Modeling Landslide Occurrence and Impacts in a
M^SS^CHU
Changing Climate
OF TE ~CHNOLOGY
[7nr
by
Erin Leidy
07 201
B.S., Fordham University (2012)
LIB RARIES
Submitted to the Engineering Systems Division
in partial fulfillment of the requirements for the degree of
Master of Science in Technology and Policy
at the
MASSACHUSETTS INSTITUTE OF TECHNOLOGY
September 2014
@Erin Leidy. All rights reserved.
The author hereby grants to MIT and the Charles Stark Draper
Laboratory permission to reproduce and to distribute publicly paper
and electronic copies of this thesis document in whole or in part in any
medium now known or hereafter created.
Signature redacted
A u th o r ................................................................
Engineering Systems Division
August 23, 2014
Signature redacted
C ertified by .
.......................
Cathy Slesnick
Senior Member of the Technical Staff, The Charles Stark Draper
Signature redacted
Certified by
Acptpd b
.
Laboratory
Thesis Supervisor
................
C. Adam Schlosser
Senior Research Scientist, Center for Global Change Science
Thesis Supervisor
Ririn tiH r- r mr tc i
I
I
y . ..
I
~U
I
I
~U
. . . . . . . . . . . . . . . . . . .. ..
Dava J. Newman
Professor of Aeronautics and Astronautics and Engineering Systems
Director, Technology and Policy Program
2
Modeling Landslide Occurrence and Impacts in a Changing
Climate
by
Erin Leidy
Submitted to the Engineering Systems Division
on August 23, 2014, in partial fulfillment of the
requirements for the degree of
Master of Science in Technology and Policy
Abstract
In the coming years and decades, shifts in weather, population, land use, and other
human factors are expected to have an impact on the occurrence and severity of landslides. A landslide inventory database from Switzerland is used to perform two types
of analysis. The first presents a proof of concept for an analogue method of detecting
the frequency in landslide activity with future climate change conditions. Instead
of relying on modeled precipitation, it uses composites of atmospheric variables to
identity the conditions that are associated with days on which a landslide occurred.
The analogues are compared to relevant meteorological variables in MERRA reanalysis data to achieve a success rate of over 50% in matching observed landslide days
within 7 days. The second analysis explores the effectiveness of machine learning as a
technique to evaluate the likelihood of a slide to create high damage. The algorithm is
tuned to accommodate unbalanced data, extraneous variables, and variance in voting
to achieve the best predictive success. This method provides an efficient way of calculating vulnerability and identifying the spatial and temporal factors which influence
it. The results are able to identify high damage landslides with a success of upwards
of 70%. A machine-learning based model has the potential for use as a policy tool to
identify areas of high risk.
Thesis Supervisor: Cathy Slesnick
Title: Senior Member of the Technical Staff, The Charles Stark Draper Laboratory
Thesis Supervisor: C. Adam Schlosser
Title: Senior Research Scientist, Center for Global Change Science
3
4
Acknowledgments
Numerous thanks to the many who have provided support, encouragement, and advice throughout the writing of this thesis and my time at MIT.
First, my advisors, Dr. Cathy Slesnick and Dr. Adam Schlosser, and also to Dr. Natalya Markuzon, for their consistent guidance and support throughout this project.
Their expertise and advice have been vital to the learning experience that this research has been.
I would like to thank my friends and classmates in the Technology and Policy Program at MIT, for consistently being a source of inspiration and support. You are all
amazing and have been a highlight of my time in Boston. I will treasure the memories.
Final thanks to my family, without whose encouragement I would certainly not be
where I am now. My appreciation of their unwavering support and love is immeasurable.
This thesis was prepared at the Charles Stark Draper Laboratory, Inc., under Project
24254-001, IDS.
5
6
Contents
0.1
1
Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
An Analogue Method to Detecting Landslide Response to Climate
Change: Proof of Concept
19
1.1
Background .......
1.2
Methodology .......
1.3
D ata . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
22
1.3.1
Observed Landslides
. . . . . . . . . . . . . . . . . . . . . . .
22
1.3.2
NASA-MERRA . . . . . . . . . . . . . . . . . . . . . . . . . .
22
1.3.3
Data Processing . . . . . . . . . . . . . . . . . . . . . . . . . .
24
1.4
1.5
2
16
Application
................................
...............................
19
21
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
24
1.4.1
Creating the Composites . . . . . . . . . . . . . . . . . . . . .
24
1.4.2
Analogue Determination . . . . . . . . . . . . . . . . . . . . .
33
1.4.3
Success Rate
. . . . . . . . . . . . . . . . . . . . . . . . . . .
39
Discussion and Future Work . . . . . . . . . . . . . . . . . . . . . . .
40
Modeling the Damage Incurred by Landslides
43
2.1
Background . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
43
2.1.1
Vulnerability Analysis
. . . . . . . . . . . . . . . . . . . . . .
43
2.1.2
Machine Learning Approach . . . . . . . . . . . . . . . . . . .
45
2.1.3
Random Forest Algorithm . . . . . . . . . . . . . . . . . . . .
47
2.2
M ethodology
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
48
2.3
D ata . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
49
2.3.1
50
The Swiss Flood and Landslide Database . . . . . . . . . . . .
7
.55
2.4
2.3.2
NASA SEDAC
2.3.3
GDP .......
2.3.4
Weather Data ......
2.3.5
Transportation Data .......................
2.3.6
Buildings
2.3.7
Land Cover . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A pplication
..........................
51
................................
52
...........................
53
53
. . . . . . . . . . . . . . . . . . . . . . . . . . . .
55
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
55
2.4.1
Determining Important Variables . . . . . . . . . . . . . . . .
56
2.4.2
Unbalanced Data . . . . . . . . . . . . . . . . . . . . . . . . .
66
2.4.3
Voting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
76
2.4.4
Separation into Seasons
. . . . . . . . . . . . . . . . . . . . .
81
2.5
Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
82
2.6
Discussion and Future Work . . . . . . . . . . . . . . . . . . . . . . .
84
3 Using Landslide Risk Models in a Policy Context: Best Practice and
Recommendations
87
3.1
Rationale for Using a Model of Vulnerability . . . . . . . . . . . . . .
87
3.2
Potential Uses . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
88
3.3
M odel Application
90
. . . . . . . . . . . . . . . . . . . . . . . . . . . .
A Damage Modeling in Oregon
93
A .0.1 D ata . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A .0.2 M odeling
93
. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
103
A .0.3 Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
103
B Variable Importance Results
105
B.0.4 KS-Test results . . . . . . . . . . . . . . . . . . . . . . . . . .
B.0.5
105
Sensitivity analysis results, removing one variable at a time. . 110
B.0.6 Sensitivity analysis results, removing all of one type of variable,
and adding in one variable individually. . . . . . . . . . . . . .
8
116
List of Figures
1-1
Number of landslides in Switzerland per month, period 1979-2012.
23
1-2
Swiss landslides by date, 1979-2012.
23
1-3
Composites of all Swiss DJF slide dates. The colors of a) show the
. . . . . . . . . . . . . . . . . .
standardized anomaly of 500-hpa geopotential height (Z500) and the
arrows show vertical integral atmospheric vapor flux. The colors of b)
show total precipitable water (TPW) and the contour lines are 500-hpa
vertical pressure velocity (w500).
1-4
. . . . . . . . . . . . . . . . . . . .
25
Composites of all Swiss JJA slide dates. The colors of a) show the
standardized anomaly of 500-hpa geopotential height (Z500) and the
arrows show vertical integral atmospheric vapor flux. The colors of b)
show total precipitable water (TPW) and the contour lines are 500-hpa
vertical pressure velocity (w500).
1-5
. . . . . . . . . . . . . . . . . . . .
26
Composites of all Swiss DJF slide dates with 2-day period. The colors
of a) show the standardized anomaly of 500-hpa geopotential height
(Z500) and the arrows show vertical integral atmospheric vapor flux.
The colors of b) show total precipitable water (TPW) and the contour
lines are 500-hpa vertical pressure velocity (w500).
1-6
. . . . . . . . . .
27
Composites of all Swiss DJF slide dates with 5-day period. The colors
of a) show the standardized anomaly of 500-hpa geopotential height
(Z500) and the arrows show vertical integral atmospheric vapor flux.
The colors of b) show total precipitable water (TPW) and the contour
lines are 500-hpa vertical pressure velocity (w500).
9
. . . . . . . . . .
27
1-7
Composites of all Swiss DJF slide dates with 7-day period. The colors
of a) show the standardized anomaly of 500-hpa geopotential height
(Z500) and the arrows show vertical integral atmospheric vapor flux.
The colors of b) show total precipitable water (TPW) and the contour
lines are 500-hpa vertical pressure velocity (w500).
1-8
. . . . . . . . . .
28
Composites of all Swiss DJF slide dates with 10-day period. The colors
of a) show the standardized anomaly of 500-hpa geopotential height
(Z500) and the arrows show vertical integral atmospheric vapor flux.
The colors of b) show total precipitable water (TPW) and the contour
lines are 500-hpa vertical pressure velocity (w500).
1-9
. . . . . . . . . .
28
Composites of all Swiss DJF slide dates with 14-day period. The colors
of a) show the standardized anomaly of 500-hpa geopotential height
(Z500) and the arrows show vertical integral atmospheric vapor flux.
The colors of b) show total precipitable water (TPW) and the contour
lines are 500-hpa vertical pressure velocity (w500).
. . . . . . . . . .
29
1-10 Composites of all Swiss DJF slide dates with 30-day period. The colors
of a) show the standardized anomaly of 500-hpa geopotential height
(Z500) and the arrows show vertical integral atmospheric vapor flux.
The colors of b) show total precipitable water (TPW) and the contour
lines are 500-hpa vertical pressure velocity (w500).
. . . . . . . . . .
29
1-11 Peak Standardized Anomaly of Composite Z500 for Various Time Spans.
The trough (negative anomaly, here labeled as min), and ridge (positive anomaly, here labeled as max) are both variables of interest and
so are included.
. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
30
1-12 Peak Standardized Anomaly of Composite w500 for Various Time Spans. 30
1-13 Peak Standardized Anomaly of Composite TPW for Various Time Spans. 31
10
1-14 Composites of all Swiss DJF slides that incurred high damage. The colors of a) are the standardized anomaly of 500-hpa geopotential height
(Z500) and the arrows show vertical integral atmospheric vapor flux.
The colors of b) show total precipitable water (TPW) and the contour
lines are 500-hpa vertical pressure velocity (w500).
. . . . . . . . . .
32
1-15 Composites of all Swiss DJF slides that incurred low damage. The colors of a) are the standardized anomaly of 500-hpa geopotential height
(Z500) and the arrows show vertical integral atmospheric vapor flux.
The colors of b) show total precipitable water (TPW) and the contour
lines are 500-hpa vertical pressure velocity (w500).
. . . . . . . . . .
32
1-16 Spatial Correlation of Z500. . . . . . . . . . . . . . . . . . . . . . . .
34
1-17 Density Plot of Z500 spatial correlation.
. . . . . . . . . . . . . . . .
34
1-18 Spatial Correlation of w500. . . . . . . . . . . . . . . . . . . . . . . .
35
1-19 Density Plot of w500 spatial correlation.
. . . . . . . . . . . . . . . .
35
1-20 Spatial Correlation of TPW. . . . . . . . . . . . . . . . . . . . . . . .
36
1-21 Density Plot of TPW spatial correlation. . . . . . . . . . . . . . . . .
36
2-1
2-2
Depiction of the steps to create a supervised classification model. b)
Prediction is the same as testing. (Bird et al. 2009) . . . . . . . . . .
46
Structure of a decision tree. (Safavian 1991) . . . . . . . . . . . . . .
48
2-3 All Swiss landslides used in modeling. Red dots indicate high damage,
yellow are medium damage, and green are low damage. . . . . . . . .
2-4
51
This figure displays the count of all slides that were included and excluded, separated by the amount of damage. . . . . . . . . . . . . . .
52
2-5
Modeled slides, separated by canton/GDP and damage level. . . . . .
53
2-6
Distribution of land cover for all Swiss slides used in modeling.
56
2-7
Features of the 30 Day Rain Distribution. Red is the high damage
landslides, blue is the low damage landslides.
2-8 Features of the 4 Day Rain Distribution.
landslides, blue is the low damage landslides.
11
. .
. . . . . . . . . . . . .
58
Red is the high damage
. . . . . . . . . . . . .
58
2-9
Features of the Population Density Distribution. Red is the high damage landslides, blue is the low damage landslides.
. . . . . . . . . . .
59
2-10 Features of the Length of Road in 2 km Distribution. Red is the high
damage landslides, blue is the low damage landslides.
. . . . . . . .
59
2-11 Correlation of all Anthropogenic Variables. The larger the circle, the
higher the absolute value of the correlation. Blue indicates positive
correlation, red indicates negative.
An X indicates an insignificant
correlation. Key is located to the right.
. . . . . . . . . . . . . . . .
62
2-12 Correlation plot of all Rain Variables. The larger the circle, the higher
the absolute value of the correlation. Blue indicates positive correlation, red indicates negative. An X indicates an insignificant correlation.
63
2-13 Correlation plot of all Pressure Variables. The larger the circle, the
higher the absolute value of the correlation. Blue indicates positive
correlation, red indicates negative. An X indicates an insignificant
correlation.
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
64
2-14 Correlation plot of all Temperature Variables. The larger the circle,
the higher the absolute value of the correlation. Blue indicates positive
correlation, red indicates negative.
correlation.
An X indicates an insignificant
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
65
2-15 Combined rank of variables, from results of sensitivity analysis (red),
and KS-test (blue). Rank determined by the test results, lowest number being the most significant variable.
. . . . . . . . . . . . . . . .
66
2-16 Model accuracy by number of variables, fit with a LOESS (Locally
weighted scatterplot smoothing) curve. . . . . . . . . . . . . . . . . .
67
2-17 ROC curve, Undersampled data . . . . . . . . . . . . . . . . . . . . .
70
2-18 ROC curve, Oversampled Data . . . . . . . . . . . . . . . . . . . . .
70
2-19 ROC curve, SMOTE . . . . . . . . . . . . . . . . . . . . . . . . . . .
71
2-20 ROC curve, CNN . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
72
2-21 ROC curve, ENN . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
73
2-22 ROC curve, Tomek Links . . . . . . . . . . . . . . . . . . . . . . . . .
74
12
2-23 ROC curve, NCR . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
74
2-24 ROC curve, OSS
. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
75
2-25 Results of balancing training data . . . . . . . . . . . . . . . . . . . .
76
2-26 Density plot of the voting results, with SMOTE data.The red line
shows high damage slides, the green line shows low damage instances.
77
2-27 Density plot of the voting results, with undersampled data. The red
line shows high damage slides, the green line shows low damage instances. 78
2-28 Variance of voting results for data that has been balanced with SMOTE 79
2-29 Variance of voting results for data that has been undersampled . . . .
80
2-30 Summary of voting techniques . . . . . . . . . . . . . . . . . . . . . .
80
2-31 Swiss landslides separated by season. . . . . . . . . . . . . . . . . . .
81
2-32 Summary of season-separated results . . . . . . . . . . . . . . . . . .
82
2-33 Summary of best results on JJA slides. Tuning methods include separating the seasons, reducing the variables, using the mean vote, and
balancing the training data. . . . . . . . . . . . . . . . . . . . . . . .
83
A-i Location of slides in Oregon, mapped with the highway system. Green
points do not contain records of damage, red points do. . . . . . . . .
94
A-2 Type of damage caused by landslides in the SLIDO records . . . . . .
95
A-3 Length of detours caused by Oregon landslides.
96
. . . . . . . . . . . .
A-4 Distribution of values of direct damage for Oregon slides, measured on
an intensity scale. . . . . . . . . . . . . . . . . . . . . ... . . . . . . . .
97
A-5 Distribution of total damage for Oregon slides, measured on an intensity scale.
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
98
A-6 Distribution of dollar amount of Oregon landslide damage, plotted on
a logarithmic scale.
. . . . . . . . . . . . . . . . . . . . . . . . . . .
99
A-7 Location of slides in Oregon, separated by amount of damage, as determined in Figure A-6.
. . . . . . . . . . . . . . . . . . . . . . . . .
A-8 Distribution of land cover for Oregon slides.
13
. . . . . . . . . . . . . .
100
101
A-9 Distribution of population density for Oregon slides. The red line is
high damage slides, the blue line is low damage slides.
. . . . . . . . 102
A-10 Distribution of distance to nearest highway for Oregon slides. The red
line is high damage slides, the blue line is low damage slides.
14
. . . .
102
List of Tables
2.1
Confusion Matrix, Undersampled Data . . . . . . .
2.2
Confusion Matrix, Oversampled Data . . . . . . . .
. . . .
70
2.3
Confusion Matrix, SMOTE
. . . . . . . . . . . . .
. . . .
71
2.4
Confusion Matrix, CNN . . . . . . . . . . . . . . .
. . . .
72
2.5
Confusion Matrix, ENN . . . . . . . . . . . . . . .
. . . .
73
2.6
Confusion Matrix, Tomek Links . . . . . . . . . . .
. . . .
74
2.7
Confusion Matrix, NCR . . . . . . . . . . . . . . .
. . . .
74
2.8
Confusion Matrix, OSS . . . . . . . . . . . . . . . .
. . . .
75
2.9
Votes produced when data is balanced with SMOTE.
. . . .
77
2.10 Votes produced when training data is undersampled.
. . . .
78
.
.
.
.
.
.
.
.
70
B.1 KS-test results for all continuous variables. Includes the test variable
105
B.2 KS-test results for all continuous variables. . . . . . . . . . . . . . .
111
B.3 Sensitivity Analysis with only one rain variable included. . . . . . .
117
B.4 Sensitivity Analysis with only one min temperature variable included.
118
B.5 Sensitivity Analysis with only one max temperature variable included.
119
.
.
. . . . . . . . . . . . . . . . . . . . .
.
and a p-value of significance.
B.6 Sensitivity Analysis with only one mean temperature variable included. 120
.
B.7 Sensitivity Analysis with only one pressure variable included. . . . .
15
121
0.1
Introduction
Shifts in weather extremes are one on the most dangerous expected impacts of climate
change, due to their tendency to cause natural disasters. When averaged across the
globe, extreme precipitation events have been found to be increasing (Alexander et
al. 2006). As precipitation is the most common trigger of landslides, an increase in
extreme precipitation is expected to result in increased landslide frequency (Dale et al.
2001) (Crozier 2010). Measurements of this frequency increase are at an experimental
phase, because of high degrees of uncertainty in landslide data, slope models, and
precipitation estimations from general circulation models (GCMs) (Crozier 2010). A
method is used here to bypass the modeled rain that comes from GCMs to lessen
one type of uncertainty. Large-scale atmospheric conditions associated with landslide
activity are determined from composites of atmospheric conditions over all days with
observed landslides. These atmospheric variables can be more confidently predicted
using climate models than modeled precipitation can be (Gao et al. 2014). The
method is presented here as a proof of concept and further work will create a numeric
estimate of the expected change in frequency that landslides will undergo in with
future climate change scenarios.
Many high damage landslides come as a surprise. The land movement occurs at
a high velocity, leaving little chance for the impacted area to be evacuated. Knowing
where landslides are going to occur and which areas are particularly vulnerable to
high damage slides would help reduce the risk that many people consistently live
under. The implications of this research are underscored by the recent landslide in
Washington that resulted in 41 casualties, one of the most fatal landslides ever to
occur in the United States (Berman 2014). Each year, landslides cause hundreds of
deaths globally, a number that could potentially be reduced with a better method
of predicting high damage slides (Petley 2008). Climate change, along with other
predicted global shifts such as population and land use that will influence landslide
frequency and severity, increase the importance of understanding landslide risk.
Quantifying landslide risk has to overcome challenges such as the lack of high
16
quality data, incomplete and uncertain models of landslide processes, and complex
formulas for risk measurement (van Westen et al. 2006). What robust risk quantification does occur largely takes place on a site-specific level, for example by governments
interested in evaluating their transportation networks or geological engineers looking
to evaluate the danger to specific buildings. This high cost and inefficient method of
measurement is unusable in places that do not have the resources to perform it, or
on larger scales where a map of all risk over an area is desired. The accepted formula
for landslide risk, initially proposed by Varnes (1984) is:
R=E*H*V
E is the elements at risk, H represents hazard, and V is a measurement of vulnerability.
H is expressed as the probability of landslide occurrence. V is the expected degree
of loss, on a scale of 0 to 1 (no damage to full destruction). E, the elements at
risk, are the population, transportation networks, buildings, economic activity and
other features of an environment that could be impacted, measured by the cost of the
features. The formula appears simple, but calculating these individual measurements
is complicated and causes the formula to become difficult to apply over large areas
(van Westen et al. 2006). Machine learning techniques may be able to bypass this
complex method of risk quantification. Several studies have successfully used machine
learning to measure the susceptibility of slopes to movement, but it has been little
used for complete landslide risk detection, or for measuring vulnerability (Yao et al.
2008) (Brenning 2005). If refined effectively, machine learning algorithms could be
used to determine risk for large regions in an efficient way. Historical data about
damage caused by many landslides, along with mapped data about anthropogenic
and weather features at the time of the slide can be used to identify patterns about
the intensity of landslide damage. This method could help a policy maker or planning
official better decide land use and zoning patterns and identify which areas are worth
preemptive action to avoid damage.
Historical databases are one of the most valuable resources for studying landslides
17
and estimating their future occurrence. Switzerland is used as a study area, because
of the availability of a comprehensive database that contains records of landslides
spanning 40 years, including a measurement of damage along with other necessary
information about the time and place of event occurrence (Hilker et al. 2009). This
data is used as a test site for two types of analysis: 1) an analogue approach to
detecting the occurrence of landslide days, determined by compiling the composite
atmospheric conditions of days on which landslides were observed and 2) a machine
learning approach to estimating the damage a landslide will cause, based on anthropogenic and weather conditions at the time of the slide. Following this is a discussion
of best practice in the real world applications of these models.
18
Chapter 1
An Analogue Method to Detecting
Landslide Response to Climate
Change: Proof of Concept
1.1
Background
The Intergovernmental Panel on Climate Change (IPCC) has reported that the frequency of extreme precipitation events has increased due to anthropogenic climate
change (Solomon et al. 2007). Because the primary trigger of landslide activity is
precipitation, in many areas landslides are expected become more frequent as a result.
Because of the mechanisms that cause water to accumulate in slopes and affect their
stability, an increase in total precipitation and extreme precipitation events will cause
higher rates of failure (Crozier 2010). Several studies have described the mechanisms
that will influence slope stability in response to climate change and though they have
come to the same theoretical conclusion about landslide response to climate change,
high uncertainty plagues attempts at quantifying an increase (Cruden and Varnes
1996) (Crozier 2010) (Collison et al. 2000). A common method of estimation involves applying downscaled GCMs to slope stability models, but doing this requires
a high spatial resolution that many climate models cannot reach. Other studies have
19
tried to statistically establish a relationship between landslide occurrence and an increase in local rainfall, though this method can be complicated by natural variability
in climate and environmental factors that is difficult to attribute to climate change or
account for in this sort of analysis. High magnitude events, which are likely to cause
more damage, may also increase with climate change because heavier rain events may
cause more land to be displaced (Matsuura et al. 2008).
Crozier observes that results from studies linking climate change and landslide
frequency are subject to very high margins of error, largely due to factors related to
climate models such as uncertainty in modeled weather predictions and the inability of
projections to reach high spatial resolution (2010). Previous studies have found that,
in general, GCMs do not reliably reproduce precipitation frequency (Dai 2006). Many
models have a tendency to underestimate heavy precipitation, while overestimating
less severe events. When these general circulation models are used to predict changes
in landslide activity any uncertainty in precipitation is carried through. Coupled with
other biases and uncertainties that landslide measurement is subject to, quantifying
the increase in landslides becomes subject to extremely high uncertainty that reduces
the robustness and usability of predictions. Gao et. al (2014) developed an analogue method to reduce the errors produced by climate models in estimating extreme
precipitation. Precipitation generally results from the interaction of large-scale atmospheric features, many of which can be simulated more realistically by GCMs than
precipitation currently can be. It was found that composites of these atmospheric
conditions more faithfully reproduced extreme precipitation than the measurements
of precipitation given directly from models (Gao et al. 2014). This technique was
applied here to the prediction of landslides in a proof of concept whose end goal is
to determine the effect that an increase in precipitation, and climate change more
generally, will have on landslide occurrence. The results show that landslide-inducing
atmospheric conditions can be identified and reproduce the occurrence of landslide
days with reasonable accuracy.
20
1.2
Methodology
Because landslides are frequently caused by extreme precipitation, when applying the
analogue approach to landslide prediction many of the same atmospheric conditions
will be present between landslides and precipitation. This study looks to improve
predictions for the number of landslide dates resulting from an atmosphere altered
by climate change over the current best available estimates. A proof of concept is
presented here, later to be applied to climate models to identify a quantification of
the general increase or decrease in landslide activity with climate change.
The approach builds off the work done by Gao et al., which used large-scale
atmospheric features to identify days of extreme precipitation (2014).
Instead of
targeting extreme precipitation to identify days of interest, in this study landslide
days are targeted. Dates of observed landslides were gathered from the Swiss Flood
and Landslide Damage database, a source which has 3366 records of landslides from
1972-present. Any days that had more than one slide were only considered once. The
atmospheric variables that were considered as predictors of landslides are 500-hpa
geopotential height, 500-hpa vertical pressure velocity, and total precipitable water.
The atmospheric conditions of each landslide day were determined, and a composite
was created which averages all of those days into one pattern. One way in which
landslide events differ from extreme precipitation is that longer-term atmospheric
conditions may be highly influential in producing the correct conditions for landslides.
Landslides are dependent on conditioning factors such as soil moisture which are
determined by a long timescale of precipitation patterns (Iverson 2000). The use of
composites which averaged conditions over extended time periods was explored. The
results of this will be shown later, but the one day composites proved strongest and
created the most distinct patterns so they were used. From the composites, cutoffs for
the identification of atmospheric conditions present on landslide days were identified,
in the form of spatial correlation from a day to the composites, and the presence of
"hotspots" -
localized areas of continuity between the composite and an individual
day.
21
1.3
1.3.1
Data
Observed Landslides
The Swiss Flood and Landslide Database was used to gather observed dates of landslide occurrence (Hilker et al. 2009). This database contains 3366 records of landslides
that have occurred from 1972 to the present. The records largely originate from news
sources. The dates were narrowed from a list of all slide dates based on criteria about
certainty and the availability of atmospheric data. Any dates that were indicated as
uncertain were removed and any date which had more than one slide was counted
once. Because of the variation in weather patterns among seasons, the data was also
separated by season for analysis purposes. The summer months (June, July, and August) have the highest landslide frequency but, as will be shown, the winter months
(December, January, and February) have the strongest composite patterns. For this
reason, the focus season is winter. Because of the availability of MERRA reanalysis
data, only the years from 1979 and 2012 were used, even though the dataset begins
in 1972. Figures 1-1 and 1-2 show the distribution of landslides in the Swiss Flood
and Landslide Databased during the period 1979-2012 by the dates and months on
which they occurred.
1.3.2
NASA-MERRA
The composites of atmospheric conditions were generated from NASA's Modern Era
Retrospective-analysis for Research and Applications (MERRA) (Rienecker 2001).
MERRA is based on the GEOS-5 atmospheric data assimilation system, which is
reanalyzed with NASA's Earth Observing System (EOS) satellite observations using
an Incremental Analysis Updates (IAU) procedure to gradually adjust the model to
observational data.
Its special focus is on conditions relating to the hydrological
cycle. The MAI3CPASM and MAI1NXINT products were used. These are MDSIC
modeling and assimilation history files. MAI3CPASM contains pressure variables on
42 levels in 3 hour increments. Geopotential height, sea level pressure, and vertical
22
Number of Landslides by Month
6001
-
400
-
300
200
-
--
-
--
_
-
-
100
-
0
\f
(~4
~
.~
4'
~
*~$~
\
\'~
el
Z
~'
Figure 1-1: Number of landslides in Switzerland per month, period 1979-2012.
Distribution of Slides by Date
50
45
L
40
35k
30
25
E
Z20
10
-
-
15
5
1975
2i015
Figure 1-2: Swiss landslides by date, 1979-2012.
23
pressure velocity were drawn from this file. MAI1NXINT has a single level resolution
and is measured in daily increments. Total precipitable water was sourced from this.
The data is all at a 1.250 resolution.
1.3.3
Data Processing
The Swiss Flood and Landslide Damage Database was used to identify on which dates
landslides occurred. MERRA data was drawn from those dates for composite generation. The variables drawn from MERRA were those that have been confirmed to be
associated with heavy precipitation, including 500-hpa geopotential height, 500-hpa
vertical pressure velocity, sea level pressure, and total precipitable water. To standardize the resolution with climate models, the resolution was linearly interpolated
to 2.5'x2'. All variables have been converted to a standardized anomaly, defined as
the anomaly from the seasonal climatological mean over the 34-year period under
consideration, divided by its standard deviation.
1.4
1.4.1
Application
Creating the Composites
Composites are an average of the atmospheric conditions (presented as standardized
anomalies) over all the days on which there were one or more landslides. The atmospheric conditions are determined for each day which has landslides and then all
of those days are averaged together to obtain the composite atmospheric conditions.
Several variables were used, which also have an association with precipitation events.
They include 500-hpa geopotential height (Z500), 500-hpa vertical pressure velocity (w500), sea level pressure (SLP), and total precipitable water (TPW). Sea level
pressure is not shown, as it was found to be redundant when also using geopotential
height.
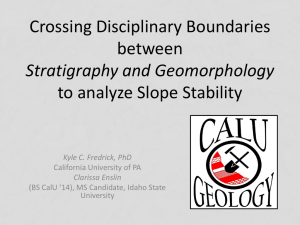
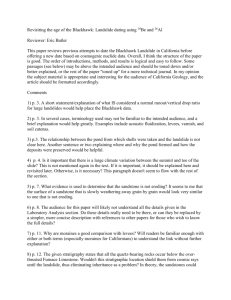
Figure 1-3 shows the composites for DJF slide days in Switzerland. The shading in
1-3.a) is the standardized anomaly of 500-hpa geopotential height (Z500) and features
24
75N
55N70N
1AW
-W2W
-1
-0.8
0
1QE
-0.6
2E
-0.4
3
-0.2
5Ei3 W
4-E
0
0.2
20W
0.4
1
10W
0.6
0.8
20E
1
30E
4E
50E
1.2
Figure 1-3: Composites of all Swiss DJF slide dates. The colors of a) show the
standardized anomaly of 500-hpa geopotential height (Z500) and the arrows show
vertical integral atmospheric vapor flux. The colors of b) show total precipitable
water (TPW) and the contour lines are 500-hpa vertical pressure velocity (w500).
a dipole pattern with a trough above Northern Europe and Scandinavia and a ridge
over Algeria in Northern Africa and the Western Mediterranean. This image also
shows vertical integral atmospheric vapor flux, in the arrows. The colors of 1-3.b)
show total precipitable water (TPW) in the shading. The peak anomaly for this
variable is over Switzerland and Southern France. The contour lines in this figure are
500-hpa vertical pressure velocity (w500).
The composites that were used for analysis were based on 1-day atmospheric
conditions over Switzerland, for all levels of damage and only for the DJF months.
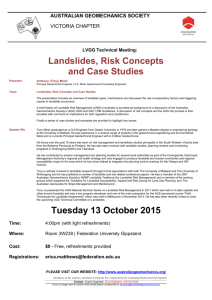
The composites for other time periods and seasons are shown in Figures 1-5 through 110, and they visually explain why the composite that was used was chosen. Figure 14 shows the composite 1-day conditions over landslides during the summer months
(June, July, and August), and when compared to the DJF composites, the pattern is
not as strong. The peak standardized anomaly is lower. The variables that are shown
in each figure are the same as in 1-3.a) and b).
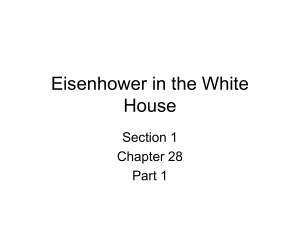
Figures 1-5 through 1-10 show composites over longer time periods. Multi-day
composites were considered because landslides can be caused by atmospheric condi25
63N
54N51N
-
67N
---
48N4-5N
l"w
D
1
IOE
-0.8
20E
-0.6
-0.4
30E
-0.2
4D-E
0
0
1lOW
0.2
0.4
1OE
0.6
0.8
20E
1
30E
40E
1.2
Figure 1-4: Composites of all Swiss JJA slide dates. The colors of a) show the
standardized anomaly of 500-hpa geopotential height (Z500) and the arrows show
vertical integral atmospheric vapor flux. The colors of b) show total precipitable
water (TPW) and the contour lines are 500-hpa vertical pressure velocity (w500).
tions and precipitation that occurred several days beforehand, or can be influenced
by average conditions over a longer time period instead of a sudden triggering event.
In these cases, the conditions over the several days preceding a landslide are averaged,
and then all those averages are combined to create one composite of the average of the
preceding days for all landslide target days. Figure 1-11 reinforces the visual determination that the one day composites are the strongest. It plots the peak maximum and
minimum values of the standardized anomaly for the composite Z500 value, as well
as the difference between the ridge (positive values) and trough (negative values), for
each of the multi-day composites. Figure 1-12 does the same for w500 and Figure 1-13
shows TPW. In all cases except for TPW, the strongest peak anomalies are seen in
the one day composite. For this reason, the one-day composite was used instead of
any of the multi-day composite options.
The Swiss Flood and Landslide Damage Database also contains information about
how much damage a slide produces. The final consideration in deciding the target
days was whether or not to separate the high damage and low damage slides. The
analysis that will be shown in Chapter 2, where the features of a landslide that are
26
70N
65N
6ON
55N
SON
45N
*
40 N
20W
b
16w
-1
-0.8
16E
-0.6
26E
-0.4
3 E
-0.2
W
E
0
0.2
1
0.4
1
0.6
2 E
0.8
1
30
4ME
1.2
Figure 1-5: Composites of all Swiss DJF slide dates with 2-day period. The colors of a)
show the standardized anomaly of 500-hpa geopotential height (Z500) and the arrows
show vertical integral atmospheric vapor flux. The colors of b) show total precipitable
water (TPW) and the contour lines are 500-hpa vertical pressure velocity
(w500).
70N
65N
6ON
55N
5N
2
W
16W
-1
b
-0.8
10E
-0.6
2
-0.4
E
-0.2
4E
0
20
0.2
1
1
O.4
0.6
0.8
*E
1
36E
44 E
1.2
Figure 1-6: Composites of all Swiss DJF slide dates with 5-day period. The colors of a)
show the standardized anomaly of 500-hpa geopotential height (Z500) and the arrows
show vertical integral atmospheric vapor flux. The colors of b) show total precipitable
water (TPW) and the contour lines are 500-hpa vertical pressure velocity (w500).
27
70N
65N
6ON
55N
SON
45N
40N
35N
3ON
a)
16W
-1
b
16
-0.8
-0.6
20E
-0.4
4E
30E
-0.2
0
b)
20W
0.2
loW
0.4
0.6
0.8
1
1.2
Figure 1-7: Composites of all Swiss DJF slide dates with 7-day period. The colors of a)
show the standardized anomaly of 500-hpa geopotential height (Z500) and the arrows
show vertical integral atmospheric vapor flux. The colors of b) show total precipitable
water (TPW) and the contour lines are 500-hpa vertical pressure velocity (w500).
55N
50N
46N
4ON
35N
x
jr
'W
jr
A' - X. jj .*,,
fta V
T:
3ON
.:Z4
A
A:& a
25N
21-W
V
V:-%
11
1W
-1
0
-U -
-Y
.1
A.-*
.6
-
a)
IE
-U.b
20E
-U.4
4 DE
30E
-0.2
0
20W
0.2
10W
0.4
IDE
0
0.6
0.8
1
1.2
Figure 1-8: Composites of all Swiss DJF slide dates with 10-day period. The colors
of a) show the standardized anomaly of 500-hpa geopotential height (Z500) and the
arrows show vertical integral atmospheric vapor flux. The colors of b) show total
precipitable water (TPW) and the contour lines are 500-hpa vertical pressure velocity
(w500).
28
70N65N
60N'
55N,
SON
40N
-4--+-*--Y.-I -
-
45N
-E
35N
30N
-
-)
0)
0W
low
6
-1
-0.8
1E
-0.6
24E
-0.4
b)
3XE
-0.2
4 IE
0
2
0.2
0.4
0.6
0.8
1
1.2
Figure 1-9: Composites of all Swiss DJF slide dates with 14-day period. The colors
of a) show the standardized anomaly of 500-hpa geopotential height (Z500) and the
arrows show vertical integral atmospheric vapor flux. The colors of b) show total
precipitable water (TPW) and the contour lines are 500-hpa vertical pressure velocity
(w500).
70N
65N
-A.mp
6ON
map
55N
5N,
-
45N
A.
dW0.
40N
.W
35N
.7---
30N-
0)
25N
21
W
16W
-
1
b
-U.8
16E
-U.6
26E
-U.4
36E
-0.2
4 DE
2
0.2
0
W
6
16W
0.4
0.6
16E
0.8
26E
1
-6E
40E
1.2
Figure 1-10: Composites of all Swiss DJF slide dates with 30-day period. The colors
of a) show the standardized anomaly of 500-hpa geopotential height (Z500) and the
arrows show vertical integral atmospheric vapor flux. The colors of b) show total
precipitable water (TPW) and the contour lines are 500-hpa vertical pressure velocity
(w500).
29
Z500
0.8
0.6
0.4
a0.
-$-Min
1
0
Z
2
3
4
5
10
7
-
14
--0.2
Max
r2-Difference
-0.4
-0.6
-0.8
--
_______________
Number of Days
Figure 1-11: Peak Standardized Anomaly of Composite Z500 for Various Time Spans.
The trough (negative anomaly, here labeled as min), and ridge (positive anomaly, here
labeled as max) are both variables of interest and so are included.
W500
0
1
2
3
4
s
7
10
14
30
-0.1
E
-0.2
-0.3
*
C.
-0.4
-0.5
-0.6
Number of Days
Figure 1-12: Peak Standardized Anomaly of Composite w500 for Various Time Spans.
30
TPW
0.45
0.4
0.35
101 0.3
S0.25
-.- Max
0.2
0
z
0.15
0.1
0.05
0
1
2
3
4
5
7
10
14
30
Number of Days
Figure 1-13: Peak Standardized Anomaly of Composite TPW for Various Time Spans.
likely to produce high damage were studied, had shown that precipitation was relevant
to the amount of damage a landslide would incur. Separating severe slides from less
damaging ones could help create an individual estimate of the future increase in
specifically high damage slides. Evidence of a difference in atmospheric conditions
between high and low damage slides could be used to infer a change in frequency of
particularly high damage slides as a result of climate change. The composites for these
two sets of target dates, Figures 1-14 and 1-15, show a difference in the peak anomalies
of atmospheric conditions, however, the high damage landslide dates did not show a
consolidated atmospheric pattern. The high damage composite for the Z500 variable
shows a disperse pattern which spans a large area, from Greenland to Scandinavia,
over much of the North Atlantic. For comparison, the low damage composite for the
same variable shows a pattern focused over Scandinavia and Northwestern Africa.
Identifying hotspots, a localized pattern of atmospheric consistency among the days
which will be discussed later on, is difficult for such a broad pattern. There were only
17 high damage landslides in this period, which is likely the cause of the disperse
atmospheric conditions.
31
3 ON
IMIj, 10 11111111 ji
251-40W
30W 20W
0
10W
10E
20E
30E
40E
50W 40W .3DW 20W
SDE
1OW
0
16E
20E
30E
40E
50E
b)
a)
-1
-0.6
-0.8
-0.4
-0.2
0.2
0
0.4
0.6
1.2
1
0.8
Figure 1-14: Composites of all Swiss DJF slides that incurred high damage. The
colors of a) are the standardized anomaly of 500-hpa geopotential height (Z500) and
the arrows show vertical integral atmospheric vapor flux. The colors of b) show total
precipitable water (TPW) and the contour lines are 500-hpa vertical pressure velocity
(w500).
7N
)0N
55N
SON4,5N
35N
25N V
15N
loW
20W
-1
0
-0.8
1
-0.6
20E
-0.4
3E
-0.2
20W
46E
0.2
0
0.4
loW
0.6
0
0.8
30E
2E
16E
1
40E
1.2
Figure 1-15: Composites of all Swiss DJF slides that incurred low damage. The
colors of a) are the standardized anomaly of 500-hpa geopotential height (Z500) and
the arrows show vertical integral atmospheric vapor flux. The colors of b) show total
precipitable water (TPW) and the contour lines are 500-hpa vertical pressure velocity
(w500).
32
1.4.2
Analogue Determination
Hotspots
Following the method of Gao et al., the composites shown in Figure 1-3 are used to
identify a pattern which can detect the occurrence of landslide events (2014). The first
part of detection is the identification of hotspots. Each grid from the atmospheric
conditions of each day has either a positive or negative value for the standardized
anomaly. The composite, as an average of the anomalies, has its own sign for each grid.
A map is produced which measures the number of individual days that make up the
composite that have the same sign as the composite at the same grid. From this map,
a "hotspot" is identified, defined as a cluster of grid cells which show strong evidence
of consistency among many members. The grid(s) with the maximum consistent sign
count serve as a lower threshold to the smallest "hotspot" that must be matched.
One criteria for identification as a landslide event is that the atmospheric variables
consistently match the signs of the hotspot grid cells. This is one feature that will be
used to identify the atmospheric conditions for a landslide day.
Spatial Correlation
The second part of detection is a cutoff in the spatial correlation between the composite and an individual day. Spatial anomaly correlation coefficients (SACCs) are
calculated between the composite members and the composite, and between the daily
MERRA values and the composites. Figures 1-16 through 1-21 show density plots
and histograms of spatial correlation, normalized as a percentage of days in the set.
In general, as spatial correlation increases, a day has a higher likelihood of being an
observed slide day. The statistical difference in spatial correlation between observed
landslide days (members of the composite) and the remaining days is analyzed to
determine a cutoff in SACC value that makes a day more likely to have a landslide.
The cutoff is measured as the spatial correlation value above which a day has a
statistically determined higher than random chance of being a landslide day. Of all
the days in the 34 year time span, 125 of them are landslide days and 2944 are not.
33
Z500
55
50
I
45
I
40
;;. 35
o
30
* Landslide Days
25
* Non-Landslide Days
15
-
4) 20
10
____R__L
9
05._
<0
0-0.1
0.1-0.2
0.2-0.3
0.3-0.4
0.4-0.5
0.5-0.6
0.6-0.7
0.7-0.8
0.8-0.9
0.9-1.0
Correlation
Figure 1-16: Spatial Correlation of Z500.
Z500
c'
-
Slide Days
-
All Days
-
Non-Extreme Days
62
46
0
0
0
0
N
0
_
0
0
-1.0
-0.5
0.0
0.5
Spatial Correlation
Figure 1-17: Density Plot of Z500 spatial correlation.
34
1.0
w500
60
55
45
40
035
0
00 30
i
Landslide Days
25 - -Non-Landslide
Days
20
10
-
15-
a
5
0
<0
0-0.1
0.1-0.2
0.2-0.3
0.3-0.4
0.4-0.5
0.5-0.6
0.6-0.7
0.7-0.8
0.8-0.9
0.9-1.0
Correlation
Figure 1-18: Spatial Correlation of w500.
o500
-Slide
-
-0.5
0.0
All Days
Non-Extreme Days
0.5
Spatial Correlation
Figure 1-19: Density Plot of w500 spatial correlation.
35
Days
TPW
60
55
50
45
40
M 35
too
"
25
Landslide Days
" Non-Landslide Days
is3
20
10
5
0
<0
0-0.1
0.1-0.2
0.2-0.3
0.3-0.4
0.4-0.5
0.5-0.6
0.6-0.7
0.7-0.8
0.8-0.9
0.9-1.0
Correlation
Figure 1-20: Spatial Correlation of TPW.
TPW
-
Slide Days
All Days
-
Non-Extreme Days
a
C4
0
-0.5
0.0
0.5
Spatial Correlation
Figure 1-21: Density Plot of TPW spatial correlation.
36
Drawing from this population at random, the probability of drawing a landslide day
is 0.0407. If the landslide and non-landslide days had the same distribution across
spatial correlation, the percentage of slide/non-slide days would stay consistent with
this 0.0407 value for each bin in the histogram of spatial correlation. However, because
slide days are more likely to have a high correlation measurement, the proportion of
slide days over total population in each bin increases.
The proportion of landslide days can be taken as a binomial distribution, where
p=0.0407 is the expected probability that a random day is going to be a landslide day.
An example of a binomial distribution is a coin toss, where there are two possible
outcomes; in this case, the two outcome options are whether a day has landslide
activity or not. There is some uncertainty in the stated probability, because of the
likelihood that landslides go unrecorded in datasets, for reasons such as they are in
remote areas or do not have any human or urban impact. Therefore, the formula for
standard deviation of a binomial distribution is:
np(l -1-p)
where n is the population count and p is the probability of success (it is a landslide
day).
,/np(l - p) = V/3069 * 0.0407(1 - 0.0407) = 10.9464
So the number of landslide days has a standard deviation of 10.9464. Using that in
the formula for probability over a binomial distribution,
NL + 3a
P
NL + NN
===
125 + (3 * 10.9464)
125+2944
0.0514
In this formula, NL is the number of landslide days and NN is the number of total
days in the subset. This value can be used as a statistically significant minimum
from which setting the cutoffs can begin. Above this cutoff probability, the likelihood
that a day will be a landslide is higher than if it was a random day in the dataset,
37
to a statistically significant degree. The increase in landslide likelihood is due to the
increase in spatial correlation. Days with a higher spatial correlation have a higher
chance of being a landslide day than could be attributed to randomness or chance.
The spatial correlation that this probability measurement corresponds to is 0.4 for
Z500 and TPW, and 0.3 for w500.
Criterion of Detection
Further following the method from Gao et al., the hotspots and spatial correlation
are combined to create a criterion of detection for the occurrence of landslides (2014).
It was determined that many of the observed landslide days share these common
features. In order to be identified as a landslide event, a day must meet the following
criteria:
1. Three or more variables (ridge (positive anomaly) of Z500, trough (negative
anomaly) of Z500, w500, and TPW) must have signs consistent with the hotspot
grid cells.
2. At least one of three variables (Z500, w500, TPW) meets the cutoff for spatial
correlation.
3. The spatial correlation of the same three variables all have to be positive. If
these three conditions are met, the day is tagged as a landslide day. The cutoffs
and hotspots previously identified serve as a minimum threshold, and can be
refined to stricter values if the criterion identifies too many days in calibration.
The criterion of detection begins with the values defined above, the statistically
significant minimum for spatial correlation and the smallest number of grids that can
define a hotspot. These cut-offs are further refined into stricter values until the same
number of observed landslide days is approximately matched with the number of days
that fit this criterion in 34 years of MERRA observations.
38
1.4.3
Success Rate
The criterion of detection was evaluated on 34 years of MERRA data, including all
the DJF days between 1979 and 2012. All days are compared against the composite
constructed from all observed DJF landslide days to determine hotspot sign consistency and spatial correlation. If a day meets the criterion, it is considered a landslide
day. Performance is measured by the success rate in identifying an observed landslide
date, and the number of false positives that the criterion detects. The success rate
is the fraction of days that the criterion detected that match the observed landslide
days over the number of total observed days. False positive is the fraction of falsely
identified days over total identified days. The success rate reaches 20-25% when exact
matches are considered. It improves to 25-29% if the window for event matching is
increased so that a date generated by the analogue method is within 1 day previous
to an observed day. Increase this window to 2 days and the success reaches 29-30%,
3 days and it reaches 35-36%, up to 7 days and it reaches 45-50%. The false positive
rate for an exact match is 79-81%, for 1 day it drops to 70-73%, 2 days at 67-71%, 3
days to 63-70%, up to 7 days where the false positive rate is 52-56%. The criteria was
allowed to be relaxed because oftentimes the triggering weather event for a landslide
occurs several days previous. Relaxing the criteria is another way to accommodate
longer timescale conditioning factors which influence landslide occurrence, besides
using multi-day composites.
There is a naturally high uncertainty rate in predicting landslides, particularly
when estimating their occurrence from solely one aspect of their mechanisms, as is
done here with the weather pattern. The high false positive rate may be partially
due to the incompleteness of data, when there may be landslides but they were not
observed or recorded. Some of the dates identified during the calibration may have
had a landslide, but it would have been in a remote area or did not cause damage.
39
1.5
Discussion and Future Work
What has been presented exists as a proof of concept for an analogue detection of
landslides. Calibration has produced robust rates of success, high enough to trust that
this method is valid. The criteria of detection can replicate the number of observed
landslide days within a time period with MERRA data, and can reach a better than
50% success rate at getting the day right to within a small window. The next step
is to use these results with climate models in order to quantify a change in landslide
activity. The results will be applied to CMIP5 climate models, which simulate all the
atmospheric conditions of interest. The frequency with which the criteria of detection
occur in CMIP5 will serve as an estimate of the frequency of landslide activity in the
future, and can be measured under various climate change scenarios.
This study has been able to show that the atmospheric conditions present at the
time of a landslide are a good means of detection for occurrence and can be used
in the future to estimate the change in landslide activity according to predicted climate change patterns. This method presents a novel means of correlating landslides
with climate change and expected alterations in precipitation occurrence, offering
improvements over alternatives by removing the reliance on modeled precipitation.
Most methods of correlating landslides with climate change extract a direct measurement of precipitation change from climate models. Since landslides generally
occur under the most severe precipitation events, and since climate models have been
proven to unreliably estimate extreme precipitation, this method improves upon climate change-landslide impact measurements driven by modeled rain estimates.
One potential source of bias is the non-reporting of slides, a common shortcoming
in many landslide datasets. It may be suspected that the conditions are right for a
landslide, yet the slide could have taken place in an area which was too remote to
record a slide or the data could be complete and no slide occurred. This analysis also
occurs on a large scale -
the weather patterns are widespread and the study area
is all of Switzerland, which necessarily ignores more smaller scale conditions which
influence landslide occurrence, such as slope stability or local weather patterns. The
40
results should be viewed as an estimation of slide frequency rather than any prediction
as to exactly when a slide will occur. In future work, this method could also be coupled
with other changes that are expected to occur with climate change, such as a change
in vegetation, temperature, and soil moisture to more fully estimate the impact that
climate change will have on landslide activity.
Despite these shortcomings, the analogue method has the opportunity for improving on large-scale predictions of landslide frequency. It offers a robust way to analyze
landslide response to climate change, over calculating a percentage increase in slide
activity as a direct function of a percent increase in rain, and it can be applied to any
area with reliable weather data and a list of dates on which slides have occurred. The
ultimate measurement that can be determined from this method, a quantification of
change in landslide frequency, can help direct priorities for landslide maintenance. An
increase in landslide activity would indicate that mitigation should be done, perhaps
a monitoring system should be put in place, and further emphasis should be placed
on directing construction away from unstable slopes. If a nation of other jurisdiction
spends X amount of money on landslide damage and resultant repairs yearly, this
could provide a measurement of how much they can expect to spend in the future,
and can budget accordingly. With better data, this method could provide an estimate for the amount of damage landslide will create by correlating increases with the
amount of money spent, or correlating atmospheric conditions with damage produced
by a slide.
41
42
Chapter 2
Modeling the Damage Incurred by
Landslides
2.1
2.1.1
Background
Vulnerability Analysis
The equation for landslide risk, as explained in the introduction is R = E * H * V
(Varnes 1984). This part of the study aims to quantitatively evaluate one part of this
equation: vulnerability. Switzerland is used as a case study, as it was in Chapter 1
of this thesis.
Measuring vulnerability provides a basis for decision-making in response to a potential landslide threat.
In fields such as disaster response, urban planning, and
transportation planning, knowing the vulnerability of an area is important because
when combined with a hazard measurement (which shows where and when landslides
are likely to occur), vulnerability produces a picture of total risk (Alexander 2005).
Hazard maps and analyses are common, and the field of measuring hazard is
well-studied (van Westen et al. 2006). It largely relies on understanding the causal
factors -
geophysical and weather-related -
that go into landslide occurrence and
recognizing them over a wide area. Spatial analysis tools such as GIS are used to
derive relevant data features of landslide prone areas (Carrara et al. 1999). Once
43
the causal factors are known, and those features have been identified over the area of
interest, a hazard map can be made.
Vulnerability can be evaluated in largely the same way. With an understanding
of causal factors and an identification of where the influential features are present,
vulnerable areas can be recognized. Literature reviews have noticed a decided lack
of vulnerability studies within research on landslide risk assessment (Glade 2003).
They assert that a lack of information about vulnerability inhibits determination of
risk (Galli and Guzzetti 2007). Techniques for vulnerability studies for landslides are
largely drawn from those developed from other hazards such as earthquakes or floods.
Two general types of approaches can be taken towards evaluating landslide hazard.
One is a qualitative approach, which creates a list of exposed elements (all buildings
or other urban features over an area) and assigns them an empirically evaluated
index for vulnerability, generally on a 0-1 scale (none to total destruction likely)
(Maquaire et al. 2004). This method is difficult to apply efficiently over large areas
because each element is evaluated individually, but it is potentially useful for local or
urban governments (van Westen et al. 2006). A quantitative approach to evaluating
vulnerability uses models and damage functions to decide the impact of a landslide
(Maquaire et al. 2004). This method depends on the ability to acquire detailed data
about past occurrences.
The approach taken here is quantitative. We aim to identify the causes of landslide
vulnerability from an analysis of historical landslide occurrence, which includes consideration of both spatial and temporal factors, anthropogenic features and weather
conditions respectively. It will do this by applying data mining and machine learning
procedures to the data, techniques which have previously been utilized in studies on
hazard analysis (Yao et al. 2004) (Brenning 2005). A benefit to this approach is
that it combines detailed mapping on a small scale with a wide area of study. By
using part of the data for training and part for testing, the model success can be
validated, a process which is frequently missing from hazard analysis (Chung and
Fabbri 2003). Machine learning is efficient, requiring relatively small amounts of time
for computation once models have been properly refined and given all the necessary
44
data (Kostiantis 2007). It can also easily accommodate changing future conditions,
such as shifts in population density or expected climate change.
2.1.2
Machine Learning Approach
Data mining is a field within computer science that is used for "the extraction of
implicit, previously unknown, and potentially useful information from data" (Witten
and Frank 2005). Machine learning uses algorithms to infer the underlying structure
of data and extracts information from data into a usable format. In the application
here, it will be used to learn about landslide vulnerability, taking data about each
historic occurrence and drawing conclusions and predictions about resultant damage.
Machine learning has been successfully applied to a variety of real world problems,
from cancer detection to text identification to business decision making. It can be
broadly separated into two categories: supervised and unsupervised learning (Hastie
et al. 2009). Supervised learning works on data where the output labeling is already
known. It uses a group of inputs, which may have some level of influence over the
output, as predictive variables (Hastie et al. 2009). Unsupervised learning uses data
that comes with no output labeling, and its primary purpose is in clustering the data
into groups with some level of homogeneity. Because the data from the study area
here has an output in the form of level of damage, supervised learning is used. A
problem can be one for either classification or regression (Hastie et al. 2009). In
regression, the output is continuous. In classification, the output is a class labeling.
The problem here is one for supervised classification, because the data has a labeling
which consists of two classes, high or low damage.
Landslide damage will be classified using a machine learning algorithm based on
available information about conditions at the time of each slide. The dataset is made
up of N vector samples, which combine to form a matrix X, and where xi represents
the ith sample in the set. Each sample xi is an individual feature vector, containing all
the information, or features, of each sample (Hastie et al. 2009). Each feature vector
is associated with a class label, Y within [0, 1] in the case of a binary classification.
In this case the options are low or high damage, which can be represented as binary.
45
Figure 2-1: Depiction of the steps to create a supervised classification model.
Prediction is the same as testing. (Bird et al. 2009)
b)
The combination (xi, yi) of feature vector and labeling is one sample or instance.
The classification algorithm aims to find a function f(X) that accurately reproduces
Y.
There are two general steps in machine learning:
training and testing.
The
algorithm determines f(X) on a subset of all the data, in a process called training.
The function produced by the algorithm is meant to perform well on the training
data, though rarely does it reach perfect accuracy.
Perfect accuracy on the train-
ing data is also undesirable because the resulting classifier has likely overfit the
data(Hastie et al.
2009).
For the function to be usable, it must perform well on
a separate set of testing data. Test data is a set of feature vectors which the classifier
has not seen before, but which are presumably drawn from the same distribution as
the training set. In practice, a certain percentage of the entire source data is removed
and reserved for testing before any modeling has taken place.
Testing error is one measurement of model success. It is a measure of how well the
model generalizes. A successful model will minimize test error (Hastie et al. 2009).
In summary, the steps taken in creating a classification model are shown in Figure 2-1. If the test success is unsatisfactory, the model parameters can be tuned along
each step of the building process.
46
Preliminary tests to determine which classification algorithm to use were done in
Weka (Waikato Environment for Knowledge Analysis), a software which is able to
apply many standard machine learning techniques to data (Witten and Frank 2005).
Preliminary results indicated promising success with the random forest algorithm.
Before tuning, accuracy on all the data was recorded at close to 90%, though with
much higher error in classifying high damage slides. This will be discussed in more
detail later on.
2.1.3
Random Forest Algorithm
Random forest, first developed by Breiman, is an algorithm which consists of an ensemble of decision trees with vote amongst themselves to decide upon a classification
(2001). It uses bagging (bootstrap aggregating) to average individual models. Bagging is a technique where each model in the ensemble votes with equal weight, in this
case each decision tree in the ensemble forest. Random forests have a reputation for
strong performance, even before tuning (Hastie et al. 2009).
The general structure of a decision tree classifier is shown in Figure 2-2. It is the
basis of random forest algorithms and on its own is another supervised classification
algorithm. A decision tree sorts data on m levels. Each level has internal nodes, each
node representing a feature of the data, each branch from the node corresponding to
a value of that feature (Mitchell 1997).
Random forests consist of n trees with m levels each. n is generally a very large
number, limited by the fact that very high numbers may introduce longer computation
time. The default value for m is the square root of the number of variables in the
feature vectors. Each tree is grown in a subspace of m randomly chosen variables,
which means it is trained on only those random variables. This introduces variability
into the trees (Breiman 2001).
47
..-.. ...... . -....... -..
root
.....-.---------------------------
depth 0
node t
---
~~C)
---Mee
c66 ,D( ---------.---
depth I
-----
-------
A
.
j
k
depth (M-1)
iterminals
(class labels)
CQ) - subset of classes accessible from node i
F(I) - feature subset used at node t
D(I) - decision rule used at node t
Figure 2-2: Structure of a decision tree. (Safavian 1991)
2.2
Methodology
Machine learning techniques will be used to build a robust model of landslide damage,
based on the hypothesis that information about past events can help us predict the
damage of future events. A historical database of landslide occurrence and damage,
geospatial data, and weather data are used to prepare the feature vectors. Feature
vectors are created which contain elements reflecting both spatial risk, in an anthropogenic sense, and temporal risk, in the weather patterns surrounding each slide date
taken from the historical inventory. Each slide has been classified into high or low
damage landslides, and the output of the algorithm is a classification of landslides,
based on the information in the feature, into low damage or high damage. Two classes
were decided on because of the organization of the data, as discussed in a later section. The algorithm trains on a subset of 80% of the data, and tests on the remaining
20% in order to assess the success that it achieves. The training and test data sets
are randomly drawn without replacement from the full set.
48
To validate a model's
success, the data is resampled five times. The algorithm is trained on each subsample
ten times. Any measure of accuracy is an average of fifty times that the algorithm is
applied. Based on the results, the algorithm is refined and tuned. Some features of the
data required refinement of the process for better success, such as the feature vectors
having a large number of features which may not be significant, severely unbalanced
classes, and unbalanced success between the classes. Total success is presented based
on the best refinements of the model.
2.3
Data
Inferences will be drawn about the future of landslide activity based on an examination of past occurrences. Each instance if therefore drawn from a historic dataset
that contains thousands of individual slide records. To create feature vectors which
will inform the algorithm, each instance is taken from the historic record and the
conditions at the time and place of the slide are taken from other datasets. Each
dataset used to create the feature variables is described in detail below. The data has
a variety of collection techniques, from historical record-gathering, to GPS road maps,
to remotely sensed observations. Various software such as Quantum GIS, ArcGIS,
and Matlab were used to calculate variables for the feature vectors.
Each feature either represents an element that has historically incurred damage
from landslides or a potential cause of the landslide's severity. The elements of damage
are population density, transportation networks, land cover, GDP, and buildings. The
variables reflecting landslide severity mechanisms include gradient, rain, atmospheric
pressure, and temperature. There may be some interaction between these two types
of features, for instance building a road may destabilize a hill, but the road will also be
broken, or agricultural activity, which may both be a cause and an impacted feature
of a landslide. Other features such as the power system and the water supply, which
have been impacted, or the amount of deforestation, which can be a cause of activity,
are relevant but have not been included here because of data availability.
The results presented here are from a case study in Switzerland. Previous work
49
was done with a dataset in Oregon, but due to issues of data quality, results were not
included here but are discussed in Appendix A.
2.3.1
The Swiss Flood and Landslide Database
The same dataset which was used for identifying landslide days for the analogue
method in analyzing the atmospheric patterns surrounding landslides was also used
for modeling the amount of damage. Substantial historic datasets of landslides are
difficult to come by and are subject to many issues and biases, such as incompleteness,
short time periods, and uncertainty surrounding measurements like dates. The Swiss
Flood and Landslide Damage Database contains records of landslides and floods that
have happened in Switzerland from 1972-2012 (Hilker et al. 2009). The original source
of the data is in news reports, and all of them have incurred some type of damage. The
records are contained in a large spreadsheet and each landslide in the dataset has been
documented in a standardized way, which includes information about the amount of
damage caused in a category based on the cost in Swiss Francs, the date, the exact
location, any fatalities, the triggering event, and any other further information that
was available. A level of uncertainty is included in each measurement, and those with
uncertain dates or location were disregarded in this analysis because exact dates and
locations are needed for information about weather patterns and local conditions.
Figure 2-3 shows the location of all of the slides that were modeled. It separates the
slides by level of damage.
All the landslides from 1979 on that had a date indicated to be certain were
included in this analysis because of data availabity. Each landslide contains a record of
how much damage was incurred, measured in Swiss Francs. The damage was binned
into three categories: High (over 2 million francs), medium (0.4-2 million francs),
and low (0.01-0.4 million francs). The damage is only a record of direct damage
(e.g. damage to a building or a road), not indirect damage or death/injury. Before
removing any of the data, there were 3085 low damage slides, 210 medium damage,
and 71 high damage. Because of the small number of high damage landslides, high
and medium damage slides were combined into one class for evaluation purposes. The
50
Figure 2-3: All Swiss landslides used in modeling. Red dots indicate high damage,
yellow are medium damage, and green are low damage.
final dataset in use contained 218 high damage cases and 2255 low damage instances.
Figure 2-4 shows the distribution of slides, separated by damage level and by those
which have been excluded and included.
2.3.2
NASA SEDAC
Information about population density came from NASA's Socioeconomic Data and
Applications Center (CIESIN et al. 2005).
Gridded maps of population density
are available in 5 year periods from the years 1990-2015 from a dataset called the
Gridded Population of the World. The data is on a 2.5 arc-minute scale and is
sourced from satellite data. Years 2005-2015 are projected future estimates because
the data was gathered before 2005. For each slide, the location was used to identify
the population density at that point, as a weighted average over the grid it lies within
and its surrounding 8 grids. Each landslide is dated, so the population density used
for each slide was also a weighted average from the closest years where data was
available.
51
Number of Slides
3000
-
3500
2500
2000
Slides
1500
Excluded
U Slides Included in Modeling
1000
500
0
High
Medium
Low
Figure 2-4: This figure displays the count of all slides that were included and excluded,
separated by the amount of damage.
2.3.3
GDP
Switzerland's Federal Statistical Office makes available statistics on its GDP by canton (FSO 2013). Cantons are the states of Switzerland; there are 26 of them. The
data from 2008 was used, the earliest year for which this information was available
digitally. This information could provide a reason why some landslides cost more
than others, or indicate which cantons are best positioned economically to recover
from disasters. Some economists have argued that disaster risk increases with GDP
per capita levels (Kellenberg and Mobarak 2007). More developed areas, as shown
with higher GDP, may have higher value infrastructure and damaged elements, which
could be a reason why a particular slide incurs more damage. Others have argued the
contrary, that more developed areas are better equipped to mitigate risk, and thus
would incur more damage. The exact nature of the relationship between GDP and
amount of damage is still contested, but using a machine learning method means that
the relationship between each variable and the outcome does not have to be known
in advance. Figure 2-5 shows the number of high and low damage slides, separated
by canton. The GDP for each canton is also given in Swiss Francs.
52
Slides by Canton and Damage
----
-
-
Basel-Stadt (147,769)
Zug (125,302)
Geneva (106,484)
Zurich (94,515)
Schaffhausen (73,550)
Basel-Landschaft (69,792)
Neuchatel (69,298)
Aargau (66,812)
Bern (66,086)
Ticino (65,909)
Vaud (65,671)
St. Gallen (64,077)
A
Solothurn (60,580)
Lucerne (59,222)
Glarus (58,236)
Jura (58,041)
Graubunden (56,843)
Obwalden (56,150)
U
Thurgau (55,192)
Nidwalden (54,443)
Schwyz (53,927)
Valais (53,354)
Fribourg (51,016)
Appenzell Innerrhoden (48,553)
Appenzell Ausserrhoden (47,890)
Uri (47,195)
---
-ma
&Im-s
E High Damage
N Low Damage
-
U-mm
_________
0
50
100
4-
200
150
250
300
350
400
Number of Slides
Figure 2-5: Modeled slides, separated by canton/GDP and damage level.
2.3.4
Weather Data
The European Climate Assessment and Dataset project maintains daily observational
data from meteorological data around Europe. E-OBS is a daily gridded observational
dataset that includes mean temperature, minimum temperature, maximum temperature, sea level pressure, and precipitation (Haylock et al. 2008) (van den Besselaar et
al. 2011). The data comes from a number of meteorological observation sites across
Europe. The grid is a 0.25 degree box. Each of these variables is included in the
feature vector for each slide over a number of date ranges, from the day of to the
previous 365 days.
2.3.5
Transportation Data
A number of datasets were used from ESRI, as provided in ArcGIS base layer data.
The original sources were a number of companies that provide mapped transportation
data, largely for GIS or GPS uses. The measurements were done with Quantum GIS
53
and ArcGIS. The transportation variables in the feature vectors are:
1. Number of Roads in 0.12 km
2. Number of Roads in 2 km
3. Number of Highways in 0.12 km
4. Number of Highways in 2 km
5. Number of Railroads in 0.12 km
6. Number of Railroads in 2 km
7. Length of Road in 0.12 km
8. Length of Road in 2 km
9. Length of Highway in 0.12 km
10. Length of Highway in 2 km
11. Length of Railroad in 0.12 km
12. Length of Railroad in 2 km
13. Distance to Nearest Road
14. Distance to Nearest Highway
15. Distance to Nearest Railroad
These distances were chosen because they were the mean and max landslide runout
distances identified from another landslide database in Oregon. Modeling was started
on this dataset, but data quality issues meant the results were not as robust as they
could have been.
However, for consistency in modeling and since the data from
Switzerland provided no data on runout distance, the radius measurements on 0.12
and 2 km were maintained. Railroads, roads, and highways all incurred damage in
several historic instances, and these measures provide an indication of the amount of
human activity occurring in the region.
54
2.3.6
Buildings
Information about buildings came from OpenStreetMap data, and open source mapping dataset. The data comes from a number of original sources, including surveys,
public access government data, and aerial photography. It is available for public
download and is where building data was obtained for all of Switzerland. The number of buildings in 0.12 km and 2 km were calculated, the same radius used for transit
data. this variable provides a more nuanced look at potential damage to structures
over a simple land-use categorization.
2.3.7
Land Cover
The Corine Land Cover database covers all of Europe in a 100 square meter land cover
grid (Bossard et al. 2000). It is maintained by the European Environmental Agency
and available for the years 2000 and 2006 for Switzerland. Each grid is identified as
one of 51 possible types of land cover. For the feature vectors, each landslide was
matched to a grid in the closest year's data. Figure 2-6 shows the number of landslides
per land cover category.
2.4
Application
Creating the feature vectors was the first step in modeling, and once each slide had
the same information stored in its vectors, a random forest algorithm can be applied
to the data. The specifics of the data provided several challenges to address when
applying the algorithm, such as unbalanced class populations, variables which may be
irrelevant, and unbalanced success for the two classes. Each of theses issues has many
possible solutions, so this section will discuss algorithm application and refinement,
examining each issue and the methods used to confront them, and the varying levels
of success each achieved.
55
Distribution of Landcover for Swiss Landslides
Water Bodies
W
Water Courses
Sparsely Vegetated Areas
Bare Rocks
Transitional Woodland-Shrutb
Moors and Heathland
Natural Grasslands
Mixed Forest
Coniferous Forest
Broad-Leaved Forest
Agro-Forestry Areas
Principally agriculture, with significant vegetation
Complex Cultivation Patterns
Pastures
Fruit Trees and Berry Plantations
Vineyards
Non-Irrigated Arrable Land
Construction Sites
Road and Rail Networks and Associated Land
Industrial or Commercial Units
Discontinuous Urban Fabric
Continuous Urban Fabric
0
7 7
0
100
200
300
400
500
600
Figure 2-6: Distribution of land cover for all Swiss slides used in modeling.
2.4.1
Determining Important Variables
There are a total of 165 possibly influential variables, but each tree in a random forest
is generated using only a randomly chosen subset of all the features. Because all of
the variables have not yet been guaranteed to influence the class outcome, there is
a chance that the variables that have been randomly chosen will not actually assist
a classifier in creating the correct outputs, and that they will be just noise. If the
algorithm uses many irrelevant variables, its performance may be poor. A number
of statistical test were run with the aim of identifying which features differ between
classes, and therefore could be determined to be influential to the classification.
A
ranking of the variables by combined significance from the tests is located after a
description of the texts, in a summary.
56
KS-test
A Kolmogorov-Smirnov test is a statistical test which compares the probability distributions of two-samples. It makes no assumptions about the underlying distribution
of the data. The null hypothesis is that the two samples are drawn from the same
distribution, and refuting the null hypothesis concludes that the samples are drawn
from two different distributions. The test computes a distance between the empirical
cumulative distribution functions (ecdf) of each sample and quantifies the results as
the ks-statistic. The p-value is a measure of significance that allows acceptance or
rejection of the null hypothesis. The traditionally accepted cutoff for significance is
at least 0.05, if not the stronger value of 0.01, where there is a strong chance that
the null hypothesis can be rejected. In this application, the distribution of the low
damage slides was compared with the distribution of the high damage slides for each
of the non-categorical variables. The results of the ks-test are shown in a table in
Appendix B.
Figures 2-7 through 2-10 show the distributions of selected variables which the
ks-test result deemed to be significantly different between the high and low damage
slides.
Sensitivity Analysis
In addition to the ks-test, sensitivity analysis was used to determine how the models
responds to the removal of each variable. This method consists of removing features
from the training set one at a time and recording the success (Guyon and Elisseeff
2003). If removing one variable causes a significant decrease in success for a model,
it can be deemed significant. The model needs it to successfully classify the data.
If a variable is removed and the model success increases, the variable may be noise
or may be confusing to the model, and not helpful for classification. No change also
implies that the variable is not helpful. For this, the algorithm is run ten times for
validation, while removing each variable one at a time. The success on the training
data set is recorded. Over each data removal, the training dataset and the test set
57
a
8
a
-Ia1
C%
8
8
C-?
B,
I
0
I
I
I
2000
~~~1~~~
U
4000
6000
low
high
30 Day Rain
Figure 2-7: Features of the 30 Day Rain Distribution. Red is the high damage
landslides, blue is the low damage landslides.
a
a
S3
a
j
8b
C=
I
0
I
500
I
-
LS?c%
t
1500
low
2500
high
4 Day Rain
Figure 2-8: Features of the 4 Day Rain Distribution. Red is the high damage landslides, blue is the low damage landslides.
58
8
83
ii>
K
I
0
-
8
4
1
4000
I
1
t
6000
low
high
Population
Figure 2-9: Features of the Population Density Distribution. Red is the high damage
landslides, blue is the low damage landslides.
8
8
8
8
0
50000
low
150000
high
Lesngth of Road in 2 krn
Figure 2-10: Features of the Length of Road in 2 km Distribution. Red is the high
damage landslides, blue is the low damage landslides.
59
remain the same, and the majority class has been undersampled to balance the data.
Appendix B includes the results of the sensitivity analysis. It lists the mean success
rate for the runs with each variable removed, and the results of a t-test that compares
the distribution of success between the model with all variables and the model with
each variable removed. The p-value of that test is included here, telling whether there
each variable makes a significant difference in success.Commonly accepted significance
levels are 0.05 or 0.01. Again, as with the ks-test, we are most interested in ranking
the variables for significance. The table is sorted according to increasing success rate.
For reference, the first row is the success with no variables removed.
Because of high correlation amongst variables, in several cases the data is also
removed in related segments, for example all the rain variables are removed at once,
or all the temperature variables. When these sets of variables are removed, each
variable is added back in one at a time to test which gives the largest improvement
on success. This is also shown in Appendix B. Sensitivity analysis performed by
removing all the rain variables and then just including one rain variable at a time is
shown in Table B.3. Minimum temperature is in Table B.4, maximum temperature
in Table B.5, mean temperature in Table B.6, and pressure in Table B.7.
The results from this analysis show that many of the variables are highly influential
to the model's success.
Weather variables in particular, when all were removed,
dropped the model success the most. Weather is a somewhat surprising variable to
influence the amount of damage, but there could be several explanations for this.
It could be correlated to season; seasons will be separated later on for individual
modeling. It could be that high amounts of rain also cause flooding, which increases
the damage. Rain could also be an analogue to the amount of land that is displaced.
High temperatures could also cause snow to melt, increasing the water present in
the ground. The most influential anthropogenic variable was the number of roads in
2 km. Roads are one of the most common element damaged by landslides and, as
Switzerland has many areas with mountainous terrain, many of the roads are built
into slopes. More roads in an area increases the likelihood that one or many of them
may be hit and damaged.
60
Pearson Correlation
Many of the variables have high correlation amongst each other, particularly many
of the weather variables. Two highly correlated variables may both seem important
to classifying data, but they may be redundant if the correlation is high. Correlation
measurements were explored using a Pearson correlation, which is a measurement of
the linear dependence of two variables. The Pearson statistic is calculated by:
Px,
=
covariance(X, Y)
where a- is the standard deviation of the distribution, X and Y are the two distributions being compared, and p is the symbol commonly used to represent correlation.
Figure 2-11 displays the correlation for all the anthropogenic variables. Figures 2-12,
2-14, and 2-13 correlate the atmospheric conditions. The axis labels refer to the variable, the numbers represent the days included in the measurement of the variable.
Any correlation with an X through it signifies that an accepted significance level of
.95 was not reached. The larger the circle, the higher the absolute value from the
correlation. The highest value that can be reached is one, which occurs when one
variable is the exact match to the one it is being compared to. Blue indicates positive correlation, red indicates negative correlation, an inverse relationship where one
variable increase while the other decreases.
Variable Significance Summary
In summary, the Pearson correlation, sensitivity analysis, and KS-test were used to
narrow the number of variables used in modeling. Each variable was ranked with how
it had done on each test, based on the p-value of significance. The lower the ranking,
the less significant. Figure 2-15 shows a plot of the combined measurement of the
KS-test and sensitivity analysis rank. The lower the number, the more significant the
variable is likely to be. Also considered was the correlation - if two variables were
marked as significant in both tests, but they had high correlation, one was likely to
61
o
(N
cc0 M
f-
00f
9
06*
9*4
10
2 40
;
;eee
0.6
12000*@@
0.4
@
16000#
1900
0.2
0
17
-0.2
11
5
-0.4
-0.6
@
-0.8
.
@
,
15 9
3
Figure 2-11: Correlation of all Anthropogenic Variables. The larger the circle, the higher the absolute
value of the correlation. Blue indicates positive correlation, red indicates negative. An X indicates
an insignificant correlation. Key is located to the
right.
62
Number
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
Variable
Length Hwy in 0.12 km
Length Hwy in 2 km
Length Rd in 0.12 km
Length Rd in 2 km
Length RR in 0.12 km
Length RR in 2 km
No. Hwys in 0.12 km
No. Hwys in 2 km
No. Rds in 0.12 km
No. Rds in 2 km
No. RRs in 0.12 km
No. RRs in 2 km
Distance to Hwy
Distance to Rd
Distance to RR
No. Building in 2 km
No. Building in 0.12 km
GDP
Population Density
ao-
10
150
.
..
.
.
.
.
e
45
90
75
105
120
30
14
0.8
r~b~
g
0.6
040*4t*V60
00,
A&0
00
I
*1*,*',*-*
*
0
0
0**
*6'6
04
.0.2
.
'
0.2
-0.4
-08
180
e
3 e
1-7
-0.2
e
ee
e
0
2
29-58tecre
8-14
es
e ict
a
Figre2-1:orelatio
15-21 e
e pltol
s
*
Xo
e
p
i
c
-0.4set
-06
Rai Vabes.Telagrtecceheihr
22-28X
Figure 2-12: Correlation plot of all Rain Variables. The larger the circle, the higher
the absolute value of the correlation. Blue indicates positive correlation, red indicates
negative. An X indicates an insignificant correlation.
63
.
'
0.8
*
*0
e0*0
0.6
04
>K@
A
X
*
0
*
0
*
s
0.2
00
**
*
eo
*f~oeo
-0.2
0j
00
-
U
0..
'
0*0
0
00
.0400
0.000.0.000
S**0* 0
*e
-0.6
-
45
*
ee.e
1-7e0
*
14
10 .0 0
120
e
105X
30
60
*
*
180
0.,
*-0.4
XeX
X
e
><
IO-
I
*
365
22-28
15-21
4
8-14
29-58
150
0I GO
)(.M
*
1
2
3X
--- C
0,
*
to00
Figure 2-13: Correlation plot of all Pressure Variables. The larger the circle, the
higher the absolute value of the correlation. Blue indicates positive correlation, red
indicates negative. An X indicates an insignificant correlation.
64
9300
EEEEE EEE~EEEEE
CO
C,
U0"::
Ln~
EE EEEEEEEEEEEEEEEEEEEEEEEEEE
EE EEE EEEE EE EEE EEE
min45
min6O
mean45
max60
max45
mean60
min3O
mean30
max75
min75
max30
mean75
max90
min90
meanl4
mInl4
mean7
mean10
mean9
minlO
meanl-7
maxi 4
mini -7
max29-58
min2
min29-58
mean4
mW
maxIOS
meanl5-21
min15-21
mea3
mInlO5
maxi 0
mean29-58
min8-14
min4
mW
mean8-1 4
maxl-7
mean2
min22-28
mean22-28
max8-14
max15-21
mean105
min3
max22-28
meani
mWn
max12O
max4
minl2O
mini
meanl20
max3
max2
maxi
maxl5O
miniSO
meani 50
maxl8O
mini 80
meani 80
max365
min365
mean365
0.8
0.6
0.4
0.2
0
-0.2
-0.4
-0.6
-0.8
Figure 2-14: Correlation plot of all Temperature Variables. The larger the circle, the
higher the absolute value of the correlation. Blue indicates positive correlation, red
indicates negative. An X indicates an insignificant correlation.
65
Ranking of Variables
300
" Sensitivity Analysis Rank
250
to
-
200
" KS-test Rank
150
100
50
~~~= I!
=! _!2
EU~~~
1! G~
G~
G
cc
o
Pr 0.
ffl
0nLn c
~ ~
M- Mp-i0r
r
2 E E! V! V! E! 2!!!22 WWWE222!!!
E2
-~~ WE cc W~EE W ccc =! 9
ni
V
V. E~'~
V
VE
J
-I- iit
E- M-E-wMM009
!2 2 2
0
>
M
z
_j
Selected Variables
Figure 2-15: Combined rank of variables, from results of sensitivity analysis (red),
and KS-test (blue). Rank determined by the test results, lowest number being the
most significant variable.
be removed. Figure 2-16 is a plot of total model success by the number of variables,
fit with a regression curve. The success rate peaks near 75 variables, so the top 75
most important variables, as determined from the significance tests, were included in
future modeling attempts.
2.4.2
Unbalanced Data
When data is unbalanced, the model tends to favor the more populated class. Machine
learning applications such as cancer detection, image analysis, and speech recognitions
regularly confront this problem, and as such it has been a well-discussed issue in data
mining literature (Chawla 2005).
High damage slides tend to be much more rare than low damage landslides. The
data in use contains 2473 instances of landslides, 218 of which are classified as high
damage.
Several methods were considered to re-sample the training data, includ-
66
Accuracy by Number of Variables
0
0
4
**
0
0
*
I a
0~
0
-
IN
*
-
so
0
a
0
q*
-
0.65
0
0
50
100
Number of Variables
Figure 2-16: Model accuracy by number of variables, fit with a LOESS (Locally
weighted scatterplot smoothing) curve.
67
ing oversampling, random undersampling, SMOTE, Tomek links, Condensed Nearest
Neighbor, Edited Nearest Neighbor, Neighborhood Cleaning Rule, and One-Side Selection. Each of these will be explained in detail, and their success considered, in
subsequent sections. All of these are available in and utilized from the R package
"unbalanced" (Del Pozzolo 2014).
Unbalanced data also requires consideration of its performance measures, as a
measurement of total accuracy may not appropriately represent the cost of different
errors. In this machine learning application, high damage landslides are more important to detect, so a reduction in majority class detection would be favored in return
for a higher success rate in identifying the minority class. Though steps are taken to
balance the training data, the test data remains unbalanced, as it would be in a reallife application. For this reason, several performance measures are presented for each
modeling technique and refinement, including a confusion matrix, measurements of
precision, f-value, and recall, and a Receiver Operating Characteristic (ROC) curve,
and its corresponding measurement of the area under the curve (AUC). An ROC
curve measures the trade-off between true positive and false positive error rates. The
X-axis is percent false positive (%FP) = FP/(TN + FP). and the y-axis is percent
true positive (%TP) = TP/(TP + FN). Ideally, a model would classify all positive
examples positively, with no negative examples misclassified as positive. On an ROC
curve, this is represented at the point (0,100). Y = X, the line where %TP= %FP,
means that the results are no better than random guessing. The AUC can be used to
compare relative success between classifiers and data balancing methods. Precision,
recall, and f-measure are other measurements that are used to compare success among
methods. Precision is the rate of correctly identified positives over all the samples
classified as positive in the model. Recall is the proportion of true positives that were
identified over all the positive slides. Accuracy is the rate of correct classification for
both classes.
Precision=
68
TP
TP+FP
Recall =
F
-
TP
TP+FN
measure = (1 + 02) * precision* recall
32 * recall + precision
Recall and precision are frequently a tradeoff. Improving one may hurt the other,
since increasing a true positive may increase the rate of false positives. Improving
recall while not hurting precision is one of the primary goals for balancing the training
data. The F-measure combines precision and recall into one measurement of accuracy.
Prior to balancing, 20% of the data is set aside as a test set. It remains unbalanced.
80% of the data is considered a training set and various methods, each described in
more detail below, are used to balance it. To reduce uncertainty and random variation
in each method, the data is re-balanced five times, and on each of those five rebalanced
samples, the algorithm is applied ten times. The results are cumulative among the 50
times an algorithm is applied. A summary of the success of all the methods follows
the individual discussions of each.
Random Undersampling
Undersampling is one of the most straightforward and commonly used methods for
accommodating unbalanced data. It takes a random subset of majority class data
that equals the size of the minority class. This method is at risk of not using some
potentially important samples from the majority class, particularly when the minority
class is significantly smaller (Liu et al. 2009). The results of this method are shown
in Figure 2-17 and Table 2.1.
Random Oversampling
Oversampling replicates instances from the minority class at random until the two
classes are equal in size. The potential issue with this method is that it may overfit
because each sample that is replicated becomes unfairly weighted (Batista et al. 2004).
The results of this method are shown in Figure 2-18 and Table 2.2
69
Undersampling ROC
0
2
2
0
Actual
1.0
0.8
0.6
04
0.2
0.0
False Positive Rate
Figure 2-17: ROC curve, Undersampled
data
Table 2.1:
Data
High
Low
Accuracy
Predicted
High Low
27
16
133
318
0.169 0.952
Accuracy
0.628
0.705
0.698
Confusion Matrix, Undersampled
Oversampling ROC
0
d
-
2
Actual
1.0
0.8
0.6
0.4
0.2
0.0
False Positive Rate
Figure 2-18:
Data
High
Low
Accuracy
Predicted
High Low
7
36
17
434
0.292 0.923
Accuracy
0.163
0.962
0.893
ROC curve, Oversampled Table 2.2: Confusion Matrix, Oversampled Data
70
SMOTE ROC
Actual
1.0
0.8
0.2
0.4
06
Fadse Posdtive Rate
0.0ow4
High
Lw4
Accuracy
Figure 2-19: ROC curve, SMOTE
Predicted
High
Low
29
14
0
48
0.246 0.934
Accuracy
0.326
.0
0.0
0.854
Table 2.3: Confusion Matrix, SMOTE
SMOTE
SMOTE (Synthetic- Minority Oversampling Technique) is a method which combines
random undersampling with an oversampling technique that creates synthetic minority class instances. In this application, the method doubles the number of minority
class samples, and the majority class is double the number of synthetic samples. The
creators of this method found that if offered improvements over oversampling with
replacement because of a lower likelihood for an algorithm to overfit the minority class
data. New samples are created by identifying a sample's nearest neighbor, taking the
difference between those two vectors, multiplying the distance by some random number between 0 and 1, and adding it to the sample (Chawla 2002). The decision region
is then forced to be less specific than under random undersampling. The results of
this method are shown in Figure 2-19 and Table 2.3
Condensed Nearest Neighbor
The following several methods differ from the first three in that they aim to preprocess the dataset by removing samples which may interfere with the creation of a
clear boundary, under some application that uses a sample's nearest neighbor. This
is a more focused way of balancing a dataset, but in this application has generally
71
Condensed Nearest Neighbor ROC
2
o
1.0
0.8
0.2
0.4
0.6
False Positive Rate
Actual
0.0
Figure 2-20: ROC curve, CNN
High
Low
Accuracy
Predicted
High
Low
8
35
443
8
0.500 0.927
Accuracy
0.186
0.982
0.913
Table 2.4: Confusion Matrix, CNN
fallen short of creating a significant difference in the data or the success. The data
largely remains very unbalanced. The first of these, the Condensed Nearest Neighbor
rule is one such method. It identifies the samples that are unable to be classified
using a one-nearest-neighbor rule (their nearest neighbor is from a different class)
and removes them (Batista et al. 2004). The results of this method are shown in
Figure 2-20 and Table 2.4
Edited Nearest Neighbor
Edited Nearest Neighbor is similar to Condensed Nearest Neighbor in that it looks
for majority points which differ from their neighbors, but it changes the criteria from
one nearest-neighbor to removing all those points which differ from at least two of
their three nearest neighbors (Batista et al. 2004). The results of this method are
shown in Figure 2-21 and Table 2.5
Tomek Links
A pair of points is considered a Tomek Link when the pair is of different classes, but
no other point in the dataset is closer to either one. When used as an undersampling
method, only the majority class samples are removed (Kotsiantis 2006). The results
72
Edited Nearest Neighbor ROC
2
Predicted
High Low
Actual
1.0
0.8
0.6
0.4
0.2
0.0
False Positive Rate
High
Low
Accuracy
Figure 2-21: ROC curve, ENN
8
3
0.727
Accuracy
35
448
0.186
0.928
0.923
0.993
Table 2.5: Confusion Matrix, ENN
of this method are shown in Figure 2-22 and Table 2.6
Neighborhood Cleaning Rule
Neighborhood cleaning rule acts similarly to edited nearest neighbor in that it removes
majority samples whose three nearest neighbors are from the minority class. It also
removes the nearest neighbors of minority class samples which fall into the majority
class (Batista et al. 2004). The results of this method are shown in Figure 2-23 and
Table 2.7
One-Side Selection
One side selection combines two methods that were previously applied individually.
It first processes data with the Tomek link method, and follows this with the Neighborhood Cleaning Rule (Batista et al. 2004). The results of this method are shown
in Figure 2-24 and Table 2.8.
Summary
The summary values may not match the values presented in the confusion matrices
above, because they are an average over many runs of the algorithm, instead of one
73
Tomek Links ROC
060
2
Actual
1.0
0.8
0.2
0.4
0.6
False Positive Rate
0.0
High
Low
Accuracy
Predicted
High Low
34
9
6
445
0.600 0.929
Accuracy
0.209
0.987
0.919
Table 2.6: Confusion Matrix, Tomek Links
Figure 2-22: ROC curve, Tomek Links
Neighborhood Cleaning Rule ROC
0
a-.
2
0
Actual
1.0
0.8
0.4
0.6
0.2
False Positive Rate
0.0
High
Low
Accuracy
Predicted
High Low
11
32
6
445
0.647 0.933
Accuracy
0.256
0.987
0.923
Table 2.7: Confusion Matrix, NCR
Figure 2-23: ROC curve, NCR
74
One-Side Selection ROC
0
2
Predicted
High Low
Actual
0
1.0
0.8
06
0.4
0.2
High
Low
0.0
9
Accuracy
False Positive Rate
Figure 2-24: ROC curve, OSS
10
0.474
Accuracy
34
0.209
441
0.978
0.928
0.911
Table 2.8: Confusion Matrix, OSS
sample of the model. Each measurement is made on the same test set.
Table 2-25 is a summary of the results. Accuracy is high for many of the methods,
but this number is misleading because of how poorly most of the methods perform
in identifying high damage slides, as seen in the measurement of recall. The purpose
of these balancing methods was to raise the success of classifying high damage slides,
so precision, recall, and AUC should be considered before total accuracy. The AUC
measurement tells a different story than the accuracy -
some of the highest accu-
racy rates have the lowest AUC measurements. Moving forward, Undersampling and
SMOTE and both retained as methods of balancing the testing data. Undersampling
produces the highest recall success, meaning it has the highest amount of high damage slides classified as high. It also has the third highest AUC score. SMOTE is also
retained because of its high AUC curve and high recall. Any further refinement and
runs of the algorithm are performed with both SMOTE and undersampling the test
data.
75
Method
No Balancing
Oversampling
CNN
ENN
NCR
OSS
SMOTE
Tomek Links
Undersampling
High
Damage
Training
Low
Damage
Training
Samples
Samples
174
1804
174
174
174
174
522
174
174
1804
1804
1800
1800
1507
1675
696
1673
174
Accuracy AUC
0.911
0.898
0.911
0.911
0.908
0.909
0.833
0.909
0.686
0.601
0.6806
0.600
0.600
0.601
0.604
0.635
0.603
0.620
Precision Recall
F-measure
0.447
0.324
0.438
0.439
0.385
0.414
0.180
0.417
0.133
0.157
0.210
0.154
0.155
0.159
0.184
0.213
0.186
0.208
0.095
0.155
0.093
0.094
0.100
0.119
0.261
0.120
0.473
Figure 2-25: Results of balancing training data
2.4.3
Voting
Mean Votes and Number of Votes
When a random forest function votes on each sample, it produces creates a vote
between 1 and 0. This is a measurement of the percentage of trees which vote for
the classification to be in the high damage category. At default, each vote above 0.5
is classified as high damage, and each below that value is classified as low damage.
The closer the vote is to the extremes of 0 and 1, the more certain the model is of
its decision. The model's success is best for those samples it votes on either end of
the spectrum, as can be seen in Table 2.9 and 2.10. Figure 2-26 is the density plot
of mean votes produced by balancing the data using SMOTE, and Figure 2-27 is a
density plot of the mean votes produced by undersampling the training data.
Under different runs of the algorithm, the same sample could produce multiple
different votes, which explains why the total number of samples that were voted on
is larger than the total size of the test set, and also offers another way to potentially
improve classifier performance. Over many runs of the same algorithm, the results
were gathered. In an attempt to improve performance, the final classification was
considered for both the mean vote over all algorithms and the number of votes for
high vs. low classification. Figures 2-29 and 2-28 shows the variance of votes for all
76
Vote
1.0-0.9
0.9-0.8
0.8-0.7
0.7-0.6
0.6-0.5
0.5-0.4
0.4-0.3
0.3-0.2
0.2-0.1
0.1-0.0
High Damage Samples
176
127
107
131
164
323
348
513
230
31
Low Damage Samples
65
149
324
441
767
1873
3918
6743
6044
2226
Accuracy
0.7302905
0.4601449
0.2482599
0.2290210
0.1761547
0.8529144
0.9184248
0.9292999
0.9633408
0.9862650
Table 2.9: Votes produced when data is balanced with SMOTE.
Density Plot of Mean Votes, SMOTE Results
C4J
U,
_
0
_
C
C;
0.0
0.2
0.6
0.4
0.8
1.0
Mean Vote
Figure 2-26: Density plot of the voting results, with SMOTE data.The red line shows
high damage slides, the green line shows low damage instances.
77
Vote
1.0-0.9
0.9-0.8
0.8-0.7
0.7-0.6
0.6-0.5
0.5-0.4
0.4-0.3
0.3-0.2
0.2-0.1
0.1-0.0
High Damage Samples
388
491
803
1480
3582
409
258
126
25
20
Low Damage Samples
378
154
142
273
365
5908
5492
2868
1303
235
Accuracy
0.4934726
0.2387597
0.1502646
0.1557330
0.0924753
0.9352541
0.9551304
0.9579158
0.9811747
0.9215686
Table 2.10: Votes produced when training data is undersampled.
Density Plot of Mean Votes, Undersampled Results
0_
Nl
0.0
0.2
0.6
0.4
0.8
1.0
Mean Vote
Figure 2-27: Density plot of the voting results, with undersampled data. The red line
shows high damage slides, the green line shows low damage instances.
78
Variance of Votes
0.00
0.05
0.10
0.15
Vadance
Figure 2-28: Variance of voting results for data that has been balanced with SMOTE
the samples. The results were relatively stable because the variance was very low in
the majority of cases.
A classification was determined based on the results of many runs of random
forest. The same random forest algorithm is run many times, enough so that all of
the instances make it to the test set, which creates a distribution of votes for each
instance. The results below show a summary of results for each method.
in both cases, recall was improved by using the mean or number of votes. However, the more that recall improved, the lower precision became. The f-measure was
improved in both cases, but more so in the case of using the mean vote.
79
Variance of Votes
CD,
0.00
0.02
0.06
0.04
0.08
0.10
0.12
Variance
Figure 2-29: Variance of voting results for data that has been undersampled
Method
Accuracy
Precision
Recall
Undersampled, Vote
Undersampled, Mean Vote
Undersampled, Number of Votes
SMOTE, Vote
SMOTE, Mean Vote
SMOTE, Number of Votes
0.686
0.719
0.685
0.833
0.866
0.853
0.133
0.176
0.161
0.180
0.288
0.266
0.473
0.596
0.610
0.261
0.353
0.381
Figure 2-30: Summary of voting techniques
80
Fmeasure
0.208
0.272
0.254
0.213
0.318
0.313
larg
ti*
Legend
winter slie lations
* small
summnr slide locations
* large
* smal
Figure 2-31: Swiss landslides separated by season.
2.4.4
Separation into Seasons
Many of the rain variables proved to be influential to the success of the model, as
shown in the sensitivity testing. Rain patterns vary significantly between seasons, as
also shown in Chapter 1, when using the analogue method to examine atmospheric
conditions showed a marked difference in the extremity and extent of the atmospheric
variables. A KS-test done between the winter and summer slides confirmed the difference in weather conditions between slides from each season.
For these reasons,
modeling was attempted on each of the seasons separately. The most effective data
refinements, as discussed above, were also followed, meaning that the variables were
narrowed to only those deemed to be significant, SMOTE and random undersampling
were both considered for balancing the data, and the mean vote over many models
was used.
Figure 2-31 shows a map of the winter and summer landslide locations,
separated by season.
Table 2-32 shows the results when the seasons are modeled
individually.
Modeling the summer landslides in particular had high success rate. Some of the
81
Season
DJF
DJF
MAM
MAM
JJA
JJA
SON
SON
No.
of Instances
345
345
661
661
1141
1141
326
326
Method
Accuracy
AUC
Precision
Recall
Fmeasure
SMOTE
Undersampled
SMOTE
Undersampled
SMOTE
Undersampled
SMOTE
Undersampled
0.8126
0.5699
0.8097
0.5718
0.8958
0.7403
0.8522
0.6910
0.5474
0.5557
0.5804
0.5705
0.7276
0.7912
0.6974
0.7074
0.1039
0.0918
0.1284
0.0997
0.3143
0.2108
0.2323
0.1456
0.2080
0.5550
0.2186
0.5105
0.4683
0.6591
0.3870
0.6070
0.1386
0.1576
0.1618
0.1668
0.3762
0.3195
0.2903
0.2349
Figure 2-32: Summary of season-separated results
other seasons may not have had enough high damage slides to produce a successful
model. The summer has almost double the number of slides as any other season.
The primary variable that made this season different from the rest was the amount
of rain.
2.5
Results
Without tuning, the model had a base success of 91.1%, but an AUC of 0.601, precision of 0.447, recall of 0.095, and F-measure of 0.157. Without any refinement,
it performed very well at identifying low damage slides, but this is primarily because most of the samples were low damage samples. The high value for precision
shows that, of the slides it classified as high damage, a high fraction were actually
high damage, but the very low value for recall shows how few high damage slides
were identified correctly by the algorithm. Tuning was able to significantly improve
results, particularly in the model's ability to recognize high damage slides. See Table 2-33 for the these results. The best results were reached when the number of
variables was reduced, based on a combination of KS-test results, sensitivity analysis,
and Pearson Correlation, to remove variables which were mostly noise. The data
underwent a number of tests to accommodate the unbalanced data which included
balancing the training data using SMOTE, undersampling, oversampling, condensed
82
Method
SMOTE
Undersampled
Accuracy
0.8958
0.7403
AUC
0.72764
0.7912
Precision
0.3143
0.21080
Recall
0.4683
0.6591
F-measure
0.3762
0.3195
Figure 2-33: Summary of best results on JJA slides. Tuning methods include separating the seasons, reducing the variables, using the mean vote, and balancing the
training data.
nearest neighbors, edited nearest neighbors, neighborhood cleaning rule, one-sided
selection, and Tomek links. The most successful approaches to balancing the training
data were SMOTE and undersampling, because they were able to properly emphasize
the minority class without causing the model to overfit, as determined from measurements of recall and the area under a ROC curve (AUC). For stability over many
random forest classifications, the mean vote and the number of votes for each class
were considered as a final classification technique. The mean vote improved classification success more significantly than did the number of votes. Separating the seasons
improved success for the most populated season, but not for the others. Best success
is achieved with just the JJA slides, reducing the number of variables to 75, using
the mean vote, either undersampling the majority class or populating the minority
class with SMOTE. With all of this, the success reaches the levels shown below, in
the summary Table 2-33
The two different methods have different strengths. The recall is higher when using
undersampled data, which means that it correctly identifies more high damage slides,
though at the cost of more false positives. SMOTE classifies fewer slides correctly as
high damage, but the precision is higher, meaning there are fewer false positives. The
approach that would be chosen depends on the application. If using a precautionary
approach,high recall and low precision is preferable. In this case one is more cautious
and would rather regard more slides as potentially high damage to protect an area
from damage, but at the cost of unnecessarily protecting against some low damage
slides.
False positives and false negatives are a persistent problem in any modeling
method and in any real world application of models, but the success that was achieved
83
means that this model is a tool which has potential for real world use. This method
provides a convenient, computationally efficient means of recognizing high damage
landslides, which can be applied to landslide activity in the future. Vulnerability
is a complicated measurement, and this method relieves the pressure of advanced
calculations and site-specific studies.
2.6
Discussion and Future Work
The goal of this study was to prove that machine learning is a technique which can
improve upon vulnerability measurements for landslides. Random forest algorithm
was trained, tested, and refined on a large collection of slide instances. Validation
of the model, a process which is frequently neglected in landslide prediction studies,
provided valuable measures of success (Chung and Fabbri 2002). Historical databases
of landslide occurrence and damage have thus proven useful not only for predicting the
occurrence of a landslide, but also the impact of a slide once it happens. High damage
landslides have been shown to be caused by a combination of anthropogenic and
temporal weather variables. This data that was used is all public access and widely
available in many areas around the world, so the method offers practical applications
in a variety of circumstances and places.
To improve upon the study, and as recommendations for future work, several other
types of information would have been helpful, but were not included largely for issues
of data availability. The greater the amount of detail available about each slide, the
more robust a modeling attempt can be (van Westen et al. 2008). Information about
previous landslides that happened on the same sites, whether any construction has
been done to stabilize the slope, or information about indirect damage are just a few
things that could have enhanced this modeling. Other characteristics of a slide would
have been helpful, such as the volume or the speed, as it is predicted that slides that
travel more quickly and move more volume have a higher damage potential, given
where they are situated (van Westen et al. 2006).
The most difficult data to obtain is the one which is most essential, historic
84
databases of slide occurrence. Data quality is one of the most significant problems
facing this sort of analysis, or any analysis of landslides (van Westen et al. 2008).
Substantial historic datasets with reliable and consistent information are difficult to
find. Modeling was first attempted on a dataset from Oregon, but due to data quality issues, many of the results are incomplete. The dates recorded for the landslides
were found to be unreliable, which makes many of the characteristics included in the
feature vectors difficult to compute, such as weather patterns, population, or other
date-dependent information. Dates can be unreliable if there is uncertainty about
when a landslide happened, and this is likely for many methods of data gathering.
To link temporal features and triggering factors to landslides, the landslides need to
either be dated individually or through an inventory of specific event-based occurrences (van Westen et al. 2008). This is mostly compatible with methods such as
surveys or news reports. In Oregon, the inventory is a compilation of many original
sources with no standardization between individual instances. The certainty of dates
is unclear, and there is high variability in the precision of the dates. Without temporal information, a complete analysis of the sort done in Switzerland is unable to be
performed. See Appendix A for a further discussion of damage modeling in Oregon,
and more specificity regarding data quality.
Additionally, this analysis has the potential to be expanded to other areas. Most
of the available data is from high-income countries, but these countries rarely incur
extremely serious damage from landslides. The developing world is at great risk for
severe damage and large losses of life because of settlement and construction patterns,
deforestation, and various other human-influenced features. Because we were unable
to find sufficient available data from the developing world with which to test the
results, the model can not be said to be applicable to significantly different regions.
For example, the cause of the highest damage landslides in the developed world are
frequently those along roads, as construction codes prohibit the building of residential
areas on extreme slopes. Therefore, there are few examples of landslides in highly
urbanized areas, and for those that do occur, the damage is generally low. In contrast,
many of the most severe landslides in the developing world have occurred in densely
85
populated city regions. In recent years there was a 2008 landslide in Cairo which
killed 119 people and a 2010 slide in Rio which killed over 200. Over 125,000 people
live in landslide-prone slums in Mumbai (Kamath 2013).
Including expected climate change is another future application of this work, which
would analytically tie the two studies done in this thesis together. If a model can estimate high damage landslides with weather as one of the predictive features, it could
use the expected intensity of future precipitation events as an input for prediction of
landslide damage.
86
Chapter 3
Using Landslide Risk Models in a
Policy Context: Best Practice and
Recommendations
3.1
Rationale for Using a Model of Vulnerability
36 of the states in the United States have areas of moderate to high severity landslide
hazard (Spiker and Gori 2003). With climate change and population increases that
cause expanding development and infrastructure onto unstable hillsides, landslide loss
is expected to increase in the future. The United States is hardly alone in expecting
this trend. The USGS has recommended that this can be curbed through increased
hazard mapping and response (Spiker and Gori 2003). Predicting disasters allows
for proper preparation, evacuation if possible, best practice urban and transportation
planning, and preservation of life and property. Small scale disasters such as landslides
offer challenges and uncertainty in modeling, and also often receive less attention that
larger disasters because of the relative scale of damage for a severe event (Rice 1985).
However, several areas around the world do have warning systems in place, based on
hazard models and historic data. Hong Kong, for example, has a landslide inventory
of over 40 years (van Westen et al. 2008). Since 1984, they have had a warning system
87
in place which monitors rainfall data and issues a warning if conditions are such that
numerous landslides are expected (Chau et al. 2004). This section discusses the
challenges that still remain to implementing the modeling technique here presented
and the benefits that it would provide to both private and public sectors. It also
offers recommendations and an analysis of the models discussed in this paper, should
they be used in a real-world application.
3.2
Potential Uses
Currently, landslides are under-recognized as a serious hazard. They can be concurrent with other, larger-scale disasters such as flooding, extreme rain, or earthquakes.
Small landslides are frequent and larger landslides more rare, but the cost of frequent
landslides adds up to the point where annually, millions of dollars of damage can
be incurred. Landslides cause an estimated $1-2 billion dollars of economic damage
annually in the United States (Dai et al. 2001). Landslides also frequently strike
the same area twice, so the same road or other urban feature can have recurring
problems that may seem to be a minimal threat initially, but become serious very
quickly. When building in areas prone to landslide activity,other priorities may take
preference over the threat of landslides. For transportation networks, the most direct
way to plan a route may be to cut a road into the side of a hill. There may be cost
factors that go into building on a hillside - it may be cheaper to build in a particular
area, but the costs of future damage go unconsidered. Vacation homes are built on
coastal slopes that are prone to failing, but the view is excellent while the house lasts.
Entire neighborhoods have been washed away after one severe event. Countering
these and many other challenges is important to public safety and reducing the costs
of landslides, both private and public.
In the private sphere, landslides are generally not covered by standard homeowner's insurance, and specialty insurance is very expensive in the places where it
is available (Schuster and Highland 2007).
For this reason, many who are at risk
for landslides have no financial recourse if one does happen. The modeling technique
88
presented here is designed to recognize high risk areas on a small scale, which is useful
for homeowners trying to measure their risk and insurance companies attempting to
accurately evaluate risk. The model could have an interface where one could look
up their home address and identify their risk. For example, the interface for the
Statewide Landslide Information Database for Oregon (SLIDO) already has a a feature where an address can be searched for, and historical landslides nearby can be
found. As it currently stands, the interface only contains information about historic
occurrences, but the likelihood of landslide reactivation, or a risk evaluation based
on a combination of vulnerability and hazard models would allow homeowners to
evaluate their personal level of risk and make an informed decision about managing
financial loss and recognizing when an insurance policy is advisable.
Public responsibility for hazard management affects many policy spheres, such
as setting building codes, transportation planning, and hazard mitigation.
Many
approaches can be considered as methods to reducing landslide impact, including restricting development in hazardous areas, construction codes, geo-engineering prevention and control measures (such as drainage and supportive structures), and warning
systems (Dai et al. 2001). This model, and the indicators of vulnerability that it
identifies, can be used as one tool to recognize priority areas for policy intervention
(Birkmann 2007). All areas which are prone to landslide activity are not a priority.
Many landslides have relatively low damage, and the costs of pre-event mitigation
may outweigh any benefit gained. Risk thresholds are determined by what individual
and societal priorities are willing to accept (Dai et al. 2001). A detailed cost-benefit
analysis for mitigation versus post-event response is outside the scope of this work,
but the locations expected to be high damage are likely to have the highest value
return (in terms of loss avoided) for mitigation investment.
Increased frequency and severity of events with climate change may make mitigation only more important in the coming years. Preparing for the future by evaluating
risk based on many different Investment in engineering solutions may be necessary,
particularly to protect areas that may not have been at as great of risk in the past.
The modeling technique presented here is easily adaptable to future scenarios, once
89
it has determined the function that relates causal factors to damage incurred.
3.3
Model Application
Using machine learning to create a model of landslide damage is a method that is
broadly applicable over many test sites. In creating a model for a new area, the same
process that was followed in PartII would be used, from creating the feature vectors
to refining the algorithm. A user would have to have information about all of the
important variables as determined by this model, and preferably more if available. All
the data for feature variables that was accessed for this research is publicly available
and straightforward to analyze using software such as GIS. Even if certain areas do
not maintain good data on features such as population density or land cover, this
information is largely available from global satellite data. Transportation network
data is frequently available from private sources, such as companies which provide
maps for GPS systems.
In order to maintain accuracy, data should be available
in short intervals. In creating feature vectors for a landslide, the more years that
separate the feature data and the landslide date, the higher the likelihood that it is
inaccurate and will yield incorrect results.
The one uncompromisable set of data is a database of historical landslides, which
must include date, location, and damage caused by each landslide entry. The most
difficult piece of the data to obtain is the most essential part. This is the most
substantial challenge to overcome before vulnerability modeling such as the sort developed here can be implemented accurately and in many areas. Many studies have
called for a standardized practice in recording landslide occurrence, and increased frequency of this recording (van Westen et al. 2008). The need for a centralized agency
or group responsible for collecting this data is apparent, though many places do not
have one or recording is only prioritized for high landslide frequency time periods,
such as after a particularly bad rainstorm. Additionally, in public records slides that
impact private property largely go unreported because of the lack of insurance coverage, or the relatively small scale and high frequency nature of these events. Several
90
methods are available for creating landslide inventories, such as aerial photography,
field mapping, and newspaper archives. One of the most useful methods for analyzing
landslide vulnerability are inventories of new reports, such as the Swiss Flood and
Landslide Database which was used here, which are very likely to have a recording
of damage, date, and location. However, they are less likely to contain technical information such as volume, failure mechanism, and landslide type. Inventories made
from remote sensing, image interpretation, or field mapping are more likely to contain
these characteristics, but at the cost of exact dating and records of damage.
This modeling technique would be most effective when combined with a measurement of hazard to make a complete estimate of risk. Risk maps could be produced,
though with the recognition that they are only valid for present conditions. Conditions affecting causal factors (such as weather patterns, which may be altered with
climate change) and elements at risk (such as population density or the locations of
buildings) are frequently changing, meaning that risk maps need to be updated and
adapted as necessary.
Landslide analysis is dominated by uncertainty, which can make proper application
of model results difficult (Dai et al. 2001). The success that this model was able to
achieve means that the results are subject to uncertainty, particularly in prediction
of high damage slides. Further refinements and better data could reduce possibly
increase confidence, but a certain degree of uncertainty is inevitable. A policymaker
could choose to recognize the uncertainty and be proactive and precautionary in
mitigation, which will likely have some financial cost, but will likely have later benefits
in terms of structures and lives saved.
91
92
Appendix A
Damage Modeling in Oregon
As mentioned in Chapter II, Section 6, the first area studied was Oregon, a state
which has a large centralized landslide database.
Because of data quality issues,
results were not strong, but the work still merits discussion. The goal of this analysis
was the same as that for Switzerland, to evaluate areas for vulnerability to landslides
based on probabilistic modeling of past damage records.
A.0.1
Data
The Oregon Department of Geology and Mineral Industries maintains a database of
.
landslides called SLIDO (Statewide Landslide Information Database for Oregon)
The records are gathered from a variety of published sources, including Department
of Transportation Records, published papers, and surveys taken after storms. Quality
varies among these records, in the information they include. A subset of the slides
include exact dates, and a further subset contains information about what damage
was caused. Some have damage in an amount of money, others have a description
of the event and its impact. Figure A-1 shows the location of all the slides in the
dataset. Red indicates that there is information about the damage. Most of the
damage records had an original source in the Oregon Department of Transportation
(ODOT) and you can see that there are many areas where the slides follow along the
roads.
93
Figure A-1: Location of slides in Oregon, mapped with the highway system. Green
points do not contain records of damage, red points do.
94
Selected Damage, from ODOT
measured Landslides and Rockfall
800
700
600
500
400
300
200
Z 100
Figure A-2: Type of damage caused by landslides in the SLIDO records
Approximately 3400 landslides had an estimate of damage. About 600 of those
were from sources other than ODOT. Figure A-2 shows some of the most common
types of damage.
Because of the inconsistency of damage records, several options were considered for
ways in which to measure damage. A subset of slides containing damage information
had a monetary estimate, but a larger number had descriptions.
The monetary
estimates were also a biased set - they were largely ODOT sources, meaning that all
of the damage impacted road features, none of them caused damage to other features
like buildings or agriculture. Direct and indirect damage were also included in many
cases. Figure A-3 shows the miles of detours caused by landslides. An estimate of
indirect loss can be calculated from this measurement, because it gives an estimate
of time lost in travel, which impacts economic activity.
Intensity scales are a common way of measuring impact from natural disasters.
The most recognizable ones are the Mercalli scale of earthquake intensity, and the
95
Landslides Causing Detour, by
Miles of Detour
140
100
-
120
S80
0
E
40
20
20
0-3
10-30
30-60
> 60
Detour in Miles
Figure A-3: Length of detours caused by Oregon landslides.
Saffir-Simpson hurricane scale (Wood et al. 1931) (Simpson and Saffir 1974). Intensity scales provide a simple, easy to communicate estimate of damage. Scales have
been proposed for use with landslides, yet none is widely used. Pettruci developed
a scale, called the Support Analysis Framework, which was applied to areas in Italy
(2009). The scale determines a normalized score for damage, based on separating a
description of the damage into categories of elements, and how much damage was
sustained by each element on a scale from 0-1 (generally none-complete destruction).
Damage is added from all categories, and normalized according to the maximum
amount of damage that could be sustained over all categories. This scale was applied
to descriptions of damage in Oregon. Some sample descriptions are "3 homes isolated,"
"Creek bed filled in with slide material, washed out part of roadway and shoulder,
flooding out field," and "Roaring River Bridge - One lane traffic due to temp one lane
bridge." A code was written to process text descriptions by identifying key words,
but it proved difficult to apply and required manual sorting because of low accuracy.
96
1800
7-
1600.
U
1400.
U
1200
1000'..
800
E
3
600
400
0
0
0.01
0.02
-
-
200
0.03
0.04
0.05
0.06
Normalized Direct Damage
Figure A-4: Distribution of values of direct damage for Oregon slides, measured on
an intensity scale.
This method is not a quick way to sort slides, making it unfeasible for applications
with large datasets, unless an intensity scale were used on initial recording of the
slide, or if a monetary estimate of damage was unobtainable. Figure A-4 shows the
distribution of direct damage when classifying all the slides. Figure A-5 shows the
total amount of damage, both direct and indirect included. The peaks correspond to
the levels of road damage, which is still where most of the damage occurs, because
the majority source of records is still ODOT.
Instead of using the intensity scale for the modeling application, the set of modeled
slides was narrowed to only the slides with a monetary record of damage. The slides
with a monetary amount of damage had a distinct pattern when plotted on a log
scale. Figure A-6 shows the distribution. No explanation in the data could be found
for this distribution, such as all slides with one type of damage being sorted into one
peak. This provided for a convenient way to separate the data by peak into low and
high damage categories. Based on this distribution, Figure A-7 shows the landslides
97
1800
1600
1400
1200
1000
-o
800
z
400
200
0
0
M
wml
0.005
0.01
-
M
0.015 0.02 0.025 0.03
Normalized Total Damage
0.035
0.04
0.045
Figure A-5: Distribution of total damage for Oregon slides, measured on an intensity
scale.
98
35
30
25
10
S15.
10
5.
4
6
8
10
12
Log(damages)
14
16
18
Figure A-6: Distribution of dollar amount of Oregon landslide damage, plotted on a
logarithmic scale.
mapped by damage. Red points are high damage landslides and green points are low
damage.
The final decision was to use those slides with a dollar estimate of damage, because
using an intensity scale is subject to manual sorting error and the dollar estimate had
a clear division for classification. 1166 slides were included in this set. Feature vectors
were created for all landslides that were initially considered to have reliable dates and
a dollar estimate of damage. The variables included were largely the same as those
considered for Switzerland, including anthropogenic variables and weather variables.
The source of population density was the same as for Switzerland. Figure A-9 shows
population density, which came from NASA's Socioeconomic Data and Applications
Center.
This dataset was discussed in a previous section.The red line is the high
damage slides, the blue line is the low damage.
Figure A-8 shows the distribution
of land cover over all the slides. Land cover came from the National Land Cover
Database, which classifies land over the entire United States into 16 different land
99
Figure A-7: Location of slides in Oregon, separated by amount of damage, as determined in Figure A-6.
100
Oregon Landslide Land Cover
Open Water
Developed High Intensity
Cultivated Crops
Pasture
Mixed Forest
Shrub
Woody Wetlands
Emergent Herbaceous Wetlands
Barren Land
Grassland
Developed Medium Intensity
p
I
I
U
Developed Low Intensity
-
Developed Open Space
0
100
200
300
-
-
Evergreen Forest
400
500
600
700
Figure A-8: Distribution of land cover for Oregon slides.
cover categories at a 30 m resolution (Homer et al. 2007). Transportation network
data was drawn from the Oregon Department of Transportation, accessed through
the Oregon Spatial Data Library. The distribution of distance to the nearest highway
for all slides is shown in Figure A-10. This confirms that most damage has taken
place very near a highway.
Rain was initially considered as part of the feature vectors, but the models performed better without it. Over a 10% improvement in success was recorded when all
the rain variables were removed. Looking at the details of the rain, over 500 slides
were without rain in the past week. As rain is the most common trigger of landslides,
this looked unusual and as such the dates in the dataset could not be treated as
reliable. Because the slides were largely from original ODOT records, one possible
explanation is that the dates reported are the dates when a repair occurred, not the
date on which the landslide happened. Earthquakes are another trigger of landslides,
but there was no correlation between these two events.
101
Distribution of Population Density over Oregon Landslides
C)
CD
ci,
C
S
0
CD
a
0
05
0
500
1000
1500
2000
Population Density
Figure A-9: Distribution of population density for Oregon slides. The red line is high
damage slides, the blue line is low damage slides.
0
CD
-
Distribution of Distance to Nearest Highway over Oregon Landslides
0
0
Cv,
0
CJ
0
0
0
2
4
6
8
10
12
Distance to Nearest Highway (km)
Figure A-10: Distribution of distance to nearest highway for Oregon slides. The red
line is high damage slides, the blue line is low damage slides.
102
A.0.2
Modeling
Many of the same techniques that were used in modeling the data from Switzerland
were also used on the Oregon data. Random forest was used as the modeling algorithm
and the training data was similarly balanced by undersampling the majority class.
Weather was removed from the modeling due to distrusting the dates of the landslides.
The final list of variables considered is:
1. Population Density
2. Type of Land Movement
3. Land Cover
4. Distance to Nearest[Road, Highway, Railroad]
5. Length of [Road, Highway, Railroad] in [0.12,2] km
6. Number of [Roads, Highways, Railroads in [0.12, 2] km
7. Elevation [at point, minimum, maximum, mean]
8. Top [5, 10, 25, 50]% Gradient [minimum, maximum, mean, standard deviation]
All algorithms were run on data that had been sorted into 80% training, 20%
testing. Any results presented are the results on the testing set.
A.0.3
Results
The best success achieved was 75-80% with balanced success between high and low
damage slides. The top 10 most significant variables were, in decreasing levels of
significance:
1. Number of Highways in 2 km
2. Length of Highway in 2 km
3. Distance to Nearest Railroad
103
4. Length of Highway in 0.12 km
5. Closest Highway
6. Number of Railroads in 2 km
7. Mean Top 50% Gradient
8. Length of Railroad in 2 km
9. Minimum Top 25% Gradient
10. Number of Roads in 0.12 km
These results are mostly expected, as there is great homogeneity in the type of
data presented in the dataset. The damage is largely highway damage, and the more
highways there are in an area, the more likely the damage is to be high. This model
has no temporal aspect, as rain was a poor indicator of damage, unlike with the
results in Switzerland. Though the results may be expected, they present an efficient
method of applying risk analysis over a large area. All of these features that impact
the amount of landslide damage are generally readily available, frequently updated,
and easy to extract using GIS software. When combined with a hazard map, this
measurement of vulnerability could create a map of risk over a wide area. Risk maps
at a small scale could in this way be computed with great efficiency and just a few
inputs, making this a promising way for a policy maker or planner, who may have no
particular expertise in this area, to avoid high risk areas.
This case serves as an example explaining the need for high quality, consistent
data with clear records about the shortcomings and uncertainty present. A temporal
aspect to this analysis would have been preferable, but was unable to be performed
because of data quality..
104
Appendix B
Variable Importance Results
This appendix presents the results of variable testing, as discussed in Chapter II,
Section 4.1. It includes results from a KS-Test, comparing the values of each variable
between high and low damage slides. It also includes the results of sensitivity analysis, where each variable was removed from the model individually and the resulting
increase or decrease in success was recorded.
B.O.4
KS-Test results
Table B.1: KS-test results for all continuous variables. Includes the test variable and
a p-value of significance.
Variable
KS-Statistic
P-Value
30 Day Rain
0.312
0.OOE+00
4 Day Rain
0.294
2.44E-15
Days 1-7 Rain
0.292
4.00E-15
45 Day Rain
0.284
2.58E-14
Days 22-28 Pressure
0.283
2.93E-14
3 Day Rain
0.271
3.80E-13
10 Day Rain
0.268
7.18E-13
Continued on next page
105
Table B.1 - continued from previous page
Variable
KS-Statistic
P-Value
7 Day Rain
0.264
1.97E-12
14 Day Rain
0.261
3.56E-12
120 Day Rain
0.246
7.36E-11
150 Day Rain
0.245
8.48E-11
60 Day Rain
0.237
4.40E-10
45 Day Pressure
0.234
6.72E-10
30 Day Pressure
0.225
3.69E-09
75 Day Rain
0.224
4.44E-09
2 Day Rain
0.213
2.85E-08
90 Day Rain
0.213
3.01E-08
105 Day Rain
0.210
4.71E-08
180 Day Rain
0.203
1.44E-07
365 Day Min Temperature
0.186
2.29E-06
75 Day Pressure
0.184
3.OOE-06
365 Day Mean Temperature
0.179
5.53E-06
14 Day Pressure
0.177
7.90E-06
Days 22-28 Rain
0.177
8.04E-06
60 Day Pressure
0.172
1.46E-05
365 Day Max Temperature
0.169
2.24E-05
Days 15-21 Rain
0.166
3.34E-05
4 Day Max Temperature
0.166
3.39E-05
3 Day Max Temperature
0.158
9.67E-05
90 Day Pressure
0.154
1.55E-04
10 Day Pressure
0.152
2.08E-04
Days 22-28 Mean Temperature
0.151
2.29E-04
Days 8-14 Rain
0.148
3.23E-04
Continued on next page
106
Table B.1 - continued from previous page
Variable
KS-Statistic
P-Value
365 Day Pressure
0.147
3.91E-04
105 Day Pressure
0.146
3.96E-04
Days 8-14 Pressure
0.145
4.88E-04
Days 28-58 Pressure
0.140
8.60E-04
2 Day Max Temperature
0.139
9.67E-04
Days 1-7 Pressure
0.138
1.03E-03
3 Day Min Temperature
0.137
1.12E-03
Day of Max Temperature
0.137
1.15E-03
Population
0.136
1.30E-03
Day of Rain
0.133
1.71E-03
365 Day Rain
0.132
1.91E-03
Days 1-7 Max Temperature
0.131
2.08E-03
10 Day Max Temperature
0.129
2.71E-03
2 Day Min Temperature
0.128
2.93E-03
Number of Highways in 2 km
0.127
3.16E-03
14 Day Max Temperature
0.127
3.39E-03
Days 1-7 Min Temperature
0.126
3.60E-03
4 Day Min Temperature
0.126
3.61E-03
7 Day Max Temperature
0.124
4.40E-03
10 Day Min Temperature
0.121
6.06E-03
Number of Buildings in 2 km
0.120
6.47E-03
Days 22-28 Min Temperature
0.120
6.59E-03
Days 8-14 Mean Temperature
0.118
7.87E-03
Days 29-58 Rain
0.117
8.44E-03
7 Day Pressure
0.116
9.25E-03
14 Day Min Temperature
0.115
0.011
Continued on next page
107
Table B.1 - continued from previous page
KS-Statistic
P-Value
4 Day Pressure
0.114
0.011
Days 15-21 Max Temperature
0.113
0.012
120 Day Pressure
0.113
0.013
7 Day Min Temperature
0.112
0.014
Day of Min Temperature
0.109
0.017
30 Day Max Temperature
0.107
0.021
Days 8-14 Min Temperature
0.106
0.022
180 Day Mean Temperature
0.106
0.023
Days 1-7 Mean Temperature
0.103
0.028
180 Day Pressure
0.102
0.033
14 Day Mean Temperature
0.101
0.036
2 Day Mean Temperature
0.100
0.037
Length of Road in 2 km
0.097
0.047
30 Day Mean Temperature
0.096
0.050
7 Day Mean Temperature
0.096
0.051
150 Day Pressure
0.096
0.051
Days 15-21 Pressure
0.096
0.051
Days 22-28 Max Temperature
0.096
0.053
30 Day Min Temperature
0.095
0.054
Days 15-21 Min Temperature
0.095
0.056
10 Day Mean Temperature
0.095
0.057
Length of Highway in 2 km
0.094
0.058
180 Day Min Temperature
0.094
0.061
Days 8-14 Max Temperature
0.093
0.066
Distance to Nearest Road
0.092
0.067
3 Day Pressure
0.092
0.069
Variable
Continued on next page
108
Table B.1 - continued from previous page
Variable
KS-Statistic
P-Value
180 Day Max Temperature
0.089
0.088
2 Day Pressure
0.086
0.105
45 Day Min Temperature
0.085
0.117
Days 15-21 Mean Temperature
0.083
0.126
Day of Mean Temperature
0.083
0.128
3 Day Mean Temperature
0.083
0.131
45 Day Max Temperature
0.081
0.145
4 Day Mean Temperature
0.080
0.158
Number of Roads in 0.12 km
0.080
0.160
Number of Roads in 2 km
0.080
0.160
45 Day Mean Temperature
0.079
0.165
Mean Top 5% Gradient
0.079
0.172
120 Day Mean Temperature
0.078
0.174
105 Day Max Temperature
0.078
0.182
Days 29-58 Mean Temperature
0.077
0.184
90 Day Min Temperature
0.076
0.201
90 Day Mean Temperature
0.075
0.219
Days 29-58 Min Temperature
0.072
0.256
GDP
0.072
0.257
120 Day Max Temperature
0.071
0.264
105 Day Mean Temperature
0.071
0.267
150 Day Max Temperature
0.070
0.291
120 Day Min Temperature
0.069
0.303
Length of Road in 0.12 km
0.069
0.306
150 Day Mean Temperature
0.067
0.334
Length of Railroad in 2 km
0.067
0.336
Continued on next page
109
Table B.1 - continued from previous page
KS-Statistic
P-Value
90 Day Max Temperature
0.067
0.336
60 Day Max Temperature
0.067
0.339
105 Day Min Temperature
0.066
0.360
Days 29-58 Max Temperature
0.065
0.368
75 Day Max Temperature
0.063
0.415
60 Day Min Temperature
0.062
0.427
60 Day Mean Temperature
0.062
0.431
150 Day Min Temperature
0.061
0.440
75 Day Mean Temperature
0.061
0.454
Distance to Nearest Highway
0.060
0.461
Distance to Nearest Railroad
0.059
0.496
75 Day Min Temperature
0.058
0.522
Number of Buildings in 0.12 km
0.056
0.563
Day of Pressure
0.053
0.630
Number of Railoads in 2 km
0.029
0.996
Length of Railroad in 0.12 km
0.024
1.000
Length of Highway in 0.12 km
0.024
1.000
Number of Highways in 0.12 km
0.013
1.000
Number of Railoads in 0.12 km
0.007
1.000
Variable
B.O.5
Sensitivity analysis results, removing one variable at a
time.
110
Table B.2: KS-test results for all continuous variables
Variable
Mean Accuracy
P-Value of T-Test
No Variables Removed
0.6697
0
No Weather Variables
0.5523
1.04E-09
90 Day Pressure
0.6477
0.0354
2. Day Max Temperature
0.6488
0.0414
No Pressure Variables
0.6512
0.0462
Number of Roads in 2 km
0.6523
0.1276
No Rain Variables
0.6535
0.1145
150 Day Rain
0.6547
0.1085
105 Day Rain
0.6547
0.0748
Day of Pressure
0.6558
0.1559
120 Day Rain
0.6558
0.1433
120 Day Pressure
0.6558
0.2326
Day of Mean Temperature
0.6570
0.1246
180 Day Max Temperature
0.6570
0.1916
365 Day Pressure
0.6582
0.1952
2 Day Mean Temperature
0.6581
0.1800
Length of Railroad in 2 km
0.6593
0.3020
Days 29-58 Pressure
0.6593
0.2874
Days 15-21 Rain
0.6593
0.2874
2 Week Mean Temperature
0.6593
0.3020
2 Day Pressure
0.6593
0.2874
10 Day Rain
0.6593
0.3091
10 Day Max Temperature
0.6593
0.2948
Distance to Nearest Railroad
0.6605
0.3696
7 Day Rain
0.6605
0.3170
Continued on next page
111
Table B.2 - continued from previous page
Mean Accuracy
P-Value of T-Test
105 Day Pressure
0.6605
0.3556
Days 8-14 Min Temperature
0.6616
0.3507
Days 8-14 Max Temperature
0.6616
0.4599
2 Day Min Temperature
0.6616
0.4151
No Highway Variables
0.6628
0.4874
Mean Top 5% Gradient
0.6628
0.4514
Days 29-58 Min Temperature
0.6628
0.4266
Days 22-28 Min Temperature
0.6628
0.4434
Days 15-21 Pressure
0.6628
0.5232
Days 1-7 Max Temperature
0.6628
0.4807
90 Day Rain
0.6628
0.4514
75 Day Pressure
0.6628
0.5062
75 Day Min Temperature
0.6628
0.4266
60 Day Rain
0.6628
0.4434
365 Day Rain
0.6628
0.5336
365Day Mean Temperature
0.6628
0.4352
Population Density
0.6640
0.5703
Days 29-58 Rain
0.6640
0.5324
Days 22-28 Mean Temperature
0.6640
0.5524
Days 1-7 Mn Temperature
0.6640
0.5759
90 Day Min Temperature
0.6640
0.5524
4 Day Pressure
0.6640
0.5586
3 Day Pressure
0.6640
0.4845
150 Day Mean Temperature
0.6640
0.5393
Distance to Nearest Road
0.6651
0.6461
Days 15-21 Mean Temperature
0.6651
0.6509
Variable
Continued on next page
112
Table B.2 - continued from previous page
Variable
Mean Accuracy
P-Value of T-Test
45 Day Mean Temperature
0.6651
0.6247
180 Day Pressure
0.6651
0.6461
150 Day Min Temperature
0.6651
0.6358
105 Day Min Temperature
0.6651
0.6411
Number of Roads in 0.12 km
0.6663
0.6998
Days 22-28 Min Temperature
0.6663
0.7548
90 Day Max Temperature
0.6663
0.6767
75 Day Mean Temperature
0.6663
0.7189
45 Day Max Temperature
0.6663
0.7548
4 Day Max Temperature
0.6663
0.7231
120 Day Max Temperature
0.6663
0.6944
Number of Railroads in 0.12 km
0.6674
0.7974
Land Cover
0.6674
0.8075
Length of Road in 0.12 km
0.6674
0.8241
Length of Highway in 2 km
0.6674
0.8043
Days 8-14 Pressure
0.6674
0.8009
Days 8-14 Mean Temperature
0.6674
0.7856
Days 29-58 Mean Temperature
0.6674
0.7974
Days. 1-7 Mean Temperature
0.6674
0.8106
30 Day Min Temperature
0.6674
0.7898
3 Day Rain
0.6674
0.786
2 Week Min Temperature
0.6674
0.8164
10 Day Min Temperature
0.6674
0.8164
Day of Min Temperature
0.6686
0.9090
Day of Max Temperature
0.6686
0.9103
7 Day Pressure
0.6686
0.8997
Continued on next page
113
Table B.2 - continued from previous page
Mean Accuracy
P-Value of T-Test
45 Day Rain
0.6686
0.9115
45 Day Pressure
0.6686
0.8997
4 Day Mean Temperature
0.6686
0.9161
30 Day Rain
0.6686
0.8960
2 Day Rain
0.6686
0.9345
150 Day Max Temperature
0.6686
0.9115
10 Day Mean Temperature
0.6686
0.8918
Number of Railroads in 2 km
0.6698
1
No Mean Temperature Variables
0.6698
1
Days 22-28 Pressure
0.6698
1
Days 1-7 Pressure
0.6698
1
90 Day Mean Temperature
0.6698
1
75 Day Rain
0.6698
1
60 Day Min Temperature
0.6698
1
3 Day Min Temperature
0.6698
1
10 Day Pressure
0.6698
1
Number of Highways in 0.12 km
0.6709
0.8993
Number of Buildings in 2 km
0.6709
0.8975
Number of Buildings in 0.12 km
0.6709
0.8914
No Min Temperature Variables
0.6709
0.8914
75 Day Max Temperature
0.6709
0.9100
7 Day Mean Temperature
0.6709
0.9190
60 Day Pressure
0.6709
0.8956
30 Day Pressure
0.6709
0.9125
30 Day Max Temperature
0.6709
0.8891
3 Day Mean Temperature
0.6709
0.9073
Variable
Continued on next page
114
Table B.2 - continued from previous page
Variable
Mean Accuracy
P-Value of T-Test
150 Day Pressure
0.6709
0.8975
No Road Variables
0.6721
0.8124
Distance to Nearest Highway
0.6721
0.8030
Days 22-28 Rain
0.6721
0.821
4 Day Min Temperature
0.6721
0.8094
180 Day Rain
0.6721
0.7922
No Railroad Variables
0.6733
0.7499
No Max Temperature Variables
0.6733
0.7162
Days 29-58 Max Temperature
0.6733
0.6662
Days 15-21 Max Temperature
0.6733
0.6966
365 Day Min Temperature
0.6733
0.7116
180 Day Min Temperature
0.6733
0.6966
105 Day Mean Temperature
0.6733
0.7018
60 Day Mean Temperature
0.6744
0.6259
105 Day Max Temperature
0.6744
0.6008
7 Day Min Temperature
0.6756
0.5460
14 Day Max Temperature
0.6756
0.5324
120 Day Min Temperature
0.6756
0.5324
14 Day Rain
0.6767
0.4069
Length of Highway in 0.12 km
0.6779
0.4328
45 Day Min Temperature
0.6779
0.3733
30 Day Mean Temperature
0.6779
0.4049
14 Day Pressure
0.6779
0.4688
Number of Highways in 2 km
0.6791
0.2950
No Buildings
0.6791
0.4039
Length od Railroad in 0.12 km
0.6791
0.3283
Continued on next page
115
Table B.2 - continued from previous page
Mean Accuracy
P-Value of T-Test
Days 15-21 Min Temperature
0.6791
0.2950
60 Day Max Temperature
0.6791
0.2863
4 Day Rain
0.6791
0.3855
180 Day Mean Temperature
0.6802
0.2658
120 Day Mean Temperature
0.6814
0.2472
GDP
0.6826
0.2714
Days 8-14 Rain
0.6826
0.1625
Day of Rain
0.6826
0.2423
7 Day Max Temperature
0.6826
0.1695
Length of Road in 2 km
0.6837
0.1660
3 Day Max Temperature
0.6837
0.1051
Days 1-7 Rain
0.6907
0.0346
365 day Max Temperature
0.6919
0.0158
No Anthropogenic Variables
0.6942
0.0157
No Temperature Variables
0.7081
0.0006
Variable
B.O.6
Sensitivity analysis results, removing all of one type of
variable, and adding in one variable individually.
116
Variable
Days 8-14 Rain
14 Day Rain
2 Day Rain
150 Day Rain
90 Day Rain
7 Day Rain
4 Day Rain
Days 1-7 Rain
60 Day Rain
Days 15-21 Rain
75 Day Rain
120 Day Rain
10 Day Rain
105 Day Rain
3 Day Rain
Days 29-58 Rain
45 Day Rain
180 Day Rain
Days 22-28 Rain
Day of Rain
365 Day Rain
30 Day Rain
Mean Accuracy
0.6256
0.6419
0.6419
0.6465
0.6477
0.6488
0.6500
0.6512
0.6512
0.6523
0.6523
0.6523
0.6535
0.6558
0.6570
0.6581
0.6593
0.6593
0.6616
0.6628
0.6628
0.6733
P-Value of T-Test
0.0004
0.0109
0.0075
0.0176
0.0245
0.0252
0.0301
0.0872
0.0791
0.0651
0.0576
0.0954
0.1044
0.1371
0.2435
0.2400
0.3419
0.3655
0.3229
0.4352
0.4737
0.7434
Table B.3: Sensitivity Analysis with only one rain variable included.
117
Variable
30 Day Min Temperature
10 Day Min Temperature
Days 1-7 Min Temperature
180 Day Min Temperature
90 Day Min Temperature
3 Day Min Temperature
75 Day Min Temperature
105 Day Min Temperature
2 Day Min Temperature
150 Day Min Temperature
60. Day Min Temperature
120. Day Min Temperature
Days 22-28 Min Temperature
7 Day Min Temperature
Day 8-14 Min Temperature
Days 29-58 Min Temperature
Day of Min Temperature
4 Day Min Temperature
365 Day Min Temperature
14 Day Min Temperature
Days 15-21 Min Temperature
45 Day Min Temperature
Mean Accuracy
0.6663
0.6663
0.6674
0.6674
0.6686
0.6686
0.6709
0.6721
0.6733
0.6733
0.6744
0.6744
0.6756
0.6756
0.6767
0.6767
0.6779
0.6779
0.6791
0.6837
0.6849
0.6884
P-Value of T-Test
0.7272
0.6888
0.8043
0.8428
0.8939
0.8979
0.9027
0.8030
0.69108
0.7116
0.6471
0.6200
0.5098
0.4933
0.4335
0.4249
0.4122
0.4393
0.3120
0.1163
0.1332
0.0627
Table B.4: Sensitivity Analysis with only one min temperature variable included.
118
Variable
Days 15-21 Max Temperature
105 Day Max Temperature
Days 8-14 Max Temperature
7. Day Max Temperature
60 Day Max Temperature
4 Day Max Temperature
180 Day Max Temperature
10 Day Max Temperature
75 Day Max Temperature
365 Day Max Temperature
3 Day Max Temperature
30 Day Max Temperature
2Day Max Temperature
Days 22-28 Max Temperature
150. Day Max Temperature
Day of Max Temperature
90 Day Max Temperature
45 Day Max Temperature
120 Day Max Temperature
14 Day Max Temperature
Days 29-58 Max Temperature
Days 1-7 Max Temperature
Mean Accuracy
0.6628
0.6651
0.6674
0.6674
0.6674
0.6698
0.6698
0.6698
0.6709
0.6709
0.6733
0.6744
0.6744
0.6767
0.6767
0.6791
0.6791
0.6791
0.6791
0.6802
0.6826
0.6826
P-Value of T-Test
0.4514
0.5924
0.7937
0.7719
0.7898
1
1
1
0.8815
0.8914
0.7643
0.6075
0.6315
0.4861
0.4160
0.3438
0.3655
0.3655
0.3120
0.2736
0.1488
0.2105
Table B.5: Sensitivity Analysis with only one max temperature variable included.
119
Variable
30 Day Min Temperature
10 Day Min Temperature
Days 1-7 Min Temperature
180 Day Min Temperature
90 Day Min Temperature
3 Day Min Temperature
75 Day Min Temperature
105 Day Min Temperature
2 Day Min Temperature
150 Day Min Temperature
60 Day Min Temperature
120 Day Min Temperature
Days 22-28 Min Temperature
7 Day Min Temperature
Days 8-14 Min Temperature
Days 29-58 Min Temperature
Day of Min Temperature
4 Day Min Temperature
365 Day Min Temperature
14 Day Min Temperature
Days 15-21 Min Temperature
45 Day Min Temperature
Mean Accuracy
0.6663
0.6663
0.6674
0.6674
0.6686
0.6686
0.6709
0.6721
0.6733
0.6733
0.6744
0.6744
0.6756
0.6756
0.6767
0.6767
0.6779
0.6779
0.6791
0.6837
0.6849
0.6884
P-Value of T-Test
0.7272
0.6888
0.8043
0.8428
0.8939
0.8979
0.9027
0.8030
0.6911
0.7116
0.6471
0.6200
0.5098
0.4933
0.4335
0.4249
0.4122
0.4393
0.3120
0.1163
0.1332
0.0627
Table B.6: Sensitivity Analysis with only one mean temperature variable included.
120
Variable
2 Day Pressure
Days 8-14 Pressure
Day of Pressure
14 Day Pressure
10 Day Pressure
Days 29-58 Pressure
7 Day Pressure
180 Day Pressure
3 Day Pressure
Days 22-28 Pressure
4 Day Pressure
30 Day Pressure
150 Day Pressure
105 Day Pressure
75 Day Pressure
Days 15-21 Pressure
Days 1-7 Pressure
365 Day Pressure
45 Day Pressure
60 Day Pressure
90 Day PRessure
120 Day PRessure
Mean Accuracy
0.6326
0.6337
0.6372
0.6384
0.6395
0.6407
0.6407
0.6419
0.6430
0.6442
0.6477
0.6477
0.6500
0.6500
0.6512
0.6523
0.6523
0.6535
0.6547
0.6570
0.6640
0.6802
P-Value of T-Test
0.0072
0.0011
0.0023
0.0065
0.0034
0.0116
0.0137
0.0069
0.0258
0.0267
0.0265
0.0265
0.0722
0.0832
0.0597
0.0651
0.1138
0.1838
0.0978
0.1639
0.5586
0.2332
Table B.7: Sensitivity Analysis with only one pressure variable included.
121
122
Bibliography
[1] Alexander, D. "Urban landslides." Progress in Physical Geography 13.2 (1989):
157-189.
[2] Alexander, D. "Vulnerability to Landslides." Landslide Hazard and Risk. Wiley,
Chichester (2005): 175-198.
[3] Alexander, L. V., et al. "Global observed changes in daily climate extremes of
temperature and precipitation." Journal of Geophysical Research: Atmospheres
111.D5 (2006): 1984-2012.
[4] Batista, G.E., Prati, R.C., and Monard, M.C. "A study of the behavior of
several methods for balancing machine learning training data." ACM Sigkdd
Explorations 6.1 (2004): 20-29.
[5] Berman, M. "Active Search Through Washington Landslide Debris Ends."
Washington Post 29 April 2014: n. pag.
[6] Bird, S., Klein, E., and Loper, E. Natural language processing with Python.
O'Reilly Media, Inc.", 2009.
[7] Birkmann, J. "Risk and vulnerability indicators at different scales: applicability,
usefulness, and policy implications." Environmental Hazards 7.1 (2007): 20-31.
[8] Bossard, M., Feranec, J., and Otahel, J. European Environment Agency
(EEA)."CORINE land cover technical guide: Addendum 2000." (2000).
[9] Breiman, L. "Random forests." Machine learning 45.1 (2001): 5-32.
123
[10] Brenning, A. "Spatial Prediction Models for Landslide Hazards:
Review,
Comparison and Evaluation." Natural Hazards and Earth System Sciences, 5
(2005):853-862.
[11] Carrara, A., et al. "Use of GIS technology in the prediction and monitoring of
landslide hazard." Natural Hazards 20.2-3 (1999): 117-135
[121 Chau, K.T. et al. "Landslide hazard analysis for Hong Kong using landslide
inventory and GIS." Computers and Geosciences 30.4 (2004): 429-443.
[13] Chawla, N. V., et al. "SMOTE: Synthetic Minority Over-sampling Technique."
Journal of Artificial Intelligence Research 16 (2002): 321-357.
[14]
Chawla, N.V. "Data mining for imbalanced datasets: An overview." Data mining and knowledge discovery handbook Springer US, (2005): 853-867.
[151 Chung, C.F., and Fabbri, A.G. "Validation of spatial prediction models for
landslide hazard mapping." Natural Hazards 30.3(2003): 451-472.
[16] Center for International Earth Science Information Network
(CIESIN),
Columbia University, United Nations Food and Agricultural Program (FAO),
and Centro Internacional de Agricultura Tropical - CIAT. Gridded Population
of the World, Version 3 (GPWv3): Population Density Grid. Palisades, NY
(2005): NASA Socioeconomic Data and Applications Center (SEDAC).
[17] Collison, A., et al. "Modelling the impact of predicted climate change on
landslide frequency and magnitude in SE England." Engineering Geology 55.3
(2000): 205-218.
[181 Crozier, M.J. "Deciphering the Effect of Climate Change on Landslide Activity:
A Review." Geomorphology,124 (2010): 260-267.
[19] Cruden, D. M., and Varnes, D. J. "Landslides: Investigation and Mitigation.
Chapter 3-Landslide types and processes." Transportation research board special report 247 (1996).
124
[20] Dai, A. "Precipitation Characteristics in Eighteen Coupled Climate Models."
Journal of Climate,19.18 (2006):4605-4630.
[21] Dai, F.C., Lee, C.F., and Ngai, Y.Y. "Landslide risk assessment and management: an overview." Engineering Geology 64.1 (2001): 65-87.
[22] Dal Pozzolo, A., Caelen, 0., and Bontempi, G. unbalanced: The package implements differentdata-driven method for unbalanced datasets. R packageversion
1.1: 2014. http://CRAN.R-project.org/package=unbalanced.
[23] Dale, V. H., et al. "Climate Change and Forest Disturbances: Climate change
can affect forests by altering the frequency, intensity, duration, and timing of
fire, drought, introduced species, insect and pathogen outbreaks, hurricanes,
windstorms, ice storms, or landslides." BioScience 51.9 (2001): 723-734.
[24] Swiss .Federal Statistics (FSO). Gross domestic product by major region and
canton. OFS 1328-1300 Neuchatel, Switzerland: FSO, 2013.
[251 Gao, X., et al. "An Analogue Approach to Identify heavy Precipitation Events:
Evaluation and Application to CMIP5 Climate Models in the United States."
Journal of Climate 27 (2014): 5941D5963.
[26] Guyon, I. and Eliseeff, A. "An Introduction to variable and feature selection."
The Journal of Machine LEarning REsearch 3 (2003): 1157-1182.
[27] Hastie, T., et al. The elements of statistical learning. Vol. 2. No. 1. New York:
Springer, 2009.
[28] Haylock, M.R., Klein Tank, A.M.G., Klok, E.J., Jones, P.D., and New, M.
"A European daily high-resolution gridded dataset of surface temperature and
precipitation." J. Geophys. Res (Atmospheres) 113(2008)
[29] Hilker, N., Badoux, A., and Hegg, C."The Swiss flood and landslide damage
database 1972-2007." Nat. Hazards Earth Syst. Sci 9 (2009): 913-925.
125
[30] Homer, C., et al. "Completion of the 2001 National Land Cover Database for
the Counterminous United States." PhotogrammetricEngineering and Remote
Sensing 73.4 (2007): 337.
[31] Iverson, R.M. "Landslide triggering by rain infiltration." Water Resources Research 36.7 (2000): 1897-1910.
[32] Kamath, N. "1.25L slumdwellers living in landslide-prone areas in Mumbai."
Hindustan Times 2 July 2013: n.pag.
[33] Kellenberg, D.K., and Mobarak, A.M. "Does rising income increase or decrease
damage risk from natural disasters?." Journal of Urban Economics 63.3 (2008):
788-802.
[34] Kotsiantis, S., Kanellopoulos, D., and Pintelas, P. "Handling imbalanced
datasets: A review." GESTS International Transactions on Computer Science
and Engineering 30.1 (2006): 25-36.
[35]
Kotsiantis, S.B., Zaharakis, I.D., and Pintelas, P.E. "Supervised machine learning: A review of classification techniques." Informatica 31 (2007): 249-268.
[361 Liu, X., Wu, J., and Zhou, Z. "Exploratory undersampline for class-imbalance
learning." IEEE Transactions of Systems, Man, and Cybernetics-PartB: Cybernetics 39.2 (2009): 539-550.
[37] Matsuura, S., Asano, S. and Okamoto, T. "Relationship between rain and/or
meltwater, pore-water pressure and displacement of a reactivated landslide."
Engineering Geology 101.1 (2008): 49-59.
[38] Mitchell, Tom M. Machine learning Burr Ridge, IL: McGraw Hill 45 (1997).
[39] Petley, D.N. "The Global Occurrence of Fatal Landslides in 2007." European
Geosciences Union General Assembly, Vienna, 13-18 April 2008. Geophysical
Research Abstracts, 2008. n.pag.
126
[40] Petrucci, 0., Pasqua, A. A., and GuliL, G. "Landslide damage assessment using
the Support Analysis Framework (SAF): the 2009 landsliding event in Calabria
(Italy)." Advances in Geosciences 26.26 (2010): 13-17.
[41] Rice, R.M. "Social, technological, and research responses to potential erosion
and sediments disasters in the western United States, with examples from California." Proceedins of the InternationalSymposium on Erosion, Debris Flow
and Disaster Prevention, Tskuba, Japan, 3-5 September 1985. p. 1-10.
[42] Rienecker, M.M., et al. "MERRA: NASA's modern-era retrospective analysis
for research and applications." Journal of Climate, 24.14 (2011): 3624-3648.
[43] Safavian, S.R., and Landgrebe, D. "A survey of decision tree classifier methodology." IEEE transactionson systems, man, and cybernetics 21.3 (1991): 660-674.
[44] Shuster, R.L. and Highland, L.M. "The Third Hans Cloos Lecture: Urban landslides: socioeconomic impacts and overview of mitigative strategies." Bulletin
of Engineering Geology and the Environment 66.1 (2007): 1-27.
[45] Simpson, R.H., and Saffir, H. "The hurricane disaster potential scale." Weatherwise 27.8 (1974): 169.
[46] Spiker,E.C., and Gori, P. National Landslide Hazards Mitigation Strategy, a
Framework for Loss Reduction. No. 1244. US Geological Survey, 2003.
[47] Solomon, et al., Editors. Climate Change 2007 -
The physical science basis:
Contribution of Working Group I to the Fourth Assessment Report of the Intergovernmental Panel on Climate Change. Vol. 4. Cambridge (UK): Cambridge
University Press; 2007. 966 p. Supported by the Intergovernmental Panel on
Climate Change.
[481 van den Besselaar, E.J.M., Hayock, M.R., van der Schrier, G., and Klein Tank,
A.M.G. "A European daily high-resolution observational gridded data set of sea
level pressure." J. Geophys. Res., 116 (2011).
127
[49] van Westen, C.J., van Asch, T.W.J., and Soeters, R. "Landslide Hazard and
Risk Zonation - Why is it Still so Difficult?" Bulletin of Engineering Geology
and the Environment, 65.2 (2006): 167-184.
[501 van Westen, C.J., Catellanos, E., and Kuriakose, S.L. "Spatial Data for Landslide Susceptibility, Hazard, and Vulnerability Assessment: An Overview." Engineering Geology 102.3 (2008):112-131.
[51] Varnes, D.J. "Landslides Hazard Zonation: A Review of Principles and Practice." Natural Hazards 3 (1984).
[521 Witten, I. H., and Frank, E. Data Mining: Practicalmachine learningtools and
techniques. Morgan Kaufmann, 2005.
[53] Wood, H. 0., and Neumann, F. "Modified Mercalli intensity scale of 1931."
Bulletin of the Seismological Society of America 21.4 (1931): 277-283.
[54] Yao, X. Tam, L.G., and Dai, F.C. "Landslide Susceptibility Mapping Based
on Support Vector Machine: A Case Study on Natural Slopes of Hong Kong,
China," Geomorphology 101.4 (2008): 572-582.
128