Jordan Bramble Harold Merida Ibtsam Khan
advertisement

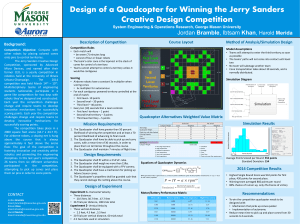
Jordan Bramble Harold Merida Ibtsam Khan Sponsor: Bo Pollett 1 • • • • • • • • • Description of Competition Competition Rules Experiment Strategy Analysis Mission Requirements Functional Requirements Design Requirements Simulation Design Project Plan 2 ● ● ● ● ● When: March 14-15, 2014 Stage: 2000 sq. ft. arena, 6 ft. ceiling 26 teams in 2013, only one airborne. Consists of placing colored cones onto pins to control territories. points awarded based on time. Cones are located behind a hinged door. 3 Hinged Container for Cones 4 36 First Level Territories ------------ 8 Second Level Territories ------------ 1 Third Level Territory 5 • • • • • • • • • Description of Competition Competition Rules Experiment Strategy Analysis Mission Requirements Functional Requirements Design Requirements Simulation Design Project Plan 6 • Each match will be seven (7) minutes long • Each match will consist of four or fewer robots • The team’s color cone is the topmost in the stack of cones for control of a territory • Teams cannot attempt to control a territory unless it would be contiguous • Cones will be placed behind hinged doors which must be opened before cones can be accessed. • The first time a team’s door is opened will result in ten (10) points 7 • Airborne robots have a constant 3x multiplier when scoring cones • For each contiguous powered territory on the first level controlled at the end of the match, a team will be awarded ten (10) points • For each contiguous powered territory on the second level controlled at the end of the match, a team will be awarded thirty (30) points • For each contiguous powered territory on the third level controlled at the end of the match, a team will be awarded forty (40) points • Every ten (10) seconds that a team controls a first level territory will result in one (1) point • Every ten (10) seconds that a team controls a second level territory will result in three (3) points • Every ten (10) seconds that a team controls a third level territory will result in five (5) points • Completion of an action for the first time will result in ten (10) points being 8 awarded to the team responsible. • 3x point multiplier • Higher velocity than ground vehicles • Less obstacles for airborne vehicles • Faster access to territories without having to access ramps 9 • • • • • • • • • Description of Competition Competition Rules Experiment Strategy Analysis Mission Requirements Functional Requirements Design Requirements Simulation Design Project Plan 10 • Three distances • 20.5 feet, 30.7 feet , 47.7 feet • 19 Trials per distance • 57 trials total 11 19 Trials were performed to determine the average velocity of a quadcopter for the given distances 12 13 14 15 • Three vertical distances • 2.5 feet, 4.5 feet , 5.5 feet • 5 Trials per vertical distance • 15 trials total • Laser used to determine height. 16 17 18 19 20 • Three height • 2.5 feet, 4.0 feet , 5.5 feet • 8 Trials per height • 24 trials total 21 22 23 24 25 • • • • • • • • • Description of Competition Competition Rules Experiment Strategy Analysis Mission Requirements Functional Requirements Design Requirements Simulation Design Project Plan 26 • Mean Velocity of 3.91 ft/sec • Mean ascending velocity for 4.5 ft. of 1.14 ft/sec • Assumption: it takes 15 seconds to pick up and drop a cone • Time to acquire a territory : • t = 2d/3.91+ 2*4.5/1.14 +15 • d = distance from home territory to pin. • Need 7 contiguous territories to control 3rd level. • Controlling 3rd level takes 266.2 seconds • Mean time to control territory is 33.3 sec. • 420 seconds in a match. • Expected # of cones: 12 27 28 29 30 31 32 • • • • • • • • F = number of times 1st level territory is controlled for 10 sec. S = number of times 2nd level territory is controlled for 10 sec T = number of times 3rd level territory is controlled for 10 sec X = number of contiguous 1st level territories controlled at end Y = number of contiguous 2nd level territories controlled at end Z = number of contiguous 3rd level territories controlled at end Also add 30 pts for the first time the hinged door is opened Pts. = 3F + 9S + 15T + 30x + 90Y + 120Z + 30 33 constraints • • • • F≥5 S≥1 F + S + T ≤ 12 X + Y + Z ≤ 12 • Analyzing this strategy with no competition, and no user error, yields 1908 pts. 34 • • • • • • • • • Description of Competition Competition Rules Experiment Strategy Analysis Mission Requirements Functional Requirements Design Requirements Simulation Design Project Plan 35 • The Quadcopter shall compete in the Jerry Sanders Creative Design Competition. • The Quadcopter system shall be capable of averaging 480 points in competition. A strategic support tool shall be developed to determine and verify optimal strategies for achieving these numbers. • The Quadcopter shall have a mechanism to pick up and carry cones, in order to place them on another place in the course. 36 • • • • • • • • • Description of Competition Competition Rules Experiment Strategy Analysis Mission Requirements Functional Requirements Design Requirements Simulation Design Project Plan 37 • The Quadcopter shall be able to remain in flight for at least 7 minutes at a time. A 3 minute buffer is desirable. • The Quadcopter shall lift the cone to a sufficient height, at least 6 feet above the ground. • The Quadcopter shall place cones on a 1 inch diameter 8 inch long pin. • The Quadcopter shall be ably to safely navigate a 44’ X 44’ arena. • The Quadcopter shall have a carrying capacity of at least 1kg, for a camera, cone acquisition mechanism, and cone. 38 • • • • • • • • • Description of Competition Competition Rules Experiment Strategy Analysis Mission Requirements Functional Requirements Design Requirements Simulation Design Project Plan 39 • • • • The Quadcopter shall fit within a 3’x3’x3’ cube. The Quadcopter shall weigh no more than 25lbs. The Quadcopter shall be equipped with a FPV camera. The Quadcopter shall have a mechanism for picking up Adams Saucer cones with a 2’’ diameter central hole and 2’’ height. • The Quadcopter’s propellers shall be guarded such that they cannot damage the netting above the course. • The Quadcopter shall be equipped with a mechanism for concentrating the thrust such that it will not blow cones away when attempting to pick them up. 40 APM AutoPilot 3DR Power Module Magnometer Telemetry Set 20 Amp ESC Video Transmitter Motors x 4 Propellers x 4 Frame 3’ X 3’ Landing Gear Batteries FPV Camera/laptop RC Transmitter 41 42 Category Weight X Score = Final Score Category Weight (0-5): Score (0-5): Final Score (0 -150): 43 Part Name Motors APM 2.6 Autopilot Cost $96 $159 3DR Xt60 Battery Adapter $99 Propellers $31 Magnemeter $89 Frame $99 Telemetry Set $86 20 Amp ESCs $104 DX8 Radio Control $429 FPV Camera + Transmitter $249 Batteries $138 Replacement Kit $114 44 • Hooks that can be inserted into the center of the cone. • Clamps that can hold the center edge of the cone • Claw that uses friction to hold the outer surface of the cone 45 46 • • • • • • • • • Description of Competition Competition Rules Experiment Strategy Analysis Mission Requirements Functional Requirements Design Requirements Simulation Design Project Plan 47 • Each feasible strategy obtains at least 480 points and requires at most the number of expected cones that can be picked up. • Each strategy contains sub-strategies that are composed of the order of the possible decisions that will be made to attain a given amount of pts. • Once all strategies and sub-strategies are determined they must be compared in competition 48 • Inputs : Velocity Distributions, user error, agility and stability, precision • All strategies are compared in match simulation • A strategy is not rendered obsolete until all substrategies are obsolete • Outputs: points scored, cones required, degree of immunity to opponents choices • Strategy alternatives will be ranked with a value function 49 50 • • • • • • • • • Description of Competition Competition Rules Experiment Strategy Analysis Mission Requirements Functional Requirements Design Requirements Simulation Design Project Plan 51 52 53 o $55.00/hr with an overhead rate of $110.00/hr o Total Costs = Parts + Labor + Conference Costs o Conference: Hotel, Transportation of Copter and transportation of participants o Total Cost o Best Case: ~ $113,000 o Medium Case: ~ $125,000 o Worst Case: ~ $136,000 54 55 56 Risk Mitigation Damage during testing 3D print parts for low level test configuration Adequate practice Purchase spare parts Budget for spare parts Adequate practice time Transport quadcopter using a reliable carrier Drive to competition and ensure delivery of Damage during competition Damage during transportation of quadcopter quadcopter Incorrect simulation assumptions are made Ensure assumptions used in the model are valid by analyzing prior competition results Involve as many of the stakeholders as possible. 57 Operator error Computer Error (if autonomous route is pursued) Ensure enough practice occurs Practice with a small scale quadcopter Select the best operator Ensure to the best of ability that no error is made Create operational scenarios to ensure that all scenarios are considered. Hardware Failure at any time Going Over Budget Time Constraint Loss of essential Quadcopter Parts Revert back to manual control Extensive testing Purchase extra parts Ensure adequate practice time Perform adequate analysis Follow CPI and SPI charts Start earlier Work efficiently Actively monitor project schedule Keep an active inventory of all active parts Purchase of additional parts 58 59 60