Spinors on the light front Yang Li
advertisement

Spinors on the light front
Yang Li∗
Department of Physics and Astronomy, Iowa State University, Ames, IA, 50011,
March 6, 2016
These notes define a set of conventions in light-front quantum field theory. Similar conventions for
light-front dynamics, can be found in, e.g.,
• A. Harindranath: Light front QCD: lecture notes (2005);
• M. Burkardt: Light Front Quantization, Adv. Nucl. Phys. 23, 1 (2002) [arXiv:hep-ph/9505259];
• G. P. Lepage, S. J. Brodsky, Exclusive processes in perturbative quantum chromodynamics, Phys.
Rev. D 22, 2157 (1980);
• S. J. Brodsky, H.-C. Pauli , S. S. Pinsky: Quantum chromodynamics and other field theories on
the light cone, Phys. Rep. 301, 299 (1998);
• J. Carbonell , B. Desplanques , V. A. Karmanov and J.-F. Mathiot: Phys. Rep. 300, 215 (1998).
Throughout the notes, we use natural units, ~ = c = 1. Let x = (x0 , x1 , x2 , x3 ) = (t, x) be the standard
space-time coordinates. The signature of Minkowski space metric tensor is gµν = diag{+1, −1, −1, −1}.
1 Light-Front coordinates
The light-front coordinates are defined as (x+ , x− , x1 , x2 ), where x+ = x0 +x3 is the light-front time, x− =
x0 − x3 is the longitudinal coordinate, x⊥ = (x1 , x2 ) are the transverse coordinates. The corresponding
metric tensor and its inverse is,
1
2
2
1
2
2
µν
,
gµν =
g
=
(1)
−1
−1
−1
−1
Note that
√
εµνρσ
− det g = 21 . The Levi-Civita tensor should be defined as
!
+2 if µ, ν, ρ, σ is an even permutation of −, +, 1, 2
µ ν ρ σ
1
=√
=
−2 if µ, ν, ρ, σ is an odd permutation of −, +, 1, 2
− det g − + 1 2
0
other cases.
(2)
Similarly, the light-front components of a 4-vector v = (v 0 , v) is (v + , v − , v ⊥ ), where v ± = v 0 ± v 3 and
v = (v 1 , v 2 ). Sometimes it is also useful to introduce the complex representation for the transverse
vector v ⊥ : v L = v 1 − iv 2 , and v R = v 1 + iv 2 = (v L )∗ . The component of the contravariant 4-vector
vµ = gµν v ν are: (v− , v+ , v⊥ ), where v± = 21 (v0 ± v3 ) = 12 v ∓ , v⊥ = −v ⊥ .
⊥
∗ Email:leeyoung@iastate.edu
1
It is useful to introduce two vectors to symbolically restore the covariance: ω = (ω 0 , ω) = (1, 0, 0, −1),
and η = (η 0 , η) = (0, 1, 0, 0). They satisfy
ωµ ω µ = 0, ηµ η µ = −1, ηµ ω µ = 0,
(ω 2 = η 2 = 1).
(3)
Then, the longitudinal coordinate of a vector a can be written as a+ = ω · a. Similarly, the transverse
component of it becomes a⊥ = a − ω(ω · a).
2 Normalization
The coordinate space integration measure is defined as
Z
Z
Z
1
dx− d2 x⊥ .
d3 x ≡ dx+ d2 x⊥ =
2
(4)
The full four-dimensional integration measure is,
Z
Z
Z
Z
1
dx+ dx− d2 x⊥ = d3 x dx+ .
d4 x = dx0 dx1 dx2 dx3 =
2
(5)
In the momentum space, we use the Lorentz invariant integration measure:
d4 p
θ(p+ )2πδ(p2 − m2 ) =
(2π)4
Z
Z
d3 p
θ(p0 ) =
(2π)3 2p0
d2 p⊥ dp+
θ(p+ ) =
(2π)3 2p+
Z
Z
d2 p⊥
(2π)3
Z1
dx
2x
(6)
0
p
where p0 = p2 + m2 is the on-shell energy and x = p+ /P + is the longitudinal momentum fraction.
The corresponding normalization of the single-particle state is
hp, σ|p0 , σ 0 i = 2p0 θ(p0 )(2π)3 δ 3 (p − p0 )δσσ0 = (2π)3 δ 4 (p − p0 )/θ(p0 )δ(p2 − m2 )
= 2p+ θ(p+ )(2π)3 δ 3 (p − p0 )δσσ0 = 2x(2π)3 δ(x − x0 )δ 2 (p⊥ − p0⊥ )δσσ0 . (7)
Here the light-front delta function is defined as δ 3 (p) = δ 2 (p⊥ )δ(p+ ).
The transverse Fourier transformation and its inverse transformation are defined as,
Z 2
Z
d p⊥ ip⊥ ·r⊥
e
fe(r⊥ ) ≡
f
(p
),
f
(p
)
≡
d2 r⊥ e−ip⊥ ·r⊥ fe(r⊥ ).
⊥
⊥
(2π)2
(8)
2.1 Box regularization
In a typical box normalization, the system is confined in a box with length L:
− L2 ≤ x ≤ + L2 .
(9)
Here x is the coordinate of any one spatial dimension. Boundary conditions, such as periodic boundary
condition or anti-periodic boundary condition, may apply. The conjugate moment is discretized. In the
case of the periodic boundary condition, it becomes, p = 2πn/L, (n = 0, ±1, ±2, · · · ). The conversion of
the integrations and δ-functions are listed in Table 1. For example,
+∞
Z
−i(p−p0 )x
dx e
−∞
Z
+∞
−∞
0
=2πδ(p − p ),
dp ip(x−x0 )
e
=δ(x − x0 ),
2π
Z
+ 21 L
0
dx e−i(p−p )x = Lδp,p0 .
− 12 L
1 X ip(x−x0 )
e
= δ(x − x0 ).
L p
(10)
In light-front dynamics, the spectral condition requires that the longitudinal momentum is always
positive. The box regularization of the longitudinal momentum can be implemented using the same
2
Table 1: Conversion formula for the box regularization.
L→∞
−→
box regularization
Z +1L
2
dx
continuum
Z +∞
dx
−∞
Z +∞
dp
2π
−∞
− 12 L
1
L
L→∞
X
−→
p
δ(x − x0 )
δ(x − x0 )
2πδ(p − p0 )
Lδp,p0
method above but with an addition Heaviside θ-function to impose the positivity of the longitudinal
momentum: θ(p+ ). Note also that the longitudinal momentum is conjugate to x+ = 21 x− . For example,
1
2
Z
Z
+∞
i
dx− e− 2 (p
−∞
+∞
+
−∞
+
−p0+ )x−
=2πδ(p+ − p0+ ),
−
0−
i +
dp
θ(p+ )e 2 p (x −x ) =2δ(x− − x0− ),
2π
1
2
Z
+L
i
dx− e− 2 (p
+
−p0+ )x
= Lδp+ ,p0+ .
−L
−
0−
1X
i +
θ(p+ )e 2 p (x −x ) = 2δ(x− − x0− ).
L +
(11)
p
2.2 Longitudinal propagators
1
f (x− ) ≡
∂+
Z
+∞
−∞
dy − θ(x− − y − ) − θ(y − − x− ) f (y − ).
(12)
This propagator is the inverse of the derivative operator and satisfies the anti-periodic boundary condition
in the longitudinal direction:
1
1
1
+
−
−
∂
f (x ) = f (x ),
f (−∞) = −
f (+∞).
(13)
∂+
∂+
∂+
1
(∂ + )
−
f (x ) ≡
2
Z
+∞
−∞
dy − x− − y − f (y − ).
(14)
This propagator is the inverse of the double-derivative operator and satisfies the anti-periodic boundary
condition in the longitudinal direction:
2
1
1
1
−
−
∂+
f
(x
)
=
f
(x
),
f
(−∞)
=
−
f
(+∞).
(15)
(∂ + )2
(∂ + )2
(∂ + )2
3 Kinematics
+
Two-Body kinematics Let P⊥ = p1⊥ + p2⊥ , P + = p+
1 + p2 be the c.m. momentum of two on-shell
2
2
particles with 4-momentum p1 , p2 , respectively (pa = ma ). Define the longitudinal momentum fraction
+
xa = p+
a /P , (x1 + x2 = 1), and relative transverse momentum p⊥ = p1⊥ − x1 P⊥ (−p⊥ = p2⊥ − x2 P⊥ ).
Then, the momentum space integration measure admits a factorization:
Z 2 ⊥ +Z 2 ⊥ +
Z 2 ⊥
Z 2 ⊥
Z 2 ⊥ +Z
d p1 dp1
d p2 dp2
d p1 dx1
d p2 dx2
d P dP
d2 p⊥ dx
=
=
.
(16)
(2π)3 2x1
(2π)3 2x2
(2π)3 2P +
(2π)3 2x(1 − x)
(2π)3 2p+
(2π)3 2p+
1
2
3
where x = x1 . Similarly, the two-body Fock state
+
3 2 ⊥
0⊥
0
3 2 ⊥
0⊥
0
hp01 , p02 |p1 , p2 i =2x1 θ(p+
1 )(2π) δ (p1 − p1 )δ(x1 − x1 )2x2 θ(p2 )(2π) δ (p2 − p2 )δ(x2 − x2 )
=2P + θ(P + )(2π)3 δ 3 (P − P 0 )2x(1 − x)(2π)3 δ 2 (p⊥ − p0⊥ )δ(x − x0 )
(17)
=hP 0 ; p0⊥ , x0 |P ; p⊥ , xi.
Furthermore, the two-body invariant mass squared is,
s2 ≡ (p1 + p2 )2 =
p2 + m22
p2 + m21
p2 + m22
p21⊥ + m21
+ 2⊥
− P⊥2 = ⊥
+ ⊥
.
x1
x2
x
1−x
(18)
here ma is the a-th particle’s mass.
Few-Body kinematics Define the few-body c.m. momentum P⊥ =
the momentum fraction and the relative transverse momentum:
P
a
pa⊥ , P + =
P
a
p+
a . Introduce
+
xa = p+
a /P ,
ka⊥ = pa⊥ − xa P⊥
(19)
P
P
Then, it is clear that a xa = 1, and a ka⊥ = 0. The few-body momentum space integration measure
admits a factorization of the c.m. momentum:
Z 2 ⊥ +
X
X
Y Z d2 k ⊥ dxa
Y Z d2 p⊥ dp+
d P dP
a
a
a
+
+
3 2
)
=
)
θ(p
θ(P
×
2(2π)
δ
k
δ
x
−
1
(20)
a⊥
a
a
+
3
+
3
(2π) 2P
(2π) 2xa
(2π)3 2pa
a
a
a
a
The few-body invariant mass squared is,
sn ≡
Lemma
X
pa
2
=
a
X k2 + m2
a
a⊥
x
a
a
(21)
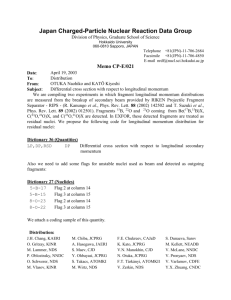
cluster decomposition of sn :
P
P
Let (xa , ka⊥ ), (a = 1, 2 · · · , n) be n relative momenta, i.e.
a xa = 1,
a ka⊥ = 0. Define
new relative momenta with respect to the cluster without the n-th particle: ζa = xa /(1 − xn ),
κa⊥ = ka⊥ + ζa kn⊥ . Then, the n-body invariant mass squared can be written as,
n
n−1
k2 + m2
X
2
X κ2 + m2
ka⊥
+ m2a
a
n
a⊥
−M2 =
− m2n + (1 − xn ) n⊥
− M 2 , (22)
(1 − xn )
xa
ζa
xn (1 − xn )
a=1
a=1
or in short form,
(1 − xn )(sn − M 2 ) = srn−1 − m2n − (1 − xn )(s2 − M 2 ) .
P
k1
k2
k3
..
P
=
−kn
kn
kn
(23)
κ1
κ2
κ3
.
κn−1
kn
Figure 1: Cluster decomposition of the few-body invariant mass squared.
4
4 gamma matrices
In this convention, the 4-by-4 gamma matrices are defined as (cf. Dirac and chiral representation):
!
!
!
!
0 −i
0 i
−iσ 2 0
iσ 1
0
0
3
1
2
γ =
γ =
γ =
γ =
(24)
i 0
i 0
0
iσ 2
0 −iσ 1
where σ = (1, σ) are the standard Pauli matrices,
!
!
!
1 0
0 1
0 −i
0
1
2
, σ =
, σ =
,
σ =
0 1
1 0
i 0
3
σ =
!
1
0
0
−1
.
(25)
The γ-matrices defined here furnish a representation of the Clifford algebra C`1,3 (R):
γ µ γ ν + γ ν γ µ = 2g µν .
(26)
Then, S µν ≡ 4i [γ µ , γ ν ] furnishes a spinorial representation of the Lorentz group. It is convenient to
introduce the following 4-by-4 matrices,
• front-form: γ ± ≡ γ 0 ± γ 3 , γ ⊥ ≡ (γ 1 , γ 2 ), γ L ≡ γ 1 − iγ 2 , γ R ≡ γ 1 + iγ 2 , p
/ = pµ γ µ =
1 − +
2 p γ − p ⊥ · γ⊥
1 + −
2p γ
+
corollaries: γ + γ + = 0; γ − γ − = 0; γ + γ − γ + = 4γ + , γ − γ + γ − = 4γ − ; γ 0 γ ± = γ ∓ γ 0 . The matrix
form are:
!
!
!
!
−σ R 0
0 0
0 −2i
σL
0
R
+
−
L
,
, γ =
γ =
, γ =
, γ =
2i 0
0
0
0 −σ L
0
σR
where,
L
1
2
σ = σ − iσ =
0
0
2
0
!
,
R
1
2
σ = σ + iσ =
0
2
0
0
!
.
• projections: Λ± ≡ Λ± ≡ 21 γ 0 γ ± ;
corollaries: Λ2± = Λ± , Λ+ Λ− = 0, Λ− Λ+ = 0, Λ+ + Λ− = 1.
Λ†± = Λ± , Λ± = Λ∓ , 14 γ + γ − = Λ− , 14 γ − γ + = Λ+ .
Under the convention we use, the projections are diagonal and simple:
!
!
1
0
Λ+ =
, Λ− =
0
1
• parity matrix: β = γ 0 ; charge conjugation matrix: C = −iγ 2 ; time reversal matrix: T = γ 1 γ 3 = Cγ5
• chiral matrix: γ 5 = γ5 ≡ iγ 0 γ 1 γ 2 γ 3 = − 4!i εµνρσ γµ γν γρ γσ is diagonal:
γ5 =
!
σ3
−σ 3
,
1
PL =
2
!
σ−
σ+
1
PR =
2
!
σ+
σ−
,
where PL = 12 (1 − γ5 ) = diag{0, 1, 1, 0}, PR = 21 (1 + γ5 ) = diag{1, 0, 0, 1} are the two chiral
projections, also diagonal. It is easy to see PL2 = PL , PR2 = PR , PL PR = PR PL = 0, PL + PR = 1.
σ-identity:
1
iS µν γ5 = − εµνρσ Sρσ
2
(27)
5
• ψ̄ ≡ ψ † β (for spinorial vector) and Ā = βA† β (for spinorial matrix).
Overbar identities:
γµ = γµ,
S µν = S µν ,
iγ5 = iγ5 ,
γ µ γ5 = γ µ γ5 ,
iγ5 S µν = iγ5 S µν
In other words, the spinorial representation is real.
• spin projection matrix Sz :
Sz = S
12
i
1
= γ1γ2 =
2
2
!
σ3
σ3
,
1
1
S = ijk S jk =
2
2
i
0
iσ i
−iσ i
!
The gamma matrix identities Because gamma matrices satisfy anti-commutation relations, the trace
of a string of gamma matrices follows the Wick theorem (see, e.g., S. Weinberg, The quantum theory of
fields, Vol. 1, 2005):
The trace of the product of gamma matrices equals the sum of all possible contractions with
the corresponding permutation signatures included.
A contraction of any two gamma matrices γµ , γν gives a factor 4gµν . If the two contracted gamma
matrices are not adjacent, there would be a sign (−1)n , where n is the number of exchange operations
needed to makes them adjacent (but keeping their relative order).
Frequently used identities in D = 4 dimensions:
• tr{product of odd number of γ’s} = tr{γ5 · product of odd number of γ’s} = 0
• tr 1 = 4,
tr γ5 = 0
• tr{/
a/b} = 4(a · b),
tr{γ5 a
//b} = 0
/} = −4iεµνρσ aµ bν cρ dσ
tr{γ5 a
//b/cd
√
= (µ, ν, ρ, σ)/ − det g
/} = 4 ((a · b)(c · d) − (a · c)(b · d) + (a · d)(b · c)),
• tr{/
a/b/cd
Note that, when µ, ν, ρ, σ = +, −, 1, 2, εµνρσ
• γµ γ µ = 4, γµ a
a/b, γµ a
a/b/c,
/γ µ = (2 − D)/
//bγ µ = 4(a · b) − (4 − D)/
//b/cγ µ = −2/c/ba
/ + (4 − D)/
a, γµ a
µ
/
/
/
/
/
/
/
/
γµ a
a b /cd;
/ b /cdγ = 2 da
/ b /c + /c b a
/d − (4 − D)/
• a
/a
/ = a2 , a
//b = −/ba
/ + 2(a · b)
5 Spinors
The u, v spinors are defined as,
1
1
1
+
+
⊥
⊥
us (p) = p (p
/ + m)γ χs = p + (p
/ + m)βχs = p + (p + α · p + βm)χs ;
+
2 p
p
p
1
1
1
+
+
⊥
⊥
vs (p) = p (p
/ − m)γ χ−s = p + (p
/ − m)βχ−s = p + (p + α · p − βm)χ−s ;
2 p+
p
p
(28)
where χ+ = (1, 0, 0, 0)| , χ− = (0, 1, 0, 0)| are the basis of the two-component spinors (the dynamical
spinors on the light front) and satisfy:
Λ+ χs = χs ,
Λ− χs = 0,
χ†s χs0 = δss0 ,
1
Sz χ± = ± χ± .
2
(29)
The u, v spinors are polarized in the longitudinal direction:
Sz u± (p+ , p⊥ = 0) = ± 12 u± (p+ , p⊥ = 0),
Sz v± (p+ , p⊥ = 0) = ∓ 12 v± (p+ , p⊥ = 0).
(30)
and following the standard normalization scheme:
ūs (p)us0 (p) = 2mδss0 ,
v̄s (p)vs0 (p) = −2mδss0 ,
6
ūs (p)vs0 (p) = v̄s (p)us0 (p) = 0.
(31)
The spinor identities:
• Dirac equation:
(p
/ − m)uσ (p) = 0,
(p
/ + m)vσ (p) = 0;
(32)
• normalization:
ūs (p)us0 (p) = 2mδss0 ,
• spin sum:
X
v̄s (p)vs0 (p) = −2mδss0 ,
us (p)ūs (p) = p
/ + m,
s=±
X
s=±
ūs (p)vs0 (p) = 0;
(33)
vs (p)v̄s (p) = p
/ − m;
(34)
• crossing symmetry:
√
√
√
√
us (p) = −1v−s (−p), ūs (p) = −1v̄−s (−p), vs (p) = −1u−s (−p), v̄s (p) = −1ū−s (−p); (35)
Note that p → −p flips the sign of all four components of the momentum, including the light-front
energy and the longitudinal momentum.
1
The crossing symmetry is clearer if we define ws (p) = 2p1+ (p
/ + m)γ + χs = √ + us (p), and zs (p) =
p
1
/−m)γ + χ−s
2p+ (p
= √1 + vs (p). Then the cross symmetry between w and z is zs (p) = w−s (−p), z̄s (p) =
p
w̄−s (−p).
• Gordon identities:
2mūs0 (p0 )γ µ us (p) =ūs0 (p0 ) (p + p0 )µ + 2iS µν (p0 − p)ν us (p);
−2mv̄s0 (p0 )γ µ vs (p) =v̄s0 (p0 ) (p + p0 )µ + 2iS µν (p0 − p)ν vs (p);
2mūs0 (p0 )γ µ vs (p) =ūs0 (p0 ) (p0 − p)µ + 2iS µν (p0 + p)ν vs (p);
2mūs0 (p0 )γ µ γ5 us (p) =ūs0 (p0 ) (p − p0 )µ γ5 + 2iS µν (p0 + p)ν γ5 us (p);
0 =ūs0 (p0 ) (p0 − p)µ + 2iS µν (p0 + p)ν us (p);
0 =ūs0 (p0 ) (p + p0 )µ γ5 + 2iS µν (p0 − p)ν γ5 us (p).
(36)
(37)
(38)
(39)
(40)
(41)
• other useful identities:
ūs (p)γ µ us0 (p) = 2pµ δss0 , v̄s (p)γ µ vs0 (p) = 2pµ δss0 ;
p
ūs0 (p0 )γ + γ5 us (p) = 2 p+ p0+ δss0 sign(s);
p
ūs (p)γ + us0 (p0 ) = v̄s (p)γ + vs0 (p0 ) = 2 p+ p0+ δss0
(42)
ūs (p)γ 0 vs0 (−p) = 0
Spinor vertices
In general, the spinor vertex can be written as,
Vn =ūs0 (p0 )/
a1 a
/2 · · · a
/n u( p)
1
+
= p
χ†s0 γ 0 γ + (p0 + m)/
a1 a
/2 · · · a
/n (p
/ + m)γ χs
+
0+
4 p p
1
+
= p
χ†s0 Λ+ (p0 + m)/
a1 a
/2 · · · a
/n (p
/ + m)γ χs
+
0+
2 p p
0
1
+
= p
tr (p
a1 a
/2 · · · a
/ n (p
/ + m)/
/ + m)γ χss0
+
0+
4 p p
7
(43)
Now the spinor vertex is turned into the trace
1 + γ5 ,
1 1 − γ5 ,
1
†
0
χs χs0 , χss =
2
2
−γ R = −γ 1 − iγ 2 ,
L
γ = γ 1 − iγ 2 ,
of a string of gamma matrices, and
s = +, s0 = +
s = −, s0 = −
(44)
s = +, s0 = −
s = −, s0 = +
• scalar vertex: (pR = p1 + ip2 , pL = p1 − ip2 , pµ pµ = m2 )
1
1
p0+ ,
mR p+ +
p
p
p0R
ūs0 (p0 )us (p) = −v̄s (p)vs0 (p0 ) = p+ p0+
p+ − p0+ ,
p0L − pL ,
p0+
p+
s, s0 = ++, −−
s, s0 = +, −
(45)
0
s, s = −, +
• pseudo scalar vertex: (pR = p1 + ip2 , pL = p1 − ip2 , pµ pµ = m2 )
m p10+ − p1+ ,
m 1 − 1 ,
p
0
0
p+
p0+
+
0+
ūs0 (p )γ5 us (p) = −v̄s (p)γ5 vs0 (p ) = p p
pR
p0R
p+ − p0+ ,
pL
p0L
p+ − p0+ ,
• vector vertex: (pR = p1 + ip2 , pL = p1 − ip2 , pµ pµ = m2 )
p
ūs0 (p0 )γ + us (p) = v̄s (p)γ + vs0 (p0 ) =2 p+ p0+ δss0
m2 + pR p0L ,
m2 + pL p0R ,
2
ūs0 (p0 )γ − us (p) = v̄s (p)γ − vs0 (p0 ) = p
m(pR − p0R ),
p+ p0+
m(p0L − pL ),
0L
p
p0+ ,
pL ,
p
0 L
L
0
p+
+
0+
0
0
ūs (p )γ us (p) = v̄s (p)γ vs (p ) =2 p p
1
1
m p0+ − p+ ,
0,
R
p
p+ ,
p0R ,
p
p0+
ūs0 (p0 )γ R us (p) = v̄s (p)γ R vs0 (p0 ) =2 p+ p0+
0,
m p1+ − p10+ ,
8
s, s0 = ++
s, s0 = −−
s, s0 = +, −
(46)
s, s0 = −, +
s, s0 = +, +
s, s0 = −, −
s, s0 = +, −
s, s0 = −, +
s, s0 = +, +
s, s0 = −, −
s, s0 = +, −
s, s0 = −, +
s, s0 = +, +
s, s0 = −, −
s, s0 = +, −
s, s0 = −, +
(47)
• pseudo vector:
p
p+ p0+ δss0 sign(s)
−m2 + p0L pR ,
m2 − p0R pL ,
2
ūs0 (p0 )γ − γ5 us (p) = −v̄s (p)γ − γ5 vs0 (p0 ) = p
m(pR + p0R ),
p+ p0+
m(pL + p0L ),
0L
p
p0+ ,
− pL ,
p
0 L
L
0
p+
+
0+
0
0
ūs (p )γ γ5 us (p) = −v̄s (p)γ γ5 vs (p ) = 2 p p
1
1
m p+ + p0+ ,
0,
R
p
p+ ,
0R
p
− pp0+ ,
ūs0 (p0 )γ R γ5 us (p) = −v̄s (p)γ R γ5 vs0 (p0 ) = 2 p+ p0+
0,
m p1+ + p10+ ,
ūs0 (p0 )γ + γ5 us (p) = −v̄s (p)γ + γ5 vs0 (p0 ) = 2
s, s0 = +, +
s, s0 = −, −
s, s0 = +, −
s, s0 = −, +
s, s0 = +, +
s, s0 = −, −
(48)
s, s0 = +, −
s, s0 = −, +
s, s0 = +, +
s, s0 = −, −
s, s = +, −
s, s = −, +
6 Polarization of massless vector bosons
Define the polarization vector:
− ⊥
εµλ (k) = (ε+
λ , ελ , ελ ) = (0, 2
⊥
⊥
⊥
λ ·k
k+ , λ ),
(λ = ±1)
(49)
√
√
√1 (1, ±i). In fact, εL =
where ⊥
2δλ,+ , εR
2δλ,− . This definition satisfies the light-cone gauge
± =
λ
λ =
2
+
µ
ω · A = A = 0 and Lorenz condition ∂µ A = 0,
ωµ εµλ (k) = ε+
λ (k) = 0,
kµ εµλ (k) = 0.
(50)
√1
There is another set of conventions that define ⊥
± = − 2 (1, ±i).
Polarization identities:
• orthogonality:
εµλ (k)ε∗λ0 µ (k) = −δλ,λ0 ;
(51)
• helicity sum:
X
j
ij
εi∗
λ (k)ελ (k) = δ ,
λ=±
dµν ≡
X
λ=±
ν
µν
εµ∗
+
λ (k)ελ (k) = −g
ωµ kν + ων kµ
k2
− ωµ ων
. (52)
ω·k
(ω · k)2
In particular, if k is on-shell, i.e. k 2 = 0, the second identity is reduced to
X
λ=±
ν
µν
εµ∗
+
λ (k)ελ (k) = −g
ωµ kν + ων kµ
.
ω·k
(53)
• crossing symmetry:
µ
µ
εµ∗
λ (k) = ε−λ (k) = ε−λ (−k)
(54)
where ω µ = (1, 0, 0, −1), is the null normal vector of light-front, ω · ω = 0, ω · v = v + .
9
7 Spin vector of massive vector bosons
Define the spin vector for the massive vector bosons:
(
2
2
k⊥
k+ k⊥ −m
λ=0
+
−
⊥
m , mk+ , m ,
eλ (k) = (eλ (k), eλ (k), eλ (k)) =
⊥
⊥
·k
0, 2 λk+ , ⊥
λ = ±1
λ ,
where where ⊥
± =
√1 (1, ±i),
2
(55)
⊥
2
µ
2
1
and ⊥∗
+ = − , m = kµ k , k is the mass of the particle .
Spin identities:
• Proca equation, kµ eµλ (k) = 0.
• orthogonality:
eµλ (k)e∗λ0 µ (k) = −δλ,λ0 ;
(56)
• spin sum:
K µν ≡
+1
X
λ=−1
ν
µν
eµ∗
+
λ (k)eλ (k) = −g
kµ kν
.
k2
(57)
k µ Kµν (k) = k µ k ν Kµν (k) = 0.
• crossing symmetry:
µ
eµ∗
λ (k) = e−λ (k),
1 There
eµλ (−k) = (−1)λ+1 eµλ (k);
(58)
√1 (1, ±i). One should be careful about the consistency of the
is another set of conventions that define ⊥
± = −
2
√1 (1, ±i) the eigenvalue of the mirror parity
conventions one chooses. For example, under the definition of ⊥
± = −
2
(light-front parity) operator m̂P = R̂x (π)P̂ of a vector state is m̂P |p+ , p1 , p2 , j, mj i = (−i)2j P |p+ , −p1 , p2 , j, −mj i.
√1 (1, ±i), there will be an extra minus sign, i.e., m̂P |p+ , p1 , p2 , j, mj i =
But if one use our definition ⊥
± =
2
−(−i)2j P |p+ , −p1 , p2 , j, −mj i.
10