Document 10639673
advertisement

Estimating Estimable Functions of β
c
Copyright 2012
Dan Nettleton (Iowa State University)
Statistics 511
1 / 17
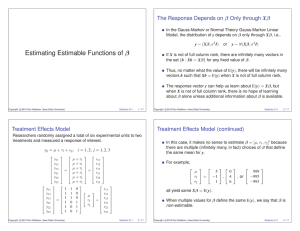
The Response Depends on β Only through Xβ
In the Gauss-Markov or Normal Theory Gauss-Markov Linear
Model, the distribution of y depends on β only through Xβ, i.e.,
y ∼ (Xβ, σ 2 I)
or
y ∼ N(Xβ, σ 2 I)
If X is not of full column rank, there are infinitely many vectors in
the set {b : Xb = Xβ} for any fixed value of β.
Thus, no matter what the value of E(y), there will be infinitely many
vectors b such that Xb = E(y) when X is not of full column rank.
The response vector y can help us learn about E(y) = Xβ, but
when X is not of full column rank, there is no hope of learning
about β alone unless additional information about β is available.
c
Copyright 2012
Dan Nettleton (Iowa State University)
Statistics 511
2 / 17
Treatment Effects Model
Researchers randomly assigned a total of six experimental units to two
treatments and measured a response of interest.
yij = µ + τi + ij ,
µ + τ1
11
µ + τ1 12
µ + τ1 13
=
+
µ + τ2 21
µ + τ2 22
µ + τ2
23
1 1 0
11
1 1 0
12
1 1 0 µ
=
τ1 + 13
1 0 1
21
τ2
1 0 1
22
23
1 0 1
y11
y12
y13
y21
y22
y23
y11
y12
y13
y21
y22
y23
i = 1, 2; j = 1, 2, 3
c
Copyright 2012
Dan Nettleton (Iowa State University)
Statistics 511
3 / 17
Treatment Effects Model (continued)
In this case, it makes no sense to estimate β = [µ, τ1 , τ2 ]0 because
there are multiple (infinitely many, in fact) choices of β that define
the same mean for y.
For example,
µ
5
0
999
τ1 = −1 , 4 , or −995
τ2
1
6
−993
all yield same Xβ = E(y).
When multiple values for β define the same E(y), we say that β is
non-estimable.
c
Copyright 2012
Dan Nettleton (Iowa State University)
Statistics 511
4 / 17
Estimable Functions of β
A linear function of β, Cβ, is said to be estimable if there is a
linear function of y, Ay, that is an unbiased estimator of Cβ.
Otherwise, Cβ is said to be non-estimable.
Note that Ay is an unbiased estimator of Cβ if and only if
E(Ay) = Cβ ∀ β ∈ IRp
⇐⇒
AXβ = Cβ ∀ β ∈ IRp
⇐⇒
AX = C.
This says that we can estimate Cβ as long as Cβ = AXβ = AE(y)
for some A, i.e., as long as Cβ is a linear function of E(y).
The bottom line is that we can always estimate E(y) and all linear
functions of E(y); all other linear functions of β are non-estimable.
c
Copyright 2012
Dan Nettleton (Iowa State University)
Statistics 511
5 / 17
Treatment Effects Model (continued)
E(y) = Xβ =
1
1
1
1
1
1
1
1
1
0
0
0
0
0
0
1
1
1
µ
τ1 =
τ2
µ + τ1
µ + τ1
µ + τ1
µ + τ2
µ + τ2
µ + τ2
=⇒
[1, 0, 0, 0, 0, 0]Xβ
=
[1, 1, 0]β
=
µ + τ1
[0, 0, 0, 1, 0, 0]Xβ
=
[1, 0, 1]β
=
µ + τ2
[1, 0, 0, −1, 0, 0]Xβ
=
[0, 1, −1]β
=
τ1 − τ2
are estimable functions of β.
c
Copyright 2012
Dan Nettleton (Iowa State University)
Statistics 511
6 / 17
Estimating Estimable Functions of β
If Cβ is estimable, then there exists a matrix A such that C = AX
and Cβ = AXβ = AE(y) for any β ∈ IRp .
It makes sense to estimate Cβ = AXβ = AE(y) by
d = Aŷ = APX y = AX(X0 X)− X0 y = AX(X0 X)− X0 Xβ̂
AE(y)
= APX Xβ̂ = AXβ̂ = Cβ̂.
Cβ̂ is called the Ordinary Least Squares (OLS) estimator of Cβ.
Note that although the “hat” is on β, it is Cβ that we are estimating.
c
Copyright 2012
Dan Nettleton (Iowa State University)
Statistics 511
7 / 17
Invariance of Cβ̂ to the Choice of β̂
Although there are infinitely many solutions to the normal
equations when X is not of full column rank, Cβ̂ is the same for all
normal equation solutions β̂ whenever Cβ is estimable.
To see this, suppose β̂ 1 and β̂ 2 are any two solutions to the
normal equations. Then
Cβ̂ 1 = AXβ̂ 1 = APX Xβ̂ 1
= AX(X0 X)− X0 Xβ̂ 1 = AX(X0 X)− X0 y
= AX(X0 X)− X0 Xβ̂ 2 = APX Xβ̂ 2
= AXβ̂ 2 = Cβ̂ 2 .
c
Copyright 2012
Dan Nettleton (Iowa State University)
Statistics 511
8 / 17
Treatment Effects Model (continued)
Suppose our aim is to estimate τ1 − τ2 .
As noted before,
Xβ =
1
1
1
1
1
1
1
1
1
0
0
0
0
0
0
1
1
1
µ
τ1 =
τ2
µ + τ1
µ + τ1
µ + τ1
µ + τ2
µ + τ2
µ + τ2
=⇒
[1, 0, 0, −1, 0, 0]Xβ = [0, 1, −1]β = τ1 − τ2 .
Thus, we can compute the OLS estimator of τ1 − τ2 as
[1, 0, 0, −1, 0, 0]ŷ = [0, 1, −1]β̂,
where ŷ = X(X0 X)− X0 y and β̂ is any solution to the normal
equations.
c
Copyright 2012
Dan Nettleton (Iowa State University)
Statistics 511
9 / 17
Treatment Effects Model (continued)
The normal equations in this case are
1
1
1
1
1
1
1
1
1
0
0
0
0
0
0
1
1
1
0
1
1
1
1
1
1
1
1
1
0
0
0
0
0
0
1
1
1
b1
b2 =
b3
1
1
1
1
1
1
1
1
1
0
0
0
0
0
0
1
1
1
0
y11
y12
y13
y21
y22
y23
6 3 3
b1
y··
⇐⇒ 3 3 0 b2 = y1· .
3 0 3
b3
y2·
c
Copyright 2012
Dan Nettleton (Iowa State University)
Statistics 511
10 / 17
Treatment Effects Model (continued)
ȳ··
0
are each solutions to
the normal equations
β̂ 1 ≡ ȳ1· − ȳ··
and β̂ 2 ≡ ȳ1·
ȳ2· − ȳ··
ȳ2·
because
6 3 3
6 3 3
0
ȳ··
y··
3 3 0 ȳ1· − ȳ·· = y1· = 3 3 0 ȳ1· .
3 0 3
y2·
3 0 3
ȳ2·
ȳ2· − ȳ··
Thus, the OLS estimator of Cβ = [0, 1, −1]β = τ1 − τ2 is
ȳ··
0
Cβ̂ 1 = [0, 1, −1] ȳ1· − ȳ·· = ȳ1· − ȳ2· = [0, 1, −1] ȳ1· = Cβ̂ 2 .
ȳ2· − ȳ··
ȳ2·
c
Copyright 2012
Dan Nettleton (Iowa State University)
Statistics 511
11 / 17
Treatment Effects Model (continued)
1/6
0
Let (X0 X)−
1 =
0
0
0
0
0
0
0 1/3
1/6 −1/6 and (X0 X)−
0 .
2 =
−1/6
1/6
0
0 1/3
−
0
It is straightforward to verify that (X0 X)−
1 and (X X)2 are each
0
generalized inverses of X X.
− 0
0
0
It is also easy to show that β̂ 1 = (X0 X)−
1 X y and β̂ 2 = (X X)2 X y.
c
Copyright 2012
Dan Nettleton (Iowa State University)
Statistics 511
12 / 17
Treatment Effects Model (continued)
PX
= X(X0 X)− X0 =
=
0
0
0
0
0
0
1
1
1
1
1
1
1
1
1
0
0
0
1/3 0
1/3 0
1
1/3 0
1
0 1/3
0
0 1/3
0 1/3
c
Copyright 2012
Dan Nettleton (Iowa State University)
0
0
0
1
1
1
0
0
0
0
0
1/3
0
0 1/3
1
1
0
1
1
0
1
0
1
1
0
1
1
1
1
1
1
1
1
3
1
3
1
3
1
0 =
0
1
0
0
1
1
1
0
0
0
0
0
0
1
1
1
1
3
1
3
1
3
1
3
1
3
1
3
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1
3
1
3
1
3
1
3
1
3
1
3
1
3
1
3
1
3
Statistics 511
.
13 / 17
Treatment Effects Model (continued)
Thus
d
E(y) = ŷ = PX y =
1
3
1
3
1
3
1
3
1
3
1
3
1
3
1
3
1
3
0 0 0
y11
y12
0 0 0
0 0 0
y13
1
1
1
0 0 0 3 3 3 y21
0 0 0 13 31 13 y22
y23
0 0 0 13 31 13
=
ȳ1·
ȳ1·
ȳ1·
ȳ2·
ȳ2·
ȳ2·
is our OLS estimator of
E(y) = Xβ =
1
1
1
1
1
1
c
Copyright 2012
Dan Nettleton (Iowa State University)
1
1
1
0
0
0
0
0
0
1
1
1
µ
τ1 =
τ2
µ + τ1
µ + τ1
µ + τ1
µ + τ2
µ + τ2
µ + τ2
.
Statistics 511
14 / 17
Treatment Effects Model (continued)
Also, we can see that the OLS estimator of
µ
= [0, 1, −1] τ1 = [1, 0, 0, −1, 0, 0]
τ2
τ1 − τ2
= [1, 0, 0, −1, 0, 0]
c
Copyright 2012
Dan Nettleton (Iowa State University)
µ + τ1
µ + τ1
µ + τ1
µ + τ2
µ + τ2
µ + τ2
1
1
1
1
1
1
1
1
1
0
0
0
0
0
0
1
1
1
µ
τ1
τ2
= [1, 0, 0, −1, 0, 0]E(y) is
Statistics 511
15 / 17
Treatment Effects Model (continued)
d = [1, 0, 0, −1, 0, 0]ŷ
[1, 0, 0, −1, 0, 0]E(y)
= [1, 0, 0, −1, 0, 0]
ȳ1·
ȳ1·
ȳ1·
ȳ2·
ȳ2·
ȳ2·
= ȳ1· − ȳ2·
c
Copyright 2012
Dan Nettleton (Iowa State University)
Statistics 511
16 / 17
The Gauss-Markov Theorem
Under the Gauss-Markov Linear Model, the OLS estimator c0 β̂ of an
estimable linear function c0 β is the unique Best Linear Unbiased
Estimator (BLUE) in the sense that Var(c0 β̂) is strictly less than the
variance of any other linear unbiased estimator of c0 β for all β ∈ IRp
and all σ 2 ∈ IR+ .
The Gauss-Markov Theorem says that if we want to estimate an
estimable linear function c0 β using a linear estimator that is
unbiased, we should always use the OLS estimator.
In our simple example of the treatment effects model, we could
have used y11 − y21 to estimate τ1 − τ2 . It is easy to see that
y11 − y21 is a linear estimator that is unbiased for τ1 − τ2 , but its
variance is clearly larger than the variance of the OLS estimator
ȳ1· − ȳ2· (as guaranteed by the Gauss-Markov Theorem).
c
Copyright 2012
Dan Nettleton (Iowa State University)
Statistics 511
17 / 17