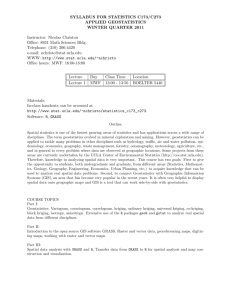
Kriging with anisotropy
Geometric anisotropy:
0
5000
Gamma(h)
10000 15000 20000
Range longer in one direction than another
Nugget and (partial) sill same in all directions
Fix by rotating / rescaling coordinate system
krige() does automatically when you’ve fit an anisotropic SV
20000
40000
60000
Distance
c Philip M. Dixon (Iowa State Univ.)
80000
Spatial Data Analysis - Part 5
Spring 2016
1 / 25
Kriging with anisotropy
Zonal anisotropy
variogram sills vary with direction
The direction with the shorter range also has the shorter sill.
model by a combining an isotropic model and a model which depends
“only on the lag-distance in the direction θ of the greater sill”
(Schabenberger and Gotway, 2005, p 152).
γ(h ) = γ1 (|| h ||) + γ2 (hθ )
Chiles and Delfiner (1999, p. 96) warn against axis-specific models,
e.g.: γ(h ) = γ1 (hx ) + γ2 (hy )
Under certain circumstances they can lead to Var Z (s) = 0, which not
good.
“fake it” by setting up a geometrically anisotropic component with a
major axis much much longer than the minor axis
Only distances only along the major axis contribute to γ(h )
c Philip M. Dixon (Iowa State Univ.)
Spatial Data Analysis - Part 5
Spring 2016
2 / 25
Other types of Kriging
Measurement error kriging
Observations have measurement error
Different interpretation of nugget
Local prediction
Speed up / make possible computations for large problems
Block kriging
Predict average for an area
Log Normal or Trans-Gaussian kriging
Observations have skewed distributions
Indicator kriging / Disjunctive kriging
Predict probability of an event
Cokriging
exploit correlations between two variables
c Philip M. Dixon (Iowa State Univ.)
Spatial Data Analysis - Part 5
Spring 2016
3 / 25
Measurement error kriging
Remember the effect of the nugget:
At the location of an observed value, Ẑ (s) = Z (s).
and Var Ẑ (s) = 0 at that location
2
but any small distance away from that s, Var Z (s + h) = σnugget
Kriging “honors the data”
Assumes that a hypothetical repeat observation at s will be exactly
the same number
What if there is measurement error in Z (s)?
A repeat measurement at same location will not be the same value.
c Philip M. Dixon (Iowa State Univ.)
Spatial Data Analysis - Part 5
Spring 2016
4 / 25
Measurement error kriging
Now, do not want to honor the data (because what we observe
includes non-repeatable measurement error)
Identification problem: have only one obs. per location.
Can not separate nugget from measurement error
Need outside information / guess about the magnitude of the
measurement error
Or information about the magnitude of small-scale variation
e.g., have closely spaced pairs
can believe that that apparent nugget is just measurement error
c Philip M. Dixon (Iowa State Univ.)
Spatial Data Analysis - Part 5
Spring 2016
5 / 25
Measurement error kriging
2
If you “know” σmeas.
error ,
then can account for this when kriging
Consequence is that prediction at observed locations is a “smoothed”
version of the observations.
Consider a pure nugget process:
Simple example that demonstrates the difference between kriging with
a nugget and kriging with measurement error
no spatial correlation at the spatial scale of the observations
SV is flat for all non-zero distances: γ(d) = σ 2 , d > 0.
nugget / meas. error have different γ(0)
Consider three alternatives:
100% nugget: γ(0) = 0, γ() = σ 2
50% nugget, 50% meas. error: γ(0) = σ 2 /2, γ() = σ 2
100% meas. error: γ(0) = σ 2 , γ() = σ 2
c Philip M. Dixon (Iowa State Univ.)
Spatial Data Analysis - Part 5
Spring 2016
6 / 25
Measurement error kriging
All 3 cases:
prediction is the mean value except at the observed locations
because no spatial structure (pure nugget)
Different predictions at the observed locations
Example: Z (s i ) = 1, µ̂ = 3
Nugget Meas. error.
100
0
50
50
0
100
Pictures on next three slides
c Philip M. Dixon (Iowa State Univ.)
Ẑ (s i )
1
2
3
Spatial Data Analysis - Part 5
Var Ẑ (s i )
0
0.31
0.25
Spring 2016
7 / 25
5.0
4.5
4.0
3.5
3.0
2.5
2.0
1.5
1.0
c Philip M. Dixon (Iowa State Univ.)
Spatial Data Analysis - Part 5
Spring 2016
8 / 25
5.0
4.5
4.0
3.5
3.0
2.5
2.0
1.5
1.0
c Philip M. Dixon (Iowa State Univ.)
Spatial Data Analysis - Part 5
Spring 2016
9 / 25
5.0
4.5
4.0
3.5
3.0
2.5
2.0
1.5
1.0
c Philip M. Dixon (Iowa State Univ.)
Spatial Data Analysis - Part 5
Spring 2016
10 / 25
Local prediction
Currently, using all observations to make predictions
0
Ẑ (s i ) = µ̂ + σ Σ−1 (Z (s ) − µ̂)
Only have to compute Σ−1 once
What if you:
have many observations (e.g. 10,000): Σ likely too large
believe µ varies (and you don’t want to model that change)
use only nearby obs. to predict at a location
This is called “local prediction”
Either use some max. # obs., or all obs. within some specified
distance of prediction location.
Need to compute Σ−1 separately for each prediction
because different “data” being used each time
but Σ much much smaller each time
c Philip M. Dixon (Iowa State Univ.)
Spatial Data Analysis - Part 5
Spring 2016
11 / 25
Block Kriging
To now, we’ve focused on predicting
Z (s ) for individual locations
locations assumed to be points w/o area
(physical/mathematical simplification, not reality)
Sometimes called Punctual Kriging (for points)
In many applications, want to predict mean or total over some area
total and mean interconvertable: total = mean*area
Areas are not undividable units
experiment on people. A person is a clearly defined, undividable unit
experiment in a field. You choose the plot size - no clearly defined
undividable unit
Called the Modifiable Areal Unit Problem
both size and shape of area matter
inferences depend on both
e.g. Variance between “replicate” field plots depends on size and shape
c Philip M. Dixon (Iowa State Univ.)
Spatial Data Analysis - Part 5
Spring 2016
12 / 25
Block Kriging
MAUP is one example of a “change of support” problem (COSP)
Support: size, shape, and orientation of a unit associated with a
measurement
Changing support, e.g. by averaging or aggregating,
creates new random variables (for the new plots)
related to original r.v’s, but spatial and statistical properties are
different
e.g. semivariogram parameters will change
Block Kriging is a second ex. of a COSP
Define block average, Z (B), for block B with area | B |:
Z
1
Z (B) =
Z (s) ds
|B| B
Want to predict Ẑ (B)
not Ẑ (s) at the center of the area
0
because weights, σ Σ−1 , are non-linear functions of location
c Philip M. Dixon (Iowa State Univ.)
Spatial Data Analysis - Part 5
Spring 2016
13 / 25
Block Kriging
In practice:
predict at a grid of point locations within B, and average:
Z (B) = Σλi Z (s i )
choose λi to minimize MSEP
like OK, but based on “point-to-block” covariances
Z
1
Cov (Z (B), Z (s i )) =
Cov (Z (u), Z (s i )) du
|B| B
Again, approx. by setting up a grid of pts in B:
Cov (Z (B), Z (s i )) =
1X
Cov (Z (uj ), Z (s i ))
J
j
Software takes care of all these details
c Philip M. Dixon (Iowa State Univ.)
Spatial Data Analysis - Part 5
Spring 2016
14 / 25
Spring 2016
15 / 25
Spring 2016
16 / 25
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
c Philip M. Dixon (Iowa State Univ.)
Spatial Data Analysis - Part 5
Block Kriging
Prediction variance for block kriging
Block average, Z (B), is an average!
estimated more precisely than is a single point.
Variance is not σ 2 / | B |
(i.e. analogous to σ 2 /n )
because of spatial correlation within the block
but still smaller, especially for:
large blocks
small range
not far from observed locations:
Ẑ (s) ≈ µ̂, so very highly correlated within block.
My thoughts:
What, specifically, do you want to predict / map?
Block kriging not as often used as it should be
c Philip M. Dixon (Iowa State Univ.)
Spatial Data Analysis - Part 5
Non-linear Kriging
reminder: Best predictor (smallest MSEP) is E [Z (s 0 ) | Z (s )]
Gaussian: linear function of observations: Σλi Z (s i )
Other distributions:
still want E [Z (s 0 ) | Z (s )]
no longer a linear fn of obs.
Often see skewed ecological / environmental data.
few really large values, other values close to mean
Most common non-Gaussian distribution: log normal
very appropriate for positively skewed data
log Z (s i ) ∼ Gaussian, i.e. log Z (s i ) ∼ N(µl , σl2 )
parameters estimated by “usual” applied to log Z
c Philip M. Dixon (Iowa State Univ.)
Spatial Data Analysis - Part 5
Spring 2016
17 / 25
Spring 2016
18 / 25
Non-linear Kriging
Log Normal kriging
log transform Z (s )
[
predict P(s 0 ) = log
Z (s 0 ) (on log scale)
back transform: Ẑ (s 0 ) = exp P(s 0 )
P(s 0 ) is an unbiased prediction of log Z (s 0 )
but exp P(s 0 ) is a biased predictor of Z (s 0 ).
(Jensen’s inequality)
c Philip M. Dixon (Iowa State Univ.)
Spatial Data Analysis - Part 5
Log normal Kriging
Solutions:
1) Ignore the problem, focus on medians
exp P(s 0 ) is an asymptotically unbiased estimate of median Z (s 0 ).
2) Use properties of logN distribution
when log Z (s 0 ) ∼ N(µl , σl2 ),
E Z = exp(µl + σl2 /2)
Apply to exp P̂(s 0 ):
h
i
E Ẑ (s 0 ) = E exp P̂(s 0 ) = exp P̂(s 0 ) + Var P̂(s 0 )/2
Log normal kriging procedure:
use OK on log transformed values
back-transform prediction
apply correction
c Philip M. Dixon (Iowa State Univ.)
Spatial Data Analysis - Part 5
Spring 2016
19 / 25
Trans-Gaussian Kriging
log is one member of the Box-Cox family of transformations. For
these
(
Z (s λ −1
λ 6= 0
λ
Z ∗ (s ) =
log Z (s ) λ = 0
λ = 1 ⇒ no transformationp
λ = 0.5 ⇒ proportional to Z (s 0 ) transformation
λ = −1 ⇒ proportional to 1/Z (s 0 ) transformation
purpose of −1/λ is to make function continuous
λ
limit of Z λ−1 as λ → 0 is log Z
Why transform?
Intent is that Z ∗ (s 0 ) are Gaussian, or at least symmetric
Optimal properties of kriging for Gaussian data
MSEP makes most sense for symmetric distribution of values
Fitting covariates (UK) makes most sense for symmetric distribution of
residuals
c Philip M. Dixon (Iowa State Univ.)
Spatial Data Analysis - Part 5
Spring 2016
20 / 25
Indicator Kriging
What if you want to predict an exceedance probability,
P[Z (s 0 ) > threshold ]
e.g. legal limit on concentration of mercury in fish
Kriging predicts E [Z (s 0 ) | Z (s )]
Define Z ∗ (s 0 ) = I (Z (s 0 ) > threshold )
Z ∗ (s 0 ) = 1 if condition is true (Z (s 0 ) > threshold )
Z ∗ (s 0 ) = 0 if condition is false (Z (s 0 ) ≤ threshold )
E Z ∗ (s 0 ) = P[Z (s 0 ) > threshold ]
Apply indicator transformation to all obs,
estimate semivariogram from indicator variables (can be hard)
then krige.
Note: Data used are indicator values
so IK predictions are E Z ∗ (s 0 ) | Z ∗ (s)
not the same as E Z ∗ (s 0 ) | Z (s) because the indicator transformation
“throws away” information.
c Philip M. Dixon (Iowa State Univ.)
Spatial Data Analysis - Part 5
Spring 2016
21 / 25
Indicator Kriging
Issues:
no guarantee that 0 ≤ p ≤ 1
remember, Ẑ (s 0 ) can exceed range of data
variety of ad-hoc fixes
there are more complicated methods
my general sense is they don’t work markedly better
Extension: if you have P[Z > 1], P[Z > 2], . . ., you have an
approximation the cdf of Z
A bit more detail:
Define Z1 (s) to be I (Z (s) < k1 ),
and Z2 (s) to be I (Z (s) < k2 ),
for many values of k
gives you predictions of F̂ (k1 ), F̂ (k2 ), . . .
c Philip M. Dixon (Iowa State Univ.)
Spatial Data Analysis - Part 5
Spring 2016
22 / 25
Disjunctive Kriging
Define indicators for non-overlapping regions
e.g. Z (s 0 ) < 10, 10 ≥ Z (s 0 ) < 20, 20 ≥ Z (s 0 ) < 30, . . .
not Z (s 0 ) < 10, Z (s 0 ) < 20, Z (s 0 ) < 30, . . .
Knowing 10 ≥ Z (s 0 ) < 20 is more informative than knowing only
that Z (s 0 ) < 20 (IK)
very elegant math (which we’ll ignore)
→ predict any function g (Z (s 0 )), including the set of indicator
functions
Examples: Richard Webster has published a lot of ag-related studies
Only implementation in R (2016) is in the geostat library
Note: can combine block kriging ideas with any of the non-linear
kriging methods
e.g. define 1km x 1km areas and estimate P[soil N > threshold]
c Philip M. Dixon (Iowa State Univ.)
Spatial Data Analysis - Part 5
Spring 2016
23 / 25
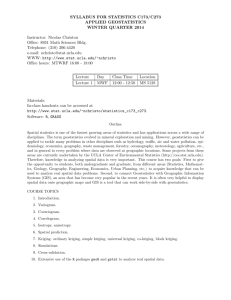
Cokriging
Two (or more) spatial variables
Correlated when measured at same location: Cov Z1 (s ), Z2 (s )
Each is spatially correlated: Cov Z1 (s ), Z1 (s + h )
Also spatial cross-correlation: Cov Z1 (s ), Z2 (s + h )
Concepts:
estimate that cross correlation by cross semivariogram
use to improve predictions of Z1 and/or Z2
Thoughts based on my limited experience:
do not need to measure Z1 and Z2 at same locations
use fine grid to predict a sparsely observed, but correlated, value
Picture on next slide
If Z2 measured at each prediction point, use UK instead of co-kriging
c Philip M. Dixon (Iowa State Univ.)
Spatial Data Analysis - Part 5
Spring 2016
24 / 25
1.0
Cokriging
+
Y coordinate
0.4
0.6
0.8
+
+
+
+
0.2
+
+
+
0.0
+
0.0
c Philip M. Dixon (Iowa State Univ.)
+
0.2
0.4
0.6
X coordinate
Spatial Data Analysis - Part 5
0.8
1.0
Spring 2016
25 / 25
 0
0