Proceedings of BIO2006 2006 Summer Bioengineering Conference
advertisement

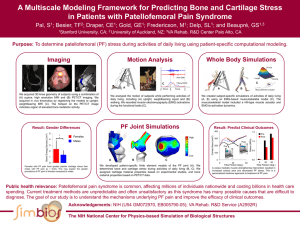
Proceedings of BIO2006 2006 Summer Bioengineering Conference June 21-25, Amelia Island Plantation, Amelia Island, Florida, USA BIO2006-XXXXX KNEE CARTILAGE CONTACT DETERMINATION USING WEIGHTBEARING MRI Peter J Barrance, Thomas S Buchanan Center for Biomedical Engineering Research University of Delaware Newark, DE 19716 INTRODUCTION Injuries to the knee joint can alter the functional positioning of the tibiofemoral joint, and hence the loading of the associated contact surfaces. Such changes have been implicated in theories of the etiology of osteoarthritis that often follows anterior cruciate ligament (ACL) rupture. Assessment of the relative importance of such effects requires the ability to make precise measurements of joint and cartilage positioning. The potential for magnetic resonance imaging (MRI) in this has been recognized in earlier studies that have used closed and open scanners to study knee kinematics. Here, we build on our earlier work using an open scanner that allows scanning during weightbearing. We introduce a method to calculate the location of cartilage contact areas relative to coordinate systems that are placed consistently through changes in experimental conditions, and use it to describe the joint positioning and contact changes in the knees of an ACL-deficient subject. NY) can be varied continuously between the horizontal position and nearly vertical, changing the fraction of bodyweight that loads the joint. After scan localization, sagittal plane images were acquired for each knee in conditions of minimal weightbearing (angle of table from horizontal = 20°) and high weightbearing (table angle =85°) (Fig. 1). Thirty slices, spaced 3.3 mm between centers, with 3mm slice thickness and a 25 cm field of view, were acquired for each knee at each table angle. Digitization of bone and cartilage Distal femoral and proximal tibial bone surfaces, as well as medial and lateral compartment cartilage surfaces were digitized in each scan independently by two operators. A digitizing tablet was used by the first operator, whereas a digitizing LCD screen was used by the second. Each operator digitized only bone and cartilage surfaces that could be defined clearly in the images. Custom software was used to project the digitized points into physical space coordinates, based on the scaling and position information in the header of each image. MATERIALS AND METHODS Scanning A 46 year old male subject, who had sustained a complete tear to one anterior cruciate ligament six months prior to examination, was recruited for this study. Before examination, the subject read and signed an institutionally approved statement of informed consent. All scans were performed at 20° knee flexion - an angle that requires active muscle contraction for weight support, yet is well tolerated by subjects for the scan duration required (approximately 6.5 minutes). Before the experiment, the 20° flexion position was determined using a goniometer to measure between bony landmarks of the hip, knee, and ankle. This position was reproduced in the scanner by alignment of lines drawn on the medial ankle. The inclination of the patient table of the scanner used (0.6T Upright MRI, Fonar Corporation, Melville, Cartilage proximity calculation and display The distance of the closest point on the femoral cartilage to each point on the tibial cartilage was calculated using a tree-sort based closest point algorithm implemented in Matlab (The Mathworks, Natick, MA). Regions of contact were defined over areas of femoral cartilage that lay within a threshold distance of 2 mm from the tibial cartilage, and centers of contact were calculated as the centroid of all points within this region. For display purposes, a mesh model of the tibial cartilage surface was constructed from the digitized points, and this was color-coded and rendered to indicate cartilage proximity (Fig. 2). 1 Copyright © 2006 by ASME Coordinate system placement and matching For comparison of contact point center locations between knees and loading conditions, it was important to describe these locations in a coordinate system that was placed consistently relative to the anatomy. A reference tibial plateau coordinate system was first defined by a single operator relative to a model of the tibia from one scan set (uninjured knee, 20° flexion). This system was assigned using a medial/lateral axis that bisected points digitized on the medial and lateral margins of the tibial plateau, an anterior/posterior axis that was parallel to a line connecting two points digitized on the anterior and posterior margins in the mid-medial compartment of the tibial plateau, and superior/inferior axis that was perpendicular to both of those axes. A point-matching method, implemented in Matlab, was then used to find optimal mapping transformations of the reference tibial bone surface points to those in each of the other experimental conditions. Lateral symmetry of bone surfaces was assumed, in order to allow mapping between sides by reversal of the medial/lateral coordinate. These mapping transformations were used to transform the reference coordinate system into correspondence with the bone in the remaining three experimental conditions, after which the coordinates of the contact positions were calculated were calculated relative to this system. Additionally, joint positioning parameters were calculated [1], after using a similar method of coordinate placement and matching for the femur. a b Figure 1: Sample images from the ACL-injured knee. (a) Table set at 20° from horizontal (minimal weightbearing) (image has been rotated to vertical orientation for comparison). (b) Image acquired with the table near vertical (high weightbearing). Anterior subluxation of the tibia is evident and highlighted by the white arrow. a b RESULTS Table 1: Positioning parameters and centers of tibial cartilage contact. UN: Uninjured side, IN: ACL-injured side. 20/90°: table angle; ∆: change from 20° to 90°. Flexion, Varus, Int. rot, A/P: joint positioning parameters; ‘Med/Lat C’: A/P coordinate of center of contact on medial/lateral compartment. ‘X/Y’: X – avg. of operators’ results, Y difference between operators’ results. UN 20° 90° IN 20° 90° ∆ ∆ Flexion (°) 16.3 14.5/2.4 -1.8/2.4 12.1/2.3 12.7/1.0 0.6/1.3 Varus (°) -2.6 -2.3/0.5 0.3/0.5 -3.5/0.6 -5.1/0.3 -1.6/0.4 Int.rot (°) 2.0 6.2/0.4 4.2/0.4 -0.8/0.9 -0.7/0.2 0.1/0.7 A/P (mm) -1.8 3.4/0.4 5.2/0.4 0.7/0.1 9.4/2.1 8.8/2.1 Med C (mm) 3.0/0.1 0.5/0.1 -2.5/0.0 -0.6/0.0 -7.2/1.2 -6.6/1.2 Figure 2: Tibial plateau models, coordinate systems, and cartilage proximity distributions for the ACL-deficient knee in (a) minimal weightbearing, and (b) high weightbearing conditions. Cartilage proximity (mm) is indicated by color coding according to scale at right. White dots denote locations of estimated centers of cartilage contact in each compartment. Lat C (mm) -1.2/0.5 -3.7/0.5 -2.5/1.0 -0.2/0.1 -4.4/0.5 -4.2/0.6 with tibial anterior translation, posterior migration of the medial and femoral contact centers of the tibial cartilage were recorded (Fig. 2); however, these displacements were in all cases smaller than the same knee’s anterior translation. Significant internal rotation was recorded in the transition to weightbearing in only the uninjured knee. Technique repeatability The differences in parameter values between operators, as indicated by the second number in each pair in Table 1, are below 2.5° for all angular variables, and below 2.5 mm for all positional variables. The changes in transition from low weightbearing to high weightbearing in the descriptors of tibial displacement and contact position (i.e. A/P, Med C, Lat C) are several times higher than the inter-operator differences, and the technique appeared sufficiently robust to these differences to allow comparison of measurements of tibial contact position. DISCUSSION These early results demonstrate the potential of this technique to provide measures of tibiofemoral joint contact conditions in the presence of true physiologic loading. Operator-related effects on the results were small compared with the consistent changes seen. More extensive validation and development work on the technique is in progress. A potentially deleterious increase in anterior tibial translation and posterior migration of contact regions on the tibial cartilage were measured in the injured knee of this ACL-deficient subject. Tibiofemoral positioning and contact The flexion angles recorded from the analysis were lower than the 20° flexion intended. This discrepancy may be a result of the somewhat imprecise nature of goniometer-based positioning, as well as an effect of bone coordinate system choice. Little change in flexion angle was seen in each knee in the transition to higher weightbearing. Anterior translation after the application of weightbearing was seen in both knees, and was larger in the ACL-deficient knee. Concomitant REFERENCES [1] Grood, E. S., and W. J. Suntay, 1983, "A Joint Coordinate System for the Clinical Description of Three-Dimensional Motions: Application to the Knee," J Biomech Eng, 105(2), pp. 136-44. 2 Copyright © 2006 by ASME