Principle of Virtual Work for Trusses
advertisement

Principle of Virtual Work for Trusses
A truss is like a series of interconnected springs in 2-D since the force in
each
hb
bar iis along
l
th
the axis
i off th
the b
bar , causing
i each
hb
bar tto extend
t d or
compress, just like a spring. The spring constant, k, for a bar is given by
EA
k=
L
E is the Young's modulus for the bar ( a material property) given in GPa
(GigaPascals) in the SI system, where 1 Pa = 1 Newton/m2.
For example,
example for steel
steel, E = 210 GPa
GPa=210x10
210x109 Pa
A is the cross-sectional area of the bar (in m2)
L is the length of the bar (in m2)
In the English system E is measured in psi =lb/in2, A is measured in in2 , and L is
measured in inches
inches. For steel
steel, E = 30x106 psi.
psi
One difference between a truss and our previous 1-D spring
examples is that the displacements at the ends of each bar are all in
different directions
We need to place all of these displacements in the same "global"
coordinate system along the x- and y-axes
Utj
t
s
Usjj
Uyj
jth node
Uxj
Uti
Usi
θ
Uyi
θ
x
ith node
x
Uxi
θ is the angle that the bar makes with the
positive x-axis
x axis
t
s
Utj
Usj
Fsj
Uti
Usi
θ
Fsi
In the s-t coordinates we have the stiffness matrix for each element (bar):
⎧ Fsi ⎫ ⎡ k
⎪F ⎪ ⎢
⎪ ti ⎪ ⎢ 0
⎨ ⎬=
⎪ Fsj ⎪ ⎢ −k
⎪⎩ Ftj ⎪⎭ ⎣⎢ 0
0 −k
0
0
0
0
k
0
0 ⎤ ⎧U si ⎫
⎪ ⎪
0 ⎥⎥ ⎪U ti ⎪
⎨ ⎬
0 ⎥ ⎪U sj ⎪
⎥
0 ⎦ ⎪⎩U tj ⎪⎭
Fsi = k (U si − U sj )
which is the
same as
Fti = 0
Fsj = k (U sj − U si )
Ftj = 0
⎧ Fsi ⎫ ⎡ k
⎪F ⎪ ⎢
⎪ ti ⎪ ⎢ 0
⎨ ⎬=
⎪ Fsj ⎪ ⎢ − k
⎪⎩ Ftj ⎪⎭ ⎢⎣ 0
0 −k
0
0
0
0
k
0
0 ⎤ ⎧U si ⎫
⎪ ⎪
0 ⎥⎥ ⎪U ti ⎪
⎨ ⎬
0 ⎥ ⎪U sj ⎪
⎥
0 ⎦ ⎪⎩U tj ⎪⎭
again this relationship simply comes from the virtual work principle
δ W = Fsiδ U si + Ftiδ U ti + Fsjδ U sj + Ftjδ U tj
2⎤
⎡1
= δ E = δ ⎢ k (U sj − U si ) ⎥
⎣2
⎦
= k (U sj − U si )(δ U sj − δ U si )
Fsi = k (U si − U sj )
Fti = 0
Fsj = k (U sj − U si )
Ftj = 0
We need to transform the stiffness matrix below, which is given in the s-t
coordinates to one given in the global x-y coordinates
coordinates,
⎡k
⎢0
% ⎤=⎢
⎡⎣K
e⎦
⎢ −k
⎢
⎣0
0 −k
0 0
0
0
k
0
0⎤
0 ⎥⎥
0⎥
⎥
0⎦
The easiest way to do this is to note that the strain energy of each element (bar )
can also be written as
{ }
1 %
E= U
2
T
{ }
% ⎤ U
% = 1 {U U U
⎡⎣K
e⎦
si
ti
sj
2
2
1
= k (U sj − U si )
2
⎡k
⎢0
U tj } ⎢
⎢ −k
⎢
⎣0
0 −k
0
0
0
k
0
0
0 ⎤ ⎧U si ⎫
⎪ ⎪
0 ⎥⎥ ⎪U ti ⎪
⎨ ⎬
⎥
0 ⎪U sj ⎪
⎥
0 ⎦ ⎪⎩U tj ⎭⎪
Uyi
Uti
Usi
θ
Uxi
ith node
To transform the displacements at the ith node we have
⎧U si ⎫ ⎡ c s ⎤ ⎧U xi ⎫
⎨ ⎬=⎢
⎥ ⎨U ⎬
U
s
c
−
⎦ ⎩ yi ⎭
⎩ ti ⎭ ⎣
and at the jth node
⎧U sj ⎫ ⎡ c s ⎤ ⎧U xj ⎫
⎨ ⎬=⎢
⎥ ⎨U ⎬
U
−
s
c
⎦ ⎩ yj ⎭
⎩ tj ⎭ ⎣
c = cos θ
s = sin θ
We can write these relations together as
⎧U si ⎫ ⎡ c s 0 0 ⎤ ⎧U xi ⎫
⎪U ⎪ ⎢
⎥ ⎪U ⎪
−
0
0
s
c
⎪ ti ⎪ ⎢
⎪ yi ⎪
⎥
=
⎨ ⎬
⎨ ⎬
U
⎢
⎥
0 0 c s ⎪U xjj ⎪
⎪ sjj ⎪
⎪⎩U tj ⎪⎭ ⎢⎣ 0 0 − s c ⎥⎦ ⎪⎩U yj ⎪⎭
or as
{U% } = [Q]{U}
Pl i thi
Placing
this relationship
l ti
hi iinto
t th
the strain
t i energy expression
i we fifind
d
{ }
{ }
1 % T %
% = 1 {U}T [Q ]T [ K ][Q ]{U}
E = U ⎡⎣K e ⎤⎦ U
e
2
2
1
T
= {U} [ K e ]{U}
2
[K e ] = [Q] ⎡⎣K% e ⎤⎦ [Q]
T
which shows that
[ K e ] = [Q ]
T
% ⎤ [Q ]
⎡⎣K
e⎦
Expanding this out we find
⎡ c2
cs −c 2 −cs ⎤
⎢
2
2⎥
−
−
cs
s
cs
s
⎥
[K e ] = k ⎢⎢ 2
2
−c −cs c
cs ⎥
⎢
2
2 ⎥
cs
s ⎦
⎣ −cs − s
element (bar) stiffness matrix in the global x-y coordinates
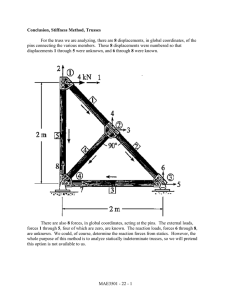
We now need to assemble these stiffness matrices into a global
stiffness matrix [Kg] for the truss, apply the boundary conditions, and
solve for the displacements {U} . Then we can find the external forces
on all the nodes (pins) in the x-y coordinates (including the reactions)
from
⎡⎣K g ⎤⎦ {U} = {Fn }
the contribution to the global Kg matrix for an element
containing the ith and jth nodes
U1
K g ( 2i − 1, 2i − 1) K g ( 2i − 1, 2i )
K g ( 2i, 2i − 1)
K g ( 2i, 2i )
K g ( 2i − 1, 2 j − 1) K g ( 2i − 1, 2 j )
K g ( 2i, 2 j − 1)
K g ( 2i, 2 j )
U 2i −1
U xi
U 2i
U yi
K g ( 2 j − 1, 2i − 1) K g ( 2 j − 1, 2i )
K g ( 2 j , 2i − 1)
K g ( 2 j , 2i )
K g ( 2 j − 1, 2 j − 1) K g ( 2 j − 1, 2 j )
K g ( 2 j , 2 j − 1)
K g ( 2 j, 2 j )
U 2 j −1
U xj
U2 j
U yj
UN
K g ( 2i − 1, 2i − 1) = k11
K g ( 2i − 1, 2i ) = k12
etc
etc.
components of the Ke stiffness matrix for an element
Finally, we can find the force in each bar from
⎧U xi ⎫
⎪U ⎪
⎪ yi ⎪
Fsj = k {−c − s c s} ⎨ ⎬
⎪U xj ⎪
⎩⎪U yj ⎭⎪
since
Fsj = k (U sj − U si )
U sj
Fsj
U si
Fsi
+ if tensile
- if compressive
and we have simply used the transformation of displacements to express
this force in terms of the x and y components of the displacements