Math 317: Linear Algebra Homework 10 Solutions Due: November 20, 2015
advertisement

Math 317: Linear Algebra
Homework 10 Solutions
Due: November 20, 2015
The following problems are for additional practice and are not to be turned in: (All
problems come from Linear Algebra: A Geometric Approach, 2nd Edition by ShifrinAdams.)
Exercises: Section 4.3: 5a, 6, 7, 11, 13, 16, 17 Section 5.1 : 1, 3, 10, 11
Turn in the following problems.
1
1. Continuing the example from class, let V = span {v1 , v2 } where v1 = 0 , v2 =
1
1
1
1 . Recall that we found a basis for R3 by taking v3 = −2 ∈ V ⊥ .
−1
−1
(a) Find the standard matrix of the linear transformation T : R3 → R3 , if T (x) =
projV ⊥ (x). That is, calculate [projV ⊥ ]stand . Hint: Recall that for any x ∈ R3 ,
we have that x = projV (x) + projV ⊥ (x). Use the fact that Ix = x where I
is the identity transformation and your knowledge of [projV ]stand to calculate
[projV ⊥ ]stand .
5/6 2/6
1/6
From class, we recall that [projV ]stand = 2/6 2/6 −2/6. Using
1/6 −2/6 5/6
3
our knowledge that for x ∈ R we have that x = projV (x) + projV ⊥ (x).
This implies that projV ⊥ (x) = x − projV (x). Using the fact the
Ix = x where I is the identity transformation (so that
[I]stand =
1 0 0
I), we have that [projV ⊥ ]stand = I − [projV ]stand = 0 1 0 −
0 0 1
5/6 2/6
1/6
1/6 −2/6 −1/6
2/6 2/6 −2/6 = −2/6 4/6
2/6
1/6 −2/6 5/6
−1/6 2/6
1/6
(b) Calculate the matrix of the linear transformation T : R3 → R3 , if T (x) =
projV ⊥ (x) with respect to B, if B = {v1 , v2 , v3 }. That is, calculate [projV ⊥ ]B .
While we could use the change of basis formula to calculate [projV ⊥ ]B ,
it is actually less computationally intensive to compute [projV ⊥ ]B directly from its definition. Recalling that projV ⊥ (x) = x if x ∈ V ⊥ and
projV ⊥ (x) = 0 if x ∈ V , we have that projV ⊥ (v1 ) = projV ⊥ (v2 ) = 0
and projV ⊥ (v3 ) = v3 . Writing out the coordinates of each of these
vectors, we obtain:
1
Math 317: Linear Algebra
Homework 10 Solutions
Due: November 20, 2015
0 = 0v1 + 0v2 + 0v3
0 = 0v1 + 0v2 + 0v3
v3 = 0v1 + 0v2 + 1v3 ,
(1)
(2)
(3)
0 0 0
and so [projV ⊥ ]B = 0 0 0.
0 0 1
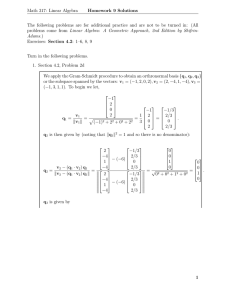
2. Section 4.3, Problem 5b
2
1
We consider the basis B = {v1 , v2 } for R2 where v1 =
and v2 =
.
3
2
Given the following linear transformation S : R2 → R2 defined by
S(v1 ) = 2v1 + v2
S(v2 ) = −v1 + 3v2 ,
we calculate [S]stand , the standard matrix for S. To do this, we first compute
[S]B and then use the change of basis formula.
Now, from above we have S(v1 ) and S(v2 ), and thus all that is left to do
is to compute the coordinates with respect to B. Note that we already
have S(v1 ) and S(v2 ) written
as a linear combination of the elements of
2 −1
B, thus [S]B =
. Now to find [S]stand we use the change of basis
1 3
formula which says that [S]stand = P [S]B P −1 , where the columns of P are
the vectors in the basis B. Thus, we have that
[S]stand
2 1
=
3 2
−1
2 −1 2 1
1 3
3 2
3. Section 4.3, Problem 9
Let T : R3 → R3 be the linear transformation which reflects a given vector
x across V where V = {(x1 , x2 , x3 ) : −x1 + x2 + x3 = 0}.We find a basis for
V by solving the linear equation associated with V . Letting x2 and x3 be
the free variables, we obtain
x1 = x2 +x
3 , x2 = x2 and x3 = x3 . Thus a basis
1
1
for V is given by v1 = 1 , v2 = 0. To find a nonzero vector v3 that is
0
1
orthogonal to both v1 and v2 , we find a basis for V ⊥ (which will consist of
one single vector v3 since V + V ⊥ = R3 ). Noting that the basis given above
2
Math 317: Linear Algebra
Homework 10 Solutions
Due: November 20, 2015
−1
1
1
is a basis
for
N
(A)
if
A
=
, we know that V ⊥ = R(A) and so
−1
v3 = 1 . Note that B = {v1 , v2 , v3 } forms a basis for R3 . To create an
1
orthogonal basis for R3 , we apply the Gram-Schmidt procedure to B. To
begin we let
1
w1 = v1 = 1 .
0
w2 is given by
1
1/2
1
1
(w1 · v2 )
w1 = 0 − 1 = −1/2 .
w 2 = v2 −
2
kw1 k
2
0
1
1
Finally, w3 is given by
−1
(w1 · v3 )
(w2 · v3 )
w3 = v3 −
w1 −
w2 = 1 .
2
kw1 k
kw2 k2
1
Next, we find [T ]B , where B = {w1 , w2 , w3 }. Recalling that T (x) =
projV (x) − projV ⊥ (x), we have that
T (w1 ) = projV (w1 ) − projV ⊥ (w1 ) = w1 = 1w1 + 0w2 + 0w3
T (w2 ) = projV (w2 ) − projV ⊥ (w2 ) = w2 = 0w1 + 1w2 + 0w3
T (w3 ) = projV (w3 ) − projV ⊥ (w3 ) = −w3 = 0w1 + 0w2 − 1w3
1 0 0
Thus, [T ]B = 0 1 0 .
0 0 −1
To find [T ]stand , we use the change of basis formula: [T ]stand = P [T ]B P −1 ,
where the columns of P are the vectors in the basis B. Thus, we have that
[T ]stand
−1
1 1/2 −1 1 0 0
1 1/2 −1
= 1 −1/2 1 0 1 0 1 −1/2 1 .
0
1
1
0 0 −1 0
1
1
4. Section 4.3, Problem 18
3
Math 317: Linear Algebra
Homework 10 Solutions
Due: November 20, 2015
(a) Proof : Suppose that c is any scalar. We show that cI is similar only
to itself. Suppose that cI is similar to a matrix A. Then there is a
nonsingular matrix P such that A = P (cI)P −1 =⇒ A = cP P −1 = cI.
So A = cI and hence cI is similar only to itself.
b 0
a 0
(b) To show that A =
is similar to B =
, we find a matrix
0 b
0a
p
p
1
2
P so that A = P BP −1 or AP = P B. Let P =
. Then AP =
p3 p 4
ap1 ap2
bp1 ap2
P B =⇒
=
. This implies that p1 = p4 = 0
bp3 bp4
bp3 ap4
and p2 and p3 is any scalar. One particular P that works in this case
0 1
is P =
.
1 0
2 1
2 0
(c) To show that A =
is not similar to B =
, we show that
0 2
0 2 p p
there is not a P = 1 2 such that AP = P B. By way of contradicp3 p4
tion, suppose that we could
find a nonsingular
P so that AP = P B.
2p1 + p3 2p2 + p4
2p1 2p2
Then AP = P B =⇒
=
=⇒ p3 =
2p3
2p4
2p3 2p4
p4 = 0 =⇒ P has a row of zeros and is hence singular, a contradiction.
So A is not similar to B.
(d) To show that A is not similar to any diagonal
matrix, we repeat
the
a 0
p1 p2
same argument as above letting B =
. Let P =
. Then
0 b
p3 p4
2p1 + p3 2p2 + p4
if A were similar to B, then AP = P B =⇒
=
2p3
2p4
ap1 bp2
=⇒ p3 = p4 = 0 thus making P a singular matrix, which
ap3 bp4
is not possible. Thus, A is not similar to any diagonal matrix.
5. Section 4.3, Problem 19
2
2
(a) Using
the fact that T : R → R isdefined by T (e1 ) = 8e1 − 4e2 =
8
9
and T (e2 ) = 9e1 − 4e2 =
, we have that
−4
−4
8
9
[T ]stand =
−4 −4
3
−1
and v2 = −e1 + e2 =
, we find
(b) Given v1 = 3e1 − 2e2 =
−2
1
[T ]B where B = {v1 , v2 } is a basis for R2 . This can be done via the
change of basis formula. Recalling that [T ]stand = P [T ]B P −1 where the
4
Math 317: Linear Algebra
Homework 10 Solutions
Due: November 20, 2015
columns of P contain the basis B, we have that
[T ]B = P
−1
−1 3 −1
8
9
3 −1
2 1
[T ]stand P =
=
.
−2 1
−4 −4 −2 1
0 2
(c) No, because under different bases the matrices for T are similar to each
other. If one such matrix is not diagonalizable, then neither is the rest.
(See Problem 18, part d)
6. Section 4.3, Problem 20
(a) True. Proof : Suppose that B is similar to A. Then there is a
nonsingular matrix P such that B = P AP −1 . This implies that
T
B T = (P AP −1 ) = (P −1 )T AT P T = (P T )−1 AT P T . Thus B T is similar
to AT with P T being the change of basis matrix.
0 1
0 0
(b) False. Let B =
and let A =
. Then B 2 = A = A2 and
0 0
0 0
so B 2 is similar to A2 since they are both the zero matrix. However,
B is not similar to A because rank(A) = 0 and rank(B) = 1 and rank
is a similarity invariant.
(c) True. Proof: Suppose that B is similar to A and that A is nonsingular.
We show that B is nonsingular. Now, since B is similar to A, we know
that there is a nonsingular matrix P such that B = P AP −1 . Note
that P AP −1 is the product of nonsingular matrices and so P AP −1 is
a nonsingular matrix. Of course, this is precisely B and hence B is
nonsingular.
2 1
2 0
(d) False. In class we showed that A =
was similar to B =
.
0 3
0 3
Notice that A is not symmetric whereas B is a symmetric matrix.
1 1
0 0
(e) False. Let A =
and B =
. A is similar to B through the
1 1 1
2
1 1
invertible matrix P =
. (Verify this!) However, A and B have
0 1
different nullspaces.
(f) True. Proof : Suppose that A is similar to B. Then there is a
nonsingular P such that A = P BP −1 . We recall from a previous homework that rank(A) = rank(AB) if B is nonsingular, and
rank(B) = rank(AB) if A is nonsingular. Equipped with these facts,
we find that rank(A) = rank(P (BP −1 )) = rank(BP −1 ) = rank(B)
since P and P −1 are both nonsingular.
7. Prove that the rank and trace of a matrix are similarity invariants. That is
rank(An×n ) = rank(Bn×n ) and trace(An×n ) = trace(Bn×n ) when A is similar to
5
Math 317: Linear Algebra
Homework 10 Solutions
Due: November 20, 2015
B.
Proof: In the previous problem, we have shown that rank is a similarity
invariant. To prove that the trace is a similarity invariant, we recall that
for any two n × n matrices, trace(AB) = trace(BA). Suppose that A is
similar to B. Then there is a nonsingular matrix P such that A = P BP −1 .
Thus trace(A) = trace((P B)P −1 ) = trace(P −1 P B) = trace(B).
8. Section 5.1, Problem 1a
−1 3 5
We calculate det 6 4 2 as follows:
−2 5 1
−1 3 5
−1 3
5
−1 3
5
det 6 4 2 = det 0 22 32 = − det 0 −1 −9
−2 5 1
0 −1 −9
0 22 32
−1 3
5
= − det 0 −1 −9 = 166
0
0 −166
9. Section 5.1, Problem 2
Proof : Suppose that one row of an n × n matrix A consists only of 0 entries.
That is,
A1
A2
..
.
A = 0 ,
.
..
An−1
An
where Ai is the ith row of A. Write the 0 row as A1 − A1 . Then
A1
A2
..
.
A1
A2
..
.
A1
A2
..
.
A1
A2
..
.
det A = det 0 = A1 − A1 = det A1 − det A1 = 0
.
.
.
..
..
..
..
.
An−1 An−1
An−1
An−1
An
An
An
An
6