Basic graph theory 18.S995 - L19
advertisement

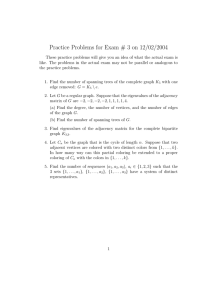
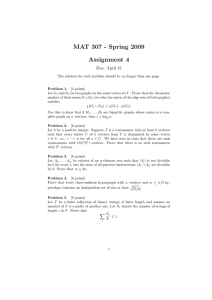
Basic graph theory 18.S995 - L19 dunkel@math.mit.edu no cycles http://java.dzone.com/articles/algorithm-week-graphs-and Isomorphic graphs f(a) = 1 ! f(b) = 6! f(c) = 8! f(d) = 3! f(g) = 5! f(h) = 2! f(i) = 4! f(j) = 7 image source: wiki http://java.dzone.com/articles/algorithm-week-graphs-and http://java.dzone.com/articles/algorithm-week-graphs-and http://java.dzone.com/articles/algorithm-week-graphs-and Complete simple graphs on n vertices K1 K2 K3 K4 K5 K6 K7 K8 K9 K10 K11 K12 Bi-partite graph Planar, non-planar & dual graphs (a) (b) (c) (d) Figure 1.2: Planar, non-planar and dual graphs. (a) Plane ‘butterfly’graph. (b, c) Nonplanar graphs. (d) The two red graphs are both dual to the blue graph but they are not isomorphic. Image source: wiki. Given a graph G, its line graph or derivative L[G] is a graph such that (i) each vertex of L[G] represents an edge of G and (ii) two vertices of L[G] are adjacent if and only if their corresponding edges share a common endpoint (‘are incident’) in G (Fig. ??). This construction can be iterated to obtain higher-order line (or derivative) graphs. 1.3 Adjacency and incidence Algebraic characterization |V|x|V| matrix http://java.dzone.com/articles/algorithm-week-graphs-and connected by an edge. The adjacency matrix A(G) = (Aij ) is a |V | ⇥ |V |-matrix that lists D(G) = diag deg(v1 ), . . . , deg(v|V | ) (1.4) all the connections in a graph. If the graph is simple, then A is symmetric and has only Characteristic polynomial 0 1 For the graph in Fig. 1.3a, one has 3 0 0 0 0 C we have entries 0 or 1. For example, for theB 0 2 in 0 Fig. 0 01.3a, Bgraph C 0 1 B D = B0 00 12 10 10C (1.5) C0 @0B 0 0 3 0AC B10 00 00 02 1C 0 C A=B (1.1) B1 0 0 1 0 C @1 characteristics 0 1 0 1A of random graphs, and we will The degree distribution is an important (a) (b) (c) (d) 0 1 0 1 0 return to this topic further below. ~ If is simple, directed,then we the maydiagonal still define a signed adjacency If the the graph graph is elements of A are zero.matrix A with elements 8 The columnof(row) sum definesThese the degree (connectivity) of the vertex Figure 1.3: Construction a line graph. figures show (a, with blue vertices) > from vi toavjgraph < 1, if edge goes X and its line graph (d, with green vertices). Each vertex thevi line graph is shown(1.6) labeled ~ Aij = +1, deg if edge vj to (vi ) goes = from Aij of (1.2) > : with the pair of endpoints of the corresponding in the original graph. For instance, j 0, otherwiseedge the green vertex on volume the right labeled corresponds to the edge on the left between the and the of the graph is1,3 given by The characteristic polynomial of a graph is defined as the characteristic polynomial of X X other green vertices: 1,4 and 1,2 blue vertices 1 and 3. Green vertex 1,3 is adjacent to three the adjacency matrix vol(G) = deg (vi ) = Aij (1.3) (corresponding to edges sharing the endpointV 1 in the blue graph) and 4,3 (corresponding ij = det(A xI) (1.7) to an edge sharing the endpoint 3 in p(G; the x) blue graph). Image and text source: wiki. The degree matrix D(G) is defined as the diagonal matrix For the graph in Fig. 1.3a, we find D(G) = diag deg(v1 ), . . .2, deg(v (1.4) 4 |V | ) p(G; x) = x(4 2x 6x + x ) (1.8) For the graph in Fig. 1.3a, one has Characteristic polynomials are not diagnostic for graph 0 1 isomorphism, i.e., two noniso3 0 0 0polynomial. 0 morphic graphs may share the same characteristic B0 2 0 0 0C B C B D = B40 50 2 0 0C (1.5) C @0 0 0 3 0A 0 0 0 0 2 The degree distribution is an important characteristics of random graphs, and we will return to this topic further below. ~ with elements If the graph is directed, we may still define a signed adjacency matrix A Adjacency matrix Nauru graph “integer graph” |V|x|V| matrix http://java.dzone.com/articles/algorithm-week-graphs-and List http://java.dzone.com/articles/algorithm-week-graphs-and Complexity ! Basic operations in a graph are: 1. Adding an edge 2. Deleting an edge 3. Answering the question “is there an edge between i and j” 4. Finding the successors of a given vertex 5. Finding (if exists) a path between two vertices Complexity In case that we’re using adjacency matrix we have: 1. Adding an edge – O(1) 2. Deleting an edge – O(1) 3. Answering the question “is there an edge between i and j” – O(1) 4. Finding the successors of a given vertex – O(n) 5. Finding (if exists) a path between two vertices – O(n^2) Complexity List While for an adjacency list we can have: 1. Adding an edge – O(log(n)) 2. Deleting an edge – O(log(n)) 3. Answering the question “is there an edge between i and j” – O(log(n)) 4. Finding the successors of a given vertex – O(k), where “k” is the length of the lists containing the successors of i 5. Finding (if exists) a path between two vertices – O(n+m) with m <= n http://java.dzone.com/articles/algorithm-week-graphs-and connected by an edge. The adjacency matrix A(G) = (Aij ) is a |V | ⇥ |V |-matrix that lists all the connections in a graph. If the graph is simple, then A is symmetric and has only Degree matrix (a) entries 0 or 1. For example, for the graph in Fig. 1.3a, we have 0 1 0 1 1 1 0 B1 0 0 0 1 C B C B A = B1 0 0 1 0 C C @1 0 1 0 1 A (b) (c) 0 1 0 1 0 (1.1) (d) If the graph is simple, then the diagonal elements of A are zero. The columnof(row) sum definesThese the degree (connectivity) of the vertex Figure 1.3: Construction a line graph. figures show a graph (a, with blue vertices) X and its line graph (d, with green vertices). Each vertex labeled deg (vi ) = Aij of the line graph is shown (1.2) with the pair of endpoints of the corresponding edge in the original graph. For instance, j the green vertex on volume the right labeled corresponds to the edge on the left between the and the of the graph is1,3 given by X X other green vertices: 1,4 and 1,2 blue vertices 1 and 3. Green vertex 1,3 is adjacent to three vol(G) = deg (vi ) = Aij (1.3) (corresponding to edges sharing the endpointV 1 in the blue graph) and 4,3 (corresponding ij to an edge sharing the endpoint 3 in the blue graph). Image and text source: wiki. The degree matrix D(G) is defined as the diagonal matrix D(G) = diag deg(v1 ), . . . , deg(v|V | ) For the graph in Fig. 1.3a, one has 0 3 B0 B D=B B40 @0 0 0 2 0 0 0 0 0 2 0 0 0 0 0 3 0 1 0 0C C 0C C 0A 2 (1.4) (1.5) The degree distribution is an important characteristics of random graphs, and we will return to this topic further below. ~ with elements If the graph is directed, we may still define a signed adjacency matrix A 0 0 1 1 1 0 Figure 1.2: Planar, non-planar and dual graphs. (a) Plane ‘butterfly’graph. (b, c) Nonplanaryielding graphs. The two polynomial red graphs are both dual to the blue graph but they are not the(d) characteristic isomorphic. Image source: wiki. 2 2 p(L[G]; x) = (x + 2) x + x 1 [(x 3)x x + 2] (1.12) Directed incidence In addition to the undirected matrix C, we Given a graph G, its matrix line graph or derivative L[G] is aincidence graph such that (i)still each vertex ~ as follows define a directedan |V |edge ⇥ |E|-matrix C of L[G] represents of G and (ii) two vertices of L[G] are adjacent if and only if 8 a common endpoint (‘are incident’) in G (Fig. ??). This their corresponding edges share > < 1, if edge es departs from vi construction can be iterated ~ =to obtain higher-order line (or derivative) graphs. C (1.13) is 1.3 > : +1, if edge es arrives at vi 0, otherwise Adjacency and incidence For undirected graphs, the assignment of the edge direction is arbitrary – we merely have ~ sum to 0. For the graph in Fig. 1.3a, one to ensure that the columns s = 1, . . . , |E| of C Adjacency matrix Two vertices v1 and v2 of a graph are called adjacent, if they are finds 0 1ij ) is a |V | ⇥ |V |-matrix that lists connected by an edge. The adjacency matrix A(G) = (A 1 1 1 0 0 0 all the connections in a graph.BIf1 the0 graph A is symmetric and has only C 0 is1 simple, 0 0 then B C ~ =B 0 1 0 0 1 0C C (1.14) B C @0 0 1 0 1 1A 0 0 0 1 0 1 6 (a) (b) (c) (d) Figure 1.3: Construction of a line graph. These figures show a graph (a, with blue vertices) and its line graph (d, with green vertices). Each vertex of the line graph is shown labeled with the pair of endpoints of the corresponding edge in the original graph. For instance, (a) (b) A(L[G]) = C(G)> · C(G) 2I (c) , A(L[G])rs = Cir C(d) 2 is (1.10) rs example in Fig. 1.3, we thus find 1.3.1For the Laplacian 0 graphs. (a) 1 Figure 1.2: Planar, non-planar and dual Plane ‘butterfly’graph. (b, c) Non0 1 1 1 0 0 The |V | ⇥ |V |-Laplacian matrix L(G) of a graph G, often also referred to as Kirchho↵ B planarmatrix, graphs. (d) The two red graphs 1.3.1 are both to the blue graph matrix but they are not 1 Laplacian 0 dual 1 matrix 0C B1 0 degree C is defined as the di↵erence between and adjacency C isomorphic. Image source: wiki.A(L[G]) = B B1 1 0 0 1 1 C (1.11) B= matrix L(G) of a graph(1.15a) G, often also re 0|V |0⇥A 0|V 0|-Laplacian 1C LThe B1 D C @0 1 1is defined 0 0 1A matrix, as the di↵erence between degree matrix and adja Hencea graph G, its line graph or derivative 0 0 1 1L[G] 1 0 is a graph such that (i) each vertex Given L=D A 8 of L[G] represents edge> G iand deg(v ), if(ii) i =two j vertices of L[G] are adjacent if and only if yielding thean characteristic polynomial <of Hence their corresponding edges a common (‘are incident’) This 8 Lij = share (1.15b) 1, if vi 2andendpoint vj are connected by edge in G (Fig. ??). 2 > p(L[G]; x) = (x + 2) x + x 1 [(x 3)x x+ 2] i ), if i = j (1.12) > deg(v : to < construction can be iterated obtain higher-order line (or derivative) graphs. 0, otherwise Lij = 1, if vi and vj are connected by edg > matrix In addition to the undirected incidence matrix C, we still : As weDirected shall seeincidence below, this matrix provides an important characterization of the underlying 0, otherwise ~ as follows define a directed |V | ⇥ |E|-matrix C 1.3 graph. Adjacency and8incidence As we shall see below, this matrix provides an important characteriza The |V | ⇥ |V |-Laplacian matrix alsoebe expressed in terms of the directed incidence > ifgraph. edge s departs from vi < 1, can ~matrix matrix C, as +1,v1 ifand edge arrives at vi Adjacency Two C~vertices ves2|V of| ⇥a|Vgraph are called adjacent, if they are is = The |-Laplacian matrix can also(1.13) be expressed in terms of > : ~ as = (Aij ) is a |V | ⇥ |V |-matrix that lists 0, >matrix otherwise matrix A(G) C, connected by an edge. The L adjacency ~ ~ ~ ir C ~ jr =C ·C , Lij = C (1.16) > all the connections in graphs, a graph. If the graph simple, then A is~ symmetric and has only ~we ~ C ~ For undirected the assignment of theis edge direction is arbitrary merely L=C ·–C ,have L = C (a) For graph 1.3a,s = one ~ sum to 0. For the graph in Fig. 1.3a, one to the ensure that in theFig. columns 1, .finds . . , |E| of C 0 1 1.3a, one finds For the graph in Fig. finds 3 1 1 1 0 0 0B 1C 3 1 1 1 2 0 0 1 1 1 1 0 0 0 B C B 1 2 0 B C B B L =BB1 1 0 0 0 2 1 01 00CC ~ = B@ CC 2 L=B 0 1 0 0 1 0 C A B 1 0 (1.14) 1 0 1 3 1C B @ 1 0 @0 1 0 1 0 1 1A 0 1 0 1 2 (b) 0 0 0 1 (c) 0 1 0 (d) 1 0 Properties We denote the eigenvalues of L by We denote the eigenvalues of L by Properties 6 ij ir 1 1 0 0 (1.17) 1C C 1 0C C 3 1A 1 2 jr Normalized Laplacian The associated normalized Laplacian L(G) is defined as L=D 1/2 ·L·D 1/2 =I D 1/2 ·A·D 1/2 (1.19a) with elements 8 > if i = j and deg(vi ) 6= 0 <1, p Lij = 1/ deg(vi ) deg(vj ), if i 6= j and vi and vj are connected by edge (1.19b) > : 0, otherwise One can write L(G) as, cf. Eq. (1.16), > ~ ~ L(G) = B · B ~ is an |V | ⇥ |E|-matrix where where B 8 p > < 1/pdeg(vi ), if edge es departs from vi ~ is = +1/ deg(vi ), if edge es arrives at vi B > : 0, otherwise (1.20a) (1.20b) A ‘0-chain’ is a real-valued vertex function g : V ! R, and a ‘1-chain’ is a real-valued ~ = (B ~ is ) can be viewed as boundary operator that maps edge function E ! R. Then B > ~ ~ si ) is a co-boundary operator 1-chains onto 0-chains, while the transposed matrix B = (B that maps 0-chains onto 1-chains. Accordingly L can be viewed as an operator that maps vertex functions g, which can be viewed as |V |-dimensional column vector, onto another > if i = j and deg(vi ) 6= 0 <1, p Lij = 1/ deg(vi ) deg(vj ), if i 6= j and vi and vj are connected by edge (1.19b) > : 0, otherwise 0-chain 0.4 That is, from one set of values ass 1-chain One can write L(G) as, cf. Eq. (1.16), -0.2 > ~ ~ L(G) = B · B (1.20a) ~ is an |V | ⇥ |E|-matrix where where B 8 p0.1 0.1 > < 1/pdeg(vi ), if edge es departs from vi ~ is = +1/ deg(vi ), if edge es arrives at vi B > : 0, otherwise (1.20b) A ‘0-chain’ is a real-valued vertex function gFigure : V ! R, and(a) a ‘1-chain’ is a real-valued 6: An example of 1-chain ~ ~ edge function E ! R. Then B = (Bis ) can be viewed as boundary operator that maps simplex); example of 1-ch ~ > = ((b) ~ si )ais second 1-chains onto 0-chains, while the transposed matrix B B a co-boundary operator that maps 0-chains onto 1-chains. Accordingly L can be viewed as an operator that maps vertex functions g, which can be viewed as |V |-dimensional column vector, onto another vertex function L · g, such that " # X 1 g(vi ) g(vj ) p p (L · g)(vi ) = p (1.21) deg(vj ) deg(vi ) vj ⇠vi deg(vi ) plex, one can deduce another set of boundaries of each simplex by the operation is very natural, and can explained next. where vj ⇠ vi denotes the set of adjacent nodes. 3.2.4 Implementation of the where vj ⇠ vi denotes the set of adjacent nodes. We denote the eigenvalues of L by 0= 0 1 ... (6.22) |V | 1 Abbreviating n = |V |, one can show that P (i) i i n with equality i↵ G has no isolated vertices. (ii) 1 n/(n (iii) If n 1) with equality i↵ G is the complete graph on n 2 and G has no isolated vertices, then (iv) If G is not complete, then (v) If G is connected, then (vi) If i = 0 and i+1 1 n 1 n/(n 2 vertices. 1). 1. 1 > 0. > 0, then G has exactly i + 1 connected components. (vii) For all i n 1, we have bipartite and nontrivial. i 2, with n 1 = 2 i↵ a connected component of G is (viii) The spectrum of a graph is the union of the spectra of its connected components. See Chapter 1 in [Chu97] for proofs. Examples: • For a complete graph Kn on n n/(n 1) (multiplicity n 1) 2 vertices, the eigenvalues are 0 (multiplicity 1) and Examples: • For a complete graph Kn on n n/(n 1) (multiplicity n 1) 2 vertices, the eigenvalues are 0 (multiplicity 1) and • For a complete bipartite graph Km,n on m + n vertices, the eigenvalues are 0 and 1 (multiplicity m + n 2) and 2. • For the star Sn on n and 2. 2 vertices, the eigenvalues are 0 and 1 (multiplicity n • For the path Pn on n k = 0, . . . , n 1. 2 vertices, the eigenvalues are • For the cycle Cn on n k = 0, . . . , n 1. k 2 vertices, the eigenvalues are n • For the n-cube Q on 2 vertices, the eigenvalues are n ✓ ◆ n for k = 0, . . . , n. k 9 k =1 k cos[⇡k/(n = 1 2) 1)] for cos[2⇡k/n] for = 2k/n, with multiplicity 3.1 Graph Laplacian Laplacian e |V | ⇥ |V |-Laplacian matrix L(G) of a graph G, often also referred to as Kirchho↵ trix, is defined as the di↵erence between degree matrix and adjacency matrix nce L=D A (1.15a) 8 > <deg(vi ), if i = j Lij = 1, if vi and vj are connected by edge > : 0, otherwise degree matrix (1.15b) we shall see below, this matrix provides an important characterization of the underlying ph. The |V | ⇥ |V |-Laplacian matrix can also be expressed in terms of the directed incidence ~ as trix C, > ~ ~ L=C ·C ~ ir C ~ jr Lij = C , For the graph in Fig. 1.3a, one finds 0 3 1 B 1 2 B L=B B 1 0 @ 1 0 0 1 1 0 2 1 0 1 0 1 3 1 1 0 1C C 0C C 1A 2 (1.16) adjacency matrix (1.17) operties We denote the eigenvalues of L by 0 1 ... |V | e following properties hold: ) L is symmetric. ) L is positive-semidefinite, that is i 0 for all i. 2 (1.18) Laplacian matrix 0 B B L=B B @ 3 1 1 1 0 1 2 0 0 1 1 0 2 1 0 1 0 1 3 1 1 0 1C C 0C C 1A 2 (1.17) Properties We denote the eigenvalues of L by 0 1 ... |V | (1.18) The following properties hold: (i) L is symmetric. (ii) L is positive-semidefinite, that is i 0 for all i. (iii) Every row sum and column sum of L is zero.2 (iv) 0 = 0 as the vector v 0 = (1, 1, . . . , 1) satisfies L · v 0 = 0. (v) The multiplicity of the eigenvalue 0 of the Laplacian equals the number of connected components in the graph. (vi) The smallest non-zero eigenvalue of L is called the spectral gap. (vii) For a graph with multiple connected components, L can written as a block diagonal matrix, where each block is the respective Laplacian matrix for each component. 2 The degree of the vertex is summed with a -1 for each neighbor 7 Given a graph G, its line graph or derivative L[G] is a graph such that (i) each verte of L[G] represents an edge of G and (ii) two vertices of L[G] are adjacent if and only their corresponding edges share a common endpoint (‘are incident’) in G (Fig. ??). Th Line graphs of undirected construction can be iterated to obtain higher-order line (orgraphs derivative) graphs. 1.3 1. draw vertex for each incidence edge in G Adjacency and 2. connect vertices if edges have joint point Adjacency matrix Two vertices v1 and v2 of a graph are called adjacent, if they ar connected by an edge. The adjacency matrix A(G) = (Aij ) is a |V | ⇥ |V |-matrix that list all the connections in a graph. If the graph is simple, then A is symmetric and has onl (a) (b) (c) (d) Figure 1.3: Construction of a line graph. These figures show a graph (a, with blue vertices and its line graph (d, with green vertices). Each vertex of the line graph is shown labele with the pair of endpoints of the corresponding edge in the original graph. For instanc the green vertex on the right labeled 1,3 corresponds to the edge on the left between th blue vertices 1 and 3. Green vertex 1,3 is adjacent to three other green vertices: 1,4 and 1, Line graphs of directed graphs Adjacency matrix Two vertices v1 and v2 of a graph are called adjacent, if they are connected edge. Thematrix adjacency matrix matrix A(G) C=of(A a a|V |V || ⇥ ⇥|E|-matrix |V |-matrix Incidence The incidence graph G is withthat Cis =lists 1 ij ) is uch that by (i)aneach vertex Incidence matrix The incidence matrix C of graph G is a|V | ⇥ |E|-matrix with Cis = 1 if edge is contained in edge es , and C For the graph in Fig. 1.3a, with is = 0 otherwise. all the connections in aifviedge graph. If the graph is simple, then A is symmetric and has v is contained in edge e , and C = 0 otherwise. For the graph in only Fig. 1.3a, with i s we have is adjacent if and if i = 1,only . . . , 5 vertices and s = 1, . . . , 6 edges, i = 1, . . . , 5 vertices and s 0 = 1, . . . , 6 edges, 1 we have nt’) in G (Fig. ??). This 1 1 1 00 0 0 1 B1 0 0 11 01 01C 0 0 0 B C tive) graphs. B B C = 0 1 0 B01 10 00C 1 0 0C C (1.9) B C @0 C0 =1 B00 11 10A 0 1 0C B C @ 0 0 0 10 00 11 0 1 1A (1.9) 0 0 0 1 0 1 (a) The incidence (b) matrix C(G) of a graph (c) G and the adjacency matrix (d) A(L[G]) of its line graph L[G]The are related by matrix C(G) of a graph G and the adjacency matrix A(L[G]) of its line incidence graph L[G]=are related by 2I > A(L[G]) C(G) · C(G) , A(L[G]) = C C 2 (1.10) led adjacent, if they are Figure 1.3: Construction of a line graph. These figures show a graph (a, with blue vertices) > A(L[G]) = C(G) · find C(G) 2I , A(L[G]) = Cir Cis 2 rs the example in Fig. 1.3, we thus its |-matrix line graphFor (d, with green vertices). Each vertex of the line graph rsis shown labeled |and ⇥ |V that lists 0 1 with the pair of endpoints of the corresponding edge in the original graph. For instance, the example in Fig. 1.3, we0thus 1 1find 1 0 0 symmetric and hasForonly B1 0 1 0 1 0 C rs ir is rs the green vertex on the right labeled 1,3 corresponds to on the 0 the edge 1 left between the B C B1 1 0 00 11 1C 1 1 0 0 C blue vertices 1 and 3. Green vertex 1,3 A(L[G]) is adjacent to three other green vertices: 1,4 and =B (1.11)1,2 C B1 0 0 B01 00 1C 1 0 1 0 C B graph) C (corresponding to edges sharing the endpoint 1B and 4,3 (corresponding @in B01 01 1A 0 the 1 1 blue 0 0 1 1C B C B11 10 0and C 0 0 =1 Image to an edge sharing the endpoint 3 in the blueA(L[G]) graph). wiki. 0 0 text 0 1source: B C yielding the characteristic polynomial p(L[G]; x) = (x + 2) x2 + x yielding the characteristic polynomial (d) @0 1 1 0 0 1 A 0 0 1 1 1 0 1 [(x 3)x2 x + 2] (1.10) (1.11) (1.12) Directed incidence matrix In addition to the2 undirected incidence2 matrix C, we still p(L[G]; x)~ = (x + 2) x + x 1 [(x 3)x x + 2] (1.12) define a directed |V | ⇥ |E|-matrix C as follows 8 4 Directed incidence> In eaddition thevundirected incidence matrix C, we still 1, if edge from s departsto i <matrix ~ as follows ~ is|V=| ⇥+1, define a directed |E|-matrix C (1.13) if edge C es arrives at vi > : 8 Isomorphic graphs image source: wiki f(a) = 1 ! f(b) = 6! f(c) = 8! f(d) = 3! f(g) = 5! f(h) = 2! f(i) = 4! Whitney graph isomorphism theorem: Two connected graphs are isomorphic if and only if their ! line graphs are isomorphic, with a single exception: K3, the complete graph on three vertices, and the ! complete bipartite graph K1,3, which are not isomorphic but both have K3 as their line graph. Whitney, Hassler (January 1932). "Congruent Graphs and the Connectivity of Graphs". Amer. J. Mathematics (The Johns Hopkins University Press) 54 (1): 150–168 Line graphs of line graphs of …. van Rooij & Wilf (1965):! When G is a finite connected graph, only four possible behaviors are possible for this sequence:! ! •! If G is a cycle graph then L(G) and each subsequent graph in this sequence is isomorphic to G itself. These are the only connected graphs for which L(G) is isomorphic to G.! ! •! If G is a claw K1,3, then L(G) and all subsequent graphs in the sequence are triangles.! ! •! If G is a path graph then each subsequent graph in the sequence is a shorter path until eventually the sequence terminates with an empty graph.! ! •! In all remaining cases, the sizes of the graphs in this sequence eventually increase without bound.! ! If G is not connected, this classification applies separately to each component of G. Chromatic number smallest number of colors needed to color the vertices of so that no two adjacent vertices share the same color NP complete problem: NP (verifiable in nondeterministic polynomial time) and NP-hard (any NP-problem can be translated into this problem)