OPTIMAL STOPPING WITH PRIVATE INFORMATION
advertisement

OPTIMAL STOPPING WITH PRIVATE INFORMATION
THOMAS KRUSE AND PHILIPP STRACK
Abstract. Many economic situations are modeled as stopping problems. Examples are
timing of market entry decisions, search, and irreversible investment. We analyze a principalagent problem where the principal and the agent have dierent preferences over stopping
rules. The agent privately observes a signal that inuences his own and the principal's
payo. Based on his observation the agent decides when to stop. In order to inuence the
agents stopping decision the principal chooses a transfer that conditions only on the time
the agent stopped.
We derive a monotonicity condition such that all cut-o stopping rules can be implemented using such a transfer. The condition generalizes the single-crossing condition from
static mechanism design to optimal stopping problems. We give conditions under which the
transfer is unique and derive a closed form solution based on reected processes. We prove
that there always exists a cut-o rule that is optimal for the principal and, thus, can be
implemented using a posted-price mechanism.
An application of our result leads to a new purely stochastic representation formula for
the value function in optimal stopping problems based on reected processes. Finally, we
apply the model to characterize the set of implementable policies in the context of job search
and irreversible investment.
Dynamic Mechanism Design, Optimal Stopping, Dynamic Implementability,
Posted-Price Mechanism
Keywords:
JEL codes:
D82, D86, C02
Thomas Kruse, Institute for Applied Mathematics, University of Bonn, Endenicher Allee 60, 53113 Bonn,
Germany. Web: http://www.uni-bonn.de/∼tkruse/, Email: tkruse@uni-bonn.de; Philipp Strack, Institute
for Microeconomics & Hausdor Center for Mathematics, University of Bonn, Lennestrasse 43, 53111 Bonn,
Germany. Web: http://www.uni-bonn.de/∼pstrack/, Email: philipp.strack@gmail.com.
We would like to thank Stefan Ankirchner, Dirk Bergemann, Paul Heidhues, Daniel Krähmer, Benny
Moldovanu, Sven Rady, Juuso Toikka and seminar audiences in Yale, Maastricht and Bonn for many helpful
comments and suggestions. All remaining errors are our own.
1
1. Introduction
Many economic situations are modeled as stopping problems. Examples are job search,
timing of market entry decisions, or irreversible investment decisions. In an optimal stopping
problem information arrives over time and a decision maker decides at every point in time
whether to stop or continue. The stopping decision is irreversible and, thus, stopping today
implies forgoing the option to stop later with a potentially larger return.
The literature on optimal stopping assumes that the decision maker observes all relevant
information directly.
There are, however, many economic environments modeled as opti-
mal stopping problems where private information is a crucial feature. Important examples
include the regulation of a rm that decides when to enter a market, or the design of unemployment benets when the worker privately observes his job oers. Consider for example a
pharmaceutical rm that observes the stochastically changing demand for a new product and
needs to decide on whether and when to enter the market for this product. If the rm starts
selling the product, it pays an investment cost and receives the ow returns from selling
the product at all future times. When timing its market entry decision, the rm solves an
irreversible investment problem. As famously shown in the irreversible investment literature,
it is optimal for the rm to delay investment beyond the point where the expected return
of investing becomes positive (for an excellent introduction in the irreversible investment
literature see Dixit and Pindyck 2008). While this investment strategy is optimal for the
rm, it is typically wasteful from a social perspective: As the rm does not internalize the
consumer surplus, it will enter the market too late. A question that naturally arises is how a
regulator can improve the incentives of the rm if the demand is private information of the
rm. The result we derive in this paper implies that the regulator can always implement a
socially ecient market entry decision through a simple posted-price-like-mechanisms that
conditions on when the rm enters.
Our model is a dynamic principal-agent model. The agent privately observes a randomly
changing signal and chooses a stopping rule. The principal observes the stopping decision
of the agent, but not the signal. The principal commits to a transfer in order to inuence
the agent's decision.
Our main result is that under a single-crossing condition all cut-o
rules can be implemented using transfers that condition only on the time the agent stopped.
As the transfer does not depend on private information of the agent it can be implemented
without communication. This feature resembles a posted-price mechanism and makes our
mechanism especially appealing from an applied perspective.
Finally, we show that the
minimal stopping rule that is optimal for the principal is a cut-o rule and thus can be
implemented.
2
We establish our result as follows. First, we derive a dynamic single-crossing condition
that ensures the monotonicity of the continuation gain in the agent's signal at a every point
in time. A consequence of this monotonicity is that the incentive to stop is increasing in the
type. Thus, to implement a cut-o rule it suces to provide incentives to the (marginal) cuto type. Intuitively, taking future transfers as given, the transfer providing incentives to the
marginal type today could be calculated recursively. But as future transfers are endogenous,
this recursive approach is dicult and requires the calculation of a value function at every
point in time.
We circumvent all these problems attached to the recursive approach by
directly constructing transfers using reected stochastic processes.
We dene a reected
process as a Markov process that equals the original process as long as the latter stays below
the cut-o. Once the original process exceeds the cut-o, the reected process follows its
own dynamics and is dened to stay below the cut-o.
We show that every cut-o rule can be implemented through a transfer that equals the
agent's expected payo evaluated at the process reected at the cut-o. To the best of our
knowledge, we are the rst to use reected processes in the context of mechanism design. We
also believe that this paper contributes to the mathematical literature on optimal stopping as
we are able to give a new, completely probabilistic sucient condition for optimal stopping
rules.
The approach of this paper diers from the standard mechanism-design one, since we do
not rely on the revelation principle and direct mechanisms. We do not use direct mechanisms
in order to bypass technical problems that a formalization of the cheap talk protocol between
the principal and the agent would entail: the agent would have to communicate with the
principal constantly and, hence, the space of communication strategies would be very rich.
As optimal communication strategies are not necessarily Markovian, an optimization over
those is a hard problem.
The direct mechanism design approach, nevertheless, has been
successfully used in general discrete-time settings in Bergemann and Välimäki (2010) for
welfare maximization, in Pavan et al. (2012) for revenue maximization, or in continuous
time to solve principal-agent problems in Sannikov (2008) and Williams (2011).
Surprisingly, it turns out that for optimal stopping problems the focus on posted-price
mechanisms is not restrictive from a welfare perspective. We show that a principal-optimal
full information stopping rule (rst best) is always implementable by posted-price mechanisms. Moreover, while direct mechanisms often require communication and a transfer at
every point in time, our posted-price mechanism demands no communication and only a
single transfer at the time of stopping.
The paper proceeds as follows. Section 2 introduces the model. In Section 3 we show that
all cut-o rules are implementable using posted-price mechanisms and derive the transfer.
Furthermore Section 3 establishes that the minimal stopping rule that is optimal for the
3
principal is a cut-o rule. Section 4 presents applications to irreversible investment, search,
and proves that the classical static implementability result is a special case of our dynamic
result. Section 5 concludes.
2. The Model
We rst give an informal presentation of the model before we present all the precise
mathematical assumptions. There is a risk-neutral principal and a risk-neutral agent, who
depending on the stopping rule
τ
and the signal receive
ˆ
X
a payo of
τ
agent: V (τ ) = E
h(t, Xt )dt + g(τ, Xτ )
0
ˆ τ
principal: W (τ ) = E
β(t, Xt )dt + α(τ, Xτ ) .
0
The signal
X
is a Markov process which is only observed by the agent. Depending on his past
observation of the signal the agent can decide at every point in time between stopping and
continuing. In order to inuence the agents decision the principal commits to a transfer
π
π implements the stopping
rule τ if τ is optimal for the agent given he receives the transfer π in addition to his payos
g and h
V (τ ? ) + π(τ ? ) ≥ V (τ ) + π(τ )
for all τ .
that only conditions on the time the agent stopped. The transfer
?
?
The next sections state the precise assumptions of the model.
Evolution of the Private Signal.
2.1.
some xed time horizon
T < ∞.
1
Time is continuous and indexed by
At every point in time
t
t ∈ [0, T ]
for
the agent privately observes a
Xt . The signal is adapted to the ltration F of some ltered probability
space (Ω, P, F = {Ft }t∈[0,T ] ). The ltered probability space supports a one-dimensional F Brownian motion Wt and a F -Poisson random measure N (dt dz) with compensator ν(dz) on
R. We denote by Ñ (dt dz) = N (dt dz) − ν(dz)vt the compensated Poisson random measure.
The time zero signal X0 is distributed according to the cumulative distribution function
F : R → [0, 1]. The signal observed by the agent Xt changes over time and follows the
real valued signal
inhomogeneous Markovian jump diusion dynamics
ˆ
(2.1)
The functions
dXt = µ(t, Xt )dt + σ(t, Xt )dWt +
µ, σ : [0, T ] × R → R
and
γ(t, Xt− , z)Ñ (dtdz).
R
γ : [0, T ] × R × R → R satisfy the
usual assump-
tions listed in Appendix A to ensure that the process exists and is well-behaved .
Under
t,x
these assumptions there exists a path-wise unique solution (Xs )s≥t to (2.1) for every initial
t,x
condition Xt
= x.
1We
show later that discrete time models are a special case where we restrict the set of possible strategies.
4
We assume that jumps preserve the order of signals.
signal
x≤x
0
At every point in time
t
a lower
before a jump has a lower level after a jump
x + γ(t, x, z) ≤ x0 + γ(t, x0 , z)
ν(dz) − a.s.
This implies a comparison result (c.f. Peng and Zhu 2006): The path of a signal starting at
a lower level
times
x ≤ x0
at time
t
is smaller than the path of a signal starting in
at all later
s>t
P − a.s.
0
Xst,x ≤ Xst,x
(2.2)
2.2.
x0
Information, Strategies and Payos of the Agent.
the signal the agent decides when to stop.
Based on his observations of
The agent can only stop at times
T ⊆ [0, T ].
Note that we can embed discrete time in our model by only allowing the agent to stop at a
nite number of points
taking values in
T.
T = {1, 2, . . . , T }.
Denote by
T
the set of
F
adapted stopping rules
A stopping rule is a complete contingent plan which maps every history
(t, (Xs )s≤t ) into a binary stopping decision. The agent is risk-neutral
2
and receives a ow payo h : [0, T ] × R → R and terminal payo g : [0, T ] × R → R. His
value V : T → R of using the stopping rule τ equals
ˆ τ
h(t, Xt )dt + g(τ, Xτ ) .
V (τ ) = E
observed by the agent
0
The problem analyzed in the optimization theory literature is to nd an
ping rule, i.e.
a stopping rule
τ
?
such that for all stopping rules
agent-optimal stop-
τ ∈T
V (τ ? ) ≥ V (τ ) .
h are Lipschitz
assume that g is twice
To ensure that the optimization problem is well posed we assume that
continuous and of polynomial growth in the
dierentiable in the
(2.3)
x
x
variable and once in the
variable. Moreover we
t
g
and
variable. Then the innitesimal
1
(E [g(t + ∆, Xt+∆ )|Xt = x] − g(t, x))
∆&0 ∆
(Lg)(t, x) = lim
is well dened for every
t
and every
x
and we have the identity
1
(Lg)(t, x) = gt (t, x) + µ(t, x)gx (t, x) + σ(t, x)2 gxx (t, x)
2
ˆ
+ g(t, x + γ(t, x, z)) − g(t, x) − gx (t, x)γ(t, x, z)ν(dz).
R
Finally we assume that the payos of the agent satisfy the following single-crossing condition
2Note
extendedito include a ow payo after stopping, i.e. payos of the form
h´ that our model can easily
´T
τ
E 0 h(t, Xt )dt + g(τ, Xτ ) + τ h̃(t, Xt )dt .
5
Denition 1
.
(Dynamic Single-Crossing)
x 7→ h(t, x) + (Lg)(t, x)
The mapping
is non-
increasing.
The dynamic single-crossing condition means that if after every history
Ft
the expected
change in the payo of the agent if he waits an innitesimal short time is decreasing in the
current signal
lim
∆&0
1
∆
Xt = x
ˆ t+∆
E
ˆ
t
h(s, Xs )dt + g(t, Xt ) | Ft
h(s, Xs )ds + g(t + ∆, Xt+∆ ) −
0
0
ˆ t+∆
1
= lim E
h(s, Xs )dt + g(t + ∆, Xt+∆ ) − g(t, Xt ) | Xt = x
∆&0 ∆
t
= h(t, x) + (Lg)(t, x) .
The dynamic single-crossing condition is a condition naturally satised in most optimal
stopping problems. Examples in the economic literature are irreversible investment (Dixit
and Pindyck 2008), learning in one armed bandit models, job and other search problems as
well as American options.
2.3.
Information, Strategies and Payos of the Principal.
Similar to the agent the
W :T →R
β : [0, T ] × R → R and terminal payo α : [0, T ] × R → R
ˆ τ
β(t, Xt )dt + α(τ, Xτ ) .
W (τ ) = E
principal is risk neutral and wants to maximize the functional
of a ow payo
which is the sum
0
α, β
g, h as
The payos
of the principal satisfy the same regularity assumptions as the payos of
the agent
well as the dynamic single-crossing condition. We call a stopping time
principal-optimal
if it maximizes the utility of the principal,
W (τ ? ) ≥ W (τ )
for all
τ?
τ ∈ T.
Note that the principal optimal stopping time (rst best) is the stopping time the principal
would like to use if he observes the signal
X.
The principal however, does not observe the signal
of
X0
signal
and the probability measure
X
P
X.
He only knows the distribution
describing the evolution of
X,
i.e
µ, σ
and
γ.
F
As the
is unobservable the principal has no information about the realized ow payos of
the agent or the agents expectation about future payos. The only information the principal
observes is the realized stopping decision of the agent.
she commits to a transfer scheme
π : [0, T ] → R
In order to inuence this decision
that depends only on the time the agent
stopped. As the transfer only conditions on publicly observable information it requires no
communication between the principal and the agent and can be interpreted as a posted-price.
We dene the set of stopping rules that are implementable through a transfer
6
Denition 2 (Implementability).
E
(2.4)
τ?
τ? ∈ T
ˆ
h(t, Xt )dt + g(τ , Xτ ? ) + π(τ ) ≥ E
?
π
τ
?
0
A transfer
is implemented by the transfer
π
τ ∈T
if for all stopping rules
ˆ
A stopping rule
h(t, Xt )dt + g(τ, Xτ ) + π(τ ) .
0
implements the stopping rule
if he receives the transfer
π
τ?
if the stopping rule
in addition to his payos
h
and
g.
τ?
is optimal for the agent
Implementability generalizes
the notion of optimality for stopping rules, as a stopping rule is optimal if and only if it is
3
implemented by a constant transfer.
3. Implementable Stopping Rules
We introduce the notion of cut-o rules. Cut-o rules are stopping rules such that the
agent stops the rst time the signal
Denition 3 (Cut-O Rule).
function
b : [0, T ] → R
Xt
exceeds a time-dependent threshold
A stopping rule
τ ∈T
b.
is called a cut-o rule if there exists a
such that
τ = inf{t ≥ 0 | Xt ≥ b(t)}.
In this case we write
τ = τb .
If
b
is càdlàg we call
τb
a regular cut-o rule.
4
In Section 3.2 we show that all regular cut-o rules are implementable. The associated
transfer admits an explicit representation in terms of the reected version of
introduce in Section 3.1.
X
which we
Under the assumption, that the agent stops the rst time it is
optimal to stop we show in Section 3.3 that every implementable stopping rule, is a cut-o
rule.
Reected Processes.
b : [0, T ] → R the reected version of X is a
process X̃ which evolves according to the same dynamics as X as long it is strictly below b
but is pushed downwards any time it tries to exceed b.
3.1.
Denition
(X̃t )0≤t≤T
For a given barrier
.
(Reected Process)
on
(Ω, P, F)
Let
b : [0, T ] → R
is called a reected version of
be a càdlàg function.
X
with barrier
b
A processes
if it satises the
conditions
1)
X̃
is constrained to stay below
X
Xt = X̃t
2) Until
b:
For every
t ∈ [0, T ]
X̃t ≤ b(t) a.s.
0 ≤ t < τb we have
we have
hits the barrier both processes coincide: For every
a.s.
3The
denition of implementability does not require a regularity assumption on the transfer π ensuring
that the resulting optimization problem of the agent is well posed, as all transfers that lead to an ill-posed
optimization problem implement no stopping rule and thus are irrelevant.
4A function b : [0, T ] → R is called càdlàg if it is right-continuous and has left-limits.
7
Random Walk X t , Reflected RW X t
18
17
16
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
10
20
Brownian Motion X t , Reflected BM X t
30
40
18
17
16
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
t 0
10
20
30
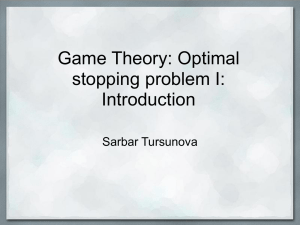
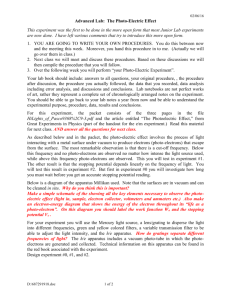
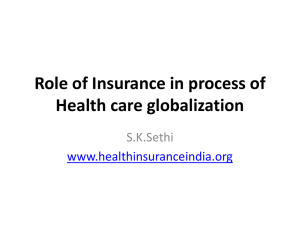
Figure 3.1. Realization of a random walk (left) and a Brownian motion
(right) starting in
3)
X̃
X0 = 8
reected at the constant barrier
X : For every t ∈ [0, T ] we have X̃t ≤ Xt
barrier, X̃ is at b: X̃τb = b(τb ) a.s.
is always smaller than
4) When
X
hits the
Moreover, we assume that for every stopping rule τ ∈
τ,η
variable η there exists a process (X̃t )τ ≤t≤T such that
5)
6)
7)
b(t) = 10.
T
and every
Fτ
a.s.
measurable random
X̃ τ,η starts at time τ in η : P[X̃ττ,η = η] = 1.
X̃ has the strong Markov Property: We have X̃tτ,X̃τ = X̃t a.s. for every t ∈ [τ, T ].
0
A higher value x ≥ x of X̃ at time t leads to higher values of X̃ at all later times
0
s ≥ t: X̃st,x ≤ X̃st,x a.s.
The next Proposition ensures the existence of a reected version of
X
for a wide range of
settings.
Proposition 4. Let b be a càdlàg function.
a) If X has no jumps (i.e. γ = 0), then there exists a version of X reected at b.
b) If X is non decreasing and b non increasing, then a version of X reected at b
is given by X̃sτ,η = min{Xsτ,η , b(s)}.
Proposition 4 shows that reected versions of the process exist for very large classes of environments, especially Diusion processes. One assumption of Proposition 4 will be satised
in all the examples we discuss later.
3.2.
All Cut-O Rules are implementable.
In this section we prove that every cut-o
rule is implementable. For a given cut-o rule we dene the transfer and explicitly verify
that it implements the cut-o rule. The transfer equals the expected future change in payo
evaluated at the process reected at the cut-o.
8
40
t
Theorem 5. Let b : [0, T ] → R such that there exists a version X̃ of X reected at b. Then
τb is implementable by the transfer
ˆ T
t,b(t)
t,b(t)
(3.1)
π(t) = E
h(s, X̃s ) + (Lg)(s, X̃s )ds .
t
Proof.
Let
(Lg)(t, x).
π
be given by Equation (3.1). To shorten notation we dene
E
ˆ
τ
ˆ
h(t, Xt )dt + g(τ, Xτ ) + π(τ ) ≤ E
X
g
is a Feller process and the generator of
E
ˆ
τ
z(s, Xs )ds + π(τ ) ≤ E
ˆ
First, we prove that the stopping
ˆ
E 1{τb <τ }
0
= E 1{τb <τ }
τb
z(s, Xs )ds + π(τb ) .
0
0
min{τ, τb }
τ
performs at least as well as
τ.
We readily
z(s, Xs )ds + π(τ )
ˆ
ˆ
τb
ˆ
τ
τb
T
z(s, X̃sτ,b(τ ) )ds
z(s, Xs )ds +
z(s, Xs )ds +
0
.
τ
The comparison principle for the reected process
for every time
h(t, Xt )dt + g(τb , Xτb )ds + π(τb ) .
is well dened we can apply Dynkin's formula
to get that (3.2) is equivalent to
compute
τb
0
0
As
is non-increasing. We need to show
τ ∈T
for all stopping times
(3.2)
x 7→ z(t, x)
By the single-crossing condition
z(t, x) = h(t, x) +
X̃ τb ,b(τb )
with the original process
X
yields
s ≥ τb
after the process hit the barrier that the reected process is not greater
τb ,b(τb )
than the original process Xs ≥ X̃s
. As the reected process X̃ is Markovian it follows
τ ,b(τb )
τb ,b(τb )
τ,X̃τ b
that X̃s
= X̃s
for all times s ≥ τ > τb . By the comparison principle for reected
s ≥ τ > τb
the reected process started in (τ, b(τ )) is not
τb ,b(τb )
τb ,b(τb )
τ,b(τ )
smaller than the reected process started in (τ, X̃τ
), i.e. X̃s
≥ X̃sτ,X̃τ
. These
processes we have that for all times
two inequalities combined with the monotonicity of
ˆ
ˆ
τ
ˆ
z(s, X̃sτb ,b(τb ) )ds
τ
τb
ˆ
T
z(s, X̃sτ,b(τ ) )ds
yield that for all
τ
z(s, Xs )ds ≤
τb
z
9
T
z(s, X̃sτb ,b(τb ) )ds .
≤
τ
τb < τ
τb < τ the stopping rule τb
the stopping rule τ
ˆ τ
E 1{τb <τ }
z(s, Xs )ds + π(τ )
Hence conditional on
than
0
ˆ
≤ E 1{τb <τ }
= E 1{τb <τ }
ˆ
ˆ
τb
gives the agent a higher expected payo
τ
z(s, X̃sτb ,b(τb ) )ds
z(s, Xs )ds +
τb
T
z(s, X̃sτb ,b(τb ) )ds
+
τ
τb
0
ˆ
z(s, Xs )ds + π(τb )
.
0
Consequently it is never optimal to continue after
τb .
The agent is at least as well of if he
min{τ, τb } instead of τ
τ
E
z(s, Xs )ds + π(τ )
0
ˆ τ
ˆ τ
= E 1{τb <τ }
z(s, Xs )ds + π(τ ) + E 1{τb ≥τ }
z(s, Xs )ds + π(τ )
0
0
ˆ τ ∧τb
z(s, Xs )ds + π(τ ∧ τb ) .
≤E
uses the stopping rule
ˆ
0
Thus it suces to consider stopping rules
E
ˆ
τ
τ ≤ τb .
We have
z(s, Xs )ds + π(τ )
0
=E
ˆ
ˆ
τ
z(s, X̃sτ,b(τ ) )ds
z(s, Xs )ds +
0
ˆ
τb
τ
T
z(s, X̃sτ,b(τ ) )ds
+
.
τb
τ,b(τ )
for all s ≥ τ.
X̃sτ,Xτ ≤ X̃s
By the minimality property of reected processes the original process X and the reected
τ,X
τ,Xτ
coincide for all times before they hit the barrier, i.e. Xs = X̃s τ for all s < τb .
process X̃
τb ,b(τb )
Moreover, the Markov property of the reected process yields X̃s
= X̃sτ,Xτ for s ≥ τb .
From the comparison principle for reected processes follows
10
The monotonicity of
E
ˆ
τ
z
implies
ˆ
z(s, Xs )ds + π(τ ) = E
0
ˆ
τ
=E
ˆ
0
z(s, X̃sτ,Xτ )ds
ˆ
τ
ˆ
ˆ
τb
z(s, X̃sτ,Xτ )ds
ˆ
τ
z(s, X̃sτ,b(τ ) )ds
τb
ˆ
τb
z(s, Xsτ,Xτ )ds
T
z(s, X̃sτb ,b(τb ) )ds
+
τb
τ
τb
T
+
τ
z(s, Xs )ds +
ˆ
τ
z(s, Xs )ds +
0
=E
T
z(s, Xs )ds +
ˆ
τ
ˆ
τ
0
=E
z(s, X̃sτ,b(τ ) )ds
z(s, Xs )ds +
0
≤E
T
h(t, Xt )dt + g(τb , Xτb ) + π(τb ) .
0
3.3.
All Implementable Stopping Rules are Cut-o Rules.
a xed time-t signal
payo if
For a xed transfer
π
and
π
x = Xt the agent's continuation value w (t, x) is the increase in expected
the agent uses the optimal continuation strategy instead of stopping at time t
ˆ τ
t,x
t,x
π
h(s, Xs )ds + g(τ, Xτ ) + π(τ ) − g(t, x) − π(t).
w (t, x) = sup E
τ ∈Tt,T
t
The continuation value satises the following properties.
5
Lemma 6. The mapping x 7→ wπ (t, x) is non-increasing and Lipschitz continuous.
By denition the continuation value is non-negative. If the continuation value is positive
it is never optimal for the agent to stop. If the continuation value equals zero it is optimal
to stop immediately but potentially there exists another strategy that stops later and is
also optimal. Clearly if the agent is indierent strategies that randomize over stopping and
continuing are also optimal.
Denition 7 (Minimal Stopping Rule). We call a stopping time τ
the transfer
π
which is implemented by
minimal if and only if the agent stops the rst time it is optimal to stop, i.e.
τ = inf{t ≥ 0 | wπ (t, Xt ) = 0}.
The restriction to minimal stopping rules allows us to excludes non-generic cases.
next proposition shows only cut-o rules can be implemented using a transfer
π
The
if we assume
that the agent stops the rst time it is optimal for him.
5The
monotonicity of x 7→ wπ (t, x) and the resulting form of the continuation region is shown in Jacka and
Lynn (1992) for the case that X is a Itô diusion.
11
Proposition 8. Let the stopping rule τ be implemented by the transfer π and minimal then
τ is a cut-o rule.
Proof. We x a point in time t ∈ [0, T ] and introduce the stopping region Dt = {x ∈
R|wπ (t, x) = 0}. Let x ∈ Dt and x0 ≥ x. Then Lemma 6 implies that the continuation value
wπ (t, x0 )
at
x0
is smaller than the continuation value
stopping region
Dt
as well. This implies that
Dt = [b(t), ∞)
at
x
and hence
x0
is in the
is an interval which is unbounded on the
π
x → w (t, x) is continuous and hence Dt is closed. Therefore
some b(t) ∈ R. This implies that τ is a cut-o rule with barrier b
right. By Lemma 6 the function
we have
Dt
wπ (t, x)
for
τ = inf{t ≥ 0 | Xt ∈ Dt } = inf{t ≥ 0 | Xt ≥ b(t)}.
3.4.
A Principal-Optimal Policy is Implementable.
principal-optimal policy is implementable.
payo of the principal
W (τ ) = E
ˆ
In this section we prove that a
A principal-optimal policy that maximizes the
τ
β(t, Xt )dt + α(τ, Xτ ) .
0
Recall that we made no assumptions on the payos
a, b
of the principal, apart from dier-
entiability and the single-crossing assumption.
Theorem 9. There exists a principal-optimal stopping rule that is implementable.
Proof.
Assume that the preferences of the principal and the agent are perfectly aligned
V ≡ W.
It follows from Proposition 8 that the minimal stopping rule implemented by the
transfer of zero
π ≡0
is a cut-o rule. As the preferences of the agent and the principal
are the same it follows that the minimal principal-optimal stopping rule is a cut-o rule. By
Theorem 5 all cut-o rules can be implemented and it follows that the minimal principal-
optimal stopping rule is implementable.
3.5.
Uniqueness of The Payment.
payment implementing a cut-o rule
τb
In this section we derive conditions such that the
is uniquely determined up to a constant.
Proposition 10. Let X be a regular continuous diusion (γ = 0 and σ bounded away from
zero) and the barrier b be continuously dierentiable, then there exists up to an additive
constant at most one continuously dierentiable transfer π : [0, T ] → R implementing a
cut-o rule τb .
Proof.
Let
π
denote a continuously dierentiable transfer implementing the stopping rule
We assume that
π(T ) = 0
and show that
π
τb .
is uniquely determined. The value function is
12
dened by
v (t, x) = sup E
π
(3.3)
ˆ
τ ∈Tt,T
Since
g, h
and
π
τ
h(s, Xst,x )ds
+
g(τ, Xτt,x )
+ π(τ ) .
t
v π is continuously dierentiable in t
x < b(t). Moreover, since τb is an optimal
are suciently smooth it follows that
and twice continuously dierentiable in
x
for all
stopping time in (3.3) the value function is also given by
v (t, x) = E
π
ˆ
τb
h(s, Xst,x )ds
g(τb , Xτt,x
)
b
+
t
In particular, at every point
x < b(t)
+ π(τb ) .
below the barrier it is optimal to continue, which
implies that
Lv π (t, x) + h(t, x) = 0.
(3.4)
On the barrier it is optimal to stop, which yields
v π (t, b(t)) = g(t, b(t)) + π(t)
(3.5)
for all
t ∈ [0, T ].
Since the agent has to stop at time
T
we have for all
x∈R
v π (T, x) = g(T, x).
(3.6)
Moreover the smooth pasting principle implies that
∂x v π (t, b(t)) = ∂x g(t, b(t)).
(3.7)
Observe that by Ladyzhenskaja et al. (1968; Theorem 5.3 in Chapter 4) there exists a
unique solution to Equations (3.4),(3.6) and (3.7). As these three equations do not depend
on the transfer
π
the value function does not depend on
dierentiable transfers
by Equation (3.5)
π
π
with
π(T ) = 0
π
neither. So for all continuously
the associated value functions coincide
is uniquely determined by
π
π(t) = v (t, b(t)) − g(t, b(t)).
v π = v.
But
4. Applications and Examples
4.1.
Irreversible Investment and Regulation.
In this section we present an application
of our result to the classical irreversible investment literature. A pharmaceutical rm observes demand for a new product
X.
The demand
Xt
is a geometric Brownian motion with
drift
dXt = Xt µdt + Xt σdWt ,
0 ≤ µ < r and σ > 0. If the rm starts selling the product at time t it pays continuous
investment cost c : R+ → R+ and receives the ow returns from selling the product. The
where
13
total expected payo of the rm equals
ˆ
V (τ ) = E −c(τ ) +
∞
−rt
e
τ
−rτ Xτ
Xt dt = E −c(τ ) + e
.
r−µ
When timing its market entry decision the rm solves an irreversible investment problem. As
famously shown in the irreversible investment literature (see for example Dixit and Pindyck
(2008)) it is optimal for the rm to delay investment beyond the point where the net present
value
Xt
−c(t) + e−rt r−µ
of investing becomes positive. While this behavior is optimal for the
rm it is wasteful from a social perspective. Assume that the consumers discount at the same
rate have an additional gain
Γ>0
society equals
W (τ ) = V (τ ) + E
ˆ
from the pharmaceutical such that the overall benet of
∞
−rt
e
τ
−rτ (1 + Γ)Xτ
ΓXt dt = E −c(τ ) + e
.
r−µ
As the rm does not internalize the benet of the consumers it will enter the market too
late.
Proposition 11. Let
τ V = arg supτ V (τ ) be the optimal stopping time of the rm and
τ W = arg supτ W (τ ) be the socially optimal stopping time, then we have that
τW < τV .
A question that naturally arises is how a regulator could improve the incentives of the rm
if demand is private information of the rm. By Theorem 1 we know that using a simple
posted-price mechanisms the regulator can always implement the socially ecient market
π.
V (τ ) = E [g(τ, Xτ )] .The
entry decision. In the next paragraph we will explicitly calculate the associated transfer
x
−c(t), the rm faces the maximization problem
e−rt r−µ
g(t, x) =
generator Lg is given
Dene
by
(Lg)(t, x) = −c0 (t) − re−rt
Clearly
(Lg)(t, x)
is decreasing in
x
x
µx
+ e−rt
= −c0 (t) − e−rt x .
r−µ
r−µ
and thus the dynamic single-crossing condition is satis-
ed. The transfer is given by
π(t) = E
ˆ
T
(Lg)(s, X̃st,b(t) )ds
=E
t
ˆ
14
0
−rs
−c (s) − e
t
= (c(T ) − c(t)) − φb (t, b(t)) ,
T
X̃st,b(t) ds
where
φ
φb (t, x) = E
h´
T
t
e−rs X̃st,x ds
i
is the expectation of the reected process
X̃ .The function
is the unique solution to the partial dierential equation
This allows
4.2.
φx (t, x) = 0 for all x = b(t)
x2 σ 2
φt (t, x) + φx (t, x)µx + φxx (t, x)
= e−rt x for all x < b(t) .
2
one to easily calculate φ numerically.
Constant Processes and the Relation to Static Mechanism Design.
In this sec-
tion we show that for the special case of constant processes our setting reduces to the classical
static mechanism design setting analyzed among others by Mirrlees (1971) and Guesnerie
and Laont (1984). We will explicitly construct the reected version
X̃
of the process
X.
In
this context the set of cut-o rules is equivalent to the set of monotone allocations and thus
we recover the famous result that every monotone allocation is implementable.
Consider the case without ow transfers
zero, i.e.
Xt = X0
for all
t ∈ [0, T ].
h ≡ 0.
Let the signal
X
be constant after time
As the signal is constant after time zero the private
information is one dimensional. Consequently the outcome of any (deterministic) stopping
X0 . Henceforth we dene τ̂ : R → [0, T ] as a function
of the initial signal τ̂ (x) = E [τ |X0 = x]. As the outcome τ̂ (X0 ) depends only on the initial
signal X0 we can dene a transfer π̂ : R → R that only conditions on X0 by π̂(x) = π(τ (x)) .
rule
τ
depends only on the initial signal
Implementability reduces to the following well known denition of static Implementability
(Guesnerie and Laont (1984), Denition 1)
Denition 12 (Static Implementability). An allocation rule τ : R → [0, T ] is implementable
if there exists a transfer
π̂ : R → R
such that for all
x, x0 ∈ X
g(τ̂ (x), x) + π̂(x) ≥ g(τ̂ (x0 ), x) + π̂(x0 ) .
As famously shown by Mirrlees (1971) and Guesnerie and Laont (1984) any monotone
decreasing allocation rule is implementable (Guesnerie and Laont (1984), Theorem 2).
Furthermore the transfers implementing
ˆ
π̂(x) =
x
with some constant
x
τ̂
6
are of the from
∂
g(τ̂ (z), z)dz − g(τ̂ (x), x) + c ,
∂x
c ∈ R.
In the following paragraph we show how our dynamic single-crossing condition, cut-o
rules and the transfer simplify to the results well-known from static mechanism design. The
6Both
Mirrlees and Guesnerie & Laont analyze a more general setting as they do not assume that the agent
is risk-neutral or put dierently that his utility is linear in the transfer.
15
generator
Lg
equals
1
E [g(t + ∆, Xt+∆ ) − g(t, x) | Xt = x]
∆&0 ∆
g(t + ∆, x) − g(t, x)
∂
= lim
= g(t, x) .
∆&0
∆
∂t
(Lg)(t, x) = lim
Thus the dynamic single-crossing condition (1) simplies to
t ∈ [0, T ]
and all
x ∈ R.
As the process
X
b
barrier
X
a version of the process
b.
x
for all
is constant, for every barrier there exists a
decreasing barrier that induces the same stopping time.
we restrict attention to decreasing barriers
∂
g(t, x) decreasing in
∂t
Hence without loss of generality
It is easy to check that for every decreasing
reected at
b
is given by
X̃st,x = min{x, b(t)} .
From the fact that the reected version of the process
t,b(t)
X̃s
started on the barrier at time
t stays on the barrier at all future times s > t follows that it is deterministic and given
t,b(t)
X̃s
= b(s). Hence the transfer implementing the stopping time τb equals
ˆ T
ˆ T
ˆ T
∂
∂
t,b(t)
(Lg)(s, X̃s )ds = E
π(t) = E
g(s, b(s))ds =
g(s, b(s))ds .
∂t
∂t
t
t
t
Finally we show that the transfer
π(τ (x))
Proposition 13. Let
π(τ (x))
Proof.
for all
τ : [x, x] → [0, T ]
x ∈ [x, x].
Recall that
π̂
is given by
ˆ
equals the transfer
π̂(x)
up to a constant.
be measurable and non-increasing then
x
∂x g(τ̂ (z), z)dz − g(τ̂ (x), x) + c ,
π̂(x) =
x
for some constant
c ∈ R.
We x
ˆ
x ∈ [x, x]
and compute
x
π̂(x) − c =
∂x g(τ̂ (z), z) − ∂x g(τ̂ (x), z)dz − g(τ̂ (x), x)
x
ˆ
x
ˆ
τ (z)
∂t ∂x g(s, z)dsdz − g(τ̂ (x), x).
=
x
τ (x)
16
by
π̂(x) =
Then Fubini's Theorem implies
ˆ
τ (x)
ˆ
b(s)
∂x ∂t g(s, z)dzds − g(τ (x), x)
π̂(x) − c =
τ (x)
ˆ
x
τ (x)
∂t g(s, b(s)) − ∂t g(s, x)ds − g(τ (x), x)
=
τ (x)
ˆ
τ (x)
∂t g(s, b(s))ds − g(τ (x), x).
=
Choosing
4.3.
c=
τ (x)
´T
τ (x)
∂t g(s, b(s))ds + g(τ (x), x)
yields
π̂(x) = π(τ (x)).
Monotone Increasing Processes and Decreasing Cut-O.
In this section we
restrict attention to increasing processes and stopping times with decreasing cut-o
easy to check that for every decreasing barrier
b
a version of the process
X
b.
reected at
It is
b
is
given by
X̃st,x = min{x, b(t)} .
From the fact that the reected version of the process
t,b(t)
X̃s
started on the barrier at time
t stays on the barrier at all future times s > t follows that it is deterministic and given
t,b(t)
X̃s
= b(s). Hence the transfer implementing the stopping time τb equals
ˆ T
ˆ T
ˆ T
t,b(t)
(4.1)π(t) = E
(Lg)(s, b(s))ds =
(Lg)(s, b(s))ds .
(Lg)(s, X̃s )ds = E
t
t
4.4.
Search with Recall.
recall.
t
In the next section we apply our result to (job) search with
Oers arrive according to a Poisson process
(wi )i∈N are
G : R → R. Xts,t is
Oers
by
(Nt )t∈[0,T ]
with constant rate
λ > 0.
identically and independently distributed according to the distribution
the best oer the agent got in the past, where we assume that the agent
started with an oer of
x∈R
at time
s
Xts,x = max{wi | i ≤ Nt − 1} ∨ z .
We assume that the agent receives a nal payo
The generator of
g
equals
ˆ
(Lg)(t, x) = −rx + λ
g(t, x) = e−rt x
and a ow payo of zero.
∞
(1 − G(z))dz .
x
G(z) ≤ 1 the generator is monotone decreasing in x and thus the single-crossing condition
is satised. By denition the process X is monotone increasing and by equation (4.1) the
transfer that implements a monotone cut-o b is given by
ˆ T
ˆ T
ˆ ∞
π(t) =
(Lg)(s, b(s))ds =
−rb(s) + λ
(1 − G(z))dzds .
As
t
t
b(s)
17
4.5.
Application to Optimal Stopping.
As an immediate consequence of Theorem (5)
we establish a link between reected processes and optimal stopping rules. If a stopping rule
τ?
is implemented by a constant transfer, then
sup E
(4.2)
τ ∈T
ˆ
τ
τ?
is optimal in the stopping problem
h(t, Xt )dt + g(τ, Xτ ) .
0
This observation leads to the following purely probabilistic sucient condition for optimal
stopping rules.
Corollary 14. Let b : [0, T ] → R be a barrier such that the reected process satises
E
ˆ
T
h(s, X̃st,b(t) )
+
(Lg)(s, X̃st,b(t) )ds
=0
t
for all t ∈ [0, T ]. Then the associated cut-o rule τb solves the optimal stopping problem
(4.2).
Conclusion
We have shown under weak assumptions that in optimal stopping settings a stopping rule
that is optimal for the principal can be implemented by a simple posted-price mechanism.
The new approach we introduced is a forward construction of transfers. The transfer is the
expected payo evaluated at the process reected at the time-dependent cut-o one wants
to implement.
It is an interesting question for future research whether a similar approach can be used in
environments where non cut-o rules are of interest. Two such situations arise naturally.
First, with multiple agents, the socially-ecient cut-o depends not only on time but also
on the signals of the other agents. We think that a generalization of the method developed
in this paper can be used to implement the principal-optimal behavior in this multi-agent
settings. As the cut-o depends on the other agents' signals, one needs to dene processes
reected at stochastic barriers. If one denes payments as expected payos evaluated at the
process reected at the stochastic cut-o, we conjecture that our implementability result
(Theorem 5) holds also for those generalized stochastic cut-os.
The payment, however,
will depend on the other agents' signals and, thus, the mechanism will require constant
communication between the principal and the agents.
A second, more challenging, problem is revenue maximization. For special cases the revenue maximizing policy depends only on the initial and the current signal. In those cases
one might be able to use the method developed here for revenue maximization by oering
at time zero a menu of posted-price mechanisms.
Those extensions illustrate that posted-price transfers without communication are often
insucient in more general dynamic setups. We hope, however, that due to its simplicity
18
and the explicit characterization of transfers, our result will prove useful to introduce private
information into the wide range of economic situations that are modeled as single-agent
optimal stopping problems.
Appendix
Appendix A.
thatµ, σ and
γ
We impose the following assumptions on the coecients in (2.1). We assume
are Lipschitz continuous, i.e. there exist positive constants
L
and
L(z)
such
that
|µ(t, x) − µ(t, y)| + |σ(t, x) − σ(t, y)| ≤ L|x − y|
|γ(t, x, z) − γ(t, y, z)| ≤ L(z)|x − y|
for all
t ∈ [0, T ] and x, y ∈ R.
Moreover, we assume that these functions are of linear growth,
K
i.e. there exist positive constants
and
K(z)
such that
|µ(t, x)| + |σ(t, x)| ≤ K(1 + |x|)
|γ(t, x, z)| ≤ K(z)(1 + |x|)
for all
t ∈ [0, T ]
and
x ∈ R.
Furthermore the constants
ˆ
K(z)
satisfy
p ≥ 2.
Proof of Lemma 6.
Let us rst show monotonicity of
the continuation value satises
w (t, x) = sup E
π
ˆ
τ ∈Tt,T
for all
and
K(z)p + L(z)p ν(dz) < ∞
R
for all
L(z)
(t, x) ∈ [0, T ] × R.
τ
h(s, Xst,x )
+
Lg(s, Xst,x )ds
By Dynkin's formula
+ π(τ ) − π(t)
t
The dynamic single-crossing condition and Equation (2.2) imply
that the ow payos given that
payos if it started in
x 7→ wπ (t, x).
X
started in a higher level
x0 ≥ x
are smaller than the ow
x
0
0
h(s, Xst,x ) + Lg(s, Xst,x ) ≤ h(s, Xst,x ) + Lg(s, Xst,x )
s ≥ t. Hence, we
x, y ∈ R. We have
for all
and
have
wπ (t, x0 ) ≤ wπ (t, x).
For the Lipschitz continuity x
t ∈ [0, T ]
|wπ (t, x) − wπ (t, y)|
ˆ τ
t,y t,x
t,y t,x
≤ sup E
h(s, Xs ) − h(s, Xs ) ds + g(τ, Xτ ) − g(τ, Xτ ) + |g(t, x) − g(t, y)| .
τ ∈Tt,T
t
19
Let
C
denote the Lipschitz constants of
h
g,
and
i.e.
|h(t, x) − h(t, y)| + |g(t, x) − g(t, y)| ≤ C|x − y|
Then we have
|wπ (t, x) − wπ (t, y)| ≤ 2C E
"
#
t,x
sup Xs − Xst,y + |x − y| .
s∈[t,T ]
C̃
By Theorem 3.2 in Kunita there exists a constant
C̃|x − y|,
such that
E sups∈[t,T ] |Xst,x − Xst,y | ≤
which yields the claim.
Appendix B.
Proof of Proposition 4.
For case b) it is straightforward to verify that
X̃sτ,η = min{Xsτ,η , b(s)}
satises all the conditions from the denition of a reected process.
For case a) we show
that the solution to a reected stochastic dierential equation (RSDE) is a reected version
of
X.
A solution to a RSDE with initial condition
satises the equation
ˆ
X̃s = η +
ˆ
s
Moreover,
X̃
is a pair of processes
(X̃, l)
σ(r, X̃r− )dWr − ls ,
t
is constrained to stay below the barrier
X̃s ≤ b(s)
3.4).
Existence of
(X̃, l)
l is non´T
b(s) −
t
and the process
decreasing and minimal in the sense that it only increases on the barrier, i.e.
X̃s dls = 0.
which
s
µ(r, X̃r )dr +
t
(t, η)
follows from Slominski and Wojciechowski (2010; Theorem
Conditions (3.1), (3.1) and (3.1) are satised by denition.
Furthermore pathwise
uniqueness holds, which implies condition (3.1). Note that the solution to the unreected
SDE (2.1) solves the RSDE for
s < τb .
As the solution to the RSDE is unique (3.1) follows.
It remains to verify conditions (3.1) and (3.1). For
ξ1 , ξ2 ∈ R we write (X̃ i , li ) = (X̃ 0,ξi , l0,ξi ),
= 1, 2) and introduce the process ∆s = X̃s1 − X̃s2 . Applying the Meyer-Itô formula Protter
2
(2005; Theorem 71, Chapter 4) to the function x 7→ max(0, x) yields
ˆ s
2
2
max(0, ∆s ) = max(0, ∆0 ) + 2
1{∆r >0} ∆r d∆cr
0
ˆ s
X
+
1{∆r >0} dh∆icr +
max(0, ∆r )2 − max(0, ∆r− )2 ,
(i
0
where
σ
∆c
denotes the continuous part of
implies
ˆ
ˆ
s
1{∆r >0} dh∆icr
0
0<r≤s
∆.
For the last integral the Lipschitz continuity of
ˆ
s
1{∆r >0} (σ(r, X̃r1 )
=
0
−
20
σ(r, X̃r2 ))2 dr
s
max(0, ∆r )2 dr.
≤K
0
The rst integral decomposes into the following terms, which we will consider successively.
By the Lipschitz continuity of
ˆ
b
we have
1{∆r >0} ∆r (b(r, X̃r1 )
2
ˆ
s
−
b(r, X̃r2 ))dr
s
max(0, ∆r )2 dr.
≤ 2K
0
0
Moreover, it follows from the Lipschitz continuity of
ˆ
σ
that the process
s
1{∆r >0} ∆r (σ(r, X̃r1 ) − σ(r, X̃r2 ))dWr
s 7→ 2
0
0.
is a martingale starting in
Hence, it vanishes in expectation. Next, we have
ˆ
s
1{∆r >0} ∆r dlr1,c ≤ 0
−2
0
ˆ
and
ˆ
s
1{∆r >0} ∆r dlr2,c
2
=2
0
0
s
1{X̃r1 >b(r)} ∆r dlr2,c = 0.
Putting everything together, we obtain
E[2
ˆ
ˆ
s
1{∆r >0} ∆r d∆cr ]
≤ 2K
0
s
E[max(0, ∆r )2 ]dr.
0
r ∈ (0, s] such that max(0, ∆r )2 >
max(0, ∆r− )2 . This implies ∆r > 0 and ∆r > ∆r− . Since X̃ i jumps if and only if li jumps
2
2
1
1
2
2
2
1
(i = 1, 2), this is equivalent to X̃r > X̃r and lr − lr− > lr − lr− . We have lr − lr− > 0,
1
2
2
because l is non-decreasing. Hence, l jumps at r , which implies that X̃r = b(r). Thus, we
1
obtain the contradiction X̃r > b(r). This implies
ˆ s
2
2
E[max(0, ∆s ) ] ≤ max(0, ∆0 ) + 3K E[max(0, ∆r )2 ]dr.
Considering the jump terms, assume that there exists
0
Then Gronwall's Lemma yields
For
t>0
yields for
E[max(0, ∆s ) ] ≤ C max(0, ∆0 )2
2
C > 0.
conditional to Ft
for some constant
performing the same computations with the expectation taken
ξ1 , ξ2 ∈ L2 (Ft )
E[max(0, X̃s1 − X̃s2 )2 |Ft ] ≤ C max(0, ξ1 − ξ2 )2
for all
s ∈ [t, T ].
If
ξ1 ≤ ξ2
this directly yields (3.1).
argument.
21
Claim (3.1) follows by the same
References
Bergemann, D. and J. Välimäki (2010): The Dynamic Pivot Mechanism,
rica, 78, 771789.
Dixit, R. and R. Pindyck (2008):
Investment under Uncertainty,
Economet-
Princeton university
press.
Guesnerie, R. and J. Laffont (1984): A Complete Solution to a Class of Principal-
Agent Problems with an Application to the Control of a Self-Managed Firm,
Public Economics, 25, 329369.
Jacka, S. and J. Lynn (1992):
Journal of
Finite-Horizon Optimal Stopping, Obstacle Problems
and the Shape of the Continuation Region,
Stochastics: An International Journal of
Probability and Stochastic Processes, 39, 2542.
Ladyzhenskaja, O., V. Solonnikov, and N. Ural'ceva (1968):
Linear and Quasi-
Linear Equations of Parabolic Type, Translations of Mathematical Monographs, American
Mathematical Society.
Mirrlees, J. (1971): An Exploration in the Theory of Optimum Income Taxation,
Review of Economic Studies, 175208.
The
Pavan, A., I. Segal, and J. Toikka (2012): Dynamic Mechanism Design, .
Peng, S. and X. Zhu (2006): Necessary and sucient condition for comparison theorem of
1-dimensional stochastic dierential equations,
Stochastic processes and their applications,
116, 370380.
Protter, P. (2005):
Stochastic Integration and Dierential Equations,
Applications of
Mathematics, Springer.
Sannikov, Y. (2008):
A continuous-time version of the principal-agent problem,
Review of Economic Studies, 75, 957984.
The
Slominski, L. and T. Wojciechowski (2010): Stochastic Dierential Equations with
Jump Reection at Time-Dependent Barriers,
tions, 120, 1701 1721.
Stochastic Processes and their Applica-
Williams, N. (2011): Persistent private information,
22
Econometrica, 79, 12331275.