e.g. Borcea et al., 2001) and homogenized models (e.g. Brigadnov and Dorfmann, 2003; Kankanala and Triantafyllidis, 2004; Bustamante et al., 2007; Bustamante, 2008; Ponte-Castañeda and Galipeau, 2011). Field theories have been formulated for problems with complex geometries (Bustamante et al., 2007) and the timedependent behaviors of isotropic magnetic polymer composite (Han et al., 2011). Following our recent work (Han et al., 2011) and the analogous theory for deformable dielectrics (e.g. Suo et al., 2008), this section introduces a continuum model to study the microstructures of MREs, by treating the polymer matrix and the filler particles as distinct domains. We use material coordinates and measure the physical quantities with respect to the reference state, i.e. the undeformed state in the absence of any magnetic or mechanical load. Let X be the coordinate of a material particle in the reference state. At time t , the particle X moves to a place with coordinate xX, t . The deformation gradient tensor is defined as FiK xi X, t . X K (6) In the reference state, let dV X be an element of volume and NX dAX be an element of interface, where dAX is the area of the element and ΝX is the unit vector normal to the interface between two materials labeled as and , pointing towards the material . Denote the mechanical force in the volume as bX, t dV X and that on a surface as t X, t dAX . The nominal stress ~ ~ siK X, t , by definition, satisfies the equation s iK ~ i dV bii dV ~ tii dA , X K (7) for arbitrary test field ξ X in any domain and on its surface. Applying the divergence theorem, one would find that siK X, t ~ bi X, t 0 , X K (8) in the volume, and that s X, t s X, t N X, t ~t X, t , iK iK K 6 i (9) 12/16/2011 on an interface. In general, a piece of functional MRE may contain conductive parts such as an electromagnetic coil on the surface or in the volume. For simplicity, we take a conceptual idealization and neglect both the mechanical stiffness and the electric resistance of the conductive parts. Upon homogenization, we write the volumetric current density as j X, t and the interfacial current density as J X, t , both ~ ~ measured with respect to the undeformed geometry. Let ηX be a vector test function. Define the nominal magnetic field, HX, t , such that ~ iKL ~ i ~ ~ HK dV jii dV J ii dA X L (10) holds true for arbitrary test field ηX , where iKL is the permutation symbol. Upon application of the divergence theorem, Eq. (10) yields an equivalent definition of the nominal magnetic field in a differential form: ~ H L ~ iKL ji , X K (11) in the volume and iKL ~ ~ ~ HL HL Ji , X K (12) on an interface. Eqs. (11) and (12) are known as Ampère's circuit law. To ease numerical calculation, we introduce a magnetic vector potential AX in a Lagrange ~ description, and define the nominal magnetic induction BX, t as ~ A ~ BK iKL i . X L (13) The magnetic induction automatically obeys Gauss’s Law ~ BK X, t 0, X K (14) in the bulk and B~ K X, t B~K X, t N K X, t 0 7 (15) 12/16/2011 on an interface. The definitions of nominal stress and nominal magnetic field, Eqs. (7) and (10), hold true for arbitrary test functions ξ X and ηX . Specifically when ξ x and η A , the definitions recover the principle of virtual work. The right-hand-side of the equations is the virtual work of external forces, while the left-hand-side is the associated changes in the free energy of the material. Let WdV X be the Helmholtz free energy of a material element. It is further assumed that the free-energy density is a ~ function of the deformation gradient and the nominal magnetic induction, W F, B . Associated with ~ small changes FiK and BK , the free energy of the material per unit reference volume changes by ~ ~ W siK FiK H K BK . (16) Consequently, the nominal stress and the nominal magnetic field relate to the free-energy function as ~ ~ W F, B W F, B ~ siK and H K . ~ FiK BK (17) The geometric relations between the true fields and the nominal fields are well known (e.g. Dorfmann and Ogden, 2004; Suo et al., 2008). For example, the true stress ij relates to the nominal stress by ij F jK siK det F . (18) Similarly, the true magnetic induction and true magnetic field are related to the nominal quantities as ~ FiK BK ~ Bi , and H i FiK H K . det F (19) In homogenized models, a free-energy function is usually specified for the entire composite, with little information on detailed microstructures (e.g. Dorfmann and Ogden, 2004; Kankanala and Triantafyllidis, 2004; Ponte-Castañeda and Galipeau, 2011). In the current study, we will look at the effect of microstructures by considering the polymer matrix and the filler particles as distinct domains. In each domain the material behaviors are relatively simple. The polymer matrix is mechanically elastic and nonmagnetic, i.e. having the same permeability as vacuum. The filler particles are much stiffer and have a much higher permeability. For simplicity, we will assume both the matrix and the filler to be magnetically linear. The magnetic properties of the matrix and the filler are assumed to be liquid-like, with permeability independent of deformation. Thus the Helmholtz free-energy densities in the two phases can both be written in the form W Ws F Wm Β , where Ws is the elastic strain energy, and Wm is the magnetic energy. Although the filler particles hardly deform and may be modeled as linear 8 12/16/2011 elastic, we use the neo-Hookean material law for both phases to unify the formulation. The magnetic energy per unit volume in the current state is Bi Bi 2 , with being the permeability. Such a model represents a material with physically non-coupled magnetic and mechanical properties. Under these assumptions, the free-energy function takes the form F F ~ ~ ~ G W F, B FiK FiK 3 iK iL BK BL . 2 2 det F (20) The shear modulus G takes different values in the two phases: G0 in the matrix and G f in the filler particles. We also denote the permeability of the matrix as 0 , and that of the fillers as f . In the current paper, the material is assumed to be incompressible. The constraint det F 1 is enforced by adding to the total energy of the system a term, det F 1 pdV , where p is a Lagrange multiplier, i.e. the hydrostatic pressure. The free-energy function, which determines the specific form of the constitutive relations in Eq. (17), completes the field theory of MREs. There are four parameters for each matrix-filler combination, the initial moduli G0 and G f , and the permeabilities 0 and f . 4 Stiffness measures of an MRE The MR effect of a solid is the change in its stiffness due to the presence of an external magnetic field. When a solid undergoes finite deformation under a magnetic field, the definition of stiffness is not unique. In fact, the partial derivative of any stress with respect to any strain could serve as a measure of stiffness. While most of these stiffness measures are physically sensible, not all are suitable for the study of MR effect. To quantify the MR effect, we will identify a proper stiffness measure in this section. While the following description is equally suitable for a general deformation state, for the sake of clarity, we will illustrate the idea by a simple example of a solid subject to uniaxial tension along the ~ direction of the applied field. Let B be the nominal magnetic induction, and be the axial stretch in the same direction. The incompressibility dictates the lateral stretches to be 1 . Consider a homogeneous material with physically non-coupled magneto-mechanical properties. Most nonmagnetic materials, such as rubber, fall into this category. The free-energy function (20) is reduced to 2 ~2 2 ~ G B W , B 2 3 . 2 2 (21) The corresponding nominal axial stress is thus given by s W , B 1 B2 G 2 . 9 (22) 12/16/2011 The partial derivative of the nominal stress s , with respect to its work conjugate, the stretch , ~ ~ s , B 2 B2 , G 1 3 (23) seems to be a natural measure of stiffness. However, such a stiffness measure increases with the magnetic induction even for a homogeneous nonmagnetic material. In other words, a modulus defined by Eq. (23) implies that all materials, including natural rubber, have MR effect! More generally, the stiffness tensor defined by the derivative of the nominal stress with respect to the deformation gradient is non-objective. This derivative contains not only the physical property of the material, but also geometric information. To deduce an objective measure of the stiffness, we may invoke the Piola-Kirchhoff stress of the second kind, ~ 1 B2 . S G 1 3 s (24) The stiffness measure given by the partial derivative of the 2nd Piola-Kirchhoff stress at constant nominal ~ magnetic induction, S , B 3G 4 , is independent of the applied field for a homogeneous nonmagnetic material. Similarly, we can also invoke the true stress 2 ~2 1 B2 2 1 B s G G 2 . The partial derivative of induction, , B G 2 2 the true stress at constant (25) true , is field-independent for nonmagnetic materials. magnetic Alternatively, we may also take the partial derivatives of the 2nd Piola-Kirchhoff stress or the true stress by keeping the nominal or true magnetic field constant, respectively. While none of these four stiffness measures give false MR effect, they could take different values even for the same material. In order to compare with experimental measurements, we need to choose the one closest to the actual condition. Magnetic fields have been applied in various ways in MRE experiments. In the shear tests where the MREs are placed in the gap between two permanent magnets (e.g. Jolly et al., 1996; Varga et al., 2006; Kaleta and Lewandowski, 2007; Stepanov et al., 2007; Chen et al., 2007; Zajac et al., 2010), a constant true magnetic induction may be assumed due to the continuity of the B field across an interface. In the case when magnetically hard particles are used as fillers (e.g. Lockette et al., 2011), a constant nominal induction (or nominal magnetization) may be more suitable. In tension or compression tests, the magnetic fields are usually applied through electromagnetic coils (e.g. Varga et al., 2006; Li et al., 2010; Chertovich et al., 2010), as sketched in Fig. 4a. Due to the difference in permeability between the sample and the surrounded air, the magnetic field is not uniformly distributed. Let us neglect the surface effect by considering a small representative volume in the middle 10 12/16/2011 of the sample, in which the field is almost uniform. According to Ampere’s law, the integration of the magnetic field along the contour shown in Fig. 4a equals the current enclosed. With the lateral magnetic field inside the coil and the field outside of the coil neglected, the main contribution to the contour integral is from section a. Since the coil seldom deforms with the sample, we carry out the integral of the true field in the current state. If a constant current density J is applied to the coil, the true magnetic field deep inside the sample is constant, H J . In the following calculations, we are going to look at the tensile stiffness of MREs. In order to compare with available experimental results, the majority of which applied the field via a solenoid, we will use the stiffness measure in terms of true stress under constant true magnetic field, E 5 , H . (26) Microstructure model for MREs We have implemented the general field theory described in Section 3 into a two-dimensional finite element model using COMSOL Multiphysics 3.5a. The computational domain is a representative cell of the microstructure of the material, containing sub-domains of the matrix and the filler particles. In contrast to the dipole model, the filler particles are now modeled as circular domains with finite diameter d . For example, a computational cell is sketched in Fig. 4b. The displacement, traction, and the magnetic potential are taken to be continuous across the matrix-filler interfaces. Depending on the symmetry of the computational domains, periodical boundary conditions or symmetry boundary conditions are applied on the cell boundaries. A constant true magnetic field is applied by constraining the surface current density on the vertical boundaries. To reduce the number of material parameters, we normalize stress by G0 , magnetic induction by 0G0 , and magnetic field by G0 0 . We assume both the stiffness and the magnetic permeability of the filler material to be 103 times the corresponding values of the matrix, G f G0 f 0 103 , similar to those taken in the literature (Davis et al., 1999). For a typical shear modulus of the polymer matrix, 1 MPa , a dimensionless ~ magnetic field H 0 G0 0.5 is approximately 445 kA m , far below the saturation field for iron particles. Our linear magnetic assumption should thus be valid. First, the responses of straight-chain and wavy-chain structures subject to uniaxial tension are studied and compared. Both chain structures are assumed to be infinitely long, and periodic boundary conditions are applied. In the numerical experiments, 1% tensile strain was applied to the unit cell along the chain direction. We use the stiffness measure given in terms of true stress and true magnetic field, Eq. 26. The ratio of the tensile modulus to the reference in the absence of a field, E E0 , is plotted in Fig. 5 as a function of the dimensionless field strength H 0 G0 , under various values of the geometric parameters h d and . Fig. 5a confirms the prediction of the dipole-interaction model, MREs with straight filler chains have a negative MR effect. Moreover, the relative change in modulus 11 12/16/2011 decreases with h d , since the magnetic interaction decreases as the inter-particle distance increases. The results of a wavy-chain structure are also consistent with that of the dipolar-interaction model and existing experiments. As shown in Fig. 5b, at intermediate values of , the wavy-chain structure has a modulus increases with the magnetic field, i.e. it has a positive MR effect. It could also be seen in Fig. 5b that the stiffness of some wavy-chain structures ( 0.4 ) is not a monotonous function of the applied magnetic field. At a relative high magnetic field, the modulus decreases slightly. We believe this phenomenon is caused by the non-affine deformation under a strong magnetic field – the particles are better aligned and give rise to a smaller effective . The shear moduli of these structures are also studied and the results are plotted in Fig. 6. The modulus values are normalized by that in the absence of a magnetic field Gi . The results stand in between the two limiting cases given by the dipolar-interaction model. The MR effect in shear modulus is maximum for straight chains ( 0 ) and decreases with , more like the case 1 (non-rotating moment) in Fig. 3. However, the MR effect in shear never becomes negative. Even for wavy chains with relatively large , the magnetic contribution to shear modulus is still finite and positive, similar to case 2 (rotating moment) in Fig. 3. Despite the consistency between the dipole-interaction model and the microstructure model for infinite chains, questions still remain. In fact, all MREs have chains of filler particles in finite length (e.g. Jolly et al., 1996; Wu et al., 2010 and 2011). It is unclear how the gaps between chains of finite lengths (as in Fig. 7a) and the overlaps between adjacent chains (as in Fig. 7b) influence the MR effect of a composite. To characterize the effect of such gaps and overlaps, we select the computational unit cells as the rectangular regions delineated by dashed lines in Fig. 7. Let l be the length of a chain, measured from the center of the first particle to that of the last one, and let L be the sum of the chain length and the gap size. To focus on the chain-chain interaction, only straight chains are considered. The distance between neighboring particles within a chain is fixed at h d 1.2 and the horizontal chain-chain distance is fixed at w L 0.5 , but the relative chain length l L varies from 0.5 to 1. The deformation and distribution of the magnetic field of the computational unit cells at a 1% tensile strain is shown in Fig. 8. The color scale shows the magnitude of the stretch. Both patterns exhibit highly non-affine deformation: the inter-particle distance reduces and the polymer matrix is stretched more in the gaps. However, no stiffening effect has been observed. Fig. 9 plots the relative stiffness of various structures with finite chain lengths. In both structures, the overall stiffness decreases with the applied magnetic field. In other words, both structures show negative MR effect, although smaller than that of an infinitely long straight chain. Based on this evidence, we expect that neither the effect of gaps nor that of overlap is the dominating mechanism for MR effect. The insignificant change induced by the overlap between two parallel chains indicates that the chain-chain interaction has a relatively small contribution. We have thus identified the dipolar interactions between adjacent particles in a chain, especially a wavy one, as the dominating mechanism for MR effect. Although the contribution from chain-chain interaction is secondary, increasing the filler concentration will result in a denser chain distribution and thus larger MR effect. It has been observed in the experiments that higher volume fraction leads to 12 12/16/2011 stronger MR effect either in shear modulus or in tensile modulus (Bellan and Bossis, 2002; Nikitin et al., 2006; Varga et al., 2006). Here, we study the effect of particle volume fraction by looking at MREs with infinite long wavy chains in 2D models. The relative change in tensile modulus with respect to that in absence of magnetic field, E E0 , is plotted against the true magnetic field in Fig. 10a, for various values of the filler volume fraction . As increases, the mutual particle interaction becomes stronger and leads to higher excess modulus, which is consistent with the experiment observations (e.g. Varga et al., 2006). Under relatively low magnetic fields, the relative change in modulus scales approximately with the square of field strength. We fit the computational data in Fig. 10a to the expression E E0 0 H 2 G0 and plot the fitting values of in Fig. 10b. It is found that is approximately linear in the filler volume fraction, . The result, which still needs to be validated by experiments, is of importance to the design of MREs. It should be admitted that the accuracy of the result is limited by the 2D nature of the model. A more realistic 3D finite element model is expected to yield more accurate results but is beyond the scope of this paper. 6 Concluding remarks While the MR effect in particle-filled polymer composites has been identified for decades, the dominating mechanism which gives rise to the effect is still unclear. It is clear that the MR effect is strongly correlated with the material’s composite microstructure. In this paper, we investigate the microstructure of MREs through theoretical and numerical models at two different levels. The dipolarinteraction model is used to analyze the magnetic contribution to both tensile and shear moduli of MREs with 2D wavy chains and 3D helical chains. It is found that although a straight chain would have positive MR effect in shear, the effect in tension is negative, and only a wavy or helical chain could have positive MR effect in tension. To further investigate the detailed microstructure as well as other possible mechanisms, a finite element model is developed based on the field theory of magneto-elasticity by treating the matrix and the filler particles as distinct continua. The finite element calculation confirms that the dipolar interaction between neighboring magnetic particles in a wavy chain would give rise to a positive MR effect in both tension and shear. Furthermore, numerical calculations show that the effect of non-affine deformation due to the presence of gaps and overlaps between chains is minor and would not yield MR effect on straight chains. Using the numerical model, we have also studied the effect of filler volume fraction. The 2D model predicts an approximate linear dependence of the relative change in tensile modulus to the volume fraction of filler particles. Acknowledgement The authors acknowledge the support from the National Science Foundation through Grant No. CMMI0900342. 13 12/16/2011 Reference An, Y., Shaw, M.T., 2003. Actuating properties of soft gels with ordered iron particles: basis for a shear actuator. Smart Mater. Struct. 12, 157-163. Bellan, C., Bossis, G., 2002. Field dependence of viscoelastic properties of MR elastomers. Int. J. Modern. Phys. 16, 2447-2453. Blom, P., Kari, L., 2005. Amplitude and frequency dependence of magneto-sensitive rubber in a wide frequency range. Polymer Testing, 24, 656-662. Borcea, L., Bruno, O., 2001. On the magneto-elastic properties of elastomer-ferromagnet composites. J. Mech. Phys. Solids. 49, 2877-2919. Brigadnov, I.A., Dorfmann, A., 2003. Mathematical modeling of magneto-sensitive elastomers. Int. J. Solid. Struct. 40, 4659-4674. Bustamante, R., Dorfmann, A., Ogden, R.W., 2007. A nonlinear magnetoelastic tube under extension and inflation in an axial magnetic field: numerical solution. J. Eng. Math. 59, 139. Bustamante, R., Dorfmann, A., Odgen, R.W., 2008. On variational formulations in nonlinear magnetoelastostatics. Math. Mech. Solids. 13, 725. Carlson, J.D., Jolly, M.R., 2000. MR fluid, foam and elastomer devices. Mechatronics. 10, 555-569. Chen, L., Gong, X., Li, W., 2007. Microstructures and viscoelastic properties of anisotropic magnetorheological elastomers. Smart Mater. Struct. 16, 2645-2650. Chertovich, A.V., Stepanov, G.V., Kramarenko, E.Y., Khokhlov, A.R., 2010. New composite elastomers with giant magnetic response. Macromol. Mater. Eng. 295, 336-341. Coquelle, E., Bossis, G., 2005. Magnetostriction and piezoresistivity in elastomers filled with magnetic particles. J. Adv. Sci. 17, 132-138. Danas, K., Kankanala, S.V., Triantafyllidis, N., 2012. Experiments and modeling of iron-particle-filled magnetorheological elastomers. J. Mech. Phys. Solids. 60, 120-138. Davis, L.C., 1999. Model of magnetorheological elastomers. J. Appl. Phys. 85(6), 3348-3351. Deng, H., Gong, X., Wang, L., 2006. Development of an adaptive tuned vibration absorber with magnetorheological elastomer. Smart Mater. Struct. 15, N111-N116. Dorfmann, A., Ogden, R.W., 2004. Nonlinear magnetoelastic deformations. Q. J. Mech. Appl. Math. 57, 599-562. 14 12/16/2011 Earnshaw, S., 1842. On the nature of the molecular forces which regulate the constitution of the luminiferous ether. Trans. Camb. Phil. Soc. 7, 97–112. Faidley, L.E., Han, Y., Hong, W., 2010. Axial strain of ferrogels under cyclic magnetic fields. Smart Mater. Struct. 19, 075001. Farshad, M., Roux, M.L., 2004. A new active noise abatement barrier system. Polymer Testing. 23, 855860. Filipcsei, G., Zrínyi, M., 2010. Magnetodeformation effects and the swelling of ferrogels in a uniform magnetic field. J. Phys. Condens. Matter 22, 276001. Ginder, J.M., Nichols, M.E., Elie, L.D., Clark, S.M., 2000. Controllable-stiffness components based on magnetorheological elastomers. Proc. Ser. SPIE Smart Struct. Mater. 3985, 418-425. Guan, X., Dong, X., Ou, J., 2008. Magnetostrictive effect of magnetorheological elastomer. J. Magn. Magn. Mater. 320, 158-163. Han, Y., Hong, W., Faidley, L., 2011. Coupled magnetic field and viscoelasticity of ferrogel. Int. J. Appl. Mech. 3, 259-278. Hoang, N., Zhang, N. and Du, H., 2011. An adaptive tunable vibration absorber using a new magnetorheological elastomer for vehicular powertrain transient vibration reduction. Smart Mater. Struct. 20, 015019. Hong, W., 2011. Modeling viscoelastic dielectrics. J. Mech. Phys. Solids. 59, 637-650. Ivaneyko, D., Toshchevikov, V.P., Saphiannikova, M., Heinrich, G., 2011. Magneto-sensitive elastomers in a homogeneous magnetic field: a regular rectangular Lattice model. Macromol. Theory Simul. 20, 411424. Jolly, M.R., Carlson, J.D., Muňoz, B.C., 1996. A model of the behavior of magnetorheological materials. Smart. Mater. Struct. 5, 607-614. Kaleta, J., Lewandowski, D., 2007. Inelastic properties of magnetorheological composites: I. Fabrication, experimental tests, cyclic shear properties. Smart Mater. Struct. 16, 1948-1953. Kankanala, S.V., Triantafyllidis, N., 2004. On finely strained magnetorheological elastomers. J. Mech. Phys. Solids. 52, 2869-2908. Lerner, A.A., Cunefare, K.A., 2008. Performance of MRE-based vibration absorbers. J. Intell. Mater. Syst. Struct. 19, 551-563. Li, W., Zhou, Y., Tian, T., 2010. Viscoelastic properties of MR elastomers under harmonic loading. Rheol Acta. 49, 733-740. 15 12/16/2011 Lockette, P.V., Lofland, S., Biggs, J., Roche, J., Mineroff, J., Babcock, M., 2011. Investigating new symmetry classes in magneto-rheological elastomers: 1. Cantilever bending behavior. Smart Mater. Struct. In press. Monz, S., Tschope, A., Birringer, R., 2008. Magnetic properties of isotropic and anisotropic CoFe2O4based ferrogels and their application as torsional and rotational actuators. Phys. Rev. E 78, 021404. Nikitin, L.V., Korolev, D.G., Stepanov, G.V., Mironova, L.S., 2006. Experimental study of magnetoelastics. Journal of Magnetism and Magnetic Materials, 300, e234-238. Ponte-Castañeda, P., Galipeau, E., 2011. Homogenization-based constitutive magnetorheological elastomers at finite strain. J. Mech. Phys. Solids. 59, 194-215. models for Rao, P.V., Maniprakash, S., Srinivasan, S.M., Srinivasa, A.R., 2010. Functional behavior of isotropic magnetorheological gels. Smart Mater. Struct. 19, 085019. Rosensweig, R.E., 1985. Ferrohydrodynamics. Cambridge University Press. Shen, Y., Golnaraghi, M.F., Heppler, G.R., 2004. Experimental research and modeling of magnetorheological elastomers. J. Intell. Mater. Syst. Struct. 15, 27. Snyder, R.L., Nguyen, V.Q., Ramanujan, R.V., 2010. Design parameters for magneto-elastic soft actuators. Smart Mater. Struct. 19, 055017. Stepanov, G.V., Abramchuk, S.S., Grishin, D.A., Nikitin, L.V., Kramarenko, E.Y., Khokhlov, A.R., 2007. Effect of a homogeneous magnetic field on the viscoelastic behavior of magnetic elastomers. Polymer 48, 488-495. Stolbov, O.V., Raikher, Y.L., Balasoiu, M., 2011. Modeling of magnetodipolar striction in soft magnetic elastomers. Soft Matter. 7, 8484-8487. Suo, Z., Zhao, X., Greene, W.H., 2008. A nonlinear field theory of deformable dielectrics. J. Mech. Phys. Solids. 56, 467-486. Tian, T., Li, W., Deng, Y., 2011. Sensing capabilities of graphite based MR elastomers. Smart Mater. Struct. 20, 025022. Varga, Z., Filipcsei, G., Zrínyi, M., 2006. Magnetic field sensitive functional elastomers with tunable elastic modulus. Polymer 47, 227-233. Wu, J., Gong, X., Fan, Y. and Xia, H. 2010 Anisotropic polyurethane magnetorheological elastomer prepared through in situ polycondensation under a magnetic field. Smart Mater. Struct. 19, 105007. Wu, J., Gong, X., Fan, Y., Xia. H., 2011. Physically crosslinked poly(vinyl alcohol) hydrogels with magnetic field controlled modulus. Soft Matter, 7, 6205. 16 12/16/2011 Yin, H.M., Sun, L.Z., Chen, J.S., 2006. Magneto-elastic modeling of composites containing chainstructured magnetostrictive particles. J. Mech. Phys. Solids. 54, 975-1003. Zajac, P., Kaleta, J., Lewandowski, D., Gasperowicz, A., 2010. Isotropic magnetorheological elastomers with thermoplastic matrices: structure, damping properties and testing. Smart Mater. Struct. 19, 045014. Zhou, G., 2003. Shear properties of a magnetorheological elastomer. Smart Mater. Struct. 12, 139-146. Zrínyi, M., Barsi, L., Szabó, D., 1997 Direct observation of abrupt shape transition in ferrogels induced by nonuniform magnetic field. J. Chem. Phys. 106 (13), 5682-5692. 17 12/16/2011 Figures (a) (b) (c) Fig. 1. Sketches of three possible microscopic chain structures in MREs: (a) a straight chain, (b) a wavy chain, and (c) a helical chain. The geometric parameters are the particle diameter d , the horizontal inter-particle distance b , and the vertical distance h . 18 12/16/2011 5 3D 0 Em 2D -5 -10 -15 0 1 2 3 Fig. 2. The dimensionless magnetic contribution to the tensile modulus, as a function of the geometric parameter b h . The tensile moduli of MREs with 2D wavy chains and 3D helical chains are shown. The dashed curves show the approximate results with only the nearest neighbors accounted for. 19 12/16/2011 8 6 4 Case 1 Gm 2 0 Case 2 -2 0 1 2 3 Fig. 3. The contribution of magnetic dipolar interaction to the shear modulus of MREs with 2D wavy chains, as a function of the geometric parameter b h . The result is dependent on the direction of shear. For shearing perpendicular to the direction of magnetic moment (case 1), a straight chain ( 0 ) gives rise to positive MR effect, while the wavy chain structure of intermediate has negative MR effect. For shearing parallel to the magnetic moment (case 2), wavy chain shows positive MR effect. 20 12/16/2011 v v0 u0 u u0 Bx 0 Bx 0 v0 (b) (a) Fig. 4. (a) Schematic representation of the magnetic field applied on an MRE by a solenoid. A representative unit cell with uniform field and deformation is identified. (b) Symmetric boundary conditions are applied to the unit cell. 21 12/16/2011 1 1.05 0.8 1.04 h/d =1.1, =0.6 1.03 h/d =1.1, =0.8 h/d =1.1, =1.0 h/d =1.1, =0.4 E E0 0.6 E E0 0.4 0.2 h/d =1.1, =0 1.01 h/d =1.2, =0 1 h/d =1.3, =0 0 0 1.02 0.1 0.2 0.3 0.4 0.99 0.5 0 0.1 0.2 0.3 H 0 G0 H 0 G0 (a) (b) 0.4 0.5 Fig. 5. MR effect in tensile modulus of an MRE: (a) straight chains only give negative MR effect, which becomes smaller as the inter-particle distance increases; (b) wavy chains induce positive MR effect at a intermediate value of . 22 12/16/2011 1.8 h/d =1.1, =0 1.6 G Gi 1.4 h/d =1.1, =0.3 h/d =1.1, =0.6 h/d =1.1, =0.9 h/d =1.1, =1.2 1.2 1 0 0.1 0.2 0.3 0.4 0.5 H 0 G Fig. 6. MR effect in shear modulus of an MRE: straignt chains ( 0 ) give the largest MR effect while wavy chains ( 0 ) also induce positive MR effect. 23 12/16/2011 gap w overlap (a) (b) Fig. 7. Two representative microstructures of MREs with: (a) laterally aligned straight chains, and (b) overlapping straight chains, both having finite lengths. The geometries are characterized by the length of a chain, l , as well as the length L and width w of a unit cell. 24 12/16/2011 (a) (b) Fig. 8. Non-affine deformation in unit cells under magnetic fields: the inter-particle distance is shortened and the polymer matrix is stretched more in the gaps between chains. Magnetic induction fields are shown with streamlines. 25 12/16/2011 1 E E0 0.9 0.8 0.7 0 l/L =1 l/L =0.72 l/L =0.5 l/L =0.72 with overlap 0.1 0.2 0.3 0.4 0.5 H 0 G0 Fig. 9. MR effect of straight chains with gaps and overlaps. Only negative MR effect are induced, and the relative change in tensile modulus becomes smaller as the gap distance increases. 26 12/16/2011 0.3 0.25 E E0 0.2 0.15 0.1 1.5 =0.07 =0.08 =0.10 =0.13 =0.19 =0.26 E E0 H 2 1 0.5 0.05 0 0 0.1 0.2 0.3 0.4 0 0 0.5 0.1 0.2 H 0 G0 (a) (b) 0.3 Fig. 10. (a) The effect of filler volume fraction on the relative change of tensile modulus, plotted as a function of the normalized true magnetic field. The results are fitted to E E0 0 H 2 G0 , as shown by the solid curves. (b) The fitting coefficient is approximately linear in the filler volume fraction, . 27 12/16/2011