Dual-plane stereoscopic particle image velocimetry: system set-up
advertisement

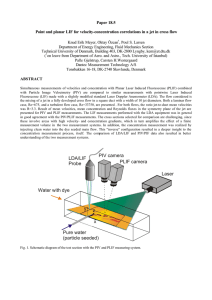
Experiments in Fluids 31 (2001) 277±293 Ó Springer-Verlag 2001 Dual-plane stereoscopic particle image velocimetry: system set-up and its application on a lobed jet mixing flow H. Hu, T. Saga, T. Kobayashi, N. Taniguchi, M. Yasuki Abstract The technical basis and system set-up of a dualplane stereoscopic particle image velocimetry (PIV) system, which can obtain the ¯ow velocity (all three components) ®elds at two spatially separated planes simultaneously, is summarized. The simultaneous measurements were achieved by using two sets of double-pulsed Nd:Yag lasers with additional optics to illuminate the objective ¯uid ¯ow with two orthogonally linearly polarized laser sheets at two spatially separated planes, as proposed by Kaehler and Kompenhans in 1999. The light scattered by the tracer particles illuminated by laser sheets with orthogonal linear polarization were separated by using polarizing beam-splitter cubes, then recorded by high-resolution CCD cameras. A three-dimensional in-situ calibration procedure was used to determine the relationships between the 2-D image planes and three-dimensional object ®elds for both position mapping and velocity three-component reconstruction. Unlike conventional two-component PIV systems or single-plane stereoscopic PIV systems, which can only get one-component of vorticity vectors, the present dual-plane stereoscopic PIV system can provide all the three components of the vorticity vectors and various auto-correlation and cross-correlation coef®cients of ¯ow variables instantaneously and simultaneously. The present dual-plane stereoscopic PIV system was applied to measure an air jet mixing ¯ow exhausted from a lobed nozzle. Various vortex structures in the lobed jet mixing ¯ow were revealed quantitatively and instantaneously. In order to evaluate the measurement accuracy of the present dualplane stereoscopic PIV system, the measurement results were compared with the simultaneous measurement results of a laser Doppler velocimetry (LDV) system. It was found that both the instantaneous data and ensembleaveraged values of the stereoscopic PIV measurement results and the LDV measurement results agree well. For the ensemble-averaged values of the out-of-plane velocity component at comparison points, the differences between the stereoscopic PIV and LDV measurement results were found to be less than 2%. 1 Introduction As a non-intrusive whole ¯ow ®eld measuring technique, particle imaging velocimetry (PIV) has matured from a developmental stage to a reliable ¯ow velocity ®eld measuring method in the past two decades. At its current stage, the application of the PIV technique touches upon almost all ¯uids-related ®elds, ranging from the fundamental ¯uid mechanical study of shear ¯ow and turbulent transition to the engineering ®eld of turbo-machinery, automobile and aircraft designing. The ``classical'' PIV technique is a two-component, twodimensional (2C-2D) measuring technique, which is only capable of obtaining two components of the ¯ow velocity vector in the plane of illuminating laser sheet. The out-ofplane component of the velocity vector is lost, while the inplane components are affected by an unrecoverable error due to the perspective transformation (Prasad and Adrian Received: 18 April 2000/Accepted: 2 February 2001 1993). Recent advances in the PIV technique have been diH. Hu (&)1, T. Saga, T. Kobayashi, N. Taniguchi rected towards obtaining all three-components of ¯uid Institute of Industrial Science, University of Tokyo Roppongi 7-22-1, Minato-Ku, Tokyo 106-8558, Japan velocity vectors in a plane or in a volume simultaneously e-mail: huhui@egr.msu.edu to allow the application of the PIV technique to more complex ¯ow phenomena. Several advanced PIV methods M. Yasuki or techniques have been developed successfully in recent Industrial Instruments Department, Seika Corporation years, which include the 3C-3D PIV techniques such as the 1-5-3 Koraku, Bunkyo-ku, Tokyo, Japan holographic PIV (HPIV) method and three-dimensional 1 (3-D) particle tracking velocimetry (3D-PTV) method, and Present address: Turbulent Mixing and Unsteady Aerodynamics Laboratory 3C-2D PIV technique such as the stereoscopic PIV (SPIV) A22, Research Complex Engineering method used in the present study. Michigan State University, East Lansing, MI 48824, USA HPIV (Barnhart et al. 1994; Zhang et al. 1997) utilizes the holography technique for PIV recording, which enThe authors wish to thank Mr. T. Higashiyama of Kanomax Corp. ables the measurement of three components of velocity vectors throughout a volume of ¯uid ¯ow. Of the existing and Mr. S. Segawa of the Institute of Industrial Science, 3-D PIV methods, holography is capable of the highest University of Tokyo, for their help in conducting the present study. measurement precision (Willert 1997). However, HPIV 277 278 is also the most complex and requires a signi®cant investment in equipment and the development of advanced data-processing techniques. Continuing efforts and development are still needed to make the HPIV technique to be a practical PIV technique for ¯uid ¯ow diagnostics. The 3D-PTV technique (Nishino et al. 1989; Virant & Dracos 1997; Suzuki 1999) always uses three cameras to record the positions of the tracer particles in the measurement volume from three different observation directions. Through 3-D image reconstruction, the locations of the tracer particles in the measurement volume are determined. By using particle-tracking operation, the 3-D displacements of the tracer particles are calculated. However, the particle-tracking method provides velocity vectors that are randomly distributed in space. Furthermore, most of the particle tracking algorithms rely on the assumption that nearest neighboring images belong to the same particles, and this is not valid if the particle image density becomes too high. So, the particle tracking methods are normally limited to relatively low particle image density. Hence, it always provides poor spatial resolution and the small-scale vortices and turbulent structures in the ¯ow ®eld cannot always be identi®ed successfully from the 3-D PTV results due to their poor spatial resolution. The stereoscopic PIV technique is a most straightforward and easily accomplished method for the measurement of the three velocity components in the illuminating laser sheet plane. It always uses two cameras at different view axes or offset distance to carry out stereoscopic image recording. By performing the view reconstruction, the corresponding image segments in the two views are matched to get three components of the ¯ow velocity vectors. Compared with the 3-D PTV method mentioned previously, the stereoscopic PIV measurement results have much higher in-plane spatial resolution, which can provide several thousand vectors in one plane similar to the conventional 2-D PIV measurement results. The time-resolved velocity ®eld of the PIV measurement results together with its derivatives can help us to understand the physics of ¯ows. However, the conventional stereoscopic PIV measurement results within one single plane often do not yield enough information to determine all velocity-based terms in the ¯uid governing equations (such as Navier±Stokes equations) that summarize our ¯uid-mechanical knowledge (Kaehler and Kompenhans 1999). For most vortex ¯ows, such as jet mixing ¯ows, the vorticity vector (all three components) ®eld is a very important quantity for evaluating the evolution and interaction of various vortices and the coherent structures in vortex ¯ows, besides the velocity ®elds. In the statistical theory of turbulence, the spatial and temporal correlation terms of ¯uid variables such as velocity, together with the spectra of the ¯uctuations, are very important for the development of turbulence models. Such information about the ¯uid ¯ows cannot always be obtained from the conventional stereoscopic PIV measurement results, which were obtained only at one single plane of the objective ¯uid ¯ow. In the present paper, the technical basis and system set-up of a dual-plane stereoscopic PIV system will be described, which can obtain the velocity (all three com- ponents) and the vorticity (all three components) ®elds of the ¯uid ¯ows at two spatially separated planes simultaneously and instantaneously. By adjusting the gap between the two illuminating laser sheets or/and the time interval between the light pulses properly, the distributions of various spatial or/and temporal correlation coef®cients of ¯ow variables can also be obtained from the measurement results of the present dual-plane stereoscopic PIV system. It should be mentioned that the present study uses the same polarization direction separation method as Kaehler and Kompenhans (1999) used to perform the scattered light separation. The optical arrangement of the illumination system and stereoscopic PIV image recording system of the present dual-plane stereoscopic PIV are also quite similar to the so-called ``multiple-plane stereo PIV system'' developed by Kaehler and Kompenhans (1999). In contrast to the 2-D calibration method used by Kaehler and Kompenhans (1999), a general 3-D in-situ calibration procedure (Soloff et al. 1997) was used in the present study to determine the relationships between the 3-D objective ®elds and the two-dimensional (2-D) image planes. For the 2-D calibration used by Kaehler and Kompenhans (1999), mapping functions are sought only to relate each 2-D image planes to the 2-D objective plane. For the velocity three-component reconstruction, the recording geometric quantities, such as separation between lenses, objective distance, the angular orientation of the camera axis to the object plane and so on, are still required as inputs explicitly in the reconstruction equations (Willert 1997). It should be noted that these quantities pertaining to the recording geometry may be dif®cult to measure accurately and may introduce errors. Furthermore, if recording is accomplished through a liquid±air interface, the reconstruction equations will need to be modi®ed to account for the refraction at the interface. The 3-D in-situ calibration method used in the present study can incorporate all the parameters of system geometry and optical arrangement automatically and do not need any explicit input for both position mapping and velocity three-component reconstruction. The present dual-plane stereoscopic PIV system was applied to conduct measurements in an air jet ¯ow exhausted from a lobed nozzle to demonstrate its feasibility. The evolution and interaction of various vortices in the lobed jet mixing ¯ow were revealed quantitatively and instantaneously from the measurement results. In order to evaluate the measurement accuracy level of the dual-plane stereoscopic PIV system, quantitative comparison of the measurement results of the present dual-plane stereoscopic PIV system with the simultaneous measurement results of a laser Doppler velocimetry (LDV) system was also conducted in the present study. 2 The technical basis and system set-up of the dual-plane stereoscopic PIV system 2.1 The methods for the scattered light separation It is obvious that the key point for the simultaneous stereoscopic PIV measurements at two spatially separated planes is to record the tracer particle images in each illuminated plane separately. Since the two measured planes are illuminated simultaneously, without any special arrangement, the scattered light from the two illuminated planes will be incident upon the same image recording camera simultaneously, which will blur the particle images and make simultaneous measurement impossible. In order to separate the scattered light into different components, two methods can be used, which are referred to as the color separation method and the polarization direction separation method. If the two measured planes are illuminated by using laser sheets with different colors (wavelengths), the scattered light of particles in the two laser light sheets can be separated successfully by using optical ®lters, which is transmissible for the desired color (wavelength). The polarization direction separation method is the method of illuminating the ¯ow ®eld by using laser sheets with orthogonal linear polarization directions. By using polarizing beam splitters, the scattered light from the tracer particles in the two laser light sheets can also be separated. In the color separation method, two kinds of lasers are always required to generate laser beams with different wavelengths or to make some optical arrangement modi®cations inside the laser head to generate different harmonic light from the same laser (such as a Nd:YAG laser) to illuminate the objective ¯ow ®eld. It should be noted that using different harmonic light from the same Nd:YAG laser always results in energy loss. Compared with the color separation method, the polarization direction separation method has the advantage of simple optical arrangement, which can be achieved easily by installing some optics outside the laser head. The polarized direction separation method was used in the present study, as in Kaehler and Kompenhans (1999), to perform the simultaneous stereoscopic PIV measurement at two spatially separated planes. 2.2 Illumination system Two sets of widely used double-pulsed Nd:YAG lasers (New Wave, 50 mJ/pulse) with additional optics were used in the present study to set up the illumination system of the present dual-plane stereoscopic PIV system. A schematic diagram and photograph of the illumination system are shown in Fig. 1. In order to indicate the linear polarization direction changing of the laser beams clearly, the optical arrangement inside the heads of the two double-pulsed Nd:YAG laser sets is also shown in the ®gure. Each of the two double-pulsed Nd:YAG laser sets is composed of two laser tubes with various optics installed in a laser head unit. The wavelength of the laser beams from laser tubes 1, 2, 3 and 4 is 1,064 nm (invisible infrared light), and the linear polarization direction of the laser beams is vertical (V). The vertically polarized laser beams from laser tube 2 and laser tube 4 are turn into horizontally polarized laser beams (H) by passing halfwave plate 5a and 5b shown in the Fig. 1. Then they are combined with the vertically polarized laser beams from laser tubes 1 and 3 through polarizers 7a and 7b. The horizontally polarized laser beams (P-polarized light) pass through polarizers 7a and 7b. While the vertically polarized light (S-polarized light) from laser tubes 1 and 3 is re¯ected by mirrors 6a and 6b to be incident upon polarizers 7a and 7b at the Brewster angle. The combined beams pass through half-wave plates 8a and 8b, then go into second harmonic generator (SHG) cells for polarization direction and wavelength adjustments. The laser beams out of the SHG cells have a wavelength of 532 nm (the second harmonic light of the fundamental wavelength 1,064 nm) and identical linear polarization direction (vertical direction). The vertically polarized laser beams from the doublepulsed Nd:YAG laser set B are turned into horizontally polarized light (P-polarized light) by passing half-wave plate 11 before they are combined with the laser beams from the double-pulsed Nd:YAG laser set A. The horizontal polarized laser beams (P-polarized light) transmit through the polarizer cube 13, while the vertical polarized light (S-polarized light) from the double-pulsed Nd:YAG laser set A is re¯ected by polarizer cube 13. By adjusting the angle and/or the location of mirror 12, the laser beams from laser set A and laser set B can be overlapped or not. Passing through cylindrical lens 14 and re¯ected by mirror 15, the laser beams are expanded into two paralleling laser sheets with orthogonal linear polarization to illuminate the studied ¯ow ®eld at two spatially separated planes or overlapped at one plane. 2.3 Image recording system In order to capture the PIV images simultaneously at two measurement planes illuminated by the above laser sheets with orthogonal linear polarization, two pairs of highresolution cross-correlation CCD cameras (1K ´ 1K, TSI PIVCAM 10-30) were used in the present study to perform stereoscopic PIV image recording. The two pairs of crosscorrelation cameras were settled on an optical table with a pair of polarizing beam-splitter cubes and two high-re¯ectivity mirrors installed in front of the cameras to separate the scattered light from the two illuminating laser sheets with orthogonal linear polarization. For the stereoscopic image recording, two basic approaches ± the lens translation method and the angular displacement method ± are commonly used. In the lens translation method, the image recording cameras are placed side by side with the image plane parallel to the object plane, while in the angular displacement method, the recording cameras view the same region of interest from an angle and the image planes are rotated with respect to the object plane. Detailed discussion about the two arrangement methods can be found in Willert (1997), Bjorkquist (1998), Poser et al. (1999) and Aikislar et al. (1999). The work described in the present paper takes advantage of the angular displacement method with the Scheimp¯ug condition (Prasad and Jensen 1995) to obtain focused particle images everywhere in the image plane. The distances between the illuminating laser sheets and image recording planes of the CCD camera are about 650 mm, and the angles between the view axials of the cameras are about 50°. The schematic diagram and the 279 280 Fig. 1. a The schematic diagram of the illumination system. b Photograph of the illumination system photograph of the image recording system for the present dual-plane stereoscopic PIV system are shown in Fig. 2. The illuminating laser sheets with orthogonal linear polarization are scattered by the tracer particles seeded in the objective ¯uid ¯ow. The scattered light from the horizontally polarized laser sheet (P-polarized light) will pass straight through the polarizing beam-splitter cubes and is detected by cameras 3 and 4. The scattered light from the vertically polarized laser sheet (S-polarized light) will emerge from the polarizing beam-splitter cubes at right angles to the incident direction. Before entering the lens of the cameras 1 and 2, the S-polarized light emerging from the polarizing beam-splitter cubes is re¯ected by two mirrors to achieve the identical orientation in all four image planes. Such an arrangement may simplify the matching of the four observation views and may save CPU 281 Fig. 2. a The schematic diagram of the image recording system. b Photograph of the image recording system time for the PIV image processing. In order to improve the image quality, the surface of each polarizing beam-splitter cube in which no light scattered by tracer particles and needed for PIV image recording enters or leaves is covered by light absorbing material. The host computer is composed of two high-speed CPU (450 MHz, Pentium III CPU), image memory (1 Gb RAM) and hard disk (100 Gb). It can acquire the continuous stereoscopic PIV image pairs up to 250 frames at a framing frequency of 15 Hz. 2.4 Synchronizer and host computer The above illumination system and image recording system are connected with a host computer via a synchronizer system (Fig. 2), which controls the timing of laser illumination and PIV image acquisition. The two double-pulsed Nd:YAG laser sets and the image recording camera pairs can be programmed to operate simultaneously or separately with desired time intervals. 2.5 Calibration procedure and image process Since the angular displacement method was used in the present study to do stereoscopic image recording, the magni®cation factors between the image planes and object plane are variable due to the perspective distortion. In order to determine the local magni®cation factors, a calibration procedure needs to be conducted to obtain the mapping functions between the image planes and object ¯ow ®elds. 282 Kaehler and Kompenhans (1999) and Kaehler (2000) used a 2-D calibration-based reconstruction method suggested by Willert (1997) to get the mapping function between the image plane and object plane in their ``multiple plane stereo PIV system''. As summarized by Prasad (2000), the 2-D calibration method can do position mapping between the image planes and the object plane without requiring any knowledge of the recording geometry. However, for the ®nal step of the velocity threecomponent reconstruction, the system geometric parameters, such as separation between lenses, objective distance, the angular orientation of the camera axis to the object plane and so on, are required as explicit inputs in the reconstruction equations given in Willert (1997). However, the quantities pertaining to the recording geometry may be dif®cult to measure accurately, and could introduce errors. Furthermore, if recording is accomplished through a liquid±air interface, the reconstruction equations may need to be modi®ed to account for refraction at the interface. Following the work of Soloff et al. (1997), a 3-D calibration procedure was conducted in the present study. The 3-D calibration procedure involved the acquisition of images of a calibration target plate, say a Cartesian grid of small dots, not only at one location as in the 2-D calibration method, but at several locations across the thickness of the laser sheets. Then these images were used to determine the magni®cation matrices of the image recording cameras. This technique, which determines the mapping functions between the 2-D image planes and 3-D object ®elds mathematically, therefore takes into account the various distorting in¯uences between the test section and the CCD arrays of the image recording cameras. Since the 3-D in-situ calibration method can incorporate all the parameters of system geometry and optical arrangement automatically, it does not need any explicit input for both position mapping and velocity three-component reconstruction. The general relationship between the 3-D object ®elds (x, y, z) and the 2-D image recording planes (X(1), Y(1)) and (X(2), Y(2)) is assumed to be described by a general mapping function: where c rFi;j c oFi c Fi;j oxj where i 1, 2 and j 1, 2, 3. Then, 1 0 0 1 1 1 1 1 F1;1 F1;2 F1;3 0 DX 1 1 C B B 1 1 1 C Dx1 B 1 C B C F F F B DX2 C B 2;1 2;2 2;3 C@ A C B 2 2 2 C Dx2 B DX 2 C B F F F @ A 1;1 1;2 1;3 @ 1 A Dx3 2 2 2 2 F2;1 F2;2 F2;3 DX 4 5 2 The required 3-D displacements are determined from this ®nal expression. It should be noted that the above expression provides four equations for three unknowns, which can be solved by using a least-squares approach (Soloff et al. 1997). To accomplish this in the present study, a target plate (100 mm ´ 100 mm) with 100-lm-diameter dots spaced at intervals of 2.5 mm was used for the in-situ calibration. The front surface of the target plate was aligned with the center of the laser sheet and then calibration images were obtained at three locations across the depth of the laser sheets. The space interval between these locations was 0.5 mm for the present study. The mapping function used in the present study was taken to be a multidimensional polynomial, which is fourth order for the directions paralleling the laser sheet plane and second order for the direction normal to the laser sheet plane, and expressed as: F x; y; z a0 a1 x a2 y a3 z a4 x2 a5 xy a6 y2 a7 xz a8 yz a9 z2 a10 x3 a11 x2 y a12 xy2 a13 y3 a14 x2 z a15 xyz a16 y2 z a17 xz2 a18 yz2 a19 x4 a20 x3 y a21 x2 z2 a22 x1 y3 a23 y4 a24 x3 z a25 x2 yz a26 xy2 z a27 y3 z a28 x2 z2 a29 xyz2 a30 y2 z2 6 The 31 coef®cients a0 to a31 were determined from the calibration images by using the least squares method (Watanabe et al. 1989). The x, y directions are in the plane where c 1,2 for the left and right image recording parallel to the laser sheet plane, while the z direction is camera, and i 1,2,3 for the x, y, z directions in the normal to the laser sheet plane. objective ®eld. The 2-D particle image displacements in every image The particle image displacement in each image planes were calculated separately by using a hierarchical recording planes can be given by recursive PIV (HR-PIV) software (Hu et al. 2000b) develDX c F c x Dx F c x 2 oped by our research laboratory. The HR-PIV software is based on the hierarchical recursive processes of normal Performing a Taylor series expansion of above equation spatial correlation operation with offsetting of the disand volume averaging over the interrogation cell, the ®rst- placement estimated by the former iteration step and hiorder relationship between an image plane displacement erarchical reduction of the interrogation window size and c on camera c, DXi and object plane displacement, Dxj can search distance in the next iteration step. The multiplecorrelation validation technique (Hart 1998) and sub-pixel be expressed as interpolation with 2-D Gaussian ®t curve (Hu et al. 1998) have also been incorporated in the software. Compared c c DXi rFi;j xDxj 3 with the conventional cross-correlation based PIV image X c F c xi 1 processing method, the hierarchical recursive PIV method has the advantages in spurious vector suppression and spatial resolution improvement of the PIV results. Finally, by using the mapping functions de®ned in Eq. (6) and the 2-D displacements in the two image planes, the three components of the velocity vectors in the objective planes were reconstructed by solving the equations given in Eq. (5). 3 Lobed jet mixing flow and experimental apparatus In order to demonstrate its feasibility, the present dualplane stereoscopic PIV system was used to conduct measurement in an air jet mixing ¯ow exhausted from a lobed nozzle. A lobed nozzle, which consists of a splitter plate with convoluted trailing edge, is considered to be a very promising ¯uid mechanic device for ef®cient mixing of two co-¯ow streams with different velocity, temperature and/or species (McCormick and Bennett 1994; Belovich and Samimy 1997). Lobed nozzles have been given a great deal of attention by many researchers in recent years, and have also been widely applied to aerospace engineering. For example, for some commercial aero-engines, lobed nozzles have been used to reduce both take-off jet noise and speci®c fuel consumption (SFC) (Presz et al. 1994). In order to reduce the infrared radiation signals of the military aircraft, lobed nozzles have also been used to enhance the mixing process of the high temperature and highspeed gas plume from aero-engines with ambient cold air (Hu et al. 1999). More recently, lobed nozzles have also emerged as attractive approaches for enhancing mixing between fuel and air in combustion chambers to improve the ef®ciency of combustion and reduce the formation of pollutants (Smith et al. 1997). The interaction of the streamwise vortices generated by lobed nozzles and spanwise vortices rolled up due to the Kelvin±Helmholtz instability has been suggested to pay a important role in mixing enhancement in lobed mixing ¯ows (McCormich and Bennett 1994; Belovich and Samimy 1997). However, most of the previous work on lobed mixing ¯ows was conducted using pitot probes, LDV or a hot ®lm anemometer (HFA). Due to the limitation of those conventional measurement techniques, the quantitative whole-®eld velocity and vorticity distributions in lobed mixing ¯ows have never been obtained until the recent work of the authors (Hu et al. 2000a, c). In the earlier work of the authors (Hu et al. 2000a, c), both planar laser induced ¯uorescence (LIF) and PIV techniques were used to study lobed jet mixing ¯ows in a water channel. By using the directly perceived LIF ¯ow visualization images and quantitative velocity, vorticity and turbulence intensity distributions of PIV measurement results, the evolution and interaction characteristics of the various vortical and turbulent structures in the lobed jet mixing ¯ows were discussed. Since the PIV measurement results reported in the earlier work of the authors was obtained by using a conventional 2-D PIV system, it only provided the two components of the velocity vectors in the plane of the laser sheet and one component of the vorticity vector normal to Fig. 3. a The test lobed nozzle used in the present study. b Experimental rig used in the present study 283 284 the laser sheet plane. The measurement results obtained by the present dual-plane stereoscopic PIV system are likely to be the ®rst to provide all three components of the velocity and vorticity ®elds of the lobed jet mixing ¯ows instantaneously and simultaneously. Figure 3a shows the geometry parameters of the lobed nozzle used in the present study. The lobed nozzle has six lobes. The width of each lobe is 6 mm and the height of each lobe is 15 mm (H 15 mm). The inner and outer penetration angles of the lobed structures are about 22° and 14° respectively. The diameter D of the lobed nozzles is 40 mm. Figure 3b shows the jet ¯ow experimental rig used in the present study. The air jet was supplied by a centrifugal compressor. A cylindrical plenum chamber with honeycomb structures in it was used for settling the air¯ow. Through a convergent connection (convergent ratio is about 50:1), the air¯ow is exhausted from the test nozzle. All the jet supply apparatus was installed on a 2D translation mechanism so that the distance between the exit plane of the lobed nozzle and the illuminating laser sheets could be changed by operating the 2-D translation mechanism. The illumination system and image recording system were ®xed during the experiment. The measurements for the different cross planes of the lobed jet mixing ¯ow were achieved by changing the positions of the lobed nozzle. Therefore, all the measurements can be conducted by doing the in-situ calibration procedure only once. The velocity of the air jet exhausting from the test nozzle was adjustable. In the present study, the jet velocity (U0) was set at about 20 m/s. The Reynolds number of the jet ¯ow, based on the lobed nozzle diameter (D) and the jet velocity was about 60,000. The thickness of the illuminating laser sheets was about 2.0 mm, and the time interval between the two laser pulsed illumination of each double pulsed Nd:YAG laser set was settled as 30 ls. A seeding generator, which is composed by an air compressor and several Laskin nozzles (Melling 1997), was used to generate 1-lm DEHS (di-2-ethlhexyl-sebact) droplets as tracer particles in the jet mixing ¯ow. The seeding DEHS droplet ¯ow from the seeding generator were divided into two streams; one is used to seed the core jet ¯ow and another for the ambient air seeding. Fig. 4a±d. The simultaneous images acquired by the four cameras when the ¯ow ®eld was illuminated by using a vertically polarized laser sheet (S-polarized light): a camera 1; b camera 2; c camera 3; d camera 4 4 Experimental results and discussions 4.1 The separation result of the scattered light from the two orthogonally linearly polarized laser sheets Since the separation result of the scattered light from the two illuminating laser sheets with orthogonal linear polarization is directly related to the possibility of the simultaneous measurements and the measurement accuracy of the simultaneous measurement results, a test was conducted in the present study to check the separation result of the scattered light from the two illuminating laser sheets with orthogonal linear polarization. In order to show the separation results more clearly, only the core jet ¯ow was Fig. 5a±d. The simultaneous images acquired by the four cameras when the ¯ow ®eld was illuminated by using a horizontally polarized laser sheet (P-polarized light): a camera 1; b camera 2; c camera 3; d camera 4 seeded with DEHS droplets. The double-pulsed Nd:YAG laser sets A and B were controlled to ®re separately, and the four CCD cameras acquired the same particle images simultaneously. When the double-pulsed Nd:YAG laser set A was controlled to ®re, the ¯ow ®eld was illuminated by a the special trailing edge of the lobed nozzle can be seen clearly in the instantaneous streamwise vorticity distribution shown in Fig. 6e. The x and y components of the vorticity vectors were used to calculate the in-plane vorticity strength distribution (Fig. 6f), which can indicate the behaviors of the spanwise vortices in the lobed jet mixing ¯ow. It can be seen that the shape of the spanwise vortex ring at the lobed nozzle exit has the same geometry as the trailing edge of the lobed nozzle. The lobed jet mixing ¯ow was found to be much more turbulent further downstream (Z 40 mm, Fig. 7). Instead of the six pairs of large-scale streamwise vortices shown clearly at the exit plane of the lobed nozzle (Fig. 6e), many small-scale streamwise vortices were found to appear in the lobed jet mixing ¯ow at this cross plane (Fig. 7e). The big spanwise vortex ring (in-plane vortex ring shown in Fig. 6f) was also found to begin to break down into many disconnected vortical tubes (Fig. 7f). The ensemble-averaged results based on the 200 frames of instantaneous measurement results of the lobed jet mixing ¯ow at Z 40 mm cross plane are shown in Figure 8a, and Fig. 8b shows the ensemble-averaged ve4.2 locity distribution (U, V and W) and turbulent kinetic The simultaneous measurement at two spatially energy (k) distribution, which is calculated by using folseparated planes As described previously, by adjusting the location or angle lowing equations: of the mirror in front of the double-pulsed laser set A N N N 1X 1X 1X (Fig. 1), the gap between the two paralleling laser sheets U ut ; V vt ; W wt 10 can be changed. Typical instantaneous measurement reN t1 N t1 N t1 sults obtained by the present dual-plane stereoscopic PIV 1 system at cross planes of the lobed jet mixing ¯ow are k rms u0 2 rms v0 2 rms w0 2 2" shown in Figs. 6 and 7, with a gap between the centers of N N the two illuminating laser light sheets of 2 mm. 1 1X 1X ut U2 vt V2 From the measurement results shown in Fig. 6, it can be 2 N N t1 t1 seen that the instantaneous velocity distribution of the # lobed jet was found to have the same shape as the lobed N X 1 nozzle geometry at the exit of the lobed nozzle 11 wt W2 N t1 (Z 10 mm). Based on the two simultaneous velocity ®elds, all three components of the instantaneous vorticity where u¢, v¢ and w¢ are turbulent velocities in the X, Y and vectors were calculated using the following equations: Z directions, and N 200 is the frame number. D ow ov The ensemble-averaged in-plane vorticity strength and 7 -x streamwise vorticity are also shown in Fig. 8c and d. It U0 oy oz should be noted the maximum magnitudes of the ensemD ou ow 8 ble-averaged vorticity [both streamwise vorticity and in-y U0 oz ox plane (spanwise) vorticity distribution] are much smaller than that of the instantaneous values due to the extensive D ov ou 9 mixing in the lobed jet mixing ¯ow. Meanwhile, the pin-z U0 ox oy ched-off shape of the spanwise vortex tube suggested by where D is the diameter of the lobed nozzle, and U0 is the McCormick and Bennett (1994) can also be found from velocity of the jet ¯ow at the test nozzle inlet, while, u, v Fig. 8c. and w are the instantaneous velocity in the X, Y and Z It is well known that the cross-correlation coef®cients of directions (Fig. 3). various ¯ow variables are very meaningful in statistical The instantaneous distributions of the three vorticity turbulence theory. Such values cannot be obtained by vector components at Z 10 mm cross plane of the lobed using conventional stereoscopic PIV systems, which projet ¯ow are shown in Fig. 6c±e. It should be noted that vide measurement results only at a single plane. The enconventional 2-D PIV systems and one-plane stereoscopic semble-averaged cross-correlation coef®cients of turbulent PIV systems only can provide the normal component velocity vectors and streamwise vorticity at the distribution of the vorticity vectors (-z ) instantaneously. Z 40 mm cross plane of the lobed jet mixing ¯ow are For the various vortices in the lobed jet mixing ¯ow, the shown in Fig. 8e and f. These cross-correlation coef®cients six pairs of large-scale streamwise vortices generated by are de®ned as: vertically polarized laser sheet (S-polarized light). The simultaneous images detected by the four CCD cameras are shown in Fig. 4. When the double-pulsed Nd:YAG laser set B was controlled to ®re, the ¯ow ®eld was illuminated by a horizontally polarized light sheet (P-polarized light). The simultaneous particle images detected by the four CCD cameras are shown in Fig. 5. From the comparison of the simultaneous images shown in Figs. 4 and 5, it can be seen that the scattered light from the illuminating laser sheets with orthogonal linear polarization can be separated successfully by using the optical arrangement described in the present paper. The separation ratio of the scattered light, which is de®ned as the power ratio of the horizontally polarized light (P-light) transmitted through the polarizing beam-splitter cube to the part re¯ected by the polarized interface of the polarizer cubes or the power ratio of the vertically polarized light (S-light) re¯ected from the polarizer cubes to the part transmitted through the polarizer cubes, was measured by using a laser power meter. The value is found to be about 100:1. 285 286 Fig. 6a±f. The typical instantaneous measurement results of the dual-plane stereoscopic PIV system at the Z 10 mm and Z 12 mm cross planes of the lobed jet mixing ¯ow: a instantaneous result at Z 10 mm cross plane; b simultaneous velocity ®eld at Z 12 mm cross plane; c instantaneous vorticity ®eld (X component); d instantaneous vorticity ®eld (Y component); e instantaneous vorticity ®eld (Z component); f strength of in-plane vorticity distribution 287 Fig. 7a±f. The typical instantaneous measurement results of the dual-plane stereoscopic PIV system at Z 40 mm and Z 42 mm cross planes of the lobed jet mixing ¯ow: a instantaneous velocity ®eld at Z 40 mm cross plane; b simultaneous velocity ®eld at Z 42 mm cross plane; c instantaneous vorticity ®eld (X component); d instantaneous vorticity ®eld (Y component); e instantaneous vorticity ®eld (Z component); f strength of in-plane vorticity distribution 288 Fig. 8a±f. The ensemble-averaged values of the dual-plane stereoscopic PIV measurement results at Z 40 mm cross plane of the lobed mixing ¯ow: a ensemble-averaged velocity distribution; b ensemble-averaged turbulent kinetic energy distribution; c ensemble-averaged in-plane vorticity strength distribution; d ensemble-averaged streamwise vorticity distribution; e crosscorrelation coef®cients of turbulent velocity vectors; f crosscorrelation of streamwise vorticity R u0 ; v0 ; w0 tN 1X fu0 x; y; 40; t u0 x; y; 42; t v0 x; y; 40; t v0 x; y; 42; t w0 x; y; 40; t w0 x; y; 42; tg N t 8 9 u x; y; 40; t U x; y; 40 u x; y; 42; t U x; y; 42 > > tN < = 1X v x; y; 40; t V x; y; 40 v x; y; 42; t V x; y; 42 12 > N t > : ; w x; y; 40; t W x; y; 40 w x; y; 42; t W x; y; 42 Cross Cross R -z tN 1X -z x; y; 40; t -z x; y; 42; t N t1 13 By changing the gap between the two illuminating laser sheets, the spectrum pro®les of the cross-correlation coef®cients of these ¯ow variables can be obtained. 4.3 The auto-correlation coefficient measurement with two illuminating laser sheets overlapped at the same plane The temporal resolution of conventional PIV systems is limited to the framing rate of the cameras used for PIV image recording. This limitation is much more serious for the PIV systems with high-resolution digital cameras. For example, the frame rate of a 1K ´ 1K-pixel camera is always about 15 Hz and much lower for the cameras with higher resolution. A conventional PIV system is typically insuf®cient to record time sequences in rapidly evolving or turbulent ¯ows. Therefore, only time-averaged quantities, such as the mean velocity and Reynolds stress, can be obtained to characterize the ¯ow unsteadiness. In order to improve the temporal resolution of the PIV results, several techniques have been proposed in recent years (Lecordier and Trinite 1999; Whybrew et al. 1999; Zhang 1999). The dual-plane stereoscopic PIV system described in the present paper provides a new method of overcoming the limitation of the slow framing rate of the image recording camera to improve the temporal resolution of the PIV results. By adjusting the two illuminating laser sheets to overlap at the same plane, the ¯ow ®eld can be measured synchronously at variable separation times up to microsecond order. The temporal auto-correlation functions of the ¯ow variables (such as velocity and vorticity) can be obtained by measuring the velocity ®eld at time t and t + s, where s is varied to any delay amount. Figure 9a and b shows the instantaneous measurement results of the present dual-plane stereoscopic PIV system at the same cross plane (Z 40 mm) of the lobed jet mixing ¯ow, with a time delay (s) between two measurements of 100 ls. The streamwise vorticity ®elds derived from the two instantaneous velocity ®elds are given in Fig. 9c and d. Following the de®nition of Lourenco et al. (1998), the ensemble-averaged auto-correlation coef®cient of the ¯ow variable X is calculated by using following equation: N 1 1X Auto R X Xn x; y; z; t Xn x; y; z; t s N n0 14 where N is the repeated number of the individual measurement, and N 200 in the present paper. The auto-correlation values of the ¯ow ®eld parameters (such as velocity and vorticity) are the functions of the variable lag s. The ensemble-averaged auto-correlation coef®cient of the turbulent velocity vectors and the streamwise vorticity are shown in Fig. 9e andf with s 100 ls. By changing the time delay between the two measurements, the auto-correlation spectrum of these ¯ow variables can be obtained. 4.4 The comparison of the simultaneous measurement results of the present dual-plane stereoscopic PIV system with LDV measurement results For the accurate evaluation of a stereoscopic PIV system, Lawson and Wu (1997a, b) introduced a geometric error model for the error analysis of stereoscopic PIV systems based on the parallel projection assumption. The effect of system parameters such as the position and view angle of the image recording cameras on the error ratio of stereoscopic PIV results, which was de®ned as the ratio of the out-of-plane velocity component to the in-plane component, was discussed theoretically. Bjorkquist (1998) discussed the measurement accuracy of his stereoscopic PIV system by measuring the parallel translation movement of a rigid body. It should be noted that, since the movements in ¯uid ¯ow include not only parallel translation but also rotation and shear motion, the discussion based only on the parallel translation measurement of a rigid body is not suf®cient for the accurate evaluation of a stereoscopic PIV system for ¯uid ¯ow measurement. Hill et al. (1999) compared the ensemble-averaged values of their stereoscopic PIV measurement results in a cylindrical Couette ¯ow with theoretical predictions and reported that the differences between their stereoscopic PIV measurement results and theoretical values is less than 1%. Abe et al. (2000) evaluated their stereoscopic PIV system by comparing the stereoscopic PIV measurement results with a conventional 2-D PIV system. In the present paper, the measurement results of the dual-plane stereoscopic PIV system were compared with the simultaneous measurement results of a LDV system. Both the instantaneous data and ensemble-averaged values of the stereoscopic PIV measurement and LDV measurement were compared quantitatively to evaluate the accuracy level of the present dual-plane stereoscopic PIV system. The LDV system used in the present study is a 2-D system, composed of an argon laser (1.5 W), a LDV optical 289 290 Fig. 9a±f. The measurement results of the dual-plane stereoscopic PIV system at same cross plane (Z 40 mm plane) of the lobed jet mixing ¯ow with 0.1 ms delay between the two measurements: a instantaneous velocity ®eld at time t T0; b instantaneous velocity ®eld at time t T0 + 0.1 ms; c stream- wise vorticity distribution at time t T0; d streamwise vorticity distribution at time t T0 + 0.1 ms; e auto-correlation coef®cients of turbulent velocity vectors; f auto-correlation coef®cients of streamwise vorticity Fig. 10. The schematic set-up for the LDV and dual-plane stereoscopic PIV simultaneous measurement unit (TSI TRCF2), a signal processing system (TSI IFA750) and a synchronizer control system (TSI Datalink DL4). In order to achieve the simultaneous measurement with the dual-plane stereoscopic PIV system, the synchronizer of the LDV system was connected to the synchronizer system of the present dual-plane stereoscopic PIV system. The pulsed signals generated by the stereoscopic PIV synchronizer system, which were used to trigger the illumination system and image recording system for stereoscopic PIV measurement, were also output to the synchronizer of the LDV system for LDV measurement. Figure 10 shows the system set-up for the LDV and dualplane stereoscopic PIV simultaneous measurement schematically. Two pairs of laser beams (green and blue beams) were used to conduct the LDV measurements. The wavelength of the green beams of the LDV system is 488 nm and of the blue beams 545.5 nm. In order to avoid the effect of the LDV laser beams on the image recording of the dual-plane stereoscopic PIV system, sharp band pass ®lters (only 532 nm pass) were installed in the heads of the CCD cameras of the dual-plane stereoscopic PIV system. Before conducting the quantitative comparison of the stereoscopic PIV measurement results with LDV simultaneous measurement results, both the spatial resolution and temporal resolution of the two systems should be discussed. Since the stereoscopic PIV system and the LDV system were operated in simultaneous measurement mode, which was controlled by the synchronizer system of the stereoscopic PIV system, the temporal resolution of the LDV measurement and stereoscopic PIV measurement is the same. As mentioned above, the thickness of the illuminating laser sheets of the present dual-plane stereoscopic PIV system is about 2.0 mm and 32 ´ 32-pixel interrogation windows were used to conduct cross-correlation PIV image processing. The image resolution captured by the image recording cameras is about 80 lm/ pixel. So, the spatial resolution of the present stereoscopic PIV measurement is about 2.5 mm ´ 2.5 mm ´ 2.0 mm. The spatial-resolution of a LDV system is closely related to the diameter of the laser beams for the LDV measurement. For the present LDV system, the spatial-resolution is about 65.3 lm (laser beam diameter and also volume diameter) ´ 0.68 mm (volume length). The spatial resolution difference between the stereoscopic PIV system and the LDV system may result in Fig. 11a, b. The instantaneous data of the simultaneous measurement results at comparison point B (0,0,40) obtained by the dual-plane stereoscopic PIV system and the LDV system: a one laser sheet on and the other off; b two laser sheets illuminate the ¯ow ®eld simultaneously 291 Table 1. The comparison of the ensemble-averaged values of the stereoscopic PIV measurement results with LDV results Stereoscopic PIV measurement results LDV measurement results Ensemble-averaged out-of-plane velocity W (m/s) Deviation of the out-of-plane velocity component STD (W) Ensembleaveraged out-ofplane velocity W (m/s) Deviation of the out-of-plane velocity component STD (W) WSPIV±WLDV One laser sheet on the other off Point A (0,0,20) Point B (0,0,40) 17.271 0.600 16.973 0.640 0.298 (1.7%) 17.220 0.889 16.930 0.844 0.290 (1.7%) Two laser sheets on simultaneously Point A (0,0,20) Point B (0,0,40) 17.126 0.581 16.904 0.509 0.222 (1.3%) 17.213 1.006 16.864 0.856 0.349 (2.0%) 292 differences between the stereoscopic PIV measurement results and LDV measurement results since the cut-off scale of the turbulent motion is different. However, the effect of the spatial resolution difference between the stereoscopic PIV system and LDV system is consider to be negligible in the present study, since the comparison points are selected on the centerline of the lobed jet ¯ow [point A(0,0,20) and point B(0,0,40)]. Two steps of the comparison test were conducted in the present paper. First, only one of the double-pulsed Nd:YAG laser sets was controlled to ®re; the dual-plane stereoscopic PIV system works as a conventional singleplane stereoscopic PIV system. The instantaneous values of the simultaneous measurements from the dual-plane stereoscopic PIV system and the LDV system are shown in Fig. 11a. Then, both of the double pulsed laser sets were controlled to ®re simultaneously; the comparison of the simultaneous measurement results is shown in Fig. 11b. Based on the 200 instantaneous data of the simultaneous measurements, the ensemble-averaged values and deviation of the out-of-plane velocity component are listed in Table 1. It can be seen that, the simultaneous measurement results of the stereoscopic PIV system and LDV system agree well with each other for both the instantaneous data and ensemble-averaged values. For the ensemble-averaged values of the out-of plane velocity component, the difference between the stereoscopic PIV measurement and LDV measurement was found to be less than 2%. Since the scattered light from the two orthogonally linearly polarized laser sheets was separated successfully, the measurement accuracy of the dual-plane stereoscopic system was not affected by the simultaneous illumination of the two laser sheets. laser sheets to illuminate the ¯uid ¯ow at two spatially separated planes simultaneously. The scattered light from the illuminated particles with orthogonal linear polarization was recorded separately by high-resolution CCD cameras with polarizing beam-splitter cubes. Unlike conventional single-plane PIV systems, which can only obtain one component of the vorticity vectors instantaneously, the present dual-plane stereoscopic PIV system can provide all three components of the vorticity vectors and various auto-correlation and cross-correlation coef®cients of ¯ow variables instantaneously and simultaneously. The present dual-plane stereoscopic PIV system was used to conduct measurement in an air jet ¯ow exhausted from a lobed nozzle to demonstrate its feasibility. The evolution and interaction of the various vortices in the lobed jet mixing ¯ow were visualized quantitatively and instantaneously from the measurement results of the present dual-plane stereoscopic PIV system. In order to evaluate its measurement accuracy, the measurement results of the present dual-plane stereoscopic PIV system were compared with the simultaneous measurement results of a LDV system. It was found that both the instantaneous data and ensemble-averaged values of the simultaneous measurement results agree well with each other. For the ensemble-averaged values of the out-of plane velocity component at comparison points, the difference between the stereoscopic PIV and LDV measurement results was found to be less than 2%. References Abe M; Longmire EK; Hishida K; Maeda M (2000) A comparison of 2D and 3D measurements in an oblique jet. J Visualiz 3(2) Aikislar MB; Lourenco L; Krothapalli A (1999) 3-D PIV mea5 surements of a supersonic jet. In: Proceedings of the 3rd International Workshop on PIV, Santa Barbara, 16±18 September Summary Barnhart DH; Adrian RJ; Papen GC (1994) Phase-conjugate hoThe technical basis and system set-up of a dual-plane lographic system for high-resolution particle image velocimestereoscopic PIV system, which can provide ¯ow velocity try. Appl Opt 33: 7159±7170 (all three components) ®elds at two spatially separated Bjorkquist DC (1998) Design and calibration of a stereoscopic planes simultaneously or separated in time, were PIV system. In: Proceedings of the Ninth International Symdescribed. The simultaneous measurement were achieved posium on Application of Laser Techniques in Fluid Mechanby using two pairs of orthogonally linearly polarized ics, Lisbon, Portugal Belovich VM; Samimy M (l997) Mixing process in a coaxial geometry with a central lobed mixing nozzle. AIAA J 35: 838±84l Hart DP (1998) The elimination of correlation error in PIV processing. In: Proceedings of the Ninth International Symposium on Application of Laser Techniques in Fluid Mechanics, Lisbon, Portugal Hill DF; Sharp KV; Adrian RJ (1999) The implementation of distortion compensated stereoscopic PIV.In: Proceedings of the 3rd International Workshop on PIV, Santa Barbara, 16±18 September 1999 Hu H; Saga T; Kobayashi T; Taniguchi N; Okamoto K (1998) Evaluation the cross-correlation method by using PIV standard image. J Visualization 1: 87±94 Hu H; Saga T; Kobayashi T; Taniguchi N; Liu H; Wu S (1999) Research on the rectangular lobed exhaust ejector/mixer systems. Trans Jpn Soc Aeronaut Space Sci 41(134): 187±194 Hu H; Saga T; Kobayashi T (2000a) Research on the vortical and turbulent structures in the lobed jet ¯ow by using LIF and PIV. Meas Sci Technol 11: 698±711 Hu H; Saga T; Kobayashi T; Taniguchi N; Segawa S (2000b) The spatial resolution improvement of PIV result by using hierarchical recursive operation. Paper presented at the 9th International Symposium on Flow Visualization, Edinburgh, Scotland, 22±25 August Hu H; Kobayashi T; Saga T; Taniguchi N (2000c) PIV and LIF measurements on the lobed jet mixing ¯ows. Exp Fluids 29: S141±S157 Kaehler CJ (2000) Multiple stereo PIV- recording and evaluation methods. In: Proceedings of EUROMECH 411, Rouen, France, 29±31 May Kaehler CJ; Kompenhans J (1999) Multiple plane stereo PIV: technical realization and ¯uid-mechanical signi®cance. In: Proceedings of the 3rd International Workshop on PIV, Santa Barbara, 16±18 September Lawson NJ; Wu J (1997a) Three-dimensional particle image velocimentry: error analysis of stereoscopic techniques. Meas Sci Technol 8: 894±900 Lawson NJ; Wu J (1997b) Three dimensional particle image velocimentry: experimental error analysis of a digital angular stereoscopic system. Meas Sci Technol 8: 1455±1464 Locordier B; Trinite M (1999) Time resolved PIV measurements for high speed ¯ows. In: Proceedings of the 3rd International Workshop on PIV, Santa Barbara, 16±18 September Lourenco LM; Alkislar MB; Sen R (1998) Measurement of velocity ®eld spectra by means of PIV. In: Proceedings of the Ninth International Symposium on Application of Laser Techniques in Fluid Mechanics, Lisbon, Portugal, 13±16 July Melling A (1997) Tracer particles and seeding for particle image velocimetry. Meas Sci Technol 8: 1406±1416 McCormick DC; Bennett JC Jr (l994) Vortical and turbulent structure of a lobed mixer free shear layer. AIAA J 32: 1852± 1859 Nishino K, Kasagi N; Hirata M (1989) Three dimensional particle tracking velocimetry based on automated digital image processing. J Fluid Eng 111: 384±391 Poser JD; Riethmuller ML (1999) Translation stereoscopic digital piv applied to a turbulent jet. In: Proceedings of the 3rd International Workshop on PIV, Santa Barbara, 16±18 September Prasad AK (2000) Stereoscopic particle image velocimetry. Exp Flows 29: 103±116 Prasad AK; Adrian RJ (1993) Stereoscopic particle image velocimetry applied to ¯uid ¯ows. Exp Flows 15: 49±60 Prasad AK; Jensen K (1995) Scheimp¯ug stereocamera for particle image velocimetry in liquid ¯ows. Appl Opt 34: 7092±7099 Presz WM Jr; Reynolds G; McCormick D (1994) Thrust augmentation using mixer±ejector±diffuser systems. AIAA Paper 94-0020 Smith LL; Majamak AJ; Lam IT; Delabroy O; Karagozian AR; Marble FE; Smith OI (l997) Mixing enhancement in a lobed injector. Phys Fluids 9: 667±678 Soloff SM; Adrian RJ; Liu ZC (1997) Distortion compensation for generalized stereoscopic particle image velocimetry. Meas Sci Technol 8: 1441±1454 Suzuki Y (1999) Three-dimensional particle tracking velocimetry. In: The textbook of the seminar about three-dimensional PIV technique, VSJ-PIV-S2. Visualization Society of Japan, Yokohama, Japan, pp 79±96 (in Japanese) Virant M; Dracos T (1997) 3D PTV and its application on Lagrangian motion. Meas Sci Technol 8: 1539±1552 Watanabe Z; Natori M; Okkuni Z (1989) Fortran 77 software for numerical computation. Maruzen, Japan (in Japanese) Whybrew A; Reeves M; Slagle R; Boaler J; Baughan A; Nicholls T; Tower D; Tavender B; Buckberry C (1999) Two technqiues for all digital time-resolved PIV. In: Proceedings of the 3rd International Workshop on PIV, Santa Barbara, 16±18 September Willert C (1997) Stereoscopic digital particle image velocimetry for application in wind tunnel ¯ows. Meas Sci Technol 8: 1465± 1479 Zhang J; Tao B; Katz J (1997) Turbulent ¯ow measurement in a square duct with hybrid holographic PIV. Exp Fluids 23: 373±381 Zhang Y (1999) TPIV visualization of nozzle ¯ow characteristics of impinging reacting jets. In: Proceedings of the 3rd International Workshop on PIV, Santa Barbara, 16±18 September 293